
容器リンサおよびそのリンス方法
【課題】洗浄ノズルの容器内への昇降量を容器高さに対応する等微粒子の除去率を高めるとともに、容器高さの種類が変わった場合に容器高さに対応して洗浄ノズル昇降量変更の型替えを簡単な操作で行える洗浄ノズル昇降量自動変更装置を備えた容器リンサ及びそのリンス方法を提供する。
【解決手段】本発明に係る容器リンサのリンス方法は、PETボトル等の容器3を把持する把持装置を円周等分に備えた回転円板の回転によって容器3を搬送中に、把持装置と同期して回転し、容器に対応した位置で容器に対して昇降して、容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルを備えた容器リンサのリンス方法において、洗浄ノズルの容器への昇降量を容器高さの種類に対応して変更するものである。
【解決手段】本発明に係る容器リンサのリンス方法は、PETボトル等の容器3を把持する把持装置を円周等分に備えた回転円板の回転によって容器3を搬送中に、把持装置と同期して回転し、容器に対応した位置で容器に対して昇降して、容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルを備えた容器リンサのリンス方法において、洗浄ノズルの容器への昇降量を容器高さの種類に対応して変更するものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、飲料を充填するPETボトル等の容器を電子線殺菌装置で殺菌する前工程、或いは、PETボトル等の容器の表面を成膜装置で成膜処理した後工程等において、洗浄ノズルからの気体噴射により容器に付着している微粒子等を除去する容器リンサに関する。
【背景技術】
【0002】
PETボトル等の容器内外面を洗浄ノズルからのリンス水等の噴射により洗浄する容器リンサは公知技術となっている。(特許文献1)
また、PETボトル等の容器の表面を成膜装置で成膜処理した後工程において、ノズルからのエア吹付けにより容器の中の内面に付着している除去対象物質をその内面から剥がし取る容器清浄装置が公知技術となっている。(特許文献2)
近年、PETボトル等の容器を電子線殺菌装置で殺菌すること、或いは、PETボトル等の容器の表面を成膜装置で成膜処理することが行われるようになってきているが、前記容器を電子線で殺菌する殺菌効率を上げるために、前工程でリンスして容器に付着している微粒子等を高い除去率で除去すること、或いは、成膜処理した容器表面の付着物を後工程でリンスして高い除去率で除去することが求められている。また、対象とする容器の種類が多様化されつつあり、複数の容器高さに対しては、容器高さに対応する型替えに際して、その都度容器リンサを長時間停止して型替えを行っているため、この型替えにより生産ラインの生産性が悪くなっていることから、複数の容器高さに対する型替えの簡素化が叫ばれている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−90377号公報(図2、図4)
【特許文献2】特開2004−8976号公報(図6〜図10)
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記特許文献1によれば、容器洗浄装置は、昇降可能な洗浄ノズルから洗浄液を噴射して、倒立した容器の外周面を洗浄するとしている。
しかしながら、前記特許文献1の技術では、倒立した容器の外周面を洗浄液で洗浄する技術についてのみ開示しているが、倒立した容器の内面を洗浄する洗浄ノズルの昇降についての技術は開示されておらず、また、倒立した容器を電子線殺菌装置で殺菌する前工程等において、容器に付着している微粒子を気体噴射によりドライ状態でリンスする技術についても開示されていない。
【0005】
前記特許文献2によれば、成膜装置の後工程の清浄化装置は、倒立した容器の口から中へノズルを挿入してノズルから空気を吐出し、容器の中の内面に付着している炭素微粒子などの物質を内面から剥がし取り、吐出された空気を吸引することにより付着物質の再付着が抑止されるとしている。
しかしながら、前記特許文献2の技術では、容器高さが変わる場合のことが言及されていない。即ち、ノズルから吐出される空気は比重が小さいことにより、比重が大きい水のような液体の場合と違って、容器の内面への吹き付け力が小さく、容器の中の内面に付着している炭素微粒子などの物質を内面から完全に剥がし取るためには、ノズル位置を容器に近い状態にする必要があり、容器高さが変わる場合にはノズルの容器の中への挿入量を容器の高さに合わせて変えることが要求されるが、前記特許文献2の技術では、ノズルの容器の中への挿入量を容器高さに対応して変えるという技術、また、ノズルの容器の中への挿入量を自動的に変えるという技術については開示されていない。
【0006】
本発明は、PETボトル等の容器を電子線殺菌装置で殺菌する前工程、或いは、PETボトル等の容器の表面を成膜装置で成膜処理する後工程等において、容器に付着している微粒子を洗浄ノズルから水等の液体ではなくてエア等の気体噴射により高い除去率で除去することが求められているロータリー式容器リンサにおいて、前記洗浄ノズルの前記容器内への昇降量を容器高さに対応する等微粒子の除去率を高めるとともに、容器高さの種類が変わった場合に容器高さに対応して洗浄ノズル昇降量変更の型替えを簡単な操作で行える洗浄ノズル昇降量自動変更装置を備えた容器リンサを提供することを目的としている。
【課題を解決するための手段】
【0007】
前記の課題に対し、本発明は以下の手段により解決を図る。
(1)第1の手段の容器リンサのリンス方法は、PETボトル等の容器を把持する把持装置を円周等分に備えた回転円板の回転によって前記容器を搬送中に、前記把持装置と同期して回転し、前記容器に対応した位置で前記容器に対して昇降して、前記容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルを備えた容器リンサのリンス方法において、前記洗浄ノズルの前記容器への昇降量を容器高さの種類に対応して変更するようにしたことを特徴とする。
【0008】
(2)第2の手段の容器リンサは、PETボトル等の容器を把持する把持装置を円周等分に備えた回転円板の回転により前記容器を搬送する搬送装置と、該搬送装置により前記容器を搬送中に前記把持装置と同期して回転し、前記容器に対応した位置で前記容器に対して昇降して前記容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルと、上流から搬送されてくる前記容器を前記把持装置に受渡し供給する受渡し供給装置と、前記容器を前記把持装置から受渡し排出する受渡し排出装置を備えた容器リンサにおいて、前記容器高さの種類に対応して、前記洗浄ノズルの昇降量を自動的に変更できるように構成した洗浄ノズル昇降量自動変更装置を備えたことを特徴とする。
【0009】
(3)第3の手段の容器リンサは、前記第2の手段の容器リンサにおいて、前記洗浄ノズル昇降量自動変更装置を、前記洗浄ノズルに取り付けられたローラと、該ローラに係合する円周カムを設け、該円周カムが円周の一端側を支点として、他端側を制御装置からの指令で作動するアクチュエータによって昇降させることにより、カムリフト量を変更できるように構成したことを特徴とする。
【0010】
(4)第4の手段の容器リンサは、前記第2および第3の手段の容器リンサにおいて、前記洗浄ノズルに容器内のリンス後の気体を吸引する吸引ノズルを付設したことを特徴とする。
【0011】
(5)第5の手段の容器リンサは、前記第2から第4の手段の容器リンサにおいて、前記容器のリンス工程の前に、前記容器に付着している帯電性微粒子を前記容器から予め浮遊しやすくさせるための除電装置を設けたことを特徴とする。
【0012】
(6)第6の手段の容器リンサは、前記第2から第5の手段の容器リンサにおいて、前記洗浄ノズルが前記受渡し排出の位置から受渡し供給の位置まで回転移動する途中の位置に、前記洗浄ノズルの気体噴射機能確認のための噴射確認センサを設けたことを特徴とする。
【0013】
(7)第7の手段の容器リンサは、前記第2から第6の手段の容器リンサにおいて、前記洗浄ノズルが前記受渡し排出の位置から受渡し供給の位置まで回転移動する途中の位置に、前記吸引ノズルの容器内リンス後の気体吸引機能確認のための吸引確認センサを設けたことを特徴とする。
【発明の効果】
【0014】
請求項1に係わる本発明は、PETボトル等の容器を把持する把持装置を円周等分に備えた回転円板の回転によって前記容器を搬送中に、前記把持装置と同期して回転し、前記容器に対応した位置で前記容器に対して昇降して、前記容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルを備えた容器リンサのリンス方法において、前記洗浄ノズルの前記容器への昇降量を容器高さの種類に対応して変更するようにしたことにより、容器高さの種類が変わっても、比重が小さて容器の内面への吹き付け力が小さいエア等の気体噴射でも容器の中の内面に付着している微粒子などの物質を内面から完全に剥がし取るができるという効果を有する。
【0015】
請求項2に係わる本発明は、PETボトル等の容器を把持する把持装置を円周等分に備えた回転円板の回転により前記容器を搬送する搬送装置と、該搬送装置により前記容器を搬送中に前記把持装置と同期して回転し、前記容器に対応した位置で前記容器に対して昇降して前記容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルと、上流から搬送されてくる前記容器を前記把持装置に受渡し供給する受渡し供給装置と、前記容器を前記把持装置から受渡し排出する受渡し排出装置を備えた容器リンサにおいて、前記容器高さの種類に対応して、前記洗浄ノズルの昇降量を自動的に変更できるように構成した洗浄ノズル昇降量自動変更装置を備えたことにより、高さが異なる容器に対しての洗浄ノズル昇降量変更の型替えを、長時間容器リンサを停止して行うことなく、容易かつ自動的に行うことができるという効果を有する。
【0016】
請求項3に係わる本発明は、前記請求項2に記載する容器リンサにおいて、前記洗浄ノズル昇降量自動変更装置を、前記洗浄ノズルに取り付けられたローラと、該ローラに係合する円周カムを設け、該円周カムが円周の一端側を支点として、他端側を制御装置からの指令で作動するアクチュエータによって昇降させることにより、カムリフト量を変更できるように構成したことにより、洗浄ノズル昇降量の変更を自動的に行うことができるという効果を有する。
【0017】
請求項4に係わる本発明は、前記請求項2から3に記載する容器リンサにおいて、前記洗浄ノズルに容器内のリンス後の気体を吸引する吸引ノズルを付設したことにより、容器内のリンスで汚れた気体を容器内から容易に排除することができて、リンス効果が増大するという効果を有する。
【0018】
請求項5に係わる本発明は、前記請求項2から4に記載する容器リンサにおいて、前記容器のリンス工程の前に、前記容器に付着している帯電性微粒子を前記容器から予め浮遊しやすくさせるための除電装置を設けたことにより、前記洗浄ノズルからの気体の噴射により容器に付着していた微粒子を容易に剥離して排除でき、リンス効果が増大するという効果を有する。
【0019】
請求項6に係わる本発明は、前記請求項2から5に記載する容器リンサにおいて、前記洗浄ノズルが前記受渡し排出の位置から受渡し供給の位置まで回転移動する途中の位置に、前記洗浄ノズルの気体噴射機能確認のための噴射確認センサを設けたことにより、該洗浄ノズルの気体噴射機能を確認できて、安全な容器リンサを提供できるという効果を有する。
【0020】
請求項7に係わる本発明は、前記請求項2から6に記載する容器リンサにおいて、前記洗浄ノズルが前記受渡し排出の位置から受渡し供給の位置まで回転移動する途中の位置に、前記吸引ノズルの容器内リンス後の気体吸引機能確認のための吸引確認センサを設けたことにより、前記吸引ノズルの容器内リンス後の気体吸引機能を確認できて、安全な容器リンサを提供できるという効果を有する。
【図面の簡単な説明】
【0021】
【図1】本発明の実施の形態に係わる容器リンサを摸式的に示した平面図である。
【図2】図1のA−A断面図である。
【図3】図2のB−B断面図である。
【図4】円周カムのカム軌跡を説明する図である。
【図5】洗浄ノズルの部分詳細断面図である。
【図6】別形態の洗浄ノズルの部分詳細断面図で、図5に相当する図である。
【発明を実施するための形態】
【0022】
以下、この発明の実施の形態につき図面を参照しつつ詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。また、下記実施の形態における構成要素には、当業者が容易に想定できるもの、あるいは実質的に同一のものが含まれる。
(発明の第1の実施の形態)
【0023】
本発明の第1の実施の形態を図1から図6に基づいて説明する。
図1は、本発明に係わる実施の形態の容器リンサを摸式的に示した平面図である。
図2は、図1のA−A断面図である。
図3は、図2のB−B断面図である。
図4は、円周カムのカム軌跡を説明する図である。
図5は、洗浄ノズルの部分詳細断面図である。
図6は、別形態の洗浄ノズルの部分詳細断面図で、図5に相当する図である。
【0024】
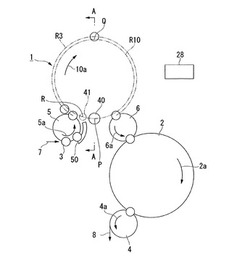
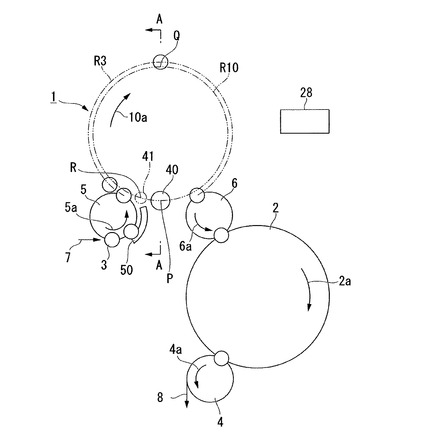
図において、容器リンサ1は、倒立した状態でPETボトル等の容器3を把持する把持装置15を円周等分に備えた回転円板14の回転により前記容器3を図示二点鎖線R3に沿って搬送する搬送装置13と、該搬送装置13により前記容器3を搬送中に前記把持装置15と同期して回転し、前記容器3に対応した位置で前記容器3に対して昇降して前記容器3をエア等の気体噴射によりリンスする昇降式の洗浄ノズル16と、上流から矢印7の方向へ搬送されてくる容器3を図示しない容器把持具で把持して、前記把持装置15へ受け渡し供給する受渡し供給装置5と、前記リンス後の容器3を前記把持装置15から図示しない容器把持具で把持して、後工程の電子線殺菌装置2へ受渡し排出する受渡し排出装置6と、前記洗浄ノズル16の昇降量を自動的に変更する洗浄ノズル昇降量自動変更装置20によって主に構成されており、前記搬送装置13は図示しない駆動装置により回転する回転軸14sとともに矢印10aの方向へ、前記受渡し供給装置5は矢印5aの方向へ、前記受渡し排出装置6は矢印6aの方向へ互いに同期して回転するようになっている。
【0025】
なお、前記容器3は、前記受渡し排出装置6から前記電子線殺菌装置2へ図示しない容器把持具で把持されて受け渡された後、前記電子線殺菌装置2の図示しない搬送装置で矢印2aの方向に搬送されている間に、図示しない電子線照射装置からの電子線照射を受けて殺菌され、受渡し装置4を経由して図示8の方向へ搬送されるようになっている。
ここで、前記電子線殺菌装置2は、前記受渡し排出装置6と同期して回転されるようになっているとともに、搬送装置4は前記電子線殺菌装置2と同期して矢印4aの方向へ回転されるようになっている。
また、前記電子線殺菌装置2については、特開2007−29709号の特許文献等に記載されている構造と類似しているので、ここでは詳細な説明は省略する。
【0026】
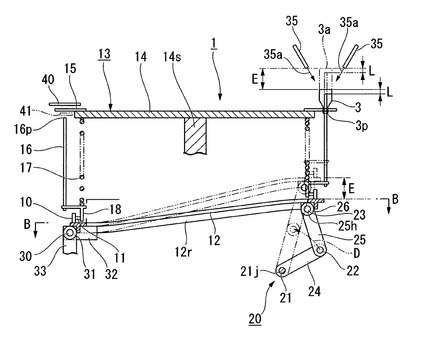
前記洗浄ノズル16は、前記把持装置15に対応した位置に円周等分に配置されてブラケット18に取り付けられ、該ブラケット18が前記回転円板14の下面との間に懸架されたばね17により下方へ付勢されているとともに、該ブラケット18に取り付けられた軸11の周りを回転するローラ10が円周カム12と係合して、前記ローラ10が図示二点鎖線R10に沿って矢印10aの方向に移動していくと、図示しないガイドに沿って上下方向に昇降されるようになっている。なお、前記円周カム12はリブ12rを有している。
【0027】
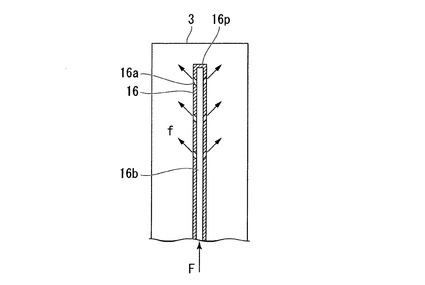
また、前記洗浄ノズル16は、その内孔16bが図示しない圧縮気体供給配管系統に接続されて矢印Fの方向に気体を供給され、ノズル穴16aから矢印fの方向へ気体を噴射するようになっている。
ここで、ノズル穴16aからの気体噴射は制御装置28からの指令により必要な時に噴射されるようになっている。
なお、図においては、ノズル穴16aは複数個設けた場合を示している。
【0028】
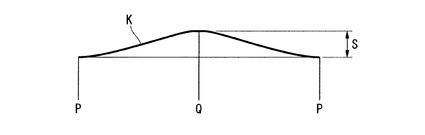
前記円周カム12は、図4に示すように、図示Pの位置ではカムリフトが最下端となり、図示Qの位置ではストロークSの最上端となるようなカム軌跡Kを有しており、前記洗浄ノズル16の先端16pが図示Pの位置では容器3の口部3pに相当する高さから外方へ外れた高さとなっており、図示Qの位置では容器3の内部の所定高さまで挿入されるようになっている。
【0029】
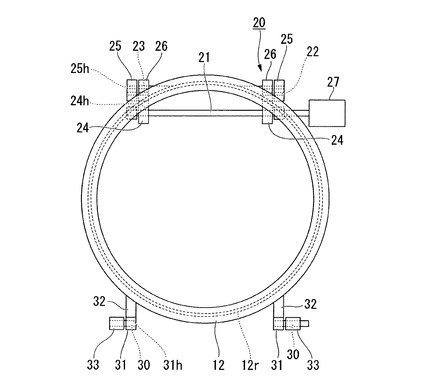
前記洗浄ノズル昇降量自動変更装置20は、図示しない固定のフレームに取り付けられた支持台33の軸30を支点として、前記円周カム12のP側の一端側で前記円周カム12と一体になった一対のアーム32に設けたボス31の穴31hを介して、前記円周カム12が揺動できるようになっているとともに、前記円周カム12のQ側の他端側で前記円周カム12と一体になった一対のボス26に設けた穴に固定された軸23の周りをその一端に設けた穴25hを介して揺動回転する一対のレバー25、該レバー25の他端に設けた軸22の周りをその一端に設けた穴24hを介して揺動回転する一対のレバー24、該レバー24の他端に設けた穴24jに固定された軸21および該軸21を揺動回転させるアクチュエータ27により構成されている。
なお、アクチュエータ27は制御装置28の指令により作動するようになっている。
【0030】
また、容器3の外周面は複数の洗浄ノズル35から矢印35aの方向へ噴射される気体によってリンスされるようになっている。
ここでは複数の洗浄ノズル35が図示しないフレームに固定されている場合を示しており、複数の洗浄ノズル35を、前記洗浄ノズル16と同様に、昇降式とすることもできるが、詳細な説明は省略する。
なお、洗浄ノズル16または洗浄ノズル35から気体を噴射するタイミング、時間は制御装置28により制御されるようになっている。
【0031】
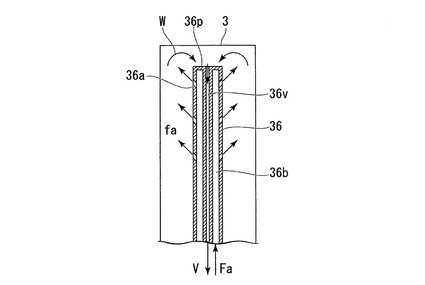
容器3の中に挿入する洗浄ノズルは、上記説明では、気体噴射用だけの洗浄ノズル16とした場合について説明したが、別形態の洗浄ノズル36として気体を噴射するとともに、容器3内をリンスした後の気体を吸引する吸引ノズルを付設した場合としてもよい。
洗浄ノズル36は、二重管になっていて、外管36bは先端36pで塞がれた構造で、エア等の気体が矢印Faの方向から供給され、外管36bの外周側には気体を矢印faの方向に噴射するノズル穴36aを複数個有しており、内管36v(吸引ノズル)は先端36pで外部へ突き抜けた構造で、矢印vvのように、前記矢印faの方向に噴射されて容器3の内面をリンスした後の気体が吸引されて矢印Vの方向へ真空引きされるようになっている。
なお、噴射するノズル穴36aから気体を噴射するタイミング、時間、および、内管36vからリンス後の気体を吸引するタイミング、時間は制御装置28により制御されるようになっている。
【0032】
また、受渡し供給装置5の搬送経路の外周側には、容器3に付着している帯電性の微粒子を容器3から浮遊しやすくさせるための除電装置50が備えられている。
ここでは、除電装置50は容器3に除電ブラシを接触させて容器3の帯電を除去する構造としているが、これに限らずイオンを容器3に当てて容器3の帯電を除去する等の構成としてもよい。
【0033】
さらに、把持装置15が受渡し排出装置6に容器3を受け渡した後、搬送装置13により回転移動して受渡し供給装置5で供給されてくる容器3を受け渡されるまでの途中の図示Pの位置で、洗浄ノズル16の先端16pまたは洗浄ノズル36の先端36pに近接した位置で、洗浄ノズル16または洗浄ノズル36からの気体噴射が確実に行われていることを確認するための噴射確認センサ40が設けられている。
該噴射確認センサ40は、洗浄ノズル16または洗浄ノズル36から噴射される気体の噴射圧によって、図示しないダイヤフラムの中心が移動することによりセンサが作動するようになっているが、詳細な説明は省略する。
なお、噴射確認センサ40での噴射確認タイミングは制御装置28により制御されるようになっている。
【0034】
また、洗浄ノズル36を使用する場合においては、把持装置15が受渡し排出装置6に容器3を受け渡した後、搬送装置13により回転移動して受渡し供給装置5で供給されてくる容器3を受け渡されるまでの途中の図示Rの位置で内管36vからリンス後の気体の吸引が確実に行われていることを確認するための吸引確認センサ41が設けられており、該吸引確認センサ41での吸引確認タイミングは制御装置28により制御されるようになっている。
なお、前記吸引確認センサ41は、洗浄ノズル36の内管36vから吸引されるリンス後の気体の吸引圧によって、図示しないダイヤフラムの中心が移動することによりセンサが作動するようになっているが、詳細な説明は省略する。
【0035】
次に、本発明の実施の形態に係わる容器リンサ1の作用を説明する。
受渡し供給装置5から把持装置15へ受け渡された容器3は、搬送装置13の回転により矢印10aの方向へ搬送される間に、前記把持装置15に対応して回転する洗浄ノズル16が、ばね17によって下方へ付勢されたブラケット18、軸11を介してローラ10が円周カム12に係合してカム軌跡Kに沿って上昇して、容器3内へ所定量挿入され、前記洗浄ノズル16のノズル穴16a、および、前記洗浄ノズル35から噴射される気体によって、内面および外面がリンスされ、容器3を後工程の電子線殺菌装置2で電子線照射により殺菌する際に、容器3の表面に付着している微粒子がリンスにより除去されて、電子線殺菌装置2による容器3の殺菌が確保される。
ここで、前記洗浄ノズル16の先端16pの容器3内への挿入量は、カム軌跡Kによって、図示のように、容器3の底部からLだけ下方の位置となるようになっている。
【0036】
容器3の容器高さが図示二点鎖線の容器3aのように高さEだけ大きくなった型替えの場合には、図示しない操作盤での操作により、制御装置28から指令が出されて、洗浄ノズル昇降量自動変更装置20のアクチュエータ27が作動し、軸21の揺動回転に伴ってレバー24が矢印Dの方向に揺動回転して、軸22、レバー25、軸23、アーム26を介して図示二点鎖線のように円周カム12が軸30を支点として位置Q側が高さEだけ上昇する。(図示では容器3aが容器高さとして最高の場合を示している。)
これにより前記洗浄ノズル16の先端16pは、位置Q側で自動的に容器3aの底部からLだけ下方の位置に設定されて、洗浄ノズル16の昇降量が容器3の場合と対比してEだけ増加する。
【0037】
従来は容器3から容器3aへの型替え時に人手によって洗浄ノズルの昇降量を設定し直していたが、上記説明のように、本発明によれば操作盤への指示で自動的に洗浄ノズル16の昇降量変更即ちカムリフト量変更ができる。
【0038】
洗浄ノズ36を使用する場合には、搬送装置13で容器3が搬送されている間に、洗浄ノズル36のノズル穴36aから気体が噴射されて容器3の内面がリンスされ、リンス後の気体は内管36vのノズル先端36p部から矢印vvのように吸引されて、矢印Vの方向に真空引きされていく。
これにより容器3内のリンス効果が増大して、容器3を後工程の電子線殺菌装置2で電子線照射により殺菌する際に、容器3の表面に付着している微粒子の除去作用が増大されて、電子線殺菌装置2による容器3の殺菌効果が増大される。
【0039】
さらに、容器3が洗浄ノズル36から気体を噴射される前に、除電装置50により容器3の帯電を除去されて、容器3に付着していた微粒子が前記容器3から浮遊しやすくなるので、洗浄ノズル36によるリンス効果がさらに増大して、電子線殺菌装置2による容器3の殺菌効果がさらに増大される。
【0040】
洗浄ノズル16または洗浄ノズル36が噴射確認センサ40に近接した際に、洗浄ノズル16または洗浄ノズル36から噴射される気体の噴射圧を検知して、洗浄ノズル16または洗浄ノズル36から正常に気体が噴射されるようになっていることを確認し、異常の場合には制御装置28に信号を送って、異常情報を出すことができる。
これにより洗浄ノズル16または洗浄ノズル36からの気体噴射による容器3の内面のリンスが確実に行われていることを確認できる。
【0041】
なお、洗浄ノズル36を使用する場合においては、洗浄ノズル36が吸引確認センサ41に近接した際に、洗浄ノズル36の内管36vからの気体の吸引を検知して、洗浄ノズル36の内管36vから正常にリンス後の気体を吸引されるようになっていることを確認し、異常の場合には制御装置28に信号を送って、異常情報を出すことができる。
これにより洗浄ノズル36の内管36vによる容器3内のリンス後の気体の吸引が確実に行われていることを確認できる。
【0042】
上記説明では、容器リンサを、容器を電子線照射により殺菌する電子線殺菌装置の前工程に設ける場合について説明したが、容器リンサを、容器の表面を成膜処理する成膜装置の後工程に設ける場合についても、その作用、効果は同様であるので、詳細な説明は省略する。
【符号の説明】
【0043】
1 容器リンサ
2 電子線殺菌装置
3 容器
5 受渡し供給装置
6 受渡し排出装置
10 ローラ
12 円周カム
13 搬送装置
14 回転円板
15 把持装置
16、36 洗浄ノズル
16a、36a (噴射)ノズル穴
17 ばね
18 ブラケット
20 洗浄ノズル昇降量自動変更装置
21、22、23、30 軸
24、25 レバー
27 アクチュエータ
28 制御装置
36v 内管(吸引ノズル)
40 噴射確認センサ
41 吸引確認センサ
50 除電装置
【技術分野】
【0001】
本発明は、飲料を充填するPETボトル等の容器を電子線殺菌装置で殺菌する前工程、或いは、PETボトル等の容器の表面を成膜装置で成膜処理した後工程等において、洗浄ノズルからの気体噴射により容器に付着している微粒子等を除去する容器リンサに関する。
【背景技術】
【0002】
PETボトル等の容器内外面を洗浄ノズルからのリンス水等の噴射により洗浄する容器リンサは公知技術となっている。(特許文献1)
また、PETボトル等の容器の表面を成膜装置で成膜処理した後工程において、ノズルからのエア吹付けにより容器の中の内面に付着している除去対象物質をその内面から剥がし取る容器清浄装置が公知技術となっている。(特許文献2)
近年、PETボトル等の容器を電子線殺菌装置で殺菌すること、或いは、PETボトル等の容器の表面を成膜装置で成膜処理することが行われるようになってきているが、前記容器を電子線で殺菌する殺菌効率を上げるために、前工程でリンスして容器に付着している微粒子等を高い除去率で除去すること、或いは、成膜処理した容器表面の付着物を後工程でリンスして高い除去率で除去することが求められている。また、対象とする容器の種類が多様化されつつあり、複数の容器高さに対しては、容器高さに対応する型替えに際して、その都度容器リンサを長時間停止して型替えを行っているため、この型替えにより生産ラインの生産性が悪くなっていることから、複数の容器高さに対する型替えの簡素化が叫ばれている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−90377号公報(図2、図4)
【特許文献2】特開2004−8976号公報(図6〜図10)
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記特許文献1によれば、容器洗浄装置は、昇降可能な洗浄ノズルから洗浄液を噴射して、倒立した容器の外周面を洗浄するとしている。
しかしながら、前記特許文献1の技術では、倒立した容器の外周面を洗浄液で洗浄する技術についてのみ開示しているが、倒立した容器の内面を洗浄する洗浄ノズルの昇降についての技術は開示されておらず、また、倒立した容器を電子線殺菌装置で殺菌する前工程等において、容器に付着している微粒子を気体噴射によりドライ状態でリンスする技術についても開示されていない。
【0005】
前記特許文献2によれば、成膜装置の後工程の清浄化装置は、倒立した容器の口から中へノズルを挿入してノズルから空気を吐出し、容器の中の内面に付着している炭素微粒子などの物質を内面から剥がし取り、吐出された空気を吸引することにより付着物質の再付着が抑止されるとしている。
しかしながら、前記特許文献2の技術では、容器高さが変わる場合のことが言及されていない。即ち、ノズルから吐出される空気は比重が小さいことにより、比重が大きい水のような液体の場合と違って、容器の内面への吹き付け力が小さく、容器の中の内面に付着している炭素微粒子などの物質を内面から完全に剥がし取るためには、ノズル位置を容器に近い状態にする必要があり、容器高さが変わる場合にはノズルの容器の中への挿入量を容器の高さに合わせて変えることが要求されるが、前記特許文献2の技術では、ノズルの容器の中への挿入量を容器高さに対応して変えるという技術、また、ノズルの容器の中への挿入量を自動的に変えるという技術については開示されていない。
【0006】
本発明は、PETボトル等の容器を電子線殺菌装置で殺菌する前工程、或いは、PETボトル等の容器の表面を成膜装置で成膜処理する後工程等において、容器に付着している微粒子を洗浄ノズルから水等の液体ではなくてエア等の気体噴射により高い除去率で除去することが求められているロータリー式容器リンサにおいて、前記洗浄ノズルの前記容器内への昇降量を容器高さに対応する等微粒子の除去率を高めるとともに、容器高さの種類が変わった場合に容器高さに対応して洗浄ノズル昇降量変更の型替えを簡単な操作で行える洗浄ノズル昇降量自動変更装置を備えた容器リンサを提供することを目的としている。
【課題を解決するための手段】
【0007】
前記の課題に対し、本発明は以下の手段により解決を図る。
(1)第1の手段の容器リンサのリンス方法は、PETボトル等の容器を把持する把持装置を円周等分に備えた回転円板の回転によって前記容器を搬送中に、前記把持装置と同期して回転し、前記容器に対応した位置で前記容器に対して昇降して、前記容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルを備えた容器リンサのリンス方法において、前記洗浄ノズルの前記容器への昇降量を容器高さの種類に対応して変更するようにしたことを特徴とする。
【0008】
(2)第2の手段の容器リンサは、PETボトル等の容器を把持する把持装置を円周等分に備えた回転円板の回転により前記容器を搬送する搬送装置と、該搬送装置により前記容器を搬送中に前記把持装置と同期して回転し、前記容器に対応した位置で前記容器に対して昇降して前記容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルと、上流から搬送されてくる前記容器を前記把持装置に受渡し供給する受渡し供給装置と、前記容器を前記把持装置から受渡し排出する受渡し排出装置を備えた容器リンサにおいて、前記容器高さの種類に対応して、前記洗浄ノズルの昇降量を自動的に変更できるように構成した洗浄ノズル昇降量自動変更装置を備えたことを特徴とする。
【0009】
(3)第3の手段の容器リンサは、前記第2の手段の容器リンサにおいて、前記洗浄ノズル昇降量自動変更装置を、前記洗浄ノズルに取り付けられたローラと、該ローラに係合する円周カムを設け、該円周カムが円周の一端側を支点として、他端側を制御装置からの指令で作動するアクチュエータによって昇降させることにより、カムリフト量を変更できるように構成したことを特徴とする。
【0010】
(4)第4の手段の容器リンサは、前記第2および第3の手段の容器リンサにおいて、前記洗浄ノズルに容器内のリンス後の気体を吸引する吸引ノズルを付設したことを特徴とする。
【0011】
(5)第5の手段の容器リンサは、前記第2から第4の手段の容器リンサにおいて、前記容器のリンス工程の前に、前記容器に付着している帯電性微粒子を前記容器から予め浮遊しやすくさせるための除電装置を設けたことを特徴とする。
【0012】
(6)第6の手段の容器リンサは、前記第2から第5の手段の容器リンサにおいて、前記洗浄ノズルが前記受渡し排出の位置から受渡し供給の位置まで回転移動する途中の位置に、前記洗浄ノズルの気体噴射機能確認のための噴射確認センサを設けたことを特徴とする。
【0013】
(7)第7の手段の容器リンサは、前記第2から第6の手段の容器リンサにおいて、前記洗浄ノズルが前記受渡し排出の位置から受渡し供給の位置まで回転移動する途中の位置に、前記吸引ノズルの容器内リンス後の気体吸引機能確認のための吸引確認センサを設けたことを特徴とする。
【発明の効果】
【0014】
請求項1に係わる本発明は、PETボトル等の容器を把持する把持装置を円周等分に備えた回転円板の回転によって前記容器を搬送中に、前記把持装置と同期して回転し、前記容器に対応した位置で前記容器に対して昇降して、前記容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルを備えた容器リンサのリンス方法において、前記洗浄ノズルの前記容器への昇降量を容器高さの種類に対応して変更するようにしたことにより、容器高さの種類が変わっても、比重が小さて容器の内面への吹き付け力が小さいエア等の気体噴射でも容器の中の内面に付着している微粒子などの物質を内面から完全に剥がし取るができるという効果を有する。
【0015】
請求項2に係わる本発明は、PETボトル等の容器を把持する把持装置を円周等分に備えた回転円板の回転により前記容器を搬送する搬送装置と、該搬送装置により前記容器を搬送中に前記把持装置と同期して回転し、前記容器に対応した位置で前記容器に対して昇降して前記容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルと、上流から搬送されてくる前記容器を前記把持装置に受渡し供給する受渡し供給装置と、前記容器を前記把持装置から受渡し排出する受渡し排出装置を備えた容器リンサにおいて、前記容器高さの種類に対応して、前記洗浄ノズルの昇降量を自動的に変更できるように構成した洗浄ノズル昇降量自動変更装置を備えたことにより、高さが異なる容器に対しての洗浄ノズル昇降量変更の型替えを、長時間容器リンサを停止して行うことなく、容易かつ自動的に行うことができるという効果を有する。
【0016】
請求項3に係わる本発明は、前記請求項2に記載する容器リンサにおいて、前記洗浄ノズル昇降量自動変更装置を、前記洗浄ノズルに取り付けられたローラと、該ローラに係合する円周カムを設け、該円周カムが円周の一端側を支点として、他端側を制御装置からの指令で作動するアクチュエータによって昇降させることにより、カムリフト量を変更できるように構成したことにより、洗浄ノズル昇降量の変更を自動的に行うことができるという効果を有する。
【0017】
請求項4に係わる本発明は、前記請求項2から3に記載する容器リンサにおいて、前記洗浄ノズルに容器内のリンス後の気体を吸引する吸引ノズルを付設したことにより、容器内のリンスで汚れた気体を容器内から容易に排除することができて、リンス効果が増大するという効果を有する。
【0018】
請求項5に係わる本発明は、前記請求項2から4に記載する容器リンサにおいて、前記容器のリンス工程の前に、前記容器に付着している帯電性微粒子を前記容器から予め浮遊しやすくさせるための除電装置を設けたことにより、前記洗浄ノズルからの気体の噴射により容器に付着していた微粒子を容易に剥離して排除でき、リンス効果が増大するという効果を有する。
【0019】
請求項6に係わる本発明は、前記請求項2から5に記載する容器リンサにおいて、前記洗浄ノズルが前記受渡し排出の位置から受渡し供給の位置まで回転移動する途中の位置に、前記洗浄ノズルの気体噴射機能確認のための噴射確認センサを設けたことにより、該洗浄ノズルの気体噴射機能を確認できて、安全な容器リンサを提供できるという効果を有する。
【0020】
請求項7に係わる本発明は、前記請求項2から6に記載する容器リンサにおいて、前記洗浄ノズルが前記受渡し排出の位置から受渡し供給の位置まで回転移動する途中の位置に、前記吸引ノズルの容器内リンス後の気体吸引機能確認のための吸引確認センサを設けたことにより、前記吸引ノズルの容器内リンス後の気体吸引機能を確認できて、安全な容器リンサを提供できるという効果を有する。
【図面の簡単な説明】
【0021】
【図1】本発明の実施の形態に係わる容器リンサを摸式的に示した平面図である。
【図2】図1のA−A断面図である。
【図3】図2のB−B断面図である。
【図4】円周カムのカム軌跡を説明する図である。
【図5】洗浄ノズルの部分詳細断面図である。
【図6】別形態の洗浄ノズルの部分詳細断面図で、図5に相当する図である。
【発明を実施するための形態】
【0022】
以下、この発明の実施の形態につき図面を参照しつつ詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。また、下記実施の形態における構成要素には、当業者が容易に想定できるもの、あるいは実質的に同一のものが含まれる。
(発明の第1の実施の形態)
【0023】
本発明の第1の実施の形態を図1から図6に基づいて説明する。
図1は、本発明に係わる実施の形態の容器リンサを摸式的に示した平面図である。
図2は、図1のA−A断面図である。
図3は、図2のB−B断面図である。
図4は、円周カムのカム軌跡を説明する図である。
図5は、洗浄ノズルの部分詳細断面図である。
図6は、別形態の洗浄ノズルの部分詳細断面図で、図5に相当する図である。
【0024】
図において、容器リンサ1は、倒立した状態でPETボトル等の容器3を把持する把持装置15を円周等分に備えた回転円板14の回転により前記容器3を図示二点鎖線R3に沿って搬送する搬送装置13と、該搬送装置13により前記容器3を搬送中に前記把持装置15と同期して回転し、前記容器3に対応した位置で前記容器3に対して昇降して前記容器3をエア等の気体噴射によりリンスする昇降式の洗浄ノズル16と、上流から矢印7の方向へ搬送されてくる容器3を図示しない容器把持具で把持して、前記把持装置15へ受け渡し供給する受渡し供給装置5と、前記リンス後の容器3を前記把持装置15から図示しない容器把持具で把持して、後工程の電子線殺菌装置2へ受渡し排出する受渡し排出装置6と、前記洗浄ノズル16の昇降量を自動的に変更する洗浄ノズル昇降量自動変更装置20によって主に構成されており、前記搬送装置13は図示しない駆動装置により回転する回転軸14sとともに矢印10aの方向へ、前記受渡し供給装置5は矢印5aの方向へ、前記受渡し排出装置6は矢印6aの方向へ互いに同期して回転するようになっている。
【0025】
なお、前記容器3は、前記受渡し排出装置6から前記電子線殺菌装置2へ図示しない容器把持具で把持されて受け渡された後、前記電子線殺菌装置2の図示しない搬送装置で矢印2aの方向に搬送されている間に、図示しない電子線照射装置からの電子線照射を受けて殺菌され、受渡し装置4を経由して図示8の方向へ搬送されるようになっている。
ここで、前記電子線殺菌装置2は、前記受渡し排出装置6と同期して回転されるようになっているとともに、搬送装置4は前記電子線殺菌装置2と同期して矢印4aの方向へ回転されるようになっている。
また、前記電子線殺菌装置2については、特開2007−29709号の特許文献等に記載されている構造と類似しているので、ここでは詳細な説明は省略する。
【0026】
前記洗浄ノズル16は、前記把持装置15に対応した位置に円周等分に配置されてブラケット18に取り付けられ、該ブラケット18が前記回転円板14の下面との間に懸架されたばね17により下方へ付勢されているとともに、該ブラケット18に取り付けられた軸11の周りを回転するローラ10が円周カム12と係合して、前記ローラ10が図示二点鎖線R10に沿って矢印10aの方向に移動していくと、図示しないガイドに沿って上下方向に昇降されるようになっている。なお、前記円周カム12はリブ12rを有している。
【0027】
また、前記洗浄ノズル16は、その内孔16bが図示しない圧縮気体供給配管系統に接続されて矢印Fの方向に気体を供給され、ノズル穴16aから矢印fの方向へ気体を噴射するようになっている。
ここで、ノズル穴16aからの気体噴射は制御装置28からの指令により必要な時に噴射されるようになっている。
なお、図においては、ノズル穴16aは複数個設けた場合を示している。
【0028】
前記円周カム12は、図4に示すように、図示Pの位置ではカムリフトが最下端となり、図示Qの位置ではストロークSの最上端となるようなカム軌跡Kを有しており、前記洗浄ノズル16の先端16pが図示Pの位置では容器3の口部3pに相当する高さから外方へ外れた高さとなっており、図示Qの位置では容器3の内部の所定高さまで挿入されるようになっている。
【0029】
前記洗浄ノズル昇降量自動変更装置20は、図示しない固定のフレームに取り付けられた支持台33の軸30を支点として、前記円周カム12のP側の一端側で前記円周カム12と一体になった一対のアーム32に設けたボス31の穴31hを介して、前記円周カム12が揺動できるようになっているとともに、前記円周カム12のQ側の他端側で前記円周カム12と一体になった一対のボス26に設けた穴に固定された軸23の周りをその一端に設けた穴25hを介して揺動回転する一対のレバー25、該レバー25の他端に設けた軸22の周りをその一端に設けた穴24hを介して揺動回転する一対のレバー24、該レバー24の他端に設けた穴24jに固定された軸21および該軸21を揺動回転させるアクチュエータ27により構成されている。
なお、アクチュエータ27は制御装置28の指令により作動するようになっている。
【0030】
また、容器3の外周面は複数の洗浄ノズル35から矢印35aの方向へ噴射される気体によってリンスされるようになっている。
ここでは複数の洗浄ノズル35が図示しないフレームに固定されている場合を示しており、複数の洗浄ノズル35を、前記洗浄ノズル16と同様に、昇降式とすることもできるが、詳細な説明は省略する。
なお、洗浄ノズル16または洗浄ノズル35から気体を噴射するタイミング、時間は制御装置28により制御されるようになっている。
【0031】
容器3の中に挿入する洗浄ノズルは、上記説明では、気体噴射用だけの洗浄ノズル16とした場合について説明したが、別形態の洗浄ノズル36として気体を噴射するとともに、容器3内をリンスした後の気体を吸引する吸引ノズルを付設した場合としてもよい。
洗浄ノズル36は、二重管になっていて、外管36bは先端36pで塞がれた構造で、エア等の気体が矢印Faの方向から供給され、外管36bの外周側には気体を矢印faの方向に噴射するノズル穴36aを複数個有しており、内管36v(吸引ノズル)は先端36pで外部へ突き抜けた構造で、矢印vvのように、前記矢印faの方向に噴射されて容器3の内面をリンスした後の気体が吸引されて矢印Vの方向へ真空引きされるようになっている。
なお、噴射するノズル穴36aから気体を噴射するタイミング、時間、および、内管36vからリンス後の気体を吸引するタイミング、時間は制御装置28により制御されるようになっている。
【0032】
また、受渡し供給装置5の搬送経路の外周側には、容器3に付着している帯電性の微粒子を容器3から浮遊しやすくさせるための除電装置50が備えられている。
ここでは、除電装置50は容器3に除電ブラシを接触させて容器3の帯電を除去する構造としているが、これに限らずイオンを容器3に当てて容器3の帯電を除去する等の構成としてもよい。
【0033】
さらに、把持装置15が受渡し排出装置6に容器3を受け渡した後、搬送装置13により回転移動して受渡し供給装置5で供給されてくる容器3を受け渡されるまでの途中の図示Pの位置で、洗浄ノズル16の先端16pまたは洗浄ノズル36の先端36pに近接した位置で、洗浄ノズル16または洗浄ノズル36からの気体噴射が確実に行われていることを確認するための噴射確認センサ40が設けられている。
該噴射確認センサ40は、洗浄ノズル16または洗浄ノズル36から噴射される気体の噴射圧によって、図示しないダイヤフラムの中心が移動することによりセンサが作動するようになっているが、詳細な説明は省略する。
なお、噴射確認センサ40での噴射確認タイミングは制御装置28により制御されるようになっている。
【0034】
また、洗浄ノズル36を使用する場合においては、把持装置15が受渡し排出装置6に容器3を受け渡した後、搬送装置13により回転移動して受渡し供給装置5で供給されてくる容器3を受け渡されるまでの途中の図示Rの位置で内管36vからリンス後の気体の吸引が確実に行われていることを確認するための吸引確認センサ41が設けられており、該吸引確認センサ41での吸引確認タイミングは制御装置28により制御されるようになっている。
なお、前記吸引確認センサ41は、洗浄ノズル36の内管36vから吸引されるリンス後の気体の吸引圧によって、図示しないダイヤフラムの中心が移動することによりセンサが作動するようになっているが、詳細な説明は省略する。
【0035】
次に、本発明の実施の形態に係わる容器リンサ1の作用を説明する。
受渡し供給装置5から把持装置15へ受け渡された容器3は、搬送装置13の回転により矢印10aの方向へ搬送される間に、前記把持装置15に対応して回転する洗浄ノズル16が、ばね17によって下方へ付勢されたブラケット18、軸11を介してローラ10が円周カム12に係合してカム軌跡Kに沿って上昇して、容器3内へ所定量挿入され、前記洗浄ノズル16のノズル穴16a、および、前記洗浄ノズル35から噴射される気体によって、内面および外面がリンスされ、容器3を後工程の電子線殺菌装置2で電子線照射により殺菌する際に、容器3の表面に付着している微粒子がリンスにより除去されて、電子線殺菌装置2による容器3の殺菌が確保される。
ここで、前記洗浄ノズル16の先端16pの容器3内への挿入量は、カム軌跡Kによって、図示のように、容器3の底部からLだけ下方の位置となるようになっている。
【0036】
容器3の容器高さが図示二点鎖線の容器3aのように高さEだけ大きくなった型替えの場合には、図示しない操作盤での操作により、制御装置28から指令が出されて、洗浄ノズル昇降量自動変更装置20のアクチュエータ27が作動し、軸21の揺動回転に伴ってレバー24が矢印Dの方向に揺動回転して、軸22、レバー25、軸23、アーム26を介して図示二点鎖線のように円周カム12が軸30を支点として位置Q側が高さEだけ上昇する。(図示では容器3aが容器高さとして最高の場合を示している。)
これにより前記洗浄ノズル16の先端16pは、位置Q側で自動的に容器3aの底部からLだけ下方の位置に設定されて、洗浄ノズル16の昇降量が容器3の場合と対比してEだけ増加する。
【0037】
従来は容器3から容器3aへの型替え時に人手によって洗浄ノズルの昇降量を設定し直していたが、上記説明のように、本発明によれば操作盤への指示で自動的に洗浄ノズル16の昇降量変更即ちカムリフト量変更ができる。
【0038】
洗浄ノズ36を使用する場合には、搬送装置13で容器3が搬送されている間に、洗浄ノズル36のノズル穴36aから気体が噴射されて容器3の内面がリンスされ、リンス後の気体は内管36vのノズル先端36p部から矢印vvのように吸引されて、矢印Vの方向に真空引きされていく。
これにより容器3内のリンス効果が増大して、容器3を後工程の電子線殺菌装置2で電子線照射により殺菌する際に、容器3の表面に付着している微粒子の除去作用が増大されて、電子線殺菌装置2による容器3の殺菌効果が増大される。
【0039】
さらに、容器3が洗浄ノズル36から気体を噴射される前に、除電装置50により容器3の帯電を除去されて、容器3に付着していた微粒子が前記容器3から浮遊しやすくなるので、洗浄ノズル36によるリンス効果がさらに増大して、電子線殺菌装置2による容器3の殺菌効果がさらに増大される。
【0040】
洗浄ノズル16または洗浄ノズル36が噴射確認センサ40に近接した際に、洗浄ノズル16または洗浄ノズル36から噴射される気体の噴射圧を検知して、洗浄ノズル16または洗浄ノズル36から正常に気体が噴射されるようになっていることを確認し、異常の場合には制御装置28に信号を送って、異常情報を出すことができる。
これにより洗浄ノズル16または洗浄ノズル36からの気体噴射による容器3の内面のリンスが確実に行われていることを確認できる。
【0041】
なお、洗浄ノズル36を使用する場合においては、洗浄ノズル36が吸引確認センサ41に近接した際に、洗浄ノズル36の内管36vからの気体の吸引を検知して、洗浄ノズル36の内管36vから正常にリンス後の気体を吸引されるようになっていることを確認し、異常の場合には制御装置28に信号を送って、異常情報を出すことができる。
これにより洗浄ノズル36の内管36vによる容器3内のリンス後の気体の吸引が確実に行われていることを確認できる。
【0042】
上記説明では、容器リンサを、容器を電子線照射により殺菌する電子線殺菌装置の前工程に設ける場合について説明したが、容器リンサを、容器の表面を成膜処理する成膜装置の後工程に設ける場合についても、その作用、効果は同様であるので、詳細な説明は省略する。
【符号の説明】
【0043】
1 容器リンサ
2 電子線殺菌装置
3 容器
5 受渡し供給装置
6 受渡し排出装置
10 ローラ
12 円周カム
13 搬送装置
14 回転円板
15 把持装置
16、36 洗浄ノズル
16a、36a (噴射)ノズル穴
17 ばね
18 ブラケット
20 洗浄ノズル昇降量自動変更装置
21、22、23、30 軸
24、25 レバー
27 アクチュエータ
28 制御装置
36v 内管(吸引ノズル)
40 噴射確認センサ
41 吸引確認センサ
50 除電装置
【特許請求の範囲】
【請求項1】
PETボトル等の容器を把持する把持装置を円周等分に備えた回転円板の回転によって前記容器を搬送中に、前記把持装置と同期して回転し、前記容器に対応した位置で前記容器に対して昇降して、前記容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルを備えた容器リンサのリンス方法において、前記洗浄ノズルの前記容器への昇降量を容器高さの種類に対応して変更するようにしたことを特徴とする容器リンサのリンス方法。
【請求項2】
PETボトル等の容器を把持する把持装置を円周等分に備えた回転円板の回転により前記容器を搬送する搬送装置と、該搬送装置により前記容器を搬送中に前記把持装置と同期して回転し、前記容器に対応した位置で前記容器に対して昇降して前記容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルと、上流から搬送されてくる前記容器を前記把持装置に受渡し供給する受渡し供給装置と、前記容器を前記把持装置から受渡し排出する受渡し排出装置を備えた容器リンサにおいて、前記容器高さの種類に対応して、前記洗浄ノズルの昇降量を自動的に変更できるように構成した洗浄ノズル昇降量自動変更装置を備えたことを特徴とする容器リンサ。
【請求項3】
請求項2に記載する容器リンサにおいて、前記洗浄ノズル昇降量自動変更装置を、前記洗浄ノズルに取り付けられたローラと、該ローラに係合する円周カムを設け、該円周カムが円周の一端側を支点として、他端側を制御装置からの指令で作動するアクチュエータによって昇降させることにより、カムリフト量を変更できるように構成したことを特徴とする容器リンサ。
【請求項4】
請求項2又は3に記載する容器リンサにおいて、前記洗浄ノズルに容器内のリンス後の気体を吸引する吸引ノズルを付設したことを特徴とする容器リンサ。
【請求項5】
請求項2から4のいずれか1項に記載する容器リンサにおいて、前記容器のリンス工程の前に、前記容器に付着している帯電性微粒子を前記容器から予め浮遊しやすくさせるための除電装置を設けたことを特徴とする容器リンサ。
【請求項6】
請求項2から5のいずれか1項に記載する容器リンサにおいて、前記洗浄ノズルが前記受渡し排出の位置から受渡し供給の位置まで回転移動する途中の位置に、前記洗浄ノズルの気体噴射機能確認のための噴射確認センサを設けたことを特徴とする容器リンサ。
【請求項7】
請求項2から6のいずれか1項に記載する容器リンサにおいて、前記洗浄ノズルが前記受渡し排出の位置から受渡し供給の位置まで回転移動する途中の位置に、前記吸引ノズルの容器内リンス後の気体吸引機能確認のための吸引確認センサを設けたことを特徴とする容器リンサ。
【請求項1】
PETボトル等の容器を把持する把持装置を円周等分に備えた回転円板の回転によって前記容器を搬送中に、前記把持装置と同期して回転し、前記容器に対応した位置で前記容器に対して昇降して、前記容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルを備えた容器リンサのリンス方法において、前記洗浄ノズルの前記容器への昇降量を容器高さの種類に対応して変更するようにしたことを特徴とする容器リンサのリンス方法。
【請求項2】
PETボトル等の容器を把持する把持装置を円周等分に備えた回転円板の回転により前記容器を搬送する搬送装置と、該搬送装置により前記容器を搬送中に前記把持装置と同期して回転し、前記容器に対応した位置で前記容器に対して昇降して前記容器をエア等の気体噴射によりリンスする昇降式の洗浄ノズルと、上流から搬送されてくる前記容器を前記把持装置に受渡し供給する受渡し供給装置と、前記容器を前記把持装置から受渡し排出する受渡し排出装置を備えた容器リンサにおいて、前記容器高さの種類に対応して、前記洗浄ノズルの昇降量を自動的に変更できるように構成した洗浄ノズル昇降量自動変更装置を備えたことを特徴とする容器リンサ。
【請求項3】
請求項2に記載する容器リンサにおいて、前記洗浄ノズル昇降量自動変更装置を、前記洗浄ノズルに取り付けられたローラと、該ローラに係合する円周カムを設け、該円周カムが円周の一端側を支点として、他端側を制御装置からの指令で作動するアクチュエータによって昇降させることにより、カムリフト量を変更できるように構成したことを特徴とする容器リンサ。
【請求項4】
請求項2又は3に記載する容器リンサにおいて、前記洗浄ノズルに容器内のリンス後の気体を吸引する吸引ノズルを付設したことを特徴とする容器リンサ。
【請求項5】
請求項2から4のいずれか1項に記載する容器リンサにおいて、前記容器のリンス工程の前に、前記容器に付着している帯電性微粒子を前記容器から予め浮遊しやすくさせるための除電装置を設けたことを特徴とする容器リンサ。
【請求項6】
請求項2から5のいずれか1項に記載する容器リンサにおいて、前記洗浄ノズルが前記受渡し排出の位置から受渡し供給の位置まで回転移動する途中の位置に、前記洗浄ノズルの気体噴射機能確認のための噴射確認センサを設けたことを特徴とする容器リンサ。
【請求項7】
請求項2から6のいずれか1項に記載する容器リンサにおいて、前記洗浄ノズルが前記受渡し排出の位置から受渡し供給の位置まで回転移動する途中の位置に、前記吸引ノズルの容器内リンス後の気体吸引機能確認のための吸引確認センサを設けたことを特徴とする容器リンサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−246165(P2011−246165A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2010−121556(P2010−121556)
【出願日】平成22年5月27日(2010.5.27)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成22年5月27日(2010.5.27)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【Fターム(参考)】
[ Back to top ]