
容器送出し装置
【課題】構造が簡単で耐久性と信頼性に優れ、直径の異なる複数種の容器に対応することができる容器送出し装置を提供する。
【解決手段】容器Vが搬送される搬送路2Aに対して、第1のモータ15によって進退変位するピンホイールベース12上に、第2のモータ43により回転駆動されるピンホイール5が設けられている。前記ピンホイール5は、第3のモータ38によって径方向に伸縮駆動される複数の伸縮ピン4を放射状に有しており、搬送路2A上を搬送される容器Vの直径に応じて、伸縮ピンを伸縮させるとともに、ピンホイールベース12を進退させることにより、伸縮ピン4を搬送路2A上の容器Vに適正位置で係合させる。
【解決手段】容器Vが搬送される搬送路2Aに対して、第1のモータ15によって進退変位するピンホイールベース12上に、第2のモータ43により回転駆動されるピンホイール5が設けられている。前記ピンホイール5は、第3のモータ38によって径方向に伸縮駆動される複数の伸縮ピン4を放射状に有しており、搬送路2A上を搬送される容器Vの直径に応じて、伸縮ピンを伸縮させるとともに、ピンホイールベース12を進退させることにより、伸縮ピン4を搬送路2A上の容器Vに適正位置で係合させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、容器搬送ラインにおいて、容器の搬送タイミングを調整するために用いられる容器送出し装置に関し、特に、コンベヤで搬送される容器群を搬送中に数個ずつにグルーピングする場合に好適に用いることのできる容器送出し装置に関する。
【背景技術】
【0002】
前工程からコンベヤで連続的に搬送されてくる容器の搬送タイミングを後続の工程の受け入れタイミングに同期させて送り出す送出し装置としては、従来、スターホイールやタイミングスクリューが広く採用されている。しかしこれらの送出し装置の場合、直径が相違する容器を取り扱う場合は、その都度その直径に適合する大きさやピッチを有するスターホイールやタイミングスクリューに取り替えなければならないので、複雑で面倒な型替え作業が必要であった。
【0003】
このような問題点を解決するものとして、複数の棒状の係合部材が回転方向と逆方向に弾性的に回動可能に放射状に配置したロータリストッパを有し、型替えに際してその中心位置を移動可能にした物品間隔出し装置(特許文献1)と、搬送コンベヤ上の容器に係合する放射状に設けられている複数のストッパ部材を備えたロータリストッパを有し、ストッパー部材が進退動機構により進退できるとともに、ロータリストッパの駆動軸が、偏心軸周りに揺動機構で揺動自在になっていることによって、多様な規格の容器に対応できるようにした容器供給装置(特許文献2)が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−278444号公報
【特許文献2】特許第3518071号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前述した特許文献1に記載されたものは、係合部材は単一の長さであり、搬送する物品の直径が異なる場合はロータリストッパの中心を移動させて調整するだけであるので、物品の大きさが変わっても係合部材先端間のピッチは変わらない。そのため、それを調整するために係合部材を回転方向と逆方向に傾斜または弾性的に回動するように構成しているが、係合部材を弾性的に回動させながら容器間に食い込ませるので、送出しが不安定になり未だ満足するものではない。
【0006】
また、前述した特許文献2に記載されているロータリストッパは、その回転中心となる駆動軸が、偏心軸に一端を片持ち状態で固定された揺動部材の他端に回転自在に軸支されていて、偏心軸の上に同軸に設けられた中空駆動軸に固定された歯車が駆動軸に固定された歯車と噛み合って、中空駆動軸から駆動軸へ回転が伝達される構造になっている。そのため、ロータリストッパを搬送コンベヤに対して接近・離間調整するために、駆動軸を揺動軸まわりに揺動させると、中空駆動軸に固定された歯車周りに前記駆動軸に固定された歯車が遊星運動して中空駆動軸に対してロータリストッパの回転角度の位相が変化してしまうため、その位相調整を行う差動機構が必要になっている。また、ストッパ部材を進退動させるためのモータや、ストッパ部材の進退変位量を検出するポテンショメータ等が、回転駆動されるロータリストッパ上に設けてあるため、これらのモータやポテンショメータ等の電気系統の接続にスリップリングやブラシが必要になり、装置全体の構造が複雑になる問題がある。また、ロータリストッパを偏心軸に固定された揺動部材で片持ち支持しているため、偏心軸には、ロータリストッパや揺動部材等の自重による曲げモーメントが常時作用しており、その結果、偏心軸の支持構造部分の摩耗が早期に生じて位置決め精度が低下する恐れがある。
【0007】
そこで、本発明は、前述したような従来技術の問題点を解消し、構造が簡単で耐久性と信頼性に優れ、直径の異なる複数種の容器に簡単に対応することができ、安定して容器を定ピッチで送出すことができる容器送出し装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成する本発明の容器送出し装置は、ピンホイールベース上に垂直な軸線周りに回転自在に支持され、モータにより回転駆動されるピンホイール軸と、前記ピンホイール軸に対してその軸線周りの回転が拘束され、且つ昇降変位自在に設けられた昇降体と、該昇降体を昇降駆動する昇降駆動手段と、前記ピンホイール軸に対して、円周方向に等間隔で放射状に、且つそれぞれ径方向に進退自在に設けられた複数の伸縮ピンと、前記それぞれの伸縮ピンと前記昇降体との間に設けられ、前記ピンホイール軸に対する前記昇降体の昇降変位を各伸縮ピンの進退変位に変換する複数のリンク部材とを備えたことを特徴とするものである。
【0009】
前記昇降駆動手段として、前記昇降体に対して前記ピンホイール軸の軸線周りに回転自在に連結された連結体と、前記ピンホイールベースに対して、前記ピンホイール軸とそれぞれ並行する軸線周りに回転自在に支持され、モータにより互いに同期して正逆両方向に回転駆動される複数の回転伝動体と、前記それぞれの回転伝動体と前記連結体の何れか一方に、当該回転伝動体と同心に設けられたナットと、前記それぞれの回転伝動体と前記連結体の何れか他方に、前記回転伝動体と同心に設けられて前記ナットと螺合する昇降ネジ軸とから構成されていることが望ましい。
【0010】
そして、前記ピンホイールベースが、容器搬送コンベヤの搬送路側方に近接して設けられる固定ベース上に、前記搬送路に対して進退変位自在に支持され、モータにより進退駆動されるように構成され、前記伸縮ピンの先端が、搬送路上の容器に対して適正な係合位置を保つように、前記ピンホイールベースを進退変位させるようにしてなり、前記固定ベースを進退駆動するモータと前記伸縮ピンを伸縮変位させるモータはそれぞれ別個のモータであり、それらのモータを連係制御するモータ制御手段を備えてなることによって、型換えに際して伸縮ピンの伸縮位置調整とピンホイール全体の容器搬送コンベヤに対する進退位置調整を同期して同時に行なうことができるので望ましい。
【0011】
また、伸縮ピンの先端部が容器から離れて搬送路外へ回転移動する位置に近接して、前記搬送路内を搬送される容器群の間に側方から進入し、前記容器群から先頭の所定数の容器群を切り離して容器搬送コンベヤより速い速度で所定距離押送した後、当該搬送路側方へ退避する動作を周期的に反復するセパレータバーを有する分離ユニットと、セパレータバーに押送される容器群の先頭の容器の直前に前記搬送路の側方から進入して前記セパレータバーとの間にこれらの所定数の容器群を挟んで前進移動した後、搬送路側方へ退避する動作を周期的に反復する抑えバーを有する抑えユニットを設けることによって、容器を確実に所定本数づつ区分けして送り出すことができ、下流側での包装工程等後工程の作業効率を高めることができる。
【発明の効果】
【0012】
請求項1に記載された発明に係る容器送出し装置によれば、搬送ラインを搬送される容器を直径の異なるものに変更する場合に、伸縮ピンが搬送路上の容器に適正位置で係合するように、伸縮ピンの突出長さを自動的に速やかに調整することができ、部材を交換することなく単一の容器送出し装置で直径の相違する容器の送出しに適合できるので、型替えが非常に簡単に短時間にできる。伸縮ピンの伸縮調整機構がピンホイール軸に沿って昇降変位する昇降体の変位をリンク部材を介して伸縮ピンの伸縮に変換しているので、機構が簡単であり、且つ伸縮ピンを確実に適正位置に変位させることができる。
また、請求項2に記載の発明によれば、伸縮ピンの伸縮調整機構として、ピンホイールベース上でモータで正逆両方向に同期回転される複数の回転伝動体の回転を昇降ネジ軸とナットを介して連結体に昇降変位として伝達し、これをさらにピンホイール軸に設けた昇降体に伝達し、昇降体の昇降変位を複数のリンク部材を介して各伸縮ピンの進退変位に変換しているため、カム等を用いることなく簡単な機構で構成でき、しかも伸縮ピンを駆動するモータをピンホイールベース側に設置でき、電気系統の配線接続構造が簡単である。
【0013】
請求項3に記載の発明によれば、搬送ラインを搬送される容器を直径の異なるものに変更する場合に、伸縮ピンが搬送路上の容器に適正位置で係合するように、伸縮ピンの突出長さと搬送路に対するピンホイールベースの位置とを自動的に速やかに位置決めすることができる。さらに、ピンホイール軸を支持するピンホイールベースを搬送路に対して進退変位させるためのモータからの駆動力伝達系と、ピンホイール軸を回転駆動するためのモータからの駆動力伝達系とが独立しているため、構造が簡単で耐久性と信頼性に優れた容器送出し装置を提供することができる。
【0014】
請求項4に記載された発明に係る容器送出し装置によれば、後工程において、容器を所定数ずつカートンにパックする場合等において、コンベヤで搬送される容器群を搬送中に所定数ずつに確実にグルーピングすることができ、且つグル−ピングの過程において容器が倒れるのを確実に防いで、次工程に送出すことができる。
【図面の簡単な説明】
【0015】
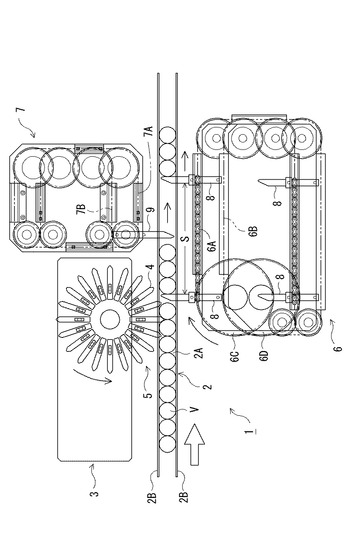
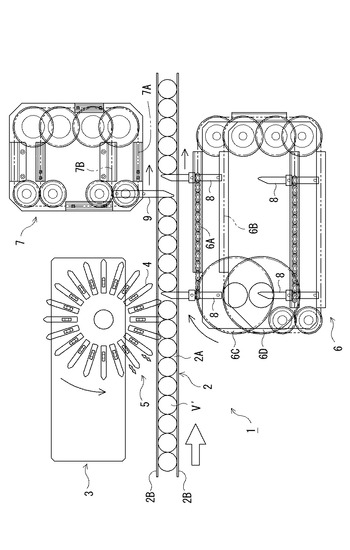
【図1】本発明に係る容器送出し装置が設けられている容器搬送ラインの概略平面図であり、小径の容器を3個ずつグルーピングしている容器搬送ラインの概略平面図である。
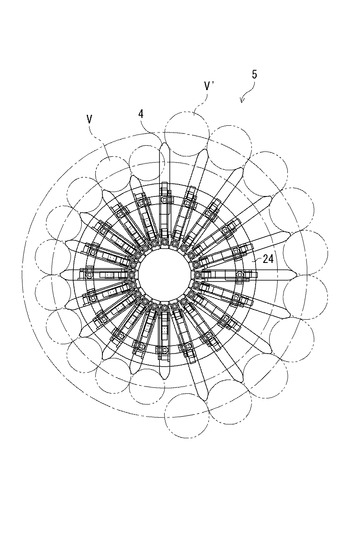
【図2】ピンホイールの伸縮ピンの伸縮状態を示す平面図である。
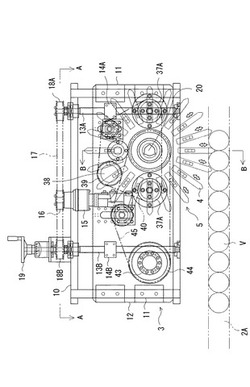
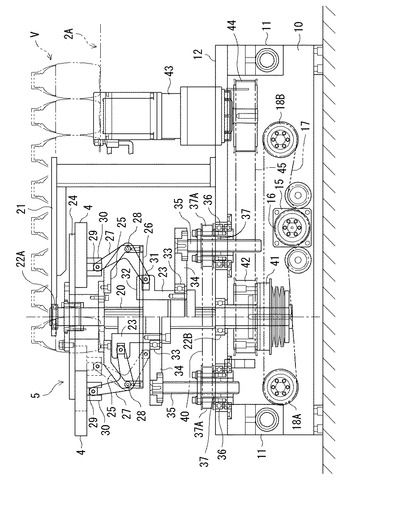
【図3】本発明に係る容器送出し装置の概略構造を示す平面図である。
【図4】図3のA−A位置から見た容器送出し装置の概略構造を示す側面図である。
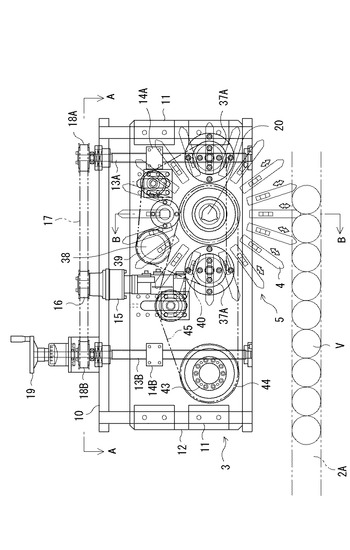
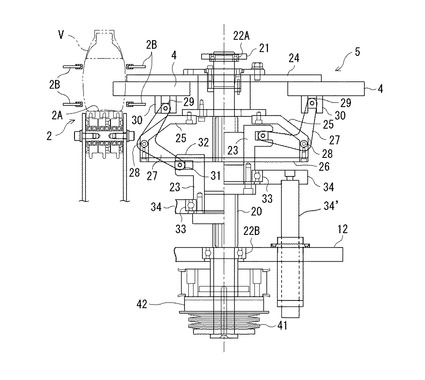
【図5】図3のB−B位置から見た容器送出し装置の要部構造図である。
【図6】大径の容器を5個ずつグルーピングしている容器搬送ラインの概略平面図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態を図面に基づいて説明する。
図1は、本発明の容器送出し装置が設けられている容器搬送ラインの平面図であって、本実施形態における容器搬送ラインは、容器にアルコール飲料等の内容物を充填して封緘する前工程と、これらの容器を定数個ずつ紙カートンにパックする後工程との間に設けられており、ここを容器が通過する間に、前工程から連続して送られてくる容器群を、後工程のために所定の個数ずつグルーピングするためのラインである。しかしながら、本発明は、必ずしもそのようなラインに設けられるものに限るものではない。
【0017】
図1に示すように、容器搬送ライン1は、前工程から後工程へ容器Vを連続的に搬送する容器搬送コンベヤ2を有している。前記容器搬送コンベヤ2の搬送路2Aの搬送方向上流側の側方には、容器送出し装置3が設けられている。
【0018】
前記容器送出し装置3は、容器搬送コンベヤ2で搬送される容器Vに、側方から係合する多数の伸縮ピン4が放射状に設けられたピンホイール5を有している。前記ピンホイール5は、伸縮ピン4先端が、容器搬送コンベヤ2の搬送速度よりも遅い速度で回転し、隣り合う伸縮ピン4間に上流側から互いに当接した状態で搬送されてくる容器Vの搬送タイミングをここで整える役割を果たしている。
【0019】
これらの伸縮ピン4は、後述する機構により、ピンホイール5の径方向に伸縮自在になっており、図2の左半分に示すように、伸縮ピン4が収縮した位置では、隣接する伸縮ピン4の先端間で小径の容器Vに係合し、また、同図右半分に示すように、伸縮ピン4を伸長した位置では、大径の容器V’に係合することができるようになっている。
【0020】
また、図1においては詳細な構造の図示は省略しているが、取り扱う容器Vの大小に関わらず伸縮ピン4が、搬送路2Aの両側に設けられている一対のガイドレール2B間で案内される容器Vと適正に係合するように、ピンホイール5は、伸縮ピン4が伸長している場合には、搬送路2Aから離間した後退位置で回転し、また、伸縮ピン4が収縮している場合には、搬送路2Aに接近した前進位置で回転するように、搬送路2Aに対して進退自在な構造になっている。なお、前記一対のガイドレール2Bの間隔は、搬送する容器Vの外径に応じて調整できるようになっている。
【0021】
また、容器搬送ライン1のピンホイール5の下流側には、搬送路2A上を搬送される容器V群を後工程で紙カートンにパックする個数ずつにグルーピングするための、分離ユニット6と抑えユニット7が設けられている。分離ユニット6と抑えユニット7は、ピンホイール5で整えられた容器Vの搬送タイミングに合わせて駆動されるセパレータバー8と抑えバー9をそれぞれ有している。
【0022】
分離ユニット6は、容器送出し装置3と搬送路2Aを挟んだ反対側に設けられていて、セパレータバー8は、水平面内で平行した2組の無端状経路に沿って互いに同期して一方向に循環駆動される2組のローラチェーン6A、6Bのそれぞれに対して、垂直軸周りに回転自在に軸着されており、これらのローラチェーン6A、6Bの循環する経路に沿って水平面内で並進移動するようになっている。
【0023】
また、この実施形態のものにおいては、セパレータバー8は、これらのローラチェーン6A、6Bに等間隔に4カ所取り付けられており、また、ローラチェーン6A、6Bは、それぞれ図示していないサーボモータで回転駆動される駆動スプロケットを含んだ4つのスプロケットに掛け渡されている。
【0024】
これらのローラチェーン6A、6Bがそれぞれ掛け渡されているピンホイール5に近い側の2つのスプロケット6C、6Dは、他のスプロケットよりも直径が大きく、セパレータバー8の先端は、これらのスプロケット6C、6Dを通過するローラチェーン6A、6Bによって緩やかな円弧状の軌跡を描いて搬送路2Aに進入し、ピンホイール5の伸縮ピン4から離脱した直後の容器Vと後続の容器Vとの間に側方から割り込むようになっている。
【0025】
搬送路2Aに進入したセパレータバー8は、ピンホイール5の伸縮ピン4が容器Vを搬送路2Aの下流方向に押し出す速度よりも大きい速度で、先行するセパレータバー8との間隔Sよりやや長い区間を搬送路2Aと並行して移動し、その後、搬送路2A内から側方へ速やかに退避する運動を行う。なお、搬送路と並行する区間における前後のセパレータバー8の間隔Sは、後工程でパッケージする容器Vの最大個数分(例えば5個)の列の長さよりも長く設定してある。
【0026】
一方、抑えユニット7は、搬送路2Aに対して、容器送出し装置3と同じ側に配置されていて、抑えバー9は、前述した分離ユニット6のセパレータバー8と同様に、水平面内で平行した2組の無端状の経路に沿って互いに同期して一方向に循環駆動される2組のローラチェーン7A、7Bのそれぞれに対し、垂直軸周りに回転自在に軸着されており、これらのローラチェーン7A、7Bの循環する経路に沿って水平面内で並進移動するようになっている。
【0027】
抑えバー9は、搬送路2Aに側方から進入してセパレータバー8で押送される前記所定個数分の容器Vの先頭に当接し、前記セパレータバー8との間にこれらの所定個数の容器Vを間に挟み込んで一定の距離だけ当該セパレータバー8と同一速度で一体的に移動し、その後、搬送路2Aから側方へ退避する動作を行い、グルーピングされた容器Vどうしが搬送方向前後に当接した状態で後工程に搬送されるようにしている。
【0028】
なお、図1においては、抑えバー9は1つしか図示していないが、実際には、セパレータバー8が前記所定個数の容器Vを押送するタイミングに合わせるために、前記2組のローラチェーン7A、7Bのそれぞれに対して等間隔で複数個取り付けられている。また、図示していないが、これらのローラチェーン7A、7Bは、前述した分離ユニット6のサーボモータと連係して制御されるサーボモータで駆動されるようになっている。
【0029】
また、この実施形態においては、分離ユニット6のセパレータバー8や抑えユニット7の抑えバー9を、2組のローラチェーン6A、6B、7A、7Bに取り付けて一方向に循環駆動しているが、このような機構に限定するものではなく、セパレータバー8や抑えバー9が、搬送路2A内に側方から進入してから所定の区間、容器搬送コンベヤ2の搬送方向に等速度で移動した後、搬送路2Aから側方へ退避する運動を反復する機構であればよい。
【0030】
なお、抑えユニット7は、図示は省略してあるが、搬送路2Aの方向に移動自在な構造を備えていて、グルーピングする容器Vのサイズや個数に応じて設置位置を調整できるようになっている。
【0031】
次に、容器送出し装置3の構造を図面に基づいて詳細に説明する。図3及び図4に示すように、容器送出し装置3は、床面に設置された固定ベース10を備え、その上に、左右一対のリニアガイド機構11によって、搬送路2Aに対して進退変位自在に支持された、ピンホイールベース12を有している。
【0032】
また、固定ベース10には、左右一対のネジ軸13A、13Bが回転自在に軸受支持されており、これらのネジ軸13A、13Bには、ピンホイールベース12に固定されている一対のナット14A、14Bがそれぞれ螺合している。
【0033】
なお、図3においては、説明の都合上、ピンホイールベース12とネジ軸13A、13Bが重なって描かれているが、実際は、これらのネジ軸13A、13Bは、ピンホイールベース12の下方に配置され、また、これらのナット14A、14Bは、ピンホイールベース12の下面側に取り付けられている。
【0034】
前記一対のネジ軸13A、13Bは、固定ベース10に取り付けられている正逆両方向に回転自在なサーボモータ(第1のモータ)15により、歯付駆動プーリ16、歯付ベルト17、歯付被駆動プーリ18A、18Bを介して、同期して同方向に回転駆動され、これらのネジ軸13A、13Bにそれぞれ螺合するナット14A、14Bを介して、ピンホイールベース12が進退駆動されるようになっている。
【0035】
なお、一方のネジ軸13Bには、ピンホイールベース12を手動で進退させるための手動ハンドル19が取り付けられている。この手動ハンドル19は、サーボモータ15でピンホイールベース12を駆動する際には、図示しないクラッチ機構により、ネジ軸13Bならびに歯付被駆動プーリ18Bと連結を解除できるようになっている。
【0036】
図4に示すように、ピンホイールベース12上には支持ブラケット21が立設されており、この支持ブラケット21に設けられている軸受22Aとピンホイールベース12に設けられている軸受22Bとの間に、ピンホイール軸20が、その軸線を垂直にして回転自在に支持されている。
【0037】
ピンホイール軸20の途中部分の外周面にはスプライン溝が形成されており、この部分には筒状の昇降体23が昇降自在に装着されている。昇降体23の内周面には、前記スプライン溝と噛み合う内歯のスプライン溝が形成されていて、ピンホイール軸20に対してその軸線周りの昇降体23の回転が拘束されている。
【0038】
ピンホイール軸20の上端付近には、伸縮ピン保持体24が固定されている。伸縮ピン保持体24は円板状に形成されていて、その下面側に、放射状に配列されている複数の伸縮ピン4のそれぞれを、図示していないガイド機構を介してその径方向にスライド自在に支持している。
【0039】
また、ピンホイール軸20には、複数のリンク保持アーム25が固定されている。これらのリンク保持アーム25は、それぞれの伸縮ピン4に下方位置に対応するように、放射状に配置されていて、それぞれの先端部は下方に屈曲して下端どうしが連結環26で互いに連結されている。
【0040】
これらのリンク保持アーム25の先端付近には、それぞれベルクランク状のリンク部材27の屈曲部がリンク軸28で揺動自在に軸支されている。また、これらのリンク部材27の上方に伸びる腕の先端部には、スライド駒29が回動自在に軸支されている。
【0041】
一方、それぞれの伸縮ピン4の下面には、垂直ガイド部30が設けられていて、スライド駒29は、前記垂直ガイド部30に設けられた垂直方向の溝内にスライド自在に係合している。
【0042】
また、これらのリンク部材27の他方の腕の先端部には、スライド駒29と同様なスライド駒31が回動自在に軸支されており、それぞれのスライド駒31は、前述した昇降体23の上端部付近にそれぞれ形成されている水平ガイド部32に設けられた水平方向の溝内にスライド自在に係合している。
【0043】
前記昇降体23を昇降させるための昇降駆動手段は、本実施形態では以下のように構成されている。
昇降体23の下部外周には、軸受33を介して後述する連結体34が、昇降体23に対してピンホイール軸20の軸線周りに回転自在に連結されている。なお、前記軸受33は主にスラスト荷重を受けるため、スラスト負荷に対応できる軸受を使用している。
【0044】
図4に示すように、連結体34の下面には、一対の昇降ネジ軸35が垂直に固定されており、これらの昇降ネジ軸35は、ピンホイールベース12にそれぞれ軸受36で垂直軸線周りに回転自在に保持されている一対のナット37に螺合している。
【0045】
これらのナット37の外周にはそれぞれ、ピンホイールとしての歯付プーリ37Aが一体に設けられていて、図3に示すように、これらの歯付プーリ37Aと、サーボモータ38の回転軸に固定されている歯付駆動プーリ39間には歯付ベルト40が掛け渡され、サーボモータ38を正逆何れかの方向に回転すると、これら歯付プーリ37Aがナット37と一体に同方向に同期して回転するようになっている。
【0046】
従って、サーボモータ38を正逆何れかの方向に駆動すると、ナット37に螺合している昇降ネジ軸35が連結体34を介して昇降体23を上昇または下降させる。昇降体23の昇降変位は、リンク部材27を介して各伸縮ピン4に伝達され、その結果、昇降体23が上昇するとそれぞれの伸縮ピン4は一斉に伸長し、昇降体23が下降するとこれらの伸縮ピン4は一斉に収縮する。なお、図5において、34’は連結体に固定されたガイドロッドであり、下方部がスライドベース12に上下摺動自在に軸受けされ、連結体34がボールネジ機構により上下動する際のガイドの役割を果たすとともに、ピンホイール5の回転に際してのガタ付きを防止する補強の役割を果たしている。
【0047】
なお、昇降ネジ軸35を歯付プーリ37Aと一体にしてピンホイールベース12に回転自在に設け、ナット37を連結体34に固定してもよい。また、ピンホイールを歯付プーリ37Aに代えて歯車で構成し、サーボモータ38の回転を歯車列を介してこれらのピンホイールに伝達するようにしてもよい。
【0048】
図4及び図5に示すように、ピンホイール軸20の下端部には、トルクリミッタ41を介して歯付プーリ42が取り付けられている。一方、ピンホイールベース12には、サーボモータ43が取り付けられていて、その駆動軸に固定された歯付プーリ44と前記歯付プーリ42との間には、歯付ベルト45が掛け渡されており、サーボモータ43を回転駆動することにより、歯付プーリ42からトルクリミッタ41を介してピンホイール軸20が回転駆動されるようになっている。
【0049】
その際、ピンホイール軸20に作用する負荷トルクが所定の許容値を超えた場合には、トルクリミッタ41の働きによって、歯付プーリ42がピンホイール軸20に対して空転することで、伸縮ピン4やこれに係合して搬送される容器Vの破損を防ぐことができる。
【0050】
図5の左半分に示すように、小径の容器Vを取り扱う場合には、伸縮ピン4は収縮させた状態であり、この場合には、伸縮ピン4の先端部が容器Vと適正位置で係合するように、固定ベース10に対してピンホイールベース12を図3に示すように、搬送路2A側へ接近させた位置に移動させる。
【0051】
一方、大径の容器を取り扱う場合には、伸縮ピン4を伸長させるとともに、ピンホイールベース12は、搬送路2Aから離間させる。なお、本実施形態においては、伸縮ピン4の伸縮とピンホイールベース12の進退は、図示していないモータ制御手段によって、サーボモータ15とサーボモータ38とを連係させて連動させている。従って、型替えに際して、単に所定の型替えボタンを押圧することによって、ピンホイールベースの進退と伸縮ピンの伸縮が同期して行なわれ、一動作で型替えが完了することができる。
【0052】
本実施形態においては、小径の容器Vと大径の容器V’の2種類で説明しているが、モータ制御手段に、直径の異なる容器毎に対応するサーボモータ15とサーボモータ38の回転角度を任意にプログラミングできるものを用いれば、所望の直径の容器に適合するように、伸縮ピン4の進退動作とピンホイールベース12の進退動作とを自動的に連係して位置調整することができる。
【0053】
図6は、前述した容器搬送ライン1において、大径の容器V’を5個ずつにグルーピングしている状態を示す平面図であって、この場合には、図1に示す容器Vを3個ずつにグルーピングする場合と、ピンホイール5が容器V’を送るタイミングは変わらないが、分離ユニット6のセパレータバー8を循環速度を低下させて、ピンホイール5の伸縮ピン4から送り出された容器V’群を5個ずつ切り出し、同時に抑えユニット7の抑えバー9の循環速度もこれに応じて低下させている。
【0054】
この場合、伸縮ピン4は伸長させ、且つ、ピンホイールベース12を図3の位置とは逆に、搬送路2Aから離した位置に移動させ、また、グルーピングする容器Vの数が増加した分、抑えユニット7を容器送出し装置3から搬送方向下流側へ離間させてある。
【0055】
なお、前述した実施形態においては、容器送出し装置3は、容器搬送コンベヤ2の一方の側に1台配置しており、また、搬送路2Aを容器Vが一列に並んで搬送されているが、本発明の容器送出し装置は、本実施形態に限定するものではなく、容器を2列並べて搬送路を搬送する場合には、容器送出し装置を搬送路の両側に2台対称的に配置して使用してもよい。
【0056】
また、前述した実施形態においては、容器送出し装置3の搬送方向下流側に分離ユニット6と抑えユニット7を配置して、容器Vのグルーピングを行っているが、本発明の容器送出し装置3の用途は、これに限定するものではなく、例えば、後工程で容器を受け入れるスターホイール等の回転に、容器の搬送タイミングを同期させるために用いることができる。
【産業上の利用可能性】
【0057】
本発明の容器送出し装置は、容器搬送コンベヤ上を搬送される容器の搬送タイミングを後続の工程の処理タイミングに合わせる場合に利用することができ、特に、コンベヤで搬送される容器群を、搬送中に所定個数ずつにグルーピングする搬送ラインにおいて、好適に利用することができる。
【符号の説明】
【0058】
1 容器搬送ライン
2 容器搬送コンベヤ
2A 搬送路
2B ガイドレール
3 容器送出し装置
4 伸縮ピン
5 ピンホイール
6 分離ユニット
6A、6B ローラチェーン
6C、6D スプロケット
7 抑えユニット
8 セパレータバー
9 抑えバー
10 固定ベース
11 リニアガイド機構
12 ピンホイールベース
13A、13B ネジ軸
14A、14B ナット
15 サーボモータ(第1のモータ)
16 歯付駆動プーリ
17 歯付ベルト
18A、18B 歯付被駆動プーリ
19 手動ハンドル
20 ピンホイール軸
21 支持ブラケット
22A、22B 軸受
23 昇降体
24 伸縮ピン保持体
25 リンク保持アーム
26 連結環
27 リンク部材
28 リンク軸
29、31 スライド駒
30 垂直ガイド部
32 水平ガイド部
33 軸受
34 連結体
35 昇降ネジ軸
36 軸受
37 ナット
37A 歯付プーリ(ピンホイール)
38 サーボモータ(第3のモータ)
39 歯付駆動プーリ
40 歯付ベルト
41 トルクリミッタ
42 歯付プーリ
43 サーボモータ(第2のモータ)
44 歯付プーリ
45 歯付ベルト
【技術分野】
【0001】
本発明は、容器搬送ラインにおいて、容器の搬送タイミングを調整するために用いられる容器送出し装置に関し、特に、コンベヤで搬送される容器群を搬送中に数個ずつにグルーピングする場合に好適に用いることのできる容器送出し装置に関する。
【背景技術】
【0002】
前工程からコンベヤで連続的に搬送されてくる容器の搬送タイミングを後続の工程の受け入れタイミングに同期させて送り出す送出し装置としては、従来、スターホイールやタイミングスクリューが広く採用されている。しかしこれらの送出し装置の場合、直径が相違する容器を取り扱う場合は、その都度その直径に適合する大きさやピッチを有するスターホイールやタイミングスクリューに取り替えなければならないので、複雑で面倒な型替え作業が必要であった。
【0003】
このような問題点を解決するものとして、複数の棒状の係合部材が回転方向と逆方向に弾性的に回動可能に放射状に配置したロータリストッパを有し、型替えに際してその中心位置を移動可能にした物品間隔出し装置(特許文献1)と、搬送コンベヤ上の容器に係合する放射状に設けられている複数のストッパ部材を備えたロータリストッパを有し、ストッパー部材が進退動機構により進退できるとともに、ロータリストッパの駆動軸が、偏心軸周りに揺動機構で揺動自在になっていることによって、多様な規格の容器に対応できるようにした容器供給装置(特許文献2)が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−278444号公報
【特許文献2】特許第3518071号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前述した特許文献1に記載されたものは、係合部材は単一の長さであり、搬送する物品の直径が異なる場合はロータリストッパの中心を移動させて調整するだけであるので、物品の大きさが変わっても係合部材先端間のピッチは変わらない。そのため、それを調整するために係合部材を回転方向と逆方向に傾斜または弾性的に回動するように構成しているが、係合部材を弾性的に回動させながら容器間に食い込ませるので、送出しが不安定になり未だ満足するものではない。
【0006】
また、前述した特許文献2に記載されているロータリストッパは、その回転中心となる駆動軸が、偏心軸に一端を片持ち状態で固定された揺動部材の他端に回転自在に軸支されていて、偏心軸の上に同軸に設けられた中空駆動軸に固定された歯車が駆動軸に固定された歯車と噛み合って、中空駆動軸から駆動軸へ回転が伝達される構造になっている。そのため、ロータリストッパを搬送コンベヤに対して接近・離間調整するために、駆動軸を揺動軸まわりに揺動させると、中空駆動軸に固定された歯車周りに前記駆動軸に固定された歯車が遊星運動して中空駆動軸に対してロータリストッパの回転角度の位相が変化してしまうため、その位相調整を行う差動機構が必要になっている。また、ストッパ部材を進退動させるためのモータや、ストッパ部材の進退変位量を検出するポテンショメータ等が、回転駆動されるロータリストッパ上に設けてあるため、これらのモータやポテンショメータ等の電気系統の接続にスリップリングやブラシが必要になり、装置全体の構造が複雑になる問題がある。また、ロータリストッパを偏心軸に固定された揺動部材で片持ち支持しているため、偏心軸には、ロータリストッパや揺動部材等の自重による曲げモーメントが常時作用しており、その結果、偏心軸の支持構造部分の摩耗が早期に生じて位置決め精度が低下する恐れがある。
【0007】
そこで、本発明は、前述したような従来技術の問題点を解消し、構造が簡単で耐久性と信頼性に優れ、直径の異なる複数種の容器に簡単に対応することができ、安定して容器を定ピッチで送出すことができる容器送出し装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成する本発明の容器送出し装置は、ピンホイールベース上に垂直な軸線周りに回転自在に支持され、モータにより回転駆動されるピンホイール軸と、前記ピンホイール軸に対してその軸線周りの回転が拘束され、且つ昇降変位自在に設けられた昇降体と、該昇降体を昇降駆動する昇降駆動手段と、前記ピンホイール軸に対して、円周方向に等間隔で放射状に、且つそれぞれ径方向に進退自在に設けられた複数の伸縮ピンと、前記それぞれの伸縮ピンと前記昇降体との間に設けられ、前記ピンホイール軸に対する前記昇降体の昇降変位を各伸縮ピンの進退変位に変換する複数のリンク部材とを備えたことを特徴とするものである。
【0009】
前記昇降駆動手段として、前記昇降体に対して前記ピンホイール軸の軸線周りに回転自在に連結された連結体と、前記ピンホイールベースに対して、前記ピンホイール軸とそれぞれ並行する軸線周りに回転自在に支持され、モータにより互いに同期して正逆両方向に回転駆動される複数の回転伝動体と、前記それぞれの回転伝動体と前記連結体の何れか一方に、当該回転伝動体と同心に設けられたナットと、前記それぞれの回転伝動体と前記連結体の何れか他方に、前記回転伝動体と同心に設けられて前記ナットと螺合する昇降ネジ軸とから構成されていることが望ましい。
【0010】
そして、前記ピンホイールベースが、容器搬送コンベヤの搬送路側方に近接して設けられる固定ベース上に、前記搬送路に対して進退変位自在に支持され、モータにより進退駆動されるように構成され、前記伸縮ピンの先端が、搬送路上の容器に対して適正な係合位置を保つように、前記ピンホイールベースを進退変位させるようにしてなり、前記固定ベースを進退駆動するモータと前記伸縮ピンを伸縮変位させるモータはそれぞれ別個のモータであり、それらのモータを連係制御するモータ制御手段を備えてなることによって、型換えに際して伸縮ピンの伸縮位置調整とピンホイール全体の容器搬送コンベヤに対する進退位置調整を同期して同時に行なうことができるので望ましい。
【0011】
また、伸縮ピンの先端部が容器から離れて搬送路外へ回転移動する位置に近接して、前記搬送路内を搬送される容器群の間に側方から進入し、前記容器群から先頭の所定数の容器群を切り離して容器搬送コンベヤより速い速度で所定距離押送した後、当該搬送路側方へ退避する動作を周期的に反復するセパレータバーを有する分離ユニットと、セパレータバーに押送される容器群の先頭の容器の直前に前記搬送路の側方から進入して前記セパレータバーとの間にこれらの所定数の容器群を挟んで前進移動した後、搬送路側方へ退避する動作を周期的に反復する抑えバーを有する抑えユニットを設けることによって、容器を確実に所定本数づつ区分けして送り出すことができ、下流側での包装工程等後工程の作業効率を高めることができる。
【発明の効果】
【0012】
請求項1に記載された発明に係る容器送出し装置によれば、搬送ラインを搬送される容器を直径の異なるものに変更する場合に、伸縮ピンが搬送路上の容器に適正位置で係合するように、伸縮ピンの突出長さを自動的に速やかに調整することができ、部材を交換することなく単一の容器送出し装置で直径の相違する容器の送出しに適合できるので、型替えが非常に簡単に短時間にできる。伸縮ピンの伸縮調整機構がピンホイール軸に沿って昇降変位する昇降体の変位をリンク部材を介して伸縮ピンの伸縮に変換しているので、機構が簡単であり、且つ伸縮ピンを確実に適正位置に変位させることができる。
また、請求項2に記載の発明によれば、伸縮ピンの伸縮調整機構として、ピンホイールベース上でモータで正逆両方向に同期回転される複数の回転伝動体の回転を昇降ネジ軸とナットを介して連結体に昇降変位として伝達し、これをさらにピンホイール軸に設けた昇降体に伝達し、昇降体の昇降変位を複数のリンク部材を介して各伸縮ピンの進退変位に変換しているため、カム等を用いることなく簡単な機構で構成でき、しかも伸縮ピンを駆動するモータをピンホイールベース側に設置でき、電気系統の配線接続構造が簡単である。
【0013】
請求項3に記載の発明によれば、搬送ラインを搬送される容器を直径の異なるものに変更する場合に、伸縮ピンが搬送路上の容器に適正位置で係合するように、伸縮ピンの突出長さと搬送路に対するピンホイールベースの位置とを自動的に速やかに位置決めすることができる。さらに、ピンホイール軸を支持するピンホイールベースを搬送路に対して進退変位させるためのモータからの駆動力伝達系と、ピンホイール軸を回転駆動するためのモータからの駆動力伝達系とが独立しているため、構造が簡単で耐久性と信頼性に優れた容器送出し装置を提供することができる。
【0014】
請求項4に記載された発明に係る容器送出し装置によれば、後工程において、容器を所定数ずつカートンにパックする場合等において、コンベヤで搬送される容器群を搬送中に所定数ずつに確実にグルーピングすることができ、且つグル−ピングの過程において容器が倒れるのを確実に防いで、次工程に送出すことができる。
【図面の簡単な説明】
【0015】
【図1】本発明に係る容器送出し装置が設けられている容器搬送ラインの概略平面図であり、小径の容器を3個ずつグルーピングしている容器搬送ラインの概略平面図である。
【図2】ピンホイールの伸縮ピンの伸縮状態を示す平面図である。
【図3】本発明に係る容器送出し装置の概略構造を示す平面図である。
【図4】図3のA−A位置から見た容器送出し装置の概略構造を示す側面図である。
【図5】図3のB−B位置から見た容器送出し装置の要部構造図である。
【図6】大径の容器を5個ずつグルーピングしている容器搬送ラインの概略平面図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態を図面に基づいて説明する。
図1は、本発明の容器送出し装置が設けられている容器搬送ラインの平面図であって、本実施形態における容器搬送ラインは、容器にアルコール飲料等の内容物を充填して封緘する前工程と、これらの容器を定数個ずつ紙カートンにパックする後工程との間に設けられており、ここを容器が通過する間に、前工程から連続して送られてくる容器群を、後工程のために所定の個数ずつグルーピングするためのラインである。しかしながら、本発明は、必ずしもそのようなラインに設けられるものに限るものではない。
【0017】
図1に示すように、容器搬送ライン1は、前工程から後工程へ容器Vを連続的に搬送する容器搬送コンベヤ2を有している。前記容器搬送コンベヤ2の搬送路2Aの搬送方向上流側の側方には、容器送出し装置3が設けられている。
【0018】
前記容器送出し装置3は、容器搬送コンベヤ2で搬送される容器Vに、側方から係合する多数の伸縮ピン4が放射状に設けられたピンホイール5を有している。前記ピンホイール5は、伸縮ピン4先端が、容器搬送コンベヤ2の搬送速度よりも遅い速度で回転し、隣り合う伸縮ピン4間に上流側から互いに当接した状態で搬送されてくる容器Vの搬送タイミングをここで整える役割を果たしている。
【0019】
これらの伸縮ピン4は、後述する機構により、ピンホイール5の径方向に伸縮自在になっており、図2の左半分に示すように、伸縮ピン4が収縮した位置では、隣接する伸縮ピン4の先端間で小径の容器Vに係合し、また、同図右半分に示すように、伸縮ピン4を伸長した位置では、大径の容器V’に係合することができるようになっている。
【0020】
また、図1においては詳細な構造の図示は省略しているが、取り扱う容器Vの大小に関わらず伸縮ピン4が、搬送路2Aの両側に設けられている一対のガイドレール2B間で案内される容器Vと適正に係合するように、ピンホイール5は、伸縮ピン4が伸長している場合には、搬送路2Aから離間した後退位置で回転し、また、伸縮ピン4が収縮している場合には、搬送路2Aに接近した前進位置で回転するように、搬送路2Aに対して進退自在な構造になっている。なお、前記一対のガイドレール2Bの間隔は、搬送する容器Vの外径に応じて調整できるようになっている。
【0021】
また、容器搬送ライン1のピンホイール5の下流側には、搬送路2A上を搬送される容器V群を後工程で紙カートンにパックする個数ずつにグルーピングするための、分離ユニット6と抑えユニット7が設けられている。分離ユニット6と抑えユニット7は、ピンホイール5で整えられた容器Vの搬送タイミングに合わせて駆動されるセパレータバー8と抑えバー9をそれぞれ有している。
【0022】
分離ユニット6は、容器送出し装置3と搬送路2Aを挟んだ反対側に設けられていて、セパレータバー8は、水平面内で平行した2組の無端状経路に沿って互いに同期して一方向に循環駆動される2組のローラチェーン6A、6Bのそれぞれに対して、垂直軸周りに回転自在に軸着されており、これらのローラチェーン6A、6Bの循環する経路に沿って水平面内で並進移動するようになっている。
【0023】
また、この実施形態のものにおいては、セパレータバー8は、これらのローラチェーン6A、6Bに等間隔に4カ所取り付けられており、また、ローラチェーン6A、6Bは、それぞれ図示していないサーボモータで回転駆動される駆動スプロケットを含んだ4つのスプロケットに掛け渡されている。
【0024】
これらのローラチェーン6A、6Bがそれぞれ掛け渡されているピンホイール5に近い側の2つのスプロケット6C、6Dは、他のスプロケットよりも直径が大きく、セパレータバー8の先端は、これらのスプロケット6C、6Dを通過するローラチェーン6A、6Bによって緩やかな円弧状の軌跡を描いて搬送路2Aに進入し、ピンホイール5の伸縮ピン4から離脱した直後の容器Vと後続の容器Vとの間に側方から割り込むようになっている。
【0025】
搬送路2Aに進入したセパレータバー8は、ピンホイール5の伸縮ピン4が容器Vを搬送路2Aの下流方向に押し出す速度よりも大きい速度で、先行するセパレータバー8との間隔Sよりやや長い区間を搬送路2Aと並行して移動し、その後、搬送路2A内から側方へ速やかに退避する運動を行う。なお、搬送路と並行する区間における前後のセパレータバー8の間隔Sは、後工程でパッケージする容器Vの最大個数分(例えば5個)の列の長さよりも長く設定してある。
【0026】
一方、抑えユニット7は、搬送路2Aに対して、容器送出し装置3と同じ側に配置されていて、抑えバー9は、前述した分離ユニット6のセパレータバー8と同様に、水平面内で平行した2組の無端状の経路に沿って互いに同期して一方向に循環駆動される2組のローラチェーン7A、7Bのそれぞれに対し、垂直軸周りに回転自在に軸着されており、これらのローラチェーン7A、7Bの循環する経路に沿って水平面内で並進移動するようになっている。
【0027】
抑えバー9は、搬送路2Aに側方から進入してセパレータバー8で押送される前記所定個数分の容器Vの先頭に当接し、前記セパレータバー8との間にこれらの所定個数の容器Vを間に挟み込んで一定の距離だけ当該セパレータバー8と同一速度で一体的に移動し、その後、搬送路2Aから側方へ退避する動作を行い、グルーピングされた容器Vどうしが搬送方向前後に当接した状態で後工程に搬送されるようにしている。
【0028】
なお、図1においては、抑えバー9は1つしか図示していないが、実際には、セパレータバー8が前記所定個数の容器Vを押送するタイミングに合わせるために、前記2組のローラチェーン7A、7Bのそれぞれに対して等間隔で複数個取り付けられている。また、図示していないが、これらのローラチェーン7A、7Bは、前述した分離ユニット6のサーボモータと連係して制御されるサーボモータで駆動されるようになっている。
【0029】
また、この実施形態においては、分離ユニット6のセパレータバー8や抑えユニット7の抑えバー9を、2組のローラチェーン6A、6B、7A、7Bに取り付けて一方向に循環駆動しているが、このような機構に限定するものではなく、セパレータバー8や抑えバー9が、搬送路2A内に側方から進入してから所定の区間、容器搬送コンベヤ2の搬送方向に等速度で移動した後、搬送路2Aから側方へ退避する運動を反復する機構であればよい。
【0030】
なお、抑えユニット7は、図示は省略してあるが、搬送路2Aの方向に移動自在な構造を備えていて、グルーピングする容器Vのサイズや個数に応じて設置位置を調整できるようになっている。
【0031】
次に、容器送出し装置3の構造を図面に基づいて詳細に説明する。図3及び図4に示すように、容器送出し装置3は、床面に設置された固定ベース10を備え、その上に、左右一対のリニアガイド機構11によって、搬送路2Aに対して進退変位自在に支持された、ピンホイールベース12を有している。
【0032】
また、固定ベース10には、左右一対のネジ軸13A、13Bが回転自在に軸受支持されており、これらのネジ軸13A、13Bには、ピンホイールベース12に固定されている一対のナット14A、14Bがそれぞれ螺合している。
【0033】
なお、図3においては、説明の都合上、ピンホイールベース12とネジ軸13A、13Bが重なって描かれているが、実際は、これらのネジ軸13A、13Bは、ピンホイールベース12の下方に配置され、また、これらのナット14A、14Bは、ピンホイールベース12の下面側に取り付けられている。
【0034】
前記一対のネジ軸13A、13Bは、固定ベース10に取り付けられている正逆両方向に回転自在なサーボモータ(第1のモータ)15により、歯付駆動プーリ16、歯付ベルト17、歯付被駆動プーリ18A、18Bを介して、同期して同方向に回転駆動され、これらのネジ軸13A、13Bにそれぞれ螺合するナット14A、14Bを介して、ピンホイールベース12が進退駆動されるようになっている。
【0035】
なお、一方のネジ軸13Bには、ピンホイールベース12を手動で進退させるための手動ハンドル19が取り付けられている。この手動ハンドル19は、サーボモータ15でピンホイールベース12を駆動する際には、図示しないクラッチ機構により、ネジ軸13Bならびに歯付被駆動プーリ18Bと連結を解除できるようになっている。
【0036】
図4に示すように、ピンホイールベース12上には支持ブラケット21が立設されており、この支持ブラケット21に設けられている軸受22Aとピンホイールベース12に設けられている軸受22Bとの間に、ピンホイール軸20が、その軸線を垂直にして回転自在に支持されている。
【0037】
ピンホイール軸20の途中部分の外周面にはスプライン溝が形成されており、この部分には筒状の昇降体23が昇降自在に装着されている。昇降体23の内周面には、前記スプライン溝と噛み合う内歯のスプライン溝が形成されていて、ピンホイール軸20に対してその軸線周りの昇降体23の回転が拘束されている。
【0038】
ピンホイール軸20の上端付近には、伸縮ピン保持体24が固定されている。伸縮ピン保持体24は円板状に形成されていて、その下面側に、放射状に配列されている複数の伸縮ピン4のそれぞれを、図示していないガイド機構を介してその径方向にスライド自在に支持している。
【0039】
また、ピンホイール軸20には、複数のリンク保持アーム25が固定されている。これらのリンク保持アーム25は、それぞれの伸縮ピン4に下方位置に対応するように、放射状に配置されていて、それぞれの先端部は下方に屈曲して下端どうしが連結環26で互いに連結されている。
【0040】
これらのリンク保持アーム25の先端付近には、それぞれベルクランク状のリンク部材27の屈曲部がリンク軸28で揺動自在に軸支されている。また、これらのリンク部材27の上方に伸びる腕の先端部には、スライド駒29が回動自在に軸支されている。
【0041】
一方、それぞれの伸縮ピン4の下面には、垂直ガイド部30が設けられていて、スライド駒29は、前記垂直ガイド部30に設けられた垂直方向の溝内にスライド自在に係合している。
【0042】
また、これらのリンク部材27の他方の腕の先端部には、スライド駒29と同様なスライド駒31が回動自在に軸支されており、それぞれのスライド駒31は、前述した昇降体23の上端部付近にそれぞれ形成されている水平ガイド部32に設けられた水平方向の溝内にスライド自在に係合している。
【0043】
前記昇降体23を昇降させるための昇降駆動手段は、本実施形態では以下のように構成されている。
昇降体23の下部外周には、軸受33を介して後述する連結体34が、昇降体23に対してピンホイール軸20の軸線周りに回転自在に連結されている。なお、前記軸受33は主にスラスト荷重を受けるため、スラスト負荷に対応できる軸受を使用している。
【0044】
図4に示すように、連結体34の下面には、一対の昇降ネジ軸35が垂直に固定されており、これらの昇降ネジ軸35は、ピンホイールベース12にそれぞれ軸受36で垂直軸線周りに回転自在に保持されている一対のナット37に螺合している。
【0045】
これらのナット37の外周にはそれぞれ、ピンホイールとしての歯付プーリ37Aが一体に設けられていて、図3に示すように、これらの歯付プーリ37Aと、サーボモータ38の回転軸に固定されている歯付駆動プーリ39間には歯付ベルト40が掛け渡され、サーボモータ38を正逆何れかの方向に回転すると、これら歯付プーリ37Aがナット37と一体に同方向に同期して回転するようになっている。
【0046】
従って、サーボモータ38を正逆何れかの方向に駆動すると、ナット37に螺合している昇降ネジ軸35が連結体34を介して昇降体23を上昇または下降させる。昇降体23の昇降変位は、リンク部材27を介して各伸縮ピン4に伝達され、その結果、昇降体23が上昇するとそれぞれの伸縮ピン4は一斉に伸長し、昇降体23が下降するとこれらの伸縮ピン4は一斉に収縮する。なお、図5において、34’は連結体に固定されたガイドロッドであり、下方部がスライドベース12に上下摺動自在に軸受けされ、連結体34がボールネジ機構により上下動する際のガイドの役割を果たすとともに、ピンホイール5の回転に際してのガタ付きを防止する補強の役割を果たしている。
【0047】
なお、昇降ネジ軸35を歯付プーリ37Aと一体にしてピンホイールベース12に回転自在に設け、ナット37を連結体34に固定してもよい。また、ピンホイールを歯付プーリ37Aに代えて歯車で構成し、サーボモータ38の回転を歯車列を介してこれらのピンホイールに伝達するようにしてもよい。
【0048】
図4及び図5に示すように、ピンホイール軸20の下端部には、トルクリミッタ41を介して歯付プーリ42が取り付けられている。一方、ピンホイールベース12には、サーボモータ43が取り付けられていて、その駆動軸に固定された歯付プーリ44と前記歯付プーリ42との間には、歯付ベルト45が掛け渡されており、サーボモータ43を回転駆動することにより、歯付プーリ42からトルクリミッタ41を介してピンホイール軸20が回転駆動されるようになっている。
【0049】
その際、ピンホイール軸20に作用する負荷トルクが所定の許容値を超えた場合には、トルクリミッタ41の働きによって、歯付プーリ42がピンホイール軸20に対して空転することで、伸縮ピン4やこれに係合して搬送される容器Vの破損を防ぐことができる。
【0050】
図5の左半分に示すように、小径の容器Vを取り扱う場合には、伸縮ピン4は収縮させた状態であり、この場合には、伸縮ピン4の先端部が容器Vと適正位置で係合するように、固定ベース10に対してピンホイールベース12を図3に示すように、搬送路2A側へ接近させた位置に移動させる。
【0051】
一方、大径の容器を取り扱う場合には、伸縮ピン4を伸長させるとともに、ピンホイールベース12は、搬送路2Aから離間させる。なお、本実施形態においては、伸縮ピン4の伸縮とピンホイールベース12の進退は、図示していないモータ制御手段によって、サーボモータ15とサーボモータ38とを連係させて連動させている。従って、型替えに際して、単に所定の型替えボタンを押圧することによって、ピンホイールベースの進退と伸縮ピンの伸縮が同期して行なわれ、一動作で型替えが完了することができる。
【0052】
本実施形態においては、小径の容器Vと大径の容器V’の2種類で説明しているが、モータ制御手段に、直径の異なる容器毎に対応するサーボモータ15とサーボモータ38の回転角度を任意にプログラミングできるものを用いれば、所望の直径の容器に適合するように、伸縮ピン4の進退動作とピンホイールベース12の進退動作とを自動的に連係して位置調整することができる。
【0053】
図6は、前述した容器搬送ライン1において、大径の容器V’を5個ずつにグルーピングしている状態を示す平面図であって、この場合には、図1に示す容器Vを3個ずつにグルーピングする場合と、ピンホイール5が容器V’を送るタイミングは変わらないが、分離ユニット6のセパレータバー8を循環速度を低下させて、ピンホイール5の伸縮ピン4から送り出された容器V’群を5個ずつ切り出し、同時に抑えユニット7の抑えバー9の循環速度もこれに応じて低下させている。
【0054】
この場合、伸縮ピン4は伸長させ、且つ、ピンホイールベース12を図3の位置とは逆に、搬送路2Aから離した位置に移動させ、また、グルーピングする容器Vの数が増加した分、抑えユニット7を容器送出し装置3から搬送方向下流側へ離間させてある。
【0055】
なお、前述した実施形態においては、容器送出し装置3は、容器搬送コンベヤ2の一方の側に1台配置しており、また、搬送路2Aを容器Vが一列に並んで搬送されているが、本発明の容器送出し装置は、本実施形態に限定するものではなく、容器を2列並べて搬送路を搬送する場合には、容器送出し装置を搬送路の両側に2台対称的に配置して使用してもよい。
【0056】
また、前述した実施形態においては、容器送出し装置3の搬送方向下流側に分離ユニット6と抑えユニット7を配置して、容器Vのグルーピングを行っているが、本発明の容器送出し装置3の用途は、これに限定するものではなく、例えば、後工程で容器を受け入れるスターホイール等の回転に、容器の搬送タイミングを同期させるために用いることができる。
【産業上の利用可能性】
【0057】
本発明の容器送出し装置は、容器搬送コンベヤ上を搬送される容器の搬送タイミングを後続の工程の処理タイミングに合わせる場合に利用することができ、特に、コンベヤで搬送される容器群を、搬送中に所定個数ずつにグルーピングする搬送ラインにおいて、好適に利用することができる。
【符号の説明】
【0058】
1 容器搬送ライン
2 容器搬送コンベヤ
2A 搬送路
2B ガイドレール
3 容器送出し装置
4 伸縮ピン
5 ピンホイール
6 分離ユニット
6A、6B ローラチェーン
6C、6D スプロケット
7 抑えユニット
8 セパレータバー
9 抑えバー
10 固定ベース
11 リニアガイド機構
12 ピンホイールベース
13A、13B ネジ軸
14A、14B ナット
15 サーボモータ(第1のモータ)
16 歯付駆動プーリ
17 歯付ベルト
18A、18B 歯付被駆動プーリ
19 手動ハンドル
20 ピンホイール軸
21 支持ブラケット
22A、22B 軸受
23 昇降体
24 伸縮ピン保持体
25 リンク保持アーム
26 連結環
27 リンク部材
28 リンク軸
29、31 スライド駒
30 垂直ガイド部
32 水平ガイド部
33 軸受
34 連結体
35 昇降ネジ軸
36 軸受
37 ナット
37A 歯付プーリ(ピンホイール)
38 サーボモータ(第3のモータ)
39 歯付駆動プーリ
40 歯付ベルト
41 トルクリミッタ
42 歯付プーリ
43 サーボモータ(第2のモータ)
44 歯付プーリ
45 歯付ベルト
【特許請求の範囲】
【請求項1】
ピンホイールベース上に垂直な軸線周りに回転自在に支持され、モータにより回転駆動されるピンホイール軸と、前記ピンホイール軸に対してその軸線周りの回転が拘束され、且つ昇降変位自在に設けられた昇降体と、該昇降体を昇降駆動する昇降駆動手段と、前記ピンホイール軸に対して、円周方向に等間隔で放射状に、且つそれぞれ径方向に進退自在に設けられた複数の伸縮ピンからなるピンホイールと、前記それぞれの伸縮ピンと前記昇降体との間に設けられ、前記ピンホイール軸に対する前記昇降体の昇降変位を各伸縮ピンの進退変位に変換する複数のリンク部材とを備えたことを特徴とする容器送出し装置。
【請求項2】
前記昇降駆動手段が、前記昇降体に対して前記ピンホイール軸の軸線周りに回転自在に連結された連結体と、前記ピンホイールベースに対して、前記ピンホイール軸とそれぞれ並行する軸線周りに回転自在に支持され、モータにより互いに同期して正逆両方向に回転駆動される複数の回転伝動体と、前記それぞれの回転伝動体と前記連結体の何れか一方に、当該回転伝動体と同心に設けられたナットと、前記それぞれの回転伝動体と前記連結体の何れか他方に、前記回転伝動体と同心に設けられて前記ナットと螺合する昇降ネジ軸とから構成されていることを特徴とする請求項1に記載の容器送出し装置。
【請求項3】
前記ピンホイールベースが、容器搬送コンベヤの搬送路側方に近接して設けられる固定ベース上に、前記搬送路に対して進退変位自在に支持され、モータにより進退駆動されるように構成され、前記伸縮ピンの先端が、搬送路上の容器に対して適正な係合位置を保つように、前記ピンホイールベースを進退変位させるようにしてなり、前記固定ベースを進退駆動するモータと前記伸縮ピンを伸縮変位させるモータはそれぞれ別個のモータであり、それらのモータを連係制御するモータ制御手段を備えてなることを特徴とする請求項1又は2に記載の容器送出し装置。
【請求項4】
前記伸縮ピンの先端部が容器から離れて搬送路外へ回転移動する位置に近接して、前記搬送路内を搬送される容器群の間に側方から進入し、前記容器群から先頭の所定数の容器群を切り離して容器搬送コンベヤより速い速度で所定距離押送した後、当該搬送路側方へ退避する動作を周期的に反復するセパレータバーを有する分離ユニットと、前記セパレータバーに押送される容器群の先頭の容器の直前に前記搬送路の側方から進入して前記セパレータバーとの間にこれらの所定数の容器群を挟んで前進移動した後、搬送路側方へ退避する動作を周期的に反復する抑えバーを有する抑えユニットが設けられていることを特徴とする請求項1〜3何れかに記載の容器送出し装置。
【請求項1】
ピンホイールベース上に垂直な軸線周りに回転自在に支持され、モータにより回転駆動されるピンホイール軸と、前記ピンホイール軸に対してその軸線周りの回転が拘束され、且つ昇降変位自在に設けられた昇降体と、該昇降体を昇降駆動する昇降駆動手段と、前記ピンホイール軸に対して、円周方向に等間隔で放射状に、且つそれぞれ径方向に進退自在に設けられた複数の伸縮ピンからなるピンホイールと、前記それぞれの伸縮ピンと前記昇降体との間に設けられ、前記ピンホイール軸に対する前記昇降体の昇降変位を各伸縮ピンの進退変位に変換する複数のリンク部材とを備えたことを特徴とする容器送出し装置。
【請求項2】
前記昇降駆動手段が、前記昇降体に対して前記ピンホイール軸の軸線周りに回転自在に連結された連結体と、前記ピンホイールベースに対して、前記ピンホイール軸とそれぞれ並行する軸線周りに回転自在に支持され、モータにより互いに同期して正逆両方向に回転駆動される複数の回転伝動体と、前記それぞれの回転伝動体と前記連結体の何れか一方に、当該回転伝動体と同心に設けられたナットと、前記それぞれの回転伝動体と前記連結体の何れか他方に、前記回転伝動体と同心に設けられて前記ナットと螺合する昇降ネジ軸とから構成されていることを特徴とする請求項1に記載の容器送出し装置。
【請求項3】
前記ピンホイールベースが、容器搬送コンベヤの搬送路側方に近接して設けられる固定ベース上に、前記搬送路に対して進退変位自在に支持され、モータにより進退駆動されるように構成され、前記伸縮ピンの先端が、搬送路上の容器に対して適正な係合位置を保つように、前記ピンホイールベースを進退変位させるようにしてなり、前記固定ベースを進退駆動するモータと前記伸縮ピンを伸縮変位させるモータはそれぞれ別個のモータであり、それらのモータを連係制御するモータ制御手段を備えてなることを特徴とする請求項1又は2に記載の容器送出し装置。
【請求項4】
前記伸縮ピンの先端部が容器から離れて搬送路外へ回転移動する位置に近接して、前記搬送路内を搬送される容器群の間に側方から進入し、前記容器群から先頭の所定数の容器群を切り離して容器搬送コンベヤより速い速度で所定距離押送した後、当該搬送路側方へ退避する動作を周期的に反復するセパレータバーを有する分離ユニットと、前記セパレータバーに押送される容器群の先頭の容器の直前に前記搬送路の側方から進入して前記セパレータバーとの間にこれらの所定数の容器群を挟んで前進移動した後、搬送路側方へ退避する動作を周期的に反復する抑えバーを有する抑えユニットが設けられていることを特徴とする請求項1〜3何れかに記載の容器送出し装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−269912(P2010−269912A)
【公開日】平成22年12月2日(2010.12.2)
【国際特許分類】
【出願番号】特願2009−124308(P2009−124308)
【出願日】平成21年5月22日(2009.5.22)
【出願人】(506100990)日本トーカンパッケージ株式会社 (41)
【Fターム(参考)】
【公開日】平成22年12月2日(2010.12.2)
【国際特許分類】
【出願日】平成21年5月22日(2009.5.22)
【出願人】(506100990)日本トーカンパッケージ株式会社 (41)
【Fターム(参考)】
[ Back to top ]