
容器搬送装置
【課題】多種多様な大きさ、形状の容器に対応しやすくに、型替え時間を短縮できる容器搬送装置を提供する。
【解決手段】回転式の容器搬送装置1は、容器Pの胴部を把持する一対の開閉式グリッパ11aから成り、円周等分に配置された容器把持装置10と、容器Pの底部を受けて容器と共に回転する容器底部受け板6と、容器頭部の位置決めをする容器頭部位置決め部材40から構成されている。
【解決手段】回転式の容器搬送装置1は、容器Pの胴部を把持する一対の開閉式グリッパ11aから成り、円周等分に配置された容器把持装置10と、容器Pの底部を受けて容器と共に回転する容器底部受け板6と、容器頭部の位置決めをする容器頭部位置決め部材40から構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、円周等分に設けられた容器把持装置で容器を把持して搬送する回転式の容器搬送装置に関する。
【背景技術】
【0002】
従来、キャップ巻き締め装置等或いはその上下流側でPETボトル等の容器を搬送する回転式容器搬送装置においては、容器の口部を把持して搬送する容器把持装置を備えた回転式容器搬送装置が公知となっている。(特許文献1)
【0003】
近年、容器の大きさ、形状が多様化しており、多様化した容器の種類が変わっても、容器搬送装置の構成部品を交換することなく、構成部品の位置変更等のみで多種多様な大きさ、形状の容器に対応できる容器搬送装置提供の要求が高まりつつある。
また、容器を形成する材料節約の観点から容器が薄肉化の傾向にあり、薄肉容器の胴部のみを把持する場合には、容器を潰してしまう恐れがあるため、薄肉容器でも容器を確実に把持できるようにする容器搬送装置提供の要求が高まりつつある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−247413号公報(図4)
【発明の概要】
【発明が解決しようとする課題】
【0005】
前記特許文献1によれば、回転式容器搬送装置は、該搬送装置の搬送ピッチ円部に設けたネックリング保持機構によって容器口部のネックリングを保持(把持)して容器を搬送し、前記ネックリング保持機構で保持した容器口部とは別の容器口部箇所を保持して容器を受け取る容器受取り機構によって下流側の回転式中間搬送部への受渡しを行って、順次下流側へ受渡しながら容器を搬送するとしている。
【0006】
しかしながら、前記特許文献1の技術では、口部や胴部等の大きさが異なった容器を搬送する場合には、ネックリング保持機構又は容器受取り機構等の構成部品を交換して型替え対応をしなければならず、型替え部品の種類が増えてしまうと共に型替えに多大の時間を要するという恐れがあり、大きさ、形状が多様化した容器種類の変更に対して更なる工夫が要望されている。
【0007】
本発明は、このような事情を考慮して、多種多様な大きさ、形状の容器に対応しやすくするように、容器搬送時における容器の把持等に際して型替え部品の種類を増やさずに、型替え時間を短縮できる容器搬送装置を提供すること、および、薄肉容器でも容器を潰さずに確実に把持して搬送できる容器搬送装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
前記の課題に対し、本発明は以下の手段により解決を図る。
(1)第1の手段の容器搬送装置は、円周等分に設けられた容器把持装置で容器を把持して搬送する回転式の容器搬送装置において、前記容器の胴部を把持する一対の開閉式グリッパから成る容器把持装置と、前記容器の底部を受けて前記容器と共に回転する容器底部受け板と、前記容器頭部の位置決めをする容器頭部位置決め部材から構成されたことを特徴とする。
【0009】
(2)第2の手段の容器搬送装置は、前記第1の手段の容器搬送装置において、前記一対の開閉式グリッパを、前記容器の底部又は底部近辺で胴部を把持するように構成したことを特徴とする。
【0010】
(3)第3の手段の容器搬送装置は、前記第1および第2の手段の容器搬送装置において、前記容器を前記容器把持装置で把持する際に前記容器胴部に当接して該容器搬送装置の半径方向の位置決めをする容器胴部位置決め部材をさらに設けたことを特徴とする。
【0011】
(4)第4の手段の容器搬送装置は、前記第3の手段の容器搬送装置において、前記容器胴部位置決め部材に移動機構を設けて、前記容器胴部の大きさ、形状の変更に伴う位置決めの位置変更が部品交換を伴うことなく可能となるように構成したことを特徴とする。
【0012】
(5)第5の手段の容器搬送装置は、前記第1から第3の手段の容器搬送装置において、前記容器を上流側から該容器搬送装置へ、或いは、該容器搬送装置から下流側へ受渡しの際に、前記容器胴部の外周部をガイドしながら前記容器を前記容器把持装置の所定位置方向、或いは、下流側の所定位置方向へガイドする案内ガイドをさらに設けたことを特徴とする。
【0013】
(6)第6の手段の容器搬送装置は、前記第5の手段の容器搬送装置において、前記案内ガイドに移動機構を設けて、前記容器胴部の大きさ、形状の変更に伴う案内ガイド位置の変更が部品交換を伴うことなく可能となるように構成したことを特徴とする。
【0014】
(7)第7の手段の容器搬送装置は、前記第1の手段の容器搬送装置において、前記容器頭部位置決め部材を、前記容器把持装置と関連して円周等分に設けられ、前記容器頭部に当接する溝を有するスターホイールで構成したことを特徴とする。
【0015】
(8)第8の手段の容器搬送装置は、前記第7の手段の容器搬送装置において、前記スターホイールを、前記容器頭部に当接可能な溝を有するスターホイール板2対を重ねて相対的に所定量の位置ずれをさせて、前記2対を重ねた状態で前記溝の大きさ、形状が変更されることにより、前記容器頭部の大きさ、形状の変更に伴う位置決めの位置変更が部品交換を伴うことなく可能となるように構成したことを特徴とする。
【0016】
(9)第9の手段の容器搬送装置は、前記第7および第8の手段の容器搬送装置において、前記容器頭部位置決め部材に、前記容器の回転搬送による遠心力で前記容器頭部が外周側に逃げないように回転搬送の外周側で前記容器頭部をガイドして位置決めする頭部ガイドをさらに設けたことを特徴とする。
【0017】
(10)第10の手段の容器搬送装置は、前記第9の手段の容器搬送装置において、前記頭部ガイドに移動機構を設けて、前記容器頭部の大きさ、形状変更に伴う前記容器頭部位置決めの位置変更が部品交換を伴うことなく可能となるように構成したことを特徴とする。
【0018】
(11)第11の手段の容器搬送装置は、前記第1から第10の手段の容器搬送装置において、前記容器把持装置、前記容器底部受け板、前記容器頭部位置決め部材、前記容器胴部位置決め部材、前記案内ガイドの何れか一つ又は二つ以上が高さ方向の設定位置を変更できる昇降機構を備えて、該昇降機構による昇降によって容器高さの変更に対応できるように構成したことを特徴とする。
【0019】
(12)第12の手段の容器搬送装置は、前記第11の手段の容器搬送装置において、前記容器把持装置の高さ方向設定位置の変更に際して、前記一対の開閉式グリッパの開閉機構となるカムフォロアとカムの何れか一方の高さ方向の長さが、前記容器高さの変更範囲に対応できる長さを有するように構成したことを特徴とする。
【発明の効果】
【0020】
請求項1に係わる本発明は、円周等分に設けられた容器把持装置で容器を把持して搬送する回転式の容器搬送装置において、前記容器の胴部を把持する一対の開閉式グリッパから成る容器把持装置と、前記容器の底部を受けて前記容器と共に回転する容器底部受け板と、前記容器頭部の位置決めをする容器頭部位置決め部材から構成したことにより、前記容器が薄肉容器の場合でも容器を潰さずに確実に把持して回転搬送できるという効果、および、前記薄肉容器に液体が充填されていて液体入り容器の重量が大きくても容器底部受け板に受けられて容器形状が崩されることなく比較的弱い把持力で容器を回転搬送できるという効果を有する。
【0021】
請求項2に係わる本発明は、前記請求項1に記載する容器搬送装置において、前記一対の開閉式グリッパを、前記容器の底部又は底部近辺で胴部を把持するように構成したことにより、容器の底部又は底部近辺は比較的剛性が高いので、前記容器が薄肉容器の場合でも容器把持が確実にできるという効果を有する。
【0022】
請求項3に係わる本発明は、前記請求項1および2に記載する容器搬送装置において、前記容器を前記容器把持装置で把持する際に前記容器胴部に当接して該容器搬送装置の半径方向の位置決めをする容器胴部位置決め部材をさらに設けたことにより、前記容器を所定位置に確実に位置決めして前記容器把持装置で把持できるという効果を有する。
【0023】
請求項4に係わる本発明は、前記請求項3に記載する容器搬送装置において、前記容器胴部位置決め部材に移動機構を設ける構成としたことにより、前記容器胴部の大きさが変更となる場合においても位置決め部材を交換することなく短時間に対応できるという効果を有する。
【0024】
請求項5に係わる本発明は、前記請求項1から3に記載する容器搬送装置において、前記容器を上流側から該容器搬送装置へ、或いは、該容器搬送装置から下流側へ受渡しの際に、前記容器胴部の外周部をガイドしながら前記容器を前記容器把持装置の所定位置方向、或いは、下流側の所定位置方向へガイドする案内ガイドをさらに設けたことにより、前記受渡しの際に、容器の回転搬送方向が変わっても容器の位置ずれを生ずることなく、安定して受渡しができるという効果を有する。
【0025】
請求項6に係わる本発明は、前記請求項5に記載する容器搬送装置において、前記案内ガイドに移動機構を設ける構成としたことにより、前記容器胴部の大きさ、形状の変更に伴う案内ガイド位置の変更が部品交換を伴うことなく短時間で可能となるという効果を有する。
【0026】
請求項7に係わる本発明は、前記請求項1に記載する容器搬送装置において、前記容器頭部位置決め部材を、前記容器把持装置と関連して円周等分に設けられ、前記容器頭部に当接する溝を有するスターホイールで構成したことにより、容器胴部と容器頭部の軸心を一体にして容器搬送できるという効果を有する。
【0027】
請求項8に係わる本発明は、前記請求項7に記載する容器搬送装置において、前記スターホイールを、前記容器頭部に当接可能な溝を有するスターホイール板2対を重ねて相対的に所定量の位置ずれをさせて、前記2対を重ねた状態で前記溝の大きさ、形状が変更される構成としたことにより、前記容器頭部の大きさ、形状の変更に伴う位置決めの位置変更が部品交換を伴うことなく短時間で可能となるという効果を有する。
【0028】
請求項9に係わる本発明は、前記請求項7および8に記載する容器搬送装置において、前記容器頭部位置決め部材に、回転搬送の外周側で前記容器頭部をガイドして位置決めする頭部ガイドをさらに設けたことにより、前記容器の回転搬送による遠心力で前記容器頭部が外周側に逃げないようにすることができるという効果を有する。
【0029】
請求項10に係わる本発明は、前記請求項9に記載する容器搬送装置において、前記頭部ガイドに移動機構を設ける構成としたことにより、前記容器頭部の大きさ、形状変更に伴う前記容器頭部位置決めの位置変更が部品交換を伴うことなく可能となるという効果を有する。
【0030】
請求項11に係わる本発明は、前記請求項1から10に記載する容器搬送装置において、前記容器把持装置、前記容器底部受け板、前記容器頭部位置決め部材、前記容器胴部位置決め部材、前記案内ガイドの何れか一つ又は二つ以上が高さ方向の設定位置を変更できる昇降機構を備えた構成としたことにより、該昇降機構による昇降によって容器高さの変更に短時間で対応できるという効果を有する。
【0031】
請求項12に係わる本発明は、前記請求項11に記載する容器搬送装置において、前記容器把持装置の高さ方向設定位置の変更に際して、前記一対の開閉式グリッパの開閉機構となるカムフォロアとカムの何れか一方の高さ方向の長さが、前記容器高さの変更範囲に対応できる長さを有するように構成したことにより、前記容器高さの変更に際して、構成部品を交換することなく短時間で対応できるという効果を有する。
【図面の簡単な説明】
【0032】
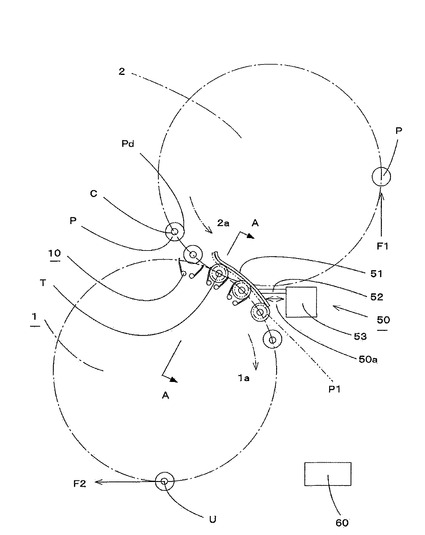
【図1】本発明の実施の形態に係わる容器搬送装置を組み込んだ容器搬送ラインの一部を概念的に示す平面図であり、容器の図示が一部省略してある。
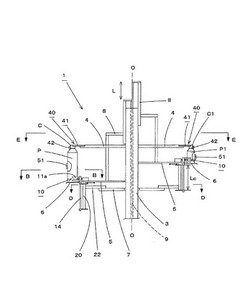
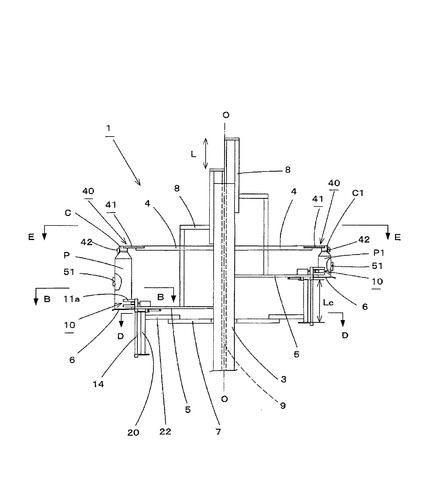
【図2】本発明の実施の形態に係わる容器搬送装置の正面断面図で、図1のA−A断面図に相当するものである。
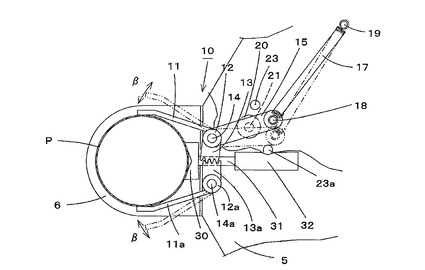
【図3】図2のB−B断面図で、一部切断としてある。
【図4】図3の正面図である。
【図5】図2のD−D断面図で、図1に相当する図である。
【図6】図2のE−E断面図で、図5に相当する図であり、一部省略してある。
【図7】図6の記号41を説明する図である。
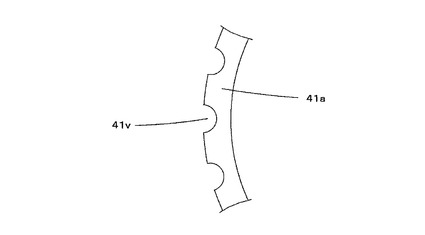
【図8】図7の記号41aを説明する図である。
【発明を実施するための形態】
【0033】
以下、この発明の実施の形態につき図面を参照しつつ詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。また、下記実施の形態における構成要素には、当業者が容易に想定できるもの、あるいは実質的に同一のものが含まれる。
【0034】
(本発明の実施の形態)
本発明の実施の形態を図1から図8に基づいて説明する。
図1は、本発明の実施の形態に係わる容器搬送装置を組み込んだ容器搬送ラインの一部を概念的に示す平面図であり、容器の図示が一部省略してある。
図2は、本発明の実施の形態に係わる容器搬送装置の正面断面図で、図1のA−A断面図に相当するものである。
図3は、図2のB−B断面図で、一部切断としてある。
図4は、図3の正面図である。
図5は、図2のD−D断面図で、図1に相当する図である。
図6は、図2のE−E断面図で、図5に相当する図であり、一部省略してある。
図7は、図6の記号41を説明する図である。
図8は、図7の記号41aを説明する図である。
【0035】
図1において、容器Pは、上流のF1方向からキャップ巻き締め装置2に供給され、該キャップ巻き締め装置2で矢印2a方向に回転搬送されている間に口部(頭部)にキャップCが被せられて巻き締められた後、図示T点で下流側の容器搬送装置1へ受け渡されるようになっている。
口部にキャップCを巻き締められた容器P(以下、キャップCを巻き締められた容器Pを単に容器P又はキャップCと称することがある。)の胴部Pdは、案内ガイド装置50にガイドされて容器搬送装置1の半径方向の内側へ所要量押し込まれながら、前記容器搬送装置1の後述する容器胴部位置決め部材30に位置決めされつつ容器把持装置10に把持されて矢印1a方向に回転搬送され、さらに図示U点で下流側のF2の方向へ搬出されていくようになっている。
【0036】
図2において、容器搬送装置1の回転中心O−Oに対して、図示左側は大きさ(容器胴部の直径、キャップCの直径、容器の高さ。以下同様。)が大きい容器Pの搬送状態を示し、図示右側は大きさが小さい容器P1の搬送状態を示しているが、容器Pは、底部近辺の胴部が図示しない駆動装置によって回転する回転軸3に上下方向摺動可能で該回転軸3とともに回転する回転円板5に取付けられた容器把持装置10によって把持され、底部が前記回転円板5に取付けられた容器底部受け板6によって載置され、また、容器Pの頭部のキャップCの外周部が容器頭部位置決め部材40に位置決めされて搬送されるように構成されていて、同様に、容器P1は、底部近辺の胴部が前記容器把持装置10によって把持され、底部が前記容器底部受け板6によって載置され、容器P1の頭部のキャップC1の外周部が容器頭部位置決め部材40に位置決めされて搬送されるように構成されている。
【0037】
前記回転円板5には上下機構8が取り付けられていて、該上下機構8が、図2に示すように、図示しない駆動装置により図示L方向に上下動される軸9を介して上下動されることによって、前記回転円板5が上下動されるようになっており、それに伴って前記容器Pと容器P1等の高さ変更に対応して前記容器把持装置10および前記容器底部受け板6が上下動されるようになっている。
【0038】
前記容器把持装置10の構成について、図2、図3、図4を基に更に詳しく説明すると、容器Pの底部Ps近辺の胴部Pdを把持する一対のグリッパ11およびグリッパ11aは、それぞれ段差軸14および軸14aとともに揺動回転するボス12およびボス12aと一体になっており、該ボス12およびボス12aに取付けられたギヤ片13およびギヤ片13aが互いに噛合って揺動することによって、図示実線と二点鎖線で示すように、β方向に開閉するようになっている。
なお、前記段差軸14および軸14aはそれぞれ前記回転円板5に設けられた穴に回転摺動するとともに、上下方向の位置設定がされるようになっている。さらに前記段差軸14の他端には支持レバー16が取り付けられている。
【0039】
また、前記ボス12にはレバー15が一体に設けられていて、該レバー15の他端に取付けられたピン18と前記回転円板5に取付けられたピン19に引張りばね17が懸架されている。
さらに、前記レバー15と前記支持レバー16の所定位置に取付けられた軸21の周りに回転するカムフォロア20が設けられていて、該カムフォロア20は図示しないフレームに固定された固定円板7に取付けられたカム22と係合するようになっていて、該カム22のカム軌跡によって前記レバー15が前記段差軸14の中心を支点として揺動回転するようになっている。
なお、前記カムフォロア20の長さLcは、前記容器把持装置10即ち前記回転円板5の前記上下動範囲に対応できるような長さとなっている。
また、前記レバー15は、前記回転円板5に取付けられたストッパ23或いはストッパ23aに当接することにより、前記グリッパ11とグリッパ11aが所定量以上それぞれ閉じないように或いは開かないように規制される構成となっている。
【0040】
前記説明のような容器把持装置10の構成により、容器Pは底部Ps近辺の胴部Pdが一対のグリッパ11およびグリッパ11aの閉作動によって把持されるようになっており、前記一対のグリッパ11およびグリッパ11aは容器把持部形状並びに開閉範囲が、予め設定された容器Pの胴部Pdの大きさの最大から最小まで対応できるようになっている。
なお、前記容器底部受け板6は、図3では各容器把持装置10に対応して個々に設けられた場合を示しているが、容器搬送装置1の全ての容器把持装置10に共通の円板状(リング状)のものとしてもよく、容器の底部が容器底部受け板とともに回転搬送されるものであればよい。
【0041】
また、容器Pの胴部Pdは、容器胴部位置決め部材30に当接することよって容器搬送装置1の半径方向に位置決めされるようになっているが、該容器胴部位置決め部材30が回転円板5に固定されたアクチュエータ32の作動によってロッド31を介して所定量前後進することによって、容器Pの胴部Pdの大きさ変更に対応できるように移動機構が構成されている。
【0042】
前記頭部位置決め部材40は、前記回転軸3に固定の回転円板4に取付けられたスターホイール41と、キャップCを回転搬送の外周側でガイドしてキャップCが回転搬送による遠心力で外周側へ逃げないように位置決めする図示しない支持装置に支持された頭部ガイド42により構成されている。
【0043】
前記スターホイール41について、図7および図8を基に説明すると、スターホイール41は、スターホイール板41aとスターホイール板41bの2対重ねで構成されている。前記スターホイール板41aは、図8に示すように、外周部に溝41v(図示では円弧形)が前記容器把持装置10の取付け円周ピッチと関連した円周ピッチで設けられていて、前記スターホイール板41bも前記スターホイール板41aと同様の形状となっており、前記スターホイール板41aと前記スターホイール板41bが2対重ねとなって形成する溝41gにキャップCの外周部が当接して、キャップCが容器搬送装置1の半径方向および円周方向に位置決めされるようになっている。
【0044】
前記溝41gは、図7に示すように、θ方向に前記スターホイール板41aとスターホイール板41bの互いの配置を位置変更することによって、キャップCの大きさ、形状の変更に対応できるように構成されているが、前記スターホイール板41aと前記スターホイール板41bの2対重ね配置の位置変更は図示しない移動機構によって行われるようになっている。
なお、前記説明では、溝41vを円弧形の形状として説明したが、U字形或いはV字形等としてもよく、キャップCの大きさ、形状変更に対応できる形状であればよい。
【0045】
また、前記頭部ガイド42は、図6に示すように、該容器搬送装置1の円周方向の所定範囲で円弧形の形状をしており、その両端が図示しない移動機構によって図示矢印H方向に移動することにより、図示二点鎖線で示す位置と図示実線で示す位置のように、回転搬送される容器Pの頭部(キャップC)の大きさに対応して、ガイド位置を変更できるようになっている。
【0046】
なお、前記案内ガイド装置50は、図1に示すように、容器Pの胴部Pdを案内ガイド51によってガイドして、容器Pを容器搬送装置1の半径方向の内側へ所要量押し込もうとするようになっているが、前記案内ガイド51は、図示しないフレームに取付けられたアクチュエータ53の作動によって矢印50aの方向に前後進するロッド52によって、容器Pの胴部Pdの大きさ変更に対応して前記押し込み所要量を変更できるように移動機構が構成されている。
【0047】
前記説明の容器底部受け板6の図示しない上下駆動装置による上下動、容器胴部位置決め部材30のアクチュエータ32による前後進、スターホイール40の前記スターホイール板41aとスターホイール板41bの図示しない移動機構による2対重ね配置位置の変更、前記頭部ガイド42の矢印H方向の移動、案内ガイド51のアクチュエータ53による前後進は、図示しない操作盤への指示操作により制御装置60からの指令で自動的に行うことができるようになっているが、手動で行うこととしてもよい。
【0048】
次に、本発明の実施の形態に係わる容器搬送装置1の作用を説明する。
容器Pは、キャップ巻き締め装置2で回転搬送中にその頭部にキャップCが被せられて巻き締められた後、T点近辺に搬送されてくると、容器Pの底部Psが容器底部受け板6に載置されながら、容器把持装置10のグリッパ11およびグリッパ11aが、引張りばね17の引張り作用に抗してカム22とカムフォロア20の係合軌跡により所要量開いて、底部Ps近辺の胴部Pdが把持されるようになるが、前記容器把持装置10による容器Pの把持の際、容器Pの胴部Pdが案内ガイド51にガイドされて容器搬送装置1の半径方向の内側へ所要量押し込まれようとするとともに、位置決め部材30に当接して容器搬送装置1の半径方向の位置決めがなされて、前記引張りばね17の引張り作用並びにカム22とカムフォロア20の係合軌跡によりグリッパ11およびグリッパ11aが閉じて容器Pの胴部Pdが把持され、また、容器Pの頭部のキャップCの外周部がスターホイール41の溝41gへの当接および頭部ガイド42によるガイドで、容器Pの頭部が容器搬送装置1の半径方向並びに円周方向の位置決めをされて、容器Pは矢印1aの方向に回転搬送される。
【0049】
前記説明のように容器Pの胴部PdおよびキャップCが位置決めされて、容器把持装置10により容器Pの底部Ps近辺の胴部Pdが把持され、容器底部受け板6に載置された容器Pは、矢印1aの方向に回転搬送されて図示U点近辺に達すると、容器把持装置10のグリッパ11およびグリッパ11aが引張りばね17の引張り作用に抗してカム22とカムフォロア20の係合軌跡により所要量開いて、下流側のF2方向へ受け渡され、搬送されていく。
【0050】
なお、前記容器把持装置10のグリッパ11およびグリッパ11aが容器Pの底部Ps近辺の胴部Pdを把持することにより、容器Pの底部Ps或いは底部Ps近辺が一般的に容器Pの高さ方向中央部の胴部Pdと比較して高剛性であるので、薄肉容器の場合でも容器Pを確実に把持することができ、さらに、容器Pの底部Psが容器底部受け板6に載置されているので、容器P内に液体が充填されて容器Pの重量が大きくなっても重力の作用で容器Pの形状が崩れることはなく、また前記グリッパ11およびグリッパ11aの容器Pの把持力が比較的弱くても安定して容器Pを回転搬送することができる。
【0051】
容器Pの高さが変更となる場合は、図示しない操作盤への指示操作により制御装置60からの指令で、図示しない駆動装置によって上下機構8が上下動されることに伴い、回転円板5の上下動を介して前記容器把持装置10および前記容器底部受け板6が上下動して、容器Pの高さ変更に対応することができる。
この場合において、カムフォロア20が高さ方向に所要長さLcを有する構成としてあるので、前記容器把持装置10が上下動しても、そのまま前記カムフォロア20と前記カム22との係合が適切に行われ、部品交換を伴うことなくグリッパ11およびグリッパ11aの開閉が適切に行われる。
【0052】
また、容器Pの胴部Pdの大きさが変更となる場合には、図示しない操作盤への指示操作により制御装置60からの指令で、アクチュエータ32を作動させることに伴い、容器胴部位置決め部材30を所定量前後進させ、位置設定をして、容器Pの胴部Pdの大きさ変更に対応することができ、また、アクチュエータ53を作動させることに伴い、案内ガイド51を所定量移動させ、容器Pの胴部Pdの容器搬送装置1の半径方向の当接位置を変更して、容器Pの胴部Pdの大きさ変更に対応することができる。
なお、図1において、案内ガイド51の図示実線は容器Pの場合のガイド位置を示し、図示二点鎖線は容器P1の場合のガイド位置を示している。
【0053】
さらに、容器Pの頭部の大きさ(キャップCの直径)が変更となる場合には、図示しない操作盤への指示操作により制御装置60からの指令で、図示しない移動機構を作動させ、スターホイール板41aとスターホイール板41bの2対重ね配置の所定量位置変更に伴って所定形状の溝41gを形成して、容器Pの頭部の大きさ変更に対応するとともに、図示しない移動機構を作動させ、頭部ガイド42を矢印H方向に所定量位置変更して容器Pの頭部の大きさ変更に対応することができる。
【0054】
なお、前記説明では、スターホイール41を取り付けた回転円板4を固定とし、容器把持装置10および容器底部受け板6を取り付けた回転円板5を上下機構8により上下動する場合を説明したが、容器把持装置10および容器底部受け板6を取り付けた回転円板5を固定とし、スターホイール41を取り付けた回転円板4を上下動するとしてもよく、回転円板4と回転円板5を相対的に上下動させる構成を、上流側および下流側の容器搬送機構に対応して選択すればよいことはもちろんである。
【0055】
また、図1、図3等では、容器Pの断面形状を丸形として示したが、丸形に限定することなく、容器Pの断面は角形等でもよい。また、図1、図5等ではキャップCの断面形状を丸形として示したが、丸形に限定することなく、多角形等としてもよい。
さらに、前記説明では、容器搬送装置1の上流側にキャップ巻き締め装置2を配置した場合を説明したが、上流側に回転式充填装置を配置する場合でもよく、本発明の容器搬送装置は上下流に各種の装置を配置した場合に適用することができる。
【符号の説明】
【0056】
1 (回転式)容器搬送装置
4 回転円板
5 回転円板
6 容器底部受け板
8 上下機構
10 容器把持装置
11、11a (一対の)グリッパ
12、12a ボス
13、13a ギヤ片
14 段差軸
14a 軸
17 引張りばね
20 カムフォロア
22 カム
30 容器胴部位置決め部材
32 アクチュエータ
40 容器頭部位置決め部材
41 スターホイール
41a、41b スターホイール板
42 頭部ガイド
50 案内ガイド装置
51 案内ガイド
53 アクチュエータ
60 制御装置
C、C1 キャップ
P、P1 容器
【技術分野】
【0001】
本発明は、円周等分に設けられた容器把持装置で容器を把持して搬送する回転式の容器搬送装置に関する。
【背景技術】
【0002】
従来、キャップ巻き締め装置等或いはその上下流側でPETボトル等の容器を搬送する回転式容器搬送装置においては、容器の口部を把持して搬送する容器把持装置を備えた回転式容器搬送装置が公知となっている。(特許文献1)
【0003】
近年、容器の大きさ、形状が多様化しており、多様化した容器の種類が変わっても、容器搬送装置の構成部品を交換することなく、構成部品の位置変更等のみで多種多様な大きさ、形状の容器に対応できる容器搬送装置提供の要求が高まりつつある。
また、容器を形成する材料節約の観点から容器が薄肉化の傾向にあり、薄肉容器の胴部のみを把持する場合には、容器を潰してしまう恐れがあるため、薄肉容器でも容器を確実に把持できるようにする容器搬送装置提供の要求が高まりつつある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−247413号公報(図4)
【発明の概要】
【発明が解決しようとする課題】
【0005】
前記特許文献1によれば、回転式容器搬送装置は、該搬送装置の搬送ピッチ円部に設けたネックリング保持機構によって容器口部のネックリングを保持(把持)して容器を搬送し、前記ネックリング保持機構で保持した容器口部とは別の容器口部箇所を保持して容器を受け取る容器受取り機構によって下流側の回転式中間搬送部への受渡しを行って、順次下流側へ受渡しながら容器を搬送するとしている。
【0006】
しかしながら、前記特許文献1の技術では、口部や胴部等の大きさが異なった容器を搬送する場合には、ネックリング保持機構又は容器受取り機構等の構成部品を交換して型替え対応をしなければならず、型替え部品の種類が増えてしまうと共に型替えに多大の時間を要するという恐れがあり、大きさ、形状が多様化した容器種類の変更に対して更なる工夫が要望されている。
【0007】
本発明は、このような事情を考慮して、多種多様な大きさ、形状の容器に対応しやすくするように、容器搬送時における容器の把持等に際して型替え部品の種類を増やさずに、型替え時間を短縮できる容器搬送装置を提供すること、および、薄肉容器でも容器を潰さずに確実に把持して搬送できる容器搬送装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
前記の課題に対し、本発明は以下の手段により解決を図る。
(1)第1の手段の容器搬送装置は、円周等分に設けられた容器把持装置で容器を把持して搬送する回転式の容器搬送装置において、前記容器の胴部を把持する一対の開閉式グリッパから成る容器把持装置と、前記容器の底部を受けて前記容器と共に回転する容器底部受け板と、前記容器頭部の位置決めをする容器頭部位置決め部材から構成されたことを特徴とする。
【0009】
(2)第2の手段の容器搬送装置は、前記第1の手段の容器搬送装置において、前記一対の開閉式グリッパを、前記容器の底部又は底部近辺で胴部を把持するように構成したことを特徴とする。
【0010】
(3)第3の手段の容器搬送装置は、前記第1および第2の手段の容器搬送装置において、前記容器を前記容器把持装置で把持する際に前記容器胴部に当接して該容器搬送装置の半径方向の位置決めをする容器胴部位置決め部材をさらに設けたことを特徴とする。
【0011】
(4)第4の手段の容器搬送装置は、前記第3の手段の容器搬送装置において、前記容器胴部位置決め部材に移動機構を設けて、前記容器胴部の大きさ、形状の変更に伴う位置決めの位置変更が部品交換を伴うことなく可能となるように構成したことを特徴とする。
【0012】
(5)第5の手段の容器搬送装置は、前記第1から第3の手段の容器搬送装置において、前記容器を上流側から該容器搬送装置へ、或いは、該容器搬送装置から下流側へ受渡しの際に、前記容器胴部の外周部をガイドしながら前記容器を前記容器把持装置の所定位置方向、或いは、下流側の所定位置方向へガイドする案内ガイドをさらに設けたことを特徴とする。
【0013】
(6)第6の手段の容器搬送装置は、前記第5の手段の容器搬送装置において、前記案内ガイドに移動機構を設けて、前記容器胴部の大きさ、形状の変更に伴う案内ガイド位置の変更が部品交換を伴うことなく可能となるように構成したことを特徴とする。
【0014】
(7)第7の手段の容器搬送装置は、前記第1の手段の容器搬送装置において、前記容器頭部位置決め部材を、前記容器把持装置と関連して円周等分に設けられ、前記容器頭部に当接する溝を有するスターホイールで構成したことを特徴とする。
【0015】
(8)第8の手段の容器搬送装置は、前記第7の手段の容器搬送装置において、前記スターホイールを、前記容器頭部に当接可能な溝を有するスターホイール板2対を重ねて相対的に所定量の位置ずれをさせて、前記2対を重ねた状態で前記溝の大きさ、形状が変更されることにより、前記容器頭部の大きさ、形状の変更に伴う位置決めの位置変更が部品交換を伴うことなく可能となるように構成したことを特徴とする。
【0016】
(9)第9の手段の容器搬送装置は、前記第7および第8の手段の容器搬送装置において、前記容器頭部位置決め部材に、前記容器の回転搬送による遠心力で前記容器頭部が外周側に逃げないように回転搬送の外周側で前記容器頭部をガイドして位置決めする頭部ガイドをさらに設けたことを特徴とする。
【0017】
(10)第10の手段の容器搬送装置は、前記第9の手段の容器搬送装置において、前記頭部ガイドに移動機構を設けて、前記容器頭部の大きさ、形状変更に伴う前記容器頭部位置決めの位置変更が部品交換を伴うことなく可能となるように構成したことを特徴とする。
【0018】
(11)第11の手段の容器搬送装置は、前記第1から第10の手段の容器搬送装置において、前記容器把持装置、前記容器底部受け板、前記容器頭部位置決め部材、前記容器胴部位置決め部材、前記案内ガイドの何れか一つ又は二つ以上が高さ方向の設定位置を変更できる昇降機構を備えて、該昇降機構による昇降によって容器高さの変更に対応できるように構成したことを特徴とする。
【0019】
(12)第12の手段の容器搬送装置は、前記第11の手段の容器搬送装置において、前記容器把持装置の高さ方向設定位置の変更に際して、前記一対の開閉式グリッパの開閉機構となるカムフォロアとカムの何れか一方の高さ方向の長さが、前記容器高さの変更範囲に対応できる長さを有するように構成したことを特徴とする。
【発明の効果】
【0020】
請求項1に係わる本発明は、円周等分に設けられた容器把持装置で容器を把持して搬送する回転式の容器搬送装置において、前記容器の胴部を把持する一対の開閉式グリッパから成る容器把持装置と、前記容器の底部を受けて前記容器と共に回転する容器底部受け板と、前記容器頭部の位置決めをする容器頭部位置決め部材から構成したことにより、前記容器が薄肉容器の場合でも容器を潰さずに確実に把持して回転搬送できるという効果、および、前記薄肉容器に液体が充填されていて液体入り容器の重量が大きくても容器底部受け板に受けられて容器形状が崩されることなく比較的弱い把持力で容器を回転搬送できるという効果を有する。
【0021】
請求項2に係わる本発明は、前記請求項1に記載する容器搬送装置において、前記一対の開閉式グリッパを、前記容器の底部又は底部近辺で胴部を把持するように構成したことにより、容器の底部又は底部近辺は比較的剛性が高いので、前記容器が薄肉容器の場合でも容器把持が確実にできるという効果を有する。
【0022】
請求項3に係わる本発明は、前記請求項1および2に記載する容器搬送装置において、前記容器を前記容器把持装置で把持する際に前記容器胴部に当接して該容器搬送装置の半径方向の位置決めをする容器胴部位置決め部材をさらに設けたことにより、前記容器を所定位置に確実に位置決めして前記容器把持装置で把持できるという効果を有する。
【0023】
請求項4に係わる本発明は、前記請求項3に記載する容器搬送装置において、前記容器胴部位置決め部材に移動機構を設ける構成としたことにより、前記容器胴部の大きさが変更となる場合においても位置決め部材を交換することなく短時間に対応できるという効果を有する。
【0024】
請求項5に係わる本発明は、前記請求項1から3に記載する容器搬送装置において、前記容器を上流側から該容器搬送装置へ、或いは、該容器搬送装置から下流側へ受渡しの際に、前記容器胴部の外周部をガイドしながら前記容器を前記容器把持装置の所定位置方向、或いは、下流側の所定位置方向へガイドする案内ガイドをさらに設けたことにより、前記受渡しの際に、容器の回転搬送方向が変わっても容器の位置ずれを生ずることなく、安定して受渡しができるという効果を有する。
【0025】
請求項6に係わる本発明は、前記請求項5に記載する容器搬送装置において、前記案内ガイドに移動機構を設ける構成としたことにより、前記容器胴部の大きさ、形状の変更に伴う案内ガイド位置の変更が部品交換を伴うことなく短時間で可能となるという効果を有する。
【0026】
請求項7に係わる本発明は、前記請求項1に記載する容器搬送装置において、前記容器頭部位置決め部材を、前記容器把持装置と関連して円周等分に設けられ、前記容器頭部に当接する溝を有するスターホイールで構成したことにより、容器胴部と容器頭部の軸心を一体にして容器搬送できるという効果を有する。
【0027】
請求項8に係わる本発明は、前記請求項7に記載する容器搬送装置において、前記スターホイールを、前記容器頭部に当接可能な溝を有するスターホイール板2対を重ねて相対的に所定量の位置ずれをさせて、前記2対を重ねた状態で前記溝の大きさ、形状が変更される構成としたことにより、前記容器頭部の大きさ、形状の変更に伴う位置決めの位置変更が部品交換を伴うことなく短時間で可能となるという効果を有する。
【0028】
請求項9に係わる本発明は、前記請求項7および8に記載する容器搬送装置において、前記容器頭部位置決め部材に、回転搬送の外周側で前記容器頭部をガイドして位置決めする頭部ガイドをさらに設けたことにより、前記容器の回転搬送による遠心力で前記容器頭部が外周側に逃げないようにすることができるという効果を有する。
【0029】
請求項10に係わる本発明は、前記請求項9に記載する容器搬送装置において、前記頭部ガイドに移動機構を設ける構成としたことにより、前記容器頭部の大きさ、形状変更に伴う前記容器頭部位置決めの位置変更が部品交換を伴うことなく可能となるという効果を有する。
【0030】
請求項11に係わる本発明は、前記請求項1から10に記載する容器搬送装置において、前記容器把持装置、前記容器底部受け板、前記容器頭部位置決め部材、前記容器胴部位置決め部材、前記案内ガイドの何れか一つ又は二つ以上が高さ方向の設定位置を変更できる昇降機構を備えた構成としたことにより、該昇降機構による昇降によって容器高さの変更に短時間で対応できるという効果を有する。
【0031】
請求項12に係わる本発明は、前記請求項11に記載する容器搬送装置において、前記容器把持装置の高さ方向設定位置の変更に際して、前記一対の開閉式グリッパの開閉機構となるカムフォロアとカムの何れか一方の高さ方向の長さが、前記容器高さの変更範囲に対応できる長さを有するように構成したことにより、前記容器高さの変更に際して、構成部品を交換することなく短時間で対応できるという効果を有する。
【図面の簡単な説明】
【0032】
【図1】本発明の実施の形態に係わる容器搬送装置を組み込んだ容器搬送ラインの一部を概念的に示す平面図であり、容器の図示が一部省略してある。
【図2】本発明の実施の形態に係わる容器搬送装置の正面断面図で、図1のA−A断面図に相当するものである。
【図3】図2のB−B断面図で、一部切断としてある。
【図4】図3の正面図である。
【図5】図2のD−D断面図で、図1に相当する図である。
【図6】図2のE−E断面図で、図5に相当する図であり、一部省略してある。
【図7】図6の記号41を説明する図である。
【図8】図7の記号41aを説明する図である。
【発明を実施するための形態】
【0033】
以下、この発明の実施の形態につき図面を参照しつつ詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。また、下記実施の形態における構成要素には、当業者が容易に想定できるもの、あるいは実質的に同一のものが含まれる。
【0034】
(本発明の実施の形態)
本発明の実施の形態を図1から図8に基づいて説明する。
図1は、本発明の実施の形態に係わる容器搬送装置を組み込んだ容器搬送ラインの一部を概念的に示す平面図であり、容器の図示が一部省略してある。
図2は、本発明の実施の形態に係わる容器搬送装置の正面断面図で、図1のA−A断面図に相当するものである。
図3は、図2のB−B断面図で、一部切断としてある。
図4は、図3の正面図である。
図5は、図2のD−D断面図で、図1に相当する図である。
図6は、図2のE−E断面図で、図5に相当する図であり、一部省略してある。
図7は、図6の記号41を説明する図である。
図8は、図7の記号41aを説明する図である。
【0035】
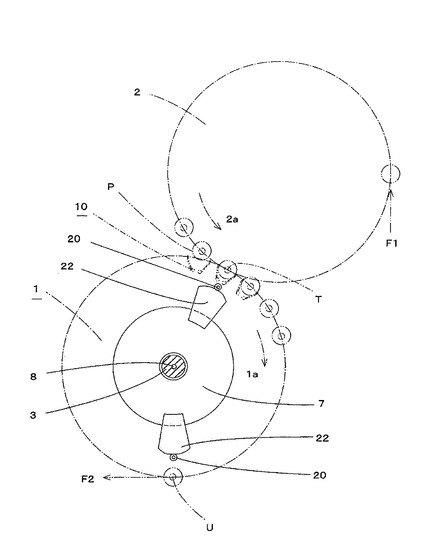
図1において、容器Pは、上流のF1方向からキャップ巻き締め装置2に供給され、該キャップ巻き締め装置2で矢印2a方向に回転搬送されている間に口部(頭部)にキャップCが被せられて巻き締められた後、図示T点で下流側の容器搬送装置1へ受け渡されるようになっている。
口部にキャップCを巻き締められた容器P(以下、キャップCを巻き締められた容器Pを単に容器P又はキャップCと称することがある。)の胴部Pdは、案内ガイド装置50にガイドされて容器搬送装置1の半径方向の内側へ所要量押し込まれながら、前記容器搬送装置1の後述する容器胴部位置決め部材30に位置決めされつつ容器把持装置10に把持されて矢印1a方向に回転搬送され、さらに図示U点で下流側のF2の方向へ搬出されていくようになっている。
【0036】
図2において、容器搬送装置1の回転中心O−Oに対して、図示左側は大きさ(容器胴部の直径、キャップCの直径、容器の高さ。以下同様。)が大きい容器Pの搬送状態を示し、図示右側は大きさが小さい容器P1の搬送状態を示しているが、容器Pは、底部近辺の胴部が図示しない駆動装置によって回転する回転軸3に上下方向摺動可能で該回転軸3とともに回転する回転円板5に取付けられた容器把持装置10によって把持され、底部が前記回転円板5に取付けられた容器底部受け板6によって載置され、また、容器Pの頭部のキャップCの外周部が容器頭部位置決め部材40に位置決めされて搬送されるように構成されていて、同様に、容器P1は、底部近辺の胴部が前記容器把持装置10によって把持され、底部が前記容器底部受け板6によって載置され、容器P1の頭部のキャップC1の外周部が容器頭部位置決め部材40に位置決めされて搬送されるように構成されている。
【0037】
前記回転円板5には上下機構8が取り付けられていて、該上下機構8が、図2に示すように、図示しない駆動装置により図示L方向に上下動される軸9を介して上下動されることによって、前記回転円板5が上下動されるようになっており、それに伴って前記容器Pと容器P1等の高さ変更に対応して前記容器把持装置10および前記容器底部受け板6が上下動されるようになっている。
【0038】
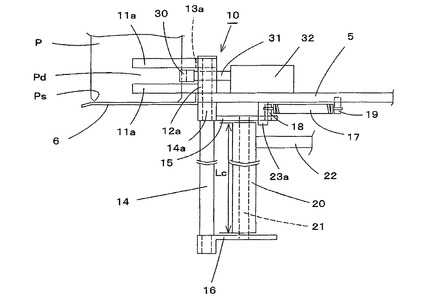
前記容器把持装置10の構成について、図2、図3、図4を基に更に詳しく説明すると、容器Pの底部Ps近辺の胴部Pdを把持する一対のグリッパ11およびグリッパ11aは、それぞれ段差軸14および軸14aとともに揺動回転するボス12およびボス12aと一体になっており、該ボス12およびボス12aに取付けられたギヤ片13およびギヤ片13aが互いに噛合って揺動することによって、図示実線と二点鎖線で示すように、β方向に開閉するようになっている。
なお、前記段差軸14および軸14aはそれぞれ前記回転円板5に設けられた穴に回転摺動するとともに、上下方向の位置設定がされるようになっている。さらに前記段差軸14の他端には支持レバー16が取り付けられている。
【0039】
また、前記ボス12にはレバー15が一体に設けられていて、該レバー15の他端に取付けられたピン18と前記回転円板5に取付けられたピン19に引張りばね17が懸架されている。
さらに、前記レバー15と前記支持レバー16の所定位置に取付けられた軸21の周りに回転するカムフォロア20が設けられていて、該カムフォロア20は図示しないフレームに固定された固定円板7に取付けられたカム22と係合するようになっていて、該カム22のカム軌跡によって前記レバー15が前記段差軸14の中心を支点として揺動回転するようになっている。
なお、前記カムフォロア20の長さLcは、前記容器把持装置10即ち前記回転円板5の前記上下動範囲に対応できるような長さとなっている。
また、前記レバー15は、前記回転円板5に取付けられたストッパ23或いはストッパ23aに当接することにより、前記グリッパ11とグリッパ11aが所定量以上それぞれ閉じないように或いは開かないように規制される構成となっている。
【0040】
前記説明のような容器把持装置10の構成により、容器Pは底部Ps近辺の胴部Pdが一対のグリッパ11およびグリッパ11aの閉作動によって把持されるようになっており、前記一対のグリッパ11およびグリッパ11aは容器把持部形状並びに開閉範囲が、予め設定された容器Pの胴部Pdの大きさの最大から最小まで対応できるようになっている。
なお、前記容器底部受け板6は、図3では各容器把持装置10に対応して個々に設けられた場合を示しているが、容器搬送装置1の全ての容器把持装置10に共通の円板状(リング状)のものとしてもよく、容器の底部が容器底部受け板とともに回転搬送されるものであればよい。
【0041】
また、容器Pの胴部Pdは、容器胴部位置決め部材30に当接することよって容器搬送装置1の半径方向に位置決めされるようになっているが、該容器胴部位置決め部材30が回転円板5に固定されたアクチュエータ32の作動によってロッド31を介して所定量前後進することによって、容器Pの胴部Pdの大きさ変更に対応できるように移動機構が構成されている。
【0042】
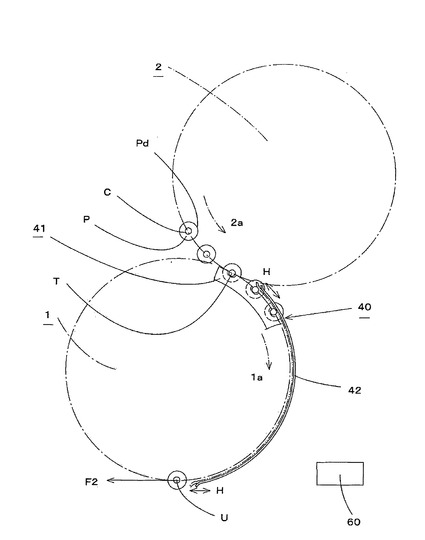
前記頭部位置決め部材40は、前記回転軸3に固定の回転円板4に取付けられたスターホイール41と、キャップCを回転搬送の外周側でガイドしてキャップCが回転搬送による遠心力で外周側へ逃げないように位置決めする図示しない支持装置に支持された頭部ガイド42により構成されている。
【0043】
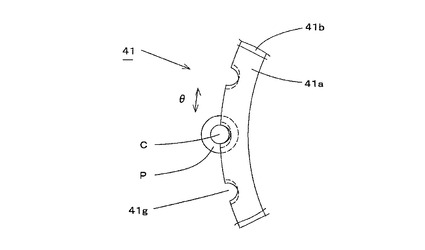
前記スターホイール41について、図7および図8を基に説明すると、スターホイール41は、スターホイール板41aとスターホイール板41bの2対重ねで構成されている。前記スターホイール板41aは、図8に示すように、外周部に溝41v(図示では円弧形)が前記容器把持装置10の取付け円周ピッチと関連した円周ピッチで設けられていて、前記スターホイール板41bも前記スターホイール板41aと同様の形状となっており、前記スターホイール板41aと前記スターホイール板41bが2対重ねとなって形成する溝41gにキャップCの外周部が当接して、キャップCが容器搬送装置1の半径方向および円周方向に位置決めされるようになっている。
【0044】
前記溝41gは、図7に示すように、θ方向に前記スターホイール板41aとスターホイール板41bの互いの配置を位置変更することによって、キャップCの大きさ、形状の変更に対応できるように構成されているが、前記スターホイール板41aと前記スターホイール板41bの2対重ね配置の位置変更は図示しない移動機構によって行われるようになっている。
なお、前記説明では、溝41vを円弧形の形状として説明したが、U字形或いはV字形等としてもよく、キャップCの大きさ、形状変更に対応できる形状であればよい。
【0045】
また、前記頭部ガイド42は、図6に示すように、該容器搬送装置1の円周方向の所定範囲で円弧形の形状をしており、その両端が図示しない移動機構によって図示矢印H方向に移動することにより、図示二点鎖線で示す位置と図示実線で示す位置のように、回転搬送される容器Pの頭部(キャップC)の大きさに対応して、ガイド位置を変更できるようになっている。
【0046】
なお、前記案内ガイド装置50は、図1に示すように、容器Pの胴部Pdを案内ガイド51によってガイドして、容器Pを容器搬送装置1の半径方向の内側へ所要量押し込もうとするようになっているが、前記案内ガイド51は、図示しないフレームに取付けられたアクチュエータ53の作動によって矢印50aの方向に前後進するロッド52によって、容器Pの胴部Pdの大きさ変更に対応して前記押し込み所要量を変更できるように移動機構が構成されている。
【0047】
前記説明の容器底部受け板6の図示しない上下駆動装置による上下動、容器胴部位置決め部材30のアクチュエータ32による前後進、スターホイール40の前記スターホイール板41aとスターホイール板41bの図示しない移動機構による2対重ね配置位置の変更、前記頭部ガイド42の矢印H方向の移動、案内ガイド51のアクチュエータ53による前後進は、図示しない操作盤への指示操作により制御装置60からの指令で自動的に行うことができるようになっているが、手動で行うこととしてもよい。
【0048】
次に、本発明の実施の形態に係わる容器搬送装置1の作用を説明する。
容器Pは、キャップ巻き締め装置2で回転搬送中にその頭部にキャップCが被せられて巻き締められた後、T点近辺に搬送されてくると、容器Pの底部Psが容器底部受け板6に載置されながら、容器把持装置10のグリッパ11およびグリッパ11aが、引張りばね17の引張り作用に抗してカム22とカムフォロア20の係合軌跡により所要量開いて、底部Ps近辺の胴部Pdが把持されるようになるが、前記容器把持装置10による容器Pの把持の際、容器Pの胴部Pdが案内ガイド51にガイドされて容器搬送装置1の半径方向の内側へ所要量押し込まれようとするとともに、位置決め部材30に当接して容器搬送装置1の半径方向の位置決めがなされて、前記引張りばね17の引張り作用並びにカム22とカムフォロア20の係合軌跡によりグリッパ11およびグリッパ11aが閉じて容器Pの胴部Pdが把持され、また、容器Pの頭部のキャップCの外周部がスターホイール41の溝41gへの当接および頭部ガイド42によるガイドで、容器Pの頭部が容器搬送装置1の半径方向並びに円周方向の位置決めをされて、容器Pは矢印1aの方向に回転搬送される。
【0049】
前記説明のように容器Pの胴部PdおよびキャップCが位置決めされて、容器把持装置10により容器Pの底部Ps近辺の胴部Pdが把持され、容器底部受け板6に載置された容器Pは、矢印1aの方向に回転搬送されて図示U点近辺に達すると、容器把持装置10のグリッパ11およびグリッパ11aが引張りばね17の引張り作用に抗してカム22とカムフォロア20の係合軌跡により所要量開いて、下流側のF2方向へ受け渡され、搬送されていく。
【0050】
なお、前記容器把持装置10のグリッパ11およびグリッパ11aが容器Pの底部Ps近辺の胴部Pdを把持することにより、容器Pの底部Ps或いは底部Ps近辺が一般的に容器Pの高さ方向中央部の胴部Pdと比較して高剛性であるので、薄肉容器の場合でも容器Pを確実に把持することができ、さらに、容器Pの底部Psが容器底部受け板6に載置されているので、容器P内に液体が充填されて容器Pの重量が大きくなっても重力の作用で容器Pの形状が崩れることはなく、また前記グリッパ11およびグリッパ11aの容器Pの把持力が比較的弱くても安定して容器Pを回転搬送することができる。
【0051】
容器Pの高さが変更となる場合は、図示しない操作盤への指示操作により制御装置60からの指令で、図示しない駆動装置によって上下機構8が上下動されることに伴い、回転円板5の上下動を介して前記容器把持装置10および前記容器底部受け板6が上下動して、容器Pの高さ変更に対応することができる。
この場合において、カムフォロア20が高さ方向に所要長さLcを有する構成としてあるので、前記容器把持装置10が上下動しても、そのまま前記カムフォロア20と前記カム22との係合が適切に行われ、部品交換を伴うことなくグリッパ11およびグリッパ11aの開閉が適切に行われる。
【0052】
また、容器Pの胴部Pdの大きさが変更となる場合には、図示しない操作盤への指示操作により制御装置60からの指令で、アクチュエータ32を作動させることに伴い、容器胴部位置決め部材30を所定量前後進させ、位置設定をして、容器Pの胴部Pdの大きさ変更に対応することができ、また、アクチュエータ53を作動させることに伴い、案内ガイド51を所定量移動させ、容器Pの胴部Pdの容器搬送装置1の半径方向の当接位置を変更して、容器Pの胴部Pdの大きさ変更に対応することができる。
なお、図1において、案内ガイド51の図示実線は容器Pの場合のガイド位置を示し、図示二点鎖線は容器P1の場合のガイド位置を示している。
【0053】
さらに、容器Pの頭部の大きさ(キャップCの直径)が変更となる場合には、図示しない操作盤への指示操作により制御装置60からの指令で、図示しない移動機構を作動させ、スターホイール板41aとスターホイール板41bの2対重ね配置の所定量位置変更に伴って所定形状の溝41gを形成して、容器Pの頭部の大きさ変更に対応するとともに、図示しない移動機構を作動させ、頭部ガイド42を矢印H方向に所定量位置変更して容器Pの頭部の大きさ変更に対応することができる。
【0054】
なお、前記説明では、スターホイール41を取り付けた回転円板4を固定とし、容器把持装置10および容器底部受け板6を取り付けた回転円板5を上下機構8により上下動する場合を説明したが、容器把持装置10および容器底部受け板6を取り付けた回転円板5を固定とし、スターホイール41を取り付けた回転円板4を上下動するとしてもよく、回転円板4と回転円板5を相対的に上下動させる構成を、上流側および下流側の容器搬送機構に対応して選択すればよいことはもちろんである。
【0055】
また、図1、図3等では、容器Pの断面形状を丸形として示したが、丸形に限定することなく、容器Pの断面は角形等でもよい。また、図1、図5等ではキャップCの断面形状を丸形として示したが、丸形に限定することなく、多角形等としてもよい。
さらに、前記説明では、容器搬送装置1の上流側にキャップ巻き締め装置2を配置した場合を説明したが、上流側に回転式充填装置を配置する場合でもよく、本発明の容器搬送装置は上下流に各種の装置を配置した場合に適用することができる。
【符号の説明】
【0056】
1 (回転式)容器搬送装置
4 回転円板
5 回転円板
6 容器底部受け板
8 上下機構
10 容器把持装置
11、11a (一対の)グリッパ
12、12a ボス
13、13a ギヤ片
14 段差軸
14a 軸
17 引張りばね
20 カムフォロア
22 カム
30 容器胴部位置決め部材
32 アクチュエータ
40 容器頭部位置決め部材
41 スターホイール
41a、41b スターホイール板
42 頭部ガイド
50 案内ガイド装置
51 案内ガイド
53 アクチュエータ
60 制御装置
C、C1 キャップ
P、P1 容器
【特許請求の範囲】
【請求項1】
円周等分に設けられた容器把持装置で容器を把持して搬送する回転式の容器搬送装置において、前記容器の胴部を把持する一対の開閉式グリッパから成る容器把持装置と、前記容器の底部を受けて前記容器と共に回転する容器底部受け板と、前記容器頭部の位置決めをする容器頭部位置決め部材から構成されたことを特徴とする容器搬送装置。
【請求項2】
請求項1に記載する容器搬送装置において、前記一対の開閉式グリッパを、前記容器の底部又は底部近辺で胴部を把持するように構成したことを特徴とする容器搬送装置。
【請求項3】
請求項1又は2に記載する容器搬送装置において、前記容器を前記容器把持装置で把持する際に前記容器胴部に当接して該容器搬送装置の半径方向の位置決めをする容器胴部位置決め部材をさらに設けたことを特徴とする容器搬送装置。
【請求項4】
請求項3に記載する容器搬送装置において、前記容器胴部位置決め部材に移動機構を設けて、前記容器胴部の大きさ、形状の変更に伴う位置決めの位置変更が部品交換を伴うことなく可能となるように構成したことを特徴とする容器搬送装置。
【請求項5】
請求項1から3のいずれか一項に記載する容器搬送装置において、前記容器を上流側から該容器搬送装置へ、或いは、該容器搬送装置から下流側へ受渡しの際に、前記容器胴部の外周部をガイドしながら前記容器を前記容器把持装置の所定位置方向、或いは、下流側の所定位置方向へガイドする案内ガイドをさらに設けたことを特徴とする容器搬送装置。
【請求項6】
請求項5に記載する容器搬送装置において、前記案内ガイドに移動機構を設けて、前記容器胴部の大きさ、形状の変更に伴う案内ガイド位置の変更が部品交換を伴うことなく可能となるように構成したことを特徴とする容器搬送装置。
【請求項7】
請求項1に記載する容器搬送装置において、前記容器頭部位置決め部材を、前記容器把持装置と関連して円周等分に設けられ、前記容器頭部に当接する溝を有するスターホイールで構成したことを特徴とする容器搬送装置。
【請求項8】
請求項7に記載する容器搬送装置において、前記スターホイールを、前記容器頭部に当接可能な溝を有するスターホイール板2対を重ねて相対的に所定量の位置ずれをさせて、前記2対を重ねた状態で前記溝の大きさ、形状が変更されることにより、前記容器頭部の大きさ、形状の変更に伴う位置決めの位置変更が部品交換を伴うことなく可能となるように構成したことを特徴とする容器搬送装置。
【請求項9】
請求項7又は8に記載する容器搬送装置において、前記容器頭部位置決め部材に、前記容器の回転搬送による遠心力で前記容器頭部が外周側に逃げないように回転搬送の外周側で前記容器頭部をガイドして位置決めする頭部ガイドをさらに設けたことを特徴とする容器搬送装置。
【請求項10】
請求項9に記載する容器搬送装置において、前記頭部ガイドに移動機構を設けて、前記容器頭部の大きさ、形状変更に伴う前記容器頭部位置決めの位置変更が部品交換を伴うことなく可能となるように構成したことを特徴とする容器搬送装置。
【請求項11】
請求項1から10のいずれか一項に記載する容器搬送装置において、前記容器把持装置、前記容器底部受け板、前記容器頭部位置決め部材、前記容器胴部位置決め部材、前記案内ガイドの何れか一つ又は二つ以上が高さ方向の設定位置を変更できる昇降機構を備えて、該昇降機構による昇降によって容器高さの変更に対応できるように構成したことを特徴とする容器搬送装置。
【請求項12】
請求項11に記載する容器搬送装置において、前記容器把持装置の高さ方向設定位置の変更に際して、前記一対の開閉式グリッパの開閉機構となるカムフォロアとカムの何れか一方の高さ方向の長さが、前記容器高さの変更範囲に対応できる長さを有するように構成したことを特徴とする容器搬送装置。
【請求項1】
円周等分に設けられた容器把持装置で容器を把持して搬送する回転式の容器搬送装置において、前記容器の胴部を把持する一対の開閉式グリッパから成る容器把持装置と、前記容器の底部を受けて前記容器と共に回転する容器底部受け板と、前記容器頭部の位置決めをする容器頭部位置決め部材から構成されたことを特徴とする容器搬送装置。
【請求項2】
請求項1に記載する容器搬送装置において、前記一対の開閉式グリッパを、前記容器の底部又は底部近辺で胴部を把持するように構成したことを特徴とする容器搬送装置。
【請求項3】
請求項1又は2に記載する容器搬送装置において、前記容器を前記容器把持装置で把持する際に前記容器胴部に当接して該容器搬送装置の半径方向の位置決めをする容器胴部位置決め部材をさらに設けたことを特徴とする容器搬送装置。
【請求項4】
請求項3に記載する容器搬送装置において、前記容器胴部位置決め部材に移動機構を設けて、前記容器胴部の大きさ、形状の変更に伴う位置決めの位置変更が部品交換を伴うことなく可能となるように構成したことを特徴とする容器搬送装置。
【請求項5】
請求項1から3のいずれか一項に記載する容器搬送装置において、前記容器を上流側から該容器搬送装置へ、或いは、該容器搬送装置から下流側へ受渡しの際に、前記容器胴部の外周部をガイドしながら前記容器を前記容器把持装置の所定位置方向、或いは、下流側の所定位置方向へガイドする案内ガイドをさらに設けたことを特徴とする容器搬送装置。
【請求項6】
請求項5に記載する容器搬送装置において、前記案内ガイドに移動機構を設けて、前記容器胴部の大きさ、形状の変更に伴う案内ガイド位置の変更が部品交換を伴うことなく可能となるように構成したことを特徴とする容器搬送装置。
【請求項7】
請求項1に記載する容器搬送装置において、前記容器頭部位置決め部材を、前記容器把持装置と関連して円周等分に設けられ、前記容器頭部に当接する溝を有するスターホイールで構成したことを特徴とする容器搬送装置。
【請求項8】
請求項7に記載する容器搬送装置において、前記スターホイールを、前記容器頭部に当接可能な溝を有するスターホイール板2対を重ねて相対的に所定量の位置ずれをさせて、前記2対を重ねた状態で前記溝の大きさ、形状が変更されることにより、前記容器頭部の大きさ、形状の変更に伴う位置決めの位置変更が部品交換を伴うことなく可能となるように構成したことを特徴とする容器搬送装置。
【請求項9】
請求項7又は8に記載する容器搬送装置において、前記容器頭部位置決め部材に、前記容器の回転搬送による遠心力で前記容器頭部が外周側に逃げないように回転搬送の外周側で前記容器頭部をガイドして位置決めする頭部ガイドをさらに設けたことを特徴とする容器搬送装置。
【請求項10】
請求項9に記載する容器搬送装置において、前記頭部ガイドに移動機構を設けて、前記容器頭部の大きさ、形状変更に伴う前記容器頭部位置決めの位置変更が部品交換を伴うことなく可能となるように構成したことを特徴とする容器搬送装置。
【請求項11】
請求項1から10のいずれか一項に記載する容器搬送装置において、前記容器把持装置、前記容器底部受け板、前記容器頭部位置決め部材、前記容器胴部位置決め部材、前記案内ガイドの何れか一つ又は二つ以上が高さ方向の設定位置を変更できる昇降機構を備えて、該昇降機構による昇降によって容器高さの変更に対応できるように構成したことを特徴とする容器搬送装置。
【請求項12】
請求項11に記載する容器搬送装置において、前記容器把持装置の高さ方向設定位置の変更に際して、前記一対の開閉式グリッパの開閉機構となるカムフォロアとカムの何れか一方の高さ方向の長さが、前記容器高さの変更範囲に対応できる長さを有するように構成したことを特徴とする容器搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−240769(P2012−240769A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−110333(P2011−110333)
【出願日】平成23年5月17日(2011.5.17)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月17日(2011.5.17)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【Fターム(参考)】
[ Back to top ]