
容器の整列装置
【課題】容器が横転状態で、且つ、容器の口部等が一定の方向に向いていない状態で、一列に並んでコンベア等で搬送された容器を一定の方向に正立状態で他のコンベアに整列させて搬送する容器の整列装置に関する。
【解決手段】
容器の口部が横転状態で、その容器の口部が一定方向に向いていない状態で、一列に並んで第一搬送コンベアで搬送され、搬送された容器の口部の方向を検知して、該容器の口部の方向を一定方向にすると共に、該容器の口部を上方に向けて正立状態で第二搬送コンベアに一列に整列させて搬送する容器の整列装置であって、
前記容器の整列装置に入口ストッパー部と吸着回転部と第二搬送コンベアと吸着回転昇降部と吸着回転移動部と反転部と反転昇降部と
を具備することを特徴とする容器の整列装置。
【解決手段】
容器の口部が横転状態で、その容器の口部が一定方向に向いていない状態で、一列に並んで第一搬送コンベアで搬送され、搬送された容器の口部の方向を検知して、該容器の口部の方向を一定方向にすると共に、該容器の口部を上方に向けて正立状態で第二搬送コンベアに一列に整列させて搬送する容器の整列装置であって、
前記容器の整列装置に入口ストッパー部と吸着回転部と第二搬送コンベアと吸着回転昇降部と吸着回転移動部と反転部と反転昇降部と
を具備することを特徴とする容器の整列装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、容器が横転状態で、且つ、容器の口部等が一定の方向に向いていない状態で、一列に並んでコンベア等で搬送された容器を一定の方向に向けて正立状態で他のコンベアに整列させて搬送する容器の整列装置に関する。
【背景技術】
【0002】
口臭用薬剤やビタミン剤等の栄養剤などの固形製品、風邪薬等の医薬剤などの顆粒または紛体製品、飲料や家庭用洗剤などの液体製品は、比較的小容量の容器に小分け充填されて製品化される。
【0003】
また、固体または顆粒あるいは液体を小分け容器に充填するに際しては、先ず整列装置を用いて空容器のバルク(堆積層)から容器を順次に取出し、それぞれの容器を開口部が上向きになるように正立させ、コンベア上に整列して充填機に搬送し、充填機により所定量の収納物を充填し、次いで閉栓装置に搬送して容器の開口部に栓を施す。
【0004】
上述したように、通常、容器に収納物を充填する際には、容器の開口部が上向きになるように正立させなければならないため、従来から容器の向きを一様に整列させる処理機構や整列装置が多く考案され知られている。
【0005】
例えば、容器を整列させる時間当たりの処理ボトル数、すなわち処理効率を高めることができる物品整列装置(例えば、特許文献1参照。)が知られている。
【0006】
この物品整列装置は一つの搬出路に対し複数の搬入路と、それぞれの搬入路に設けられている不整列容器の排出機構と、到着端末部に設けられた容器開口部を上向きにして正立させる正立機とから構成されている。
【0007】
そして、さらに、すべての搬入路の到着端末部に常に物品が存在するようにそれぞれの搬入路が独立運転制御されるようにするため到着端末部に物品センサーが設けられている。
【0008】
また、プラスチックボトルを一本ずつある間隔をあけて供給するボトル整列装置(例えば、特許文献2参照。)も知られている。
【0009】
このボトル整列装置はボトル収容凹所を有し、且つ、凹所周面が低所及び高所にわたるように配置されているロータと、凹所内の低所に整列すべきボトルを供給する手段と、供給されたボトルが遠心力によって凹所周面に当接させられて、低所から高所まで移動させられるようにロータを回転させる回転手段と、凹所内の高所からボトルを排出する排出手段を備えている。
【0010】
この発明の目的は、ボトル排出手段によりコンベアにボトルを横置きして、ボトル口部を同一方向にして一列に整列させボトルの材質識別を確実にするためであるが、このボトル排出手段に正立機構を加えれば、コンベアに正立させるボトルの整列装置となる。
【0011】
さらに、上記した装置よりも単位時間当たりの容器処理数が増加し、処理効率も向上し、且つ、容器整列装置の規模を比較的大型化することなく、設備スペースを取らない、低コストで作製できる容器整列装置(例えば、特許文献3参照。)も知られている。
【0012】
この容器整列装置は傾斜している傾斜回転円盤の上から整列させたい容器を投入し、その傾斜回転円盤の外周方向へ沿って容器を傾斜上部へ移動させる。そして、そこで一旦その外周にある円環状の水平回転ガイド上に設けた容器ポケット部へそれらの容器を搭載させる。
【0013】
さらに、水平回転ガイドに複数M列の同心円上に複数N個の容器ポケットを搭載するように構成し、コンベアに複数同時に正立させて整列させる。
【0014】
また、ロボットを用いて容器を整列させる容器整列装置(例えば、特許文献3参照。)も知られている。
【0015】
この容器整列装置は、横転状態の容器を搬送する第1搬送コンベアと、この第一搬送コンベアの隣接位置に配設されて容器を搬送する第2搬送コンベアと、上記第1搬送コンベアの搬送経路に設けられ、該第1搬送コンベアが搬送する容器の載置状態を検知する検知手段と、上記検知手段の検知結果に基づいて第1搬送コンベア上から第2搬送コンベアへ容器を受け渡すロボットを備えている。
【0016】
以下に先行技術文献を示す。
【特許文献1】特開2000−159335号公報
【特許文献2】特開2002−37440号公報
【特許文献3】特開2006−143409号公報
【特許文献4】特開平6−32935号公報
【発明の開示】
【発明が解決しようとする課題】
【0017】
ところで、特許文献1の物品整列装置の構成において、単位時間当たりの処理ボトル数を向上させる場合には、搬入路を増加させる構成となるが、その増加数に少なくとも比例して排除機構、正立機構、物品センサーなど含む搬入路設備を増加させることなり、それによる設備スペース、設備コストも比例して増加する問題があった。
【0018】
また、特許文献2のボトル整列装置で、単位時間当たりの処理ボトル数を向上させる場合には、この構成のロータの回転速度を上げる必要がある。そして、回転速度はある限度で制限されるため、前記ロータの直径を大きくして処理能力を向上させる必要がある。
【0019】
しかし、装置の規模は、ロータ直径の大きさに比例するばかりではなく、さらに、強度確保の点から規模を大きくしなければならず、設備スペース、コストの両面が増加する問題があった。
【0020】
さらに、特許文献3の容器整列装置は容器の寸法(容器の高さ、外形等)等が常に同じでなければ使用できないという問題がある。
【0021】
例えば、容器の寸法異なった場合、容器ポケット部あるいは容器導通管等をはじめ、各部分を容器寸法に合わせて作製しなければならないという問題がある。そして、部材の作製、調整に時間がかかり、且つ、コストが上昇するという問題ある。
【0022】
また、ロボットを用いた特許文献4の容器整列装置は、断面円形の容器を搬送する場合
には、第1搬送コンベアを幅方向において傾斜させて容器を縦一列の横転状態で搬送するようにしている。
【0023】
このため、ロボットによる単位時間あたりの容器の受け渡し数が少なくなっている。したがって、容器整列装置の処理能力が低いという欠点がある。さらに、ロボットを用いることにより装置のコストが上昇する問題がある。
【0024】
本発明は、上記従来の問題に鑑みてなされたものであり、その課題とするところは、単位時間当たりの容器処理数を増加させ、処理効率を向上させるに際して、容器の整列装置の設置スペースが拡大することなく、安価で、且つ、容器の形状が変わっても部材等を作製したり、調整したりすることなく、容器処理能力を上げて処理することができる容器の整列装置を提供することである。
【課題を解決するための手段】
【0025】
上記問題点を解決するために、本発明の請求項1に係る発明は、
容器の口部が横転状態で、その容器の口部が一定方向に向いていない状態で、一列に並んで第一搬送コンベアで搬送され、搬送された容器の口部の方向を検知して、該容器の口部の方向を一定方向にすると共に、該容器の口部を上方に向けて正立状態で第二搬送コンベアに一列に整列させて搬送する容器の整列装置であって、
前記第一搬送コンベアに横転状態で、連続搬送されてくる容器を、第一搬送コンベアの先端に設けた容器先端検知センサーからの信号によって容器の搬送を停止または搬送させる入口ストッパー部と、
前記入口ストッパー部の先端方向の、第一搬送コンベアの外側方向左右に第一搬送コンベアに横転状態で搬送された容器の口部の方向を検知する複数の検知部と、
前記検知部の第一搬送コンベアの上方方向に前記検知部で検知した容器を降下した吸着盤で吸着し、上昇しながら検知信号により吸着している容器を回して容器の口部の方向を一定方向に向ける複数の吸着回転部と、
前記第一搬送コンベアの先端方向の右側方向に搬送方向が第一搬送コンベアと同じ方向、並列に搬送する第二搬送コンベアと、
前記第二搬送コンベアと並列に搬送する第一搬送コンベアの中間位置に複数の吸着回転部を昇降させる吸着回転昇降部と、
前記吸着回転昇降部の上方方向に前記複数の吸着回転部に吸着されている容器を第二搬送コンベアと第一搬送コンベアの中間位置まで水平に往復移動する吸着回転移動部と、
前記第二搬送コンベアの上方方向に前記複数の吸着回転部の吸着盤で吸着されている容器の下方側面を吸着して複数の容器を受け渡し、受け渡された複数の容器の口部を上方に向けて正立状態に反転する反転部と、
前記第二搬送コンベアの搬送方向右側の外側方向に反転部に吸着されている複数の容器の口部を、上方に向けて正立状態で、整列して第二搬送コンベアの上方方向から載置するための反転昇降部と
を具備することを特徴とする容器の整列装置である。
【0026】
次に、本発明の請求項2に係る発明は、
前記検知部は光の透過の違いによって容器の口部の向きを検知することを特徴とする請求項1記載の容器の整列装置である。
【発明の効果】
【0027】
本発明の容器の整列装置は以上の構成からなるので、前工程から横転状態で搬送されてくる容器が一定方向に向いていない状態でも容易に、且つ、正確に正立状態で整列させることができる。
【0028】
また、本発明の容器の整列装置は従来のドラムタイプの円形型の装置とことなり、設備スペースを抑制することができる。そして、安価に装置を作製することができる。
【0029】
また、単位時間当たりの処理能力を上げる場合でも、装置の設置スペースを広くすることなく現状の設置スペースで、容易に処理能力を上げることができる。
【0030】
さらに、容器の形状等が変わっても、新たに装置の部品等を作製したり、作製した部品等を取り付け、調整等することがない。そして、効率良く容器の処理作業をすることができる。
【0031】
また、本発明の容器の整列装置はロボット等の高額で煩雑な装置を用いることなく単純な構造と機構で装置を作製できる。そして、安価であるだけでなく故障が少なく、保守が容易である。
【0032】
さらに、本発明の容器の整列装置は上述したように従来のドラムタイプの円形型装置のように、容器がドラム内で攪拌状態に回されることがないので容器に傷等が付きにくい。そして、容器の搬送は通常のベルトコンベアで、容器に傷等が付くことなく一列で搬送される。
【発明を実施するための最良の形態】
【0033】
本発明の容器の整列装置を実施の形態に沿って以下に図面を参照にしながら詳細に説明する。
【0034】
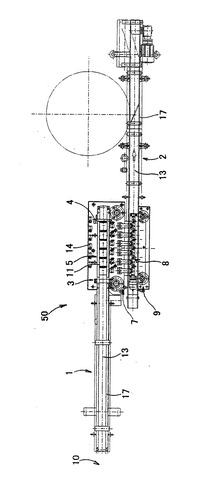
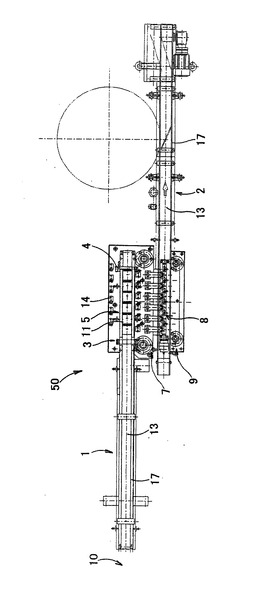
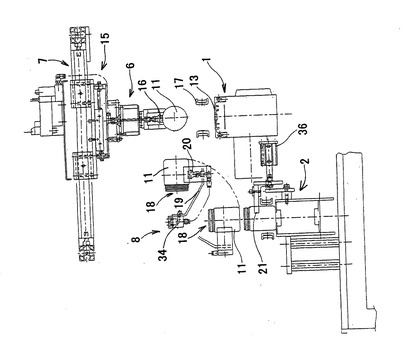
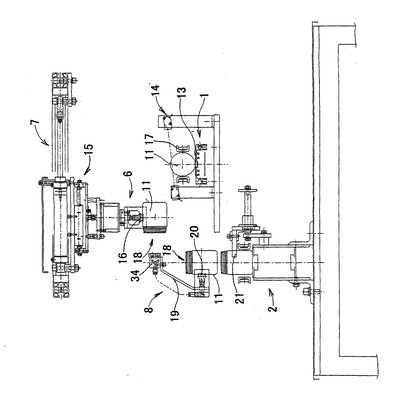
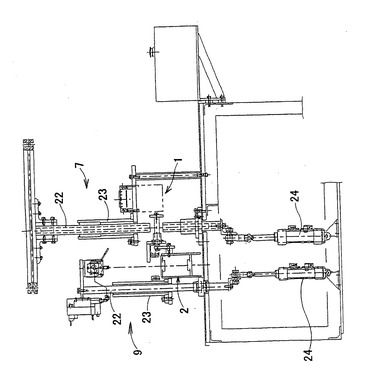
図1は本発明の容器の整列装置の一実施例の平面の概略を示す概略図である。また、図2は本発明の容器の整列装置の一実施例の正面の概略を示す概略図である。
【0035】
図1または図2に示すように、本発明の容器の整列装置は前工程10から容器が横転状態で、且つ、容器の口部が一定方向を向いていない状態で搬送載置する第一コンベア1と、該第一コンベア1の搬送方向の先端方向に入口ストッパー部3と検知部5が設けられている。そして、第一コンベア1の上方方向に複数の吸着回転部6と吸着回転部6を水平移動させる吸着回転移動部(図に示していない)と吸着回転昇降部7が設けられている。
【0036】
さらに、第一コンベア1の搬送方向に容器の口部を上方に向けて正立状態で次工程に搬送すると第二コンベア2と、その第二コンベア2の上方方向に反転部8と反転昇降部9等から形成されている。そして、第二コンベア2は第一コンベア1の搬送方向の先端方向で並列に設けられている。
【0037】
前記第一コンベア1は前工程10から上述したように容器11を横転した状態で、且つ、容器11の口部が一定方向に向いていない状態で走行するベルトコンベア13で搬送される。前記ベルトコンベアの走行は駆動モータ12によってなされる。
【0038】
また、第一コンベア1の搬送方向の先端方向設けられている入口ストッパー部3はベルトコンベア13に載置搬送されてきた容器11を停止し、再び、搬送を開始させるために設けられている。
【0039】
前記入口ストッパー部3の停止および搬送再開は第一コンベア1の搬送方向先端に設けられている容器先端検知センサー4からの検知信号によって成される。該容器先端検知センサー4は第一コンベア1の先端の、外側の左右上に設けられている。
【0040】
また、第一コンベア1に載置された容器11が検知部5で検知され、吸着回転部5で容
器が吸着される。また、吸着回転昇降部7によって吸着された容器が上昇するまえに前記入口ストッパー部3が容器の外側面(胴部)を押さえられる。そして、容器が上昇すると容器の外側面(胴部)を押さえられて停止していた容器11が先端方向に搬送される。
【0041】
前記検知部5は入口ストッパー部3と容器先端検知センサー4の間の、第一コンベア1上の外側左右に複数の方向検知センサー14が設けられている。そして、複数の方向検知センサー14が設けられている検知部5に容器が搬送された状態になると、検知部5方向に搬送されている容器が入口ストッパー部3で停止される。
【0042】
方向検知センサー14をより多く設けることにより単位時間当たりの処理能力を設置スペース広くすることなく上げることができる。そして、当然ながら、吸着回転部5と反転部8は方向検知センサー14と同じ数の吸着回転部5と反転部8となる。
【0043】
また、前記吸着回転部6は検知部5の第一コンベア1の上方方向に上述したように検知部5の複数の方向検知センサー14と同じ数の吸着回転部5が設けられている。そして、複数の吸着回転部5は吸着回転昇降部7を水平方向に往復移動する吸着回転移動部に接合されている。
【0044】
また、吸着回転昇降部7の昇降駆動は検知部5が設けられている、第一コンベア1の搬送方向右側方向の第二コンベア2との中間に設けられている。そして、上述したように吸着回転昇降部7の上方方向に複数の吸着回転部6を第一コンベア1と第二コンベア2との略中央位置に移動させる吸着回転移動部15が設けられている。
【0045】
さらに、吸着回転移動部で第一コンベア1と第二コンベア2との略中央位置に移動された複数の吸着回転部5の移動し前方方向に複数の反転部8が設けられている。そして、反転部は反転昇降部9の上方方向で接合されている。
【0046】
前記反転昇降部9は第二コンベア2が搬送する方向の右側の外側方向に設けられている。そして、反転昇降部9は反転昇降部9の上方方向に接合されている反転部8が正立状態で、口部を上方に向けた状態で吸着している容器を降下させて第二コンベア2のベルトコンベアに載置する。
【0047】
また、本発明の容器の整列装置が使用される容器の形状は角形、長方形形、丸形の断面形状等あってもよい。
【0048】
また、容器の材質はガラス、アルミニウム、樹脂等の容器であってもよいが好ましくは熱樹脂可塑性樹脂、例えば、低密度ポリエチレン樹脂(LDPE)、中密度ポリエチレン樹脂(MDPE)、高密度ポリエチレン樹脂(HDPE)、直鎖状低密度ポリエチレン樹脂(L−LDPE)、ポリプロピレン樹脂(PP)、エチレン−プロピレン共重合体(EP)、エチレン−αオレフィン共重合体、エチレン−アクリル酸共重合体(EAA)、エチレン−メタクリル酸共重合体(EMAA)、エチレン−メタクリル酸エステル共重合体、エチレン−アクリル酸エステル共重合体、アイオノマー樹脂、エチレン−酢酸ビニル共重合体(EVA)などの樹脂が好ましい。
【0049】
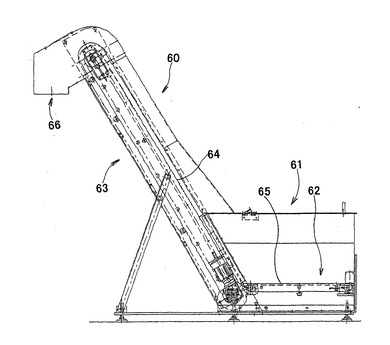
また、本発明の容器の整列装置の第一コンベア1に載置される容器の前工程には、一般的に、成形された容器を供給する容器供給機と容器ホッパーとソーター等の装置が用いられている。そして、容器ホッパー60は図13に示すようにホッパー61の底方向にコンベアベルト62を設け、リフト部63に設けられている仕切り付ベルト64に容器11を載置するため、前記コンベアベルト62のベルト65が仕切り付ベルト64方向に走行している。
【0050】
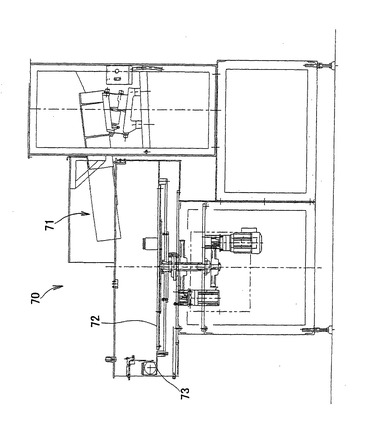
さらに、前記リフト部の上方先端のシュータ66から排出された容器11は図12に示すようなシュート71と内円板72と外円板73等を有するソーター70の外円板73から横転した状態で容器11が排出される。そして、容器11は第一コンベア1に横転状態で、且つ、容器11の口部の方向が一定の方向に向いていない状態で載置される。
【0051】
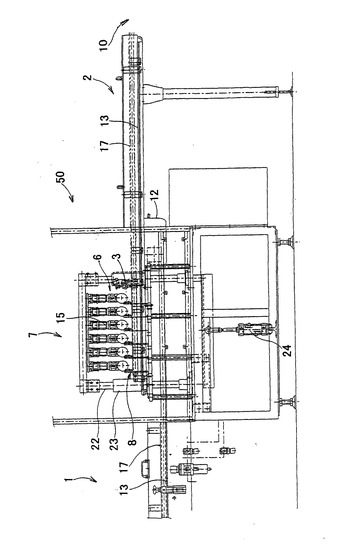
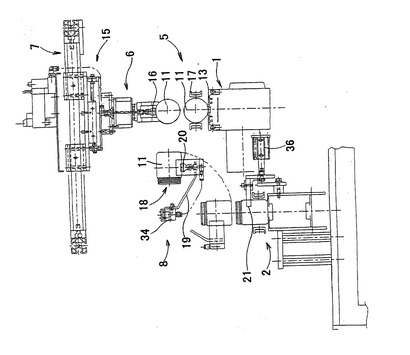
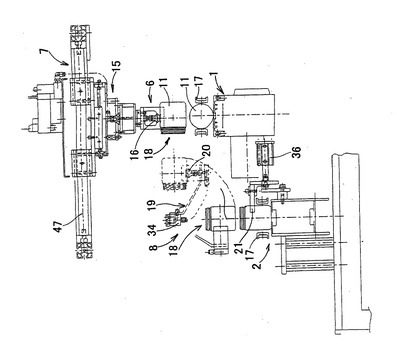
次に、図3は本発明の容器の整列装置で容器を整列する状態を説明する説明図である。また、図4〜図7は本発明の容器の整列装置で容器を整列する状態を説明する他の説明図である。
【0052】
本発明の容器の整列装置50は前工程10から横転状態で、且つ、容器11の口部18の方向が一定方向に向いていない状態で第一コンベア1のベルトコンベア13上に載置され、コンベアガイド17等に容器11の側面をガイドされて検知部5に搬送される。
【0053】
そして、検知部5に搬送され容器11は、容器11の上方方向に設けられている吸着回転部6と吸着回転移動部15が降下して吸着回転部6の下方方向先端に設けられているバキュームパット16に容器11の側面(胴部)の略中央位置が吸着される。(図3に示す)。
【0054】
吸着回転部6で吸着された容器11は図4に示すようにベルトコンベア13の上方方向に上昇する。そして、容器11は上昇すると共に、図7に示す検知部5の方向検知センサー14で検知した検知信号により容器11の口部の方向が一定方向に向くように吸着回転部6に設けられている電動ロータリーアクチュエータ26が回転駆動して容器11の口部18が図6に示すように一定方向に揃えられる。
【0055】
また、容器11が上昇すると第一コンベア1の搬送方向先端に設けられている容器先端検知センサー4が容器11を無くなったことを検知する。そして、検知した検知信号によって、検知部5の入口に設けられている入口ストッパー部3が開口し、図5に示すように第一コンベア1で搬送されてきた容器が検知部5に搬送される。さらに、検知部5に搬送された容器を容器先端検知センサー4が検知すると入口ストッパー部3が閉口して容器を停止させる。
【0056】
前記容器11の口部18が図6に示すように一定方向に揃えられたあと、吸着回転部6が接合されている吸着回転移動部15が吸着回転昇降部9の前方方向に移動し、停止する。そして、吸着回転部6で吸着されて停止している容器の側面(胴部)の下方が反転部8のカップブラケット19の先端に設けられているバキュームパット20に吸着される。
【0057】
さらに、反転部8のバキュームパット20で吸着した容器11は反転部8の反転シャフト34が90度回転駆動して、第二コンベア2の上方方向に容器11の口部18を上方方向に向けられる。そして、反転部8が接合されている反転昇降部9が降下して第二コンベア2のベルトコンベア13に容器11が載置される。
【0058】
前記反転昇降部9が降下する際には、第二コンベア2の上方方向に載置案内ガイド21が形成される。この載置案内ガイド21は容器11がベルトコンベア13に載置する際に転倒するのを防止するため形成される。
【0059】
また、容器11が完全にベルトコンベア13に載置された後、載置案内ガイド21は第一コンベア1方向に移動する。そして、ベルトコンベア13に載置された容器11は口部18を上方方向に向けて次工程に搬送される。
【0060】
前記次工程としては容器洗浄工程、容器殺菌工程、充填工程、開口部密封工程、充填物殺菌工程、ラベル貼り工程等がある充填する充填物あるいは保存方法、流通方法、流通条件等によって適宜選択される。
【0061】
次に、図8は本発明の容器の整列装置50の吸着回転昇降部と反転昇降部を説明するための説明図である。
【0062】
図8に示すように吸着回転昇降部7と反転昇降部9は昇降すめためスライドシャフト22とスライドシャフト受け23と駆動シリンダ24等から形成されている。そして、スライドシャフト22の昇降駆動はエアーシリンダまたは油圧シリンダ等の駆動シリンダ24を用いることができるが、特に限定するものではない。例えば、カム、エキセントリツク等の機械構造によりスライドシャフトを上昇、降下させても良い。
【0063】
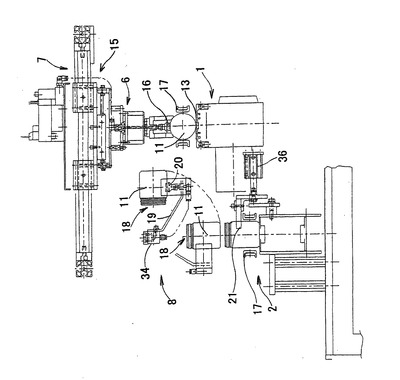
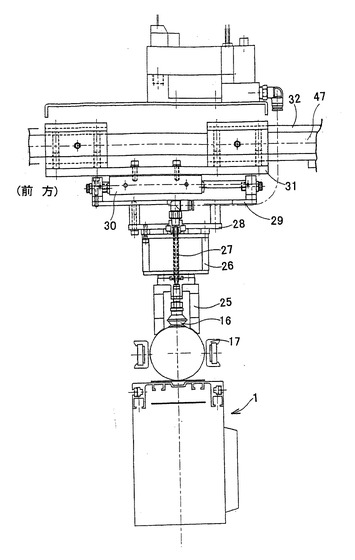
次に、図9は本発明の容器の整列装置50の吸着回転部6と吸着回転移動部15と吸着回転昇降部7を説明するための説明図である。
【0064】
図9に示すように吸着回転部6はコンベア上に載置されている容器11の側面(胴部)の上方を吸着するバキュームパット16とバキュームカップ25とバキュームパイプ27と電動ロータリーアクチュエータ26とアクチュエータベース28等から形成されている。そして、前記アクチュエータベース28が吸着回転移動部15のシリンダーベース29と接合されている。
【0065】
また、吸着回転移動部15はシリンダーベース29とスライドシリンダー30とスライドベース31等で形成されている。そして、スライドベース31が吸着回転昇降部7のスライドシャフト22上を移動する。
【0066】
また、吸着回転昇降部7は横スライドシャフト47とベースフレーム32とシャフトブロック(図に示していない)と図8に示すスライドシャフト22とスライドシャフト受け23と駆動シリンダ24等から形成されている。そして、横スライドシャフト47はベースフレーム32の両先端で図には示していないが係着されている。
【0067】
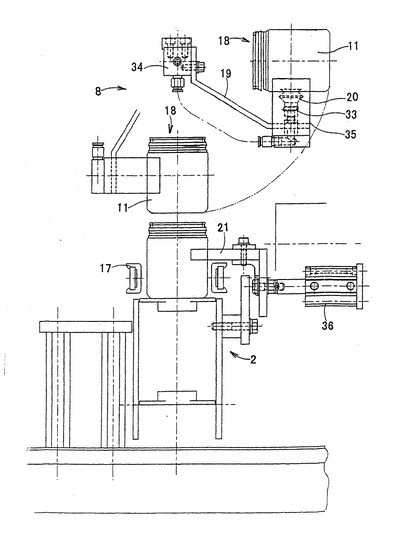
次に、図10は本発明の容器の整列装置50の反転部8を説明するための説明図である。
【0068】
図9に示すように本発明の容器の整列装置50の反転部8は反転シャフト34とカップブラケット19とバキュームパット20とパットアダプタ33とバキュームカップ35と載置案内ガイド21と載置案内ガイド駆動用シリンダ36等から形成されている。
【0069】
前記載置案内ガイド駆動シリンダ36はエアーシリンダまたは油圧シリンダ等の駆動用シリンダを用いることができるが、特に限定するものではない。例えば、カム、エキセントリツク等の機械構造により載置案内ガイドを前後に駆動させてもよい。
【0070】
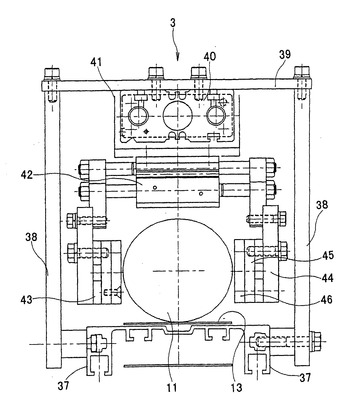
次に、図11は本発明の容器の整列装置50の入口ストッパー部3を説明するための説明図である。
【0071】
本発明の容器の整列装置50の入口ストッパー部3は図11に示すように第一コンベアの、フレーム37の外側面の両側面に接合されているストッパー取付台横板38とストッパー渡し板39とガイド付きシリンダ40とシリンダブラケット41とワイド形エア−ハンド42とホルダーライナー43とストッパーホルダープレート45とホルダーラバー46等から形成されている
そして、容器の側面(胴部)の略中央位置をストップホルダープレートの外側面にゴム、スポンジ等の弾性樹脂からなるホルダーラバーで押さえ、コンベアベルトで搬送されている容器が停止する。また容器を押さえるホルダーラバーは上述したようにゴム、スポンジ等の弾性樹脂からなるので容器に傷等を付けることがない。
【産業上の利用可能性】
【0072】
本発明の容器の整列装置50は容器の口部等が一定の方向に向いていない状態で搬送されてきても素早い速度で、容器に傷をつけることなく、且つ、設備スペースを取らず容器の方向を一定方向に向けられる整列装置として優れていることはもとより医薬分野や食品分野あるいは精密機械分野等の生産ライン等にも使用できる素晴らしい発明である。
【図面の簡単な説明】
【0073】
【図1】本発明の容器の整列装置の一実施例の平面の概略を示す概略図である。
【図2】本発明の容器の整列装置の一実施例の正面の概略を示す概略図である。
【図3】本発明の容器の整列装置で容器を整列する状態を説明する説明図である。
【図4】本発明の容器の整列装置で容器を整列する状態を説明する他の説明図である。
【図5】本発明の容器の整列装置で容器を整列する状態を説明するまた他の説明図である。
【図6】本発明の容器の整列装置で容器を整列する状態を説明するさらに他の説明図である。
【図7】本発明の容器の整列装置で容器を整列する状態を説明するまたさらに他の説明図である。
【図8】本発明の容器の整列装置50の吸着回転昇降部と反転昇降部を説明するための説明図である。
【図9】本発明の容器の整列装置50の吸着回転部6と吸着回転移動部15と吸着回転昇降部7を説明するための説明図である。
【図10】本発明の容器の整列装置50の反転部8を説明するための説明図である。
【図11】本発明の容器の整列装置50の入口ストッパー部3を説明するための説明図である。
【図12】本発明の容器の整列装置50の前工程に用いられる装置の概略を説明する概略図である。
【図13】本発明の容器の整列装置50の前工程に用いられる装置の概略を説明する他の概略図である。
【符号の説明】
【0074】
1…第一コンベア
2…第二コンベア
3…入口ストッパー部
4…容器先端検知センサー
5…検知部
6…吸着回転部
7…吸着回転昇降部
8…反転部
9…反転昇降部
10…前工程
11…容器
12…ベルトコンベア駆動モータ
13…ベルトコンベア
14…方向検知センサー
15…吸着回転移動部
16…バキュームパット
17…コンベアガイド
18…口部
19…カップブラケット
20…バキュームパット
21…載置案内ガイド
22…スライドシャフト
23…スライドシャフト受け
24…駆動シリンダ
25…バキュームカップ
26…電動ロータリーアクチュエータ
27…バキュームパイプ
28…アクチュエータベース
29…シリンダーベース
30…スライドシリンダー
31…スライドベース
32…ベースフレーム
33…パットアダプタ
34…反転シャフト
35…バキュームカップ
36…載置案内ガイド駆動用シリンダ
37…第一コンベアのフレーム
38…ストッパー取り付け台
39…ストッパー渡し板
40…ガイド付きシリンダ
41…シリンダブラケット
42…ワイド形エアーバンド
43…ホルダーライナー
44…ホルダーブラケット
45…ストッパーホルダープレート
46…ホルダーラバー
47…横スライドシャフト
50…本発明の容器の整列装置
60…容器ホッパー
70…ソーター
【技術分野】
【0001】
本発明は、容器が横転状態で、且つ、容器の口部等が一定の方向に向いていない状態で、一列に並んでコンベア等で搬送された容器を一定の方向に向けて正立状態で他のコンベアに整列させて搬送する容器の整列装置に関する。
【背景技術】
【0002】
口臭用薬剤やビタミン剤等の栄養剤などの固形製品、風邪薬等の医薬剤などの顆粒または紛体製品、飲料や家庭用洗剤などの液体製品は、比較的小容量の容器に小分け充填されて製品化される。
【0003】
また、固体または顆粒あるいは液体を小分け容器に充填するに際しては、先ず整列装置を用いて空容器のバルク(堆積層)から容器を順次に取出し、それぞれの容器を開口部が上向きになるように正立させ、コンベア上に整列して充填機に搬送し、充填機により所定量の収納物を充填し、次いで閉栓装置に搬送して容器の開口部に栓を施す。
【0004】
上述したように、通常、容器に収納物を充填する際には、容器の開口部が上向きになるように正立させなければならないため、従来から容器の向きを一様に整列させる処理機構や整列装置が多く考案され知られている。
【0005】
例えば、容器を整列させる時間当たりの処理ボトル数、すなわち処理効率を高めることができる物品整列装置(例えば、特許文献1参照。)が知られている。
【0006】
この物品整列装置は一つの搬出路に対し複数の搬入路と、それぞれの搬入路に設けられている不整列容器の排出機構と、到着端末部に設けられた容器開口部を上向きにして正立させる正立機とから構成されている。
【0007】
そして、さらに、すべての搬入路の到着端末部に常に物品が存在するようにそれぞれの搬入路が独立運転制御されるようにするため到着端末部に物品センサーが設けられている。
【0008】
また、プラスチックボトルを一本ずつある間隔をあけて供給するボトル整列装置(例えば、特許文献2参照。)も知られている。
【0009】
このボトル整列装置はボトル収容凹所を有し、且つ、凹所周面が低所及び高所にわたるように配置されているロータと、凹所内の低所に整列すべきボトルを供給する手段と、供給されたボトルが遠心力によって凹所周面に当接させられて、低所から高所まで移動させられるようにロータを回転させる回転手段と、凹所内の高所からボトルを排出する排出手段を備えている。
【0010】
この発明の目的は、ボトル排出手段によりコンベアにボトルを横置きして、ボトル口部を同一方向にして一列に整列させボトルの材質識別を確実にするためであるが、このボトル排出手段に正立機構を加えれば、コンベアに正立させるボトルの整列装置となる。
【0011】
さらに、上記した装置よりも単位時間当たりの容器処理数が増加し、処理効率も向上し、且つ、容器整列装置の規模を比較的大型化することなく、設備スペースを取らない、低コストで作製できる容器整列装置(例えば、特許文献3参照。)も知られている。
【0012】
この容器整列装置は傾斜している傾斜回転円盤の上から整列させたい容器を投入し、その傾斜回転円盤の外周方向へ沿って容器を傾斜上部へ移動させる。そして、そこで一旦その外周にある円環状の水平回転ガイド上に設けた容器ポケット部へそれらの容器を搭載させる。
【0013】
さらに、水平回転ガイドに複数M列の同心円上に複数N個の容器ポケットを搭載するように構成し、コンベアに複数同時に正立させて整列させる。
【0014】
また、ロボットを用いて容器を整列させる容器整列装置(例えば、特許文献3参照。)も知られている。
【0015】
この容器整列装置は、横転状態の容器を搬送する第1搬送コンベアと、この第一搬送コンベアの隣接位置に配設されて容器を搬送する第2搬送コンベアと、上記第1搬送コンベアの搬送経路に設けられ、該第1搬送コンベアが搬送する容器の載置状態を検知する検知手段と、上記検知手段の検知結果に基づいて第1搬送コンベア上から第2搬送コンベアへ容器を受け渡すロボットを備えている。
【0016】
以下に先行技術文献を示す。
【特許文献1】特開2000−159335号公報
【特許文献2】特開2002−37440号公報
【特許文献3】特開2006−143409号公報
【特許文献4】特開平6−32935号公報
【発明の開示】
【発明が解決しようとする課題】
【0017】
ところで、特許文献1の物品整列装置の構成において、単位時間当たりの処理ボトル数を向上させる場合には、搬入路を増加させる構成となるが、その増加数に少なくとも比例して排除機構、正立機構、物品センサーなど含む搬入路設備を増加させることなり、それによる設備スペース、設備コストも比例して増加する問題があった。
【0018】
また、特許文献2のボトル整列装置で、単位時間当たりの処理ボトル数を向上させる場合には、この構成のロータの回転速度を上げる必要がある。そして、回転速度はある限度で制限されるため、前記ロータの直径を大きくして処理能力を向上させる必要がある。
【0019】
しかし、装置の規模は、ロータ直径の大きさに比例するばかりではなく、さらに、強度確保の点から規模を大きくしなければならず、設備スペース、コストの両面が増加する問題があった。
【0020】
さらに、特許文献3の容器整列装置は容器の寸法(容器の高さ、外形等)等が常に同じでなければ使用できないという問題がある。
【0021】
例えば、容器の寸法異なった場合、容器ポケット部あるいは容器導通管等をはじめ、各部分を容器寸法に合わせて作製しなければならないという問題がある。そして、部材の作製、調整に時間がかかり、且つ、コストが上昇するという問題ある。
【0022】
また、ロボットを用いた特許文献4の容器整列装置は、断面円形の容器を搬送する場合
には、第1搬送コンベアを幅方向において傾斜させて容器を縦一列の横転状態で搬送するようにしている。
【0023】
このため、ロボットによる単位時間あたりの容器の受け渡し数が少なくなっている。したがって、容器整列装置の処理能力が低いという欠点がある。さらに、ロボットを用いることにより装置のコストが上昇する問題がある。
【0024】
本発明は、上記従来の問題に鑑みてなされたものであり、その課題とするところは、単位時間当たりの容器処理数を増加させ、処理効率を向上させるに際して、容器の整列装置の設置スペースが拡大することなく、安価で、且つ、容器の形状が変わっても部材等を作製したり、調整したりすることなく、容器処理能力を上げて処理することができる容器の整列装置を提供することである。
【課題を解決するための手段】
【0025】
上記問題点を解決するために、本発明の請求項1に係る発明は、
容器の口部が横転状態で、その容器の口部が一定方向に向いていない状態で、一列に並んで第一搬送コンベアで搬送され、搬送された容器の口部の方向を検知して、該容器の口部の方向を一定方向にすると共に、該容器の口部を上方に向けて正立状態で第二搬送コンベアに一列に整列させて搬送する容器の整列装置であって、
前記第一搬送コンベアに横転状態で、連続搬送されてくる容器を、第一搬送コンベアの先端に設けた容器先端検知センサーからの信号によって容器の搬送を停止または搬送させる入口ストッパー部と、
前記入口ストッパー部の先端方向の、第一搬送コンベアの外側方向左右に第一搬送コンベアに横転状態で搬送された容器の口部の方向を検知する複数の検知部と、
前記検知部の第一搬送コンベアの上方方向に前記検知部で検知した容器を降下した吸着盤で吸着し、上昇しながら検知信号により吸着している容器を回して容器の口部の方向を一定方向に向ける複数の吸着回転部と、
前記第一搬送コンベアの先端方向の右側方向に搬送方向が第一搬送コンベアと同じ方向、並列に搬送する第二搬送コンベアと、
前記第二搬送コンベアと並列に搬送する第一搬送コンベアの中間位置に複数の吸着回転部を昇降させる吸着回転昇降部と、
前記吸着回転昇降部の上方方向に前記複数の吸着回転部に吸着されている容器を第二搬送コンベアと第一搬送コンベアの中間位置まで水平に往復移動する吸着回転移動部と、
前記第二搬送コンベアの上方方向に前記複数の吸着回転部の吸着盤で吸着されている容器の下方側面を吸着して複数の容器を受け渡し、受け渡された複数の容器の口部を上方に向けて正立状態に反転する反転部と、
前記第二搬送コンベアの搬送方向右側の外側方向に反転部に吸着されている複数の容器の口部を、上方に向けて正立状態で、整列して第二搬送コンベアの上方方向から載置するための反転昇降部と
を具備することを特徴とする容器の整列装置である。
【0026】
次に、本発明の請求項2に係る発明は、
前記検知部は光の透過の違いによって容器の口部の向きを検知することを特徴とする請求項1記載の容器の整列装置である。
【発明の効果】
【0027】
本発明の容器の整列装置は以上の構成からなるので、前工程から横転状態で搬送されてくる容器が一定方向に向いていない状態でも容易に、且つ、正確に正立状態で整列させることができる。
【0028】
また、本発明の容器の整列装置は従来のドラムタイプの円形型の装置とことなり、設備スペースを抑制することができる。そして、安価に装置を作製することができる。
【0029】
また、単位時間当たりの処理能力を上げる場合でも、装置の設置スペースを広くすることなく現状の設置スペースで、容易に処理能力を上げることができる。
【0030】
さらに、容器の形状等が変わっても、新たに装置の部品等を作製したり、作製した部品等を取り付け、調整等することがない。そして、効率良く容器の処理作業をすることができる。
【0031】
また、本発明の容器の整列装置はロボット等の高額で煩雑な装置を用いることなく単純な構造と機構で装置を作製できる。そして、安価であるだけでなく故障が少なく、保守が容易である。
【0032】
さらに、本発明の容器の整列装置は上述したように従来のドラムタイプの円形型装置のように、容器がドラム内で攪拌状態に回されることがないので容器に傷等が付きにくい。そして、容器の搬送は通常のベルトコンベアで、容器に傷等が付くことなく一列で搬送される。
【発明を実施するための最良の形態】
【0033】
本発明の容器の整列装置を実施の形態に沿って以下に図面を参照にしながら詳細に説明する。
【0034】
図1は本発明の容器の整列装置の一実施例の平面の概略を示す概略図である。また、図2は本発明の容器の整列装置の一実施例の正面の概略を示す概略図である。
【0035】
図1または図2に示すように、本発明の容器の整列装置は前工程10から容器が横転状態で、且つ、容器の口部が一定方向を向いていない状態で搬送載置する第一コンベア1と、該第一コンベア1の搬送方向の先端方向に入口ストッパー部3と検知部5が設けられている。そして、第一コンベア1の上方方向に複数の吸着回転部6と吸着回転部6を水平移動させる吸着回転移動部(図に示していない)と吸着回転昇降部7が設けられている。
【0036】
さらに、第一コンベア1の搬送方向に容器の口部を上方に向けて正立状態で次工程に搬送すると第二コンベア2と、その第二コンベア2の上方方向に反転部8と反転昇降部9等から形成されている。そして、第二コンベア2は第一コンベア1の搬送方向の先端方向で並列に設けられている。
【0037】
前記第一コンベア1は前工程10から上述したように容器11を横転した状態で、且つ、容器11の口部が一定方向に向いていない状態で走行するベルトコンベア13で搬送される。前記ベルトコンベアの走行は駆動モータ12によってなされる。
【0038】
また、第一コンベア1の搬送方向の先端方向設けられている入口ストッパー部3はベルトコンベア13に載置搬送されてきた容器11を停止し、再び、搬送を開始させるために設けられている。
【0039】
前記入口ストッパー部3の停止および搬送再開は第一コンベア1の搬送方向先端に設けられている容器先端検知センサー4からの検知信号によって成される。該容器先端検知センサー4は第一コンベア1の先端の、外側の左右上に設けられている。
【0040】
また、第一コンベア1に載置された容器11が検知部5で検知され、吸着回転部5で容
器が吸着される。また、吸着回転昇降部7によって吸着された容器が上昇するまえに前記入口ストッパー部3が容器の外側面(胴部)を押さえられる。そして、容器が上昇すると容器の外側面(胴部)を押さえられて停止していた容器11が先端方向に搬送される。
【0041】
前記検知部5は入口ストッパー部3と容器先端検知センサー4の間の、第一コンベア1上の外側左右に複数の方向検知センサー14が設けられている。そして、複数の方向検知センサー14が設けられている検知部5に容器が搬送された状態になると、検知部5方向に搬送されている容器が入口ストッパー部3で停止される。
【0042】
方向検知センサー14をより多く設けることにより単位時間当たりの処理能力を設置スペース広くすることなく上げることができる。そして、当然ながら、吸着回転部5と反転部8は方向検知センサー14と同じ数の吸着回転部5と反転部8となる。
【0043】
また、前記吸着回転部6は検知部5の第一コンベア1の上方方向に上述したように検知部5の複数の方向検知センサー14と同じ数の吸着回転部5が設けられている。そして、複数の吸着回転部5は吸着回転昇降部7を水平方向に往復移動する吸着回転移動部に接合されている。
【0044】
また、吸着回転昇降部7の昇降駆動は検知部5が設けられている、第一コンベア1の搬送方向右側方向の第二コンベア2との中間に設けられている。そして、上述したように吸着回転昇降部7の上方方向に複数の吸着回転部6を第一コンベア1と第二コンベア2との略中央位置に移動させる吸着回転移動部15が設けられている。
【0045】
さらに、吸着回転移動部で第一コンベア1と第二コンベア2との略中央位置に移動された複数の吸着回転部5の移動し前方方向に複数の反転部8が設けられている。そして、反転部は反転昇降部9の上方方向で接合されている。
【0046】
前記反転昇降部9は第二コンベア2が搬送する方向の右側の外側方向に設けられている。そして、反転昇降部9は反転昇降部9の上方方向に接合されている反転部8が正立状態で、口部を上方に向けた状態で吸着している容器を降下させて第二コンベア2のベルトコンベアに載置する。
【0047】
また、本発明の容器の整列装置が使用される容器の形状は角形、長方形形、丸形の断面形状等あってもよい。
【0048】
また、容器の材質はガラス、アルミニウム、樹脂等の容器であってもよいが好ましくは熱樹脂可塑性樹脂、例えば、低密度ポリエチレン樹脂(LDPE)、中密度ポリエチレン樹脂(MDPE)、高密度ポリエチレン樹脂(HDPE)、直鎖状低密度ポリエチレン樹脂(L−LDPE)、ポリプロピレン樹脂(PP)、エチレン−プロピレン共重合体(EP)、エチレン−αオレフィン共重合体、エチレン−アクリル酸共重合体(EAA)、エチレン−メタクリル酸共重合体(EMAA)、エチレン−メタクリル酸エステル共重合体、エチレン−アクリル酸エステル共重合体、アイオノマー樹脂、エチレン−酢酸ビニル共重合体(EVA)などの樹脂が好ましい。
【0049】
また、本発明の容器の整列装置の第一コンベア1に載置される容器の前工程には、一般的に、成形された容器を供給する容器供給機と容器ホッパーとソーター等の装置が用いられている。そして、容器ホッパー60は図13に示すようにホッパー61の底方向にコンベアベルト62を設け、リフト部63に設けられている仕切り付ベルト64に容器11を載置するため、前記コンベアベルト62のベルト65が仕切り付ベルト64方向に走行している。
【0050】
さらに、前記リフト部の上方先端のシュータ66から排出された容器11は図12に示すようなシュート71と内円板72と外円板73等を有するソーター70の外円板73から横転した状態で容器11が排出される。そして、容器11は第一コンベア1に横転状態で、且つ、容器11の口部の方向が一定の方向に向いていない状態で載置される。
【0051】
次に、図3は本発明の容器の整列装置で容器を整列する状態を説明する説明図である。また、図4〜図7は本発明の容器の整列装置で容器を整列する状態を説明する他の説明図である。
【0052】
本発明の容器の整列装置50は前工程10から横転状態で、且つ、容器11の口部18の方向が一定方向に向いていない状態で第一コンベア1のベルトコンベア13上に載置され、コンベアガイド17等に容器11の側面をガイドされて検知部5に搬送される。
【0053】
そして、検知部5に搬送され容器11は、容器11の上方方向に設けられている吸着回転部6と吸着回転移動部15が降下して吸着回転部6の下方方向先端に設けられているバキュームパット16に容器11の側面(胴部)の略中央位置が吸着される。(図3に示す)。
【0054】
吸着回転部6で吸着された容器11は図4に示すようにベルトコンベア13の上方方向に上昇する。そして、容器11は上昇すると共に、図7に示す検知部5の方向検知センサー14で検知した検知信号により容器11の口部の方向が一定方向に向くように吸着回転部6に設けられている電動ロータリーアクチュエータ26が回転駆動して容器11の口部18が図6に示すように一定方向に揃えられる。
【0055】
また、容器11が上昇すると第一コンベア1の搬送方向先端に設けられている容器先端検知センサー4が容器11を無くなったことを検知する。そして、検知した検知信号によって、検知部5の入口に設けられている入口ストッパー部3が開口し、図5に示すように第一コンベア1で搬送されてきた容器が検知部5に搬送される。さらに、検知部5に搬送された容器を容器先端検知センサー4が検知すると入口ストッパー部3が閉口して容器を停止させる。
【0056】
前記容器11の口部18が図6に示すように一定方向に揃えられたあと、吸着回転部6が接合されている吸着回転移動部15が吸着回転昇降部9の前方方向に移動し、停止する。そして、吸着回転部6で吸着されて停止している容器の側面(胴部)の下方が反転部8のカップブラケット19の先端に設けられているバキュームパット20に吸着される。
【0057】
さらに、反転部8のバキュームパット20で吸着した容器11は反転部8の反転シャフト34が90度回転駆動して、第二コンベア2の上方方向に容器11の口部18を上方方向に向けられる。そして、反転部8が接合されている反転昇降部9が降下して第二コンベア2のベルトコンベア13に容器11が載置される。
【0058】
前記反転昇降部9が降下する際には、第二コンベア2の上方方向に載置案内ガイド21が形成される。この載置案内ガイド21は容器11がベルトコンベア13に載置する際に転倒するのを防止するため形成される。
【0059】
また、容器11が完全にベルトコンベア13に載置された後、載置案内ガイド21は第一コンベア1方向に移動する。そして、ベルトコンベア13に載置された容器11は口部18を上方方向に向けて次工程に搬送される。
【0060】
前記次工程としては容器洗浄工程、容器殺菌工程、充填工程、開口部密封工程、充填物殺菌工程、ラベル貼り工程等がある充填する充填物あるいは保存方法、流通方法、流通条件等によって適宜選択される。
【0061】
次に、図8は本発明の容器の整列装置50の吸着回転昇降部と反転昇降部を説明するための説明図である。
【0062】
図8に示すように吸着回転昇降部7と反転昇降部9は昇降すめためスライドシャフト22とスライドシャフト受け23と駆動シリンダ24等から形成されている。そして、スライドシャフト22の昇降駆動はエアーシリンダまたは油圧シリンダ等の駆動シリンダ24を用いることができるが、特に限定するものではない。例えば、カム、エキセントリツク等の機械構造によりスライドシャフトを上昇、降下させても良い。
【0063】
次に、図9は本発明の容器の整列装置50の吸着回転部6と吸着回転移動部15と吸着回転昇降部7を説明するための説明図である。
【0064】
図9に示すように吸着回転部6はコンベア上に載置されている容器11の側面(胴部)の上方を吸着するバキュームパット16とバキュームカップ25とバキュームパイプ27と電動ロータリーアクチュエータ26とアクチュエータベース28等から形成されている。そして、前記アクチュエータベース28が吸着回転移動部15のシリンダーベース29と接合されている。
【0065】
また、吸着回転移動部15はシリンダーベース29とスライドシリンダー30とスライドベース31等で形成されている。そして、スライドベース31が吸着回転昇降部7のスライドシャフト22上を移動する。
【0066】
また、吸着回転昇降部7は横スライドシャフト47とベースフレーム32とシャフトブロック(図に示していない)と図8に示すスライドシャフト22とスライドシャフト受け23と駆動シリンダ24等から形成されている。そして、横スライドシャフト47はベースフレーム32の両先端で図には示していないが係着されている。
【0067】
次に、図10は本発明の容器の整列装置50の反転部8を説明するための説明図である。
【0068】
図9に示すように本発明の容器の整列装置50の反転部8は反転シャフト34とカップブラケット19とバキュームパット20とパットアダプタ33とバキュームカップ35と載置案内ガイド21と載置案内ガイド駆動用シリンダ36等から形成されている。
【0069】
前記載置案内ガイド駆動シリンダ36はエアーシリンダまたは油圧シリンダ等の駆動用シリンダを用いることができるが、特に限定するものではない。例えば、カム、エキセントリツク等の機械構造により載置案内ガイドを前後に駆動させてもよい。
【0070】
次に、図11は本発明の容器の整列装置50の入口ストッパー部3を説明するための説明図である。
【0071】
本発明の容器の整列装置50の入口ストッパー部3は図11に示すように第一コンベアの、フレーム37の外側面の両側面に接合されているストッパー取付台横板38とストッパー渡し板39とガイド付きシリンダ40とシリンダブラケット41とワイド形エア−ハンド42とホルダーライナー43とストッパーホルダープレート45とホルダーラバー46等から形成されている
そして、容器の側面(胴部)の略中央位置をストップホルダープレートの外側面にゴム、スポンジ等の弾性樹脂からなるホルダーラバーで押さえ、コンベアベルトで搬送されている容器が停止する。また容器を押さえるホルダーラバーは上述したようにゴム、スポンジ等の弾性樹脂からなるので容器に傷等を付けることがない。
【産業上の利用可能性】
【0072】
本発明の容器の整列装置50は容器の口部等が一定の方向に向いていない状態で搬送されてきても素早い速度で、容器に傷をつけることなく、且つ、設備スペースを取らず容器の方向を一定方向に向けられる整列装置として優れていることはもとより医薬分野や食品分野あるいは精密機械分野等の生産ライン等にも使用できる素晴らしい発明である。
【図面の簡単な説明】
【0073】
【図1】本発明の容器の整列装置の一実施例の平面の概略を示す概略図である。
【図2】本発明の容器の整列装置の一実施例の正面の概略を示す概略図である。
【図3】本発明の容器の整列装置で容器を整列する状態を説明する説明図である。
【図4】本発明の容器の整列装置で容器を整列する状態を説明する他の説明図である。
【図5】本発明の容器の整列装置で容器を整列する状態を説明するまた他の説明図である。
【図6】本発明の容器の整列装置で容器を整列する状態を説明するさらに他の説明図である。
【図7】本発明の容器の整列装置で容器を整列する状態を説明するまたさらに他の説明図である。
【図8】本発明の容器の整列装置50の吸着回転昇降部と反転昇降部を説明するための説明図である。
【図9】本発明の容器の整列装置50の吸着回転部6と吸着回転移動部15と吸着回転昇降部7を説明するための説明図である。
【図10】本発明の容器の整列装置50の反転部8を説明するための説明図である。
【図11】本発明の容器の整列装置50の入口ストッパー部3を説明するための説明図である。
【図12】本発明の容器の整列装置50の前工程に用いられる装置の概略を説明する概略図である。
【図13】本発明の容器の整列装置50の前工程に用いられる装置の概略を説明する他の概略図である。
【符号の説明】
【0074】
1…第一コンベア
2…第二コンベア
3…入口ストッパー部
4…容器先端検知センサー
5…検知部
6…吸着回転部
7…吸着回転昇降部
8…反転部
9…反転昇降部
10…前工程
11…容器
12…ベルトコンベア駆動モータ
13…ベルトコンベア
14…方向検知センサー
15…吸着回転移動部
16…バキュームパット
17…コンベアガイド
18…口部
19…カップブラケット
20…バキュームパット
21…載置案内ガイド
22…スライドシャフト
23…スライドシャフト受け
24…駆動シリンダ
25…バキュームカップ
26…電動ロータリーアクチュエータ
27…バキュームパイプ
28…アクチュエータベース
29…シリンダーベース
30…スライドシリンダー
31…スライドベース
32…ベースフレーム
33…パットアダプタ
34…反転シャフト
35…バキュームカップ
36…載置案内ガイド駆動用シリンダ
37…第一コンベアのフレーム
38…ストッパー取り付け台
39…ストッパー渡し板
40…ガイド付きシリンダ
41…シリンダブラケット
42…ワイド形エアーバンド
43…ホルダーライナー
44…ホルダーブラケット
45…ストッパーホルダープレート
46…ホルダーラバー
47…横スライドシャフト
50…本発明の容器の整列装置
60…容器ホッパー
70…ソーター
【特許請求の範囲】
【請求項1】
容器の口部が横転状態で、その容器の口部が一定方向に向いていない状態で、一列に並んで第一搬送コンベアで搬送され、搬送された容器の口部の方向を検知して、該容器の口部の方向を一定方向にすると共に、該容器の口部を上方に向けて正立状態で第二搬送コンベアに一列に整列させて搬送する容器の整列装置であって、
前記第一搬送コンベアに横転状態で、連続搬送されてくる容器を、第一搬送コンベアの先端に設けた容器先端検知センサーからの信号によって容器の搬送を停止または搬送させる入口ストッパー部と、
前記入口ストッパー部の先端方向の、第一搬送コンベアの外側方向左右に第一搬送コンベアに横転状態で搬送された容器の口部の方向を検知する複数の検知部と、
前記検知部の第一搬送コンベアの上方方向に前記検知部で検知した容器を降下した吸着盤で吸着し、上昇しながら検知信号により吸着している容器を回して容器の口部の方向を一定方向に向ける複数の吸着回転部と、
前記第一搬送コンベアの先端方向の右側方向に搬送方向が第一搬送コンベアと同じ方向、並列に搬送する第二搬送コンベアと、
前記第二搬送コンベアと並列に搬送する第一搬送コンベアの中間位置に複数の吸着回転部を昇降させる吸着回転昇降部と、
前記吸着回転昇降部の上方方向に前記複数の吸着回転部に吸着されている容器を第二搬送コンベアと第一搬送コンベアの中間位置まで水平に往復移動する吸着回転移動部と、
前記第二搬送コンベアの上方方向に前記複数の吸着回転部の吸着盤で吸着されている容器の下方側面を吸着して複数の容器を受け渡し、受け渡された複数の容器の口部を上方に向けて正立状態に反転する反転部と、
前記第二搬送コンベアの搬送方向右側の外側方向に反転部に吸着されている複数の容器の口部を、上方に向けて正立状態で、整列して第二搬送コンベアの上方方向から載置するための反転昇降部と
を具備することを特徴とする容器の整列装置。
【請求項2】
前記検知部は光の透過の違いによって容器の口部の向きを検知することを特徴とする請求項1記載の容器の整列装置。
【請求項1】
容器の口部が横転状態で、その容器の口部が一定方向に向いていない状態で、一列に並んで第一搬送コンベアで搬送され、搬送された容器の口部の方向を検知して、該容器の口部の方向を一定方向にすると共に、該容器の口部を上方に向けて正立状態で第二搬送コンベアに一列に整列させて搬送する容器の整列装置であって、
前記第一搬送コンベアに横転状態で、連続搬送されてくる容器を、第一搬送コンベアの先端に設けた容器先端検知センサーからの信号によって容器の搬送を停止または搬送させる入口ストッパー部と、
前記入口ストッパー部の先端方向の、第一搬送コンベアの外側方向左右に第一搬送コンベアに横転状態で搬送された容器の口部の方向を検知する複数の検知部と、
前記検知部の第一搬送コンベアの上方方向に前記検知部で検知した容器を降下した吸着盤で吸着し、上昇しながら検知信号により吸着している容器を回して容器の口部の方向を一定方向に向ける複数の吸着回転部と、
前記第一搬送コンベアの先端方向の右側方向に搬送方向が第一搬送コンベアと同じ方向、並列に搬送する第二搬送コンベアと、
前記第二搬送コンベアと並列に搬送する第一搬送コンベアの中間位置に複数の吸着回転部を昇降させる吸着回転昇降部と、
前記吸着回転昇降部の上方方向に前記複数の吸着回転部に吸着されている容器を第二搬送コンベアと第一搬送コンベアの中間位置まで水平に往復移動する吸着回転移動部と、
前記第二搬送コンベアの上方方向に前記複数の吸着回転部の吸着盤で吸着されている容器の下方側面を吸着して複数の容器を受け渡し、受け渡された複数の容器の口部を上方に向けて正立状態に反転する反転部と、
前記第二搬送コンベアの搬送方向右側の外側方向に反転部に吸着されている複数の容器の口部を、上方に向けて正立状態で、整列して第二搬送コンベアの上方方向から載置するための反転昇降部と
を具備することを特徴とする容器の整列装置。
【請求項2】
前記検知部は光の透過の違いによって容器の口部の向きを検知することを特徴とする請求項1記載の容器の整列装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2008−247494(P2008−247494A)
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願番号】特願2007−87404(P2007−87404)
【出願日】平成19年3月29日(2007.3.29)
【出願人】(000003193)凸版印刷株式会社 (10,630)
【Fターム(参考)】
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願日】平成19年3月29日(2007.3.29)
【出願人】(000003193)凸版印刷株式会社 (10,630)
【Fターム(参考)】
[ Back to top ]