
容器の自動搬入・識別装置及び分析装置
【課題】装置への搬入時に試薬を飛散させたり、別体の位置センサを用いることなく、容器を自動的に搬入しつつ識別できるようにする。
【解決手段】収納手段(20)に並置された複数の容器(10)を、装置に搬入するための容器の自動搬入・識別装置であって、前記収納手段を装置へ自動的に搬入するための搬送手段(52)と、該搬送手段の駆動量を検出するための駆動量検出手段(56)と、容器を検出するための容器検出手段(24)と、該容器検出手段の出力に応じて、容器の識別記号(12)を読み取る識別記号読取り手段(26)とを備え、前記駆動量検出手段(56)で検出された位置情報と、前記識別記号読取り手段(26)で読み取られた識別記号により、どの位置に何の容器が配置されたかを識別する。
【解決手段】収納手段(20)に並置された複数の容器(10)を、装置に搬入するための容器の自動搬入・識別装置であって、前記収納手段を装置へ自動的に搬入するための搬送手段(52)と、該搬送手段の駆動量を検出するための駆動量検出手段(56)と、容器を検出するための容器検出手段(24)と、該容器検出手段の出力に応じて、容器の識別記号(12)を読み取る識別記号読取り手段(26)とを備え、前記駆動量検出手段(56)で検出された位置情報と、前記識別記号読取り手段(26)で読み取られた識別記号により、どの位置に何の容器が配置されたかを識別する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、容器の自動搬入・識別装置及び分析装置に係り、特に、創薬スクリーン分野、バイオテクノロジー、ライフサイエンス分野等で血液等の検体を数種類の試薬に反応させ、又は、複数種類の試薬同士を反応させて分析を行なう自動分注分析装置に用いるのに好適な、試薬を貯留した複数個の試薬ボトルを装置に自動的に搬入しながら、試薬の品種や種類を自動的に認識することが可能な容器の自動搬入・識別装置、及び、これを備えた分析装置に関する。
【背景技術】
【0002】
生化学等の分野において、血液等の検体や試薬等の液体を自動的に吸引し、分注して分析する分注分析装置が用いられている。この分注分析装置では、多種類の液体を対象として連続的に分注が実施される場合が少なくない。従って、分注分析装置の検査対象となる液体は、取り違え等の致命的なミスを無くすために、一つ一つ識別する必要がある。
【0003】
そこで、作業者が一つ一つ制御装置に入力するか、又は、特許文献1のように、試薬ボトルに付された識別記号(バーコード)を作業者が一つ一つバーコードリーダで読み取る必要があった。
【0004】
又、特許文献2には、検体別に固有のマークが付された検体カップを検体ホルダに収容配列すると共に、試薬別に固有のマークが付された試薬ボトルを試薬ホルダに収容配列し、前記検体カップのマーク及び試薬ボトルのマークをマークリーダで読み取ることが記載されている。
【0005】
又、特許文献3には、回転式の試薬トレイ上に試薬容器をセットしながら、そのバーコードを読み取ることが記載されている。
【0006】
【特許文献1】特開2000−266764号公報
【特許文献2】特開2001−74752号公報
【特許文献3】特許第3521142号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載されたようなハンディタイプの識別装置を使用する場合には、識別装置を人手で任意に移動できるため、識別記号の対象である試薬ボトルを取り違えたり、識別装置を試薬ボトルに衝突させて液体をこぼす等の人為的なミスが発生する恐れがあり、又、分注分析装置内部に手を入れる必要があるため、危険もあった。
【0008】
又、特許文献2に記載の技術は、マークやバーコードを読み取るだけであり、その際に試薬ボトルの位置を検出していなかったため、高精度な読取りが困難な場合があった。更に、特許文献2では、試薬ホルダや検体ホルダを途中で逆方向に移動できないという問題もあった。
【0009】
又、特許文献3に記載の技術は、セット時に試薬トレイを回転させながら読み取るものであり、試薬トレイの回転量を検出するための別体の位置センサが必要なだけでなく、手作業でトレイ上にまとめてセットされた試薬容器のバーコードを搬入時に読み取るものでは無かった。
【0010】
又、試薬ボトルの入ったトレイを作業者が手で挿入する方法では、トレイの挿入速度や衝撃によっては、中の試薬が飛散してしまう恐れもあった。
【0011】
本発明は、前記従来の問題点を解決するべくなされたもので、装置への搬入時に試薬を飛散させたり、別体の位置センサを用いることなく、容器を自動的に搬入しつつ識別することを課題とする。
【課題を解決するための手段】
【0012】
本発明は、収納手段に並置された複数の容器を、装置に搬入するための容器の搬入・識別装置であって、前記収納手段を装置へ自動的に搬入するための搬入手段と、該搬入手段の駆動量を検出するための駆動量検出手段と、容器を検出するための容器検出手段と、該容器検出手段の出力に応じて、容器の識別記号を読み取る識別記号読取り手段とを備え、前記駆動量検出手段で検出された位置情報と、前記識別記号読取り手段で読み取られた識別記号により、どの位置に何の容器が配置されたか識別するようにして、前記課題を解決したものである。
【0013】
本発明は、又、前記の容器の自動搬入・識別装置を備えたことを特徴とする分析装置を提供するものである。
【発明の効果】
【0014】
本発明によれば、容器搬入時に、その中の液体等を飛散させたり、位置情報を得るための分解能が高い高性能なエンコーダ等の別体の位置センサを用いることなく、容器の配列を自動的に読み取ることができ、多量の容器を使用する場合の入力作業を大幅に軽減できる。又、装置への誤入力を防止することが可能となり、正確性が大幅に向上できる。更に、容器収納手段の自動搬入動作により自動で読み取ることができ、容器収納手段をセットした後の読取り動作が不要となる。
【発明を実施するための最良の形態】
【0015】
以下図面を参照して、本発明の実施形態を詳細に説明する。
【0016】
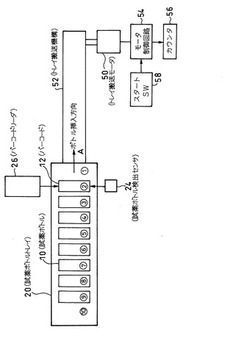
図1は、本発明の一実施形態を示す自動分注分析装置(以下、単に装置と称する)の試薬ボトル設置部の構成図である。
【0017】
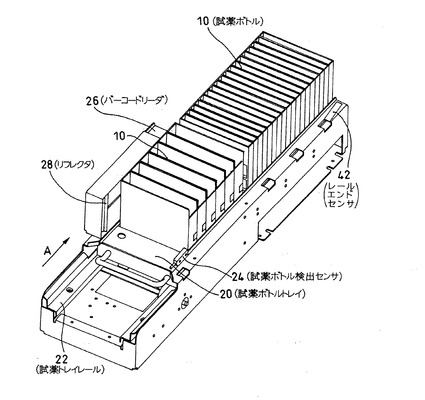
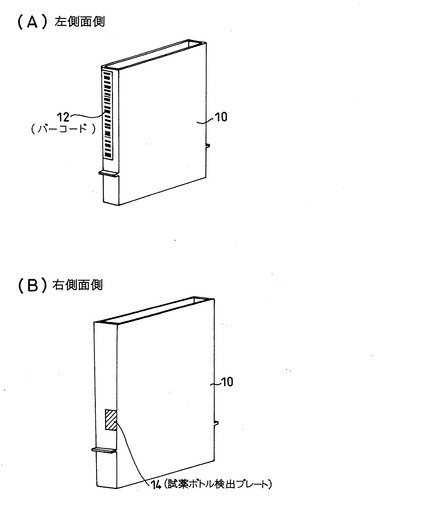
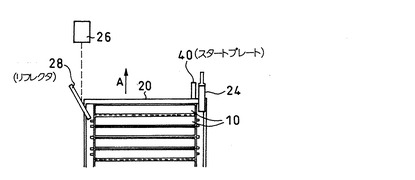
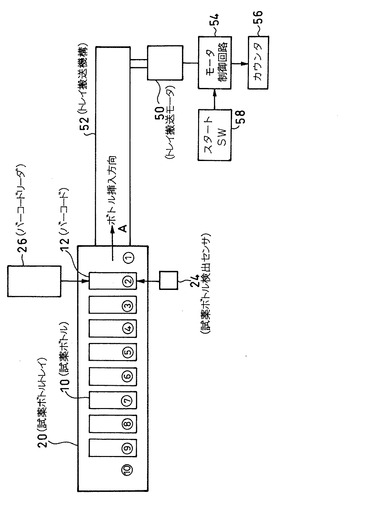
図1において、10は、検体へ分注するための試薬を使用量のみ注入し、装置へ設置するための試薬ボトル、12は、図2(A)に例示する如く、該試薬ボトル10の例えば左側面に貼り付けられた、試薬ボトル10の種類及び注入された試薬の種類を記載した幾何学記号であるバーコード、14は、図2(B)に例示する如く、前記試薬ボトル10の例えば右側面に貼り付けられた、例えば金属製の試薬ボトル検出プレート、20は、複数の試薬ボトル10を並置するための収納手段である試薬ボトルトレイ、22は、該試薬ボトルトレイ20を装置へセットするときに矢印Aに示す方向に挿入可能とするための試薬トレイレール、24は、図3に詳細に示す如く、試薬ボトル10の右側面に貼り付けられた試薬ボトル検出プレート14(図2(B)参照)を検出して試薬ボトル10の通過を検出するための、例えば近接スイッチでなる試薬ボトル検出センサ、26は、同じく図3に詳細に示す如く、リフレクタ28の反射を利用して前記試薬ボトル10の左側面に貼り付けられたバーコード12(図2(A)参照)を読み取るためのバーコードリーダ、40は、図3に示した如く、前記試薬ボトルトレイ20の先端に設置された、試薬ボトル通過初期動作において前記試薬ボトル検出センサ24で検出可能な、例えば金属製のスタートプレート、42は、前記試薬ボトルトレイ20が試薬トレイレール22の最終端まで挿入されたことを前記スタートプレート40で検出するための、例えば近接スイッチでなるレールエンドセンサである。
【0018】
図4は、前記実施形態の要部構成を示す平面図であり、前記試薬ボトルトレイ20を装置内へ搬入するための、トレイ搬送モータ50によって駆動される、例えばラックアンドピニオン機構(図示省略)を備えたトレイ搬送機構52を備えている。
【0019】
前記トレイ搬送モータ52は、例えばステッピングモータとされ、その制御回路54と、該モータ制御回路54から出力される駆動パルスを計数するカウンタ56が備えられている。図において、58はスタートスイッチである。
【0020】
図4は、10本の試薬ボトル10を設置できる試薬ボトルトレイ20の例であり、このうち、2番から8番に試薬ボトル10が設置され、1番と10番は空きの場合を示している。
【0021】
以下動作を説明する。
【0022】
まず作業者は、試薬ボトル10に試薬を注ぎ、図4に示した如く、トレイ搬送機構52が最も前に出た状態で、該トレイ搬送機構52に試薬ボトルトレイ20をセットし、モータ制御回路54のスタートスイッチ58を押す。
【0023】
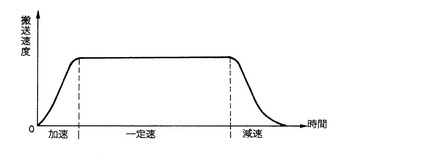
すると、トレイ搬送モータ50は回転を始め、トレイ搬送機構52がトレイ20を装置内に搬入する。このとき、モータ50の回転立ち上がり加速及び搬送中の一定速は、図5に例示する如く、試薬液のこぼれや飛散防止を十分考慮した、滑らかな速度プロファイルにて駆動される。これは、予め実験により決めることができる。
【0024】
又、前記カウンタ56は、ステッピングモータ50を1パルス回転させる毎にカウント値をインクリメントする。
【0025】
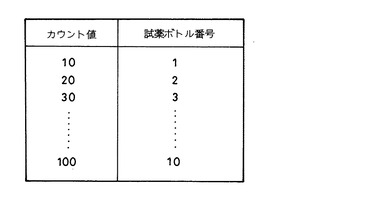
搬送開始後、ボトル検出センサ24により試薬ボトル10が検知されると、そのときのカウント値(絶対位置に対応)を記憶すると共に、ボトル側面に貼られているバーコード12をバーコードリーダ26で読み取る。これにより、試薬ボトル10内の試薬の判別が行なえる。
【0026】
なお、カウンタ58のカウント値と、そのときの試薬ボトルの位置は、予め図6に示す如く決められており、カウント値が分かれば、何番目のボトルに相当するかが分かるようになっている。
【0027】
搬送を続け、搬送終了位置が近づいたら、図5に例示した如く、再び滑らかな速度プロファイルにて減速を行なう。
【0028】
以上により、何番目のボトル位置に、どういう試薬が入ったボトル10が設置されているか自動的に認識できる。
【0029】
本実施形態においては、トレイ搬送モータ50としてステッピングモータを用いているので、駆動パルスをカウントすることにより、駆動量を容易に知ることができる。なお、トレイ搬送モータの種類はこれに限定されず、例えばロータリエンコーダが内蔵されたモータを用いることも可能である。
【0030】
又、図3に示した如く、リフレクタ28を用いた場合には、バーコードリーダ26を試薬ボトルトレイ20の進行方向に設置することができ、幅方向の寸法を節約できる。なお、図4に示した如く、リフレクタ28を用いることなく、バーコードリーダ26を試薬ボトル10の側面方向に直接設けることも可能である。
【0031】
前記実施形態においては、容器の識別記号がバーコード12とされ、バーコードリーダ26により識別記号を読み取るようにされていたが、識別記号読取り手段は、これに限定されず、例えば、バーコードをICタグ情報等に置き換えることもできる。
【0032】
又、容器検出手段である試薬ボトル検出センサ24も、金属板と近接スイッチの組合せに限定されず、例えば反射板と光電スイッチの組合せに置き換えることもできる。
【0033】
前記実施形態においては、本発明が、分注分析装置の試薬情報の検出認識に適用されていたが、本発明の適用対象はこれに限定されず、容器情報の認識一般に同様に適用できることは明らかである。
【図面の簡単な説明】
【0034】
【図1】本発明が適用される分注分析装置の試薬ボトル設置部の構成を示す斜視図
【図2】本発明の実施形態で用いられる試薬ボトルを示す(A)左側面側から見た斜視図及び(B)右側面側から見た斜視図
【図3】前記実施形態におけるバーコードリーダ及び試薬ボトル検出センサの配置を示す平面図
【図4】同じく要部の構成を示す平面図
【図5】同じく搬送速度の一例の速度プロファイルを示す線図
【図6】同じくカウント値とボトル位置の関係の例を示す線図
【符号の説明】
【0035】
10…試薬ボトル(容器)
12…バーコード(識別記号)
14…試薬ボトル検出プレート
20…試薬ボトルトレイ(収納手段)
22…試薬トレイレール
24…試薬ボトル検出センサ(容器検出手段)
26…バーコードリーダ(識別記号読取り手段)
40…スタートプレート
42…レールエンドセンサ
50…トレイ搬送モータ
52…トレイ搬送機構(搬送手段)
54…モータ制御回路
56…カウンタ(駆動量検出手段)
58…スタートスイッチ
【技術分野】
【0001】
本発明は、容器の自動搬入・識別装置及び分析装置に係り、特に、創薬スクリーン分野、バイオテクノロジー、ライフサイエンス分野等で血液等の検体を数種類の試薬に反応させ、又は、複数種類の試薬同士を反応させて分析を行なう自動分注分析装置に用いるのに好適な、試薬を貯留した複数個の試薬ボトルを装置に自動的に搬入しながら、試薬の品種や種類を自動的に認識することが可能な容器の自動搬入・識別装置、及び、これを備えた分析装置に関する。
【背景技術】
【0002】
生化学等の分野において、血液等の検体や試薬等の液体を自動的に吸引し、分注して分析する分注分析装置が用いられている。この分注分析装置では、多種類の液体を対象として連続的に分注が実施される場合が少なくない。従って、分注分析装置の検査対象となる液体は、取り違え等の致命的なミスを無くすために、一つ一つ識別する必要がある。
【0003】
そこで、作業者が一つ一つ制御装置に入力するか、又は、特許文献1のように、試薬ボトルに付された識別記号(バーコード)を作業者が一つ一つバーコードリーダで読み取る必要があった。
【0004】
又、特許文献2には、検体別に固有のマークが付された検体カップを検体ホルダに収容配列すると共に、試薬別に固有のマークが付された試薬ボトルを試薬ホルダに収容配列し、前記検体カップのマーク及び試薬ボトルのマークをマークリーダで読み取ることが記載されている。
【0005】
又、特許文献3には、回転式の試薬トレイ上に試薬容器をセットしながら、そのバーコードを読み取ることが記載されている。
【0006】
【特許文献1】特開2000−266764号公報
【特許文献2】特開2001−74752号公報
【特許文献3】特許第3521142号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載されたようなハンディタイプの識別装置を使用する場合には、識別装置を人手で任意に移動できるため、識別記号の対象である試薬ボトルを取り違えたり、識別装置を試薬ボトルに衝突させて液体をこぼす等の人為的なミスが発生する恐れがあり、又、分注分析装置内部に手を入れる必要があるため、危険もあった。
【0008】
又、特許文献2に記載の技術は、マークやバーコードを読み取るだけであり、その際に試薬ボトルの位置を検出していなかったため、高精度な読取りが困難な場合があった。更に、特許文献2では、試薬ホルダや検体ホルダを途中で逆方向に移動できないという問題もあった。
【0009】
又、特許文献3に記載の技術は、セット時に試薬トレイを回転させながら読み取るものであり、試薬トレイの回転量を検出するための別体の位置センサが必要なだけでなく、手作業でトレイ上にまとめてセットされた試薬容器のバーコードを搬入時に読み取るものでは無かった。
【0010】
又、試薬ボトルの入ったトレイを作業者が手で挿入する方法では、トレイの挿入速度や衝撃によっては、中の試薬が飛散してしまう恐れもあった。
【0011】
本発明は、前記従来の問題点を解決するべくなされたもので、装置への搬入時に試薬を飛散させたり、別体の位置センサを用いることなく、容器を自動的に搬入しつつ識別することを課題とする。
【課題を解決するための手段】
【0012】
本発明は、収納手段に並置された複数の容器を、装置に搬入するための容器の搬入・識別装置であって、前記収納手段を装置へ自動的に搬入するための搬入手段と、該搬入手段の駆動量を検出するための駆動量検出手段と、容器を検出するための容器検出手段と、該容器検出手段の出力に応じて、容器の識別記号を読み取る識別記号読取り手段とを備え、前記駆動量検出手段で検出された位置情報と、前記識別記号読取り手段で読み取られた識別記号により、どの位置に何の容器が配置されたか識別するようにして、前記課題を解決したものである。
【0013】
本発明は、又、前記の容器の自動搬入・識別装置を備えたことを特徴とする分析装置を提供するものである。
【発明の効果】
【0014】
本発明によれば、容器搬入時に、その中の液体等を飛散させたり、位置情報を得るための分解能が高い高性能なエンコーダ等の別体の位置センサを用いることなく、容器の配列を自動的に読み取ることができ、多量の容器を使用する場合の入力作業を大幅に軽減できる。又、装置への誤入力を防止することが可能となり、正確性が大幅に向上できる。更に、容器収納手段の自動搬入動作により自動で読み取ることができ、容器収納手段をセットした後の読取り動作が不要となる。
【発明を実施するための最良の形態】
【0015】
以下図面を参照して、本発明の実施形態を詳細に説明する。
【0016】
図1は、本発明の一実施形態を示す自動分注分析装置(以下、単に装置と称する)の試薬ボトル設置部の構成図である。
【0017】
図1において、10は、検体へ分注するための試薬を使用量のみ注入し、装置へ設置するための試薬ボトル、12は、図2(A)に例示する如く、該試薬ボトル10の例えば左側面に貼り付けられた、試薬ボトル10の種類及び注入された試薬の種類を記載した幾何学記号であるバーコード、14は、図2(B)に例示する如く、前記試薬ボトル10の例えば右側面に貼り付けられた、例えば金属製の試薬ボトル検出プレート、20は、複数の試薬ボトル10を並置するための収納手段である試薬ボトルトレイ、22は、該試薬ボトルトレイ20を装置へセットするときに矢印Aに示す方向に挿入可能とするための試薬トレイレール、24は、図3に詳細に示す如く、試薬ボトル10の右側面に貼り付けられた試薬ボトル検出プレート14(図2(B)参照)を検出して試薬ボトル10の通過を検出するための、例えば近接スイッチでなる試薬ボトル検出センサ、26は、同じく図3に詳細に示す如く、リフレクタ28の反射を利用して前記試薬ボトル10の左側面に貼り付けられたバーコード12(図2(A)参照)を読み取るためのバーコードリーダ、40は、図3に示した如く、前記試薬ボトルトレイ20の先端に設置された、試薬ボトル通過初期動作において前記試薬ボトル検出センサ24で検出可能な、例えば金属製のスタートプレート、42は、前記試薬ボトルトレイ20が試薬トレイレール22の最終端まで挿入されたことを前記スタートプレート40で検出するための、例えば近接スイッチでなるレールエンドセンサである。
【0018】
図4は、前記実施形態の要部構成を示す平面図であり、前記試薬ボトルトレイ20を装置内へ搬入するための、トレイ搬送モータ50によって駆動される、例えばラックアンドピニオン機構(図示省略)を備えたトレイ搬送機構52を備えている。
【0019】
前記トレイ搬送モータ52は、例えばステッピングモータとされ、その制御回路54と、該モータ制御回路54から出力される駆動パルスを計数するカウンタ56が備えられている。図において、58はスタートスイッチである。
【0020】
図4は、10本の試薬ボトル10を設置できる試薬ボトルトレイ20の例であり、このうち、2番から8番に試薬ボトル10が設置され、1番と10番は空きの場合を示している。
【0021】
以下動作を説明する。
【0022】
まず作業者は、試薬ボトル10に試薬を注ぎ、図4に示した如く、トレイ搬送機構52が最も前に出た状態で、該トレイ搬送機構52に試薬ボトルトレイ20をセットし、モータ制御回路54のスタートスイッチ58を押す。
【0023】
すると、トレイ搬送モータ50は回転を始め、トレイ搬送機構52がトレイ20を装置内に搬入する。このとき、モータ50の回転立ち上がり加速及び搬送中の一定速は、図5に例示する如く、試薬液のこぼれや飛散防止を十分考慮した、滑らかな速度プロファイルにて駆動される。これは、予め実験により決めることができる。
【0024】
又、前記カウンタ56は、ステッピングモータ50を1パルス回転させる毎にカウント値をインクリメントする。
【0025】
搬送開始後、ボトル検出センサ24により試薬ボトル10が検知されると、そのときのカウント値(絶対位置に対応)を記憶すると共に、ボトル側面に貼られているバーコード12をバーコードリーダ26で読み取る。これにより、試薬ボトル10内の試薬の判別が行なえる。
【0026】
なお、カウンタ58のカウント値と、そのときの試薬ボトルの位置は、予め図6に示す如く決められており、カウント値が分かれば、何番目のボトルに相当するかが分かるようになっている。
【0027】
搬送を続け、搬送終了位置が近づいたら、図5に例示した如く、再び滑らかな速度プロファイルにて減速を行なう。
【0028】
以上により、何番目のボトル位置に、どういう試薬が入ったボトル10が設置されているか自動的に認識できる。
【0029】
本実施形態においては、トレイ搬送モータ50としてステッピングモータを用いているので、駆動パルスをカウントすることにより、駆動量を容易に知ることができる。なお、トレイ搬送モータの種類はこれに限定されず、例えばロータリエンコーダが内蔵されたモータを用いることも可能である。
【0030】
又、図3に示した如く、リフレクタ28を用いた場合には、バーコードリーダ26を試薬ボトルトレイ20の進行方向に設置することができ、幅方向の寸法を節約できる。なお、図4に示した如く、リフレクタ28を用いることなく、バーコードリーダ26を試薬ボトル10の側面方向に直接設けることも可能である。
【0031】
前記実施形態においては、容器の識別記号がバーコード12とされ、バーコードリーダ26により識別記号を読み取るようにされていたが、識別記号読取り手段は、これに限定されず、例えば、バーコードをICタグ情報等に置き換えることもできる。
【0032】
又、容器検出手段である試薬ボトル検出センサ24も、金属板と近接スイッチの組合せに限定されず、例えば反射板と光電スイッチの組合せに置き換えることもできる。
【0033】
前記実施形態においては、本発明が、分注分析装置の試薬情報の検出認識に適用されていたが、本発明の適用対象はこれに限定されず、容器情報の認識一般に同様に適用できることは明らかである。
【図面の簡単な説明】
【0034】
【図1】本発明が適用される分注分析装置の試薬ボトル設置部の構成を示す斜視図
【図2】本発明の実施形態で用いられる試薬ボトルを示す(A)左側面側から見た斜視図及び(B)右側面側から見た斜視図
【図3】前記実施形態におけるバーコードリーダ及び試薬ボトル検出センサの配置を示す平面図
【図4】同じく要部の構成を示す平面図
【図5】同じく搬送速度の一例の速度プロファイルを示す線図
【図6】同じくカウント値とボトル位置の関係の例を示す線図
【符号の説明】
【0035】
10…試薬ボトル(容器)
12…バーコード(識別記号)
14…試薬ボトル検出プレート
20…試薬ボトルトレイ(収納手段)
22…試薬トレイレール
24…試薬ボトル検出センサ(容器検出手段)
26…バーコードリーダ(識別記号読取り手段)
40…スタートプレート
42…レールエンドセンサ
50…トレイ搬送モータ
52…トレイ搬送機構(搬送手段)
54…モータ制御回路
56…カウンタ(駆動量検出手段)
58…スタートスイッチ
【特許請求の範囲】
【請求項1】
収納手段に並置された複数の容器を、装置に搬入するための容器の搬入・識別装置であって、
前記収納手段を装置へ自動的に搬入するための搬送手段と、
該搬送手段の駆動量を検出するための駆動量検出手段と、
容器を検出するための容器検出手段と、
該容器検出手段の出力に応じて、容器の識別記号を読み取る識別記号読取り手段とを備え、
前記駆動量検出手段で検出された位置情報と、前記識別記号読取り手段で読み取られた識別記号により、どの位置に何の容器が配置されたか識別することを特徴とする容器の自動搬入・識別装置。
【請求項2】
請求項1に記載の容器の自動搬入・識別装置を備えたことを特徴とする分析装置。
【請求項1】
収納手段に並置された複数の容器を、装置に搬入するための容器の搬入・識別装置であって、
前記収納手段を装置へ自動的に搬入するための搬送手段と、
該搬送手段の駆動量を検出するための駆動量検出手段と、
容器を検出するための容器検出手段と、
該容器検出手段の出力に応じて、容器の識別記号を読み取る識別記号読取り手段とを備え、
前記駆動量検出手段で検出された位置情報と、前記識別記号読取り手段で読み取られた識別記号により、どの位置に何の容器が配置されたか識別することを特徴とする容器の自動搬入・識別装置。
【請求項2】
請求項1に記載の容器の自動搬入・識別装置を備えたことを特徴とする分析装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2007−24712(P2007−24712A)
【公開日】平成19年2月1日(2007.2.1)
【国際特許分類】
【出願番号】特願2005−208289(P2005−208289)
【出願日】平成17年7月19日(2005.7.19)
【出願人】(000003399)JUKI株式会社 (1,557)
【Fターム(参考)】
【公開日】平成19年2月1日(2007.2.1)
【国際特許分類】
【出願日】平成17年7月19日(2005.7.19)
【出願人】(000003399)JUKI株式会社 (1,557)
【Fターム(参考)】
[ Back to top ]