
容器洗浄装置
【課題】1.8リットルびんのような重量のある容器4を、正確に位置決めして安定した姿勢で反転させる。
【解決手段】容器4を供給する搬送コンベヤ2の側方に容器反転手段14が配置されている。反転手段14は、回転軸24に取り付けられ、容器4の首部4aを掴むグリッパ26および容器4の胴部2bに当接して支持する支持ガイド16と、回転軸24を回転する駆動モーター50を備えている。グリッパ26は開閉式で、容器4の首部4aを両側からグリップする。また、支持ガイド16の向かい側にセンタリングガイド18が設けられている。搬送コンベヤ2によって搬送されてきた容器4を、回転してきた支持ガイド16と前進したセンタリングガイド18によって挟持して停止させ、グリッパ26によって容器4の首部4aを把持する。グリッパ26と支持ガイド16が一体的に回転して容器4を反転させる。
【解決手段】容器4を供給する搬送コンベヤ2の側方に容器反転手段14が配置されている。反転手段14は、回転軸24に取り付けられ、容器4の首部4aを掴むグリッパ26および容器4の胴部2bに当接して支持する支持ガイド16と、回転軸24を回転する駆動モーター50を備えている。グリッパ26は開閉式で、容器4の首部4aを両側からグリップする。また、支持ガイド16の向かい側にセンタリングガイド18が設けられている。搬送コンベヤ2によって搬送されてきた容器4を、回転してきた支持ガイド16と前進したセンタリングガイド18によって挟持して停止させ、グリッパ26によって容器4の首部4aを把持する。グリッパ26と支持ガイド16が一体的に回転して容器4を反転させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、容器洗浄装置に係り、特に、搬送コンベヤ上を起立した状態で供給されてくる容器を停止させ、その位置で反転させ倒立状態にして洗浄を行った後、再び反転させて起立した状態に戻して前記搬送コンベヤによって排出する容器洗浄装置に関するものである。
【背景技術】
【0002】
特許文献1には、停止した容器を反転させて倒立状態で洗浄を行った後、再び起立した状態に戻して排出する容器洗浄装置が記載されている。この特許文献1に記載された容器洗浄装置の構成について簡単に説明する。この容器洗浄装置では、容器を給びんテーブル上に配列し、昇降台の下降に伴うグリッパの下降によって、各グリッパの把持用パッドを容器のびん口に嵌合する。そして、把持用パッドに圧縮空気を供給して膨らまし、容器のびん口を抜け落ちないように把持する。その後、電動モーターを駆動してアームを回動し、グリッパが把持している容器を倒立状態にする。すると、容器のびん口が洗浄水噴出ノズルに対向する位置にくる。この状態で洗浄水噴出ノズルから洗浄水を噴出し、容器内を洗浄する。続いて、駆動モータを前記回動方向と反対方向に駆動することによりアームを回動させて、容器を再び起立した状態に戻し、前記把持用パッドから空気を排出して容器のびん口の把持状態を解除して搬送コンベヤにより排出するようになっている。
【特許文献1】特許第2852024号公報(第4−6頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0003】
前記引用文献1に記載されている容器洗浄装置では、1.8リットルびん等の重量のある容器の首部だけをグリップして反転させようとすると、横にずれる等によりうまく反転できないおそれがある。また、グリッパがリング状であるため、上方から被せて把持しなければならず、垂直方向に昇降する昇降機構が必要である。さらに、グリッパだけでなく洗浄部も昇降させており、装置全体が大型化してしまうという問題がある。
【課題を解決するための手段】
【0004】
本発明は、容器を起立状態で供給する搬送コンベヤと、この搬送コンベヤを駆動する駆動手段と、この搬送コンベヤの側方に配置され、供給されてくる容器を反転させる反転手段と、反転された容器に洗浄水を吹き付ける洗浄手段と、搬送コンベヤによって供給されてくる容器の胴部に係合して位置決めを行うセンタリングガイドと、このセンタリングガイドを進退動させる進退動手段とを備え、前記反転手段が、容器の首部を把持するグリッパと、容器の胴部を支持する支持ガイドと、前記グリッパおよび支持ガイドを回転させる回転駆動手段とを備え、搬送コンベヤによって供給されてくる容器をセンタリングガイドで位置決めした後、この容器の首部をグリッパで把持するとともに、胴部を支持ガイドで支持しつつ回転駆動手段によって反転させて洗浄することを特徴とするものである。
【発明の効果】
【0005】
本発明の容器洗浄装置では、構造が簡単でコンパクトな装置にもかかわらず、1.8リットルびん等の重量のある容器でも、正確に位置決めして、安定した状態で反転させることができる。
【発明を実施するための最良の形態】
【0006】
容器の首部をグリップするグリッパと、胴部を支持する支持ガイドとこれらグリッパおよび支持ガイドを回転させる回転駆動手段とを有する反転手段を備えており、搬送コンベヤによって搬送されてくる容器をセンタリングガイドで位置決めをした後、グリッパで容器の首部を掴み、かつ、胴部を支持ガイドで支持し、回転駆動手段により反転させて洗浄を行うという構成で、重量の大きい容器でも正確に反転させるという目的を達成することができる。
【実施例1】
【0007】
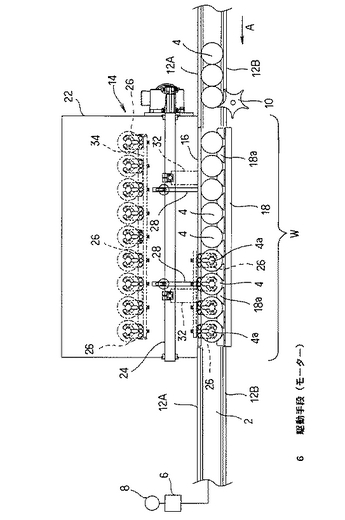
以下、図面に示す実施例により本発明を説明する。図1は本発明の一実施例に係る容器洗浄装置の平面図、図2はこの容器洗浄装置に設けられた反転手段の側面図、図3は反転手段の構成を簡略化して示す図である。図において、2は上流側(図1の右方)から起立した状態の容器4を一列で搬送してこの容器洗浄装置の洗浄ポジションWに供給する搬送コンベヤである。搬送コンベヤ2は、モーター6によって駆動されて図1の矢印A方向に走行する。この搬送コンベヤ2にはエンコーダー8が接続されており、このエンコーダ8からのパルス信号をカウントすることにより、前記洗浄ポジションWに容器4が供給されたことを確認して、後に説明するセンタリングガイド等を作動させる。搬送コンベヤ2の側部の、洗浄ポジションWよりも上流側にロータリーストッパ10が配置されており、一列で搬送されてきた容器4から所定個数(一回に洗浄される容器4の数)の容器4を切り離して洗浄ポジションWに供給する。
【0008】
前記搬送コンベヤ2上の両側には、一列で搬送される容器4の両側部を案内するガイド部材12A、12Bが配置されている。
【0009】
前記洗浄ポジションWの搬送コンベヤ2の側方に、容器4を保持して反転させる容器反転手段(全体として符号14で示す)が設けられている。前記ガイド部材12A、12Bよりもやや上方の、この容器反転手段14側(図1の上方)に、容器4の胴部4bに当接して支持するボトル支持ガイド16が、そして、その向かい側に搬送コンベヤ2方向に向けて進退動可能なセンタリングガイド18が配置されている。なお、図2では、容器反転手段14側のガイド部材12Aの図示を省略し、センタリングガイド12側のガイド部材12Bのみを示している。また、この実施例では、洗浄ポジションWにもガイド部材12A、12Bを配置しているが、この部分はボトル支持ガイド16とセンタリングガイド18を設けているので、ガイド部材12A、12Bを省略することもできる。
【0010】
センタリングガイド18は、スライド用シリンダ20のピストンロッド20aに取り付けられており(図2参照)、搬送コンベヤ2上の容器4に当接する位置(図1ないし図2に示す位置)と、当接しない位置とに進退動できるようになっている。センタリングガイド18の前面側(搬送コンベヤ2側)には、容器4の胴部4b外面の形状に合致したパッド18aが取り付けられており、前進して容器4に前記パッド18aを当接させることにより、これら容器4を正確に位置決めすることができる。
【0011】
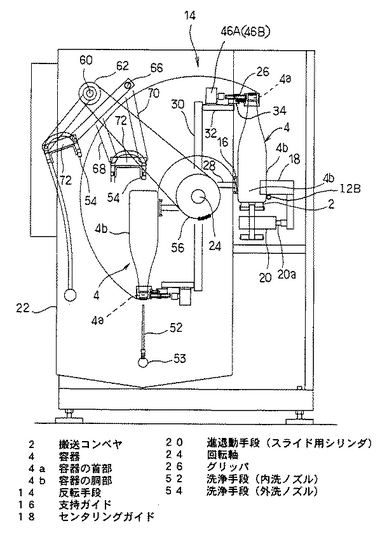
次に、容器反転手段14の構成について説明する。容器反転手段14は、フレーム22の両側壁に回転自在に支持された回転軸24と、この回転軸24に取り付けられて一体的に回転する前記ボトル支持ガイド16および後に説明するグリッパ26(図4および図5参照)とを備えている。回転軸24は前記搬送コンベヤ2と平行に配置されている。回転軸24には、この回転軸24と直交する2本の平行なロッド28が搬送コンベヤ2方向を向けて取付けられ、これら2本の取り付けロッド28の先端に前記ボトル支持ガイド16が固定されている。このボトル支持ガイド16は、搬送コンベヤ2上の容器4に当接して支持した状態(図1ないし図3に示す状態)では、取り付けロッド28が水平で、ボトル支持ガイド16の前面が垂直になっている。
【0012】
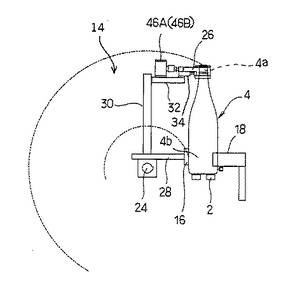
また、回転軸24には、前記取り付けロッド28と直角な2本の支柱30が固定され、これら支柱30の回転端(図2および図3の状態では上端)に支柱30と直角な2枚の支持プレート32が固定されている。この支持プレート32の先端側に搬送コンベヤ2と平行なグリッパ取付ベース34が固定され、この取付ベース34上に複数のグリッパ26が取り付けられている。これらグリッパ26は、1回に洗浄される容器4の数と同じ数(この実施例では9個)だけ、センタリングガイド18により位置決めされた容器4の首部4aの間隔と同じ間隔で配置されている。
【0013】
各グリッパ26は、図5に示すように、前記グリッパ取付ベース34上に支点ピン36A、36Bを介して回動自在に支持された一対の開閉アーム38A、38Bを備えている。両開閉アーム38A、38Bの中間部に、前記取付ベース34の後方側からシャフト44が進退動可能に挿入され、その先端部上にローラ41が取り付けられている。シャフト44の先端面と取付ベース34側のばね座(図示せず)との間にスプリング40が挿入され、前記シャフト44を後方側へ向かって常時付勢している。
【0014】
両開閉アーム38A、38Bの基部側(支点ピン36A、36B側)に略円弧状の凹部が形成され、この凹部内に前記ローラ41が嵌合しており、スプリング40を撓めてシャフト44を押し込んで、このローラ41を前進させると、前記凹部の前面側(図5の下側)を押圧して強制的に開閉アーム38A、38Bを外方に回転させて開放する(図5の右側の状態を参照)。また、スプリング40を押圧する力を除くと、シャフト44がスプリング40に押し戻されて、ローラ41が前記凹部の背面側を押圧して開閉アーム38A、38Bを閉じるようになっている。前記各グリッパ26のシャフト44は、通常はスプリング40に押されて後端部44aが、取付ベース34の後方に突出しており、この部分44aを前方へ押圧すると、シャフト44が前進してスプリング40を撓め、両開閉アーム38A、38Bを開放する。
【0015】
前記支持プレート32上に、グリッパ開閉用の一対のシリンダ46A、46Bが固定されている。これら両開閉用シリンダ46A、46Bのピストンロッドの先端に、前記回転軸24と平行な押圧プレート48が固定されている。この押圧プレート48は、開閉用シリンダ46A、46Bの非作動時には、前記シャフト44の後端部44aよりも僅かに後方に位置しており、その状態では、シャフト44がスプリング40に押されて後退しているので、両開閉アーム38A、38Bが閉じている。また、開閉用シリンダ46が作動すると、押圧プレート48が前進し、シャフト44を押し込んでスプリング40を圧縮し両開閉アーム38A、38Bを開放する。
【0016】
両開閉アーム38A、38Bの先端部寄りに、内面にそれぞれ2個所の保持部42Aa、42Ab、42Ba、42Bbを有するほぼ円弧状のパッド42A、42Bが取り付けられており、両開閉アーム38A、38Bが閉じると、両側のパッド42A、42Bに設けられている4個所の保持部42Aa、42Ab、42Ba、42Bbによって容器4の首部4aを保持するようになっている(図5の左側の状態を参照)。
【0017】
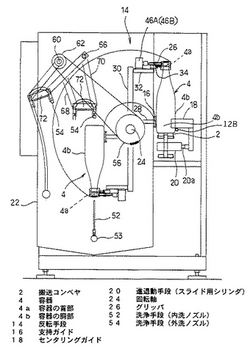
グリッパ26およびボトル支持ガイド16が取り付けられている回転軸24は、モータ(回転駆動手段)50(図6参照)により回転駆動されるようになっており、各グリッパ26が搬送コンベヤ2上に起立している容器4の首部4aを把持するとともに、ボトル支持ガイド16がその容器4の胴部4bに当接して支持する位置、つまり、図2の右上部に示す位置と、容器4を反転させて倒立状態にした位置、つまり、図2の左下に示す位置との間で回転するようになっている。これらグリッパ26、ボトル支持ガイド16、回転軸24およびこの回転軸24を回転駆動するモーター50等により容器反転手段14が構成されている。なお、この実施例では、回転軸24の中心がセンタリングガイド18の下端よりも低い位置に配置されている(図2および図3参照)。このような配置にしたことにより、グリッパ26とボトル支持ガイド16によって支持した容器4を、センタリングガイド18を前進させた状態のまま回転させることができる。
【0018】
前記容器反転手段14によって倒立状態になった各容器4の口部と向かい合う位置に、直立した状態の内洗ノズル(洗浄手段)52が吐出口を上に向けて配置されている(図6参照)。これら内洗ノズル52には、洗浄水供給管53から洗浄水が供給されて容器4内に吹き込まれ、この容器4の内部を洗浄する。
【0019】
また、外洗ノズル(洗浄手段)54は、倒立した状態の容器4の底部上方から洗浄水を吹き付けるようになっており、反転する容器4に干渉しないように、容器4の回転に連動して洗浄位置と退避位置とに移動できるようになっている。前記回転軸24の一方の端部(図6の左端)寄りに、スプロケット56が嵌合している。このスプロケット56は、間欠カムを用いた減速機構58を介して回転軸24の回転を伝達されて回転する。回転軸24の上方の、前記搬送コンベヤ2から遠い側(図2の左側)に、回転軸24と平行な支点軸60が回転自在に支持されており、この支点軸60にスプロケット62が固定されている。前記回転軸24のスプロケット56とこの支点軸60のスプロケット62との間にチェーン64が掛け回されており、このチェーン64を介して前記回転軸24の回転を支点軸60に伝達する。
【0020】
上方の支点軸60の近くに、この支点軸60と平行な従動軸66が回転自在に支持されている。支点軸60と従動軸66にそれぞれ2本のリンク68、70が連結され、これらリンク68、70の先端に、外洗ノズル54を取り付けた取付ブロック72が連結されている。前記回転軸24の回転を、スプロケット56およびチェーン64を介して支点軸60に伝えると、この支点軸60と従動軸66にそれぞれ連結されたリンク68、70、およびその先端に連結された取付ブロック72が回動し、外洗ノズル54の先端が、倒立した状態の容器4の底面中央部に向かい合う位置と、容器4が回転移動する軌跡の外側に退避した位置との間で移動する。このように外洗ノズル54を移動可能にしたことにより、外洗ノズル54を容器4の底部に接近させ、洗浄水を拡散させずに容器4に吹き付けることができ、洗浄水のロスを無くすことができる。
【0021】
以上の構成に係る容器洗浄装置の作動について説明する。搬送コンベヤ2によって上流側から搬送されてきた容器4が、ロータリーストッパ10によって所定個数(この実施例では9個)ずつ切り離されて、洗浄ポジションWに供給される。搬送コンベヤ2の駆動モーター6にエンコーダ8が設けられており、このエンコーダ8からのパルス数が所定数カウントされると、所定個数の容器4が洗浄ポジションWに供給されたと判断して、スライド用シリンダ20を作動させてセンタリングガイド18を搬送コンベヤ2方向に前進させる。
【0022】
容器4が洗浄ポジションWに供給されるときには、容器反転手段14のグリッパ26およびボトル支持ガイド16は、容器4と干渉しないように後方(図2の左方向)に約10度ほど傾斜した状態になっており、前記センタリングガイド18が前進するタイミングに合わせて搬送コンベヤ2側に向けて回転させる。前記センタリングガイド18とボトル支持ガイド16によって容器4の胴部4bを両側から挟持して、走行している搬送コンベヤ2上で容器4を停止させるとともに、正確に位置決めする。
【0023】
前記ボトル支持ガイド16とグリッパ26は回転軸24に取り付けられて一体的に回転するようになっており、ボトル支持ガイド16が搬送コンベヤ2上の容器4に当接したときには、グリッパ26が容器4の4a上に移動している。このときには、グリッパ26の両開閉アーム38A、38Bが開放した状態になっており、容器4の首部4aの両側に位置している。この位置で、開閉用シリンダ46A、46Bのピストンロッドを収縮させると、押圧プレート48が後退してシャフト44がスプリング40により後方へ押し出され、両開閉アーム38A、38Bが閉じて容器4の首部4aをグリップする。
【0024】
次に、回転軸24をモーター50により回転させてグリッパ26およびボトル支持ガイド16を、図2の反時計回り方向へ回転させる。すると、回転軸24が180度回転して、搬送コンベヤ2上で起立していた容器4が倒立した状態になる。容器4の首部4aをグリッパ26によって把持するとともに、容器4の胴部4bをボトル支持ガイド16によって支持しつつ、この容器4を反転させるので、1.8リットルびんのような重量のある容器4でも、正確に位置決めし安定した状態で反転させることができる。
【0025】
搬送コンベヤ2上の容器4をグリッパ26が把持した時点では、外洗ノズル54がこの容器4の回転する軌跡の外側に位置しているが、回転軸24の回転によりグリッパ26およびボトル支持ガイド16が容器4を反転させるのに連動して、外洗ノズル54が移動する。この外洗ノズル54は、回転軸24の回転を減速機構58によって減速して伝達される支点軸60と、この支点軸60と平行な従動軸66にそれぞれ連結された2本の長いリンク68、70の先端部間に取り付けられており、倒立状態になった容器4の底面の中央に向かい合う位置に移動する。
【0026】
倒立状態の容器4の下方側から内洗ノズル52により容器4内に洗浄水を吹き込むとともに、外洗ノズル54によって容器4の底面に上方側から洗浄水を吹き付けて、この容器4の内外を洗浄する。洗浄後、水切りを行った後、回転軸24を前記反転時と逆に180度回転させて容器4を起立状態にして搬送コンベヤ2上に戻す。搬送コンベヤ2は駆動を続けており、この搬送コンベヤ2上に戻された容器4は、ボトル支持ガイド16とセンタリングガイド18の間に挟持されるとともに、グリッパ26によって首部4aを把持されて搬送コンベヤ2上に停止している。この状態から、グリッパ開閉用シリンダ46A、46Bを作動させて押圧プレート48を前進させ、シャフト44を押し込んでスプリング40を圧縮し、両開閉アーム38A、38Bを開放する。その後、回転軸24を回転させて、グリッパ26およびボトル支持ガイド16を後方に傾斜させて容器4と干渉しない位置に移動させるとともに、スライド用シリンダ20を作動させてセンタリングガイド18を後退させる。
【0027】
グリッパ36、ボトル支持ガイド16およびセンタリングガイド18から解放された洗浄済みの容器4は、洗浄ポジションWから下流側に送られる。容器4が洗浄ポジションWから排出されるとともに、ロータリストッパ10によって停止されていた待機中の次の容器4が、導入を開始し、洗浄ポジションWに供給され、同様の工程が行われる。
【図面の簡単な説明】
【0028】
【図1】容器洗浄装置の平面図である。(実施例1)
【図2】前記容器洗浄装置に設けられた容器反転手段の側面図である。
【図3】搬送コンベヤ上に容器を停止させた状態を簡略化して示す側面図である。
【図4】グリッパの平面図である。
【図5】グリッパを拡大して示す平面図である。
【図6】前記容器洗浄装置に設けられた容器反転手段および洗浄手段の正面図である。
【符号の説明】
【0029】
2 搬送コンベヤ
4 容器
4a 容器の首部
4b 容器の胴部
6 駆動手段(モーター)
14 反転手段
16 支持ガイド
18 センタリングガイド
20 進退動手段(スライド用シリンダ)
24 回転軸
26 グリッパ
50 回転駆動手段(モーター)
52 洗浄手段(内洗ノズル)
54 洗浄手段(外洗ノズル)
【技術分野】
【0001】
本発明は、容器洗浄装置に係り、特に、搬送コンベヤ上を起立した状態で供給されてくる容器を停止させ、その位置で反転させ倒立状態にして洗浄を行った後、再び反転させて起立した状態に戻して前記搬送コンベヤによって排出する容器洗浄装置に関するものである。
【背景技術】
【0002】
特許文献1には、停止した容器を反転させて倒立状態で洗浄を行った後、再び起立した状態に戻して排出する容器洗浄装置が記載されている。この特許文献1に記載された容器洗浄装置の構成について簡単に説明する。この容器洗浄装置では、容器を給びんテーブル上に配列し、昇降台の下降に伴うグリッパの下降によって、各グリッパの把持用パッドを容器のびん口に嵌合する。そして、把持用パッドに圧縮空気を供給して膨らまし、容器のびん口を抜け落ちないように把持する。その後、電動モーターを駆動してアームを回動し、グリッパが把持している容器を倒立状態にする。すると、容器のびん口が洗浄水噴出ノズルに対向する位置にくる。この状態で洗浄水噴出ノズルから洗浄水を噴出し、容器内を洗浄する。続いて、駆動モータを前記回動方向と反対方向に駆動することによりアームを回動させて、容器を再び起立した状態に戻し、前記把持用パッドから空気を排出して容器のびん口の把持状態を解除して搬送コンベヤにより排出するようになっている。
【特許文献1】特許第2852024号公報(第4−6頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0003】
前記引用文献1に記載されている容器洗浄装置では、1.8リットルびん等の重量のある容器の首部だけをグリップして反転させようとすると、横にずれる等によりうまく反転できないおそれがある。また、グリッパがリング状であるため、上方から被せて把持しなければならず、垂直方向に昇降する昇降機構が必要である。さらに、グリッパだけでなく洗浄部も昇降させており、装置全体が大型化してしまうという問題がある。
【課題を解決するための手段】
【0004】
本発明は、容器を起立状態で供給する搬送コンベヤと、この搬送コンベヤを駆動する駆動手段と、この搬送コンベヤの側方に配置され、供給されてくる容器を反転させる反転手段と、反転された容器に洗浄水を吹き付ける洗浄手段と、搬送コンベヤによって供給されてくる容器の胴部に係合して位置決めを行うセンタリングガイドと、このセンタリングガイドを進退動させる進退動手段とを備え、前記反転手段が、容器の首部を把持するグリッパと、容器の胴部を支持する支持ガイドと、前記グリッパおよび支持ガイドを回転させる回転駆動手段とを備え、搬送コンベヤによって供給されてくる容器をセンタリングガイドで位置決めした後、この容器の首部をグリッパで把持するとともに、胴部を支持ガイドで支持しつつ回転駆動手段によって反転させて洗浄することを特徴とするものである。
【発明の効果】
【0005】
本発明の容器洗浄装置では、構造が簡単でコンパクトな装置にもかかわらず、1.8リットルびん等の重量のある容器でも、正確に位置決めして、安定した状態で反転させることができる。
【発明を実施するための最良の形態】
【0006】
容器の首部をグリップするグリッパと、胴部を支持する支持ガイドとこれらグリッパおよび支持ガイドを回転させる回転駆動手段とを有する反転手段を備えており、搬送コンベヤによって搬送されてくる容器をセンタリングガイドで位置決めをした後、グリッパで容器の首部を掴み、かつ、胴部を支持ガイドで支持し、回転駆動手段により反転させて洗浄を行うという構成で、重量の大きい容器でも正確に反転させるという目的を達成することができる。
【実施例1】
【0007】
以下、図面に示す実施例により本発明を説明する。図1は本発明の一実施例に係る容器洗浄装置の平面図、図2はこの容器洗浄装置に設けられた反転手段の側面図、図3は反転手段の構成を簡略化して示す図である。図において、2は上流側(図1の右方)から起立した状態の容器4を一列で搬送してこの容器洗浄装置の洗浄ポジションWに供給する搬送コンベヤである。搬送コンベヤ2は、モーター6によって駆動されて図1の矢印A方向に走行する。この搬送コンベヤ2にはエンコーダー8が接続されており、このエンコーダ8からのパルス信号をカウントすることにより、前記洗浄ポジションWに容器4が供給されたことを確認して、後に説明するセンタリングガイド等を作動させる。搬送コンベヤ2の側部の、洗浄ポジションWよりも上流側にロータリーストッパ10が配置されており、一列で搬送されてきた容器4から所定個数(一回に洗浄される容器4の数)の容器4を切り離して洗浄ポジションWに供給する。
【0008】
前記搬送コンベヤ2上の両側には、一列で搬送される容器4の両側部を案内するガイド部材12A、12Bが配置されている。
【0009】
前記洗浄ポジションWの搬送コンベヤ2の側方に、容器4を保持して反転させる容器反転手段(全体として符号14で示す)が設けられている。前記ガイド部材12A、12Bよりもやや上方の、この容器反転手段14側(図1の上方)に、容器4の胴部4bに当接して支持するボトル支持ガイド16が、そして、その向かい側に搬送コンベヤ2方向に向けて進退動可能なセンタリングガイド18が配置されている。なお、図2では、容器反転手段14側のガイド部材12Aの図示を省略し、センタリングガイド12側のガイド部材12Bのみを示している。また、この実施例では、洗浄ポジションWにもガイド部材12A、12Bを配置しているが、この部分はボトル支持ガイド16とセンタリングガイド18を設けているので、ガイド部材12A、12Bを省略することもできる。
【0010】
センタリングガイド18は、スライド用シリンダ20のピストンロッド20aに取り付けられており(図2参照)、搬送コンベヤ2上の容器4に当接する位置(図1ないし図2に示す位置)と、当接しない位置とに進退動できるようになっている。センタリングガイド18の前面側(搬送コンベヤ2側)には、容器4の胴部4b外面の形状に合致したパッド18aが取り付けられており、前進して容器4に前記パッド18aを当接させることにより、これら容器4を正確に位置決めすることができる。
【0011】
次に、容器反転手段14の構成について説明する。容器反転手段14は、フレーム22の両側壁に回転自在に支持された回転軸24と、この回転軸24に取り付けられて一体的に回転する前記ボトル支持ガイド16および後に説明するグリッパ26(図4および図5参照)とを備えている。回転軸24は前記搬送コンベヤ2と平行に配置されている。回転軸24には、この回転軸24と直交する2本の平行なロッド28が搬送コンベヤ2方向を向けて取付けられ、これら2本の取り付けロッド28の先端に前記ボトル支持ガイド16が固定されている。このボトル支持ガイド16は、搬送コンベヤ2上の容器4に当接して支持した状態(図1ないし図3に示す状態)では、取り付けロッド28が水平で、ボトル支持ガイド16の前面が垂直になっている。
【0012】
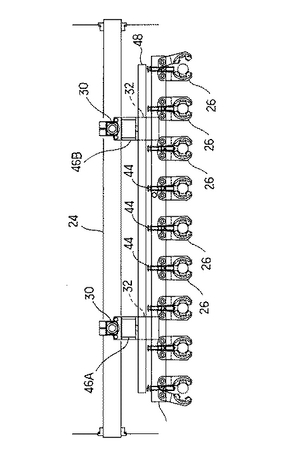
また、回転軸24には、前記取り付けロッド28と直角な2本の支柱30が固定され、これら支柱30の回転端(図2および図3の状態では上端)に支柱30と直角な2枚の支持プレート32が固定されている。この支持プレート32の先端側に搬送コンベヤ2と平行なグリッパ取付ベース34が固定され、この取付ベース34上に複数のグリッパ26が取り付けられている。これらグリッパ26は、1回に洗浄される容器4の数と同じ数(この実施例では9個)だけ、センタリングガイド18により位置決めされた容器4の首部4aの間隔と同じ間隔で配置されている。
【0013】
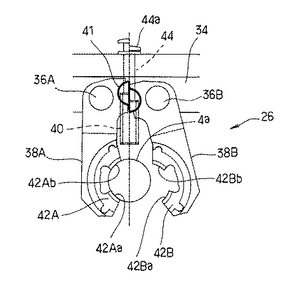
各グリッパ26は、図5に示すように、前記グリッパ取付ベース34上に支点ピン36A、36Bを介して回動自在に支持された一対の開閉アーム38A、38Bを備えている。両開閉アーム38A、38Bの中間部に、前記取付ベース34の後方側からシャフト44が進退動可能に挿入され、その先端部上にローラ41が取り付けられている。シャフト44の先端面と取付ベース34側のばね座(図示せず)との間にスプリング40が挿入され、前記シャフト44を後方側へ向かって常時付勢している。
【0014】
両開閉アーム38A、38Bの基部側(支点ピン36A、36B側)に略円弧状の凹部が形成され、この凹部内に前記ローラ41が嵌合しており、スプリング40を撓めてシャフト44を押し込んで、このローラ41を前進させると、前記凹部の前面側(図5の下側)を押圧して強制的に開閉アーム38A、38Bを外方に回転させて開放する(図5の右側の状態を参照)。また、スプリング40を押圧する力を除くと、シャフト44がスプリング40に押し戻されて、ローラ41が前記凹部の背面側を押圧して開閉アーム38A、38Bを閉じるようになっている。前記各グリッパ26のシャフト44は、通常はスプリング40に押されて後端部44aが、取付ベース34の後方に突出しており、この部分44aを前方へ押圧すると、シャフト44が前進してスプリング40を撓め、両開閉アーム38A、38Bを開放する。
【0015】
前記支持プレート32上に、グリッパ開閉用の一対のシリンダ46A、46Bが固定されている。これら両開閉用シリンダ46A、46Bのピストンロッドの先端に、前記回転軸24と平行な押圧プレート48が固定されている。この押圧プレート48は、開閉用シリンダ46A、46Bの非作動時には、前記シャフト44の後端部44aよりも僅かに後方に位置しており、その状態では、シャフト44がスプリング40に押されて後退しているので、両開閉アーム38A、38Bが閉じている。また、開閉用シリンダ46が作動すると、押圧プレート48が前進し、シャフト44を押し込んでスプリング40を圧縮し両開閉アーム38A、38Bを開放する。
【0016】
両開閉アーム38A、38Bの先端部寄りに、内面にそれぞれ2個所の保持部42Aa、42Ab、42Ba、42Bbを有するほぼ円弧状のパッド42A、42Bが取り付けられており、両開閉アーム38A、38Bが閉じると、両側のパッド42A、42Bに設けられている4個所の保持部42Aa、42Ab、42Ba、42Bbによって容器4の首部4aを保持するようになっている(図5の左側の状態を参照)。
【0017】
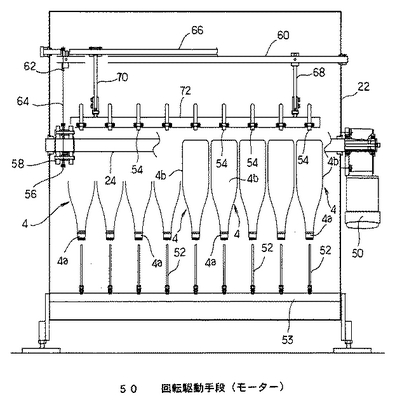
グリッパ26およびボトル支持ガイド16が取り付けられている回転軸24は、モータ(回転駆動手段)50(図6参照)により回転駆動されるようになっており、各グリッパ26が搬送コンベヤ2上に起立している容器4の首部4aを把持するとともに、ボトル支持ガイド16がその容器4の胴部4bに当接して支持する位置、つまり、図2の右上部に示す位置と、容器4を反転させて倒立状態にした位置、つまり、図2の左下に示す位置との間で回転するようになっている。これらグリッパ26、ボトル支持ガイド16、回転軸24およびこの回転軸24を回転駆動するモーター50等により容器反転手段14が構成されている。なお、この実施例では、回転軸24の中心がセンタリングガイド18の下端よりも低い位置に配置されている(図2および図3参照)。このような配置にしたことにより、グリッパ26とボトル支持ガイド16によって支持した容器4を、センタリングガイド18を前進させた状態のまま回転させることができる。
【0018】
前記容器反転手段14によって倒立状態になった各容器4の口部と向かい合う位置に、直立した状態の内洗ノズル(洗浄手段)52が吐出口を上に向けて配置されている(図6参照)。これら内洗ノズル52には、洗浄水供給管53から洗浄水が供給されて容器4内に吹き込まれ、この容器4の内部を洗浄する。
【0019】
また、外洗ノズル(洗浄手段)54は、倒立した状態の容器4の底部上方から洗浄水を吹き付けるようになっており、反転する容器4に干渉しないように、容器4の回転に連動して洗浄位置と退避位置とに移動できるようになっている。前記回転軸24の一方の端部(図6の左端)寄りに、スプロケット56が嵌合している。このスプロケット56は、間欠カムを用いた減速機構58を介して回転軸24の回転を伝達されて回転する。回転軸24の上方の、前記搬送コンベヤ2から遠い側(図2の左側)に、回転軸24と平行な支点軸60が回転自在に支持されており、この支点軸60にスプロケット62が固定されている。前記回転軸24のスプロケット56とこの支点軸60のスプロケット62との間にチェーン64が掛け回されており、このチェーン64を介して前記回転軸24の回転を支点軸60に伝達する。
【0020】
上方の支点軸60の近くに、この支点軸60と平行な従動軸66が回転自在に支持されている。支点軸60と従動軸66にそれぞれ2本のリンク68、70が連結され、これらリンク68、70の先端に、外洗ノズル54を取り付けた取付ブロック72が連結されている。前記回転軸24の回転を、スプロケット56およびチェーン64を介して支点軸60に伝えると、この支点軸60と従動軸66にそれぞれ連結されたリンク68、70、およびその先端に連結された取付ブロック72が回動し、外洗ノズル54の先端が、倒立した状態の容器4の底面中央部に向かい合う位置と、容器4が回転移動する軌跡の外側に退避した位置との間で移動する。このように外洗ノズル54を移動可能にしたことにより、外洗ノズル54を容器4の底部に接近させ、洗浄水を拡散させずに容器4に吹き付けることができ、洗浄水のロスを無くすことができる。
【0021】
以上の構成に係る容器洗浄装置の作動について説明する。搬送コンベヤ2によって上流側から搬送されてきた容器4が、ロータリーストッパ10によって所定個数(この実施例では9個)ずつ切り離されて、洗浄ポジションWに供給される。搬送コンベヤ2の駆動モーター6にエンコーダ8が設けられており、このエンコーダ8からのパルス数が所定数カウントされると、所定個数の容器4が洗浄ポジションWに供給されたと判断して、スライド用シリンダ20を作動させてセンタリングガイド18を搬送コンベヤ2方向に前進させる。
【0022】
容器4が洗浄ポジションWに供給されるときには、容器反転手段14のグリッパ26およびボトル支持ガイド16は、容器4と干渉しないように後方(図2の左方向)に約10度ほど傾斜した状態になっており、前記センタリングガイド18が前進するタイミングに合わせて搬送コンベヤ2側に向けて回転させる。前記センタリングガイド18とボトル支持ガイド16によって容器4の胴部4bを両側から挟持して、走行している搬送コンベヤ2上で容器4を停止させるとともに、正確に位置決めする。
【0023】
前記ボトル支持ガイド16とグリッパ26は回転軸24に取り付けられて一体的に回転するようになっており、ボトル支持ガイド16が搬送コンベヤ2上の容器4に当接したときには、グリッパ26が容器4の4a上に移動している。このときには、グリッパ26の両開閉アーム38A、38Bが開放した状態になっており、容器4の首部4aの両側に位置している。この位置で、開閉用シリンダ46A、46Bのピストンロッドを収縮させると、押圧プレート48が後退してシャフト44がスプリング40により後方へ押し出され、両開閉アーム38A、38Bが閉じて容器4の首部4aをグリップする。
【0024】
次に、回転軸24をモーター50により回転させてグリッパ26およびボトル支持ガイド16を、図2の反時計回り方向へ回転させる。すると、回転軸24が180度回転して、搬送コンベヤ2上で起立していた容器4が倒立した状態になる。容器4の首部4aをグリッパ26によって把持するとともに、容器4の胴部4bをボトル支持ガイド16によって支持しつつ、この容器4を反転させるので、1.8リットルびんのような重量のある容器4でも、正確に位置決めし安定した状態で反転させることができる。
【0025】
搬送コンベヤ2上の容器4をグリッパ26が把持した時点では、外洗ノズル54がこの容器4の回転する軌跡の外側に位置しているが、回転軸24の回転によりグリッパ26およびボトル支持ガイド16が容器4を反転させるのに連動して、外洗ノズル54が移動する。この外洗ノズル54は、回転軸24の回転を減速機構58によって減速して伝達される支点軸60と、この支点軸60と平行な従動軸66にそれぞれ連結された2本の長いリンク68、70の先端部間に取り付けられており、倒立状態になった容器4の底面の中央に向かい合う位置に移動する。
【0026】
倒立状態の容器4の下方側から内洗ノズル52により容器4内に洗浄水を吹き込むとともに、外洗ノズル54によって容器4の底面に上方側から洗浄水を吹き付けて、この容器4の内外を洗浄する。洗浄後、水切りを行った後、回転軸24を前記反転時と逆に180度回転させて容器4を起立状態にして搬送コンベヤ2上に戻す。搬送コンベヤ2は駆動を続けており、この搬送コンベヤ2上に戻された容器4は、ボトル支持ガイド16とセンタリングガイド18の間に挟持されるとともに、グリッパ26によって首部4aを把持されて搬送コンベヤ2上に停止している。この状態から、グリッパ開閉用シリンダ46A、46Bを作動させて押圧プレート48を前進させ、シャフト44を押し込んでスプリング40を圧縮し、両開閉アーム38A、38Bを開放する。その後、回転軸24を回転させて、グリッパ26およびボトル支持ガイド16を後方に傾斜させて容器4と干渉しない位置に移動させるとともに、スライド用シリンダ20を作動させてセンタリングガイド18を後退させる。
【0027】
グリッパ36、ボトル支持ガイド16およびセンタリングガイド18から解放された洗浄済みの容器4は、洗浄ポジションWから下流側に送られる。容器4が洗浄ポジションWから排出されるとともに、ロータリストッパ10によって停止されていた待機中の次の容器4が、導入を開始し、洗浄ポジションWに供給され、同様の工程が行われる。
【図面の簡単な説明】
【0028】
【図1】容器洗浄装置の平面図である。(実施例1)
【図2】前記容器洗浄装置に設けられた容器反転手段の側面図である。
【図3】搬送コンベヤ上に容器を停止させた状態を簡略化して示す側面図である。
【図4】グリッパの平面図である。
【図5】グリッパを拡大して示す平面図である。
【図6】前記容器洗浄装置に設けられた容器反転手段および洗浄手段の正面図である。
【符号の説明】
【0029】
2 搬送コンベヤ
4 容器
4a 容器の首部
4b 容器の胴部
6 駆動手段(モーター)
14 反転手段
16 支持ガイド
18 センタリングガイド
20 進退動手段(スライド用シリンダ)
24 回転軸
26 グリッパ
50 回転駆動手段(モーター)
52 洗浄手段(内洗ノズル)
54 洗浄手段(外洗ノズル)
【特許請求の範囲】
【請求項1】
容器を起立状態で供給する搬送コンベヤと、この搬送コンベヤを駆動する駆動手段と、この搬送コンベヤの側方に配置され、供給されてくる容器を反転させる反転手段と、反転された容器に洗浄水を吹き付ける洗浄手段と、搬送コンベヤによって供給されてくる容器の胴部に係合して位置決めを行うセンタリングガイドと、このセンタリングガイドを進退動させる進退動手段とを備え、
前記反転手段が、容器の首部を把持するグリッパと、容器の胴部を支持する支持ガイドと、前記グリッパおよび支持ガイドを回転させる回転駆動手段とを備え、搬送コンベヤによって供給されてくる容器をセンタリングガイドで位置決めした後、この容器の首部をグリッパで把持するとともに、胴部を支持ガイドで支持しつつ回転駆動手段によって反転させて洗浄することを特徴とする容器洗浄装置。
【請求項2】
前記反転手段のグリッパおよび支持ガイドの位置に容器を供給、排出する際に、前記回転駆動手段によりこれらグリッパおよび支持ガイドを回転させて所定角度傾斜させることを特徴とする請求項1に記載の容器洗浄装置。
【請求項3】
前記反転手段は、グリッパおよび支持ガイドの回転中心となる回転軸を有し、この回転軸をセンタリングガイドよりも低い位置に配置したことを特徴とする請求項1または請求項2のいずれかに記載の容器洗浄装置。
【請求項1】
容器を起立状態で供給する搬送コンベヤと、この搬送コンベヤを駆動する駆動手段と、この搬送コンベヤの側方に配置され、供給されてくる容器を反転させる反転手段と、反転された容器に洗浄水を吹き付ける洗浄手段と、搬送コンベヤによって供給されてくる容器の胴部に係合して位置決めを行うセンタリングガイドと、このセンタリングガイドを進退動させる進退動手段とを備え、
前記反転手段が、容器の首部を把持するグリッパと、容器の胴部を支持する支持ガイドと、前記グリッパおよび支持ガイドを回転させる回転駆動手段とを備え、搬送コンベヤによって供給されてくる容器をセンタリングガイドで位置決めした後、この容器の首部をグリッパで把持するとともに、胴部を支持ガイドで支持しつつ回転駆動手段によって反転させて洗浄することを特徴とする容器洗浄装置。
【請求項2】
前記反転手段のグリッパおよび支持ガイドの位置に容器を供給、排出する際に、前記回転駆動手段によりこれらグリッパおよび支持ガイドを回転させて所定角度傾斜させることを特徴とする請求項1に記載の容器洗浄装置。
【請求項3】
前記反転手段は、グリッパおよび支持ガイドの回転中心となる回転軸を有し、この回転軸をセンタリングガイドよりも低い位置に配置したことを特徴とする請求項1または請求項2のいずれかに記載の容器洗浄装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2006−43601(P2006−43601A)
【公開日】平成18年2月16日(2006.2.16)
【国際特許分類】
【出願番号】特願2004−229098(P2004−229098)
【出願日】平成16年8月5日(2004.8.5)
【出願人】(393028357)シブヤマシナリー株式会社 (77)
【Fターム(参考)】
【公開日】平成18年2月16日(2006.2.16)
【国際特許分類】
【出願日】平成16年8月5日(2004.8.5)
【出願人】(393028357)シブヤマシナリー株式会社 (77)
【Fターム(参考)】
[ Back to top ]