
容器保持装置
【課題】スターホイールから回転テーブルへの移送の際に、アーム及びアーム軸が障害とならず、簡単且つ丈夫な駆動機構で動作される容器保持装置を提供する。
【解決手段】 本発明は、容器台12上の保持領域12aに対して一方の側から搬入される壜BTを、保持領域12aの他方の側の受け部46bにて受け止めつつアーム19により保持領域12a内に抱え込む容器保持装置において、保持領域12aの周囲にて上下方向に延びるように配置されたアーム軸26と、アーム軸26を保持領域12aの周囲の第1の位置Pとそれよりも保持領域12aの他方の側に後退した第2の位置Qとの間で駆動するアーム駆動機構27と、を具備し、第1の位置Pにてアーム19の先端部が保持領域12aの一方の側に進出し、第2の位置Qにてアーム19の先端部が保持領域12aの他方の側に後退するようにしてアーム19をアーム軸26に取り付ける。
【解決手段】 本発明は、容器台12上の保持領域12aに対して一方の側から搬入される壜BTを、保持領域12aの他方の側の受け部46bにて受け止めつつアーム19により保持領域12a内に抱え込む容器保持装置において、保持領域12aの周囲にて上下方向に延びるように配置されたアーム軸26と、アーム軸26を保持領域12aの周囲の第1の位置Pとそれよりも保持領域12aの他方の側に後退した第2の位置Qとの間で駆動するアーム駆動機構27と、を具備し、第1の位置Pにてアーム19の先端部が保持領域12aの一方の側に進出し、第2の位置Qにてアーム19の先端部が保持領域12aの他方の側に後退するようにしてアーム19をアーム軸26に取り付ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送装置の容器台に載置された容器を支持する容器保持装置に関する。
【背景技術】
【0002】
従来、飲料等が充填される壜等の容器を搬送させながら傷の有無等を検査する検査装置が知られている。このような検査装置において容器は、搬入部からスターホイールに移送され、更にスターホイールから回転テーブルを備えた搬送装置に移送されて各種検査が行われる。
【0003】
このスターホイールで容器は、外周に設けられたポケットに保持されて回転テーブルまで搬送される。そしてスターホイールの外周側には、容器の外方への飛び出し等を防止するために上下2本の保持バーが設けられている。
【0004】
また、回転テーブルで容器は、当該回転テーブルの周縁部に等間隔で複数設けられた、当該回転テーブルに対して更に回転可能な容器台に搭載されて搬送される。この容器台の周囲には、容器の芯ずれ及び位相ずれを防止するために、容器の外周を支える容器保持装置が設けられている。
【0005】
この容器保持装置は、容器台に隣接して固定され、上下にローラを備えたアーム軸と、当該アーム軸から容器の外周に沿って湾曲して外方に延び且つアーム軸の回りを旋回し、先端にアームローラを備えているアームと、を具備する。そして、このアーム軸が固定されている容器台に隣接した位置は、回転テーブルの中心線の回りを容器台の中心を通る円を描いた場合の、その円周上であり、アーム軸の高さは容器の中央部まである。また、アーム軸は回転テーブルの下方にも延び、その下端には、駆動ブロック固定され、この駆動ブロックのアーム軸と異なる位置には、動作用ローラが挿通されたローラ軸が挿通されている。そして、この動作用ローラをアーム軸に対して回転させるための溝カムが回転テーブルの下に設けられ、動作用ローラは溝カムの内周に接するようにばねによって付勢されている。
【0006】
そして回転テーブルの回転に伴い、動作用ローラが溝カム内を移動し、容器の搬入及び搬出位置に来たときに変化する溝カムの形状によって動作用ローラが移動し、その移動によってアーム軸が回転テーブルに対して回転する。そして、アーム軸が回転するとアームが旋回し、容器に対してアームが開閉し、容器の保持動作が行われる(特許文献1参照)。
【特許文献1】特開2003−322235号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
スターホイールから回転テーブルへ容器が乗り移る際の安定した乗り移りのため容器は、回転テーブルの回転台に移送される直前まで、スターホイールの上述した上下の保持バーにより支持されていることが好ましい。しかし、従来の保持機構では、容器の中央部まで垂直に延びるアーム軸が、容器台の中心を通る円周上に設けられている。従って、下の保持バーを、容器台に乗り移る直前まで壜の側部を支持する位置まで延ばすことができない。故に容器は、乗り移る際に、上下の保持バーのうちの下の保持バーがなく、上の保持バーのみで保持された状態であり、乗り移りの際に傾き、倒れて破損する場合がある。そうすると容器の破片を除去するためにラインを停止しなくてならない。また、容器台や容器保持装置等の機械部品が破損してしまうこともある。乗り移りの際に容器はアームの先端部の極近傍を通過するため、乗り移りの際にこの先端部と容器とが接触し、アーム等の部品が曲がることがある。更に、アーム軸を回転させるために回転テーブルの下に設けられる溝カムは大掛かりな機構である。そして動作用ローラには常にばねによって負荷がかけられており、磨耗しやすいという欠点がある。
【0008】
そこで、本発明は、スターホイールから回転テーブルへの移送の際に、アーム軸及びアームが障害とならず、且つ簡単且つ丈夫な駆動機構で動作される容器保持装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、容器台(12)上の保持領域(12a)に対して該保持領域(12a)の一方の側から搬入される容器(BT)を、前記保持領域(12a)の他方の側に位置する受け部(46b)にて受け止めつつ前記保持領域(12a)を挟んで前記受け部(46b)と対向するアーム(19)により前記保持領域(12a)内に抱え込む容器保持装置(16)において、前記保持領域(12a)の周囲にて上下方向に延びるように配置されたアーム軸(26)と、前記アーム軸(26)を前記保持領域(12a)の周囲の第1の位置(P)と該第1の位置(P)よりも前記保持領域(12a)の他方の側に後退した第2の位置(Q)との間で駆動するアーム駆動機構(27)と、を具備し、前記第1の位置(P)にて前記アーム(19)の先端部が前記保持領域(12a)の前記一方の側に進出し、前記第2の位置(Q)にて前記アーム(19)の前記先端部が前記保持領域(12a)の前記他方の側に後退するようにして前記アーム(19)を前記アーム軸(26)に取り付けることにより上記課題を解決する。
【0010】
本発明によると、アーム軸が、アーム駆動機構によって、保持領域の周囲の第1の位置とその第1の位置よりも保持領域の他方の側に後退した第2の位置との間で駆動される。従って、他の搬送装置から容器が乗り移る際には、アーム軸を保持領域の他方の側に後退した第2の位置に退避させておくことができる。故に、先行するスターホイールの保持バーを容器が搬送装置に乗り移る直前の位置まで延ばすことができる。また、その際、アームの先端部も保持領域の他方の側に後退されるため、容器がアームの先端部が容器と接触することもない。更に、容器を搬送している間はアーム軸を第1の位置として、アームの先端部を保持領域の一方の側に進出させることにより、容器が飛び出さないように保持することができる。
【0011】
本発明の一形態において、前記アーム軸(26)が前記容器台(12)の中心線(C2)の回りに円弧状に移動するようにしてもよい。これによると、アーム軸の移動に必要なスペースは、容器台に沿ったわずかなスペースであるので、容器台の間を広くとる必要がなく、搬送装置自体の小型化を図ることができる。
【0012】
また、本発明の一形態において、前記アーム(19)がその先端部にローラ(45)を含むようにしてもよい。これによると、アームが容器に沿って移動する際に、滑らかに移動することができる。
【0013】
更に、本形態の一形態において、前記アーム軸(26)がローラ(42,43)を含んでいてもよい。これによると、アーム軸も、容器に沿って移動する際に、滑らかに移動することができる。
【0014】
本発明の一形態において、前記アーム軸(26)の前記ローラ(42,43)を前記アーム(19)よりも上方及び下方の領域のそれぞれに取り付けてもよい。これによると、アーム軸の部分では、上下2箇所で容器を保持しているため、より安定した保持が可能となる。
【0015】
また、本発明の一形態において、前記容器台(12)が複数並んでおり、一つの容器台(12)の保持領域(12a)に関して、隣接する容器台(12’)の保持領域(12a’)に沿って移動する前記アーム(19’)及び前記アーム軸(26’)の少なくともいずれか一方が受け部(46b’)として機能するようにしてもよい。これによると、受け部を別途設ける必要がなく、少ない部品で容器の保持が可能となる。
【0016】
更に、本発明の一形態において、円弧状の搬送軌跡に沿って容器台(12)が複数並んでおり、前記アーム駆動機構(27)が、前記アーム軸(26)よりも搬送軌跡の中心側に後退するようにしてもよい。これによると、アーム駆動機構が、アーム軸よりも搬送軌跡の中心側に後退しているので、容器移送の際に邪魔になることがない。
【0017】
なお、以上の説明では本発明の理解を容易にするために添付図面の参照符号を括弧書きにて付記したが、それにより本発明が図示の形態に限定されるものではない。
【発明の効果】
【0018】
以上、説明したように、本発明の容器保持装置によれば、上下に保持バーが設けられたスターホイール等の他の搬送装置から本発明の容器保持装置が設けられた搬送装置に容器を移送する際に、アーム軸を、後退した第2の位置に移動させることができる。従って、スターホイールに設けられた容器の保持バーを、上下共に、本発明の容器保持装置が設けられた搬送装置に乗り移る直前の位置まで延ばすことができる。故に、乗り移り時に容器の傾きがなく、安定したハンドリングが可能となる。また、移送時に容器がアームの先端と接触することもないため、アーム等の容器保持装置の構成部品に無理な力が働きにくく、構成部品が破損する可能性も低い。
【発明を実施するための最良の形態】
【0019】
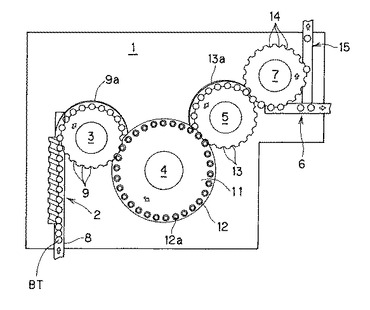
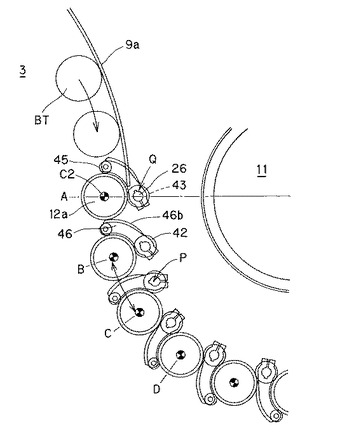
図1は、本発明の容器保持装置が使用される搬送装置を備えた検査装置1の概略図である。検査装置1は、検査対象の容器である複数の壜BTが順次搬入される搬入部2と、搬入された壜BTを中継する第1スターホイール3と、第1スターホイール3から中継された壜BTの側面や口部の検査を行うロータ等の搬送装置4と、搬送装置4での検査が終了した壜BTを受け取って壜BTの底部検査等の搬送装置4と別個の検査を行う第2スターホイール5と、第2スターホイール5の壜BTを搬出部6に順次受け渡している第3スターホイール7とを備えている。
【0020】
搬入部2は、搬送装置1の上工程から送られた壜BTを検査装置1の内部に導入させるコンベヤ8を備える。そして上工程から搬送されてきた壜BTは、このコンベヤ8で等間隔に配置される。
【0021】
搬入部2から搬送装置4へ壜BTを中継する第1スターホイール3の周縁には、等間隔を成すようにして配された円弧状のポケット9…9が複数設けられている。そしてコンベヤ8によって等間隔に配置された壜BTは、これらポケット9…9に収容されて搬送装置4へと搬送される。ここで、第1スターホイール3の外周のうちの、壜BTが収容されて搬送されるコンベア8と搬送装置4との間には、壜BTの外方への飛び出し等を防止するために、上下2本の保持バー9aが設けられている(図1においては上の保持バーのみ図示)。
【0022】
搬送装置4は、周縁部に複数の容器台12が設けられた水平に回転する大型の回転テーブル11を備える。ここで壜BTは、容器台12上の保持領域12aに対して、当該保持領域12aの一方の側から搬入され、後述する本形態にかかる容器保持装置によって保持領域12a内に抱え込まれた状態で搬送される。そしてこの回転テーブル11の周囲には、図示しない照明装置とカメラが設置されており、照明装置により各壜BTが照射され、照射された壜BTの画像がカメラに取り込まれ、この画像に基づいて壜BTの側部や口部等の欠陥の有無が検査される。
【0023】
第2スターホイール5の周縁にも、等間隔を成すように配された円弧状のポケット13…13が複数設けられている。そして回転テーブル11での検査が終了した壜BTは、第2スターホイール5へと順次受け渡され、これらポケット13…13内に保持される。なお、この第2スターホイール5にも、上下2本の保持バー13aが設けられている(図1においては上の保持バーのみ図示)。そしてこの第2スターホイール5では、例えば、壜BTが空中搬送され、底部の欠陥等の検査が行われる。
【0024】
第2スターホイール5での検査を終えた壜BTは、更に、同様に周縁に等間隔を成すようにして配された円弧状のポケット14…14が複数設けられた第3スターホイール7へ受け渡される。そしてこの第3スターホイール7において、欠陥の発見されなかった良品は搬出部6へ搬送され、欠陥の発見された不良品はリジェクト部15へ送り出される。
【0025】
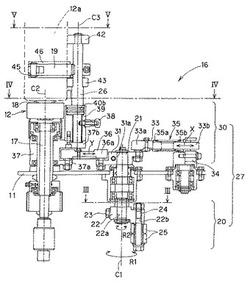
図2は、搬送装置4に設けられた容器台12と、各容器台12の周囲に配置され容器保持装置16を示した図である。
【0026】
容器台12は、回転テーブル11の縁部を貫通する軸部17と、その上部の載置台18と、を備え、上部に保持領域12aを有している。そして載置台18は回転テーブル11に対して更に自転可能であり、その載置台18には、軸部17を通して図示しないバキューム装置が連結されており、壜BTを載置台18に載せて吸着することができるようになっている。
【0027】
本形態にかかる容器保持装置16は、この容器台12上の保持領域12aに対して、当該保持領域12aの一方の側から搬入された壜BTを保持領域12a内に抱え込むための装置であり、壜BTを抱え込むアーム19と、当該アーム19が取り付けられ、保持領域12aの周囲にて上下方向に延びるように配置されたアーム軸26と、このアーム軸26を駆動するアーム駆動機構27と、を具備する。
【0028】
アーム駆動機構27は、回転テーブル11より下に設けられ、後述する板カムによって駆動される下部駆動ユニット20と、回転テーブル11より上に設けられ且つ下部駆動ユニット20によって駆動される上部駆動ユニット30と、を備える。
【0029】
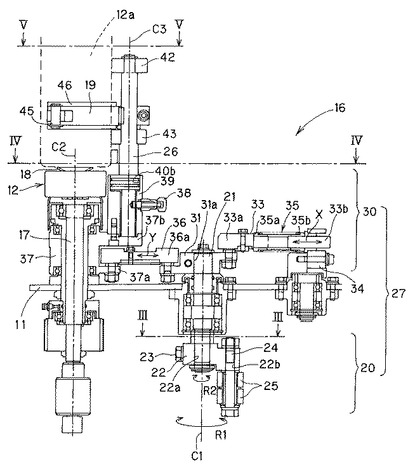
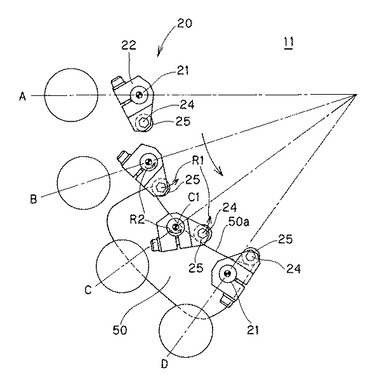
まず、下部駆動ユニット20について図2及び図3を参照して更に詳述する。図3は図2のIII-III線に沿った下部駆動ユニット20の上面図である。下部駆動ユニット20は、回転テーブル11を貫通して上部駆動ユニット30まで垂直に延び、且つ中心線C1の回りを回転可能な駆動軸21を備える。駆動軸21には、下部駆動ブロック22が取り付けられている。その下部駆動ブロック22は、2つの貫通穴22a,22bを備え、その一方の貫通穴22aには外部から所定幅の切れ込み22cが設けられている。その切れ込み22cを挟んでボルト23によって切れ込み22cの幅が狭くなる方向に締め付けることにより、駆動軸21を下部駆動ブロック22に対して固定し、駆動軸21と下部駆動ブロック22とが、共に中心線C1の回りを回転するようになっている。また、下部駆動ブロック22の他方の貫通孔22bにはローラ軸24が挿通され、該ローラ軸24の下部駆動ブロック22より下の部分には、2つの駆動ローラ25が回転可能に挿通されている。そしてこの駆動ローラ25が、回転テーブル11の回転に伴い、後述するように回転テーブル11の周縁部の下部の所定位置に設けられた板カムと係合することによって、中心線C1の回りを図中R1で示す矢印に沿って回転すると、駆動軸21も中心線C1の回りを図中R2で示した方向に回転するようになっている。
【0030】
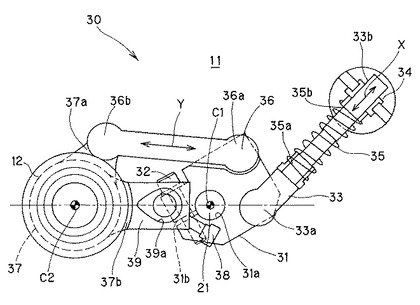
次に、上部駆動ユニット30について図2及び図4を参照して詳述する。図4は、図2のIV-IV線に沿った上部駆動ユニット30の図ある。上部駆動ユニット30は、上述したように回転テーブル11を貫通して下部駆動ユニット20から延びる駆動軸21が挿通される上部駆動ブロック31を備えている。この上部駆動ブロック31の、駆動軸21が挿通している貫通穴31aには、下部駆動ブロック22と同様に所定幅の切れ込み31bが設けられている。そして、その切れ込み31bを挟んでボルト32によって切れ込み31bの幅が狭くなる方向に締め付けることによって、上部駆動ブロック31が駆動軸21に対して固定され、駆動軸21と上部駆動ブロック31とが共に回転するようになっている。
【0031】
この上部駆動ブロック31は多角形であって、その一の角部には、付勢クランク33の一端33aが回転可能に取り付けられている。そして、回転テーブル11上の、駆動軸21よりも壜BTの搬送軌跡の中心側の所定の位置には、その付勢クランク33を回転テーブル11に取り付けるための回転ブロック34が該回転テーブル11に対して回転可能に取り付けられている。そして付勢クランク33の他端33bは、この回転ブロック34に取り付けられており、回転ブロック34と共に所定の角度を回転するが、回転ブロック34の径方向に対しては図4において矢印で示した方向Xに水平移動が可能になっている。また、この付勢クランク33には、ばね35が巻かれており、このばね35の一端35aは付勢クランク33の一端側に固定され、ばね35の他端35bは回転ブロック34に対して固定されている。
【0032】
上部駆動ブロック31の他の角部にはアーム駆動クランク36の一端36aが回転可能に取り付けられている。そしてアーム駆動クランク36の他端36bは、容器台12の軸部17の外周を囲む外筒体37の下部から水平に延びる下部外延部37aに回転可能に固定されている。なお、ここで、外筒体37は、容器台12と同じ中心線C2の回りを回転可能であるが、容器台12の回転に連動せずに別個に回転可能となっている。そして駆動軸21が回転すると、上部駆動ブロック31が回転し、それによってアーム駆動クランク36が固定されている他角部も中心線C1の回りを回転する。そうすると、アーム駆動クランク36の一端36aも中心線C1の回りを回転し、それに伴い、アーム駆動クランク36が図2及び図4において矢印Yで示した回転テーブル11の略径方向に押引される。それによってアーム駆動クランク36の他端36bが連結された下部外延部37aも押引されて外筒体37が中心線C2の回りを回転するようになっている。
【0033】
外筒体37の上部からは、更に上部外延部37bが水平に延び、その部外延部37bの上には、アーム軸26の挿入部39aが設けられ且つ微調整用ねじ38を備えたアーム軸固定部材39が取り付けられている。そして上述のように外筒体37が中心線C2の回りを回転すると、上部外延部37b及びアーム軸固定部材39も外筒体37と共に回転するようになっている。
【0034】
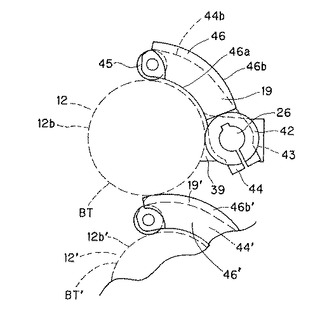
図5は図2のV-V線に沿った図である。アーム軸26の下端は、アーム軸固定部材39に挿入されており、アーム軸26からは、容器台12の中心線の回りに円弧状に設けられたアーム19が延びている。またアーム軸26は、アーム19よりも上方の領域に上部ローラ42、下方の領域に下部ローラ43を含んでいる。アーム19はその先端に、回転可能に取り付けられたアームローラ45を備えている。なお、壜BTを保持した際にこれらの上部ローラ42、下部ローラ43及びアームローラ45が壜BTの外周と接するように、このアーム軸26の位置は、上述の微調整用ねじ38によって微調整可能である。更に、アーム19の上下にはアーム19のカーブに沿って湾曲した補助板46が取り付けられており、この補助板46の内周46aはアーム19の内周と一致し、保持される壜BTの外周に沿って湾曲している。一方、外周はアーム19の外周44bから突き出し、当該上部ローラ42、下部ローラ43及びアームローラ45で支持する壜BTと隣接する、後続の壜BTを保持する受け部46bを形成している。すなわち、壜BTは、上部ローラ42、下部ローラ43、アームローラ45、及び先行する壜BT’を支持するアーム19’の補助板46’の受け部46b’によって支持されている。
【0035】
次に、本形態の容器保持装置により、容器を保持する動作について説明する。図6は回転テーブル11の回転に伴う下部駆動ユニット20の動作を示した図である。図中、位置Aは第1スターホイール3からローラへ壜BTが乗り移る地点であり、位置Bは壜BTの保持動作が開始する地点、位置Cは保持動作の途中の地点、位置Dは保持動作の完了地点である。そして本形態において、回転テーブル11の外周側の下方の、位置B〜位置Dの部分には、回転テーブル11と共に回転せずにベース(図示せず)に対して固定された板カム50が設けられている。
【0036】
まず、位置Aにおいて、ローラ軸24は、回転テーブル11の中心からの距離が駆動軸21と略同距離である。位置Bに来ると、回転テーブル11の外縁部に設けられた板カム50の内外周50aと駆動ローラ25とが当接し、板カム50の内外周50aに沿って駆動ローラ25が内方に押されてローラ軸24が中心線C1の回りを図中R1の方向半時計回りで回転し始める。
【0037】
位置Cは、駆動ローラ25が板カム50の内外周50aに沿って回転テーブル11の内方に移動している状態で、それに伴い、アーム駆動機構の下部駆動ブロック22が回転して駆動軸21が半時計回のR2の方向に回転する。
【0038】
位置Dは、駆動ローラ25が回転テーブル11の中心側に最も近く移動した地点で、板カム50が終了し、駆動ローラ25及びローラ軸24の旋回も終了し、駆動軸21の回転も終了する。
【0039】
図7は図6の位置に対応したアーム駆動機構の上部駆動ユニット30の動作を示した図である。まず、位置Bにおいて下部駆動ユニット20の動作によって駆動軸21が回転を開始する。すると、ばね35は収縮されて付勢クランク33が図中矢印Xの方向に押され、アーム駆動クランクが図中Yの方向に押し出される。そうするとアーム駆動クランク36の先端が、容器台12の回りを回転する外筒体37に取り付けられているため外筒体37も中心線C2の回りを半時計周りに回転する。そして、外筒体37の上部に取り付けられた上部外延部37bも半時計周りに回転する。
【0040】
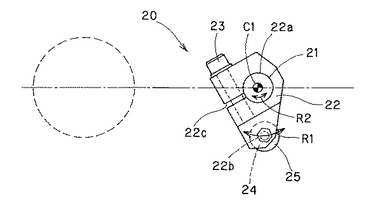
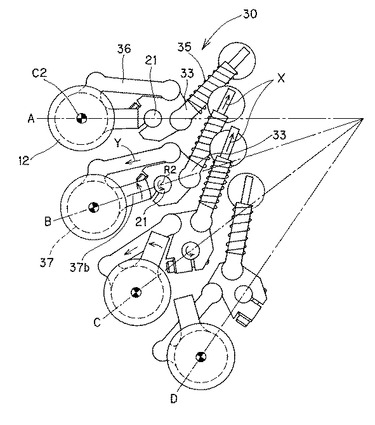
図8は、図6及び図7に対応したアーム19及びアーム軸26の動作を示した図である。図示したように位置Aにおいて、第1スターホイール3から搬送されてきた壜BTが、容器台上の保持領域12aに対して当該保持領域12aの一方の側から搬入される。そして保持領域12aの他方の側に位置する、補助板46の外周面である受け部46bにて受け止められる。そして保持領域12aを挟んでこの受け部46bと対向するアーム19により保持領域内12aに抱え込まれる。
【0041】
上述したように第1スターホイール3において、第1スターホイール3のポケット9から、壜BTが遠心力などによって外方に飛び出したりしないように、壜BTの上下を保持する2本の保持バー9aが取り付けられている(図中上部保持バーのみ図示)。本形態によると、載り移る際の位置Aにおいて、アーム軸26は、搬入側に対する他方の側の中央部に後退した第2の位置Qまで引っ込んでいる。従って、アーム軸26が保持バー9aの障害とならず、保持バー9aは、上下2本とも、容器台12に乗り移る直前まで壜BTの側部を支持する位置まで延ばすことができる。従って、乗り移り時に壜BTが傾いて倒れたりすることがなく、安定したハンドリングが可能となる。また補助板46の受け部46bが後続の壜BTの外周を保持するため、少ない部品で壜BTを3点で保持することができる。
【0042】
また位置Aにおいて搬送装置4に乗り移った壜BTに対して、位置Bにおいて、駆動軸21の回転により、アーム軸26が容器台12の中心線C2の回りを円弧状に移動して、上部ローラ42及び下部ローラ43も、保持領域12aの壜BTの搬入側である一方の側に向かう。それによって、アームローラ45を含むアーム19も容器台12の中心線C2の回りに円弧状に移動し、アームローラ45が保持領域12aの、一方の側に進出を開始する。この際、補助板46の受け部46bは後続の壜BTの外周を滑りながら保持している。位置Cでは、上部ローラ42及び下部ローラ43とアームローラ45とは更に壜BTの外周に沿って更に移動し続ける。そして位置Dにおいて、アーム軸26が上述の第2の位置Qである後退位置から、その第2の位置Qよりも保持領域の他方の側から前進した第1の位置Pである延伸位置にくると、移動は終了する。そして、この位置でアームローラ45が、壜BTの保持領域12aの搬入側である一方の側を保持しているため、この状態で壜BTを旋回搬送しても、壜BTが外方に飛び出すことがない。
【0043】
なお、本形態の容器保持装置により、壜BTの保持を解除する動作は、アーム駆動機構が保持動作の場合と逆となる。図示しないが、壜BTの解除地点に来ると、回転テーブル11に設けられた図6に示した板カム50と異なる板カムによって、駆動ローラ25が図6に示した矢印R1と逆の方向に押されてローラ軸24が中心線C1の回りをR1と逆の方向に回転し始める。それに伴い、アーム駆動機構27の下部駆動ブロック22が回転して、駆動軸21が、図6で示した方向R2と逆の時計回りの方向に回転する。そうすると、ばね35の力に抗して付勢クランク33が図7で示した矢印Xの方向に押される。そしてアーム駆動クランクは図中矢印Yと逆の方向に押し戻され、外筒体37も中心線C2の回りを時計周りに回転する。そして、外筒体37の上部に取り付けられた上部外延部37bも時計周りに回転する。更に、スターホイール5との接点に移動すると、アーム駆動機構によってアーム軸26が保持領域12aの周囲の搬入側である第1の位置Pから第1の位置Pよりも保持領域12aの他方の側に後退した第2の位置へと駆動され、保持領域12aの搬入側に進出していたアーム19の先端部が、保持領域12aの他方の側に後退する。そうすると保持されていた壜BTは、他のスターホイール5との接点において保持が解除され、保持領域12aの一方の側から搬出される。この場合、他のスターホイール5の上下2本の保持バー13aを、壜BTが乗り移る際に既に壜BTの側部を保持することができる位置まで延長することができる。従って、乗り移り時に壜BTが傾いて倒れたりすることがなく、安定したハンドリングが可能となる。
【0044】
更に、本形態によると、アーム軸26を単にアーム軸固定部材39から取り外すだけで交換が可能であるため、上部ローラ43、下部ローラ42、アーム19及びアームローラ45等の部品が消耗した場合であっても、交換を容易且つ安価に行うことができる。また、アーム19が壜BT間に滑り込み、アームローラ45で先行する壜BTを、そして補助板46aの背部に設けられた受け部46bで後続の壜BTを保持するため、壜BTに無理な力が働きにくくスムーズなハンドリングが可能となる。また、アーム駆動機構27の動作を、小型の板カム50で行うことができるため、大掛かりなカム機構が不要である。
【0045】
なお、本発明は、上述した形態に限定されることなく、種々の形態にて実施してよい。例えば、本形態では受け部としてアームに取り付けられた補助板の背部を利用したがこれに限定されず、アームの背部を直接受け部として利用してもよく、またアーム軸を受け部として用いることもできる。また、本形態は検査装置で用いられる搬送装置に使用される支持機構について説明したが、検査装置以外の搬送機構で使用される支持機構であってもよい。また搬送装置は、回転テーブルとして説明したが、直線的に容器を搬送するものであってもよい。
【図面の簡単な説明】
【0046】
【図1】本発明の一形態にかかる容器保持装置が使用される搬送装置を備えた検査装置の概略図。
【図2】容器台及びその周囲に配置された容器保持装置を示した図。
【図3】図2のIII-III線に沿った下部駆動ユニットの図。
【図4】図2のIV-IV線に沿った上部駆動ユニットの図。
【図5】図2のV-V線に沿った保持ユニットの図。
【図6】回転テーブルの回転に伴う下部駆動ユニットの動作を示した図。
【図7】図6の位置に対応した上部駆動ユニットの動作を示した図。
【図8】図6及び図7に対応したアーム軸及びアームの動作を示した図。
【符号の説明】
【0047】
12 容器台
12a 保持領域
16 容器保持装置
19 アーム
26 アーム軸
27 アーム駆動機構
42 上部ローラ(ローラ)
43 下部ローラ(ローラ)
45 アームローラ(ローラ)
46b 受け部
BT 壜(容器)
P 第1の位置
Q 第2の位置
【技術分野】
【0001】
本発明は、搬送装置の容器台に載置された容器を支持する容器保持装置に関する。
【背景技術】
【0002】
従来、飲料等が充填される壜等の容器を搬送させながら傷の有無等を検査する検査装置が知られている。このような検査装置において容器は、搬入部からスターホイールに移送され、更にスターホイールから回転テーブルを備えた搬送装置に移送されて各種検査が行われる。
【0003】
このスターホイールで容器は、外周に設けられたポケットに保持されて回転テーブルまで搬送される。そしてスターホイールの外周側には、容器の外方への飛び出し等を防止するために上下2本の保持バーが設けられている。
【0004】
また、回転テーブルで容器は、当該回転テーブルの周縁部に等間隔で複数設けられた、当該回転テーブルに対して更に回転可能な容器台に搭載されて搬送される。この容器台の周囲には、容器の芯ずれ及び位相ずれを防止するために、容器の外周を支える容器保持装置が設けられている。
【0005】
この容器保持装置は、容器台に隣接して固定され、上下にローラを備えたアーム軸と、当該アーム軸から容器の外周に沿って湾曲して外方に延び且つアーム軸の回りを旋回し、先端にアームローラを備えているアームと、を具備する。そして、このアーム軸が固定されている容器台に隣接した位置は、回転テーブルの中心線の回りを容器台の中心を通る円を描いた場合の、その円周上であり、アーム軸の高さは容器の中央部まである。また、アーム軸は回転テーブルの下方にも延び、その下端には、駆動ブロック固定され、この駆動ブロックのアーム軸と異なる位置には、動作用ローラが挿通されたローラ軸が挿通されている。そして、この動作用ローラをアーム軸に対して回転させるための溝カムが回転テーブルの下に設けられ、動作用ローラは溝カムの内周に接するようにばねによって付勢されている。
【0006】
そして回転テーブルの回転に伴い、動作用ローラが溝カム内を移動し、容器の搬入及び搬出位置に来たときに変化する溝カムの形状によって動作用ローラが移動し、その移動によってアーム軸が回転テーブルに対して回転する。そして、アーム軸が回転するとアームが旋回し、容器に対してアームが開閉し、容器の保持動作が行われる(特許文献1参照)。
【特許文献1】特開2003−322235号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
スターホイールから回転テーブルへ容器が乗り移る際の安定した乗り移りのため容器は、回転テーブルの回転台に移送される直前まで、スターホイールの上述した上下の保持バーにより支持されていることが好ましい。しかし、従来の保持機構では、容器の中央部まで垂直に延びるアーム軸が、容器台の中心を通る円周上に設けられている。従って、下の保持バーを、容器台に乗り移る直前まで壜の側部を支持する位置まで延ばすことができない。故に容器は、乗り移る際に、上下の保持バーのうちの下の保持バーがなく、上の保持バーのみで保持された状態であり、乗り移りの際に傾き、倒れて破損する場合がある。そうすると容器の破片を除去するためにラインを停止しなくてならない。また、容器台や容器保持装置等の機械部品が破損してしまうこともある。乗り移りの際に容器はアームの先端部の極近傍を通過するため、乗り移りの際にこの先端部と容器とが接触し、アーム等の部品が曲がることがある。更に、アーム軸を回転させるために回転テーブルの下に設けられる溝カムは大掛かりな機構である。そして動作用ローラには常にばねによって負荷がかけられており、磨耗しやすいという欠点がある。
【0008】
そこで、本発明は、スターホイールから回転テーブルへの移送の際に、アーム軸及びアームが障害とならず、且つ簡単且つ丈夫な駆動機構で動作される容器保持装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、容器台(12)上の保持領域(12a)に対して該保持領域(12a)の一方の側から搬入される容器(BT)を、前記保持領域(12a)の他方の側に位置する受け部(46b)にて受け止めつつ前記保持領域(12a)を挟んで前記受け部(46b)と対向するアーム(19)により前記保持領域(12a)内に抱え込む容器保持装置(16)において、前記保持領域(12a)の周囲にて上下方向に延びるように配置されたアーム軸(26)と、前記アーム軸(26)を前記保持領域(12a)の周囲の第1の位置(P)と該第1の位置(P)よりも前記保持領域(12a)の他方の側に後退した第2の位置(Q)との間で駆動するアーム駆動機構(27)と、を具備し、前記第1の位置(P)にて前記アーム(19)の先端部が前記保持領域(12a)の前記一方の側に進出し、前記第2の位置(Q)にて前記アーム(19)の前記先端部が前記保持領域(12a)の前記他方の側に後退するようにして前記アーム(19)を前記アーム軸(26)に取り付けることにより上記課題を解決する。
【0010】
本発明によると、アーム軸が、アーム駆動機構によって、保持領域の周囲の第1の位置とその第1の位置よりも保持領域の他方の側に後退した第2の位置との間で駆動される。従って、他の搬送装置から容器が乗り移る際には、アーム軸を保持領域の他方の側に後退した第2の位置に退避させておくことができる。故に、先行するスターホイールの保持バーを容器が搬送装置に乗り移る直前の位置まで延ばすことができる。また、その際、アームの先端部も保持領域の他方の側に後退されるため、容器がアームの先端部が容器と接触することもない。更に、容器を搬送している間はアーム軸を第1の位置として、アームの先端部を保持領域の一方の側に進出させることにより、容器が飛び出さないように保持することができる。
【0011】
本発明の一形態において、前記アーム軸(26)が前記容器台(12)の中心線(C2)の回りに円弧状に移動するようにしてもよい。これによると、アーム軸の移動に必要なスペースは、容器台に沿ったわずかなスペースであるので、容器台の間を広くとる必要がなく、搬送装置自体の小型化を図ることができる。
【0012】
また、本発明の一形態において、前記アーム(19)がその先端部にローラ(45)を含むようにしてもよい。これによると、アームが容器に沿って移動する際に、滑らかに移動することができる。
【0013】
更に、本形態の一形態において、前記アーム軸(26)がローラ(42,43)を含んでいてもよい。これによると、アーム軸も、容器に沿って移動する際に、滑らかに移動することができる。
【0014】
本発明の一形態において、前記アーム軸(26)の前記ローラ(42,43)を前記アーム(19)よりも上方及び下方の領域のそれぞれに取り付けてもよい。これによると、アーム軸の部分では、上下2箇所で容器を保持しているため、より安定した保持が可能となる。
【0015】
また、本発明の一形態において、前記容器台(12)が複数並んでおり、一つの容器台(12)の保持領域(12a)に関して、隣接する容器台(12’)の保持領域(12a’)に沿って移動する前記アーム(19’)及び前記アーム軸(26’)の少なくともいずれか一方が受け部(46b’)として機能するようにしてもよい。これによると、受け部を別途設ける必要がなく、少ない部品で容器の保持が可能となる。
【0016】
更に、本発明の一形態において、円弧状の搬送軌跡に沿って容器台(12)が複数並んでおり、前記アーム駆動機構(27)が、前記アーム軸(26)よりも搬送軌跡の中心側に後退するようにしてもよい。これによると、アーム駆動機構が、アーム軸よりも搬送軌跡の中心側に後退しているので、容器移送の際に邪魔になることがない。
【0017】
なお、以上の説明では本発明の理解を容易にするために添付図面の参照符号を括弧書きにて付記したが、それにより本発明が図示の形態に限定されるものではない。
【発明の効果】
【0018】
以上、説明したように、本発明の容器保持装置によれば、上下に保持バーが設けられたスターホイール等の他の搬送装置から本発明の容器保持装置が設けられた搬送装置に容器を移送する際に、アーム軸を、後退した第2の位置に移動させることができる。従って、スターホイールに設けられた容器の保持バーを、上下共に、本発明の容器保持装置が設けられた搬送装置に乗り移る直前の位置まで延ばすことができる。故に、乗り移り時に容器の傾きがなく、安定したハンドリングが可能となる。また、移送時に容器がアームの先端と接触することもないため、アーム等の容器保持装置の構成部品に無理な力が働きにくく、構成部品が破損する可能性も低い。
【発明を実施するための最良の形態】
【0019】
図1は、本発明の容器保持装置が使用される搬送装置を備えた検査装置1の概略図である。検査装置1は、検査対象の容器である複数の壜BTが順次搬入される搬入部2と、搬入された壜BTを中継する第1スターホイール3と、第1スターホイール3から中継された壜BTの側面や口部の検査を行うロータ等の搬送装置4と、搬送装置4での検査が終了した壜BTを受け取って壜BTの底部検査等の搬送装置4と別個の検査を行う第2スターホイール5と、第2スターホイール5の壜BTを搬出部6に順次受け渡している第3スターホイール7とを備えている。
【0020】
搬入部2は、搬送装置1の上工程から送られた壜BTを検査装置1の内部に導入させるコンベヤ8を備える。そして上工程から搬送されてきた壜BTは、このコンベヤ8で等間隔に配置される。
【0021】
搬入部2から搬送装置4へ壜BTを中継する第1スターホイール3の周縁には、等間隔を成すようにして配された円弧状のポケット9…9が複数設けられている。そしてコンベヤ8によって等間隔に配置された壜BTは、これらポケット9…9に収容されて搬送装置4へと搬送される。ここで、第1スターホイール3の外周のうちの、壜BTが収容されて搬送されるコンベア8と搬送装置4との間には、壜BTの外方への飛び出し等を防止するために、上下2本の保持バー9aが設けられている(図1においては上の保持バーのみ図示)。
【0022】
搬送装置4は、周縁部に複数の容器台12が設けられた水平に回転する大型の回転テーブル11を備える。ここで壜BTは、容器台12上の保持領域12aに対して、当該保持領域12aの一方の側から搬入され、後述する本形態にかかる容器保持装置によって保持領域12a内に抱え込まれた状態で搬送される。そしてこの回転テーブル11の周囲には、図示しない照明装置とカメラが設置されており、照明装置により各壜BTが照射され、照射された壜BTの画像がカメラに取り込まれ、この画像に基づいて壜BTの側部や口部等の欠陥の有無が検査される。
【0023】
第2スターホイール5の周縁にも、等間隔を成すように配された円弧状のポケット13…13が複数設けられている。そして回転テーブル11での検査が終了した壜BTは、第2スターホイール5へと順次受け渡され、これらポケット13…13内に保持される。なお、この第2スターホイール5にも、上下2本の保持バー13aが設けられている(図1においては上の保持バーのみ図示)。そしてこの第2スターホイール5では、例えば、壜BTが空中搬送され、底部の欠陥等の検査が行われる。
【0024】
第2スターホイール5での検査を終えた壜BTは、更に、同様に周縁に等間隔を成すようにして配された円弧状のポケット14…14が複数設けられた第3スターホイール7へ受け渡される。そしてこの第3スターホイール7において、欠陥の発見されなかった良品は搬出部6へ搬送され、欠陥の発見された不良品はリジェクト部15へ送り出される。
【0025】
図2は、搬送装置4に設けられた容器台12と、各容器台12の周囲に配置され容器保持装置16を示した図である。
【0026】
容器台12は、回転テーブル11の縁部を貫通する軸部17と、その上部の載置台18と、を備え、上部に保持領域12aを有している。そして載置台18は回転テーブル11に対して更に自転可能であり、その載置台18には、軸部17を通して図示しないバキューム装置が連結されており、壜BTを載置台18に載せて吸着することができるようになっている。
【0027】
本形態にかかる容器保持装置16は、この容器台12上の保持領域12aに対して、当該保持領域12aの一方の側から搬入された壜BTを保持領域12a内に抱え込むための装置であり、壜BTを抱え込むアーム19と、当該アーム19が取り付けられ、保持領域12aの周囲にて上下方向に延びるように配置されたアーム軸26と、このアーム軸26を駆動するアーム駆動機構27と、を具備する。
【0028】
アーム駆動機構27は、回転テーブル11より下に設けられ、後述する板カムによって駆動される下部駆動ユニット20と、回転テーブル11より上に設けられ且つ下部駆動ユニット20によって駆動される上部駆動ユニット30と、を備える。
【0029】
まず、下部駆動ユニット20について図2及び図3を参照して更に詳述する。図3は図2のIII-III線に沿った下部駆動ユニット20の上面図である。下部駆動ユニット20は、回転テーブル11を貫通して上部駆動ユニット30まで垂直に延び、且つ中心線C1の回りを回転可能な駆動軸21を備える。駆動軸21には、下部駆動ブロック22が取り付けられている。その下部駆動ブロック22は、2つの貫通穴22a,22bを備え、その一方の貫通穴22aには外部から所定幅の切れ込み22cが設けられている。その切れ込み22cを挟んでボルト23によって切れ込み22cの幅が狭くなる方向に締め付けることにより、駆動軸21を下部駆動ブロック22に対して固定し、駆動軸21と下部駆動ブロック22とが、共に中心線C1の回りを回転するようになっている。また、下部駆動ブロック22の他方の貫通孔22bにはローラ軸24が挿通され、該ローラ軸24の下部駆動ブロック22より下の部分には、2つの駆動ローラ25が回転可能に挿通されている。そしてこの駆動ローラ25が、回転テーブル11の回転に伴い、後述するように回転テーブル11の周縁部の下部の所定位置に設けられた板カムと係合することによって、中心線C1の回りを図中R1で示す矢印に沿って回転すると、駆動軸21も中心線C1の回りを図中R2で示した方向に回転するようになっている。
【0030】
次に、上部駆動ユニット30について図2及び図4を参照して詳述する。図4は、図2のIV-IV線に沿った上部駆動ユニット30の図ある。上部駆動ユニット30は、上述したように回転テーブル11を貫通して下部駆動ユニット20から延びる駆動軸21が挿通される上部駆動ブロック31を備えている。この上部駆動ブロック31の、駆動軸21が挿通している貫通穴31aには、下部駆動ブロック22と同様に所定幅の切れ込み31bが設けられている。そして、その切れ込み31bを挟んでボルト32によって切れ込み31bの幅が狭くなる方向に締め付けることによって、上部駆動ブロック31が駆動軸21に対して固定され、駆動軸21と上部駆動ブロック31とが共に回転するようになっている。
【0031】
この上部駆動ブロック31は多角形であって、その一の角部には、付勢クランク33の一端33aが回転可能に取り付けられている。そして、回転テーブル11上の、駆動軸21よりも壜BTの搬送軌跡の中心側の所定の位置には、その付勢クランク33を回転テーブル11に取り付けるための回転ブロック34が該回転テーブル11に対して回転可能に取り付けられている。そして付勢クランク33の他端33bは、この回転ブロック34に取り付けられており、回転ブロック34と共に所定の角度を回転するが、回転ブロック34の径方向に対しては図4において矢印で示した方向Xに水平移動が可能になっている。また、この付勢クランク33には、ばね35が巻かれており、このばね35の一端35aは付勢クランク33の一端側に固定され、ばね35の他端35bは回転ブロック34に対して固定されている。
【0032】
上部駆動ブロック31の他の角部にはアーム駆動クランク36の一端36aが回転可能に取り付けられている。そしてアーム駆動クランク36の他端36bは、容器台12の軸部17の外周を囲む外筒体37の下部から水平に延びる下部外延部37aに回転可能に固定されている。なお、ここで、外筒体37は、容器台12と同じ中心線C2の回りを回転可能であるが、容器台12の回転に連動せずに別個に回転可能となっている。そして駆動軸21が回転すると、上部駆動ブロック31が回転し、それによってアーム駆動クランク36が固定されている他角部も中心線C1の回りを回転する。そうすると、アーム駆動クランク36の一端36aも中心線C1の回りを回転し、それに伴い、アーム駆動クランク36が図2及び図4において矢印Yで示した回転テーブル11の略径方向に押引される。それによってアーム駆動クランク36の他端36bが連結された下部外延部37aも押引されて外筒体37が中心線C2の回りを回転するようになっている。
【0033】
外筒体37の上部からは、更に上部外延部37bが水平に延び、その部外延部37bの上には、アーム軸26の挿入部39aが設けられ且つ微調整用ねじ38を備えたアーム軸固定部材39が取り付けられている。そして上述のように外筒体37が中心線C2の回りを回転すると、上部外延部37b及びアーム軸固定部材39も外筒体37と共に回転するようになっている。
【0034】
図5は図2のV-V線に沿った図である。アーム軸26の下端は、アーム軸固定部材39に挿入されており、アーム軸26からは、容器台12の中心線の回りに円弧状に設けられたアーム19が延びている。またアーム軸26は、アーム19よりも上方の領域に上部ローラ42、下方の領域に下部ローラ43を含んでいる。アーム19はその先端に、回転可能に取り付けられたアームローラ45を備えている。なお、壜BTを保持した際にこれらの上部ローラ42、下部ローラ43及びアームローラ45が壜BTの外周と接するように、このアーム軸26の位置は、上述の微調整用ねじ38によって微調整可能である。更に、アーム19の上下にはアーム19のカーブに沿って湾曲した補助板46が取り付けられており、この補助板46の内周46aはアーム19の内周と一致し、保持される壜BTの外周に沿って湾曲している。一方、外周はアーム19の外周44bから突き出し、当該上部ローラ42、下部ローラ43及びアームローラ45で支持する壜BTと隣接する、後続の壜BTを保持する受け部46bを形成している。すなわち、壜BTは、上部ローラ42、下部ローラ43、アームローラ45、及び先行する壜BT’を支持するアーム19’の補助板46’の受け部46b’によって支持されている。
【0035】
次に、本形態の容器保持装置により、容器を保持する動作について説明する。図6は回転テーブル11の回転に伴う下部駆動ユニット20の動作を示した図である。図中、位置Aは第1スターホイール3からローラへ壜BTが乗り移る地点であり、位置Bは壜BTの保持動作が開始する地点、位置Cは保持動作の途中の地点、位置Dは保持動作の完了地点である。そして本形態において、回転テーブル11の外周側の下方の、位置B〜位置Dの部分には、回転テーブル11と共に回転せずにベース(図示せず)に対して固定された板カム50が設けられている。
【0036】
まず、位置Aにおいて、ローラ軸24は、回転テーブル11の中心からの距離が駆動軸21と略同距離である。位置Bに来ると、回転テーブル11の外縁部に設けられた板カム50の内外周50aと駆動ローラ25とが当接し、板カム50の内外周50aに沿って駆動ローラ25が内方に押されてローラ軸24が中心線C1の回りを図中R1の方向半時計回りで回転し始める。
【0037】
位置Cは、駆動ローラ25が板カム50の内外周50aに沿って回転テーブル11の内方に移動している状態で、それに伴い、アーム駆動機構の下部駆動ブロック22が回転して駆動軸21が半時計回のR2の方向に回転する。
【0038】
位置Dは、駆動ローラ25が回転テーブル11の中心側に最も近く移動した地点で、板カム50が終了し、駆動ローラ25及びローラ軸24の旋回も終了し、駆動軸21の回転も終了する。
【0039】
図7は図6の位置に対応したアーム駆動機構の上部駆動ユニット30の動作を示した図である。まず、位置Bにおいて下部駆動ユニット20の動作によって駆動軸21が回転を開始する。すると、ばね35は収縮されて付勢クランク33が図中矢印Xの方向に押され、アーム駆動クランクが図中Yの方向に押し出される。そうするとアーム駆動クランク36の先端が、容器台12の回りを回転する外筒体37に取り付けられているため外筒体37も中心線C2の回りを半時計周りに回転する。そして、外筒体37の上部に取り付けられた上部外延部37bも半時計周りに回転する。
【0040】
図8は、図6及び図7に対応したアーム19及びアーム軸26の動作を示した図である。図示したように位置Aにおいて、第1スターホイール3から搬送されてきた壜BTが、容器台上の保持領域12aに対して当該保持領域12aの一方の側から搬入される。そして保持領域12aの他方の側に位置する、補助板46の外周面である受け部46bにて受け止められる。そして保持領域12aを挟んでこの受け部46bと対向するアーム19により保持領域内12aに抱え込まれる。
【0041】
上述したように第1スターホイール3において、第1スターホイール3のポケット9から、壜BTが遠心力などによって外方に飛び出したりしないように、壜BTの上下を保持する2本の保持バー9aが取り付けられている(図中上部保持バーのみ図示)。本形態によると、載り移る際の位置Aにおいて、アーム軸26は、搬入側に対する他方の側の中央部に後退した第2の位置Qまで引っ込んでいる。従って、アーム軸26が保持バー9aの障害とならず、保持バー9aは、上下2本とも、容器台12に乗り移る直前まで壜BTの側部を支持する位置まで延ばすことができる。従って、乗り移り時に壜BTが傾いて倒れたりすることがなく、安定したハンドリングが可能となる。また補助板46の受け部46bが後続の壜BTの外周を保持するため、少ない部品で壜BTを3点で保持することができる。
【0042】
また位置Aにおいて搬送装置4に乗り移った壜BTに対して、位置Bにおいて、駆動軸21の回転により、アーム軸26が容器台12の中心線C2の回りを円弧状に移動して、上部ローラ42及び下部ローラ43も、保持領域12aの壜BTの搬入側である一方の側に向かう。それによって、アームローラ45を含むアーム19も容器台12の中心線C2の回りに円弧状に移動し、アームローラ45が保持領域12aの、一方の側に進出を開始する。この際、補助板46の受け部46bは後続の壜BTの外周を滑りながら保持している。位置Cでは、上部ローラ42及び下部ローラ43とアームローラ45とは更に壜BTの外周に沿って更に移動し続ける。そして位置Dにおいて、アーム軸26が上述の第2の位置Qである後退位置から、その第2の位置Qよりも保持領域の他方の側から前進した第1の位置Pである延伸位置にくると、移動は終了する。そして、この位置でアームローラ45が、壜BTの保持領域12aの搬入側である一方の側を保持しているため、この状態で壜BTを旋回搬送しても、壜BTが外方に飛び出すことがない。
【0043】
なお、本形態の容器保持装置により、壜BTの保持を解除する動作は、アーム駆動機構が保持動作の場合と逆となる。図示しないが、壜BTの解除地点に来ると、回転テーブル11に設けられた図6に示した板カム50と異なる板カムによって、駆動ローラ25が図6に示した矢印R1と逆の方向に押されてローラ軸24が中心線C1の回りをR1と逆の方向に回転し始める。それに伴い、アーム駆動機構27の下部駆動ブロック22が回転して、駆動軸21が、図6で示した方向R2と逆の時計回りの方向に回転する。そうすると、ばね35の力に抗して付勢クランク33が図7で示した矢印Xの方向に押される。そしてアーム駆動クランクは図中矢印Yと逆の方向に押し戻され、外筒体37も中心線C2の回りを時計周りに回転する。そして、外筒体37の上部に取り付けられた上部外延部37bも時計周りに回転する。更に、スターホイール5との接点に移動すると、アーム駆動機構によってアーム軸26が保持領域12aの周囲の搬入側である第1の位置Pから第1の位置Pよりも保持領域12aの他方の側に後退した第2の位置へと駆動され、保持領域12aの搬入側に進出していたアーム19の先端部が、保持領域12aの他方の側に後退する。そうすると保持されていた壜BTは、他のスターホイール5との接点において保持が解除され、保持領域12aの一方の側から搬出される。この場合、他のスターホイール5の上下2本の保持バー13aを、壜BTが乗り移る際に既に壜BTの側部を保持することができる位置まで延長することができる。従って、乗り移り時に壜BTが傾いて倒れたりすることがなく、安定したハンドリングが可能となる。
【0044】
更に、本形態によると、アーム軸26を単にアーム軸固定部材39から取り外すだけで交換が可能であるため、上部ローラ43、下部ローラ42、アーム19及びアームローラ45等の部品が消耗した場合であっても、交換を容易且つ安価に行うことができる。また、アーム19が壜BT間に滑り込み、アームローラ45で先行する壜BTを、そして補助板46aの背部に設けられた受け部46bで後続の壜BTを保持するため、壜BTに無理な力が働きにくくスムーズなハンドリングが可能となる。また、アーム駆動機構27の動作を、小型の板カム50で行うことができるため、大掛かりなカム機構が不要である。
【0045】
なお、本発明は、上述した形態に限定されることなく、種々の形態にて実施してよい。例えば、本形態では受け部としてアームに取り付けられた補助板の背部を利用したがこれに限定されず、アームの背部を直接受け部として利用してもよく、またアーム軸を受け部として用いることもできる。また、本形態は検査装置で用いられる搬送装置に使用される支持機構について説明したが、検査装置以外の搬送機構で使用される支持機構であってもよい。また搬送装置は、回転テーブルとして説明したが、直線的に容器を搬送するものであってもよい。
【図面の簡単な説明】
【0046】
【図1】本発明の一形態にかかる容器保持装置が使用される搬送装置を備えた検査装置の概略図。
【図2】容器台及びその周囲に配置された容器保持装置を示した図。
【図3】図2のIII-III線に沿った下部駆動ユニットの図。
【図4】図2のIV-IV線に沿った上部駆動ユニットの図。
【図5】図2のV-V線に沿った保持ユニットの図。
【図6】回転テーブルの回転に伴う下部駆動ユニットの動作を示した図。
【図7】図6の位置に対応した上部駆動ユニットの動作を示した図。
【図8】図6及び図7に対応したアーム軸及びアームの動作を示した図。
【符号の説明】
【0047】
12 容器台
12a 保持領域
16 容器保持装置
19 アーム
26 アーム軸
27 アーム駆動機構
42 上部ローラ(ローラ)
43 下部ローラ(ローラ)
45 アームローラ(ローラ)
46b 受け部
BT 壜(容器)
P 第1の位置
Q 第2の位置
【特許請求の範囲】
【請求項1】
容器台上の保持領域に対して該保持領域の一方の側から搬入される容器を、前記保持領域の他方の側に位置する受け部にて受け止めつつ前記保持領域を挟んで前記受け部と対向するアームにより前記保持領域内に抱え込む容器保持装置において、
前記保持領域の周囲にて上下方向に延びるように配置されたアーム軸と、
前記アーム軸を前記保持領域の周囲の第1の位置と該第1の位置よりも前記保持領域の他方の側に後退した第2の位置との間で駆動するアーム駆動機構と、を具備し、
前記第1の位置にて前記アームの先端部が前記保持領域の前記一方の側に進出し、前記第2の位置にて前記アームの前記先端部が前記保持領域の前記他方の側に後退するようにして前記アームが前記アーム軸に取り付けられている、
ことを特徴とする容器保持装置。
【請求項2】
前記アーム軸が前記容器台の中心線の回りに円弧状に移動することを特徴とする請求項1に記載の容器保持装置。
【請求項3】
前記アームがその先端部にローラを含んでいることを特徴とする請求項2に記載の容器保持装置。
【請求項4】
前記アーム軸がローラを含んでいることを特徴とする請求項2又は3に記載の容器保持装置。
【請求項5】
前記アーム軸の前記ローラが前記アームよりも上方及び下方の領域のそれぞれに取り付けられていることを特徴とする請求項4に記載の容器保持装置。
【請求項6】
前記容器台が複数並んでおり、一つの容器台の保持領域に関して、隣接する容器台の保持領域に沿って移動する前記アーム及び前記アーム軸の少なくともいずれか一方が受け部として機能することを特徴とする請求項4又は5のいずれか1項に記載の容器保持装置。
【請求項7】
円弧状の搬送軌跡に沿って容器台が複数並んでおり、前記アーム駆動機構が、前記アーム軸よりも前記搬送軌跡の中心側に後退していることを特徴とする請求項1〜6のいずれか1項に記載の容器保持装置。
【請求項1】
容器台上の保持領域に対して該保持領域の一方の側から搬入される容器を、前記保持領域の他方の側に位置する受け部にて受け止めつつ前記保持領域を挟んで前記受け部と対向するアームにより前記保持領域内に抱え込む容器保持装置において、
前記保持領域の周囲にて上下方向に延びるように配置されたアーム軸と、
前記アーム軸を前記保持領域の周囲の第1の位置と該第1の位置よりも前記保持領域の他方の側に後退した第2の位置との間で駆動するアーム駆動機構と、を具備し、
前記第1の位置にて前記アームの先端部が前記保持領域の前記一方の側に進出し、前記第2の位置にて前記アームの前記先端部が前記保持領域の前記他方の側に後退するようにして前記アームが前記アーム軸に取り付けられている、
ことを特徴とする容器保持装置。
【請求項2】
前記アーム軸が前記容器台の中心線の回りに円弧状に移動することを特徴とする請求項1に記載の容器保持装置。
【請求項3】
前記アームがその先端部にローラを含んでいることを特徴とする請求項2に記載の容器保持装置。
【請求項4】
前記アーム軸がローラを含んでいることを特徴とする請求項2又は3に記載の容器保持装置。
【請求項5】
前記アーム軸の前記ローラが前記アームよりも上方及び下方の領域のそれぞれに取り付けられていることを特徴とする請求項4に記載の容器保持装置。
【請求項6】
前記容器台が複数並んでおり、一つの容器台の保持領域に関して、隣接する容器台の保持領域に沿って移動する前記アーム及び前記アーム軸の少なくともいずれか一方が受け部として機能することを特徴とする請求項4又は5のいずれか1項に記載の容器保持装置。
【請求項7】
円弧状の搬送軌跡に沿って容器台が複数並んでおり、前記アーム駆動機構が、前記アーム軸よりも前記搬送軌跡の中心側に後退していることを特徴とする請求項1〜6のいずれか1項に記載の容器保持装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−176660(P2007−176660A)
【公開日】平成19年7月12日(2007.7.12)
【国際特許分類】
【出願番号】特願2005−378148(P2005−378148)
【出願日】平成17年12月28日(2005.12.28)
【出願人】(390014661)株式会社キリンテクノシステム (126)
【Fターム(参考)】
【公開日】平成19年7月12日(2007.7.12)
【国際特許分類】
【出願日】平成17年12月28日(2005.12.28)
【出願人】(390014661)株式会社キリンテクノシステム (126)
【Fターム(参考)】
[ Back to top ]