
定在波レーダ装置及び定在波レーダの相対速度距離測定方法
【課題】相対速度を測定する時間領域と距離を測定する時間領域とを時間的に分割して、より正確に測定対象までの距離と相対速度を測定することのできる定在波レーダ装置を提供する。
【解決手段】本発明の定在波レーダ装置1では、相対速度を測定する時間領域では所定周波数の送信信号が発振器2によって発振され、距離を測定する時間領域では周波数を段階的に変化させた送信信号が発振される。送信器3はこの送信信号を送出し、定在波を受信器4が検出する。そして、信号処理器5が定在波の振幅値の時間変動に基づいて相対速度を算出し、周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出し、相対速度の値を使用して算出された距離の誤差を補正する。
【解決手段】本発明の定在波レーダ装置1では、相対速度を測定する時間領域では所定周波数の送信信号が発振器2によって発振され、距離を測定する時間領域では周波数を段階的に変化させた送信信号が発振される。送信器3はこの送信信号を送出し、定在波を受信器4が検出する。そして、信号処理器5が定在波の振幅値の時間変動に基づいて相対速度を算出し、周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出し、相対速度の値を使用して算出された距離の誤差を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、定在波を利用したレーダ装置に係り、特に測定対象へ送出された送信信号とその反射信号とによって形成される定在波を検出して測定対象までの距離と相対速度を測定する定在波レーダ装置及びその方法に関する。
【背景技術】
【0002】
測定対象との間の相対速度及び距離を測定する従来のレーダ装置としては、電子情報通信学会論文誌VOL.J87-B No.3 pp440の図3に開示されている定在波を用いた近距離高分解能レーダがある。この従来例では、発振源から出力される発振信号の初期周波数f01及びf02に対して、それぞれ二つのステップ周波数Δf1及びΔf2を設定し、それぞれのΔfに対して定在波を検出して周波数と定在波の振幅値からなる検出信号関数を形成する。そして、この検出信号関数の周期から測定対象との相対速度を含む距離を算出し、二つの相対速度に起因する誤差を含む距離から相対速度と距離を算出している。このレーダ装置によれば、測定対象が移動体であっても、二つのΔfを設けたことによって、算出した距離は相対速度の影響を受けず、従って測定対象との間の距離及び相対速度の測定を実現することができる(非特許文献1参照)。
【非特許文献1】藤森新五、外2名,「移動体の位置と速度が測定可能な定在波を用いた近距離高分解能レーダ」,電子情報通信学会論文誌,2004年3月,B VOL.J87-B,No.3,pp.437-445
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述した従来例では、二つのステップ周波数Δfを設けているために、ステップ周波数Δfで距離測定の分解能が定まり、周波数変調全体の周波数変位幅で最大検知距離が定まるので、ステップ周波数Δfの大きい方に分解能が依存し、全体の周波数変位幅の小さい方に最大検知距離が依存してしまうために、利用するステップ周波数Δfの細かさと全体の周波数変位幅の広さに対して精度が悪くなってしまうという問題点があった。
【課題を解決するための手段】
【0004】
上述した課題を解決するために、本発明の定在波レーダ装置は、定在波を検出して測定対象までの距離と相対速度を測定する定在波レーダ装置であって、相対速度を測定する時間領域である相対速度測定領域では所定周波数の送信信号を発振し、距離を測定する時間領域である距離測定領域では周波数を段階的に変化させた送信信号を発振する発振手段と、前記発振手段から出力された送信信号を測定対象へ送出する送信手段と、前記送信信号と前記測定対象による前記送信信号の反射信号とによって形成される定在波を検出する受信手段と、前記相対速度測定領域では検出された定在波の振幅値の時間変動に基づいて相対速度を算出し、前記距離測定領域では段階的に周波数を変化させる各周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出し、算出された前記相対速度の値を使用して算出された前記距離の誤差を補正する信号処理手段とを備えていることを特徴とする。
【0005】
また、本発明の定在波レーダの相対速度距離測定方法は、定在波を検出して測定対象までの距離と相対速度を測定する定在波レーダの相対速度距離測定方法であって、相対速度を測定する時間領域である相対速度測定領域では所定周波数の送信信号を発振し、距離を測定する時間領域である距離測定領域では周波数を段階的に変化させた送信信号を発振する発振ステップと、前記発振ステップで出力された送信信号を測定対象へ送出する送信ステップと、前記送信信号と前記測定対象による前記送信信号の反射信号とによって形成される定在波を検出する受信ステップと、前記相対速度測定領域では検出された定在波の振幅値の時間変動に基づいて相対速度を算出し、前記距離測定領域では段階的に周波数を変化させる各周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出し、算出された前記相対速度の値を使用して算出された前記距離の誤差を補正する信号処理ステップとを含むことを特徴とする。
【発明の効果】
【0006】
本発明に係る定在波レーダ装置では、相対速度測定領域と距離測定領域を時間的に分割し、相対速度測定領域では発振手段によって発振される周波数を一定にして定在波の観測を行い、距離測定領域では発振手段によって発振される周波数を段階的に変化させながら定在波の観測を行うので、相対速度測定領域で得られた相対速度を使用して距離測定領域で得られる距離の値を補正することができ、これによってより正確な相対速度と距離の測定を行うことができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明に係わる定在波レーダ装置及び定在波レーダの相対速度距離測定方法の実施例について説明する。
【実施例1】
【0008】
図1は本実施例に係る定在波レーダ装置の構成を示すブロック図である。
【0009】
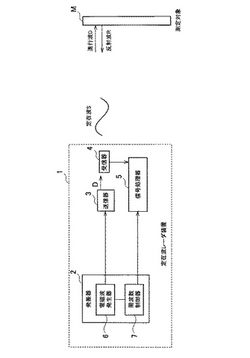
図1に示すように、本実施例の定在波レーダ装置1は、異なる周波数の送信信号を発振する発振器(発振手段)2と、発振器2で発振された送信信号を測定対象Mへ送出する送信器(送信手段)3と、送信信号による進行波Dと測定対象Mによる送信信号の反射波Rとによって形成される定在波Sを検出する受信器(受信手段)4と、受信器4で検出された定在波Sに基づいて測定対象Mまでの距離と相対速度を算出する信号処理器(信号処理手段)5とを備えている。
【0010】
ここで、発振器2は電磁波発生器6と周波数制御器7とから構成され、電磁波発生器6は例えばVCOであり、周波数制御器7は電磁波発生器6が出力する信号の周波数fを制御するためのものである。また、周波数制御器7は発振器2の送信信号の周波数に関する情報、例えば周波数fの数値を信号処理器5に出力する。そして、発振器2は、相対速度を測定する時間領域である相対速度測定領域では所定周波数の送信信号を発振し、距離を測定する時間領域である距離測定領域では周波数を段階的に変化させた送信信号を発振する。
【0011】
送信器3は、例えばアンテナや増幅器などによって構成され、発振器2で出力された送信信号を測定対象Mへ送出している。
【0012】
受信器4は、例えば送信器3のアンテナ部に内蔵される検波器や増幅器などによって構成され、送信信号による進行波Dと反射波Rとによって形成される定在波Sを検出し、定在波Sに対応する定在波検出信号を出力する。
【0013】
信号処理器5は、CPUなどの演算手段やROM及びRAMなどの記憶手段、送受信信号I/Fなどによって構成され、相対速度測定領域では検出された定在波の振幅値の時間変動に基づいて相対速度を算出し、距離測定領域では段階的に周波数を変化させる各周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出する。そして、算出した相対速度の値を使用して算出した距離の誤差を補正している。
【0014】
また、本実施例で用いるレーダとしては、電波を用いる電波レーダや赤外光を用いるレーザレーダ、音波を用いる超音波センサなどであってもよいし、さらに電波レーダの中でも、FM−CW方式に代表されるような連続波を用いたレーダであってもよい。
【0015】
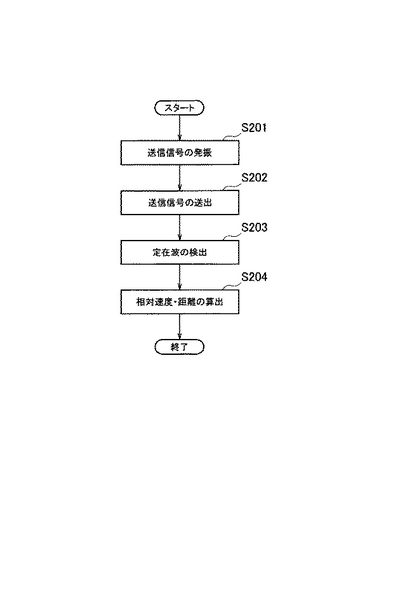
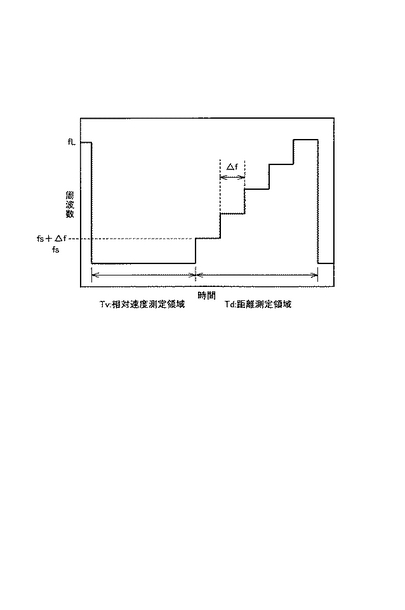
次に、本実施例の定在波レーダ装置1の基本動作を図面に基づいて説明する。図2は本実施例の定在波レーダ装置1による相対速度及び距離の算出処理を示すフローチャートである。図2に示すように、まず発振器2で送信信号の発振を行う(S201)。ここで、周波数制御器7における周波数の制御方法を図3に基づいて説明する。図3に示すように、周波数制御器7は、相対速度を測定するための時間領域である相対速度測定領域Tvと距離を測定するための時間領域である距離測定領域Tdの二つの時間領域に分割する。そして、相対速度の測定に十分な時間である測定時間Tvの間だけ初期周波数fsを保った後、所定時間Δtごとに初期周波数fsに対してステップ周波数Δfだけ増やしていき、最終周波数fLまで周波数変調を行う。ここで、所定時間Δtは反射信号が観測されるために必要な時間よりも長く設定され、例えば3μ秒に設定される。
【0016】
次に、送信器3は発振器2で発振された周波数の電磁波である送信信号を測定対象Mに向けて送出する(S202)。この送信信号の進行波Dは測定対象Mで反射し、反射信号となる。そして、送信信号と同一周波数の反射波Rが送信信号の進行波Dと干渉し、測定対象Mとの間に定在波Sが形成される。受信器4は、この定在波Sの振幅を検出し(S203)、定在波Sの振幅値spに対応する定在波検出信号と定在波検出時刻tを信号処理器5に出力する。
【0017】
ここで、周波数変調を行う時刻から所定時間τ後に受信器4で検出される定在波をサンプリングしているので、上記定在波検出時刻tは、
t=τ+Δt*n ・・・(1)
で表される。但し、nは整数である。このときの周波数fは
f=fs+Δf*(t−τ)/Δt ・・・(2)
で表される。
【0018】
次に、信号処理器5によって相対速度及び測定対象Mまでの距離の算出処理が行われる(S204)。ここで、信号処理器5で行われる相対速度及び測定対象Mまでの距離の算出処理を図4に基づいて説明する。
【0019】
図4に示すように、まず信号処理器5は、発振器2から周波数情報を取得して初期周波数fsを記憶し(S401)、受信器4から入力された定在波検出信号によって定在波の振幅値spと定在波検出時刻tを取得して記憶する(S402)。
【0020】
そして、定在波検出時刻tに対応する振幅値spからなる速度検出信号配列Av(t,sp)を形成し(S403)、次に定在波の周波数fに対する振幅値spからなる距離検出信号配列Ad(f,sp)を形成する(S404)。
【0021】
こうして速度検出信号配列Av(t,sp)と距離検出信号配列Ad(f,sp)が形成されると、信号処理器5に発振器2から周波数情報が入力され、信号処理器5は周波数fを記憶し(S405)、次に受信器4から入力された定在波検出信号によって定在波の振幅値spと定在波検出時刻tを記憶する(S406)。
【0022】
そして、記憶した周波数fが初期周波数fsであるか否かを判定し(S407)、初期周波数fsである場合は定在波検出時刻tに対応する振幅値spからなる速度検出信号配列Av(t,sp)を形成して記憶する(S408)。一方、ステップS407において周波数fが初期周波数fsでない場合には、定在波の周波数fに対する振幅値spからなる距離検出信号配列Ad(f,sp)を形成して記憶する(S409)。
【0023】
次に、ステップS405において記憶した周波数fが最終周波数fLであるか否かを判定し(S410)、最終周波数fLでないときにはステップS405に戻って上述したステップS405からステップS409までの処理を行う。
【0024】
また、ステップS410において周波数fが最終周波数fLであるときには、信号処理器5によって速度検出信号配列Av(t,sp)がフーリエ変換されてドップラー周波数が算出され(S411)、さらに相対速度vを算出する(S412)。相対速度vが算出されると、次に信号処理器5は距離検出信号配列Ad(f,sp)をフーリエ変換し、相対速度vに起因する誤差を含む距離dを算出する(S413)。相対速度による誤差を含む距離dは、式(3)によって算出される。
【0025】
d=d0+vt_s+v((Δt/Δf)*f0+τ)・・・(3)
そして、信号処理器5は、相対速度v及びステップ周波数Δf、所定時間Δt、測定開始時刻ts、定在波Sを検知するまでの時間τから式(4)によって距離d0を算出し(S414)、算出した結果を出力して(S415)本実施例の定在波レーダ装置1による相対速度及び距離の算出処理を終了する。
【0026】
d0=d−v((Δt/Δf)*f0+τ)・・・(4)
上述したように、本実施例の定在波レーダ装置1では、相対速度測定領域と距離測定領域を時間的に分割し、相対速度測定領域では発振器2によって発振される周波数を一定にして定在波の観測を行い、距離測定領域では発振器2によって発振される周波数を段階的に変化させながら定在波の観測を行うので、相対速度測定領域で得られた相対速度を使用して距離測定領域で得られる距離の値を補正することができ、これによってより正確な相対速度と距離の測定を行うことができる(請求項1、4の効果)。
【実施例2】
【0027】
次に、本発明の実施例2を図面に基づいて説明する。図5は本実施例の定在波レーダ装置の構成を示すブロック図である。
【0028】
図5に示すように、本実施例の定在波レーダ装置51は、サンプリングタイミング補正部8をさらに備えたことが実施例1と異なっている。ただし、その他の構成及び各部で行われる処理は実施例1と同様なので詳しい説明は省略する。
【0029】
サンプリングタイミング補正部8は、受信器4と信号処理器5に接続され、例えばCPUなどの演算装置やROM、RAMなどの記憶手段、信号入出力端子などから構成されている。そして、信号処理器5で算出された相対速度に基づいて定在波の位相の変化時間を求め、この変化時間に応じて距離測定領域におけるサンプリングタイミングを補正している。
【0030】
そして、受信器4では、サンプリングタイミング補正部8から定在波のサンプリングタイミングを調整する変化時間αが入力され、周波数変化タイミングから時間τ+αで定在波の検出を行い、定在波の振幅値spに対応する定在波検出信号を信号処理器5に出力する。
【0031】
ここで、サンプリングタイミング補正部8によるサンプリングタイミングの補正処理を図6に基づいて説明する。図6は本実施例の定在波レーダ装置51のサンプリングタイミング補正部8によるサンプリングタイミングの補正処理を示すフローチャートである。
【0032】
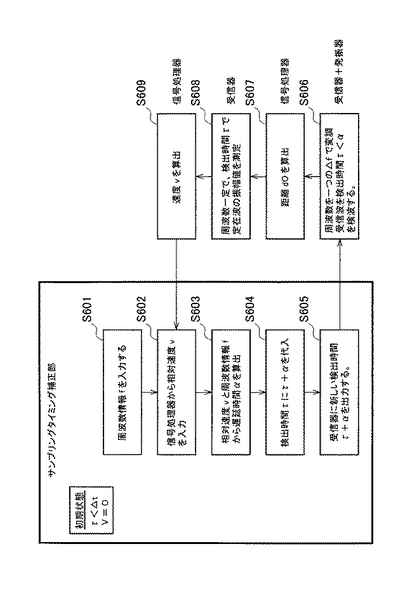
図6に示すように、まずサンプリングタイミング補正部8は、信号処理器5から発振器2の周波数情報fを取得し(S601)、次に相対速度vを取得する(S602)。そして、周波数情報fと相対速度vから、相対速度vによる誤差を含まない検出時間τについての変化時間αを算出し(S603)、検出時間τにτ+αを代入して(S604)この新しい検出時間τ+αを受信器4に出力する(S605)。
【0033】
これにより発振器2では周波数を1つのΔfで変調し、受信器4では検出時間τ+αで受信信号をサンプリングして定在波検出信号を出力する(S606)。この定在波検出信号を取得した信号処理器5では、距離d0を算出する(S607)。
【0034】
また、受信器4では周波数一定、検出時間τでサンプリングして定在波の振幅値spを測定して定在波検出信号を出力する(S608)。この定在波検出信号を取得した信号処理器5では相対速度vを算出し(S609)、サンプリングタイミング補正部8に出力する。以後上述した処理を繰り返し行う。
【0035】
このサンプリングタイミングの補正処理により、サンプリングタイミング補正部8が相対速度vから定在波のサンプリングタイミングの補正量αを求め、この補正量αによって受信器4が定在波の補正サンプリングを行って相対速度vに影響を受けない定在波検出信号を出力する。すなわち、信号処理器5に入力される定在波検出信号は相対速度vの影響を受けていない。
【0036】
従って、信号処理器5では距離d0を出力するために、式(3)の演算を必要とせず、検出された距離検出信号配列Ad(f,sp)のフーリエ変換は相対速度vを含まない距離d0を出力することができ、これにより距離検出信号配列Ad(f,sp)から正確な距離d0を算出することができる。
【0037】
このように、本実施例の定在波レーダ装置51では、相対速度測定領域で検出された相対速度の値から定在波の位相変化量を算出し、この位相変化量に応じて距離測定領域の受信信号のサンプリングタイミングを変化させるので、相対速度を原因とする距離の誤差を除去することができ、距離測定領域において正確な距離を算出することができる(請求項2、5の効果)。
【実施例3】
【0038】
次に、本発明の実施例3を図面に基づいて説明する。図7は本実施例の定在波レーダ装置の構成を示すブロック図である。
【0039】
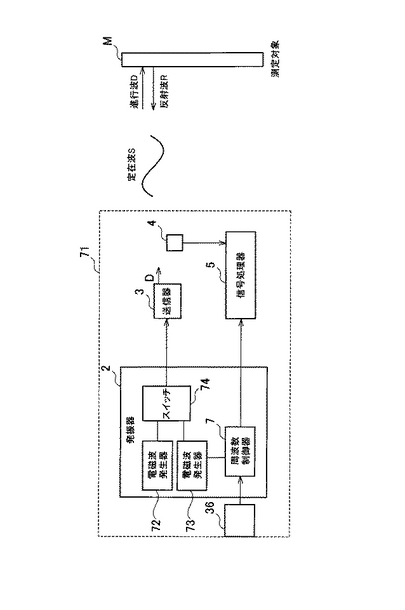
図7に示すように、本実施例の定在波レーダ装置71は、初期周波数fsを発振する電磁波発生器72と、初期周波数fsに対して所定時間Δtごとにステップ周波数Δfだけ増加させていく電磁波発生器73の2つの電磁波発生器を備え、スイッチ74で2つの電磁波発生器72、73を切り替えるようにしたことが、実施例1と異なっている。ただし、その他の構成及び各部で行われる処理は実施例1と同様なので詳しい説明は省略する。
【0040】
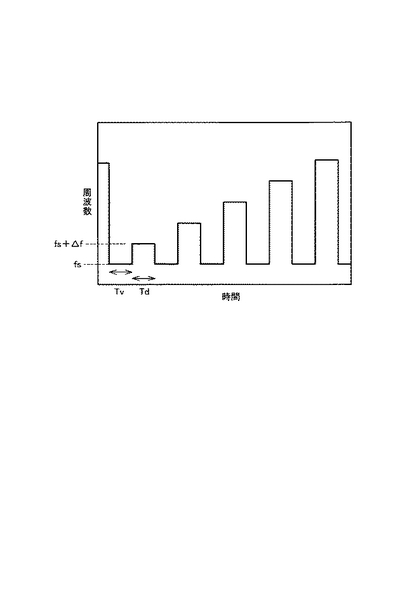
実施例1では、発振器2は相対速度測定領域の間、初期周波数fsを発振し続け、その後の距離測定領域にステップ周波数Δfを増加させるように周波数制御器7が制御していたのに対して、実施例3では、図8に示すように相対速度測定領域Tvと距離測定領域Tdとが周波数変化タイミングごとに交互に繰り返されるように制御されている点が異なっている。
【0041】
このように、本実施例の定在波レーダ装置71では、2つの電磁波発生器72、73を設けて、相対速度測定領域Tvと距離測定領域Tdとを周波数変化タイミングごとに交互に切り替えるようにしたので、相対速度vと距離d0の測定時間帯をほぼ同一にすることができ、相対速度vと距離d0の精度を向上させることができる(請求項3、6の効果)。
【0042】
以上、本発明の定在波レーダ装置について、図示した実施例に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は同様の機能を有する任意の構成のものに置き換えることができる。
【図面の簡単な説明】
【0043】
【図1】本発明の実施例1に係る定在波レーダ装置の構成を示すブロック図である。
【図2】本発明の実施例1に係る定在波レーダ装置による相対速度及び距離の算出処理を示すフローチャートである。
【図3】本発明の実施例1に係る定在波レーダ装置による周波数の制御方法を示す図である。
【図4】本発明の実施例1に係る定在波レーダ装置の信号処理器による相対速度及び距離の算出処理を示すフローチャートである。
【図5】本発明の実施例2に係る定在波レーダ装置の構成を示すブロック図である。
【図6】本発明の実施例2に係る定在波レーダ装置によるサンプリングタイミングの補正処理を示すフローチャートである。
【図7】本発明の実施例3に係る定在波レーダ装置の構成を示すブロック図である。
【図8】本発明の実施例3に係る定在波レーダ装置による周波数の制御方法を示す図である。
【符号の説明】
【0044】
1、51、71 定在波レーダ装置
2 発振器(発振手段)
3 送信器(送信手段)
4 受信器(受信手段)
5 信号処理器(信号処理手段)
6、72、73 電磁波発生器
7 周波数制御器
8 サンプリングタイミング補正部
74 スイッチ
D 進行波
M 測定対象
R 反射波
S 定在波
【技術分野】
【0001】
本発明は、定在波を利用したレーダ装置に係り、特に測定対象へ送出された送信信号とその反射信号とによって形成される定在波を検出して測定対象までの距離と相対速度を測定する定在波レーダ装置及びその方法に関する。
【背景技術】
【0002】
測定対象との間の相対速度及び距離を測定する従来のレーダ装置としては、電子情報通信学会論文誌VOL.J87-B No.3 pp440の図3に開示されている定在波を用いた近距離高分解能レーダがある。この従来例では、発振源から出力される発振信号の初期周波数f01及びf02に対して、それぞれ二つのステップ周波数Δf1及びΔf2を設定し、それぞれのΔfに対して定在波を検出して周波数と定在波の振幅値からなる検出信号関数を形成する。そして、この検出信号関数の周期から測定対象との相対速度を含む距離を算出し、二つの相対速度に起因する誤差を含む距離から相対速度と距離を算出している。このレーダ装置によれば、測定対象が移動体であっても、二つのΔfを設けたことによって、算出した距離は相対速度の影響を受けず、従って測定対象との間の距離及び相対速度の測定を実現することができる(非特許文献1参照)。
【非特許文献1】藤森新五、外2名,「移動体の位置と速度が測定可能な定在波を用いた近距離高分解能レーダ」,電子情報通信学会論文誌,2004年3月,B VOL.J87-B,No.3,pp.437-445
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述した従来例では、二つのステップ周波数Δfを設けているために、ステップ周波数Δfで距離測定の分解能が定まり、周波数変調全体の周波数変位幅で最大検知距離が定まるので、ステップ周波数Δfの大きい方に分解能が依存し、全体の周波数変位幅の小さい方に最大検知距離が依存してしまうために、利用するステップ周波数Δfの細かさと全体の周波数変位幅の広さに対して精度が悪くなってしまうという問題点があった。
【課題を解決するための手段】
【0004】
上述した課題を解決するために、本発明の定在波レーダ装置は、定在波を検出して測定対象までの距離と相対速度を測定する定在波レーダ装置であって、相対速度を測定する時間領域である相対速度測定領域では所定周波数の送信信号を発振し、距離を測定する時間領域である距離測定領域では周波数を段階的に変化させた送信信号を発振する発振手段と、前記発振手段から出力された送信信号を測定対象へ送出する送信手段と、前記送信信号と前記測定対象による前記送信信号の反射信号とによって形成される定在波を検出する受信手段と、前記相対速度測定領域では検出された定在波の振幅値の時間変動に基づいて相対速度を算出し、前記距離測定領域では段階的に周波数を変化させる各周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出し、算出された前記相対速度の値を使用して算出された前記距離の誤差を補正する信号処理手段とを備えていることを特徴とする。
【0005】
また、本発明の定在波レーダの相対速度距離測定方法は、定在波を検出して測定対象までの距離と相対速度を測定する定在波レーダの相対速度距離測定方法であって、相対速度を測定する時間領域である相対速度測定領域では所定周波数の送信信号を発振し、距離を測定する時間領域である距離測定領域では周波数を段階的に変化させた送信信号を発振する発振ステップと、前記発振ステップで出力された送信信号を測定対象へ送出する送信ステップと、前記送信信号と前記測定対象による前記送信信号の反射信号とによって形成される定在波を検出する受信ステップと、前記相対速度測定領域では検出された定在波の振幅値の時間変動に基づいて相対速度を算出し、前記距離測定領域では段階的に周波数を変化させる各周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出し、算出された前記相対速度の値を使用して算出された前記距離の誤差を補正する信号処理ステップとを含むことを特徴とする。
【発明の効果】
【0006】
本発明に係る定在波レーダ装置では、相対速度測定領域と距離測定領域を時間的に分割し、相対速度測定領域では発振手段によって発振される周波数を一定にして定在波の観測を行い、距離測定領域では発振手段によって発振される周波数を段階的に変化させながら定在波の観測を行うので、相対速度測定領域で得られた相対速度を使用して距離測定領域で得られる距離の値を補正することができ、これによってより正確な相対速度と距離の測定を行うことができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明に係わる定在波レーダ装置及び定在波レーダの相対速度距離測定方法の実施例について説明する。
【実施例1】
【0008】
図1は本実施例に係る定在波レーダ装置の構成を示すブロック図である。
【0009】
図1に示すように、本実施例の定在波レーダ装置1は、異なる周波数の送信信号を発振する発振器(発振手段)2と、発振器2で発振された送信信号を測定対象Mへ送出する送信器(送信手段)3と、送信信号による進行波Dと測定対象Mによる送信信号の反射波Rとによって形成される定在波Sを検出する受信器(受信手段)4と、受信器4で検出された定在波Sに基づいて測定対象Mまでの距離と相対速度を算出する信号処理器(信号処理手段)5とを備えている。
【0010】
ここで、発振器2は電磁波発生器6と周波数制御器7とから構成され、電磁波発生器6は例えばVCOであり、周波数制御器7は電磁波発生器6が出力する信号の周波数fを制御するためのものである。また、周波数制御器7は発振器2の送信信号の周波数に関する情報、例えば周波数fの数値を信号処理器5に出力する。そして、発振器2は、相対速度を測定する時間領域である相対速度測定領域では所定周波数の送信信号を発振し、距離を測定する時間領域である距離測定領域では周波数を段階的に変化させた送信信号を発振する。
【0011】
送信器3は、例えばアンテナや増幅器などによって構成され、発振器2で出力された送信信号を測定対象Mへ送出している。
【0012】
受信器4は、例えば送信器3のアンテナ部に内蔵される検波器や増幅器などによって構成され、送信信号による進行波Dと反射波Rとによって形成される定在波Sを検出し、定在波Sに対応する定在波検出信号を出力する。
【0013】
信号処理器5は、CPUなどの演算手段やROM及びRAMなどの記憶手段、送受信信号I/Fなどによって構成され、相対速度測定領域では検出された定在波の振幅値の時間変動に基づいて相対速度を算出し、距離測定領域では段階的に周波数を変化させる各周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出する。そして、算出した相対速度の値を使用して算出した距離の誤差を補正している。
【0014】
また、本実施例で用いるレーダとしては、電波を用いる電波レーダや赤外光を用いるレーザレーダ、音波を用いる超音波センサなどであってもよいし、さらに電波レーダの中でも、FM−CW方式に代表されるような連続波を用いたレーダであってもよい。
【0015】
次に、本実施例の定在波レーダ装置1の基本動作を図面に基づいて説明する。図2は本実施例の定在波レーダ装置1による相対速度及び距離の算出処理を示すフローチャートである。図2に示すように、まず発振器2で送信信号の発振を行う(S201)。ここで、周波数制御器7における周波数の制御方法を図3に基づいて説明する。図3に示すように、周波数制御器7は、相対速度を測定するための時間領域である相対速度測定領域Tvと距離を測定するための時間領域である距離測定領域Tdの二つの時間領域に分割する。そして、相対速度の測定に十分な時間である測定時間Tvの間だけ初期周波数fsを保った後、所定時間Δtごとに初期周波数fsに対してステップ周波数Δfだけ増やしていき、最終周波数fLまで周波数変調を行う。ここで、所定時間Δtは反射信号が観測されるために必要な時間よりも長く設定され、例えば3μ秒に設定される。
【0016】
次に、送信器3は発振器2で発振された周波数の電磁波である送信信号を測定対象Mに向けて送出する(S202)。この送信信号の進行波Dは測定対象Mで反射し、反射信号となる。そして、送信信号と同一周波数の反射波Rが送信信号の進行波Dと干渉し、測定対象Mとの間に定在波Sが形成される。受信器4は、この定在波Sの振幅を検出し(S203)、定在波Sの振幅値spに対応する定在波検出信号と定在波検出時刻tを信号処理器5に出力する。
【0017】
ここで、周波数変調を行う時刻から所定時間τ後に受信器4で検出される定在波をサンプリングしているので、上記定在波検出時刻tは、
t=τ+Δt*n ・・・(1)
で表される。但し、nは整数である。このときの周波数fは
f=fs+Δf*(t−τ)/Δt ・・・(2)
で表される。
【0018】
次に、信号処理器5によって相対速度及び測定対象Mまでの距離の算出処理が行われる(S204)。ここで、信号処理器5で行われる相対速度及び測定対象Mまでの距離の算出処理を図4に基づいて説明する。
【0019】
図4に示すように、まず信号処理器5は、発振器2から周波数情報を取得して初期周波数fsを記憶し(S401)、受信器4から入力された定在波検出信号によって定在波の振幅値spと定在波検出時刻tを取得して記憶する(S402)。
【0020】
そして、定在波検出時刻tに対応する振幅値spからなる速度検出信号配列Av(t,sp)を形成し(S403)、次に定在波の周波数fに対する振幅値spからなる距離検出信号配列Ad(f,sp)を形成する(S404)。
【0021】
こうして速度検出信号配列Av(t,sp)と距離検出信号配列Ad(f,sp)が形成されると、信号処理器5に発振器2から周波数情報が入力され、信号処理器5は周波数fを記憶し(S405)、次に受信器4から入力された定在波検出信号によって定在波の振幅値spと定在波検出時刻tを記憶する(S406)。
【0022】
そして、記憶した周波数fが初期周波数fsであるか否かを判定し(S407)、初期周波数fsである場合は定在波検出時刻tに対応する振幅値spからなる速度検出信号配列Av(t,sp)を形成して記憶する(S408)。一方、ステップS407において周波数fが初期周波数fsでない場合には、定在波の周波数fに対する振幅値spからなる距離検出信号配列Ad(f,sp)を形成して記憶する(S409)。
【0023】
次に、ステップS405において記憶した周波数fが最終周波数fLであるか否かを判定し(S410)、最終周波数fLでないときにはステップS405に戻って上述したステップS405からステップS409までの処理を行う。
【0024】
また、ステップS410において周波数fが最終周波数fLであるときには、信号処理器5によって速度検出信号配列Av(t,sp)がフーリエ変換されてドップラー周波数が算出され(S411)、さらに相対速度vを算出する(S412)。相対速度vが算出されると、次に信号処理器5は距離検出信号配列Ad(f,sp)をフーリエ変換し、相対速度vに起因する誤差を含む距離dを算出する(S413)。相対速度による誤差を含む距離dは、式(3)によって算出される。
【0025】
d=d0+vt_s+v((Δt/Δf)*f0+τ)・・・(3)
そして、信号処理器5は、相対速度v及びステップ周波数Δf、所定時間Δt、測定開始時刻ts、定在波Sを検知するまでの時間τから式(4)によって距離d0を算出し(S414)、算出した結果を出力して(S415)本実施例の定在波レーダ装置1による相対速度及び距離の算出処理を終了する。
【0026】
d0=d−v((Δt/Δf)*f0+τ)・・・(4)
上述したように、本実施例の定在波レーダ装置1では、相対速度測定領域と距離測定領域を時間的に分割し、相対速度測定領域では発振器2によって発振される周波数を一定にして定在波の観測を行い、距離測定領域では発振器2によって発振される周波数を段階的に変化させながら定在波の観測を行うので、相対速度測定領域で得られた相対速度を使用して距離測定領域で得られる距離の値を補正することができ、これによってより正確な相対速度と距離の測定を行うことができる(請求項1、4の効果)。
【実施例2】
【0027】
次に、本発明の実施例2を図面に基づいて説明する。図5は本実施例の定在波レーダ装置の構成を示すブロック図である。
【0028】
図5に示すように、本実施例の定在波レーダ装置51は、サンプリングタイミング補正部8をさらに備えたことが実施例1と異なっている。ただし、その他の構成及び各部で行われる処理は実施例1と同様なので詳しい説明は省略する。
【0029】
サンプリングタイミング補正部8は、受信器4と信号処理器5に接続され、例えばCPUなどの演算装置やROM、RAMなどの記憶手段、信号入出力端子などから構成されている。そして、信号処理器5で算出された相対速度に基づいて定在波の位相の変化時間を求め、この変化時間に応じて距離測定領域におけるサンプリングタイミングを補正している。
【0030】
そして、受信器4では、サンプリングタイミング補正部8から定在波のサンプリングタイミングを調整する変化時間αが入力され、周波数変化タイミングから時間τ+αで定在波の検出を行い、定在波の振幅値spに対応する定在波検出信号を信号処理器5に出力する。
【0031】
ここで、サンプリングタイミング補正部8によるサンプリングタイミングの補正処理を図6に基づいて説明する。図6は本実施例の定在波レーダ装置51のサンプリングタイミング補正部8によるサンプリングタイミングの補正処理を示すフローチャートである。
【0032】
図6に示すように、まずサンプリングタイミング補正部8は、信号処理器5から発振器2の周波数情報fを取得し(S601)、次に相対速度vを取得する(S602)。そして、周波数情報fと相対速度vから、相対速度vによる誤差を含まない検出時間τについての変化時間αを算出し(S603)、検出時間τにτ+αを代入して(S604)この新しい検出時間τ+αを受信器4に出力する(S605)。
【0033】
これにより発振器2では周波数を1つのΔfで変調し、受信器4では検出時間τ+αで受信信号をサンプリングして定在波検出信号を出力する(S606)。この定在波検出信号を取得した信号処理器5では、距離d0を算出する(S607)。
【0034】
また、受信器4では周波数一定、検出時間τでサンプリングして定在波の振幅値spを測定して定在波検出信号を出力する(S608)。この定在波検出信号を取得した信号処理器5では相対速度vを算出し(S609)、サンプリングタイミング補正部8に出力する。以後上述した処理を繰り返し行う。
【0035】
このサンプリングタイミングの補正処理により、サンプリングタイミング補正部8が相対速度vから定在波のサンプリングタイミングの補正量αを求め、この補正量αによって受信器4が定在波の補正サンプリングを行って相対速度vに影響を受けない定在波検出信号を出力する。すなわち、信号処理器5に入力される定在波検出信号は相対速度vの影響を受けていない。
【0036】
従って、信号処理器5では距離d0を出力するために、式(3)の演算を必要とせず、検出された距離検出信号配列Ad(f,sp)のフーリエ変換は相対速度vを含まない距離d0を出力することができ、これにより距離検出信号配列Ad(f,sp)から正確な距離d0を算出することができる。
【0037】
このように、本実施例の定在波レーダ装置51では、相対速度測定領域で検出された相対速度の値から定在波の位相変化量を算出し、この位相変化量に応じて距離測定領域の受信信号のサンプリングタイミングを変化させるので、相対速度を原因とする距離の誤差を除去することができ、距離測定領域において正確な距離を算出することができる(請求項2、5の効果)。
【実施例3】
【0038】
次に、本発明の実施例3を図面に基づいて説明する。図7は本実施例の定在波レーダ装置の構成を示すブロック図である。
【0039】
図7に示すように、本実施例の定在波レーダ装置71は、初期周波数fsを発振する電磁波発生器72と、初期周波数fsに対して所定時間Δtごとにステップ周波数Δfだけ増加させていく電磁波発生器73の2つの電磁波発生器を備え、スイッチ74で2つの電磁波発生器72、73を切り替えるようにしたことが、実施例1と異なっている。ただし、その他の構成及び各部で行われる処理は実施例1と同様なので詳しい説明は省略する。
【0040】
実施例1では、発振器2は相対速度測定領域の間、初期周波数fsを発振し続け、その後の距離測定領域にステップ周波数Δfを増加させるように周波数制御器7が制御していたのに対して、実施例3では、図8に示すように相対速度測定領域Tvと距離測定領域Tdとが周波数変化タイミングごとに交互に繰り返されるように制御されている点が異なっている。
【0041】
このように、本実施例の定在波レーダ装置71では、2つの電磁波発生器72、73を設けて、相対速度測定領域Tvと距離測定領域Tdとを周波数変化タイミングごとに交互に切り替えるようにしたので、相対速度vと距離d0の測定時間帯をほぼ同一にすることができ、相対速度vと距離d0の精度を向上させることができる(請求項3、6の効果)。
【0042】
以上、本発明の定在波レーダ装置について、図示した実施例に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は同様の機能を有する任意の構成のものに置き換えることができる。
【図面の簡単な説明】
【0043】
【図1】本発明の実施例1に係る定在波レーダ装置の構成を示すブロック図である。
【図2】本発明の実施例1に係る定在波レーダ装置による相対速度及び距離の算出処理を示すフローチャートである。
【図3】本発明の実施例1に係る定在波レーダ装置による周波数の制御方法を示す図である。
【図4】本発明の実施例1に係る定在波レーダ装置の信号処理器による相対速度及び距離の算出処理を示すフローチャートである。
【図5】本発明の実施例2に係る定在波レーダ装置の構成を示すブロック図である。
【図6】本発明の実施例2に係る定在波レーダ装置によるサンプリングタイミングの補正処理を示すフローチャートである。
【図7】本発明の実施例3に係る定在波レーダ装置の構成を示すブロック図である。
【図8】本発明の実施例3に係る定在波レーダ装置による周波数の制御方法を示す図である。
【符号の説明】
【0044】
1、51、71 定在波レーダ装置
2 発振器(発振手段)
3 送信器(送信手段)
4 受信器(受信手段)
5 信号処理器(信号処理手段)
6、72、73 電磁波発生器
7 周波数制御器
8 サンプリングタイミング補正部
74 スイッチ
D 進行波
M 測定対象
R 反射波
S 定在波
【特許請求の範囲】
【請求項1】
定在波を検出して測定対象までの距離と相対速度を測定する定在波レーダ装置であって、
相対速度を測定する時間領域である相対速度測定領域では所定周波数の送信信号を発振し、距離を測定する時間領域である距離測定領域では周波数を段階的に変化させた送信信号を発振する発振手段と、
前記発振手段から出力された送信信号を測定対象へ送出する送信手段と、
前記送信信号と前記測定対象による前記送信信号の反射信号とによって形成される定在波を検出する受信手段と、
前記相対速度測定領域では検出された定在波の振幅値の時間変動に基づいて相対速度を算出し、前記距離測定領域では段階的に周波数を変化させる各周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出し、算出された前記相対速度の値を使用して算出された前記距離の誤差を補正する信号処理手段と
を備えていることを特徴とする定在波レーダ装置。
【請求項2】
前記信号処理手段で算出された前記相対速度に基づいて、相対速度に起因する定在波の位相の変化時間を求め、この変化時間に応じて前記距離測定領域におけるサンプリングタイミングを補正するサンプリングタイミング補正手段をさらに備えることを特徴とする請求項1に記載の定在波レーダ装置。
【請求項3】
前記発振手段は、前記周波数変化タイミングごとに前記相対速度測定領域と前記距離測定領域とを交互に切り替えることを特徴とする請求項1または2のいずれかに記載の定在波レーダ装置。
【請求項4】
定在波を検出して測定対象までの距離と相対速度を測定する定在波レーダの相対速度距離測定方法であって、
相対速度を測定する時間領域である相対速度測定領域では所定周波数の送信信号を発振し、距離を測定する時間領域である距離測定領域では周波数を段階的に変化させた送信信号を発振する発振ステップと、
前記発振ステップで出力された送信信号を測定対象へ送出する送信ステップと、
前記送信信号と前記測定対象による前記送信信号の反射信号とによって形成される定在波を検出する受信ステップと、
前記相対速度測定領域では検出された定在波の振幅値の時間変動に基づいて相対速度を算出し、前記距離測定領域では段階的に周波数を変化させる各周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出し、算出された前記相対速度の値を使用して算出された前記距離の誤差を補正する信号処理ステップと
を含むことを特徴とする定在波レーダの相対速度距離測定方法。
【請求項5】
前記信号処理ステップで算出された前記相対速度に基づいて、相対速度に起因する定在波の位相の変化時間を求め、この変化時間に応じて前記距離測定領域におけるサンプリングタイミングを補正するサンプリングタイミング補正ステップをさらに含むことを特徴とする請求項4に記載の定在波レーダの相対速度距離測定方法。
【請求項6】
前記発振ステップは、前記周波数変化タイミングごとに前記相対速度測定領域と前記距離測定領域とを交互に切り替えることを特徴とする請求項4または5のいずれかに記載の定在波レーダの相対速度距離測定方法。
【請求項1】
定在波を検出して測定対象までの距離と相対速度を測定する定在波レーダ装置であって、
相対速度を測定する時間領域である相対速度測定領域では所定周波数の送信信号を発振し、距離を測定する時間領域である距離測定領域では周波数を段階的に変化させた送信信号を発振する発振手段と、
前記発振手段から出力された送信信号を測定対象へ送出する送信手段と、
前記送信信号と前記測定対象による前記送信信号の反射信号とによって形成される定在波を検出する受信手段と、
前記相対速度測定領域では検出された定在波の振幅値の時間変動に基づいて相対速度を算出し、前記距離測定領域では段階的に周波数を変化させる各周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出し、算出された前記相対速度の値を使用して算出された前記距離の誤差を補正する信号処理手段と
を備えていることを特徴とする定在波レーダ装置。
【請求項2】
前記信号処理手段で算出された前記相対速度に基づいて、相対速度に起因する定在波の位相の変化時間を求め、この変化時間に応じて前記距離測定領域におけるサンプリングタイミングを補正するサンプリングタイミング補正手段をさらに備えることを特徴とする請求項1に記載の定在波レーダ装置。
【請求項3】
前記発振手段は、前記周波数変化タイミングごとに前記相対速度測定領域と前記距離測定領域とを交互に切り替えることを特徴とする請求項1または2のいずれかに記載の定在波レーダ装置。
【請求項4】
定在波を検出して測定対象までの距離と相対速度を測定する定在波レーダの相対速度距離測定方法であって、
相対速度を測定する時間領域である相対速度測定領域では所定周波数の送信信号を発振し、距離を測定する時間領域である距離測定領域では周波数を段階的に変化させた送信信号を発振する発振ステップと、
前記発振ステップで出力された送信信号を測定対象へ送出する送信ステップと、
前記送信信号と前記測定対象による前記送信信号の反射信号とによって形成される定在波を検出する受信ステップと、
前記相対速度測定領域では検出された定在波の振幅値の時間変動に基づいて相対速度を算出し、前記距離測定領域では段階的に周波数を変化させる各周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出し、算出された前記相対速度の値を使用して算出された前記距離の誤差を補正する信号処理ステップと
を含むことを特徴とする定在波レーダの相対速度距離測定方法。
【請求項5】
前記信号処理ステップで算出された前記相対速度に基づいて、相対速度に起因する定在波の位相の変化時間を求め、この変化時間に応じて前記距離測定領域におけるサンプリングタイミングを補正するサンプリングタイミング補正ステップをさらに含むことを特徴とする請求項4に記載の定在波レーダの相対速度距離測定方法。
【請求項6】
前記発振ステップは、前記周波数変化タイミングごとに前記相対速度測定領域と前記距離測定領域とを交互に切り替えることを特徴とする請求項4または5のいずれかに記載の定在波レーダの相対速度距離測定方法。
【図1】



【図2】
【図3】
【図4】

【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2006−177673(P2006−177673A)
【公開日】平成18年7月6日(2006.7.6)
【国際特許分類】
【出願番号】特願2004−368089(P2004−368089)
【出願日】平成16年12月20日(2004.12.20)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成18年7月6日(2006.7.6)
【国際特許分類】
【出願日】平成16年12月20日(2004.12.20)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]