
容器取り出し供給装置
【課題】 コンベアを停止させずに定速連続走行させつつ、コンベアの搬送部上の物品に容器を配置できる容器取り出し供給装置を提供することを目的とする。
【解決手段】 コンベアの搬送部12は定速連続走行し、容器供給部40はコンベアの搬送方向とその逆方向で往復動可能な移動基台41と移動基台に支持され、マガジンからの容器を取り出す取出部材42A,43Aをもつ供給部材42,43とを有し、移動基台41は、マガジンからの容器の取出し時には停止し、容器を搬送部へ配置するときには搬送部と同速で同方向に移動し、供給部材42,43はマガジン44,45からの容器Dの取出し後、容器の開口を下向きに保持するように回動可能でかつ容器を搬送部上の物品Mに対して覆って配置するように移動基台41に対して移動可能であると共に、容器の搬送部12上の配置後は、移動基台41と供給部材42,43はマガジン44,45からの容器の取出し位置へ戻る。
【解決手段】 コンベアの搬送部12は定速連続走行し、容器供給部40はコンベアの搬送方向とその逆方向で往復動可能な移動基台41と移動基台に支持され、マガジンからの容器を取り出す取出部材42A,43Aをもつ供給部材42,43とを有し、移動基台41は、マガジンからの容器の取出し時には停止し、容器を搬送部へ配置するときには搬送部と同速で同方向に移動し、供給部材42,43はマガジン44,45からの容器Dの取出し後、容器の開口を下向きに保持するように回動可能でかつ容器を搬送部上の物品Mに対して覆って配置するように移動基台41に対して移動可能であると共に、容器の搬送部12上の配置後は、移動基台41と供給部材42,43はマガジン44,45からの容器の取出し位置へ戻る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物品を包装工程にもたらすのに先立ち、該物品をコンベアの搬送部で搬送している際に、該搬送部上の物品に対し覆うように容器を配置する容器取り出し供給装置に関する。
【背景技術】
【0002】
このような装置としては、特許文献1に開示されている装置が知られている。
【0003】
この特許文献1の装置では、間欠走行するコンベア装置に設けられた複数のリテーナのそれぞれが順次停止する特定位置の上方に、多数の空の容器を取出し自在に保持するマガジンが配設されている。このマガジンは、空のカップ容器を多数積載した状態で容器の開口縁部で保持しており、該マガジンの底部に形成された孔部から容器を引き出せるようになっている。
【0004】
上記コンベア装置とマガジンとの間には、容器をマガジンから取出してコンベアの停止時にその搬送部上の物品に対して覆うようにこの搬送部上に配する容器供給装置が設けられている。
【0005】
上記容器供給装置では、吸着部材を有する部材が回動可能かつ上下動可能に支持されていて、吸着部材で容器をマガジンから取り出し、回動と共に下方へ移動して、容器を下向きの状態で、停止している搬送部上の物品を覆うように該容器を配置する。
【特許文献1】実公平6−50321
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した特許文献1の装置にあっては、容器供給装置はコンベアの搬送部が停止時にのみ容器を該搬送部上の物品に対して配置でき、間欠走行中は不可である。したがって、装置の処理能力は低い。仮りに、少しでもこの能力を上げようとして、走行速度あるいは走行立上り速度を大きくしようとすると、容器の転倒、位置のずれ、物品の損傷、コンベアの搬送部への容器の落下供給の失敗等、多くの不具合が生ずる。
【0007】
本発明は、このような不具合をもたらすことなく、コンベアを定速連続走行させつつ容器の配置を行えることとする容器取り出し供給装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る容器取り出し供給装置は、複数の物品を所定間隔をもって搬送する搬送部を有するコンベアと、該搬送部の上方位置に配設され複数の空容器を保持するマガジンと、該マガジンから容器を取り出し該容器の開口を下向きにして上記搬送部上の物品に対して覆うように配置する容器供給部とを備えている。
【0009】
かかる容器取り出し供給装置において、本発明では、コンベアの搬送部は定速連続走行し、容器供給部はコンベアの搬送方向とその逆方向で往復動可能な移動基台と、該移動基台に支持され、マガジンからの容器を取り出す取出部材が設けられた供給部材とを有し、上記移動基台は、マガジンからの容器の取出し時には停止し、容器を搬送部へ配置するときにはコンベアの搬送部と同速で同方向に移動し、供給部材はマガジンからの容器の取出し後、容器の開口を下向きに保持するように回動可能でかつ容器を搬送部上の物品に対して覆って配置するように移動基台に対して移動可能であると共に、容器の搬送部上の配置後は、上記移動基台と供給部材はマガジンからの容器の取出し位置へ戻るようになっていることを特徴としている。
【0010】
このような構成の本発明によると、容器供給部は、移動基台の停止にマガジンから空の容器を取り出し、該移動基台がコンベアの搬送部を同一方向かつ同速で移動しているときに上記容器を搬送部へ配置する。したがって、この容器の配置動作は、コンベアの搬送部が定速連続走行中に、搬送方向における容器供給部と搬送部との間での相対速度のない状態で行われる。
【0011】
本発明において、移動基台はコンベアの搬送方向での移動時に対し戻り方向での移動速度の方が速く設定されていることが好ましい。こうすることにより、容器の取り出し供給動作を次々と高サイクルで行え、装置の処理能力が向上する。
【0012】
本発明では、供給部材はコンベアの搬送方向で複数設けられ、この複数の供給部材が同時に作動するようになっているようにすることができる。こうすることにより、一回当りの動作で多くの容器の配置が行え、この点でも装置の処理能力が向上する。
【0013】
本発明では、供給部材は、例えば、回動自在に支持された供給腕であり、該供給腕の先端に吸着そしてその解除を可能とする吸着部材が取出部材として設けられているようにすることができる。
【発明の効果】
【0014】
本発明は、以上のように、容器供給部によりマガジンから空の容器を取り出し該容器をコンベアの搬送部上の物品に対して配置するときには、この容器供給部はコンベアの搬送方向と同方向で搬送速度と同一速度で移動しており、コンベアは一時的にも停止することなく定速連続走行させることができるので、停止時間がなく装置の高能率化が図れる。又、コンベアの搬送部は定速走行しているので、従来のように搬送部の走行の停止・開示時に物品や容器が不安定になったり位置がずれたりすることもなく、ひいては、物品の包装形態の品質保証が得られる。
【発明を実施するための最良の形態】
【0015】
以下、添付図面の図1ないし図3にもとづき、本発明の一実施形態装置を説明する。
【0016】
図1において、上方位置に第一コンベア装置10、下方位置に第二コンベア装置20、そして両コンベア間に中間受渡装置30が設けられている。又、上記第一コンベア装置10の上方位置には容器供給装置40が設けられていている。
【0017】
第一コンベア装置10は、コンベアチェーン11がA方向に定速で連続走行しており、該コンベアチェーン11には、走行方向で所定間隔をもって板状の複数の支持プレート12が取りつけられている。この支持プレート12がコンベアチェーン11に取りつけられて搬送部を形成している。各支持プレート12は、本実施形態ではコンベアチェーン11の幅方向(図1にて紙面に対し直角方向)に長くなっており、図2のごとく、複数(本実施形態では六つ)の容器Pをこれらの開口部を該支持プレート12に伏せた状態で支持できるようになっている。
【0018】
上記支持プレート12は、図2に見られるように、複数(本実施形態では七つ)の支持アーム13が上記支持プレート12の面上で軸14まわりに往復回動可能かつ図2にて時計まわり方向にばね等(図示せず)により付勢力を受けている。又、これらの七つの支持アーム13は、所定時にこの付勢力に抗した回動力を図示せぬ機構により一括して受けるようになっている。各支持アーム13は容器Pの側面と当接するに適した円弧部13Aが
形成されている。かくして、七つの支持アーム13は付勢力を受けて上記円弧部13Aで六つの容器Pの側面に接触し、容器Pが搬送部たるコンベアチェーン11の下側位置にきても、そのフランジP1で落下防止がなされる状態でこれらの六つの容器Pを支持する。
【0019】
第二コンベア装置20は、第一コンベア装置10と同様なコンベアチェーン21そして支持プレート22を有して搬送部を形成しているが、この第二コンベア装置20の搬送部は、上側を走行するとき、対向せる第一コンベアチェーン11の下側の搬送部とは逆方向Bに定速で連続走行している。支持プレート22は、容器PをそのフランジP1で支持するための支持孔22Aが、第一コンベア装置10の支持プレート12により支持される容器の数と同数だけ形成されている(図3をも参照)。各支持プレート22のこの支持孔22Aは、コンベアチェーン21の幅方向にて、上記第一コンベア装置10の支持プレート12により支持される複数の容器Pに対応した位置に形成されている。
【0020】
中間受渡し装置30は、図1にて上下左右に移動可能で、一つのループを描くように移動駆動を受ける移動基台31に受部材32(図3参照)が取りつけられて構成されている。この受部材32は、図3に見られるように、対をなす部材33,34から成っており、一つの支持プレート12、したがって支持プレート22によって支持される容器の数と同数、すなわち、本実施形態では六対設けられている(図3では三対のみが示されており、他の三対の図示は省略されている。)。各部材33,34は上記第二コンベア装置20の支持プレート22の長手方向と直角な方向、すなわち、コンベアチェーン21の走行方向Bに延びている。上記対をなす部材33,34には、それらの対向縁に、隣接する二つの支持プレート22の支持孔22A同士間の間隔と同じ間隔で、三つの支持プレート12、したがって支持プレート22にわたるように、円弧状の三つ支持縁33A,34Aがそれぞれ形成されている。対をなす受部材33,34は、図3の実線と二点鎖線で示されるように、所定時に接離駆動されるようになっており、接近時に縁部33A,34Aが容器Pの側面に接してフランジP1にて該容器Pを支持し、離反時に容器Pが自由に落下できる。
【0021】
上記中間受渡し装置30の移動基台31は、図1に見られるように、第一コンベア装置10に近づいてコンベアチェーン11の下側に近づいてこれと同速で並走した後に、下方に移動して第二コンベア装置に近づいてコンベアチェーン21の上側に近づいてこれと同速で並走するようにループ軌道Lを描いたサイクル移動を行う。この中間受渡し装置30の三対の受部材33、34は、少なくとも第二コンベア装置20と並走する移動範囲L2で離反した開状態にあり、少なくとも第一コンベア10と並走する範囲L1及び該範囲L1から上記移動範囲L2に到までの範囲は互いに接近した閉状態にある。
【0022】
上記第一コンベア装置10の上方に設けられた容器供給装置40は、図1にて左右に往復動する移動基台41に、供給部材として、上下動かつ回動可能な二つの供給腕42,43が設けられている。供給腕42,43には取出部材としての吸着部材42A,43Aがそれぞれ設けられている。上記移動基台41は、左方へは所定時間の間第一コンベア装置10の上側のチェーンコンベア11と同速で走行し、その後、右方へ早戻りする。この移動基台41が左方に移動している間に、上記供給腕42,43は下方へ移動すると共に吸着部材42A,43Aが下向きとなるように中心42C,43Cまわりに回動し、かつ吸着部材42A,43Aの吸着力は解除される。又、移動基台41が右方へ移動している間は、吸着部材42A,43Aは、上向きに位置して、マガジン44,45にストックされている空の容器Pを吸着して取り出す。なお、このマガジン44,45は固定位置に配設されており、移動基台41が右方の原位置に戻って少しの間停止する間に、上記吸着部材42A,43Aが容器を取り出す。この容器の取出し後、移動基台41は左方へ移動開始する。
【0023】
このような構成に成る本実施形態装置において、容器は第一コンベア装置10から第二コンベア装置20へ、次の要領で受け渡される。
【0024】
(1)第一コンベア装置10の各支持プレート12上には、複数の容器Pの載置予定位置へ物品、この場合、容器Pへ収容されるべき内容物M(図示の例では固形物)が図示せぬ装置により次々と供給される。
【0025】
(2)容器供給装置40は、上記二つの供給腕42,43が作動してマガジン44,45から空容器Pをそれぞれ取り出し、第一コンベア装置10と並走している間に、該第一コンベア装置10の支持プレート12上の内容物Mを覆うようにして、該容器Pを伏せた状態で該支持プレート12上に置く。この容器Pは、図1に見られるように、二つの支持プレート12が通過する間に二つの容器Pが一つおきの支持プレート12上に同時に配されて行く。したがって、容器供給装置40の位置を通過したときには、通過したすべての支持プレート12上に容器Pが載置されている。この容器Pの支持プレート12への載置時には、図2に見られる支持アーム13は回動力を受けていて図2の二点鎖線の位置にあって載置を可としている。そして、容器Pの載置直後には上記回動力が解除されて、付勢力によって、図2における実線位置で、容器を支持する。
【0026】
(3)支持プレート12上で支持アーム13によって支持された容器Pは、コンベアチェーン11の走行が進むとコンベア装置10の下側を移動する。これと共に、中間受渡し装置30が範囲L1においてこのコンベアチェーン11と並走する。このとき、中間受渡し装置30の六対の受部材33,34は、第一コンベア装置10の容器Pの直下にあって同速で移動しており、その間に上記第一コンベア装置10の三つの支持プレート12の支持アーム13が回動力を受けて計18個の容器Pを支持力から解放する。したがって、底部に内容物Mを収めている容器Pは、中間受渡し装置30の六対の受部材33,34へ上記18個の容器Pを落下供給する。該容器PはそれらのフランジP1にて閉位置の受部材33,34の支持縁33A,34によって吊下されるようにして支持される。
【0027】
(4)次に、中間受渡し装置30は、ループLを進み範囲L2にて、第二コンベア装置20の支持プレート22と同速で並走する。この間に、中間受渡し装置30の上記対をなす受部材33,34は開状態となって、18個すべての容器Pを落下せしめて第二コンベア装置20の支持プレート22の支持孔22A内へ供給する。容器Pはそのフランジがこの支持孔22Aの縁部で支持される。かくして、容器Pは第二コンベア装置20によって次工程へもたらされる。
【0028】
(5)本実施形態では、中間受渡し装置30は六対の受部材が同時に18個の容器の受授を行うようになっているので、第一コンベア装置10の次の三つの支持プレート12が次の18個の容器を上記範囲L1にもたらすまでに、該範囲L1で並走するように移動し、上記18個すべての容器Pについて受授を完了する。
【図面の簡単な説明】
【0029】
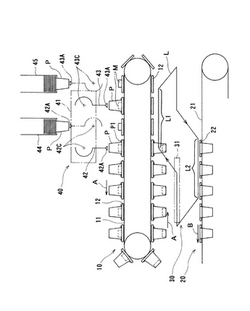
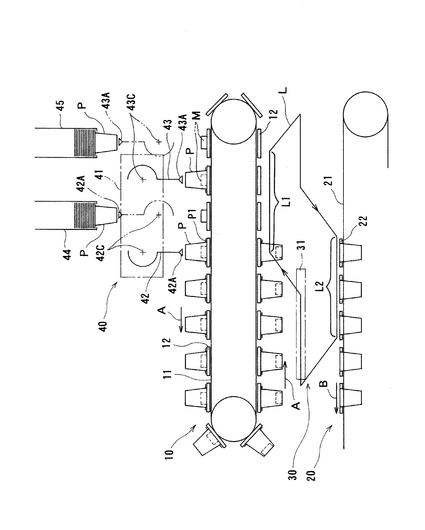
【図1】本発明の一実施形態装置の概要構成図である。
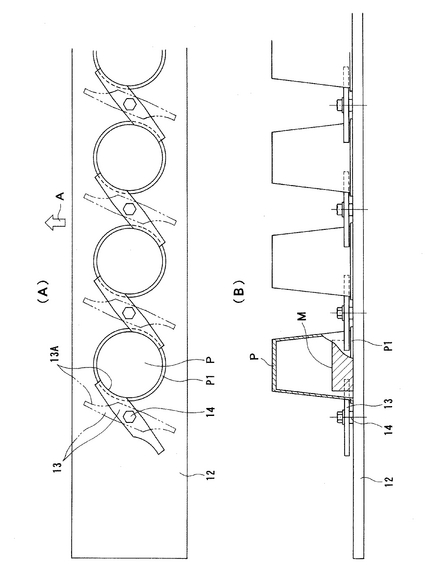
【図2】図1装置における第一コンベア装置の複数の支持プレートのうちの一つについて部分的に示し、(A)は平面図、(B)は容器と共に示す正面図である。
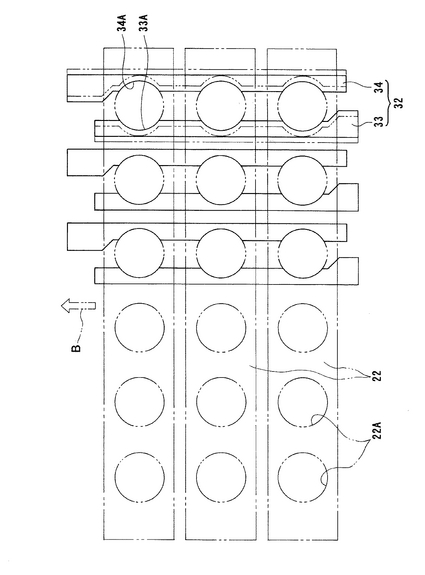
【図3】図1装置における中間受渡し装置の受部材の一部を第二コンベア装置との関係で示す平面図である。
【符号の説明】
【0030】
10 コンベア(コンベア装置)
12 搬送部(支持プレート)
40 容器供給部(容器供給装置)
41 移動基台
42,43 供給部材(供給腕)
42A,43A 取出部材(吸着部材)
44,45 マガジン
M 物品(内容物)
P 容器
【技術分野】
【0001】
本発明は、物品を包装工程にもたらすのに先立ち、該物品をコンベアの搬送部で搬送している際に、該搬送部上の物品に対し覆うように容器を配置する容器取り出し供給装置に関する。
【背景技術】
【0002】
このような装置としては、特許文献1に開示されている装置が知られている。
【0003】
この特許文献1の装置では、間欠走行するコンベア装置に設けられた複数のリテーナのそれぞれが順次停止する特定位置の上方に、多数の空の容器を取出し自在に保持するマガジンが配設されている。このマガジンは、空のカップ容器を多数積載した状態で容器の開口縁部で保持しており、該マガジンの底部に形成された孔部から容器を引き出せるようになっている。
【0004】
上記コンベア装置とマガジンとの間には、容器をマガジンから取出してコンベアの停止時にその搬送部上の物品に対して覆うようにこの搬送部上に配する容器供給装置が設けられている。
【0005】
上記容器供給装置では、吸着部材を有する部材が回動可能かつ上下動可能に支持されていて、吸着部材で容器をマガジンから取り出し、回動と共に下方へ移動して、容器を下向きの状態で、停止している搬送部上の物品を覆うように該容器を配置する。
【特許文献1】実公平6−50321
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した特許文献1の装置にあっては、容器供給装置はコンベアの搬送部が停止時にのみ容器を該搬送部上の物品に対して配置でき、間欠走行中は不可である。したがって、装置の処理能力は低い。仮りに、少しでもこの能力を上げようとして、走行速度あるいは走行立上り速度を大きくしようとすると、容器の転倒、位置のずれ、物品の損傷、コンベアの搬送部への容器の落下供給の失敗等、多くの不具合が生ずる。
【0007】
本発明は、このような不具合をもたらすことなく、コンベアを定速連続走行させつつ容器の配置を行えることとする容器取り出し供給装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る容器取り出し供給装置は、複数の物品を所定間隔をもって搬送する搬送部を有するコンベアと、該搬送部の上方位置に配設され複数の空容器を保持するマガジンと、該マガジンから容器を取り出し該容器の開口を下向きにして上記搬送部上の物品に対して覆うように配置する容器供給部とを備えている。
【0009】
かかる容器取り出し供給装置において、本発明では、コンベアの搬送部は定速連続走行し、容器供給部はコンベアの搬送方向とその逆方向で往復動可能な移動基台と、該移動基台に支持され、マガジンからの容器を取り出す取出部材が設けられた供給部材とを有し、上記移動基台は、マガジンからの容器の取出し時には停止し、容器を搬送部へ配置するときにはコンベアの搬送部と同速で同方向に移動し、供給部材はマガジンからの容器の取出し後、容器の開口を下向きに保持するように回動可能でかつ容器を搬送部上の物品に対して覆って配置するように移動基台に対して移動可能であると共に、容器の搬送部上の配置後は、上記移動基台と供給部材はマガジンからの容器の取出し位置へ戻るようになっていることを特徴としている。
【0010】
このような構成の本発明によると、容器供給部は、移動基台の停止にマガジンから空の容器を取り出し、該移動基台がコンベアの搬送部を同一方向かつ同速で移動しているときに上記容器を搬送部へ配置する。したがって、この容器の配置動作は、コンベアの搬送部が定速連続走行中に、搬送方向における容器供給部と搬送部との間での相対速度のない状態で行われる。
【0011】
本発明において、移動基台はコンベアの搬送方向での移動時に対し戻り方向での移動速度の方が速く設定されていることが好ましい。こうすることにより、容器の取り出し供給動作を次々と高サイクルで行え、装置の処理能力が向上する。
【0012】
本発明では、供給部材はコンベアの搬送方向で複数設けられ、この複数の供給部材が同時に作動するようになっているようにすることができる。こうすることにより、一回当りの動作で多くの容器の配置が行え、この点でも装置の処理能力が向上する。
【0013】
本発明では、供給部材は、例えば、回動自在に支持された供給腕であり、該供給腕の先端に吸着そしてその解除を可能とする吸着部材が取出部材として設けられているようにすることができる。
【発明の効果】
【0014】
本発明は、以上のように、容器供給部によりマガジンから空の容器を取り出し該容器をコンベアの搬送部上の物品に対して配置するときには、この容器供給部はコンベアの搬送方向と同方向で搬送速度と同一速度で移動しており、コンベアは一時的にも停止することなく定速連続走行させることができるので、停止時間がなく装置の高能率化が図れる。又、コンベアの搬送部は定速走行しているので、従来のように搬送部の走行の停止・開示時に物品や容器が不安定になったり位置がずれたりすることもなく、ひいては、物品の包装形態の品質保証が得られる。
【発明を実施するための最良の形態】
【0015】
以下、添付図面の図1ないし図3にもとづき、本発明の一実施形態装置を説明する。
【0016】
図1において、上方位置に第一コンベア装置10、下方位置に第二コンベア装置20、そして両コンベア間に中間受渡装置30が設けられている。又、上記第一コンベア装置10の上方位置には容器供給装置40が設けられていている。
【0017】
第一コンベア装置10は、コンベアチェーン11がA方向に定速で連続走行しており、該コンベアチェーン11には、走行方向で所定間隔をもって板状の複数の支持プレート12が取りつけられている。この支持プレート12がコンベアチェーン11に取りつけられて搬送部を形成している。各支持プレート12は、本実施形態ではコンベアチェーン11の幅方向(図1にて紙面に対し直角方向)に長くなっており、図2のごとく、複数(本実施形態では六つ)の容器Pをこれらの開口部を該支持プレート12に伏せた状態で支持できるようになっている。
【0018】
上記支持プレート12は、図2に見られるように、複数(本実施形態では七つ)の支持アーム13が上記支持プレート12の面上で軸14まわりに往復回動可能かつ図2にて時計まわり方向にばね等(図示せず)により付勢力を受けている。又、これらの七つの支持アーム13は、所定時にこの付勢力に抗した回動力を図示せぬ機構により一括して受けるようになっている。各支持アーム13は容器Pの側面と当接するに適した円弧部13Aが
形成されている。かくして、七つの支持アーム13は付勢力を受けて上記円弧部13Aで六つの容器Pの側面に接触し、容器Pが搬送部たるコンベアチェーン11の下側位置にきても、そのフランジP1で落下防止がなされる状態でこれらの六つの容器Pを支持する。
【0019】
第二コンベア装置20は、第一コンベア装置10と同様なコンベアチェーン21そして支持プレート22を有して搬送部を形成しているが、この第二コンベア装置20の搬送部は、上側を走行するとき、対向せる第一コンベアチェーン11の下側の搬送部とは逆方向Bに定速で連続走行している。支持プレート22は、容器PをそのフランジP1で支持するための支持孔22Aが、第一コンベア装置10の支持プレート12により支持される容器の数と同数だけ形成されている(図3をも参照)。各支持プレート22のこの支持孔22Aは、コンベアチェーン21の幅方向にて、上記第一コンベア装置10の支持プレート12により支持される複数の容器Pに対応した位置に形成されている。
【0020】
中間受渡し装置30は、図1にて上下左右に移動可能で、一つのループを描くように移動駆動を受ける移動基台31に受部材32(図3参照)が取りつけられて構成されている。この受部材32は、図3に見られるように、対をなす部材33,34から成っており、一つの支持プレート12、したがって支持プレート22によって支持される容器の数と同数、すなわち、本実施形態では六対設けられている(図3では三対のみが示されており、他の三対の図示は省略されている。)。各部材33,34は上記第二コンベア装置20の支持プレート22の長手方向と直角な方向、すなわち、コンベアチェーン21の走行方向Bに延びている。上記対をなす部材33,34には、それらの対向縁に、隣接する二つの支持プレート22の支持孔22A同士間の間隔と同じ間隔で、三つの支持プレート12、したがって支持プレート22にわたるように、円弧状の三つ支持縁33A,34Aがそれぞれ形成されている。対をなす受部材33,34は、図3の実線と二点鎖線で示されるように、所定時に接離駆動されるようになっており、接近時に縁部33A,34Aが容器Pの側面に接してフランジP1にて該容器Pを支持し、離反時に容器Pが自由に落下できる。
【0021】
上記中間受渡し装置30の移動基台31は、図1に見られるように、第一コンベア装置10に近づいてコンベアチェーン11の下側に近づいてこれと同速で並走した後に、下方に移動して第二コンベア装置に近づいてコンベアチェーン21の上側に近づいてこれと同速で並走するようにループ軌道Lを描いたサイクル移動を行う。この中間受渡し装置30の三対の受部材33、34は、少なくとも第二コンベア装置20と並走する移動範囲L2で離反した開状態にあり、少なくとも第一コンベア10と並走する範囲L1及び該範囲L1から上記移動範囲L2に到までの範囲は互いに接近した閉状態にある。
【0022】
上記第一コンベア装置10の上方に設けられた容器供給装置40は、図1にて左右に往復動する移動基台41に、供給部材として、上下動かつ回動可能な二つの供給腕42,43が設けられている。供給腕42,43には取出部材としての吸着部材42A,43Aがそれぞれ設けられている。上記移動基台41は、左方へは所定時間の間第一コンベア装置10の上側のチェーンコンベア11と同速で走行し、その後、右方へ早戻りする。この移動基台41が左方に移動している間に、上記供給腕42,43は下方へ移動すると共に吸着部材42A,43Aが下向きとなるように中心42C,43Cまわりに回動し、かつ吸着部材42A,43Aの吸着力は解除される。又、移動基台41が右方へ移動している間は、吸着部材42A,43Aは、上向きに位置して、マガジン44,45にストックされている空の容器Pを吸着して取り出す。なお、このマガジン44,45は固定位置に配設されており、移動基台41が右方の原位置に戻って少しの間停止する間に、上記吸着部材42A,43Aが容器を取り出す。この容器の取出し後、移動基台41は左方へ移動開始する。
【0023】
このような構成に成る本実施形態装置において、容器は第一コンベア装置10から第二コンベア装置20へ、次の要領で受け渡される。
【0024】
(1)第一コンベア装置10の各支持プレート12上には、複数の容器Pの載置予定位置へ物品、この場合、容器Pへ収容されるべき内容物M(図示の例では固形物)が図示せぬ装置により次々と供給される。
【0025】
(2)容器供給装置40は、上記二つの供給腕42,43が作動してマガジン44,45から空容器Pをそれぞれ取り出し、第一コンベア装置10と並走している間に、該第一コンベア装置10の支持プレート12上の内容物Mを覆うようにして、該容器Pを伏せた状態で該支持プレート12上に置く。この容器Pは、図1に見られるように、二つの支持プレート12が通過する間に二つの容器Pが一つおきの支持プレート12上に同時に配されて行く。したがって、容器供給装置40の位置を通過したときには、通過したすべての支持プレート12上に容器Pが載置されている。この容器Pの支持プレート12への載置時には、図2に見られる支持アーム13は回動力を受けていて図2の二点鎖線の位置にあって載置を可としている。そして、容器Pの載置直後には上記回動力が解除されて、付勢力によって、図2における実線位置で、容器を支持する。
【0026】
(3)支持プレート12上で支持アーム13によって支持された容器Pは、コンベアチェーン11の走行が進むとコンベア装置10の下側を移動する。これと共に、中間受渡し装置30が範囲L1においてこのコンベアチェーン11と並走する。このとき、中間受渡し装置30の六対の受部材33,34は、第一コンベア装置10の容器Pの直下にあって同速で移動しており、その間に上記第一コンベア装置10の三つの支持プレート12の支持アーム13が回動力を受けて計18個の容器Pを支持力から解放する。したがって、底部に内容物Mを収めている容器Pは、中間受渡し装置30の六対の受部材33,34へ上記18個の容器Pを落下供給する。該容器PはそれらのフランジP1にて閉位置の受部材33,34の支持縁33A,34によって吊下されるようにして支持される。
【0027】
(4)次に、中間受渡し装置30は、ループLを進み範囲L2にて、第二コンベア装置20の支持プレート22と同速で並走する。この間に、中間受渡し装置30の上記対をなす受部材33,34は開状態となって、18個すべての容器Pを落下せしめて第二コンベア装置20の支持プレート22の支持孔22A内へ供給する。容器Pはそのフランジがこの支持孔22Aの縁部で支持される。かくして、容器Pは第二コンベア装置20によって次工程へもたらされる。
【0028】
(5)本実施形態では、中間受渡し装置30は六対の受部材が同時に18個の容器の受授を行うようになっているので、第一コンベア装置10の次の三つの支持プレート12が次の18個の容器を上記範囲L1にもたらすまでに、該範囲L1で並走するように移動し、上記18個すべての容器Pについて受授を完了する。
【図面の簡単な説明】
【0029】
【図1】本発明の一実施形態装置の概要構成図である。
【図2】図1装置における第一コンベア装置の複数の支持プレートのうちの一つについて部分的に示し、(A)は平面図、(B)は容器と共に示す正面図である。
【図3】図1装置における中間受渡し装置の受部材の一部を第二コンベア装置との関係で示す平面図である。
【符号の説明】
【0030】
10 コンベア(コンベア装置)
12 搬送部(支持プレート)
40 容器供給部(容器供給装置)
41 移動基台
42,43 供給部材(供給腕)
42A,43A 取出部材(吸着部材)
44,45 マガジン
M 物品(内容物)
P 容器
【特許請求の範囲】
【請求項1】
複数の物品を所定間隔をもって搬送する搬送部を有するコンベアと、該搬送部の上方位置に配設され複数の空容器を保持するマガジンと、該マガジンから容器を取り出し該容器の開口を下向きにして上記搬送部上の物品に対して覆うように配置する容器供給部とを備える容器取り出し供給装置において、コンベアの搬送部は定速連続走行し、容器供給部はコンベアの搬送方向とその逆方向で往復動可能な移動基台と、該移動基台に支持され、マガジンからの容器を取り出す取出部材が設けられた供給部材とを有し、上記移動基台は、マガジンからの容器の取出し時には停止し、容器を搬送部へ配置するときにはコンベアの搬送部と同速で同方向に移動し、供給部材はマガジンからの容器の取出し後、容器の開口を下向きに保持するように回動可能でかつ容器を搬送部上の物品に対して覆って配置するように移動基台に対して移動可能であると共に、容器の搬送部上の配置後は、上記移動基台と供給部材はマガジンからの容器の取出し位置へ戻るようになっていることを特徴とする容器取り出し供給装置。
【請求項2】
移動基台はコンベアの搬送方向での移動時に対し戻り方向での移動速度の方が速く設定されていることとする請求項1に記載の容器取り出し供給装置。
【請求項3】
供給部材はコンベアの搬送方向で複数設けられ、この複数の供給部材が同時に作動するようになっていることとする請求項1に記載の容器取り出し供給装置。
【請求項4】
供給部材は回動自在に支持された供給腕であり、該供給腕の先端に吸着そしてその解除を可能とする吸着部材が取出部材として設けられていることとする請求項1又は請求項2に記載の容器取り出し供給装置。
【請求項1】
複数の物品を所定間隔をもって搬送する搬送部を有するコンベアと、該搬送部の上方位置に配設され複数の空容器を保持するマガジンと、該マガジンから容器を取り出し該容器の開口を下向きにして上記搬送部上の物品に対して覆うように配置する容器供給部とを備える容器取り出し供給装置において、コンベアの搬送部は定速連続走行し、容器供給部はコンベアの搬送方向とその逆方向で往復動可能な移動基台と、該移動基台に支持され、マガジンからの容器を取り出す取出部材が設けられた供給部材とを有し、上記移動基台は、マガジンからの容器の取出し時には停止し、容器を搬送部へ配置するときにはコンベアの搬送部と同速で同方向に移動し、供給部材はマガジンからの容器の取出し後、容器の開口を下向きに保持するように回動可能でかつ容器を搬送部上の物品に対して覆って配置するように移動基台に対して移動可能であると共に、容器の搬送部上の配置後は、上記移動基台と供給部材はマガジンからの容器の取出し位置へ戻るようになっていることを特徴とする容器取り出し供給装置。
【請求項2】
移動基台はコンベアの搬送方向での移動時に対し戻り方向での移動速度の方が速く設定されていることとする請求項1に記載の容器取り出し供給装置。
【請求項3】
供給部材はコンベアの搬送方向で複数設けられ、この複数の供給部材が同時に作動するようになっていることとする請求項1に記載の容器取り出し供給装置。
【請求項4】
供給部材は回動自在に支持された供給腕であり、該供給腕の先端に吸着そしてその解除を可能とする吸着部材が取出部材として設けられていることとする請求項1又は請求項2に記載の容器取り出し供給装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−131255(P2006−131255A)
【公開日】平成18年5月25日(2006.5.25)
【国際特許分類】
【出願番号】特願2004−321760(P2004−321760)
【出願日】平成16年11月5日(2004.11.5)
【出願人】(000226976)日清食品株式会社 (127)
【出願人】(393027121)株式会社ファブリカトヤマ (27)
【Fターム(参考)】
【公開日】平成18年5月25日(2006.5.25)
【国際特許分類】
【出願日】平成16年11月5日(2004.11.5)
【出願人】(000226976)日清食品株式会社 (127)
【出願人】(393027121)株式会社ファブリカトヤマ (27)
【Fターム(参考)】
[ Back to top ]