
実体の表現方法、実体の分類方法及び分類装置、実体表現のストア(store)を確立する方法、実体の表現を生成する装置、コンピュータプログラム、並びに信号処理装置
【課題】複雑な形状の移動物標による後方散乱信号を受信し、物標の存在や分類を行う場合、アスペクト角のわずかな変化によって後方散乱信号に大きな変動を生じ、統計的推定値の誤差が非常に大きくなる。この誤差を少なくし、信頼性の高い形状記述子を得る。
【解決手段】実体に質問信号を当て、実体からの反射を繰り返しサンプリングして、反射信号の強度にそれぞれ依存する第1の組の値を得る。このサンプル値に対数変換を適用して、第2の組の値を得る。特定の算式により、第2の組の値の平均値と中央値の差を表す第1の記述子の値(L)と、第2の組の値の各々と第2の組の値の代表値との間の偏差の絶対値の平均値を表す第2の記述子の値(D)とを少なくとも含む一組の記述子を導出し、これを異なるアスペクト角において取得する。これらのデータを記憶された複数のデータ集合と比較して物標を分類する。
【解決手段】実体に質問信号を当て、実体からの反射を繰り返しサンプリングして、反射信号の強度にそれぞれ依存する第1の組の値を得る。このサンプル値に対数変換を適用して、第2の組の値を得る。特定の算式により、第2の組の値の平均値と中央値の差を表す第1の記述子の値(L)と、第2の組の値の各々と第2の組の値の代表値との間の偏差の絶対値の平均値を表す第2の記述子の値(D)とを少なくとも含む一組の記述子を導出し、これを異なるアスペクト角において取得する。これらのデータを記憶された複数のデータ集合と比較して物標を分類する。
【発明の詳細な説明】
【技術分野】
【0001】
[発明の背景]
発明の分野
本発明は、有限の組の信号サンプルから信号の統計パラメータを求める方法及び装置に関し、特に、限定するものではないが、陸上車両等の複雑な人工物を含む物理的実体(entity)によって後方散乱される電磁波の変動電力に含まれる情報を使用することにより、そのような実体の特徴付け及び分類に応用可能である。以下の説明は、主に物体の分類に言及するが、海面反射、音波等といった他の実体の分類にも広く適用可能である。
【0002】
従来技術の説明
調査対象の物体、系、又は現象が、電気信号、音響信号、電磁信号(本明細書中では無線信号と光信号の両方を含むことが意図される)等であるところのプローブ信号のいくつかの特性を変更する状況は多い。一種の用途では、プローブ信号に対する応答の強度すなわち電力のみを求めることができる。一般に、物体の特徴及び特性に関する少なくともいくらかの不完全な情報が、観測される応答信号にカプセル化される。したがって、調査対象の物体に対する推測はいずれも、応答信号を特徴付ける一組の情報性の高い(informative)記述子又はパラメータを構築するステップを含まなければならない。
【0003】
以下でより詳細に説明するように、応答信号の記述子を求めることが有用である一例は、対象車両に電磁波エネルギーパルスを照射し、車両により反射される信号の電力を解析することに基づく陸上車両の分類である。こうした全天候型の分類技法は、監視を目的として設置される様々な自動監視システムにおいて使用され、例えば、橋、トンネル、並びに、発電所、ガス及び石油貯蔵システム、貯水及び給水システム等を含む重要な産業施設、に至る道路における改善された連続監視を提供する。
【0004】
陸上車両のような典型的な人工の対象物は、平板、曲面、コーナーリフレクタ、様々なキャビティ等を含む規則的なデザインを有する複数の構成要素である散乱体(component scatterers)からなる。質問波形(interrogating waveform)の周波数が固定されている場合、及びアスペクト角(aspect angle)が固定されている場合、全ての個々の散乱体からの反射は、その固有の大きさ及び位相角を特徴とするベクトル量と見なすことができる。その結果、複雑な人工物によって後方散乱される全信号は、その物体を構成する全ての散乱体が寄与する反射のベクトル総和から得られる。したがって、複雑な人工物のアスペクト角がごくわずかでも変化すると、後方散乱信号に大きな変動が生じる可能性がある。
【0005】
さらに、主な構成要素である散乱体間の分離が多数の波長分に匹敵する場合、質問波形のキャリア周波数のわずかな変化でさえ、ベクトル総和の結果を、ひいては反射電力の値を大幅に変えてしまう。
【0006】
陸上車両の分類の場合、後方散乱信号の電力は周波数と(アスペクト)角度の両方に依存するものと仮定することができる。August W. Rihaczek及びStephen J. Hershkowits著「Theory and Practice of Radar Target Identification」(Artech House. Boston 2000)は、複雑な人工物を調査する際に実験的に観察される様々な散乱現象の詳細な解析を含む。
【0007】
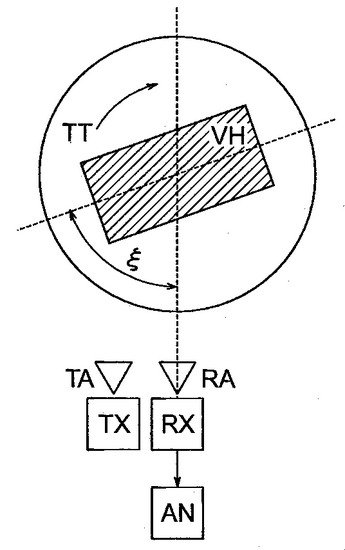
図1は、回転台(turntable)TT上で車両VHを回転させる仮想の(hypothetical)実験を示す。送信機TXが、適切な電磁波エネルギーパルスを使用して、送信アンテナTAを介して車両に照射を行う。車両VHから後方散乱されたコンポジット信号を、適切な解析器ANを組み込んだ固定受信機RXに接続された受信アンテナRAにより捕捉して、信号の瞬時電力を求める。車両VHと受信機RXのアスペクト角ξは連続的に変化するため、車両から後方散乱される信号のレベルは何らかの不規則な形で変動することになる。回転台の実験から得られるいくつかの選択された散乱データ例がPeyton Z. Peebles Jr.著「Radar Principles」(Wiley, New York 1998)に示される。
【0008】
質問パルスの時間間隔が十分に大きい場合、車両から反射される対応するパルスは相関しない。さらに、送信パルスの間隔に関係なく、反射パルスの非相関性(decorrelation)は、いわゆる周波数機敏性(frequency agility)技法を利用することによって、すなわち、送信キャリア周波数の値をパルス毎に適宜シフトすることによって達成することができる。非相関応答の使用は、統計的推測手順の効率を高めるため有利である。周波数機敏性技法は当業者によく知られている。
【0009】
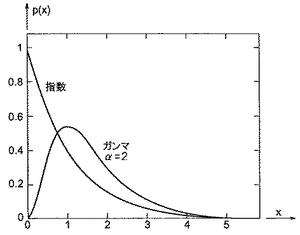
複雑な人工物によって後方散乱される信号の不規則性のために、移動する陸上車両によって反射される信号の電力は、正の値のみをとることができるランダム変数と見なすことができる。マイクロ波遠隔探知用途では、複雑な物体によって反射される変動電力は、以下の形式のガンマ確率密度関数(pdf)を含むいくつかのよく知られたpdfを特徴とする。
【0010】
【数1】

【0011】
ここで、xはランダム電力であり、Γ( )はガンマ関数であり、αは形状パラメータであり、σはスケールパラメータである。α=1及びα=2の場合、上記のpdfは、当業者に知られる2つの一般的な渦(Swerling)モデルを生じる。α=1である場合、ガンマ分布は指数分布となる。
【0012】
図2は、2つの渦モデルを表す確率密度関数を示す。
【0013】
後方散乱電力の他の一般的な統計モデルは、ワイブル(Weibull)分布及び対数正規(log-normal)分布に基づく。さらに別の、ライス(Rice)分布を利用するモデルは、対象物が1つの主要な反射体と、複数のより小さな散乱体とを含む場合に有用である。
【0014】
スケールパラメータσ自体がランダム変数となるように変更した、次式で表される指数分布
【0015】
【数2】
【0016】
に基づく後方散乱電力の広いクラスの統計モデルもある。スケールパラメータがガンマ分布に従って分布する場合、結果として得られるモデルはいわゆるK分布を有する。反射電力のスズキ(Suzuki)モデルは、スケールパラメータ自体が対数正規のランダム変数である場合に一次(primary)指数モデルから得られる。
【0017】
複雑な物体によって反射される変動電力の上記の全てのモデル及び他の確率モデルは2つのパラメータに依存する。1つのパラメータは反射電力の平均値に関連し、もう1つのパラメータは基礎となる確率分布の形状を特徴付ける。Peyton Z. Peebles Jr.著「Radar Principles」(Wiley, New York 1998)及びFred E. Nathanson著「Radar Design Principles」(2nd Ed., McGraw-Hill, New York 1991)に要約されている、反射電力の上記の統計モデルの特性及び適用性は、当業者によく知られている。
【0018】
上述した統計モデルは、基礎となる各確率密度関数が(明示的又は暗示的な)解析形状で与えられるため、特に物体検出に関する理論的研究に非常に有用である。しかし、それらのモデルの、実際の物体分類問題への適用性は、以下の理由から限られている。
− 提案されている全ての統計モデルにおいて、スケールパラメータが固定である場合、分布の「本体」(main 'body')と裾野との両方を含む分布形状をたった1つのパラメータが支配する。実験的に得られるサンプル数が少ないか又は中程度(例えば1000未満)である場合、基礎となる分布の裾野に関する統計的推測はいずれも信頼することができない。したがって、1つの形状パラメータに基づく分類手順の性能は不満足なものとなる。
− 多くの場合に、実験データから得られるヒストグラム(すなわち経験分布)を、「最適適合」を見付けるために或る範囲のモデル分布と比較すると、データに等しく良好に(又は等しく不良に)一致するモデルがいくつか出てくる。明らかに、このような本質的な曖昧さは分類の信頼性を高めることができない。
− かなりの数の統計モデルが想定され得るが、所与の実験データの組の特徴付けにより有用である可能性がある無限数の他の許容可能な分布が依然としてある。例えば、M1及びM2の2つが主要なモデル分布である場合、確率がηであるM1及び確率が(1−η)であるM2を選択することによって、新たな「ランダム化混合」モデルを構築することができる。明らかに、結果として得られるモデルは、2つの基礎となるモデルのいずれでも適切に表現することができない。
【0019】
モデル分布の形状を特徴付けるために、その解析形状に関係なく、様々な「形状パラメータ」が導入されている。例えば、変動電力の分布の歪度を測定するために、中央値に対する平均値の比を使用することが知られている。2つの渦モデルについて言えば、α=1及びα=2である場合、それぞれの比は1.44及び1.18となる。平均値の中央値に対する比は、いかなるスケールパラメータにも依存しないことを指摘しておく。
【0020】
数理統計学では、確率分布の歪度及び尖度(すなわち平坦さの尺度)に関連するγ1及びγ2の2つのパラメータも広く用いられている。2つのパラメータγ1及びγ2の実際の推定値は、検討中の分布のより高次のサンプルモーメントに基づく。{x1,x2,...xN}がN個の観測値の組である場合、γ1及びγ2の推定値は次式から求めることができる。
【0021】
【数3】
【0022】
ただし、
【0023】
【数4】
【0024】
である。ガウス分布の特別な場合、γ1=0且つγ2=0である。
【0025】
パラメータγ1及びγ2、又はこれらに機能的に関連するいくつかの他のパラメータは統計学の文献に頻繁に登場する。しかし、それらの、複雑な人工物から反射された電力に関する実験データの処理への適用性は、主に以下の3つの理由から限られている。
− 観測される電力のサンプルは常に負でない値であり、よって一般に、基礎となる分布は右側に歪む。しかし、このような事前情報は歪度パラメータγ1に組み込まれていない。
− 観測される電力のサンプル数が少ないか又は中程度(例えば1000未満)である場合、γ1及びγ2の推定値に関連する統計誤差は非常に大きく、物体の分類は信頼できない。
− 一般に、サンプルモーメントに基づく統計量は「ロバスト」でない。すなわち、それらの結果として生じる値は、異常に大きな又は小さな値を有する比較的少数の観測値(いわゆる「外れ値」)によって大きな影響を受ける可能性がある。
【0026】
したがって、特に後方散乱電磁波エネルギーの解析に基づいて実体を分類する目的で、ランダムに変動する電力又は強度の統計分布の情報性の高い形状記述子を求める改良された方法及び装置を提供することが望ましい。
【0027】
[発明の概要]
本発明の態様を添付の特許請求の範囲に記載する。
【0028】
本発明のさらなる態様によれば、正の対象観測量(observable)(例えば物体から反射される信号の電力又は強度)のN個のサンプルの組{x}={x1,x2,...,xN}を得、この一次組の各値xj(j=1,2,...,N)に対数変換を適用して、対応する値zj(ここでzj=ln xj)を生成する。その結果、一次組{x}は、結果として得られる二次組{z}={z1,z2,...,zN}により一意に表現される。xjの値は正にしかなり得ず、zjの値は正にも負にもなり得ることを指摘しておく。
【0029】
zj(j=1,2,...,N)の値を昇順又は降順に並べ替える。昇順が選択されている場合、ソート手順は、次のように並べられた二次組を生じることになる。
z(1)≦z(2)≦...≦z(N)
次に、二次組を用いて、一次組{x}の3つの記述子を次のように求める。
1.次式によって定義される中央値M
Nが奇数である場合、M=z([N+1]/2)
又は
Nが偶数である場合、M=0.5[z(N/2)+z([N/2]+1)]
Mの数値は、二次組{z}の「中心」値('central' value)を表すが、対数関数は単調であるため、一次組{x}の「中心」値はちょうどexp(M)となる。
2.次式によって定義される中央値マイナス平均値(median-minus-mean)L
【0030】
【数5】
【0031】
3.代表値からの平均(絶対)偏差D。(ここで、「代表値」という用語は、一組の値の中央値、平均値又は最頻値をカバーするように広範に意図される。)したがって、Dは、中央値からの偏差を表し得る。すなわち、
【0032】
【数6】
【0033】
であり、ここで、Mは中央値である。
【0034】
代替的に、記述子Dは、平均値からの平均偏差であってもよく、その場合、次式で表される。
【0035】
【数7】
【0036】
簡単な計算で得ることができる上記の3つの記述子M、L及びDは、集合的に、多くのクラスの正のランダム観測量、特に複雑な物体により後方散乱される電磁波の変動強度に対して優れた判別子を提供することが分かった。
【0037】
中央値Mは、一次組{x}の「中心」値に関連し、基礎となる統計モデルの形状に関する情報を含まないが、残りの2つの記述子L及びDは、スケールに対して不変であり、一緒になって、情報性の高い形状特性を提供する。したがって、物体は、記述子L及びDを用いて、Mを用いずに表現(及び分類)することができる。しかし、中央値Mの使用は、対象物によって反射される信号の代表レベルを求める上で有利であり得るため、それが有用である状況で(例えば、形状は同様であるがサイズの異なる物体の区別を助けるため、又は、物体の範囲のような補助情報を提供するために)用いられてもよい。
【0038】
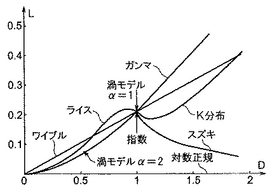
本発明により構築される「D−L平面」又は「D−L領域」により提供される利点の理解は、図3を検証することによって高めることができる。図3は、変動する電力又は強度のような正の観測量の多くの既知の統計モデルの相対的な位置を示す。
【0039】
各モデルは別個の曲線で表され、選択された曲線上の各点は、形状記述子D及びLという2つの特定の値に対応する。例えば、「ガンマ」と記された曲線は、ガンマモデルが「サポート」することのできるD及びLの値の全ての可能な対を表す。特に、2つの渦モデルはそれぞれ、固有の座標対を有する点により表され、これらの点の一方(α=1の場合)は指数分布に相当する。
【0040】
D−L平面の特性、及び一次組{x}の視覚化された統計モデルの特性は、以下のように要約することができる。
− 原点(D=0及びL=0)は、変動のないデルタ関数δ[x−exp(M)]に「縮退した(degenerated)」分布p(x)を表し、表示する各分布は、スズキ及びK分布を除き、その分散が0に近づくにつれてこの点に向かう。
− 正の軸(D>0及びL=0)は、xの対数正規分布を表し、対数変換z=ln x後にzのガウス分布となる。ガウス分布は対称であることが知られており、その平均値及び中央値は同じ点で一致する。よってL=0である。
− 線L=gD(ここでg≒0.21)はワイブル分布を表す。ワイブルのランダム変数Wは、指数のランダム変数Vから、変換W=Vεを適用することによって得ることができ、ここで、0<ε≦1はパラメータである。対数変換後、εはスケールパラメータとなり、ε=1についてW≡Vであるため、線L=gDは、指数分布を表す点を通らなければならない。
− スズキのランダム変数とK分布のランダム変数はともに、指数のランダム変数から、そのスケールをランダムに「調節」することによって導出する。したがって、これらの分布はそれぞれ、ランダムな調節の分散が0に向かうにつれて、指数分布に近づくことになる。これら2つの分布はいずれも、指数分布の値よりも低い記述子Dの値に達することができないことに留意すべきである。
− 統計的通信(statistical communications)では、ある1つの別個の定数成分の寄与を、重要度の等しい複数のランダム成分の寄与と組み合わせたモデルによって生成される、観測量を特徴付けるためにライス分布を用いる。例えば、ライス分布を、1つの主要な反射体と、複数のより小さな散乱体とを含む物体によって後方散乱される電力のモデルとして用いる。D−L平面において、ライス分布は、別個の成分の寄与が徐々に減少し、そのうち他の全ての成分の寄与と同程度になるにつれて、指数分布を表す点に近づく。一方、別個の成分の寄与がますます支配的になると、ライス分布は原点(D=0及びL=0)に近づく。ライス分布は、指数分布の値よりも大きい記述子Dの値に達することができないことに留意すべきである。
【0041】
D−L領域において指数分布が果たす「中心点」の役割は単純に、指数分布が数理統計学において傑出していることを反映する。
【0042】
次に、本発明を具現する構成を例として、添付図面を参照して説明する。
【0043】
[好適な実施形態の詳細な説明]
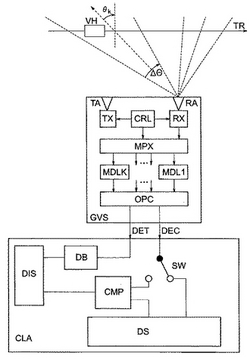
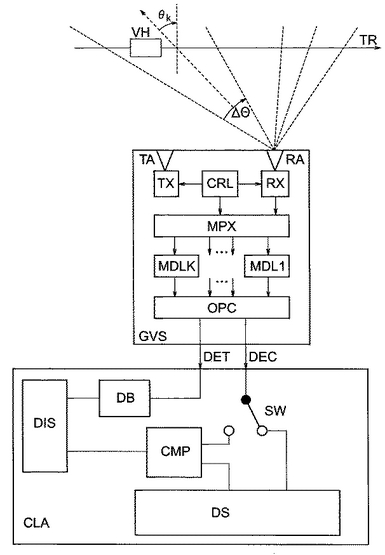
図4は、本発明による分類システムを、本発明を有効に使用することができる可能な監視シナリオの一例において示す。未知のクラスの陸上車両VHが、例えば道路によって物理的に画定される所定の軌道TRに沿って移動している。マイクロ波陸上車両センサGVSが、電磁波エネルギーパルスを使用して、監視領域に照射を行う。次に、この領域によって後方散乱される信号の電力特性を解析することによって、陸上車両センサGVSが車両を検出し、検出された車両が属する可能性が最も高いクラスに関して判定を行う。
【0044】
センサGVSは、車両の有無の判定に用いられる検出信号DETと、車両の分類に用いられる記述子を含む記述子信号DECとを出力する。
【0045】
これらの信号を車両検出器/分類器CLAにより受信する。検出信号DETを判定ブロックDBに送って車両の有無を判定し、この判定の結果をディスプレイDISに送る。スイッチSWを訓練モード位置にセットした状態で示す。この位置では、記述子信号DECを記述子ストア(store)DSに送る。代替的に、スイッチSWは認識モード位置にセットすることもできる。この位置では、記述子信号を比較器CMPに送って、それぞれ異なる物体カテゴリに関連付けられた記述子の集合と次々に比較し、記述子ストアDSに記憶する。比較の結果をディスプレイDISに表示する。
【0046】
よって、図示のシステムは、特定のカテゴリの車両を認識するように訓練される機能を有する。統計モデルの訓練に通常用いられる様々な技法を使用することができる。例えば、記述子ストアDSに記憶されるデータは、各カテゴリの車両の複数の測定値の統計解析から導出することができる。記憶されるデータはそれぞれのカテゴリのテンプレートを表すことができ、認識手順は、例えば分類すべき物体の記述子を表す多次元空間の点と、オブジェクトカテゴリを表す点との間の距離を計算することによって、新たに取得されたデータをこれらのテンプレートと照合することを伴い得る。代替的に、ニューラルネットワーク技法を用いることもでき、その場合、訓練中に導出された記述子が(自明の方法で)用いられ、ニューロンの重みを導出する。
【0047】
車両の検出及び分類という要求される機能を実施するために、陸上車両センサGVSは、適切な送信アンテナTAを駆動するマイクロ波パルス送信機TXと、受信機RXに接続された受信アンテナRAと、制御ユニットCRLと、マルチプレクサMPXと、複数の記述子プロセッサMDL1、...、MDLKと、出力回路OPCとを備える。
【0048】
陸上車両センサGVSは、図4に示されるように、公称「ルック」角θk及び角度範囲ΔΘをそれぞれ特徴とするK個の視野FOV1、...、FOVk、...、FOVKを使用する。センサ装置は、送信機TX及び送信アンテナTAにより送信され、各視野FOV内の移動車両によって反射されたエネルギーパルスを受信アンテナ及び受信機RXにより捕捉するように動作するように構成される。
【0049】
図4に示すシナリオでは、車両が所定の経路に沿って移動しているため、アスペクト角は連続的に変化し、車両によって反射されるパルスの電力は不規則に変動する。質問パルスの間隔が短すぎて、反射パルスの非相関性を得ることができない場合、上述のように、周波数機敏性をさらに使用することが有利である場合がある。付加的に、又は代替的に、質問信号の偏波を変化させてもよい。
【0050】
図4の陸上車両センサGVSは、センサの視野FOV1、...、FOVK及び車両の速度によって決まるK個の観測間隔中に車両によって反射されたパルスを捕捉する。捕捉されるパルスの実際の数もまた、監視領域に照射される送信パルスの繰り返し数に依存することになる。受信機RXは、K組の値を作成し、各組は、選択された視野FOV内を移動する車両によって反射された各パルスの電力の値{x1,x2,...,xN}を含む。
【0051】
次に、各視野FOV内の監視領域から反射されたパルスの各組を、マルチプレクサMPXによって、記述子プロセッサMDL1、...、MDLKの各々に送出して処理し、3つの記述子M、D及びLの値を求める。次に、出力回路OPCによって中央値M1、M2、...、MKを収集して検出信号DETを生成し、分類器CLAが監視領域内の車両の有無に関して判定を行うことを可能にする。次に、出力回路OPCによって3つの記述子の全ての値M1、D1、L1、M2、D2、L2、...、MK、DK及びLKを収集し、記述子信号DECとして適切な形式で供給する。この信号は、分類器が、検出された車両が属する可能性が最も高いクラスに関して判定を行うために使用する。
【0052】
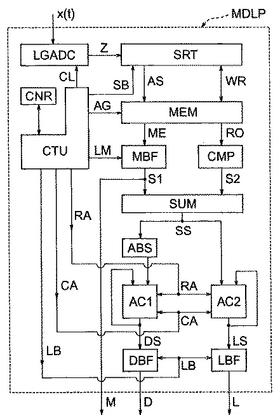
図5は、本発明により動作するように構成されたデジタル記述子プロセッサ(MDLP)のブロック図である。記述子プロセッサMDL1、...、MDLKの各々がこのプロセッサMDLPに対応する構造を有しても、単一のプロセッサMDLPを連続的に用いて複数のプロセッサMDL1、...、MDLKの機能を果たしてもよい。
【0053】
プロセッサMDLPは、対数アナログ/デジタル変換器LGADCと、ソータSRTと、制御・タイミングユニットCTUと、サンプルカウンタCNRと、メモリMEMと、3つのバッファMBF、DBF及びLBFと、補数値(complement-value)回路CMPと、加算器SUMと、絶対値回路ABSと、2つの累算器AC1及びAC2とを備える。
【0054】
電力又は強度のような対象観測量を表す正の入力信号x(t)の値を変換器LGADCにより、ユニットCTUが供給するクロックパルスCLによって決められた時刻においてデジタル形式に変換する。その結果、変換器LGADCの出力Zはデジタルワードシーケンス(sequence of digital words)を生成する。各デジタルワードは、tjにおいて取得されたx(t)のサンプルの対数zjを表す。よってzj=ln x(tj)である。
【0055】
プロセッサMDLP(バッチ処理モードで動作する)が処理すべき事前に選択された数Nの入力サンプルを求めるために、ユニットCTUは適切なサンプルカウンタCNRを使用する。プロセッサMDLPの動作は2つのサイクル、すなわち、ソート(SORT)サイクルとそれに続く計算(COMPUTE)サイクルを含む。これら2つのサイクルはそれぞれ、プロセッサMDLPの正確な動作に必要な全てのタイミング信号及び制御信号を生成するユニットCTUにより開始され、また終了される。
【0056】
ユニットCTUは、入力SBを介してソータSRTに「イネーブルコマンド」を送ることによってソートサイクルを開始する。ソータSRTは、変換器LGADCからデジタルワードzjを受信する。ソータSRTは、受信したデジタルワードを昇順又は降順に並べ替える。この目的で、ソータSRTには、2つのバス、すなわちアドレスバスASと書き込み/読み取りバスWRを有するメモリMEMを使用する。ソータSRTは、当業者によく知られた多くのソートアルゴリズムのいずれかを実施することができる。
【0057】
事前に選択された数Nの入力サンプルをカウンタCNRが記録するとすぐに、ユニットCTUは、入力SBを介してソータSRTをディセーブルすることによってソートサイクルを終了する。次に、ユニットCTUは、共通入力RAを介して累算器AC1及びAC2をリセットすることによって計算サイクルを開始する。ユニットCTUはまた、バッファMBFの「ロード」入力を駆動する適切な信号を出力LMにおいて生成することによって、メモリMEMからバッファMBFに中央値をロードする。バッファMBFの「データ」入力MEは、N個の入力サンプルの組の中央値を含む所定のメモリセルに接続される。さらなる計算を回避するために、処理されるサンプルの数Nは奇数となることが好ましい。
【0058】
計算サイクル中に、ユニットCTUは、サンプルカウンタCNRを使用して、メモリMEMのアドレスバスに接続された出力AGにおいて適切なアドレスシーケンスを生成する。結果として、メモリMEMに記憶される全ての値zjが、補数値回路CMPに接続された読み取り出力ROに順次現れる。回路CMPの目的は、メモリMEMが供給するデジタルワードの符号を逆にすることである。
【0059】
加算器SUMは、2つの入力値、すなわち、入力S1において中央値Mを、入力S2において逆極性のサンプル −zjを受け取る。したがって、加算器SUMは、和(M−zj)を表す値を出力SSにおいて生成し、絶対値回路ABSを用いて、対応する大きさ|M−zj|を得る。したがって、累算器AC1及びAC2はそれぞれ以下の総和の値を求める。
【0060】
【数8】
【0061】
累算器の動作のタイミングは、ユニットCTUが共通クロック入力CAを介して供給する適切なクロックパルスにより管理する。
【0062】
メモリMEMに記憶されていた全てのサンプルを使い果たしたら、累算器AC1及びAC2の内容を、ユニットCTUが供給する適切な信号によって決められた時刻においてそれぞれのバッファDBF及びLBFに転送し、これらのバッファの共通「ロード」入力LBを駆動する。したがって、計算サイクルの終了時に、MDLプロセッサの出力M、D及びLは、処理された入力サンプル組を特徴付ける記述子M、D及びLを表す値を供給する。必要であれば、記述子D及びLの値を、例えば単純に、それぞれの二値表現の適切に選択された数の最上位ビットを使用することによって正規化することができる。
【0063】
上記の構成では、さらなる処理に使用される入力信号x(t)からサンプルが一組だけ取得されるものと仮定する。したがって、計算サイクル中、ソータSRTはアイドル状態であり続ける。しかし、2つのメモリを使用して、その一方をソート目的にのみ使用し、他方が計算サイクルで使用されるソート済の値を記憶することによって、連続動作を達成することができる。このような変更された構成を使用する場合、ソートと計算という2つのサイクルを同時に実行することができる。すなわち、ソート済のサンプル組が計算に使用されている間に、ソータが新たな入力サンプルシーケンスを適切に並べ替える。
【0064】
上述の実施形態は、観測角又は視野FOV毎に一組の記述子を導出することによって機能する。複数組の記述子を分類目的に用いる。しかし、代替的な技法も可能である。例えば、本システムは、全視野にわたって取得したサンプルから一組の記述子を導出し、この一組を分類目的に使用するように構成することもできる。この場合、一組の記述子は、1つの視点から観察される形状のみでなく、物体の全体的な構成に大きく影響を受ける。
【0065】
状況に応じて、1つの観測角から導出される一組の記述子を分類目的に使用することも可能である。
【0066】
記載した実施形態において、処理される信号は質問信号の反射である。しかし、必ずしもこれに限られるものではない。例えば、処理される信号は、音波、例えば、対象物により生成される音響信号、又は別個の発生源(例えば周囲光)からの波の反射であってもよい。
【0067】
本発明は、物体の分類だけでなく、多くの分野に応用可能である。本発明は、通信信号を監視して干渉やシャドウイングにより生じる伝搬誤差を検出するか、又は、海面反射若しくは地上反射(land clutter)又は気象条件を検出するため、又は、色又はテクスチャを表す信号を用いた分類のために使用することができる。特に有用な種類の応用は、帰無仮説を用いて機能する。すなわち、本システムは、正常な状況(例えば、海面反射を表す信号)の分類を表すデータを記憶し、受信した信号が(例えば船や人物のような物体の存在による)その状況とのずれを表す場合を判定し、この判定に応答して検出信号を生成するように構成される。したがって、分類プロセスは単純な二値のはい/いいえ(yes/no)判定となる。
【0068】
図4及び図5を参照して説明した実施形態は、ハードウェアにおいて完全に具現することができ、その場合、当業者は、様々なブロックの必要な機能を実施するための適切な詳細に渡る回路構成を容易に設計及び構築することができる。別法として、これらの機能の一部を、サンプル値を受信してそこから記述子を導出する適切にプログラムされた汎用コンピュータ又は専用コンピュータを用いてソフトウェアにおいて行ってもよい。したがって、本発明は、そのようなプログラムされたコンピュータ、及びコンピュータをそのような方法で動作させるように構成されたコンピュータプログラム、並びにそのようなプログラムを保持するプログラムキャリアに適用される。一般に、本発明は、その構成方法に関係なく、信号処理装置に適用される。
【0069】
対数変換を実施する場合、自明の様々な技法を実行することができる。結果が対数変換を少なくとも近似する限り、結果が完全に正確であることは重要でない。
【0070】
上記の、本発明の好適な実施形態の説明は、例示及び説明のために提示してきた。説明が網羅的であること、又は、本発明を開示した形態そのものに限定すること、は意図していない。上記の説明に鑑みて、当業者は、多くの改変、変更、及び変形により、本発明を意図する特定の用途に適した様々な実施形態で使用することができることは明らかである。
【図面の簡単な説明】
【0071】
【図1】回転台上で回転する車両に電磁波エネルギーパルスを照射して車両の後方散乱特性を求める仮想の実験の概略図である。
【図2】2つの渦モデルを表す確率密度関数を示す図である。
【図3】本発明により構築される、変動する電力又は強度等のような正の観測量の多くの既知の統計モデルの相対的な位置を視覚化する「D−L領域」を示す図である。
【図4】本発明による分類システムを示す図である。
【図5】図4のシステム内で使用されるデジタルプロセッサのブロック図である。
【技術分野】
【0001】
[発明の背景]
発明の分野
本発明は、有限の組の信号サンプルから信号の統計パラメータを求める方法及び装置に関し、特に、限定するものではないが、陸上車両等の複雑な人工物を含む物理的実体(entity)によって後方散乱される電磁波の変動電力に含まれる情報を使用することにより、そのような実体の特徴付け及び分類に応用可能である。以下の説明は、主に物体の分類に言及するが、海面反射、音波等といった他の実体の分類にも広く適用可能である。
【0002】
従来技術の説明
調査対象の物体、系、又は現象が、電気信号、音響信号、電磁信号(本明細書中では無線信号と光信号の両方を含むことが意図される)等であるところのプローブ信号のいくつかの特性を変更する状況は多い。一種の用途では、プローブ信号に対する応答の強度すなわち電力のみを求めることができる。一般に、物体の特徴及び特性に関する少なくともいくらかの不完全な情報が、観測される応答信号にカプセル化される。したがって、調査対象の物体に対する推測はいずれも、応答信号を特徴付ける一組の情報性の高い(informative)記述子又はパラメータを構築するステップを含まなければならない。
【0003】
以下でより詳細に説明するように、応答信号の記述子を求めることが有用である一例は、対象車両に電磁波エネルギーパルスを照射し、車両により反射される信号の電力を解析することに基づく陸上車両の分類である。こうした全天候型の分類技法は、監視を目的として設置される様々な自動監視システムにおいて使用され、例えば、橋、トンネル、並びに、発電所、ガス及び石油貯蔵システム、貯水及び給水システム等を含む重要な産業施設、に至る道路における改善された連続監視を提供する。
【0004】
陸上車両のような典型的な人工の対象物は、平板、曲面、コーナーリフレクタ、様々なキャビティ等を含む規則的なデザインを有する複数の構成要素である散乱体(component scatterers)からなる。質問波形(interrogating waveform)の周波数が固定されている場合、及びアスペクト角(aspect angle)が固定されている場合、全ての個々の散乱体からの反射は、その固有の大きさ及び位相角を特徴とするベクトル量と見なすことができる。その結果、複雑な人工物によって後方散乱される全信号は、その物体を構成する全ての散乱体が寄与する反射のベクトル総和から得られる。したがって、複雑な人工物のアスペクト角がごくわずかでも変化すると、後方散乱信号に大きな変動が生じる可能性がある。
【0005】
さらに、主な構成要素である散乱体間の分離が多数の波長分に匹敵する場合、質問波形のキャリア周波数のわずかな変化でさえ、ベクトル総和の結果を、ひいては反射電力の値を大幅に変えてしまう。
【0006】
陸上車両の分類の場合、後方散乱信号の電力は周波数と(アスペクト)角度の両方に依存するものと仮定することができる。August W. Rihaczek及びStephen J. Hershkowits著「Theory and Practice of Radar Target Identification」(Artech House. Boston 2000)は、複雑な人工物を調査する際に実験的に観察される様々な散乱現象の詳細な解析を含む。
【0007】
図1は、回転台(turntable)TT上で車両VHを回転させる仮想の(hypothetical)実験を示す。送信機TXが、適切な電磁波エネルギーパルスを使用して、送信アンテナTAを介して車両に照射を行う。車両VHから後方散乱されたコンポジット信号を、適切な解析器ANを組み込んだ固定受信機RXに接続された受信アンテナRAにより捕捉して、信号の瞬時電力を求める。車両VHと受信機RXのアスペクト角ξは連続的に変化するため、車両から後方散乱される信号のレベルは何らかの不規則な形で変動することになる。回転台の実験から得られるいくつかの選択された散乱データ例がPeyton Z. Peebles Jr.著「Radar Principles」(Wiley, New York 1998)に示される。
【0008】
質問パルスの時間間隔が十分に大きい場合、車両から反射される対応するパルスは相関しない。さらに、送信パルスの間隔に関係なく、反射パルスの非相関性(decorrelation)は、いわゆる周波数機敏性(frequency agility)技法を利用することによって、すなわち、送信キャリア周波数の値をパルス毎に適宜シフトすることによって達成することができる。非相関応答の使用は、統計的推測手順の効率を高めるため有利である。周波数機敏性技法は当業者によく知られている。
【0009】
複雑な人工物によって後方散乱される信号の不規則性のために、移動する陸上車両によって反射される信号の電力は、正の値のみをとることができるランダム変数と見なすことができる。マイクロ波遠隔探知用途では、複雑な物体によって反射される変動電力は、以下の形式のガンマ確率密度関数(pdf)を含むいくつかのよく知られたpdfを特徴とする。
【0010】
【数1】
【0011】
ここで、xはランダム電力であり、Γ( )はガンマ関数であり、αは形状パラメータであり、σはスケールパラメータである。α=1及びα=2の場合、上記のpdfは、当業者に知られる2つの一般的な渦(Swerling)モデルを生じる。α=1である場合、ガンマ分布は指数分布となる。
【0012】
図2は、2つの渦モデルを表す確率密度関数を示す。
【0013】
後方散乱電力の他の一般的な統計モデルは、ワイブル(Weibull)分布及び対数正規(log-normal)分布に基づく。さらに別の、ライス(Rice)分布を利用するモデルは、対象物が1つの主要な反射体と、複数のより小さな散乱体とを含む場合に有用である。
【0014】
スケールパラメータσ自体がランダム変数となるように変更した、次式で表される指数分布
【0015】
【数2】
【0016】
に基づく後方散乱電力の広いクラスの統計モデルもある。スケールパラメータがガンマ分布に従って分布する場合、結果として得られるモデルはいわゆるK分布を有する。反射電力のスズキ(Suzuki)モデルは、スケールパラメータ自体が対数正規のランダム変数である場合に一次(primary)指数モデルから得られる。
【0017】
複雑な物体によって反射される変動電力の上記の全てのモデル及び他の確率モデルは2つのパラメータに依存する。1つのパラメータは反射電力の平均値に関連し、もう1つのパラメータは基礎となる確率分布の形状を特徴付ける。Peyton Z. Peebles Jr.著「Radar Principles」(Wiley, New York 1998)及びFred E. Nathanson著「Radar Design Principles」(2nd Ed., McGraw-Hill, New York 1991)に要約されている、反射電力の上記の統計モデルの特性及び適用性は、当業者によく知られている。
【0018】
上述した統計モデルは、基礎となる各確率密度関数が(明示的又は暗示的な)解析形状で与えられるため、特に物体検出に関する理論的研究に非常に有用である。しかし、それらのモデルの、実際の物体分類問題への適用性は、以下の理由から限られている。
− 提案されている全ての統計モデルにおいて、スケールパラメータが固定である場合、分布の「本体」(main 'body')と裾野との両方を含む分布形状をたった1つのパラメータが支配する。実験的に得られるサンプル数が少ないか又は中程度(例えば1000未満)である場合、基礎となる分布の裾野に関する統計的推測はいずれも信頼することができない。したがって、1つの形状パラメータに基づく分類手順の性能は不満足なものとなる。
− 多くの場合に、実験データから得られるヒストグラム(すなわち経験分布)を、「最適適合」を見付けるために或る範囲のモデル分布と比較すると、データに等しく良好に(又は等しく不良に)一致するモデルがいくつか出てくる。明らかに、このような本質的な曖昧さは分類の信頼性を高めることができない。
− かなりの数の統計モデルが想定され得るが、所与の実験データの組の特徴付けにより有用である可能性がある無限数の他の許容可能な分布が依然としてある。例えば、M1及びM2の2つが主要なモデル分布である場合、確率がηであるM1及び確率が(1−η)であるM2を選択することによって、新たな「ランダム化混合」モデルを構築することができる。明らかに、結果として得られるモデルは、2つの基礎となるモデルのいずれでも適切に表現することができない。
【0019】
モデル分布の形状を特徴付けるために、その解析形状に関係なく、様々な「形状パラメータ」が導入されている。例えば、変動電力の分布の歪度を測定するために、中央値に対する平均値の比を使用することが知られている。2つの渦モデルについて言えば、α=1及びα=2である場合、それぞれの比は1.44及び1.18となる。平均値の中央値に対する比は、いかなるスケールパラメータにも依存しないことを指摘しておく。
【0020】
数理統計学では、確率分布の歪度及び尖度(すなわち平坦さの尺度)に関連するγ1及びγ2の2つのパラメータも広く用いられている。2つのパラメータγ1及びγ2の実際の推定値は、検討中の分布のより高次のサンプルモーメントに基づく。{x1,x2,...xN}がN個の観測値の組である場合、γ1及びγ2の推定値は次式から求めることができる。
【0021】
【数3】
【0022】
ただし、
【0023】
【数4】
【0024】
である。ガウス分布の特別な場合、γ1=0且つγ2=0である。
【0025】
パラメータγ1及びγ2、又はこれらに機能的に関連するいくつかの他のパラメータは統計学の文献に頻繁に登場する。しかし、それらの、複雑な人工物から反射された電力に関する実験データの処理への適用性は、主に以下の3つの理由から限られている。
− 観測される電力のサンプルは常に負でない値であり、よって一般に、基礎となる分布は右側に歪む。しかし、このような事前情報は歪度パラメータγ1に組み込まれていない。
− 観測される電力のサンプル数が少ないか又は中程度(例えば1000未満)である場合、γ1及びγ2の推定値に関連する統計誤差は非常に大きく、物体の分類は信頼できない。
− 一般に、サンプルモーメントに基づく統計量は「ロバスト」でない。すなわち、それらの結果として生じる値は、異常に大きな又は小さな値を有する比較的少数の観測値(いわゆる「外れ値」)によって大きな影響を受ける可能性がある。
【0026】
したがって、特に後方散乱電磁波エネルギーの解析に基づいて実体を分類する目的で、ランダムに変動する電力又は強度の統計分布の情報性の高い形状記述子を求める改良された方法及び装置を提供することが望ましい。
【0027】
[発明の概要]
本発明の態様を添付の特許請求の範囲に記載する。
【0028】
本発明のさらなる態様によれば、正の対象観測量(observable)(例えば物体から反射される信号の電力又は強度)のN個のサンプルの組{x}={x1,x2,...,xN}を得、この一次組の各値xj(j=1,2,...,N)に対数変換を適用して、対応する値zj(ここでzj=ln xj)を生成する。その結果、一次組{x}は、結果として得られる二次組{z}={z1,z2,...,zN}により一意に表現される。xjの値は正にしかなり得ず、zjの値は正にも負にもなり得ることを指摘しておく。
【0029】
zj(j=1,2,...,N)の値を昇順又は降順に並べ替える。昇順が選択されている場合、ソート手順は、次のように並べられた二次組を生じることになる。
z(1)≦z(2)≦...≦z(N)
次に、二次組を用いて、一次組{x}の3つの記述子を次のように求める。
1.次式によって定義される中央値M
Nが奇数である場合、M=z([N+1]/2)
又は
Nが偶数である場合、M=0.5[z(N/2)+z([N/2]+1)]
Mの数値は、二次組{z}の「中心」値('central' value)を表すが、対数関数は単調であるため、一次組{x}の「中心」値はちょうどexp(M)となる。
2.次式によって定義される中央値マイナス平均値(median-minus-mean)L
【0030】
【数5】
【0031】
3.代表値からの平均(絶対)偏差D。(ここで、「代表値」という用語は、一組の値の中央値、平均値又は最頻値をカバーするように広範に意図される。)したがって、Dは、中央値からの偏差を表し得る。すなわち、
【0032】
【数6】
【0033】
であり、ここで、Mは中央値である。
【0034】
代替的に、記述子Dは、平均値からの平均偏差であってもよく、その場合、次式で表される。
【0035】
【数7】
【0036】
簡単な計算で得ることができる上記の3つの記述子M、L及びDは、集合的に、多くのクラスの正のランダム観測量、特に複雑な物体により後方散乱される電磁波の変動強度に対して優れた判別子を提供することが分かった。
【0037】
中央値Mは、一次組{x}の「中心」値に関連し、基礎となる統計モデルの形状に関する情報を含まないが、残りの2つの記述子L及びDは、スケールに対して不変であり、一緒になって、情報性の高い形状特性を提供する。したがって、物体は、記述子L及びDを用いて、Mを用いずに表現(及び分類)することができる。しかし、中央値Mの使用は、対象物によって反射される信号の代表レベルを求める上で有利であり得るため、それが有用である状況で(例えば、形状は同様であるがサイズの異なる物体の区別を助けるため、又は、物体の範囲のような補助情報を提供するために)用いられてもよい。
【0038】
本発明により構築される「D−L平面」又は「D−L領域」により提供される利点の理解は、図3を検証することによって高めることができる。図3は、変動する電力又は強度のような正の観測量の多くの既知の統計モデルの相対的な位置を示す。
【0039】
各モデルは別個の曲線で表され、選択された曲線上の各点は、形状記述子D及びLという2つの特定の値に対応する。例えば、「ガンマ」と記された曲線は、ガンマモデルが「サポート」することのできるD及びLの値の全ての可能な対を表す。特に、2つの渦モデルはそれぞれ、固有の座標対を有する点により表され、これらの点の一方(α=1の場合)は指数分布に相当する。
【0040】
D−L平面の特性、及び一次組{x}の視覚化された統計モデルの特性は、以下のように要約することができる。
− 原点(D=0及びL=0)は、変動のないデルタ関数δ[x−exp(M)]に「縮退した(degenerated)」分布p(x)を表し、表示する各分布は、スズキ及びK分布を除き、その分散が0に近づくにつれてこの点に向かう。
− 正の軸(D>0及びL=0)は、xの対数正規分布を表し、対数変換z=ln x後にzのガウス分布となる。ガウス分布は対称であることが知られており、その平均値及び中央値は同じ点で一致する。よってL=0である。
− 線L=gD(ここでg≒0.21)はワイブル分布を表す。ワイブルのランダム変数Wは、指数のランダム変数Vから、変換W=Vεを適用することによって得ることができ、ここで、0<ε≦1はパラメータである。対数変換後、εはスケールパラメータとなり、ε=1についてW≡Vであるため、線L=gDは、指数分布を表す点を通らなければならない。
− スズキのランダム変数とK分布のランダム変数はともに、指数のランダム変数から、そのスケールをランダムに「調節」することによって導出する。したがって、これらの分布はそれぞれ、ランダムな調節の分散が0に向かうにつれて、指数分布に近づくことになる。これら2つの分布はいずれも、指数分布の値よりも低い記述子Dの値に達することができないことに留意すべきである。
− 統計的通信(statistical communications)では、ある1つの別個の定数成分の寄与を、重要度の等しい複数のランダム成分の寄与と組み合わせたモデルによって生成される、観測量を特徴付けるためにライス分布を用いる。例えば、ライス分布を、1つの主要な反射体と、複数のより小さな散乱体とを含む物体によって後方散乱される電力のモデルとして用いる。D−L平面において、ライス分布は、別個の成分の寄与が徐々に減少し、そのうち他の全ての成分の寄与と同程度になるにつれて、指数分布を表す点に近づく。一方、別個の成分の寄与がますます支配的になると、ライス分布は原点(D=0及びL=0)に近づく。ライス分布は、指数分布の値よりも大きい記述子Dの値に達することができないことに留意すべきである。
【0041】
D−L領域において指数分布が果たす「中心点」の役割は単純に、指数分布が数理統計学において傑出していることを反映する。
【0042】
次に、本発明を具現する構成を例として、添付図面を参照して説明する。
【0043】
[好適な実施形態の詳細な説明]
図4は、本発明による分類システムを、本発明を有効に使用することができる可能な監視シナリオの一例において示す。未知のクラスの陸上車両VHが、例えば道路によって物理的に画定される所定の軌道TRに沿って移動している。マイクロ波陸上車両センサGVSが、電磁波エネルギーパルスを使用して、監視領域に照射を行う。次に、この領域によって後方散乱される信号の電力特性を解析することによって、陸上車両センサGVSが車両を検出し、検出された車両が属する可能性が最も高いクラスに関して判定を行う。
【0044】
センサGVSは、車両の有無の判定に用いられる検出信号DETと、車両の分類に用いられる記述子を含む記述子信号DECとを出力する。
【0045】
これらの信号を車両検出器/分類器CLAにより受信する。検出信号DETを判定ブロックDBに送って車両の有無を判定し、この判定の結果をディスプレイDISに送る。スイッチSWを訓練モード位置にセットした状態で示す。この位置では、記述子信号DECを記述子ストア(store)DSに送る。代替的に、スイッチSWは認識モード位置にセットすることもできる。この位置では、記述子信号を比較器CMPに送って、それぞれ異なる物体カテゴリに関連付けられた記述子の集合と次々に比較し、記述子ストアDSに記憶する。比較の結果をディスプレイDISに表示する。
【0046】
よって、図示のシステムは、特定のカテゴリの車両を認識するように訓練される機能を有する。統計モデルの訓練に通常用いられる様々な技法を使用することができる。例えば、記述子ストアDSに記憶されるデータは、各カテゴリの車両の複数の測定値の統計解析から導出することができる。記憶されるデータはそれぞれのカテゴリのテンプレートを表すことができ、認識手順は、例えば分類すべき物体の記述子を表す多次元空間の点と、オブジェクトカテゴリを表す点との間の距離を計算することによって、新たに取得されたデータをこれらのテンプレートと照合することを伴い得る。代替的に、ニューラルネットワーク技法を用いることもでき、その場合、訓練中に導出された記述子が(自明の方法で)用いられ、ニューロンの重みを導出する。
【0047】
車両の検出及び分類という要求される機能を実施するために、陸上車両センサGVSは、適切な送信アンテナTAを駆動するマイクロ波パルス送信機TXと、受信機RXに接続された受信アンテナRAと、制御ユニットCRLと、マルチプレクサMPXと、複数の記述子プロセッサMDL1、...、MDLKと、出力回路OPCとを備える。
【0048】
陸上車両センサGVSは、図4に示されるように、公称「ルック」角θk及び角度範囲ΔΘをそれぞれ特徴とするK個の視野FOV1、...、FOVk、...、FOVKを使用する。センサ装置は、送信機TX及び送信アンテナTAにより送信され、各視野FOV内の移動車両によって反射されたエネルギーパルスを受信アンテナ及び受信機RXにより捕捉するように動作するように構成される。
【0049】
図4に示すシナリオでは、車両が所定の経路に沿って移動しているため、アスペクト角は連続的に変化し、車両によって反射されるパルスの電力は不規則に変動する。質問パルスの間隔が短すぎて、反射パルスの非相関性を得ることができない場合、上述のように、周波数機敏性をさらに使用することが有利である場合がある。付加的に、又は代替的に、質問信号の偏波を変化させてもよい。
【0050】
図4の陸上車両センサGVSは、センサの視野FOV1、...、FOVK及び車両の速度によって決まるK個の観測間隔中に車両によって反射されたパルスを捕捉する。捕捉されるパルスの実際の数もまた、監視領域に照射される送信パルスの繰り返し数に依存することになる。受信機RXは、K組の値を作成し、各組は、選択された視野FOV内を移動する車両によって反射された各パルスの電力の値{x1,x2,...,xN}を含む。
【0051】
次に、各視野FOV内の監視領域から反射されたパルスの各組を、マルチプレクサMPXによって、記述子プロセッサMDL1、...、MDLKの各々に送出して処理し、3つの記述子M、D及びLの値を求める。次に、出力回路OPCによって中央値M1、M2、...、MKを収集して検出信号DETを生成し、分類器CLAが監視領域内の車両の有無に関して判定を行うことを可能にする。次に、出力回路OPCによって3つの記述子の全ての値M1、D1、L1、M2、D2、L2、...、MK、DK及びLKを収集し、記述子信号DECとして適切な形式で供給する。この信号は、分類器が、検出された車両が属する可能性が最も高いクラスに関して判定を行うために使用する。
【0052】
図5は、本発明により動作するように構成されたデジタル記述子プロセッサ(MDLP)のブロック図である。記述子プロセッサMDL1、...、MDLKの各々がこのプロセッサMDLPに対応する構造を有しても、単一のプロセッサMDLPを連続的に用いて複数のプロセッサMDL1、...、MDLKの機能を果たしてもよい。
【0053】
プロセッサMDLPは、対数アナログ/デジタル変換器LGADCと、ソータSRTと、制御・タイミングユニットCTUと、サンプルカウンタCNRと、メモリMEMと、3つのバッファMBF、DBF及びLBFと、補数値(complement-value)回路CMPと、加算器SUMと、絶対値回路ABSと、2つの累算器AC1及びAC2とを備える。
【0054】
電力又は強度のような対象観測量を表す正の入力信号x(t)の値を変換器LGADCにより、ユニットCTUが供給するクロックパルスCLによって決められた時刻においてデジタル形式に変換する。その結果、変換器LGADCの出力Zはデジタルワードシーケンス(sequence of digital words)を生成する。各デジタルワードは、tjにおいて取得されたx(t)のサンプルの対数zjを表す。よってzj=ln x(tj)である。
【0055】
プロセッサMDLP(バッチ処理モードで動作する)が処理すべき事前に選択された数Nの入力サンプルを求めるために、ユニットCTUは適切なサンプルカウンタCNRを使用する。プロセッサMDLPの動作は2つのサイクル、すなわち、ソート(SORT)サイクルとそれに続く計算(COMPUTE)サイクルを含む。これら2つのサイクルはそれぞれ、プロセッサMDLPの正確な動作に必要な全てのタイミング信号及び制御信号を生成するユニットCTUにより開始され、また終了される。
【0056】
ユニットCTUは、入力SBを介してソータSRTに「イネーブルコマンド」を送ることによってソートサイクルを開始する。ソータSRTは、変換器LGADCからデジタルワードzjを受信する。ソータSRTは、受信したデジタルワードを昇順又は降順に並べ替える。この目的で、ソータSRTには、2つのバス、すなわちアドレスバスASと書き込み/読み取りバスWRを有するメモリMEMを使用する。ソータSRTは、当業者によく知られた多くのソートアルゴリズムのいずれかを実施することができる。
【0057】
事前に選択された数Nの入力サンプルをカウンタCNRが記録するとすぐに、ユニットCTUは、入力SBを介してソータSRTをディセーブルすることによってソートサイクルを終了する。次に、ユニットCTUは、共通入力RAを介して累算器AC1及びAC2をリセットすることによって計算サイクルを開始する。ユニットCTUはまた、バッファMBFの「ロード」入力を駆動する適切な信号を出力LMにおいて生成することによって、メモリMEMからバッファMBFに中央値をロードする。バッファMBFの「データ」入力MEは、N個の入力サンプルの組の中央値を含む所定のメモリセルに接続される。さらなる計算を回避するために、処理されるサンプルの数Nは奇数となることが好ましい。
【0058】
計算サイクル中に、ユニットCTUは、サンプルカウンタCNRを使用して、メモリMEMのアドレスバスに接続された出力AGにおいて適切なアドレスシーケンスを生成する。結果として、メモリMEMに記憶される全ての値zjが、補数値回路CMPに接続された読み取り出力ROに順次現れる。回路CMPの目的は、メモリMEMが供給するデジタルワードの符号を逆にすることである。
【0059】
加算器SUMは、2つの入力値、すなわち、入力S1において中央値Mを、入力S2において逆極性のサンプル −zjを受け取る。したがって、加算器SUMは、和(M−zj)を表す値を出力SSにおいて生成し、絶対値回路ABSを用いて、対応する大きさ|M−zj|を得る。したがって、累算器AC1及びAC2はそれぞれ以下の総和の値を求める。
【0060】
【数8】
【0061】
累算器の動作のタイミングは、ユニットCTUが共通クロック入力CAを介して供給する適切なクロックパルスにより管理する。
【0062】
メモリMEMに記憶されていた全てのサンプルを使い果たしたら、累算器AC1及びAC2の内容を、ユニットCTUが供給する適切な信号によって決められた時刻においてそれぞれのバッファDBF及びLBFに転送し、これらのバッファの共通「ロード」入力LBを駆動する。したがって、計算サイクルの終了時に、MDLプロセッサの出力M、D及びLは、処理された入力サンプル組を特徴付ける記述子M、D及びLを表す値を供給する。必要であれば、記述子D及びLの値を、例えば単純に、それぞれの二値表現の適切に選択された数の最上位ビットを使用することによって正規化することができる。
【0063】
上記の構成では、さらなる処理に使用される入力信号x(t)からサンプルが一組だけ取得されるものと仮定する。したがって、計算サイクル中、ソータSRTはアイドル状態であり続ける。しかし、2つのメモリを使用して、その一方をソート目的にのみ使用し、他方が計算サイクルで使用されるソート済の値を記憶することによって、連続動作を達成することができる。このような変更された構成を使用する場合、ソートと計算という2つのサイクルを同時に実行することができる。すなわち、ソート済のサンプル組が計算に使用されている間に、ソータが新たな入力サンプルシーケンスを適切に並べ替える。
【0064】
上述の実施形態は、観測角又は視野FOV毎に一組の記述子を導出することによって機能する。複数組の記述子を分類目的に用いる。しかし、代替的な技法も可能である。例えば、本システムは、全視野にわたって取得したサンプルから一組の記述子を導出し、この一組を分類目的に使用するように構成することもできる。この場合、一組の記述子は、1つの視点から観察される形状のみでなく、物体の全体的な構成に大きく影響を受ける。
【0065】
状況に応じて、1つの観測角から導出される一組の記述子を分類目的に使用することも可能である。
【0066】
記載した実施形態において、処理される信号は質問信号の反射である。しかし、必ずしもこれに限られるものではない。例えば、処理される信号は、音波、例えば、対象物により生成される音響信号、又は別個の発生源(例えば周囲光)からの波の反射であってもよい。
【0067】
本発明は、物体の分類だけでなく、多くの分野に応用可能である。本発明は、通信信号を監視して干渉やシャドウイングにより生じる伝搬誤差を検出するか、又は、海面反射若しくは地上反射(land clutter)又は気象条件を検出するため、又は、色又はテクスチャを表す信号を用いた分類のために使用することができる。特に有用な種類の応用は、帰無仮説を用いて機能する。すなわち、本システムは、正常な状況(例えば、海面反射を表す信号)の分類を表すデータを記憶し、受信した信号が(例えば船や人物のような物体の存在による)その状況とのずれを表す場合を判定し、この判定に応答して検出信号を生成するように構成される。したがって、分類プロセスは単純な二値のはい/いいえ(yes/no)判定となる。
【0068】
図4及び図5を参照して説明した実施形態は、ハードウェアにおいて完全に具現することができ、その場合、当業者は、様々なブロックの必要な機能を実施するための適切な詳細に渡る回路構成を容易に設計及び構築することができる。別法として、これらの機能の一部を、サンプル値を受信してそこから記述子を導出する適切にプログラムされた汎用コンピュータ又は専用コンピュータを用いてソフトウェアにおいて行ってもよい。したがって、本発明は、そのようなプログラムされたコンピュータ、及びコンピュータをそのような方法で動作させるように構成されたコンピュータプログラム、並びにそのようなプログラムを保持するプログラムキャリアに適用される。一般に、本発明は、その構成方法に関係なく、信号処理装置に適用される。
【0069】
対数変換を実施する場合、自明の様々な技法を実行することができる。結果が対数変換を少なくとも近似する限り、結果が完全に正確であることは重要でない。
【0070】
上記の、本発明の好適な実施形態の説明は、例示及び説明のために提示してきた。説明が網羅的であること、又は、本発明を開示した形態そのものに限定すること、は意図していない。上記の説明に鑑みて、当業者は、多くの改変、変更、及び変形により、本発明を意図する特定の用途に適した様々な実施形態で使用することができることは明らかである。
【図面の簡単な説明】
【0071】
【図1】回転台上で回転する車両に電磁波エネルギーパルスを照射して車両の後方散乱特性を求める仮想の実験の概略図である。
【図2】2つの渦モデルを表す確率密度関数を示す図である。
【図3】本発明により構築される、変動する電力又は強度等のような正の観測量の多くの既知の統計モデルの相対的な位置を視覚化する「D−L領域」を示す図である。
【図4】本発明による分類システムを示す図である。
【図5】図4のシステム内で使用されるデジタルプロセッサのブロック図である。
【特許請求の範囲】
【請求項1】
実体の表現方法であって、
前記実体からの信号を繰り返しサンプリングすることであって、それによって、前記受信信号の強度にそれぞれ依存する第1の組の値を得る、信号を繰り返しサンプリングすることと、
前記サンプル値に対数変換を適用することであって、それによって、第2の組の値を得る、対数変換を適用することと、
一組の記述子の値を導出することであって、前記組は、前記第2の組の値の平均値と中央値の差を表す第1の記述子の値(L)と、前記第2の組の値の各々と前記第2の組の値の代表値との間の偏差の絶対値の平均値を表す第2の記述子の値(D)とを少なくとも含む、一組の記述子の値を導出することと
を含む、実体の表現方法。
【請求項2】
前記一組の記述子の値は、前記第2の組の中央値(M)をさらに含む請求項1に記載の実体の表現方法。
【請求項3】
前記実体が観測位置に対して複数の異なるアスペクト角を持つ場合に前記繰り返しサンプリングする動作を行うことを含む請求項1又は請求項2に記載の実体の表現方法。
【請求項4】
記述子の値の複数の組を導出するステップであって、前記組の各々は異なるアスペクト角に関連付けられる、記述子の値の複数の組を導出するステップを含む請求項3に記載の実体の表現方法。
【請求項5】
一組の記述子の値を導出するステップであって、前記記述子の各々は複数の異なるアスペクト角において取得されたサンプルから導出される、一組の記述子の値を導出するステップを含む請求項3に記載の実体の表現方法。
【請求項6】
前記第2の組の値の代表値は、前記第2の組の平均値である請求項1〜5のいずれか一項に記載の実体の表現方法。
【請求項7】
前記第2の組の値の代表値は、前記第2の組の中央値である請求項1〜5のいずれか一項に記載の実体の表現方法。
【請求項8】
質問信号を生成及び送信するステップを含み、前記物体からの信号は、前記質問信号の反射である請求項1〜7のいずれか一項に記載の実体の表現方法。
【請求項9】
前記質問信号は、電磁信号である請求項8に記載の実体の表現方法。
【請求項10】
前記質問信号は、変動する偏光を有する請求項9に記載の実体の表現方法。
【請求項11】
前記質問信号は、音響信号である請求項8に記載の実体の表現方法。
【請求項12】
前記質問信号は、変動する周波数を有する請求項8〜11のいずれか一項に記載の実体の表現方法。
【請求項13】
請求項1〜12のいずれか一項に記載の方法を用いて前記実体を表現することと、
前記導出した記述子を用いて前記実体を分類することと
を含む、実体の分類方法。
【請求項14】
前記実体は、前記記述子を、複数のデータ集合を含むストアの内容と比較することによって分類され、
各集合は、それぞれのカテゴリの実体を用いた訓練動作によって生成された前記記述子から導出されている請求項13に記載の実体の分類方法。
【請求項15】
前記記述子がもはや、正常な状況を表す分類に適合しない場合を検出し、前記検出に応答して検出信号を生成するステップを含む請求項13に記載の実体の分類方法。
【請求項16】
実体表現のストアを確立する方法であって、
(i)請求項1〜12のいずれか一項に記載の方法を用いることであって、それによって、第1のカテゴリの実体を表す記述子を導出する、請求項1〜12のいずれか一項に記載の方法を用いることと、
(ii)前記記述子から導出されたデータ集合を記憶することと、
(iii)他のカテゴリの実体について前記ステップ(i)及び(ii)を繰り返すことと
を含む、実体表現のストアを確立する方法。
【請求項17】
請求項1〜12のいずれか一項に記載の方法を用いて動作するように構成される、実体の表現を生成する装置。
【請求項18】
請求項13〜15のいずれか一項に記載の方法を用いて動作するように構成される、実体の分類装置。
【請求項19】
実体から受信した信号をサンプリングすることによって得られた第1の組の値から前記実体を表現する一組の記述子を導出するように構成されるコンピュータプログラムであって、
前記第1の組の値に対数変換を適用することによって前記第1の組の値を第2の組の値に変換することと、
前記第2の組の値の平均値と中央値の差を表す第1の記述子の値(L)を導出することと、
前記第2の組の値の各々と前記第2の組の値の代表値との間の偏差の絶対値の平均値を表す第2の記述子の値(D)を導出することと
のために構成されるコンピュータプログラム。
【請求項20】
実体から受信した信号をサンプリングすることによって得られた第1の組の値に応答し、かつ、前記実体を表現する一組の記述子を導出するように構成される、信号処理装置であって、
前記第1の組の値に対数変換を適用することによって前記第1の組の値を第2の組の値に変換することと、
前記第2の組の値の平均値と中央値の差を表す第1の記述子の値(L)を導出することと、
前記第2の組の値の各々と前記第2の組の値の代表値との間の偏差の絶対値の平均値を表す第2の記述子の値(D)を導出することと
のために構成される信号処理装置。
【請求項1】
実体の表現方法であって、
前記実体からの信号を繰り返しサンプリングすることであって、それによって、前記受信信号の強度にそれぞれ依存する第1の組の値を得る、信号を繰り返しサンプリングすることと、
前記サンプル値に対数変換を適用することであって、それによって、第2の組の値を得る、対数変換を適用することと、
一組の記述子の値を導出することであって、前記組は、前記第2の組の値の平均値と中央値の差を表す第1の記述子の値(L)と、前記第2の組の値の各々と前記第2の組の値の代表値との間の偏差の絶対値の平均値を表す第2の記述子の値(D)とを少なくとも含む、一組の記述子の値を導出することと
を含む、実体の表現方法。
【請求項2】
前記一組の記述子の値は、前記第2の組の中央値(M)をさらに含む請求項1に記載の実体の表現方法。
【請求項3】
前記実体が観測位置に対して複数の異なるアスペクト角を持つ場合に前記繰り返しサンプリングする動作を行うことを含む請求項1又は請求項2に記載の実体の表現方法。
【請求項4】
記述子の値の複数の組を導出するステップであって、前記組の各々は異なるアスペクト角に関連付けられる、記述子の値の複数の組を導出するステップを含む請求項3に記載の実体の表現方法。
【請求項5】
一組の記述子の値を導出するステップであって、前記記述子の各々は複数の異なるアスペクト角において取得されたサンプルから導出される、一組の記述子の値を導出するステップを含む請求項3に記載の実体の表現方法。
【請求項6】
前記第2の組の値の代表値は、前記第2の組の平均値である請求項1〜5のいずれか一項に記載の実体の表現方法。
【請求項7】
前記第2の組の値の代表値は、前記第2の組の中央値である請求項1〜5のいずれか一項に記載の実体の表現方法。
【請求項8】
質問信号を生成及び送信するステップを含み、前記物体からの信号は、前記質問信号の反射である請求項1〜7のいずれか一項に記載の実体の表現方法。
【請求項9】
前記質問信号は、電磁信号である請求項8に記載の実体の表現方法。
【請求項10】
前記質問信号は、変動する偏光を有する請求項9に記載の実体の表現方法。
【請求項11】
前記質問信号は、音響信号である請求項8に記載の実体の表現方法。
【請求項12】
前記質問信号は、変動する周波数を有する請求項8〜11のいずれか一項に記載の実体の表現方法。
【請求項13】
請求項1〜12のいずれか一項に記載の方法を用いて前記実体を表現することと、
前記導出した記述子を用いて前記実体を分類することと
を含む、実体の分類方法。
【請求項14】
前記実体は、前記記述子を、複数のデータ集合を含むストアの内容と比較することによって分類され、
各集合は、それぞれのカテゴリの実体を用いた訓練動作によって生成された前記記述子から導出されている請求項13に記載の実体の分類方法。
【請求項15】
前記記述子がもはや、正常な状況を表す分類に適合しない場合を検出し、前記検出に応答して検出信号を生成するステップを含む請求項13に記載の実体の分類方法。
【請求項16】
実体表現のストアを確立する方法であって、
(i)請求項1〜12のいずれか一項に記載の方法を用いることであって、それによって、第1のカテゴリの実体を表す記述子を導出する、請求項1〜12のいずれか一項に記載の方法を用いることと、
(ii)前記記述子から導出されたデータ集合を記憶することと、
(iii)他のカテゴリの実体について前記ステップ(i)及び(ii)を繰り返すことと
を含む、実体表現のストアを確立する方法。
【請求項17】
請求項1〜12のいずれか一項に記載の方法を用いて動作するように構成される、実体の表現を生成する装置。
【請求項18】
請求項13〜15のいずれか一項に記載の方法を用いて動作するように構成される、実体の分類装置。
【請求項19】
実体から受信した信号をサンプリングすることによって得られた第1の組の値から前記実体を表現する一組の記述子を導出するように構成されるコンピュータプログラムであって、
前記第1の組の値に対数変換を適用することによって前記第1の組の値を第2の組の値に変換することと、
前記第2の組の値の平均値と中央値の差を表す第1の記述子の値(L)を導出することと、
前記第2の組の値の各々と前記第2の組の値の代表値との間の偏差の絶対値の平均値を表す第2の記述子の値(D)を導出することと
のために構成されるコンピュータプログラム。
【請求項20】
実体から受信した信号をサンプリングすることによって得られた第1の組の値に応答し、かつ、前記実体を表現する一組の記述子を導出するように構成される、信号処理装置であって、
前記第1の組の値に対数変換を適用することによって前記第1の組の値を第2の組の値に変換することと、
前記第2の組の値の平均値と中央値の差を表す第1の記述子の値(L)を導出することと、
前記第2の組の値の各々と前記第2の組の値の代表値との間の偏差の絶対値の平均値を表す第2の記述子の値(D)を導出することと
のために構成される信号処理装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2006−119131(P2006−119131A)
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【外国語出願】
【出願番号】特願2005−278246(P2005−278246)
【出願日】平成17年9月26日(2005.9.26)
【出願人】(501253316)ミツビシ・エレクトリック・インフォメイション・テクノロジー・センター・ヨーロッパ・ビーヴィ (77)
【氏名又は名称原語表記】MITSUBISHI ELECRIC INFORMATION TECHNOLOGY CENTRE EUROPE B.V.
【住所又は居所原語表記】20 Frederick Sanger Road, The Surrey Research Park, Guildford, Surrey GU2 5YD, Great Britain
【Fターム(参考)】
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【出願番号】特願2005−278246(P2005−278246)
【出願日】平成17年9月26日(2005.9.26)
【出願人】(501253316)ミツビシ・エレクトリック・インフォメイション・テクノロジー・センター・ヨーロッパ・ビーヴィ (77)
【氏名又は名称原語表記】MITSUBISHI ELECRIC INFORMATION TECHNOLOGY CENTRE EUROPE B.V.
【住所又は居所原語表記】20 Frederick Sanger Road, The Surrey Research Park, Guildford, Surrey GU2 5YD, Great Britain
【Fターム(参考)】
[ Back to top ]