
実質的に即時のフィードバックを提供するための歯ブラシ
【課題】フィードバックを提供するための歯ブラシを提供する。
【解決手段】歯ブラシ10は、ハンドル20と、ネック30と、ネック30から延び、かつその基部から延びる洗浄要素を含むブラシヘッド40領域と、ブラッシングと同時に、歯ブラシ10の少なくとも1つの方向に沿った歯ブラシ10の動作を示すデータを獲得するための動作センサと、ブラッシングと同時に、歯ブラシ10の動作を示すデータを分析するためのマイクロプロセッサと、ブラッシングと同時に、歯ブラシ10のユーザにフィードバックを提供する手段と、を含み、動作センサ、マイクロプロセッサ及びフィードバック手段26が協働して、ユーザが歯をブラッシングしている間にブラッシング動作を調整できるように、実質的に即時のフィードバックをユーザに提供する。実質的に即時のフィードバックを歯ブラシ10のユーザに提供する方法も提供する。
【解決手段】歯ブラシ10は、ハンドル20と、ネック30と、ネック30から延び、かつその基部から延びる洗浄要素を含むブラシヘッド40領域と、ブラッシングと同時に、歯ブラシ10の少なくとも1つの方向に沿った歯ブラシ10の動作を示すデータを獲得するための動作センサと、ブラッシングと同時に、歯ブラシ10の動作を示すデータを分析するためのマイクロプロセッサと、ブラッシングと同時に、歯ブラシ10のユーザにフィードバックを提供する手段と、を含み、動作センサ、マイクロプロセッサ及びフィードバック手段26が協働して、ユーザが歯をブラッシングしている間にブラッシング動作を調整できるように、実質的に即時のフィードバックをユーザに提供する。実質的に即時のフィードバックを歯ブラシ10のユーザに提供する方法も提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歯ブラシ装置が、ユーザのブラッシングが強力過ぎる場合、実質的に即時のフィードバックを提供して歯ブラシ装置のユーザに警告するよう適合されている、手動又は電動歯ブラシ装置に関する。
【背景技術】
【0002】
歯肉上に穏やかであるとともに歯の表面から歯垢を除去するための歯ブラシの使用の有効性は、ブラッシング中のユーザのブラッシング動作、ブラッシング持続時間、及びユーザによって付与される力により影響される。歯科専門家はこれらのパラメーターを統合して、「推奨されるブラッシング技術」を作製し、この技術は、歯科診療中に歯科患者に教授される。
【0003】
ある場合に、ユーザのブラッシング動作は加速度計技術を用いて測定され、ブラッシングが完了した後にデータがユーザに間接的に提供される。そのような場合の1つにおいて、手動歯ブラシにより収集されたデータは、ブラッシングセッション中のユーザのブラッシング技術の正確な評価を、ユーザ及び/又はユーザの歯科医に提供するのに使用され得る。歯ブラシは、ブラッシング中のユーザのブラッシング動作、力及び持続時間に関するデータの時間系列を獲得し、データを収納した後、第2の装置を使用してデータを分析する。歯ブラシと第2の装置との間のユーザインターフェースは、歯ブラシのユーザ及び/又はユーザの歯科医が、ブラッシングセッションのシミュレーションを見ることを可能にする。多数のブラッシングセッションのデータを収納することもできるため、患者のブラッシング技術及び管理の履歴を集め、検討することができる。しかしながら、手動ブラシは、ブラッシングセッション中に、直接的かつ瞬間的なフィードバックをユーザに提供しない。
【0004】
加えて、電動歯ブラシで歯をブラッシングするのに使用される技術は、手動ブラシにおける技術とは異なり得る。電動歯ブラシの場合、技術は歯ブラシのヘッドを穏やかに歯の上で滑らせて、電力駆動の剛毛による洗浄を可能にする必要がある。
【発明の概要】
【発明が解決しようとする課題】
【0005】
ブラッシングセッション中に、ブラッシングのパターンを監視し、ユーザのブラッシングが強力過ぎる場合、直接的かつ実質的に瞬間的なフィードバックをユーザ提供して警告し、それにより、ブラッシングセッション中に、ユーザがユーザのブラッシング技術をより安全かつ有効なものに調整することができる、手動又は電動歯ブラシが必要とされている。
【課題を解決するための手段】
【0006】
本発明は歯ブラシに関し、歯ブラシは、ハンドルと、ネックと、ネックから延びるブラシヘッド領域を含み、ブラシヘッド領域の基部から延びる洗浄要素を含むブラシヘッド領域と、ブラッシングと同時に、歯ブラシの少なくとも1つの方向に沿った歯ブラシの動作を示すデータを獲得するための動作センサと、ブラッシングと同時に、歯ブラシの動作を示すデータを分析するためのマイクロプロセッサと、ブラッシングと同時に、ブラッシング技術の強力さのレベルに関するフィードバックを歯ブラシのユーザに提供する手段と、を含む。動作センサ、マイクロプロセッサ及びフィードバック手段は、本明細書に記載するように協働して、ユーザが歯をブラッシングしている間にブラッシング動作を調整できるように、実質的に即時のフィードバックをユーザに提供する。本発明はまた、そのような歯ブラシの使用方法にも関する。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態による歯ブラシの平面図。
【図2】図1の2−2面に沿った、図1の歯ブラシの断面図。
【図3】本発明の電動歯ブラシの使用方法の第1の実施形態の表示。
【図4】本発明の電動歯ブラシの使用方法の第2の実施形態の表示。
【図5】本発明の電動歯ブラシの使用方法の第3の実施形態の表示。
【図6a】歯ブラシが強力な様式で使用されていることを示す、本発明の電動による歯ブラシの一実施形態のx−動作のグラフ。
【図6b】歯ブラシが強力な様式で使用されていない場合の、図6aに示した実施形態のx−動作のグラフ。
【発明を実施するための形態】
【0008】
本明細書に記載の本発明による1つの方法は、手動又は電動歯ブラシの、歯ブラシの長手方向及び/又は緯度方向に沿った動作を示すデータを、ブラッシングと同時に獲得することと、ブラッシングと同時にデータを分析することと、ユーザのブラッシングが強力過ぎる場合、ブラッシングと同時にユーザにフィードバックを提供して、ブラッシングの間にユーザがブラッシング動作を調整し得るようユーザに警告することと、を含む方法を提供する。本明細書で使用される「実質的に即時のフィードバック」とは、ブラッシング中に歯ブラシから獲得された、動作を示すデータをブラッシングと同時に分析して、ユーザのブラッシングが強力過ぎるかどうかを判定し、ユーザのブラッシングが強力過ぎる場合、ブラッシングと同時にユーザにフィードバックを提供して、歯のブラッシングの間にユーザがブラッシング動作を調整し得るようユーザに警告する手段である。獲得されたデータは、ユーザが歯のブラッシングを完了した後、分析のために歯ブラシの別個の構成要素内に収納されない。
【0009】
「手動歯ブラシ」というフレーズは、その動作が歯ブラシのユーザにより生じる動作に依存する、剛毛等の洗浄要素を有する歯ブラシを意味する。「電動歯ブラシ」というフレーズは、洗浄要素の振動又は回転動作等の動作が、電力により生じる動作に依存する、剛毛等の洗浄要素を有する歯ブラシを意味する。電動歯ブラシは、電動アシスト歯ブラシとも称される。「強力なブラッシング」というフレーズは、ユーザが口腔内にて、ブラシを高い振動数及び/又は振幅で移動することを意味する。高い振動数及び高い振幅の定義は、後に論じられる。強力なブラッシングは、歯の基部における歯肉の侵食をもたらし得る。
【0010】
本方法は、例えばブラシのx、y、又はz軸等の、少なくとも1つの方向に沿った歯ブラシの動作を示すデータを獲得することを含む。いくつかの実施形態では、2つの方向又は軸に沿った歯ブラシの動作を示すデータが獲得され得る。別の実施形態では、3つの方向又は軸に沿った歯ブラシの動作を示すデータが獲得され得る。
【0011】
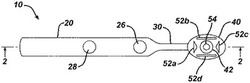
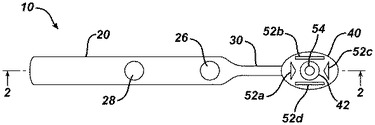
ブラッシング技術を監視し、ユーザのブラッシングが強力過ぎる場合、実質的に即時のフィードバックをユーザに提供してユーザに警告するのに使用される歯ブラシの一実施形態を、図1及び2に示す。図1は歯ブラシ10の平面図であり、図2は図1の2−2面に沿った歯ブラシ10の断面図である。歯ブラシ10は、ハンドル20と、ネック30と、ブラシヘッド40とを含む。
【0012】
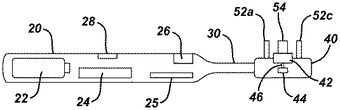
ハンドル20内には電源22、例えば電池、マイクロプロセッサ24、動作センサ25、ユーザのブラッシングが強力過ぎる場合、ユーザにフィードバックを提供してユーザに警告するための手段26、及び電源スイッチ28が搭載されている。図示していないが、電源22はマイクロプロセッサ24、動作センサ25、フィードバック手段26、及び電源スイッチ28に接続されている。動作センサ25、マイクロプロセッサ24及びフィードバック手段26は、一緒に協働して、ユーザのブラッシングが強力過ぎるか否かに関する実質的に即時のフィードバックを歯ブラシのユーザに提供する。歯ブラシの操作中にデータが獲得及び分析される様式は、以下に更に詳細に論じられる。
【0013】
動作センサ25は、例えば、加速度計、ジャイロスコープ、又はこれらの組み合わせであることができる。いくつかの実施形態において、動作センサ25は、図1及び2に示す歯ブラシのx方向、即ち長手方向における加速を、時間の関数として測定するのに使用される単軸加速度計である。別の実施形態では、動作センサ25は二軸加速度計であり、図1及び2に示す歯ブラシのx方向(長手方向)及びy方向(緯度方向)における加速を、時間の関数として測定するのに使用される。これは、歯ブラシのヘッドの平面での歯ブラシの移動である。なお別の実施形態では、動作センサ25は三軸加速度計であり、図1及び2に示す歯ブラシのx方向、y方向、及びz方向における加速を、時間の関数として測定するのに使用される。これは、歯ブラシのヘッドの3次元移動である。例えば電池により実質的に一定の電流が加速度計に供給される際、加速度計の抵抗が動作に応答して変化し、式V=IRに従った電圧出力の変化をもたらす。好適な加速度計は、Vernier Software(Portland、OR)、Analog Devices(Norwood、MA)又はSTMicroelectronics(Carrollton、Texas)等の多数の供給元から入手可能である。
【0014】
マイクロプロセッサ24は、約10〜約200サンプル/秒、場合により約50〜約120サンプル/秒のデータ獲得率(サンプリング率)で、加速度計から加速データを受容する。マイクロプロセッサ24は、Texas Instruments(Dallas、TX)、Atmel Corporation(San Jose、CA)、Microchip Technology(Chandler、AZ)、Intel Corporation(Santa Clara、CA)及びSTMicroelectronics(Carrollton、Texas)から購入できるもの等の市販のチップの形態であってもよい。
【0015】
フィードバック手段26は、ユーザに送られる信号を提供して、ユーザのブラッシングが強力過ぎることをユーザに通知する。信号は、多数の形態であってよい。これらの信号は視覚、音、触覚、匂い、若しくは味覚の5つの感覚、又はこれらの組み合わせのいずれかの形態であってよい。一実施形態において、フィードバック手段26は、ハンドル20上の又はハンドル20の表面の中に埋め込まれた発光体又は一連の発光体であってよい。発光体はユーザのブラッシングが強力過ぎない間はオフであり、ユーザのブラッシングが強力過ぎる場合に発光してよい。
【0016】
別の実施形態では、2色の光が使用されることができる。ここでは、第1の色の発光は、ユーザのブラッシングが強力過ぎないことをユーザに通知する。ユーザが強力過ぎるブラッシングを開始した場合、第1の色の発光が薄暗くなり、第2の色の発光が明るくなる。
【0017】
一実施形態において、フィードバック手段26により提供される信号は、上記に論じたものと類似した様式で使用される音、又は一連の音の形態であってよい。音量、音の高低、音色、又は周波数の変化は、全て可能な信号である。なお別の実施形態では、ユーザのブラッシングが強力過ぎる場合、フィードバック手段26は信号として振動動作を提供してユーザに警告してよい。
【0018】
前述したように、本発明の歯ブラシは、ハンドル、ネック及びブラシヘッドを含む。ブラシヘッドは、通常は房状に配列された剛毛の形態の洗浄要素を有するであろう。洗浄房は歯の表面の洗浄を最適にする様式で、ブラシヘッドの面に配置された、およそ20〜50個の個々の剛毛から形成されている。図1は、ブラシヘッド40の房52、54の1つの配置を示す。静止房52、又は可動房54のいずれか形態であってよいブラシヘッド40上の房52、54の配置は、本発明の範囲内に限定されないことを理解すべきである。典型的な房は、直径がおよそ0.063インチ(1.6mm)であり、およそ0.079インチ2(2mm2)の断面積を有する。一般的に使用される毛の直径は、柔らかめの毛で0.006インチ(0.15mm)、中程度の毛で0.008インチ(0.2mm)、及び固めの毛で0.010インチ(0.25mm)である。
【0019】
図1及び2の実施形態に示すように、ブラシヘッド40は、房52状に配置された静止剛毛の形態の洗浄要素を含む。本実施形態は、静止房52a、52b、52c及び52dを、それぞれブラシヘッド40の先端、末端及び側部に示す。この実施形態では、ブラシヘッド40は、房54状に配置された可動剛毛も含む。可動房54は、キャリヤ42、即ち剛毛プレート又は剛毛取付けプレート上に配置されてよく、キャリヤ42は、例えばシャフト46によって房動作を生じる手段44に接続されている。房動作を生じる手段44は、並進、回転、又は振動動作を生じる装置を含むが、これらに限定されない。
【0020】
図1及び2の実施形態に示す房52及び房54は、上述しかつ図面に示した実施形態ではブラシハンドルに実質的に直交しているが、他の剛毛配置及びブラシ設計を使用してよい。例えば、剛毛は、ブラシハンドルのヘッド領域に関連して角度付けされてよい。
【0021】
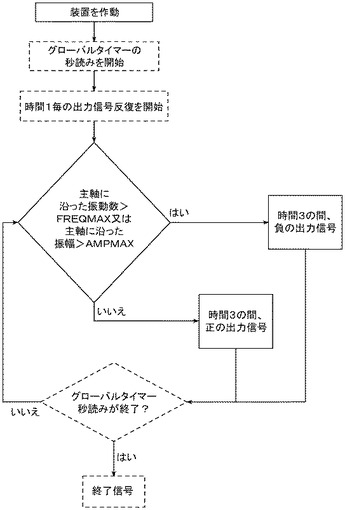
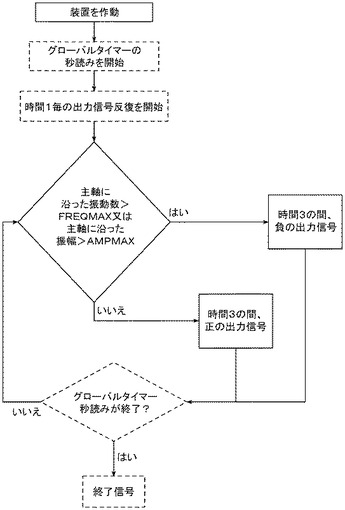
ユーザのブラッシングが強力過ぎる場合、実質的に即時のフィードバックをユーザに提供してユーザに警告する、本発明の歯ブラシ10を使用する多数の異なる方法、又はモードが存在する。図3は、歯ブラシ10の使用の第1の実施形態の方法を図示する。この実施形態では、ユーザは、好ましくは標準的な洗浄動作を用いて、歯ブラシ10を移動する。ユーザは、ユーザのブラッシングが強力過ぎない場合、歯ブラシ10から正の出力信号を受容してよい。ユーザは、ユーザのブラッシングが強力過ぎる場合、歯ブラシ10から負の出力信号を受容するであろう。用語「正」及び「負」は、本明細書で、使用されているブラッシング技術が、それぞれ許容可能であり又は許容可能ではないことを示し、この用語に関連した任意の他の技術的意味は有さない。特定の実施形態では、正及び/又は負の出力信号のそれぞれは、ブラッシング期間を通じて継続してよい。別の実施形態では、正及び/又は負の出力信号のそれぞれは、ブラッシング期間の過程にわたって断続的であってよい。
【0022】
第1の工程では、歯ブラシ10が作動される。次に、任意の内部秒読みグローバルタイマーが、歯の所定のブラッシング時間にセットされる。歯の所定のブラッシング時間は、例えば、180、150、120、90、75、60、45、又は30秒であってよく、現在の口腔衛生の実践に基づいて、製造業者又はユーザにより設定されることができる。この任意の工程で、内部秒読みグローバルタイマーが開始される。
【0023】
次の工程に進行し、任意の出力信号が使用されて、歯ブラシが起動されたことをユーザに通知してよい。信号は、視覚(光)、音、触覚(振動)、匂い、又は味覚の5感のいずれかに対する多数の形態であってよい。次いで、別個のタイマーを開始させてよく、時間1の間隔において、任意の出力信号が送られ、ユーザが、例えば、次の四半分円に移動する必要があることをユーザに通知し、又はユーザがブラッシングセッションの終わりに装置を停止することを忘れた場合、装置が起動されていることを示してもよい。時間1は、例えば、30、20、15、10、又は5秒であることができる。
【0024】
次の工程に進行して、動作センサ25は、主軸、例えばx軸に沿ったブラシの変位を測定する。マイクロプロセッサ24は、動作センサ25からの歯ブラシの動作に関するデータの時間系列の受容を開始する。次いで、マイクロプロセッサは、主軸、例えばx軸に沿った動作の振動数、即ち計算された振動数、及び主軸、例えばx軸に沿った動作の振幅、即ち計算された振幅の値を計算する。データは、1、0.5、0.25、0.125、0.1、0.05、0.025、0.0125、0.01、0.005秒、又はそれ未満等の時間間隔において連続的に獲得されてよい。獲得されるデータに関する時間間隔は、規則的であってよく、又は無作為に選択されてもよい。
【0025】
得られたデータの流れをマイクロプロセッサ内のローパスデジタルフィルタに通過させてデータ中の高振動数ノイズを除去して、ユーザの動作をより明確にし、頂点、即ち極大値、及び谷、即ち極小値の検出を、より明確にすることができる。フィルタリングが達成された後、頂点及び谷の検出は、多様な方法で;例えば、勾配における変化を計算し、勾配がいつ正から負(例えば頂点)に、又は負から正(例えば谷)に、変化するかを監視することにより達成することができる。頂点及び谷が決定された後、頂点間の時間が既知となり、振動数が計算され、また頂点と続く谷との間の差が計算されて、振幅が測定される。更なるフィルタリングは、強力な状態が特定の時間、例えば、0.4秒満たされる必要条件を加えることによって達成されてよい。このことは、ブラッシングの間に、瞬間的な素早い動作を経験した場合に、ユーザが強力なブラッシング技術を告知されないことを確実にするであろう。
【0026】
プログラムの次の工程において、マイクロプロセッサ24内のオペレーティングプログラムは、第1の決定ブロックに到達する。このブロックでは、主軸に沿った動作の計算された振動数の値がFREQMAXの所定の値と比較され、主軸に沿った動作の計算された振幅の値が、AMPMAXの所定の値と比較される。これらの比較は、連続的に又は同時に行われてよい。連続的に行われる場合、比較の順序は、歯ブラシ10の性能にとって重要ではない。
【0027】
軸に沿った動作の計算された振動数の値がFREQMAXの値よりも大きい場合、又は主軸に沿った動作の計算された振幅の値がAMPMAXの値よりも大きい場合、即ち図3で第1の決定ブロックにおいて「はい」の応答の場合、マイクロプロセッサ24内のオペレーティングプログラムはフィードバック手段を介してユーザに送られる負の出力信号を生成して、ユーザのブラッシングが強力過ぎることをユーザに通知する。
【0028】
FREQMAX及びAMPMAXの値は、多数の方法を決定し得る。例えば、最大値は、販売前に予め決定され、歯ブラシ内にプログラミングされてよく、又は最大値は、ユーザの特定のブラッシング癖に基づいて決定されてもよい。FREQMAXは、1秒当たり約2回、又は3回、又はそれ以上のx方向、即ち長手方向におけるブラシの往復動作として決定されてよい。AMPMAXは、約7メートル/秒2、又はそれ以上のブラシの加速であってよい。
【0029】
下記の実施例2に論じるように、これらの値は、歯肉及び歯の損傷に繋がり得る観察されたブラッシング癖を、加速出力の振動数/周期及び振幅と相関付けることにより決定されてよい。下記の実施例2では、ブラシのx方向における、1秒当たり約4回又はそれ以上の往復動作の振動数(FREQMAX)と、約9メートル/秒2を越えるブラシの加速の振幅(AMPMAX)は、強力なブラッシングと特徴付けられた。
【0030】
FREQMAX又はAMPMAXを決定するのに使用され得る他の方法は、スライドスケール又はウエイトスケールである。スライドスケールでは、FREQMAX又はAMPMAXは、主軸に沿った動作の振動数、又は主軸に沿った動作の振幅の値に基づいてよい。第1の実施形態では、主軸に沿った動作の振幅の値が計算される。FREQMAXの値は、主軸に沿った、計算された動作の振幅の値に基づいて決定される。例えば、計算されたブラシの加速の振幅が3.0メートル/秒2の場合、FREQMAXは2に設定されてよい。一方、計算されたブラシの加速の振幅が2.0メートル/秒2の場合、FREQMAXはより大きい値、4に設定されてよい。
【0031】
第2の実施形態では、主軸に沿った動作の振動数の値が計算される。AMPMAXの値は、主軸に沿った動作の計算された振動数の値に基づいて決定される。例えば、ブラシの計算された振動数が2の場合、AMPMAXは10メートル/秒2に設定されてよい。一方、ブラシの計算された振動数が4の場合、AMPMAXはより小さい値、5メートル/秒2に設定されてよい。
【0032】
いくつかの実施形態では、振幅及び振動数は、ブラッシング技術の全体的な強力さに異なる影響を与える場合がある。それらの実施形態では、振動数及び/又は振幅に乗数を加えるウエイトスケールを使用して、特定の動作を強調してよい。
【0033】
主軸に沿った動作の計算された振動数の値がFREQMAXの値以下の場合、又は主軸に沿った動作の計算された振幅の値が、AMPMAXの値以下の場合、即ち図3で第1の決定ブロックにおいて「いいえ」の応答の場合、ユーザは、時間3の期間、ユーザのブラッシングが強力過ぎないことをユーザに通知する正の出力信号を受容するであろう。
【0034】
前述したように、フィードバック(正の出力信号又は負の出力信号のいずれかとしての)は、例えば視覚、音、触覚、匂い、若しくは味覚の5感(又は感覚の組み合わせ)のいずれかに対する信号又は信号の組み合わせの形態であってよい。信号は、ユーザが、ユーザのブラッシングが強力過ぎるか否かをユーザが判定するのに十分な期間(時間3)継続するであろう。いくつかの実施形態において、時間3は、3、2、1、0.5、又は0.25秒等の値であってよいが、これらに限定されない。別の実施形態では、フィードバックは継続的であってよく、ユーザのブラッシングがもはや強力過ぎない場合にのみ停止する。なお別の実施形態では、フィードバックは断続的であってよく、ブラッシング技術により決定されて、正と負とが交替してもよい。
【0035】
正の出力信号又は負の出力信号が終了した後、マイクロプロセッサ24内のオペレーティングプログラムは、図3に示す、任意の第2の決定ブロックに前進する。このブロックでは、内部秒読みグローバルタイマーの値が試験される。内部秒読みグローバルタイマーの値が0の場合、マイクロプロセッサ24内のオペレーティングプログラムがユーザに送られる終了信号を生成して、洗浄プロセスが完了したことをユーザに通知する。内部秒読みグローバルタイマーの値が0より大きい場合、マイクロプロセッサ24内のオペレーティングプログラムが再び第1の決定ブロックに前進し、洗浄プロセスが継続する。任意の第2の決定ブロックを有さない実施形態では、マイクロプロセッサ24内のオペレーティングプログラムが再び第1の決定ブロックに前進し、洗浄プロセスが継続する。
【0036】
図4は、歯ブラシ10の使用の第2の実施形態の方法を図示する。この実施形態では、ユーザは標準的な洗浄動作を用いて、歯ブラシ10を移動する。ユーザは、ユーザのブラッシングが強力過ぎない場合、正の出力信号を受容するであろう。ユーザは、ユーザのブラッシングが強力過ぎる場合、負の出力信号を受容するであろう。この実施形態では、動作は主軸に沿って検出されている。
【0037】
第1の工程では、歯ブラシ10が作動される。次に、任意の内部秒読みグローバルタイマーが、歯の所定のブラッシング時間にセットされる。歯の所定のブラッシング時間は、例えば、180、150、120、90、75、60、45、又は30秒であってよく、現在の口腔衛生の実践に基づいて、製造元又はユーザにより設定されてもよい。この工程では、内部秒読みグローバルタイマーが開始される。
【0038】
次の工程に進行し、出力信号が使用されて、歯ブラシが起動されたことをユーザに通知してよい。信号は、例えば視覚(光)、音、触覚(振動)、匂い、又は味覚の5感のいずれかに対する多数の形態であってよい。次いで、別個のタイマーを開始させてよく、時間1の間隔において、任意の出力信号が送られて、ユーザが、例えば、次の四半分円に移動する必要があることをユーザに通知し、又はユーザがブラッシングセッションの終わりに装置を停止することを忘れた場合、装置が起動されていることを示してもよい。時間1は、例えば、30、20、15、10、又は5秒であってよい。
【0039】
次の工程に進行して、動作センサ25は、主軸、例えばx軸に沿ったブラシの変位を測定する。マイクロプロセッサ24は、動作センサ25からの歯ブラシの動作に関するデータの時間系列の受容を開始する。次いで、マイクロプロセッサは、主軸、例えばx軸に沿った動作の振動数、即ち計算された振動数、及び主軸、例えばx軸に沿った動作の振幅、即ち計算された振幅の値を計算する。データは、1、0.5、0.25、0.125、0.1、0.05 0.025、0.0125、0.01、又は0.005、又はそれ未満の等の間隔において連続的に獲得されてよい。獲得されるデータ点に関する時間間隔は、規則的であってよく、又は無作為に選択されてもよい。
【0040】
上述したように、得られたデータの流れを、マイクロプロセッサ内の一連のフィルターを通過させて、データ中のノイズを除去してよい。
【0041】
プログラムの次の工程において、マイクロプロセッサ24内のオペレーティングプログラムは、第1の決定ブロックに到達する。このブロックでは、主軸に沿った動作の計算された振動数の値がFREQMAXの所定の値と比較され、主軸に沿った動作の計算された振幅の値が、AMPMAXの所定の値と比較される。これらの比較は、連続的に又は同時に行われてもよい。連続的に行われる場合、比較の順序は、歯ブラシ10の性能にとって重要ではない。
【0042】
軸に沿った動作の計算された振動数の値がFREQMAXの値よりも大きく、かつ主軸に沿った動作の計算された振幅の値がAMPMAXの値よりも大きい場合、即ち図4で第1の決定ブロックに対する「はい」の応答の場合、マイクロプロセッサ24内のオペレーティングプログラムは、フィードバック手段を介してユーザに送られる負の出力信号を生成して、ユーザのブラッシングが強力過ぎることをユーザに通知する。
【0043】
軸に沿った動作の計算された振動数の値がFREQMAXの値以下の場合、又は主軸に沿った動作の計算された振幅の値が、AMPMAXの値以下の場合、即ち図4で第1の決定ブロックに対する「いいえ」の応答の場合、ユーザは、時間3の期間、ユーザのブラッシングが強力過ぎないことをユーザに通知する正の出力信号を受容するであろう。
【0044】
前述したように、フィードバックは5感、例えば視覚、音、触覚、匂い、若しくは味、又は感覚の組み合わせのいずれかに対する1つ、又は多数の信号の形態であってよい。信号はユーザが、ユーザのブラッシングが強力過ぎるか否かをユーザが判定するのに十分な期間(時間3)継続するであろう。いくつかの実施形態において、時間3は、3、2、1、0.5、又は0.25秒等の値であってよいが、これらに限定されない。別の実施形態では、フィードバックは、継続的であってよく、ユーザのブラッシングがもはや強力過ぎない場合にのみ停止する。なお別の実施形態では、フィードバックは、断続的であってよく、ブラッシング技術により決定されて、正と負とが交替してもよい。
【0045】
正の出力信号又は負の出力信号が終了した後、マイクロプロセッサ24内のオペレーティングプログラムは、図4に示す、任意の第2の決定ブロックに前進する。このブロックでは、内部秒読みグローバルタイマーの値が試験される。内部秒読みグローバルタイマーの値が0の場合、マイクロプロセッサ24内のオペレーティングプログラムがユーザに送られる終了信号を有し、洗浄プロセスが完了したことをユーザに通知する。内部秒読みグローバルタイマーの値が0より大きい場合、マイクロプロセッサ24内のオペレーティングプログラムが再び第1の決定ブロックに前進し、洗浄プロセスが継続する。任意の第2の決定ブロックを有さない実施形態では、マイクロプロセッサ24内のオペレーティングプログラムが再び第1の決定ブロックに前進し、洗浄プロセスが継続する。
【0046】
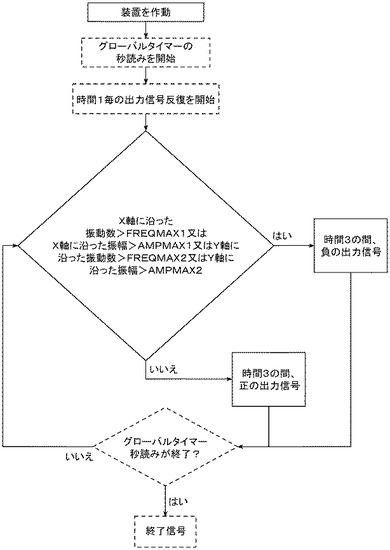
図5は、歯ブラシ10の使用の第3の実施形態の方法を図示する。この実施形態では、ユーザは標準的な洗浄動作を用いて、歯ブラシ10を移動する。ユーザは、ユーザのブラッシングが強力過ぎない場合、歯ブラシ10から正の出力信号を受容するであろう。ユーザは、ユーザのブラッシングが強力過ぎる場合、負の出力信号を受容するであろう。この実施形態では、動作は2つの軸、x軸、及びy軸に沿って検出される。
【0047】
第1の工程では、歯ブラシ10が作動される。次に、任意の内部秒読みグローバルタイマーが、歯の所定のブラッシング時間にセットされる。歯の所定のブラッシング時間は、例えば、180、150、120、90、75、60、45、又は30秒であってよく、現在の口腔衛生の実践に基づいて、製造元又はユーザにより設定されてもよい。この工程では、内部秒読みグローバルタイマーが開始される。
【0048】
次の工程に進行し、任意の出力信号が使用されて、歯ブラシが起動されたことをユーザに通知する。信号は、5感、即ち視覚(光)、音、触覚(振動)、匂い、又は味覚ののいずれかに対する多数の形態であってよい。次いで、別個のタイマーを開始させてよく、時間1の間隔において、任意の出力信号が送られて、ユーザが、例えば、次の四半分円に移動する必要があることをユーザに通知し、又はユーザがブラッシングセッションの終わりに装置を停止することを忘れた場合、装置が起動されていることを示してもよい。時間1は、例えば、30、20、15、10、又は5秒であってよい。
【0049】
次の工程に進行して、動作センサ25は、主軸、例えばx軸に沿ったブラシの変位を測定する。マイクロプロセッサ24は、動作センサ25からの歯ブラシの動作に関するデータの時間系列の受容を開始する。次いで、マイクロプロセッサは、主軸、例えばx軸に沿った動作の振動数、即ち計算された振動数、及び主軸、例えばx軸に沿った動作の振幅、即ち計算された振幅の値を計算する。データは、1、0.5、0.25、0.125、0.1、0.05 0.025、0.0125、0.01、又は0.005秒、又はそれ未満等の間隔において取得されてよい。獲得されるデータ点に関する時間間隔は、規則的であってよく、又は無作為に選択されてもよい。
【0050】
上述したように、収集されたデータの流れを、マイクロプロセッサ内の一連のフィルターを通過させて、データ中のノイズを除去してよい。
【0051】
プログラムの次の工程において、マイクロプロセッサ24内のオペレーティングプログラムは、第1の決定ブロックに到達する。このブロックでは、主軸に沿った動作の計算された振動数の値がFREQMAX1の所定の値と比較され、主軸に沿った動作の計算された振幅の値が、AMPMAX1の所定の値と比較され、y軸に沿った動作の計算された振動数の値がFREQMAX2の所定の値と比較され、y軸に沿った動作の計算された振幅の値が、AMPMAX2の所定の値と比較される。
【0052】
x軸に沿った動作の計算された振動数の値がFREQMAX1の値よりも大きい場合、又はx軸に沿った動作の計算された振幅の値がAMPMAX1の値よりも大きい場合、又はy軸に沿った動作の計算された振動数の値がFREQMAX2の値よりも大きい場合、又はy軸に沿った動作の計算された振幅の値がAMPMAX2の値よりも大きい場合、即ち図5で第1の決定ブロックに対して「はい」の応答の場合、マイクロプロセッサ24内のオペレーティングプログラムは、フィードバック手段を介してユーザに負の出力信号を送って、ユーザのブラッシングが強力過ぎることをユーザに通知する。
【0053】
x軸に沿った動作の計算された振動数の値がFREQMAX1の値未満であり、かつx軸に沿った動作の計算された振幅の値がAMPMAX1の値未満であり、かつy軸に沿った動作の計算された振動数の値がFREQMAX2の値未満であり、かつy軸に沿った動作の計算された振幅の値がAMPMAX2未満であり、即ち図5で第1の決定ブロックに対して「いいえ」の応答の場合、マイクロプロセッサ24内のオペレーティングプログラムは、フィードバック手段を介してユーザに正の出力信号を送って、ユーザのブラッシングが強力過ぎないことをユーザに通知する。前述したように、フィードバックは、5感、即ち視覚、音、触覚、匂い、若しくは味、又は感覚の組み合わせのいずれかに対する信号又は信号の組み合わせの形態であってよい。信号は、ユーザが、ユーザのブラッシングが強力過ぎることをユーザが判定するのに十分な期間(時間3)継続するであろう。いくつかの実施形態において、時間3は、3、2、1、0.5、又は0.25秒等の値であってよいが、これらに限定されない。別の実施形態では、フィードバックは、継続的であってよく、ユーザのブラッシングがもはや強力過ぎない場合にのみ停止する。なお別の実施形態では、フィードバックは、断続的であってもよい。
【0054】
図5に示した実施形態において、負の出力信号は、FREQMAX1、AMPMAX1、FREQMAX2及びAMPMAX2の値の任意の1つのみの値が超過した場合、ユーザに送られて、ユーザのブラッシングが強力過ぎることを通知することに留意されたい。別の実施形態では、負の出力信号は、FREQMAX1、AMPMAX1、FREQMAX2、AMPMAX2の値の全部の値が超過した場合、ユーザに送られて、ユーザのブラッシングが強力過ぎることを通知する。更なる別の実施形態では、負の出力信号は、FREQMAX1、AMPMAX1、FREQMAX2、AMPMAX2の値のうちの2つ又は3つが超過した場合、ユーザに送られる。
【0055】
正の出力信号又は負の出力信号が終了した後、マイクロプロセッサ24内のオペレーティングプログラムは、図5に示す、任意の第2の決定ブロックに前進する。このブロックでは、内部秒読みグローバルタイマーの値が試験される。内部秒読みグローバルタイマーの値が0の場合、マイクロプロセッサ24内のオペレーティングプログラムがユーザに送られる終了信号を有し、洗浄プロセスが完了したことをユーザに通知する。内部秒読みグローバルタイマーの値が0より大きい場合、マイクロプロセッサ24内のオペレーティングプログラムが再び第1の決定ブロックに前進し、洗浄プロセスが継続する。任意の第2の決定ブロックを有さない実施形態では、マイクロプロセッサ24内のオペレーティングプログラムが再び第1の決定ブロックに前進し、洗浄プロセスが継続する。
【0056】
別の実施形態では、手動又は電動歯ブラシは交換可能なブラシ部分を含む。ここでは、センサがヘッド領域内に存在せず、ヘッドは取り外し可能かつ交換可能であってよい。ヘッドは、剛毛の摩滅が生じた後、ブラシを継続して使用できるように、例えばハンドルとねじ係合することによって接続されてよい。任意の所望のタイプの取り外し可能なヘッド又は剛毛カートリッジを使用することができる。
【実施例】
【0057】
以下の実施例は、単に実例のためのものであり、本発明を限定するものとして解釈すべきでは決してない。当業者は、添付の請求項の精神と範囲内において種々の変形が可能であることを十分理解するであろう。
【0058】
(実施例1)
x軸、即ち長手方向軸を含む電動歯ブラシと、歯ブラシに取り付けられた加速度計とを準備した。試験を行い、26人の対象が、対象の歯を歯ブラシでブラッシングしているところが観察された。それぞれの対象は、専門家から認可された歯科医により観察され、歯肉及び歯の損傷に繋がり得るブラッシング癖を特徴付け及び同定した。観察は、マジックミラーの後ろで行われ、対象のブラッシング技術と歯科医のブラッシング観察との間の任意の干渉を防いだ。ブラッシング中、歯科医によりストロークの速度と長さとを1〜9の等級で特徴付け、1が穏やか、9が強力であった。歯科医はまた、穏やかから強力のブラッシング挙動を1(穏やか)〜9(強力)の等級に特徴付けた。次いで、強力又は損傷特性(歯科医のランク付けが6を越える)を示したブラッシング癖を、加速度計からの加速出力の振動数/周期及び振幅と相関付けた。加速度計からの加速の振幅及び振動数出力を使用して、ブラッシング中の実際のストローク長さ、速度、サイクル間の時間、及びブラシの位置を同定した。
【0059】
この実施例では、強力なブラッシングを判定するのに使用された方法は、振動数及び振幅の両方に対する標準的な制限要件であった。26人の対象の試験に基づいて、ブラシのx方向における、1秒当たり4回を越える往復動作の振動数(FREQMAX)と、約9メートル/秒2を越えるブラシの加速の振幅(AMPMAX)は、強力なブラッシングと特徴付けられた。
【0060】
(実施例2)
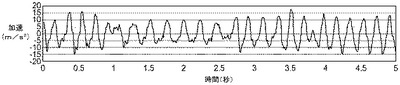
電動歯ブラシx軸、即ち長手方向軸と、歯ブラシに取り付けられた加速度計とを準備した。実施例1のデータに基づいてFREQMAX及びAMPMAXを決定した。ブラシを作動させた後、強力なブラッシングをシミュレートするよう移動した。図6aは、電動による歯ブラシが強力な様式で、即ち大きく、速いストロークで使用されている際の歯ブラシのx方向、即ち長手方向における動作のグラフである。
【0061】
次いで、電動歯ブラシを、穏やかなブラッシングをシミュレートするよう使用した。図6bは、電動による歯ブラシが強力な様式ではなく、即ち小さく、遅いストロークで使用されている際の歯ブラシのx方向、即ち長手方向における動作のグラフである。グラフは、強力なブラッシングと強力でないブラッシングとの間の相違を示す。得られたデータはアルゴリズムに入力されて、強力なブラッシングが検出された場合、ブラッシングの間にブラッシング技術を調整できるように、ユーザのブラッシング技術に関するフィードバックをユーザに提供し得る。
【0062】
〔実施の態様〕
(1) 歯ブラシであって、
ハンドルと、
ネックと、
前記ネックから延びるブラシヘッド領域であって、前記ブラシヘッド領域の基部から延びる洗浄要素を含む、ブラシヘッド領域と、
ブラッシングと同時に、前記歯ブラシの少なくとも1つの方向に沿った前記歯ブラシの動作を示すデータを獲得するための動作センサと、
ブラッシングと同時に、前記歯ブラシの動作を示す前記データを分析するためのマイクロプロセッサと、
ブラッシングと同時に、前記歯ブラシのユーザにフィードバックを提供する手段と、を含み、
前記動作センサ、前記マイクロプロセッサ及び前記フィードバック手段が協働して、実質的に即時のフィードバックを前記ユーザに提供する、歯ブラシ。
(2) 前記動作センサ、前記マイクロプロセッサ及び前記フィードバック手段が、前記ハンドル内に配置されている、実施態様1に記載の歯ブラシ。
(3) 前記フィードバック手段が、視覚、音、触覚、匂い及び味覚からなる群から選択される、前記ユーザの感覚に向けられる信号を提供する、実施態様1に記載の歯ブラシ。
(4) 前記データが、前記歯ブラシの長手方向軸に沿った動作を示す、実施態様1に記載の歯ブラシ。
(5) 前記動作センサが、加速度計を含む、実施態様1に記載の歯ブラシ。
(6) 前記加速度計が、多軸加速度計である、実施態様5に記載の歯ブラシ。
(7) 前記加速度計が、単軸加速度計である、実施態様5に記載の歯ブラシ。
(8) 前記動作を示すデータが、加速データを含む、実施態様5に記載の歯ブラシ。
(9) 前記マイクロプロセッサが、加速の計算された振動数及び加速の計算された振幅を提供する、実施態様8に記載の歯ブラシ。
(10) 前記マイクロプロセッサが、前記計算された振動数と所定の最大振動数とを比較し、前記計算された振幅と所定の最大振幅とを比較する、実施態様8に記載の歯ブラシ。
【0063】
(11) 電動歯ブラシ及び手動歯ブラシからなる群から選択される、実施態様1に記載の歯ブラシ。
(12) 実質的に即時のフィードバックを歯ブラシのユーザに提供する方法であって、
前記歯ブラシを提供することであって、前記歯ブラシが、
ブラッシングと同時に、前記歯ブラシの少なくとも1つの方向に沿った前記歯ブラシの動作を示すデータを獲得するための動作センサと、
ブラッシングと同時に、前記歯ブラシの動作を示す前記データを分析するためのマイクロプロセッサと、
ブラッシングと同時に、前記歯ブラシのユーザにフィードバックを提供する手段と、を含む、ことと、
前記歯ブラシの少なくとも1つの方向に沿った前記歯ブラシの動作を示す前記データを、ブラッシングと同時に獲得することと、
前記歯ブラシの動作を示す前記データを、ブラッシングと同時に分析することと、
ブラッシングと同時に前記歯ブラシの前記ユーザにフィードバックを提供することと、を含み、
前記動作センサ、前記マイクロプロセッサ及び前記フィードバック手段が協働して、実質的に即時のフィードバックを前記ユーザに提供する、方法。
(13) 前記動作を示すデータが、加速データを含む、実施態様12に記載の方法。
(14) 前記加速データの分析が、前記少なくとも1つの方向における前記歯ブラシの加速の振動数及び振幅を計算することと、前記加速の計算された振動数と所定の最大振動数とを比較し、かつ前記加速の計算された振幅と前記加速の所定の最大振幅とを比較することと、を含む、実施態様13に記載の方法。
(15) 前記フィードバック手段が、前記ブラッシングが強力であることを前記ユーザに警告する信号を、前記ユーザに提供する、実施態様14に記載の方法。
(16) 前記フィードバックが、前記加速の計算された振動数及び前記加速の計算された振幅の両方が、前記加速の所定の最大振動数又は前記加速の所定の最大振幅を越える場合、前記ブラッシングが強力であることを前記ユーザに警告するための、前記ユーザに提供される信号を含む、実施態様14に記載の方法。
(17) 前記フィードバックが、前記加速の計算された振動数及び前記加速の計算された振幅のいずれかが、前記加速の所定の最大振動数又は前記加速の所定の最大振幅を越える場合、前記ブラッシングが強力であることを前記ユーザに警告するための、前記ユーザに提供される信号を含む、実施態様15に記載の方法。
【技術分野】
【0001】
本発明は、歯ブラシ装置が、ユーザのブラッシングが強力過ぎる場合、実質的に即時のフィードバックを提供して歯ブラシ装置のユーザに警告するよう適合されている、手動又は電動歯ブラシ装置に関する。
【背景技術】
【0002】
歯肉上に穏やかであるとともに歯の表面から歯垢を除去するための歯ブラシの使用の有効性は、ブラッシング中のユーザのブラッシング動作、ブラッシング持続時間、及びユーザによって付与される力により影響される。歯科専門家はこれらのパラメーターを統合して、「推奨されるブラッシング技術」を作製し、この技術は、歯科診療中に歯科患者に教授される。
【0003】
ある場合に、ユーザのブラッシング動作は加速度計技術を用いて測定され、ブラッシングが完了した後にデータがユーザに間接的に提供される。そのような場合の1つにおいて、手動歯ブラシにより収集されたデータは、ブラッシングセッション中のユーザのブラッシング技術の正確な評価を、ユーザ及び/又はユーザの歯科医に提供するのに使用され得る。歯ブラシは、ブラッシング中のユーザのブラッシング動作、力及び持続時間に関するデータの時間系列を獲得し、データを収納した後、第2の装置を使用してデータを分析する。歯ブラシと第2の装置との間のユーザインターフェースは、歯ブラシのユーザ及び/又はユーザの歯科医が、ブラッシングセッションのシミュレーションを見ることを可能にする。多数のブラッシングセッションのデータを収納することもできるため、患者のブラッシング技術及び管理の履歴を集め、検討することができる。しかしながら、手動ブラシは、ブラッシングセッション中に、直接的かつ瞬間的なフィードバックをユーザに提供しない。
【0004】
加えて、電動歯ブラシで歯をブラッシングするのに使用される技術は、手動ブラシにおける技術とは異なり得る。電動歯ブラシの場合、技術は歯ブラシのヘッドを穏やかに歯の上で滑らせて、電力駆動の剛毛による洗浄を可能にする必要がある。
【発明の概要】
【発明が解決しようとする課題】
【0005】
ブラッシングセッション中に、ブラッシングのパターンを監視し、ユーザのブラッシングが強力過ぎる場合、直接的かつ実質的に瞬間的なフィードバックをユーザ提供して警告し、それにより、ブラッシングセッション中に、ユーザがユーザのブラッシング技術をより安全かつ有効なものに調整することができる、手動又は電動歯ブラシが必要とされている。
【課題を解決するための手段】
【0006】
本発明は歯ブラシに関し、歯ブラシは、ハンドルと、ネックと、ネックから延びるブラシヘッド領域を含み、ブラシヘッド領域の基部から延びる洗浄要素を含むブラシヘッド領域と、ブラッシングと同時に、歯ブラシの少なくとも1つの方向に沿った歯ブラシの動作を示すデータを獲得するための動作センサと、ブラッシングと同時に、歯ブラシの動作を示すデータを分析するためのマイクロプロセッサと、ブラッシングと同時に、ブラッシング技術の強力さのレベルに関するフィードバックを歯ブラシのユーザに提供する手段と、を含む。動作センサ、マイクロプロセッサ及びフィードバック手段は、本明細書に記載するように協働して、ユーザが歯をブラッシングしている間にブラッシング動作を調整できるように、実質的に即時のフィードバックをユーザに提供する。本発明はまた、そのような歯ブラシの使用方法にも関する。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態による歯ブラシの平面図。
【図2】図1の2−2面に沿った、図1の歯ブラシの断面図。
【図3】本発明の電動歯ブラシの使用方法の第1の実施形態の表示。
【図4】本発明の電動歯ブラシの使用方法の第2の実施形態の表示。
【図5】本発明の電動歯ブラシの使用方法の第3の実施形態の表示。
【図6a】歯ブラシが強力な様式で使用されていることを示す、本発明の電動による歯ブラシの一実施形態のx−動作のグラフ。
【図6b】歯ブラシが強力な様式で使用されていない場合の、図6aに示した実施形態のx−動作のグラフ。
【発明を実施するための形態】
【0008】
本明細書に記載の本発明による1つの方法は、手動又は電動歯ブラシの、歯ブラシの長手方向及び/又は緯度方向に沿った動作を示すデータを、ブラッシングと同時に獲得することと、ブラッシングと同時にデータを分析することと、ユーザのブラッシングが強力過ぎる場合、ブラッシングと同時にユーザにフィードバックを提供して、ブラッシングの間にユーザがブラッシング動作を調整し得るようユーザに警告することと、を含む方法を提供する。本明細書で使用される「実質的に即時のフィードバック」とは、ブラッシング中に歯ブラシから獲得された、動作を示すデータをブラッシングと同時に分析して、ユーザのブラッシングが強力過ぎるかどうかを判定し、ユーザのブラッシングが強力過ぎる場合、ブラッシングと同時にユーザにフィードバックを提供して、歯のブラッシングの間にユーザがブラッシング動作を調整し得るようユーザに警告する手段である。獲得されたデータは、ユーザが歯のブラッシングを完了した後、分析のために歯ブラシの別個の構成要素内に収納されない。
【0009】
「手動歯ブラシ」というフレーズは、その動作が歯ブラシのユーザにより生じる動作に依存する、剛毛等の洗浄要素を有する歯ブラシを意味する。「電動歯ブラシ」というフレーズは、洗浄要素の振動又は回転動作等の動作が、電力により生じる動作に依存する、剛毛等の洗浄要素を有する歯ブラシを意味する。電動歯ブラシは、電動アシスト歯ブラシとも称される。「強力なブラッシング」というフレーズは、ユーザが口腔内にて、ブラシを高い振動数及び/又は振幅で移動することを意味する。高い振動数及び高い振幅の定義は、後に論じられる。強力なブラッシングは、歯の基部における歯肉の侵食をもたらし得る。
【0010】
本方法は、例えばブラシのx、y、又はz軸等の、少なくとも1つの方向に沿った歯ブラシの動作を示すデータを獲得することを含む。いくつかの実施形態では、2つの方向又は軸に沿った歯ブラシの動作を示すデータが獲得され得る。別の実施形態では、3つの方向又は軸に沿った歯ブラシの動作を示すデータが獲得され得る。
【0011】
ブラッシング技術を監視し、ユーザのブラッシングが強力過ぎる場合、実質的に即時のフィードバックをユーザに提供してユーザに警告するのに使用される歯ブラシの一実施形態を、図1及び2に示す。図1は歯ブラシ10の平面図であり、図2は図1の2−2面に沿った歯ブラシ10の断面図である。歯ブラシ10は、ハンドル20と、ネック30と、ブラシヘッド40とを含む。
【0012】
ハンドル20内には電源22、例えば電池、マイクロプロセッサ24、動作センサ25、ユーザのブラッシングが強力過ぎる場合、ユーザにフィードバックを提供してユーザに警告するための手段26、及び電源スイッチ28が搭載されている。図示していないが、電源22はマイクロプロセッサ24、動作センサ25、フィードバック手段26、及び電源スイッチ28に接続されている。動作センサ25、マイクロプロセッサ24及びフィードバック手段26は、一緒に協働して、ユーザのブラッシングが強力過ぎるか否かに関する実質的に即時のフィードバックを歯ブラシのユーザに提供する。歯ブラシの操作中にデータが獲得及び分析される様式は、以下に更に詳細に論じられる。
【0013】
動作センサ25は、例えば、加速度計、ジャイロスコープ、又はこれらの組み合わせであることができる。いくつかの実施形態において、動作センサ25は、図1及び2に示す歯ブラシのx方向、即ち長手方向における加速を、時間の関数として測定するのに使用される単軸加速度計である。別の実施形態では、動作センサ25は二軸加速度計であり、図1及び2に示す歯ブラシのx方向(長手方向)及びy方向(緯度方向)における加速を、時間の関数として測定するのに使用される。これは、歯ブラシのヘッドの平面での歯ブラシの移動である。なお別の実施形態では、動作センサ25は三軸加速度計であり、図1及び2に示す歯ブラシのx方向、y方向、及びz方向における加速を、時間の関数として測定するのに使用される。これは、歯ブラシのヘッドの3次元移動である。例えば電池により実質的に一定の電流が加速度計に供給される際、加速度計の抵抗が動作に応答して変化し、式V=IRに従った電圧出力の変化をもたらす。好適な加速度計は、Vernier Software(Portland、OR)、Analog Devices(Norwood、MA)又はSTMicroelectronics(Carrollton、Texas)等の多数の供給元から入手可能である。
【0014】
マイクロプロセッサ24は、約10〜約200サンプル/秒、場合により約50〜約120サンプル/秒のデータ獲得率(サンプリング率)で、加速度計から加速データを受容する。マイクロプロセッサ24は、Texas Instruments(Dallas、TX)、Atmel Corporation(San Jose、CA)、Microchip Technology(Chandler、AZ)、Intel Corporation(Santa Clara、CA)及びSTMicroelectronics(Carrollton、Texas)から購入できるもの等の市販のチップの形態であってもよい。
【0015】
フィードバック手段26は、ユーザに送られる信号を提供して、ユーザのブラッシングが強力過ぎることをユーザに通知する。信号は、多数の形態であってよい。これらの信号は視覚、音、触覚、匂い、若しくは味覚の5つの感覚、又はこれらの組み合わせのいずれかの形態であってよい。一実施形態において、フィードバック手段26は、ハンドル20上の又はハンドル20の表面の中に埋め込まれた発光体又は一連の発光体であってよい。発光体はユーザのブラッシングが強力過ぎない間はオフであり、ユーザのブラッシングが強力過ぎる場合に発光してよい。
【0016】
別の実施形態では、2色の光が使用されることができる。ここでは、第1の色の発光は、ユーザのブラッシングが強力過ぎないことをユーザに通知する。ユーザが強力過ぎるブラッシングを開始した場合、第1の色の発光が薄暗くなり、第2の色の発光が明るくなる。
【0017】
一実施形態において、フィードバック手段26により提供される信号は、上記に論じたものと類似した様式で使用される音、又は一連の音の形態であってよい。音量、音の高低、音色、又は周波数の変化は、全て可能な信号である。なお別の実施形態では、ユーザのブラッシングが強力過ぎる場合、フィードバック手段26は信号として振動動作を提供してユーザに警告してよい。
【0018】
前述したように、本発明の歯ブラシは、ハンドル、ネック及びブラシヘッドを含む。ブラシヘッドは、通常は房状に配列された剛毛の形態の洗浄要素を有するであろう。洗浄房は歯の表面の洗浄を最適にする様式で、ブラシヘッドの面に配置された、およそ20〜50個の個々の剛毛から形成されている。図1は、ブラシヘッド40の房52、54の1つの配置を示す。静止房52、又は可動房54のいずれか形態であってよいブラシヘッド40上の房52、54の配置は、本発明の範囲内に限定されないことを理解すべきである。典型的な房は、直径がおよそ0.063インチ(1.6mm)であり、およそ0.079インチ2(2mm2)の断面積を有する。一般的に使用される毛の直径は、柔らかめの毛で0.006インチ(0.15mm)、中程度の毛で0.008インチ(0.2mm)、及び固めの毛で0.010インチ(0.25mm)である。
【0019】
図1及び2の実施形態に示すように、ブラシヘッド40は、房52状に配置された静止剛毛の形態の洗浄要素を含む。本実施形態は、静止房52a、52b、52c及び52dを、それぞれブラシヘッド40の先端、末端及び側部に示す。この実施形態では、ブラシヘッド40は、房54状に配置された可動剛毛も含む。可動房54は、キャリヤ42、即ち剛毛プレート又は剛毛取付けプレート上に配置されてよく、キャリヤ42は、例えばシャフト46によって房動作を生じる手段44に接続されている。房動作を生じる手段44は、並進、回転、又は振動動作を生じる装置を含むが、これらに限定されない。
【0020】
図1及び2の実施形態に示す房52及び房54は、上述しかつ図面に示した実施形態ではブラシハンドルに実質的に直交しているが、他の剛毛配置及びブラシ設計を使用してよい。例えば、剛毛は、ブラシハンドルのヘッド領域に関連して角度付けされてよい。
【0021】
ユーザのブラッシングが強力過ぎる場合、実質的に即時のフィードバックをユーザに提供してユーザに警告する、本発明の歯ブラシ10を使用する多数の異なる方法、又はモードが存在する。図3は、歯ブラシ10の使用の第1の実施形態の方法を図示する。この実施形態では、ユーザは、好ましくは標準的な洗浄動作を用いて、歯ブラシ10を移動する。ユーザは、ユーザのブラッシングが強力過ぎない場合、歯ブラシ10から正の出力信号を受容してよい。ユーザは、ユーザのブラッシングが強力過ぎる場合、歯ブラシ10から負の出力信号を受容するであろう。用語「正」及び「負」は、本明細書で、使用されているブラッシング技術が、それぞれ許容可能であり又は許容可能ではないことを示し、この用語に関連した任意の他の技術的意味は有さない。特定の実施形態では、正及び/又は負の出力信号のそれぞれは、ブラッシング期間を通じて継続してよい。別の実施形態では、正及び/又は負の出力信号のそれぞれは、ブラッシング期間の過程にわたって断続的であってよい。
【0022】
第1の工程では、歯ブラシ10が作動される。次に、任意の内部秒読みグローバルタイマーが、歯の所定のブラッシング時間にセットされる。歯の所定のブラッシング時間は、例えば、180、150、120、90、75、60、45、又は30秒であってよく、現在の口腔衛生の実践に基づいて、製造業者又はユーザにより設定されることができる。この任意の工程で、内部秒読みグローバルタイマーが開始される。
【0023】
次の工程に進行し、任意の出力信号が使用されて、歯ブラシが起動されたことをユーザに通知してよい。信号は、視覚(光)、音、触覚(振動)、匂い、又は味覚の5感のいずれかに対する多数の形態であってよい。次いで、別個のタイマーを開始させてよく、時間1の間隔において、任意の出力信号が送られ、ユーザが、例えば、次の四半分円に移動する必要があることをユーザに通知し、又はユーザがブラッシングセッションの終わりに装置を停止することを忘れた場合、装置が起動されていることを示してもよい。時間1は、例えば、30、20、15、10、又は5秒であることができる。
【0024】
次の工程に進行して、動作センサ25は、主軸、例えばx軸に沿ったブラシの変位を測定する。マイクロプロセッサ24は、動作センサ25からの歯ブラシの動作に関するデータの時間系列の受容を開始する。次いで、マイクロプロセッサは、主軸、例えばx軸に沿った動作の振動数、即ち計算された振動数、及び主軸、例えばx軸に沿った動作の振幅、即ち計算された振幅の値を計算する。データは、1、0.5、0.25、0.125、0.1、0.05、0.025、0.0125、0.01、0.005秒、又はそれ未満等の時間間隔において連続的に獲得されてよい。獲得されるデータに関する時間間隔は、規則的であってよく、又は無作為に選択されてもよい。
【0025】
得られたデータの流れをマイクロプロセッサ内のローパスデジタルフィルタに通過させてデータ中の高振動数ノイズを除去して、ユーザの動作をより明確にし、頂点、即ち極大値、及び谷、即ち極小値の検出を、より明確にすることができる。フィルタリングが達成された後、頂点及び谷の検出は、多様な方法で;例えば、勾配における変化を計算し、勾配がいつ正から負(例えば頂点)に、又は負から正(例えば谷)に、変化するかを監視することにより達成することができる。頂点及び谷が決定された後、頂点間の時間が既知となり、振動数が計算され、また頂点と続く谷との間の差が計算されて、振幅が測定される。更なるフィルタリングは、強力な状態が特定の時間、例えば、0.4秒満たされる必要条件を加えることによって達成されてよい。このことは、ブラッシングの間に、瞬間的な素早い動作を経験した場合に、ユーザが強力なブラッシング技術を告知されないことを確実にするであろう。
【0026】
プログラムの次の工程において、マイクロプロセッサ24内のオペレーティングプログラムは、第1の決定ブロックに到達する。このブロックでは、主軸に沿った動作の計算された振動数の値がFREQMAXの所定の値と比較され、主軸に沿った動作の計算された振幅の値が、AMPMAXの所定の値と比較される。これらの比較は、連続的に又は同時に行われてよい。連続的に行われる場合、比較の順序は、歯ブラシ10の性能にとって重要ではない。
【0027】
軸に沿った動作の計算された振動数の値がFREQMAXの値よりも大きい場合、又は主軸に沿った動作の計算された振幅の値がAMPMAXの値よりも大きい場合、即ち図3で第1の決定ブロックにおいて「はい」の応答の場合、マイクロプロセッサ24内のオペレーティングプログラムはフィードバック手段を介してユーザに送られる負の出力信号を生成して、ユーザのブラッシングが強力過ぎることをユーザに通知する。
【0028】
FREQMAX及びAMPMAXの値は、多数の方法を決定し得る。例えば、最大値は、販売前に予め決定され、歯ブラシ内にプログラミングされてよく、又は最大値は、ユーザの特定のブラッシング癖に基づいて決定されてもよい。FREQMAXは、1秒当たり約2回、又は3回、又はそれ以上のx方向、即ち長手方向におけるブラシの往復動作として決定されてよい。AMPMAXは、約7メートル/秒2、又はそれ以上のブラシの加速であってよい。
【0029】
下記の実施例2に論じるように、これらの値は、歯肉及び歯の損傷に繋がり得る観察されたブラッシング癖を、加速出力の振動数/周期及び振幅と相関付けることにより決定されてよい。下記の実施例2では、ブラシのx方向における、1秒当たり約4回又はそれ以上の往復動作の振動数(FREQMAX)と、約9メートル/秒2を越えるブラシの加速の振幅(AMPMAX)は、強力なブラッシングと特徴付けられた。
【0030】
FREQMAX又はAMPMAXを決定するのに使用され得る他の方法は、スライドスケール又はウエイトスケールである。スライドスケールでは、FREQMAX又はAMPMAXは、主軸に沿った動作の振動数、又は主軸に沿った動作の振幅の値に基づいてよい。第1の実施形態では、主軸に沿った動作の振幅の値が計算される。FREQMAXの値は、主軸に沿った、計算された動作の振幅の値に基づいて決定される。例えば、計算されたブラシの加速の振幅が3.0メートル/秒2の場合、FREQMAXは2に設定されてよい。一方、計算されたブラシの加速の振幅が2.0メートル/秒2の場合、FREQMAXはより大きい値、4に設定されてよい。
【0031】
第2の実施形態では、主軸に沿った動作の振動数の値が計算される。AMPMAXの値は、主軸に沿った動作の計算された振動数の値に基づいて決定される。例えば、ブラシの計算された振動数が2の場合、AMPMAXは10メートル/秒2に設定されてよい。一方、ブラシの計算された振動数が4の場合、AMPMAXはより小さい値、5メートル/秒2に設定されてよい。
【0032】
いくつかの実施形態では、振幅及び振動数は、ブラッシング技術の全体的な強力さに異なる影響を与える場合がある。それらの実施形態では、振動数及び/又は振幅に乗数を加えるウエイトスケールを使用して、特定の動作を強調してよい。
【0033】
主軸に沿った動作の計算された振動数の値がFREQMAXの値以下の場合、又は主軸に沿った動作の計算された振幅の値が、AMPMAXの値以下の場合、即ち図3で第1の決定ブロックにおいて「いいえ」の応答の場合、ユーザは、時間3の期間、ユーザのブラッシングが強力過ぎないことをユーザに通知する正の出力信号を受容するであろう。
【0034】
前述したように、フィードバック(正の出力信号又は負の出力信号のいずれかとしての)は、例えば視覚、音、触覚、匂い、若しくは味覚の5感(又は感覚の組み合わせ)のいずれかに対する信号又は信号の組み合わせの形態であってよい。信号は、ユーザが、ユーザのブラッシングが強力過ぎるか否かをユーザが判定するのに十分な期間(時間3)継続するであろう。いくつかの実施形態において、時間3は、3、2、1、0.5、又は0.25秒等の値であってよいが、これらに限定されない。別の実施形態では、フィードバックは継続的であってよく、ユーザのブラッシングがもはや強力過ぎない場合にのみ停止する。なお別の実施形態では、フィードバックは断続的であってよく、ブラッシング技術により決定されて、正と負とが交替してもよい。
【0035】
正の出力信号又は負の出力信号が終了した後、マイクロプロセッサ24内のオペレーティングプログラムは、図3に示す、任意の第2の決定ブロックに前進する。このブロックでは、内部秒読みグローバルタイマーの値が試験される。内部秒読みグローバルタイマーの値が0の場合、マイクロプロセッサ24内のオペレーティングプログラムがユーザに送られる終了信号を生成して、洗浄プロセスが完了したことをユーザに通知する。内部秒読みグローバルタイマーの値が0より大きい場合、マイクロプロセッサ24内のオペレーティングプログラムが再び第1の決定ブロックに前進し、洗浄プロセスが継続する。任意の第2の決定ブロックを有さない実施形態では、マイクロプロセッサ24内のオペレーティングプログラムが再び第1の決定ブロックに前進し、洗浄プロセスが継続する。
【0036】
図4は、歯ブラシ10の使用の第2の実施形態の方法を図示する。この実施形態では、ユーザは標準的な洗浄動作を用いて、歯ブラシ10を移動する。ユーザは、ユーザのブラッシングが強力過ぎない場合、正の出力信号を受容するであろう。ユーザは、ユーザのブラッシングが強力過ぎる場合、負の出力信号を受容するであろう。この実施形態では、動作は主軸に沿って検出されている。
【0037】
第1の工程では、歯ブラシ10が作動される。次に、任意の内部秒読みグローバルタイマーが、歯の所定のブラッシング時間にセットされる。歯の所定のブラッシング時間は、例えば、180、150、120、90、75、60、45、又は30秒であってよく、現在の口腔衛生の実践に基づいて、製造元又はユーザにより設定されてもよい。この工程では、内部秒読みグローバルタイマーが開始される。
【0038】
次の工程に進行し、出力信号が使用されて、歯ブラシが起動されたことをユーザに通知してよい。信号は、例えば視覚(光)、音、触覚(振動)、匂い、又は味覚の5感のいずれかに対する多数の形態であってよい。次いで、別個のタイマーを開始させてよく、時間1の間隔において、任意の出力信号が送られて、ユーザが、例えば、次の四半分円に移動する必要があることをユーザに通知し、又はユーザがブラッシングセッションの終わりに装置を停止することを忘れた場合、装置が起動されていることを示してもよい。時間1は、例えば、30、20、15、10、又は5秒であってよい。
【0039】
次の工程に進行して、動作センサ25は、主軸、例えばx軸に沿ったブラシの変位を測定する。マイクロプロセッサ24は、動作センサ25からの歯ブラシの動作に関するデータの時間系列の受容を開始する。次いで、マイクロプロセッサは、主軸、例えばx軸に沿った動作の振動数、即ち計算された振動数、及び主軸、例えばx軸に沿った動作の振幅、即ち計算された振幅の値を計算する。データは、1、0.5、0.25、0.125、0.1、0.05 0.025、0.0125、0.01、又は0.005、又はそれ未満の等の間隔において連続的に獲得されてよい。獲得されるデータ点に関する時間間隔は、規則的であってよく、又は無作為に選択されてもよい。
【0040】
上述したように、得られたデータの流れを、マイクロプロセッサ内の一連のフィルターを通過させて、データ中のノイズを除去してよい。
【0041】
プログラムの次の工程において、マイクロプロセッサ24内のオペレーティングプログラムは、第1の決定ブロックに到達する。このブロックでは、主軸に沿った動作の計算された振動数の値がFREQMAXの所定の値と比較され、主軸に沿った動作の計算された振幅の値が、AMPMAXの所定の値と比較される。これらの比較は、連続的に又は同時に行われてもよい。連続的に行われる場合、比較の順序は、歯ブラシ10の性能にとって重要ではない。
【0042】
軸に沿った動作の計算された振動数の値がFREQMAXの値よりも大きく、かつ主軸に沿った動作の計算された振幅の値がAMPMAXの値よりも大きい場合、即ち図4で第1の決定ブロックに対する「はい」の応答の場合、マイクロプロセッサ24内のオペレーティングプログラムは、フィードバック手段を介してユーザに送られる負の出力信号を生成して、ユーザのブラッシングが強力過ぎることをユーザに通知する。
【0043】
軸に沿った動作の計算された振動数の値がFREQMAXの値以下の場合、又は主軸に沿った動作の計算された振幅の値が、AMPMAXの値以下の場合、即ち図4で第1の決定ブロックに対する「いいえ」の応答の場合、ユーザは、時間3の期間、ユーザのブラッシングが強力過ぎないことをユーザに通知する正の出力信号を受容するであろう。
【0044】
前述したように、フィードバックは5感、例えば視覚、音、触覚、匂い、若しくは味、又は感覚の組み合わせのいずれかに対する1つ、又は多数の信号の形態であってよい。信号はユーザが、ユーザのブラッシングが強力過ぎるか否かをユーザが判定するのに十分な期間(時間3)継続するであろう。いくつかの実施形態において、時間3は、3、2、1、0.5、又は0.25秒等の値であってよいが、これらに限定されない。別の実施形態では、フィードバックは、継続的であってよく、ユーザのブラッシングがもはや強力過ぎない場合にのみ停止する。なお別の実施形態では、フィードバックは、断続的であってよく、ブラッシング技術により決定されて、正と負とが交替してもよい。
【0045】
正の出力信号又は負の出力信号が終了した後、マイクロプロセッサ24内のオペレーティングプログラムは、図4に示す、任意の第2の決定ブロックに前進する。このブロックでは、内部秒読みグローバルタイマーの値が試験される。内部秒読みグローバルタイマーの値が0の場合、マイクロプロセッサ24内のオペレーティングプログラムがユーザに送られる終了信号を有し、洗浄プロセスが完了したことをユーザに通知する。内部秒読みグローバルタイマーの値が0より大きい場合、マイクロプロセッサ24内のオペレーティングプログラムが再び第1の決定ブロックに前進し、洗浄プロセスが継続する。任意の第2の決定ブロックを有さない実施形態では、マイクロプロセッサ24内のオペレーティングプログラムが再び第1の決定ブロックに前進し、洗浄プロセスが継続する。
【0046】
図5は、歯ブラシ10の使用の第3の実施形態の方法を図示する。この実施形態では、ユーザは標準的な洗浄動作を用いて、歯ブラシ10を移動する。ユーザは、ユーザのブラッシングが強力過ぎない場合、歯ブラシ10から正の出力信号を受容するであろう。ユーザは、ユーザのブラッシングが強力過ぎる場合、負の出力信号を受容するであろう。この実施形態では、動作は2つの軸、x軸、及びy軸に沿って検出される。
【0047】
第1の工程では、歯ブラシ10が作動される。次に、任意の内部秒読みグローバルタイマーが、歯の所定のブラッシング時間にセットされる。歯の所定のブラッシング時間は、例えば、180、150、120、90、75、60、45、又は30秒であってよく、現在の口腔衛生の実践に基づいて、製造元又はユーザにより設定されてもよい。この工程では、内部秒読みグローバルタイマーが開始される。
【0048】
次の工程に進行し、任意の出力信号が使用されて、歯ブラシが起動されたことをユーザに通知する。信号は、5感、即ち視覚(光)、音、触覚(振動)、匂い、又は味覚ののいずれかに対する多数の形態であってよい。次いで、別個のタイマーを開始させてよく、時間1の間隔において、任意の出力信号が送られて、ユーザが、例えば、次の四半分円に移動する必要があることをユーザに通知し、又はユーザがブラッシングセッションの終わりに装置を停止することを忘れた場合、装置が起動されていることを示してもよい。時間1は、例えば、30、20、15、10、又は5秒であってよい。
【0049】
次の工程に進行して、動作センサ25は、主軸、例えばx軸に沿ったブラシの変位を測定する。マイクロプロセッサ24は、動作センサ25からの歯ブラシの動作に関するデータの時間系列の受容を開始する。次いで、マイクロプロセッサは、主軸、例えばx軸に沿った動作の振動数、即ち計算された振動数、及び主軸、例えばx軸に沿った動作の振幅、即ち計算された振幅の値を計算する。データは、1、0.5、0.25、0.125、0.1、0.05 0.025、0.0125、0.01、又は0.005秒、又はそれ未満等の間隔において取得されてよい。獲得されるデータ点に関する時間間隔は、規則的であってよく、又は無作為に選択されてもよい。
【0050】
上述したように、収集されたデータの流れを、マイクロプロセッサ内の一連のフィルターを通過させて、データ中のノイズを除去してよい。
【0051】
プログラムの次の工程において、マイクロプロセッサ24内のオペレーティングプログラムは、第1の決定ブロックに到達する。このブロックでは、主軸に沿った動作の計算された振動数の値がFREQMAX1の所定の値と比較され、主軸に沿った動作の計算された振幅の値が、AMPMAX1の所定の値と比較され、y軸に沿った動作の計算された振動数の値がFREQMAX2の所定の値と比較され、y軸に沿った動作の計算された振幅の値が、AMPMAX2の所定の値と比較される。
【0052】
x軸に沿った動作の計算された振動数の値がFREQMAX1の値よりも大きい場合、又はx軸に沿った動作の計算された振幅の値がAMPMAX1の値よりも大きい場合、又はy軸に沿った動作の計算された振動数の値がFREQMAX2の値よりも大きい場合、又はy軸に沿った動作の計算された振幅の値がAMPMAX2の値よりも大きい場合、即ち図5で第1の決定ブロックに対して「はい」の応答の場合、マイクロプロセッサ24内のオペレーティングプログラムは、フィードバック手段を介してユーザに負の出力信号を送って、ユーザのブラッシングが強力過ぎることをユーザに通知する。
【0053】
x軸に沿った動作の計算された振動数の値がFREQMAX1の値未満であり、かつx軸に沿った動作の計算された振幅の値がAMPMAX1の値未満であり、かつy軸に沿った動作の計算された振動数の値がFREQMAX2の値未満であり、かつy軸に沿った動作の計算された振幅の値がAMPMAX2未満であり、即ち図5で第1の決定ブロックに対して「いいえ」の応答の場合、マイクロプロセッサ24内のオペレーティングプログラムは、フィードバック手段を介してユーザに正の出力信号を送って、ユーザのブラッシングが強力過ぎないことをユーザに通知する。前述したように、フィードバックは、5感、即ち視覚、音、触覚、匂い、若しくは味、又は感覚の組み合わせのいずれかに対する信号又は信号の組み合わせの形態であってよい。信号は、ユーザが、ユーザのブラッシングが強力過ぎることをユーザが判定するのに十分な期間(時間3)継続するであろう。いくつかの実施形態において、時間3は、3、2、1、0.5、又は0.25秒等の値であってよいが、これらに限定されない。別の実施形態では、フィードバックは、継続的であってよく、ユーザのブラッシングがもはや強力過ぎない場合にのみ停止する。なお別の実施形態では、フィードバックは、断続的であってもよい。
【0054】
図5に示した実施形態において、負の出力信号は、FREQMAX1、AMPMAX1、FREQMAX2及びAMPMAX2の値の任意の1つのみの値が超過した場合、ユーザに送られて、ユーザのブラッシングが強力過ぎることを通知することに留意されたい。別の実施形態では、負の出力信号は、FREQMAX1、AMPMAX1、FREQMAX2、AMPMAX2の値の全部の値が超過した場合、ユーザに送られて、ユーザのブラッシングが強力過ぎることを通知する。更なる別の実施形態では、負の出力信号は、FREQMAX1、AMPMAX1、FREQMAX2、AMPMAX2の値のうちの2つ又は3つが超過した場合、ユーザに送られる。
【0055】
正の出力信号又は負の出力信号が終了した後、マイクロプロセッサ24内のオペレーティングプログラムは、図5に示す、任意の第2の決定ブロックに前進する。このブロックでは、内部秒読みグローバルタイマーの値が試験される。内部秒読みグローバルタイマーの値が0の場合、マイクロプロセッサ24内のオペレーティングプログラムがユーザに送られる終了信号を有し、洗浄プロセスが完了したことをユーザに通知する。内部秒読みグローバルタイマーの値が0より大きい場合、マイクロプロセッサ24内のオペレーティングプログラムが再び第1の決定ブロックに前進し、洗浄プロセスが継続する。任意の第2の決定ブロックを有さない実施形態では、マイクロプロセッサ24内のオペレーティングプログラムが再び第1の決定ブロックに前進し、洗浄プロセスが継続する。
【0056】
別の実施形態では、手動又は電動歯ブラシは交換可能なブラシ部分を含む。ここでは、センサがヘッド領域内に存在せず、ヘッドは取り外し可能かつ交換可能であってよい。ヘッドは、剛毛の摩滅が生じた後、ブラシを継続して使用できるように、例えばハンドルとねじ係合することによって接続されてよい。任意の所望のタイプの取り外し可能なヘッド又は剛毛カートリッジを使用することができる。
【実施例】
【0057】
以下の実施例は、単に実例のためのものであり、本発明を限定するものとして解釈すべきでは決してない。当業者は、添付の請求項の精神と範囲内において種々の変形が可能であることを十分理解するであろう。
【0058】
(実施例1)
x軸、即ち長手方向軸を含む電動歯ブラシと、歯ブラシに取り付けられた加速度計とを準備した。試験を行い、26人の対象が、対象の歯を歯ブラシでブラッシングしているところが観察された。それぞれの対象は、専門家から認可された歯科医により観察され、歯肉及び歯の損傷に繋がり得るブラッシング癖を特徴付け及び同定した。観察は、マジックミラーの後ろで行われ、対象のブラッシング技術と歯科医のブラッシング観察との間の任意の干渉を防いだ。ブラッシング中、歯科医によりストロークの速度と長さとを1〜9の等級で特徴付け、1が穏やか、9が強力であった。歯科医はまた、穏やかから強力のブラッシング挙動を1(穏やか)〜9(強力)の等級に特徴付けた。次いで、強力又は損傷特性(歯科医のランク付けが6を越える)を示したブラッシング癖を、加速度計からの加速出力の振動数/周期及び振幅と相関付けた。加速度計からの加速の振幅及び振動数出力を使用して、ブラッシング中の実際のストローク長さ、速度、サイクル間の時間、及びブラシの位置を同定した。
【0059】
この実施例では、強力なブラッシングを判定するのに使用された方法は、振動数及び振幅の両方に対する標準的な制限要件であった。26人の対象の試験に基づいて、ブラシのx方向における、1秒当たり4回を越える往復動作の振動数(FREQMAX)と、約9メートル/秒2を越えるブラシの加速の振幅(AMPMAX)は、強力なブラッシングと特徴付けられた。
【0060】
(実施例2)
電動歯ブラシx軸、即ち長手方向軸と、歯ブラシに取り付けられた加速度計とを準備した。実施例1のデータに基づいてFREQMAX及びAMPMAXを決定した。ブラシを作動させた後、強力なブラッシングをシミュレートするよう移動した。図6aは、電動による歯ブラシが強力な様式で、即ち大きく、速いストロークで使用されている際の歯ブラシのx方向、即ち長手方向における動作のグラフである。
【0061】
次いで、電動歯ブラシを、穏やかなブラッシングをシミュレートするよう使用した。図6bは、電動による歯ブラシが強力な様式ではなく、即ち小さく、遅いストロークで使用されている際の歯ブラシのx方向、即ち長手方向における動作のグラフである。グラフは、強力なブラッシングと強力でないブラッシングとの間の相違を示す。得られたデータはアルゴリズムに入力されて、強力なブラッシングが検出された場合、ブラッシングの間にブラッシング技術を調整できるように、ユーザのブラッシング技術に関するフィードバックをユーザに提供し得る。
【0062】
〔実施の態様〕
(1) 歯ブラシであって、
ハンドルと、
ネックと、
前記ネックから延びるブラシヘッド領域であって、前記ブラシヘッド領域の基部から延びる洗浄要素を含む、ブラシヘッド領域と、
ブラッシングと同時に、前記歯ブラシの少なくとも1つの方向に沿った前記歯ブラシの動作を示すデータを獲得するための動作センサと、
ブラッシングと同時に、前記歯ブラシの動作を示す前記データを分析するためのマイクロプロセッサと、
ブラッシングと同時に、前記歯ブラシのユーザにフィードバックを提供する手段と、を含み、
前記動作センサ、前記マイクロプロセッサ及び前記フィードバック手段が協働して、実質的に即時のフィードバックを前記ユーザに提供する、歯ブラシ。
(2) 前記動作センサ、前記マイクロプロセッサ及び前記フィードバック手段が、前記ハンドル内に配置されている、実施態様1に記載の歯ブラシ。
(3) 前記フィードバック手段が、視覚、音、触覚、匂い及び味覚からなる群から選択される、前記ユーザの感覚に向けられる信号を提供する、実施態様1に記載の歯ブラシ。
(4) 前記データが、前記歯ブラシの長手方向軸に沿った動作を示す、実施態様1に記載の歯ブラシ。
(5) 前記動作センサが、加速度計を含む、実施態様1に記載の歯ブラシ。
(6) 前記加速度計が、多軸加速度計である、実施態様5に記載の歯ブラシ。
(7) 前記加速度計が、単軸加速度計である、実施態様5に記載の歯ブラシ。
(8) 前記動作を示すデータが、加速データを含む、実施態様5に記載の歯ブラシ。
(9) 前記マイクロプロセッサが、加速の計算された振動数及び加速の計算された振幅を提供する、実施態様8に記載の歯ブラシ。
(10) 前記マイクロプロセッサが、前記計算された振動数と所定の最大振動数とを比較し、前記計算された振幅と所定の最大振幅とを比較する、実施態様8に記載の歯ブラシ。
【0063】
(11) 電動歯ブラシ及び手動歯ブラシからなる群から選択される、実施態様1に記載の歯ブラシ。
(12) 実質的に即時のフィードバックを歯ブラシのユーザに提供する方法であって、
前記歯ブラシを提供することであって、前記歯ブラシが、
ブラッシングと同時に、前記歯ブラシの少なくとも1つの方向に沿った前記歯ブラシの動作を示すデータを獲得するための動作センサと、
ブラッシングと同時に、前記歯ブラシの動作を示す前記データを分析するためのマイクロプロセッサと、
ブラッシングと同時に、前記歯ブラシのユーザにフィードバックを提供する手段と、を含む、ことと、
前記歯ブラシの少なくとも1つの方向に沿った前記歯ブラシの動作を示す前記データを、ブラッシングと同時に獲得することと、
前記歯ブラシの動作を示す前記データを、ブラッシングと同時に分析することと、
ブラッシングと同時に前記歯ブラシの前記ユーザにフィードバックを提供することと、を含み、
前記動作センサ、前記マイクロプロセッサ及び前記フィードバック手段が協働して、実質的に即時のフィードバックを前記ユーザに提供する、方法。
(13) 前記動作を示すデータが、加速データを含む、実施態様12に記載の方法。
(14) 前記加速データの分析が、前記少なくとも1つの方向における前記歯ブラシの加速の振動数及び振幅を計算することと、前記加速の計算された振動数と所定の最大振動数とを比較し、かつ前記加速の計算された振幅と前記加速の所定の最大振幅とを比較することと、を含む、実施態様13に記載の方法。
(15) 前記フィードバック手段が、前記ブラッシングが強力であることを前記ユーザに警告する信号を、前記ユーザに提供する、実施態様14に記載の方法。
(16) 前記フィードバックが、前記加速の計算された振動数及び前記加速の計算された振幅の両方が、前記加速の所定の最大振動数又は前記加速の所定の最大振幅を越える場合、前記ブラッシングが強力であることを前記ユーザに警告するための、前記ユーザに提供される信号を含む、実施態様14に記載の方法。
(17) 前記フィードバックが、前記加速の計算された振動数及び前記加速の計算された振幅のいずれかが、前記加速の所定の最大振動数又は前記加速の所定の最大振幅を越える場合、前記ブラッシングが強力であることを前記ユーザに警告するための、前記ユーザに提供される信号を含む、実施態様15に記載の方法。
【特許請求の範囲】
【請求項1】
歯ブラシであって、
ハンドルと、
ネックと、
前記ネックから延びるブラシヘッド領域であって、前記ブラシヘッド領域の基部から延びる洗浄要素を含む、ブラシヘッド領域と、
ブラッシングと同時に、前記歯ブラシの少なくとも1つの方向に沿った前記歯ブラシの動作を示すデータを獲得するための動作センサと、
ブラッシングと同時に、前記歯ブラシの動作を示す前記データを分析するためのマイクロプロセッサと、
ブラッシングと同時に、前記歯ブラシのユーザにフィードバックを提供する手段と、を含み、
前記動作センサ、前記マイクロプロセッサ及び前記フィードバック手段が協働して、実質的に即時のフィードバックを前記ユーザに提供する、歯ブラシ。
【請求項2】
前記動作センサ、前記マイクロプロセッサ及び前記フィードバック手段が、前記ハンドル内に配置されている、請求項1に記載の歯ブラシ。
【請求項3】
前記フィードバック手段が、視覚、音、触覚、匂い及び味覚からなる群から選択される、前記ユーザの感覚に向けられる信号を提供する、請求項1に記載の歯ブラシ。
【請求項4】
前記データが、前記歯ブラシの長手方向軸に沿った動作を示す、請求項1に記載の歯ブラシ。
【請求項5】
前記動作センサが、加速度計を含む、請求項1に記載の歯ブラシ。
【請求項6】
前記加速度計が、多軸加速度計である、請求項5に記載の歯ブラシ。
【請求項7】
前記加速度計が、単軸加速度計である、請求項5に記載の歯ブラシ。
【請求項8】
前記動作を示すデータが、加速データを含む、請求項5に記載の歯ブラシ。
【請求項9】
前記マイクロプロセッサが、加速の計算された振動数及び加速の計算された振幅を提供する、請求項8に記載の歯ブラシ。
【請求項10】
前記マイクロプロセッサが、前記計算された振動数と所定の最大振動数とを比較し、前記計算された振幅と所定の最大振幅とを比較する、請求項8に記載の歯ブラシ。
【請求項11】
電動歯ブラシ及び手動歯ブラシからなる群から選択される、請求項1に記載の歯ブラシ。
【請求項12】
実質的に即時のフィードバックを歯ブラシのユーザに提供する方法であって、
前記歯ブラシを提供することであって、前記歯ブラシが、
ブラッシングと同時に、前記歯ブラシの少なくとも1つの方向に沿った前記歯ブラシの動作を示すデータを獲得するための動作センサと、
ブラッシングと同時に、前記歯ブラシの動作を示す前記データを分析するためのマイクロプロセッサと、
ブラッシングと同時に、前記歯ブラシのユーザにフィードバックを提供する手段と、を含む、ことと、
前記歯ブラシの少なくとも1つの方向に沿った前記歯ブラシの動作を示す前記データを、ブラッシングと同時に獲得することと、
前記歯ブラシの動作を示す前記データを、ブラッシングと同時に分析することと、
ブラッシングと同時に前記歯ブラシの前記ユーザにフィードバックを提供することと、を含み、
前記動作センサ、前記マイクロプロセッサ及び前記フィードバック手段が協働して、実質的に即時のフィードバックを前記ユーザに提供する、方法。
【請求項13】
前記動作を示すデータが、加速データを含む、請求項12に記載の方法。
【請求項14】
前記加速データの分析が、前記少なくとも1つの方向における前記歯ブラシの加速の振動数及び振幅を計算することと、前記加速の計算された振動数と所定の最大振動数とを比較し、かつ前記加速の計算された振幅と前記加速の所定の最大振幅とを比較することと、を含む、請求項13に記載の方法。
【請求項15】
前記フィードバック手段が、前記ブラッシングが強力であることを前記ユーザに警告する信号を、前記ユーザに提供する、請求項14に記載の方法。
【請求項16】
前記フィードバックが、前記加速の計算された振動数及び前記加速の計算された振幅の両方が、前記加速の所定の最大振動数又は前記加速の所定の最大振幅を越える場合、前記ブラッシングが強力であることを前記ユーザに警告するための、前記ユーザに提供される信号を含む、請求項14に記載の方法。
【請求項17】
前記フィードバックが、前記加速の計算された振動数及び前記加速の計算された振幅のいずれかが、前記加速の所定の最大振動数又は前記加速の所定の最大振幅を越える場合、前記ブラッシングが強力であることを前記ユーザに警告するための、前記ユーザに提供される信号を含む、請求項15に記載の方法。
【請求項1】
歯ブラシであって、
ハンドルと、
ネックと、
前記ネックから延びるブラシヘッド領域であって、前記ブラシヘッド領域の基部から延びる洗浄要素を含む、ブラシヘッド領域と、
ブラッシングと同時に、前記歯ブラシの少なくとも1つの方向に沿った前記歯ブラシの動作を示すデータを獲得するための動作センサと、
ブラッシングと同時に、前記歯ブラシの動作を示す前記データを分析するためのマイクロプロセッサと、
ブラッシングと同時に、前記歯ブラシのユーザにフィードバックを提供する手段と、を含み、
前記動作センサ、前記マイクロプロセッサ及び前記フィードバック手段が協働して、実質的に即時のフィードバックを前記ユーザに提供する、歯ブラシ。
【請求項2】
前記動作センサ、前記マイクロプロセッサ及び前記フィードバック手段が、前記ハンドル内に配置されている、請求項1に記載の歯ブラシ。
【請求項3】
前記フィードバック手段が、視覚、音、触覚、匂い及び味覚からなる群から選択される、前記ユーザの感覚に向けられる信号を提供する、請求項1に記載の歯ブラシ。
【請求項4】
前記データが、前記歯ブラシの長手方向軸に沿った動作を示す、請求項1に記載の歯ブラシ。
【請求項5】
前記動作センサが、加速度計を含む、請求項1に記載の歯ブラシ。
【請求項6】
前記加速度計が、多軸加速度計である、請求項5に記載の歯ブラシ。
【請求項7】
前記加速度計が、単軸加速度計である、請求項5に記載の歯ブラシ。
【請求項8】
前記動作を示すデータが、加速データを含む、請求項5に記載の歯ブラシ。
【請求項9】
前記マイクロプロセッサが、加速の計算された振動数及び加速の計算された振幅を提供する、請求項8に記載の歯ブラシ。
【請求項10】
前記マイクロプロセッサが、前記計算された振動数と所定の最大振動数とを比較し、前記計算された振幅と所定の最大振幅とを比較する、請求項8に記載の歯ブラシ。
【請求項11】
電動歯ブラシ及び手動歯ブラシからなる群から選択される、請求項1に記載の歯ブラシ。
【請求項12】
実質的に即時のフィードバックを歯ブラシのユーザに提供する方法であって、
前記歯ブラシを提供することであって、前記歯ブラシが、
ブラッシングと同時に、前記歯ブラシの少なくとも1つの方向に沿った前記歯ブラシの動作を示すデータを獲得するための動作センサと、
ブラッシングと同時に、前記歯ブラシの動作を示す前記データを分析するためのマイクロプロセッサと、
ブラッシングと同時に、前記歯ブラシのユーザにフィードバックを提供する手段と、を含む、ことと、
前記歯ブラシの少なくとも1つの方向に沿った前記歯ブラシの動作を示す前記データを、ブラッシングと同時に獲得することと、
前記歯ブラシの動作を示す前記データを、ブラッシングと同時に分析することと、
ブラッシングと同時に前記歯ブラシの前記ユーザにフィードバックを提供することと、を含み、
前記動作センサ、前記マイクロプロセッサ及び前記フィードバック手段が協働して、実質的に即時のフィードバックを前記ユーザに提供する、方法。
【請求項13】
前記動作を示すデータが、加速データを含む、請求項12に記載の方法。
【請求項14】
前記加速データの分析が、前記少なくとも1つの方向における前記歯ブラシの加速の振動数及び振幅を計算することと、前記加速の計算された振動数と所定の最大振動数とを比較し、かつ前記加速の計算された振幅と前記加速の所定の最大振幅とを比較することと、を含む、請求項13に記載の方法。
【請求項15】
前記フィードバック手段が、前記ブラッシングが強力であることを前記ユーザに警告する信号を、前記ユーザに提供する、請求項14に記載の方法。
【請求項16】
前記フィードバックが、前記加速の計算された振動数及び前記加速の計算された振幅の両方が、前記加速の所定の最大振動数又は前記加速の所定の最大振幅を越える場合、前記ブラッシングが強力であることを前記ユーザに警告するための、前記ユーザに提供される信号を含む、請求項14に記載の方法。
【請求項17】
前記フィードバックが、前記加速の計算された振動数及び前記加速の計算された振幅のいずれかが、前記加速の所定の最大振動数又は前記加速の所定の最大振幅を越える場合、前記ブラッシングが強力であることを前記ユーザに警告するための、前記ユーザに提供される信号を含む、請求項15に記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6a】
【図6b】

【図2】
【図3】
【図4】
【図5】
【図6a】
【図6b】
【公開番号】特開2013−9958(P2013−9958A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−143936(P2012−143936)
【出願日】平成24年6月27日(2012.6.27)
【出願人】(506105814)マクニール−ピーピーシー・インコーポレーテツド (69)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2012−143936(P2012−143936)
【出願日】平成24年6月27日(2012.6.27)
【出願人】(506105814)マクニール−ピーピーシー・インコーポレーテツド (69)
【Fターム(参考)】
[ Back to top ]