
実装システム、電子部品の実装方法、基板の製造方法及びプログラム

【課題】実装装置による電子部品の実装の担当が変更された場合に、検査装置による検査結果を正確に実装装置にフィードバックすることができる実装システム等の技術を提供する。
【解決手段】複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、どの電子部品を前記基板上に実装するのかを示す分担情報と、複数の電子部品が実装された前記基板を検査する検査装置によって、前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す情報であるずれ量の情報より、前記実装装置による実装の担当の変更に応じて、基板に対応する分担情報を変更し、前記複数の実装装置のうち、前記分担情報に基づいて変更、実装した前記実装装置に、前記電子部品のずれ量を修正して、前記基板上に前記電子部品を実装させる。
【解決手段】複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、どの電子部品を前記基板上に実装するのかを示す分担情報と、複数の電子部品が実装された前記基板を検査する検査装置によって、前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す情報であるずれ量の情報より、前記実装装置による実装の担当の変更に応じて、基板に対応する分担情報を変更し、前記複数の実装装置のうち、前記分担情報に基づいて変更、実装した前記実装装置に、前記電子部品のずれ量を修正して、前記基板上に前記電子部品を実装させる。
【発明の詳細な説明】
【技術分野】
【0001】
本技術は、基板上に電子部品を実装する実装システム等の技術に関する。
【背景技術】
【0002】
従来から、基板上に半田を印刷する半田印刷装置、基板上に電子部品を実装する実装装置、電子部品が実装された基板をリフロー処理するリフロー装置等が一列に配置されて構成された実装システムが知られている(例えば、特許文献1参照)。
【0003】
この種の実装システムでは、一般的に、装置毎に、その装置の下流側に基板を検査する検査装置が設けられる。処理不良が検出された場合には、検査結果が検査装置からフィードバックされ、次の基板の処理に反映される。
【0004】
近年においては、実装タクトの向上のために、複数の実装装置が一列に連結される場合がある(例えば、特許文献2参照)。このような実装装置では、実装効率の向上等を目的として、例えば、特定の実装装置で電子部品の位置ずれ等のエラーなどが発生した場合に、他の実装装置にその電子部品の実装を担当させる等の処理が実行される。すなわち、どの実装装置がどの電子部品の実装を担当するのかが変更される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−134998号公報
【特許文献2】特開2001−230598号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
実装装置による電子部品の実装の担当の変更は、頻繁に発生する場合がある。電子部品の実装の担当が変更された場合、検査装置による検査結果が正確に実装装置にフィードバックできない場合があるといった問題がある。
【0007】
以上のような事情に鑑み、本技術の目的は、実装装置による電子部品の実装の担当が変更された場合に、検査装置による検査結果を正確に実装装置にフィードバックすることができる実装システム等の技術を提供することにある。
【課題を解決するための手段】
【0008】
本技術の一形態に係る実装システムは、記憶部と、制御部とを具備する。
前記記憶部は、基板毎の複数のフォーマットを記憶する。
前記複数のフォーマットは、実装装置の分担情報と、電子部品のずれ量の情報とをそれぞれ有する。
前記実装装置の分担情報は、複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す情報である。
前記電子部品のずれ量の情報は、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す情報である。
前記制御部は、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる。
【0009】
この実装システムでは、実装装置の分担情報と、電子部品のずれ量の情報とを有するフォーマットが基板毎に用意されている。これにより、この実装システムは、基板毎に、各電子部品の実装を担当する実装装置と、各電子部品のずれ量とを認識することができる。
【0010】
そして、実装装置による電子部品の実装の担当の変更があった場合には、制御部により、実装の担当が変更された基板に対応するフォーマットについて、分担情報が変更される。これにより、基板毎に、リアルタイムで実装の担当の変更に追従することができる。従って、複数の実装装置のうち、電子部品をずれた位置に実装した実装装置に対して、正確にずれ量の情報(検査装置による検査結果)をフィードバックすることができる。電子部品をずれた位置に実装した実装装置は、フォーマットの電子部品のずれ量に基づいて、電子部品の位置ずれを修正することができる。
【0011】
上記実装システムにおいて、前記電子部品のずれ量の情報は、複数の検査装置によって分担して検査されてもよい。
この場合、前記フォーマットは、前記複数の検査装置が、それぞれ、前記複数の電子部品のうちどの前記電子部品を検査するのかを示す検査装置の分担情報をさらに有していてもよい。
この場合、前記制御部は、前記検査装置による前記電子部品の検査の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記検査装置の分担情報を変更してもよい。
【0012】
これにより、検査装置による電子部品の検査の担当の変更に柔軟に対応することができる。
【0013】
上記実装システムにおいて、前記フォーマットは、前記電子部品が実装される前記基板上の位置に半田を形成する半田形成装置によって前記半田が形成された前記基板を検査する半田検査装置により検査され、前記半田形成装置により前記基板上に形成された半田が正規の位置からどの程度ずれたかを示す半田のずれ量の情報をさらに有していてもよい。
この場合、前記制御部は、前記半田形成装置に、前記フォーマットの前記半田のずれ量の情報に基づいて、前記半田の形成位置を修正させてもよい。
【0014】
この実装システムでは、半田の位置ずれが発生した場合に、半田の形成位置を適切に修正させることができる。
【0015】
上記実装システムにおいて、前記制御部は、前記複数の実装装置に、それぞれ、前記半田のずれ量の情報に基づいて、正規の位置からずれた位置に形成された前記半田上に前記電子部品を実装させてもよい。
【0016】
この実装システムでは、半田の位置ずれが発生した場合に、位置がずれた半田上に正確に電子部品を実装することができる。なお、半田の位置ずれが小さい場合には、位置がずれた半田上に電子部品を実装しても問題ない場合が多い。
【0017】
本技術の一形態に係る電子部品の実装方法は、複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更することを含む。
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる。
【0018】
本技術の一形態に係る基板の製造方法は、複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更することを含む。
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる。
【0019】
本技術の一形態に係るプログラムは、コンピュータに、
複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更するステップと、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させるステップとを実行させる。
【発明の効果】
【0020】
以上のように、本技術によれば、実装装置による電子部品の実装の担当が変更された場合に、検査装置による検査結果を正確に実装装置にフィードバックすることができる実装システム等の技術を提供することができる。
【図面の簡単な説明】
【0021】
【図1】本技術の一実施形態に係る実装システムを示す図である。
【図2】本技術の一実施形態に係る実装システムの電気的な構成を示す図である。
【図3】本技術の一実施形態に係る実装システムで用いられるフォーマットの一例を示す図である。
【図4】本技術の一実施形態に係る実装システムの動作を示すシーケンス図である。
【図5】実装システムの処理を説明するための補足図であり、ある特定の時間での基板の位置を示す図である。
【図6】本技術の一実施形態に係る実装システムの処理を説明するための補足図であり、ある特定の時間での基板の位置を示す図である。
【図7】本技術の一実施形態に係る実装システムの処理を説明するための補足図であり、図6と同じ時刻での基板毎のフォーマットの一例を示す図である。
【図8】本技術の一実施形態に係る実装システムの処理を説明するための補足図であり、ある特定の時間での基板の位置を示す図である。
【図9】本技術の一実施形態に係る実装システムの処理を説明するための補足図であり、図8と同じ時刻での基板毎のフォーマットの一例を示す図である。
【図10】本技術の一実施形態に係る実装システムの処理を説明するための補足図であり、ある特定の時間での基板の位置を示す図である。
【図11】本技術の一実施形態に係る実装システムの処理を説明するための補足図であり、図10と同じ時刻での基板毎のフォーマットの一例を示す図である。
【図12】本技術の他の実施形態に係る実装システムを示す図である。
【図13】他の実施形態に係る実装システムで用いられるフォーマットの一例を示す図である。
【図14】他の実施形態に係る実装システムの処理を示すシーケンス図である。
【図15】他の実施形態に係る実装システムの処理を説明するための補足図であり、ある特定の時間での基板の位置を示す図である。
【図16】他の実施形態に係る実装システムの処理を説明するための補足図であり、図15と同じ時刻での基板毎のフォーマットの一例を示す図である。
【図17】さらに別の実施形態に係る実装システムを示す図である。
【図18】さらに別の実施形態に係る実装システムで用いられるフォーマットの一例を示す図である。
【図19】制御装置、半田形成装置及び半田検査装置の動作を示すシーケンス図である。
【発明を実施するための形態】
【0022】
以下、本技術に係る実施形態を、図面を参照しながら説明する。
【0023】
<第1実施形態>
[実装システムの全体構成及び各部の構成]
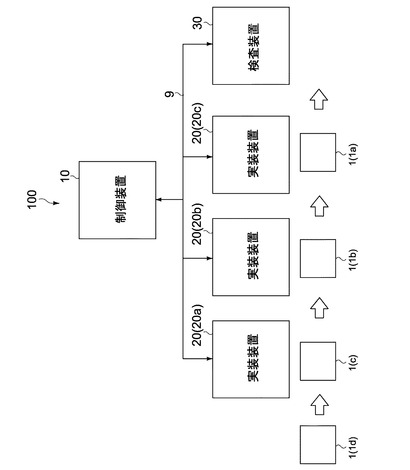
図1は、第1実施形態に係る実装システム100を示す図である。図1に示すように、実装システム100は、複数の電子部品を分担して基板1上に実装する複数の実装装置20と、複数の実装装置20により電子部品が実装された基板1を検査する検査装置30と、複数の実装装置20及び検査装置30を制御する制御装置10とを含む。複数の実装装置20と、検査装置30とは、一列に連結されて配置されている。
【0024】
制御装置10、複数の実装装置20及び検査装置30は、通信ケーブル9を介して相互に通信可能に接続されている。
【0025】
実装装置20の数は、本実施形態では、3つとされている。なお、本実施形態の説明において、3つの実装装置20を特に区別する場合には、基板1が搬送される上流側から順番に、第1の実装装置20a、第2の実装装置20b、第3の実装装置20cと呼ぶ。
【0026】
図2は、実装システム100の電気的な構成を示す図である。図2に示すように、制御装置10は、制御部11と、記憶部12と、表示部13と、入力部14と、通信部15とを有する。
【0027】
制御部11は、例えば、CPU(Central Processing Unit)であり、制御装置10が有する各部を統括的に制御する。
【0028】
記憶部12は、制御部11の制御に必要な各種のプログラムが記憶された不揮発性のメモリ(例えば、HD(Hard Disc)、ROM(Read Only memory))を含む。また、記憶部12は、制御部11の作業領域として用いられる揮発性のメモリ(例えば、RAM(Random Access memory))を含む。記憶部12には、基板1毎に用意された複数のフォーマット2が記憶される。フォーマット2についての詳細については、後述する。
【0029】
通信部15は、各実装装置20及び検査装置30に情報を送信したり、各実装装置20及び検査装置30から情報を受信したりする。
【0030】
表示部13は、例えば、液晶ディスプレイ、あるいは、ELディスプレイ(EL:Electro Luminescence)等により構成される。表示部13は、必要に応じて、フォーマット2を画面上に表示する。入力部14は、キーボードやマウス等により構成され、ユーザ操作に応じて、ユーザからの指示を入力する。
【0031】
複数の実装装置20は、それぞれ、制御部21と、記憶部22と、通信部23と、実装機構24とを有する。
【0032】
制御部21は、例えば、CPUであり、実装装置20が有する各部を統括的に制御する。記憶部22は、制御部21の制御に必要な各種のプログラムが記憶された不揮発性のメモリと、制御部21の作業領域として用いられる揮発性のメモリとを含む。記憶部22には、基板1毎に用意された複数のフォーマット2が記憶される。
【0033】
通信部23は、制御装置10、検査装置30及び他の実装装置20へ情報を送信したり、制御装置10、検査装置30及び他の実装装置20から情報を受信したりする。
【0034】
実装機構24は、例えば、基板1を搬送するコンベアなどの搬送部と、電子部品を供給する供給部と、電子部品を実装する一又は複数の実装ヘッドと、実装ヘッドを移動させる移動部とを含む。
【0035】
供給部は、ICチップ(IC:Integrated Circuit)、抵抗R、コンデンサC、インダクタI等の電子部品が種類ごとに収納された複数のキャリアテープを含む。実装ヘッドは、供給部から供給される電子部品を吸着して保持する一又は複数の吸着ノズルを含む。実装ヘッドは、電子部品の供給位置で吸着ノズルにより電子部品を吸着して基板1上に移動する。そして、吸着ノズルを下降させて基板1上に電子部品を実装する。
【0036】
電子部品の実装は、第1の実装装置20a、第2の実装装置20b、第3の実装装置20cの順番で実行される。第1の実装装置20aは、自己が実装を担当する電子部品の実装が終了すると、次の第2の実装装置20bに基板1を受け渡し、第2の実装装置20bは、自己が実装を担当する電子部品の実装が終了すると、第3の実装装置20cへ基板1を受け渡す。最後の第3の実装装置20cは、自己が実装を担当する電子部品を基板1上に実装すると、検査装置30に基板1を受け渡す。
【0037】
検査装置30は、制御部31と、記憶部32と、通信部33と、検査機構34とを有する。
【0038】
制御部31は、例えば、CPUであり、検査装置30が有する各部を統括的に制御する。記憶部32は、制御部31の制御に必要な各種のプログラムが記憶された不揮発性のメモリと、制御部31の作業領域として用いられる揮発性のメモリとを含む。記憶部32には、基板1ごとに用意された複数のフォーマット2が記憶される。
【0039】
通信部33は、制御装置10及び各実装装置20に情報を送信したり、制御装置10及び各実装装置20から情報を受信したりする。
【0040】
検査機構34は、実装装置20により電子部品が実装された基板1を搬送するコンベアなどの搬送部と、検査位置に位置決めされた基板1(電子部品)を撮像する撮像部を含む。撮像部は、例えば、CCDセンサ(CCD:Charge Coupled Device)、あるいは、CMOSセンサ(CMOS:Complementary Metal Oxide Semiconductor)等により構成される。
【0041】
検査装置30の制御部31は、撮像部により撮像された画像を解析し、電子部品の実際の位置を判定する。そして、実際の電子部品の位置と、電子部品の正規の位置とを比較して、電子部品のずれ量を算出する。
【0042】
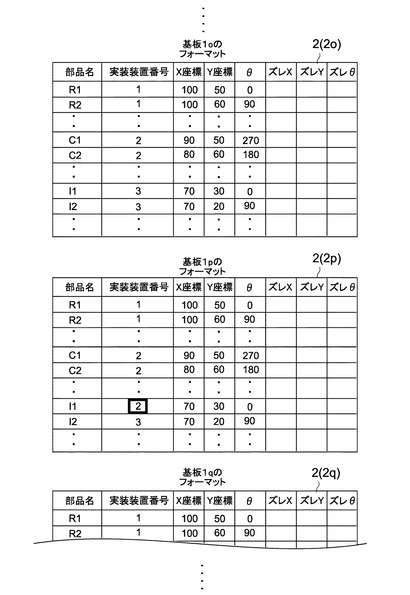
図3は、第1実施形態で用いられるフォーマット2の一例を示す図である。
【0043】
図3に示すように、フォーマット2は、基板1毎に用意されている。このフォーマット2は、制御装置10、複数の実装装置20及び検査装置30で共通で用いられる。フォーマット2は、複数の電子部品をそれぞれ識別する部品名の情報を含む。例えば、部品名の欄では、抵抗がR1、R2・・等の部品名で識別され、コンデンサがC1、C2・・等の部品名で識別され、インダクタがI1、I2・・等の部品名で識別される。
【0044】
また、フォーマット2は、各電子部品それぞれについて、その電子部品を実装する実装装置の番号の情報を含む。すなわち、フォーマット2は、複数の実装装置20が、それぞれ、複数の電子部品のうちのどの電子部品を基板1上に実装するのかを示す実装装置の分担情報を含む。例えば、実装装置の番号の欄には、1〜3の番号のうち、何れかの番号が割り当てられる。1〜3の番号は、第1の実装装置20a〜第3の実装装置20cに対応している。
【0045】
また、フォーマット2は、各電子部品それぞれについて、電子部品が実装される位置(X座標、Y座標及び基準に対する傾きθ)の情報を含む。
【0046】
また、フォーマット2は、各電子部品それぞれについて、電子部品のずれ量(X方向、Y方向及びθ方向のずれ量)の情報を含む。すなわち、フォーマット2は、複数の電子部品がそれぞれ基板1上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報を含む。
【0047】
[動作説明]
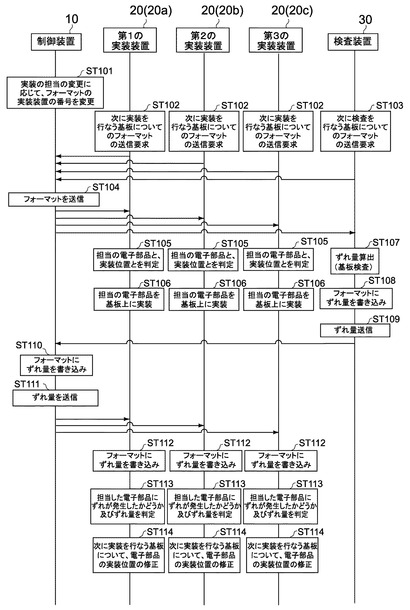
次に、実装システム100の動作について説明する。図4は、実装システム100の動作を示すシーケンス図である。
【0048】
制御装置10の制御部11は、実装装置20による電子部品の実装の担当の変更に応じて、実装の担当が変更された基板1に対応するフォーマット2の実装装置の番号(分担情報)をリアルタイムに変更する処理を実行している(ステップ101)。
【0049】
例えば、3つの実装装置20のうちの何れかの実装装置20で電子部品の位置ずれ等のエラーが発生した場合、そのエラーが生じた実装装置20での実装時間が、エラーが生じていない他の実装装置20の実装時間より長くなる場合がある。この場合、エラーが生じていない実装装置20は、エラーが生じた実装装置20の実装時間に合わせる必要があるため、実装タクトが低下する場合がある。そこで、このような場合に、エラーが生じた実装装置20が実装を担当していた電子部品を、エラーが生じていない他の実装装置20に割り振る場合がある。
【0050】
ステップ101では、制御装置10の制御部11は、このようにして実装の担当が変更された場合に、実装担当が変更された基板1に対応するフォーマット2の実装装置の番号をリアルタイムに変更する処理を実行している。なお、理解の容易のために、実装装置20による電子部品の実装の担当が変更された場合の実装システム100の処理についての詳細は後述することとして、まず、実装の担当の変更がない場合について説明することとする。
【0051】
各実装装置20の制御部21は、それぞれ、次に電子部品の実装を行なう基板1に対応するフォーマット2の送信要求の信号を、通信部23を介して制御装置10に送信する(ステップ102)。また、検査装置30の制御部31は、次に検査を行なう基板1に対応するフォーマット2の送信要求の信号を、通信部33を介して制御装置10に送信する(ステップ103)。
【0052】
制御装置10の制御部11は、各実装装置20からフォーマット2の送信要求の信号を受信すると、各実装装置20に対して、要求されたフォーマット2を送信する(ステップ104)。同様に、制御装置10の制御部11は、検査装置30からフォーマット2の送信要求の信号を受信すると、検査装置30に対して、要求されたフォーマット2を送信する(ステップ104)。
【0053】
なお、ステップ104において、制御装置10から送信されるフォーマット2は、この時点では、電子部品のずれ量の情報については、書き込まれておらず、空白とされている。
【0054】
ここで、図5を参照して、ステップ102〜ステップ104の処理について、一例を挙げて具体的に説明する。図5には、第1の実装装置20a、第2の実装装置20b、第3の実装装置20cがそれぞれ基板1c、1b、1aの実装を終了したときの様子が示されている。
【0055】
この場合、第1の実装装置20aが次に電子部品の実装を予定している基板1は、基板1dである。従って、第1の実装装置20aが基板1cの実装を終了した時点では、第1の実装装置20aは、ステップ102において、基板1dについてのフォーマット2dの送信要求の信号を制御装置10に送信をする。同様に、第2の実装装置20b、第3の実装装置20cが次に電子部品の実装を予定している基板1は、基板1c、1bである。従って、第2の実装装置20b、第3の実装装置20cは、図5に示す時点では、ステップ102において、基板1c、1bについてのフォーマット2c、2bの送信要求の信号を制御装置10へ送信する。
【0056】
また、図5に示す時点で、検査装置30が次に検査を予定している基板1は、基板1aである。従って、検査装置30は、ステップ103において、基板1aについてのフォーマット2aの送信要求の信号を制御装置10に送信する。
【0057】
そして、制御装置10は、ステップ104において、各実装装置20、検査装置30から要求のあったフォーマット2を送信することになる。
【0058】
各実装装置20の制御部21は、それぞれ通信部23を介して制御装置10からフォーマット2を受信すると、受信したフォーマット2を記憶部22に記憶する。そして、各実装装置20の制御部21は、それぞれ、フォーマット2に基づいて、自己が実装を担当する電子部品と、その電子部品の実装位置とを判定する(ステップ105)。フォーマット2は、電子部品の部品名と、その電子部品の実装を担当する実装装置の番号と、その電子部品の実装位置とが関連付けられている。従って、各実装装置20の制御部21は、それぞれ、フォーマット2に基づいて、自己が実装を担当する電子部品と、その電子部品の実装位置とを判定することができる。
【0059】
次に、各実装装置20は、それぞれ自己が実装を担当する電子部品を基板1上に実装する(ステップ106)。この場合、実装装置20は、実装ヘッドを電子部品の供給位置に移動させて吸着ノズルにより電子部品を吸着する。その後、実装装置20は、実装ヘッドを基板1上に移動して、吸着ノズルを下降させて基板1上に電子部品を実装する。
【0060】
自己が担当する電子部品の実装が終了すると、各実装装置20は、それぞれ、次の実装装置20(第3の実装装置20cは、検査装置30)へ基板1を受け渡す。そして、各実装装置20は、それぞれ、再び、次に実装を行なう基板1についてのフォーマット2の送信要求の信号を制御装置10へ送信する(ステップ102)。以降、ステップ102、105〜106の処理が繰り返される。
【0061】
検査装置30の制御部31は、通信部33を介して制御装置10からフォーマット2を受信すると、フォーマット2を記憶部32に記憶させる。そして、検査装置30の制御部31は、フォーマット2に基づいて、電子部品のずれ量を算出する(ステップ107)。
【0062】
フォーマット2は、電子部品の部品名と、電子部品の実装位置とが関連付けられている。従って、検査装置30は、フォーマット2に基づいて、電子部品のずれ量を算出することができる。この場合、例えば、検査装置30の制御部31は、撮像部により撮像された画像を解析し、電子部品の実際の位置を判定する。そして、検査装置30の制御部31は、判定された電子部品の実際の位置と、電子部品の正規の位置(フォーマット2内の電子部品の実装位置)とを比較して、電子部品のずれ量を算出する。
【0063】
検査装置30の制御部31は、電子部品のずれ量を算出すると、電子部品のずれ量の情報を、検査した基板1に対応するフォーマット2に書き込んで記憶部32に記憶させる(ステップ108)。そして、検査装置30の制御部31は、電子部品のずれ量の情報を通信部33を介して制御装置10へ送信する(ステップ109)。
【0064】
検査装置30の制御部31は、電子部品のずれ量の情報を制御装置10へ送信すると、再び、次に検査を行なう基板1についてのフォーマット2の送信を制御装置10に要求する(ステップ103)。以降、検査装置30の制御部31は、ステップ103、107〜109の処理を繰り返す。
【0065】
制御装置10の制御部11は、検査装置30からずれ量の情報を受信すると、フォーマット2にずれ量を書き込んで記憶部12に記憶させる(ステップ110)。この場合、制御装置10の制御部11は、ずれ量が検査された基板1に対応するフォーマット2に、ずれ量を書き込んで記憶部12に記憶させる。そして、制御装置10の制御部11は、電子部品のずれ量の情報を各実装装置20に送信する(ステップ111)。これにより、電子部品のずれ量が各実装装置20にフィードバックされる。
【0066】
各実装装置20の制御部21は、制御装置10から電子部品のずれ量の情報を受信すると、それぞれ、フォーマット2にずれ量を書き込んで記憶部22に記憶させる(ステップ112)。この場合、各実装装置20の制御部21は、それぞれ、ずれ量が検査された基板1に対応するフォーマット2に、ずれ量を書き込んで記憶部22に記憶させる。各実装装置20は、ステップ102において、既に、ずれ量が検査された基板1に対応するフォーマット2を取得しているので、このフォーマット2の電子部品のずれ量の欄(空白)に、電子部品のずれ量を書き込めばよい。
【0067】
次に、各実装装置20の制御部21は、それぞれ、そのフォーマット2に基づいて自己が実装を担当した電子部品にずれが生じたか否かと、電子部品のずれ量とを判定する(ステップ113)。フォーマット2は、電子部品の部品名と、その電子部品を実装した実装装置の番号と、その電子部品のずれ量とが関連付けられている。従って、各実装装置20の制御部21は、それぞれ、フォーマット2に基づいて、自己が実装を担当した電子部品にずれが生じたか否かと、電子部品のずれ量とを判定することができる。
【0068】
例えば、第1の実装装置20aの制御部21は、フォーマット2の実装装置の番号の欄が1とされている電子部品について、電子部品にずれが発生したか否かと、電子部品のずれ量とを判定する。同様に、第2の実装装置20b及び第3の実装装置20cの制御部21は、フォーマット2の実装装置の番号の欄が2、3とされている電子部品について、電子部品にずれが発生したか否かと、電子部品のずれ量とを判定する。
【0069】
電子部品のずれ量を判定すると、各実装装置20の制御部21は、それぞれ、次に実装を行なう基板1について、電子部品のずれ量に基づいて、ずれ量を修正して基板1上に電子部品を実装する(ステップ114)。
【0070】
ここで、図6及び図7を参照して、図4に示すステップ112〜ステップ114の処理について、一例を挙げて具体的に説明する。
【0071】
図6には、検査装置30が基板1aの検査を終了し、第1の実装装置20a、第2の実装装置20b、第3の実装装置20cがそれぞれ基板1d、1c、1bの実装を終了したときの様子が示されている。
【0072】
図7は、基板1aについての検査が終了して、基板1aについてのフォーマット2aに、電子部品のずれ量が書き込まれたときの、基板1毎のフォーマット2の一例を示す図である。すなわち、図7は、図6に示す時点での基板1毎のフォーマット2の一例を示す図である。図7では、基板1aについて、電子部品I1(インダクタ)の実装位置がずれた場合の一例が示されている。なお、基板1b以降の基板については、この時点では、検査装置30により検査されていない。従って、図7に示すように、基板1b以降の基板に対応するフォーマット2b、2c・・の電子部品のずれ量の欄は、空白とされている。
【0073】
基板1aの検査が終了し、基板1aについてのフォーマット2aにずれ量が書き込まれた場合(ステップ112)、各実装装置20の制御部21は、基板1aについてのフォーマット2aを参照する。そして、各実装装置20の制御部21は、基板1aについてのフォーマット2aに基づいて、自己が実装を担当した電子部品にずれが生じたか否かと、電子部品のずれ量とを判定する(ステップ113)。
【0074】
この場合、第1の実装装置20aの制御部21は、基板1aのフォーマット2aにおいて、実装装置の番号が1とされている電子部品について、電子部品にずれが発生したか否かと、電子部品のずれ量とを判定する。第2の実装装置20bは、実装装置の番号が2とされている箇所を参照すればよく、第3の実装装置20cは、実装装置の番号が3とされている箇所を参照すればよい。
【0075】
図7に示す例では、基板1aのフォーマット2aにおいて、第3の実装装置20cが実装を担当した電子部品I1(インダクタ)が、正規の位置からX方向に−1mm、Y方向に0.8mmずれた場合が示されている。従って、この場合、第3の実装装置20cの制御部21は、次に実装を行なう基板1では、電子部品I1のずれ量を修正するために、電子部品I1をX方向に+1mm、Y方向に−0.8mmずれた位置に電子部品C1を実装する(ステップ114)。
【0076】
図6を参照して、この時点で、第3の実装装置20cが、次に実装を行なう基板1は、第2の実装装置20bから受け渡される基板1cである。従って、この場合、第3の実装装置20cは、次に実装を行なう基板1cにおいて、電子部品のずれ量を修正することになる。第3の実装装置20cがその後に実装を行なう基板1d、1e・・は、基板1cと同様に、ずれ量が修正された位置に電子部品が実装されることになる。
【0077】
なお、第1の実装装置20aが、次に実装を行なう基板1は、基板1eである。従って、基板1aについて、第1の実装装置20aが実装を担当した電子部品のうち何れかの電子部品にずれが生じていた場合、第1の実装装置20aの制御部21は、次に実装を行なう基板1eにおいて、電子部品のずれ量を修正することになる。
【0078】
また、第2の実装装置20bが、次に実装を行なう基板1は、基板1dである。従って、基板1aについて、第2の実装装置20bが実装を担当した電子部品のうち何れかの電子部品にずれが生じていた場合、第2の実装装置20bの制御部21は、次に実装を行なう基板1dにおいて、電子部品のずれ量を修正することになる。
【0079】
なお、図4に示す例では、ステップ113において、各実装装置20が、それぞれ、フォーマット2に基づいて、自己が実装を担当した電子部品にずれか発生したか否かと、その電子部品についてのずれ量を判定する場合について説明した。しかし、この処理は、制御装置10が実行してもよい。この場合、制御装置10の制御部11は、フォーマット2に基づいて、どの実装装置20が実装したどの電子部品にずれが生じたかを判定する。そして、制御装置10の制御部11は、ずれた位置に電子部品を実装した実装装置20に対して、ずれた位置に実装された電子部品のずれ量を修正させる信号を送信すればよい。
【0080】
次に、実装装置20による電子部品の実装の担当が変更された場合の実装システム100の処理について、一例を挙げて詳細に説明する。
【0081】
図8は、実装装置20による電子部品の実装の担当が変更された場合の実装システム100の処理を説明するための補足図である。図8には、検査装置30が基板1lの検査を終了し、第1の実装装置20a、第2の実装装置20b、第3の実装装置20cが、基板1o、1n、1mの実装を終了したときの様子が示されている。
【0082】
図9は、図8に示す時点での基板1毎のフォーマット2の一例を示す図である。図9では、制御装置10の記憶部12に記憶されたフォーマット2が示されている。
【0083】
ここで、例えば、制御装置10の制御部11が、実装タクトの向上のために、電子部品I1の実装の担当を、第3の実装装置20cから第2の実装装置20bに変更することを決定した場合を想定する。
【0084】
この場合、制御装置10の制御部11は、電子部品の実装が開始されていない基板1p(これから第1の実装装置20aが電子部品を実装する基板1p)(図8参照)のフォーマット2pについて、電子部品I1に対応する実装装置の番号を3から2へ変更する処理を実行する(ステップ101)。なお、基板1q以降の基板1に対応するフォーマット2q、2r・・・についても、電子部品I1に対応する実装装置の番号を3から2へ変更する処理が実行される。
【0085】
これにより、基板1o以前の基板1についてのフォーマット2では、電子部品I1に対応する実装装置の番号の欄の数字が3とされているのに対して、基板1p以降の基板1についてのフォーマット2p、2q・・・では、その欄が2とされる。
【0086】
各実装装置20が基板1pに電子部品を実装するとき、各実装装置20は、それぞれ、基板1pについてのフォーマット2p内における実装装置の番号の欄を参照して自己が担当する部品を判定し、電子部品を基板1上に実装する(ステップ113、114)。このとき、フォーマット2pでは、電子部品I1についての実装装置の番号が3から2へ番号が書き換えられているので、電子部品I1は、基板1p以降では、第2の実装装置20bにより実装されることになる。
【0087】
ここでの説明では、図8に示す状態のときに実装担当の変更が決定された場合に、基板1p以降の基板1に対応するフォーマット2p、2q・・・について、電子部品I1に対応する実装装置の番号を3から2へ変更する場合について説明した。しかし、この時点で、第2の実装装置20bは、基板1oの実装をまだ開始していない。従って、制御装置10の制御部11は、図8に示す状態のときに実装担当の変更を決定した場合、基板1o以降の基板1に対応するフォーマット2o、2p・・について、電子部品I1に対応する実装装置の番号を3から2へ変更する処理を実行してもよい。このように、制御装置10の制御部11は、番号変更後の番号に対応する実装装置20が、まだ実装を開始していない基板1について、その基板1に対応するフォーマット2の実装装置の番号を変更する処理を実行してもよい。
【0088】
図10は、基板1pが検査装置30まで移動して、基板1pの検査が終了したときの様子を示す図である。
【0089】
図11は、検査装置30によって基板1pの検査が終了して、基板1pのフォーマット2pに電子部品のずれ量が書き込まれた時点での基板1毎のフォーマット2の一例を示す図である。すなわち、図11は、図10に示す時点でのフォーマット2の一例を示す図である。図11では、基板1pのフォーマット2pにおいて、第2の実装装置20bが実装を担当する電子部品I1(インダクタ)が、正規の位置からX方向に2mm、Y方向に3mmずれた場合が示されている。
【0090】
検査装置30が基板1pの検査を終了し、電子部品のずれ量の情報が制御装置10から各実装装置20に送信されたとき(ステップ111)、各実装装置20は、それぞれ、基板1pのフォーマット2に電子部品のずれ量を書き込んで記憶する(ステップ112)。そして、各実装装置20は、それぞれ、基板1pのフォーマット2pを参照して、基板1pについて、自己が実装を担当した電子部品にずれが発生したかどうかと、電子部品のずれ量を判定する(ステップ113)。
【0091】
ここでの例では、基板1pのフォーマット2pについて、電子部品I1に対応する実装装置の番号の欄は、2とされている。従って、この場合、第2の実装装置20bが、自己が実装を担当した電子部品I1にずれが生じたと判定する。
【0092】
第2の実装装置20bは、基板1pについて、電子部品I1のずれ量を判定すると、次に実装を行なう基板1s以降の基板1(図10参照)について、電子部品I1の実装位置を修正した上で、基板1上に電子部品I1を実装する(ステップ114)。この場合、第2の実装装置20bの制御部21は、電子部品I1のずれ量を修正するために、X方向に−2mm、Y方向に−3mmずらして電子部品I1を基板1上に実装する。
【0093】
このように、本実施形態では、電子部品の実装の担当が変更された場合でも、複数の実装装置20のうち、電子部品をずれた位置に実装した実装装置20に対して、正確に電子部品のずれ量の情報をフィードバックすることができる。すなわち、本実施形態では、実装装置20の分担情報(実装装置の番号の情報)と、電子部品のずれ量の情報とを含むフォーマット2が基板1毎に用意されている。そして、実装装置20による電子部品の実装の担当の変更があった場合に、担当が変更された基板1についてのフォーマット2の分担情報がリアルタイムに変更する処理が実行されている。これにより、基板1毎に、リアルタイムで実装の担当の変更に追従することができるので、複数の実装装置20のうち、電子部品をずれた位置に実装した実装装置20に対して、正確にずれ量の情報をフィードバックすることができる。電子部品をずれた位置に実装した実装装置20は、フォーマット2の電子部品のずれ量に基づいて、電子部品の位置ずれを修正することができる。
【0094】
<第2実施形態>
次に、本技術の第2実施形態について説明する。なお、第2実施形態以降の説明では、上述の第1実施形態と同様の構成及び機能を有する部分については、同一符号を付し、説明を省略又は簡略化する。
【0095】
[実装システムの全体構成及び各部の構成]
図12は、第2実施形態に係る実装システム200を示す図である。図12に示すように、第2実施形態に係る実装システム200は、制御装置10と、複数の実装装置20と、複数の検査装置30とを有する。第2実施形態では、複数の検査装置30が、複数の実装装置20の下流側に一列に連結して配置されている点で、上述の第1実施形態と異なっている。
【0096】
複数の検査装置30は、複数の実装装置20によって電子部品が実装された基板1を分担して検査する。図2に示す例では、検査装置30の数は、3つとされている。なお、3つの検査装置30を特に区別する場合には、基板1が搬送される上流側から順番に、第1の検査装置30a、第2の検査装置30b、第3の検査装置30cと呼ぶ。
【0097】
第1の検査装置30aは、自己が検査を担当する電子部品の検査が終了すると、次の第2の検査装置30bに基板1を受け渡し、第2の検査装置30bは、自己が検査を担当する電子部品の検査が終了すると、第3の検査装置30cへ基板1を受け渡す。第3の検査装置30cは、自己が検査を担当する電子部品の検査が終了すると、例えば、リフロー装置等の装置に基板1を受け渡す。
【0098】
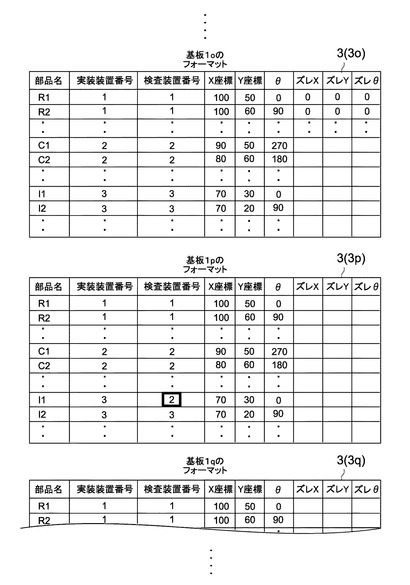
図13は、第2実施形態に係る実装システム200で用いられるフォーマット3の一例を示す図である。このフォーマット3は、検査装置の番号の欄が追加されている点で、上述の第1実施形態と異なっている。すなわち、このフォーマット3は、複数の検査装置30が、それぞれ、複数の電子部品のうちどの電子部品を検査するのかを示す検査装置の分担情報をさらに含んでいる。このフォーマット3は、制御装置10、複数の実装装置20及び複数の検査装置30で共通で用いられる。
【0099】
[動作説明]
第2実施形態に係る実装システム200の動作を説明する。図14は、第2実施形態に係る実装システム200の処理を示すシーケンス図である。なお、制御装置10と、3つの実装装置20との間の処理については、上述の第1実施形態と基本的に同じであるので、第2実施形態の説明では、制御装置10と、複数の検査装置30との間の処理を中心に説明する。
【0100】
制御装置10の制御部11は、検査装置30による電子部品の検査の担当の変更に応じて、検査担当が変更された基板1に対応するフォーマット3の検査装置の番号(検査装置の分担情報)をリアルタイムに変更する処理を実行している(ステップ201)。
【0101】
例えば、3つの検査装置30のうちの何れかの検査装置30で電子部品の位置ずれ等のエラーが検出された場合、エラーが生じた検査装置30は、例えば、マーキング処理などのエラーに対応する処理が必要になる。従って、エラーが生じた検査装置30での検査時間が、エラーが生じていない他の検査装置30の検査時間より長くなる場合がある。このような場合に、エラーが生じた検査装置30が検査を担当していた電子部品を、エラーが生じていない他の検査装置30に割り振る場合がある。
【0102】
図15には第1の検査装置30a、第2の検査装置30b、第3の検査装置30cが基板1o、1n、1mの検査を終了し、第1の実装装置20a、第2の実装装置20b、第3の実装装置20cが基板1r、1q、1pの実装を終了したときの様子が示されている。
【0103】
図16は、図15に示す時点での基板1毎のフォーマット3の一例を示す図である。
【0104】
ここで、例えば、制御装置10の制御部11が、タクトの向上のために、電子部品I1の検査の担当を、第3の検査装置30cから第2の検査装置30bに変更することを決定した場合を想定する。
【0105】
この場合、制御装置10の制御部11は、電子部品の検査が開始されていない基板1p(これから第1の検査装置30aが電子部品を検査する基板1p)(図15参照)のフォーマット3pについて、電子部品I1に対応する検査装置の番号を3から2へ変更する処理を実行する(ステップ201)。なお、基板1q以降の基板1についてのフォーマット3q、3r・・・についても、電子部品I1に対応する検査装置の番号を3から2へ変更する処理が実行される。
【0106】
ここでの説明では、図15に示す状態のときに検査担当の変更が決定された場合に、基板1p以降の基板1に対応するフォーマット3p、3q・・について、電子部品I1に対応する検査装置の番号を3から2へ変更する場合について説明した。しかし、この時点で、第2の検査装置30bは、基板1oの検査をまだ開始していない。従って、制御装置10の制御部11は、図15に示す状態のときに検査担当の変更が決定された場合に、基板1o以降の基板1に対応するフォーマット3o、3p・・について、電子部品I1に対応する検査装置の番号を3から2へ変更する処理を実行してもよい。すなわち、制御装置10の制御部11は、番号変更後の番号に対応する検査装置30が、まだ検査を開始していない基板1について、その基板1に対応するフォーマット3の検査装置の番号を変更する処理を実行してもよい。
【0107】
各検査装置30の制御部31は、それぞれ、次に検査を行なう基板1に対応するフォーマット3の送信要求の信号を、通信部33を介して制御装置10に送信する(ステップ202)。図15に示す例では、第1の検査装置30a、第2の検査装置30b、第3の検査装置30cが、次に検査を行なう基板1は、基板1p、1o、1nである。従って、この場合、第1の検査装置30a、第2の検査装置30b、第3の検査装置30cは、基板1p、1o、1nに対応するフォーマット3p、3o、3nの送信要求の信号を制御装置10に送信する。
【0108】
制御装置10の制御部11は、各検査装置30からフォーマット3の送信要求の信号を受信すると、各検査装置30に対して、要求されたフォーマット3を送信する(ステップ203)。
【0109】
各検査装置30の制御部31は、それぞれ通信部33を介して制御装置10からフォーマット3を受信すると、受信したフォーマット3を記憶部32に記憶する。そして、各検査装置30の制御部31は、それぞれ、フォーマット3に基づいて自己が検査を担当する電子部品を判定する(ステップ204)。フォーマット3は、電子部品の部品名と、その電子部品についての検査装置の番号とが関連づけられているので、各検査装置30は、それぞれ、フォーマット3に基づいて、自己が検査を担当する電子部品を判定することができる。
【0110】
例えば、第1の検査装置30aの制御部31は、基板1pに対応するフォーマット3p内の検査装置の番号の欄が1とされている電子部品の検査を担当すると判定する。また、例えば、第2の検査装置30b、第3の検査装置30cの制御部31は、基板1o、基板1nに対応するフォーマット3o、3n内の検査装置の番号の欄が2、3とされている電子部品の検査を担当すると判定する。
【0111】
そして、各検査装置30は、それぞれ、担当の電子部品について、電子部品のずれ量を算出する(ステップ205)。この場合、各検査装置30の制御部31は、それぞれ、実際の電子部品の位置と、電子部品の正規の位置(フォーマット3内の電子部品の実装位置)とを比較して、電子部品のずれ量を算出する。
【0112】
電子部品のずれ量を算出すると、各検査装置30は、それぞれ、検査した基板1のフォーマット3に電子部品のずれ量を書き込む(ステップ206)。例えば、第1の検査装置30a、第2の検査装置30b、第3の検査装置30cは、基板1p、1o、1nに対応するフォーマット3p、3o、3qに、検査したずれ量を書き込む。そして、各検査装置30は、それぞれ、電子部品のずれ量の情報を制御装置10に対して送信する(ステップ207)。
【0113】
ここで、基板1pに対応するフォーマット3pでは、電子部品I1についての実装装置の番号が3から2へ番号が変更されている。従って、基板1p以降では、電子部品I1は、第2の実装装置20bにより検査されることになる。
【0114】
このように、本実施形態では、検査装置30による電子部品の検査の担当の変更に柔軟に対応することができる。
【0115】
制御装置10の制御部11は、各検査装置30から電子部品のずれ量の情報を受信すると、受信されたずれ量をフォーマット3に書き込む(ステップ208)。そして、制御装置10の制御部11は、電子部品のずれ量の情報を各実装装置20へ送信する(ステップ209)。
【0116】
各実装装置20の制御部21は、制御装置10から電子部品のずれ量の情報を受信すると、フォーマット3にずれ量を書き込んで記憶部22に記憶させる。そして、各実装装置20は、それぞれ、そのフォーマット3から自己が実装を担当した電子部品にずれが生じたか否かと、電子部品のずれ量とを判定する。電子部品のずれ量を判定すると、各実装装置20の制御部21は、それぞれ、次に実装を行なう基板1について、電子部品のずれ量に基づいて、ずれ量を修正して基板1上に電子部品を実装する。
【0117】
第2実施形態の説明では、複数の実装装置20の下流側に、複数の検査装置30が配置される場合について説明した。一方、第1の実装装置20a、第1の検査装置30a、第2の実装装置20b、第2の検査装置30b・・のように、実装装置20と検査装置30とが交互に配列されていてもよい。この場合、実装装置20のすぐ後ろ側に配置された検査装置30により、その実装装置により実装された電子部品を検査することで、検査結果のフィードバックにかかる時間を短縮することができる。
【0118】
<第3実施形態>
次に、本技術の第3実施形態について説明する。
【0119】
[実装システムの全体構成及び各部の構成]
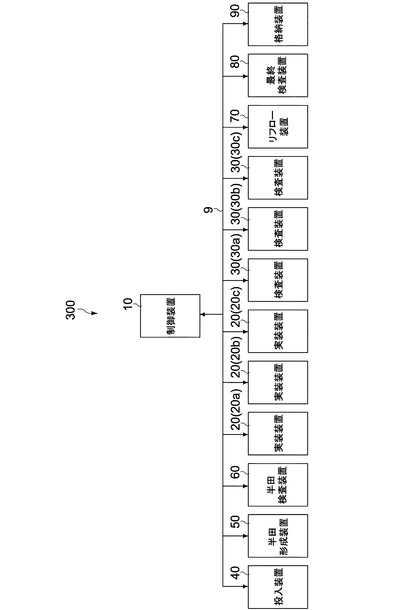
図17は、第3実施形態に係る実装システム300を示す図である。図17に示すように、第3実施形態に係る実装システム300は、各装置を制御する制御装置10を有している。また、実装システム300は、基板1の搬送方向の上流側から順番に、投入装置40と、半田形成装置50と、半田検査装置60と、複数の実装装置20と、複数の検査装置30と、リフロー装置70と、最終検査装置80と、格納装置90とを有している。
【0120】
投入装置40は、半田形成装置50に基板1を投入する。投入装置40は、投入装置40の各部を統括的に制御する制御部と、揮発性メモリ及び不揮発性メモリを含む記憶部と、他の装置と通信するための通信部と、半田形成装置50に基板1を投入する投入機構とを含む。
【0121】
半田形成装置50は、電子部品が実装される位置に対応する位置に半田を形成し、半田が形成された基板1を半田検査装置60に受け渡す。半田形成装置50としては、例えば、クリーム半田を基板1上に印刷するクリーム半田印刷装置、あるいは、クリーム半田をノズルから吐出して塗布する半田塗布装置等が挙げられる。
【0122】
半田形成装置50は、半田形成装置50の各部を統括的に制御する制御部と、揮発性メモリ及び不揮発性メモリを含む記憶部と、他の装置と通信するための通信部と、基板1上に半田を形成する半田形成機構とを含む。
【0123】
半田検査装置60は、半田形成装置50により半田が形成された基板1を検査して、基板1を第1の実装装置20aに受け渡す。半田検査装置60は、半田検査装置60の各部を統括的に制御する制御部と、揮発性メモリ及び不揮発性メモリを含む記憶部と、他の装置と通信するための通信部と、基板1上に形成された半田を検査する半田検査機構とを含む。半田検査機構は、半田が形成された基板1を撮像する撮像部を含む。
【0124】
複数の実装装置20及び複数の検査装置30は、上述の各実施形態と同様の構成であるので、詳細については、省略する。
【0125】
リフロー装置70は、第3の検査装置30cから受け渡された基板1をリフロー処理し、リフロー処理後の基板1を最終検査装置80に受け渡す。リフロー装置70は、リフロー装置70の各部を統括的に制御する制御部と、揮発性メモリ及び不揮発性メモリを含む記憶部と、他の装置と通信するための通信部と、基板1をリフロー処理する加熱機構とを含む。
【0126】
最終検査装置80は、リフロー処理後の基板1を最終検査し、格納装置90に受け渡す。最終検査装置80は、検査装置30と基本的に同様の構成であるので、詳細については省略する。
【0127】
格納装置90は、最終検査装置80から受け渡された基板1をストッカーに格納する。格納装置90は、格納装置90の各部を統括的に制御する制御部と、揮発性メモリ及び不揮発性メモリを含む記憶部と、他の装置と通信するための通信部と、基板1をストッカーに格納する格納機構とを含む。
【0128】
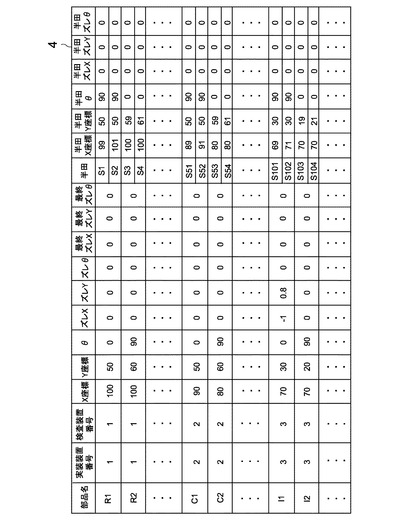
図18は、第3実施形態に係る実装システム300で用いられるフォーマットの一例を示す図である。このフォーマット4は、第1実施形態及び第2実施形態と同様に、基板1毎に用意されている。
【0129】
このフォーマット4は、電子部品に対応する位置に形成される半田の欄と、半田が形成される位置(X座標、Y座標及び基準に対する傾きθ)の欄とが追加されている。また、半田それぞれについての半田のずれ量(X方向、Y方向及びθ方向のずれ量)の欄が追加されている点で上述の各実施形態で用いられたフォーマット2、3と異なっている。すなわち、フォーマット4は、半田形成装置50により基板1上に形成された半田が正規の位置からどの程度ずれたかを示す半田のずれ量の情報をさらに有している。
【0130】
また、フォーマット4は、最終的な電子部品のずれ量(X方向、Y方向及びθ方向のずれ量)の欄が追加されている。すなわち、フォーマット4は、リフロー装置70によってリフロー処理された基板1上の電子部品が正規の位置からどの程度ずれたかを示す最終的な電子部品のずれ量の情報をさらに有している。このフォーマット4は、半田形成装置50、半田検査装置60、複数の実装装置20、複数の検査装置30、最終検査装置80で共通で用いられる。
【0131】
[動作説明]
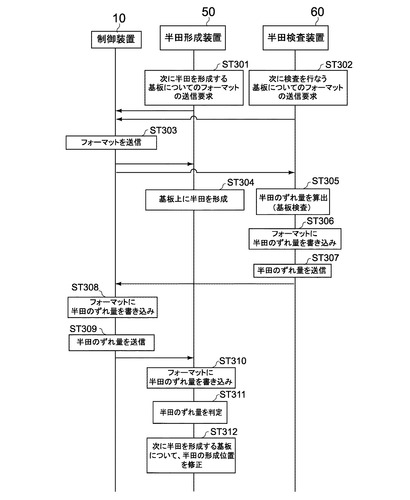
第3実施形態に係る実装システム300の動作について説明する。まず、制御装置10、半田形成装置50及び半田検査装置60の処理について説明する。図19は、制御装置10、半田形成装置50及び半田検査装置60の動作を示すシーケンス図である。
【0132】
半田形成装置50の制御部は、次に半田を形成する基板1に対応するフォーマット4の送信要求の信号を、通信部を介して制御装置10に送信する(ステップ301)。半田検査装置60の制御部は、次に検査を行なう基板1に対応するフォーマット4の送信要求の信号を、通信部を介して制御装置10に送信する(ステップ302)。
【0133】
制御装置10の制御部11は、フォーマット4の送信要求の信号を受信すると、要求されたフォーマット4を、半田形成装置50、半田検査装置60に送信する(ステップ303)。
【0134】
半田形成装置50は、フォーマット4を受信すると、基板1上に半田を形成する(ステップ304)。ここで、半田形成装置50が半田をノズルから吐出して塗布する半田塗布装置である場合、半田塗布装置は、半田の形成位置(X座標、Y座標及び基準に対する傾きθ)の情報に基づいて、基板1上に半田を形成してもよい。なお、半田形成装置50が、半田を基板1上に印刷する半田印刷装置である場合には、半田印刷時にフォーマット4内の情報は、用いられなくてもよい。
【0135】
半田検査装置60は、フォーマット4を受信すると、そのフォーマット4に対応する基板1を検査する(ステップ305)。この場合、半田検査装置60の制御部は、撮像部により基板1を撮像し、撮像部により撮像された画像を解析して半田の実際の位置を判定する。そして、実際の半田の位置と、半田の正規の位置(フォーマット4内の半田の形成位置)とを比較して、半田のずれ量を算出する。
【0136】
半田検査装置60の制御部は、半田のずれ量を算出すると、半田のずれ量をフォーマット4内の半田のずれ量の欄に書き込んで記憶部に記憶する(ステップ306)。そして、半田検査装置60の制御部は、半田のずれ量の情報を制御装置10へ送信する(ステップ307)。
【0137】
制御装置10の制御部11は、半田のずれ量の情報を受信すると、半田検査装置60によって検査された基板1に対応するフォーマット4内の半田のずれ量の欄に、半田のずれ量を書き込んで記憶する(ステップ308)。そして、半田のずれ量の情報を半田形成装置50へ送信する(ステップ309)。
【0138】
半田形成装置50の制御部は、半田のずれ量の情報を受信すると、半田検査装置60によって検査された基板1に対応するフォーマット4内の半田のずれ量の欄に、半田のずれ量を書き込んで記憶する(ステップ310)。次に、半田形成装置50の制御部は、フォーマット4内の半田のずれ量の情報に基づいて、半田のずれ量を判定する(ステップ311)。そして、半田形成装置50は、次に半田を形成する基板1について、半田のずれ量に基づいて、半田の形成位置を修正する(ステップ312)。これにより、半田の位置ずれが適切に修正される。
【0139】
次に、制御装置10及び最終検査装置80の処理を説明する。
【0140】
最終検査装置80の制御部は、次に検査を行なう基板1に対応するフォーマット4の送信要求の信号を制御装置10に送信する。制御装置10の制御部11は、要求されたフォーマット4を最終検査装置80へ送信する。
【0141】
最終検査装置80の制御部は、制御装置10からフォーマット4を受信すると、フォーマット4を記憶部に記憶させ、フォーマット4に基づいて、電子部品のずれ量を算出する。フォーマット4は、電子部品の実装位置の情報を含むので、最終検査装置80は、フォーマット4に基づいて、電子部品のずれ量を算出することができる。
【0142】
最終検査装置80の制御部は、電子部品のずれ量を算出すると、検査した基板1に対応するフォーマット4内の最終ずれ量の欄に、電子部品のずれ量を書き込んで記憶部に記憶する。そして、電子部品のずれ量の情報を制御装置10へ送信する。
【0143】
制御装置10の制御部11は、最終検査装置80からずれ量の情報を受信すると、ずれ量が検査された基板1に対応するフォーマット4内の最終ずれ量の欄に、電子部品のずれ量を書き込んで記憶部12に記憶させる。そして、制御装置10の制御部11は、電子部品のずれ量の情報を各実装装置20に送信する。これにより、電子部品のずれ量が各実装装置20にフィードバックされる。
【0144】
各実装装置20の制御部21は、制御装置10からずれ量の情報を受信すると、ずれ量が検査された基板1に対応するフォーマット4内の最終ずれ量の欄に、電子部品のずれ量を書き込んで記憶部22に記憶させる。そして、各実装装置20は、そのフォーマット4から自己が実装を担当した電子部品にずれが生じたか否かと、電子部品のずれの量とを判定する。電子部品のずれが発生した場合には、各実装装置20の制御部21は、次に実装を行なう基板1について、電子部品のずれ量に基づいて、ずれ量を修正して基板1上に電子部品を実装する。これにより、電子部品の位置ずれが適切に修正される。
【0145】
なお、制御装置10、複数の制御装置10、複数の検査装置30の動作については、上述の各実施形態とは異なるフォーマット4が使用される点を除いて、基本的に、上述の各実施形態と同様である。
【0146】
ここで、第3実施形態では、各実装装置20が基板1を実装するとき、その基板1に対応するフォーマット4には、既に半田のずれ量が書き込まれている。この半田ずれ量を有効活用することもできる。例えば、各実装装置20の制御部21は、半田のずれ量に基づいて、正規の位置からずれた位置に形成された半田上に、電子部品を実装してもよい。
【0147】
ここで、半田は、基板1の表面に形成されたソルダーレジストが開口された領域に形成される場合が多い。従って、半田が正規の位置から多少ずれた位置に形成されたとしても、半田は、リフロー装置70のリフロー処理の際に、ソルダーレジストにより自動的に正規の位置に移動され場合が多い。従って、ずれた半田上に電子部品を実装した場合、電子部品も半田の移動により自動的に正規の位置に移動される。
【0148】
第3実施形態の説明では、半田検査装置60が1つである場合について説明したが、半田検査装置60は、複数であってもよい。複数の半田検査装置60は、複数の半田を分担して検査する。この場合、半田検査装置の番号の欄がフォーマット4に追加される。また、第3実施形態の説明では、最終検査装置80が1つである場合について説明したが、最終検査装置80は、複数であってもよい。複数の最終検査装置80は、複数の電子部品を分担して検査する。この場合、最終検査装置の番号の欄がフォーマット4に追加される。
【0149】
本技術は、以下の構成もとることができる。
(1)複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットを記憶する記憶部と、
前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる制御部と
を具備する実装システム。
(2)上記(1)に記載の実装システムであって、
前記電子部品のずれ量の情報は、複数の検査装置によって分担して検査され、
前記フォーマットは、前記複数の検査装置が、それぞれ、前記複数の電子部品のうちどの前記電子部品を検査するのかを示す検査装置の分担情報をさらに有し、
前記制御部は、前記検査装置による前記電子部品の検査の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記検査装置の分担情報を変更する
実装システム。
(3)上記(1)又は(2)に記載の実装システムであって、
前記フォーマットは、前記電子部品が実装される前記基板上の位置に半田を形成する半田形成装置によって前記半田が形成された前記基板を検査する半田検査装置により検査され、前記半田形成装置により前記基板上に形成された半田が正規の位置からどの程度ずれたかを示す半田のずれ量の情報をさらに有し、
前記制御部は、前記半田形成装置に、前記フォーマットの前記半田のずれ量の情報に基づいて、前記半田の形成位置を修正させる
実装システム。
(4)上記(3)に記載の実装システムであって、
前記制御部は、前記複数の実装装置に、それぞれ、前記半田のずれ量の情報に基づいて、正規の位置からずれた位置に形成された前記半田上に前記電子部品を実装させる
実装システム。
(5)複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる
電子部品の実装方法。
(6)複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる
基板の製造方法。
(7)コンピュータに、
複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更するステップと、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させるステップと
を実行させるプログラム。
【符号の説明】
【0150】
1…基板
2、3、4…フォーマット
10…制御装置
11、21、31…制御部
12、22、32…記憶部
13、23、33…通信部
20…実装装置
30…検査装置
40…投入装置
50…半田形成装置
60…半田検査装置
70…リフロー装置
80…最終検査装置
90…格納装置
100、200、300…実装システム
【技術分野】
【0001】
本技術は、基板上に電子部品を実装する実装システム等の技術に関する。
【背景技術】
【0002】
従来から、基板上に半田を印刷する半田印刷装置、基板上に電子部品を実装する実装装置、電子部品が実装された基板をリフロー処理するリフロー装置等が一列に配置されて構成された実装システムが知られている(例えば、特許文献1参照)。
【0003】
この種の実装システムでは、一般的に、装置毎に、その装置の下流側に基板を検査する検査装置が設けられる。処理不良が検出された場合には、検査結果が検査装置からフィードバックされ、次の基板の処理に反映される。
【0004】
近年においては、実装タクトの向上のために、複数の実装装置が一列に連結される場合がある(例えば、特許文献2参照)。このような実装装置では、実装効率の向上等を目的として、例えば、特定の実装装置で電子部品の位置ずれ等のエラーなどが発生した場合に、他の実装装置にその電子部品の実装を担当させる等の処理が実行される。すなわち、どの実装装置がどの電子部品の実装を担当するのかが変更される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−134998号公報
【特許文献2】特開2001−230598号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
実装装置による電子部品の実装の担当の変更は、頻繁に発生する場合がある。電子部品の実装の担当が変更された場合、検査装置による検査結果が正確に実装装置にフィードバックできない場合があるといった問題がある。
【0007】
以上のような事情に鑑み、本技術の目的は、実装装置による電子部品の実装の担当が変更された場合に、検査装置による検査結果を正確に実装装置にフィードバックすることができる実装システム等の技術を提供することにある。
【課題を解決するための手段】
【0008】
本技術の一形態に係る実装システムは、記憶部と、制御部とを具備する。
前記記憶部は、基板毎の複数のフォーマットを記憶する。
前記複数のフォーマットは、実装装置の分担情報と、電子部品のずれ量の情報とをそれぞれ有する。
前記実装装置の分担情報は、複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す情報である。
前記電子部品のずれ量の情報は、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す情報である。
前記制御部は、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる。
【0009】
この実装システムでは、実装装置の分担情報と、電子部品のずれ量の情報とを有するフォーマットが基板毎に用意されている。これにより、この実装システムは、基板毎に、各電子部品の実装を担当する実装装置と、各電子部品のずれ量とを認識することができる。
【0010】
そして、実装装置による電子部品の実装の担当の変更があった場合には、制御部により、実装の担当が変更された基板に対応するフォーマットについて、分担情報が変更される。これにより、基板毎に、リアルタイムで実装の担当の変更に追従することができる。従って、複数の実装装置のうち、電子部品をずれた位置に実装した実装装置に対して、正確にずれ量の情報(検査装置による検査結果)をフィードバックすることができる。電子部品をずれた位置に実装した実装装置は、フォーマットの電子部品のずれ量に基づいて、電子部品の位置ずれを修正することができる。
【0011】
上記実装システムにおいて、前記電子部品のずれ量の情報は、複数の検査装置によって分担して検査されてもよい。
この場合、前記フォーマットは、前記複数の検査装置が、それぞれ、前記複数の電子部品のうちどの前記電子部品を検査するのかを示す検査装置の分担情報をさらに有していてもよい。
この場合、前記制御部は、前記検査装置による前記電子部品の検査の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記検査装置の分担情報を変更してもよい。
【0012】
これにより、検査装置による電子部品の検査の担当の変更に柔軟に対応することができる。
【0013】
上記実装システムにおいて、前記フォーマットは、前記電子部品が実装される前記基板上の位置に半田を形成する半田形成装置によって前記半田が形成された前記基板を検査する半田検査装置により検査され、前記半田形成装置により前記基板上に形成された半田が正規の位置からどの程度ずれたかを示す半田のずれ量の情報をさらに有していてもよい。
この場合、前記制御部は、前記半田形成装置に、前記フォーマットの前記半田のずれ量の情報に基づいて、前記半田の形成位置を修正させてもよい。
【0014】
この実装システムでは、半田の位置ずれが発生した場合に、半田の形成位置を適切に修正させることができる。
【0015】
上記実装システムにおいて、前記制御部は、前記複数の実装装置に、それぞれ、前記半田のずれ量の情報に基づいて、正規の位置からずれた位置に形成された前記半田上に前記電子部品を実装させてもよい。
【0016】
この実装システムでは、半田の位置ずれが発生した場合に、位置がずれた半田上に正確に電子部品を実装することができる。なお、半田の位置ずれが小さい場合には、位置がずれた半田上に電子部品を実装しても問題ない場合が多い。
【0017】
本技術の一形態に係る電子部品の実装方法は、複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更することを含む。
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる。
【0018】
本技術の一形態に係る基板の製造方法は、複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更することを含む。
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる。
【0019】
本技術の一形態に係るプログラムは、コンピュータに、
複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更するステップと、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させるステップとを実行させる。
【発明の効果】
【0020】
以上のように、本技術によれば、実装装置による電子部品の実装の担当が変更された場合に、検査装置による検査結果を正確に実装装置にフィードバックすることができる実装システム等の技術を提供することができる。
【図面の簡単な説明】
【0021】
【図1】本技術の一実施形態に係る実装システムを示す図である。
【図2】本技術の一実施形態に係る実装システムの電気的な構成を示す図である。
【図3】本技術の一実施形態に係る実装システムで用いられるフォーマットの一例を示す図である。
【図4】本技術の一実施形態に係る実装システムの動作を示すシーケンス図である。
【図5】実装システムの処理を説明するための補足図であり、ある特定の時間での基板の位置を示す図である。
【図6】本技術の一実施形態に係る実装システムの処理を説明するための補足図であり、ある特定の時間での基板の位置を示す図である。
【図7】本技術の一実施形態に係る実装システムの処理を説明するための補足図であり、図6と同じ時刻での基板毎のフォーマットの一例を示す図である。
【図8】本技術の一実施形態に係る実装システムの処理を説明するための補足図であり、ある特定の時間での基板の位置を示す図である。
【図9】本技術の一実施形態に係る実装システムの処理を説明するための補足図であり、図8と同じ時刻での基板毎のフォーマットの一例を示す図である。
【図10】本技術の一実施形態に係る実装システムの処理を説明するための補足図であり、ある特定の時間での基板の位置を示す図である。
【図11】本技術の一実施形態に係る実装システムの処理を説明するための補足図であり、図10と同じ時刻での基板毎のフォーマットの一例を示す図である。
【図12】本技術の他の実施形態に係る実装システムを示す図である。
【図13】他の実施形態に係る実装システムで用いられるフォーマットの一例を示す図である。
【図14】他の実施形態に係る実装システムの処理を示すシーケンス図である。
【図15】他の実施形態に係る実装システムの処理を説明するための補足図であり、ある特定の時間での基板の位置を示す図である。
【図16】他の実施形態に係る実装システムの処理を説明するための補足図であり、図15と同じ時刻での基板毎のフォーマットの一例を示す図である。
【図17】さらに別の実施形態に係る実装システムを示す図である。
【図18】さらに別の実施形態に係る実装システムで用いられるフォーマットの一例を示す図である。
【図19】制御装置、半田形成装置及び半田検査装置の動作を示すシーケンス図である。
【発明を実施するための形態】
【0022】
以下、本技術に係る実施形態を、図面を参照しながら説明する。
【0023】
<第1実施形態>
[実装システムの全体構成及び各部の構成]
図1は、第1実施形態に係る実装システム100を示す図である。図1に示すように、実装システム100は、複数の電子部品を分担して基板1上に実装する複数の実装装置20と、複数の実装装置20により電子部品が実装された基板1を検査する検査装置30と、複数の実装装置20及び検査装置30を制御する制御装置10とを含む。複数の実装装置20と、検査装置30とは、一列に連結されて配置されている。
【0024】
制御装置10、複数の実装装置20及び検査装置30は、通信ケーブル9を介して相互に通信可能に接続されている。
【0025】
実装装置20の数は、本実施形態では、3つとされている。なお、本実施形態の説明において、3つの実装装置20を特に区別する場合には、基板1が搬送される上流側から順番に、第1の実装装置20a、第2の実装装置20b、第3の実装装置20cと呼ぶ。
【0026】
図2は、実装システム100の電気的な構成を示す図である。図2に示すように、制御装置10は、制御部11と、記憶部12と、表示部13と、入力部14と、通信部15とを有する。
【0027】
制御部11は、例えば、CPU(Central Processing Unit)であり、制御装置10が有する各部を統括的に制御する。
【0028】
記憶部12は、制御部11の制御に必要な各種のプログラムが記憶された不揮発性のメモリ(例えば、HD(Hard Disc)、ROM(Read Only memory))を含む。また、記憶部12は、制御部11の作業領域として用いられる揮発性のメモリ(例えば、RAM(Random Access memory))を含む。記憶部12には、基板1毎に用意された複数のフォーマット2が記憶される。フォーマット2についての詳細については、後述する。
【0029】
通信部15は、各実装装置20及び検査装置30に情報を送信したり、各実装装置20及び検査装置30から情報を受信したりする。
【0030】
表示部13は、例えば、液晶ディスプレイ、あるいは、ELディスプレイ(EL:Electro Luminescence)等により構成される。表示部13は、必要に応じて、フォーマット2を画面上に表示する。入力部14は、キーボードやマウス等により構成され、ユーザ操作に応じて、ユーザからの指示を入力する。
【0031】
複数の実装装置20は、それぞれ、制御部21と、記憶部22と、通信部23と、実装機構24とを有する。
【0032】
制御部21は、例えば、CPUであり、実装装置20が有する各部を統括的に制御する。記憶部22は、制御部21の制御に必要な各種のプログラムが記憶された不揮発性のメモリと、制御部21の作業領域として用いられる揮発性のメモリとを含む。記憶部22には、基板1毎に用意された複数のフォーマット2が記憶される。
【0033】
通信部23は、制御装置10、検査装置30及び他の実装装置20へ情報を送信したり、制御装置10、検査装置30及び他の実装装置20から情報を受信したりする。
【0034】
実装機構24は、例えば、基板1を搬送するコンベアなどの搬送部と、電子部品を供給する供給部と、電子部品を実装する一又は複数の実装ヘッドと、実装ヘッドを移動させる移動部とを含む。
【0035】
供給部は、ICチップ(IC:Integrated Circuit)、抵抗R、コンデンサC、インダクタI等の電子部品が種類ごとに収納された複数のキャリアテープを含む。実装ヘッドは、供給部から供給される電子部品を吸着して保持する一又は複数の吸着ノズルを含む。実装ヘッドは、電子部品の供給位置で吸着ノズルにより電子部品を吸着して基板1上に移動する。そして、吸着ノズルを下降させて基板1上に電子部品を実装する。
【0036】
電子部品の実装は、第1の実装装置20a、第2の実装装置20b、第3の実装装置20cの順番で実行される。第1の実装装置20aは、自己が実装を担当する電子部品の実装が終了すると、次の第2の実装装置20bに基板1を受け渡し、第2の実装装置20bは、自己が実装を担当する電子部品の実装が終了すると、第3の実装装置20cへ基板1を受け渡す。最後の第3の実装装置20cは、自己が実装を担当する電子部品を基板1上に実装すると、検査装置30に基板1を受け渡す。
【0037】
検査装置30は、制御部31と、記憶部32と、通信部33と、検査機構34とを有する。
【0038】
制御部31は、例えば、CPUであり、検査装置30が有する各部を統括的に制御する。記憶部32は、制御部31の制御に必要な各種のプログラムが記憶された不揮発性のメモリと、制御部31の作業領域として用いられる揮発性のメモリとを含む。記憶部32には、基板1ごとに用意された複数のフォーマット2が記憶される。
【0039】
通信部33は、制御装置10及び各実装装置20に情報を送信したり、制御装置10及び各実装装置20から情報を受信したりする。
【0040】
検査機構34は、実装装置20により電子部品が実装された基板1を搬送するコンベアなどの搬送部と、検査位置に位置決めされた基板1(電子部品)を撮像する撮像部を含む。撮像部は、例えば、CCDセンサ(CCD:Charge Coupled Device)、あるいは、CMOSセンサ(CMOS:Complementary Metal Oxide Semiconductor)等により構成される。
【0041】
検査装置30の制御部31は、撮像部により撮像された画像を解析し、電子部品の実際の位置を判定する。そして、実際の電子部品の位置と、電子部品の正規の位置とを比較して、電子部品のずれ量を算出する。
【0042】
図3は、第1実施形態で用いられるフォーマット2の一例を示す図である。
【0043】
図3に示すように、フォーマット2は、基板1毎に用意されている。このフォーマット2は、制御装置10、複数の実装装置20及び検査装置30で共通で用いられる。フォーマット2は、複数の電子部品をそれぞれ識別する部品名の情報を含む。例えば、部品名の欄では、抵抗がR1、R2・・等の部品名で識別され、コンデンサがC1、C2・・等の部品名で識別され、インダクタがI1、I2・・等の部品名で識別される。
【0044】
また、フォーマット2は、各電子部品それぞれについて、その電子部品を実装する実装装置の番号の情報を含む。すなわち、フォーマット2は、複数の実装装置20が、それぞれ、複数の電子部品のうちのどの電子部品を基板1上に実装するのかを示す実装装置の分担情報を含む。例えば、実装装置の番号の欄には、1〜3の番号のうち、何れかの番号が割り当てられる。1〜3の番号は、第1の実装装置20a〜第3の実装装置20cに対応している。
【0045】
また、フォーマット2は、各電子部品それぞれについて、電子部品が実装される位置(X座標、Y座標及び基準に対する傾きθ)の情報を含む。
【0046】
また、フォーマット2は、各電子部品それぞれについて、電子部品のずれ量(X方向、Y方向及びθ方向のずれ量)の情報を含む。すなわち、フォーマット2は、複数の電子部品がそれぞれ基板1上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報を含む。
【0047】
[動作説明]
次に、実装システム100の動作について説明する。図4は、実装システム100の動作を示すシーケンス図である。
【0048】
制御装置10の制御部11は、実装装置20による電子部品の実装の担当の変更に応じて、実装の担当が変更された基板1に対応するフォーマット2の実装装置の番号(分担情報)をリアルタイムに変更する処理を実行している(ステップ101)。
【0049】
例えば、3つの実装装置20のうちの何れかの実装装置20で電子部品の位置ずれ等のエラーが発生した場合、そのエラーが生じた実装装置20での実装時間が、エラーが生じていない他の実装装置20の実装時間より長くなる場合がある。この場合、エラーが生じていない実装装置20は、エラーが生じた実装装置20の実装時間に合わせる必要があるため、実装タクトが低下する場合がある。そこで、このような場合に、エラーが生じた実装装置20が実装を担当していた電子部品を、エラーが生じていない他の実装装置20に割り振る場合がある。
【0050】
ステップ101では、制御装置10の制御部11は、このようにして実装の担当が変更された場合に、実装担当が変更された基板1に対応するフォーマット2の実装装置の番号をリアルタイムに変更する処理を実行している。なお、理解の容易のために、実装装置20による電子部品の実装の担当が変更された場合の実装システム100の処理についての詳細は後述することとして、まず、実装の担当の変更がない場合について説明することとする。
【0051】
各実装装置20の制御部21は、それぞれ、次に電子部品の実装を行なう基板1に対応するフォーマット2の送信要求の信号を、通信部23を介して制御装置10に送信する(ステップ102)。また、検査装置30の制御部31は、次に検査を行なう基板1に対応するフォーマット2の送信要求の信号を、通信部33を介して制御装置10に送信する(ステップ103)。
【0052】
制御装置10の制御部11は、各実装装置20からフォーマット2の送信要求の信号を受信すると、各実装装置20に対して、要求されたフォーマット2を送信する(ステップ104)。同様に、制御装置10の制御部11は、検査装置30からフォーマット2の送信要求の信号を受信すると、検査装置30に対して、要求されたフォーマット2を送信する(ステップ104)。
【0053】
なお、ステップ104において、制御装置10から送信されるフォーマット2は、この時点では、電子部品のずれ量の情報については、書き込まれておらず、空白とされている。
【0054】
ここで、図5を参照して、ステップ102〜ステップ104の処理について、一例を挙げて具体的に説明する。図5には、第1の実装装置20a、第2の実装装置20b、第3の実装装置20cがそれぞれ基板1c、1b、1aの実装を終了したときの様子が示されている。
【0055】
この場合、第1の実装装置20aが次に電子部品の実装を予定している基板1は、基板1dである。従って、第1の実装装置20aが基板1cの実装を終了した時点では、第1の実装装置20aは、ステップ102において、基板1dについてのフォーマット2dの送信要求の信号を制御装置10に送信をする。同様に、第2の実装装置20b、第3の実装装置20cが次に電子部品の実装を予定している基板1は、基板1c、1bである。従って、第2の実装装置20b、第3の実装装置20cは、図5に示す時点では、ステップ102において、基板1c、1bについてのフォーマット2c、2bの送信要求の信号を制御装置10へ送信する。
【0056】
また、図5に示す時点で、検査装置30が次に検査を予定している基板1は、基板1aである。従って、検査装置30は、ステップ103において、基板1aについてのフォーマット2aの送信要求の信号を制御装置10に送信する。
【0057】
そして、制御装置10は、ステップ104において、各実装装置20、検査装置30から要求のあったフォーマット2を送信することになる。
【0058】
各実装装置20の制御部21は、それぞれ通信部23を介して制御装置10からフォーマット2を受信すると、受信したフォーマット2を記憶部22に記憶する。そして、各実装装置20の制御部21は、それぞれ、フォーマット2に基づいて、自己が実装を担当する電子部品と、その電子部品の実装位置とを判定する(ステップ105)。フォーマット2は、電子部品の部品名と、その電子部品の実装を担当する実装装置の番号と、その電子部品の実装位置とが関連付けられている。従って、各実装装置20の制御部21は、それぞれ、フォーマット2に基づいて、自己が実装を担当する電子部品と、その電子部品の実装位置とを判定することができる。
【0059】
次に、各実装装置20は、それぞれ自己が実装を担当する電子部品を基板1上に実装する(ステップ106)。この場合、実装装置20は、実装ヘッドを電子部品の供給位置に移動させて吸着ノズルにより電子部品を吸着する。その後、実装装置20は、実装ヘッドを基板1上に移動して、吸着ノズルを下降させて基板1上に電子部品を実装する。
【0060】
自己が担当する電子部品の実装が終了すると、各実装装置20は、それぞれ、次の実装装置20(第3の実装装置20cは、検査装置30)へ基板1を受け渡す。そして、各実装装置20は、それぞれ、再び、次に実装を行なう基板1についてのフォーマット2の送信要求の信号を制御装置10へ送信する(ステップ102)。以降、ステップ102、105〜106の処理が繰り返される。
【0061】
検査装置30の制御部31は、通信部33を介して制御装置10からフォーマット2を受信すると、フォーマット2を記憶部32に記憶させる。そして、検査装置30の制御部31は、フォーマット2に基づいて、電子部品のずれ量を算出する(ステップ107)。
【0062】
フォーマット2は、電子部品の部品名と、電子部品の実装位置とが関連付けられている。従って、検査装置30は、フォーマット2に基づいて、電子部品のずれ量を算出することができる。この場合、例えば、検査装置30の制御部31は、撮像部により撮像された画像を解析し、電子部品の実際の位置を判定する。そして、検査装置30の制御部31は、判定された電子部品の実際の位置と、電子部品の正規の位置(フォーマット2内の電子部品の実装位置)とを比較して、電子部品のずれ量を算出する。
【0063】
検査装置30の制御部31は、電子部品のずれ量を算出すると、電子部品のずれ量の情報を、検査した基板1に対応するフォーマット2に書き込んで記憶部32に記憶させる(ステップ108)。そして、検査装置30の制御部31は、電子部品のずれ量の情報を通信部33を介して制御装置10へ送信する(ステップ109)。
【0064】
検査装置30の制御部31は、電子部品のずれ量の情報を制御装置10へ送信すると、再び、次に検査を行なう基板1についてのフォーマット2の送信を制御装置10に要求する(ステップ103)。以降、検査装置30の制御部31は、ステップ103、107〜109の処理を繰り返す。
【0065】
制御装置10の制御部11は、検査装置30からずれ量の情報を受信すると、フォーマット2にずれ量を書き込んで記憶部12に記憶させる(ステップ110)。この場合、制御装置10の制御部11は、ずれ量が検査された基板1に対応するフォーマット2に、ずれ量を書き込んで記憶部12に記憶させる。そして、制御装置10の制御部11は、電子部品のずれ量の情報を各実装装置20に送信する(ステップ111)。これにより、電子部品のずれ量が各実装装置20にフィードバックされる。
【0066】
各実装装置20の制御部21は、制御装置10から電子部品のずれ量の情報を受信すると、それぞれ、フォーマット2にずれ量を書き込んで記憶部22に記憶させる(ステップ112)。この場合、各実装装置20の制御部21は、それぞれ、ずれ量が検査された基板1に対応するフォーマット2に、ずれ量を書き込んで記憶部22に記憶させる。各実装装置20は、ステップ102において、既に、ずれ量が検査された基板1に対応するフォーマット2を取得しているので、このフォーマット2の電子部品のずれ量の欄(空白)に、電子部品のずれ量を書き込めばよい。
【0067】
次に、各実装装置20の制御部21は、それぞれ、そのフォーマット2に基づいて自己が実装を担当した電子部品にずれが生じたか否かと、電子部品のずれ量とを判定する(ステップ113)。フォーマット2は、電子部品の部品名と、その電子部品を実装した実装装置の番号と、その電子部品のずれ量とが関連付けられている。従って、各実装装置20の制御部21は、それぞれ、フォーマット2に基づいて、自己が実装を担当した電子部品にずれが生じたか否かと、電子部品のずれ量とを判定することができる。
【0068】
例えば、第1の実装装置20aの制御部21は、フォーマット2の実装装置の番号の欄が1とされている電子部品について、電子部品にずれが発生したか否かと、電子部品のずれ量とを判定する。同様に、第2の実装装置20b及び第3の実装装置20cの制御部21は、フォーマット2の実装装置の番号の欄が2、3とされている電子部品について、電子部品にずれが発生したか否かと、電子部品のずれ量とを判定する。
【0069】
電子部品のずれ量を判定すると、各実装装置20の制御部21は、それぞれ、次に実装を行なう基板1について、電子部品のずれ量に基づいて、ずれ量を修正して基板1上に電子部品を実装する(ステップ114)。
【0070】
ここで、図6及び図7を参照して、図4に示すステップ112〜ステップ114の処理について、一例を挙げて具体的に説明する。
【0071】
図6には、検査装置30が基板1aの検査を終了し、第1の実装装置20a、第2の実装装置20b、第3の実装装置20cがそれぞれ基板1d、1c、1bの実装を終了したときの様子が示されている。
【0072】
図7は、基板1aについての検査が終了して、基板1aについてのフォーマット2aに、電子部品のずれ量が書き込まれたときの、基板1毎のフォーマット2の一例を示す図である。すなわち、図7は、図6に示す時点での基板1毎のフォーマット2の一例を示す図である。図7では、基板1aについて、電子部品I1(インダクタ)の実装位置がずれた場合の一例が示されている。なお、基板1b以降の基板については、この時点では、検査装置30により検査されていない。従って、図7に示すように、基板1b以降の基板に対応するフォーマット2b、2c・・の電子部品のずれ量の欄は、空白とされている。
【0073】
基板1aの検査が終了し、基板1aについてのフォーマット2aにずれ量が書き込まれた場合(ステップ112)、各実装装置20の制御部21は、基板1aについてのフォーマット2aを参照する。そして、各実装装置20の制御部21は、基板1aについてのフォーマット2aに基づいて、自己が実装を担当した電子部品にずれが生じたか否かと、電子部品のずれ量とを判定する(ステップ113)。
【0074】
この場合、第1の実装装置20aの制御部21は、基板1aのフォーマット2aにおいて、実装装置の番号が1とされている電子部品について、電子部品にずれが発生したか否かと、電子部品のずれ量とを判定する。第2の実装装置20bは、実装装置の番号が2とされている箇所を参照すればよく、第3の実装装置20cは、実装装置の番号が3とされている箇所を参照すればよい。
【0075】
図7に示す例では、基板1aのフォーマット2aにおいて、第3の実装装置20cが実装を担当した電子部品I1(インダクタ)が、正規の位置からX方向に−1mm、Y方向に0.8mmずれた場合が示されている。従って、この場合、第3の実装装置20cの制御部21は、次に実装を行なう基板1では、電子部品I1のずれ量を修正するために、電子部品I1をX方向に+1mm、Y方向に−0.8mmずれた位置に電子部品C1を実装する(ステップ114)。
【0076】
図6を参照して、この時点で、第3の実装装置20cが、次に実装を行なう基板1は、第2の実装装置20bから受け渡される基板1cである。従って、この場合、第3の実装装置20cは、次に実装を行なう基板1cにおいて、電子部品のずれ量を修正することになる。第3の実装装置20cがその後に実装を行なう基板1d、1e・・は、基板1cと同様に、ずれ量が修正された位置に電子部品が実装されることになる。
【0077】
なお、第1の実装装置20aが、次に実装を行なう基板1は、基板1eである。従って、基板1aについて、第1の実装装置20aが実装を担当した電子部品のうち何れかの電子部品にずれが生じていた場合、第1の実装装置20aの制御部21は、次に実装を行なう基板1eにおいて、電子部品のずれ量を修正することになる。
【0078】
また、第2の実装装置20bが、次に実装を行なう基板1は、基板1dである。従って、基板1aについて、第2の実装装置20bが実装を担当した電子部品のうち何れかの電子部品にずれが生じていた場合、第2の実装装置20bの制御部21は、次に実装を行なう基板1dにおいて、電子部品のずれ量を修正することになる。
【0079】
なお、図4に示す例では、ステップ113において、各実装装置20が、それぞれ、フォーマット2に基づいて、自己が実装を担当した電子部品にずれか発生したか否かと、その電子部品についてのずれ量を判定する場合について説明した。しかし、この処理は、制御装置10が実行してもよい。この場合、制御装置10の制御部11は、フォーマット2に基づいて、どの実装装置20が実装したどの電子部品にずれが生じたかを判定する。そして、制御装置10の制御部11は、ずれた位置に電子部品を実装した実装装置20に対して、ずれた位置に実装された電子部品のずれ量を修正させる信号を送信すればよい。
【0080】
次に、実装装置20による電子部品の実装の担当が変更された場合の実装システム100の処理について、一例を挙げて詳細に説明する。
【0081】
図8は、実装装置20による電子部品の実装の担当が変更された場合の実装システム100の処理を説明するための補足図である。図8には、検査装置30が基板1lの検査を終了し、第1の実装装置20a、第2の実装装置20b、第3の実装装置20cが、基板1o、1n、1mの実装を終了したときの様子が示されている。
【0082】
図9は、図8に示す時点での基板1毎のフォーマット2の一例を示す図である。図9では、制御装置10の記憶部12に記憶されたフォーマット2が示されている。
【0083】
ここで、例えば、制御装置10の制御部11が、実装タクトの向上のために、電子部品I1の実装の担当を、第3の実装装置20cから第2の実装装置20bに変更することを決定した場合を想定する。
【0084】
この場合、制御装置10の制御部11は、電子部品の実装が開始されていない基板1p(これから第1の実装装置20aが電子部品を実装する基板1p)(図8参照)のフォーマット2pについて、電子部品I1に対応する実装装置の番号を3から2へ変更する処理を実行する(ステップ101)。なお、基板1q以降の基板1に対応するフォーマット2q、2r・・・についても、電子部品I1に対応する実装装置の番号を3から2へ変更する処理が実行される。
【0085】
これにより、基板1o以前の基板1についてのフォーマット2では、電子部品I1に対応する実装装置の番号の欄の数字が3とされているのに対して、基板1p以降の基板1についてのフォーマット2p、2q・・・では、その欄が2とされる。
【0086】
各実装装置20が基板1pに電子部品を実装するとき、各実装装置20は、それぞれ、基板1pについてのフォーマット2p内における実装装置の番号の欄を参照して自己が担当する部品を判定し、電子部品を基板1上に実装する(ステップ113、114)。このとき、フォーマット2pでは、電子部品I1についての実装装置の番号が3から2へ番号が書き換えられているので、電子部品I1は、基板1p以降では、第2の実装装置20bにより実装されることになる。
【0087】
ここでの説明では、図8に示す状態のときに実装担当の変更が決定された場合に、基板1p以降の基板1に対応するフォーマット2p、2q・・・について、電子部品I1に対応する実装装置の番号を3から2へ変更する場合について説明した。しかし、この時点で、第2の実装装置20bは、基板1oの実装をまだ開始していない。従って、制御装置10の制御部11は、図8に示す状態のときに実装担当の変更を決定した場合、基板1o以降の基板1に対応するフォーマット2o、2p・・について、電子部品I1に対応する実装装置の番号を3から2へ変更する処理を実行してもよい。このように、制御装置10の制御部11は、番号変更後の番号に対応する実装装置20が、まだ実装を開始していない基板1について、その基板1に対応するフォーマット2の実装装置の番号を変更する処理を実行してもよい。
【0088】
図10は、基板1pが検査装置30まで移動して、基板1pの検査が終了したときの様子を示す図である。
【0089】
図11は、検査装置30によって基板1pの検査が終了して、基板1pのフォーマット2pに電子部品のずれ量が書き込まれた時点での基板1毎のフォーマット2の一例を示す図である。すなわち、図11は、図10に示す時点でのフォーマット2の一例を示す図である。図11では、基板1pのフォーマット2pにおいて、第2の実装装置20bが実装を担当する電子部品I1(インダクタ)が、正規の位置からX方向に2mm、Y方向に3mmずれた場合が示されている。
【0090】
検査装置30が基板1pの検査を終了し、電子部品のずれ量の情報が制御装置10から各実装装置20に送信されたとき(ステップ111)、各実装装置20は、それぞれ、基板1pのフォーマット2に電子部品のずれ量を書き込んで記憶する(ステップ112)。そして、各実装装置20は、それぞれ、基板1pのフォーマット2pを参照して、基板1pについて、自己が実装を担当した電子部品にずれが発生したかどうかと、電子部品のずれ量を判定する(ステップ113)。
【0091】
ここでの例では、基板1pのフォーマット2pについて、電子部品I1に対応する実装装置の番号の欄は、2とされている。従って、この場合、第2の実装装置20bが、自己が実装を担当した電子部品I1にずれが生じたと判定する。
【0092】
第2の実装装置20bは、基板1pについて、電子部品I1のずれ量を判定すると、次に実装を行なう基板1s以降の基板1(図10参照)について、電子部品I1の実装位置を修正した上で、基板1上に電子部品I1を実装する(ステップ114)。この場合、第2の実装装置20bの制御部21は、電子部品I1のずれ量を修正するために、X方向に−2mm、Y方向に−3mmずらして電子部品I1を基板1上に実装する。
【0093】
このように、本実施形態では、電子部品の実装の担当が変更された場合でも、複数の実装装置20のうち、電子部品をずれた位置に実装した実装装置20に対して、正確に電子部品のずれ量の情報をフィードバックすることができる。すなわち、本実施形態では、実装装置20の分担情報(実装装置の番号の情報)と、電子部品のずれ量の情報とを含むフォーマット2が基板1毎に用意されている。そして、実装装置20による電子部品の実装の担当の変更があった場合に、担当が変更された基板1についてのフォーマット2の分担情報がリアルタイムに変更する処理が実行されている。これにより、基板1毎に、リアルタイムで実装の担当の変更に追従することができるので、複数の実装装置20のうち、電子部品をずれた位置に実装した実装装置20に対して、正確にずれ量の情報をフィードバックすることができる。電子部品をずれた位置に実装した実装装置20は、フォーマット2の電子部品のずれ量に基づいて、電子部品の位置ずれを修正することができる。
【0094】
<第2実施形態>
次に、本技術の第2実施形態について説明する。なお、第2実施形態以降の説明では、上述の第1実施形態と同様の構成及び機能を有する部分については、同一符号を付し、説明を省略又は簡略化する。
【0095】
[実装システムの全体構成及び各部の構成]
図12は、第2実施形態に係る実装システム200を示す図である。図12に示すように、第2実施形態に係る実装システム200は、制御装置10と、複数の実装装置20と、複数の検査装置30とを有する。第2実施形態では、複数の検査装置30が、複数の実装装置20の下流側に一列に連結して配置されている点で、上述の第1実施形態と異なっている。
【0096】
複数の検査装置30は、複数の実装装置20によって電子部品が実装された基板1を分担して検査する。図2に示す例では、検査装置30の数は、3つとされている。なお、3つの検査装置30を特に区別する場合には、基板1が搬送される上流側から順番に、第1の検査装置30a、第2の検査装置30b、第3の検査装置30cと呼ぶ。
【0097】
第1の検査装置30aは、自己が検査を担当する電子部品の検査が終了すると、次の第2の検査装置30bに基板1を受け渡し、第2の検査装置30bは、自己が検査を担当する電子部品の検査が終了すると、第3の検査装置30cへ基板1を受け渡す。第3の検査装置30cは、自己が検査を担当する電子部品の検査が終了すると、例えば、リフロー装置等の装置に基板1を受け渡す。
【0098】
図13は、第2実施形態に係る実装システム200で用いられるフォーマット3の一例を示す図である。このフォーマット3は、検査装置の番号の欄が追加されている点で、上述の第1実施形態と異なっている。すなわち、このフォーマット3は、複数の検査装置30が、それぞれ、複数の電子部品のうちどの電子部品を検査するのかを示す検査装置の分担情報をさらに含んでいる。このフォーマット3は、制御装置10、複数の実装装置20及び複数の検査装置30で共通で用いられる。
【0099】
[動作説明]
第2実施形態に係る実装システム200の動作を説明する。図14は、第2実施形態に係る実装システム200の処理を示すシーケンス図である。なお、制御装置10と、3つの実装装置20との間の処理については、上述の第1実施形態と基本的に同じであるので、第2実施形態の説明では、制御装置10と、複数の検査装置30との間の処理を中心に説明する。
【0100】
制御装置10の制御部11は、検査装置30による電子部品の検査の担当の変更に応じて、検査担当が変更された基板1に対応するフォーマット3の検査装置の番号(検査装置の分担情報)をリアルタイムに変更する処理を実行している(ステップ201)。
【0101】
例えば、3つの検査装置30のうちの何れかの検査装置30で電子部品の位置ずれ等のエラーが検出された場合、エラーが生じた検査装置30は、例えば、マーキング処理などのエラーに対応する処理が必要になる。従って、エラーが生じた検査装置30での検査時間が、エラーが生じていない他の検査装置30の検査時間より長くなる場合がある。このような場合に、エラーが生じた検査装置30が検査を担当していた電子部品を、エラーが生じていない他の検査装置30に割り振る場合がある。
【0102】
図15には第1の検査装置30a、第2の検査装置30b、第3の検査装置30cが基板1o、1n、1mの検査を終了し、第1の実装装置20a、第2の実装装置20b、第3の実装装置20cが基板1r、1q、1pの実装を終了したときの様子が示されている。
【0103】
図16は、図15に示す時点での基板1毎のフォーマット3の一例を示す図である。
【0104】
ここで、例えば、制御装置10の制御部11が、タクトの向上のために、電子部品I1の検査の担当を、第3の検査装置30cから第2の検査装置30bに変更することを決定した場合を想定する。
【0105】
この場合、制御装置10の制御部11は、電子部品の検査が開始されていない基板1p(これから第1の検査装置30aが電子部品を検査する基板1p)(図15参照)のフォーマット3pについて、電子部品I1に対応する検査装置の番号を3から2へ変更する処理を実行する(ステップ201)。なお、基板1q以降の基板1についてのフォーマット3q、3r・・・についても、電子部品I1に対応する検査装置の番号を3から2へ変更する処理が実行される。
【0106】
ここでの説明では、図15に示す状態のときに検査担当の変更が決定された場合に、基板1p以降の基板1に対応するフォーマット3p、3q・・について、電子部品I1に対応する検査装置の番号を3から2へ変更する場合について説明した。しかし、この時点で、第2の検査装置30bは、基板1oの検査をまだ開始していない。従って、制御装置10の制御部11は、図15に示す状態のときに検査担当の変更が決定された場合に、基板1o以降の基板1に対応するフォーマット3o、3p・・について、電子部品I1に対応する検査装置の番号を3から2へ変更する処理を実行してもよい。すなわち、制御装置10の制御部11は、番号変更後の番号に対応する検査装置30が、まだ検査を開始していない基板1について、その基板1に対応するフォーマット3の検査装置の番号を変更する処理を実行してもよい。
【0107】
各検査装置30の制御部31は、それぞれ、次に検査を行なう基板1に対応するフォーマット3の送信要求の信号を、通信部33を介して制御装置10に送信する(ステップ202)。図15に示す例では、第1の検査装置30a、第2の検査装置30b、第3の検査装置30cが、次に検査を行なう基板1は、基板1p、1o、1nである。従って、この場合、第1の検査装置30a、第2の検査装置30b、第3の検査装置30cは、基板1p、1o、1nに対応するフォーマット3p、3o、3nの送信要求の信号を制御装置10に送信する。
【0108】
制御装置10の制御部11は、各検査装置30からフォーマット3の送信要求の信号を受信すると、各検査装置30に対して、要求されたフォーマット3を送信する(ステップ203)。
【0109】
各検査装置30の制御部31は、それぞれ通信部33を介して制御装置10からフォーマット3を受信すると、受信したフォーマット3を記憶部32に記憶する。そして、各検査装置30の制御部31は、それぞれ、フォーマット3に基づいて自己が検査を担当する電子部品を判定する(ステップ204)。フォーマット3は、電子部品の部品名と、その電子部品についての検査装置の番号とが関連づけられているので、各検査装置30は、それぞれ、フォーマット3に基づいて、自己が検査を担当する電子部品を判定することができる。
【0110】
例えば、第1の検査装置30aの制御部31は、基板1pに対応するフォーマット3p内の検査装置の番号の欄が1とされている電子部品の検査を担当すると判定する。また、例えば、第2の検査装置30b、第3の検査装置30cの制御部31は、基板1o、基板1nに対応するフォーマット3o、3n内の検査装置の番号の欄が2、3とされている電子部品の検査を担当すると判定する。
【0111】
そして、各検査装置30は、それぞれ、担当の電子部品について、電子部品のずれ量を算出する(ステップ205)。この場合、各検査装置30の制御部31は、それぞれ、実際の電子部品の位置と、電子部品の正規の位置(フォーマット3内の電子部品の実装位置)とを比較して、電子部品のずれ量を算出する。
【0112】
電子部品のずれ量を算出すると、各検査装置30は、それぞれ、検査した基板1のフォーマット3に電子部品のずれ量を書き込む(ステップ206)。例えば、第1の検査装置30a、第2の検査装置30b、第3の検査装置30cは、基板1p、1o、1nに対応するフォーマット3p、3o、3qに、検査したずれ量を書き込む。そして、各検査装置30は、それぞれ、電子部品のずれ量の情報を制御装置10に対して送信する(ステップ207)。
【0113】
ここで、基板1pに対応するフォーマット3pでは、電子部品I1についての実装装置の番号が3から2へ番号が変更されている。従って、基板1p以降では、電子部品I1は、第2の実装装置20bにより検査されることになる。
【0114】
このように、本実施形態では、検査装置30による電子部品の検査の担当の変更に柔軟に対応することができる。
【0115】
制御装置10の制御部11は、各検査装置30から電子部品のずれ量の情報を受信すると、受信されたずれ量をフォーマット3に書き込む(ステップ208)。そして、制御装置10の制御部11は、電子部品のずれ量の情報を各実装装置20へ送信する(ステップ209)。
【0116】
各実装装置20の制御部21は、制御装置10から電子部品のずれ量の情報を受信すると、フォーマット3にずれ量を書き込んで記憶部22に記憶させる。そして、各実装装置20は、それぞれ、そのフォーマット3から自己が実装を担当した電子部品にずれが生じたか否かと、電子部品のずれ量とを判定する。電子部品のずれ量を判定すると、各実装装置20の制御部21は、それぞれ、次に実装を行なう基板1について、電子部品のずれ量に基づいて、ずれ量を修正して基板1上に電子部品を実装する。
【0117】
第2実施形態の説明では、複数の実装装置20の下流側に、複数の検査装置30が配置される場合について説明した。一方、第1の実装装置20a、第1の検査装置30a、第2の実装装置20b、第2の検査装置30b・・のように、実装装置20と検査装置30とが交互に配列されていてもよい。この場合、実装装置20のすぐ後ろ側に配置された検査装置30により、その実装装置により実装された電子部品を検査することで、検査結果のフィードバックにかかる時間を短縮することができる。
【0118】
<第3実施形態>
次に、本技術の第3実施形態について説明する。
【0119】
[実装システムの全体構成及び各部の構成]
図17は、第3実施形態に係る実装システム300を示す図である。図17に示すように、第3実施形態に係る実装システム300は、各装置を制御する制御装置10を有している。また、実装システム300は、基板1の搬送方向の上流側から順番に、投入装置40と、半田形成装置50と、半田検査装置60と、複数の実装装置20と、複数の検査装置30と、リフロー装置70と、最終検査装置80と、格納装置90とを有している。
【0120】
投入装置40は、半田形成装置50に基板1を投入する。投入装置40は、投入装置40の各部を統括的に制御する制御部と、揮発性メモリ及び不揮発性メモリを含む記憶部と、他の装置と通信するための通信部と、半田形成装置50に基板1を投入する投入機構とを含む。
【0121】
半田形成装置50は、電子部品が実装される位置に対応する位置に半田を形成し、半田が形成された基板1を半田検査装置60に受け渡す。半田形成装置50としては、例えば、クリーム半田を基板1上に印刷するクリーム半田印刷装置、あるいは、クリーム半田をノズルから吐出して塗布する半田塗布装置等が挙げられる。
【0122】
半田形成装置50は、半田形成装置50の各部を統括的に制御する制御部と、揮発性メモリ及び不揮発性メモリを含む記憶部と、他の装置と通信するための通信部と、基板1上に半田を形成する半田形成機構とを含む。
【0123】
半田検査装置60は、半田形成装置50により半田が形成された基板1を検査して、基板1を第1の実装装置20aに受け渡す。半田検査装置60は、半田検査装置60の各部を統括的に制御する制御部と、揮発性メモリ及び不揮発性メモリを含む記憶部と、他の装置と通信するための通信部と、基板1上に形成された半田を検査する半田検査機構とを含む。半田検査機構は、半田が形成された基板1を撮像する撮像部を含む。
【0124】
複数の実装装置20及び複数の検査装置30は、上述の各実施形態と同様の構成であるので、詳細については、省略する。
【0125】
リフロー装置70は、第3の検査装置30cから受け渡された基板1をリフロー処理し、リフロー処理後の基板1を最終検査装置80に受け渡す。リフロー装置70は、リフロー装置70の各部を統括的に制御する制御部と、揮発性メモリ及び不揮発性メモリを含む記憶部と、他の装置と通信するための通信部と、基板1をリフロー処理する加熱機構とを含む。
【0126】
最終検査装置80は、リフロー処理後の基板1を最終検査し、格納装置90に受け渡す。最終検査装置80は、検査装置30と基本的に同様の構成であるので、詳細については省略する。
【0127】
格納装置90は、最終検査装置80から受け渡された基板1をストッカーに格納する。格納装置90は、格納装置90の各部を統括的に制御する制御部と、揮発性メモリ及び不揮発性メモリを含む記憶部と、他の装置と通信するための通信部と、基板1をストッカーに格納する格納機構とを含む。
【0128】
図18は、第3実施形態に係る実装システム300で用いられるフォーマットの一例を示す図である。このフォーマット4は、第1実施形態及び第2実施形態と同様に、基板1毎に用意されている。
【0129】
このフォーマット4は、電子部品に対応する位置に形成される半田の欄と、半田が形成される位置(X座標、Y座標及び基準に対する傾きθ)の欄とが追加されている。また、半田それぞれについての半田のずれ量(X方向、Y方向及びθ方向のずれ量)の欄が追加されている点で上述の各実施形態で用いられたフォーマット2、3と異なっている。すなわち、フォーマット4は、半田形成装置50により基板1上に形成された半田が正規の位置からどの程度ずれたかを示す半田のずれ量の情報をさらに有している。
【0130】
また、フォーマット4は、最終的な電子部品のずれ量(X方向、Y方向及びθ方向のずれ量)の欄が追加されている。すなわち、フォーマット4は、リフロー装置70によってリフロー処理された基板1上の電子部品が正規の位置からどの程度ずれたかを示す最終的な電子部品のずれ量の情報をさらに有している。このフォーマット4は、半田形成装置50、半田検査装置60、複数の実装装置20、複数の検査装置30、最終検査装置80で共通で用いられる。
【0131】
[動作説明]
第3実施形態に係る実装システム300の動作について説明する。まず、制御装置10、半田形成装置50及び半田検査装置60の処理について説明する。図19は、制御装置10、半田形成装置50及び半田検査装置60の動作を示すシーケンス図である。
【0132】
半田形成装置50の制御部は、次に半田を形成する基板1に対応するフォーマット4の送信要求の信号を、通信部を介して制御装置10に送信する(ステップ301)。半田検査装置60の制御部は、次に検査を行なう基板1に対応するフォーマット4の送信要求の信号を、通信部を介して制御装置10に送信する(ステップ302)。
【0133】
制御装置10の制御部11は、フォーマット4の送信要求の信号を受信すると、要求されたフォーマット4を、半田形成装置50、半田検査装置60に送信する(ステップ303)。
【0134】
半田形成装置50は、フォーマット4を受信すると、基板1上に半田を形成する(ステップ304)。ここで、半田形成装置50が半田をノズルから吐出して塗布する半田塗布装置である場合、半田塗布装置は、半田の形成位置(X座標、Y座標及び基準に対する傾きθ)の情報に基づいて、基板1上に半田を形成してもよい。なお、半田形成装置50が、半田を基板1上に印刷する半田印刷装置である場合には、半田印刷時にフォーマット4内の情報は、用いられなくてもよい。
【0135】
半田検査装置60は、フォーマット4を受信すると、そのフォーマット4に対応する基板1を検査する(ステップ305)。この場合、半田検査装置60の制御部は、撮像部により基板1を撮像し、撮像部により撮像された画像を解析して半田の実際の位置を判定する。そして、実際の半田の位置と、半田の正規の位置(フォーマット4内の半田の形成位置)とを比較して、半田のずれ量を算出する。
【0136】
半田検査装置60の制御部は、半田のずれ量を算出すると、半田のずれ量をフォーマット4内の半田のずれ量の欄に書き込んで記憶部に記憶する(ステップ306)。そして、半田検査装置60の制御部は、半田のずれ量の情報を制御装置10へ送信する(ステップ307)。
【0137】
制御装置10の制御部11は、半田のずれ量の情報を受信すると、半田検査装置60によって検査された基板1に対応するフォーマット4内の半田のずれ量の欄に、半田のずれ量を書き込んで記憶する(ステップ308)。そして、半田のずれ量の情報を半田形成装置50へ送信する(ステップ309)。
【0138】
半田形成装置50の制御部は、半田のずれ量の情報を受信すると、半田検査装置60によって検査された基板1に対応するフォーマット4内の半田のずれ量の欄に、半田のずれ量を書き込んで記憶する(ステップ310)。次に、半田形成装置50の制御部は、フォーマット4内の半田のずれ量の情報に基づいて、半田のずれ量を判定する(ステップ311)。そして、半田形成装置50は、次に半田を形成する基板1について、半田のずれ量に基づいて、半田の形成位置を修正する(ステップ312)。これにより、半田の位置ずれが適切に修正される。
【0139】
次に、制御装置10及び最終検査装置80の処理を説明する。
【0140】
最終検査装置80の制御部は、次に検査を行なう基板1に対応するフォーマット4の送信要求の信号を制御装置10に送信する。制御装置10の制御部11は、要求されたフォーマット4を最終検査装置80へ送信する。
【0141】
最終検査装置80の制御部は、制御装置10からフォーマット4を受信すると、フォーマット4を記憶部に記憶させ、フォーマット4に基づいて、電子部品のずれ量を算出する。フォーマット4は、電子部品の実装位置の情報を含むので、最終検査装置80は、フォーマット4に基づいて、電子部品のずれ量を算出することができる。
【0142】
最終検査装置80の制御部は、電子部品のずれ量を算出すると、検査した基板1に対応するフォーマット4内の最終ずれ量の欄に、電子部品のずれ量を書き込んで記憶部に記憶する。そして、電子部品のずれ量の情報を制御装置10へ送信する。
【0143】
制御装置10の制御部11は、最終検査装置80からずれ量の情報を受信すると、ずれ量が検査された基板1に対応するフォーマット4内の最終ずれ量の欄に、電子部品のずれ量を書き込んで記憶部12に記憶させる。そして、制御装置10の制御部11は、電子部品のずれ量の情報を各実装装置20に送信する。これにより、電子部品のずれ量が各実装装置20にフィードバックされる。
【0144】
各実装装置20の制御部21は、制御装置10からずれ量の情報を受信すると、ずれ量が検査された基板1に対応するフォーマット4内の最終ずれ量の欄に、電子部品のずれ量を書き込んで記憶部22に記憶させる。そして、各実装装置20は、そのフォーマット4から自己が実装を担当した電子部品にずれが生じたか否かと、電子部品のずれの量とを判定する。電子部品のずれが発生した場合には、各実装装置20の制御部21は、次に実装を行なう基板1について、電子部品のずれ量に基づいて、ずれ量を修正して基板1上に電子部品を実装する。これにより、電子部品の位置ずれが適切に修正される。
【0145】
なお、制御装置10、複数の制御装置10、複数の検査装置30の動作については、上述の各実施形態とは異なるフォーマット4が使用される点を除いて、基本的に、上述の各実施形態と同様である。
【0146】
ここで、第3実施形態では、各実装装置20が基板1を実装するとき、その基板1に対応するフォーマット4には、既に半田のずれ量が書き込まれている。この半田ずれ量を有効活用することもできる。例えば、各実装装置20の制御部21は、半田のずれ量に基づいて、正規の位置からずれた位置に形成された半田上に、電子部品を実装してもよい。
【0147】
ここで、半田は、基板1の表面に形成されたソルダーレジストが開口された領域に形成される場合が多い。従って、半田が正規の位置から多少ずれた位置に形成されたとしても、半田は、リフロー装置70のリフロー処理の際に、ソルダーレジストにより自動的に正規の位置に移動され場合が多い。従って、ずれた半田上に電子部品を実装した場合、電子部品も半田の移動により自動的に正規の位置に移動される。
【0148】
第3実施形態の説明では、半田検査装置60が1つである場合について説明したが、半田検査装置60は、複数であってもよい。複数の半田検査装置60は、複数の半田を分担して検査する。この場合、半田検査装置の番号の欄がフォーマット4に追加される。また、第3実施形態の説明では、最終検査装置80が1つである場合について説明したが、最終検査装置80は、複数であってもよい。複数の最終検査装置80は、複数の電子部品を分担して検査する。この場合、最終検査装置の番号の欄がフォーマット4に追加される。
【0149】
本技術は、以下の構成もとることができる。
(1)複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットを記憶する記憶部と、
前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる制御部と
を具備する実装システム。
(2)上記(1)に記載の実装システムであって、
前記電子部品のずれ量の情報は、複数の検査装置によって分担して検査され、
前記フォーマットは、前記複数の検査装置が、それぞれ、前記複数の電子部品のうちどの前記電子部品を検査するのかを示す検査装置の分担情報をさらに有し、
前記制御部は、前記検査装置による前記電子部品の検査の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記検査装置の分担情報を変更する
実装システム。
(3)上記(1)又は(2)に記載の実装システムであって、
前記フォーマットは、前記電子部品が実装される前記基板上の位置に半田を形成する半田形成装置によって前記半田が形成された前記基板を検査する半田検査装置により検査され、前記半田形成装置により前記基板上に形成された半田が正規の位置からどの程度ずれたかを示す半田のずれ量の情報をさらに有し、
前記制御部は、前記半田形成装置に、前記フォーマットの前記半田のずれ量の情報に基づいて、前記半田の形成位置を修正させる
実装システム。
(4)上記(3)に記載の実装システムであって、
前記制御部は、前記複数の実装装置に、それぞれ、前記半田のずれ量の情報に基づいて、正規の位置からずれた位置に形成された前記半田上に前記電子部品を実装させる
実装システム。
(5)複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる
電子部品の実装方法。
(6)複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる
基板の製造方法。
(7)コンピュータに、
複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更するステップと、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させるステップと
を実行させるプログラム。
【符号の説明】
【0150】
1…基板
2、3、4…フォーマット
10…制御装置
11、21、31…制御部
12、22、32…記憶部
13、23、33…通信部
20…実装装置
30…検査装置
40…投入装置
50…半田形成装置
60…半田検査装置
70…リフロー装置
80…最終検査装置
90…格納装置
100、200、300…実装システム
【特許請求の範囲】
【請求項1】
複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットを記憶する記憶部と、
前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる制御部と
を具備する実装システム。
【請求項2】
請求項1に記載の実装システムであって、
前記電子部品のずれ量の情報は、複数の検査装置によって分担して検査され、
前記フォーマットは、前記複数の検査装置が、それぞれ、前記複数の電子部品のうちどの前記電子部品を検査するのかを示す検査装置の分担情報をさらに有し、
前記制御部は、前記検査装置による前記電子部品の検査の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記検査装置の分担情報を変更する
実装システム。
【請求項3】
請求項1に記載の実装システムであって、
前記フォーマットは、前記電子部品が実装される前記基板上の位置に半田を形成する半田形成装置によって前記半田が形成された前記基板を検査する半田検査装置により検査され、前記半田形成装置により前記基板上に形成された半田が正規の位置からどの程度ずれたかを示す半田のずれ量の情報をさらに有し、
前記制御部は、前記半田形成装置に、前記フォーマットの前記半田のずれ量の情報に基づいて、前記半田の形成位置を修正させる
実装システム。
【請求項4】
請求項3に記載の実装システムであって、
前記制御部は、前記複数の実装装置に、それぞれ、前記半田のずれ量の情報に基づいて、正規の位置からずれた位置に形成された前記半田上に前記電子部品を実装させる
実装システム。
【請求項5】
複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる
電子部品の実装方法。
【請求項6】
複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる
基板の製造方法。
【請求項7】
コンピュータに、
複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更するステップと、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させるステップと
を実行させるプログラム。
【請求項1】
複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットを記憶する記憶部と、
前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる制御部と
を具備する実装システム。
【請求項2】
請求項1に記載の実装システムであって、
前記電子部品のずれ量の情報は、複数の検査装置によって分担して検査され、
前記フォーマットは、前記複数の検査装置が、それぞれ、前記複数の電子部品のうちどの前記電子部品を検査するのかを示す検査装置の分担情報をさらに有し、
前記制御部は、前記検査装置による前記電子部品の検査の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記検査装置の分担情報を変更する
実装システム。
【請求項3】
請求項1に記載の実装システムであって、
前記フォーマットは、前記電子部品が実装される前記基板上の位置に半田を形成する半田形成装置によって前記半田が形成された前記基板を検査する半田検査装置により検査され、前記半田形成装置により前記基板上に形成された半田が正規の位置からどの程度ずれたかを示す半田のずれ量の情報をさらに有し、
前記制御部は、前記半田形成装置に、前記フォーマットの前記半田のずれ量の情報に基づいて、前記半田の形成位置を修正させる
実装システム。
【請求項4】
請求項3に記載の実装システムであって、
前記制御部は、前記複数の実装装置に、それぞれ、前記半田のずれ量の情報に基づいて、正規の位置からずれた位置に形成された前記半田上に前記電子部品を実装させる
実装システム。
【請求項5】
複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる
電子部品の実装方法。
【請求項6】
複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更し、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させる
基板の製造方法。
【請求項7】
コンピュータに、
複数の電子部品を分担して基板上に実装する複数の実装装置が、それぞれ、前記複数の電子部品のうちどの電子部品を前記基板上に実装するのかを示す実装装置の分担情報と、前記複数の電子部品が実装された前記基板を検査する検査装置によって検査され、前記基板上に実装された前記複数の電子部品がそれぞれ前記基板上の正規の位置からどの程度ずれたのかを示す電子部品のずれ量の情報とをそれぞれ有する基板毎の複数のフォーマットについて、前記実装装置による前記電子部品の実装の担当の変更に応じて、担当が変更された基板に対応するフォーマットの前記実装装置の分担情報を変更するステップと、
前記複数の実装装置のうち、前記分担情報に基づいて特定される、前記電子部品を実装した前記実装装置に、前記電子部品のずれ量の情報に基づいて、ずれ量を修正して前記基板上に前記電子部品を実装させるステップと
を実行させるプログラム。
【図1】



【図2】

【図3】

【図4】
【図5】
【図6】

【図7】

【図8】

【図9】
【図10】

【図11】

【図12】

【図13】

【図14】

【図15】

【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2012−231010(P2012−231010A)
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願番号】特願2011−98335(P2011−98335)
【出願日】平成23年4月26日(2011.4.26)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願日】平成23年4月26日(2011.4.26)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]