
容器搬送装置
【課題】容器6の首部を把持して複数の回転手段間を順次受け渡して搬送する容器搬送装置で、小型容器6Aと大型容器6Bに兼用できるように、搬送中に容器6の搬送間隔を変更する。
【解決手段】48πピッチでグリッパ26が配置された搬入搬送ホイール22と、30πピッチでグリッパ60が配置された搬出搬送ホイール58の間に、48πピッチから30πピッチに容器6の搬送間隔を変更する縮小搬送手段(第1変換ホイール30)と、48πピッチから60πピッチに容器6の搬送間隔を拡大する拡大搬送手段(第2変換ホイール32)とを並列に配置し、搬入搬送ホイール22によって搬送されてきた容器6を、切換カム38によって縮小搬送手段30と拡大搬送手段32のいずれかに振り分けて受け渡す。
【解決手段】48πピッチでグリッパ26が配置された搬入搬送ホイール22と、30πピッチでグリッパ60が配置された搬出搬送ホイール58の間に、48πピッチから30πピッチに容器6の搬送間隔を変更する縮小搬送手段(第1変換ホイール30)と、48πピッチから60πピッチに容器6の搬送間隔を拡大する拡大搬送手段(第2変換ホイール32)とを並列に配置し、搬入搬送ホイール22によって搬送されてきた容器6を、切換カム38によって縮小搬送手段30と拡大搬送手段32のいずれかに振り分けて受け渡す。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、容器の首部を把持して吊り下げた状態で、回転ホイール間を受け渡して搬送する容器搬送装置に係り、特に、大型容器と小型容器に兼用可能な容器搬送装置に関するものである。
【背景技術】
【0002】
例えば、同一の充填機で大型容器と小型容器を兼用するために、小型容器に合わせて充填ノズルを配置し、大型容器の場合には、小型容器の倍のピッチで容器を供給して、各充填ノズルに対して一つおきに大型容器を位置させて充填を行うようにした充填装置が従来から知られている(特許文献1参照)。
【0003】
また、PETボトルに連続的に充填を行う充填ラインとして、ブロー成形から充填までを行うように構成したものがすでに知られている(特許文献2参照)。この特許文献2に記載された発明では、充填機はブロー成形されたPETボトルの首部を把持するグリッパを備えており、各グリッパによって容器を吊り下げた状態で搬送しつつ充填を行うようになっており、PETボトルを成形するブロー成形機から充填機までは、グリッパを備えた複数のホイールによるネックハンドリングによって受け渡しを行うようになっている。
【0004】
前記のような充填ラインにおいて、特許文献1の発明と同様に小型容器と大型容器を兼用させるために、充填機に小型容器の倍のピッチで大型容器を供給するようにするには、グリッパホイルにおいてPETボトルの搬送ピッチを変更する必要がある。通常ブロー成形機と充填機ではグリッパの間隔が異なっており、このような場合に間隔変更ホイールを介して搬送ピッチを変換させることが知られている(特許文献3参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特公平3−14720号公報
【特許文献2】特開2010−241577号公報
【特許文献3】特開2008−100845号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
前記特許文献3のように間隔変更ホイールを用いた場合であっても、小型容器と大型容器に兼用する際に、必要に応じて間隔の変更を行うことはできず、間隔変更ホイールを交換する必要性が生じるという問題があった。
【課題を解決するための手段】
【0007】
本発明は、前記課題を解決するためになされたもので、内容液を収容する胴部とこの胴部よりも細い首部を有する容器を、首部を把持した吊り下げ状態で搬送する容器搬送装置であって、首部を把持するグリッパを円周方向等間隔に配置した回転搬送手段を複数備え、異なる回転搬送手段間で容器を受け渡して搬送し、搬送する間に容器の搬送間隔を変更する容器搬送装置において、前記複数の回転搬送手段は、上流側から容器が搬入される搬入搬送手段と、下流側へ容器を搬出する搬出搬送手段と、これら搬入搬送手段と搬出搬送手段の間に設けられて容器の搬送間隔を変更する間隔変更搬送手段とからなり、前記搬入搬送手段のグリッパの配置間隔が、前記搬出搬送手段のグリッパの配置間隔以上、かつ、前記搬出搬送手段のグリッパの配置間隔の2倍以下であって、前記間隔変更手段は、前記搬出搬送手段のグリッパの配置間隔の2倍の間隔で搬出搬送手段に容器を受け渡す倍間隔手段と、前記搬出搬送手段のグリッパの配置間隔と等しい間隔で搬出搬送手段に容器を受け渡す等間隔手段とを備え、これら倍間隔手段と等間隔手段の使用を切り換える切換手段を設けたことを特徴とするものである。
【0008】
また、第2の発明は、前記第1の発明において、前記搬入搬送手段の上流側に配置されて、前記搬出搬送手段のグリッパの配置間隔の2倍の間隔よりも大きな間隔から搬入搬送手段の配置間隔まで、容器の搬送間隔を縮小させる搬入側縮小搬送手段を備えたことを特徴とするものである。
【0009】
さらに、第3の発明は、前記第1の発明または第2の発明において、前記倍間隔手段と等間隔手段が異なる回転搬送手段から構成され、前記切換手段は前記搬入搬送手段に設けられて、これら異なる回転搬送手段への容器の受け渡しを切り換えることを特徴とするものである。
【0010】
また、第4の発明は、前記第1の発明または第2の発明において、前記倍間隔手段と等間隔手段が単一の回転搬送手段に設けられたカムより構成され、前記切換手段はこの回転搬送手段に設けられて、これらカムの使用を切り換えることを特徴とするものである。
【発明の効果】
【0011】
本発明の容器搬送装置は、グリッパを円周方向等間隔に配置した搬入搬送手段と搬出搬送手段との間に間隔変更搬送手段を設け、搬入搬送手段のグリッパの配置間隔が、前記搬出搬送手段のグリッパの配置間隔以上、かつ、前記搬出搬送手段のグリッパの配置間隔の2倍以下であって、前記間隔変更手段は、前記搬出搬送手段のグリッパの配置間隔の2倍の間隔で搬出搬送手段に容器を受け渡す倍間隔手段と、前記搬出搬送手段のグリッパの配置間隔と等しい間隔で搬出搬送手段に容器を受け渡す等間隔手段とを備える構成とし、切換手段によって、これら倍間隔手段と等間隔手段の使用を切り換えるようにしたので、ホイール等の交換をすることなく、容器搬送装置を大型容器と小型容器に兼用させることが可能になるという利点がある。
【図面の簡単な説明】
【0012】
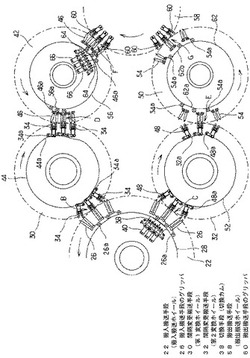
【図1】図1は容器搬送装置の全体の配置を示す平面図である。(実施例1)
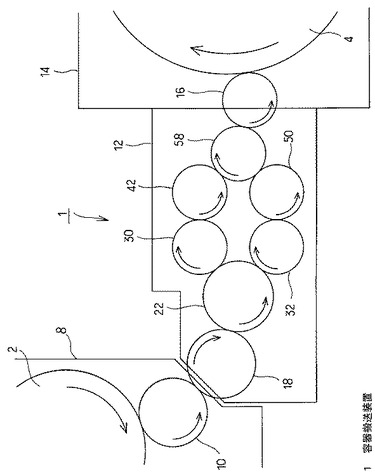
【図2】図2は搬入搬送手段と間隔変更搬送手段との受け渡しを行う部分の構成を示す平面図である。
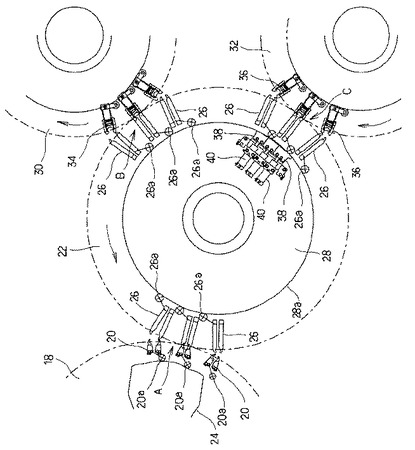
【図3】図3は各回転搬送手段の構成を示す平面図である。
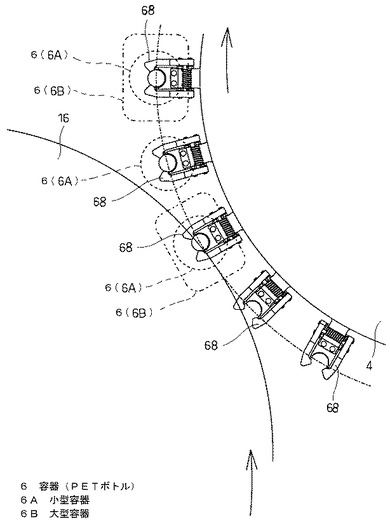
【図4】図4は充填機への容器供給部の構成を示す平面図である。
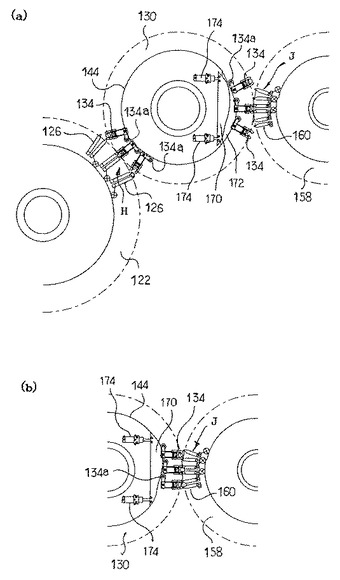
【図5】図5は変換ホイールから搬出搬送ホイールへの受け渡しを行う部分の構成を示す平面図であり、図(a)は搬送ピッチの拡大時を、図(b)は搬送ピッチの縮小時を示す(実施例2)
【発明を実施するための形態】
【0013】
ブロー成型機によって成形され、充填機によって液体が充填されるPETボトル等の容器の首部を把持して吊り下げた状態で、前記ブロー成型機から充填機へ搬送する容器搬送装置であり、容器の首部を把持するグリッパが円周方向等間隔に配置され、上流側から容器が搬入される搬入搬送手段と、グリッパが円周方向等間隔に配置され、下流側へ容器を搬出する搬出搬送手段と、これら搬入搬送手段と搬出搬送手段との間に配置され、容器の搬送間隔を変更する間隔変更搬送手段とを備えており、搬入搬送手段のグリッパの配置間隔が、搬出搬送手段のグリッパの配置間隔よりも大きく、かつ搬送間隔の2倍よりも小さくなるように構成され、さらに、間隔変更搬送手段に、搬入搬送手段から受け取った容器の搬送間隔(例えば48πピッチ)を、搬出搬送手段のグリッパ配置間隔(例えば30πピッチ)の2倍(60πピッチ)に拡大する拡大搬送手段と、搬出搬送手段のグリッパの配置間隔と等しい間隔(30πピッチ)に縮小させる縮小搬送手段の2つの搬送手段を設け、切換カム等の切換手段によって、搬入搬送手段により搬送されてきた容器を、前記拡大搬送手段と縮小搬送手段のいずれかに受け渡すようにするという構成で、回転搬送手段によって搬送している間に容器の搬送間隔を変更することにより異なるサイズの容器に兼用することを可能にするという目的を達成する。なお、グリッパの配置間隔(ピッチ)は、グリッパが移動する回転円周の長さをグリッパの数で割ることで求めることができ、例えば、回転円周の直径が960mmでグリッパ数が32であれば、960π(円周)/32=30π(mmピッチ)として表すことができる。
【実施例1】
【0014】
以下、図面に示す実施例により本発明を説明する。この容器搬送装置(全体として符号1で示す)は、上流側のブロー成形機2と下流側の充填機4の間に配置され、ブロー成形機2から搬出された際の容器6の搬送ピッチを変換して充填機4に供給する。特に、この実施例に係る装置では、小型容器6Aと大型容器6Bに兼用するために、搬送ピッチを小型容器6A用のピッチと大型容器6B用のピッチに変更できるようになっている。なお、この明細書では、小型容器を符号6Aで、また大型容器を符号6Bで示す(図4参照)。この実施例に係る容器搬送装置1に適用される容器6は、詳細な形状は図示しないが、内容液を収容する胴部と、この胴部よりも細い首部を有するPETボトルであり、首部に形成されたフランジの上部または下部を把持し、または保持して吊り下げた状態で搬送する。小型容器6Aと大型容器6Bでは、容器の首部の径は変わらないものの、胴部の外形寸法は大きく異なっている。
【0015】
図1に示す第1チャンバー8内にブロー成型機2が配置されており、供給されたパリソンをブロー成形によりPETボトル6に成形した後、搬出ホイール10を介して前記容器搬送装置1に搬入する。この実施例では、ブロー成型機2では、PETボトル6を100πピッチで搬送するようになっており、その後、搬出ホイール10において容器6の搬送間隔を100πピッチからこれよりも小さな48πピッチにピッチ変換を行った後、容器搬送装置1に搬入する。この搬出ホイール10は、後述する第1変換ホイール30と同様に構成され、請求項に記載した搬入側縮小搬送手段を構成している。
【0016】
第2チャンバー12内に設置された容器搬送装置1では、48πピッチの搬送間隔で搬入されたPETボトル6を、30πピッチの搬送間隔に変換し、または60πピッチの搬送間隔に変換した後、充填機4に供給する。充填機4は、第2チャンバー12の下流側に連結された第3チャンバー14内に配置されており、前記容器搬送装置1から、大型容器6Bの場合には30πピッチで、また、小型容器6Aの場合には60πピッチで供給ホイール16が受け取ったPETボトル6が供給される。
【0017】
容器供給装置1の入口側に配置された受け渡しホイール18は、図2に示すように、外周部に円周方向等間隔で複数のグリッパ20が設けられている。この受け渡しホイール18では、グリッパ20は48πピッチで配置されており、各グリッパ20にPETボトル6が保持されて搬送される。この受け渡しホイール18から次の搬入搬送手段である搬入搬送ホイール22への受け渡し位置Aにグリッパ開閉カム24が配置されている。グリッパ20の一方のアームの後端に取り付けたカムフォロア20aがこのグリッパ開閉カム24に係合して移動しており、受け渡しホイール18のグリッパ20から搬入搬送ホイール22のグリッパ26へPETボトル6の受け渡しを行う際に、このグリッパ20の開放を行う。
【0018】
次の搬入搬送ホイール22は、外周部に円周方向等間隔で複数のグリッパ26が設けられている。この実施例では、各グリッパ26は48πピッチで配置されている。この搬入搬送ホイール22の、グリッパ26が配置されている位置の内周側に円形のグリッパ開閉カム28が固定されている。各グリッパ26の一方のアームの後端にカムフォロア26aが取り付けられ、前記グリッパ開閉カム28の外周カム面28aに常時係合している。この搬入搬送ホイール22は、上流側の前記受け渡しホイール18からPETボトル6を受け取り、下流側の2箇所のピッチ変換ホイール(第1変換ホイール30と第2変換ホイール32)の何れか一方にそのPETボトル6を引き渡すようになっており、前記グリッパ開閉カム28の、前記上流側からの受け渡し位置Aと2箇所の下流側への受け渡し位置B、Cに、それぞれ開放用の凹部が形成されている。前記第1変換ホイール30と第2変換ホイール32が、請求項1に記載した間隔変更搬送手段を構成している。
【0019】
搬入搬送ホイール22には、48πピッチでグリッパ26が設けられており、その下流側に配置され、48πピッチでグリッパ34が設けられている第1変換ホイール30と、同じく48πピッチでグリッパ36が設けられている第2変換ホイール32のいずれかのグリッパ34、36へPETボトル6を受け渡す。この実施例では、搬入搬送ホイール22は図の反時計回り方向に回転しており(図1〜図3の矢印参照)、PETボトル6を各グリッパ26に保持して回転してきた搬入搬送ホイール22から第2変換ホイール32のグリッパ36に引き渡す場合には、そのまま受け渡し位置Cでグリッパ26を開閉させて受け渡しを行う。また、搬入搬送ホイール22のグリッパ26から第1変換ホイール30のグリッパ34にPETボトル6を引き渡す場合には、搬入搬送ホイール22のグリッパ26がPETボトル6を保持した状態で第2変換ホイール32への受け渡し位置Cを通過しなければならない。そこで、搬入搬送ホイール22の、第2変換ホイール32への受け渡し位置Cに、切換手段(切換カム)38が設置されている。この切換カム38は、エアシリンダ40によって進退動できる可動カムであり、後退時には先端カム面が前記円形のグリッパ開閉カム28のカム面28aよりも内側に位置して、グリッパ26全体の方向に影響を与えないようになっている。また、切換カム38がエアシリンダ40の作動によって前進したときには、カムフォロア26aを半径方向外方へ押し出すことによりグリッパ26を閉じた状態のまま第2変換ホイール32への受け渡し位置Cを通過させて、次の第1変換ホイール30への受け渡し位置でPETボトル6の受け渡しを行う。
【0020】
第1変換ホイール30は、その外周部に円周方向等間隔で複数のグリッパ34が設けられている。この第1変換ホイール30のグリッパ34も48πピッチで配置されており、搬入搬送ホイール22のグリッパ26からそのままPETボトル6を引き渡される。前記搬入搬送ホイール22のグリッパ26は、開閉してPETボトル6の首部を把持するグリッパであるが、この第1変換ホイール30のグリッパ34は、開閉機構を持たず、スプリング等によって引き付けられている一対のグリップ部材間にPETボトル6の首部を押し込んで保持させるタイプのグリッパである。
【0021】
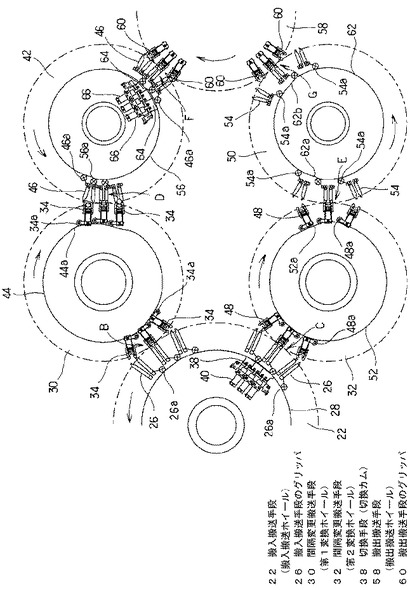
この第1変換ホイール30は、48πピッチ(図3の左側に示すグリッパ34参照)の間隔で受け取ったPETボトル6の搬送ピッチを30πピッチ(図3の右側に示すグリッパ34参照)にピッチ変換(PETボトル6の搬送間隔の変更)をして次の第1中継ホイール42(図3参照)に引き渡す。この第1変換ホイール30は、外周側に配置されているグリッパ34の内部側に円形のピッチ変換カム44が固定されており、各グリッパ34の後端部に設けられているカムフォロア34aがこのピッチ変換カム44に沿って移動することによりグリッパ34が揺動する。前記ピッチ変換カム44の、第1変換ホイール32から次の第1中継ホイール42へPETボトル6を受け渡す受け渡し位置Dに、揺動部44aが形成されており、各グリッパ34がこの揺動部44aの位置に到達すると、順次方向変換されてグリッパ34のPETボトル6を保持している部分が互いに接近し、30πピッチの間隔になって保持しているPETボトル6を第1中継ホイール42のグリッパ46に引き渡す。この第1変換ホイール30は、容器の搬送ピッチを縮小させる縮小搬送手段として構成されている。
【0022】
第2変換ホイール32は、その外周部に円周方向等間隔で複数のグリッパ48が設けられている。この第2変換ホイール32のグリッパ48も48πピッチで配置されており、搬入搬送ホイール22のグリッパ26からそのままPETボトル6を引き渡される。この第2変換ホイール32のグリッパ48も、前記第1変換ホイール30のグリッパ34と同様に、開閉機構を持たず、スプリング等によって引き付けられている一対のグリップ部材間にPETボトル6の首部を押し込んで保持させるタイプのグリッパである。
【0023】
この第2変換ホイール32は、48πピッチ(図3の左側に示すグリッパ48参照)の間隔で受け取ったPETボトル6の搬送ピッチを、第1変換ホイール30と逆にピッチを拡大して60πピッチ(図3の右側に示すグリッパ48参照)に変換をして次の第2中継ホイール50に引き渡す。この第2変換ホイール32は、外周部に配置されているグリッパ48の内部側に円形のピッチ変換カム52が固定されており、各グリッパ48の後端部に設けられているカムフォロア48aがこのピッチ変換カム52に沿って移動することによりグリッパ48が揺動する。前記ピッチ変換カム52の、第2変換ホイール32から次の第2中継ホイール50へPETボトル6を受け渡す受け渡し位置Eに、揺動部52aが形成されており、各グリッパ48がこの揺動部52aに来ると、順次方向変換されてグリッパ48のPETボトル6を保持している部分が互いに離隔し、60πピッチの間隔になって保持しているPETボトル6を第2中継ホイール50のグリッパ54に引き渡す。この第2変換ホイール32は、容器の搬送ピッチを拡大させる拡大搬送手段として構成されている。
【0024】
第1変換ホイール30からPETボトル6を受け渡される第1中継ホイール42は、外周部に円周方向等間隔で、複数のグリッパ46を備えている。この第1中継ホイール42のグリッパ46は30πピッチの間隔で配置されている。第1中継ホイール42のグリッパ46は、前記搬入搬送ホイール22のグリッパ26と同様に開閉式のグリッパであり、外周部に配置されたグリッパ46の内周側に固定されている円形のグリッパ開閉カム56に、グリッパ46の後端部に取り付けられているカムフォロア46aが沿って移動する。グリッパ開閉カム56の、第1変換ホイール30から第1中継ホイール42への受け渡し位置Dに、グリッパ開放用の凹部56aが形成されており、カムフォロア46aがこの凹部を通過する際に開放し、凹部を通過した時点でグリッパ46が閉じて、第1変換ホイール30のグリッパ34が保持しているPETボトル6を把持し、その後、第1中継ホイール42の回転に伴ってPETボトル6を取り出すようになっている。また、前記グリッパ開閉カム56の、この第1中継ホイール42から次の搬出搬送ホイール58への受け渡し位置に、グリッパ開放用の凹部(図示を省略)が形成されており、第1中継ホイール42のグリッパ46が把持しているPETボトル6を搬出搬送ホイール58のグリッパ60内に押し込んで保持させた後、開放してPETボトル6の受け渡しを行うようになっている。なお、搬出搬送ホイール58のグリッパ60も、前記第1変換ホイール30のグリッパ34と同様に、開閉機構を持たず、スプリング等によって引き付けられている一対のグリップ部材間にPETボトル6の首部を押し込んで保持させるタイプのグリッパである。
【0025】
また、第2変換ホイール32からPETボトル6を受け渡される第2中継ホイール50は、外周部に円周方向等間隔で、複数のグリッパ54を備えている。この第2中継ホイール50のグリッパ54は60πピッチの間隔で配置されている。第2中継ホイール50のグリッパ54は、第1中継ホイール42のグリッパ46と同様に開閉式のグリッパであり、各グリッパ54の内周側に固定されている円形のグリッパ開閉カム62に、グリッパ54の後端部に取り付けられているカムフォロア54aが沿って移動する。グリッパ開閉カム62の、第2変換ホイール32から第2中継ホイール50への受け渡し位置Eに、グリッパ開放用の凹部62aが形成されており、カムフォロア54aがこの凹部62aを通過する際に開放し、凹部62aを通過した時点でグリッパ54が閉じて、第2変換ホイール32のグリッパ48が保持しているPETボトル6を把持し、その後、第2中継ホイール50の回転に伴ってPETボトル6を取り出すようになっている。また、前記グリッパ開閉カム62の、この第2中継ホイール50から次の搬出搬送ホイール58への受け渡し位置Gに、グリッパ開放用の凹部62bが形成されており、第2中継ホイール50のグリッパ54が把持しているPETボトル6を搬出搬送ホイール58のグリッパ60内に押し込んで保持させた後、開放してPETボトル6の受け渡しを行うようになっている。
【0026】
第1中継ホイール42と第2中継ホイール50は、この実施例では反時計回り方向に回転している(図1および図3の矢印参照)。従って、これら両中継ホイール42、50からPETボトル6を受け渡される搬出搬送手段としての搬出搬送ホイール58は、時計回り方向に回転しており、第1中継ホイール42と第2中継ホイール50の何れか一方からPETボトル6の引き渡しを受けるようになっている。第1中継ホイール42から搬出搬送ホイール58に受け渡しを行う場合には、搬出搬送ホイール58のグリッパ60が第2中継ホイール50からの受け渡し位置Gを通過する際にはPETボトル6を保持していない状態なので問題はないが、第2中継ホイール50から搬出搬送ホイール58に受け渡しを行う場合には、PETボトル6を受け取って保持している搬出搬送ホイール58のグリッパ60が、第1中継ホイール42との受け渡し位置Fに到達すると、保持されているPETボトル6が第1中継ホイール42のグリッパ46と干渉してしまう。そこで、干渉を避けるために、第1中継ホイール42から搬出搬送ホイール58への受け渡し位置Fに切り換えカム64を配置している。この切り換えカム64は、エアシリンダ66によって進退動する可動カムであり、切り換えカム64がエアシリンダ66の作動によって前進すると、グリッパ46の後端に取り付けたカムフォロア46aを押圧してグリッパ46の開放位置を早めるようになっている。
【0027】
搬出搬送ホイール58は、外周部に円周方向等間隔で複数のグリッパ60が設けられている。これらグリッパ60は30πピッチの間隔で配置されている。従って、第1中継ホイール42のグリッパ46からPETボトル6の受け渡しを行う際には、両ホイール42、58ともグリッパ46、60が等しい間隔である30πピッチで配置されているので、そのまま第1中継ホイール42の各グリッパ46から搬出搬送ホイール58の各グリッパ60に受け渡しが行われる。一方、第2中継ホイール50のグリッパ54は、第1中継ホイール42のグリッパ46の倍のピッチ(60πピッチ)で配置されているので、第2中継ホイール50の各グリッパ54に把持されているPETボトル6は、搬出搬送ホイール58の各グリッパ60に対し2倍の間隔で一つおきに受け渡される。搬出搬送ホイール58に等しい間隔でPETボトル6を受け渡す第1変換ホイール30と第1中継ホイール42が、請求項の等間隔手段を構成し、2倍の間隔で受け渡す第2変換ホイール32と第2中継ホイール50が請求項の倍間隔手段を構成している。このように間隔変更搬送手段は、回転搬送手段から構成される倍間隔手段と等間隔手段を備え、これら倍間隔手段と等間隔手段の使用を切り換えることができるようになっている。
【0028】
容器搬送装置1の最終位置の搬出搬送ホイール58に設けられたグリッパ60に把持されているPETボトル6は、次の第3チャンバー14に設置されているフィラ4への入口に設けられている供給ホイール16(図1および図4参照)のグリッパ(図示せず)に受け渡される。この供給ホイール16のグリッパは、外周側に円周方向等間隔(前記搬出搬送ホイール58のグリッパ60と同じ30πピッチ)で配置されており、搬出搬送ホイール58のすべてのグリッパ60にPETボトル6が保持されている場合には、この供給ホイール16のグリッパのすべてにPETボトル6が受け渡され、搬出搬送ホイール58のグリッパ60に一つおきでPETボトル6が保持されている場合には、供給ホイール16の一つおきのグリッパに受け渡される。供給ホイール16は、所定位置でグリッパが開閉動作される第2中継ホイール50と同様に構成されている。
【0029】
供給ホイール16のグリッパに把持されたPETボトル6は、充填機4に供給される。充填機4には、図4に示すように、円周方向等間隔で複数のグリッパ68が設けられている。この充填機4のグリッパ68は30πピッチの間隔で配置されている。供給ホイール16のグリッパのすべてに小型容器(小型のPETボトル)6Aが把持されている場合には、充填機4のグリッパ68すべてに順次PETボトル6Aが受け渡される(図4の丸形の容器6A参照)。また、大型容器(大型のPETボトル)6Bの場合には、供給ホイール16のグリッパの一つおきにPETボトルが把持されており、充填機4のグリッパ68に対しても、一つおきに大型のPETボトル6Bが受け渡される(図4の角形の容器6B参照)。
【0030】
以上の構成に係る容器搬送装置1の作動について説明する。この容器搬送装置1の上流側に配置されているブロー成型機2でPETボトル6が成型される。このブロー成型機2はPETボトル6を100πピッチで搬送しており、このブロー成型機2からPETボトル6を受け渡される搬出ホイール10で、100πピッチから48πピッチにPETボトル6の搬送間隔を変更する。
【0031】
48πピッチの搬送間隔でPETボトル6を搬送する搬出ホイール10から、容器搬送装置1の上流端の受け渡しホイール18にPETボトル6が受け渡される。受け渡しホイール18はその外周部に48πピッチでグリッパ20が配置されており、搬出ホイール10からそのまま48πピッチでPETボトル6の受け渡しが行われる。
【0032】
受け渡しホイール18の次の搬入搬送ホイール22も、48πピッチでグリッパ26が設けられており、受け渡し位置Aで、受け渡しホイール18から搬入搬送ホイール22へ48πピッチのままで受け渡しが行われる。
【0033】
搬入搬送ホイール22では、搬送しているPETボトル6のサイズによって異なるピッチにピッチ変換をするために、PETボトル6のサイズに応じて第1変換ホイール30と第2変換ホイール32のいずれかに振り分けを行う。小型容器6Aの場合には、搬入搬送ホイール22から第1変換ホイール30に受け渡す。第1変換ホイール30も、搬入搬送ホイール22と同様に、グリッパ34が48πピッチで設けられており、搬入搬送ホイール22から第1変換ホイール30への小型容器6Aの受け渡しは48πピッチのままで行われる。小型容器6Aを受け取った第1変換ホイール30は、ピッチ変換カム44の揺動部44aによってグリッパ34を揺動させることにより、受け渡し位置Dにおいてグリッパ34に保持されている小型容器6Aの間隔が30πピッチになるように切り換える。なお、搬入搬送ホイール22は、この実施例では図1ないし図3の反時計回り方向に回転しており、そのグリッパ26が把持しているPETボトル6を第1変換ホイール30に受け渡す場合には、PETボトル6を把持しているグリッパ26が、第2変換ホイール32との受け渡し位置Cで第2変換ホイール32にPETボトル6を引き渡さずに通過しなければならないので、エアシリンダ40の作動によって切り換えカム38を前進させてグリッパ26のカムフォロア26aを押圧することによりグリッパ26の閉鎖状態を維持させる。
【0034】
第1変換ホイール30から小型容器6Aを受け渡される第1中継ホイール42は、30πピッチでグリッパ46が配置されており、30πピッチの間隔で小型容器6Aを受け取ったまま搬送し、同じく30πピッチでグリッパ60が配置されている搬出搬送ホイール58に小型容器6Aを受け渡す。第1変換ホイール30から小型容器6Aを受け取った第1中継ホイール42は、すべてのグリッパ46に小型容器6Aが把持されており、搬出搬送ホイール58もすべてのグリッパ60に小型容器6Aが保持される。
【0035】
すべてのグリッパ60に小型容器6Aが保持された搬出搬送ホイール58から、この搬出搬送ホイール58と同様に30πピッチでグリッパ(図示せず)が配置されている供給ホイール16のすべてのグリッパに小型容器6Aが受け渡される。さらに、充填機4にも30πピッチでグリッパ68が設けられており、すべてのグリッパ68に小型容器6Aが受け渡される(図4の円形容器6A参照)。
【0036】
搬入搬送ホイール22に送られてきたPETボトル6が大型容器6Bの場合には、搬入搬送ホイール22のグリッパ26から、大型容器用のルートである第2変換ホイール32に引き渡す。この場合には、搬入搬送ホイール22のグリッパ26から第2変換ホイール30のグリッパ34への引き渡しを行うので、切り換えカム38は作動させず、グリッパ26の開閉によってグリッパ48へ大型容器6Bの受け渡しを行う。第2変換ホイール32も、搬入搬送ホイール22と同様に、グリッパ48が48πピッチの間隔で設けられており、搬入搬送ホイール22から第2変換ホイール32への大型容器6Bの受け渡しは48πピッチのままで行われる。大型容器6Bを受け取った第2変換ホイール32は、ピッチ変換カム52の揺動部52aによってグリッパ48を揺動させることにより、受け渡し位置Eにおいてグリッパ48に保持されている大型容器6Bの間隔を60πピッチに切り換える。
【0037】
第2変換ホイール32から大型容器6Bを受け渡される第2中継ホイール50は、60πピッチでグリッパ54が配置されており、大型容器6Bを60πピッチの間隔で受け取ったまま搬送し、30πピッチでグリッパ60が配置されている搬出搬送ホイール58に大型容器6Bを受け渡す。第2変換ホイール32から大型容器6Bを受け取った第2中継ホイール50は、60πピッチで配置されているすべてのグリッパ54に大型容器6Bが保持されており、次に受け渡しを行う搬出搬送ホイール58は30πピッチでグリッパ60が配置されているので、搬出搬送ホイール58の一つおきのグリッパ60に大型容器6Bが引き渡される。
【0038】
搬出搬送ホイール58のグリッパ60に第2中継ホイール50から大型容器6Bが受け渡された場合には、このグリッパ60が大型容器6Bを保持した状態で第1中継ホイール42との受け渡し位置Fを通過するので、第2中継ホイール42のグリッパ46との干渉を避けなければならない。そこで、エアシリンダ66の作動によって切り換えカム64を前進させて各グリッパ46のカムフォロア46aを押圧し、グリッパ46を小型容器6Aの受け渡しを行うときよりも早く開放し、開放した状態のまま受け渡し位置Fを通過させる。
【0039】
一つおきのグリッパ60に大型容器6Bが保持された搬出搬送ホイール58から、この搬出搬送ホイール58のグリッパ60と同様に30πピッチでグリッパ(図示せず)が配置されている充填機4への供給ホイール16には、一つおきのグリッパに大型容器6Bが受け渡される。また、充填機4にも30πピッチでグリッパ68が設けられており、一つおきのグリッパ68に大型容器6Bが受け渡される(図4の角形容器6B参照)。なお、ブロー成型機はボトルを成形するための金型を備えているため、容器の搬送ピッチは充填機よりも大きく、多くの場合は2倍よりも大きい。充填機に1本ずつ連続的に、また、一つおきに容器を受け渡す場合には、ブロー成型機から充填機の2倍を越える搬送ピッチで搬出される容器の搬送ピッチを、一旦、搬出搬送手段のグリッパの配置間隔以上、かつ、2倍以下の搬送ピッチに縮小させてから、その後、搬出搬送手段と等間隔または2倍の間隔に変更しているので、特に搬出搬送手段と等間隔に変更する場合に、変更幅が大きくなりすぎず、回転搬送手段間で安定的に受け渡しを行うことができる。
【実施例2】
【0040】
前記実施例では、容器6の搬送ピッチを縮小する場合には、第1変換ホイール30と第1中継ホイール42を介して搬出搬送ホイール58に容器6を受け渡し、搬送ピッチを拡大する場合には、第2変換ホイール32と第2中継ホイール50を介して容器6を受け渡すようにしていたが、この第2実施例では、図5(a)、(b)に示すように、単一の変換ホイール130で容器の搬送ピッチを変更できるようにしている。この実施例では、変換ホイール130のグリッパ134の内周側に配置された共通カム144の、変換ホイール130から搬出搬送ホイール158への受け渡し位置Jの上下に、等間隔手段としての縮小用カム170と倍間隔手段としての拡大用カム172をそれぞれ配置している。これらのカム170、172は、切換手段としてのエアシリンダ174(拡大用カム172のエアシリンダは共通カム144の裏側に配置されている)によって進退動できるようになっている。カム170、172が前進したときには、グリッパ134のカムフォロア134aに係合してグリッパ134を揺動させる位置に移動し、後退したときには、カムフォロア134aに干渉しない位置に退避する。
【0041】
前記構成では、搬入搬送ホイール122のグリッパ126によって48πピッチの間隔で搬送されてきた容器は、変換ホイール130への受け渡し位置Hで48πの搬送ピッチのまま変換ホイール130のグリッパ134に受け渡される。容器の搬送ピッチを拡大する場合には、縮小用カム170を後退させるとともに、拡大用カム172を前進させ、受け渡し位置Jでグリッパ134の間隔が拡大するように揺動させる。グリッパ134の揺動によって把持されている容器の間隔を60πに拡大し、搬出搬送ホイール158に30πピッチの間隔で設けられているグリッパ160の一つおきに受け渡すことにより、容器の搬送間隔を60πピッチに拡大する。逆に、容器の搬送ピッチを縮小する場合には、拡大用カム172を後退させるとともに、縮小用カム170を前進させて、受け渡し位置Jでグリッパ134の間隔が接近するように揺動させる。変換ホイール130のグリッパ134に把持されている容器が30πピッチとなるようにグリッパ134を接近させた状態で、同じく30πピッチで設けられている搬出搬送ホイール158のグリッパ160に引き渡す。この実施例でも、前記第1実施例と同様の作用効果を奏することができる。なお、この実施例では、変換ホイール130から搬出搬送ホイール158に直接容器の受け渡しを行うようになっており、中継ホイールは必要としない。
【符号の説明】
【0042】
1 容器搬送装置
6 容器(PETボトル)
6A 小型容器
6B 大型容器
22 搬入搬送手段(搬入搬送ホイール)
26 搬入搬送手段のグリッパ
30 間隔変更搬送手段(第1変換ホイール)
32 間隔変更搬送手段(第2変換ホイール)
38 切換手段(切換カム)
58 搬出搬送手段(搬出搬送ホイール)
60 搬出搬送手段のグリッパ
【技術分野】
【0001】
本発明は、容器の首部を把持して吊り下げた状態で、回転ホイール間を受け渡して搬送する容器搬送装置に係り、特に、大型容器と小型容器に兼用可能な容器搬送装置に関するものである。
【背景技術】
【0002】
例えば、同一の充填機で大型容器と小型容器を兼用するために、小型容器に合わせて充填ノズルを配置し、大型容器の場合には、小型容器の倍のピッチで容器を供給して、各充填ノズルに対して一つおきに大型容器を位置させて充填を行うようにした充填装置が従来から知られている(特許文献1参照)。
【0003】
また、PETボトルに連続的に充填を行う充填ラインとして、ブロー成形から充填までを行うように構成したものがすでに知られている(特許文献2参照)。この特許文献2に記載された発明では、充填機はブロー成形されたPETボトルの首部を把持するグリッパを備えており、各グリッパによって容器を吊り下げた状態で搬送しつつ充填を行うようになっており、PETボトルを成形するブロー成形機から充填機までは、グリッパを備えた複数のホイールによるネックハンドリングによって受け渡しを行うようになっている。
【0004】
前記のような充填ラインにおいて、特許文献1の発明と同様に小型容器と大型容器を兼用させるために、充填機に小型容器の倍のピッチで大型容器を供給するようにするには、グリッパホイルにおいてPETボトルの搬送ピッチを変更する必要がある。通常ブロー成形機と充填機ではグリッパの間隔が異なっており、このような場合に間隔変更ホイールを介して搬送ピッチを変換させることが知られている(特許文献3参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特公平3−14720号公報
【特許文献2】特開2010−241577号公報
【特許文献3】特開2008−100845号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
前記特許文献3のように間隔変更ホイールを用いた場合であっても、小型容器と大型容器に兼用する際に、必要に応じて間隔の変更を行うことはできず、間隔変更ホイールを交換する必要性が生じるという問題があった。
【課題を解決するための手段】
【0007】
本発明は、前記課題を解決するためになされたもので、内容液を収容する胴部とこの胴部よりも細い首部を有する容器を、首部を把持した吊り下げ状態で搬送する容器搬送装置であって、首部を把持するグリッパを円周方向等間隔に配置した回転搬送手段を複数備え、異なる回転搬送手段間で容器を受け渡して搬送し、搬送する間に容器の搬送間隔を変更する容器搬送装置において、前記複数の回転搬送手段は、上流側から容器が搬入される搬入搬送手段と、下流側へ容器を搬出する搬出搬送手段と、これら搬入搬送手段と搬出搬送手段の間に設けられて容器の搬送間隔を変更する間隔変更搬送手段とからなり、前記搬入搬送手段のグリッパの配置間隔が、前記搬出搬送手段のグリッパの配置間隔以上、かつ、前記搬出搬送手段のグリッパの配置間隔の2倍以下であって、前記間隔変更手段は、前記搬出搬送手段のグリッパの配置間隔の2倍の間隔で搬出搬送手段に容器を受け渡す倍間隔手段と、前記搬出搬送手段のグリッパの配置間隔と等しい間隔で搬出搬送手段に容器を受け渡す等間隔手段とを備え、これら倍間隔手段と等間隔手段の使用を切り換える切換手段を設けたことを特徴とするものである。
【0008】
また、第2の発明は、前記第1の発明において、前記搬入搬送手段の上流側に配置されて、前記搬出搬送手段のグリッパの配置間隔の2倍の間隔よりも大きな間隔から搬入搬送手段の配置間隔まで、容器の搬送間隔を縮小させる搬入側縮小搬送手段を備えたことを特徴とするものである。
【0009】
さらに、第3の発明は、前記第1の発明または第2の発明において、前記倍間隔手段と等間隔手段が異なる回転搬送手段から構成され、前記切換手段は前記搬入搬送手段に設けられて、これら異なる回転搬送手段への容器の受け渡しを切り換えることを特徴とするものである。
【0010】
また、第4の発明は、前記第1の発明または第2の発明において、前記倍間隔手段と等間隔手段が単一の回転搬送手段に設けられたカムより構成され、前記切換手段はこの回転搬送手段に設けられて、これらカムの使用を切り換えることを特徴とするものである。
【発明の効果】
【0011】
本発明の容器搬送装置は、グリッパを円周方向等間隔に配置した搬入搬送手段と搬出搬送手段との間に間隔変更搬送手段を設け、搬入搬送手段のグリッパの配置間隔が、前記搬出搬送手段のグリッパの配置間隔以上、かつ、前記搬出搬送手段のグリッパの配置間隔の2倍以下であって、前記間隔変更手段は、前記搬出搬送手段のグリッパの配置間隔の2倍の間隔で搬出搬送手段に容器を受け渡す倍間隔手段と、前記搬出搬送手段のグリッパの配置間隔と等しい間隔で搬出搬送手段に容器を受け渡す等間隔手段とを備える構成とし、切換手段によって、これら倍間隔手段と等間隔手段の使用を切り換えるようにしたので、ホイール等の交換をすることなく、容器搬送装置を大型容器と小型容器に兼用させることが可能になるという利点がある。
【図面の簡単な説明】
【0012】
【図1】図1は容器搬送装置の全体の配置を示す平面図である。(実施例1)
【図2】図2は搬入搬送手段と間隔変更搬送手段との受け渡しを行う部分の構成を示す平面図である。
【図3】図3は各回転搬送手段の構成を示す平面図である。
【図4】図4は充填機への容器供給部の構成を示す平面図である。
【図5】図5は変換ホイールから搬出搬送ホイールへの受け渡しを行う部分の構成を示す平面図であり、図(a)は搬送ピッチの拡大時を、図(b)は搬送ピッチの縮小時を示す(実施例2)
【発明を実施するための形態】
【0013】
ブロー成型機によって成形され、充填機によって液体が充填されるPETボトル等の容器の首部を把持して吊り下げた状態で、前記ブロー成型機から充填機へ搬送する容器搬送装置であり、容器の首部を把持するグリッパが円周方向等間隔に配置され、上流側から容器が搬入される搬入搬送手段と、グリッパが円周方向等間隔に配置され、下流側へ容器を搬出する搬出搬送手段と、これら搬入搬送手段と搬出搬送手段との間に配置され、容器の搬送間隔を変更する間隔変更搬送手段とを備えており、搬入搬送手段のグリッパの配置間隔が、搬出搬送手段のグリッパの配置間隔よりも大きく、かつ搬送間隔の2倍よりも小さくなるように構成され、さらに、間隔変更搬送手段に、搬入搬送手段から受け取った容器の搬送間隔(例えば48πピッチ)を、搬出搬送手段のグリッパ配置間隔(例えば30πピッチ)の2倍(60πピッチ)に拡大する拡大搬送手段と、搬出搬送手段のグリッパの配置間隔と等しい間隔(30πピッチ)に縮小させる縮小搬送手段の2つの搬送手段を設け、切換カム等の切換手段によって、搬入搬送手段により搬送されてきた容器を、前記拡大搬送手段と縮小搬送手段のいずれかに受け渡すようにするという構成で、回転搬送手段によって搬送している間に容器の搬送間隔を変更することにより異なるサイズの容器に兼用することを可能にするという目的を達成する。なお、グリッパの配置間隔(ピッチ)は、グリッパが移動する回転円周の長さをグリッパの数で割ることで求めることができ、例えば、回転円周の直径が960mmでグリッパ数が32であれば、960π(円周)/32=30π(mmピッチ)として表すことができる。
【実施例1】
【0014】
以下、図面に示す実施例により本発明を説明する。この容器搬送装置(全体として符号1で示す)は、上流側のブロー成形機2と下流側の充填機4の間に配置され、ブロー成形機2から搬出された際の容器6の搬送ピッチを変換して充填機4に供給する。特に、この実施例に係る装置では、小型容器6Aと大型容器6Bに兼用するために、搬送ピッチを小型容器6A用のピッチと大型容器6B用のピッチに変更できるようになっている。なお、この明細書では、小型容器を符号6Aで、また大型容器を符号6Bで示す(図4参照)。この実施例に係る容器搬送装置1に適用される容器6は、詳細な形状は図示しないが、内容液を収容する胴部と、この胴部よりも細い首部を有するPETボトルであり、首部に形成されたフランジの上部または下部を把持し、または保持して吊り下げた状態で搬送する。小型容器6Aと大型容器6Bでは、容器の首部の径は変わらないものの、胴部の外形寸法は大きく異なっている。
【0015】
図1に示す第1チャンバー8内にブロー成型機2が配置されており、供給されたパリソンをブロー成形によりPETボトル6に成形した後、搬出ホイール10を介して前記容器搬送装置1に搬入する。この実施例では、ブロー成型機2では、PETボトル6を100πピッチで搬送するようになっており、その後、搬出ホイール10において容器6の搬送間隔を100πピッチからこれよりも小さな48πピッチにピッチ変換を行った後、容器搬送装置1に搬入する。この搬出ホイール10は、後述する第1変換ホイール30と同様に構成され、請求項に記載した搬入側縮小搬送手段を構成している。
【0016】
第2チャンバー12内に設置された容器搬送装置1では、48πピッチの搬送間隔で搬入されたPETボトル6を、30πピッチの搬送間隔に変換し、または60πピッチの搬送間隔に変換した後、充填機4に供給する。充填機4は、第2チャンバー12の下流側に連結された第3チャンバー14内に配置されており、前記容器搬送装置1から、大型容器6Bの場合には30πピッチで、また、小型容器6Aの場合には60πピッチで供給ホイール16が受け取ったPETボトル6が供給される。
【0017】
容器供給装置1の入口側に配置された受け渡しホイール18は、図2に示すように、外周部に円周方向等間隔で複数のグリッパ20が設けられている。この受け渡しホイール18では、グリッパ20は48πピッチで配置されており、各グリッパ20にPETボトル6が保持されて搬送される。この受け渡しホイール18から次の搬入搬送手段である搬入搬送ホイール22への受け渡し位置Aにグリッパ開閉カム24が配置されている。グリッパ20の一方のアームの後端に取り付けたカムフォロア20aがこのグリッパ開閉カム24に係合して移動しており、受け渡しホイール18のグリッパ20から搬入搬送ホイール22のグリッパ26へPETボトル6の受け渡しを行う際に、このグリッパ20の開放を行う。
【0018】
次の搬入搬送ホイール22は、外周部に円周方向等間隔で複数のグリッパ26が設けられている。この実施例では、各グリッパ26は48πピッチで配置されている。この搬入搬送ホイール22の、グリッパ26が配置されている位置の内周側に円形のグリッパ開閉カム28が固定されている。各グリッパ26の一方のアームの後端にカムフォロア26aが取り付けられ、前記グリッパ開閉カム28の外周カム面28aに常時係合している。この搬入搬送ホイール22は、上流側の前記受け渡しホイール18からPETボトル6を受け取り、下流側の2箇所のピッチ変換ホイール(第1変換ホイール30と第2変換ホイール32)の何れか一方にそのPETボトル6を引き渡すようになっており、前記グリッパ開閉カム28の、前記上流側からの受け渡し位置Aと2箇所の下流側への受け渡し位置B、Cに、それぞれ開放用の凹部が形成されている。前記第1変換ホイール30と第2変換ホイール32が、請求項1に記載した間隔変更搬送手段を構成している。
【0019】
搬入搬送ホイール22には、48πピッチでグリッパ26が設けられており、その下流側に配置され、48πピッチでグリッパ34が設けられている第1変換ホイール30と、同じく48πピッチでグリッパ36が設けられている第2変換ホイール32のいずれかのグリッパ34、36へPETボトル6を受け渡す。この実施例では、搬入搬送ホイール22は図の反時計回り方向に回転しており(図1〜図3の矢印参照)、PETボトル6を各グリッパ26に保持して回転してきた搬入搬送ホイール22から第2変換ホイール32のグリッパ36に引き渡す場合には、そのまま受け渡し位置Cでグリッパ26を開閉させて受け渡しを行う。また、搬入搬送ホイール22のグリッパ26から第1変換ホイール30のグリッパ34にPETボトル6を引き渡す場合には、搬入搬送ホイール22のグリッパ26がPETボトル6を保持した状態で第2変換ホイール32への受け渡し位置Cを通過しなければならない。そこで、搬入搬送ホイール22の、第2変換ホイール32への受け渡し位置Cに、切換手段(切換カム)38が設置されている。この切換カム38は、エアシリンダ40によって進退動できる可動カムであり、後退時には先端カム面が前記円形のグリッパ開閉カム28のカム面28aよりも内側に位置して、グリッパ26全体の方向に影響を与えないようになっている。また、切換カム38がエアシリンダ40の作動によって前進したときには、カムフォロア26aを半径方向外方へ押し出すことによりグリッパ26を閉じた状態のまま第2変換ホイール32への受け渡し位置Cを通過させて、次の第1変換ホイール30への受け渡し位置でPETボトル6の受け渡しを行う。
【0020】
第1変換ホイール30は、その外周部に円周方向等間隔で複数のグリッパ34が設けられている。この第1変換ホイール30のグリッパ34も48πピッチで配置されており、搬入搬送ホイール22のグリッパ26からそのままPETボトル6を引き渡される。前記搬入搬送ホイール22のグリッパ26は、開閉してPETボトル6の首部を把持するグリッパであるが、この第1変換ホイール30のグリッパ34は、開閉機構を持たず、スプリング等によって引き付けられている一対のグリップ部材間にPETボトル6の首部を押し込んで保持させるタイプのグリッパである。
【0021】
この第1変換ホイール30は、48πピッチ(図3の左側に示すグリッパ34参照)の間隔で受け取ったPETボトル6の搬送ピッチを30πピッチ(図3の右側に示すグリッパ34参照)にピッチ変換(PETボトル6の搬送間隔の変更)をして次の第1中継ホイール42(図3参照)に引き渡す。この第1変換ホイール30は、外周側に配置されているグリッパ34の内部側に円形のピッチ変換カム44が固定されており、各グリッパ34の後端部に設けられているカムフォロア34aがこのピッチ変換カム44に沿って移動することによりグリッパ34が揺動する。前記ピッチ変換カム44の、第1変換ホイール32から次の第1中継ホイール42へPETボトル6を受け渡す受け渡し位置Dに、揺動部44aが形成されており、各グリッパ34がこの揺動部44aの位置に到達すると、順次方向変換されてグリッパ34のPETボトル6を保持している部分が互いに接近し、30πピッチの間隔になって保持しているPETボトル6を第1中継ホイール42のグリッパ46に引き渡す。この第1変換ホイール30は、容器の搬送ピッチを縮小させる縮小搬送手段として構成されている。
【0022】
第2変換ホイール32は、その外周部に円周方向等間隔で複数のグリッパ48が設けられている。この第2変換ホイール32のグリッパ48も48πピッチで配置されており、搬入搬送ホイール22のグリッパ26からそのままPETボトル6を引き渡される。この第2変換ホイール32のグリッパ48も、前記第1変換ホイール30のグリッパ34と同様に、開閉機構を持たず、スプリング等によって引き付けられている一対のグリップ部材間にPETボトル6の首部を押し込んで保持させるタイプのグリッパである。
【0023】
この第2変換ホイール32は、48πピッチ(図3の左側に示すグリッパ48参照)の間隔で受け取ったPETボトル6の搬送ピッチを、第1変換ホイール30と逆にピッチを拡大して60πピッチ(図3の右側に示すグリッパ48参照)に変換をして次の第2中継ホイール50に引き渡す。この第2変換ホイール32は、外周部に配置されているグリッパ48の内部側に円形のピッチ変換カム52が固定されており、各グリッパ48の後端部に設けられているカムフォロア48aがこのピッチ変換カム52に沿って移動することによりグリッパ48が揺動する。前記ピッチ変換カム52の、第2変換ホイール32から次の第2中継ホイール50へPETボトル6を受け渡す受け渡し位置Eに、揺動部52aが形成されており、各グリッパ48がこの揺動部52aに来ると、順次方向変換されてグリッパ48のPETボトル6を保持している部分が互いに離隔し、60πピッチの間隔になって保持しているPETボトル6を第2中継ホイール50のグリッパ54に引き渡す。この第2変換ホイール32は、容器の搬送ピッチを拡大させる拡大搬送手段として構成されている。
【0024】
第1変換ホイール30からPETボトル6を受け渡される第1中継ホイール42は、外周部に円周方向等間隔で、複数のグリッパ46を備えている。この第1中継ホイール42のグリッパ46は30πピッチの間隔で配置されている。第1中継ホイール42のグリッパ46は、前記搬入搬送ホイール22のグリッパ26と同様に開閉式のグリッパであり、外周部に配置されたグリッパ46の内周側に固定されている円形のグリッパ開閉カム56に、グリッパ46の後端部に取り付けられているカムフォロア46aが沿って移動する。グリッパ開閉カム56の、第1変換ホイール30から第1中継ホイール42への受け渡し位置Dに、グリッパ開放用の凹部56aが形成されており、カムフォロア46aがこの凹部を通過する際に開放し、凹部を通過した時点でグリッパ46が閉じて、第1変換ホイール30のグリッパ34が保持しているPETボトル6を把持し、その後、第1中継ホイール42の回転に伴ってPETボトル6を取り出すようになっている。また、前記グリッパ開閉カム56の、この第1中継ホイール42から次の搬出搬送ホイール58への受け渡し位置に、グリッパ開放用の凹部(図示を省略)が形成されており、第1中継ホイール42のグリッパ46が把持しているPETボトル6を搬出搬送ホイール58のグリッパ60内に押し込んで保持させた後、開放してPETボトル6の受け渡しを行うようになっている。なお、搬出搬送ホイール58のグリッパ60も、前記第1変換ホイール30のグリッパ34と同様に、開閉機構を持たず、スプリング等によって引き付けられている一対のグリップ部材間にPETボトル6の首部を押し込んで保持させるタイプのグリッパである。
【0025】
また、第2変換ホイール32からPETボトル6を受け渡される第2中継ホイール50は、外周部に円周方向等間隔で、複数のグリッパ54を備えている。この第2中継ホイール50のグリッパ54は60πピッチの間隔で配置されている。第2中継ホイール50のグリッパ54は、第1中継ホイール42のグリッパ46と同様に開閉式のグリッパであり、各グリッパ54の内周側に固定されている円形のグリッパ開閉カム62に、グリッパ54の後端部に取り付けられているカムフォロア54aが沿って移動する。グリッパ開閉カム62の、第2変換ホイール32から第2中継ホイール50への受け渡し位置Eに、グリッパ開放用の凹部62aが形成されており、カムフォロア54aがこの凹部62aを通過する際に開放し、凹部62aを通過した時点でグリッパ54が閉じて、第2変換ホイール32のグリッパ48が保持しているPETボトル6を把持し、その後、第2中継ホイール50の回転に伴ってPETボトル6を取り出すようになっている。また、前記グリッパ開閉カム62の、この第2中継ホイール50から次の搬出搬送ホイール58への受け渡し位置Gに、グリッパ開放用の凹部62bが形成されており、第2中継ホイール50のグリッパ54が把持しているPETボトル6を搬出搬送ホイール58のグリッパ60内に押し込んで保持させた後、開放してPETボトル6の受け渡しを行うようになっている。
【0026】
第1中継ホイール42と第2中継ホイール50は、この実施例では反時計回り方向に回転している(図1および図3の矢印参照)。従って、これら両中継ホイール42、50からPETボトル6を受け渡される搬出搬送手段としての搬出搬送ホイール58は、時計回り方向に回転しており、第1中継ホイール42と第2中継ホイール50の何れか一方からPETボトル6の引き渡しを受けるようになっている。第1中継ホイール42から搬出搬送ホイール58に受け渡しを行う場合には、搬出搬送ホイール58のグリッパ60が第2中継ホイール50からの受け渡し位置Gを通過する際にはPETボトル6を保持していない状態なので問題はないが、第2中継ホイール50から搬出搬送ホイール58に受け渡しを行う場合には、PETボトル6を受け取って保持している搬出搬送ホイール58のグリッパ60が、第1中継ホイール42との受け渡し位置Fに到達すると、保持されているPETボトル6が第1中継ホイール42のグリッパ46と干渉してしまう。そこで、干渉を避けるために、第1中継ホイール42から搬出搬送ホイール58への受け渡し位置Fに切り換えカム64を配置している。この切り換えカム64は、エアシリンダ66によって進退動する可動カムであり、切り換えカム64がエアシリンダ66の作動によって前進すると、グリッパ46の後端に取り付けたカムフォロア46aを押圧してグリッパ46の開放位置を早めるようになっている。
【0027】
搬出搬送ホイール58は、外周部に円周方向等間隔で複数のグリッパ60が設けられている。これらグリッパ60は30πピッチの間隔で配置されている。従って、第1中継ホイール42のグリッパ46からPETボトル6の受け渡しを行う際には、両ホイール42、58ともグリッパ46、60が等しい間隔である30πピッチで配置されているので、そのまま第1中継ホイール42の各グリッパ46から搬出搬送ホイール58の各グリッパ60に受け渡しが行われる。一方、第2中継ホイール50のグリッパ54は、第1中継ホイール42のグリッパ46の倍のピッチ(60πピッチ)で配置されているので、第2中継ホイール50の各グリッパ54に把持されているPETボトル6は、搬出搬送ホイール58の各グリッパ60に対し2倍の間隔で一つおきに受け渡される。搬出搬送ホイール58に等しい間隔でPETボトル6を受け渡す第1変換ホイール30と第1中継ホイール42が、請求項の等間隔手段を構成し、2倍の間隔で受け渡す第2変換ホイール32と第2中継ホイール50が請求項の倍間隔手段を構成している。このように間隔変更搬送手段は、回転搬送手段から構成される倍間隔手段と等間隔手段を備え、これら倍間隔手段と等間隔手段の使用を切り換えることができるようになっている。
【0028】
容器搬送装置1の最終位置の搬出搬送ホイール58に設けられたグリッパ60に把持されているPETボトル6は、次の第3チャンバー14に設置されているフィラ4への入口に設けられている供給ホイール16(図1および図4参照)のグリッパ(図示せず)に受け渡される。この供給ホイール16のグリッパは、外周側に円周方向等間隔(前記搬出搬送ホイール58のグリッパ60と同じ30πピッチ)で配置されており、搬出搬送ホイール58のすべてのグリッパ60にPETボトル6が保持されている場合には、この供給ホイール16のグリッパのすべてにPETボトル6が受け渡され、搬出搬送ホイール58のグリッパ60に一つおきでPETボトル6が保持されている場合には、供給ホイール16の一つおきのグリッパに受け渡される。供給ホイール16は、所定位置でグリッパが開閉動作される第2中継ホイール50と同様に構成されている。
【0029】
供給ホイール16のグリッパに把持されたPETボトル6は、充填機4に供給される。充填機4には、図4に示すように、円周方向等間隔で複数のグリッパ68が設けられている。この充填機4のグリッパ68は30πピッチの間隔で配置されている。供給ホイール16のグリッパのすべてに小型容器(小型のPETボトル)6Aが把持されている場合には、充填機4のグリッパ68すべてに順次PETボトル6Aが受け渡される(図4の丸形の容器6A参照)。また、大型容器(大型のPETボトル)6Bの場合には、供給ホイール16のグリッパの一つおきにPETボトルが把持されており、充填機4のグリッパ68に対しても、一つおきに大型のPETボトル6Bが受け渡される(図4の角形の容器6B参照)。
【0030】
以上の構成に係る容器搬送装置1の作動について説明する。この容器搬送装置1の上流側に配置されているブロー成型機2でPETボトル6が成型される。このブロー成型機2はPETボトル6を100πピッチで搬送しており、このブロー成型機2からPETボトル6を受け渡される搬出ホイール10で、100πピッチから48πピッチにPETボトル6の搬送間隔を変更する。
【0031】
48πピッチの搬送間隔でPETボトル6を搬送する搬出ホイール10から、容器搬送装置1の上流端の受け渡しホイール18にPETボトル6が受け渡される。受け渡しホイール18はその外周部に48πピッチでグリッパ20が配置されており、搬出ホイール10からそのまま48πピッチでPETボトル6の受け渡しが行われる。
【0032】
受け渡しホイール18の次の搬入搬送ホイール22も、48πピッチでグリッパ26が設けられており、受け渡し位置Aで、受け渡しホイール18から搬入搬送ホイール22へ48πピッチのままで受け渡しが行われる。
【0033】
搬入搬送ホイール22では、搬送しているPETボトル6のサイズによって異なるピッチにピッチ変換をするために、PETボトル6のサイズに応じて第1変換ホイール30と第2変換ホイール32のいずれかに振り分けを行う。小型容器6Aの場合には、搬入搬送ホイール22から第1変換ホイール30に受け渡す。第1変換ホイール30も、搬入搬送ホイール22と同様に、グリッパ34が48πピッチで設けられており、搬入搬送ホイール22から第1変換ホイール30への小型容器6Aの受け渡しは48πピッチのままで行われる。小型容器6Aを受け取った第1変換ホイール30は、ピッチ変換カム44の揺動部44aによってグリッパ34を揺動させることにより、受け渡し位置Dにおいてグリッパ34に保持されている小型容器6Aの間隔が30πピッチになるように切り換える。なお、搬入搬送ホイール22は、この実施例では図1ないし図3の反時計回り方向に回転しており、そのグリッパ26が把持しているPETボトル6を第1変換ホイール30に受け渡す場合には、PETボトル6を把持しているグリッパ26が、第2変換ホイール32との受け渡し位置Cで第2変換ホイール32にPETボトル6を引き渡さずに通過しなければならないので、エアシリンダ40の作動によって切り換えカム38を前進させてグリッパ26のカムフォロア26aを押圧することによりグリッパ26の閉鎖状態を維持させる。
【0034】
第1変換ホイール30から小型容器6Aを受け渡される第1中継ホイール42は、30πピッチでグリッパ46が配置されており、30πピッチの間隔で小型容器6Aを受け取ったまま搬送し、同じく30πピッチでグリッパ60が配置されている搬出搬送ホイール58に小型容器6Aを受け渡す。第1変換ホイール30から小型容器6Aを受け取った第1中継ホイール42は、すべてのグリッパ46に小型容器6Aが把持されており、搬出搬送ホイール58もすべてのグリッパ60に小型容器6Aが保持される。
【0035】
すべてのグリッパ60に小型容器6Aが保持された搬出搬送ホイール58から、この搬出搬送ホイール58と同様に30πピッチでグリッパ(図示せず)が配置されている供給ホイール16のすべてのグリッパに小型容器6Aが受け渡される。さらに、充填機4にも30πピッチでグリッパ68が設けられており、すべてのグリッパ68に小型容器6Aが受け渡される(図4の円形容器6A参照)。
【0036】
搬入搬送ホイール22に送られてきたPETボトル6が大型容器6Bの場合には、搬入搬送ホイール22のグリッパ26から、大型容器用のルートである第2変換ホイール32に引き渡す。この場合には、搬入搬送ホイール22のグリッパ26から第2変換ホイール30のグリッパ34への引き渡しを行うので、切り換えカム38は作動させず、グリッパ26の開閉によってグリッパ48へ大型容器6Bの受け渡しを行う。第2変換ホイール32も、搬入搬送ホイール22と同様に、グリッパ48が48πピッチの間隔で設けられており、搬入搬送ホイール22から第2変換ホイール32への大型容器6Bの受け渡しは48πピッチのままで行われる。大型容器6Bを受け取った第2変換ホイール32は、ピッチ変換カム52の揺動部52aによってグリッパ48を揺動させることにより、受け渡し位置Eにおいてグリッパ48に保持されている大型容器6Bの間隔を60πピッチに切り換える。
【0037】
第2変換ホイール32から大型容器6Bを受け渡される第2中継ホイール50は、60πピッチでグリッパ54が配置されており、大型容器6Bを60πピッチの間隔で受け取ったまま搬送し、30πピッチでグリッパ60が配置されている搬出搬送ホイール58に大型容器6Bを受け渡す。第2変換ホイール32から大型容器6Bを受け取った第2中継ホイール50は、60πピッチで配置されているすべてのグリッパ54に大型容器6Bが保持されており、次に受け渡しを行う搬出搬送ホイール58は30πピッチでグリッパ60が配置されているので、搬出搬送ホイール58の一つおきのグリッパ60に大型容器6Bが引き渡される。
【0038】
搬出搬送ホイール58のグリッパ60に第2中継ホイール50から大型容器6Bが受け渡された場合には、このグリッパ60が大型容器6Bを保持した状態で第1中継ホイール42との受け渡し位置Fを通過するので、第2中継ホイール42のグリッパ46との干渉を避けなければならない。そこで、エアシリンダ66の作動によって切り換えカム64を前進させて各グリッパ46のカムフォロア46aを押圧し、グリッパ46を小型容器6Aの受け渡しを行うときよりも早く開放し、開放した状態のまま受け渡し位置Fを通過させる。
【0039】
一つおきのグリッパ60に大型容器6Bが保持された搬出搬送ホイール58から、この搬出搬送ホイール58のグリッパ60と同様に30πピッチでグリッパ(図示せず)が配置されている充填機4への供給ホイール16には、一つおきのグリッパに大型容器6Bが受け渡される。また、充填機4にも30πピッチでグリッパ68が設けられており、一つおきのグリッパ68に大型容器6Bが受け渡される(図4の角形容器6B参照)。なお、ブロー成型機はボトルを成形するための金型を備えているため、容器の搬送ピッチは充填機よりも大きく、多くの場合は2倍よりも大きい。充填機に1本ずつ連続的に、また、一つおきに容器を受け渡す場合には、ブロー成型機から充填機の2倍を越える搬送ピッチで搬出される容器の搬送ピッチを、一旦、搬出搬送手段のグリッパの配置間隔以上、かつ、2倍以下の搬送ピッチに縮小させてから、その後、搬出搬送手段と等間隔または2倍の間隔に変更しているので、特に搬出搬送手段と等間隔に変更する場合に、変更幅が大きくなりすぎず、回転搬送手段間で安定的に受け渡しを行うことができる。
【実施例2】
【0040】
前記実施例では、容器6の搬送ピッチを縮小する場合には、第1変換ホイール30と第1中継ホイール42を介して搬出搬送ホイール58に容器6を受け渡し、搬送ピッチを拡大する場合には、第2変換ホイール32と第2中継ホイール50を介して容器6を受け渡すようにしていたが、この第2実施例では、図5(a)、(b)に示すように、単一の変換ホイール130で容器の搬送ピッチを変更できるようにしている。この実施例では、変換ホイール130のグリッパ134の内周側に配置された共通カム144の、変換ホイール130から搬出搬送ホイール158への受け渡し位置Jの上下に、等間隔手段としての縮小用カム170と倍間隔手段としての拡大用カム172をそれぞれ配置している。これらのカム170、172は、切換手段としてのエアシリンダ174(拡大用カム172のエアシリンダは共通カム144の裏側に配置されている)によって進退動できるようになっている。カム170、172が前進したときには、グリッパ134のカムフォロア134aに係合してグリッパ134を揺動させる位置に移動し、後退したときには、カムフォロア134aに干渉しない位置に退避する。
【0041】
前記構成では、搬入搬送ホイール122のグリッパ126によって48πピッチの間隔で搬送されてきた容器は、変換ホイール130への受け渡し位置Hで48πの搬送ピッチのまま変換ホイール130のグリッパ134に受け渡される。容器の搬送ピッチを拡大する場合には、縮小用カム170を後退させるとともに、拡大用カム172を前進させ、受け渡し位置Jでグリッパ134の間隔が拡大するように揺動させる。グリッパ134の揺動によって把持されている容器の間隔を60πに拡大し、搬出搬送ホイール158に30πピッチの間隔で設けられているグリッパ160の一つおきに受け渡すことにより、容器の搬送間隔を60πピッチに拡大する。逆に、容器の搬送ピッチを縮小する場合には、拡大用カム172を後退させるとともに、縮小用カム170を前進させて、受け渡し位置Jでグリッパ134の間隔が接近するように揺動させる。変換ホイール130のグリッパ134に把持されている容器が30πピッチとなるようにグリッパ134を接近させた状態で、同じく30πピッチで設けられている搬出搬送ホイール158のグリッパ160に引き渡す。この実施例でも、前記第1実施例と同様の作用効果を奏することができる。なお、この実施例では、変換ホイール130から搬出搬送ホイール158に直接容器の受け渡しを行うようになっており、中継ホイールは必要としない。
【符号の説明】
【0042】
1 容器搬送装置
6 容器(PETボトル)
6A 小型容器
6B 大型容器
22 搬入搬送手段(搬入搬送ホイール)
26 搬入搬送手段のグリッパ
30 間隔変更搬送手段(第1変換ホイール)
32 間隔変更搬送手段(第2変換ホイール)
38 切換手段(切換カム)
58 搬出搬送手段(搬出搬送ホイール)
60 搬出搬送手段のグリッパ
【特許請求の範囲】
【請求項1】
内容液を収容する胴部とこの胴部よりも細い首部を有する容器を、首部を把持した吊り下げ状態で搬送する容器搬送装置であって、
首部を把持するグリッパを円周方向等間隔に配置した回転搬送手段を複数備え、異なる回転搬送手段間で容器を受け渡して搬送し、搬送する間に容器の搬送間隔を変更する容器搬送装置において、
前記複数の回転搬送手段は、上流側から容器が搬入される搬入搬送手段と、下流側へ容器を搬出する搬出搬送手段と、これら搬入搬送手段と搬出搬送手段の間に設けられて容器の搬送間隔を変更する間隔変更搬送手段とからなり、
前記搬入搬送手段のグリッパの配置間隔が、前記搬出搬送手段のグリッパの配置間隔以上、かつ、前記搬出搬送手段のグリッパの配置間隔の2倍以下であって、
前記間隔変更手段は、前記搬出搬送手段のグリッパの配置間隔の2倍の間隔で搬出搬送手段に容器を受け渡す倍間隔手段と、前記搬出搬送手段のグリッパの配置間隔と等しい間隔で搬出搬送手段に容器を受け渡す等間隔手段とを備え、
これら倍間隔手段と等間隔手段の使用を切り換える切換手段を設けたことを特徴とする容器搬送装置。
【請求項2】
前記搬入搬送手段の上流側に配置されて、前記搬出搬送手段のグリッパの配置間隔の2倍の間隔よりも大きな間隔から搬入搬送手段の配置間隔まで、容器の搬送間隔を縮小させる搬入側縮小搬送手段を備えたことを特徴とする請求項1に記載の容器搬送装置。
【請求項3】
前記倍間隔手段と等間隔手段が異なる回転搬送手段から構成され、前記切換手段は前記搬入搬送手段に設けられて、これら異なる回転搬送手段への容器の受け渡しを切り換えることを特徴とする請求項1または請求項2に記載の容器搬送装置。
【請求項4】
前記倍間隔手段と等間隔手段が単一の回転搬送手段に設けられたカムより構成され、前記切換手段はこの回転搬送手段に設けられて、これらカムの使用を切り換えることを特徴とする請求項1または請求項2に記載の容器搬送装置。
【請求項1】
内容液を収容する胴部とこの胴部よりも細い首部を有する容器を、首部を把持した吊り下げ状態で搬送する容器搬送装置であって、
首部を把持するグリッパを円周方向等間隔に配置した回転搬送手段を複数備え、異なる回転搬送手段間で容器を受け渡して搬送し、搬送する間に容器の搬送間隔を変更する容器搬送装置において、
前記複数の回転搬送手段は、上流側から容器が搬入される搬入搬送手段と、下流側へ容器を搬出する搬出搬送手段と、これら搬入搬送手段と搬出搬送手段の間に設けられて容器の搬送間隔を変更する間隔変更搬送手段とからなり、
前記搬入搬送手段のグリッパの配置間隔が、前記搬出搬送手段のグリッパの配置間隔以上、かつ、前記搬出搬送手段のグリッパの配置間隔の2倍以下であって、
前記間隔変更手段は、前記搬出搬送手段のグリッパの配置間隔の2倍の間隔で搬出搬送手段に容器を受け渡す倍間隔手段と、前記搬出搬送手段のグリッパの配置間隔と等しい間隔で搬出搬送手段に容器を受け渡す等間隔手段とを備え、
これら倍間隔手段と等間隔手段の使用を切り換える切換手段を設けたことを特徴とする容器搬送装置。
【請求項2】
前記搬入搬送手段の上流側に配置されて、前記搬出搬送手段のグリッパの配置間隔の2倍の間隔よりも大きな間隔から搬入搬送手段の配置間隔まで、容器の搬送間隔を縮小させる搬入側縮小搬送手段を備えたことを特徴とする請求項1に記載の容器搬送装置。
【請求項3】
前記倍間隔手段と等間隔手段が異なる回転搬送手段から構成され、前記切換手段は前記搬入搬送手段に設けられて、これら異なる回転搬送手段への容器の受け渡しを切り換えることを特徴とする請求項1または請求項2に記載の容器搬送装置。
【請求項4】
前記倍間隔手段と等間隔手段が単一の回転搬送手段に設けられたカムより構成され、前記切換手段はこの回転搬送手段に設けられて、これらカムの使用を切り換えることを特徴とする請求項1または請求項2に記載の容器搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−79116(P2013−79116A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−218408(P2011−218408)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000253019)澁谷工業株式会社 (503)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000253019)澁谷工業株式会社 (503)
【Fターム(参考)】
[ Back to top ]