
定在波測距装置
【課題】 定在波測距装置において、距離測定の高精度と高速化を両立させる。
【解決手段】 信号送受信部2から周波数をステップ状に変化させた送信信号を送出させ、サンプリング部3では受信信号の定在波を送信信号の周波数に同期したタイミングでサンプリングする。第1の距離計測部22で周波数ごとに空間伝播遅延時間に対応するサンプリング波形の振幅変動区間の時間幅に基づいて第1の距離値R1を算出するとともに、第2の距離計測部23で振幅が変動する区間を除く領域の振幅情報を、送信信号の周波数ごとに並べて生成した振動波形の振動周期に基づいて第2の距離値R2を算出する。周波数ステップごとに距離値R1が得られるので、精度の高い距離値R2とともに高速化が図れる。
【解決手段】 信号送受信部2から周波数をステップ状に変化させた送信信号を送出させ、サンプリング部3では受信信号の定在波を送信信号の周波数に同期したタイミングでサンプリングする。第1の距離計測部22で周波数ごとに空間伝播遅延時間に対応するサンプリング波形の振幅変動区間の時間幅に基づいて第1の距離値R1を算出するとともに、第2の距離計測部23で振幅が変動する区間を除く領域の振幅情報を、送信信号の周波数ごとに並べて生成した振動波形の振動周期に基づいて第2の距離値R2を算出する。周波数ステップごとに距離値R1が得られるので、精度の高い距離値R2とともに高速化が図れる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、定在波の観測に基づいて対象物までの距離を測定する定在波測距装置に関する。
【背景技術】
【0002】
送信信号と対象物からの反射信号に基づいて対象物までの距離を測定するレーダとして、とくに定在波を用いて対象物までの距離を測定する測距装置が特開2002−357656号公報に開示されている。これは、送信信号の周波数をステップ状に周波数変調し、対象物からの反射信号により発生する定在波を送信周波数ごとに観測して、定在波間の位相の変化を検出することにより対象物までの距離を算出するものである。この方式は、送信信号送出から反射信号受信までの遅延時間に基づいて距離を算出する方式に比較して、近距離の距離測定においても高い精度が得られる。
ここで、上記公報に示された定在波による距離測定において、距離分解能と最大検知距離を両立させるためには、細かな周波数ステップで広い周波数範囲の周波数変調を行って、定在波の位相観測数を多くする必要がある。
【特許文献1】特開2002−357656号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、レーダに用いる伝播媒体としては電磁波、光、超音波などがあり、例えば車両周りの近傍検出などには簡便な超音波が多く使用されている。
しかし、伝播媒体に超音波を使用する場合には、その伝播速度が電磁波と比較した場合に6桁ほど小さいために、定在波の位相観測数を多くすると観測時間が長くなるという問題がある。
【0004】
また、対象物との間に相対速度が発生している場合には、距離測定値に誤差が含まれてくるので、さらに精度を高めようとするとき、例えば特開2004−325085公報には、周波数ステップの周波数差を異ならせた2つの定在波による測定を行って、上記誤差を補正する方法も提案されている。しかしこの方法では観測時間がさらに2倍必要になる。
以上のように、従来の定在波を使用した測距では高い精度は得られるが時間がかかるという問題を有している。
【0005】
したがって本発明は、上記の問題点にかんがみ、伝播媒体にかかわらず高精度かつ高速に対象物までの距離を測定可能とした定在波測距装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
このため本発明は、周波数をステップ状に変化させた送信信号を送出して、対象物の反射による受信信号の定在波を送信信号の周波数に同期したタイミングでサンプリングするようにし、第1の距離計測部で周波数ごとに上記サンプリングされた信号における振幅が変動する区間の時間幅に基づいて第1の距離値を算出するとともに、第2の距離計測部で上記サンプリングされた信号における振幅が変動する区間を除く領域の振幅情報を、送信信号の周波数ごとに並べて生成した振動波形の振動周期に基づいて第2の距離値を算出して、出力制御部から第1の距離値と第2の距離値とに基づいて対象物までの距離信号を出力するものとした。
【発明の効果】
【0007】
周波数ごとのサンプリング波形において振幅変動が発生している区間の時間幅は空間伝播遅延時間に対応するから、第1距離計測部ではこの遅延時間と媒体の伝播速度とに基づいて第1の距離値が高速に算出できる。
また、第2距離計測部23では振幅が変動していない部分での振幅情報を周波数順に並べた振動波形の振動周期から第2の距離値を算出するから、第2の距離値は従来の定在波を使用した測距によるものと同じく高精度である。
したがって、たとえ伝播速度の低い媒体を用いた場合でも、高速に得られる第1の距離値と高精度の第2の距離値を相互補完して対象物までの距離測定の高精度化と高速化とが両立できる。
【発明を実施するための最良の形態】
【0008】
次に、発明の実施の形態を実施例により説明する。
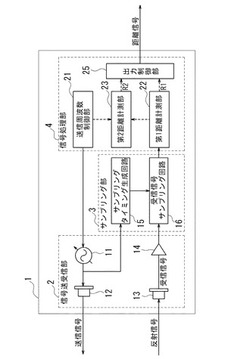
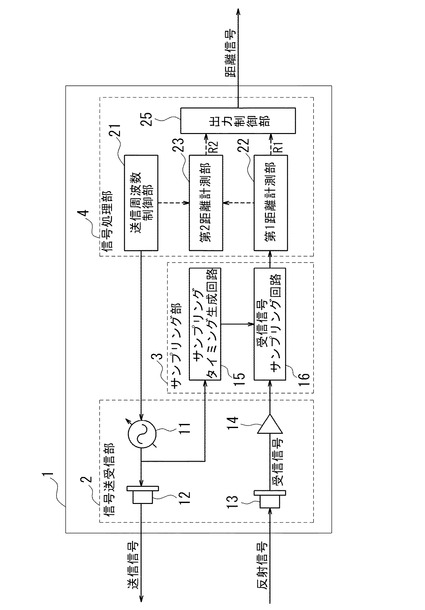
図1は、第1の実施例の構成を示す図である。
測距装置1は、信号送受信部2、サンプリング部3および信号処理部4とからなっている。
信号送受信部2は、周波数可変発振器11、この周波数可変発振器11からの発振信号に基づいて超音波の送信信号を出力する超音波発振素子12、超音波を受信して受信信号に変換する超音波受信素子13、および超音波受信素子13の受信信号を増幅する信号増幅器14を有する。
超音波発振素子12と超音波受信素子13は互いに平行に同一方向に向けて設置され、超音波発振素子12から照射された送信信号の対象物による反射信号が超音波受信素子13に受信されるようになっている。
【0009】
サンプリング部3は、周波数可変発振器11からの発振信号を入力して送信信号と同期したサンプリングタイミング信号(例えば送信信号と同一周波数の矩形波)を生成するサンプリングタイミング生成回路15と、上記サンプリングタイミング信号によるタイミングで信号増幅器14の出力(すなわち増幅された受信信号)をサンプリング検出してそのサンプリングデータを後述する周波数ステップごとに蓄積する受信信号サンプリング回路16を備える。
【0010】
つぎに信号処理部は、周波数可変発振器11に接続された送信周波数制御部21、受信信号サンプリング回路16に接続された第1距離計測部22、送信周波数制御部21と第1距離計測部22とに接続された第2距離計測部23、および第1距離計測部22と第2距離計測部23とに接続された出力制御部25を有する。
【0011】
送信周波数制御部21は、周波数可変発振器11の発振信号を制御することにより、超音波発振素子12から送出される送信信号の周波数を制御する。
第1距離計測部22は、受信信号サンプリング回路16から出力されるサンプリングデータの振幅変動の情報に基づいて、送信信号と受信信号間の遅延時間から対象物までの距離を算出する。
【0012】
第2距離計測部23は、第1距離計測部22で用いたサンプリングデータの固定振幅部分の振幅情報を周波数ステップごとに並べた振動波形の振動周波数(または振動周期)に基づいて対象物までの距離を算出する。
第1距離計測部22および第2距離計測部23で算出した対象物までの距離はそれぞれ出力制御部25へ入力される。出力制御部25は第1距離計測部22と第2距離計測部23から入力された2つの距離を基に所定の補完処理などを行い、測距装置としての最終的な距離信号を出力する。
【0013】
以下、本実施例における測距の動作について説明する。
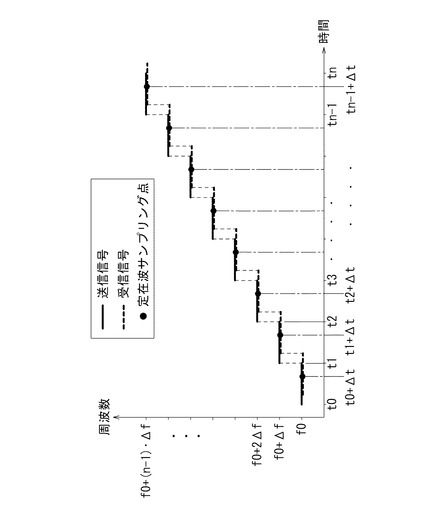
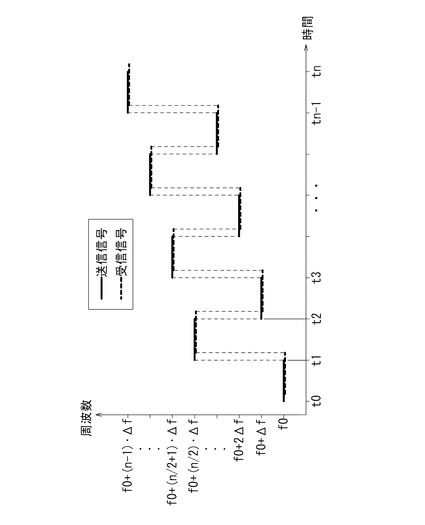
前述のように、送信周波数制御部21は、周波数可変発振器11を制御することにより、図2に示すように、超音波発振素子12から送出される送信信号の周波数を最小周波数f0からΔfの周波数差で順次にステップ状に変化させる。
図2には、ステップ状の送信信号と、その反射信号による受信信号を時系列に重ねて示している。受信信号は送信信号に対して空間伝播の遅延時間をもって、送信信号と同様にステップ状に現れる。
【0014】
受信信号サンプリング回路16では、送信信号の周波数変化点(t0、t1、t2、・・・)から所定の時間差Δtのタイミングで受信信号の定在波の振幅をサンプリングする。これにより、周波数変化に応じて定在波の振幅に位相変化が現れる。
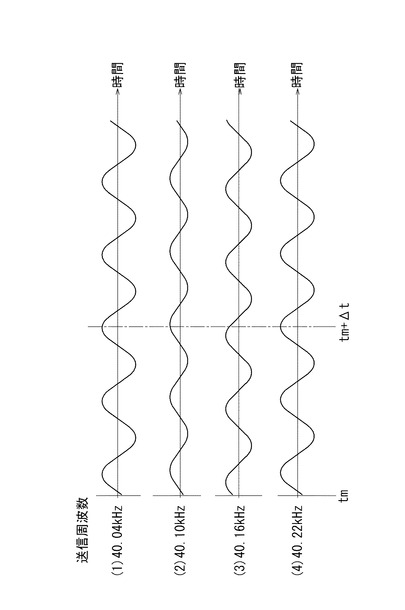
すなわち、図3は、対象物が距離1mの位置にあるとき、送信信号の周波数(送信周波数)を40.04kHzから0.06kHzずつ変化させた場合の定在波の振幅変動例を示す。なお、図3では下方向に周波数を増大させている。
周波数変化点の時刻tmから上述の時間差分後、すなわち時刻tm+Δtにおける振幅を見ると、周波数を変化させたことによって位相変化が発生していることがわかる。
【0015】
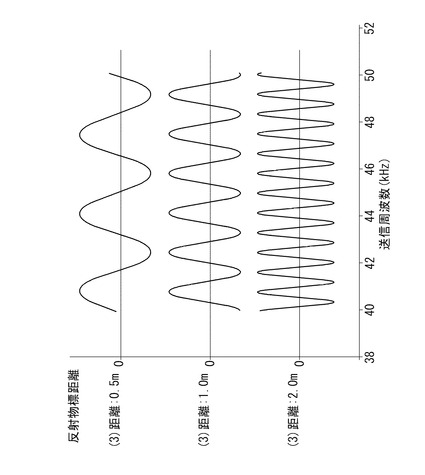
さらに図4は、対象物までの異なる距離に対して、送信信号の周波数を40kHzから50kHzまで変化させて、周波数変化点から時間差Δtの時点の振幅をサンプリングしたときの波形を示す。これから、反射する対象物までの距離が遠くなるにしたがってサンプリング波形の振動周波数が増している(周期が減じている)ことがわかる。
したがって、受信信号サンプリング回路16でサンプリングした受信信号の定在波の、周波数ステップごとの振幅変動の状況から距離を求めることができる。
【0016】
より詳細に説明すると、送信信号の周波数をf、受信信号の定在波の観測位置をx、振幅を1とすると、送信信号Stは一般的に式(1)で表される。
St(f,x)=exp(j・2πf・x/V) ・・・(1)
ここで、Vは伝播媒体を伝播する速度で、超音波の場合約340m/秒である。
距離d(m)の位置に対象物が存在し、その反射効率をγ、位相変化量をφ(ラジアン)とすると、反射信号Srは式(2)で表される。
Sr(f,x)=γ・exp(jφ)・exp(j・2πf・(2d−x)/V)
・・・(2)
【0017】
式(1)、(2)より、送信信号と受信信号の合成信号Aは式(3)のようになる。
A(f,x)=|St(f,x)+Sr(f,x)|
=|exp(j・2πf・x/V){1+γ・exp(j・2πf・(2d−x)/V+φ)}| ・・・(3)
合成信号のパワーPは式(4)のように表される。
P(f,x)={A(f,x)}2
=1+γ2+2γ・cos{2πf・2(d−x)/V+φ}
・・・(4)
【0018】
式(4)より、観測位置x=0(m)で観測したときの合成信号のパワーP(f,0)は、
P(f,0)=1+γ2+2γ・cos{2πf・2d/V+φ} ・・・(5)
となり、式(5)のP(f,0)は周波数fについて周期的であり、その周期はV/2dであることがわかる。
したがって、送信信号の周波数ごとに合成信号のパワーP(f,0)の位相変動周期(あるいは周波数)を観測することにより対象物までの距離dを算出することができる。
【0019】
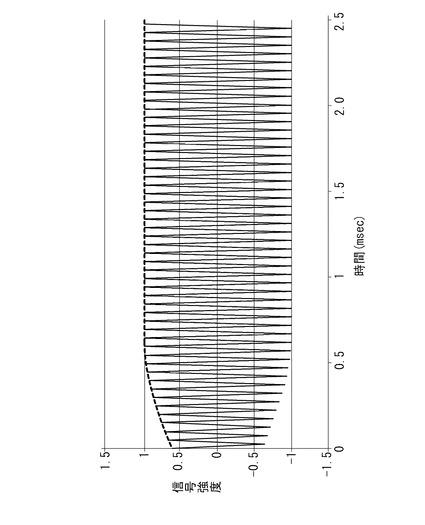
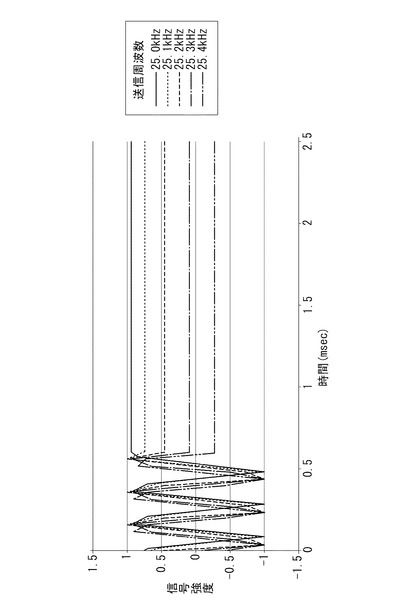
本実施例の受信信号サンプリング回路16では、図2における送信信号の1つの周波数ステップ、例えば時刻t1からt2の周波数ステップにおいて、その周波数f0+Δfの2逓倍周波数2・(f0+Δf)でサンプリングする。
ここで、受信信号はその空間伝播の遅延時間部分については周波数f0で観測され、それ以降は周波数f0+Δfで観測される。したがって、サンプリング波形は図5に実線で示すものとなり、遅延時間部分では周波数が異なることによって位相変化が生じ、振幅変動が起きる。なお、図5中破線は送信信号の周波数でサンプリングした場合を示す。
【0020】
第1距離計測部22では、この位相変化による振幅変動が発生している時間幅を計測して空間伝播遅延時間Δtとし、次式で対象物までの距離R1を算出する。
R1=V・Δt/2 ・・・(6)
第1距離計測部22は算出した距離R1を出力制御部25へ出力するとともに、空間伝播遅延時間Δtから後の振幅情報を第2距離計測部23へ出力する。
【0021】
第2距離計測部23は各式をもって詳述した位相変動周期に基づいて対象物までの距離を求める。
第2距離計測部23が第1距離計測部22から取得する振幅情報は、送信信号の周波数に応じて変化し、先の図5に示したサンプリング波形もその信号強度が周波数別に大きく変動する。
第2距離計測部23では、この振幅情報を周波数順に並べ替えて、図4に示したと同様な周波数ステップごとの振動波形を求め、式(5)のパワーPの位相変動周期から対象物までの距離R2を算出する。
【0022】
本実施例では、送信周波数制御部21、周波数可変発振器11および超音波発振素子12が発明における送信手段を構成し、超音波受信素子13および信号増幅器14が受信手段を構成している。
また、サンプリングタイミング生成回路15と受信信号サンプリング回路16からなるサンプリング部3が、サンプリング手段を構成している。
【0023】
本実施例は以上のように構成され、1つの周波数ステップの時間幅内で、送信信号に同期したサンプルタイミングで受信信号をサンプリングするものとし、第1距離計測部22では周波数ステップごとのサンプリング波形において振幅変動が発生している時間幅を空間伝播遅延時間として、この遅延時間と媒体の伝播速度とに基づいて距離R1を算出するから、いわゆるデータ更新周期が短く、高速に対象物までの距離が求められる。
一方、第2距離計測部23では同じサンプリング波形において振幅が変動していない部分での振幅情報を周波数順に並べた振動波形の振動周期(あるいは周波数)から距離R2を算出するから、従来の定在波を使用した測距と同じく高精度に対象物までの距離が求められる。
【0024】
したがって、出力制御部25は、第1、第2距離計測部22、23から高速ではあるが精度は少し低い距離R1と、高精度であるがデータ更新に時間がかかる距離R2とを取得するので、設定に応じて、速やかに距離R1を出力し、その後距離R2を出力することができ、あるいは距離R1とR2を相互補完した距離信号を出力することができる。
とくに補完については、距離R2をベースとする場合、第2距離計測部からの次の距離出力があるまでの間、距離R1を用いて距離変化を補うことにより、実質的にデータ更新周期を高速化することができる。
このため、伝播媒体として伝播速度の遅い超音波を用いたにもかかわらず、定在波測距による測定の高精度化と車載用としても十分な高速化とが共に達成される。
【0025】
なお、上記実施例では、送信信号の周波数を図2に示すように最小周波数f0からΔfの周波数差で順次に高くなっていくように変化させたが、変形例として、比較的大きな周波数差で高低を繰り返しながら上昇させることもできる。
図6はその一例を示し、これは、先の図2における時間軸の前半と後半を交互に並べたものに相当する。すなわち、周波数の全数がnであるとき、送信周波数制御部21は周波数可変発振器11を制御して、前半の最小周波数f0から中間周波数f0+((n/2)−1)・Δfまでの周波数ステップと、中間周波数f0+(n/2)・Δfから最大周波数f0+(n−1)・Δfまでの周波数ステップとを交互に設定して、時刻t0からt1の間は最小周波数f0、時刻t1からt2の間はf0+(n/2)・Δf、時刻t2からt3の間はf0+Δf、時刻t3からt4の間はf0+((n/2)+1)・Δf、時刻t4からt5の間はf0+2Δfのように、送信周波数を変化させる。
【0026】
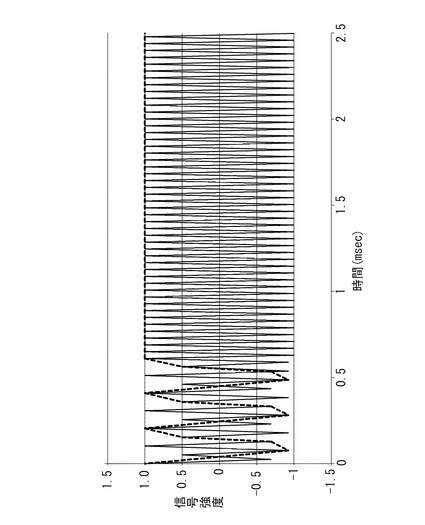
これによれば、例えば時刻t1からt2の周波数ステップにおける受信信号は、遅延時間部分では周波数f0で観測され、その後はf0+(n/2)・Δfで観測されるから、遅延時間部分の周波数差が(n/2)・Δfと大きくなり、図7に示すようにサンプリング波形における遅延時間部分の振幅変動がとくに顕著に現れる。なお、図中、実線は送信信号の周波数の2逓倍周波数でサンプリングし、破線は送信信号の周波数でサンプリングした場合を示している。
【0027】
送信信号の周波数が変化していくと、図8に示すように、その変化に応じてそれぞれのサンプリング波形の信号強度が周波数別に大きく変動する。
第2距離計測部23では、この振幅情報を周波数順に並べ替えて、周波数ステップごとの振動波形を観測する。
この変形例では、上述のようにサンプリング波形における遅延時間部分の振幅変動が顕著に現れるので、空間伝播遅延時間Δtをより一層精度よく観測でき、第1距離計測部22で算出する距離R1の精度が向上するという利点が得られる。
【0028】
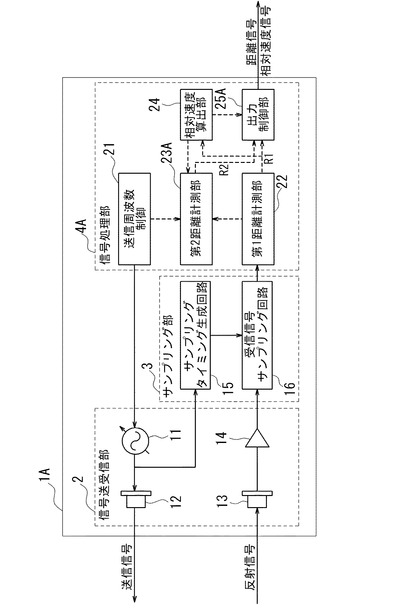
つぎに第2の実施例について説明する。
図9は第2の実施例の構成を示す。
測距装置1Aは、信号送受信部2、サンプリング部3および信号処理部4Aとからなっている。
信号処理部4Aには相対速度算出部24を含み、相対速度算出部24は第1距離計測部22、第2距離計測部23A、および出力制御部25Aにそれぞれ接続している。
相対速度算出部24は、第1距離計測部22の出力に基づいて対象物との相対速度を算出し、その結果を第2距離計測部23Aと出力制御部25Aへ出力する。第2距離計測部23Aと出力制御部25Aにおける処理は後述する。
その他の構成は第1の実施例と同じである。
【0029】
相対速度算出部24は、第1距離計測部22で算出された距離R1の周波数ステップごとの変化を観測して、対象物との相対速度を算出する。
距離R1の周波数ステップごとの変化は、周波数ステップが所定時間ごとに変化していくことから、時間経過における距離R1の変化であり、相対速度となる。
【0030】
第1の実施例では、相対速度がないものとして、送信信号と受信信号の合成信号のパワーを式(5)で表したが、対象物との間で相対速度があるときは、合成信号のパワーPは、相対速度をs、時刻tkにおける対象物までの距離をdkとして、時間のパラメータが入った次式で表される。
P(f,0,t)={A(f,0,t)}2
=1+γ2+2γ・cos{4πf・{dk
+s・(t−tk)}/V+φ} ・・・(7)
すなわち、観測に要する時間をTとすれば、合成信号のパワーの位相変動周期は、V/{2(d+s・T)}に一般化されるから、距離dを求めるのに相対速度sの情報を必要とする。
【0031】
そこで、本実施例の第2距離計測部23Aでは、相対速度算出部24で算出された相対速度sを式(7)に代入するとともに、第1距離計測部22からのサンプリング波形において振幅が変動していない部分での振幅情報を周波数順に並べた振動波形の振動周期(あるいは周波数)を観測することにより、距離R2を算出する。
出力制御部25Aは第1の実施例における出力制御部25と同様に距離R1とR2を相互補完などした距離信号を出力するとともに、相対速度算出部24から入力された相対速度も要求に応じて出力する。
【0032】
本実施例は以上のように構成され、相対速度算出部24により第1距離計測部22で得た距離R1の、周波数ステップごとの変化、すなわち時間経過に対する変化から相対速度sを求め、この相対速度を第2距離計測部23Aでの振動波形観測に用いる。このため、実際に相対速度があるにもかかわらず当該相対速度sの情報を欠くときに生じる「相対速度による誤差」を抑えることができる。
したがって、とくに走行路上の先行車など対象物との相対速度が始終変動する車両用として、有効である。
【0033】
なお、第1の実施例の変形例は第2の実施例にもそのまま適用可能である。
また、各実施例では信号媒体として超音波を用いたが、もちろんこれに限定されることなく、電磁波や赤外線等を含む光など任意に選択できる。
【図面の簡単な説明】
【0034】
【図1】第1の実施例の構成を示す図である。
【図2】送信信号と受信信号を示す図である。
【図3】送信周波数を変化させたときの定在波の振幅変動を示す図である。
【図4】送信周波数を変化させたときの、対象物との距離変化による振幅変動の周波数の変化を示す図である。
【図5】1つの周波数ステップにおけるサンプリング結果を示す図である。
【図6】変形例における送信信号と受信信号を示す図である。
【図7】変形例における1つの周波数ステップにおけるサンプリング結果を示す図である。
【図8】サンプリング波形の周波数ごとの変化を示す図である。
【図9】第2の実施例の構成を示す図である。
【符号の説明】
【0035】
1、1A 測距装置
2 信号送受信部
3 サンプリング部
4、4A 信号処理部
11 周波数可変発振器
12 超音波発振素子
13 超音波受信素子
14 信号増幅器
15 サンプリングタイミング生成回路
16 受信信号サンプリング回路
21 送信周波数制御部
22 第1距離計測部
23、23A 第2距離計測部
24 相対速度算出部
25、25A 出力制御部
【技術分野】
【0001】
本発明は、定在波の観測に基づいて対象物までの距離を測定する定在波測距装置に関する。
【背景技術】
【0002】
送信信号と対象物からの反射信号に基づいて対象物までの距離を測定するレーダとして、とくに定在波を用いて対象物までの距離を測定する測距装置が特開2002−357656号公報に開示されている。これは、送信信号の周波数をステップ状に周波数変調し、対象物からの反射信号により発生する定在波を送信周波数ごとに観測して、定在波間の位相の変化を検出することにより対象物までの距離を算出するものである。この方式は、送信信号送出から反射信号受信までの遅延時間に基づいて距離を算出する方式に比較して、近距離の距離測定においても高い精度が得られる。
ここで、上記公報に示された定在波による距離測定において、距離分解能と最大検知距離を両立させるためには、細かな周波数ステップで広い周波数範囲の周波数変調を行って、定在波の位相観測数を多くする必要がある。
【特許文献1】特開2002−357656号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、レーダに用いる伝播媒体としては電磁波、光、超音波などがあり、例えば車両周りの近傍検出などには簡便な超音波が多く使用されている。
しかし、伝播媒体に超音波を使用する場合には、その伝播速度が電磁波と比較した場合に6桁ほど小さいために、定在波の位相観測数を多くすると観測時間が長くなるという問題がある。
【0004】
また、対象物との間に相対速度が発生している場合には、距離測定値に誤差が含まれてくるので、さらに精度を高めようとするとき、例えば特開2004−325085公報には、周波数ステップの周波数差を異ならせた2つの定在波による測定を行って、上記誤差を補正する方法も提案されている。しかしこの方法では観測時間がさらに2倍必要になる。
以上のように、従来の定在波を使用した測距では高い精度は得られるが時間がかかるという問題を有している。
【0005】
したがって本発明は、上記の問題点にかんがみ、伝播媒体にかかわらず高精度かつ高速に対象物までの距離を測定可能とした定在波測距装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
このため本発明は、周波数をステップ状に変化させた送信信号を送出して、対象物の反射による受信信号の定在波を送信信号の周波数に同期したタイミングでサンプリングするようにし、第1の距離計測部で周波数ごとに上記サンプリングされた信号における振幅が変動する区間の時間幅に基づいて第1の距離値を算出するとともに、第2の距離計測部で上記サンプリングされた信号における振幅が変動する区間を除く領域の振幅情報を、送信信号の周波数ごとに並べて生成した振動波形の振動周期に基づいて第2の距離値を算出して、出力制御部から第1の距離値と第2の距離値とに基づいて対象物までの距離信号を出力するものとした。
【発明の効果】
【0007】
周波数ごとのサンプリング波形において振幅変動が発生している区間の時間幅は空間伝播遅延時間に対応するから、第1距離計測部ではこの遅延時間と媒体の伝播速度とに基づいて第1の距離値が高速に算出できる。
また、第2距離計測部23では振幅が変動していない部分での振幅情報を周波数順に並べた振動波形の振動周期から第2の距離値を算出するから、第2の距離値は従来の定在波を使用した測距によるものと同じく高精度である。
したがって、たとえ伝播速度の低い媒体を用いた場合でも、高速に得られる第1の距離値と高精度の第2の距離値を相互補完して対象物までの距離測定の高精度化と高速化とが両立できる。
【発明を実施するための最良の形態】
【0008】
次に、発明の実施の形態を実施例により説明する。
図1は、第1の実施例の構成を示す図である。
測距装置1は、信号送受信部2、サンプリング部3および信号処理部4とからなっている。
信号送受信部2は、周波数可変発振器11、この周波数可変発振器11からの発振信号に基づいて超音波の送信信号を出力する超音波発振素子12、超音波を受信して受信信号に変換する超音波受信素子13、および超音波受信素子13の受信信号を増幅する信号増幅器14を有する。
超音波発振素子12と超音波受信素子13は互いに平行に同一方向に向けて設置され、超音波発振素子12から照射された送信信号の対象物による反射信号が超音波受信素子13に受信されるようになっている。
【0009】
サンプリング部3は、周波数可変発振器11からの発振信号を入力して送信信号と同期したサンプリングタイミング信号(例えば送信信号と同一周波数の矩形波)を生成するサンプリングタイミング生成回路15と、上記サンプリングタイミング信号によるタイミングで信号増幅器14の出力(すなわち増幅された受信信号)をサンプリング検出してそのサンプリングデータを後述する周波数ステップごとに蓄積する受信信号サンプリング回路16を備える。
【0010】
つぎに信号処理部は、周波数可変発振器11に接続された送信周波数制御部21、受信信号サンプリング回路16に接続された第1距離計測部22、送信周波数制御部21と第1距離計測部22とに接続された第2距離計測部23、および第1距離計測部22と第2距離計測部23とに接続された出力制御部25を有する。
【0011】
送信周波数制御部21は、周波数可変発振器11の発振信号を制御することにより、超音波発振素子12から送出される送信信号の周波数を制御する。
第1距離計測部22は、受信信号サンプリング回路16から出力されるサンプリングデータの振幅変動の情報に基づいて、送信信号と受信信号間の遅延時間から対象物までの距離を算出する。
【0012】
第2距離計測部23は、第1距離計測部22で用いたサンプリングデータの固定振幅部分の振幅情報を周波数ステップごとに並べた振動波形の振動周波数(または振動周期)に基づいて対象物までの距離を算出する。
第1距離計測部22および第2距離計測部23で算出した対象物までの距離はそれぞれ出力制御部25へ入力される。出力制御部25は第1距離計測部22と第2距離計測部23から入力された2つの距離を基に所定の補完処理などを行い、測距装置としての最終的な距離信号を出力する。
【0013】
以下、本実施例における測距の動作について説明する。
前述のように、送信周波数制御部21は、周波数可変発振器11を制御することにより、図2に示すように、超音波発振素子12から送出される送信信号の周波数を最小周波数f0からΔfの周波数差で順次にステップ状に変化させる。
図2には、ステップ状の送信信号と、その反射信号による受信信号を時系列に重ねて示している。受信信号は送信信号に対して空間伝播の遅延時間をもって、送信信号と同様にステップ状に現れる。
【0014】
受信信号サンプリング回路16では、送信信号の周波数変化点(t0、t1、t2、・・・)から所定の時間差Δtのタイミングで受信信号の定在波の振幅をサンプリングする。これにより、周波数変化に応じて定在波の振幅に位相変化が現れる。
すなわち、図3は、対象物が距離1mの位置にあるとき、送信信号の周波数(送信周波数)を40.04kHzから0.06kHzずつ変化させた場合の定在波の振幅変動例を示す。なお、図3では下方向に周波数を増大させている。
周波数変化点の時刻tmから上述の時間差分後、すなわち時刻tm+Δtにおける振幅を見ると、周波数を変化させたことによって位相変化が発生していることがわかる。
【0015】
さらに図4は、対象物までの異なる距離に対して、送信信号の周波数を40kHzから50kHzまで変化させて、周波数変化点から時間差Δtの時点の振幅をサンプリングしたときの波形を示す。これから、反射する対象物までの距離が遠くなるにしたがってサンプリング波形の振動周波数が増している(周期が減じている)ことがわかる。
したがって、受信信号サンプリング回路16でサンプリングした受信信号の定在波の、周波数ステップごとの振幅変動の状況から距離を求めることができる。
【0016】
より詳細に説明すると、送信信号の周波数をf、受信信号の定在波の観測位置をx、振幅を1とすると、送信信号Stは一般的に式(1)で表される。
St(f,x)=exp(j・2πf・x/V) ・・・(1)
ここで、Vは伝播媒体を伝播する速度で、超音波の場合約340m/秒である。
距離d(m)の位置に対象物が存在し、その反射効率をγ、位相変化量をφ(ラジアン)とすると、反射信号Srは式(2)で表される。
Sr(f,x)=γ・exp(jφ)・exp(j・2πf・(2d−x)/V)
・・・(2)
【0017】
式(1)、(2)より、送信信号と受信信号の合成信号Aは式(3)のようになる。
A(f,x)=|St(f,x)+Sr(f,x)|
=|exp(j・2πf・x/V){1+γ・exp(j・2πf・(2d−x)/V+φ)}| ・・・(3)
合成信号のパワーPは式(4)のように表される。
P(f,x)={A(f,x)}2
=1+γ2+2γ・cos{2πf・2(d−x)/V+φ}
・・・(4)
【0018】
式(4)より、観測位置x=0(m)で観測したときの合成信号のパワーP(f,0)は、
P(f,0)=1+γ2+2γ・cos{2πf・2d/V+φ} ・・・(5)
となり、式(5)のP(f,0)は周波数fについて周期的であり、その周期はV/2dであることがわかる。
したがって、送信信号の周波数ごとに合成信号のパワーP(f,0)の位相変動周期(あるいは周波数)を観測することにより対象物までの距離dを算出することができる。
【0019】
本実施例の受信信号サンプリング回路16では、図2における送信信号の1つの周波数ステップ、例えば時刻t1からt2の周波数ステップにおいて、その周波数f0+Δfの2逓倍周波数2・(f0+Δf)でサンプリングする。
ここで、受信信号はその空間伝播の遅延時間部分については周波数f0で観測され、それ以降は周波数f0+Δfで観測される。したがって、サンプリング波形は図5に実線で示すものとなり、遅延時間部分では周波数が異なることによって位相変化が生じ、振幅変動が起きる。なお、図5中破線は送信信号の周波数でサンプリングした場合を示す。
【0020】
第1距離計測部22では、この位相変化による振幅変動が発生している時間幅を計測して空間伝播遅延時間Δtとし、次式で対象物までの距離R1を算出する。
R1=V・Δt/2 ・・・(6)
第1距離計測部22は算出した距離R1を出力制御部25へ出力するとともに、空間伝播遅延時間Δtから後の振幅情報を第2距離計測部23へ出力する。
【0021】
第2距離計測部23は各式をもって詳述した位相変動周期に基づいて対象物までの距離を求める。
第2距離計測部23が第1距離計測部22から取得する振幅情報は、送信信号の周波数に応じて変化し、先の図5に示したサンプリング波形もその信号強度が周波数別に大きく変動する。
第2距離計測部23では、この振幅情報を周波数順に並べ替えて、図4に示したと同様な周波数ステップごとの振動波形を求め、式(5)のパワーPの位相変動周期から対象物までの距離R2を算出する。
【0022】
本実施例では、送信周波数制御部21、周波数可変発振器11および超音波発振素子12が発明における送信手段を構成し、超音波受信素子13および信号増幅器14が受信手段を構成している。
また、サンプリングタイミング生成回路15と受信信号サンプリング回路16からなるサンプリング部3が、サンプリング手段を構成している。
【0023】
本実施例は以上のように構成され、1つの周波数ステップの時間幅内で、送信信号に同期したサンプルタイミングで受信信号をサンプリングするものとし、第1距離計測部22では周波数ステップごとのサンプリング波形において振幅変動が発生している時間幅を空間伝播遅延時間として、この遅延時間と媒体の伝播速度とに基づいて距離R1を算出するから、いわゆるデータ更新周期が短く、高速に対象物までの距離が求められる。
一方、第2距離計測部23では同じサンプリング波形において振幅が変動していない部分での振幅情報を周波数順に並べた振動波形の振動周期(あるいは周波数)から距離R2を算出するから、従来の定在波を使用した測距と同じく高精度に対象物までの距離が求められる。
【0024】
したがって、出力制御部25は、第1、第2距離計測部22、23から高速ではあるが精度は少し低い距離R1と、高精度であるがデータ更新に時間がかかる距離R2とを取得するので、設定に応じて、速やかに距離R1を出力し、その後距離R2を出力することができ、あるいは距離R1とR2を相互補完した距離信号を出力することができる。
とくに補完については、距離R2をベースとする場合、第2距離計測部からの次の距離出力があるまでの間、距離R1を用いて距離変化を補うことにより、実質的にデータ更新周期を高速化することができる。
このため、伝播媒体として伝播速度の遅い超音波を用いたにもかかわらず、定在波測距による測定の高精度化と車載用としても十分な高速化とが共に達成される。
【0025】
なお、上記実施例では、送信信号の周波数を図2に示すように最小周波数f0からΔfの周波数差で順次に高くなっていくように変化させたが、変形例として、比較的大きな周波数差で高低を繰り返しながら上昇させることもできる。
図6はその一例を示し、これは、先の図2における時間軸の前半と後半を交互に並べたものに相当する。すなわち、周波数の全数がnであるとき、送信周波数制御部21は周波数可変発振器11を制御して、前半の最小周波数f0から中間周波数f0+((n/2)−1)・Δfまでの周波数ステップと、中間周波数f0+(n/2)・Δfから最大周波数f0+(n−1)・Δfまでの周波数ステップとを交互に設定して、時刻t0からt1の間は最小周波数f0、時刻t1からt2の間はf0+(n/2)・Δf、時刻t2からt3の間はf0+Δf、時刻t3からt4の間はf0+((n/2)+1)・Δf、時刻t4からt5の間はf0+2Δfのように、送信周波数を変化させる。
【0026】
これによれば、例えば時刻t1からt2の周波数ステップにおける受信信号は、遅延時間部分では周波数f0で観測され、その後はf0+(n/2)・Δfで観測されるから、遅延時間部分の周波数差が(n/2)・Δfと大きくなり、図7に示すようにサンプリング波形における遅延時間部分の振幅変動がとくに顕著に現れる。なお、図中、実線は送信信号の周波数の2逓倍周波数でサンプリングし、破線は送信信号の周波数でサンプリングした場合を示している。
【0027】
送信信号の周波数が変化していくと、図8に示すように、その変化に応じてそれぞれのサンプリング波形の信号強度が周波数別に大きく変動する。
第2距離計測部23では、この振幅情報を周波数順に並べ替えて、周波数ステップごとの振動波形を観測する。
この変形例では、上述のようにサンプリング波形における遅延時間部分の振幅変動が顕著に現れるので、空間伝播遅延時間Δtをより一層精度よく観測でき、第1距離計測部22で算出する距離R1の精度が向上するという利点が得られる。
【0028】
つぎに第2の実施例について説明する。
図9は第2の実施例の構成を示す。
測距装置1Aは、信号送受信部2、サンプリング部3および信号処理部4Aとからなっている。
信号処理部4Aには相対速度算出部24を含み、相対速度算出部24は第1距離計測部22、第2距離計測部23A、および出力制御部25Aにそれぞれ接続している。
相対速度算出部24は、第1距離計測部22の出力に基づいて対象物との相対速度を算出し、その結果を第2距離計測部23Aと出力制御部25Aへ出力する。第2距離計測部23Aと出力制御部25Aにおける処理は後述する。
その他の構成は第1の実施例と同じである。
【0029】
相対速度算出部24は、第1距離計測部22で算出された距離R1の周波数ステップごとの変化を観測して、対象物との相対速度を算出する。
距離R1の周波数ステップごとの変化は、周波数ステップが所定時間ごとに変化していくことから、時間経過における距離R1の変化であり、相対速度となる。
【0030】
第1の実施例では、相対速度がないものとして、送信信号と受信信号の合成信号のパワーを式(5)で表したが、対象物との間で相対速度があるときは、合成信号のパワーPは、相対速度をs、時刻tkにおける対象物までの距離をdkとして、時間のパラメータが入った次式で表される。
P(f,0,t)={A(f,0,t)}2
=1+γ2+2γ・cos{4πf・{dk
+s・(t−tk)}/V+φ} ・・・(7)
すなわち、観測に要する時間をTとすれば、合成信号のパワーの位相変動周期は、V/{2(d+s・T)}に一般化されるから、距離dを求めるのに相対速度sの情報を必要とする。
【0031】
そこで、本実施例の第2距離計測部23Aでは、相対速度算出部24で算出された相対速度sを式(7)に代入するとともに、第1距離計測部22からのサンプリング波形において振幅が変動していない部分での振幅情報を周波数順に並べた振動波形の振動周期(あるいは周波数)を観測することにより、距離R2を算出する。
出力制御部25Aは第1の実施例における出力制御部25と同様に距離R1とR2を相互補完などした距離信号を出力するとともに、相対速度算出部24から入力された相対速度も要求に応じて出力する。
【0032】
本実施例は以上のように構成され、相対速度算出部24により第1距離計測部22で得た距離R1の、周波数ステップごとの変化、すなわち時間経過に対する変化から相対速度sを求め、この相対速度を第2距離計測部23Aでの振動波形観測に用いる。このため、実際に相対速度があるにもかかわらず当該相対速度sの情報を欠くときに生じる「相対速度による誤差」を抑えることができる。
したがって、とくに走行路上の先行車など対象物との相対速度が始終変動する車両用として、有効である。
【0033】
なお、第1の実施例の変形例は第2の実施例にもそのまま適用可能である。
また、各実施例では信号媒体として超音波を用いたが、もちろんこれに限定されることなく、電磁波や赤外線等を含む光など任意に選択できる。
【図面の簡単な説明】
【0034】
【図1】第1の実施例の構成を示す図である。
【図2】送信信号と受信信号を示す図である。
【図3】送信周波数を変化させたときの定在波の振幅変動を示す図である。
【図4】送信周波数を変化させたときの、対象物との距離変化による振幅変動の周波数の変化を示す図である。
【図5】1つの周波数ステップにおけるサンプリング結果を示す図である。
【図6】変形例における送信信号と受信信号を示す図である。
【図7】変形例における1つの周波数ステップにおけるサンプリング結果を示す図である。
【図8】サンプリング波形の周波数ごとの変化を示す図である。
【図9】第2の実施例の構成を示す図である。
【符号の説明】
【0035】
1、1A 測距装置
2 信号送受信部
3 サンプリング部
4、4A 信号処理部
11 周波数可変発振器
12 超音波発振素子
13 超音波受信素子
14 信号増幅器
15 サンプリングタイミング生成回路
16 受信信号サンプリング回路
21 送信周波数制御部
22 第1距離計測部
23、23A 第2距離計測部
24 相対速度算出部
25、25A 出力制御部
【特許請求の範囲】
【請求項1】
周波数をステップ状に変化させた送信信号を送出する送信手段と、
送信信号が対象物で反射した反射信号を検出してこれを受信信号として出力する受信手段と、
前記受信信号の定在波を前記送信信号の周波数に同期したタイミングでサンプリングするサンプリング手段と、
該サンプリング手段でサンプリングされた信号において、周波数ごとに振幅が変動する区間の時間幅に基づいて第1の距離値を算出する第1の距離計測部と、
前記サンプリングされた信号における前記振幅が変動する区間を除く領域の振幅情報を、前記送信信号の周波数ごとに並べて生成した振動波形の振動周期に基づいて第2の距離値を算出する第2の距離計測部と、
前記第1の距離計測部で算出した第1の距離値と前記第2の距離計測部で算出した第2の距離値とに基づいて、対象物までの距離信号を出力する出力制御部とを有することを特徴とする定在波測距装置。
【請求項2】
前記第1の距離計測部で算出された距離の周波数ステップごとの変化に基づいて、対象物の相対速度を算出する相対速度算出部を備え、
前記第2の距離計測部は、前記相対速度算出部で算出された相対速度を用いて、当該第2の距離計測部で算出する第2の距離値の相対速度による誤差を補正することを特徴とする請求項1記載の定在波測距装置。
【請求項3】
周波数をステップ状に変化させた送信信号を送出する送信手段と、
送信信号が対象物で反射した反射信号を検出してこれを受信信号として出力する受信手段と、
前記受信信号の定在波を前記送信信号の周波数に同期したタイミングでサンプリングするサンプリング手段と、
該サンプリング手段でサンプリングされた信号において、周波数ごとに振幅が変動する区間の時間幅に基づいて対象物までの距離を算出する距離計測部とからなることを特徴とする定在波測距装置。
【請求項4】
前記送信手段は、送信信号として、最小周波数から中間周波数までの周波数ステップと、中間周波数から最大周波数までの周波数ステップとを交互に送出することを特徴とする請求項1から3のいずれか1に記載の定在波測距装置。
【請求項5】
前記送信手段は超音波発振素子を備え、受信手段は超音波受信素子を備えて、前記送信信号の媒体を超音波としたことを特徴とする請求項1から4のいずれか1に記載の定在波測距装置。
【請求項6】
定在波測距装置における距離測定方法であって、
周波数をステップ状に変化させた送信信号を送出し、
受信信号の定在波を前記送信信号の周波数に同期したタイミングでサンプリングし、
サンプリングされた信号において、周波数ごとに振幅が変動する区間の時間幅に基づいて第1の距離値を算出するとともに、
前記サンプリングされた信号における前記振幅が変動する区間を除く領域の振幅情報を、前記送信信号の周波数ごとに並べて、その振動波形の振動周期に基づいて第2の距離値を算出して、
前記第1の距離値と前記第2の距離値とに基づいて、対象物までの距離信号を出力するようにしたことを特徴とする定在波測距装置における距離測定方法。
【請求項1】
周波数をステップ状に変化させた送信信号を送出する送信手段と、
送信信号が対象物で反射した反射信号を検出してこれを受信信号として出力する受信手段と、
前記受信信号の定在波を前記送信信号の周波数に同期したタイミングでサンプリングするサンプリング手段と、
該サンプリング手段でサンプリングされた信号において、周波数ごとに振幅が変動する区間の時間幅に基づいて第1の距離値を算出する第1の距離計測部と、
前記サンプリングされた信号における前記振幅が変動する区間を除く領域の振幅情報を、前記送信信号の周波数ごとに並べて生成した振動波形の振動周期に基づいて第2の距離値を算出する第2の距離計測部と、
前記第1の距離計測部で算出した第1の距離値と前記第2の距離計測部で算出した第2の距離値とに基づいて、対象物までの距離信号を出力する出力制御部とを有することを特徴とする定在波測距装置。
【請求項2】
前記第1の距離計測部で算出された距離の周波数ステップごとの変化に基づいて、対象物の相対速度を算出する相対速度算出部を備え、
前記第2の距離計測部は、前記相対速度算出部で算出された相対速度を用いて、当該第2の距離計測部で算出する第2の距離値の相対速度による誤差を補正することを特徴とする請求項1記載の定在波測距装置。
【請求項3】
周波数をステップ状に変化させた送信信号を送出する送信手段と、
送信信号が対象物で反射した反射信号を検出してこれを受信信号として出力する受信手段と、
前記受信信号の定在波を前記送信信号の周波数に同期したタイミングでサンプリングするサンプリング手段と、
該サンプリング手段でサンプリングされた信号において、周波数ごとに振幅が変動する区間の時間幅に基づいて対象物までの距離を算出する距離計測部とからなることを特徴とする定在波測距装置。
【請求項4】
前記送信手段は、送信信号として、最小周波数から中間周波数までの周波数ステップと、中間周波数から最大周波数までの周波数ステップとを交互に送出することを特徴とする請求項1から3のいずれか1に記載の定在波測距装置。
【請求項5】
前記送信手段は超音波発振素子を備え、受信手段は超音波受信素子を備えて、前記送信信号の媒体を超音波としたことを特徴とする請求項1から4のいずれか1に記載の定在波測距装置。
【請求項6】
定在波測距装置における距離測定方法であって、
周波数をステップ状に変化させた送信信号を送出し、
受信信号の定在波を前記送信信号の周波数に同期したタイミングでサンプリングし、
サンプリングされた信号において、周波数ごとに振幅が変動する区間の時間幅に基づいて第1の距離値を算出するとともに、
前記サンプリングされた信号における前記振幅が変動する区間を除く領域の振幅情報を、前記送信信号の周波数ごとに並べて、その振動波形の振動周期に基づいて第2の距離値を算出して、
前記第1の距離値と前記第2の距離値とに基づいて、対象物までの距離信号を出力するようにしたことを特徴とする定在波測距装置における距離測定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−17293(P2007−17293A)
【公開日】平成19年1月25日(2007.1.25)
【国際特許分類】
【出願番号】特願2005−199320(P2005−199320)
【出願日】平成17年7月7日(2005.7.7)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成19年1月25日(2007.1.25)
【国際特許分類】
【出願日】平成17年7月7日(2005.7.7)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]