
容量性タイプの近接センサ
検知電極を有する容量タイプの近接センサが提供される。検知電極は、導電領域113及び非導電領域117をもつ表面を有し、センサは、検知電極と対象109、111との間の電界110、112を測定するように適応される。更に、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のためのシステム、医用X線診断及び/又はX線治療及び/又は核診断/治療のための装置(例えばSPECT)と対象との間の衝突を回避する方法、プログラム要素及びコンピュータ可読媒体が記述される。接近する対象の感度がセンサ自体の特別なジオメトリからの改善された独立性を有する容量タイプの近接センサが開示される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、容量タイプの近接センサ、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のためのシステム、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置と対象との間の衝突を回避する方法、に関する。
【背景技術】
【0002】
容量タイプの近接センサは、距離検出の目的で集中的に使用され、平坦で、ほぼ円形又は四角形である検知電極を特徴とする。ガード電極が、通常はセンサのサイズの3分の1のオーダである直線の測定レンジを得るために使用される。同じ検知技術が、フィリップス医療機器において衝突防止の目的で使用されており、センサのサイズより大きい測定レンジを特徴とする。
【0003】
技法は、対象への接近を検出するために、移動する(医療)機器のケーシングの外側境界に沿って容量タイプの近接センサ電極を使用する。近接センサ電極は、第1の場所における検査テーブル上の患者との衝突、及び第2の場所における直接的な環境における他の機器との衝突、に対する予防的方策として意図される。
【発明の概要】
【発明が解決しようとする課題】
【0004】
容量タイプの近接センサの電極のサイズ及び形状は、機器のケーシングのサイズ及び形状によって影響される。検出器の検知レンジは、容量タイプの近接センサ構造自体よりさらに大きい距離まで延在する。このような場合、センサ特性は、もはや距離に関して確実に線形ではなくなる。
【0005】
非線形特性は、それがうまく再現する限り、基本的に実際の問題ではない。非線形挙動を再現することは、センサジオメトリが固定されたままである場合にのみ期待されることができる。センサジオメトリは、基本的に、2つの容量電極の形状、それらの相互の距離及び相対的な向きによって構成される。センサの一方の電極は、検出されるべき対象/ターゲットの表面であり、従って、全く規定されていない。センサ電極の形状及びサイズは、当該機器の形状及びサイズによって影響される。そのようにして、センサ電極形状及びサイズの選択の制限された自由がある。センサ特性が、対象のサイズ及びセンサ電極の形状に対する対象の相対位置に依存して、大きなバリエーションを示すことは、疑いが無い。結果は、衝突防止システムが、対象のサイズ/形状及びセンサ電極領域上の相対的な接近位置に依存して、同様に大きく変化する停止距離をもたらすことである。
【0006】
本システムにおいて、較正ステップが行われる場合、停止距離の有効レンジが許容できる。小さい(機械的な)変更又はアドオン(拡張)が、センサのセンシティブな領域において行われることにより、追加のバリエーションをもたらすことがある。このステップは、追加の停止距離変更を生じさせ、ゆえに追加の較正ステップを必要とする。
【0007】
従って、センサの非線形の、再現する特性は、良好に受け入れられる。しかしながら、センサ特性は、センサジオメトリが同じままである場合にのみ再現する。センサジオメトリは、一方では、センサ電極形状を含み、他方では、検出されるべき(接地された)対象/ターゲットの位置、形状及びサイズを含む。対象のサイズ及び形状は、影響を与えられることができず、検知電極の形状は、機器のケーシングの形状によって、ほぼ決定される。
【課題を解決するための手段】
【0008】
本発明は、ケーシング表面に沿った検知電極の構造を採り入れ、かかる検知電極は、センシティブな領域の全体の領域上のさまざまな検知位置に関するセンサ特性の最小バリエーションのために、形づくられる。このフィーチャは、状況(機器上の特定の位置及び対象サイズ)に依存して、衝突防止システムの停止距離のバリエーションを制限する。同時に、これは、制限されたやり方でセンサ挙動に影響を及ぼす小さい変更が機器において行われることを可能にし、これは、なお衝突防止システムの許容できる停止挙動を与える。
【0009】
本発明は、検知電極を有する容量タイプの近接センサであって、検知電極は、導電領域及び非導電領域を有する表面を有し、センサが、検知電極と対象との間の電界を測定するように適応される、センサを提供する。
【0010】
本発明は、請求項1乃至9のいずれか1項に記載のセンサを有する医用X線診断及び/又はX線治療及び/又は核診断/治療のための装置(例えばSPECT)を提供する。SPECTは、ガンマ光線が使用される核医学トモグラフィックイメージング技法である。SPECTは、シングルフォトンエミッションコンピュータトモグラフィを表す。
【0011】
本発明は、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置と、請求項1乃至9のいずれか1項に記載のセンサを有する対象と、を有する、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のためのシステムを提供する。
【0012】
本発明は、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置と対象との間の衝突を回避する方法であって、請求項1乃至9に記載のセンサと対象との間の距離を測定するステップと、距離が小さい場合、装置とセンサとの間の接近を止めるステップと、を含み、前記装置が前記センサを有する、方法を提供する。
【0013】
本発明は、プロセッサによって実行されるとき、請求項12に記載の方法を実施するように適応されるプログラム要素を提供する。
【0014】
本発明は、請求項13に記載のプログラム要素を記憶したコンピュータ可読媒体を提供する。
【0015】
他の実施形態は、従属請求項に組み込まれている。
【0016】
例示の実施形態によれば、対象が接地される、センサが提供される。
【0017】
本発明の他の見地によれば、導電領域が電気的に接続される、センサが提供される。
【0018】
本発明の他の見地によれば、導電領域が、処理エレクトロニクスに電気的に接続される、センサが提供される。
【0019】
本発明の他の実施形態によれば、表面が、実質的に平坦な領域を有し、これらの実質的に平坦な領域が、非導電領域を有する、センサが提供される。
【0020】
例示の実施形態によれば、表面が実質的に非平坦な領域を有し、これらの実質的に非平坦な領域が導電領域を有する、センサが提供される。
【0021】
本発明の例示の実施形態の例示の見地は、導電領域が検知電極の寸法全体のサイズにあわせて最適化される寸法を有する、センサが提供され、それにより構造全体の領域上のセンサ感度の均一性を最適化する点に、見られることができる。
【0022】
本発明の他の見地によれば、センサの感度がセンサの形状から実質的に独立している、センサが提供される。
【0023】
本発明の他の実施形態によれば、対象が動物又は人間である、センサが提供される。
【0024】
キャパシタンスタイプの近接センサであって、対象に接近するその感度が、センサ自体の特別なジオメトリから独立していることに関して最適化される、近接センサを提供することが、本発明の要旨とみなされることができる。
【0025】
本発明の以下に記述される例示の実施形態は、方法、装置、プログラム要素及びコンピュータ可読媒体にも当てはまることに注意すべきである。
【0026】
上述のフィーチャは、組み合わせられてもよいことに注意すべきである。上述のフィーチャの組み合わせは更に、明示的に詳しく記述されない場合でも、相乗効果をもたらすことができる。
【0027】
本発明のこれら及び他の見地は、以下に記述される実施形態から明らかになり、それらを参照して説明される。
【図面の簡単な説明】
【0028】
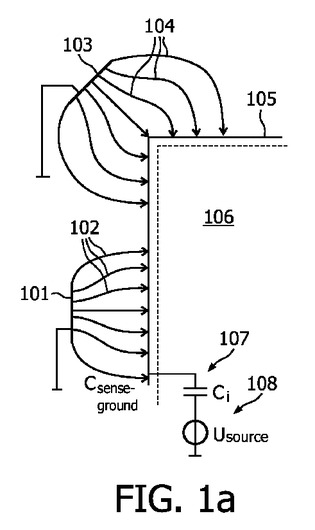
【図1a】検知電極の閉じた表面検知領域を示す図。
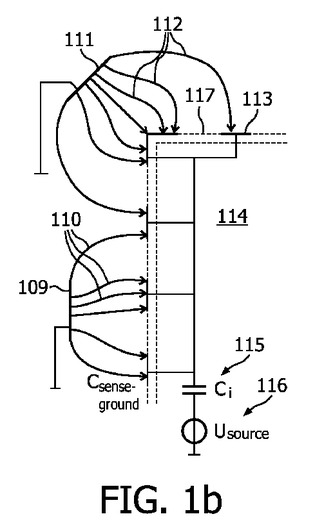
【図1b】検知電極のオープン構造の検知領域を示す図。
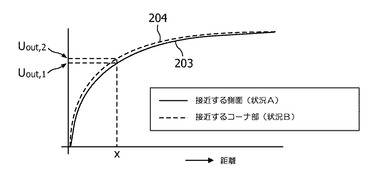
【図2a】図1aによる検知電極との距離に依存するUoutの図。
【図2b】図1bによる検知電極との距離に依存するUoutの他の図。
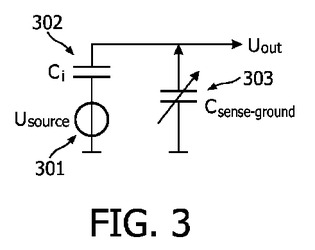
【図3】図1a又は図1bによる基本的なセンサ読み取り回路を示す図。
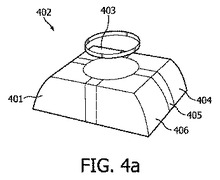
【図4a】閉じた表面を有する通常の検知電極を有する4つのセンサを示す図。
【図4b】全体のセンサ領域上の改良された感度均一性のために、オープンな「スケルトン」形状の構造を有する新しい電極を有する4つの新しいセンサを示す図。
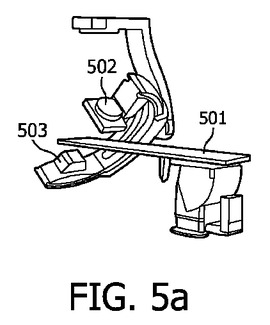
【図5a】心臓血管用医療製品を示す図。
【図5b】異なる位置における同じ心臓血管用医療製品を示す図。
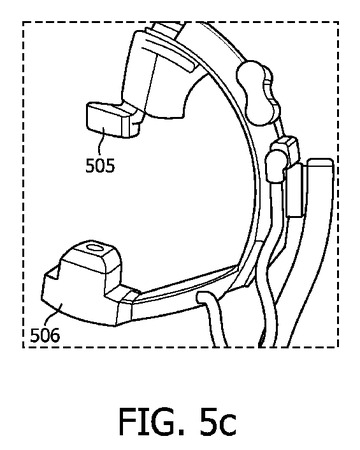
【図5c】他の心臓血管用医療製品をより詳しく示す図。
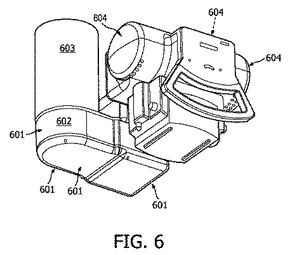
【図6】天井懸架構造を有するX線源を示す図。
【発明を実施するための形態】
【0029】
本発明の例示の実施形態が、添付の図面を参照して以下に記述される。
【0030】
本発明は、特性レンジが低下するようなやり方で、センサ特性に影響を与える検知電極の他の構造を採り入れる。センサ特性のレンジは、より狭い帯域内にあるままであり、それゆえ停止距離のより少ないバリエーションをもたらす。
【0031】
衝突防止センサのセンサ電極は、3次元構造を有する。センサ感度は、構造のより大きい平坦な領域における感度と比較して、電極のエッジ部及びコーナ部において全く異なる。本発明は、センサ電極の特に相対的に大きい平坦な領域における電極構造を変更することによって、この挙動に対する変更を採り入れる。既存の技法に関する主な問題は、平坦な領域においてセンサ構造に接近する対象に関する感度が、コーナ部又はエッジ部においてセンサに接近する対象に関する感度よりも著しく大きいことである。本発明は、エッジ部及びコーナ部の近傍では保持される電極を有するが、平坦な領域ではオープン構造を有するセンサ電極構造を使用する。このようにして、エッジ部及びコーナ部における感度はほとんど影響を受けないが、平坦な領域の感度は低下される。こうして、センサ電極の構造は、センサ表面全体においてよりバランスのとれた感度を生じさせ、それにより、停止後のクリアランス距離に関してより均一な停止挙動をもたらす。
【0032】
停止距離の特定のレンジを受け入れる場合、このアプローチは、機器上への適応のため、センサ挙動のより多くのバリエーションを可能にする。このフィーチャは、付加の機械的スペーサをX線源のカバーに取り付けるために最も重要であり、それにより、X線源と人間組織との間に最小距離を強いる。この付加のユニットは、同様にセンサ電極を備えるが、スペーサの曲がった形状のため、かなり低い感度図を有する。本発明の技法は、スペーサ変更の後に較正ステップを行わなくても、スペーサの有無に関係なく許容できる停止挙動を提供する。
【0033】
図1a及び図2aは、センサ電極構造が複雑な三次元形状を有する距離検知のための容量測定技法に関連する基本的な問題を簡単な機構で示している。図1aは、例えばX線源のケーシングでありえる対象106を示す。このケーシング上に、導電性の表面105がある。この表面105は、検知電極であり、検知電極は、内部キャパシタCiを介して電圧源Usourceと接続される。ケーシング106及び検知電極105に対向して、素子101及び103がある。これらの素子101及び103は、グラウンドと接続される。これらの素子101及び103と検知電極105との間には、キャパシタンスCsense−groundがある。添え字sense−groundは、キャパシタンスが検知電極105と接地された素子101及び103との間にあることを表わす。更に、素子101及び103と検知電極105との間には、電界102及び104がある。
【0034】
電極を構造化することは、さまざまな接近方向に関してよりバランスのとれた挙動を達成することを助ける。図1bは、検知電極がオープン構造の検知領域を有することを除いて、同じ状況(例えばケーシング114を有する)を示している。全体のセンサは、いくつかの導電領域113及びいくつかの非導電領域117を有する。検知電極のこれらの部分は、キャパシタCi115を介して、電圧源Usource116と一緒に接続される。検知電極と対向して、素子109又は111がある。これらの素子と検知電極の導電領域113との間には、電界110又は112の流線がある。
【0035】
容量3次元センサ電極を平坦な側面において相対的に大きい対象に接近させること(状況A)は、コーナ部においてセンサ電極を接近させること(状況B)と比較して、より大きいレンジにわたって非常により高い感度を示す。特に、対象のジオメトリサイズのオーダの距離だけ離れたところで、この現象は最も効果的である。衝突防止のための距離検知の応用分野の場合、停止距離の最小の開きを与えるので、これらの効果によるセンサ特性の最小の開きを有することが望ましい。特定の効果が常に存在するので、特定の効果が、受け入れられなければならないことが明らかである。しかしながら、効果は、閉じた表面を有する代わりに、機械部分の3次元表面において検知電極を構造化することによって、低下されうる。
【0036】
図2aは、素子101又は103と検知電極105との間の距離に依存する出力電圧Uoutを表す。この図は、図1の状況による、接近する素子102又は103の感度を示している。グラフ201は、接近する素子101の特性を示す。グラフ202は、接近する素子103の特性を表す。はっきりした違いが、グラフ201と202との間にある。従って、同じ距離xにおいて、異なる電圧Uout,1及びUout,2がある。素子101は、素子103より低い電圧Uout,1を生成し、素子103は、より高い電圧Uout,2を生成する。両方の電圧Uout,1及びUout,2の間の違いは、測定誤差に対応する。
【0037】
図2bは、接近する素子109又は111に関する同じ特性をそれぞれ示している。 図2bによる測定の誤差(Uout,1及びUout,2の間の違い)が、ここで大幅に低減されることが見られる。
【0038】
図3は、図1a及び図1bの状況による回路を概略的に示す。検知電極は、内部キャパシタCi302を介して、電圧源Usource301に接続される。素子101、103、109又は111と検知電極との間の電界は、それぞれキャパシタンスCsense−ground303をもたらす。このキャパシタンスCsense−ground303は、素子101、103、109又は111と検知電極との間の距離に依存する。
【0039】
改良された感度均一性のために検知電極を構造化する記述された技法は、Bestの医用システムの心臓血管イメージングシステムのX線管上の衝突防止センサに適用されている。技法は、カバーのセンシティブな全領域において「Bodyguardシステム」のより良好な停止挙動を達成する際に重要である。特定のシステムに関して、4つのセンサ401、403、404及び406の組402が、X線管上のカバー内に四象限に配置され、図4aに示されるように4つの完全に閉じた領域のセンサ構造を有する。4つのセンサ401、403、404及び406は、非導電障壁405によって隔てられている。本発明による構造化された電極を実現することは、停止距離のかなりより小さいバリエーションをもたらすと同時に、管カバーの前の任意のスペーサユニットのセンサ電極においてより良好な感度を提供する。
【0040】
図4bは、本発明によるセンサを有する以外は同じである機構410を示している。センサ407、408、409及び413は、導電領域411及び412及び非導電領域414、415及び416を有する。以前の段落で述べたように、(大きい)平坦な領域のセンサ感度は、これらの平坦な領域におけるセンサ構造に開口を採り入れることによって、コーナ部及びエッジ部におけるより低いセンサ感度を支持して、低下される。図4a及び図4bは、Poly−G2システムのX線管のカバー内部のセンサ電極構造の例を示している。基本的な電極構造は、各コーナ部及びエッジ部411において導電パターンを幅10mmのストライプに制限することによって、全領域の導電パターン(図4a)から、スケルトン形状のパターンに変えられている。それに加えて、5mm幅の斜めのストライプ412が、大きな開口に加えられることにより、これらの領域があまりに低い局所的な感度をもたらすことを防ぐ。
【0041】
特定の設計ツールが、検知機能が設計されなければならないケーシングのその特定のサイズ及び形状を有する所与のアプリケーションについて、成功する電極構造の設計を容易にするために開発されるであろう。
【0042】
フィリップスメディカルシステムズ事業部内で、本発明がその性能をアップグレードすることができるとともに、それが近い将来実現されるいくつかのアプリケーションが存在する。これらのアプリケーションは、PolyG2管カバー、クレアシステム及びFD10及びFD20X線検出器ユニットの管カバーのような、X線イメージングシステムの心臓血管グループからのシステムを含む。図5a、図5b及び図5cは、衝突防止のための容量タイプの近接センサが実現される位置の標示に関して、これらのシステムのピクチャを示す。
【0043】
図5a、図5b及び図5cは、心臓血管医療製品を示し、患者テーブル501、504、検出器ケーシング502、505上の衝突防止センサ及びX線管ケーシング503、506上の衝突防止センサが示されている。
【0044】
アプリケーションの医用システム分野から離れて、技法は更に、一般に、衝突が所望されない状況である機器のロボット操作を含むアプリケーションにとって興味がある。
【0045】
フィリップスメディカルシステムズ、ハンブルグによる汎用心臓血管X線Bodyguardのアプリケーション:PMSハンブルグは、医療産業に対する汎用X線システムのサブライヤである。X線システムに関するそれらの新しい開発の1つは、Tangoシステムである。Tango X線システム内において、非接触の対象検出装置が、セキュリティ概念の一部である。この装置は、可動X線システムの、X線検査室内の人又は機器との衝突を防ぐ。Tangoシステムは、患者テーブル及び検出器天井懸架構造を有する。対象検出システムは、システムの一部又はシステム全体の特に人との衝突、及び指摘としてX線検査室内部の家具又は他の対象との衝突を回避するために、Tangoシステムの動き制御によって解釈されることができる適切な(衝突)データを提供するべきである。インタフェースによって、装置は、距離及び方向に関して、天井懸架構造又はその一部との関連において検出される対象の位置のデータを提供する。
【0046】
図6は、PMSハンブルグGXR Tangoシステムの検出器天井懸架構造を示している。「容量衝突防止センサ」が実現されるさまざまな異なる位置が図示されている。図6は、テレスコープ603、スウィングアーム602、センサ管アセンブリ604及びセンサスイングアーム601を示している。
【0047】
図7は、コンピュータ可読媒体が格納されうるコンピュータ701を示している。コンピュータは、キーボード703、ディスプレイ704及びCPU702を有する。
【0048】
検知電極を有する容量タイプの近接センサであって、検知電極が、導電領域113及び非導電領域117を有する表面を有し、センサが、検知電極と対象109、111との間の電界110、112を測定するように適応される、近接センサが提供される。更に、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のためのシステム、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置と対象との間の衝突を回避する方法、プログラム要素及びコンピュータ可読媒体、が記述される。接近する対象の感度がセンサ自体の特別なジオメトリからの改善された独立性を示す容量タイプの近接センサが開示される。
【0049】
本発明は、図面及び前述の記述に詳しく図示され記述されているが、このような図面及び記述は、説明的又は例示的なものと考えられるべきであり、制限的なものとして考えられるべきではない。本発明は、開示された実施形態に制限されない。開示された実施形態の他のバリエーションは、図面、開示及び添付の請求項の検討に基づいて、請求項に記載の本発明を実施する際に当業者によって理解され、達成されることができる。請求項において、「含む、有する」なる語は、他の構成要素又はステップを除外せず、不定冠詞は、複数性を除外しない。単一のプロセッサ又は他のユニットは、請求項に列挙されるいくつかのアイテムの機能を果たすことができる。特定の手段が相互に異なる従属請求項に列挙されているという単なる事実は、これらの手段の組み合わせが有利に使用されることができないことを示さない。コンピュータプログラムは、例えば他のハードウェアと共に又はその一部として供給される光学記憶媒体又はソリッドステート媒体のような適切な媒体上に記憶され/配布されることができるが、インターネット又は他のワイヤード又はワイヤレス通信システムを介するように、他の形式でも配布されることができる。請求項における任意の参照符号は、請求項の範囲を制限するものとして解釈されるべきでない。
【符号の説明】
【0050】
101 (接地された)対象、102 電界の流線、103 (接地された)対象、104 電界の流線、105 検知電極、106 カバー、107 内部キャパシタンスCi、108 電圧源Usource、109 (接地された)対象、110 電界の流線、111 (接地された)対象、112 電界の流線、113 検知電極の導電領域、114 カバー、115 内部キャパシタンスCi、116 電圧源Usource、117 検知電極の非導電領域、201 検知電極の側面に接近する対象のグラフ、202 検知電極のコーナ部に接近する対象のグラフ、203 検知電極の側面に接近する対象のグラフ、204 検知電極のコーナ部に接近する対象のグラフ、301 電圧源Usource、302 内部キャパシタンスCi、303 可変Csense−ground(対象と検知電極との間の距離に依存する)、401 検知電極、402 X線管のカバー、403 検知電極、404 検知電極、405 非導電障壁、406 検知電極、407 検知電極、408 検知電極、409 検知電極、410 X線管のカバー、411 検知電極の導電領域、412 検知電極の導電領域、413 検知電極、414 検知電極の非導電領域、415 検知電極の非導電領域、416 検知電極の非導電領域、501 患者テーブル、502 検出器ケーシング上の衝突防止センサ、503 X線管ケーシング上の衝突防止センサ、504 患者テーブル、505 検出器ケーシング上の衝突防止センサ、506 X線管ケーシング上の衝突防止センサ、601 センサスイングアーム、602 スイングアーム、603 テレスコープ、604 センサ管アセンブリ。
【技術分野】
【0001】
本発明は、容量タイプの近接センサ、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のためのシステム、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置と対象との間の衝突を回避する方法、に関する。
【背景技術】
【0002】
容量タイプの近接センサは、距離検出の目的で集中的に使用され、平坦で、ほぼ円形又は四角形である検知電極を特徴とする。ガード電極が、通常はセンサのサイズの3分の1のオーダである直線の測定レンジを得るために使用される。同じ検知技術が、フィリップス医療機器において衝突防止の目的で使用されており、センサのサイズより大きい測定レンジを特徴とする。
【0003】
技法は、対象への接近を検出するために、移動する(医療)機器のケーシングの外側境界に沿って容量タイプの近接センサ電極を使用する。近接センサ電極は、第1の場所における検査テーブル上の患者との衝突、及び第2の場所における直接的な環境における他の機器との衝突、に対する予防的方策として意図される。
【発明の概要】
【発明が解決しようとする課題】
【0004】
容量タイプの近接センサの電極のサイズ及び形状は、機器のケーシングのサイズ及び形状によって影響される。検出器の検知レンジは、容量タイプの近接センサ構造自体よりさらに大きい距離まで延在する。このような場合、センサ特性は、もはや距離に関して確実に線形ではなくなる。
【0005】
非線形特性は、それがうまく再現する限り、基本的に実際の問題ではない。非線形挙動を再現することは、センサジオメトリが固定されたままである場合にのみ期待されることができる。センサジオメトリは、基本的に、2つの容量電極の形状、それらの相互の距離及び相対的な向きによって構成される。センサの一方の電極は、検出されるべき対象/ターゲットの表面であり、従って、全く規定されていない。センサ電極の形状及びサイズは、当該機器の形状及びサイズによって影響される。そのようにして、センサ電極形状及びサイズの選択の制限された自由がある。センサ特性が、対象のサイズ及びセンサ電極の形状に対する対象の相対位置に依存して、大きなバリエーションを示すことは、疑いが無い。結果は、衝突防止システムが、対象のサイズ/形状及びセンサ電極領域上の相対的な接近位置に依存して、同様に大きく変化する停止距離をもたらすことである。
【0006】
本システムにおいて、較正ステップが行われる場合、停止距離の有効レンジが許容できる。小さい(機械的な)変更又はアドオン(拡張)が、センサのセンシティブな領域において行われることにより、追加のバリエーションをもたらすことがある。このステップは、追加の停止距離変更を生じさせ、ゆえに追加の較正ステップを必要とする。
【0007】
従って、センサの非線形の、再現する特性は、良好に受け入れられる。しかしながら、センサ特性は、センサジオメトリが同じままである場合にのみ再現する。センサジオメトリは、一方では、センサ電極形状を含み、他方では、検出されるべき(接地された)対象/ターゲットの位置、形状及びサイズを含む。対象のサイズ及び形状は、影響を与えられることができず、検知電極の形状は、機器のケーシングの形状によって、ほぼ決定される。
【課題を解決するための手段】
【0008】
本発明は、ケーシング表面に沿った検知電極の構造を採り入れ、かかる検知電極は、センシティブな領域の全体の領域上のさまざまな検知位置に関するセンサ特性の最小バリエーションのために、形づくられる。このフィーチャは、状況(機器上の特定の位置及び対象サイズ)に依存して、衝突防止システムの停止距離のバリエーションを制限する。同時に、これは、制限されたやり方でセンサ挙動に影響を及ぼす小さい変更が機器において行われることを可能にし、これは、なお衝突防止システムの許容できる停止挙動を与える。
【0009】
本発明は、検知電極を有する容量タイプの近接センサであって、検知電極は、導電領域及び非導電領域を有する表面を有し、センサが、検知電極と対象との間の電界を測定するように適応される、センサを提供する。
【0010】
本発明は、請求項1乃至9のいずれか1項に記載のセンサを有する医用X線診断及び/又はX線治療及び/又は核診断/治療のための装置(例えばSPECT)を提供する。SPECTは、ガンマ光線が使用される核医学トモグラフィックイメージング技法である。SPECTは、シングルフォトンエミッションコンピュータトモグラフィを表す。
【0011】
本発明は、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置と、請求項1乃至9のいずれか1項に記載のセンサを有する対象と、を有する、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のためのシステムを提供する。
【0012】
本発明は、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置と対象との間の衝突を回避する方法であって、請求項1乃至9に記載のセンサと対象との間の距離を測定するステップと、距離が小さい場合、装置とセンサとの間の接近を止めるステップと、を含み、前記装置が前記センサを有する、方法を提供する。
【0013】
本発明は、プロセッサによって実行されるとき、請求項12に記載の方法を実施するように適応されるプログラム要素を提供する。
【0014】
本発明は、請求項13に記載のプログラム要素を記憶したコンピュータ可読媒体を提供する。
【0015】
他の実施形態は、従属請求項に組み込まれている。
【0016】
例示の実施形態によれば、対象が接地される、センサが提供される。
【0017】
本発明の他の見地によれば、導電領域が電気的に接続される、センサが提供される。
【0018】
本発明の他の見地によれば、導電領域が、処理エレクトロニクスに電気的に接続される、センサが提供される。
【0019】
本発明の他の実施形態によれば、表面が、実質的に平坦な領域を有し、これらの実質的に平坦な領域が、非導電領域を有する、センサが提供される。
【0020】
例示の実施形態によれば、表面が実質的に非平坦な領域を有し、これらの実質的に非平坦な領域が導電領域を有する、センサが提供される。
【0021】
本発明の例示の実施形態の例示の見地は、導電領域が検知電極の寸法全体のサイズにあわせて最適化される寸法を有する、センサが提供され、それにより構造全体の領域上のセンサ感度の均一性を最適化する点に、見られることができる。
【0022】
本発明の他の見地によれば、センサの感度がセンサの形状から実質的に独立している、センサが提供される。
【0023】
本発明の他の実施形態によれば、対象が動物又は人間である、センサが提供される。
【0024】
キャパシタンスタイプの近接センサであって、対象に接近するその感度が、センサ自体の特別なジオメトリから独立していることに関して最適化される、近接センサを提供することが、本発明の要旨とみなされることができる。
【0025】
本発明の以下に記述される例示の実施形態は、方法、装置、プログラム要素及びコンピュータ可読媒体にも当てはまることに注意すべきである。
【0026】
上述のフィーチャは、組み合わせられてもよいことに注意すべきである。上述のフィーチャの組み合わせは更に、明示的に詳しく記述されない場合でも、相乗効果をもたらすことができる。
【0027】
本発明のこれら及び他の見地は、以下に記述される実施形態から明らかになり、それらを参照して説明される。
【図面の簡単な説明】
【0028】
【図1a】検知電極の閉じた表面検知領域を示す図。
【図1b】検知電極のオープン構造の検知領域を示す図。
【図2a】図1aによる検知電極との距離に依存するUoutの図。
【図2b】図1bによる検知電極との距離に依存するUoutの他の図。
【図3】図1a又は図1bによる基本的なセンサ読み取り回路を示す図。
【図4a】閉じた表面を有する通常の検知電極を有する4つのセンサを示す図。
【図4b】全体のセンサ領域上の改良された感度均一性のために、オープンな「スケルトン」形状の構造を有する新しい電極を有する4つの新しいセンサを示す図。
【図5a】心臓血管用医療製品を示す図。
【図5b】異なる位置における同じ心臓血管用医療製品を示す図。
【図5c】他の心臓血管用医療製品をより詳しく示す図。
【図6】天井懸架構造を有するX線源を示す図。
【発明を実施するための形態】
【0029】
本発明の例示の実施形態が、添付の図面を参照して以下に記述される。
【0030】
本発明は、特性レンジが低下するようなやり方で、センサ特性に影響を与える検知電極の他の構造を採り入れる。センサ特性のレンジは、より狭い帯域内にあるままであり、それゆえ停止距離のより少ないバリエーションをもたらす。
【0031】
衝突防止センサのセンサ電極は、3次元構造を有する。センサ感度は、構造のより大きい平坦な領域における感度と比較して、電極のエッジ部及びコーナ部において全く異なる。本発明は、センサ電極の特に相対的に大きい平坦な領域における電極構造を変更することによって、この挙動に対する変更を採り入れる。既存の技法に関する主な問題は、平坦な領域においてセンサ構造に接近する対象に関する感度が、コーナ部又はエッジ部においてセンサに接近する対象に関する感度よりも著しく大きいことである。本発明は、エッジ部及びコーナ部の近傍では保持される電極を有するが、平坦な領域ではオープン構造を有するセンサ電極構造を使用する。このようにして、エッジ部及びコーナ部における感度はほとんど影響を受けないが、平坦な領域の感度は低下される。こうして、センサ電極の構造は、センサ表面全体においてよりバランスのとれた感度を生じさせ、それにより、停止後のクリアランス距離に関してより均一な停止挙動をもたらす。
【0032】
停止距離の特定のレンジを受け入れる場合、このアプローチは、機器上への適応のため、センサ挙動のより多くのバリエーションを可能にする。このフィーチャは、付加の機械的スペーサをX線源のカバーに取り付けるために最も重要であり、それにより、X線源と人間組織との間に最小距離を強いる。この付加のユニットは、同様にセンサ電極を備えるが、スペーサの曲がった形状のため、かなり低い感度図を有する。本発明の技法は、スペーサ変更の後に較正ステップを行わなくても、スペーサの有無に関係なく許容できる停止挙動を提供する。
【0033】
図1a及び図2aは、センサ電極構造が複雑な三次元形状を有する距離検知のための容量測定技法に関連する基本的な問題を簡単な機構で示している。図1aは、例えばX線源のケーシングでありえる対象106を示す。このケーシング上に、導電性の表面105がある。この表面105は、検知電極であり、検知電極は、内部キャパシタCiを介して電圧源Usourceと接続される。ケーシング106及び検知電極105に対向して、素子101及び103がある。これらの素子101及び103は、グラウンドと接続される。これらの素子101及び103と検知電極105との間には、キャパシタンスCsense−groundがある。添え字sense−groundは、キャパシタンスが検知電極105と接地された素子101及び103との間にあることを表わす。更に、素子101及び103と検知電極105との間には、電界102及び104がある。
【0034】
電極を構造化することは、さまざまな接近方向に関してよりバランスのとれた挙動を達成することを助ける。図1bは、検知電極がオープン構造の検知領域を有することを除いて、同じ状況(例えばケーシング114を有する)を示している。全体のセンサは、いくつかの導電領域113及びいくつかの非導電領域117を有する。検知電極のこれらの部分は、キャパシタCi115を介して、電圧源Usource116と一緒に接続される。検知電極と対向して、素子109又は111がある。これらの素子と検知電極の導電領域113との間には、電界110又は112の流線がある。
【0035】
容量3次元センサ電極を平坦な側面において相対的に大きい対象に接近させること(状況A)は、コーナ部においてセンサ電極を接近させること(状況B)と比較して、より大きいレンジにわたって非常により高い感度を示す。特に、対象のジオメトリサイズのオーダの距離だけ離れたところで、この現象は最も効果的である。衝突防止のための距離検知の応用分野の場合、停止距離の最小の開きを与えるので、これらの効果によるセンサ特性の最小の開きを有することが望ましい。特定の効果が常に存在するので、特定の効果が、受け入れられなければならないことが明らかである。しかしながら、効果は、閉じた表面を有する代わりに、機械部分の3次元表面において検知電極を構造化することによって、低下されうる。
【0036】
図2aは、素子101又は103と検知電極105との間の距離に依存する出力電圧Uoutを表す。この図は、図1の状況による、接近する素子102又は103の感度を示している。グラフ201は、接近する素子101の特性を示す。グラフ202は、接近する素子103の特性を表す。はっきりした違いが、グラフ201と202との間にある。従って、同じ距離xにおいて、異なる電圧Uout,1及びUout,2がある。素子101は、素子103より低い電圧Uout,1を生成し、素子103は、より高い電圧Uout,2を生成する。両方の電圧Uout,1及びUout,2の間の違いは、測定誤差に対応する。
【0037】
図2bは、接近する素子109又は111に関する同じ特性をそれぞれ示している。 図2bによる測定の誤差(Uout,1及びUout,2の間の違い)が、ここで大幅に低減されることが見られる。
【0038】
図3は、図1a及び図1bの状況による回路を概略的に示す。検知電極は、内部キャパシタCi302を介して、電圧源Usource301に接続される。素子101、103、109又は111と検知電極との間の電界は、それぞれキャパシタンスCsense−ground303をもたらす。このキャパシタンスCsense−ground303は、素子101、103、109又は111と検知電極との間の距離に依存する。
【0039】
改良された感度均一性のために検知電極を構造化する記述された技法は、Bestの医用システムの心臓血管イメージングシステムのX線管上の衝突防止センサに適用されている。技法は、カバーのセンシティブな全領域において「Bodyguardシステム」のより良好な停止挙動を達成する際に重要である。特定のシステムに関して、4つのセンサ401、403、404及び406の組402が、X線管上のカバー内に四象限に配置され、図4aに示されるように4つの完全に閉じた領域のセンサ構造を有する。4つのセンサ401、403、404及び406は、非導電障壁405によって隔てられている。本発明による構造化された電極を実現することは、停止距離のかなりより小さいバリエーションをもたらすと同時に、管カバーの前の任意のスペーサユニットのセンサ電極においてより良好な感度を提供する。
【0040】
図4bは、本発明によるセンサを有する以外は同じである機構410を示している。センサ407、408、409及び413は、導電領域411及び412及び非導電領域414、415及び416を有する。以前の段落で述べたように、(大きい)平坦な領域のセンサ感度は、これらの平坦な領域におけるセンサ構造に開口を採り入れることによって、コーナ部及びエッジ部におけるより低いセンサ感度を支持して、低下される。図4a及び図4bは、Poly−G2システムのX線管のカバー内部のセンサ電極構造の例を示している。基本的な電極構造は、各コーナ部及びエッジ部411において導電パターンを幅10mmのストライプに制限することによって、全領域の導電パターン(図4a)から、スケルトン形状のパターンに変えられている。それに加えて、5mm幅の斜めのストライプ412が、大きな開口に加えられることにより、これらの領域があまりに低い局所的な感度をもたらすことを防ぐ。
【0041】
特定の設計ツールが、検知機能が設計されなければならないケーシングのその特定のサイズ及び形状を有する所与のアプリケーションについて、成功する電極構造の設計を容易にするために開発されるであろう。
【0042】
フィリップスメディカルシステムズ事業部内で、本発明がその性能をアップグレードすることができるとともに、それが近い将来実現されるいくつかのアプリケーションが存在する。これらのアプリケーションは、PolyG2管カバー、クレアシステム及びFD10及びFD20X線検出器ユニットの管カバーのような、X線イメージングシステムの心臓血管グループからのシステムを含む。図5a、図5b及び図5cは、衝突防止のための容量タイプの近接センサが実現される位置の標示に関して、これらのシステムのピクチャを示す。
【0043】
図5a、図5b及び図5cは、心臓血管医療製品を示し、患者テーブル501、504、検出器ケーシング502、505上の衝突防止センサ及びX線管ケーシング503、506上の衝突防止センサが示されている。
【0044】
アプリケーションの医用システム分野から離れて、技法は更に、一般に、衝突が所望されない状況である機器のロボット操作を含むアプリケーションにとって興味がある。
【0045】
フィリップスメディカルシステムズ、ハンブルグによる汎用心臓血管X線Bodyguardのアプリケーション:PMSハンブルグは、医療産業に対する汎用X線システムのサブライヤである。X線システムに関するそれらの新しい開発の1つは、Tangoシステムである。Tango X線システム内において、非接触の対象検出装置が、セキュリティ概念の一部である。この装置は、可動X線システムの、X線検査室内の人又は機器との衝突を防ぐ。Tangoシステムは、患者テーブル及び検出器天井懸架構造を有する。対象検出システムは、システムの一部又はシステム全体の特に人との衝突、及び指摘としてX線検査室内部の家具又は他の対象との衝突を回避するために、Tangoシステムの動き制御によって解釈されることができる適切な(衝突)データを提供するべきである。インタフェースによって、装置は、距離及び方向に関して、天井懸架構造又はその一部との関連において検出される対象の位置のデータを提供する。
【0046】
図6は、PMSハンブルグGXR Tangoシステムの検出器天井懸架構造を示している。「容量衝突防止センサ」が実現されるさまざまな異なる位置が図示されている。図6は、テレスコープ603、スウィングアーム602、センサ管アセンブリ604及びセンサスイングアーム601を示している。
【0047】
図7は、コンピュータ可読媒体が格納されうるコンピュータ701を示している。コンピュータは、キーボード703、ディスプレイ704及びCPU702を有する。
【0048】
検知電極を有する容量タイプの近接センサであって、検知電極が、導電領域113及び非導電領域117を有する表面を有し、センサが、検知電極と対象109、111との間の電界110、112を測定するように適応される、近接センサが提供される。更に、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のためのシステム、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置と対象との間の衝突を回避する方法、プログラム要素及びコンピュータ可読媒体、が記述される。接近する対象の感度がセンサ自体の特別なジオメトリからの改善された独立性を示す容量タイプの近接センサが開示される。
【0049】
本発明は、図面及び前述の記述に詳しく図示され記述されているが、このような図面及び記述は、説明的又は例示的なものと考えられるべきであり、制限的なものとして考えられるべきではない。本発明は、開示された実施形態に制限されない。開示された実施形態の他のバリエーションは、図面、開示及び添付の請求項の検討に基づいて、請求項に記載の本発明を実施する際に当業者によって理解され、達成されることができる。請求項において、「含む、有する」なる語は、他の構成要素又はステップを除外せず、不定冠詞は、複数性を除外しない。単一のプロセッサ又は他のユニットは、請求項に列挙されるいくつかのアイテムの機能を果たすことができる。特定の手段が相互に異なる従属請求項に列挙されているという単なる事実は、これらの手段の組み合わせが有利に使用されることができないことを示さない。コンピュータプログラムは、例えば他のハードウェアと共に又はその一部として供給される光学記憶媒体又はソリッドステート媒体のような適切な媒体上に記憶され/配布されることができるが、インターネット又は他のワイヤード又はワイヤレス通信システムを介するように、他の形式でも配布されることができる。請求項における任意の参照符号は、請求項の範囲を制限するものとして解釈されるべきでない。
【符号の説明】
【0050】
101 (接地された)対象、102 電界の流線、103 (接地された)対象、104 電界の流線、105 検知電極、106 カバー、107 内部キャパシタンスCi、108 電圧源Usource、109 (接地された)対象、110 電界の流線、111 (接地された)対象、112 電界の流線、113 検知電極の導電領域、114 カバー、115 内部キャパシタンスCi、116 電圧源Usource、117 検知電極の非導電領域、201 検知電極の側面に接近する対象のグラフ、202 検知電極のコーナ部に接近する対象のグラフ、203 検知電極の側面に接近する対象のグラフ、204 検知電極のコーナ部に接近する対象のグラフ、301 電圧源Usource、302 内部キャパシタンスCi、303 可変Csense−ground(対象と検知電極との間の距離に依存する)、401 検知電極、402 X線管のカバー、403 検知電極、404 検知電極、405 非導電障壁、406 検知電極、407 検知電極、408 検知電極、409 検知電極、410 X線管のカバー、411 検知電極の導電領域、412 検知電極の導電領域、413 検知電極、414 検知電極の非導電領域、415 検知電極の非導電領域、416 検知電極の非導電領域、501 患者テーブル、502 検出器ケーシング上の衝突防止センサ、503 X線管ケーシング上の衝突防止センサ、504 患者テーブル、505 検出器ケーシング上の衝突防止センサ、506 X線管ケーシング上の衝突防止センサ、601 センサスイングアーム、602 スイングアーム、603 テレスコープ、604 センサ管アセンブリ。
【特許請求の範囲】
【請求項1】
検知電極を有する容量タイプの近接センサであって、前記検知電極が、導電領域及び非導電領域をもつ表面を有し、前記センサが、前記検知電極と対象との間の電界を測定する、センサ。
【請求項2】
前記対象は接地される、請求項1に記載のセンサ。
【請求項3】
前記導電領域は互いに電気的に接続される、請求項1又は2に記載のセンサ。
【請求項4】
前記導電領域は、処理エレクトロニクスに電気的に接続される、請求項1乃至3のいずれか1項に記載のセンサ。
【請求項5】
前記表面は、実質的に平坦な領域を有し、これらの実質的に平坦な領域は、非導電領域を有する、請求項1乃至4のいずれか1項に記載のセンサ。
【請求項6】
前記表面は、実質的に非平坦な領域を有し、これらの実質的に非平坦な領域は、導電領域を有する、請求項1乃至5のいずれか1項に記載のセンサ。
【請求項7】
前記導電領域は、前記検知電極の全体の寸法のサイズにあわせて最適化される寸法を有し、それにより、前記構造全体の領域においてセンサ感度の均一性を最適化する、請求項1乃至6のいずれか1項に記載のセンサ。
【請求項8】
前記センサの感度は、前記センサの形状から実質的に独立している、請求項1乃至7のいずれか1項に記載のセンサ。
【請求項9】
前記対象は、動物又は人間である、請求項1乃至8のいずれか1項に記載のセンサ。
【請求項10】
請求項1乃至9のいずれか1項に記載のセンサを有する医用X線診断及び/又はX線治療及び/又は核診断/治療のための装置。
【請求項11】
医用X線診断及び/又はX線治療及び/又は核診断/治療のためのシステムであって、
医用X線診断及び/又はX線治療及び/又は核診断/治療のための装置と、
請求項1乃至9のいずれか1項に記載のセンサを有する対象と、
を有するシステム。
【請求項12】
医用X線診断及び/又はX線治療及び/又は核診断/治療のための装置と対象との間の衝突を回避する方法であって、
請求項1乃至9のいずれか1項に記載のセンサと前記対象との間の距離を測定するステップと、
前記距離が小さい場合、前記装置と前記センサとの間の接近を止めるステップと、
を含み、前記装置が前記センサを有する、方法。
【請求項13】
プロセッサによって実行されるとき、請求項12に記載の方法を実施するように適応されるプログラム要素。
【請求項14】
請求項13に記載のプログラム要素を記憶したコンピュータ可読媒体。
【請求項1】
検知電極を有する容量タイプの近接センサであって、前記検知電極が、導電領域及び非導電領域をもつ表面を有し、前記センサが、前記検知電極と対象との間の電界を測定する、センサ。
【請求項2】
前記対象は接地される、請求項1に記載のセンサ。
【請求項3】
前記導電領域は互いに電気的に接続される、請求項1又は2に記載のセンサ。
【請求項4】
前記導電領域は、処理エレクトロニクスに電気的に接続される、請求項1乃至3のいずれか1項に記載のセンサ。
【請求項5】
前記表面は、実質的に平坦な領域を有し、これらの実質的に平坦な領域は、非導電領域を有する、請求項1乃至4のいずれか1項に記載のセンサ。
【請求項6】
前記表面は、実質的に非平坦な領域を有し、これらの実質的に非平坦な領域は、導電領域を有する、請求項1乃至5のいずれか1項に記載のセンサ。
【請求項7】
前記導電領域は、前記検知電極の全体の寸法のサイズにあわせて最適化される寸法を有し、それにより、前記構造全体の領域においてセンサ感度の均一性を最適化する、請求項1乃至6のいずれか1項に記載のセンサ。
【請求項8】
前記センサの感度は、前記センサの形状から実質的に独立している、請求項1乃至7のいずれか1項に記載のセンサ。
【請求項9】
前記対象は、動物又は人間である、請求項1乃至8のいずれか1項に記載のセンサ。
【請求項10】
請求項1乃至9のいずれか1項に記載のセンサを有する医用X線診断及び/又はX線治療及び/又は核診断/治療のための装置。
【請求項11】
医用X線診断及び/又はX線治療及び/又は核診断/治療のためのシステムであって、
医用X線診断及び/又はX線治療及び/又は核診断/治療のための装置と、
請求項1乃至9のいずれか1項に記載のセンサを有する対象と、
を有するシステム。
【請求項12】
医用X線診断及び/又はX線治療及び/又は核診断/治療のための装置と対象との間の衝突を回避する方法であって、
請求項1乃至9のいずれか1項に記載のセンサと前記対象との間の距離を測定するステップと、
前記距離が小さい場合、前記装置と前記センサとの間の接近を止めるステップと、
を含み、前記装置が前記センサを有する、方法。
【請求項13】
プロセッサによって実行されるとき、請求項12に記載の方法を実施するように適応されるプログラム要素。
【請求項14】
請求項13に記載のプログラム要素を記憶したコンピュータ可読媒体。
【図1a】

【図1b】
【図2a】

【図2b】
【図3】
【図4a】
【図4b】

【図5a】
【図5b】

【図5c】
【図6】
【図7】

【図1b】
【図2a】
【図2b】
【図3】
【図4a】
【図4b】
【図5a】
【図5b】
【図5c】
【図6】
【図7】
【公表番号】特表2011−511265(P2011−511265A)
【公表日】平成23年4月7日(2011.4.7)
【国際特許分類】
【出願番号】特願2010−537575(P2010−537575)
【出願日】平成20年12月9日(2008.12.9)
【国際出願番号】PCT/IB2008/055162
【国際公開番号】WO2009/074953
【国際公開日】平成21年6月18日(2009.6.18)
【出願人】(590000248)コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ (12,071)
【Fターム(参考)】
【公表日】平成23年4月7日(2011.4.7)
【国際特許分類】
【出願日】平成20年12月9日(2008.12.9)
【国際出願番号】PCT/IB2008/055162
【国際公開番号】WO2009/074953
【国際公開日】平成21年6月18日(2009.6.18)
【出願人】(590000248)コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ (12,071)
【Fターム(参考)】
[ Back to top ]