
定速走行制御装置
【課題】定速走行制御装置では、手動運転における支援的な機能の場合、取り扱いによっては、手動運転と定速走行制御装置における自動制御を切り替える操作が発生するため、車両駆動制御装置の手動運転向けノッチ曲線を、ATO向けに切り替えずに用いて制御する必要がある。
【解決手段】定速走行制御装置において、目標速度204を複数の速度帯304に分割し、車両駆動制御装置の各ノッチの速度−引張力曲線301と、走行抵抗曲線302の交点303に基づいてそれらの速度帯304を設定し、その速度帯1〜5ごとにノッチを算出する制御計算を設定して制御に用いることで、目標速度204に追随して一定の速度で走行できる。
【解決手段】定速走行制御装置において、目標速度204を複数の速度帯304に分割し、車両駆動制御装置の各ノッチの速度−引張力曲線301と、走行抵抗曲線302の交点303に基づいてそれらの速度帯304を設定し、その速度帯1〜5ごとにノッチを算出する制御計算を設定して制御に用いることで、目標速度204に追随して一定の速度で走行できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、列車を定速で走行する制御を行う制御装置に関わる。
【背景技術】
【0002】
一般に、駅間の運転時間は、ATCによる制限速度信号がある場合、この制限速度を下回る速度で計画されるため、自動列車運転装置(ATO)では、出発時より、定速で制御する際の目標の速度を、制限速度をある速度下回る速度とし、勾配や制限速度の情報を考慮して、次駅まで制限速度を超過しない速度範囲で列車を定速で走行させる制御を行っている。
【0003】
一方、通過列車や追い抜きがある場合や、運転最高速度が異なる列車が同一軌道にある場合など、複雑な運転形態の鉄道においては、基本的な駅間の運転時間は、制限速度をある程度下回る速度で計画されるが、列車によっては、先行列車との間隔の確保に伴う、重畳的な速度低下の防止を図るため、特定の地点であえて制限速度をさらに低下させ、速度を一層抑制して走行させる計画とする場合がある。
【0004】
このような列車では、この運転計画に基づいて、より抑制した速度で走行するため、運転の自動化を図る場合には、列車や運転条件に従って定速で制御する際に、制限速度の変化に対応して、任意の目標の速度を選択する必要がある。
【0005】
車両駆動制御装置では、運転台からの指令に定速段を設けて、定速段を扱った任意の速度を定速となるようにモータの制御を行うシステムがすでに存在するが、制御段階や区分をこまめに切り換える必要がある勾配や制限速度信号による複雑な制御は、自動列車運転装置(ATO)などの定速走行制御との組合せによっている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開昭54−155511号公報
【特許文献2】特開平5−328539号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
定速運転を行う際に、設定した目標速度−列車速度の速度差を求め、例えば比例制御を用いて、速度差を最小とするようなノッチ指令を算出し、車両駆動制御装置に対して出力を行う。
【0008】
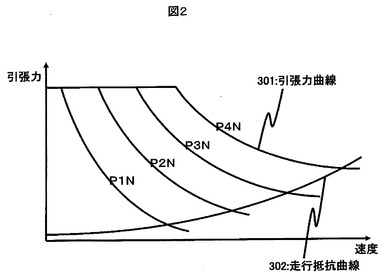
車両駆動制御装置の速度−引張力曲線は、手動運転で走行する場合、インバータ制御装置であっても、これまでの抵抗制御の特性に近い取り扱いとなるよう、例えば図2のように設定されている。
【0009】
一方、ATOによる定速走行の場合、車両駆動制御装置の速度−引張力曲線は、例えば制御方法の一つである比例制御に合うように、引張力をノッチ数で等分割した特性とし、目標速度から列車速度を引いた速度差が大きくなるに従って比例した加減速度が得られる設定としている。
【0010】
定速走行制御装置では、手動運転における支援的な機能の場合、取り扱いによっては、手動運転と定速走行制御装置における自動制御を切り替える操作が発生するため、車両駆動制御装置の手動運転向け速度−引張力曲線を、ATO向けに切り替えずに用いて制御する必要がある。
【0011】
しかし、先に述べたように、手動運転向け速度−引張力曲線は抵抗制御の特性に合わせてあるため、ノッチに対応する引張力を比例のような単純な制御式では求められない。
【0012】
本発明の目的は、車両駆動制御装置が手動運転向け速度−引張力曲線のとき、定速走行制御装置が目標速度に合った走行をするためのノッチを出力することである。
【課題を解決するための手段】
【0013】
本発明の定速走行制御装置は、受信した制限速度信号に基づいて、これを下回る目標速度で走行するノッチ指令を車両駆動制御装置に出力し、前記目標速度を複数の速度帯に分割し、その速度帯ごとにノッチを算出する制御計算を設定して制御に用いることを特徴とする。
【0014】
本発明の定速走行制御装置は、更に、前記目標速度の速度帯を、前記車両駆動制御装置の各ノッチの速度−引張力曲線と、走行抵抗曲線の交点に基づいて速度帯を設定することを特徴とする。
【0015】
本発明の定速走行制御装置では、車両駆動制御装置が手動運転向けノッチ特性のとき、走行抵抗と、各ノッチの引張力の交点を求め、現在の目標速度に一番近い点のノッチで目標速度に追随するノッチ特性を選択することで、目標速度に追随して一定の速度で走行できる。
【発明の効果】
【0016】
本発明によれば、車両駆動制御装置のノッチ特性を手動運転向けのまま、各速度帯において目標速度に追随する一定速度制御を行うことができる。
【図面の簡単な説明】
【0017】
【図1】図1は定速走行制御装置の全体構成図である。
【図2】図2は手動運転における速度−引張力曲線である。
【図3】図3は目標速度の速度帯の設定例である。
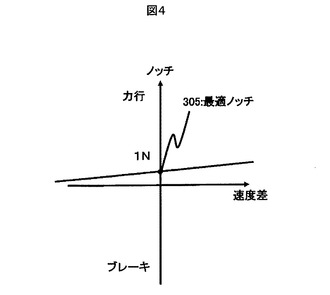
【図4】図4は図3の速度帯2における制御設定の例である。
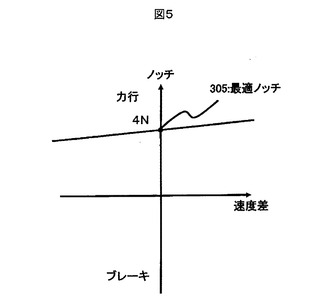
【図5】図5は図3の速度帯5における制御設定の例である。
【発明を実施するための形態】
【0018】
以下、本発明の実施例について図を用いて説明する。
【実施例1】
【0019】
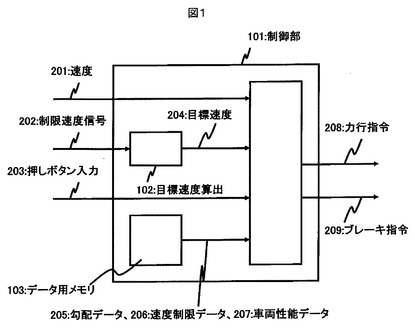
図1は、定速走行制御装置の全体構成図である。定速走行制御装置は、制限速度信号、車両の走行速度の入力、押しボタンなどによる制御の開始を指示する入力、入力情報により定速で走行する出力を算出する制御部、および定速で走行する指令を車両駆動制御装置への出力により構成される。
【0020】
定速走行制御装置は、制限速度信号202をある程度下回る速度を目標速度204とし、押しボタン入力203により押しボタンが扱われることにより、速度201が目標速度204に追随するように計算を行い、力行指令208、ブレーキ指令209の出力を行う。
【0021】
本発明の定速走行制御装置において、車両駆動制御装置の速度−引張力曲線301に手動運転における特性を用いた場合の実施例を図2に示す。
【0022】
手動運転向けの速度−引張力曲線301では、定速走行制御装置からのノッチ指令でも、従来の抵抗制御による走行制御を行うことになる。
【0023】
この場合、定速走行運転においては、まず、制御部101は、制限速度信号202より目標速度算出102を行い、目標速度204を決定する。
【0024】
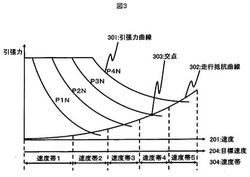
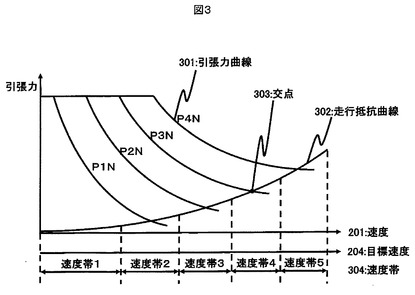
次に、図3に示すように、速度−引張力曲線上に、引張力曲線301と走行抵抗曲線302との交点303を求める。
【0025】
次に、目標速度204毎に制御区分の速度帯304を設定する。速度帯304の設定は、各交点303の中間点を速度帯304の切換点とし、例えば2ノッチにおける速度帯は1ノッチの交点と2ノッチの交点との中間点から、2ノッチの交点と3ノッチの交点との中間点とし、速度帯3とする。
【0026】
次に、各目標速度の速度帯304毎に、引張力曲線301と走行抵抗曲線302との交点303が含まれる引張力曲線301のノッチを最適ノッチ305とする。
【0027】
例えば、図4に示すように、速度帯2における比例制御では、速度差ゼロ点における最適ノッチ305は1ノッチとなるため、これにより制御設定を行う。
【0028】
また、例えば、図5に示すように、速度帯5における比例制御では、速度差ゼロ点における最適ノッチ305は4ノッチとなるため、これにより制御設定を行う。
【0029】
このようにすれば、車両駆動制御装置の速度−引張力曲線に、手動運転における特性を用いた場合でも、目標速度に追随して一定の速度で走行できる。
【0030】
なお、手動介入があった場合は、定速走行制御装置による目標速度への追随を終了し、引き続き手動速度−引張力曲線に応じた車両制御となる。
【符号の説明】
【0031】
101 制御部
102 目標速度算出
103 データ用メモリ
104 目標速度設定部
201 速度
202 制限速度信号
203 押しボタン入力
204 目標速度
205 勾配データ
206 速度制限データ
207 車両性能データ
208 力行指令
209 ブレーキ指令
301 引張力曲線
302 走行抵抗曲線
303 交点
304 速度帯
305 最適ノッチ
【技術分野】
【0001】
本発明は、列車を定速で走行する制御を行う制御装置に関わる。
【背景技術】
【0002】
一般に、駅間の運転時間は、ATCによる制限速度信号がある場合、この制限速度を下回る速度で計画されるため、自動列車運転装置(ATO)では、出発時より、定速で制御する際の目標の速度を、制限速度をある速度下回る速度とし、勾配や制限速度の情報を考慮して、次駅まで制限速度を超過しない速度範囲で列車を定速で走行させる制御を行っている。
【0003】
一方、通過列車や追い抜きがある場合や、運転最高速度が異なる列車が同一軌道にある場合など、複雑な運転形態の鉄道においては、基本的な駅間の運転時間は、制限速度をある程度下回る速度で計画されるが、列車によっては、先行列車との間隔の確保に伴う、重畳的な速度低下の防止を図るため、特定の地点であえて制限速度をさらに低下させ、速度を一層抑制して走行させる計画とする場合がある。
【0004】
このような列車では、この運転計画に基づいて、より抑制した速度で走行するため、運転の自動化を図る場合には、列車や運転条件に従って定速で制御する際に、制限速度の変化に対応して、任意の目標の速度を選択する必要がある。
【0005】
車両駆動制御装置では、運転台からの指令に定速段を設けて、定速段を扱った任意の速度を定速となるようにモータの制御を行うシステムがすでに存在するが、制御段階や区分をこまめに切り換える必要がある勾配や制限速度信号による複雑な制御は、自動列車運転装置(ATO)などの定速走行制御との組合せによっている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開昭54−155511号公報
【特許文献2】特開平5−328539号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
定速運転を行う際に、設定した目標速度−列車速度の速度差を求め、例えば比例制御を用いて、速度差を最小とするようなノッチ指令を算出し、車両駆動制御装置に対して出力を行う。
【0008】
車両駆動制御装置の速度−引張力曲線は、手動運転で走行する場合、インバータ制御装置であっても、これまでの抵抗制御の特性に近い取り扱いとなるよう、例えば図2のように設定されている。
【0009】
一方、ATOによる定速走行の場合、車両駆動制御装置の速度−引張力曲線は、例えば制御方法の一つである比例制御に合うように、引張力をノッチ数で等分割した特性とし、目標速度から列車速度を引いた速度差が大きくなるに従って比例した加減速度が得られる設定としている。
【0010】
定速走行制御装置では、手動運転における支援的な機能の場合、取り扱いによっては、手動運転と定速走行制御装置における自動制御を切り替える操作が発生するため、車両駆動制御装置の手動運転向け速度−引張力曲線を、ATO向けに切り替えずに用いて制御する必要がある。
【0011】
しかし、先に述べたように、手動運転向け速度−引張力曲線は抵抗制御の特性に合わせてあるため、ノッチに対応する引張力を比例のような単純な制御式では求められない。
【0012】
本発明の目的は、車両駆動制御装置が手動運転向け速度−引張力曲線のとき、定速走行制御装置が目標速度に合った走行をするためのノッチを出力することである。
【課題を解決するための手段】
【0013】
本発明の定速走行制御装置は、受信した制限速度信号に基づいて、これを下回る目標速度で走行するノッチ指令を車両駆動制御装置に出力し、前記目標速度を複数の速度帯に分割し、その速度帯ごとにノッチを算出する制御計算を設定して制御に用いることを特徴とする。
【0014】
本発明の定速走行制御装置は、更に、前記目標速度の速度帯を、前記車両駆動制御装置の各ノッチの速度−引張力曲線と、走行抵抗曲線の交点に基づいて速度帯を設定することを特徴とする。
【0015】
本発明の定速走行制御装置では、車両駆動制御装置が手動運転向けノッチ特性のとき、走行抵抗と、各ノッチの引張力の交点を求め、現在の目標速度に一番近い点のノッチで目標速度に追随するノッチ特性を選択することで、目標速度に追随して一定の速度で走行できる。
【発明の効果】
【0016】
本発明によれば、車両駆動制御装置のノッチ特性を手動運転向けのまま、各速度帯において目標速度に追随する一定速度制御を行うことができる。
【図面の簡単な説明】
【0017】
【図1】図1は定速走行制御装置の全体構成図である。
【図2】図2は手動運転における速度−引張力曲線である。
【図3】図3は目標速度の速度帯の設定例である。
【図4】図4は図3の速度帯2における制御設定の例である。
【図5】図5は図3の速度帯5における制御設定の例である。
【発明を実施するための形態】
【0018】
以下、本発明の実施例について図を用いて説明する。
【実施例1】
【0019】
図1は、定速走行制御装置の全体構成図である。定速走行制御装置は、制限速度信号、車両の走行速度の入力、押しボタンなどによる制御の開始を指示する入力、入力情報により定速で走行する出力を算出する制御部、および定速で走行する指令を車両駆動制御装置への出力により構成される。
【0020】
定速走行制御装置は、制限速度信号202をある程度下回る速度を目標速度204とし、押しボタン入力203により押しボタンが扱われることにより、速度201が目標速度204に追随するように計算を行い、力行指令208、ブレーキ指令209の出力を行う。
【0021】
本発明の定速走行制御装置において、車両駆動制御装置の速度−引張力曲線301に手動運転における特性を用いた場合の実施例を図2に示す。
【0022】
手動運転向けの速度−引張力曲線301では、定速走行制御装置からのノッチ指令でも、従来の抵抗制御による走行制御を行うことになる。
【0023】
この場合、定速走行運転においては、まず、制御部101は、制限速度信号202より目標速度算出102を行い、目標速度204を決定する。
【0024】
次に、図3に示すように、速度−引張力曲線上に、引張力曲線301と走行抵抗曲線302との交点303を求める。
【0025】
次に、目標速度204毎に制御区分の速度帯304を設定する。速度帯304の設定は、各交点303の中間点を速度帯304の切換点とし、例えば2ノッチにおける速度帯は1ノッチの交点と2ノッチの交点との中間点から、2ノッチの交点と3ノッチの交点との中間点とし、速度帯3とする。
【0026】
次に、各目標速度の速度帯304毎に、引張力曲線301と走行抵抗曲線302との交点303が含まれる引張力曲線301のノッチを最適ノッチ305とする。
【0027】
例えば、図4に示すように、速度帯2における比例制御では、速度差ゼロ点における最適ノッチ305は1ノッチとなるため、これにより制御設定を行う。
【0028】
また、例えば、図5に示すように、速度帯5における比例制御では、速度差ゼロ点における最適ノッチ305は4ノッチとなるため、これにより制御設定を行う。
【0029】
このようにすれば、車両駆動制御装置の速度−引張力曲線に、手動運転における特性を用いた場合でも、目標速度に追随して一定の速度で走行できる。
【0030】
なお、手動介入があった場合は、定速走行制御装置による目標速度への追随を終了し、引き続き手動速度−引張力曲線に応じた車両制御となる。
【符号の説明】
【0031】
101 制御部
102 目標速度算出
103 データ用メモリ
104 目標速度設定部
201 速度
202 制限速度信号
203 押しボタン入力
204 目標速度
205 勾配データ
206 速度制限データ
207 車両性能データ
208 力行指令
209 ブレーキ指令
301 引張力曲線
302 走行抵抗曲線
303 交点
304 速度帯
305 最適ノッチ
【特許請求の範囲】
【請求項1】
受信した制限速度信号に基づいて、これを下回る目標速度で走行するノッチ指令を車両駆動制御装置に出力する定速走行制御装置において、
前記目標速度を複数の速度帯に分割し、その速度帯ごとにノッチを算出する制御計算を設定して制御に用いることを特徴とする定速走行制御装置。
【請求項2】
前記目標速度の速度帯を、前記車両駆動制御装置の各ノッチの速度−引張力曲線と、走行抵抗曲線の交点に基づいて速度帯を設定することを特徴とする請求項1記載の定速走行制御装置。
【請求項1】
受信した制限速度信号に基づいて、これを下回る目標速度で走行するノッチ指令を車両駆動制御装置に出力する定速走行制御装置において、
前記目標速度を複数の速度帯に分割し、その速度帯ごとにノッチを算出する制御計算を設定して制御に用いることを特徴とする定速走行制御装置。
【請求項2】
前記目標速度の速度帯を、前記車両駆動制御装置の各ノッチの速度−引張力曲線と、走行抵抗曲線の交点に基づいて速度帯を設定することを特徴とする請求項1記載の定速走行制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−90371(P2012−90371A)
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願番号】特願2010−232684(P2010−232684)
【出願日】平成22年10月15日(2010.10.15)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願日】平成22年10月15日(2010.10.15)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]