
家屋異動判定方法
【課題】異動判定の精度が高く、完全自動化が可能な家屋異動判定方法を提供することを目的とする。
【解決手段】上空から取得した新旧2時期のデータに基づいてデータ取得領域内の家屋10の異動を判定する家屋の異動判定方法であって、
新データ内の所定領域を予め用意した所定領域に対応する家屋ポリゴンデータ3によりトリミングして判定対象領域1として抽出した後、
前記判定対象領域1全域に渡るカラー画像データ11の階調値と標高データ12の標高値に対する新旧2時期における2種類の差分値を評価値として演算し、
次いで、前記評価値に基づいて、予め設定された2種類の評価基準値の組み合わせによる判定テーブルを参照して判定対象領域1内の家屋異動の有無を判定して構成する。
【解決手段】上空から取得した新旧2時期のデータに基づいてデータ取得領域内の家屋10の異動を判定する家屋の異動判定方法であって、
新データ内の所定領域を予め用意した所定領域に対応する家屋ポリゴンデータ3によりトリミングして判定対象領域1として抽出した後、
前記判定対象領域1全域に渡るカラー画像データ11の階調値と標高データ12の標高値に対する新旧2時期における2種類の差分値を評価値として演算し、
次いで、前記評価値に基づいて、予め設定された2種類の評価基準値の組み合わせによる判定テーブルを参照して判定対象領域1内の家屋異動の有無を判定して構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、家屋異動判定方法に関するものである。
【背景技術】
【0002】
固定資産の異動の判定等を空中測量技術を利用して行う従来例としては、例えば特許文献1に記載されたものが知られている。
【0003】
この従来例においては、異動判定に際し、先ず、対象地域の航空機写真画像を取得し、前年に取得した航空機写真画像と比較することにより新築あるいは改築等の異動が判定される。
【特許文献1】特開平9‐61164号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、従来例には以下のような欠点がある。先ず、航空写真画像には、撮影時の日照条件の差による影位置の違い、撮影主点の差による建物の傾きの違い、人、車等の移動体の存在がすべて画面上の差として現れ、これらの要素による画像変化と建物の異動による画像変化とは画像上の情報だけでは分別不能であるために、結局人手を要することとなり、完全自動化が困難であるという問題がある。
【0005】
また、単なる色違いにより家屋の異動をすべて判定しているので色違いの判別基準以下の色変化や色変化以外での異動があった場合は全く判定されず、異動判定の精度が低い。逆に、色違いの判別基準を下げた場合には、撮影時状態による変化など微細な変化も異動があるものとされるために異動の判定漏れである誤判定や、異動でないものを異動として判定する余剰判定が増えて、結果的に精度の低下に繋がる。
【0006】
本発明は、以上の欠点を解決すべくなされたものであって、異動判定の精度が高く、完全自動化が可能な家屋異動判定方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
家屋10の異動は、単なる色違いの他にも、輝度や色成分の割合などによっても判断することができ、これら色判別を複合的に織り交ぜて複数の要素で判断することにより、異動判定の精度がより高まると考えられる。
【0008】
しかし、いくら色判別要素を増やしても同種の判定要素では限界がある。そこで、本発明では家屋10の異動の高さ変化に着目した。これら異なる種類の判断要素を織り交ぜて異動判定を行うことにより従来に比べて飛躍的に精度が高まると考えられる。
【0009】
また、家屋10の異動判定の自動化は、異動があったものの中で、家屋10の異動であるか家屋10以外の異動であるかを判定する必要があり、困難を極める。
【0010】
そこで、家屋10の異動判定が、比較される時期から判定対象時期までに、家屋10に異動があったかを判定していることに着目した。比較される時期の家屋10の異動は家屋10内で行われる異動と家屋10外で行われる異動に分かれることを見出し、家屋10を異動判定単位として両時期の比較をすれば、家屋10以外の異動を判定してしまうこともなく、家屋10のみの異動を判定することができ、結果的に家屋10の自動判定が可能になると考えた。
【0011】
本発明は、以上の見知に基づいてなされたものであり、
上空から取得した新旧2時期のデータに基づいてデータ取得領域内の家屋10の異動を判定する家屋の異動判定方法であって、
新データ内の所定領域を予め用意した所定領域に対応する家屋ポリゴンデータ3によりトリミングして判定対象領域1として抽出した後、
前記判定対象領域1全域に渡るカラー画像データ11の階調値と標高データ12の標高値に対する新旧2時期における2種類の差分値を評価値として演算し、
次いで、前記評価値に基づいて、予め設定された2種類の評価基準値の組み合わせによる判定テーブルを参照して判定対象領域1内の家屋10異動の有無を判定する家屋の異動判定方法
により達成される。
【0012】
したがって、本発明によれば、家屋10の異動判定要素として、家屋10の形状変化を色と高さという2種類の性質の全く異なる要素で行うことでより精度の高い判定をすることができる。さらに、判定要素結果の組み合わせによりさらに高い精度で判定をすることができる。
【0013】
また、家屋10の異動判定単位を家屋10内の異動と捉えて、既存家屋10の形状(家屋ポリゴンデータ3)を比較単位とした。家屋ポリゴンデータ3を使うことにより家屋10以外の異動を判定対象とすることがなく異動判定後に家屋10であるか否か判断を行う必要がなくなるために家屋10の異動判定の完全自動化が可能になる。
【0014】
また、カラー画像の評価基準値は、単なる判定領域の持つ階調値の差分や適宜差分により求めることによっても可能である。しかし、Pc(各色成分の階調数)/ΣPc(全色要素の階調数の総和)の新旧差分の平均値で判定領域内の色違いを判定すれば、判定領域が持つ各色成分の割合違いで比較することにより、より細かな判定基準となるので余剰判定を減らすことができる。
また、上記カラー画像の評価基準値の他にも、判定対象領域1全域内での色成分の階調値の新旧差分で比較することにより色成分ごとの輝度を比較することより、より細かな判定基準となり余剰判定を減らすことができる。
【0015】
また、別の発明によれば、更地に家屋10が建つような家屋ポリゴンデータ3の無い場合が存在する。この場合、家屋10の異動は全く判定されずに家屋10内の異動判定のみが行われ、限られた異動の種類しか判定が行えない。そこで、あらかじめ設定した一定領域を区切りその領域内の異動を判定する。また、家屋10内の異動を判定するのとは違い、更地に家屋10が建つような比較的高さ変化の大きい種類の家屋10の異動を判定する。
【0016】
さらに、家屋ポリゴンデータ3を利用できないような領域で、所定の領域を区切って異動判定を行う前に、あらかじめ2時期で高さの変化が生じているものを判断し、判定領域から除外しておくことで余剰判定を防ぐことができるので判定精度が高まる。
【0017】
2時期で高さの変化が生じるものとして、例えば植生域8が考えられる。植物体を適宜方法で判別し除去することで植物体における高さ変化を家屋10の異動として判定してしまうを防ぐことができる。また、標高データ12等と同時期に航空機から取得可能な植物特有の波長である赤成分(R)と近赤外により植生域8を判断することにより植生域8の判断も正確に行える。
【0018】
また、他に高さ変化を生じるものとして自動車などの一時的な高さ変化である移動体9が考えられる。自動車などの移動体9については、そのほとんどが道路上を移動することに着目し、既存の道路ポリゴンデータ等により道路領域を除去することで、植生除去同様に家屋10の異動として判定してしまうことはなくなり余剰判定を防ぐことができ、結果として判定精度が向上する。また、道路領域を判定対象から除去しても公共物である道路上に家屋10の異動があることはまれであることから問題も無い。
【0019】
さらに、上記の除去を判定の行程で行うのではなく、前処理としておこなうことで、判定の行程にかかる負担を減らすことができる。
【発明の効果】
【0020】
本願発明によれば、家屋10異動の判定を完全に自動化でき、かつ、精度の高い正確な判定をすることができる。
【発明を実施するための最良の形態】
【0021】
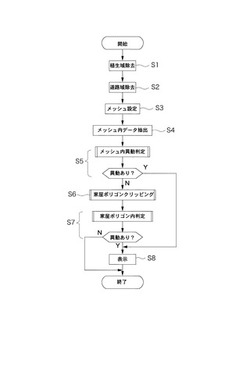
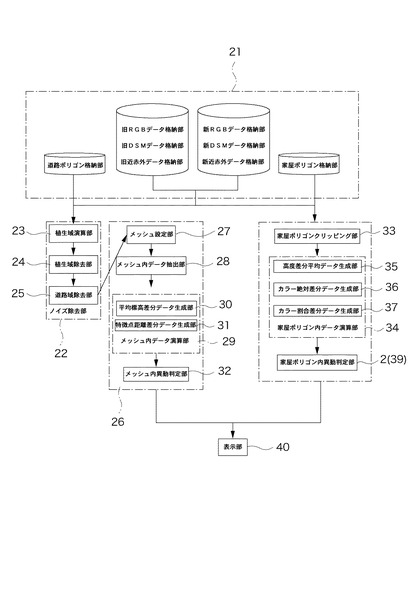
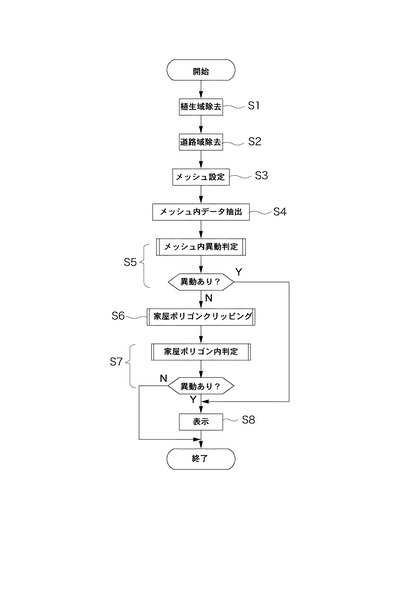
図5に本願発明のフローチャート、図4にこれを実現するための判定装置を示す。
【0022】
まず、異動判定に際し、カラー画像データ11、標高データ12、近赤外データ、道路ポリゴンデータ20および家屋ポリゴンデータ3を格納部21に用意する。調査年度と前年度の新旧時期の違いにより家屋異動を判定する本方法を例に説明する。上記カラー画像データ11、標高データ12および近赤外データは上記2時期のものが用意され、道路ポリゴンデータ20および家屋ポリゴンデータ3は前年度のものが用意され、格納部21に格納される。
【0023】
データ取得領域は、調査対象家屋10を含む適宜領域(本明細書では、後述する上記家屋ポリゴンデータ3との重合域を「判定対象領域1」、この判定対象領域1を含む比較的広域の領域を「広域判定領域」とし、撮像範囲はほぼ広域判定領域に合致する。また、調査年度および前年度におけるデータは、所定の座標決定方法により平面上で重ねることができる。)
上記カラー画像データ11は、RGB3色のカラープレーン上のm×nのドットマトリクスデータとして定義され、各ピクセルはRGBカラープレーン上の階調値(以下色成分cのm行n列のピクセル値をPc(m,n)、例えばR(赤)プレーンPr(m,n)を表す。)と定義する。
【0024】
また、標高データ12は、DSM(Digital Surface Model:地表面モデル)として与えられ、カラー画像データ11と平面上で重ねることができる。(以降、標高データ12をDSMデータ12とする。)各種ポリゴンデータは、公共団体等から提供されたものを利用することが可能であり、所定の座標変換方法により上記カラー画像空間上での位置を特定することができる。
【0025】
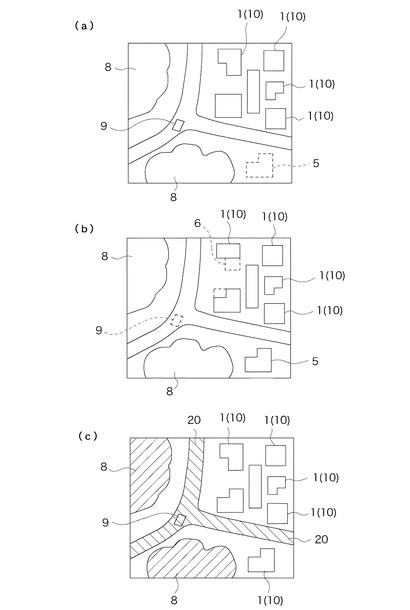
異動判定に際し、図1(c)に示すように植生域8や自動車などの移動体9といったノイズ部分を除去するために、ノイズ除去部22において前処理を実行する。ノイズ除去部22は、植生域演算部23、植生域除去部24および道路域除去部25とを有し、まず、植生域演算部23と植生域除去部24において植生域除去ステップが実行される(ステップS1)。この植生域除去ステップは、植物の色の持つ特性を利用してピクセル内の色の値と設定された閾値と比較して植生域8を判定し、判定に使用する領域内から植生域8にあたる部分を除去する。植生域除去部24では、格納部21から取り出された判定箇所のピクセルにおけるR値と近赤外値を使ってNDVI(Normalized Difference Vegetation Index:正規化植生指標)値を算出する。具体的な算出式を下記に示す。
【0026】
【数1】

【0027】
ただし、NIRはピクセル内の近赤外値である。
【0028】
そして、算出したNDVI値が植生域除去部24においてあらかじめ設定した閾値以上である場合には植生域として判断し判定対象から除外する。例えばDSMデータ値を負の値に変更することにより、植生域を除外箇所を演算対象から除外する。この結果、新旧データ間で除外箇所が異なる場合、例えば植生域だった場所に家が建ったなどの場合にも家屋の異動判定が行える。また、新旧の除外箇所が重なりあう(新データ:負、旧データ:負)ときには、通常通りに演算処理をしないなどの処理を含めるだけで無駄な判定も行わなくて済む。
【0029】
次に、道路域除去部25において道路域除去ステップが実行される(ステップS2)。この道路域除去ステップS2は、自動車などの移動体を除去するために移動体の存在する道路域自体を判定対象から除外することで移動体の除去を行う。道路域除去部25にて格納部21に格納されている道路ポリゴンデータ20を取り出し、これを前記植生域8を除外したDSMデータに重ね合わせて、重合位置のDSMデータを判定対象から除外する。除外の方法は、例えば植生域と同様に負の値に変更することにより行う。また、植生とは違い道路は、大きな変化はないことから除外された部分を演算対象から除外する処理をしても良い。
【0030】
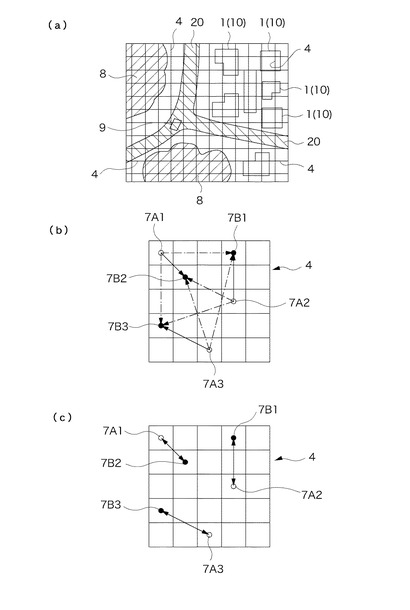
上記前処理を実行した後に、メッシュ内異動判定部26において、後述するメッシュで判定対象領域1を決定し、該領域内のDSMデータ12を元に異動判定を行うメッシュ内異動判定を実行する(ステップS5)。メッシュ内異動判定部26は、メッシュ設定部27、メッシュ内データ抽出部28、メッシュ内データ演算部29および家屋異動判定部32を有し、まず、メッシュ設定部27においてメッシュ設定ステップが実行される(ステップS3)。このメッシュ設定ステップS3は、メッシュ設定部27にて図2(a)に示すように家屋異動の判定に適した一定の大きさの複数のメッシュ4をDSMデータ12上に設定する。本実施の形態のメッシュの大きさは、5m×5mに設定される。次に、メッシュ内データ抽出部28にて、メッシュ内データ抽出ステップが実行される(ステップS4)。このメッシュ内データ抽出ステップS4は、判定対象メッシュ4においてメッシュ4内のDSMデータ12をクリッピングして実行される。
【0031】
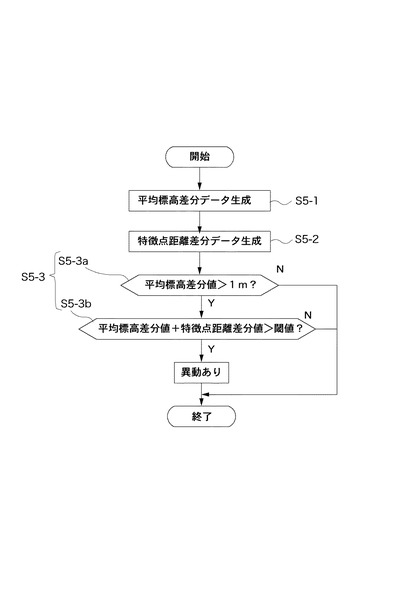
メッシュ内データ演算部29では、上記クリッピングにより得られたDSMデータから判定に用いる評価値を生成するための演算が行われ、平均標高差分データ生成部30と特徴点距離差分データ生成部31とを有し、メッシュ内異動判定ステップS5が実行される。メッシュ内異動判定ステップについて、図6を元に説明する。まず、平均標高差分データ生成部30において、平均標高差分データ生成ステップが実行される(ステップS5-1)。平均標高差分データ生成ステップS5-1は、メッシュ内データ抽出ステップS4においてクリッピングされたDSMデータ12の平均値を取って、新旧間の差分データを生成する。具体的な演算を以下に示す。
【0032】
【数2】
【0033】
ただし、Pnはメッシュ内の新DSMデータ12の各ピクセル値、Poはメッシュ内の旧DSMデータ12の各ピクセル値、Nはメッシュ内のピクセル総数である。
【0034】
次に、特徴点距離差分データ生成部31にて、特徴点距離差分データ生成ステップが実行される(ステップS5-2)。特徴点距離差分データ生成ステップS5-2は、図2(b)、(c)に示すように、メッシュ4内データ抽出ステップにおいてクリッピングされた新旧DSMデータ(標高データ)12のそれぞれから、標高の高い上位数点(ここでは3点とする)の標高上位点7(以下、「特徴点」とする。)を選ぶ(旧データ7A1,7A2,7A3、新データ7B1,7B2,7B3)。そして、これらのメッシュ4内における距離、すなわち平面上における距離を求め、ある特徴点7に対して距離が最小となる他の特徴点7を新旧間で選び出す。距離が最小の特徴点7の選び出しは、例えばメッシュ内のピクセルの座標(X座標,Y座標;図では左上を原点とし、X座標を右に、Y座標を下にとる)を基に計算することが可能であり、図2(b)に示すように、特徴点7A1(1,1)に対する特徴点7B1(1,4)、特徴点7B2(2,2)、特徴点7B3(4,1)のそれぞれの座標間の距離を順次比較し、最も距離の短い特徴点7B2(2,2)を選び出す。新データのその他の特徴点7A2、7A3についても同様に選ぶ。以上のようにして選ばれた最も距離の短い特徴点7Bについての距離を3点(7A1,7A2,7A3)について合計することにより特徴点距離差分値を生成する。
【0035】
次に、メッシュ内異動判定部32において、メッシュ内異動判定ステップが実行される(ステップ5-3)。メッシュ内家屋異動判定ステップS5-3は、ステップ5-1とステップ5-2で生成されたデータを評価値として使用し評価基準に基づいて家屋10の異動判定をする。まず、ステップ5-1で生成された平均標高差分値が1mを超える場合には、後述する特徴点距離差分データによる判定が行わる。また、図6に示すように平均標高差分値が1m以下である場合には、異動なしとして判定され処理が終了する(ステップS5-3a)。次に、平均標高差分値が1mを超えるものに関して、係数(本実施の形態において係数は0.5)を掛け合わせた平均標高差分値に、さらに係数(本実施の形態において係数は0.5)を掛け合わせた特徴点距離差分値を加えて出た値が、閾値(本実施例において閾値は1)を超える場合に異動ありとして判定される(ステップS5-3b)。この際、異動ありとされる家屋は、新築5や増築6又は減築や全壊に属するものである。また、前記値が閾値を超えない場合は、異動なしとして判定する。なお、平均標高差分値と特徴点距離差分値とにそれぞれ掛け合わされる係数と閾値は、実際の算出値と異動の結果を基にして家屋10の異動判定が正確に行えるように適宜決定される。具体的には、係数×平均標高差分値+係数×特徴点距離差分値の各々に適宜の係数をかけた線形結合式として表される。
【0036】
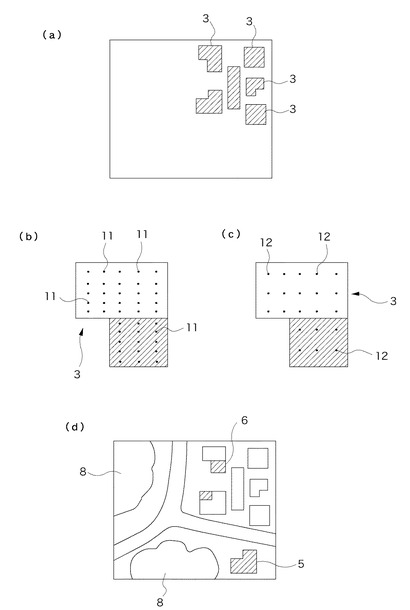
次に、家屋ポリゴンクリッピングステップS6及び家屋ポリゴン内異動判定ステップS7を実行する。以下、図5及び図7を用いて家屋ポリゴンクリッピングステップS6及び家屋ポリゴン内異動判定ステップS7について説明する。まず、家屋ポリゴンクリッピング部33において、家屋ポリゴンクリッピングステップが実行される(ステップS6)。家屋ポリゴンクリッピングステップS6は、まず、家屋ポリゴンデータ格納部21に格納されている図3(a)に示す家屋ポリゴンデータ3を新旧のDSMデータ12とRGBデータに重ね合わせる。次に、図3(b)、(c)に示すように、重ね合わされた箇所のデータをクリッピングする。
【0037】
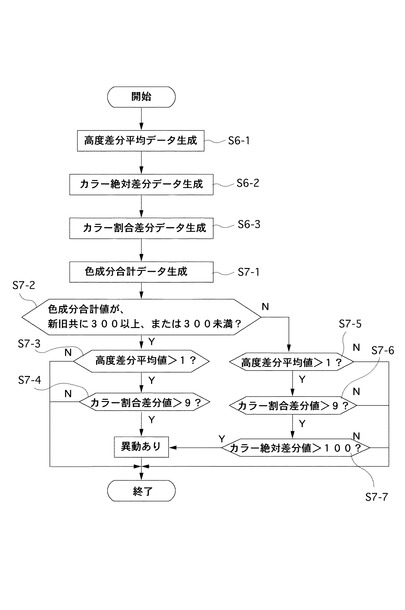
次に、上記クリッピングにより得られた各データから判定に用いるデータを生成するため家屋ポリゴン内データ演算部34において演算を実行する。家屋ポリゴン内データ演算部34は、高度差分平均データ生成部35とカラー絶対差分データ生成部36とカラー割合差分データ生成部37とを有し、まず、高度差分平均データ生成部35において、高度差分平均データ生成部ステップを実行する(ステップS6-1)。高度差分平均データ生成部ステップS6-1は、家屋ポリゴンデータ3内の各ピクセルの新旧DSMデータ12について差分を取り、その差分の家屋ポリゴンデータ3内の平均の絶対値である高度差分平均値を生成する。具体的な演算を以下に示す。
【0038】
【数3】
【0039】
ただし、Pnは家屋ポリゴン内の新DSMデータ12の各ピクセル値、
Poは家屋ポリゴン内の旧DSMデータ12の各ピクセル値、
Nは家屋ポリゴン内のピクセル総数である。
【0040】
次に、カラー絶対差分データ生成部36において、カラー絶対差分データ生成ステップを実行する(ステップS6-2)。カラー絶対差分データ生成ステップS6-3は、新旧のピクセルの各色成分(以下、各色要素という。)の平均を取り、その各色成分ごとの新旧データの差分の絶対値を合計したカラー絶対差分を生成する。具体的な演算を以下に示す。
【0041】
【数4】
【0042】
【数5】
【0043】
【数6】
【0044】
DAred+DAgreen+DAblue=カラー絶対差分
ただし、Pn(red,green,blue)(i,j)は、新RGBデータの家屋ポリゴン内のおける(赤波長、緑波長、青波長)の各ピクセル値、
Po(red,green,blue)(i,j)は、旧RGBデータの家屋ポリゴン内のおける(赤波長、緑波長、青波長)の各ピクセル値、
Nは家屋ポリゴン内のピクセル総数である。
【0045】
次に、カラー割合差分データ生成部37において、カラー割合差分データ生成ステップを実行する(ステップS6-3)。カラー割合差分データ生成ステップS6-3は、図3(b)に示す家屋ポリゴンデータ3内の各色成分(RGB)の平均値を取り、全色成分の割合を求める。そして、求められた新旧の各色成分割合の各色成分ごとの差分の絶対値を取り、その色成分ごとの絶対差分を合計したカラー割合データを生成する。この際、影で暗くなった部分は、本来の色を表していないので生成対象から除く事により精度が高まる。(生成対象から外す影部分は、各色成分の各値がすべて閾値以下のものとする。なお、本実施の形態において、閾値は50とする。)具体的な演算を以下に示す。
【0046】
【数7】
【0047】
【数8】
【0048】
【数9】
【0049】
DRred+DRgreen+DRblue=カラー割合差分
ただし、Pn(red,green,blue)(i,j)は、新RGBデータの家屋ポリゴン内のおける(赤波長、緑波長、青波長)の各ピクセル値、
Po(red,green,blue)(i,j)は、旧RGBデータの家屋ポリゴン内のおける(赤波長、緑波長、青波長)の各ピクセル値、
Nは家屋ポリゴン内のピクセル総数である。
【0050】
次に、家屋ポリゴン内異動判定部39において、家屋ポリゴン内異動判定ステップが実行される(ステップS6-5)。家屋ポリゴン内異動判定ステップS7は、S6-1からS6-3までのステップで生成されたデータを評価値として判定テーブル2を参照し評価基準に基づいて家屋10の異動判定をする。さらに、色成分合計データ生成部において、色成分合計データ生成ステップを実行する(ステップS7-1)。色成分合計データ生成ステップS7-1は、新旧ごとの色成分の総合計である色成分合計データを生成する。
【0051】
判定に先立ち、ステップS7-1で生成された新旧の色成分合計データについて場合分けをする。場合分けとしては、新旧の色成分合計データが共に、設定された閾値(本実施例において閾値は300)以上または未満である場合と新旧の色成分合計データが閾値を境にして異なるところにある場合(新データが300以上で旧データが300未満、または新データが300未満で旧データが300以上)の2種類であり、この場合分けに基づいて以下の評価基準を用いて判定を行う(ステップS7-2)。
【0052】
まず、新旧の色成分合計データが共に、設定された閾値(本実施例において閾値は300)以上または未満である場合は、高度差分平均値とカラー割合差分値を評価基準として用い、家屋異動判定部39において下記の判定テーブル2により判定を行う。高度差分平均値が設定される閾値(本実施例において閾値は1)を超えており(ステップS7-3)、かつカラー割合差分値が設定される閾値(本実施例において閾値は9)を超えている(ステップS7-4)場合に限り異動ありとする。一方、いづれかの判定基準が設定された閾値以下である場合は異動なしとされる。
【0053】
これに対して、新旧の色成分合計値が閾値を境にして異なるところにある場合は、下記の判定テーブル2により判定を行い、上記評価基準にカラー絶対差分をさらに評価基準として加える。他評価基準が閾値を超えており(ステップS7-5、ステップS7-6)、さらにカラー絶対差分値が設定される閾値(本実施例において閾値は100)を超えている(ステップS7-7)場合に限り異動ありとされる。また、同様にいづれかの評価基準でも閾値以下である場合は、異動なしとされる。
【0054】
上記判定の結果、家屋ポリゴン内異動判定において異動ありとされた家屋は、家屋内の立替新築や工事中家屋、増改築家屋である。
【0055】
また、家屋内の異動判定を行う家屋ポリゴン内異動判定をメッシュ内異動判定の前に行い、異動判定された部分をメッシュ内異動判定の判定対象から除くことや、家屋ポリゴンデータ3を使ってノイズ処理同様家屋ポリゴンデータ3を事前にメッシュ内異動判定対象から除去することも可能であり、家屋部分以外のメッシュについての判定だけを行えば足り判定対象が減るので処理が早くなる。
次に、上記判定結果に基づいて、表示部40おいて表示ステップが実行される(ステップS8)。表示ステップS8は、図3(d)に示すように判定結果によりあらかじめ設定された表示を行う。例えば、異動ありと判定された箇所だけ表示したり、異動箇所の色を変えて強調表示したり等で行われる。
【0056】
なお、メッシュ4内の異動判定が行われた時に表示を行っても良い。また、例えば異動判定が行われた箇所に対してメッシュ内異動判定及び家屋ポリゴン内異動判定の双方が行われたときに、家屋ポリゴン内異動判定を優先表示するようにしても良い。また、上述するこれらの判定方法は、上記S1ステップ以下の手順を順次実行するプログラムが走行するコンピュータにより実現できる。
【図面の簡単な説明】
【0057】
【図1】本発明を示す図で、(a)は旧カラー画像データ、(b)は新カラー画像データ、(c)はカラー画像データ上に前処理において削除した部位をハッチングした図である。
【図2】メッシュ内異動判定を示す図で、(a)は広域領域にメッシュを設定した図、(b)は新特徴点から最小距離の旧特徴点を選択する図、(c)は最小距離から選択した特徴点の距離を表した図である。
【図3】家屋ポリゴン内異動判定を示す図で、(a)は家屋ポリゴンを表した図で、(b)は家屋ポリゴン内のRGBデータをクリッピングした図、(c)は家屋ポリゴン内の標高データをクリッピングした図、(d)はメッシュ内異動判定と家屋ポリゴン内異動判定の結果を合わせて表した図である。
【図4】本発明を示すブロック図である。
【図5】全体の処理の流れを示すフローチャートである。
【図6】メッシュ内異動判定を示すフローチャートである。
【図7】家屋ポリゴンクリッピング及び家屋ポリゴン内異動判定を示すフローチャートである。
【符号の説明】
【0058】
1 判定対象領域
2 判定テーブル
3 家屋ポリゴンデータ
4 メッシュ
5 新築
6 増築
7 標高上位点
8 植生域
9 移動体
【技術分野】
【0001】
本発明は、家屋異動判定方法に関するものである。
【背景技術】
【0002】
固定資産の異動の判定等を空中測量技術を利用して行う従来例としては、例えば特許文献1に記載されたものが知られている。
【0003】
この従来例においては、異動判定に際し、先ず、対象地域の航空機写真画像を取得し、前年に取得した航空機写真画像と比較することにより新築あるいは改築等の異動が判定される。
【特許文献1】特開平9‐61164号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、従来例には以下のような欠点がある。先ず、航空写真画像には、撮影時の日照条件の差による影位置の違い、撮影主点の差による建物の傾きの違い、人、車等の移動体の存在がすべて画面上の差として現れ、これらの要素による画像変化と建物の異動による画像変化とは画像上の情報だけでは分別不能であるために、結局人手を要することとなり、完全自動化が困難であるという問題がある。
【0005】
また、単なる色違いにより家屋の異動をすべて判定しているので色違いの判別基準以下の色変化や色変化以外での異動があった場合は全く判定されず、異動判定の精度が低い。逆に、色違いの判別基準を下げた場合には、撮影時状態による変化など微細な変化も異動があるものとされるために異動の判定漏れである誤判定や、異動でないものを異動として判定する余剰判定が増えて、結果的に精度の低下に繋がる。
【0006】
本発明は、以上の欠点を解決すべくなされたものであって、異動判定の精度が高く、完全自動化が可能な家屋異動判定方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
家屋10の異動は、単なる色違いの他にも、輝度や色成分の割合などによっても判断することができ、これら色判別を複合的に織り交ぜて複数の要素で判断することにより、異動判定の精度がより高まると考えられる。
【0008】
しかし、いくら色判別要素を増やしても同種の判定要素では限界がある。そこで、本発明では家屋10の異動の高さ変化に着目した。これら異なる種類の判断要素を織り交ぜて異動判定を行うことにより従来に比べて飛躍的に精度が高まると考えられる。
【0009】
また、家屋10の異動判定の自動化は、異動があったものの中で、家屋10の異動であるか家屋10以外の異動であるかを判定する必要があり、困難を極める。
【0010】
そこで、家屋10の異動判定が、比較される時期から判定対象時期までに、家屋10に異動があったかを判定していることに着目した。比較される時期の家屋10の異動は家屋10内で行われる異動と家屋10外で行われる異動に分かれることを見出し、家屋10を異動判定単位として両時期の比較をすれば、家屋10以外の異動を判定してしまうこともなく、家屋10のみの異動を判定することができ、結果的に家屋10の自動判定が可能になると考えた。
【0011】
本発明は、以上の見知に基づいてなされたものであり、
上空から取得した新旧2時期のデータに基づいてデータ取得領域内の家屋10の異動を判定する家屋の異動判定方法であって、
新データ内の所定領域を予め用意した所定領域に対応する家屋ポリゴンデータ3によりトリミングして判定対象領域1として抽出した後、
前記判定対象領域1全域に渡るカラー画像データ11の階調値と標高データ12の標高値に対する新旧2時期における2種類の差分値を評価値として演算し、
次いで、前記評価値に基づいて、予め設定された2種類の評価基準値の組み合わせによる判定テーブルを参照して判定対象領域1内の家屋10異動の有無を判定する家屋の異動判定方法
により達成される。
【0012】
したがって、本発明によれば、家屋10の異動判定要素として、家屋10の形状変化を色と高さという2種類の性質の全く異なる要素で行うことでより精度の高い判定をすることができる。さらに、判定要素結果の組み合わせによりさらに高い精度で判定をすることができる。
【0013】
また、家屋10の異動判定単位を家屋10内の異動と捉えて、既存家屋10の形状(家屋ポリゴンデータ3)を比較単位とした。家屋ポリゴンデータ3を使うことにより家屋10以外の異動を判定対象とすることがなく異動判定後に家屋10であるか否か判断を行う必要がなくなるために家屋10の異動判定の完全自動化が可能になる。
【0014】
また、カラー画像の評価基準値は、単なる判定領域の持つ階調値の差分や適宜差分により求めることによっても可能である。しかし、Pc(各色成分の階調数)/ΣPc(全色要素の階調数の総和)の新旧差分の平均値で判定領域内の色違いを判定すれば、判定領域が持つ各色成分の割合違いで比較することにより、より細かな判定基準となるので余剰判定を減らすことができる。
また、上記カラー画像の評価基準値の他にも、判定対象領域1全域内での色成分の階調値の新旧差分で比較することにより色成分ごとの輝度を比較することより、より細かな判定基準となり余剰判定を減らすことができる。
【0015】
また、別の発明によれば、更地に家屋10が建つような家屋ポリゴンデータ3の無い場合が存在する。この場合、家屋10の異動は全く判定されずに家屋10内の異動判定のみが行われ、限られた異動の種類しか判定が行えない。そこで、あらかじめ設定した一定領域を区切りその領域内の異動を判定する。また、家屋10内の異動を判定するのとは違い、更地に家屋10が建つような比較的高さ変化の大きい種類の家屋10の異動を判定する。
【0016】
さらに、家屋ポリゴンデータ3を利用できないような領域で、所定の領域を区切って異動判定を行う前に、あらかじめ2時期で高さの変化が生じているものを判断し、判定領域から除外しておくことで余剰判定を防ぐことができるので判定精度が高まる。
【0017】
2時期で高さの変化が生じるものとして、例えば植生域8が考えられる。植物体を適宜方法で判別し除去することで植物体における高さ変化を家屋10の異動として判定してしまうを防ぐことができる。また、標高データ12等と同時期に航空機から取得可能な植物特有の波長である赤成分(R)と近赤外により植生域8を判断することにより植生域8の判断も正確に行える。
【0018】
また、他に高さ変化を生じるものとして自動車などの一時的な高さ変化である移動体9が考えられる。自動車などの移動体9については、そのほとんどが道路上を移動することに着目し、既存の道路ポリゴンデータ等により道路領域を除去することで、植生除去同様に家屋10の異動として判定してしまうことはなくなり余剰判定を防ぐことができ、結果として判定精度が向上する。また、道路領域を判定対象から除去しても公共物である道路上に家屋10の異動があることはまれであることから問題も無い。
【0019】
さらに、上記の除去を判定の行程で行うのではなく、前処理としておこなうことで、判定の行程にかかる負担を減らすことができる。
【発明の効果】
【0020】
本願発明によれば、家屋10異動の判定を完全に自動化でき、かつ、精度の高い正確な判定をすることができる。
【発明を実施するための最良の形態】
【0021】
図5に本願発明のフローチャート、図4にこれを実現するための判定装置を示す。
【0022】
まず、異動判定に際し、カラー画像データ11、標高データ12、近赤外データ、道路ポリゴンデータ20および家屋ポリゴンデータ3を格納部21に用意する。調査年度と前年度の新旧時期の違いにより家屋異動を判定する本方法を例に説明する。上記カラー画像データ11、標高データ12および近赤外データは上記2時期のものが用意され、道路ポリゴンデータ20および家屋ポリゴンデータ3は前年度のものが用意され、格納部21に格納される。
【0023】
データ取得領域は、調査対象家屋10を含む適宜領域(本明細書では、後述する上記家屋ポリゴンデータ3との重合域を「判定対象領域1」、この判定対象領域1を含む比較的広域の領域を「広域判定領域」とし、撮像範囲はほぼ広域判定領域に合致する。また、調査年度および前年度におけるデータは、所定の座標決定方法により平面上で重ねることができる。)
上記カラー画像データ11は、RGB3色のカラープレーン上のm×nのドットマトリクスデータとして定義され、各ピクセルはRGBカラープレーン上の階調値(以下色成分cのm行n列のピクセル値をPc(m,n)、例えばR(赤)プレーンPr(m,n)を表す。)と定義する。
【0024】
また、標高データ12は、DSM(Digital Surface Model:地表面モデル)として与えられ、カラー画像データ11と平面上で重ねることができる。(以降、標高データ12をDSMデータ12とする。)各種ポリゴンデータは、公共団体等から提供されたものを利用することが可能であり、所定の座標変換方法により上記カラー画像空間上での位置を特定することができる。
【0025】
異動判定に際し、図1(c)に示すように植生域8や自動車などの移動体9といったノイズ部分を除去するために、ノイズ除去部22において前処理を実行する。ノイズ除去部22は、植生域演算部23、植生域除去部24および道路域除去部25とを有し、まず、植生域演算部23と植生域除去部24において植生域除去ステップが実行される(ステップS1)。この植生域除去ステップは、植物の色の持つ特性を利用してピクセル内の色の値と設定された閾値と比較して植生域8を判定し、判定に使用する領域内から植生域8にあたる部分を除去する。植生域除去部24では、格納部21から取り出された判定箇所のピクセルにおけるR値と近赤外値を使ってNDVI(Normalized Difference Vegetation Index:正規化植生指標)値を算出する。具体的な算出式を下記に示す。
【0026】
【数1】
【0027】
ただし、NIRはピクセル内の近赤外値である。
【0028】
そして、算出したNDVI値が植生域除去部24においてあらかじめ設定した閾値以上である場合には植生域として判断し判定対象から除外する。例えばDSMデータ値を負の値に変更することにより、植生域を除外箇所を演算対象から除外する。この結果、新旧データ間で除外箇所が異なる場合、例えば植生域だった場所に家が建ったなどの場合にも家屋の異動判定が行える。また、新旧の除外箇所が重なりあう(新データ:負、旧データ:負)ときには、通常通りに演算処理をしないなどの処理を含めるだけで無駄な判定も行わなくて済む。
【0029】
次に、道路域除去部25において道路域除去ステップが実行される(ステップS2)。この道路域除去ステップS2は、自動車などの移動体を除去するために移動体の存在する道路域自体を判定対象から除外することで移動体の除去を行う。道路域除去部25にて格納部21に格納されている道路ポリゴンデータ20を取り出し、これを前記植生域8を除外したDSMデータに重ね合わせて、重合位置のDSMデータを判定対象から除外する。除外の方法は、例えば植生域と同様に負の値に変更することにより行う。また、植生とは違い道路は、大きな変化はないことから除外された部分を演算対象から除外する処理をしても良い。
【0030】
上記前処理を実行した後に、メッシュ内異動判定部26において、後述するメッシュで判定対象領域1を決定し、該領域内のDSMデータ12を元に異動判定を行うメッシュ内異動判定を実行する(ステップS5)。メッシュ内異動判定部26は、メッシュ設定部27、メッシュ内データ抽出部28、メッシュ内データ演算部29および家屋異動判定部32を有し、まず、メッシュ設定部27においてメッシュ設定ステップが実行される(ステップS3)。このメッシュ設定ステップS3は、メッシュ設定部27にて図2(a)に示すように家屋異動の判定に適した一定の大きさの複数のメッシュ4をDSMデータ12上に設定する。本実施の形態のメッシュの大きさは、5m×5mに設定される。次に、メッシュ内データ抽出部28にて、メッシュ内データ抽出ステップが実行される(ステップS4)。このメッシュ内データ抽出ステップS4は、判定対象メッシュ4においてメッシュ4内のDSMデータ12をクリッピングして実行される。
【0031】
メッシュ内データ演算部29では、上記クリッピングにより得られたDSMデータから判定に用いる評価値を生成するための演算が行われ、平均標高差分データ生成部30と特徴点距離差分データ生成部31とを有し、メッシュ内異動判定ステップS5が実行される。メッシュ内異動判定ステップについて、図6を元に説明する。まず、平均標高差分データ生成部30において、平均標高差分データ生成ステップが実行される(ステップS5-1)。平均標高差分データ生成ステップS5-1は、メッシュ内データ抽出ステップS4においてクリッピングされたDSMデータ12の平均値を取って、新旧間の差分データを生成する。具体的な演算を以下に示す。
【0032】
【数2】
【0033】
ただし、Pnはメッシュ内の新DSMデータ12の各ピクセル値、Poはメッシュ内の旧DSMデータ12の各ピクセル値、Nはメッシュ内のピクセル総数である。
【0034】
次に、特徴点距離差分データ生成部31にて、特徴点距離差分データ生成ステップが実行される(ステップS5-2)。特徴点距離差分データ生成ステップS5-2は、図2(b)、(c)に示すように、メッシュ4内データ抽出ステップにおいてクリッピングされた新旧DSMデータ(標高データ)12のそれぞれから、標高の高い上位数点(ここでは3点とする)の標高上位点7(以下、「特徴点」とする。)を選ぶ(旧データ7A1,7A2,7A3、新データ7B1,7B2,7B3)。そして、これらのメッシュ4内における距離、すなわち平面上における距離を求め、ある特徴点7に対して距離が最小となる他の特徴点7を新旧間で選び出す。距離が最小の特徴点7の選び出しは、例えばメッシュ内のピクセルの座標(X座標,Y座標;図では左上を原点とし、X座標を右に、Y座標を下にとる)を基に計算することが可能であり、図2(b)に示すように、特徴点7A1(1,1)に対する特徴点7B1(1,4)、特徴点7B2(2,2)、特徴点7B3(4,1)のそれぞれの座標間の距離を順次比較し、最も距離の短い特徴点7B2(2,2)を選び出す。新データのその他の特徴点7A2、7A3についても同様に選ぶ。以上のようにして選ばれた最も距離の短い特徴点7Bについての距離を3点(7A1,7A2,7A3)について合計することにより特徴点距離差分値を生成する。
【0035】
次に、メッシュ内異動判定部32において、メッシュ内異動判定ステップが実行される(ステップ5-3)。メッシュ内家屋異動判定ステップS5-3は、ステップ5-1とステップ5-2で生成されたデータを評価値として使用し評価基準に基づいて家屋10の異動判定をする。まず、ステップ5-1で生成された平均標高差分値が1mを超える場合には、後述する特徴点距離差分データによる判定が行わる。また、図6に示すように平均標高差分値が1m以下である場合には、異動なしとして判定され処理が終了する(ステップS5-3a)。次に、平均標高差分値が1mを超えるものに関して、係数(本実施の形態において係数は0.5)を掛け合わせた平均標高差分値に、さらに係数(本実施の形態において係数は0.5)を掛け合わせた特徴点距離差分値を加えて出た値が、閾値(本実施例において閾値は1)を超える場合に異動ありとして判定される(ステップS5-3b)。この際、異動ありとされる家屋は、新築5や増築6又は減築や全壊に属するものである。また、前記値が閾値を超えない場合は、異動なしとして判定する。なお、平均標高差分値と特徴点距離差分値とにそれぞれ掛け合わされる係数と閾値は、実際の算出値と異動の結果を基にして家屋10の異動判定が正確に行えるように適宜決定される。具体的には、係数×平均標高差分値+係数×特徴点距離差分値の各々に適宜の係数をかけた線形結合式として表される。
【0036】
次に、家屋ポリゴンクリッピングステップS6及び家屋ポリゴン内異動判定ステップS7を実行する。以下、図5及び図7を用いて家屋ポリゴンクリッピングステップS6及び家屋ポリゴン内異動判定ステップS7について説明する。まず、家屋ポリゴンクリッピング部33において、家屋ポリゴンクリッピングステップが実行される(ステップS6)。家屋ポリゴンクリッピングステップS6は、まず、家屋ポリゴンデータ格納部21に格納されている図3(a)に示す家屋ポリゴンデータ3を新旧のDSMデータ12とRGBデータに重ね合わせる。次に、図3(b)、(c)に示すように、重ね合わされた箇所のデータをクリッピングする。
【0037】
次に、上記クリッピングにより得られた各データから判定に用いるデータを生成するため家屋ポリゴン内データ演算部34において演算を実行する。家屋ポリゴン内データ演算部34は、高度差分平均データ生成部35とカラー絶対差分データ生成部36とカラー割合差分データ生成部37とを有し、まず、高度差分平均データ生成部35において、高度差分平均データ生成部ステップを実行する(ステップS6-1)。高度差分平均データ生成部ステップS6-1は、家屋ポリゴンデータ3内の各ピクセルの新旧DSMデータ12について差分を取り、その差分の家屋ポリゴンデータ3内の平均の絶対値である高度差分平均値を生成する。具体的な演算を以下に示す。
【0038】
【数3】
【0039】
ただし、Pnは家屋ポリゴン内の新DSMデータ12の各ピクセル値、
Poは家屋ポリゴン内の旧DSMデータ12の各ピクセル値、
Nは家屋ポリゴン内のピクセル総数である。
【0040】
次に、カラー絶対差分データ生成部36において、カラー絶対差分データ生成ステップを実行する(ステップS6-2)。カラー絶対差分データ生成ステップS6-3は、新旧のピクセルの各色成分(以下、各色要素という。)の平均を取り、その各色成分ごとの新旧データの差分の絶対値を合計したカラー絶対差分を生成する。具体的な演算を以下に示す。
【0041】
【数4】
【0042】
【数5】
【0043】
【数6】
【0044】
DAred+DAgreen+DAblue=カラー絶対差分
ただし、Pn(red,green,blue)(i,j)は、新RGBデータの家屋ポリゴン内のおける(赤波長、緑波長、青波長)の各ピクセル値、
Po(red,green,blue)(i,j)は、旧RGBデータの家屋ポリゴン内のおける(赤波長、緑波長、青波長)の各ピクセル値、
Nは家屋ポリゴン内のピクセル総数である。
【0045】
次に、カラー割合差分データ生成部37において、カラー割合差分データ生成ステップを実行する(ステップS6-3)。カラー割合差分データ生成ステップS6-3は、図3(b)に示す家屋ポリゴンデータ3内の各色成分(RGB)の平均値を取り、全色成分の割合を求める。そして、求められた新旧の各色成分割合の各色成分ごとの差分の絶対値を取り、その色成分ごとの絶対差分を合計したカラー割合データを生成する。この際、影で暗くなった部分は、本来の色を表していないので生成対象から除く事により精度が高まる。(生成対象から外す影部分は、各色成分の各値がすべて閾値以下のものとする。なお、本実施の形態において、閾値は50とする。)具体的な演算を以下に示す。
【0046】
【数7】
【0047】
【数8】
【0048】
【数9】
【0049】
DRred+DRgreen+DRblue=カラー割合差分
ただし、Pn(red,green,blue)(i,j)は、新RGBデータの家屋ポリゴン内のおける(赤波長、緑波長、青波長)の各ピクセル値、
Po(red,green,blue)(i,j)は、旧RGBデータの家屋ポリゴン内のおける(赤波長、緑波長、青波長)の各ピクセル値、
Nは家屋ポリゴン内のピクセル総数である。
【0050】
次に、家屋ポリゴン内異動判定部39において、家屋ポリゴン内異動判定ステップが実行される(ステップS6-5)。家屋ポリゴン内異動判定ステップS7は、S6-1からS6-3までのステップで生成されたデータを評価値として判定テーブル2を参照し評価基準に基づいて家屋10の異動判定をする。さらに、色成分合計データ生成部において、色成分合計データ生成ステップを実行する(ステップS7-1)。色成分合計データ生成ステップS7-1は、新旧ごとの色成分の総合計である色成分合計データを生成する。
【0051】
判定に先立ち、ステップS7-1で生成された新旧の色成分合計データについて場合分けをする。場合分けとしては、新旧の色成分合計データが共に、設定された閾値(本実施例において閾値は300)以上または未満である場合と新旧の色成分合計データが閾値を境にして異なるところにある場合(新データが300以上で旧データが300未満、または新データが300未満で旧データが300以上)の2種類であり、この場合分けに基づいて以下の評価基準を用いて判定を行う(ステップS7-2)。
【0052】
まず、新旧の色成分合計データが共に、設定された閾値(本実施例において閾値は300)以上または未満である場合は、高度差分平均値とカラー割合差分値を評価基準として用い、家屋異動判定部39において下記の判定テーブル2により判定を行う。高度差分平均値が設定される閾値(本実施例において閾値は1)を超えており(ステップS7-3)、かつカラー割合差分値が設定される閾値(本実施例において閾値は9)を超えている(ステップS7-4)場合に限り異動ありとする。一方、いづれかの判定基準が設定された閾値以下である場合は異動なしとされる。
【0053】
これに対して、新旧の色成分合計値が閾値を境にして異なるところにある場合は、下記の判定テーブル2により判定を行い、上記評価基準にカラー絶対差分をさらに評価基準として加える。他評価基準が閾値を超えており(ステップS7-5、ステップS7-6)、さらにカラー絶対差分値が設定される閾値(本実施例において閾値は100)を超えている(ステップS7-7)場合に限り異動ありとされる。また、同様にいづれかの評価基準でも閾値以下である場合は、異動なしとされる。
【0054】
上記判定の結果、家屋ポリゴン内異動判定において異動ありとされた家屋は、家屋内の立替新築や工事中家屋、増改築家屋である。
【0055】
また、家屋内の異動判定を行う家屋ポリゴン内異動判定をメッシュ内異動判定の前に行い、異動判定された部分をメッシュ内異動判定の判定対象から除くことや、家屋ポリゴンデータ3を使ってノイズ処理同様家屋ポリゴンデータ3を事前にメッシュ内異動判定対象から除去することも可能であり、家屋部分以外のメッシュについての判定だけを行えば足り判定対象が減るので処理が早くなる。
次に、上記判定結果に基づいて、表示部40おいて表示ステップが実行される(ステップS8)。表示ステップS8は、図3(d)に示すように判定結果によりあらかじめ設定された表示を行う。例えば、異動ありと判定された箇所だけ表示したり、異動箇所の色を変えて強調表示したり等で行われる。
【0056】
なお、メッシュ4内の異動判定が行われた時に表示を行っても良い。また、例えば異動判定が行われた箇所に対してメッシュ内異動判定及び家屋ポリゴン内異動判定の双方が行われたときに、家屋ポリゴン内異動判定を優先表示するようにしても良い。また、上述するこれらの判定方法は、上記S1ステップ以下の手順を順次実行するプログラムが走行するコンピュータにより実現できる。
【図面の簡単な説明】
【0057】
【図1】本発明を示す図で、(a)は旧カラー画像データ、(b)は新カラー画像データ、(c)はカラー画像データ上に前処理において削除した部位をハッチングした図である。
【図2】メッシュ内異動判定を示す図で、(a)は広域領域にメッシュを設定した図、(b)は新特徴点から最小距離の旧特徴点を選択する図、(c)は最小距離から選択した特徴点の距離を表した図である。
【図3】家屋ポリゴン内異動判定を示す図で、(a)は家屋ポリゴンを表した図で、(b)は家屋ポリゴン内のRGBデータをクリッピングした図、(c)は家屋ポリゴン内の標高データをクリッピングした図、(d)はメッシュ内異動判定と家屋ポリゴン内異動判定の結果を合わせて表した図である。
【図4】本発明を示すブロック図である。
【図5】全体の処理の流れを示すフローチャートである。
【図6】メッシュ内異動判定を示すフローチャートである。
【図7】家屋ポリゴンクリッピング及び家屋ポリゴン内異動判定を示すフローチャートである。
【符号の説明】
【0058】
1 判定対象領域
2 判定テーブル
3 家屋ポリゴンデータ
4 メッシュ
5 新築
6 増築
7 標高上位点
8 植生域
9 移動体
【特許請求の範囲】
【請求項1】
上空から取得した新旧2時期のデータに基づいてデータ取得領域内の家屋の異動を判定する家屋の異動判定方法であって、
2時期のデータ内の所定領域を予め用意した所定領域に対応する家屋ポリゴンデータによりトリミングして判定対象領域として抽出した後、
前記判定対象領域全域に渡るカラー画像データの階調値と標高データの標高値に対する新旧2時期における2種類の差分値を評価値として演算し、
次いで、前記評価値に基づいて、予め設定された2種類の評価基準値の組み合わせによる判定テーブルを参照して判定対象領域内の家屋異動の有無を判定する家屋の異動判定方法。
【請求項2】
前記カラー画像データに対する評価値が、
Pc/ΣPc
但し、Pcは色要素(c)の階調数、
ΣPcは全色要素の階調数の総和、
の新旧差分の平均値で与えられる請求項1記載の家屋の異動判定方法。
【請求項3】
前記カラー画像データに対する評価値が、
判定対象領域全域内での色成分の階調値の新旧差分で与えられる請求項1記載の家屋の異動判定方法。
【請求項4】
前記判定テーブルによる判定に先立って、
新旧画像データに対して、各色成分の階調値合計に基づいて定義され、所定の境界値により区分される輝度域を決定する評価用輝度値を演算し、
新旧画像データが同一輝度域に属する場合には、カラー画像データに対して請求項2に記載の評価値を使用するとともに、
異なった輝度域に属する場合には、カラー画像データに対して請求項2、3の双方に記載の評価値を使用する家屋の異動判定方法。
【請求項5】
前記判定対象領域を含む広域判定領域内に所定のメッシュを設定した後、
各メッシュに対して標高値差分を基準とするメッシュ標高判定値を設定し、
該メッシュ標高判定値により広域判定領域内での家屋異動の有無を判定し、
前記判定対象領域内での判定結果と前記広域判定領域内での判定結果との論理和により異動判定を行う請求項1乃至4のいずれかに記載の家屋の異動判定方法。
【請求項6】
上空から取得した新旧2時期のデータに基づいてデータ取得領域内の家屋の異動を判定する家屋の異動判定方法であって、
2時期のデータ内の判定対象領域内に所定のメッシュを設定した後、
各メッシュに対して標高値差分を基準とするメッシュ標高判定値を設定し、
該メッシュ標高判定値により判定領域内での家屋異動の有無を判定する家屋の異動判定方法。
【請求項7】
前記メッシュ標高判定値は、
メッシュ内の標高平均の新旧間差分と、
新旧同一メッシュ内に抽出される適数の標高上位点の新旧間距離差分に基づく評価値との線形結合値として与えられる請求項5または請求項6に記載の異動判定方法。
【請求項8】
前記判定対象領域内での判定または前記広域判定領域内での判定に先立って、予め植生域を演算対象から除去する請求項1乃至7記載の家屋判定方法。
【請求項9】
前記判定対象領域内での判定または前記広域判定領域内での判定に先立って、予め移動体を演算対象から除去する請求項1乃至8記載の家屋判定方法。
【請求項10】
上空から取得した新旧2時期のデータに基づいてデータ取得領域内の家屋の異動を判定する家屋の異動判定プログラムであって、
2時期のデータ内の所定領域を予め用意した所定領域に対応する家屋ポリゴンデータによりトリミングして判定対象領域として抽出する手順と、
前記判定対象領域全域に渡るカラー画像データの階調値と標高データの標高値に対する新旧2時期における2種類の差分値を評価値として演算する手順と、
次いで、前記評価値に基づいて、予め設定された2種類の評価基準値の組み合わせによる判定テーブルを参照して判定対象領域内の家屋異動の有無を判定する手順とをコンピュータに実行させるための家屋の異動判定プログラム。
【請求項11】
前記カラー画像データに対する評価値が、
Pc/ΣPc
但し、Pcは色要素(c)の階調数、
ΣPcは全色要素の階調数の総和、
の新旧差分の平均値で与えられる請求項9記載の家屋の異動判定プログラム。
【請求項12】
前記カラー画像データに対する評価値が、
判定対象領域全域内での色成分の階調値の新旧差分で与えられる請求項9記載の家屋の異動判定プログラム。
【請求項13】
前記判定テーブルによる判定に先立って、
新旧画像データに対して、各色成分の階調値合計に基づいて定義され、所定の境界値により区分される輝度域を決定する評価用輝度値を演算する手順と、
新旧画像データが同一輝度域に属する場合には、カラー画像データに対して請求項10記載の評価値を使用するとともに、
異なった輝度域に属する場合には、カラー画像データに対して請求項10、11の双方に記載の評価値を使用する家屋の異動判定プログラム。
【請求項14】
前記判定対象領域を含む広域判定領域内に所定のメッシュを設定する手順と、
各メッシュに対して標高値差分を基準とするメッシュ標高判定値を設定する手順と、
該メッシュ標高判定値により広域判定領域内での家屋異動の有無を判定し、
前記判定対象領域内での判定結果と前記広域判定領域内での判定結果との論理和により異動判定を行う請求項10乃至13のいずれかに記載の家屋の異動判定プログラム。
【請求項15】
上空から取得した新旧2時期のデータに基づいてデータ取得領域内の家屋の異動を判定する家屋の異動判定プログラムであって、
2時期のデータ内の判定対象領域内に所定のメッシュを設定する手順と、
各メッシュに対して標高値差分を基準とするメッシュ標高判定値を設定する手順と、
該メッシュ標高判定値により判定領域内での家屋異動の有無を判定する手順とをコンピュータに実行させるための家屋の異動判定プログラム。
【請求項16】
前記メッシュ標高判定値は、
メッシュ内の標高平均の新旧間差分と、
新旧同一メッシュ内に抽出される適数の標高上位点の新旧間距離差分に基づく評価値との線形結合値として与えられる請求項14または13記載の家屋の異動判定プログラム。
【請求項17】
前記判定に先立って、予め植生域を演算対象から除去する手順をコンピュータに実行させるための請求項10乃至16記載の家屋の異動判定プログラム。
【請求項18】
前記判定に先立って、予め移動体を演算対象から除去する手順をコンピュータに実行させるための請求項10乃至17記載の家屋の異動判定プログラム。
【請求項1】
上空から取得した新旧2時期のデータに基づいてデータ取得領域内の家屋の異動を判定する家屋の異動判定方法であって、
2時期のデータ内の所定領域を予め用意した所定領域に対応する家屋ポリゴンデータによりトリミングして判定対象領域として抽出した後、
前記判定対象領域全域に渡るカラー画像データの階調値と標高データの標高値に対する新旧2時期における2種類の差分値を評価値として演算し、
次いで、前記評価値に基づいて、予め設定された2種類の評価基準値の組み合わせによる判定テーブルを参照して判定対象領域内の家屋異動の有無を判定する家屋の異動判定方法。
【請求項2】
前記カラー画像データに対する評価値が、
Pc/ΣPc
但し、Pcは色要素(c)の階調数、
ΣPcは全色要素の階調数の総和、
の新旧差分の平均値で与えられる請求項1記載の家屋の異動判定方法。
【請求項3】
前記カラー画像データに対する評価値が、
判定対象領域全域内での色成分の階調値の新旧差分で与えられる請求項1記載の家屋の異動判定方法。
【請求項4】
前記判定テーブルによる判定に先立って、
新旧画像データに対して、各色成分の階調値合計に基づいて定義され、所定の境界値により区分される輝度域を決定する評価用輝度値を演算し、
新旧画像データが同一輝度域に属する場合には、カラー画像データに対して請求項2に記載の評価値を使用するとともに、
異なった輝度域に属する場合には、カラー画像データに対して請求項2、3の双方に記載の評価値を使用する家屋の異動判定方法。
【請求項5】
前記判定対象領域を含む広域判定領域内に所定のメッシュを設定した後、
各メッシュに対して標高値差分を基準とするメッシュ標高判定値を設定し、
該メッシュ標高判定値により広域判定領域内での家屋異動の有無を判定し、
前記判定対象領域内での判定結果と前記広域判定領域内での判定結果との論理和により異動判定を行う請求項1乃至4のいずれかに記載の家屋の異動判定方法。
【請求項6】
上空から取得した新旧2時期のデータに基づいてデータ取得領域内の家屋の異動を判定する家屋の異動判定方法であって、
2時期のデータ内の判定対象領域内に所定のメッシュを設定した後、
各メッシュに対して標高値差分を基準とするメッシュ標高判定値を設定し、
該メッシュ標高判定値により判定領域内での家屋異動の有無を判定する家屋の異動判定方法。
【請求項7】
前記メッシュ標高判定値は、
メッシュ内の標高平均の新旧間差分と、
新旧同一メッシュ内に抽出される適数の標高上位点の新旧間距離差分に基づく評価値との線形結合値として与えられる請求項5または請求項6に記載の異動判定方法。
【請求項8】
前記判定対象領域内での判定または前記広域判定領域内での判定に先立って、予め植生域を演算対象から除去する請求項1乃至7記載の家屋判定方法。
【請求項9】
前記判定対象領域内での判定または前記広域判定領域内での判定に先立って、予め移動体を演算対象から除去する請求項1乃至8記載の家屋判定方法。
【請求項10】
上空から取得した新旧2時期のデータに基づいてデータ取得領域内の家屋の異動を判定する家屋の異動判定プログラムであって、
2時期のデータ内の所定領域を予め用意した所定領域に対応する家屋ポリゴンデータによりトリミングして判定対象領域として抽出する手順と、
前記判定対象領域全域に渡るカラー画像データの階調値と標高データの標高値に対する新旧2時期における2種類の差分値を評価値として演算する手順と、
次いで、前記評価値に基づいて、予め設定された2種類の評価基準値の組み合わせによる判定テーブルを参照して判定対象領域内の家屋異動の有無を判定する手順とをコンピュータに実行させるための家屋の異動判定プログラム。
【請求項11】
前記カラー画像データに対する評価値が、
Pc/ΣPc
但し、Pcは色要素(c)の階調数、
ΣPcは全色要素の階調数の総和、
の新旧差分の平均値で与えられる請求項9記載の家屋の異動判定プログラム。
【請求項12】
前記カラー画像データに対する評価値が、
判定対象領域全域内での色成分の階調値の新旧差分で与えられる請求項9記載の家屋の異動判定プログラム。
【請求項13】
前記判定テーブルによる判定に先立って、
新旧画像データに対して、各色成分の階調値合計に基づいて定義され、所定の境界値により区分される輝度域を決定する評価用輝度値を演算する手順と、
新旧画像データが同一輝度域に属する場合には、カラー画像データに対して請求項10記載の評価値を使用するとともに、
異なった輝度域に属する場合には、カラー画像データに対して請求項10、11の双方に記載の評価値を使用する家屋の異動判定プログラム。
【請求項14】
前記判定対象領域を含む広域判定領域内に所定のメッシュを設定する手順と、
各メッシュに対して標高値差分を基準とするメッシュ標高判定値を設定する手順と、
該メッシュ標高判定値により広域判定領域内での家屋異動の有無を判定し、
前記判定対象領域内での判定結果と前記広域判定領域内での判定結果との論理和により異動判定を行う請求項10乃至13のいずれかに記載の家屋の異動判定プログラム。
【請求項15】
上空から取得した新旧2時期のデータに基づいてデータ取得領域内の家屋の異動を判定する家屋の異動判定プログラムであって、
2時期のデータ内の判定対象領域内に所定のメッシュを設定する手順と、
各メッシュに対して標高値差分を基準とするメッシュ標高判定値を設定する手順と、
該メッシュ標高判定値により判定領域内での家屋異動の有無を判定する手順とをコンピュータに実行させるための家屋の異動判定プログラム。
【請求項16】
前記メッシュ標高判定値は、
メッシュ内の標高平均の新旧間差分と、
新旧同一メッシュ内に抽出される適数の標高上位点の新旧間距離差分に基づく評価値との線形結合値として与えられる請求項14または13記載の家屋の異動判定プログラム。
【請求項17】
前記判定に先立って、予め植生域を演算対象から除去する手順をコンピュータに実行させるための請求項10乃至16記載の家屋の異動判定プログラム。
【請求項18】
前記判定に先立って、予め移動体を演算対象から除去する手順をコンピュータに実行させるための請求項10乃至17記載の家屋の異動判定プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−3244(P2007−3244A)
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願番号】特願2005−181217(P2005−181217)
【出願日】平成17年6月21日(2005.6.21)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願日】平成17年6月21日(2005.6.21)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
[ Back to top ]