
容器配列ピッチ調整装置
【課題】部品交換等の型替作業が無く、容器の傷付きを最小限に抑え、しかも容器の形状の変化にソフトウエアにより対応できる自由度の高いピッチ調整装置を提供する。
【解決手段】上流側容器配列の先頭から順次、コンベアの両端に設置した一対のプロペラを交互に間欠駆動させ、コンベアの移動方向とプロペラのコンベア面上の回転方向を一致させ容器に傷付きが無いようにしてプロペラにより所定の間隔で停止、解放を間欠的に行い所定のピッチ間隔とすることを特徴とする容器配列ピッチ調整装置。
【解決手段】上流側容器配列の先頭から順次、コンベアの両端に設置した一対のプロペラを交互に間欠駆動させ、コンベアの移動方向とプロペラのコンベア面上の回転方向を一致させ容器に傷付きが無いようにしてプロペラにより所定の間隔で停止、解放を間欠的に行い所定のピッチ間隔とすることを特徴とする容器配列ピッチ調整装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送用コンベアの上流側容器列を所定ピッチ間隔配列の下流側容器列として搬送させる容器列間隔のピッチ調整装置に関する。
【背景技術】
【0002】
従来の技術として、らせん状に溝を掘った「スクリュー」を容器搬送用コンベア等と並行に設置して、そのスクリューを回転させ、一方上流から移動する容器の列を一個毎にスクリューのらせん溝に入るようにして搬送させることにより、上流側の押せ押せ状態或いは間隔が狭くランダムに配列した容器或いは物品を、所定のピッチ間隔の配列で下流側に送り出し、下流側の次の工程の機械などへ供給する構成があった。特許文献1はスクリューを用いた容器供給装置に係る発明である。
【0003】
しかしながら、ピッチ調整を行う容器列の容器の種類、例えば容器の円筒形状の外周径の変更或いは容器の断面形状が変わる毎にその形状に対応した溝のスクリューを製作する必要がある。また、同じ容器であっても配列のピッチが変わればその都度スクリューを製作する必要がある。このため、多品種の容器を扱う場合、スクリュー交換部品を多数制作、保管しなければならない問題があった。
【0004】
以上のように、容器種類変更の度にスクリューを交換する作業は調整工程もあり稼働率を下げる要因となっていた。さらに、下流側での工程を行う後続機の取入れヘッド数、処理能力が異なる場合、容器列の供給ピッチを変更する必要がある。その場合もその関係する部品の製作、型替作業が必要となっていた。
【0005】
この方式では、スクリューの回転につれて容器はコンベア上を水平移動するので、容器表面を摺ることとなり、傷付きが発生することがあった。
【0006】
また、従来、水平方向に回転する円盤の外周に沿って、掘り込み溝を設けた「コントロールホイール」をコンベア横に設置した構成の発明が開示されていた。
【0007】
しかしながら、前述の「スクリュー」構成の場合と同様に、容器或いは物品が変わる毎にそれに対応した「コントロールホイール」を製作する必要があった。
【0008】
兼用型のコントロールホイールとしたい場合は、角度の変更は困難なので、容器が大きくなったときは隣同士の間隔を広げる必要があるのでホイールの爪の長さを伸ばすこととなる。
【0009】
その場合、円盤中心から、爪先端までの距離が長くなるため、その分コントロールホイール全体をずらして軸中心を移動させる必要があり、そのための調整作業が必要となり且つ複雑な構成となっていた。このため、「スクリュー」あるいは「コントロールホイール」のいずれの場合も構成としては問題点が多くあった。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2005−212949号公報(第2、3頁、第1図)
【発明の概要】
【発明が解決しようとする課題】
【0011】
部品交換等の型替作業がなく容器の傷付きを最小限に抑え、しかも容器の形状の変化にソフトウエアにより対応できる自由度の高いピッチ調整装置を提供することを目的とする。
【0012】
このため、従来の「スクリュー」、「コントロールホイール」などの構成に替えて、「一対のプロペラ」をそれぞれ独立に駆動する2台の駆動部を制御して回転させて、上流側容器列を所定のピッチ間隔の容器配列に変えて下流側へ送り出す方式の装置を提供する。
【課題を解決するための手段】
【0013】
本発明の容器列ピッチ調整装置は、搬送用コンベアの上流側容器列を、所定ピッチ間隔配列の下流側容器列として搬送させるピッチ調整装置であって、前記コンベアの両側端に対向して設けられ、そのコンベア上を移動する各容器を所定位置で停止或いは解放させる水平方向に独立して間欠回転する1対のプロペラと、その一対のプロペラをそれぞれのシャフトを介して制御信号により独立駆動させる2台の駆動部と、前記搬送用コンベア周辺に設けられた複数の容器位置センサからの受信及び前記2台の駆動部へ制御信号を送信する制御部と、から少なくとも構成されることを特徴とする。
【0014】
また、前記一対のプロペラは、それぞれ等間隔の複数枚の羽根からなり、前記搬送用コンベア面上におけるそれらプロペラの羽根の回転方向は、そのコンベアの進行方向に合わせて、一対のプロペラは互いに反対方向へ前記駆動部により間欠回転されることを特徴とする。
また、前記等間隔の複数枚の羽根は軸対称の2枚の羽根であることを特徴とする。
【0015】
また、前記一対のプロペラシャフトの中心軸を通る垂直平面が前記ベルトコンベア上面と交わる直線を、前記上流側容器列の各容器を一時停止させる容器停止位置線とし、その停止位置線よりも上流側にあって、容器の通過を検出する容器位置センサーを備え、前記制御部は、その位置センサからの検出信号を受け、先行する容器の中心軸が停止位置線にあると判定したときは、前記2台の駆動部へそれぞれ駆動信号を送信する容器停止プログラム手段を備えることを特徴とする。
【0016】
また、前記制御部の容器停止プログラム手段は、前記一対のプロペラの一方のプロペラが容器停止位置線上にある前記容器の進行方向の側面部で進行を抑え、他方のプロペラがその容器と次の配列容器の間に入り次の配列容器の進行を抑えると共に停止位置線上にある容器を両プロペラで挟み、各プロペラ羽根の中心線と停止位置線となす角度は等しく且つ反対方向の角度(+θ、−θ)である状態とすることを特徴とする
【0017】
また、前記各プロペラ羽根の中心線と停止位置線とのなす角度(+θ、−θ)は、容器列の容器の形状と、コンベア両側端のプロペラ回転軸のシャフト間隔Dとにより定まり、使用する予定の容器の形状とそれに対応した角度(+θ、−θ)との関係データを前記制御部のメモリーに予め記録する記憶部を備え、制御部の前記容器停止プログラム手段は、更に一意的に容器形状に対応した制御信号を前記2台の駆動部へそれぞれ送る手段を備えることを特徴とする。
【0018】
また、前記制御部は、前記停止位置線上にある上流側容器列の容器と、進行方向に移動している先行容器とのピッチ間隔が所定ピッチ長Pに達した位置に設けた検出用の位置センサからの検出信号を受け、又は容器を搭載し移動しているコンベア駆動部の回転量(回転角度)を変換した電気信号値を受けて、前記先行容器とのピッチ間隔が所定ピッチ長Pであると判定したときは前記2台の駆動部のそれぞれに送信する容器解放プログラム手段を備えることを特徴とする。
【0019】
また、前記制御部の容器解放プログラム手段は、前記一対のプロペラにおいて、前記停止位置線上のその上流側容器列の容器の進行方向前部を抑えている一方のプロペラを回転させて、その容器を解放し、先行容器とのピッチ間隔Pを維持するように進行させると共に、他方のプロペラを回転させて、後続する容器を前記所定容器停止位置線上に移動させてその他方のプロペラによりその容器を停止させ、前記一方のプロペラとにより後続する容器を挟み、各プロペラ羽根の中心線と停止位置線とのなす角度は等しく且つ反対方向の角度(+θ、−θ)である状態とすることを特徴とする。
また、前記コンベアの両端部に前記一対のプロペラの各駆動部を固定する駆動部固定台を設け、前記各駆動部は、それぞれの固定台に取り付けるに際してコンベアに対し直交方向又は平行方向にずらして固定できる二次元方向シャフト位置調整可能であることを特徴とする。
【発明の効果】
【0020】
本発明の容器配列ピッチ調整装置は以下に示す効果を奏する。
【0021】
(1)上流側容器列の容器間隔がないか或いは押せ押せ状態になっている場合、一対のプロペラの回転を制御して独立に行わせることにより容易に所定ピッチ間隔で下流側へ送り出すことができる。
【0022】
(2)その一対のプロペラのそれぞれの回転方向は容器を搬送するコンベアの進行方向に合わせているため(回転方向は互いに逆向きである)、従来のように容器表面に傷をつける恐れがない。
【0023】
(3)容器列の形状(例えば径のサイズ、楕円などの形状)が変わっても、制御部からプロペラの駆動部へ送る制御データの設定変更のみで対応することができる。すなわち制御部のメモリーに容器を一対のプロペラで挟むときの各プロペラと容器停止位置線との角度θを予め記憶させておき、そのデータの設定変更のみでさまざまな容器にソフトウエアにより対応できる。機械的な型替作業は不要となり、稼働率の低下を抑えることができる。
【0024】
(4)ピッチ変更の場合も同様にソフトウエアにより対応できる。ピッチ長Pも予め制御部のメモリーに記憶させておき、その制御データの設定変更のみで下流側の容器配列のピッチ間隔Pを変えることができるので、機械的な型替作業は不要となる。
【0025】
(3)と(4)とを予めデータ設定しておけばボタン操作等のみで処理でき、物理的な交換作業が不要であり、稼働率を殆ど低下させない。
【図面の簡単な説明】
【0026】
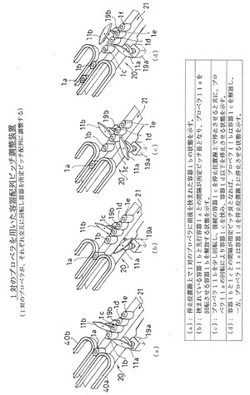
【図1】一対のプロペラを用いた容器配列ピッチ調整装置を示す斜視図である。
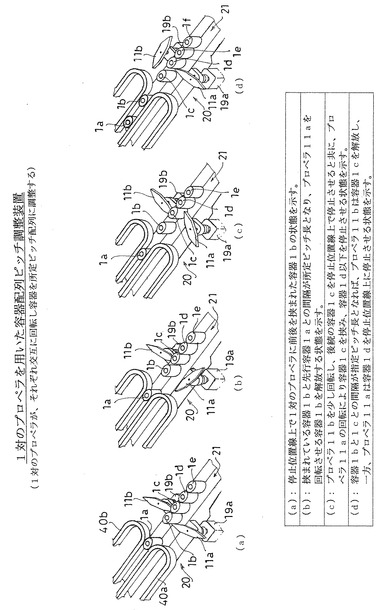
【図2】各種容器サイズ・形状に対応する容器配列ピッチ調整装置の平面図である。
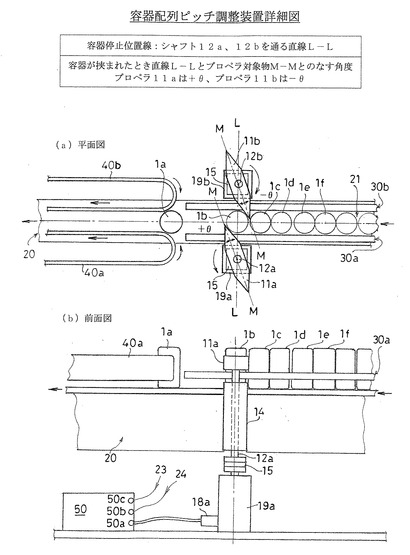
【図3】容器配列ピッチ調整装置の詳細を示し、(a)は平面図、(b)は前面図である。
【図4】容器配列ピッチ調整装置の詳細を示す側面図である。
【図5】容器配列ピッチ調整装置の詳細を示す図である。
【図6】複数の羽根の構造を示す平面図である。
【発明を実施するための形態】
【0027】
本発明の容器配列ピッチ調整装置の実施例について、以下、図に基いて説明する。
【0028】
図1は、ピッチ調整装置10の一対のプロペラ11の動作原理を示す。1a、1b、1c、1d、1e、・・・は容器列を示し、20は搬送用コンベア機構、21はそのコンベアの上面側ベルトを示す。その上面側21へは上流側から容器列1a〜1e・・・が搬送されている状態を示す。
【0029】
上流側の容器列は図に示すように容器間隔が無い状態で移動する。
【0030】
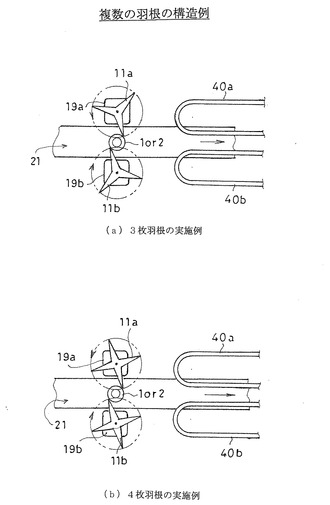
図1の一対のプロペラ11は、搬送用コンベア機構20の両側端に立設し、それぞれ独立に間欠的逆回転する11a、11bのプロペラからなる。それらプロペラ11a、11bはそれぞれの回転軸であるシャフト12a、12bを介して回転駆動させる2台の駆動部19a、19bに接続している。実施例ではプロペラ11は軸対象の二枚の羽根としたが図6に図示した3又は4枚羽根でもよい。
【0031】
搬送用コンベア機構20の下流側には前記一対のプロペラ11によって所定ピッチ間隔Pの容器配列を維持して移動搬送させるための下流側容器列搬送機構40がある。
【0032】
その下流側容器列搬送機構40は上面側21の上部にあり容器或いは物品を両側から挟むように両側にそれぞれ一対の回転ベルト40a、40bから少なくとも構成される。
【0033】
搬送用コンベアと同じ移動速度で回転ベルト40a、40bを回転させていると共に、その間に入る容器列を一対のプロペラ11で所定のピッチ間隔Pとした容器配列が維持されるようにその回転ベルト40a、40bの間に挟まれて移動する。
【0034】
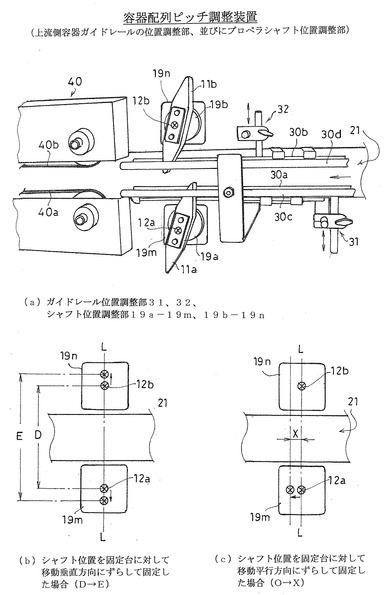
尚、上流側には、図1では図示していないが、容器列がコンベア中心部を移動するように、その両側にガイドレール部30がある(図3、図5(a)参照)
【0035】
図5(a)に示すようにガイドレール部30は、両側に2対の丸棒30a、30b、30c、30dからなる。一対の30a、30bはプロペラ上側に、他の一対の30c、30dはプロペラの下側にあり、そのプロペラ11a、11bはガイドレール30の間を水平方向に回転して、容器の停止・解放を行う。
【0036】
尚、ガイドレール部30の各対の間の容器が通る間隔幅は、容器の外周の大きさ、形状によって定める。図5(a)の31、32は各ガイドレールの進行方向に垂直な方向のレール位置を調整するガイドレール位置調整部を示す。
尚、プロペラシャフト位置調整部については後述する。
【0037】
また、図3のガイドレール部30の場合は一対のプロペラ11の下側に1対のみ丸棒30a、30bがある場合を示す。
【0038】
次に、図1に戻りこの一対のプロペラ11の動作原理を説明する。
【0039】
図1は間隔無し或いは少ない間隔のランダムピッチに配列した容器列1a、1b、1c、1d、1e・・・・が搬送用コンベア機構20のコンベア上面側21に載って上流側から搬送されてくる場合を示す。
【0040】
図1(a)は、容器列の先頭容器1aが下流側所定ピッチ容器列搬送機構40の一対の回転ベルト40a、40bの間に挟まれ、その機構40の入り口から下流側に送り込まれる状態を示す。
【0041】
この状態で後続の容器列1b、1c、1d、1e・・・は、プロペラ11aによって移動を停止させられている。尚、プロペラ11bは容器列の1bと1cの間に入り、1c及びそれに続く容器を停止させている。
ここで詳しくは、プロペラ11a,11bの各軸中心を結ぶコンベア上面の容器停止線よりも上流側にあり、容器の通過を検出する容器位置センサー23を備える。制御部50はその検出信号を受け先行する容器が前記停止位置線にあると判定したときは容器1bを停止させる。(容器停止プログラム手段)
【0042】
以上の図1(a)の状態で容器1aは下流側に移動し、容器1aと1bとの中心軸間隔が所定の距離(ピッチP)となると、搬送用コンベア機構20上部或いは容器列搬送機構40側部に設けられた容器位置センサ24から制御部50の位置センサ入力端子50bへ信号が送られ、制御部50のCPUはこの信号を受けて駆動部19aに信号を送り、まず容器列の先端になる容器1bを抑えているプロペラ11aを回転させる(反時計方向)。(第1の容器解放プログラム手段)
又は、以下に示す第2の容器解放プログラム手段でもよい。即ち、容器がコンベア上に搭載され移動させるそのコンベア駆動部モータなどの回転角度を所定時間毎の変換器に入力し、制御部50は変換出力値を受けて容器1aが所定の距離(ピッチP)先行したか判定するようにしてもよい。回転角度の検出には市販されているロータリーエンコーダなどが利用できる。
【0043】
図1(b)にその状態を示す。図1(b)はプロペラ11aが回転し、よって容器1bが解放されて搬送機構40へ向かって移動する状態を示す。
【0044】
プロペラ11aが180度弱回転している間はプロペラ11bは容器1c、1d、1e・・・以後の容器列を停止させている。つまり、プロペラ11bは回転しない。
【0045】
ここで容器列の容器11bが停止していた搬送用コンベア機構20の上面側21上における位置が一対のプロペラ11a、11bのシャフト12a、12bの中心線を通る垂直面と交わる停止直線上にあるようにする。
【0046】
すなわち、制御部50は停止位置直線上の容器はプロペラ11a、11bの回転停止位相角度がそれぞれ+θ、−θとなるように調整しておく。
【0047】
その停止位相角度(+θ、−θ)は、シャフト12a、12bの間隔D、容器1の外周直径、プロペラ11a、11bの羽根の形状などで定まる値である。
【0048】
前述したプロペラ11aの180度弱の回転は、正確には(180−2θ)度である。
【0049】
一方、図1(b)のプロペラ11bは、プロペラ11aと反対方向(時計回り)に回転し、プロペラ11aと2θ度だけ位相角が遅れるようにして、容器列の先頭容器の前後が挟まれる形状となる。
【0050】
図1(b)の最終状態ではプロペラ11aが容器1cと1dの間に入ると同時にプロペラ11bが2θ度だけ回転し、容器1cは前記停止位置直線上に移動して停まる。
【0051】
上記の状態を図1(c)に示す。図1(a)と比較すると、プロペラ11a、11bが入れ替わった状態となっている。
【0052】
ここで、容器1bは容器1aに所定のピッチP長を保って上流側へ移動する。その容器1bが移動し、今停止している容器1cとの間隔が所定のピッチ間隔Pとなれば、容器1cは開放される。
【0053】
制御部50のCPUは容器位置センサ24からの信号を位置センサ入力端子50bからその信号を受け、又は変換器などの信号を受け、プロペラ11bの駆動部19bへ信号を送り、プロペラ11bを時計方向へ(180−2θ)度回転させると共に、プロペラ11aの駆動部19aへ信号を送り2θ度回転させる。
【0054】
図1(d)は上記途中の状態を示し、プロペラ11bは90度回転しその間にプロペラ11aは2θ度回転している状態を示す。
【0055】
図1(d)の動作の最終状態は図1(a)の状態に戻る。
【0056】
すなわち(a)−>(b)−>(c)−>(d)−>(a)−>(b)・・・を繰り返す。
【0057】
その一対のプロペラ11の駆動部19a、19bは例えばサーボモータ等を使用し、制御部50から駆動部19a、19bへの制御信号により容易に一対のプロペラ11を図1のように動作させることができる。
【0058】
図3には図1の詳細が示してある。
【0059】
前述したように、前記停止位相角(+θ、−θ)の角度は少なくとも容器の外周の大小により、その停止位相角(+θ、−θ)の角度を変えなければならない。
【0060】
シャフト間隔D及びプロペラ11a、11bの羽根の形状が一定であっても、容器の外周が変われば、それに対応した停止位相角(+θ、−θ)の角度を制御部50のメモリーに予め記憶させ、図2に示すように容器列1、2、3のそれぞれに対応した停止位相角(+θ、−θ)で容器を停止させる。
【0061】
図2(イ)は円筒状容器1、図2(ロ)は円筒状容器2(容器1に比較して直径が大きい場合)、図2(ハ)は楕円状容器3の場合を示す。その都度θの値が変わることが明らかである。
【0062】
図3は、停止位相角(+θ、−θ)と、シャフト12a、12b、間隔Dと、プロペラ11a、11bの羽根形状との関係を示す。(+θ、−θ)の角度は図3に示す作図によってその値は容易に求められる。
【0063】
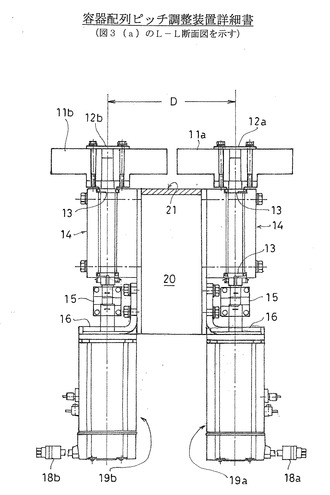
尚、図3(a)は平面図、図3(b)は前面図を示す。さらに図3(a)のL−L断面を図4に示す。ここで、12a、12bはシャフト、13はベアリング軸受け、14はベアリングケース,19a、19bは駆動部、18a、18bは制御端子、15はその駆動部に一対のプロペラの各シャフト12a、12bに着脱自在に結合するカップリングである。
【0064】
16はブラケットであり、これらブラケット16の間に搬送用コンベア機構20があり、その上面側の上を容器列が移動している。
【0065】
図3(b)の前面図はその容器列の搬送状態を示したものである。
【0066】
図3(a)のL−L線は容器停止位置線であり、また、この図は容器1bが一対のプロペラで進行方向の前後を挟んだ状態を示す。図中の+θ、−θはプロペラの羽根の中心対象線M−Mと、容器停止位置線L−Lとのなす角度である。
【0067】
図4には容器を図示していない。また、図中のDの値はシャフト12a、12bの間隔長を示す。
図5(a)には、そのシャフト位置調整部について一実施例を図示してある。ここで、19m,19nはシャフト駆動部19a,19bを搭載して機械的に固定する固定台を示す。その固定台19m,19nに対して駆動部19a,19bをスライドして固定する。よって図5(b)に示すようにシャフト12a,12bの位置を容器進行に直交する方向にずらしてその間隔長Dを調整できる。さらに、図5(c)に示すように容器進行方向にいずれかのシャフト位置をずらして容器停止位置線の間隔を0からX長に調整できる。以上の二次元方向シャフト調整機構により容器物品の形状、大きさに容易に、短い作業時間で対応できる。
尚、固定台19m,19nと駆動部19a,19bの間に市販されている二次元方向に微調整できるマイクロメータを設けてもよい。
【0068】
尚、制御部50はCPU、メモリー部、前記センサ等のI/Fを含む入力端子部、前記2台の駆動部への出力端子部、表示部、それらを連結する内部バスから少なくとも構成され、そのCPUは少なくとも前記容器停止プログラム手段、容器解放プログラム手段を備えている。
【符号の説明】
【0069】
1、2、3 容器
1a、1b、1c・・・ 容器列(容器)
10 ピッチ調整装置
11 一対のプロペラ
11a、11b プロペラ
12a、12b シャフト
13 ベアリング軸受け
14 ベアリングケース
15 カップリング
16 ブラケット
18a、18b 制御端子
19a、19b 駆動部
19m、19n 駆動部固定台
20,21 搬送用コンベア機構、その上面側
22 コンベア側面側フレーム
23 停止線上流側容器位置センサ
24 停止線下流側容器位置センサ
30 ガイドレール部
30a、30b、30c、30d 丸棒
31,32 ガイドレール位置調整部
40 下流側容器列搬送機構
40a,40b 回転ベルト
50 制御部
50a 制御信号端子
50b、50c 位置センサ入力端子
100 基板
P ピッチ間隔
θ 停止位置角度
D 対シャフト位置間隔
X コンベア並行方向のシャフト位置のずれ
【技術分野】
【0001】
本発明は、搬送用コンベアの上流側容器列を所定ピッチ間隔配列の下流側容器列として搬送させる容器列間隔のピッチ調整装置に関する。
【背景技術】
【0002】
従来の技術として、らせん状に溝を掘った「スクリュー」を容器搬送用コンベア等と並行に設置して、そのスクリューを回転させ、一方上流から移動する容器の列を一個毎にスクリューのらせん溝に入るようにして搬送させることにより、上流側の押せ押せ状態或いは間隔が狭くランダムに配列した容器或いは物品を、所定のピッチ間隔の配列で下流側に送り出し、下流側の次の工程の機械などへ供給する構成があった。特許文献1はスクリューを用いた容器供給装置に係る発明である。
【0003】
しかしながら、ピッチ調整を行う容器列の容器の種類、例えば容器の円筒形状の外周径の変更或いは容器の断面形状が変わる毎にその形状に対応した溝のスクリューを製作する必要がある。また、同じ容器であっても配列のピッチが変わればその都度スクリューを製作する必要がある。このため、多品種の容器を扱う場合、スクリュー交換部品を多数制作、保管しなければならない問題があった。
【0004】
以上のように、容器種類変更の度にスクリューを交換する作業は調整工程もあり稼働率を下げる要因となっていた。さらに、下流側での工程を行う後続機の取入れヘッド数、処理能力が異なる場合、容器列の供給ピッチを変更する必要がある。その場合もその関係する部品の製作、型替作業が必要となっていた。
【0005】
この方式では、スクリューの回転につれて容器はコンベア上を水平移動するので、容器表面を摺ることとなり、傷付きが発生することがあった。
【0006】
また、従来、水平方向に回転する円盤の外周に沿って、掘り込み溝を設けた「コントロールホイール」をコンベア横に設置した構成の発明が開示されていた。
【0007】
しかしながら、前述の「スクリュー」構成の場合と同様に、容器或いは物品が変わる毎にそれに対応した「コントロールホイール」を製作する必要があった。
【0008】
兼用型のコントロールホイールとしたい場合は、角度の変更は困難なので、容器が大きくなったときは隣同士の間隔を広げる必要があるのでホイールの爪の長さを伸ばすこととなる。
【0009】
その場合、円盤中心から、爪先端までの距離が長くなるため、その分コントロールホイール全体をずらして軸中心を移動させる必要があり、そのための調整作業が必要となり且つ複雑な構成となっていた。このため、「スクリュー」あるいは「コントロールホイール」のいずれの場合も構成としては問題点が多くあった。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2005−212949号公報(第2、3頁、第1図)
【発明の概要】
【発明が解決しようとする課題】
【0011】
部品交換等の型替作業がなく容器の傷付きを最小限に抑え、しかも容器の形状の変化にソフトウエアにより対応できる自由度の高いピッチ調整装置を提供することを目的とする。
【0012】
このため、従来の「スクリュー」、「コントロールホイール」などの構成に替えて、「一対のプロペラ」をそれぞれ独立に駆動する2台の駆動部を制御して回転させて、上流側容器列を所定のピッチ間隔の容器配列に変えて下流側へ送り出す方式の装置を提供する。
【課題を解決するための手段】
【0013】
本発明の容器列ピッチ調整装置は、搬送用コンベアの上流側容器列を、所定ピッチ間隔配列の下流側容器列として搬送させるピッチ調整装置であって、前記コンベアの両側端に対向して設けられ、そのコンベア上を移動する各容器を所定位置で停止或いは解放させる水平方向に独立して間欠回転する1対のプロペラと、その一対のプロペラをそれぞれのシャフトを介して制御信号により独立駆動させる2台の駆動部と、前記搬送用コンベア周辺に設けられた複数の容器位置センサからの受信及び前記2台の駆動部へ制御信号を送信する制御部と、から少なくとも構成されることを特徴とする。
【0014】
また、前記一対のプロペラは、それぞれ等間隔の複数枚の羽根からなり、前記搬送用コンベア面上におけるそれらプロペラの羽根の回転方向は、そのコンベアの進行方向に合わせて、一対のプロペラは互いに反対方向へ前記駆動部により間欠回転されることを特徴とする。
また、前記等間隔の複数枚の羽根は軸対称の2枚の羽根であることを特徴とする。
【0015】
また、前記一対のプロペラシャフトの中心軸を通る垂直平面が前記ベルトコンベア上面と交わる直線を、前記上流側容器列の各容器を一時停止させる容器停止位置線とし、その停止位置線よりも上流側にあって、容器の通過を検出する容器位置センサーを備え、前記制御部は、その位置センサからの検出信号を受け、先行する容器の中心軸が停止位置線にあると判定したときは、前記2台の駆動部へそれぞれ駆動信号を送信する容器停止プログラム手段を備えることを特徴とする。
【0016】
また、前記制御部の容器停止プログラム手段は、前記一対のプロペラの一方のプロペラが容器停止位置線上にある前記容器の進行方向の側面部で進行を抑え、他方のプロペラがその容器と次の配列容器の間に入り次の配列容器の進行を抑えると共に停止位置線上にある容器を両プロペラで挟み、各プロペラ羽根の中心線と停止位置線となす角度は等しく且つ反対方向の角度(+θ、−θ)である状態とすることを特徴とする
【0017】
また、前記各プロペラ羽根の中心線と停止位置線とのなす角度(+θ、−θ)は、容器列の容器の形状と、コンベア両側端のプロペラ回転軸のシャフト間隔Dとにより定まり、使用する予定の容器の形状とそれに対応した角度(+θ、−θ)との関係データを前記制御部のメモリーに予め記録する記憶部を備え、制御部の前記容器停止プログラム手段は、更に一意的に容器形状に対応した制御信号を前記2台の駆動部へそれぞれ送る手段を備えることを特徴とする。
【0018】
また、前記制御部は、前記停止位置線上にある上流側容器列の容器と、進行方向に移動している先行容器とのピッチ間隔が所定ピッチ長Pに達した位置に設けた検出用の位置センサからの検出信号を受け、又は容器を搭載し移動しているコンベア駆動部の回転量(回転角度)を変換した電気信号値を受けて、前記先行容器とのピッチ間隔が所定ピッチ長Pであると判定したときは前記2台の駆動部のそれぞれに送信する容器解放プログラム手段を備えることを特徴とする。
【0019】
また、前記制御部の容器解放プログラム手段は、前記一対のプロペラにおいて、前記停止位置線上のその上流側容器列の容器の進行方向前部を抑えている一方のプロペラを回転させて、その容器を解放し、先行容器とのピッチ間隔Pを維持するように進行させると共に、他方のプロペラを回転させて、後続する容器を前記所定容器停止位置線上に移動させてその他方のプロペラによりその容器を停止させ、前記一方のプロペラとにより後続する容器を挟み、各プロペラ羽根の中心線と停止位置線とのなす角度は等しく且つ反対方向の角度(+θ、−θ)である状態とすることを特徴とする。
また、前記コンベアの両端部に前記一対のプロペラの各駆動部を固定する駆動部固定台を設け、前記各駆動部は、それぞれの固定台に取り付けるに際してコンベアに対し直交方向又は平行方向にずらして固定できる二次元方向シャフト位置調整可能であることを特徴とする。
【発明の効果】
【0020】
本発明の容器配列ピッチ調整装置は以下に示す効果を奏する。
【0021】
(1)上流側容器列の容器間隔がないか或いは押せ押せ状態になっている場合、一対のプロペラの回転を制御して独立に行わせることにより容易に所定ピッチ間隔で下流側へ送り出すことができる。
【0022】
(2)その一対のプロペラのそれぞれの回転方向は容器を搬送するコンベアの進行方向に合わせているため(回転方向は互いに逆向きである)、従来のように容器表面に傷をつける恐れがない。
【0023】
(3)容器列の形状(例えば径のサイズ、楕円などの形状)が変わっても、制御部からプロペラの駆動部へ送る制御データの設定変更のみで対応することができる。すなわち制御部のメモリーに容器を一対のプロペラで挟むときの各プロペラと容器停止位置線との角度θを予め記憶させておき、そのデータの設定変更のみでさまざまな容器にソフトウエアにより対応できる。機械的な型替作業は不要となり、稼働率の低下を抑えることができる。
【0024】
(4)ピッチ変更の場合も同様にソフトウエアにより対応できる。ピッチ長Pも予め制御部のメモリーに記憶させておき、その制御データの設定変更のみで下流側の容器配列のピッチ間隔Pを変えることができるので、機械的な型替作業は不要となる。
【0025】
(3)と(4)とを予めデータ設定しておけばボタン操作等のみで処理でき、物理的な交換作業が不要であり、稼働率を殆ど低下させない。
【図面の簡単な説明】
【0026】
【図1】一対のプロペラを用いた容器配列ピッチ調整装置を示す斜視図である。
【図2】各種容器サイズ・形状に対応する容器配列ピッチ調整装置の平面図である。
【図3】容器配列ピッチ調整装置の詳細を示し、(a)は平面図、(b)は前面図である。
【図4】容器配列ピッチ調整装置の詳細を示す側面図である。
【図5】容器配列ピッチ調整装置の詳細を示す図である。
【図6】複数の羽根の構造を示す平面図である。
【発明を実施するための形態】
【0027】
本発明の容器配列ピッチ調整装置の実施例について、以下、図に基いて説明する。
【0028】
図1は、ピッチ調整装置10の一対のプロペラ11の動作原理を示す。1a、1b、1c、1d、1e、・・・は容器列を示し、20は搬送用コンベア機構、21はそのコンベアの上面側ベルトを示す。その上面側21へは上流側から容器列1a〜1e・・・が搬送されている状態を示す。
【0029】
上流側の容器列は図に示すように容器間隔が無い状態で移動する。
【0030】
図1の一対のプロペラ11は、搬送用コンベア機構20の両側端に立設し、それぞれ独立に間欠的逆回転する11a、11bのプロペラからなる。それらプロペラ11a、11bはそれぞれの回転軸であるシャフト12a、12bを介して回転駆動させる2台の駆動部19a、19bに接続している。実施例ではプロペラ11は軸対象の二枚の羽根としたが図6に図示した3又は4枚羽根でもよい。
【0031】
搬送用コンベア機構20の下流側には前記一対のプロペラ11によって所定ピッチ間隔Pの容器配列を維持して移動搬送させるための下流側容器列搬送機構40がある。
【0032】
その下流側容器列搬送機構40は上面側21の上部にあり容器或いは物品を両側から挟むように両側にそれぞれ一対の回転ベルト40a、40bから少なくとも構成される。
【0033】
搬送用コンベアと同じ移動速度で回転ベルト40a、40bを回転させていると共に、その間に入る容器列を一対のプロペラ11で所定のピッチ間隔Pとした容器配列が維持されるようにその回転ベルト40a、40bの間に挟まれて移動する。
【0034】
尚、上流側には、図1では図示していないが、容器列がコンベア中心部を移動するように、その両側にガイドレール部30がある(図3、図5(a)参照)
【0035】
図5(a)に示すようにガイドレール部30は、両側に2対の丸棒30a、30b、30c、30dからなる。一対の30a、30bはプロペラ上側に、他の一対の30c、30dはプロペラの下側にあり、そのプロペラ11a、11bはガイドレール30の間を水平方向に回転して、容器の停止・解放を行う。
【0036】
尚、ガイドレール部30の各対の間の容器が通る間隔幅は、容器の外周の大きさ、形状によって定める。図5(a)の31、32は各ガイドレールの進行方向に垂直な方向のレール位置を調整するガイドレール位置調整部を示す。
尚、プロペラシャフト位置調整部については後述する。
【0037】
また、図3のガイドレール部30の場合は一対のプロペラ11の下側に1対のみ丸棒30a、30bがある場合を示す。
【0038】
次に、図1に戻りこの一対のプロペラ11の動作原理を説明する。
【0039】
図1は間隔無し或いは少ない間隔のランダムピッチに配列した容器列1a、1b、1c、1d、1e・・・・が搬送用コンベア機構20のコンベア上面側21に載って上流側から搬送されてくる場合を示す。
【0040】
図1(a)は、容器列の先頭容器1aが下流側所定ピッチ容器列搬送機構40の一対の回転ベルト40a、40bの間に挟まれ、その機構40の入り口から下流側に送り込まれる状態を示す。
【0041】
この状態で後続の容器列1b、1c、1d、1e・・・は、プロペラ11aによって移動を停止させられている。尚、プロペラ11bは容器列の1bと1cの間に入り、1c及びそれに続く容器を停止させている。
ここで詳しくは、プロペラ11a,11bの各軸中心を結ぶコンベア上面の容器停止線よりも上流側にあり、容器の通過を検出する容器位置センサー23を備える。制御部50はその検出信号を受け先行する容器が前記停止位置線にあると判定したときは容器1bを停止させる。(容器停止プログラム手段)
【0042】
以上の図1(a)の状態で容器1aは下流側に移動し、容器1aと1bとの中心軸間隔が所定の距離(ピッチP)となると、搬送用コンベア機構20上部或いは容器列搬送機構40側部に設けられた容器位置センサ24から制御部50の位置センサ入力端子50bへ信号が送られ、制御部50のCPUはこの信号を受けて駆動部19aに信号を送り、まず容器列の先端になる容器1bを抑えているプロペラ11aを回転させる(反時計方向)。(第1の容器解放プログラム手段)
又は、以下に示す第2の容器解放プログラム手段でもよい。即ち、容器がコンベア上に搭載され移動させるそのコンベア駆動部モータなどの回転角度を所定時間毎の変換器に入力し、制御部50は変換出力値を受けて容器1aが所定の距離(ピッチP)先行したか判定するようにしてもよい。回転角度の検出には市販されているロータリーエンコーダなどが利用できる。
【0043】
図1(b)にその状態を示す。図1(b)はプロペラ11aが回転し、よって容器1bが解放されて搬送機構40へ向かって移動する状態を示す。
【0044】
プロペラ11aが180度弱回転している間はプロペラ11bは容器1c、1d、1e・・・以後の容器列を停止させている。つまり、プロペラ11bは回転しない。
【0045】
ここで容器列の容器11bが停止していた搬送用コンベア機構20の上面側21上における位置が一対のプロペラ11a、11bのシャフト12a、12bの中心線を通る垂直面と交わる停止直線上にあるようにする。
【0046】
すなわち、制御部50は停止位置直線上の容器はプロペラ11a、11bの回転停止位相角度がそれぞれ+θ、−θとなるように調整しておく。
【0047】
その停止位相角度(+θ、−θ)は、シャフト12a、12bの間隔D、容器1の外周直径、プロペラ11a、11bの羽根の形状などで定まる値である。
【0048】
前述したプロペラ11aの180度弱の回転は、正確には(180−2θ)度である。
【0049】
一方、図1(b)のプロペラ11bは、プロペラ11aと反対方向(時計回り)に回転し、プロペラ11aと2θ度だけ位相角が遅れるようにして、容器列の先頭容器の前後が挟まれる形状となる。
【0050】
図1(b)の最終状態ではプロペラ11aが容器1cと1dの間に入ると同時にプロペラ11bが2θ度だけ回転し、容器1cは前記停止位置直線上に移動して停まる。
【0051】
上記の状態を図1(c)に示す。図1(a)と比較すると、プロペラ11a、11bが入れ替わった状態となっている。
【0052】
ここで、容器1bは容器1aに所定のピッチP長を保って上流側へ移動する。その容器1bが移動し、今停止している容器1cとの間隔が所定のピッチ間隔Pとなれば、容器1cは開放される。
【0053】
制御部50のCPUは容器位置センサ24からの信号を位置センサ入力端子50bからその信号を受け、又は変換器などの信号を受け、プロペラ11bの駆動部19bへ信号を送り、プロペラ11bを時計方向へ(180−2θ)度回転させると共に、プロペラ11aの駆動部19aへ信号を送り2θ度回転させる。
【0054】
図1(d)は上記途中の状態を示し、プロペラ11bは90度回転しその間にプロペラ11aは2θ度回転している状態を示す。
【0055】
図1(d)の動作の最終状態は図1(a)の状態に戻る。
【0056】
すなわち(a)−>(b)−>(c)−>(d)−>(a)−>(b)・・・を繰り返す。
【0057】
その一対のプロペラ11の駆動部19a、19bは例えばサーボモータ等を使用し、制御部50から駆動部19a、19bへの制御信号により容易に一対のプロペラ11を図1のように動作させることができる。
【0058】
図3には図1の詳細が示してある。
【0059】
前述したように、前記停止位相角(+θ、−θ)の角度は少なくとも容器の外周の大小により、その停止位相角(+θ、−θ)の角度を変えなければならない。
【0060】
シャフト間隔D及びプロペラ11a、11bの羽根の形状が一定であっても、容器の外周が変われば、それに対応した停止位相角(+θ、−θ)の角度を制御部50のメモリーに予め記憶させ、図2に示すように容器列1、2、3のそれぞれに対応した停止位相角(+θ、−θ)で容器を停止させる。
【0061】
図2(イ)は円筒状容器1、図2(ロ)は円筒状容器2(容器1に比較して直径が大きい場合)、図2(ハ)は楕円状容器3の場合を示す。その都度θの値が変わることが明らかである。
【0062】
図3は、停止位相角(+θ、−θ)と、シャフト12a、12b、間隔Dと、プロペラ11a、11bの羽根形状との関係を示す。(+θ、−θ)の角度は図3に示す作図によってその値は容易に求められる。
【0063】
尚、図3(a)は平面図、図3(b)は前面図を示す。さらに図3(a)のL−L断面を図4に示す。ここで、12a、12bはシャフト、13はベアリング軸受け、14はベアリングケース,19a、19bは駆動部、18a、18bは制御端子、15はその駆動部に一対のプロペラの各シャフト12a、12bに着脱自在に結合するカップリングである。
【0064】
16はブラケットであり、これらブラケット16の間に搬送用コンベア機構20があり、その上面側の上を容器列が移動している。
【0065】
図3(b)の前面図はその容器列の搬送状態を示したものである。
【0066】
図3(a)のL−L線は容器停止位置線であり、また、この図は容器1bが一対のプロペラで進行方向の前後を挟んだ状態を示す。図中の+θ、−θはプロペラの羽根の中心対象線M−Mと、容器停止位置線L−Lとのなす角度である。
【0067】
図4には容器を図示していない。また、図中のDの値はシャフト12a、12bの間隔長を示す。
図5(a)には、そのシャフト位置調整部について一実施例を図示してある。ここで、19m,19nはシャフト駆動部19a,19bを搭載して機械的に固定する固定台を示す。その固定台19m,19nに対して駆動部19a,19bをスライドして固定する。よって図5(b)に示すようにシャフト12a,12bの位置を容器進行に直交する方向にずらしてその間隔長Dを調整できる。さらに、図5(c)に示すように容器進行方向にいずれかのシャフト位置をずらして容器停止位置線の間隔を0からX長に調整できる。以上の二次元方向シャフト調整機構により容器物品の形状、大きさに容易に、短い作業時間で対応できる。
尚、固定台19m,19nと駆動部19a,19bの間に市販されている二次元方向に微調整できるマイクロメータを設けてもよい。
【0068】
尚、制御部50はCPU、メモリー部、前記センサ等のI/Fを含む入力端子部、前記2台の駆動部への出力端子部、表示部、それらを連結する内部バスから少なくとも構成され、そのCPUは少なくとも前記容器停止プログラム手段、容器解放プログラム手段を備えている。
【符号の説明】
【0069】
1、2、3 容器
1a、1b、1c・・・ 容器列(容器)
10 ピッチ調整装置
11 一対のプロペラ
11a、11b プロペラ
12a、12b シャフト
13 ベアリング軸受け
14 ベアリングケース
15 カップリング
16 ブラケット
18a、18b 制御端子
19a、19b 駆動部
19m、19n 駆動部固定台
20,21 搬送用コンベア機構、その上面側
22 コンベア側面側フレーム
23 停止線上流側容器位置センサ
24 停止線下流側容器位置センサ
30 ガイドレール部
30a、30b、30c、30d 丸棒
31,32 ガイドレール位置調整部
40 下流側容器列搬送機構
40a,40b 回転ベルト
50 制御部
50a 制御信号端子
50b、50c 位置センサ入力端子
100 基板
P ピッチ間隔
θ 停止位置角度
D 対シャフト位置間隔
X コンベア並行方向のシャフト位置のずれ
【特許請求の範囲】
【請求項1】
搬送用コンベアの上流側容器列を、所定ピッチ間隔配列の下流側容器列として搬送させるピッチ調整装置であって、
前記コンベアの両側端に対向して設けられ、そのコンベア上を移動する各容器を所定位置で停止或いは解放させる独立して水平方向に間欠回転する1対のプロペラと、
その一対のプロペラをそれぞれのシャフトを介して制御信号により独立駆動させる2台の駆動部と、
前記搬送用コンベア周辺に設けられた複数の容器位置センサからの受信及び前記2台の駆動部へ制御信号を送信する制御部と、から少なくとも構成されることを特徴とする容器配列ピッチ調整装置。
【請求項2】
前記一対のプロペラは、それぞれ等間隔の複数枚の羽根からなり、前記搬送用コンベア面上におけるそれらプロペラの羽根の回転方向は、そのコンベアの進行方向に合わせて、一対のプロペラは互いに反対方向へ前記駆動部により間欠回転されることを特徴とする請求項1記載の容器配列ピッチ調整装置。
【請求項3】
前記等間隔の複数枚の羽根は軸対称の2枚の羽根であることを特徴とする請求項2記載の容器配列ピッチ調整装置。
【請求項4】
前記一対のプロペラシャフトの中心軸を通る垂直平面が前記コンベア上面と交わる直線を、前記上流側容器列の各容器を一時停止させる容器停止位置線とし、その停止位置線よりも上流側にあって、容器の通過を検出する容器位置センサーを備え、
前記制御部は、その位置センサからの検出信号を受け、先行する容器の中心軸が停止位置線にあると判定したときは、前記2台の駆動部へそれぞれ駆動信号を送信する容器停止プログラム手段を備えることを特徴とする請求項1記載の容器配列ピッチ調整装置。
【請求項5】
前記制御部の容器停止プログラム手段は、前記一対のプロペラの一方のプロペラが容器停止位置線上にある前記容器の進行方向の側面部で進行を抑え、他方のプロペラがその容器と次の配列容器の間に入り次の配列容器の進行を抑えると共に停止位置線上にある容器を両プロペラで挟み、各プロペラ羽根の中心線と停止位置線となす角度は等しく且つ反対方向の角度(+θ、−θ)である状態とすることを特徴とする請求項4記載の容器配列ピッチ調整装置。
【請求項6】
前記各プロペラ羽根の中心線と停止位置線とのなす角度(+θ、−θ)は、容器列の容器の形状と、コンベア両側端のプロペラ回転軸のシャフト間隔Dとにより定まり、使用する予定の容器の形状とそれに対応した角度(+θ、−θ)との関係データを前記制御部のメモリーに予め記録した記憶部を備え、
制御部の前記容器停止プログラム手段は、更に一意的に容器形状に対応した制御信号を前記2台の駆動部へそれぞれ送る手段を備えることを特徴とする請求項5記載の容器配列ピッチ調整装置。
【請求項7】
前記制御部は、前記停止位置線上にある上流側容器列の容器と、進行方向に移動している先行容器とのピッチ間隔が所定ピッチ長Pに達した位置に設けた検出用の位置センサからの検出信号を受け、又は容器が搭載され移動しているコンベア駆動部の回転量(回転角度)を変換した電気信号値を受けて、
前記先行容器とのピッチ間隔が所定ピッチ長Pであると判定したときは前記2台の駆動部のそれぞれに送信する容器解放プログラム手段を備えることを特徴とする請求項1記載の容器配列ピッチ調整装置。
【請求項8】
前記制御部の容器解放プログラム手段は、前記一対のプロペラにおいて、前記停止位置線上のその上流側容器列の容器の進行方向前部を抑えている一方のプロペラを回転させて、その容器を解放し、先行容器とのピッチ間隔Pを維持するように進行させると共に、他方のプロペラを回転させて、後続する容器を前記所定容器停止位置線上に移動させて、その他方のプロペラによりその容器を停止させ、
前記一方のプロペラとにより後続する容器を挟み、各プロペラ羽根の中心線と停止位置線とのなす角度は等しく且つ反対方向の角度(+θ、−θn)である状態とすることを特徴とする請求項7記載の容器配列ピッチ調整装置。
【請求項9】
前記コンベアの両端部に前記一対のプロペラの各駆動部を固定する駆動部固定台を設け、前記各駆動部は、それぞれの固定台に取り付けるに際してコンベアに対し直交方向又は平行方向にずらして固定できる二次元方向シャフト位置調整可能であることを特徴とする請求項1記載の容器配列ピッチ調整装置。
【請求項1】
搬送用コンベアの上流側容器列を、所定ピッチ間隔配列の下流側容器列として搬送させるピッチ調整装置であって、
前記コンベアの両側端に対向して設けられ、そのコンベア上を移動する各容器を所定位置で停止或いは解放させる独立して水平方向に間欠回転する1対のプロペラと、
その一対のプロペラをそれぞれのシャフトを介して制御信号により独立駆動させる2台の駆動部と、
前記搬送用コンベア周辺に設けられた複数の容器位置センサからの受信及び前記2台の駆動部へ制御信号を送信する制御部と、から少なくとも構成されることを特徴とする容器配列ピッチ調整装置。
【請求項2】
前記一対のプロペラは、それぞれ等間隔の複数枚の羽根からなり、前記搬送用コンベア面上におけるそれらプロペラの羽根の回転方向は、そのコンベアの進行方向に合わせて、一対のプロペラは互いに反対方向へ前記駆動部により間欠回転されることを特徴とする請求項1記載の容器配列ピッチ調整装置。
【請求項3】
前記等間隔の複数枚の羽根は軸対称の2枚の羽根であることを特徴とする請求項2記載の容器配列ピッチ調整装置。
【請求項4】
前記一対のプロペラシャフトの中心軸を通る垂直平面が前記コンベア上面と交わる直線を、前記上流側容器列の各容器を一時停止させる容器停止位置線とし、その停止位置線よりも上流側にあって、容器の通過を検出する容器位置センサーを備え、
前記制御部は、その位置センサからの検出信号を受け、先行する容器の中心軸が停止位置線にあると判定したときは、前記2台の駆動部へそれぞれ駆動信号を送信する容器停止プログラム手段を備えることを特徴とする請求項1記載の容器配列ピッチ調整装置。
【請求項5】
前記制御部の容器停止プログラム手段は、前記一対のプロペラの一方のプロペラが容器停止位置線上にある前記容器の進行方向の側面部で進行を抑え、他方のプロペラがその容器と次の配列容器の間に入り次の配列容器の進行を抑えると共に停止位置線上にある容器を両プロペラで挟み、各プロペラ羽根の中心線と停止位置線となす角度は等しく且つ反対方向の角度(+θ、−θ)である状態とすることを特徴とする請求項4記載の容器配列ピッチ調整装置。
【請求項6】
前記各プロペラ羽根の中心線と停止位置線とのなす角度(+θ、−θ)は、容器列の容器の形状と、コンベア両側端のプロペラ回転軸のシャフト間隔Dとにより定まり、使用する予定の容器の形状とそれに対応した角度(+θ、−θ)との関係データを前記制御部のメモリーに予め記録した記憶部を備え、
制御部の前記容器停止プログラム手段は、更に一意的に容器形状に対応した制御信号を前記2台の駆動部へそれぞれ送る手段を備えることを特徴とする請求項5記載の容器配列ピッチ調整装置。
【請求項7】
前記制御部は、前記停止位置線上にある上流側容器列の容器と、進行方向に移動している先行容器とのピッチ間隔が所定ピッチ長Pに達した位置に設けた検出用の位置センサからの検出信号を受け、又は容器が搭載され移動しているコンベア駆動部の回転量(回転角度)を変換した電気信号値を受けて、
前記先行容器とのピッチ間隔が所定ピッチ長Pであると判定したときは前記2台の駆動部のそれぞれに送信する容器解放プログラム手段を備えることを特徴とする請求項1記載の容器配列ピッチ調整装置。
【請求項8】
前記制御部の容器解放プログラム手段は、前記一対のプロペラにおいて、前記停止位置線上のその上流側容器列の容器の進行方向前部を抑えている一方のプロペラを回転させて、その容器を解放し、先行容器とのピッチ間隔Pを維持するように進行させると共に、他方のプロペラを回転させて、後続する容器を前記所定容器停止位置線上に移動させて、その他方のプロペラによりその容器を停止させ、
前記一方のプロペラとにより後続する容器を挟み、各プロペラ羽根の中心線と停止位置線とのなす角度は等しく且つ反対方向の角度(+θ、−θn)である状態とすることを特徴とする請求項7記載の容器配列ピッチ調整装置。
【請求項9】
前記コンベアの両端部に前記一対のプロペラの各駆動部を固定する駆動部固定台を設け、前記各駆動部は、それぞれの固定台に取り付けるに際してコンベアに対し直交方向又は平行方向にずらして固定できる二次元方向シャフト位置調整可能であることを特徴とする請求項1記載の容器配列ピッチ調整装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−20770(P2011−20770A)
【公開日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願番号】特願2009−165702(P2009−165702)
【出願日】平成21年7月14日(2009.7.14)
【出願人】(390029090)靜甲株式会社 (30)
【Fターム(参考)】
【公開日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願日】平成21年7月14日(2009.7.14)
【出願人】(390029090)靜甲株式会社 (30)
【Fターム(参考)】
[ Back to top ]