
実装方法および実装装置
【課題】 ピラーバンプなどの微細な半田バンプが形成されたチップを基板に熱圧着する実装方法において、ピラーバンプが基板の電極に良好に熱圧着されかどうかを判定することができる実装方法および実装装置を提供すること。
【解決手段】 チップを熱圧着ツールで保持して基板側に下降させる工程と、チップのピラーバンプが基板の電極に接触した後、チップを保持する熱圧着ツールの温度を半田溶融温度に昇温する工程と、予め設定されている押し込み量だけ、チップを基板側に押し込み、押し込みが完了した際の、基板の電極からの反力を測定する第1の反力測定工程と、ピラーバンプに設けられた半田溶融した際の基板の電極からの反力を測定する第2の反力測定工程と、前記第1の反力測定工程の測定結果と、前記第2の反力測定工程の測定結果から、溶融したピラーバンプと電極の位置合わせの良否を判定する反力判定工程と、を有する実装方法および実装装置を提供する。
【解決手段】 チップを熱圧着ツールで保持して基板側に下降させる工程と、チップのピラーバンプが基板の電極に接触した後、チップを保持する熱圧着ツールの温度を半田溶融温度に昇温する工程と、予め設定されている押し込み量だけ、チップを基板側に押し込み、押し込みが完了した際の、基板の電極からの反力を測定する第1の反力測定工程と、ピラーバンプに設けられた半田溶融した際の基板の電極からの反力を測定する第2の反力測定工程と、前記第1の反力測定工程の測定結果と、前記第2の反力測定工程の測定結果から、溶融したピラーバンプと電極の位置合わせの良否を判定する反力判定工程と、を有する実装方法および実装装置を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、フリップチップに設けられた柱状のピラーの先端に半田が形成されたピラーバンプ付きのフリップチップを基板に熱圧着する実装方法および実装装置に関するものである。
【背景技術】
【0002】
近年、高密度実装の要求から半田バンプも電極間隔を狭め、バンプの構造も丸みをおびたボールバンプから、柱状の形状のものが用いられるようになっている。特許文献1には、バンプピッチを超微細にした柱状のピラーバンプが、開示されている。ピラーバンプは、狭ピッチで立設したCu等のピラー(円柱状)の先端に半球状の半田を形成している。先端の半田は、半球状の場合もあるし、先端部を楕円状に平坦化させたものもある。そのため、バンプピッチを従来の半田ボールタイプの半田バンプに比べて微細にすることができる。また高密度実装に対応することができる。これらの半田部分は、ピラー(円柱)の底面の面積が微小面積であるため、従来の半田ボールタイプの半田バンプに比べて、極めて少ない量の半田で半田接合部分が形成されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−245288号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このようなピラーバンプが形成されたチップを、基板に熱圧着し接合状態を検査しようとすると次のような問題がある。
【0005】
チップと基板の位置合わせは、チップおよび基板に設けられた位置合わせマークを画像認識し、画像認識データに基づいて、チップを保持する熱圧着ツールもしくは基板を保持する基板ステージを駆動して位置合わせしている。そのため、位置合わせマークに基づいてチップと基板が位置合わせされていても、ピラーバンプと基板の電極のセンター位置が所定範囲を超えていると、チップを押圧する際に、ピラーバンプが電極からズレおちる問題がある(特に、バンプピッチが微細化されたピラーバンプでは、位置合わせのマージンが狭く、ピラーバンプと電極の位置合わせが困難な状況となっている)。ピラーバンプが電極からズレおちた状態のチップと基板の接合は、回路のショートなど、不具合を招く要因となる。
【0006】
また、ピラーバンプの先端に設けられている半田の量が、従来のボールバンプに比べて少ないため、ヒータによる半田の加熱と、チップの押圧力のバランスによっては、ピラーと電極の間で溶融した半田が押し潰されて、電極の接合面からはみ出してしまう問題もある。
【0007】
そこで、本発明の課題は、ピラーバンプなどの微細な半田バンプが形成されたチップを基板に熱圧着する実装方法において、ピラーバンプが基板の電極に良好に熱圧着されかどうかを判定することができる実装方法および実装装置を提供することとする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、請求項1に記載の発明は、
チップに設けられたピラーバンプを、基板に設けられた電極に、押圧しながら加熱し熱圧着する実装方法であつて、
チップを熱圧着ツールで保持して基板側に下降させる工程と、
チップのピラーバンプが基板の電極に接触した後、
チップを保持する熱圧着ツールの温度を半田溶融温度に昇温する工程と、
予め設定されている押し込み量だけ、チップを基板側に押し込み、押し込みが完了した際の、基板の電極からの反力を測定する第1の反力測定工程と、
ピラーバンプに設けられた半田溶融した際の基板の電極からの反力を測定する第2の反力測定工程と、
前記第1の反力測定工程の測定結果と、前記第2の反力測定工程の測定結果から、溶融したピラーバンプと電極の位置合わせの良否を判定する反力判定工程と、を有する実装方法である。
【0009】
請求項2に記載の発明は、請求項1の発明において、
チップのピラーバンプが基板の電極に接触した後、
チップを保持している熱圧着ツールの昇降位置を測定する第1の高さ測定工程と、
予め設定されている圧力で、予め設定されている時間、チップを基板側に押圧した後、
チップを保持している熱圧着ツールの昇降位置を測定する第2の高さ測定工程と、
前記第1の高さ測定工程の測定結果と、前記第2の高さ測定工程の測定結果から、チップを押圧したことによるチップと基板の間隔の変化を求め、半田溶融前のピラーバンプと電極の位置合わせの良否を判定する沈み込み量判定工程を有する実装方法である。
【0010】
請求項3に記載の発明は、
ピラーバンプが設けられたチップを保持する熱圧着ツールと、
チップのピラーバンプが接合される電極を有した基板を保持する基板ステージと、
チップを保持した熱圧着ツールを、基板を保持した基板ステージ側に、昇降させる駆動手段と、
チップを保持した熱圧着ツールの昇降位置を検出する高さ検出手段と、
チップを保持した熱圧着ツールが基板を押圧する際の、押圧力を検出する荷重検出手段と、
熱圧着ツールの温度を昇温するヒータと、
前記高さ検出手段でチップ高さ位置情報を測定し、前記荷重検出手段でチップへの押圧力を測定し、前記駆動手段と前記ヒータとを制御する制御手段とを備えた実装装置であって、
前記制御手段が、
前記ヒータを半田溶融温度に昇温し、前記駆動手段を駆動し熱圧着ツールを基板側に予め設定されている押し込み量だけ押し込んだ際の、前記荷重検出手段で測定した検出荷重と、ピラーバンプに設けられた半田が溶融した際の検出荷重から、溶融したピラーバンプと電極の位置合わせの良否を判定する機能を有する実装装置である。
【0011】
請求項4に記載の発明は、請求項3の発明において、
前記制御手段が、
チップのピラーバンプが基板の電極に接触した後、
予め設定されている圧力で、予め設定されている時間、チップを基板側に押圧し、押圧したことによるチップと基板の間隔に変化から、溶融前のピラーバンプと電極の位置合わせの良否を判定する機能を有する実装装置である。
【発明の効果】
【0012】
請求項1に記載の発明によれば、ピラーバンプを備えたチップを熱圧着ツールで保持して基板側に下降している。そして、チップのピラーバンプが基板の電極に接触した後、チップを保持する熱圧着ツールの温度を半田溶融温度に昇温している。そして、熱圧着ツールの温度がピラーバンプに伝わる間に、チップを基板側に、予め設定されている押し込み量だけ押し込んでいる。そして、チップの押し込みが完了した際の、基板の電極からの反力を、熱圧着ツールに設けられた荷重検出手段で測定し、制御手段に第1の反力測定結果として記憶している(第1の反力測定工程)。一方、熱圧着ツールの温度がピラーバンプに伝わることによりピラーバンプに設けられた半田の溶融が進んでいく。そのため、予め設定された押し込み量の状態で、熱圧着ツールが昇降位置を保持していても、ピラーバンプの半田が溶融すると、基板の電極からの反力は少しずつ低下していく。
【0013】
そのため、請求項1の発明では、ピラーバンプに設けられた半田が溶融するまでの、予め設定されている時間(ピラーバンプの半田の溶融が完了する時間)経過した後、基板の電極からの反力を測定し、制御手段に第2の反力測定結果として記憶している(第2の反力測定工程)。そして、制御手段に記憶した第1の反力測定結果と、第2の反力測定結果とから溶融したピラーバンプと電極の位置合わせの良否を判定している(反力判定工程)。
【0014】
ピラーバンプと電極の位置ずれが発生していると、溶融したピラーバンプの半田が基板の電極の接合面からはみだした状態となる。溶融した半田全体を、電極の接合面で支える場合に比べて、電極からはみでている分、電極からの反力は低下する。
【0015】
より具体的には、第1の反力測定工程では、ピラーバンプの半田は完全に溶融していないため、電極の接触面(ピラーバンプが当接する面)にピラーバンプが位置合わせされていれば、電極の接触面から多少はみ出ていても、所定の押し込み量だけチップを押し込んでも、所定の範囲の反力を電極から受けることができる。しかし、ピラーバンプの半田が溶融した状態では、電極の接触面の全てで、ピラーバンプの半田が電極の接合面全体で支えている場合と、ピラーバンプの半田の一部が電極からはみ出ている場合では反力の違いが生じる。第2の反力測定工程は、ピラーバンプの半田が溶融した状態となるため、電極の接合面から半田がはみ出ている場合は、チップを押し込むことによる電極からの反力が、電極の接触面の全てで支えている場合に比べて低下して検出される。
【0016】
これらの反力の測定結果(第1の反力測定工程の測定結果と、第2の反力測定工程の測定結果)から、チップのピラーバンプと、基板の電極が良好に位置合わせされ、熱圧着されたかを判定することができる(反力判定工程)。
【0017】
請求項2に記載の発明によれば、請求項1に記載の発明において、さらに、ピラーバンプを備えたチップを熱圧着ツールで保持して基板側に下降し、チップのピラーバンプが基板の電極に接触した後、チップを保持している熱圧着ツールの昇降位置を測定している(第1の高さ測定工程)。
【0018】
そして、予め設定されている圧力で、予め設定されている時間だけ、チップを基板側に押圧した後、チップを保持している熱圧着ツールの昇降位置を測定している(第2の高さ測定工程)。
【0019】
そして、第1の高さ測定工程の測定結果と、第2の高さ測定工程の測定結果から、押圧したことによるチップと基板の間隙の変化を求め、半田溶融前のピラーバンプと電極の位置合わせを判定している(沈み込み量判定工程)。
【0020】
チップのピラーバンプが基板の電極に接触した状態では、熱圧着ツールが昇温していないため、ピラーバンプの半田は溶融していない固相状態となる。そのため、基板の電極の接合面の範囲にピラーバンプの半田の接触位置が位置合わせされていると、ピラーバンプの先端の半田が電極の接合面に当たった状態となる。この状態で、予め設定されている圧力と、予め設定されている時間だけ、チップを基板に押圧しても、押圧にともなうピラーバンプの半田の変形分のみが、チップと基板の間隙の変化となる。しかし、ピラーバンプの半田の接触位置が、電極の接触面から外れてしまい、電極の接触面の端部に片当たりしている場合は、チップを所定圧で所定時間、押圧すると、電極の接触面からの反力が十分でないため、押圧量にともなってチップが基板側に沈み込むことになる。そのため、チップと基板の間隙は、ピラーバンプの先端の半田が電極の接合面内に位置合わせされている場合に比べて、狭まることになる。
【0021】
従い、ピラーバンプが電極に接触した熱圧着ツールの昇降位置である第1の高さ測定工程の測定結果と、所定圧力で所定時間、チップを押圧した後の熱圧着ツールの昇降位置である第2の高さ測定工程の測定結果から、チップと基板の間隙の変化を求めることにより、溶融前のピラーバンプの半田と電極の位置合わせが良好に行われているか判定することができる(沈み込み量判定工程)。
【0022】
請求項3に記載の発明によれば、実装装置が、ピラーバンプを備えたチップを保持する熱圧着ツールと、基板を保持する基板ステージと、チップを保持した熱圧着ツールを基板を保持した基板ステージ側に昇降させる駆動手段と、チップを保持した熱圧着ツールの昇降位置を検出する高さ検出手段と、チップを保持した熱圧着ツールが基板を押圧する際の押圧力を検出する荷重検出手段と、熱圧着ツールの温度を昇温するヒータと、高さ検出手段で検出されたチップ高さ位置と荷重検出手段で検出した熱圧着ツールの押圧力に基づいて駆動手段を制御する制御手段を備えている。
【0023】
さらに、制御手段は、ヒータを半田溶融温度に昇温し、予め設定されている押し込み量だけ駆動手段を駆動し、基板の電極に接触しているピラーバンプを備えたチップを基板側に押し込み、荷重検出手段でピラーバンプに設けられた半田が溶融する前の電極からの反力と、半田が溶融した後の電極からの反力を測定し、ピラーバンプと電極の位置合わせの良否を判定する機能を有している。
【0024】
熱圧着ツールを半田溶融温度にヒータを昇温した後、熱圧着ツールに保持されたチップのピラーバンプの先端に設けられた半田が溶融していくまで時間経過を必要とする。その間、高さ検出手段の検出結果に基づいて精密に、チップを押し込み、押し込みにともなう電極からの反力を荷重検出手段で検出している。ピラーバンプの半田部分が電極の接合面に位置合わせされていても、部分的にはみ出している場合は、所定時間経過後の電極からの反力が、はみ出していない場合に比べて少なくなる。これらの反力の微妙な違いを荷重検出手段が正確に検出することで、ピラーバンプの位置ずれを検出することができる。
【0025】
請求項4に記載の発明によれば、制御手段が、チップのピラーバンプが基板の電極の接合面に接触した後、所定圧力で所定時間、チップを基板側に押圧する。押圧したことによるチップと基板の間隙の変化を高さ検出手段で測定し、溶融前のピラーバンプの半田と電極の位置合わせの良否を判定する機能を有している。
【0026】
熱圧着ツールを下降させることにより、熱圧着ツールに保持されたチップのピラーバンプが接触した位置を高さ検出手段で測定し、荷重検出手段でチップの押圧力を所定の値に保ちながら所定時間、押圧している。押圧が完了した際の熱圧着ツールの位置を高さ検出手段で測定することにより、チップと基板の間隙の変化を測定することができる。
【0027】
チップのピラーバンプが、電極の接合面に位置合わせされていると、半田溶融前のピラーバンプの半田は、固相状態のため押圧量に応じて変形し、変形量がチップと基板の間隙の変化となる。しかし、ピラーバンプと電極の位置合わせにおいて、ピラーバンプが電極の接合面の端に位置されていると、押圧力に応じてチップは基板側に沈み込んでしまう。このような場合、押圧完了時には、チップと基板の間隙はピラーバンプと電極が位置合わせされている場合に比べて、狭まってしまう。チップと基板の間隙の変化から位置合わせの良否を判定する制御手段を用いているので、溶融前のピラーバンプの位置ずれを良好に検出することができる。
【0028】
このように、本発明によれば、半田バンプが基板の電極に良好に熱圧着されかどうかを判定することができる。
【図面の簡単な説明】
【0029】
【図1】本発明に係る実装装置の概略側面図である。
【図2】チップと基板の関係を示す概略側面図である。
【図3】本発明に係る実装方法を説明するフローチャートである。
【図4】Z軸ヘッド高さと検出荷重を示すチャートである。
【図5】チップと基板の状態を示す側面図と、検出荷重、Z軸ヘッド高さの関係を説明する図である。
【発明を実施するための形態】
【0030】
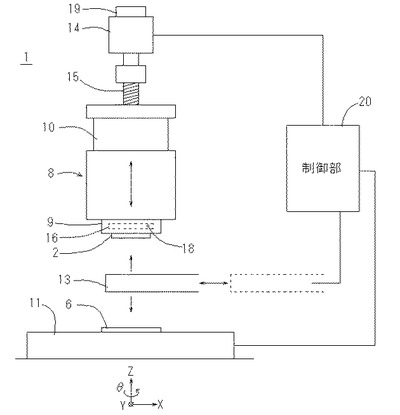
本発明の実施の形態について図面を参照して説明する。図1は本発明の実施の形態の実装装置の側面図、図2は実装装置で使用するチップ2と基板6の側面図である。図1において、実装装置1に向かって左右方向をX軸、前後方向をY軸、X軸とY軸で構成されるXY平面に直交する軸をZ軸、Z軸周りをθ軸とする。
【0031】
実装装置1は、チップ2を吸着保持するヘッド8と、基板6を吸着保持する基板ステージ11と、チップ2と基板6に設けられた位置合わせマークを認識する2視野カメラ13と、実装装置1全体を制御する制御部20とから構成されている。
【0032】
ヘッド8には、チップ2に付与されている加圧力を検出するロードセル10が内蔵されている。ヘッド8の下側にはチップ2を吸着保持するツール9が装着されている。ツール9にはヒータ16と熱電対18が内蔵されており、制御部20からの指令に基づいてチップ2を加熱できるように構成されている(図1でヒータ16は点線で表記した)。ヘッド8はサーボモータ14とサーボモータ14に連結されたボールねじ15を駆動制御することによりZ方向上下に昇降する。本発明の駆動手段は、サーボモータ14とボールねじ15で構成されている。
【0033】
また、ヘッド8は、制御部20からの指令に基づいて、押圧力を制御する荷重制御と、Z軸高さ位置を制御する位置制御との制御ができるように構成されている。本発明の熱圧着ツールは、ヘッド8とツール9で構成されている。
【0034】
ヘッド8の押圧力はモーターのトルクによって制御されるのが好ましいが、ボイスコイルモータや空圧シリンダーなど押し付け力を発生するものであれば、どのような手段であっても良い。
【0035】
荷重制御中に押圧力を一定に保つためにZ方向に上下に変動した移動量は、サーボモータ14のエンコーダー19による位置検出手段により位置情報を取得できるように構成されている。位置検出手段はZ方向に位置を測定出来るものであれば、外部にリニアスケールなどを用いても良い。
【0036】
基板ステージ11は、図示していない駆動機構によりX,Y、θ方向に移動可能で、吸着保持された基板6を所定の位置に位置決めできるように構成されている。
【0037】
2視野カメラ13は、ツール9に吸着保持されたチップ2と、基板ステージ11に吸着保持された回路基板6との間に挿入され、チップ2および基板6に付された位置合わせマークを画像認識することができる。通常は、待機位置(図1の点線表記部分)で待機しており画像認識の際に画像認識位置(チップ2と基板6の間)に移動できるようになっている。
【0038】
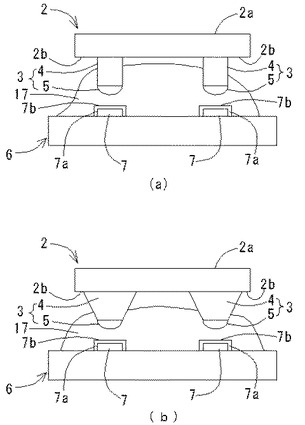
図2(a)に示すように、チップ2は、チップ裏面2bにCu製のピラー4(銅製の支柱)が設けられている。ピラー4の先端には半田5が形成されている。ピラー4と半田5でピラーバンプ3を形成している。基板6には電極7が設けられ、電極7の表面は半田メッキ7aが施されている。基板6の電極7の周囲には非導電性熱硬化樹脂である接着剤17が充填されている。電極7には、ピラーバンプ3と接合される平坦な接合面7bが設けられている。
【0039】
Cu製のピラー4の形状は、円柱状のものが用いられている。なお、ピラー4は円柱状に限らず、多角形の柱であっても、円錐状の柱であってもよく、柱の先端に半田5が形成されたものであればよい。例えば、図2(b)の様な形状であっても良い。
【0040】
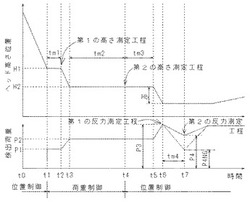
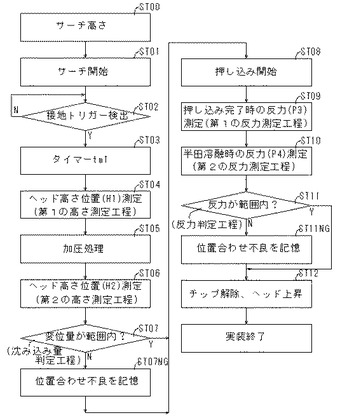
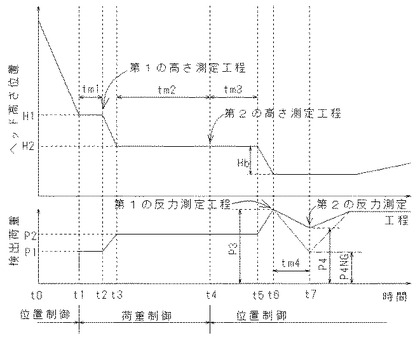
このような、実装装置1を用いてチップ2を基板6に実装する実装方法について、図3のフローチャートと、図4の実装状態を説明するグラフと、を用いて説明する。図4は、横軸に時間を表記し、縦軸にヘッド8のZ軸方向の高さおよび、ロードセル10の検出荷重を表記している。
【0041】
まず、ヘッド8のツール9にチップ2が吸着保持されており、基板ステージ11に基板6が吸着保持されている状態で、ヘッド8が基板6側に所定高さ(サーチ高さ)下降した状態から始める。予め、チップ2の位置合わせマークと基板6の位置合わせマークは2視野カメラによって画像認識され、画像認識データに基づいて、基板ステージ11がX、Y、θ方向に位置合わせされている。また、ツール9のヒータ16は予熱温度T1に暖められている。予熱温度T1では、半田が固相状態から溶融状態に移る軟化した状態となる(例えば、160℃など)。ヘッド8の駆動制御は、高さ検出手段であるエンコーダー19の検出位置に基づいてサーボモータ14が駆動され、位置制御されている(ステップST00)。
【0042】
次に、チップヘッド8を低速で所定高さだけ下降させる。電極7の周囲の接着剤17を押しのけながら、ピラーバンプ3が下降する。この状態は、図4のt0のタイミングとなる。バンプ3が電極7の近傍まで近づいた状態となる。ヘッド8が徐々に下降し、ピラーバンプ3の先端の半田5が電極7に接触するタイミングを検出するサーチ動作を行う(ステップST01)。
【0043】
次に、ロードセル10で荷重P1が検出される(ステップST02)。荷重P1をサーチ荷重とする。図4のタイミングt1がバンプ3の半田5が電極7に接触したタイミングである。ヘッド8の駆動制御をロードセル10の検出荷重に基づく荷重制御に切り換える。
【0044】
ピラーバンプ3の半田5が電極7に接触すると、予熱温度T1に暖められているツール9の温度が基板6側に伝わるようになる。
【0045】
また、基板6に予め充填されている接着剤17は、チップ2が基板6にサーチ荷重P1で押し付けられると、バンプ3と電極7の接触した部分から押し出される。この工程は、接着剤17がピラーバンプ3と電極7の間に残留していると、後の工程で製品不具合となるため行われている。
【0046】
次に、所定時間tm1だけサーチ荷重P1を維持する(ステップST03)。チップ2には、複数のピラーバンプ3が設けられている。それぞれのピラーバンプ3の高さは、微妙に違っている。そのため、所定時間tm1だけサーチ加重P1を維持することにより、全てのピラーバンプ3を電極7の接合面7bに接地させるようにしている。
【0047】
次に、ヘッド8の高さ検出手段であるエンコーダー19でヘッド8の高さ位置H1を計測し、制御部20に記憶する(ステップST04)。計測は、図4のタイミングt2で行われる。高さ位置H1の計測は、本発明の第1の高さ測定工程に対応する。
【0048】
次に、ヘッド8の設定荷重をP2に変更する(ステップST05)。予熱状態(例えば、160℃程度の状態)では、ピラーバンプ3の先端に形成された半田5は溶融しない。半田5は、固相状態から液相状態に移る段階で、軟化した状態となる。そのため、ヘッド8が設定荷重P2で荷重制御されることにより、軟化した半田5が電極7に押し込まれ、形状が変形する。
【0049】
次に、図4のタイミングt3からt4までの所定時間tm2、ヘッド8を設定荷重P2で荷重制御する。
【0050】
次に、ヘッド8の高さ検出手段であるエンコーダー19でヘッド8の高さ位置H2を計測し、制御部20に記憶する(ステップST06)。高さ位置H2の計測は、本発明の第2の高さ測定工程に対応する。
【0051】
ヘッド8の荷重制御の設定荷重P1からP2に変更したことにより、ピラーバンプ3が電極7に押し込まれる。この際、ピラーバンプ3と電極7の接合面7bが位置ずれしている場合、ステップST04とステップST06で計測されたヘッド8の高さ変位量(H1−H2)が、予め設定されている許容値Haをオーバーすることになる。そのため、設定荷重P2で所定時間tm2、荷重制御を行った後、ヘッド8の高さ変位量(H1−H2)が許容値Haの範囲内かどうか判定する(ステップST07)。判定は図4のタイミングt4で行われる。ヘッド8の高さ変位量(H1−H2)は、チップ2と基板6の間隙の変化に対応し、許容値Haの範囲内かどうかの判定は、本発明の、溶融前の半田バンプと電極の位置合わせの良否を判定する沈み込み量判定工程に対応する。許容値Haを超えるヘッド8の高さ変位量(H1−H2)が検出された場合は、制御部20に作業中基板6に半田5と電極7の位置ずれ不良があることを記憶する(ステップST07NG)。
【0052】
許容値Haは、ピラーバンプ3の半田5が電極7の接合面7bの中心付近に位置合わせされている場合を基準に設定される。半田5と接合面7bの接触位置にズレが生じ、電極7の端部に片当たりしている場合は、設定加重P2で所定時間tm2だけチップ2を押圧すると、電極7からの反力が十分でないため、押圧量にともなってチップ2が基板6側に沈み込むことになる。
【0053】
従い、許容値Haを超えるヘッド8の高さ変位量を検出することにより、ピラーバンプ3の半田5と電極7の接触面7bの位置合わせが良好に行われているか判定することができる。
【0054】
なお、設定荷重P2は、予め、半田5を予熱温度T1に加熱し軟化した状態で潰れることのない荷重を測定し制御部20に記憶させ、実際の工程で用いている。そのため、半田5が荷重P2に耐えきれずに潰れてしまうことがない。
【0055】
次に、ヘッド8の駆動制御を、ロードセル10の検出荷重に基づく荷重制御から、高さ検出手段であるエンコーダー19の検出位置に基づく位置制御に切り換える。これにより、ピラーバンプ3と電極7の間隔が一定に保たれるように位置制御が行われる。次に、ヒータ16の設定温度をT2に変更する。温度T2では、バンプ3の先端部の半田5が半田溶融温度に到達する(例えば、240〜280℃)。
【0056】
次に、所定時間tm3経過した後、さらに、ヘッド8を押し込み量Hbだけ基板6側に下降し、ピラーバンプ3を電極7に押し込む(ステップST08)。押し込みは、図4のタイミングt5で行われる。ピラーバンプ3が電極7に押し込まれることにより、反力が発生する。反力は、押し込みが完了した際(図4のタイミングt6)、ロードセル10でヘッド8の検出荷重P3として測定される(ステップST09)。検出荷重P3の測定は、本発明の第1の反力測定工程に対応する。
【0057】
次に、所定時間tm4経過した後、ロードセル10でヘッド8の検出荷重P4を測定する。検出荷重P4の測定は、ヘッド8の荷重変動が発生し安定した段階(図4のタイミングt7)で、半田5が溶融した段階に行われる(ステップST10)。検出荷重P4の測定は、本発明の第2の反力測定工程に対応する。ヘッド8は、押し込み量Hbを維持するように位置制御されているので、ピラーバンプ3が電極7に押し込まれることによって生じた反力(検出荷重P3)は、半田5の溶融にともない低下する。半田5は温度T2で加熱されているので、半田5が溶融温度に達している。また、チップ2と基板6の間に充填されている接着剤17が硬化する。
【0058】
ピラーバンプ3と電極7の位置合わせが精度良く行われている場合、溶融した半田5と電極7とで生じる反力(検出荷重P4)は、所定の値を維持する。しかし、ピラーバンプ3と電極7の位置合わせにズレが生じている場合、溶融した電極7からの反力がピラーバンプ3に作用しないため、検出荷重P4は、位置合わせが精度良く行われている場合に比べて、低くなる。この特性に基づき、検出荷重P3と検出荷重P4とから、その差(P3−P4)が、予め設定されている許容値Hbの範囲内かどうかを判定する(ステップST11)。P3−P4が許容値Hbの範囲内ならば、ピラーバンプ3と電極7の位置合わせは精度良く行われていると判定し、範囲外ならば、ピラーバンプ3と電極7の位置合わせにズレが生じていると判定する。この良否判定は、本発明の、溶融したピラーバンプ3と電極7の位置合わせの良否を判定する反力判定工程に対応する。許容値Hbを超える場合は、制御部20にピラーバンプ3と電極7の位置ずれ不良があることを記憶する(ステップST11NG)。
【0059】
次に、ヒータ16をOFFし、ツール9によるチップ2の吸着保持を解除し、ヘッド8を上昇し、チップ2の基板6への実装を終了する(ステップST12)。
【0060】
反力判定工程について、チップ2の半田5と基板6の電極7の状態を、図5を用いて詳細説明する。ステップST01からステップST10までの工程に於いて、チップ2と基板6の位置関係を図5に示す。チップ2のバンプ3が電極7に接触した状態(ステップST02)を、図5(a)に示す。この状態のチップ2の裏面2bと基板6との距離をh0とする。検出荷重はP1で、ヘッド8の高さH1が保たれている。
【0061】
チップ2のバンプ3が電極7に所定の荷重(ピラー4と電極6が接触しない荷重)で押圧された状態(ステップST06)を、図5(b)に示す。この状態のチップ2の裏面2bと基板6との距離をh1とする。検出荷重はP2で、ヘッドの高さH2が保たれている。
【0062】
チップ2のバンプ3が電極に所定の押し込み量Hbだけ押し込まれ(ステップST09)、半田5が溶融温度に到達した状態(ステップST10)を、図5(c)に示す。この状態では半田5と電極7の位置合わせが精度良く行われている。そのため、半田5と電極7とで生じる反力は、半田溶融状態であっても所定値を維持する。
【0063】
一方、半田5と電極7の位置合わせにズレが生じている場合を図5(d)に示す。溶融した半田5と電極7の位置がずれているため、電極7からの反力が半田5に伝わらない。そのため、検出荷重P4が精度良く位置合わせされた状態に比べて低くなる。
【0064】
具体的には、チップ2と基板6の生産ロット毎に、押し込み量Hbに対する、検出荷重P3およびP4の値が、制御部20に予め記憶されている。また、位置ずれが発生した場合の検出荷重P4についても設定値が制御部20に記憶されている。これらのデータに基づき、チップ2と基板6の接合毎に検出荷重P3、P4を比較し、接合の良否判断を行う。
【符号の説明】
【0065】
1 実装装置
2 チップ
2b チップ裏面
3 ピラーバンプ
4 ピラー
5 半田
6 基板
7 電極
7a 半田メッキ
7b 接合面
8 ヘッド
9 ツール
10 ロードセル
11 基板ステージ
13 2視野カメラ
14 サーボモータ
15 ボールねじ
16 ヒータ
17 接着剤
18 熱電対
19 エンコーダー
20 制御部
T1 予熱温度
T2 半田溶融温度
【技術分野】
【0001】
本発明は、フリップチップに設けられた柱状のピラーの先端に半田が形成されたピラーバンプ付きのフリップチップを基板に熱圧着する実装方法および実装装置に関するものである。
【背景技術】
【0002】
近年、高密度実装の要求から半田バンプも電極間隔を狭め、バンプの構造も丸みをおびたボールバンプから、柱状の形状のものが用いられるようになっている。特許文献1には、バンプピッチを超微細にした柱状のピラーバンプが、開示されている。ピラーバンプは、狭ピッチで立設したCu等のピラー(円柱状)の先端に半球状の半田を形成している。先端の半田は、半球状の場合もあるし、先端部を楕円状に平坦化させたものもある。そのため、バンプピッチを従来の半田ボールタイプの半田バンプに比べて微細にすることができる。また高密度実装に対応することができる。これらの半田部分は、ピラー(円柱)の底面の面積が微小面積であるため、従来の半田ボールタイプの半田バンプに比べて、極めて少ない量の半田で半田接合部分が形成されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−245288号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このようなピラーバンプが形成されたチップを、基板に熱圧着し接合状態を検査しようとすると次のような問題がある。
【0005】
チップと基板の位置合わせは、チップおよび基板に設けられた位置合わせマークを画像認識し、画像認識データに基づいて、チップを保持する熱圧着ツールもしくは基板を保持する基板ステージを駆動して位置合わせしている。そのため、位置合わせマークに基づいてチップと基板が位置合わせされていても、ピラーバンプと基板の電極のセンター位置が所定範囲を超えていると、チップを押圧する際に、ピラーバンプが電極からズレおちる問題がある(特に、バンプピッチが微細化されたピラーバンプでは、位置合わせのマージンが狭く、ピラーバンプと電極の位置合わせが困難な状況となっている)。ピラーバンプが電極からズレおちた状態のチップと基板の接合は、回路のショートなど、不具合を招く要因となる。
【0006】
また、ピラーバンプの先端に設けられている半田の量が、従来のボールバンプに比べて少ないため、ヒータによる半田の加熱と、チップの押圧力のバランスによっては、ピラーと電極の間で溶融した半田が押し潰されて、電極の接合面からはみ出してしまう問題もある。
【0007】
そこで、本発明の課題は、ピラーバンプなどの微細な半田バンプが形成されたチップを基板に熱圧着する実装方法において、ピラーバンプが基板の電極に良好に熱圧着されかどうかを判定することができる実装方法および実装装置を提供することとする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、請求項1に記載の発明は、
チップに設けられたピラーバンプを、基板に設けられた電極に、押圧しながら加熱し熱圧着する実装方法であつて、
チップを熱圧着ツールで保持して基板側に下降させる工程と、
チップのピラーバンプが基板の電極に接触した後、
チップを保持する熱圧着ツールの温度を半田溶融温度に昇温する工程と、
予め設定されている押し込み量だけ、チップを基板側に押し込み、押し込みが完了した際の、基板の電極からの反力を測定する第1の反力測定工程と、
ピラーバンプに設けられた半田溶融した際の基板の電極からの反力を測定する第2の反力測定工程と、
前記第1の反力測定工程の測定結果と、前記第2の反力測定工程の測定結果から、溶融したピラーバンプと電極の位置合わせの良否を判定する反力判定工程と、を有する実装方法である。
【0009】
請求項2に記載の発明は、請求項1の発明において、
チップのピラーバンプが基板の電極に接触した後、
チップを保持している熱圧着ツールの昇降位置を測定する第1の高さ測定工程と、
予め設定されている圧力で、予め設定されている時間、チップを基板側に押圧した後、
チップを保持している熱圧着ツールの昇降位置を測定する第2の高さ測定工程と、
前記第1の高さ測定工程の測定結果と、前記第2の高さ測定工程の測定結果から、チップを押圧したことによるチップと基板の間隔の変化を求め、半田溶融前のピラーバンプと電極の位置合わせの良否を判定する沈み込み量判定工程を有する実装方法である。
【0010】
請求項3に記載の発明は、
ピラーバンプが設けられたチップを保持する熱圧着ツールと、
チップのピラーバンプが接合される電極を有した基板を保持する基板ステージと、
チップを保持した熱圧着ツールを、基板を保持した基板ステージ側に、昇降させる駆動手段と、
チップを保持した熱圧着ツールの昇降位置を検出する高さ検出手段と、
チップを保持した熱圧着ツールが基板を押圧する際の、押圧力を検出する荷重検出手段と、
熱圧着ツールの温度を昇温するヒータと、
前記高さ検出手段でチップ高さ位置情報を測定し、前記荷重検出手段でチップへの押圧力を測定し、前記駆動手段と前記ヒータとを制御する制御手段とを備えた実装装置であって、
前記制御手段が、
前記ヒータを半田溶融温度に昇温し、前記駆動手段を駆動し熱圧着ツールを基板側に予め設定されている押し込み量だけ押し込んだ際の、前記荷重検出手段で測定した検出荷重と、ピラーバンプに設けられた半田が溶融した際の検出荷重から、溶融したピラーバンプと電極の位置合わせの良否を判定する機能を有する実装装置である。
【0011】
請求項4に記載の発明は、請求項3の発明において、
前記制御手段が、
チップのピラーバンプが基板の電極に接触した後、
予め設定されている圧力で、予め設定されている時間、チップを基板側に押圧し、押圧したことによるチップと基板の間隔に変化から、溶融前のピラーバンプと電極の位置合わせの良否を判定する機能を有する実装装置である。
【発明の効果】
【0012】
請求項1に記載の発明によれば、ピラーバンプを備えたチップを熱圧着ツールで保持して基板側に下降している。そして、チップのピラーバンプが基板の電極に接触した後、チップを保持する熱圧着ツールの温度を半田溶融温度に昇温している。そして、熱圧着ツールの温度がピラーバンプに伝わる間に、チップを基板側に、予め設定されている押し込み量だけ押し込んでいる。そして、チップの押し込みが完了した際の、基板の電極からの反力を、熱圧着ツールに設けられた荷重検出手段で測定し、制御手段に第1の反力測定結果として記憶している(第1の反力測定工程)。一方、熱圧着ツールの温度がピラーバンプに伝わることによりピラーバンプに設けられた半田の溶融が進んでいく。そのため、予め設定された押し込み量の状態で、熱圧着ツールが昇降位置を保持していても、ピラーバンプの半田が溶融すると、基板の電極からの反力は少しずつ低下していく。
【0013】
そのため、請求項1の発明では、ピラーバンプに設けられた半田が溶融するまでの、予め設定されている時間(ピラーバンプの半田の溶融が完了する時間)経過した後、基板の電極からの反力を測定し、制御手段に第2の反力測定結果として記憶している(第2の反力測定工程)。そして、制御手段に記憶した第1の反力測定結果と、第2の反力測定結果とから溶融したピラーバンプと電極の位置合わせの良否を判定している(反力判定工程)。
【0014】
ピラーバンプと電極の位置ずれが発生していると、溶融したピラーバンプの半田が基板の電極の接合面からはみだした状態となる。溶融した半田全体を、電極の接合面で支える場合に比べて、電極からはみでている分、電極からの反力は低下する。
【0015】
より具体的には、第1の反力測定工程では、ピラーバンプの半田は完全に溶融していないため、電極の接触面(ピラーバンプが当接する面)にピラーバンプが位置合わせされていれば、電極の接触面から多少はみ出ていても、所定の押し込み量だけチップを押し込んでも、所定の範囲の反力を電極から受けることができる。しかし、ピラーバンプの半田が溶融した状態では、電極の接触面の全てで、ピラーバンプの半田が電極の接合面全体で支えている場合と、ピラーバンプの半田の一部が電極からはみ出ている場合では反力の違いが生じる。第2の反力測定工程は、ピラーバンプの半田が溶融した状態となるため、電極の接合面から半田がはみ出ている場合は、チップを押し込むことによる電極からの反力が、電極の接触面の全てで支えている場合に比べて低下して検出される。
【0016】
これらの反力の測定結果(第1の反力測定工程の測定結果と、第2の反力測定工程の測定結果)から、チップのピラーバンプと、基板の電極が良好に位置合わせされ、熱圧着されたかを判定することができる(反力判定工程)。
【0017】
請求項2に記載の発明によれば、請求項1に記載の発明において、さらに、ピラーバンプを備えたチップを熱圧着ツールで保持して基板側に下降し、チップのピラーバンプが基板の電極に接触した後、チップを保持している熱圧着ツールの昇降位置を測定している(第1の高さ測定工程)。
【0018】
そして、予め設定されている圧力で、予め設定されている時間だけ、チップを基板側に押圧した後、チップを保持している熱圧着ツールの昇降位置を測定している(第2の高さ測定工程)。
【0019】
そして、第1の高さ測定工程の測定結果と、第2の高さ測定工程の測定結果から、押圧したことによるチップと基板の間隙の変化を求め、半田溶融前のピラーバンプと電極の位置合わせを判定している(沈み込み量判定工程)。
【0020】
チップのピラーバンプが基板の電極に接触した状態では、熱圧着ツールが昇温していないため、ピラーバンプの半田は溶融していない固相状態となる。そのため、基板の電極の接合面の範囲にピラーバンプの半田の接触位置が位置合わせされていると、ピラーバンプの先端の半田が電極の接合面に当たった状態となる。この状態で、予め設定されている圧力と、予め設定されている時間だけ、チップを基板に押圧しても、押圧にともなうピラーバンプの半田の変形分のみが、チップと基板の間隙の変化となる。しかし、ピラーバンプの半田の接触位置が、電極の接触面から外れてしまい、電極の接触面の端部に片当たりしている場合は、チップを所定圧で所定時間、押圧すると、電極の接触面からの反力が十分でないため、押圧量にともなってチップが基板側に沈み込むことになる。そのため、チップと基板の間隙は、ピラーバンプの先端の半田が電極の接合面内に位置合わせされている場合に比べて、狭まることになる。
【0021】
従い、ピラーバンプが電極に接触した熱圧着ツールの昇降位置である第1の高さ測定工程の測定結果と、所定圧力で所定時間、チップを押圧した後の熱圧着ツールの昇降位置である第2の高さ測定工程の測定結果から、チップと基板の間隙の変化を求めることにより、溶融前のピラーバンプの半田と電極の位置合わせが良好に行われているか判定することができる(沈み込み量判定工程)。
【0022】
請求項3に記載の発明によれば、実装装置が、ピラーバンプを備えたチップを保持する熱圧着ツールと、基板を保持する基板ステージと、チップを保持した熱圧着ツールを基板を保持した基板ステージ側に昇降させる駆動手段と、チップを保持した熱圧着ツールの昇降位置を検出する高さ検出手段と、チップを保持した熱圧着ツールが基板を押圧する際の押圧力を検出する荷重検出手段と、熱圧着ツールの温度を昇温するヒータと、高さ検出手段で検出されたチップ高さ位置と荷重検出手段で検出した熱圧着ツールの押圧力に基づいて駆動手段を制御する制御手段を備えている。
【0023】
さらに、制御手段は、ヒータを半田溶融温度に昇温し、予め設定されている押し込み量だけ駆動手段を駆動し、基板の電極に接触しているピラーバンプを備えたチップを基板側に押し込み、荷重検出手段でピラーバンプに設けられた半田が溶融する前の電極からの反力と、半田が溶融した後の電極からの反力を測定し、ピラーバンプと電極の位置合わせの良否を判定する機能を有している。
【0024】
熱圧着ツールを半田溶融温度にヒータを昇温した後、熱圧着ツールに保持されたチップのピラーバンプの先端に設けられた半田が溶融していくまで時間経過を必要とする。その間、高さ検出手段の検出結果に基づいて精密に、チップを押し込み、押し込みにともなう電極からの反力を荷重検出手段で検出している。ピラーバンプの半田部分が電極の接合面に位置合わせされていても、部分的にはみ出している場合は、所定時間経過後の電極からの反力が、はみ出していない場合に比べて少なくなる。これらの反力の微妙な違いを荷重検出手段が正確に検出することで、ピラーバンプの位置ずれを検出することができる。
【0025】
請求項4に記載の発明によれば、制御手段が、チップのピラーバンプが基板の電極の接合面に接触した後、所定圧力で所定時間、チップを基板側に押圧する。押圧したことによるチップと基板の間隙の変化を高さ検出手段で測定し、溶融前のピラーバンプの半田と電極の位置合わせの良否を判定する機能を有している。
【0026】
熱圧着ツールを下降させることにより、熱圧着ツールに保持されたチップのピラーバンプが接触した位置を高さ検出手段で測定し、荷重検出手段でチップの押圧力を所定の値に保ちながら所定時間、押圧している。押圧が完了した際の熱圧着ツールの位置を高さ検出手段で測定することにより、チップと基板の間隙の変化を測定することができる。
【0027】
チップのピラーバンプが、電極の接合面に位置合わせされていると、半田溶融前のピラーバンプの半田は、固相状態のため押圧量に応じて変形し、変形量がチップと基板の間隙の変化となる。しかし、ピラーバンプと電極の位置合わせにおいて、ピラーバンプが電極の接合面の端に位置されていると、押圧力に応じてチップは基板側に沈み込んでしまう。このような場合、押圧完了時には、チップと基板の間隙はピラーバンプと電極が位置合わせされている場合に比べて、狭まってしまう。チップと基板の間隙の変化から位置合わせの良否を判定する制御手段を用いているので、溶融前のピラーバンプの位置ずれを良好に検出することができる。
【0028】
このように、本発明によれば、半田バンプが基板の電極に良好に熱圧着されかどうかを判定することができる。
【図面の簡単な説明】
【0029】
【図1】本発明に係る実装装置の概略側面図である。
【図2】チップと基板の関係を示す概略側面図である。
【図3】本発明に係る実装方法を説明するフローチャートである。
【図4】Z軸ヘッド高さと検出荷重を示すチャートである。
【図5】チップと基板の状態を示す側面図と、検出荷重、Z軸ヘッド高さの関係を説明する図である。
【発明を実施するための形態】
【0030】
本発明の実施の形態について図面を参照して説明する。図1は本発明の実施の形態の実装装置の側面図、図2は実装装置で使用するチップ2と基板6の側面図である。図1において、実装装置1に向かって左右方向をX軸、前後方向をY軸、X軸とY軸で構成されるXY平面に直交する軸をZ軸、Z軸周りをθ軸とする。
【0031】
実装装置1は、チップ2を吸着保持するヘッド8と、基板6を吸着保持する基板ステージ11と、チップ2と基板6に設けられた位置合わせマークを認識する2視野カメラ13と、実装装置1全体を制御する制御部20とから構成されている。
【0032】
ヘッド8には、チップ2に付与されている加圧力を検出するロードセル10が内蔵されている。ヘッド8の下側にはチップ2を吸着保持するツール9が装着されている。ツール9にはヒータ16と熱電対18が内蔵されており、制御部20からの指令に基づいてチップ2を加熱できるように構成されている(図1でヒータ16は点線で表記した)。ヘッド8はサーボモータ14とサーボモータ14に連結されたボールねじ15を駆動制御することによりZ方向上下に昇降する。本発明の駆動手段は、サーボモータ14とボールねじ15で構成されている。
【0033】
また、ヘッド8は、制御部20からの指令に基づいて、押圧力を制御する荷重制御と、Z軸高さ位置を制御する位置制御との制御ができるように構成されている。本発明の熱圧着ツールは、ヘッド8とツール9で構成されている。
【0034】
ヘッド8の押圧力はモーターのトルクによって制御されるのが好ましいが、ボイスコイルモータや空圧シリンダーなど押し付け力を発生するものであれば、どのような手段であっても良い。
【0035】
荷重制御中に押圧力を一定に保つためにZ方向に上下に変動した移動量は、サーボモータ14のエンコーダー19による位置検出手段により位置情報を取得できるように構成されている。位置検出手段はZ方向に位置を測定出来るものであれば、外部にリニアスケールなどを用いても良い。
【0036】
基板ステージ11は、図示していない駆動機構によりX,Y、θ方向に移動可能で、吸着保持された基板6を所定の位置に位置決めできるように構成されている。
【0037】
2視野カメラ13は、ツール9に吸着保持されたチップ2と、基板ステージ11に吸着保持された回路基板6との間に挿入され、チップ2および基板6に付された位置合わせマークを画像認識することができる。通常は、待機位置(図1の点線表記部分)で待機しており画像認識の際に画像認識位置(チップ2と基板6の間)に移動できるようになっている。
【0038】
図2(a)に示すように、チップ2は、チップ裏面2bにCu製のピラー4(銅製の支柱)が設けられている。ピラー4の先端には半田5が形成されている。ピラー4と半田5でピラーバンプ3を形成している。基板6には電極7が設けられ、電極7の表面は半田メッキ7aが施されている。基板6の電極7の周囲には非導電性熱硬化樹脂である接着剤17が充填されている。電極7には、ピラーバンプ3と接合される平坦な接合面7bが設けられている。
【0039】
Cu製のピラー4の形状は、円柱状のものが用いられている。なお、ピラー4は円柱状に限らず、多角形の柱であっても、円錐状の柱であってもよく、柱の先端に半田5が形成されたものであればよい。例えば、図2(b)の様な形状であっても良い。
【0040】
このような、実装装置1を用いてチップ2を基板6に実装する実装方法について、図3のフローチャートと、図4の実装状態を説明するグラフと、を用いて説明する。図4は、横軸に時間を表記し、縦軸にヘッド8のZ軸方向の高さおよび、ロードセル10の検出荷重を表記している。
【0041】
まず、ヘッド8のツール9にチップ2が吸着保持されており、基板ステージ11に基板6が吸着保持されている状態で、ヘッド8が基板6側に所定高さ(サーチ高さ)下降した状態から始める。予め、チップ2の位置合わせマークと基板6の位置合わせマークは2視野カメラによって画像認識され、画像認識データに基づいて、基板ステージ11がX、Y、θ方向に位置合わせされている。また、ツール9のヒータ16は予熱温度T1に暖められている。予熱温度T1では、半田が固相状態から溶融状態に移る軟化した状態となる(例えば、160℃など)。ヘッド8の駆動制御は、高さ検出手段であるエンコーダー19の検出位置に基づいてサーボモータ14が駆動され、位置制御されている(ステップST00)。
【0042】
次に、チップヘッド8を低速で所定高さだけ下降させる。電極7の周囲の接着剤17を押しのけながら、ピラーバンプ3が下降する。この状態は、図4のt0のタイミングとなる。バンプ3が電極7の近傍まで近づいた状態となる。ヘッド8が徐々に下降し、ピラーバンプ3の先端の半田5が電極7に接触するタイミングを検出するサーチ動作を行う(ステップST01)。
【0043】
次に、ロードセル10で荷重P1が検出される(ステップST02)。荷重P1をサーチ荷重とする。図4のタイミングt1がバンプ3の半田5が電極7に接触したタイミングである。ヘッド8の駆動制御をロードセル10の検出荷重に基づく荷重制御に切り換える。
【0044】
ピラーバンプ3の半田5が電極7に接触すると、予熱温度T1に暖められているツール9の温度が基板6側に伝わるようになる。
【0045】
また、基板6に予め充填されている接着剤17は、チップ2が基板6にサーチ荷重P1で押し付けられると、バンプ3と電極7の接触した部分から押し出される。この工程は、接着剤17がピラーバンプ3と電極7の間に残留していると、後の工程で製品不具合となるため行われている。
【0046】
次に、所定時間tm1だけサーチ荷重P1を維持する(ステップST03)。チップ2には、複数のピラーバンプ3が設けられている。それぞれのピラーバンプ3の高さは、微妙に違っている。そのため、所定時間tm1だけサーチ加重P1を維持することにより、全てのピラーバンプ3を電極7の接合面7bに接地させるようにしている。
【0047】
次に、ヘッド8の高さ検出手段であるエンコーダー19でヘッド8の高さ位置H1を計測し、制御部20に記憶する(ステップST04)。計測は、図4のタイミングt2で行われる。高さ位置H1の計測は、本発明の第1の高さ測定工程に対応する。
【0048】
次に、ヘッド8の設定荷重をP2に変更する(ステップST05)。予熱状態(例えば、160℃程度の状態)では、ピラーバンプ3の先端に形成された半田5は溶融しない。半田5は、固相状態から液相状態に移る段階で、軟化した状態となる。そのため、ヘッド8が設定荷重P2で荷重制御されることにより、軟化した半田5が電極7に押し込まれ、形状が変形する。
【0049】
次に、図4のタイミングt3からt4までの所定時間tm2、ヘッド8を設定荷重P2で荷重制御する。
【0050】
次に、ヘッド8の高さ検出手段であるエンコーダー19でヘッド8の高さ位置H2を計測し、制御部20に記憶する(ステップST06)。高さ位置H2の計測は、本発明の第2の高さ測定工程に対応する。
【0051】
ヘッド8の荷重制御の設定荷重P1からP2に変更したことにより、ピラーバンプ3が電極7に押し込まれる。この際、ピラーバンプ3と電極7の接合面7bが位置ずれしている場合、ステップST04とステップST06で計測されたヘッド8の高さ変位量(H1−H2)が、予め設定されている許容値Haをオーバーすることになる。そのため、設定荷重P2で所定時間tm2、荷重制御を行った後、ヘッド8の高さ変位量(H1−H2)が許容値Haの範囲内かどうか判定する(ステップST07)。判定は図4のタイミングt4で行われる。ヘッド8の高さ変位量(H1−H2)は、チップ2と基板6の間隙の変化に対応し、許容値Haの範囲内かどうかの判定は、本発明の、溶融前の半田バンプと電極の位置合わせの良否を判定する沈み込み量判定工程に対応する。許容値Haを超えるヘッド8の高さ変位量(H1−H2)が検出された場合は、制御部20に作業中基板6に半田5と電極7の位置ずれ不良があることを記憶する(ステップST07NG)。
【0052】
許容値Haは、ピラーバンプ3の半田5が電極7の接合面7bの中心付近に位置合わせされている場合を基準に設定される。半田5と接合面7bの接触位置にズレが生じ、電極7の端部に片当たりしている場合は、設定加重P2で所定時間tm2だけチップ2を押圧すると、電極7からの反力が十分でないため、押圧量にともなってチップ2が基板6側に沈み込むことになる。
【0053】
従い、許容値Haを超えるヘッド8の高さ変位量を検出することにより、ピラーバンプ3の半田5と電極7の接触面7bの位置合わせが良好に行われているか判定することができる。
【0054】
なお、設定荷重P2は、予め、半田5を予熱温度T1に加熱し軟化した状態で潰れることのない荷重を測定し制御部20に記憶させ、実際の工程で用いている。そのため、半田5が荷重P2に耐えきれずに潰れてしまうことがない。
【0055】
次に、ヘッド8の駆動制御を、ロードセル10の検出荷重に基づく荷重制御から、高さ検出手段であるエンコーダー19の検出位置に基づく位置制御に切り換える。これにより、ピラーバンプ3と電極7の間隔が一定に保たれるように位置制御が行われる。次に、ヒータ16の設定温度をT2に変更する。温度T2では、バンプ3の先端部の半田5が半田溶融温度に到達する(例えば、240〜280℃)。
【0056】
次に、所定時間tm3経過した後、さらに、ヘッド8を押し込み量Hbだけ基板6側に下降し、ピラーバンプ3を電極7に押し込む(ステップST08)。押し込みは、図4のタイミングt5で行われる。ピラーバンプ3が電極7に押し込まれることにより、反力が発生する。反力は、押し込みが完了した際(図4のタイミングt6)、ロードセル10でヘッド8の検出荷重P3として測定される(ステップST09)。検出荷重P3の測定は、本発明の第1の反力測定工程に対応する。
【0057】
次に、所定時間tm4経過した後、ロードセル10でヘッド8の検出荷重P4を測定する。検出荷重P4の測定は、ヘッド8の荷重変動が発生し安定した段階(図4のタイミングt7)で、半田5が溶融した段階に行われる(ステップST10)。検出荷重P4の測定は、本発明の第2の反力測定工程に対応する。ヘッド8は、押し込み量Hbを維持するように位置制御されているので、ピラーバンプ3が電極7に押し込まれることによって生じた反力(検出荷重P3)は、半田5の溶融にともない低下する。半田5は温度T2で加熱されているので、半田5が溶融温度に達している。また、チップ2と基板6の間に充填されている接着剤17が硬化する。
【0058】
ピラーバンプ3と電極7の位置合わせが精度良く行われている場合、溶融した半田5と電極7とで生じる反力(検出荷重P4)は、所定の値を維持する。しかし、ピラーバンプ3と電極7の位置合わせにズレが生じている場合、溶融した電極7からの反力がピラーバンプ3に作用しないため、検出荷重P4は、位置合わせが精度良く行われている場合に比べて、低くなる。この特性に基づき、検出荷重P3と検出荷重P4とから、その差(P3−P4)が、予め設定されている許容値Hbの範囲内かどうかを判定する(ステップST11)。P3−P4が許容値Hbの範囲内ならば、ピラーバンプ3と電極7の位置合わせは精度良く行われていると判定し、範囲外ならば、ピラーバンプ3と電極7の位置合わせにズレが生じていると判定する。この良否判定は、本発明の、溶融したピラーバンプ3と電極7の位置合わせの良否を判定する反力判定工程に対応する。許容値Hbを超える場合は、制御部20にピラーバンプ3と電極7の位置ずれ不良があることを記憶する(ステップST11NG)。
【0059】
次に、ヒータ16をOFFし、ツール9によるチップ2の吸着保持を解除し、ヘッド8を上昇し、チップ2の基板6への実装を終了する(ステップST12)。
【0060】
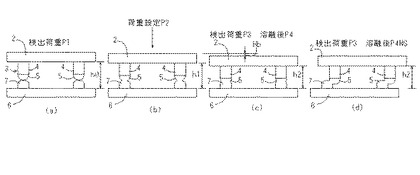
反力判定工程について、チップ2の半田5と基板6の電極7の状態を、図5を用いて詳細説明する。ステップST01からステップST10までの工程に於いて、チップ2と基板6の位置関係を図5に示す。チップ2のバンプ3が電極7に接触した状態(ステップST02)を、図5(a)に示す。この状態のチップ2の裏面2bと基板6との距離をh0とする。検出荷重はP1で、ヘッド8の高さH1が保たれている。
【0061】
チップ2のバンプ3が電極7に所定の荷重(ピラー4と電極6が接触しない荷重)で押圧された状態(ステップST06)を、図5(b)に示す。この状態のチップ2の裏面2bと基板6との距離をh1とする。検出荷重はP2で、ヘッドの高さH2が保たれている。
【0062】
チップ2のバンプ3が電極に所定の押し込み量Hbだけ押し込まれ(ステップST09)、半田5が溶融温度に到達した状態(ステップST10)を、図5(c)に示す。この状態では半田5と電極7の位置合わせが精度良く行われている。そのため、半田5と電極7とで生じる反力は、半田溶融状態であっても所定値を維持する。
【0063】
一方、半田5と電極7の位置合わせにズレが生じている場合を図5(d)に示す。溶融した半田5と電極7の位置がずれているため、電極7からの反力が半田5に伝わらない。そのため、検出荷重P4が精度良く位置合わせされた状態に比べて低くなる。
【0064】
具体的には、チップ2と基板6の生産ロット毎に、押し込み量Hbに対する、検出荷重P3およびP4の値が、制御部20に予め記憶されている。また、位置ずれが発生した場合の検出荷重P4についても設定値が制御部20に記憶されている。これらのデータに基づき、チップ2と基板6の接合毎に検出荷重P3、P4を比較し、接合の良否判断を行う。
【符号の説明】
【0065】
1 実装装置
2 チップ
2b チップ裏面
3 ピラーバンプ
4 ピラー
5 半田
6 基板
7 電極
7a 半田メッキ
7b 接合面
8 ヘッド
9 ツール
10 ロードセル
11 基板ステージ
13 2視野カメラ
14 サーボモータ
15 ボールねじ
16 ヒータ
17 接着剤
18 熱電対
19 エンコーダー
20 制御部
T1 予熱温度
T2 半田溶融温度
【特許請求の範囲】
【請求項1】
チップに設けられたピラーバンプを、基板に設けられた電極に、押圧しながら加熱し熱圧着する実装方法であつて、
チップを熱圧着ツールで保持して基板側に下降させる工程と、
チップのピラーバンプが基板の電極に接触した後、
チップを保持する熱圧着ツールの温度を半田溶融温度に昇温する工程と、
予め設定されている押し込み量だけ、チップを基板側に押し込み、押し込みが完了した際の、基板の電極からの反力を測定する第1の反力測定工程と、
ピラーバンプに設けられた半田溶融した際の基板の電極からの反力を測定する第2の反力測定工程と、
前記第1の反力測定工程の測定結果と、前記第2の反力測定工程の測定結果から、溶融したピラーバンプと電極の位置合わせの良否を判定する反力判定工程と、を有する実装方法。
【請求項2】
請求項1の発明において、
チップのピラーバンプが基板の電極に接触した後、
チップを保持している熱圧着ツールの昇降位置を測定する第1の高さ測定工程と、
予め設定されている圧力で、予め設定されている時間、チップを基板側に押圧した後、
チップを保持している熱圧着ツールの昇降位置を測定する第2の高さ測定工程と、
前記第1の高さ測定工程の測定結果と、前記第2の高さ測定工程の測定結果から、チップを押圧したことによるチップと基板の間隔の変化を求め、半田溶融前のピラーバンプと電極の位置合わせの良否を判定する沈み込み量判定工程を有する実装方法。
【請求項3】
ピラーバンプが設けられたチップを保持する熱圧着ツールと、
チップのピラーバンプが接合される電極を有した基板を保持する基板ステージと、
チップを保持した熱圧着ツールを、基板を保持した基板ステージ側に、昇降させる駆動手段と、
チップを保持した熱圧着ツールの昇降位置を検出する高さ検出手段と、
チップを保持した熱圧着ツールが基板を押圧する際の、押圧力を検出する荷重検出手段と、
熱圧着ツールの温度を昇温するヒータと、
前記高さ検出手段でチップ高さ位置情報を測定し、前記荷重検出手段でチップへの押圧力を測定し、前記駆動手段と前記ヒータとを制御する制御手段とを備えた実装装置であって、
前記制御手段が、
前記ヒータを半田溶融温度に昇温し、前記駆動手段を駆動し熱圧着ツールを基板側に予め設定されている押し込み量だけ押し込んだ際の、前記荷重検出手段で測定した検出荷重と、ピラーバンプに設けられた半田が溶融した際の検出荷重から、溶融したピラーバンプと電極の位置合わせの良否を判定する機能を有する実装装置。
【請求項4】
請求項3の発明において、
前記制御手段が、
チップのピラーバンプが基板の電極に接触した後、
予め設定されている圧力で、予め設定されている時間、チップを基板側に押圧し、押圧したことによるチップと基板の間隔に変化から、溶融前のピラーバンプと電極の位置合わせの良否を判定する機能を有する実装装置。
【請求項1】
チップに設けられたピラーバンプを、基板に設けられた電極に、押圧しながら加熱し熱圧着する実装方法であつて、
チップを熱圧着ツールで保持して基板側に下降させる工程と、
チップのピラーバンプが基板の電極に接触した後、
チップを保持する熱圧着ツールの温度を半田溶融温度に昇温する工程と、
予め設定されている押し込み量だけ、チップを基板側に押し込み、押し込みが完了した際の、基板の電極からの反力を測定する第1の反力測定工程と、
ピラーバンプに設けられた半田溶融した際の基板の電極からの反力を測定する第2の反力測定工程と、
前記第1の反力測定工程の測定結果と、前記第2の反力測定工程の測定結果から、溶融したピラーバンプと電極の位置合わせの良否を判定する反力判定工程と、を有する実装方法。
【請求項2】
請求項1の発明において、
チップのピラーバンプが基板の電極に接触した後、
チップを保持している熱圧着ツールの昇降位置を測定する第1の高さ測定工程と、
予め設定されている圧力で、予め設定されている時間、チップを基板側に押圧した後、
チップを保持している熱圧着ツールの昇降位置を測定する第2の高さ測定工程と、
前記第1の高さ測定工程の測定結果と、前記第2の高さ測定工程の測定結果から、チップを押圧したことによるチップと基板の間隔の変化を求め、半田溶融前のピラーバンプと電極の位置合わせの良否を判定する沈み込み量判定工程を有する実装方法。
【請求項3】
ピラーバンプが設けられたチップを保持する熱圧着ツールと、
チップのピラーバンプが接合される電極を有した基板を保持する基板ステージと、
チップを保持した熱圧着ツールを、基板を保持した基板ステージ側に、昇降させる駆動手段と、
チップを保持した熱圧着ツールの昇降位置を検出する高さ検出手段と、
チップを保持した熱圧着ツールが基板を押圧する際の、押圧力を検出する荷重検出手段と、
熱圧着ツールの温度を昇温するヒータと、
前記高さ検出手段でチップ高さ位置情報を測定し、前記荷重検出手段でチップへの押圧力を測定し、前記駆動手段と前記ヒータとを制御する制御手段とを備えた実装装置であって、
前記制御手段が、
前記ヒータを半田溶融温度に昇温し、前記駆動手段を駆動し熱圧着ツールを基板側に予め設定されている押し込み量だけ押し込んだ際の、前記荷重検出手段で測定した検出荷重と、ピラーバンプに設けられた半田が溶融した際の検出荷重から、溶融したピラーバンプと電極の位置合わせの良否を判定する機能を有する実装装置。
【請求項4】
請求項3の発明において、
前記制御手段が、
チップのピラーバンプが基板の電極に接触した後、
予め設定されている圧力で、予め設定されている時間、チップを基板側に押圧し、押圧したことによるチップと基板の間隔に変化から、溶融前のピラーバンプと電極の位置合わせの良否を判定する機能を有する実装装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−169495(P2012−169495A)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2011−30158(P2011−30158)
【出願日】平成23年2月15日(2011.2.15)
【出願人】(000219314)東レエンジニアリング株式会社 (505)
【Fターム(参考)】
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成23年2月15日(2011.2.15)
【出願人】(000219314)東レエンジニアリング株式会社 (505)
【Fターム(参考)】
[ Back to top ]