
定重量充填装置
【課題】目標重量値に対して高精度の充填作業が可能な定重量充填装置を提供する。
【解決手段】多量供給A、少量供給B、供給停止Cの三段階に切替え可能のシャッター2下方に計量器4を配設し、該計量器4があらかじめ設定した目標重量値Mよりも若干軽い予備重量値Yを計量することで、前記シャッター2を少量供給Bに切替え制御する定重量充填装置において、該シャッター2が多量供給Aから少量供給Bに切替えられた時点から、前記計量器4の計量する重量増加量Fが変化する時までの時間tを検出し、この検出時間tにより落下中にある供給物3量を演算しシャッター2の供給停止C時期を決定してなる定重量充填装置の構成とする。
【解決手段】多量供給A、少量供給B、供給停止Cの三段階に切替え可能のシャッター2下方に計量器4を配設し、該計量器4があらかじめ設定した目標重量値Mよりも若干軽い予備重量値Yを計量することで、前記シャッター2を少量供給Bに切替え制御する定重量充填装置において、該シャッター2が多量供給Aから少量供給Bに切替えられた時点から、前記計量器4の計量する重量増加量Fが変化する時までの時間tを検出し、この検出時間tにより落下中にある供給物3量を演算しシャッター2の供給停止C時期を決定してなる定重量充填装置の構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、供給装置から連続して供給される粒状物や流体等の供給物を所定量に計量充填する定重量充填装置に関し、詳しくは、精度の良い定重量の充填が可能な定重量充填装置に関するものである。
【背景技術】
【0002】
特許文献1には、多量供給(大投入)段階での粉粒体の落下時間を計測し、この落下時間に少量供給(小投入)段階の粉粒体流量をかけて演算することにより、高精度の定量充填を行う技術が記載されている。
【特許文献1】特開平10−24901号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
特許文献1の技術は、シャッターが開くと落下時間計測タイマーが起動し、下方のロードセルが供給物の重量を検出した時、前記落下時間計測タイマーを停止させる。すなわちシャッターの高さから供給物が容器の底面に落下するまでの時間を計測するものである。容器への充填の場合、供給物の投入開始時と充填終了時とではシャッターから落下する供給物の落下距離もその落下中の供給物の量も異なるため、シャッターから容器底面までの供給物落下時間に基づいて演算しても誤差が大きく、更に高精度の定重量充填が望まれていた。
本発明は、目標重量値に対して更に高精度の充填が可能な定重量充填装置を提供することを課題とする。
【課題を解決するための手段】
【0004】
供給装置1下方に、少なくとも多量供給Aと少量供給B、及び、供給停止Cの三段階に切替え可能のシャッター2を設け、その下方には供給物3を受けて重量を計量する計量器4を配設し、該計量器4があらかじめ設定した目標重量値Mよりも若干軽い予備重量値Yを計量することで、前記シャッター2を少量供給Bに切替え制御する定重量充填装置において、該シャッター2を多量供給Aから少量供給Bに切替えた時点から、前記計量器4の計量する重量増加量Fが変化する時までの時間tを検出し、この検出時間tにより落下中にある供給物3量を演算し、シャッター2の供給停止C時期を決定してなる定重量充填装置の構成とする。
【発明の効果】
【0005】
供給装置1下方に、少なくとも多量供給Aと少量供給B、及び、供給停止Cの三段階に切替え可能のシャッター2を設け、その下方には供給物3を受けて重量を計量する計量器4を配設し、該計量器4があらかじめ設定した目標重量値Mよりも若干軽い予備重量値Yを計量することで、前記シャッター2を少量供給Bに切替え制御する定重量充填装置において、該シャッター2を多量供給Aから少量供給Bに切替えた時点から、前記計量器4の計量する重量増加量Fが変化する時までの時間tを検出するので、シャッター2から容器内に充填された供給物3の上端までの間を落下する落下時間tを正確に計測することができる。又、目標重量値Mよりも若干軽い予備重量値Yが計量された時点、すなわち、目標重量値Mに近い重量となった時点で、実際に落下中の供給物3の落下時間tに基づいて、シャッター2の供給停止C時期を決定するので、高精度の定重量充填を行うことが可能である。
【発明を実施するための最良の形態】
【0006】
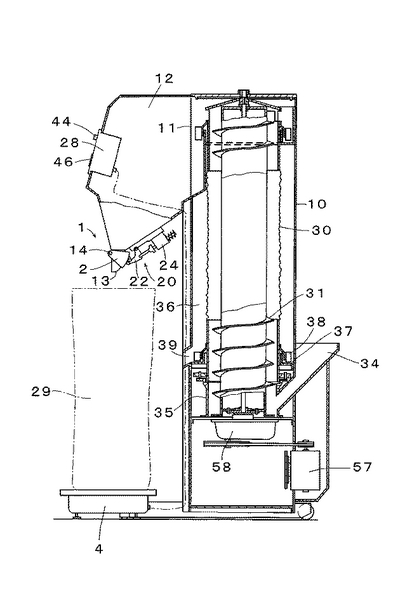
次に、穀粒の選別計量袋詰めを行う縦型穀粒選別機に本発明装置を実施した形態について説明する。選別機本体は、立設する穀体10内に円筒状の選別筒30と該選別筒30内方に収納される揚穀用のラセン体31を同軸状に立設するとともに、下部のモータ57及びギヤボックス58により互いに逆方向に駆動回転可能に構成してある。
34は供給ホッパーであり、選別筒30下部の受粒筒35内へ籾摺後の玄米を供給可能であり、供給された玄米はラセン体31の回転によって選別筒30内を揚穀されながら選別され、屑粒は網目から選別域36へ放出され整粒は選別筒30上端部の整粒出口11から放出するよう構成してある。37は上下の仕切板であって屑粒を受けるとともに、選別筒30外周に固着される回転掻出羽根38により屑粒を取出口39から放出することができる。
【0007】
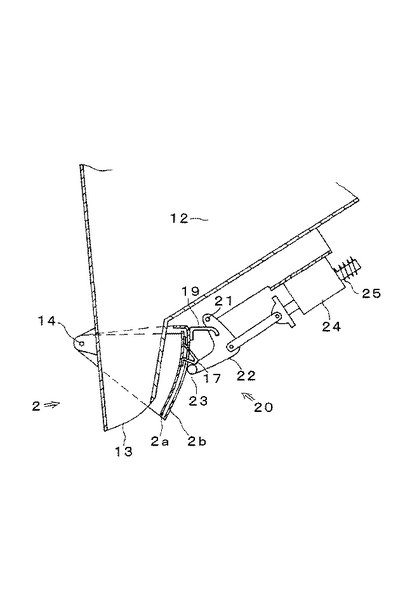
穀体10の上部には、整粒出口11に連通する貯留タンク12を前方へ突設してある。該貯留タンク12下方の供給口13にはシャッター2を設け、供給装置1を構成してある。
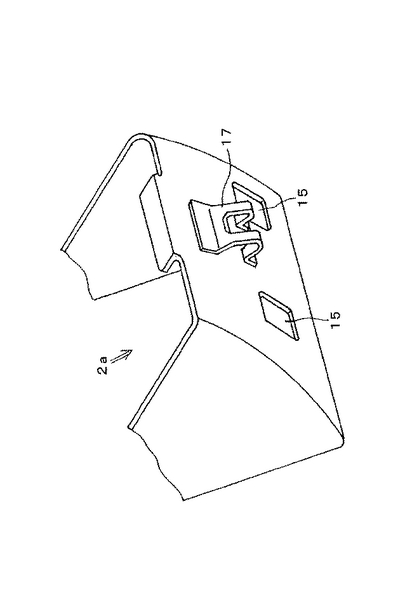
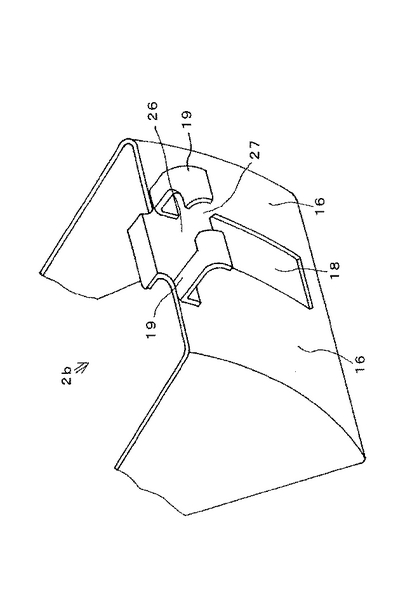
該シャッター2は軸14を中心に回動自在の内外二枚のシャッター2a,2bにより構成されており、内シャッター2aには供給口13の数分の一の大きさの少量口15を開設し、外シャッター2bは該少量口15を閉鎖可能な閉鎖部16を有してある。
内シャッター2a上部背面には、後方へ突出する係止部17を、又、外シャッター2bには、該係止部17が移動可能な開口部18と、係止部19とを設けてある。該係止部19には、後述の係止体23の通過を許容する広幅開口部26を基部に又、係止体23の通過を阻止し揺動板22の通過を許容する細幅開口部27を先端に形成してある。
【0008】
係止具20は、軸21に回動自在に枢支される逆くの字型の揺動板22と、該揺動板22一端に取着され両側に突出する係止体23とから構成されるとともに、揺動板22中央にソレノイド24を枢支連結し、該ソレノイド24への通電による吸着作用で前記揺動板22を引き、又、通電を断つことでスプリング25の弾発作用で揺動板22を押し出すよう構成してある。
【0009】
従って、穀粒の供給開始時にはソレノイド24を非通電状態で、内、外のシャッター2a,2bを上方に回動させると係止部19が係止体23に接当し揺動板22を軸21を中心にソレノイド24方向へ回動させ、該係止部19及び17を係止体23を越えて係合させ、供給口13を全開の多量供給A状態に切替える。
この状態からソレノイド24に通電すると、揺動板22が軸21を中心に引かれ係止体23による係止部17の係合が解除され内シャッター2aが供給口13をその少量口15を除いて回動閉鎖し少量供給B状態となる。又、この時外シャッター2bは係止部19の細幅開口部27両側を係止体23に係止されて保持される。
【0010】
次に、ソレノイド24を非通電状態にすると、揺動板22がスプリング25の弾発作用によって軸21を中心に押出され、係止体23が外シャッター2bの細幅開口部27から広幅開口部26へ移動しその係合を解除して、外シャッター2bは軸14を中心に回動し内シャッター2aの少量口15を閉鎖し供給停止C状態となる。
供給装置1下方にはロードセル方式の計量器4を設置し、該計量器4の計量信号は貯留タンク12前面の操作制御ボックス28からソレノイド24へ出力可能に結線されている。計量器4上面には穀粒袋29を載置し、供給口13から落下する穀粒の袋詰め作業を行うものである。
【0011】
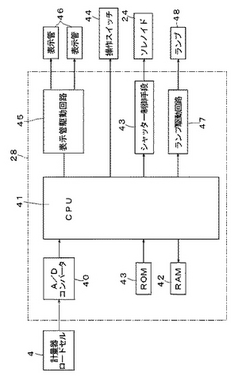
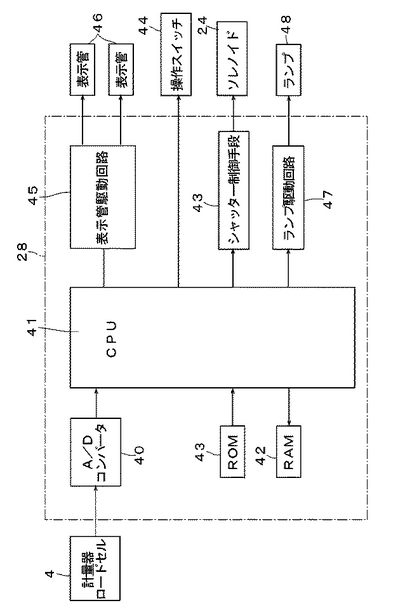
図1は、制御回路のブロック図であり、計量器4の計量信号は操作制御ボックス28内へ入力され、A/Dコンバーター40によりA/D変換され、CPU41に入力される。この入力信号はRAM42によって設定指示される目標重量値Mとこの目標重量値Mより若干軽い予備重量値Yと比較演算されソレノイド24を作動させるシャッター制御手段43へ出力すべく構成してある。該シャッター制御手段43はタイマーカウンターを有し、時間検出が可能である。43はROM、44は操作スイッチ、45は表示管駆動回路、46は表示管であり、計量状態を表示する。又、47はランプ駆動回路であり、計量終了時にランプ48を点滅させる。
【0012】
表示管46は計量状態を表示する以外に、計量完了までの残り時間も表示するよう構成してある。この残り時間の表示は、計量途中にある穀粒の質量Pと流量Wから算出することができる。
計量器4に穀粒袋29のみを載せた状態、すなわち計量開始前の状態の質量をP0とすると、所定の質量P1までに要した時間をT1とし、この時の流量をW1とすると、W1=(P1−P0)/T1となり、目標重量値Mに充填されるまでの残り時間X1は、X1=(M−P1)/W1となる。
次に、上記所定質量P1の状態から所定質量P2になるまでに要した時間をT2とし、この時の流量をW2とすると、W2=(P2−P1)/T2となり、目標重量値Mに充填されるまでの残り時間X2はX2=(M−P2)/W2となる。
このように、計量中にはP1,P2,P3・・・の順に、計量完了までに数回の測定を行い、残り時間の表示は、最も新しいその区間の流量Wを用いて、計量完了に近くなるほど正確な残り時間を表示するようにしてある。
この計量完了までの残り時間の表示により、穀粒袋29の搬出交換を行うまでの時間を有効に利用することができ、又、現時点の充填量や流量等を表示させるよりも作業者が計量完了時期を正確に容易に判断することが可能である。
【0013】
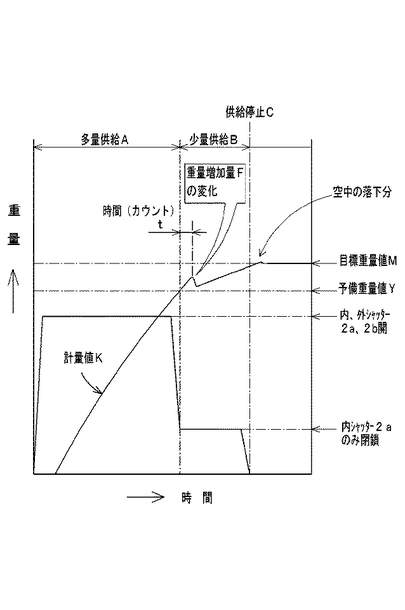
図2に示すグラフは計量器4による計量値Kの変化と、シャッター2の開閉状態を示したものである。まず内、外シャッター2a,2bを開放させた時点からやや遅れて計量値Kが上昇を始め、穀粒袋29内に多量の穀粒が充填される。充填される穀粒の重量が予備重量値Yになると内シャッター2aが回動閉鎖し、穀粒は少量口15のみから放出されることとなる。この内シャッター2aを閉鎖した時から重量増加量Fの変化があるまでの時間tは、多量供給A状態で空中にある穀粒が、下方に充填された穀粒上に落下するまでの時間tであり、この多量供給A時の穀粒が全て落下した後は、引き続いて少量供給B状態の穀粒が落下することとなる。従って、シャッター2が多量供給Aから少量供給Bに切替えられた後、若干遅れて計量値Kが低下することとなり、少量供給Bに切替えられた時点から、この重量増加量Fが変化(低下)するまでの時間tを検出する。
この時間tは、落下する穀粒のシャッター2から充填穀粒の頂上まで落下時間と略同等であり、時間t(sec)と、少量供給B状態での流量x(g/sec)によりt×xを演算することで、シャッター2閉鎖後の重量増加量、すなわち、外シャッター2b閉鎖時に落下中の穀粒の落下重量を高精度で予測させることが可能となり、目標重量値Mに対し正確な重量で袋詰めを行うことができる。
【0014】
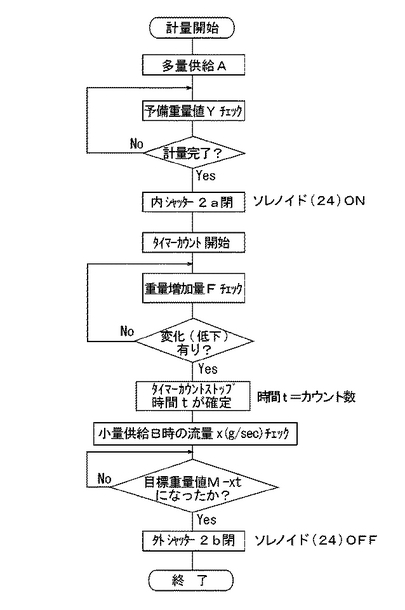
次に選別機の袋詰め作業について図7のフローチャートを参照に説明する。選別計量を開始し、シャッター2全開の多量供給A状態にすると、貯留タンク12の穀粒が供給口13から下方の穀粒袋29内へ流入する。穀粒袋29は計量器4上に載置してあり、該計量器4が予備重量値Yを計量すると、シャッター2のソレノイド24が通電されて内シャッター2aが閉鎖する。該内シャッター2aには少量供給Bのための少量口15が形成してあり、穀粒は少量口15から落下して少量づつの充填を行う。この多量供給Aから少量供給Bに切替えられた時点からタイマーがカウントを開始する。タイマーカウントは、重量増加量Fの変化が検出されるまでカウントされる。すなわちこのカウント数により、少量供給Bに切替えられた時点でのシャッター2から充填穀粒上端までの穀粒の落下時間tを検出することが可能である。落下時間tが検出されると、少量供給B時の流量x(g/sec)がわかれば、t×xを演算することで、シャッター2が全閉の供給停止C状態になった時点の、シャッター2下方の空中を落下している穀粒の重量を予測することができる。この落下中の重量を目標重量値Mから減じた重量でシャッター2を閉鎖すれば高精度の充填が可能である。
【図面の簡単な説明】
【0015】
【図1】制御のブロック図。
【図2】計量値を示すグラフ。
【図3】全体側断面図。
【図4】供給装置の断側面図。
【図5】内シャッターの斜視図。
【図6】外シャッターの斜視図。
【図7】フローチャート図。
【符号の説明】
【0016】
1 供給装置
2 シャッター
3 供給物
4 計量器
A 多量供給
B 少量供給
C 供給停止
F 重量増加量
M 目標重量値
Y 予備重量値
t 時間
【技術分野】
【0001】
本発明は、供給装置から連続して供給される粒状物や流体等の供給物を所定量に計量充填する定重量充填装置に関し、詳しくは、精度の良い定重量の充填が可能な定重量充填装置に関するものである。
【背景技術】
【0002】
特許文献1には、多量供給(大投入)段階での粉粒体の落下時間を計測し、この落下時間に少量供給(小投入)段階の粉粒体流量をかけて演算することにより、高精度の定量充填を行う技術が記載されている。
【特許文献1】特開平10−24901号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
特許文献1の技術は、シャッターが開くと落下時間計測タイマーが起動し、下方のロードセルが供給物の重量を検出した時、前記落下時間計測タイマーを停止させる。すなわちシャッターの高さから供給物が容器の底面に落下するまでの時間を計測するものである。容器への充填の場合、供給物の投入開始時と充填終了時とではシャッターから落下する供給物の落下距離もその落下中の供給物の量も異なるため、シャッターから容器底面までの供給物落下時間に基づいて演算しても誤差が大きく、更に高精度の定重量充填が望まれていた。
本発明は、目標重量値に対して更に高精度の充填が可能な定重量充填装置を提供することを課題とする。
【課題を解決するための手段】
【0004】
供給装置1下方に、少なくとも多量供給Aと少量供給B、及び、供給停止Cの三段階に切替え可能のシャッター2を設け、その下方には供給物3を受けて重量を計量する計量器4を配設し、該計量器4があらかじめ設定した目標重量値Mよりも若干軽い予備重量値Yを計量することで、前記シャッター2を少量供給Bに切替え制御する定重量充填装置において、該シャッター2を多量供給Aから少量供給Bに切替えた時点から、前記計量器4の計量する重量増加量Fが変化する時までの時間tを検出し、この検出時間tにより落下中にある供給物3量を演算し、シャッター2の供給停止C時期を決定してなる定重量充填装置の構成とする。
【発明の効果】
【0005】
供給装置1下方に、少なくとも多量供給Aと少量供給B、及び、供給停止Cの三段階に切替え可能のシャッター2を設け、その下方には供給物3を受けて重量を計量する計量器4を配設し、該計量器4があらかじめ設定した目標重量値Mよりも若干軽い予備重量値Yを計量することで、前記シャッター2を少量供給Bに切替え制御する定重量充填装置において、該シャッター2を多量供給Aから少量供給Bに切替えた時点から、前記計量器4の計量する重量増加量Fが変化する時までの時間tを検出するので、シャッター2から容器内に充填された供給物3の上端までの間を落下する落下時間tを正確に計測することができる。又、目標重量値Mよりも若干軽い予備重量値Yが計量された時点、すなわち、目標重量値Mに近い重量となった時点で、実際に落下中の供給物3の落下時間tに基づいて、シャッター2の供給停止C時期を決定するので、高精度の定重量充填を行うことが可能である。
【発明を実施するための最良の形態】
【0006】
次に、穀粒の選別計量袋詰めを行う縦型穀粒選別機に本発明装置を実施した形態について説明する。選別機本体は、立設する穀体10内に円筒状の選別筒30と該選別筒30内方に収納される揚穀用のラセン体31を同軸状に立設するとともに、下部のモータ57及びギヤボックス58により互いに逆方向に駆動回転可能に構成してある。
34は供給ホッパーであり、選別筒30下部の受粒筒35内へ籾摺後の玄米を供給可能であり、供給された玄米はラセン体31の回転によって選別筒30内を揚穀されながら選別され、屑粒は網目から選別域36へ放出され整粒は選別筒30上端部の整粒出口11から放出するよう構成してある。37は上下の仕切板であって屑粒を受けるとともに、選別筒30外周に固着される回転掻出羽根38により屑粒を取出口39から放出することができる。
【0007】
穀体10の上部には、整粒出口11に連通する貯留タンク12を前方へ突設してある。該貯留タンク12下方の供給口13にはシャッター2を設け、供給装置1を構成してある。
該シャッター2は軸14を中心に回動自在の内外二枚のシャッター2a,2bにより構成されており、内シャッター2aには供給口13の数分の一の大きさの少量口15を開設し、外シャッター2bは該少量口15を閉鎖可能な閉鎖部16を有してある。
内シャッター2a上部背面には、後方へ突出する係止部17を、又、外シャッター2bには、該係止部17が移動可能な開口部18と、係止部19とを設けてある。該係止部19には、後述の係止体23の通過を許容する広幅開口部26を基部に又、係止体23の通過を阻止し揺動板22の通過を許容する細幅開口部27を先端に形成してある。
【0008】
係止具20は、軸21に回動自在に枢支される逆くの字型の揺動板22と、該揺動板22一端に取着され両側に突出する係止体23とから構成されるとともに、揺動板22中央にソレノイド24を枢支連結し、該ソレノイド24への通電による吸着作用で前記揺動板22を引き、又、通電を断つことでスプリング25の弾発作用で揺動板22を押し出すよう構成してある。
【0009】
従って、穀粒の供給開始時にはソレノイド24を非通電状態で、内、外のシャッター2a,2bを上方に回動させると係止部19が係止体23に接当し揺動板22を軸21を中心にソレノイド24方向へ回動させ、該係止部19及び17を係止体23を越えて係合させ、供給口13を全開の多量供給A状態に切替える。
この状態からソレノイド24に通電すると、揺動板22が軸21を中心に引かれ係止体23による係止部17の係合が解除され内シャッター2aが供給口13をその少量口15を除いて回動閉鎖し少量供給B状態となる。又、この時外シャッター2bは係止部19の細幅開口部27両側を係止体23に係止されて保持される。
【0010】
次に、ソレノイド24を非通電状態にすると、揺動板22がスプリング25の弾発作用によって軸21を中心に押出され、係止体23が外シャッター2bの細幅開口部27から広幅開口部26へ移動しその係合を解除して、外シャッター2bは軸14を中心に回動し内シャッター2aの少量口15を閉鎖し供給停止C状態となる。
供給装置1下方にはロードセル方式の計量器4を設置し、該計量器4の計量信号は貯留タンク12前面の操作制御ボックス28からソレノイド24へ出力可能に結線されている。計量器4上面には穀粒袋29を載置し、供給口13から落下する穀粒の袋詰め作業を行うものである。
【0011】
図1は、制御回路のブロック図であり、計量器4の計量信号は操作制御ボックス28内へ入力され、A/Dコンバーター40によりA/D変換され、CPU41に入力される。この入力信号はRAM42によって設定指示される目標重量値Mとこの目標重量値Mより若干軽い予備重量値Yと比較演算されソレノイド24を作動させるシャッター制御手段43へ出力すべく構成してある。該シャッター制御手段43はタイマーカウンターを有し、時間検出が可能である。43はROM、44は操作スイッチ、45は表示管駆動回路、46は表示管であり、計量状態を表示する。又、47はランプ駆動回路であり、計量終了時にランプ48を点滅させる。
【0012】
表示管46は計量状態を表示する以外に、計量完了までの残り時間も表示するよう構成してある。この残り時間の表示は、計量途中にある穀粒の質量Pと流量Wから算出することができる。
計量器4に穀粒袋29のみを載せた状態、すなわち計量開始前の状態の質量をP0とすると、所定の質量P1までに要した時間をT1とし、この時の流量をW1とすると、W1=(P1−P0)/T1となり、目標重量値Mに充填されるまでの残り時間X1は、X1=(M−P1)/W1となる。
次に、上記所定質量P1の状態から所定質量P2になるまでに要した時間をT2とし、この時の流量をW2とすると、W2=(P2−P1)/T2となり、目標重量値Mに充填されるまでの残り時間X2はX2=(M−P2)/W2となる。
このように、計量中にはP1,P2,P3・・・の順に、計量完了までに数回の測定を行い、残り時間の表示は、最も新しいその区間の流量Wを用いて、計量完了に近くなるほど正確な残り時間を表示するようにしてある。
この計量完了までの残り時間の表示により、穀粒袋29の搬出交換を行うまでの時間を有効に利用することができ、又、現時点の充填量や流量等を表示させるよりも作業者が計量完了時期を正確に容易に判断することが可能である。
【0013】
図2に示すグラフは計量器4による計量値Kの変化と、シャッター2の開閉状態を示したものである。まず内、外シャッター2a,2bを開放させた時点からやや遅れて計量値Kが上昇を始め、穀粒袋29内に多量の穀粒が充填される。充填される穀粒の重量が予備重量値Yになると内シャッター2aが回動閉鎖し、穀粒は少量口15のみから放出されることとなる。この内シャッター2aを閉鎖した時から重量増加量Fの変化があるまでの時間tは、多量供給A状態で空中にある穀粒が、下方に充填された穀粒上に落下するまでの時間tであり、この多量供給A時の穀粒が全て落下した後は、引き続いて少量供給B状態の穀粒が落下することとなる。従って、シャッター2が多量供給Aから少量供給Bに切替えられた後、若干遅れて計量値Kが低下することとなり、少量供給Bに切替えられた時点から、この重量増加量Fが変化(低下)するまでの時間tを検出する。
この時間tは、落下する穀粒のシャッター2から充填穀粒の頂上まで落下時間と略同等であり、時間t(sec)と、少量供給B状態での流量x(g/sec)によりt×xを演算することで、シャッター2閉鎖後の重量増加量、すなわち、外シャッター2b閉鎖時に落下中の穀粒の落下重量を高精度で予測させることが可能となり、目標重量値Mに対し正確な重量で袋詰めを行うことができる。
【0014】
次に選別機の袋詰め作業について図7のフローチャートを参照に説明する。選別計量を開始し、シャッター2全開の多量供給A状態にすると、貯留タンク12の穀粒が供給口13から下方の穀粒袋29内へ流入する。穀粒袋29は計量器4上に載置してあり、該計量器4が予備重量値Yを計量すると、シャッター2のソレノイド24が通電されて内シャッター2aが閉鎖する。該内シャッター2aには少量供給Bのための少量口15が形成してあり、穀粒は少量口15から落下して少量づつの充填を行う。この多量供給Aから少量供給Bに切替えられた時点からタイマーがカウントを開始する。タイマーカウントは、重量増加量Fの変化が検出されるまでカウントされる。すなわちこのカウント数により、少量供給Bに切替えられた時点でのシャッター2から充填穀粒上端までの穀粒の落下時間tを検出することが可能である。落下時間tが検出されると、少量供給B時の流量x(g/sec)がわかれば、t×xを演算することで、シャッター2が全閉の供給停止C状態になった時点の、シャッター2下方の空中を落下している穀粒の重量を予測することができる。この落下中の重量を目標重量値Mから減じた重量でシャッター2を閉鎖すれば高精度の充填が可能である。
【図面の簡単な説明】
【0015】
【図1】制御のブロック図。
【図2】計量値を示すグラフ。
【図3】全体側断面図。
【図4】供給装置の断側面図。
【図5】内シャッターの斜視図。
【図6】外シャッターの斜視図。
【図7】フローチャート図。
【符号の説明】
【0016】
1 供給装置
2 シャッター
3 供給物
4 計量器
A 多量供給
B 少量供給
C 供給停止
F 重量増加量
M 目標重量値
Y 予備重量値
t 時間
【特許請求の範囲】
【請求項1】
供給装置(1)下方に、少なくとも多量供給(A)と少量供給(B)、及び、供給停止(C)の三段階に切替え可能のシャッター(2)を設け、その下方には供給物(3)を受けて重量を計量する計量器(4)を配設し、該計量器(4)があらかじめ設定した目標重量値(M)よりも若干軽い予備重量値(Y)を計量することで、前記シャッター(2)を少量供給(B)に切替え制御する定重量充填装置において、該シャッター(2)を多量供給(A)から少量供給(B)に切替えた時点から、前記計量器(4)の計量する重量増加量(F)が変化する時までの時間(t)を検出し、この検出時間(t)により落下中にある供給物(3)量を演算し、シャッター(2)の供給停止(C)時期を決定してなる定重量充填装置。
【請求項1】
供給装置(1)下方に、少なくとも多量供給(A)と少量供給(B)、及び、供給停止(C)の三段階に切替え可能のシャッター(2)を設け、その下方には供給物(3)を受けて重量を計量する計量器(4)を配設し、該計量器(4)があらかじめ設定した目標重量値(M)よりも若干軽い予備重量値(Y)を計量することで、前記シャッター(2)を少量供給(B)に切替え制御する定重量充填装置において、該シャッター(2)を多量供給(A)から少量供給(B)に切替えた時点から、前記計量器(4)の計量する重量増加量(F)が変化する時までの時間(t)を検出し、この検出時間(t)により落下中にある供給物(3)量を演算し、シャッター(2)の供給停止(C)時期を決定してなる定重量充填装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2006−21777(P2006−21777A)
【公開日】平成18年1月26日(2006.1.26)
【国際特許分類】
【出願番号】特願2004−198815(P2004−198815)
【出願日】平成16年7月6日(2004.7.6)
【出願人】(000144980)株式会社アテックス (111)
【Fターム(参考)】
【公開日】平成18年1月26日(2006.1.26)
【国際特許分類】
【出願日】平成16年7月6日(2004.7.6)
【出願人】(000144980)株式会社アテックス (111)
【Fターム(参考)】
[ Back to top ]