
容器搬送設備
【課題】
野菜や果実等の収容物を収容した容器を反転装置で反転して収容物を搬送コンベアに排出するときに、収容物を均分して搬送コンベアに排出することで、後工程の収容物の選別処理をし易くすることを課題とする。
【解決手段】
上面に開口部(k1)を形成する容器(k)を外側搬送帯(20)と内側搬送帯(21)とからなる搬送帯(H)で挟持して略半円形上の周回路に沿って搬送しながら上下反転し、搬送終端側で容器(k)の開口部(k1)を下向きにする容器反転装置(S)の搬送終端側には、開口部(k1)から排出される容器(k)内の収容物(g)を受けて搬送する収容物搬送コンベア(5)と、容器反転装置(S)の搬送終端部を通過する容器(k)の有無を検出する容器有無検出手段(j)とを設け、該容器有無検出手段(j)が容器(k)を検出すると搬送帯(H)の搬送速度を減速し、その後増速する速度制御を行なう構成とする。
野菜や果実等の収容物を収容した容器を反転装置で反転して収容物を搬送コンベアに排出するときに、収容物を均分して搬送コンベアに排出することで、後工程の収容物の選別処理をし易くすることを課題とする。
【解決手段】
上面に開口部(k1)を形成する容器(k)を外側搬送帯(20)と内側搬送帯(21)とからなる搬送帯(H)で挟持して略半円形上の周回路に沿って搬送しながら上下反転し、搬送終端側で容器(k)の開口部(k1)を下向きにする容器反転装置(S)の搬送終端側には、開口部(k1)から排出される容器(k)内の収容物(g)を受けて搬送する収容物搬送コンベア(5)と、容器反転装置(S)の搬送終端部を通過する容器(k)の有無を検出する容器有無検出手段(j)とを設け、該容器有無検出手段(j)が容器(k)を検出すると搬送帯(H)の搬送速度を減速し、その後増速する速度制御を行なう構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は野菜や果実を収容した容器を搬送する設備に関する。
【背景技術】
【0002】
特許文献1には収容容器を反転させて容器内の収容物を分散用コンベアついて記載されている。
【特許文献1】特開平11−139418号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
反転装置で反転した容器の開口部から収容物が排出されるときに、排出される開始時に収容物の多くが落下排出されるため、山なり状態になって分散用コンベアに排出される。
本発明は、反転装置で反転した容器内の収容物を均分して搬送コンベアに排出することで、後工程の収容物の選別処理をし易くすることを課題とする。
【課題を解決するための手段】
【0004】
本発明は、上記課題を解決するために以下のような技術的手段を講じた。
すなわち、請求項1記載の容器搬送設備の発明は、上面に開口部(k1)を形成する容器(k)を外側搬送帯(20)と内側搬送帯(21)とからなる搬送帯(H)で挟持して略半円形上の周回路に沿って搬送しながら上下反転し、搬送終端側で容器(k)の開口部(k1)を下向きにする容器反転装置(S)の搬送終端側には、開口部(k1)から排出される容器(k)内の収容物(g)を受けて搬送する収容物搬送コンベア(5)と、容器反転装置(S)の搬送終端部を通過する容器(k)の有無を検出する容器有無検出手段(j)とを設け、該容器有無検出手段(j)が容器(k)を検出すると搬送帯(H)の搬送速度を減速し、その後増速する速度制御を行なう構成とする。
【発明の効果】
【0005】
請求項1記載の発明によると、容器kの一部が搬送帯Hの搬送終端部を通過する時に搬送帯Hの搬送速度を一旦減速することで、収容物gの排出開始時に落下排出する収容物gの数を抑制することができ、収容物搬送コンベア5上で山なり状態になるのを抑制することができる。また、搬送帯Hを減速後、徐々に増速することで、容器k内の長尺物gを均一な厚さで収容物搬送コンベア5に排出することができる。
【発明を実施するための最良の形態】
【0006】
発明を実施するための最良の形態として生産者が持ち込んだ胡瓜等の長尺物gを選別して出荷する選別出荷施設の場合について説明する。
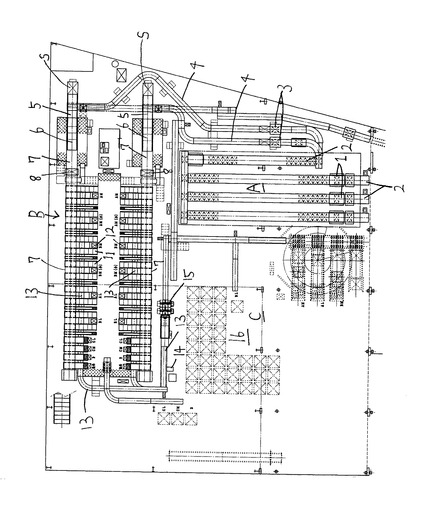
図1は選別出荷施設の全体を示す平面図である。
【0007】
選別出荷施設は荷受部Aと、選別部B、出荷部Cとを設けている。
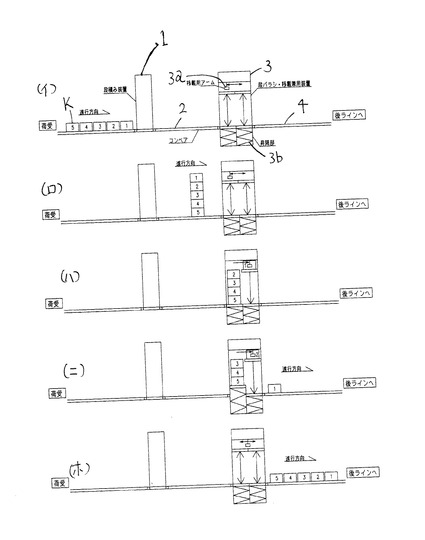
荷受部Aは生産者が持ち込んだ長尺物gを多数収容した容器kを多段に段積にする段積装置1と、荷受用コンベア2と、段積して搬送した容器kを段バラシしする段バラシ装置3と、段バラシした容器kを選別部Bへ搬送する容器搬送コンベア4とを設ける。
【0008】
選別部Bの構成について以下説明する。
容器搬送コンベア4の搬送終端側を容器反転装置Sの搬送始端部に連通し、容器反転装置Sの搬送終端部の搬送終端位置S1を収容物搬送コンベア5の搬送始端部の上方に配置する。
【0009】
収容物搬送コンベア5の搬送終端部を搬送物分散コンベア5の搬送始端部と対向する構成とし、搬送物分散コンベア6の搬送方向を収容物搬送コンベア5と同じ方向に搬送する構成とする。そして、搬送物分散コンベア6の搬送終端部と、多数のバケット7aを数珠繋ぎに構成するバケットコンベア7の始端部とを対向する構成としている。
【0010】
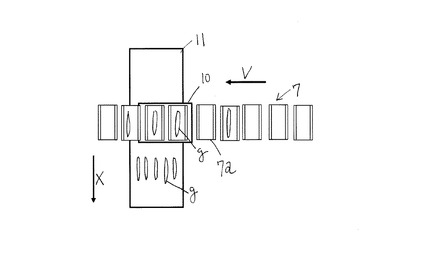
バケットコンベア7の搬送始端部にはバケット7a内部の長尺物gの表面の状態を撮像する撮像装置8を設けている。そして、バケットコンベア7の搬送途中の下方にはバケットコンベア7と同じ搬送方向Vに長尺物gを搬送し、かつ搬送方向Vに沿って前後移動する引継コンベア10を設け、引継コンベア10のさらに下方には、その長尺物gの搬送方向Xがバケットコンベア7及び引継コンベア10の搬送方向Vと交差する方向に設ける箱詰用コンベア11とを設ける。
【0011】
引継コンベア10及び箱詰用コンベア11は長尺物gの等階級毎にそれぞれ設けている。
そして、箱詰用コンベア11の搬送終端側には箱詰台12を設け、箱詰用コンベア11の下方には箱詰台12で箱詰めした出荷用の箱rを搬送する出荷用コンベア13を設けている。
【0012】
本実施例の選別部Bは2条分備えており、すなわち、容器反転装置S、収容物搬送コンベア6、バケットコンベア7、撮像装置8はそれぞれ二つずつ備えている。
出荷部Aの構成について以下説明する。
【0013】
出荷用コンベア13の途中には搬送される出荷用の箱rに商品情報を付すインクジェット14と、出荷用の箱を梱包する梱包装置15とを設け、梱包装置の近傍には梱包された出荷用の箱rを載置する商品載置場16を設けている。
【0014】
次に容器反転装置S及びその周辺の装置の構成について説明する。
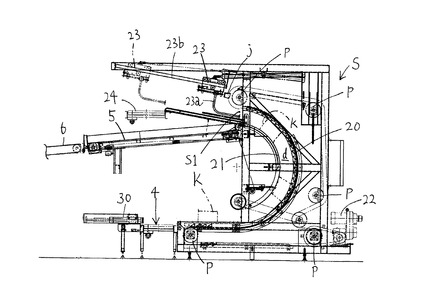
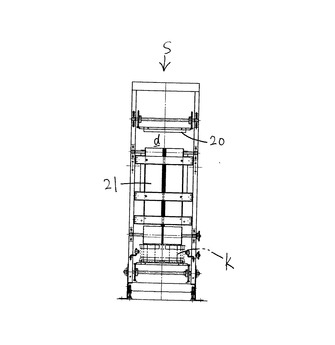
容器反転装置Sは複数のプーリpに巻回して周回する二つの搬送帯Hを設け、この搬送帯Hは、装置の外側を周回する外側搬送帯20と、装置の内側を周回する内側搬送帯21とを設ける。そして、外側搬送帯20と内側搬送帯21の対向部分をそれぞれ側面視で略半円形状に設け、容器kが挟持できる程度の間隔dを設けている。22は搬送帯Hのプーリpを回転駆動させる容器反転装置Sの駆動モータである。
【0015】
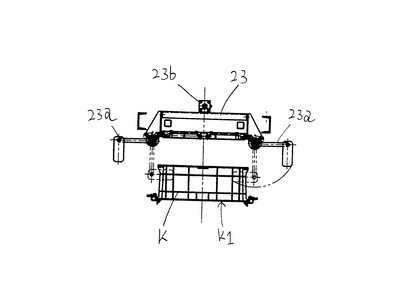
容器反転装置Sの搬送終端位置S1の近傍には容器反転装置Sの搬送終端位置S1を通過する容器kを検出する容器検出センサjと、容器反転装置Sの搬送終端位置S1から排出された容器kを排出方向の左右側方から吊り下げ部材23aで把持して吊り下げ搬送する容器保持搬送装置23と、容器保持搬送装置23で吊り下げ搬送された空の容器kを載置して荷受部Aに戻す容器戻しコンベア24とを設けている。
【0016】
次に本実施の形態の作用について、荷受から出荷まで順に説明する。
生産者が持ち込んだ胡瓜等の長尺物gを多数収容した容器kは図11の(イ)と(ロ)に示すように段積装置1で荷受けされた容器が上段になるように段積みされ、段積みされた状態で荷受け用コンベア2を搬送される。そして、図11の(ハ)と(二)に示すように段バラシ装置3の移動用アーム3aで容器kを移送し、昇降装置3bで荷受け順に容器搬送コンベアに段バラシされて載置され、図11の(ホ)に示すように容器搬送コンベア4で容器kは一つずつ選別部Bに搬送される。容器搬送コンベア4の搬送終端部に搬送された容器は容器押出装置30で容器反転装置Sの搬送始端部に順次連続して押し出される。
【0017】
容器反転装置Sの搬送始端部に供給された容器kは外側搬送帯20と内側搬送帯21とで挟持され、略半円状の周回軌跡に沿って挟持搬送され、搬送終端部になると容器kの開口部k1が下向きに反転される。そして、容器kの開口部k1が搬送終端位置S1を通過すると開口部k1が収容物搬送コンベア5と対向し、長尺物gが収容物搬送コンベア5に順次落下排出される。
【0018】
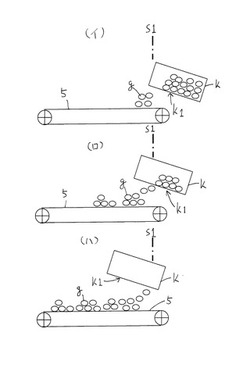
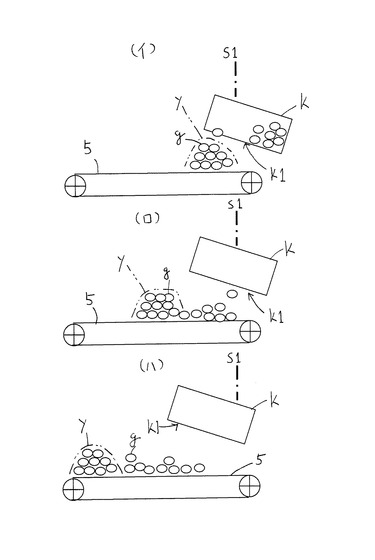
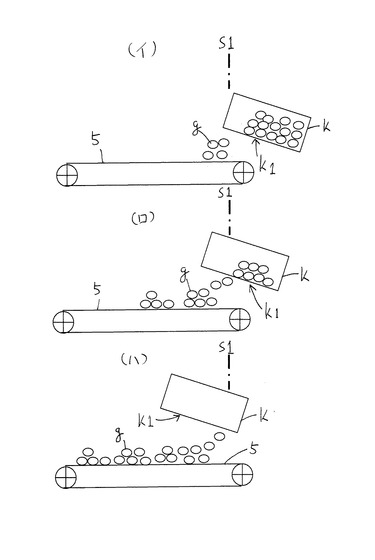
搬送帯Hの搬送終端位置S1を通過する容器kを容器検出センサjが検出すると、図10のグラフに示すように搬送帯Hの搬送速度を減速し、次いで徐々に増速してもとの速度に戻るものである。従来は、容器反転装置Sの搬送帯Hと後工程の収容物搬送コンベア5の速度はそれぞれ一定だったため、図5の(イ)に示すように容器kの開口部k1が搬送帯Hの搬送終端位置S1を通過する速度が速く、容器kの開口部k1から多くの長尺物gが排出され、排出開始時に長尺物が山なりyを形成して図5の(ロ)と(ハ)に示すように山なり状態のままで搬送されてしまうという欠点が生じていた。それに対し、本実施の形態のように容器kの一部が搬送帯Hの搬送終端位置S1を通過する時に搬送帯Hの搬送速度を一旦減速することで、図6の(イ)に示すように開口部k1が搬送終端位置S1からゆっくり通過するため、排出開始時に落下排出する長尺物gの数を抑制することができ、排出開始時の山なりを抑制することができる。また、搬送帯Hを減速後、徐々に増速することで、容器k内の長尺物gの促進を徐々に行なえ、図6の(ロ)と(ハ)に示すように容器k内の長尺物gを均一な厚さで収容物搬送コンベア5に排出することができる。
【0019】
本実施の形態の搬送帯Hの制御は、落下排出され易い排出開始直後は容器kをゆっくりと搬送終端位置S1から通過させることで長尺物gの落下排出を抑制し、長尺物gが山なりにし難くすると共に、容器k内に収容する長尺物gの本数が減る通過途中からは容器kを徐々に速く搬送終端位置S1から通過させることで長尺物の排出を徐々に促進し、長尺物gの排出開始から排出終わりまでの収容物搬送コンベア5に搬出される長尺物gの厚さを均一にしようとするものである。
【0020】
容器反転装置Sの搬送帯Hの搬送終端位置S1を通過した容器kは吊り下げ部材23aで左右両側から把持され、吊り下げ部材23aは吊り下げレール23bに沿って移動し、容器kは長尺物gを排出しながら容器戻しコンベア24まで移送される。
【0021】
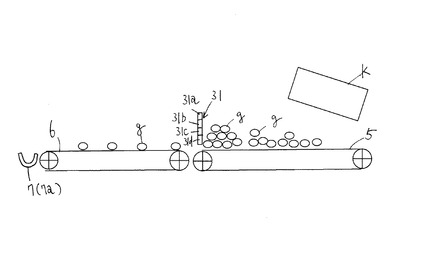
収容物搬送コンベア5の搬送始端部に落下排出された長尺物gは搬送終端部に向かって順次搬送され、次工程の搬送物分散コンベア6に供給される。搬送物分散コンベア6は収容物搬送コンベア5よりも搬送速度を速く構成しており、図7に示すように収容物搬送コンベア5で重なって搬送される長尺物gを分散して一本ずつ搬送される。
【0022】
収容物搬送コンベア5の搬送終端部の近傍には長尺物gの搬送厚さ状態を検出する長尺物センサ31で、上下方向にわたって複数の検出位置31a〜31dで長尺物gの山なり状態を検出できる。
【0023】
そして、長尺物センサ31で検出された長尺物gの搬送厚さに応じて搬送物分散コンベア6の速度を変速する構成としており、高い検出位置31aになるほど長尺物gは山なり状態と判定され、搬送物分散コンベア6の搬送速度を増速して山なり状態の長尺物gを分散して搬送し易くしている。
【0024】
本実施の形態により、収容物搬送コンベア5の搬送速度を一定にして容器反転装置Sと、搬送物分散コンベア6の搬送速度を変更制御することで、長尺物gの山なりを抑制し、後工程の選別工程を行ない易くすることができる。また、容器反転装置Sと搬送物分散コンベア6の速度制御を行ない易くすることができる。
【0025】
搬送物分散コンベア5で分散されて一本ずつ搬送された長尺物gはバケットコンベア7のバケット7aに一本ずつ供給され搬送される。バケットコンベア7で搬送される搬送途中で撮像手段8で長尺物gの表面が撮像され、その撮像情報によって当該長尺物gの等階級が判定され、所定の等階級の位置まで搬送されると、バケット7aが反転されてバケット7a内の長尺物gは引継コンベア10上に落下供給される。引継コンベア10は通常停止状態となっており、引継ぎコンベア10に所定本数の長尺物gが落下したことを検出すると、図8に示すように引継コンベア10は所定時間回転駆動を開始すると共に後退することで引継コンベア10上の長尺物gが順次箱詰用コンベア11に落下供給される。そして、引継コンベア10の回転駆動を停止して初期位置まで前進して戻ると箱詰用コンベア11が駆動を開始して長尺物gは箱詰め台12近傍まで搬送される。そして、作業者が長尺物gを出荷用の箱rに収容し、箱rを出荷用コンベア13に載置する。
【0026】
この構成により、箱詰用コンベア11には設定本数ずつの長尺物gを並列した状態で箱詰め台12に搬送することができるため、箱詰め台12で箱詰めする作業者は収容本数を把握しやすくなり、収容作業能率が向上する。
【0027】
出荷用コンベア13に載置された出荷用の箱rは出荷部Cに搬送され、搬送途中でインクジェット14で商品の情報が箱rに印字され、梱包装置15で梱包されて商品載置場16に載置される。
【産業上の利用可能性】
【0028】
本発明は胡瓜等の長尺物に関する発明であるが、長尺物以外にも根菜類等、上部を開口した容器に収容した収容物を選別する設備にも応用できる。
【図面の簡単な説明】
【0029】
【図1】選別出荷施設の平面図
【図2】容器反転装置の側面図
【図3】容器反転装置の正面図
【図4】吊り下げ搬送装置の正面図
【図5】従来の反転した容器内の収容物を排出している状態を示す図
【図6】本発明の反転した容器内の収容物を排出している状態を示す図
【図7】収容物搬送コンベアと搬送物分散コンベアの搬送状態を示す図
【図8】側面から見たバケットコンベアと引継ぎコンベアと箱詰め用コンベアを示す図
【図9】平面から見たバケットコンベアと引継ぎコンベアと箱詰め用コンベアを示す図
【図10】容器反転装置の搬送帯の搬送速度を示すグラフ
【図11】段積み装置と段バラシ装置による作用を示す図
【符号の説明】
【0030】
k1 開口部
k 容器
j 容器有無検出手段
g 収容物
H 搬送帯
S 容器反転装置
20 外側搬送帯
21 内側搬送帯
5 収容物搬送コンベア
【技術分野】
【0001】
本発明は野菜や果実を収容した容器を搬送する設備に関する。
【背景技術】
【0002】
特許文献1には収容容器を反転させて容器内の収容物を分散用コンベアついて記載されている。
【特許文献1】特開平11−139418号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
反転装置で反転した容器の開口部から収容物が排出されるときに、排出される開始時に収容物の多くが落下排出されるため、山なり状態になって分散用コンベアに排出される。
本発明は、反転装置で反転した容器内の収容物を均分して搬送コンベアに排出することで、後工程の収容物の選別処理をし易くすることを課題とする。
【課題を解決するための手段】
【0004】
本発明は、上記課題を解決するために以下のような技術的手段を講じた。
すなわち、請求項1記載の容器搬送設備の発明は、上面に開口部(k1)を形成する容器(k)を外側搬送帯(20)と内側搬送帯(21)とからなる搬送帯(H)で挟持して略半円形上の周回路に沿って搬送しながら上下反転し、搬送終端側で容器(k)の開口部(k1)を下向きにする容器反転装置(S)の搬送終端側には、開口部(k1)から排出される容器(k)内の収容物(g)を受けて搬送する収容物搬送コンベア(5)と、容器反転装置(S)の搬送終端部を通過する容器(k)の有無を検出する容器有無検出手段(j)とを設け、該容器有無検出手段(j)が容器(k)を検出すると搬送帯(H)の搬送速度を減速し、その後増速する速度制御を行なう構成とする。
【発明の効果】
【0005】
請求項1記載の発明によると、容器kの一部が搬送帯Hの搬送終端部を通過する時に搬送帯Hの搬送速度を一旦減速することで、収容物gの排出開始時に落下排出する収容物gの数を抑制することができ、収容物搬送コンベア5上で山なり状態になるのを抑制することができる。また、搬送帯Hを減速後、徐々に増速することで、容器k内の長尺物gを均一な厚さで収容物搬送コンベア5に排出することができる。
【発明を実施するための最良の形態】
【0006】
発明を実施するための最良の形態として生産者が持ち込んだ胡瓜等の長尺物gを選別して出荷する選別出荷施設の場合について説明する。
図1は選別出荷施設の全体を示す平面図である。
【0007】
選別出荷施設は荷受部Aと、選別部B、出荷部Cとを設けている。
荷受部Aは生産者が持ち込んだ長尺物gを多数収容した容器kを多段に段積にする段積装置1と、荷受用コンベア2と、段積して搬送した容器kを段バラシしする段バラシ装置3と、段バラシした容器kを選別部Bへ搬送する容器搬送コンベア4とを設ける。
【0008】
選別部Bの構成について以下説明する。
容器搬送コンベア4の搬送終端側を容器反転装置Sの搬送始端部に連通し、容器反転装置Sの搬送終端部の搬送終端位置S1を収容物搬送コンベア5の搬送始端部の上方に配置する。
【0009】
収容物搬送コンベア5の搬送終端部を搬送物分散コンベア5の搬送始端部と対向する構成とし、搬送物分散コンベア6の搬送方向を収容物搬送コンベア5と同じ方向に搬送する構成とする。そして、搬送物分散コンベア6の搬送終端部と、多数のバケット7aを数珠繋ぎに構成するバケットコンベア7の始端部とを対向する構成としている。
【0010】
バケットコンベア7の搬送始端部にはバケット7a内部の長尺物gの表面の状態を撮像する撮像装置8を設けている。そして、バケットコンベア7の搬送途中の下方にはバケットコンベア7と同じ搬送方向Vに長尺物gを搬送し、かつ搬送方向Vに沿って前後移動する引継コンベア10を設け、引継コンベア10のさらに下方には、その長尺物gの搬送方向Xがバケットコンベア7及び引継コンベア10の搬送方向Vと交差する方向に設ける箱詰用コンベア11とを設ける。
【0011】
引継コンベア10及び箱詰用コンベア11は長尺物gの等階級毎にそれぞれ設けている。
そして、箱詰用コンベア11の搬送終端側には箱詰台12を設け、箱詰用コンベア11の下方には箱詰台12で箱詰めした出荷用の箱rを搬送する出荷用コンベア13を設けている。
【0012】
本実施例の選別部Bは2条分備えており、すなわち、容器反転装置S、収容物搬送コンベア6、バケットコンベア7、撮像装置8はそれぞれ二つずつ備えている。
出荷部Aの構成について以下説明する。
【0013】
出荷用コンベア13の途中には搬送される出荷用の箱rに商品情報を付すインクジェット14と、出荷用の箱を梱包する梱包装置15とを設け、梱包装置の近傍には梱包された出荷用の箱rを載置する商品載置場16を設けている。
【0014】
次に容器反転装置S及びその周辺の装置の構成について説明する。
容器反転装置Sは複数のプーリpに巻回して周回する二つの搬送帯Hを設け、この搬送帯Hは、装置の外側を周回する外側搬送帯20と、装置の内側を周回する内側搬送帯21とを設ける。そして、外側搬送帯20と内側搬送帯21の対向部分をそれぞれ側面視で略半円形状に設け、容器kが挟持できる程度の間隔dを設けている。22は搬送帯Hのプーリpを回転駆動させる容器反転装置Sの駆動モータである。
【0015】
容器反転装置Sの搬送終端位置S1の近傍には容器反転装置Sの搬送終端位置S1を通過する容器kを検出する容器検出センサjと、容器反転装置Sの搬送終端位置S1から排出された容器kを排出方向の左右側方から吊り下げ部材23aで把持して吊り下げ搬送する容器保持搬送装置23と、容器保持搬送装置23で吊り下げ搬送された空の容器kを載置して荷受部Aに戻す容器戻しコンベア24とを設けている。
【0016】
次に本実施の形態の作用について、荷受から出荷まで順に説明する。
生産者が持ち込んだ胡瓜等の長尺物gを多数収容した容器kは図11の(イ)と(ロ)に示すように段積装置1で荷受けされた容器が上段になるように段積みされ、段積みされた状態で荷受け用コンベア2を搬送される。そして、図11の(ハ)と(二)に示すように段バラシ装置3の移動用アーム3aで容器kを移送し、昇降装置3bで荷受け順に容器搬送コンベアに段バラシされて載置され、図11の(ホ)に示すように容器搬送コンベア4で容器kは一つずつ選別部Bに搬送される。容器搬送コンベア4の搬送終端部に搬送された容器は容器押出装置30で容器反転装置Sの搬送始端部に順次連続して押し出される。
【0017】
容器反転装置Sの搬送始端部に供給された容器kは外側搬送帯20と内側搬送帯21とで挟持され、略半円状の周回軌跡に沿って挟持搬送され、搬送終端部になると容器kの開口部k1が下向きに反転される。そして、容器kの開口部k1が搬送終端位置S1を通過すると開口部k1が収容物搬送コンベア5と対向し、長尺物gが収容物搬送コンベア5に順次落下排出される。
【0018】
搬送帯Hの搬送終端位置S1を通過する容器kを容器検出センサjが検出すると、図10のグラフに示すように搬送帯Hの搬送速度を減速し、次いで徐々に増速してもとの速度に戻るものである。従来は、容器反転装置Sの搬送帯Hと後工程の収容物搬送コンベア5の速度はそれぞれ一定だったため、図5の(イ)に示すように容器kの開口部k1が搬送帯Hの搬送終端位置S1を通過する速度が速く、容器kの開口部k1から多くの長尺物gが排出され、排出開始時に長尺物が山なりyを形成して図5の(ロ)と(ハ)に示すように山なり状態のままで搬送されてしまうという欠点が生じていた。それに対し、本実施の形態のように容器kの一部が搬送帯Hの搬送終端位置S1を通過する時に搬送帯Hの搬送速度を一旦減速することで、図6の(イ)に示すように開口部k1が搬送終端位置S1からゆっくり通過するため、排出開始時に落下排出する長尺物gの数を抑制することができ、排出開始時の山なりを抑制することができる。また、搬送帯Hを減速後、徐々に増速することで、容器k内の長尺物gの促進を徐々に行なえ、図6の(ロ)と(ハ)に示すように容器k内の長尺物gを均一な厚さで収容物搬送コンベア5に排出することができる。
【0019】
本実施の形態の搬送帯Hの制御は、落下排出され易い排出開始直後は容器kをゆっくりと搬送終端位置S1から通過させることで長尺物gの落下排出を抑制し、長尺物gが山なりにし難くすると共に、容器k内に収容する長尺物gの本数が減る通過途中からは容器kを徐々に速く搬送終端位置S1から通過させることで長尺物の排出を徐々に促進し、長尺物gの排出開始から排出終わりまでの収容物搬送コンベア5に搬出される長尺物gの厚さを均一にしようとするものである。
【0020】
容器反転装置Sの搬送帯Hの搬送終端位置S1を通過した容器kは吊り下げ部材23aで左右両側から把持され、吊り下げ部材23aは吊り下げレール23bに沿って移動し、容器kは長尺物gを排出しながら容器戻しコンベア24まで移送される。
【0021】
収容物搬送コンベア5の搬送始端部に落下排出された長尺物gは搬送終端部に向かって順次搬送され、次工程の搬送物分散コンベア6に供給される。搬送物分散コンベア6は収容物搬送コンベア5よりも搬送速度を速く構成しており、図7に示すように収容物搬送コンベア5で重なって搬送される長尺物gを分散して一本ずつ搬送される。
【0022】
収容物搬送コンベア5の搬送終端部の近傍には長尺物gの搬送厚さ状態を検出する長尺物センサ31で、上下方向にわたって複数の検出位置31a〜31dで長尺物gの山なり状態を検出できる。
【0023】
そして、長尺物センサ31で検出された長尺物gの搬送厚さに応じて搬送物分散コンベア6の速度を変速する構成としており、高い検出位置31aになるほど長尺物gは山なり状態と判定され、搬送物分散コンベア6の搬送速度を増速して山なり状態の長尺物gを分散して搬送し易くしている。
【0024】
本実施の形態により、収容物搬送コンベア5の搬送速度を一定にして容器反転装置Sと、搬送物分散コンベア6の搬送速度を変更制御することで、長尺物gの山なりを抑制し、後工程の選別工程を行ない易くすることができる。また、容器反転装置Sと搬送物分散コンベア6の速度制御を行ない易くすることができる。
【0025】
搬送物分散コンベア5で分散されて一本ずつ搬送された長尺物gはバケットコンベア7のバケット7aに一本ずつ供給され搬送される。バケットコンベア7で搬送される搬送途中で撮像手段8で長尺物gの表面が撮像され、その撮像情報によって当該長尺物gの等階級が判定され、所定の等階級の位置まで搬送されると、バケット7aが反転されてバケット7a内の長尺物gは引継コンベア10上に落下供給される。引継コンベア10は通常停止状態となっており、引継ぎコンベア10に所定本数の長尺物gが落下したことを検出すると、図8に示すように引継コンベア10は所定時間回転駆動を開始すると共に後退することで引継コンベア10上の長尺物gが順次箱詰用コンベア11に落下供給される。そして、引継コンベア10の回転駆動を停止して初期位置まで前進して戻ると箱詰用コンベア11が駆動を開始して長尺物gは箱詰め台12近傍まで搬送される。そして、作業者が長尺物gを出荷用の箱rに収容し、箱rを出荷用コンベア13に載置する。
【0026】
この構成により、箱詰用コンベア11には設定本数ずつの長尺物gを並列した状態で箱詰め台12に搬送することができるため、箱詰め台12で箱詰めする作業者は収容本数を把握しやすくなり、収容作業能率が向上する。
【0027】
出荷用コンベア13に載置された出荷用の箱rは出荷部Cに搬送され、搬送途中でインクジェット14で商品の情報が箱rに印字され、梱包装置15で梱包されて商品載置場16に載置される。
【産業上の利用可能性】
【0028】
本発明は胡瓜等の長尺物に関する発明であるが、長尺物以外にも根菜類等、上部を開口した容器に収容した収容物を選別する設備にも応用できる。
【図面の簡単な説明】
【0029】
【図1】選別出荷施設の平面図
【図2】容器反転装置の側面図
【図3】容器反転装置の正面図
【図4】吊り下げ搬送装置の正面図
【図5】従来の反転した容器内の収容物を排出している状態を示す図
【図6】本発明の反転した容器内の収容物を排出している状態を示す図
【図7】収容物搬送コンベアと搬送物分散コンベアの搬送状態を示す図
【図8】側面から見たバケットコンベアと引継ぎコンベアと箱詰め用コンベアを示す図
【図9】平面から見たバケットコンベアと引継ぎコンベアと箱詰め用コンベアを示す図
【図10】容器反転装置の搬送帯の搬送速度を示すグラフ
【図11】段積み装置と段バラシ装置による作用を示す図
【符号の説明】
【0030】
k1 開口部
k 容器
j 容器有無検出手段
g 収容物
H 搬送帯
S 容器反転装置
20 外側搬送帯
21 内側搬送帯
5 収容物搬送コンベア
【特許請求の範囲】
【請求項1】
上面に開口部(k1)を形成する容器(k)を外側搬送帯(20)と内側搬送帯(21)とからなる搬送帯(H)で挟持して略半円形上の周回路に沿って搬送しながら上下反転し、搬送終端側で容器(k)の開口部(k1)を下向きにする容器反転装置(S)の搬送終端側には、開口部(k1)から排出される容器(k)内の収容物(g)を受けて搬送する収容物搬送コンベア(5)と、容器反転装置(S)の搬送終端部を通過する容器(k)の有無を検出する容器有無検出手段(j)とを設け、該容器有無検出手段(j)が容器(k)を検出すると搬送帯(H)の搬送速度を減速し、その後増速する速度制御を行なう容器搬送設備。
【請求項1】
上面に開口部(k1)を形成する容器(k)を外側搬送帯(20)と内側搬送帯(21)とからなる搬送帯(H)で挟持して略半円形上の周回路に沿って搬送しながら上下反転し、搬送終端側で容器(k)の開口部(k1)を下向きにする容器反転装置(S)の搬送終端側には、開口部(k1)から排出される容器(k)内の収容物(g)を受けて搬送する収容物搬送コンベア(5)と、容器反転装置(S)の搬送終端部を通過する容器(k)の有無を検出する容器有無検出手段(j)とを設け、該容器有無検出手段(j)が容器(k)を検出すると搬送帯(H)の搬送速度を減速し、その後増速する速度制御を行なう容器搬送設備。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】

【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−78841(P2009−78841A)
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願番号】特願2007−249535(P2007−249535)
【出願日】平成19年9月26日(2007.9.26)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願日】平成19年9月26日(2007.9.26)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]