
容器搬送装置
【課題】加圧空気を噴出して容器を搬送する際の容器の姿勢を正立状態に保つ。
【解決手段】首部に鍔部Phを有する容器Pの鍔部下面に当接する一対のネックレール5と、この一対のネックレール5で支持されている容器Pに加圧空気を噴出する加圧空気噴出手段とを備えている。加圧空気噴出手段は、容器搬送方向Yへの力F2を与える加圧空気を鍔部Phの下側に噴出する噴出口N2と、容器搬送方向Yとは逆向きの力を与える加圧空気を鍔部Phの上側の容器口部Pcに噴出する噴出口N1と、を有する。
【解決手段】首部に鍔部Phを有する容器Pの鍔部下面に当接する一対のネックレール5と、この一対のネックレール5で支持されている容器Pに加圧空気を噴出する加圧空気噴出手段とを備えている。加圧空気噴出手段は、容器搬送方向Yへの力F2を与える加圧空気を鍔部Phの下側に噴出する噴出口N2と、容器搬送方向Yとは逆向きの力を与える加圧空気を鍔部Phの上側の容器口部Pcに噴出する噴出口N1と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、PETボトル等の首部に鍔部を有する軽量容器の容器搬送装置に関する。
【背景技術】
【0002】
従来、PETボトル等の首部に鍔部を有する軽量容器の容器搬送装置は、前記鍔部の下面側を対向した一対のレールから成るネックレールにより支持し、この容器にエアを吹き付けてネックレール上を滑らせて容器を搬送するようにしている加圧空気を利用したコンベヤ(エアコンベヤ)が主に使用されており、このようなエアコンベヤから成る容器搬送装置においては、前記鍔部の下面が前記エア搬送による滑りで傷がつくことを防止する技術、または、前記容器搬送時に容器の姿勢バランスが崩れて容器が後傾し、搬送中の容器が前記ネックレールに噛み込んで容器が滞留した場合に、容器滞留を検出して解消させるという技術が公開されている。(特許文献1および2)
【0003】
近年、容器搬送時に容器の姿勢が崩れないように、容器の姿勢を正立状態のまま搬送する技術開発の要求が高まっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−137825号公報(図1)
【特許文献2】特許第4379210号公報(図1)
【発明の概要】
【発明が解決しようとする課題】
【0005】
前記特許文献1によれば、首部に鍔部を備えた容器に空気流を作用させ、容器の移送軌跡に沿った案内レールの上面に鍔部を摺動させながら容器を搬送する軽量容器の空気搬送コンベヤ装置において、前記案内レールの直下に空気噴射口を設けて、空気噴射口から噴射される加圧空気により容器が進行方向の推力を受け、かつ、鍔部が浮上方向への推力を受けるようにして、容器を搬送するとしている。
【0006】
しかしながら、前記特許文献1の技術では、加圧空気噴射箇所が案内レール直下の1箇所のみであり、容器搬送時に容器胴部に作用する空気抵抗力により容器胴部が搬送方向と逆方向に傾くことへの対応がなされていない恐れがある。
また、噴射された加圧空気流を、容器の搬送方向に、かつ、斜め上方に向かって空気案内通路(容器口部搬送通路)に侵入させて容器口部を推進するとしているので、この容器口部の推進によっても、鍔部を支点として容器胴部が搬送方向と逆方向に傾いてしまうため、容器の鍔部が案内レールに噛み込むことが多く、噛み込んだ容器の後続の容器がブロックされて所謂ジャム状態になることが多いという恐れがある。また、例えば容器胴部の断面形状が砲弾状等円筒状ではない場合には、推進力により前傾する力が発生しやすく、特に、容器の搬送が停止した場合には、容器口部にかかる推進力で容器が前傾方向に傾いて安定してしまう状態となりやすいため、容器姿勢を正立状態に保つという対応ができないという恐れがある。
【0007】
また、前記特許文献2によれば、容器の首部に形成されたフランジ(鍔部)の下面を支持する対向した一対のレールから成るネックレールに支持されている容器をエアの搬送力で搬送する容器搬送装置において、フランジの上方に加圧エアで容器口部全体に推力を与えるエアダクト(トップブロアからエア吹き込み)と、フランジの下方に加圧エアで容器胴部に推力を与えるサイドブロアを設けて容器を搬送するとしている。
【0008】
しかしながら、前記特許文献2の技術では、加圧エア吹付け箇所を容器フランジ上方と下方の2箇所としているが、容器フランジ上方に吹付けられた加圧エアによる容器口部の推力が、フランジ下面を支点として容器姿勢を搬送方向と逆方向に傾けるように作用してしまうという恐れがある。
また、容器搬送時に空気流を受ける面積が大きい容器胴部に作用する空気抵抗力が大きく、フランジ下面を支点としてこの空気抵抗力による容器姿勢の搬送方向と逆方向に傾こうとする作用が大きい。前記フランジ下方での容器胴部へのサイドブロアによるエア吹付けは、上記フランジ上方での容器口部への加圧エア吹付けによる容器姿勢の搬送方向と逆方向への傾きを矯正する働きと、前記空気抵抗力による容器姿勢の搬送方向と逆方向への傾きを矯正しようとする働きをするが、サイドブロアによるエア吹付けの対象となる容器胴部の形状には多種多様な形状があり、エア吹付け力が一定せず、容器形状に適合させた位置にエア吹付け部材を配設することが実際上は不可能であり、容器搬送時の容器姿勢が正立状態を保持することが不可能となる恐れがある。
このために容器が搬送される際、容器首部のフランジがネックレールに噛み込むことが多く、噛み込んだ容器の後続の容器がブロックされて、所謂ジャム状態になることが多いという恐れがある。
【0009】
本発明は、首部に鍔部を有する容器の鍔部下面に当接する対向した一対のレールから成る支持装置(ネックレール)で容器を支持した状態で、圧力流体(例えば加圧空気)を噴出させる加圧空気噴出手段により容器を搬送する容器搬送装置において、多種多様な容器胴部形状に対しても特別なサイドブロー装置やその位置調整を必要とせずに、容器を正立状態に保ったまま搬送して、搬送容器の鍔部がネックレールに噛み込まない容器搬送装置を提供し、さらに、容器特性(容器重量、容器鍔部より下の容器高さ、容器の幅、容器の直径、容器鍔部とネックレールとの摩擦係数等)および容器搬送能力が変わった場合でも、独立して容器を正立状態に保つように自動的に制御できる容器搬送装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
前記の課題に対し、本発明は以下の手段により解決を図る。
(1)第1の手段の容器搬送装置は、首部(ネック)に鍔部を有する容器(通称PETボトルと言われる軽量容器)の鍔部下面に当接する対向した一対のレールから成る支持装置(以下ネックレールと称する)に容器を支持した状態で、圧力流体(例えば加圧空気。以下加圧空気と称する)を噴出させる加圧空気噴出手段により容器を搬送する容器搬送装置において、前記加圧空気噴出手段を、前記ネックレールに対して前記鍔部の下側(ネックレール下部)には容器搬送方向への力を与えるための加圧空気を噴出する推進装置と、前記鍔部より上部の容器口部には容器搬送方向とは逆向きの力を与えるための加圧空気を噴出する姿勢制御装置とから構成したことを特徴とする。
【0011】
(2)第2の手段の容器搬送装置は、前記第1の手段の容器搬送装置において、前記姿勢制御装置は、容器が前記ネックレールで支持されて搬送されることにより、容器の搬送速度に比例して発生する空気の抵抗力によって、前記鍔部より下方部(容器胴部)が容器搬送方向とは逆方向へ傾斜することを防止するために必要な加圧空気を噴出するように、風量調整装置を備えたことを特徴とする。
【0012】
(3)第3の手段の容器搬送装置は、前記第2の手段の容器搬送装置において、前記風量調整装置は、必要な風量設定値が制御装置からの指令で自動的に設定されるようにしたことを特徴とする。
【0013】
(4)第4の手段の容器搬送装置は、前記第1から第3の手段の容器搬送装置において、前記推進装置で発生させる前記加圧空気の圧力と前記姿勢制御装置に発生させる前記加圧空気の圧力が、予め設定された容器特性(容器重量、容器鍔部より下の容器高さ、容器の幅、容器の直径、容器鍔部と前記ネックレールとの摩擦係数等)と搬送能力で決まる既知の基準データにより、前記制御装置で自動的に設定されることを特徴とする。
【0014】
(5)第5の手段の容器搬送装置は、前記第1から第4の手段の容器搬送装置において、前記推進装置と前記姿勢制御装置が、前記加圧空気の噴出圧力を容器搬送通路全体に亘って供給するための圧力供給源となる共通の圧力チャンバーから形成されていることを特徴とする。
【0015】
(6)第6の手段の容器搬送装置は、前記第1から第5の手段の容器搬送装置において、搬送される容器口部の外径方向および高さ方向の寸法が容器の胴部サイズに関わらず同一であることを利用し、前記姿勢制御装置を形成している容器口部搬送通路の断面の大きさは、容器の口部外径方向および高さ方向が容器搬送中に発生する容器の揺れによって該容器口部搬送通路を形成する部材に干渉しないために必要な隙間を有する極小の大きさとし、容器口部に作用する加圧空気の噴出速度の安定領域を利用できるように構成したことを特徴とする。
【0016】
(7)第7の手段の容器搬送装置は、前記第1から第6の手段の容器搬送装置において、前記姿勢制御装置を前記容器口部搬送通路の側面部と天面部の何れか一方、または、両方に設けたことを特徴とする。
【発明の効果】
【0017】
請求項1に係わる発明は、首部に鍔部を有する容器の鍔部下面に当接する対向した一対のレールから成るネックレールに容器を支持した状態で、加圧空気を噴出させる加圧空気噴出手段により容器を搬送する容器搬送装置において、前記加圧空気噴出手段を、前記ネックレール部に対して前記鍔部の下側(ネックレール下部)には容器搬送方向への力を与えるための加圧空気を噴出する推進装置と、前記鍔部より上部の容器口部には容器搬送方向とは逆向きの力を与えるための加圧空気を噴出する姿勢制御装置とから構成されるようにしたことにより、容器搬送に必要な推進力は前記推進装置によって与え、空気抵抗力によって容器の胴部が容器搬送方向とは逆方向へ傾斜しようとする力に対しては、前記姿勢制御装置によって容器を正立にする方向の力を与え、常に容器を正立状態に保つ働きをさせることで、容器を正立状態に保ったまま搬送できる。この正立させる力のバランス効果により容器の鍔部がネックレールに噛み込むことを防止することが可能となり、容器を安定して正立状態で搬送できるという効果を有する。
また、前記姿勢制御装置において、容器胴部が多種多様な形状でも、形状寸法が同一の容器口部に加圧空気を噴出するようにしたことにより、噴出する加圧空気の安定速度領域を利用できるため、容器を正立状態に保つために必要な力を安定的に保つことができるという効果を有する。
【0018】
請求項2に係わる発明は、前記請求項1に記載する容器搬送装置において、前記姿勢制御装置が風量調整装置を備えたことにより、容器の搬送に伴って容器胴部に発生する空気抵抗力により容器の胴部が容器搬送方向とは逆方向へ傾斜することを防止するために必要な圧力を加圧空気に与えることができるという効果を有する。
【0019】
請求項3に係わる発明は、前記請求項2に記載する容器搬送装置において、前記風量調整装置が、必要な風量設定値を制御装置からの指令で自動的に設定されるようにしたことにより、前記姿勢制御に必要な加圧空気の圧力が前記風量調整装置によって自動的に調整されるという効果を有する。
【0020】
請求項4に係わる発明は、前記請求項1から3に記載する容器搬送装置において、前記推進装置で発生させる前記加圧空気の圧力と前記姿勢制御装置に発生させる前記加圧空気の圧力が、予め設定された容器特性(容器重量、容器鍔部より下の容器高さ、容器の幅、容器の直径、容器鍔部とネックレールとの摩擦係数等)と搬送能力で決まる既知の基準データにより、前記制御装置で自動的に設定されるようにしてあるため、容器の形状、大きさ等の容器特性と容器の搬送能力に応じて自動的に姿勢制御できるという効果を有する。
【0021】
請求項5に係わる発明は、前記請求項1から4に記載する容器搬送装置において、前記推進装置と前記姿勢制御装置が、前記加圧空気の噴出圧力を容器搬送通路全体に亘って供給するための圧力供給源となる共通の圧力チャンバーから形成されていることにより、前記姿勢制御を前記容器の搬送能力と関連させて適切に制御できるという効果を有する。
さらに圧力供給源の構造を簡素にできるとともに、容器胴部にサイドブロア等での吹付け装置や調整手段を不要にできるという効果を有する。
【0022】
請求項6に係わる発明は、前記請求項1から5に記載する容器搬送装置において、搬送される容器口部の外径方向および高さ方向の寸法が容器の胴部サイズに関わらず同一であることを利用し、前記姿勢制御装置を形成している容器口部搬送通路の断面の大きさが、容器の口部外径方向および高さ方向が容器搬送中に発生する容器の揺れによって該容器口部搬送通路を形成する部材に干渉しないために必要な隙間を有する極小の大きさとし、容器口部に作用する加圧空気の噴出速度の安定領域を利用できるように構成したことにより、噴出する加圧空気が容器口部に作用する力を安定的にすることができるという効果を有する。
【0023】
請求項7に係わる発明は、前記請求項1から6に記載する容器搬送装置において、前記姿勢制御装置を前記容器口部搬送通路の側面部と天面部の何れか一方、または、両方に設けるようにしたことにより、前記姿勢制御を行うに当って、容器特性および容器搬送能力に応じて適切な姿勢制御装置の設置箇所を選択でき、前記姿勢制御を効果的に行うことができるという効果を有する。
【図面の簡単な説明】
【0024】
【図1】本発明の実施の形態に係わる容器搬送装置の側面断面図である。
【図2】図1のV2−V2断面図であり、一部図示を省略してある。
【図3】図1の正面図で、一部断面図としてあり、また、一部図示を省略してある。
【発明を実施するための形態】
【0025】
以下、この発明の実施の形態につき図面を参照しつつ詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。また、下記実施の形態における構成要素には、当業者が容易に想定できるもの、あるいは実質的に同一のものが含まれる。
(発明の実施の形態)
【0026】
本発明の実施の形態を図1から図3に基づいて説明する。
図1は、本発明の実施の形態に係わる容器搬送装置の側面断面図である。
図2は、図1のV2−V2断面図であり、一部図示を省略してある。
図3は、図1の正面図で、一部断面図としてあり、また、一部図示を省略してある。
【0027】
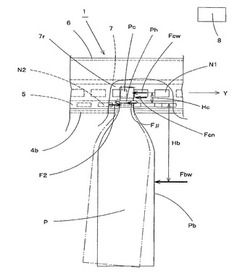
図1において、容器搬送装置1は、首部(ネック)に鍔部を有する容器Pの鍔部Phの下面に当接する対向した一対のネックレール(支持装置)5と、前記鍔部Phの下側にY方向(容器搬送方向)への力を与えるための圧力流体(例えば加圧空気。以下加圧空気と称する)を噴出する推進装置N2(噴出口N2。以下噴出口N2とも称する)と、前記鍔部Phより上部の容器口部PcにY方向とは逆向きの力を与えるための圧力流体(加圧空気)を噴出する姿勢制御装置N1(噴出口N1。以下噴出口N1とも称する)と、外壁6と搬送通路体7から成る前記加圧空気の圧力供給源となる共通の圧力チャンバー6rと、後述する制御装置8と、後述する風量調整装置10から主に構成されており、前記圧力チャンバー6rから噴出する加圧空気によって、容器PをY方向に搬送するようになっている。
本構成において、加圧空気噴出手段は推進装置N2と姿勢制御装置N1により構成されており、加圧空気の噴出方向はそれぞれY方向およびY方向とは逆向きとなっている。
【0028】
また、容器Pの鍔部Phより下方の胴部Pbは、Y方向に沿って設けられた覆い4a、覆い4bおよび覆い4cによって覆われており、該覆い4a、覆い4bおよび覆い4cは、本搬送装置のメインフレームの一部であるとともに、搬送容器Pを外部環境から保護するためのカバーの役目を果たすものであり、さらに、覆い4aおよび覆い4bには、搬送容器Pの胴部Pbが搬送中に側方へ揺れ振動するのを規制するガイド部材4dが設けられてており、該ガイド部材4dはシリンダ8によって容器Pの胴部Pb方向へ突き出し又は引き込みが自在に行われるようになっているが、前記覆い4a、覆い4bおよび覆い4cと前記ガイド部材4dは、何れも本発明の技術思想を規制する用件ではない。
【0029】
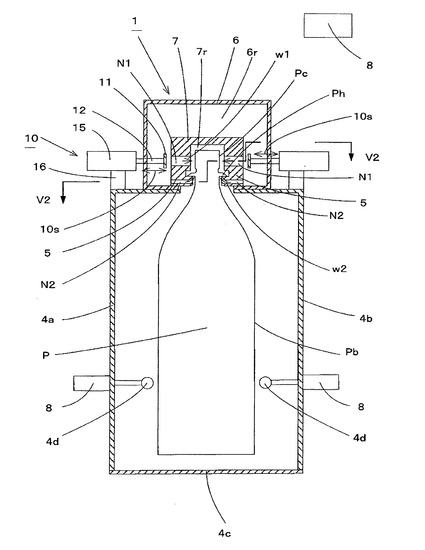
前記噴出口N1および噴出口N2は、容器Pの口部Pcの搬送通路7rおよび一対のネックレール5に対してそれぞれ対称位置に所定のピッチ間隔で設けられているが、図2は、中心線Y1より右半分が前記噴出口N1の配置を示し、中心線Y1より左半分が前記噴出口N2の配置を示している。
【0030】
前記噴出口N2は、図2に示すように、矢印w2の向きで、容器Pの鍔部Phの下面の容器Pの首部へ圧力チャンバー6rから加圧空気が噴出されるようになっていて、容器PにY方向へ搬送する推進力を与えている。また、前記噴出口N1は矢印w1の向きで、容器Pの口部Pcに向けて圧力チャンバー6rから加圧空気が噴出されるようになっていて、後述するように容器Pの姿勢制御をするようになっている。
【0031】
前記噴出口N1には、図1および図2に示すように、風量調整装置10が設けられており、該風量調整装置10の風量調整機構は、圧力チャンバー6rに設けられている風量調整具11が、外壁6を気密に貫通して摺動するロッド12を介して、前記覆い4aおよび覆い4bに取付け具16を介して取付けられた駆動装置15の作動により、噴出口N1からの位置を矢印10sのように変更させ、加圧空気が通過する開度を調整することによって、前記圧力チャンバー6rから矢印w1の方向に噴出される加圧空気の風量を調整できる構成となっている。
なお、前記駆動装置15は、サーボシリンダ或いはサーボモータ等としてもよく、何れの場合も制御装置8からの指令により風量調節具11の設定位置が自動的に変更されるように作動する。
【0032】
前記制御装置8には、予め設定された容器特性(容器Pの重量、容器鍔部Phより下の容器Pの高さ、容器Pの幅、容器Pの直径、容器Pとネックレール5との摩擦係数等)と、容器Pの搬送能力で決められる既知の基準データが設定されており、該制御装置8からの指令により前記駆動装置15を作動させて、前記風量調整具11の矢印10s方向の位置が自動的に設定されることにより、前記噴射口N1から容器Pの口部Pcに噴出する前記加圧空気の風量(即ち、容器Pの口部Pcにかかる力)が自動的に設定されるようになっている。
【0033】
なお、前記噴出口N1が設けられている前記口部Pcの搬送通路7rの断面の大きさは、搬送中に容器Pに揺れが発生しても、前記口部Pcの外径方向および高さ方向が容器口部の搬送通路7rを形成している搬送通路体7に干渉しないために必要な隙間を有する極小の大きさとしてあり、前記口部Pcに与える噴出口N1からの加圧空気の力を安定的に維持することができる。
【0034】
上記説明では、前記噴出口N1を口部Pcの搬送通路7rの側面部(搬送通路体7の側面部)に設けた場合を示したが、噴出口N1は口部Pcの搬送通路7rの天面部(搬送通路体7の天面部)に設けてもよく、また、前記口部Pcの搬送通路7rの側面部と天面部の両方に設けてもよい。
【0035】
また、ここでは、前記噴出口N2から噴出される加圧空気の圧力は、図示しない圧力供給装置から供給される前記圧力チャンバー6r内の加圧空気の圧力に比例的に設定されるようにしてあるが、前記噴出口N2にも、前記風量調整装置10と同様の風量調整装置を設けて、前記圧力チャンバー6rから矢印w2の方向に噴出される加圧空気の風量(即ち、推進装置N2の推進力)を調整するようにしてもよく、前記圧力チャンバー6rに付加する圧力も前記噴出口N2から噴出される加圧空気の圧力も、前記制御装置8によって自動的に設定されるようになっている。
【0036】
次に、本発明の実施の形態に係わる容器搬送装置1の作用を説明する。
例えば加圧空気のようなガス流体が噴出口から噴出される場合、該噴出流体は、噴出口から吹付け対象とする箇所までの距離に反比例して速度が減衰することが知られている。即ち、噴出圧力が一定でも容器Pの口部Pcに働く力は、噴出口の面積と噴出口からの距離によって変動することになる。
従って、本発明では、前記噴出口N1および噴出口N2から噴出される加圧空気を安定した力として働かせるために、搬送通路7rの構造を搬送上必要な極小空間となる大きさに構成している。
【0037】
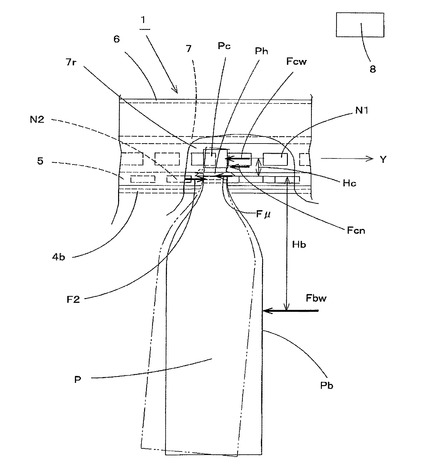
前記一対のネックレール5により鍔部Phの下面を支持されて、前記加圧空気噴出手段から噴出された加圧空気によって姿勢制御されながら搬送される容器Pに作用する力について、図3をもとに説明する。
容器Pが搬送される際に容器Pの胴部Pbが受ける空気抵抗力Fbwと容器Pの口部Pcに発生する空気抵抗力Fcn、前記口部Pcへ前記噴出口N1から噴出される加圧空気によって受ける姿勢制御力Fcwと、容器Pが搬送される際に前記鍔部Phと前記ネックレール5との間に作用する摩擦力Fμ、静止している容器Pを必要な速度まで加速させるに必要な加速力Fαからなる全負荷力(抵抗力)に対し、容器Pを搬送するために必要な推進力F2が前記噴出口N2からの加圧空気の噴出力で与えられる。
【0038】
次に、搬送中の容器Pの姿勢と力の関係は、前記ネックレール5の搬送面から前記容器胴部Pbの重心までの距離をHb、ネックレール5の上面から容器口部Pcの中心までの距離をHcとすると、ネックレール5で支持されている位置を基準とするモーメントのバランスが成り立つ必要がある。
容器Pをネックレール5で支持して搬送する力の関係は、
容器Pを時計廻りへ回転させるモーメント:Fbw×Hb
容器Pを反時計廻りへ回転させるモーメント:(Fcw+Fcn)×Hc
容器Pを搬送するために必要な力:F2=Fbw+Fμ+Fα+Fcw+Fcn
ここに、
Fbw×Hb=(Fcw+Fcn)×Hc より、
Fcw=(Fbw×Hb−Fcn×Hc)/Hc となり、
姿勢制御装置N1の姿勢安定に必要な力が決められる。
【0039】
前記容器胴部Pbが受ける空気抵抗力Fbwは、基本的には容器Pの搬送速度によって容器胴部Pbの投影面積が受ける空気の抵抗力であり、容器胴部Pbの投影面積が大きい大形容器や、搬送速度が高速になる程この空気抵抗力が強くなる。また、このような条件になる程搬送に必要な推進力F2も強くなり、このために後述する噴出口N1からの加圧空気の噴出が無い場合には、搬送される容器Pは正立状態から、図3の二点鎖線で示すように、容器胴部PbがY方向とは逆向き(時計廻り)に傾く傾向が発生しやすくなる。その結果、前記鍔部Phの進行方向端部が前記一対のネックレール5の搬送面に食い込む等の状態を誘発させ、容器Pを所定速度で搬送することが出来ない状態や、最悪の場合には、所謂ジャム状態(容器Pが傾斜したままで連なって停止)となってしまう。
【0040】
前記空気抵抗力Fbw、前記空気抵抗力Fcn、前記姿勢制御力Fcwおよび前記摩擦力Fμ、前記推進力F2は、容器Pの容器特性(容器Pの重量、容器鍔部Phより下の容器Pの高さ、容器Pの幅、容器Pの直径、容器Pとネックレール5との摩擦係数等)、および、容器Pの搬送能力(搬送速度)によって決定されるが、該容器特性と搬送能力を予め既知の基準データとして制御装置8に設定入力してあり、制御装置8により、前記圧力供給源となる圧力チャンバー6rへの設定圧力も、前記風量調整装置10の駆動装置15による作動量も自動的に設定されるため、推進力と姿勢制御に必要な力を自動的に設定できる。
【0041】
以上説明したように、前記制御装置8は、推進力と姿勢制御力を自動的に制御することによって、前記容器Pは正立状態を保持しながら安定した姿勢でY方向へ搬送されることができる。
【符号の説明】
【0042】
1 容器搬送装置
5 (一対の)ネックレール(支持装置)
6 外壁
6r 圧力チャンバー
7 搬送通路体
7r 容器口部搬送通路
10 風量調整装置
11 風量調整具
15 (風量調整装置の)駆動装置
F2 容器推進力
Fα 容器加速力
Fbw 容器胴部が受ける空気抵抗力
Fcn 容器口部が受ける空気抵抗力
Fcw 容器口部の姿勢制御力
Fμ 容器とネックレールとの摩擦抵抗力
N1 噴出口(姿勢制御装置)
N2 噴出口(推進装置)
P 容器
Pb (容器Pの)胴部
Pc (容器Pの)口部
Ph (容器Pの)鍔部
【技術分野】
【0001】
本発明は、PETボトル等の首部に鍔部を有する軽量容器の容器搬送装置に関する。
【背景技術】
【0002】
従来、PETボトル等の首部に鍔部を有する軽量容器の容器搬送装置は、前記鍔部の下面側を対向した一対のレールから成るネックレールにより支持し、この容器にエアを吹き付けてネックレール上を滑らせて容器を搬送するようにしている加圧空気を利用したコンベヤ(エアコンベヤ)が主に使用されており、このようなエアコンベヤから成る容器搬送装置においては、前記鍔部の下面が前記エア搬送による滑りで傷がつくことを防止する技術、または、前記容器搬送時に容器の姿勢バランスが崩れて容器が後傾し、搬送中の容器が前記ネックレールに噛み込んで容器が滞留した場合に、容器滞留を検出して解消させるという技術が公開されている。(特許文献1および2)
【0003】
近年、容器搬送時に容器の姿勢が崩れないように、容器の姿勢を正立状態のまま搬送する技術開発の要求が高まっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−137825号公報(図1)
【特許文献2】特許第4379210号公報(図1)
【発明の概要】
【発明が解決しようとする課題】
【0005】
前記特許文献1によれば、首部に鍔部を備えた容器に空気流を作用させ、容器の移送軌跡に沿った案内レールの上面に鍔部を摺動させながら容器を搬送する軽量容器の空気搬送コンベヤ装置において、前記案内レールの直下に空気噴射口を設けて、空気噴射口から噴射される加圧空気により容器が進行方向の推力を受け、かつ、鍔部が浮上方向への推力を受けるようにして、容器を搬送するとしている。
【0006】
しかしながら、前記特許文献1の技術では、加圧空気噴射箇所が案内レール直下の1箇所のみであり、容器搬送時に容器胴部に作用する空気抵抗力により容器胴部が搬送方向と逆方向に傾くことへの対応がなされていない恐れがある。
また、噴射された加圧空気流を、容器の搬送方向に、かつ、斜め上方に向かって空気案内通路(容器口部搬送通路)に侵入させて容器口部を推進するとしているので、この容器口部の推進によっても、鍔部を支点として容器胴部が搬送方向と逆方向に傾いてしまうため、容器の鍔部が案内レールに噛み込むことが多く、噛み込んだ容器の後続の容器がブロックされて所謂ジャム状態になることが多いという恐れがある。また、例えば容器胴部の断面形状が砲弾状等円筒状ではない場合には、推進力により前傾する力が発生しやすく、特に、容器の搬送が停止した場合には、容器口部にかかる推進力で容器が前傾方向に傾いて安定してしまう状態となりやすいため、容器姿勢を正立状態に保つという対応ができないという恐れがある。
【0007】
また、前記特許文献2によれば、容器の首部に形成されたフランジ(鍔部)の下面を支持する対向した一対のレールから成るネックレールに支持されている容器をエアの搬送力で搬送する容器搬送装置において、フランジの上方に加圧エアで容器口部全体に推力を与えるエアダクト(トップブロアからエア吹き込み)と、フランジの下方に加圧エアで容器胴部に推力を与えるサイドブロアを設けて容器を搬送するとしている。
【0008】
しかしながら、前記特許文献2の技術では、加圧エア吹付け箇所を容器フランジ上方と下方の2箇所としているが、容器フランジ上方に吹付けられた加圧エアによる容器口部の推力が、フランジ下面を支点として容器姿勢を搬送方向と逆方向に傾けるように作用してしまうという恐れがある。
また、容器搬送時に空気流を受ける面積が大きい容器胴部に作用する空気抵抗力が大きく、フランジ下面を支点としてこの空気抵抗力による容器姿勢の搬送方向と逆方向に傾こうとする作用が大きい。前記フランジ下方での容器胴部へのサイドブロアによるエア吹付けは、上記フランジ上方での容器口部への加圧エア吹付けによる容器姿勢の搬送方向と逆方向への傾きを矯正する働きと、前記空気抵抗力による容器姿勢の搬送方向と逆方向への傾きを矯正しようとする働きをするが、サイドブロアによるエア吹付けの対象となる容器胴部の形状には多種多様な形状があり、エア吹付け力が一定せず、容器形状に適合させた位置にエア吹付け部材を配設することが実際上は不可能であり、容器搬送時の容器姿勢が正立状態を保持することが不可能となる恐れがある。
このために容器が搬送される際、容器首部のフランジがネックレールに噛み込むことが多く、噛み込んだ容器の後続の容器がブロックされて、所謂ジャム状態になることが多いという恐れがある。
【0009】
本発明は、首部に鍔部を有する容器の鍔部下面に当接する対向した一対のレールから成る支持装置(ネックレール)で容器を支持した状態で、圧力流体(例えば加圧空気)を噴出させる加圧空気噴出手段により容器を搬送する容器搬送装置において、多種多様な容器胴部形状に対しても特別なサイドブロー装置やその位置調整を必要とせずに、容器を正立状態に保ったまま搬送して、搬送容器の鍔部がネックレールに噛み込まない容器搬送装置を提供し、さらに、容器特性(容器重量、容器鍔部より下の容器高さ、容器の幅、容器の直径、容器鍔部とネックレールとの摩擦係数等)および容器搬送能力が変わった場合でも、独立して容器を正立状態に保つように自動的に制御できる容器搬送装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
前記の課題に対し、本発明は以下の手段により解決を図る。
(1)第1の手段の容器搬送装置は、首部(ネック)に鍔部を有する容器(通称PETボトルと言われる軽量容器)の鍔部下面に当接する対向した一対のレールから成る支持装置(以下ネックレールと称する)に容器を支持した状態で、圧力流体(例えば加圧空気。以下加圧空気と称する)を噴出させる加圧空気噴出手段により容器を搬送する容器搬送装置において、前記加圧空気噴出手段を、前記ネックレールに対して前記鍔部の下側(ネックレール下部)には容器搬送方向への力を与えるための加圧空気を噴出する推進装置と、前記鍔部より上部の容器口部には容器搬送方向とは逆向きの力を与えるための加圧空気を噴出する姿勢制御装置とから構成したことを特徴とする。
【0011】
(2)第2の手段の容器搬送装置は、前記第1の手段の容器搬送装置において、前記姿勢制御装置は、容器が前記ネックレールで支持されて搬送されることにより、容器の搬送速度に比例して発生する空気の抵抗力によって、前記鍔部より下方部(容器胴部)が容器搬送方向とは逆方向へ傾斜することを防止するために必要な加圧空気を噴出するように、風量調整装置を備えたことを特徴とする。
【0012】
(3)第3の手段の容器搬送装置は、前記第2の手段の容器搬送装置において、前記風量調整装置は、必要な風量設定値が制御装置からの指令で自動的に設定されるようにしたことを特徴とする。
【0013】
(4)第4の手段の容器搬送装置は、前記第1から第3の手段の容器搬送装置において、前記推進装置で発生させる前記加圧空気の圧力と前記姿勢制御装置に発生させる前記加圧空気の圧力が、予め設定された容器特性(容器重量、容器鍔部より下の容器高さ、容器の幅、容器の直径、容器鍔部と前記ネックレールとの摩擦係数等)と搬送能力で決まる既知の基準データにより、前記制御装置で自動的に設定されることを特徴とする。
【0014】
(5)第5の手段の容器搬送装置は、前記第1から第4の手段の容器搬送装置において、前記推進装置と前記姿勢制御装置が、前記加圧空気の噴出圧力を容器搬送通路全体に亘って供給するための圧力供給源となる共通の圧力チャンバーから形成されていることを特徴とする。
【0015】
(6)第6の手段の容器搬送装置は、前記第1から第5の手段の容器搬送装置において、搬送される容器口部の外径方向および高さ方向の寸法が容器の胴部サイズに関わらず同一であることを利用し、前記姿勢制御装置を形成している容器口部搬送通路の断面の大きさは、容器の口部外径方向および高さ方向が容器搬送中に発生する容器の揺れによって該容器口部搬送通路を形成する部材に干渉しないために必要な隙間を有する極小の大きさとし、容器口部に作用する加圧空気の噴出速度の安定領域を利用できるように構成したことを特徴とする。
【0016】
(7)第7の手段の容器搬送装置は、前記第1から第6の手段の容器搬送装置において、前記姿勢制御装置を前記容器口部搬送通路の側面部と天面部の何れか一方、または、両方に設けたことを特徴とする。
【発明の効果】
【0017】
請求項1に係わる発明は、首部に鍔部を有する容器の鍔部下面に当接する対向した一対のレールから成るネックレールに容器を支持した状態で、加圧空気を噴出させる加圧空気噴出手段により容器を搬送する容器搬送装置において、前記加圧空気噴出手段を、前記ネックレール部に対して前記鍔部の下側(ネックレール下部)には容器搬送方向への力を与えるための加圧空気を噴出する推進装置と、前記鍔部より上部の容器口部には容器搬送方向とは逆向きの力を与えるための加圧空気を噴出する姿勢制御装置とから構成されるようにしたことにより、容器搬送に必要な推進力は前記推進装置によって与え、空気抵抗力によって容器の胴部が容器搬送方向とは逆方向へ傾斜しようとする力に対しては、前記姿勢制御装置によって容器を正立にする方向の力を与え、常に容器を正立状態に保つ働きをさせることで、容器を正立状態に保ったまま搬送できる。この正立させる力のバランス効果により容器の鍔部がネックレールに噛み込むことを防止することが可能となり、容器を安定して正立状態で搬送できるという効果を有する。
また、前記姿勢制御装置において、容器胴部が多種多様な形状でも、形状寸法が同一の容器口部に加圧空気を噴出するようにしたことにより、噴出する加圧空気の安定速度領域を利用できるため、容器を正立状態に保つために必要な力を安定的に保つことができるという効果を有する。
【0018】
請求項2に係わる発明は、前記請求項1に記載する容器搬送装置において、前記姿勢制御装置が風量調整装置を備えたことにより、容器の搬送に伴って容器胴部に発生する空気抵抗力により容器の胴部が容器搬送方向とは逆方向へ傾斜することを防止するために必要な圧力を加圧空気に与えることができるという効果を有する。
【0019】
請求項3に係わる発明は、前記請求項2に記載する容器搬送装置において、前記風量調整装置が、必要な風量設定値を制御装置からの指令で自動的に設定されるようにしたことにより、前記姿勢制御に必要な加圧空気の圧力が前記風量調整装置によって自動的に調整されるという効果を有する。
【0020】
請求項4に係わる発明は、前記請求項1から3に記載する容器搬送装置において、前記推進装置で発生させる前記加圧空気の圧力と前記姿勢制御装置に発生させる前記加圧空気の圧力が、予め設定された容器特性(容器重量、容器鍔部より下の容器高さ、容器の幅、容器の直径、容器鍔部とネックレールとの摩擦係数等)と搬送能力で決まる既知の基準データにより、前記制御装置で自動的に設定されるようにしてあるため、容器の形状、大きさ等の容器特性と容器の搬送能力に応じて自動的に姿勢制御できるという効果を有する。
【0021】
請求項5に係わる発明は、前記請求項1から4に記載する容器搬送装置において、前記推進装置と前記姿勢制御装置が、前記加圧空気の噴出圧力を容器搬送通路全体に亘って供給するための圧力供給源となる共通の圧力チャンバーから形成されていることにより、前記姿勢制御を前記容器の搬送能力と関連させて適切に制御できるという効果を有する。
さらに圧力供給源の構造を簡素にできるとともに、容器胴部にサイドブロア等での吹付け装置や調整手段を不要にできるという効果を有する。
【0022】
請求項6に係わる発明は、前記請求項1から5に記載する容器搬送装置において、搬送される容器口部の外径方向および高さ方向の寸法が容器の胴部サイズに関わらず同一であることを利用し、前記姿勢制御装置を形成している容器口部搬送通路の断面の大きさが、容器の口部外径方向および高さ方向が容器搬送中に発生する容器の揺れによって該容器口部搬送通路を形成する部材に干渉しないために必要な隙間を有する極小の大きさとし、容器口部に作用する加圧空気の噴出速度の安定領域を利用できるように構成したことにより、噴出する加圧空気が容器口部に作用する力を安定的にすることができるという効果を有する。
【0023】
請求項7に係わる発明は、前記請求項1から6に記載する容器搬送装置において、前記姿勢制御装置を前記容器口部搬送通路の側面部と天面部の何れか一方、または、両方に設けるようにしたことにより、前記姿勢制御を行うに当って、容器特性および容器搬送能力に応じて適切な姿勢制御装置の設置箇所を選択でき、前記姿勢制御を効果的に行うことができるという効果を有する。
【図面の簡単な説明】
【0024】
【図1】本発明の実施の形態に係わる容器搬送装置の側面断面図である。
【図2】図1のV2−V2断面図であり、一部図示を省略してある。
【図3】図1の正面図で、一部断面図としてあり、また、一部図示を省略してある。
【発明を実施するための形態】
【0025】
以下、この発明の実施の形態につき図面を参照しつつ詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。また、下記実施の形態における構成要素には、当業者が容易に想定できるもの、あるいは実質的に同一のものが含まれる。
(発明の実施の形態)
【0026】
本発明の実施の形態を図1から図3に基づいて説明する。
図1は、本発明の実施の形態に係わる容器搬送装置の側面断面図である。
図2は、図1のV2−V2断面図であり、一部図示を省略してある。
図3は、図1の正面図で、一部断面図としてあり、また、一部図示を省略してある。
【0027】
図1において、容器搬送装置1は、首部(ネック)に鍔部を有する容器Pの鍔部Phの下面に当接する対向した一対のネックレール(支持装置)5と、前記鍔部Phの下側にY方向(容器搬送方向)への力を与えるための圧力流体(例えば加圧空気。以下加圧空気と称する)を噴出する推進装置N2(噴出口N2。以下噴出口N2とも称する)と、前記鍔部Phより上部の容器口部PcにY方向とは逆向きの力を与えるための圧力流体(加圧空気)を噴出する姿勢制御装置N1(噴出口N1。以下噴出口N1とも称する)と、外壁6と搬送通路体7から成る前記加圧空気の圧力供給源となる共通の圧力チャンバー6rと、後述する制御装置8と、後述する風量調整装置10から主に構成されており、前記圧力チャンバー6rから噴出する加圧空気によって、容器PをY方向に搬送するようになっている。
本構成において、加圧空気噴出手段は推進装置N2と姿勢制御装置N1により構成されており、加圧空気の噴出方向はそれぞれY方向およびY方向とは逆向きとなっている。
【0028】
また、容器Pの鍔部Phより下方の胴部Pbは、Y方向に沿って設けられた覆い4a、覆い4bおよび覆い4cによって覆われており、該覆い4a、覆い4bおよび覆い4cは、本搬送装置のメインフレームの一部であるとともに、搬送容器Pを外部環境から保護するためのカバーの役目を果たすものであり、さらに、覆い4aおよび覆い4bには、搬送容器Pの胴部Pbが搬送中に側方へ揺れ振動するのを規制するガイド部材4dが設けられてており、該ガイド部材4dはシリンダ8によって容器Pの胴部Pb方向へ突き出し又は引き込みが自在に行われるようになっているが、前記覆い4a、覆い4bおよび覆い4cと前記ガイド部材4dは、何れも本発明の技術思想を規制する用件ではない。
【0029】
前記噴出口N1および噴出口N2は、容器Pの口部Pcの搬送通路7rおよび一対のネックレール5に対してそれぞれ対称位置に所定のピッチ間隔で設けられているが、図2は、中心線Y1より右半分が前記噴出口N1の配置を示し、中心線Y1より左半分が前記噴出口N2の配置を示している。
【0030】
前記噴出口N2は、図2に示すように、矢印w2の向きで、容器Pの鍔部Phの下面の容器Pの首部へ圧力チャンバー6rから加圧空気が噴出されるようになっていて、容器PにY方向へ搬送する推進力を与えている。また、前記噴出口N1は矢印w1の向きで、容器Pの口部Pcに向けて圧力チャンバー6rから加圧空気が噴出されるようになっていて、後述するように容器Pの姿勢制御をするようになっている。
【0031】
前記噴出口N1には、図1および図2に示すように、風量調整装置10が設けられており、該風量調整装置10の風量調整機構は、圧力チャンバー6rに設けられている風量調整具11が、外壁6を気密に貫通して摺動するロッド12を介して、前記覆い4aおよび覆い4bに取付け具16を介して取付けられた駆動装置15の作動により、噴出口N1からの位置を矢印10sのように変更させ、加圧空気が通過する開度を調整することによって、前記圧力チャンバー6rから矢印w1の方向に噴出される加圧空気の風量を調整できる構成となっている。
なお、前記駆動装置15は、サーボシリンダ或いはサーボモータ等としてもよく、何れの場合も制御装置8からの指令により風量調節具11の設定位置が自動的に変更されるように作動する。
【0032】
前記制御装置8には、予め設定された容器特性(容器Pの重量、容器鍔部Phより下の容器Pの高さ、容器Pの幅、容器Pの直径、容器Pとネックレール5との摩擦係数等)と、容器Pの搬送能力で決められる既知の基準データが設定されており、該制御装置8からの指令により前記駆動装置15を作動させて、前記風量調整具11の矢印10s方向の位置が自動的に設定されることにより、前記噴射口N1から容器Pの口部Pcに噴出する前記加圧空気の風量(即ち、容器Pの口部Pcにかかる力)が自動的に設定されるようになっている。
【0033】
なお、前記噴出口N1が設けられている前記口部Pcの搬送通路7rの断面の大きさは、搬送中に容器Pに揺れが発生しても、前記口部Pcの外径方向および高さ方向が容器口部の搬送通路7rを形成している搬送通路体7に干渉しないために必要な隙間を有する極小の大きさとしてあり、前記口部Pcに与える噴出口N1からの加圧空気の力を安定的に維持することができる。
【0034】
上記説明では、前記噴出口N1を口部Pcの搬送通路7rの側面部(搬送通路体7の側面部)に設けた場合を示したが、噴出口N1は口部Pcの搬送通路7rの天面部(搬送通路体7の天面部)に設けてもよく、また、前記口部Pcの搬送通路7rの側面部と天面部の両方に設けてもよい。
【0035】
また、ここでは、前記噴出口N2から噴出される加圧空気の圧力は、図示しない圧力供給装置から供給される前記圧力チャンバー6r内の加圧空気の圧力に比例的に設定されるようにしてあるが、前記噴出口N2にも、前記風量調整装置10と同様の風量調整装置を設けて、前記圧力チャンバー6rから矢印w2の方向に噴出される加圧空気の風量(即ち、推進装置N2の推進力)を調整するようにしてもよく、前記圧力チャンバー6rに付加する圧力も前記噴出口N2から噴出される加圧空気の圧力も、前記制御装置8によって自動的に設定されるようになっている。
【0036】
次に、本発明の実施の形態に係わる容器搬送装置1の作用を説明する。
例えば加圧空気のようなガス流体が噴出口から噴出される場合、該噴出流体は、噴出口から吹付け対象とする箇所までの距離に反比例して速度が減衰することが知られている。即ち、噴出圧力が一定でも容器Pの口部Pcに働く力は、噴出口の面積と噴出口からの距離によって変動することになる。
従って、本発明では、前記噴出口N1および噴出口N2から噴出される加圧空気を安定した力として働かせるために、搬送通路7rの構造を搬送上必要な極小空間となる大きさに構成している。
【0037】
前記一対のネックレール5により鍔部Phの下面を支持されて、前記加圧空気噴出手段から噴出された加圧空気によって姿勢制御されながら搬送される容器Pに作用する力について、図3をもとに説明する。
容器Pが搬送される際に容器Pの胴部Pbが受ける空気抵抗力Fbwと容器Pの口部Pcに発生する空気抵抗力Fcn、前記口部Pcへ前記噴出口N1から噴出される加圧空気によって受ける姿勢制御力Fcwと、容器Pが搬送される際に前記鍔部Phと前記ネックレール5との間に作用する摩擦力Fμ、静止している容器Pを必要な速度まで加速させるに必要な加速力Fαからなる全負荷力(抵抗力)に対し、容器Pを搬送するために必要な推進力F2が前記噴出口N2からの加圧空気の噴出力で与えられる。
【0038】
次に、搬送中の容器Pの姿勢と力の関係は、前記ネックレール5の搬送面から前記容器胴部Pbの重心までの距離をHb、ネックレール5の上面から容器口部Pcの中心までの距離をHcとすると、ネックレール5で支持されている位置を基準とするモーメントのバランスが成り立つ必要がある。
容器Pをネックレール5で支持して搬送する力の関係は、
容器Pを時計廻りへ回転させるモーメント:Fbw×Hb
容器Pを反時計廻りへ回転させるモーメント:(Fcw+Fcn)×Hc
容器Pを搬送するために必要な力:F2=Fbw+Fμ+Fα+Fcw+Fcn
ここに、
Fbw×Hb=(Fcw+Fcn)×Hc より、
Fcw=(Fbw×Hb−Fcn×Hc)/Hc となり、
姿勢制御装置N1の姿勢安定に必要な力が決められる。
【0039】
前記容器胴部Pbが受ける空気抵抗力Fbwは、基本的には容器Pの搬送速度によって容器胴部Pbの投影面積が受ける空気の抵抗力であり、容器胴部Pbの投影面積が大きい大形容器や、搬送速度が高速になる程この空気抵抗力が強くなる。また、このような条件になる程搬送に必要な推進力F2も強くなり、このために後述する噴出口N1からの加圧空気の噴出が無い場合には、搬送される容器Pは正立状態から、図3の二点鎖線で示すように、容器胴部PbがY方向とは逆向き(時計廻り)に傾く傾向が発生しやすくなる。その結果、前記鍔部Phの進行方向端部が前記一対のネックレール5の搬送面に食い込む等の状態を誘発させ、容器Pを所定速度で搬送することが出来ない状態や、最悪の場合には、所謂ジャム状態(容器Pが傾斜したままで連なって停止)となってしまう。
【0040】
前記空気抵抗力Fbw、前記空気抵抗力Fcn、前記姿勢制御力Fcwおよび前記摩擦力Fμ、前記推進力F2は、容器Pの容器特性(容器Pの重量、容器鍔部Phより下の容器Pの高さ、容器Pの幅、容器Pの直径、容器Pとネックレール5との摩擦係数等)、および、容器Pの搬送能力(搬送速度)によって決定されるが、該容器特性と搬送能力を予め既知の基準データとして制御装置8に設定入力してあり、制御装置8により、前記圧力供給源となる圧力チャンバー6rへの設定圧力も、前記風量調整装置10の駆動装置15による作動量も自動的に設定されるため、推進力と姿勢制御に必要な力を自動的に設定できる。
【0041】
以上説明したように、前記制御装置8は、推進力と姿勢制御力を自動的に制御することによって、前記容器Pは正立状態を保持しながら安定した姿勢でY方向へ搬送されることができる。
【符号の説明】
【0042】
1 容器搬送装置
5 (一対の)ネックレール(支持装置)
6 外壁
6r 圧力チャンバー
7 搬送通路体
7r 容器口部搬送通路
10 風量調整装置
11 風量調整具
15 (風量調整装置の)駆動装置
F2 容器推進力
Fα 容器加速力
Fbw 容器胴部が受ける空気抵抗力
Fcn 容器口部が受ける空気抵抗力
Fcw 容器口部の姿勢制御力
Fμ 容器とネックレールとの摩擦抵抗力
N1 噴出口(姿勢制御装置)
N2 噴出口(推進装置)
P 容器
Pb (容器Pの)胴部
Pc (容器Pの)口部
Ph (容器Pの)鍔部
【特許請求の範囲】
【請求項1】
首部(ネック)に鍔部を有する容器(通称PETボトルと言われる軽量容器)の鍔部下面に当接する対向した一対のレールから成る支持装置(以下ネックレールと称する)に容器を支持した状態で、圧力流体(例えば加圧空気。以下加圧空気と称する)を噴出させる加圧空気噴出手段により容器を搬送する容器搬送装置において、
前記加圧空気噴出手段を、前記ネックレールに対して前記鍔部の下側(ネックレール下部)には容器搬送方向への力を与えるための加圧空気を噴出する推進装置と、前記鍔部より上部の容器口部には容器搬送方向とは逆向きの力を与えるための加圧空気を噴出する姿勢制御装置とから構成したことを特徴とする容器搬送装置。
【請求項2】
請求項1に記載する容器搬送装置において、
前記姿勢制御装置は、容器が前記ネックレールで支持されて搬送されることにより容器の搬送速度に比例して発生する空気の抵抗力によって、前記鍔部より下方部(容器胴部)が容器搬送方向とは逆方向へ傾斜することを防止するために必要な加圧空気を噴出するように、風量調整装置を備えたことを特徴とする容器搬送装置。
【請求項3】
請求項2に記載する容器搬送装置において、
前記風量調整装置は、必要な風量設定値が制御装置からの指令で自動的に設定されるようにしたことを特徴とする容器搬送装置。
【請求項4】
請求項1から3のいずれか一項に記載する容器搬送装置において、
前記推進装置で発生させる前記加圧空気の圧力と前記姿勢制御装置に発生させる前記加圧空気の圧力が、予め設定された容器特性(容器重量、容器鍔部より下の容器高さ、容器の幅、容器の直径、容器鍔部と前記ネックレールとの摩擦係数等)と搬送能力で決まる既知の基準データにより、前記制御装置で自動的に設定されることを特徴とする容器搬送装置。
【請求項5】
請求項1から4のいずれか一項に記載する容器搬送装置において、
前記推進装置と前記姿勢制御装置が、前記加圧空気の噴出圧力を容器搬送通路全体に亘って供給するための圧力供給源となる共通の圧力チャンバーから形成されていることを特徴とする容器搬送装置。
【請求項6】
請求項1から5のいずれか一項に記載する容器搬送装置において、
搬送される容器口部の外径方向および高さ方向の寸法が容器の胴部サイズに関わらず同一であることを利用し、前記姿勢制御装置を形成している容器口部搬送通路の断面の大きさは、容器の口部外径方向および高さ方向が容器搬送中に発生する容器の揺れによって該容器口部搬送通路を形成する部材に干渉しないために必要な隙間を有する極小の大きさとし、容器口部に作用する加圧空気の噴出速度の安定領域を利用できるように構成したことを特徴とする容器搬送装置。
【請求項7】
請求項1から6のいずれか一項に記載する容器搬送装置において、
前記姿勢制御装置を前記容器口部搬送通路の側面部と天面部の何れか一方、または、両方に設けたことを特徴とする容器搬送装置。
【請求項1】
首部(ネック)に鍔部を有する容器(通称PETボトルと言われる軽量容器)の鍔部下面に当接する対向した一対のレールから成る支持装置(以下ネックレールと称する)に容器を支持した状態で、圧力流体(例えば加圧空気。以下加圧空気と称する)を噴出させる加圧空気噴出手段により容器を搬送する容器搬送装置において、
前記加圧空気噴出手段を、前記ネックレールに対して前記鍔部の下側(ネックレール下部)には容器搬送方向への力を与えるための加圧空気を噴出する推進装置と、前記鍔部より上部の容器口部には容器搬送方向とは逆向きの力を与えるための加圧空気を噴出する姿勢制御装置とから構成したことを特徴とする容器搬送装置。
【請求項2】
請求項1に記載する容器搬送装置において、
前記姿勢制御装置は、容器が前記ネックレールで支持されて搬送されることにより容器の搬送速度に比例して発生する空気の抵抗力によって、前記鍔部より下方部(容器胴部)が容器搬送方向とは逆方向へ傾斜することを防止するために必要な加圧空気を噴出するように、風量調整装置を備えたことを特徴とする容器搬送装置。
【請求項3】
請求項2に記載する容器搬送装置において、
前記風量調整装置は、必要な風量設定値が制御装置からの指令で自動的に設定されるようにしたことを特徴とする容器搬送装置。
【請求項4】
請求項1から3のいずれか一項に記載する容器搬送装置において、
前記推進装置で発生させる前記加圧空気の圧力と前記姿勢制御装置に発生させる前記加圧空気の圧力が、予め設定された容器特性(容器重量、容器鍔部より下の容器高さ、容器の幅、容器の直径、容器鍔部と前記ネックレールとの摩擦係数等)と搬送能力で決まる既知の基準データにより、前記制御装置で自動的に設定されることを特徴とする容器搬送装置。
【請求項5】
請求項1から4のいずれか一項に記載する容器搬送装置において、
前記推進装置と前記姿勢制御装置が、前記加圧空気の噴出圧力を容器搬送通路全体に亘って供給するための圧力供給源となる共通の圧力チャンバーから形成されていることを特徴とする容器搬送装置。
【請求項6】
請求項1から5のいずれか一項に記載する容器搬送装置において、
搬送される容器口部の外径方向および高さ方向の寸法が容器の胴部サイズに関わらず同一であることを利用し、前記姿勢制御装置を形成している容器口部搬送通路の断面の大きさは、容器の口部外径方向および高さ方向が容器搬送中に発生する容器の揺れによって該容器口部搬送通路を形成する部材に干渉しないために必要な隙間を有する極小の大きさとし、容器口部に作用する加圧空気の噴出速度の安定領域を利用できるように構成したことを特徴とする容器搬送装置。
【請求項7】
請求項1から6のいずれか一項に記載する容器搬送装置において、
前記姿勢制御装置を前記容器口部搬送通路の側面部と天面部の何れか一方、または、両方に設けたことを特徴とする容器搬送装置。
【図1】


【図2】

【図3】
【図2】
【図3】
【公開番号】特開2012−126522(P2012−126522A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−280274(P2010−280274)
【出願日】平成22年12月16日(2010.12.16)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月16日(2010.12.16)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
[ Back to top ]