
容器処理装置
【解決手段】 容器処理装置1は、各バケット12内に角型の容器2を収容して搬送する第1搬送コンベヤ3と、第1搬送コンベヤ3によって搬送される容器2を撮影するカメラ4と、制御手段7によって作動を制御されて、バケット12内の容器2を吸着して取り出すロボットハンド6Aとを備えている。
カメラ4が撮影した容器2の画像が制御手段7へ伝達されると、制御手段7は、容器2の画像上の中心位置を求め、そこからバケット12の中心12cへ所定量ずらした位置を上記ロボットハンド6Aによる容器2の吸着位置として決定する。ロボットハンド6Aは、バケット12内で傾斜している容器2の側面2Bの上記吸着位置を吸着してバケット12内から取り出す。
【効果】 角型の容器2であってもロボットハンド6Aによって確実に吸着して取り出すことができる。
カメラ4が撮影した容器2の画像が制御手段7へ伝達されると、制御手段7は、容器2の画像上の中心位置を求め、そこからバケット12の中心12cへ所定量ずらした位置を上記ロボットハンド6Aによる容器2の吸着位置として決定する。ロボットハンド6Aは、バケット12内で傾斜している容器2の側面2Bの上記吸着位置を吸着してバケット12内から取り出す。
【効果】 角型の容器2であってもロボットハンド6Aによって確実に吸着して取り出すことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は容器処理装置に関し、より詳しくは、横転状態の角型の容器を取り出して移送する場合に好適な容器処理装置に関する。
【背景技術】
【0002】
従来、横転状態の容器を搬送する第1搬送コンベヤと、この第1搬送コンベヤ上の容器を保持して次工程の第2搬送コンベヤへ受け渡すロボットとを備えた容器処理装置は知られている(例えば特許文献1)。
この特許文献1の容器処理装置においては、搬送方向の前方側よりも後方側の高さが低くなるように第1搬送コンベヤを傾斜させて配置してあり、かつ第1搬送コンベヤの載置面の所定間隔毎に仕切り部材を配置している。そのため、第1搬送コンベヤによって搬送される横転状態の容器は、上記仕切り部材に当接した状態で下流に向けて搬送される。つまり、第1搬送コンベヤによって搬送される横転状態の容器は、その本体部が搬送方向に対して直交方向に姿勢が揃えられているので、ロボットによって容器を確実に保持して第2搬送コンベヤへ受け渡すことができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4014235号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記特許文献1の容器処理装置は、断面が円形の容器を保持して受け渡すことが前提となっているため、特許文献1の容器処理装置によって容器本体部の断面が角型の容器を処理しようとすると次のような問題が生じる。すなわち、特許文献1においては、傾斜した第1搬送コンベヤによって角型の容器を搬送すると、本体部の側面が水平面に対して傾斜した状態となる(図7参照)。横転した容器の本体部をロボットハンドによって上方から吸着して保持する場合、撮影手段からの画像から容器の本体部の幅方向における中心位置を算出し、その中心位置を吸着するようにしている。
ところが、本体部の側面が水平面に対して傾斜した状態の容器を上方から撮影した場合、隣接する側面も撮影されるため、本体部の側面が水平な状態と比較して本体部の幅を広く認識してしまい、算出される中心位置も本来の側面の中心位置からずれてしまっていた。そのため、本体部の側面が水平面に対して傾斜した状態の容器の本体部をロボットハンドによって上方から吸着して保持しようとすると、容器の本体部の角にロボットハンドの吸盤の一部が当接したり、あるいは本体部の側面から大きくずれた位置を吸盤で吸着することになり、そのような場合にはロボットハンドの吸盤に負圧漏れが生じて角型の容器を保持できないという問題が生じる。
【課題を解決するための手段】
【0005】
上述した事情に鑑み、第1の本発明は、横転状態の角型の容器を収容する複数の収容部を有し、かつ該収容部内に容器を収容して搬送する搬送コンベヤと、上記搬送コンベヤによって搬送される容器を撮影する撮影手段と、上記搬送コンベヤの収容部内の容器を吸着して取り出す取り出し手段と、上記撮影手段が撮影した容器の画像を基にして上記取り出し手段の作動を制御する制御手段とを備えた容器処理装置であって、
上記搬送コンベヤの各収容部を水平面に対して傾斜させて配置して、各収容部内に横転状態の容器が収容されると、該容器の本体部の側面が収容部の最下端位置に当接して位置決めされるように構成し、
また、上記制御手段は、上記撮影手段が撮影した容器の投影画像を基にして、該投影画像において容器の本体部の幅方向の中心位置を求めて、該中心位置よりも上記収容部の最下端位置へ所定量ずれた位置を、上記取り出し手段が容器を吸着するための吸着位置として決定し、さらに容器の本体部における上記吸着位置を上記取り出し手段に吸着させるものである。
また、第2の本発明は、横転状態の角型の容器を収容する複数の収容部を有し、かつ該収容部内に容器を収容して搬送する搬送コンベヤと、上記搬送コンベヤによって搬送される容器を撮影する撮影手段と、上記搬送コンベヤの収容部内の容器を吸着して取り出す取り出し手段と、上記撮影手段が撮影した容器の画像を基にして上記取り出し手段の作動を制御する制御手段とを備えた容器処理装置であって、
上記搬送コンベヤの各収容部を水平面に対して傾斜させて配置して、各収容部内に横転状態の容器が収容されると、該容器の本体部の側面が収容部の最下端位置に当接して位置決めされるように構成し、
また、上記制御手段は、上記撮影手段が撮影した収容部内の容器の投影画像を基にして、該投影画像において容器の首部の幅方向の中心位置を求めて、該容器の首部の中心位置よりも上記収容部の最下端位置へ所定量ずれた位置を、容器を吸着するための吸着位置として決定し、さらに上記容器の本体部における上記吸着位置を上記取り出し手段に吸着させるものである。
【発明の効果】
【0006】
上述した構成によれば、角型の容器を取り出し手段によって確実に吸着して収容部から取り出すことができる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施例を示す平面図。
【図2】図1の要部の正面図。
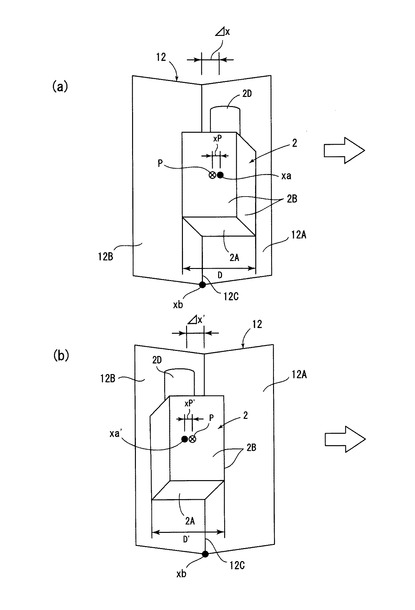
【図3】図1に示すカメラが撮影した容器の投影画像を示す図であり、図3(a)は容器が第1状態の場合を示し、図3(b)は容器が第2状態の場合を示している。
【図4】図1に示した容器処理装置によって円形の容器を処理する際の要部の正面図。
【図5】本発明の他の実施例を示す要部の正面図。
【図6】本発明の他の実施例においてカメラが撮影したバケットと容器の投影画像を示す図。
【図7】従来技術を示す要部の正面図。
【発明を実施するための形態】
【0008】
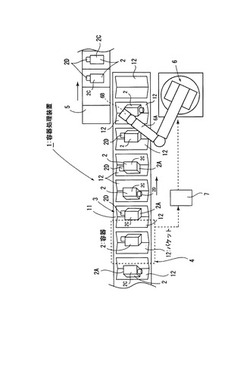
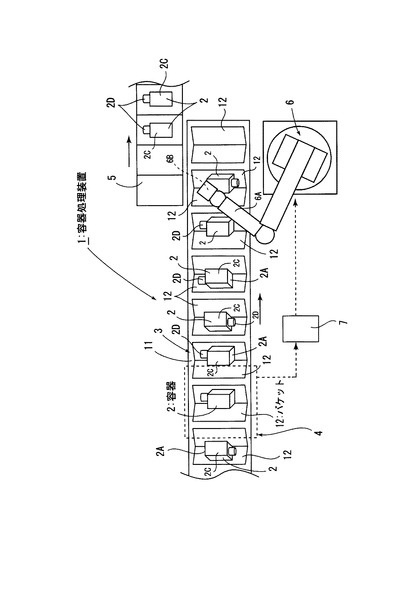
以下、図示実施例について本発明を説明すると、図1において1は容器処理装置であり、この容器処理装置1は、横転状態の角型の容器2を矢印で示す搬送方向に搬送する第1搬送コンベヤ3と、この第1搬送コンベヤ3の搬送経路の上方に配置されて、第1搬送コンベヤ3が搬送する横転状態の容器2の投影画像を撮影するカメラ4と、上記第1搬送コンベヤ3における下流側の隣接位置に配置されて、第1搬送コンベヤ3上から容器2を取り出して第2搬送コンベヤ5上へ受け渡すロボット6と、上記カメラ4が撮影した横転状態の容器2の画像を基にして上記ロボット6の作動を制御する制御手段7とを備えている。
【0009】
図1ないし図2に示すように、容器処理装置1の処理対象となる角型の容器2は、正方形をした平坦な底部2Aと、4箇所の平坦な側面2Bからなる角柱状の本体部2Cと、本体部2Cの上部から連続する円筒状の首部2Dとを備えている。底部2Aの中心と首部2Dの中心(軸心)とを結ぶ線が容器2の中心C(軸心)となっている。本実施例においては、角型の容器2は、横転状態において図示しない上流側の供給位置で第1搬送コンベヤ3上に供給されるようになっている。
第1搬送コンベヤ3は、図示しないモータによって矢印で示す搬送方向に走行される無端状ベルト11と、この無端状ベルト11に長手方向(搬送方向)の所定間隔毎に配置されて容器2を収容する複数のバケット12とを備えている。
【0010】
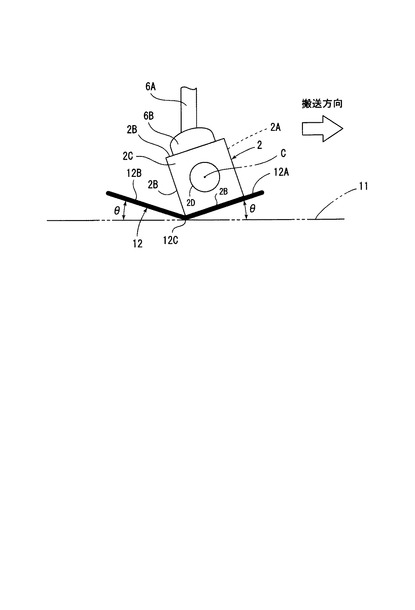
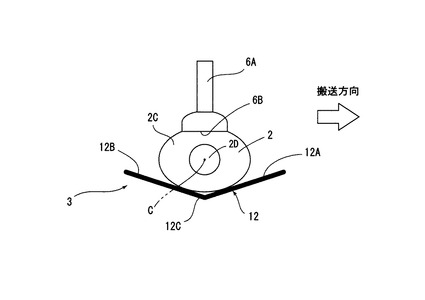
バケット12は、断面が略V字形となる板状部材から構成されており、バケット12の最下端位置となる搬送方向における中心12Cが無端状ベルト11の長手方向(走行方向)と直交するように各バケット12が無端状ベルト11に連結されている。バケット12は、その中心12Cを挟んで搬送方向前方側が前方部12Aとなっており、搬送方向後方側が後方部12Bとなっている。そして、バケット12の前方部12Aと後方部12Bは、水平面である無端状ベルト11の上面に対して同じ傾斜角度θに維持されており(図2参照)、その状態のバケット12内に容器2が収容されるようになっている。以下、便宜上、容器2がバケット12の前方部12Aに載置された状態(図2、図3(a)参照)を第1状態と称し、他方、容器2がバケット12の後方部12Bに載置された状態(図3(b)参照)を第2状態と称すことにする。
図1に示すように、第1搬送コンベヤ3が矢印方向に走行されている状態において、図示しない供給機構によって各バケット12内に順次1個ずつ横転状態の容器2が供給されるようになっている。バケット12内に供給された容器2は、首部2Dが第1搬送コンベヤ3の一側又は他側に位置するようにバケット12内に収容され、かつ、本体部2Cの側面2Bの1つがバケット12の前方部12A又は後方部12B上に載置されるようになっている。このように、容器2は第1状態または第2状態でバケット12内に収容され、それらの収容状態では、本体部2Cと軸心Cは搬送方向と直交し、かつ隣り合う側面2Bの境界となる角部がバケット12の中心12Cに当接した状態となる。
また、上記第1状態または第2状態で容器2がバケット12内に収容されると、容器2の中心Cはバケット12の中心12Cよりも前方部12A側または後方部12B側にずれた状態となり、しかも、容器2の本体部2C(側面2B)は、水平面に対して傾斜した状態となる。そして、このように各バケット12内に収容された容器2は、傾斜状態で上方を向けた本体部2Cの側面2Bをロボットハンド6Aの吸盤6Bによって吸着して保持されてバケット12から取り出されるようになっている(図2参照)。
【0011】
次に、撮影手段としてのカメラ4は、上記第1搬送コンベヤ3の搬送過程の上流側に下方を向けて配置されており、カメラ4の下方を通過していくバケット12内の容器2の投影画像(上方側から撮影した画像)を撮影するようになっている。このカメラ4が撮影したバケット12内の容器2の投影画像は制御手段7に伝達されるようになっており、制御手段7は、カメラ4から伝達された容器2の投影画像を基にして、各バケット12内の容器2が第1状態又は第2状態にあるのか、および首部2Dが第1搬送コンベヤ3の側部のいずれに位置しているかを認識できるようになっている。そして、制御手段7は、カメラ4に撮影された容器2の状態に応じて、ロボット6のロボットハンド6Aの作動を制御して、該ロボットハンド6Aの吸盤6Bによって上方から容器2の本体部2Cの側面2Bを吸着保持するようになっている(図2参照)。
【0012】
本実施例のロボット6は、従来公知の6軸型の産業用ロボットであり、このロボット6のロボットハンド6Aの先端部(下端部)には、容器2を吸着して保持する吸盤6Bが下方に向けて取り付けられている。
ロボット6は制御手段7によって作動を制御されるようになっており、制御手段7は、ロボットハンド6Aの作動と上記吸盤6Bへの負圧の導入と停止の切換作動を制御するようになっている。すなわち、カメラ4が撮影したバケット12内の容器2がロボット6の近くまで搬送されてくると、制御手段7はカメラ4で撮影した容器2の投影画像を基にして、容器2が上記第1状態又は第2状態のいずれであるか、及び首部2Dの位置に応じてロボットハンド6Aを第1搬送コンベヤ3上の容器2の上方まで移動させるとともに、ロボットハンド6Aを所要量だけ下降させる。この時点でロボットハンド6Aの吸盤6Bには負圧を作用させているので、該吸盤6Bの負圧によってバケット12内の容器2の側面2Bが吸着して保持される。
その後、制御手段7は、容器2を保持したロボットハンド6Aを上昇させるので、バケット12内から容器2が取り出される。さらに、その後、制御手段7は、ロボットハンド6Aに保持された容器2の首部2Dの位置に応じて、ロボットハンド6Aを水平面において半回転させて容器2の首部2Dの方向を所定方向に揃えるようになっており、その後、容器2を保持したロボットハンド6Aを第2搬送コンベヤ3上まで移動させてから吸盤6Bによる容器2の保持状態を解放させる。これにより、首部2Dが一定方向に揃えられた状態で第2搬送コンベヤ5上に容器2が受け渡されるようになっている。つまり、ロボットハンド6は第1搬送コンベヤ3上でバケット12内の容器2を吸着してバケット12から取り出し、その後、第2搬送コンベヤ5上へ移送中に容器2の向き一定方向に揃えてから第2搬送コンベヤ5上へ容器2を受け渡すようになっている。したがって、第2搬送コンベヤ5上に受け渡された各容器2は、その首部2Dが一定方向を向けた横転状態となり、その状態で下流側へ移送されるようになっている。
【0013】
しかして、本実施例は、カメラ4が撮影した容器2の投影画像を基にして制御手段7がロボットハンド6Aの作動を制御するに当たって、制御手段7は、ロボットハンド6Aが容器2の本体部2C(側面2B)を保持する際の吸着位置Pをバケット12の中心12Cへ所要量をずらした位置として決定するようにしている。それにより、バケット12内で傾斜状態となった角型の容器2の本体部2C(側面2B)をロボットハンド6Aの吸盤6Bによって確実に保持できるようにしている。
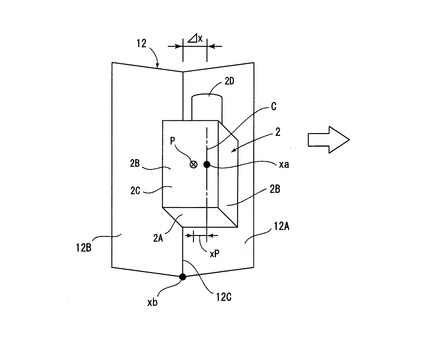
すなわち、上記カメラ4が撮影した容器2の投影画像を基にして制御手段7は次のような処理を行う。先ず、バケット12内の容器2が図3(a)に示す第1状態となっている時には、制御手段7は、容器2の投影画像上において容器2の幅D(投影画像上における隣接する2つの側面2Bを合わせた寸法)を認識し、その幅Dの中心の位置であるXaを算出する。なお、処理対象となる容器2の高さやその本体部2Cの高さは、予め制御手段7に入力されており、制御手段7は、ロボットハンド6Aが本体部2Cを吸着する際の本体部2Cの高さ方向の吸着位置は、高さ方向の中央を吸着保持するものとして予め設定されている。
次に、制御手段7は、収容部としてのバケット12内の最下端位置となる中心12Cの位置Xbを算出する。
次に、制御手段7は、上記XaからXbを減じてΔXを算出する(図3(a)参照)。次に、制御手段7は、ΔXに予め設定されている係数Kを乗じて、位置ずれ量XPを求める。上記係数Kは各容器2に特有の数値であって、容器2の本体部2Cの断面形状によって異なる数値である。例えば、容器2を直立させた際の水平断面の形状が正方形であるか長方形であるかや、各側面2Bの寸法の違い等に応じて異なる数値となる。
この後、制御手段7は、上記投影画像上の中心の位置Xaから上記バケット12の中心12Cの位置Xbへ上記XPずれた位置を、ロボットハンド6Aが容器2の本体部2C(側面2B)を吸着する際の吸着位置Pとして決定する。
そして、制御手段7は、ロボットハンド6Aの作動を制御して、バケット12内の容器2における本体部2C(側面2B)の吸着位置Pをロボットハンド6Aの吸盤6Bによって吸着して保持させる。この時、上方から側面2Bを保持する吸盤6Bの全域は、側面2Bに対して搬送方向において実質的に位置ずれすることなく側面2Bと重合する(図2参照)。そのため、容器2の側面2Bをロボットハンド6Aの吸盤6Bによって確実に吸着して保持することができる。その後は、前述したように、制御手段7によって制御されるロボットハンド6Aは、保持した容器2をバケット12から取り出して向きを一定に揃えてから第2搬送コンベヤ5上に受け渡すようになっている。
【0014】
他方、バケット12内の容器2が図3(b)に示す第2状態の場合には、制御手段7は、上述した第1状態の場合とは逆に、ロボットハンド6Aによる容器2の吸着位置Pとしてバケット12の中心12Cへずらした位置(最下端位置側へずらした位置)として決定する。つまり、制御手段7は、先ず、カメラ4が撮影した容器2の投影画像において、容器2の投影画像上において容器2の幅D’を認識し、その幅D’の中心の位置であるXa’を算出する。
次に、制御手段7は、収容部としてのバケット12内の最下端位置となる中心12Cの位置Xbを算出する。
次に、制御手段7は、上記Xa’からXbを減じてΔX’を算出する。
次に、制御手段7は、ΔX’に上記係数Kを乗じて、位置ずれ量XP’を求める。この後、制御手段7は、上記投影画像上の中心の位置Xa’から上記バケット12の中心12Cの位置Xbへ上記XP’ずれた位置を、ロボットハンド6Aが容器2の本体部2C(2B)を吸着する際の吸着位置Pとして決定する。
この後、ロボットハンド6Aの吸盤6Bによって容器2の本体部2C(側面2B)における吸着位置Pを吸着して保持する。
本実施例においては、上述のようにして、ロボットハンド6Aが容器2を吸着するための吸着位置Pを制御手段7が決定し、その後、制御手段7は、ロボットハンド6Aの作動を制御して容器2の本体部2C(側面2B)における上記吸着位置Pを吸着して保持させるようになっている。
【0015】
以上のように、本実施例の容器処理装置1は、バケット12内の容器2をロボットハンド6Aによって吸着して取り出すに当たって、カメラ4による容器2の投影画像を基にして、制御手段7は、ロボットハンド6Aの吸盤6Bによる容器2の吸着位置Pを好適な箇所へ位置をずらすようになっている。つまり、バケット12内の容器2が第1状態または第2状態であるかに応じて、バケット12の最下端位置である中心12C側へ所定量ずれた位置を、ロボットハンド6Aによる容器2の吸着位置Pとして決定している。そのため、本実施例によれば、図2に実線で示すように、ロボットハンド6Aの吸盤6Bによって容器2の本体部2Cにおける傾斜状態の側面2Bを確実に吸着保持してバケット12から取り出すことができる。
【0016】
このように、本実施例においては、第1搬送コンベヤ3の各バケット12内に横転状態で、かつ本体部2Cが傾斜状態で収容された容器2をロボットハンド6Aの吸盤6Bによって確実に吸着保持してバケット12から取り出すことができる。そして、前述したように、ロボットハンド6Aによって保持されてバケット12から取り出された各容器2は、第2搬送コンベヤ5に向けて移送されつつ、首部2Dを所定方向に揃えられてから第2搬送コンベヤ5上へ受け渡される。
【0017】
なお、以上の説明は、バケット12内に横転状態の角型の容器2を収容し、各バケット12からロボットハンド6Aによって容器2を保持して取り出す場合について述べているが、図4に示すように、容器処理装置1によって断面が円形の容器2を処理することができる。この場合には、バケット12内に収容された円形の容器2は、容器2の首部2Dの位置が搬送方向の左右両側のいずれに位置していても、容器2の中心Cとバケット12の中心12Cとが投影画像上において一致する。そのため、容器処理装置1によって円形の容器2を処理する場合には、ロボットハンド6Aによる容器2の吸着位置Pを上記角型容器2の場合のようにバケット12の中心12C側へ位置をずらす必要はない。そのため、制御手段7は、バケット12内の円形の容器2をカメラ4で撮影した際の投影画像上においては、円形の容器2の軸心C(中心)となる本体部2Cを吸着位置Pとして決定するようにしている。
以上のように、本実施例の容器処理装置1は、バケット12内に角型の容器2だけでなく円形の容器2をも収容することが可能であり、それらの2種類の容器を確実に吸着保持してバケット12内から取り出すことが可能である。したがって、本実施例によれば、従来と比較して汎用性が高く、かつ処理速度が速い容器処理装置1を提供することができる。
【0018】
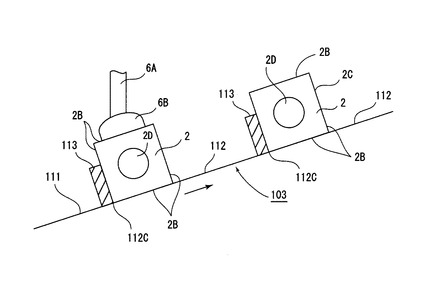
次に、図5は本発明の第1搬送コンベヤ103に関する他の実施例を示したものである。すなわち、この実施例においては、第1搬送コンベヤ103全体を傾斜させて配置するとともに、上記バケット12に代わる収容部112の構成を採用している。つまり、第1搬送コンベヤ103は搬送方向前方が搬送方向後方よりも高くなるように傾斜させて配置されている。また、第1搬送コンベヤ103は、無端状ベルト111と、その走行方向に等間隔で配置された多数の仕切板113を備えている。各仕切板113は、無端状ベルト111の走行方向と直交させて配置されており、相前後する仕切板113とそれらの間に位置する無端状ベルト111の載置面とによって、容器2を収容する収容部112が構成されている。この実施例においては、無端状ベルト111と仕切板113との境界部が収容部112の最下端位置112Cとなる。
そして、このように構成された第1搬送コンベヤ103においては、収容部112に容器2が供給されると、第1搬送コンベヤ103全体が傾斜しているために、収容部112内の容器2は、仕切板113に当接して向きを揃えられる。
このように、上記第1の実施例における第1搬送コンベヤ3の代わりに図5に示す第1搬送コンベヤ103を用いることができ、このような実施例においても上述した第1実施例の場合と同様の作用・効果を得ることが可能である。
【0019】
次に、上記制御手段7に関する他の実施例として次のような処理を採用することができる。すなわち、図6に示すように、カメラ4が撮影したバケット12内の容器2の投影画像上において、容器2の首部2Dの中心位置、すなわち容器2の軸心Cの位置を算出する。そこを基点として、制御手段7は、上述した第1の実施例と同様に吸着位置Pを決定する。
つまり、制御手段7は、投影画像上において容器2の首部2Dの中心位置Xa(容器2の軸心Cの位置)を算出したら、次に、バケット12の最下端位置である中心12Cの位置Xbを算出する。
次に、制御手段7は、上記XaからXbを減じてΔXを算出する。次に、制御手段7は、ΔXに予め設定されている係数Kを乗じて、位置ずれ量XPを求める。
この後、制御手段7は、上記投影画像上の中心の位置Xaから上記中心12Cの位置Xb側へ上記XPずれた位置を、ロボットハンド6Aが容器2の本体部2C(側面2B)を吸着する際の吸着位置Pとして決定する。
このような構成の制御手段7を採用しても、上述した第1の実施例と同様の作用・効果を得ることができる。
なお、上述した各実施例においては、円筒状の首部2Dを備えた容器2を前提として説明しているが、容器処理装置1の処理対象としては円筒状の首部2Dがない容器2であっても良いことは勿論である。
また、上述した各実施例は、第1搬送コンベヤ3によって搬送される容器2が搬送方向に対して直交状態で搬送される場合について説明したが、第1搬送コンベヤ3によって容器2を搬送方向と平行な状態で搬送する場合にも本実施例の容器処理装置1によって対応することができる。
【符号の説明】
【0020】
1‥容器処理装置 2‥容器
2C‥容器の本体部 3‥第1搬送コンベヤ
4‥カメラ(撮影手段) 6A‥ロボットハンド(取り出し手段)
6B‥吸盤 7‥制御手段
12‥バケット(収容部) 12C‥中心(最下端位置)
P‥吸着位置
【技術分野】
【0001】
本発明は容器処理装置に関し、より詳しくは、横転状態の角型の容器を取り出して移送する場合に好適な容器処理装置に関する。
【背景技術】
【0002】
従来、横転状態の容器を搬送する第1搬送コンベヤと、この第1搬送コンベヤ上の容器を保持して次工程の第2搬送コンベヤへ受け渡すロボットとを備えた容器処理装置は知られている(例えば特許文献1)。
この特許文献1の容器処理装置においては、搬送方向の前方側よりも後方側の高さが低くなるように第1搬送コンベヤを傾斜させて配置してあり、かつ第1搬送コンベヤの載置面の所定間隔毎に仕切り部材を配置している。そのため、第1搬送コンベヤによって搬送される横転状態の容器は、上記仕切り部材に当接した状態で下流に向けて搬送される。つまり、第1搬送コンベヤによって搬送される横転状態の容器は、その本体部が搬送方向に対して直交方向に姿勢が揃えられているので、ロボットによって容器を確実に保持して第2搬送コンベヤへ受け渡すことができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4014235号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記特許文献1の容器処理装置は、断面が円形の容器を保持して受け渡すことが前提となっているため、特許文献1の容器処理装置によって容器本体部の断面が角型の容器を処理しようとすると次のような問題が生じる。すなわち、特許文献1においては、傾斜した第1搬送コンベヤによって角型の容器を搬送すると、本体部の側面が水平面に対して傾斜した状態となる(図7参照)。横転した容器の本体部をロボットハンドによって上方から吸着して保持する場合、撮影手段からの画像から容器の本体部の幅方向における中心位置を算出し、その中心位置を吸着するようにしている。
ところが、本体部の側面が水平面に対して傾斜した状態の容器を上方から撮影した場合、隣接する側面も撮影されるため、本体部の側面が水平な状態と比較して本体部の幅を広く認識してしまい、算出される中心位置も本来の側面の中心位置からずれてしまっていた。そのため、本体部の側面が水平面に対して傾斜した状態の容器の本体部をロボットハンドによって上方から吸着して保持しようとすると、容器の本体部の角にロボットハンドの吸盤の一部が当接したり、あるいは本体部の側面から大きくずれた位置を吸盤で吸着することになり、そのような場合にはロボットハンドの吸盤に負圧漏れが生じて角型の容器を保持できないという問題が生じる。
【課題を解決するための手段】
【0005】
上述した事情に鑑み、第1の本発明は、横転状態の角型の容器を収容する複数の収容部を有し、かつ該収容部内に容器を収容して搬送する搬送コンベヤと、上記搬送コンベヤによって搬送される容器を撮影する撮影手段と、上記搬送コンベヤの収容部内の容器を吸着して取り出す取り出し手段と、上記撮影手段が撮影した容器の画像を基にして上記取り出し手段の作動を制御する制御手段とを備えた容器処理装置であって、
上記搬送コンベヤの各収容部を水平面に対して傾斜させて配置して、各収容部内に横転状態の容器が収容されると、該容器の本体部の側面が収容部の最下端位置に当接して位置決めされるように構成し、
また、上記制御手段は、上記撮影手段が撮影した容器の投影画像を基にして、該投影画像において容器の本体部の幅方向の中心位置を求めて、該中心位置よりも上記収容部の最下端位置へ所定量ずれた位置を、上記取り出し手段が容器を吸着するための吸着位置として決定し、さらに容器の本体部における上記吸着位置を上記取り出し手段に吸着させるものである。
また、第2の本発明は、横転状態の角型の容器を収容する複数の収容部を有し、かつ該収容部内に容器を収容して搬送する搬送コンベヤと、上記搬送コンベヤによって搬送される容器を撮影する撮影手段と、上記搬送コンベヤの収容部内の容器を吸着して取り出す取り出し手段と、上記撮影手段が撮影した容器の画像を基にして上記取り出し手段の作動を制御する制御手段とを備えた容器処理装置であって、
上記搬送コンベヤの各収容部を水平面に対して傾斜させて配置して、各収容部内に横転状態の容器が収容されると、該容器の本体部の側面が収容部の最下端位置に当接して位置決めされるように構成し、
また、上記制御手段は、上記撮影手段が撮影した収容部内の容器の投影画像を基にして、該投影画像において容器の首部の幅方向の中心位置を求めて、該容器の首部の中心位置よりも上記収容部の最下端位置へ所定量ずれた位置を、容器を吸着するための吸着位置として決定し、さらに上記容器の本体部における上記吸着位置を上記取り出し手段に吸着させるものである。
【発明の効果】
【0006】
上述した構成によれば、角型の容器を取り出し手段によって確実に吸着して収容部から取り出すことができる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施例を示す平面図。
【図2】図1の要部の正面図。
【図3】図1に示すカメラが撮影した容器の投影画像を示す図であり、図3(a)は容器が第1状態の場合を示し、図3(b)は容器が第2状態の場合を示している。
【図4】図1に示した容器処理装置によって円形の容器を処理する際の要部の正面図。
【図5】本発明の他の実施例を示す要部の正面図。
【図6】本発明の他の実施例においてカメラが撮影したバケットと容器の投影画像を示す図。
【図7】従来技術を示す要部の正面図。
【発明を実施するための形態】
【0008】
以下、図示実施例について本発明を説明すると、図1において1は容器処理装置であり、この容器処理装置1は、横転状態の角型の容器2を矢印で示す搬送方向に搬送する第1搬送コンベヤ3と、この第1搬送コンベヤ3の搬送経路の上方に配置されて、第1搬送コンベヤ3が搬送する横転状態の容器2の投影画像を撮影するカメラ4と、上記第1搬送コンベヤ3における下流側の隣接位置に配置されて、第1搬送コンベヤ3上から容器2を取り出して第2搬送コンベヤ5上へ受け渡すロボット6と、上記カメラ4が撮影した横転状態の容器2の画像を基にして上記ロボット6の作動を制御する制御手段7とを備えている。
【0009】
図1ないし図2に示すように、容器処理装置1の処理対象となる角型の容器2は、正方形をした平坦な底部2Aと、4箇所の平坦な側面2Bからなる角柱状の本体部2Cと、本体部2Cの上部から連続する円筒状の首部2Dとを備えている。底部2Aの中心と首部2Dの中心(軸心)とを結ぶ線が容器2の中心C(軸心)となっている。本実施例においては、角型の容器2は、横転状態において図示しない上流側の供給位置で第1搬送コンベヤ3上に供給されるようになっている。
第1搬送コンベヤ3は、図示しないモータによって矢印で示す搬送方向に走行される無端状ベルト11と、この無端状ベルト11に長手方向(搬送方向)の所定間隔毎に配置されて容器2を収容する複数のバケット12とを備えている。
【0010】
バケット12は、断面が略V字形となる板状部材から構成されており、バケット12の最下端位置となる搬送方向における中心12Cが無端状ベルト11の長手方向(走行方向)と直交するように各バケット12が無端状ベルト11に連結されている。バケット12は、その中心12Cを挟んで搬送方向前方側が前方部12Aとなっており、搬送方向後方側が後方部12Bとなっている。そして、バケット12の前方部12Aと後方部12Bは、水平面である無端状ベルト11の上面に対して同じ傾斜角度θに維持されており(図2参照)、その状態のバケット12内に容器2が収容されるようになっている。以下、便宜上、容器2がバケット12の前方部12Aに載置された状態(図2、図3(a)参照)を第1状態と称し、他方、容器2がバケット12の後方部12Bに載置された状態(図3(b)参照)を第2状態と称すことにする。
図1に示すように、第1搬送コンベヤ3が矢印方向に走行されている状態において、図示しない供給機構によって各バケット12内に順次1個ずつ横転状態の容器2が供給されるようになっている。バケット12内に供給された容器2は、首部2Dが第1搬送コンベヤ3の一側又は他側に位置するようにバケット12内に収容され、かつ、本体部2Cの側面2Bの1つがバケット12の前方部12A又は後方部12B上に載置されるようになっている。このように、容器2は第1状態または第2状態でバケット12内に収容され、それらの収容状態では、本体部2Cと軸心Cは搬送方向と直交し、かつ隣り合う側面2Bの境界となる角部がバケット12の中心12Cに当接した状態となる。
また、上記第1状態または第2状態で容器2がバケット12内に収容されると、容器2の中心Cはバケット12の中心12Cよりも前方部12A側または後方部12B側にずれた状態となり、しかも、容器2の本体部2C(側面2B)は、水平面に対して傾斜した状態となる。そして、このように各バケット12内に収容された容器2は、傾斜状態で上方を向けた本体部2Cの側面2Bをロボットハンド6Aの吸盤6Bによって吸着して保持されてバケット12から取り出されるようになっている(図2参照)。
【0011】
次に、撮影手段としてのカメラ4は、上記第1搬送コンベヤ3の搬送過程の上流側に下方を向けて配置されており、カメラ4の下方を通過していくバケット12内の容器2の投影画像(上方側から撮影した画像)を撮影するようになっている。このカメラ4が撮影したバケット12内の容器2の投影画像は制御手段7に伝達されるようになっており、制御手段7は、カメラ4から伝達された容器2の投影画像を基にして、各バケット12内の容器2が第1状態又は第2状態にあるのか、および首部2Dが第1搬送コンベヤ3の側部のいずれに位置しているかを認識できるようになっている。そして、制御手段7は、カメラ4に撮影された容器2の状態に応じて、ロボット6のロボットハンド6Aの作動を制御して、該ロボットハンド6Aの吸盤6Bによって上方から容器2の本体部2Cの側面2Bを吸着保持するようになっている(図2参照)。
【0012】
本実施例のロボット6は、従来公知の6軸型の産業用ロボットであり、このロボット6のロボットハンド6Aの先端部(下端部)には、容器2を吸着して保持する吸盤6Bが下方に向けて取り付けられている。
ロボット6は制御手段7によって作動を制御されるようになっており、制御手段7は、ロボットハンド6Aの作動と上記吸盤6Bへの負圧の導入と停止の切換作動を制御するようになっている。すなわち、カメラ4が撮影したバケット12内の容器2がロボット6の近くまで搬送されてくると、制御手段7はカメラ4で撮影した容器2の投影画像を基にして、容器2が上記第1状態又は第2状態のいずれであるか、及び首部2Dの位置に応じてロボットハンド6Aを第1搬送コンベヤ3上の容器2の上方まで移動させるとともに、ロボットハンド6Aを所要量だけ下降させる。この時点でロボットハンド6Aの吸盤6Bには負圧を作用させているので、該吸盤6Bの負圧によってバケット12内の容器2の側面2Bが吸着して保持される。
その後、制御手段7は、容器2を保持したロボットハンド6Aを上昇させるので、バケット12内から容器2が取り出される。さらに、その後、制御手段7は、ロボットハンド6Aに保持された容器2の首部2Dの位置に応じて、ロボットハンド6Aを水平面において半回転させて容器2の首部2Dの方向を所定方向に揃えるようになっており、その後、容器2を保持したロボットハンド6Aを第2搬送コンベヤ3上まで移動させてから吸盤6Bによる容器2の保持状態を解放させる。これにより、首部2Dが一定方向に揃えられた状態で第2搬送コンベヤ5上に容器2が受け渡されるようになっている。つまり、ロボットハンド6は第1搬送コンベヤ3上でバケット12内の容器2を吸着してバケット12から取り出し、その後、第2搬送コンベヤ5上へ移送中に容器2の向き一定方向に揃えてから第2搬送コンベヤ5上へ容器2を受け渡すようになっている。したがって、第2搬送コンベヤ5上に受け渡された各容器2は、その首部2Dが一定方向を向けた横転状態となり、その状態で下流側へ移送されるようになっている。
【0013】
しかして、本実施例は、カメラ4が撮影した容器2の投影画像を基にして制御手段7がロボットハンド6Aの作動を制御するに当たって、制御手段7は、ロボットハンド6Aが容器2の本体部2C(側面2B)を保持する際の吸着位置Pをバケット12の中心12Cへ所要量をずらした位置として決定するようにしている。それにより、バケット12内で傾斜状態となった角型の容器2の本体部2C(側面2B)をロボットハンド6Aの吸盤6Bによって確実に保持できるようにしている。
すなわち、上記カメラ4が撮影した容器2の投影画像を基にして制御手段7は次のような処理を行う。先ず、バケット12内の容器2が図3(a)に示す第1状態となっている時には、制御手段7は、容器2の投影画像上において容器2の幅D(投影画像上における隣接する2つの側面2Bを合わせた寸法)を認識し、その幅Dの中心の位置であるXaを算出する。なお、処理対象となる容器2の高さやその本体部2Cの高さは、予め制御手段7に入力されており、制御手段7は、ロボットハンド6Aが本体部2Cを吸着する際の本体部2Cの高さ方向の吸着位置は、高さ方向の中央を吸着保持するものとして予め設定されている。
次に、制御手段7は、収容部としてのバケット12内の最下端位置となる中心12Cの位置Xbを算出する。
次に、制御手段7は、上記XaからXbを減じてΔXを算出する(図3(a)参照)。次に、制御手段7は、ΔXに予め設定されている係数Kを乗じて、位置ずれ量XPを求める。上記係数Kは各容器2に特有の数値であって、容器2の本体部2Cの断面形状によって異なる数値である。例えば、容器2を直立させた際の水平断面の形状が正方形であるか長方形であるかや、各側面2Bの寸法の違い等に応じて異なる数値となる。
この後、制御手段7は、上記投影画像上の中心の位置Xaから上記バケット12の中心12Cの位置Xbへ上記XPずれた位置を、ロボットハンド6Aが容器2の本体部2C(側面2B)を吸着する際の吸着位置Pとして決定する。
そして、制御手段7は、ロボットハンド6Aの作動を制御して、バケット12内の容器2における本体部2C(側面2B)の吸着位置Pをロボットハンド6Aの吸盤6Bによって吸着して保持させる。この時、上方から側面2Bを保持する吸盤6Bの全域は、側面2Bに対して搬送方向において実質的に位置ずれすることなく側面2Bと重合する(図2参照)。そのため、容器2の側面2Bをロボットハンド6Aの吸盤6Bによって確実に吸着して保持することができる。その後は、前述したように、制御手段7によって制御されるロボットハンド6Aは、保持した容器2をバケット12から取り出して向きを一定に揃えてから第2搬送コンベヤ5上に受け渡すようになっている。
【0014】
他方、バケット12内の容器2が図3(b)に示す第2状態の場合には、制御手段7は、上述した第1状態の場合とは逆に、ロボットハンド6Aによる容器2の吸着位置Pとしてバケット12の中心12Cへずらした位置(最下端位置側へずらした位置)として決定する。つまり、制御手段7は、先ず、カメラ4が撮影した容器2の投影画像において、容器2の投影画像上において容器2の幅D’を認識し、その幅D’の中心の位置であるXa’を算出する。
次に、制御手段7は、収容部としてのバケット12内の最下端位置となる中心12Cの位置Xbを算出する。
次に、制御手段7は、上記Xa’からXbを減じてΔX’を算出する。
次に、制御手段7は、ΔX’に上記係数Kを乗じて、位置ずれ量XP’を求める。この後、制御手段7は、上記投影画像上の中心の位置Xa’から上記バケット12の中心12Cの位置Xbへ上記XP’ずれた位置を、ロボットハンド6Aが容器2の本体部2C(2B)を吸着する際の吸着位置Pとして決定する。
この後、ロボットハンド6Aの吸盤6Bによって容器2の本体部2C(側面2B)における吸着位置Pを吸着して保持する。
本実施例においては、上述のようにして、ロボットハンド6Aが容器2を吸着するための吸着位置Pを制御手段7が決定し、その後、制御手段7は、ロボットハンド6Aの作動を制御して容器2の本体部2C(側面2B)における上記吸着位置Pを吸着して保持させるようになっている。
【0015】
以上のように、本実施例の容器処理装置1は、バケット12内の容器2をロボットハンド6Aによって吸着して取り出すに当たって、カメラ4による容器2の投影画像を基にして、制御手段7は、ロボットハンド6Aの吸盤6Bによる容器2の吸着位置Pを好適な箇所へ位置をずらすようになっている。つまり、バケット12内の容器2が第1状態または第2状態であるかに応じて、バケット12の最下端位置である中心12C側へ所定量ずれた位置を、ロボットハンド6Aによる容器2の吸着位置Pとして決定している。そのため、本実施例によれば、図2に実線で示すように、ロボットハンド6Aの吸盤6Bによって容器2の本体部2Cにおける傾斜状態の側面2Bを確実に吸着保持してバケット12から取り出すことができる。
【0016】
このように、本実施例においては、第1搬送コンベヤ3の各バケット12内に横転状態で、かつ本体部2Cが傾斜状態で収容された容器2をロボットハンド6Aの吸盤6Bによって確実に吸着保持してバケット12から取り出すことができる。そして、前述したように、ロボットハンド6Aによって保持されてバケット12から取り出された各容器2は、第2搬送コンベヤ5に向けて移送されつつ、首部2Dを所定方向に揃えられてから第2搬送コンベヤ5上へ受け渡される。
【0017】
なお、以上の説明は、バケット12内に横転状態の角型の容器2を収容し、各バケット12からロボットハンド6Aによって容器2を保持して取り出す場合について述べているが、図4に示すように、容器処理装置1によって断面が円形の容器2を処理することができる。この場合には、バケット12内に収容された円形の容器2は、容器2の首部2Dの位置が搬送方向の左右両側のいずれに位置していても、容器2の中心Cとバケット12の中心12Cとが投影画像上において一致する。そのため、容器処理装置1によって円形の容器2を処理する場合には、ロボットハンド6Aによる容器2の吸着位置Pを上記角型容器2の場合のようにバケット12の中心12C側へ位置をずらす必要はない。そのため、制御手段7は、バケット12内の円形の容器2をカメラ4で撮影した際の投影画像上においては、円形の容器2の軸心C(中心)となる本体部2Cを吸着位置Pとして決定するようにしている。
以上のように、本実施例の容器処理装置1は、バケット12内に角型の容器2だけでなく円形の容器2をも収容することが可能であり、それらの2種類の容器を確実に吸着保持してバケット12内から取り出すことが可能である。したがって、本実施例によれば、従来と比較して汎用性が高く、かつ処理速度が速い容器処理装置1を提供することができる。
【0018】
次に、図5は本発明の第1搬送コンベヤ103に関する他の実施例を示したものである。すなわち、この実施例においては、第1搬送コンベヤ103全体を傾斜させて配置するとともに、上記バケット12に代わる収容部112の構成を採用している。つまり、第1搬送コンベヤ103は搬送方向前方が搬送方向後方よりも高くなるように傾斜させて配置されている。また、第1搬送コンベヤ103は、無端状ベルト111と、その走行方向に等間隔で配置された多数の仕切板113を備えている。各仕切板113は、無端状ベルト111の走行方向と直交させて配置されており、相前後する仕切板113とそれらの間に位置する無端状ベルト111の載置面とによって、容器2を収容する収容部112が構成されている。この実施例においては、無端状ベルト111と仕切板113との境界部が収容部112の最下端位置112Cとなる。
そして、このように構成された第1搬送コンベヤ103においては、収容部112に容器2が供給されると、第1搬送コンベヤ103全体が傾斜しているために、収容部112内の容器2は、仕切板113に当接して向きを揃えられる。
このように、上記第1の実施例における第1搬送コンベヤ3の代わりに図5に示す第1搬送コンベヤ103を用いることができ、このような実施例においても上述した第1実施例の場合と同様の作用・効果を得ることが可能である。
【0019】
次に、上記制御手段7に関する他の実施例として次のような処理を採用することができる。すなわち、図6に示すように、カメラ4が撮影したバケット12内の容器2の投影画像上において、容器2の首部2Dの中心位置、すなわち容器2の軸心Cの位置を算出する。そこを基点として、制御手段7は、上述した第1の実施例と同様に吸着位置Pを決定する。
つまり、制御手段7は、投影画像上において容器2の首部2Dの中心位置Xa(容器2の軸心Cの位置)を算出したら、次に、バケット12の最下端位置である中心12Cの位置Xbを算出する。
次に、制御手段7は、上記XaからXbを減じてΔXを算出する。次に、制御手段7は、ΔXに予め設定されている係数Kを乗じて、位置ずれ量XPを求める。
この後、制御手段7は、上記投影画像上の中心の位置Xaから上記中心12Cの位置Xb側へ上記XPずれた位置を、ロボットハンド6Aが容器2の本体部2C(側面2B)を吸着する際の吸着位置Pとして決定する。
このような構成の制御手段7を採用しても、上述した第1の実施例と同様の作用・効果を得ることができる。
なお、上述した各実施例においては、円筒状の首部2Dを備えた容器2を前提として説明しているが、容器処理装置1の処理対象としては円筒状の首部2Dがない容器2であっても良いことは勿論である。
また、上述した各実施例は、第1搬送コンベヤ3によって搬送される容器2が搬送方向に対して直交状態で搬送される場合について説明したが、第1搬送コンベヤ3によって容器2を搬送方向と平行な状態で搬送する場合にも本実施例の容器処理装置1によって対応することができる。
【符号の説明】
【0020】
1‥容器処理装置 2‥容器
2C‥容器の本体部 3‥第1搬送コンベヤ
4‥カメラ(撮影手段) 6A‥ロボットハンド(取り出し手段)
6B‥吸盤 7‥制御手段
12‥バケット(収容部) 12C‥中心(最下端位置)
P‥吸着位置
【特許請求の範囲】
【請求項1】
横転状態の角型の容器を収容する複数の収容部を有し、かつ該収容部内に容器を収容して搬送する搬送コンベヤと、上記搬送コンベヤによって搬送される容器を撮影する撮影手段と、上記搬送コンベヤの収容部内の容器を吸着して取り出す取り出し手段と、上記撮影手段が撮影した容器の画像を基にして上記取り出し手段の作動を制御する制御手段とを備えた容器処理装置であって、
上記搬送コンベヤの各収容部を水平面に対して傾斜させて配置して、各収容部内に横転状態の容器が収容されると、該容器の本体部の側面が収容部の最下端位置に当接して位置決めされるように構成し、
また、上記制御手段は、上記撮影手段が撮影した容器の投影画像を基にして、該投影画像において容器の本体部の幅方向の中心位置を求めて、該中心位置よりも上記収容部の最下端位置へ所定量ずれた位置を、上記取り出し手段が容器を吸着するための吸着位置として決定し、さらに容器の本体部における上記吸着位置を上記取り出し手段に吸着させることを特徴とする容器処理装置。
【請求項2】
横転状態の角型の容器を収容する複数の収容部を有し、かつ該収容部内に容器を収容して搬送する搬送コンベヤと、上記搬送コンベヤによって搬送される容器を撮影する撮影手段と、上記搬送コンベヤの収容部内の容器を吸着して取り出す取り出し手段と、上記撮影手段が撮影した容器の画像を基にして上記取り出し手段の作動を制御する制御手段とを備えた容器処理装置であって、
上記搬送コンベヤの各収容部を水平面に対して傾斜させて配置して、各収容部内に横転状態の容器が収容されると、該容器の本体部の側面が収容部の最下端位置に当接して位置決めされるように構成し、
また、上記制御手段は、上記撮影手段が撮影した収容部内の容器の投影画像を基にして、該投影画像において容器の首部の幅方向の中心位置を求めて、該容器の首部の中心位置よりも上記収容部の最下端位置へ所定量ずれた位置を、容器を吸着するための吸着位置として決定し、さらに上記容器の本体部における上記吸着位置を上記取り出し手段に吸着させることを特徴とする容器処理装置。
【請求項3】
上記搬送コンベヤの収容部は、角型の容器だけでなく断面が円形の容器をも収容可能に構成されており、上記搬送コンベヤの収容部に円形の容器が収容されて搬送される際には、上記制御手段は、上記撮影手段が撮影した容器の投影画像における容器の本体部の搬送方向の中心位置を求めて、該中心位置を上記吸着位置として決定することを特徴する請求項1又は請求項2に記載の容器処理装置。
【請求項4】
上記搬送コンベヤの各収容部は断面が略V字形となった板状のバケットからなり、該収容部としてのバケットは、搬送方向における中心となる最下端位置が搬送方向に対して直交するように配置されるとともに、上記中心を挟んで搬送方向前方側となる前方部と後方側となる後方部とが同じ傾斜角度に維持されることを特徴とする請求項1から請求項3のいずれかに記載の容器処理装置。
【請求項1】
横転状態の角型の容器を収容する複数の収容部を有し、かつ該収容部内に容器を収容して搬送する搬送コンベヤと、上記搬送コンベヤによって搬送される容器を撮影する撮影手段と、上記搬送コンベヤの収容部内の容器を吸着して取り出す取り出し手段と、上記撮影手段が撮影した容器の画像を基にして上記取り出し手段の作動を制御する制御手段とを備えた容器処理装置であって、
上記搬送コンベヤの各収容部を水平面に対して傾斜させて配置して、各収容部内に横転状態の容器が収容されると、該容器の本体部の側面が収容部の最下端位置に当接して位置決めされるように構成し、
また、上記制御手段は、上記撮影手段が撮影した容器の投影画像を基にして、該投影画像において容器の本体部の幅方向の中心位置を求めて、該中心位置よりも上記収容部の最下端位置へ所定量ずれた位置を、上記取り出し手段が容器を吸着するための吸着位置として決定し、さらに容器の本体部における上記吸着位置を上記取り出し手段に吸着させることを特徴とする容器処理装置。
【請求項2】
横転状態の角型の容器を収容する複数の収容部を有し、かつ該収容部内に容器を収容して搬送する搬送コンベヤと、上記搬送コンベヤによって搬送される容器を撮影する撮影手段と、上記搬送コンベヤの収容部内の容器を吸着して取り出す取り出し手段と、上記撮影手段が撮影した容器の画像を基にして上記取り出し手段の作動を制御する制御手段とを備えた容器処理装置であって、
上記搬送コンベヤの各収容部を水平面に対して傾斜させて配置して、各収容部内に横転状態の容器が収容されると、該容器の本体部の側面が収容部の最下端位置に当接して位置決めされるように構成し、
また、上記制御手段は、上記撮影手段が撮影した収容部内の容器の投影画像を基にして、該投影画像において容器の首部の幅方向の中心位置を求めて、該容器の首部の中心位置よりも上記収容部の最下端位置へ所定量ずれた位置を、容器を吸着するための吸着位置として決定し、さらに上記容器の本体部における上記吸着位置を上記取り出し手段に吸着させることを特徴とする容器処理装置。
【請求項3】
上記搬送コンベヤの収容部は、角型の容器だけでなく断面が円形の容器をも収容可能に構成されており、上記搬送コンベヤの収容部に円形の容器が収容されて搬送される際には、上記制御手段は、上記撮影手段が撮影した容器の投影画像における容器の本体部の搬送方向の中心位置を求めて、該中心位置を上記吸着位置として決定することを特徴する請求項1又は請求項2に記載の容器処理装置。
【請求項4】
上記搬送コンベヤの各収容部は断面が略V字形となった板状のバケットからなり、該収容部としてのバケットは、搬送方向における中心となる最下端位置が搬送方向に対して直交するように配置されるとともに、上記中心を挟んで搬送方向前方側となる前方部と後方側となる後方部とが同じ傾斜角度に維持されることを特徴とする請求項1から請求項3のいずれかに記載の容器処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−158406(P2012−158406A)
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2011−17530(P2011−17530)
【出願日】平成23年1月31日(2011.1.31)
【出願人】(000253019)澁谷工業株式会社 (503)
【Fターム(参考)】
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成23年1月31日(2011.1.31)
【出願人】(000253019)澁谷工業株式会社 (503)
【Fターム(参考)】
[ Back to top ]