
密接に統合されたNAV−COMの能力で既存のGNSSユーザ装置をアップグレードする実用的な方法
統合されたNav−Comの能力を、任意の全地球航法衛星システム(GNSS)のユーザ機器、例えばGPS受信機に加える方法は、既存のユーザ機器のハードウェアを修正する必要がない。この概念を防衛高度GPS受信機(DAGR)に適用して、低地球軌道(LEO)衛星、例えばイリジウムと、GPS又は他のGNSSシステムとを組み合わせて、位置、航法、及びタイミング(PNT)の、正確さ、完全性、及び利用可能性をかなり改善して、精密に結合された航法と通信のモードを合成することによって、新たな通信の拡張を利用できるようにする。既存のDAGRと差込み式のiGPS拡張モジュールとの間における、時間の同期化の安定性を、要求されるほぼ20psレベルにするために、専用の広帯域の基準信号をiGPSモジュールによって生成して、既存のアンテナポートを介してDAGRに接続して、DAGRのハードウェアの修正を不要にする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、海軍研究試験所(Naval Research Laboratory)によって与えられた海軍省の契約N00173−08−C−2074のもとで政府の支援を受けて作成された。政府は、本発明における一定の権利を有する。
【0002】
本発明は、既存の全地球航法衛星システム(global navigation satellite system, GNSS)ユーザ機器を修正する必要なく、高性能の密接に統合された航法と通信(navigation and communication, Nav-Com)の能力を追加するために、既存のGNSSユーザ機器をアップグレードする方法に関する。既存のGNSSユーザ機器は、例えばGPS受信機である。更に、本発明は、iGPSを既存のGNSSユーザ機器に追加する装置に関する。この装置は、差し込み式の拡張モジュールの形式をとり得る。
【0003】
本発明の好ましい実施形態では、iGPSとして知られている、特定の密接に統合されたNav−Comシステムにアップグレードする。iGPSは、低地球軌道(Low Earth Orbiting, LEO)衛星から受信した信号の搬送波位相を利用して、専用の広帯域の基準信号を提供する。LEO衛星は、例えばイリジウムである。この実施形態では、iGPSへのアップグレードは、以下によって達成される。
【0004】
・装置の基準発振器にロックされた専用の広帯域の基準信号の位相を、GNSSユーザ機器における既存のアンテナポートを使用してGNSSユーザ機器に供給する。
【0005】
・到来GNSS(又はGPS)信号と、既存のGNSSユーザ機器の基準発振器に対する基準信号とのコヒーレントな相関関係を、既存のGNSSユーザ機器に生成させる。
【0006】
・コヒーレントな相関関係を既存のデータポートを通してNaV−Comプロセッサに送り返して、装置の基準発振器とイリジウムとの更なる相関関係と組み合わせて、位置、速度、及び/又は時間に対するより精密な解を導き出す。
【0007】
GNSSユーザ機器は、防衛高度GPS受信機(Defense advanced GPS Receiver, DAGR)であり得る。NaV−Comプロセッサと、専用の基準信号生成コンポーネントは、単一の一体型モジュールに設けられている。DAGRを修正する必要なしに、このモジュールをDAGRの既存のポートのプラグに差し込む。この構成は、搬送波位相を使用して、DAGRにおける位置、航法、及びタイミング(Position, Navigation, and Timing, PNT)の、正確さ(accuracy)、完全性(integrity)、及び利用可能性(availability)を、かなり、場合によっては数千倍に改善でき、地球上のどこでも、1分のオーダの時間フレームで、デシメートルレベル以下の位置決定に収束する可能性を有する。本発明は、高精度のGNSSの搬送波位相の観測可能量をより簡単に利用して、干渉のある状態又は妨害を受けた環境のもとであっても、PNTの利用可能性を改善することを可能にする。更に、本発明は、精密に結合された航法と通信のモードを合成することによって、新たな通信の拡張が得られるようにする。適切な設計と統合化とを用いて、アップグレードを取り付け易くすると、高度な能力を得るための配備とライフサイクルのコストとをかなり下げることができる。
【背景技術】
【0008】
特に、このようなインフラストラクチャが本質的にグローバルであるならば、密接に統合された航法と通信は、米国の軍用、民生用、及び商用の用途に対して、広範囲の新たな補足的な能力をもたらす。通信のインフラストラクチャが、リアルタイムのデータとタイミングとを補助することによって、航法を改善でき、一方で、航法のインフラストラクチャが、時間と位置とを補助することによって、通信を改善する。グローバルなインフラストラクチャを用いると、出資者は、規模と範囲の経済性をより良く享受できる。航法と通信のコンポーネントのアーキテクチャをより密接に統合すると、より大きな相互の相乗効果を得ることができる。
【0009】
統合されたグローバルなNav−Comシステムの特に注目すべき1つの例は、iGPSである。iGPSは、イリジウムとGPSとのグローバルな衛星の配置を融合することによって作られた。海軍省は、イリジウムを使用する契約を、ボーイングが主導するチーム(Boeing led team)に与えて、補助的なデータ、タイミング、及びレンジングの情報を、認可されたGPSユーザに提供した。この追加情報は複数の恩恵を与え、特に、干渉を阻止する性能をかなり改善して、GPSが動的なユーザプラットフォームをより高速に捕捉する手段を与えた[グレンギボンズ、「ボーイングはNRL契約を勝ち取って、イリジウム/GPSの開発を継続する」、インサイドGNSS、2008年9/10月(Glen Gibbons, "Boeing Wins NRL Contract to Continue Iridium/GPS Development", Inside GNSS, September/October 2008)]。
【0010】
一般に、iGPSと、より広域のグローバルなNav−Comの解集合とによって、位置、航法、及びタイミング(PNT)の、正確さ、完全性、及び利用可能性が、かなり改善され得る。従来はGPS衛星が高軌道をゆっくりと移動していた。これに対して、空中のLEO衛星の高速の角運動は、空間ダイバーシティを大幅に高めた。LEOとGPSの衛星の搬送波位相を用いると、地球上のどこでも、1分のオーダの時間フレームで、デシメートルレベル以下の位置決定を自動追跡できる。例えば、米国特許6,373,432と、5,812,961と、5,944,770を参照すべきである。
【0011】
搬送波位相の使用は、かなりの恩恵をユーザに与える。GPSのL1波長は、およそ19cmである。GPSの固有の精度は、この波長よりもはるかに低い。GPSのL1に対する、タイミング及びレンジングの一般的な誤差量は、0.5cmのオーダのRMS、又は時間に関して20psになる。この精度が、上述の全体的な位置決めの正確さと、完全性と、干渉の阻止とを達成する鍵である。米国特許7,372,400に記載されているように、iGPSのインフラストラクチャを使用して、(イリジウムの天体暦(ephemeris)とGPSのデータの削除とに対して)データを補助して、且つ(基準局でイリジウムのクロックを較正して、精密なイリジウムの搬送波位相の補正をユーザにリアルタイムで放送して)時間の安定性について送信することができる。
【0012】
逆も真である。ユーザの位置と時間とが十分に分かると、改善された通信に関連する新たな能力が可能になる。例えば、ユーザは各々の位置とタイミングとが十分に分かるので、ユーザと衛星との間において、極めて安定した仮想のクロックに基づいて搬送波を設定できる。これは、ロバストでコヒーレントな通信リンクを設定して、例えば、耐干渉性と低い通信遮断率とをサポートすることを可能にする。
【0013】
搬送波位相は、従来は航法の目的で軍部によって利用されていなかった。その代わりに、信号を二乗する技術が用いられていた。これは、信号と雑音との両者を二乗する望ましくない結果を有する。このため、不足を補うより高電力の衛星を開発して打ち上げることについて軍部が検討する時に、GPSの信号電力を無駄にした。iGPSのインフラストラクチャは、既存のGPSの電力をより効率的に使用できる。
【0014】
グローバルな統合されたNav−Comの更なる恩恵は、更なる相乗効果から得られる。GPSのユーザ機器と他のデバイスとを用いると、暗号鍵を安全に配布する必要があることが多い。適切なインフラストラクチャがなければ、プロセスが煩雑になり得る。例えば、一方向のみのデータリンクを用いると、ユーザとデバイスは、鍵の管理機関を認証できない場合がある。ロバストでグローバルな双方向の通信システムは、ユーザとデバイスが世界のどこにいても、鍵を取り換える各要求を、ユーザとデバイスが認証できるようにすることによって、この問題を解決する。この使い易さによって、鍵の配布を安全で且つたやすくすることができる。
【0015】
iGPSの場合に、米国は、GPSに対するLEOベースの拡張の存在を直ぐに証明する機会がある。イリジウム衛星は、既に軌道上にあり、有効期間を2014年以降に延長することが計画されている(「イリジウム衛星LLCは配置の寿命を当初の予測よりもかなり延ばすと推定」、イリジウム衛星LLCの報道発表、2003年2月26日(Iridium Satellite LLC Estimates Constellation Life Span To Extend Well Beyond Original Predictions," Iridium Satellite LLC Press Release, February 26, 2003)を参照すべきである)。上述の海軍省の契約のもとで、ボーイングチームは、グローバルな地上のインフラストラクチャを開発して、既存のイリジウム衛星の配置に対する新たなフライトソフトウェアを2011年の始めまでに開発するであろう。このタイムテーブルでは、イリジウムの配置がその耐用年数を過ぎて劣化する前に、米軍と他の認可されたユーザとが新たな能力を効率的に利用するための適切な信号を空間中に数年間提供するであろう。
【0016】
しかしながら、iGPSの実施に対する重大な障害は、ユーザ機器に装備を施す労力とコストである。ユーザ機器は、例えば防衛高度GPS受信機(DAGR)であり、軍部が選んだユーザ機器のままである。現在、米軍は、数十万個のGPSユニットを配備している(「ロックウェルコリンズは200,000個目のDAGRと40,000個目のGPSエンジンを米国の陸軍に引き渡した」、ロックウェルコリンズの報道発表、2008年4月18日(Rockwell Collins delivers 200,000th DAGR and 40,000th GPS engine to the U.S. Army", Rockwell Collins Press Release, April 18, 2008))。更により多くのものが、既に調達過程にある。米国政府は、1ユニット当たりだいたい2000ドルで、これらのユニットを購入した。
【0017】
軍部又は他のユーザがiGPSを採用する場合に、必要とされるのは、ユーザ機器のインストール済みのベースを利用する簡単なやり方である。先行技術では、受け入れ難い2つのアプローチを以前に提示した。即ち、(i)密接に統合できる新たな精密なiGPSのインターフェイスを受け入れるために、既存のユーザ機器のハードウェアを修正することと、(ii)既存のユーザ機器を、最初から設計された新たな密接に統合されたiGPSのユーザ機器に完全に交換することである。
【0018】
第1のアプローチは、密接に統合された精密なiGPSのインターフェイスを取り入れることに伴う経済的及び技術的なリスクがあるので、かなり懸念される。特に、DAGRは、外部発振器の入力を備えていないので、これを加えなければならない。この移行に幾らかかり、DAGRのコンポーネントの交換がどの程度まで必要になるかは、不明である。更に、関連するロジスティックスと構成との統制の問題がある。即ち、複数のバージョンのDAGRのハードウェアがあるために、ユーザとリーダーシップとに対する管理が煩雑になる。その理由は、ハードウェアを修正すると、全規格のうちの多くを変更して管理することが必要になるからである。更に、ハードウェアの修正に伴う技術的なリスクがある。全範囲の環境条件において、GPSの信号処理コンポーネントとイリジウムの信号処理コンポーネントとの間に20psの安定性があることが、密接に統合したiGPSの搬送波位相の精度に必要である。位相の変動の影響を特に受け易いハードウェアコンポーネントは、GPSのRFのフロントエンドと、イリジウムのRFのフロントエンドと、GPSの発振器とを含む。航法処理アルゴリズムは、2つのコンポーネント間における搬送波位相のバイアスの緩やかなドリフトを許容できるが、熱又は機械的な乱れが極端である場合は、システムは有益な性能を提供できない。異なる熱及び機械的ストレスの影響を受ける異なる筐体の中に、イリジウムのコンポーネントとGPSのコンポーネントとを入れる必要があるので、DAGRのレイアウトが技術的なリスクを高める。
【0019】
更に、第2のアプローチは、抵抗に遭う。米国がGPS機器に既にかなり投資していることを考慮すると、既存の在庫品の撤去を正当化するのは難しい。
【0020】
LEOを拡張したGPS Nav−Comシステムの広範囲にわたる恩恵を、潜在的な米国の軍隊と、民間と、市場の出資者に明示する手段が必要である。この目的のために、GPSの既存のユーザのユーザ機器をアップグレードする実用的で魅力的な方法である、イリジウムとGPSとを統合することによって形成されるiGPSの形態の存在証明をする必要がある。従って、言い換えると、既存のDAGRに対する、密接に統合したグローバルなNav−Comのアップグレードを生成する実用的な方法であって、任意のハードウェアの修正を必要とせずに、十分に必要な精度と性能とを提供する方法が必要である。
【発明の概要】
【0021】
従って、本発明の目的は、密接に統合されたNav−Comの能力でGNSSユーザ機器をアップグレードする方法を提供することである。
【0022】
本発明の第2の目的は、既存のユーザ機器に遡及的に適用できる、密接に統合されたNav−Comの能力で既存のGNSSユーザ機器をアップグレードする実用的な方法を提供することである。
【0023】
本発明の第3の目的は、既存のユーザ機器に遡及的に適用できるGNSSユーザ機器のためのユーザハードウェアを提供することである。
【0024】
従って、本発明は、元のGPS機器のハードウェアを修正する必要なく、航法の性能を拡張するために、GPSのユーザ機器をアップグレードして、他のGNSSシステムに密接に統合する方法を提供することである。この方法は、密接に統合されたNav−Comのユーザ機器の重大なr.f.コンポーネント間の不都合な差分位相のバイアスのドリフトを制限する、実用的でコスト効率の良い手段を提供する。好ましい実施形態では、性能をアップグレードしたものは、密接に統合されたグローバルなNav−Comの能力を可能にして、iGPS及び任意の他のGNSSシステムと互換性を有する。
【0025】
本発明の好ましい実施形態の原理によると、本発明の目的は、既存の全地球航法衛星システム(GNSS)ユーザ機器をアップグレードする方法であって、第1のGNSSユーザハードウェアを提供するステップと、前記第1のGNSSユーザハードウェアと分かれている、既存の第2のGNSSユーザデバイスを提供するステップと、前記第2のGNSSユーザデバイスのハードウェアを修正することなく、前記第1のGNSSユーザハードウェアを、既存のポートを介して、前記第2のGNSSユーザデバイスに接続するステップと、を含み、前記第1のGNSSユーザハードウェアは、第1の発振器と、航法/通信プロセッサと、を含み、前記第1の発振器は、精密なコード化された基準信号の生成器を駆動し、前記精密な符号化された基準信号の生成器は、基準信号を生成して、前記基準信号を既存の第2のGNSSユーザデバイスに供給するように構成されており、前記航法/通信プロセッサは、到来GNSS信号と前記基準信号とのコヒーレントな相関関係について、前記第2のGNSSユーザデバイスから受信すると、位置、航法、及び/又はタイミングの信号を生成するように構成されており、前記第2のGNSSユーザデバイスは、少なくとも1つの既存のポートと、第2の発振器と、を含み、前記第2の発振器は、到来GNSS信号と、アドオンの前記第1のGNSSユーザハードウェアによって生成された前記基準信号との前記コヒーレントな相関関係を生成して、前記コヒーレントな相関関係を前記第1のGNSSユーザハードウェアに送るように構成されている、方法によって達成される。
【0026】
更に、本発明の目的は、上述の方法の第1のGNSSユーザハードウェアに対応するアップグレードのハードウェアによって達成される。アップグレードのハードウェアは、安定した基準信号を生成して、安定した基準信号を第2のGNSSユーザデバイスに供給して、第2のGNSSデバイスからのコヒーレントな相関関係と、それ自身の生の精密な相関関係とを組み合わせて、位置、速度、及び/又は時間に対する改善された解を導き出すように構成されている。
【0027】
本発明の方法と装置の両者の実施形態では、少なくとも1つの既存のポートを使用して、第1のGNSSユーザハードウェアを既存の第2のGNSSユーザデバイスに結合し、少なくとも1つの既存のポートは、アンテナポートとデータポートとを含み、第1のGNSSユーザハードウェアは、基準信号を、アンテナポートを通して、第2のGNSSユーザデバイスに送るように構成されており、第1のGNSSユーザハードウェアは、指示命令を第2のGNSSユーザデバイスに送って、コヒーレントな相関関係を、データポートを通して受信するように構成されている。
【0028】
本発明の好ましい実施形態の更に別の態様によると、第1のGNSSユーザハードウェアは、イリジウム受信能力を含み、第2のGNSSユーザデバイスは、全地球測位システム(GPS)の受信機であり、イリジウムの信号とGPSの信号は、共通のアンテナを通して入力されるのが好ましい。この実施形態では、第1の発振器は、GPSのr.f.のタイミング及びレンジングの測定値と、イリジウムのr.f.のタイミング及びレンジングの測定値との両者に対する、共通の精密な発振器の搬送波位相の基準を提供する。更に、第1のGNSSユーザハードウェアは、イリジウム送信能力を含み、一方で、第1又は第2のGNSSユーザ受信機は、Yコード、Mコード、C/Aコード、ガリレオ(Galileo)、グロナス(GLONASS)、及び/又はコンパス(COMPASS)の能力を含み得る。基準局は、視界内の衛星のコードと搬送波とを較正して、較正データを通信衛星にテレメータで送信する。通信衛星の放送された出力は、第1のGNSSユーザハードウェアに接続され、通信衛星の較正データを用いて、位置、速度、及び時間の解を改善する。
【0029】
本発明の好ましい実施形態で使用されている航法/通信プロセッサは、到来信号の搬送波位相を使用して、ユーザ機器の位置、速度、及び時間をモデル化して推定するために、カルマンフィルタを含み得る。カルマンフィルタは、慣性計測ユニット(inertial measurement unit, IMU)からの観測可能なデータを任意に利用し得る。
【0030】
更に、第1のGNSSユーザハードウェアは、送信機コンポーネントを含み得る。送信機コンポーネントは、その改善された位置、速度、及び時間の推定値を使用して、その送信の時間と周波数の同期化を改善する。送信は、地域通信ネットワーク、衛星ネットワーク、又は低地球軌道衛星のグローバルネットワークに接続される。
【図面の簡単な説明】
【0031】
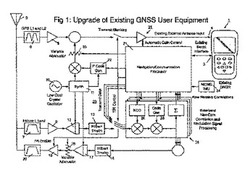
【図1】本発明の好ましい実施形態の原理に従って構築された、既存のGNSSユーザ機器と拡張モジュールとを含む、アップグレードされたGNSSシステムの概略図である。
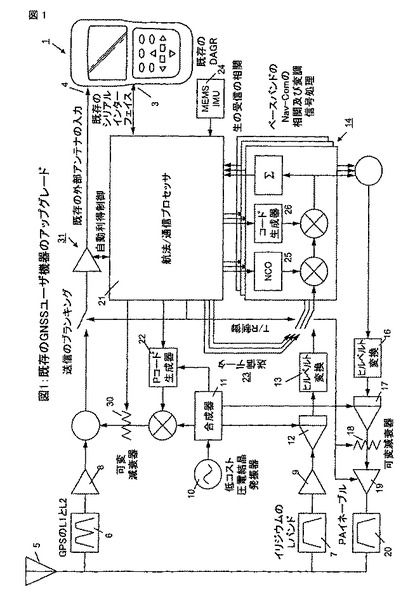
【図2】図1のシステムのブロック図である。
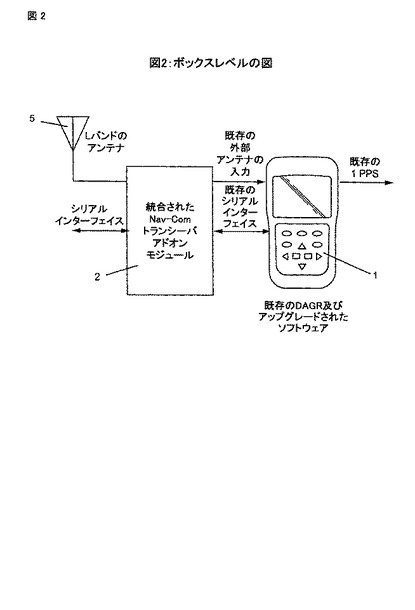
【図3】図1のシステムによって使用される、タイミング、レンジング、及びデータの信号を示す概略図である。
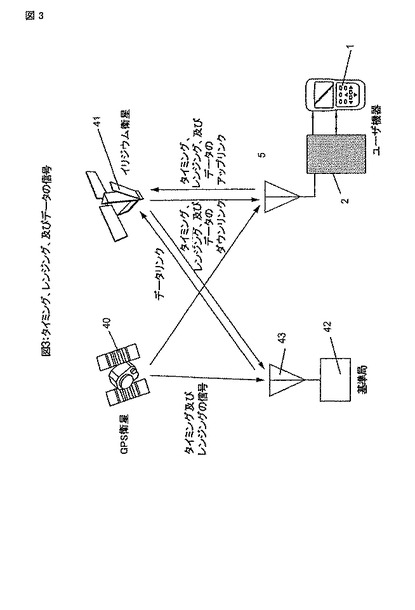
【図4】好ましい方法に従って、基準入力を初期設定して制御するサブルーチンのフローチャートである。
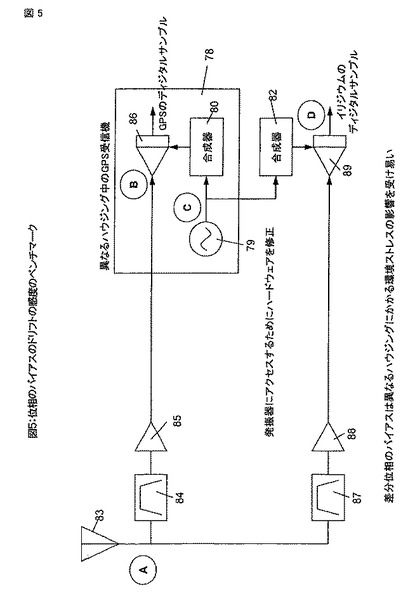
【図5】位相のバイアスのドリフトの感度のベンチマークを示す概略図である。
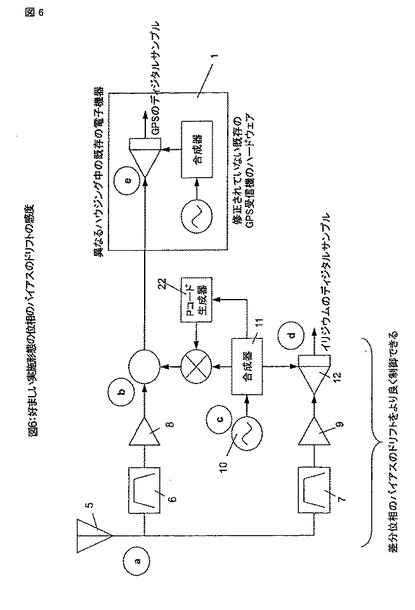
【図6】好ましい方法の位相のバイアスのドリフトの感度を示す概略図である。
【発明を実施するための形態】
【0032】
図1と2は、アップグレードされたGNSSシステムを示す最重要の機能図である。アップグレードされたGNSSシステムは、防衛高度GPS受信機(DAGR)1として示されている既存のGNSSユーザ機器と、本発明の好ましい実施形態の原理に従って構築された拡張されたユーザハードウェアとを含んでいる。拡張されたユーザハードウェアは、図2に示されている別個のアドオン拡張モジュール2の形式を任意にとり得る。拡張されたユーザハードウェアは、ユーザ機器に対する既存のインターフェイスに差し込むように構成されている。例示的なDAGRにおけるユーザ機器は、双方向のシリアルポート3と、外部アンテナの入力4とを含んでいる。
【0033】
示されているユーザハードウェアと方法とを、DAGR以外のGNSSユーザ機器に適合させる又は修正することも、本発明の範囲内であることが、当業者に分かるであろう。更に、本発明では、密接に統合されたNav−Comの能力を実施するために既存のGNSSのハードウェアを修正する必要はないが、それにも関わらず、他の理由で、このようなハードウェアを修正してもよいことが、当業者に分かるであろう。更に、既存のGNSSのハードウェアを修正しなくても、(例えば、図6に関連して後述されるように)向上したPNTデータの入力に適応させるために、既存のGNSSユーザ機器のソフトウェアを修正することが必要な場合がある。DAGRの場合に、兵站部(depot)レベルで又は潜在的には戦地でさえも、ソフトウェアをアップグレードできる。一般に、ユーザ機器の製造業者と協力して、従来のGNSSユーザ機器に備えられているソフトウェアを簡単に変更して、より高精度の入力に適応させ、既存の機器を容易に改造して、アップグレードに適応させることができる。
【0034】
ユーザ機器の具体的なパッケージングは多くの形態をとり得るが、図2は好ましい実施形態を示しており、Nav−Comの拡張電子機器は別個のアドオンモジュール2に収容されている。別個のアドオンモジュール2は、既存のDAGRにインターフェイスで接続する。既に記載したように、本発明の1つの目的は、既存のDAGRのハードウェアのインターフェイスを維持して、アップグレードをできるだけ容易にすることである。従って、修正されていないDAGRの様々な寄せ集めを有する全てのDAGRの在庫に対する構成制御を維持することは、実際に役立つであろう。
【0035】
図1と2に示されているように、共通のアンテナ5は、GPSのL1及びL2の受信信号と、イリジウムのLバンドの送信及び受信信号とに使用される。それにも関わらず、特に、イリジウム以外のLEO衛星が使用される場合、又は汎用市販(commercial off the shelf, COTS)のデュアルバンドのGPSのアクティブアンテナが使用される場合は、複数のアンテナを備えてもよいことが分かるであろう。各入力は、GPS又はイリジウムの該当する帯域に対するそれぞれのブロック6、7によって帯域フィルタにかけられて、次に、それぞれの前置増幅器8、9に供給される。
【0036】
発振器10は、トランシーバに対する共通の時間軸の役割をするのが好ましい。本発明の目的は、この発振器10に対するコストを含むコンポーネントのコストを最低限に維持することであるので、低コストの圧電結晶発振器が示されているが、類似の又はより良い性能を備えた1つ以上の他の発振器を代わりに使ってもよいのは当然である。発振器10は、合成器11を駆動する。これは、必要なA/Dと、D/Aと、局部発振器の信号を全てユニットに提供する。
【0037】
イリジウムの入力は、A/Dコンバータ12によってディジタル化されて、次に、ヒルベルト変換処理機能又は回路13に供給される。ヒルベルト変換処理機能又は回路13は、到来信号の複素数表現を、信号プロセッサのバンク14に提供する。同じやり方で、信号プロセッサのバンク14の複素数のディジタル化されたイリジウムの出力を組み合わせて、信号プロセッサのバンク14から、ヒルベルト逆変換処理関数又は回路16にルーティングして、D/Aコンバータ17によってD/A変換して、可変減衰器18によって電力をスケーリングして、増幅器19によって増幅して、その後で、変調器20に供給して、アンテナ5を通して送信する。
【0038】
例えば、2005年2月11日のUS WP 7D/14R2から入手可能な「イリジウム衛星システムのサービスリンクの特徴に関する作業文書(Working Document on Service Link Characteristics of the Iridium Satellite System)」という名称の刊行物に記載されているように、周波数及び時分割多重アクセス方式に従って、イリジウムの送信及び受信機能を切り替えてもよい。この中に記載されているように、各90msの反復フレームは、1つの20.32msのダウンリンクのページングスロットと、各8.28msの4つのデュプレックスのアップリンクとダウンリンクとのテレフォニスロットとに分割される。統合されたユニットのイリジウム部分は、イリジウムとGPSとの両者を同時に受信できる。イリジウムのユーザ機器が送信しているときに、GPSは、帯域外干渉の影響を受け易い傾向があるので、GPSの入力に対して送信のブランキングを実施する。イリジウムの1つのみの時間スロットがアップリンクに使用される場合に、GPSの休止時間に対する8.28ms/90msのデューティサイクルは、許容可能な〜0.1dBの損失に相当する。
【0039】
中央の航法/通信プロセッサ21は、ユーザ機器の内部の動作を指示する。中央の航法/通信プロセッサ21は、信号プロセッサのバンク14によって実施される複数のイリジウム相関器に対する制御ループドライバと、GPSのPコード生成器22(単に説明の目的で、プロセッサ21の外部に示されている)と、送信及び受信機機能に対する構成制御23と、オプションの微小電気機械システム(micro-electromechanical system, MEMS)の慣性計測ユニット(IMU)24とDAGRとに対するインターフェイスとを含む。更に、プロセッサ21は、カルマンフィルタの形式で、ユーザ機器の主要な推定能力を提供する。これは、利用可能な情報を最適に組み合わせる。利用可能な情報は、イリジウムと、GPSと、IMU又は他のセンサ、例えば気圧計又は磁力計とからの情報を含む。
【0040】
統合されたNav−Comの全ての恩恵を確保するために、イリジウムの信号処理ブロック14は、到来受信信号の相関をとって、コヒーレント検波をする手段を提供する。ドライバ追跡ループは、信号プロセッサ14の中の数値制御発振器(numerically controlled oscillator, NCO)25に命令する。イリジウムのコード生成器26は、レプリカコードを合成する。レプリカコードは、各イリジウム衛星が放送すると分かっているものと一致する。イリジウムは、元々航法システムとなるように設計されておらず、イリジウムの場合は、スペクトラム拡散信号の直接シーケンスのチップを生成するために、ユーザに前もって分かっている予め特定された一連のメッセージビットで構成されるように、このレプリカコードを選択する。このアーキテクチャでは、到来イリジウム信号のタイミング(コード)と搬送波位相とを精密に決定できる。同じアーキテクチャを送信側に使用すると、出力のタイミング(コード)と搬送波位相とを精密に確実に制御できる。
【0041】
更に、合成器は、GPSのL1バンドの1575.42MHzにおける正弦波の局部発振器と、10.23MHzにおけるスクエアコードドライバクロックとを生成する。これらのクロックは、Pコード生成器22に供給される。Pコード生成器22は、ゼロのドップラで基準の受信機のクロックタイムのPコード信号を生成する。航法/通信プロセッサ21は、Pコード生成器22の開始時間を命令された値に初期設定できる。航法/通信プロセッサのGPS信号電力推定値によって補われた到来干渉電力推定値に基づいて、プロセッサ21は、可変減衰器30を積極的に制御して、Pコードの基準信号が、干渉を受けても検出されるほど十分に強いが、望ましくない干渉源になるほど強くないことを保証する。一連の自動利得制御(Automatic Gain Control, AGC)31は、航法/通信プロセッサ21によって監視される。AGC31は、到来した複合のGPS及び基準信号を、DAGR1にルーティングする。従って、プロセッサ21は、アンテナ端子から出てきた全ての電力を追跡して、DAGR又は既存のGPS受信機のハードウェアに結びつけられた一定の値に、電力を調整できる。DAGR又は既存のGPS受信機のハードウェアは、AGC及び/又はSFAP、或いはSTAPタイプの信号処理を行なう場合もあり、又は行なわない場合もある。更に、AGC及び/又はSFAP、或いはSTAPタイプの信号処理は、既存のポートを介して制御され統合され得る。基準信号電力の積極的な制御については、後述でより詳しく説明する。
【0042】
GPSのPコードを生成するのに、暗号化能力又は認証は必要ない。従って、DAGRのための拡張ハードウェア又はモジュールは、選択利用可能性のアンチスプーフィングモジュール(Selective Availability Anti-Spoofing Module, SAASM)のもとで制御されるものである必要はなく、従って、既存のDAGRとインターフェイスで接続するのに非常に実用的で容易であり得ることが分かるであろう。対象のGPS受信機が、市販のC/Aコード受信機である場合は、C/Aコードも使用できる。しかしながら、Pコードは相互相関性が極めて小さいので、できればPコードが好ましい。
【0043】
図1に示されているDAGR1は、12本のGPS追跡チャネルを含んでいる。12本のGPS追跡チャネルの各々は、軍用のSAASM暗号化アーキテクチャ内で動作できる。SAASMアーキテクチャは、C/Aコード(1.023MHzの粗い/捕捉信号)、Pコード(10.23MHzの精密信号)、又はYコード(10.23MHzの暗号化信号)を用いる任意の所定の衛星の動作を可能にする。航法/通信プロセッサ21は、シリアルポート3を介して、DAGR1と通信する。シリアルポート3によって、プロセッサ21は、SAASMチャネルごとに、コード及び搬送波の数値制御発振器(NCO)に個々に命令して、生の同相及び直角位相(I及びQ)のGPSの相関関係を返すことができる。
【0044】
好ましい実施形態では、GPS受信機を使用する任意の既存の統合化において、ケーブルを変更することなく、既存のGPS受信機の既存の1パルス/秒(Pulse Per Second, PPS)のインターフェイスをそのまま使用できる。GPSが利用可能でない場合に、アドオンモジュールにおけるイリジウム又は他のGNSSの受信能力は、既存のインターフェイスを介して1PPSを正確に駆動し続けることができる。
【0045】
図3は、図1と2に示されているグローバルなシステムのためのユーザ機器に関連する、衛星と基準局との構成を示している。ユーザ機器1、2、5の視野に、GPS衛星40とイリジウム衛星41の各々が1つ以上あり得る。世界中に設置されている基準局42は、視野の中の各衛星のクロックと天体暦とを較正する役割をする。各基準局42は、アンテナ43と信号処理部(示されない)とを組み込んでいる。この信号処理部と、ユーザ機器の信号処理部は、機能的に同等であるが、この信号処理部は、制御された環境で動作し、任意にラックマウントに集められ得る。
【0046】
例示的な実施形態では、GPSとイリジウムの衛星40、41の各々は、能力が必要とされる地球上のどこかにあるユーザ機器1、2、5と基準局42との両者の共通の視野を共有している。各衛星は、搬送波上に変調されたPRNレンジングコードを放送する。イリジウムは、航法衛星であるようにも、PRNレンジングコードを放送するようにも設計されていないので、1本以上の予め定められたデータビットストリームを使用して、同等の複製を合成する。基準局42は、衛星のクロックをリアルタイムで較正する役割をする。各基準局は、視界中の全ての衛星のコードと搬送波位相とを測定して、この情報をイリジウムのデータリンクを介してユーザにテレメータで送信する。ユーザ機器1、2、5は、視界中の各衛星40、41のコードと搬送波とを追跡して、更に、コードと搬送波位相との測定値を自身で生成して、基準局のデータに読み込む。更に、イリジウムは逆方向のデータ経路を提供しており、ユーザ機器1、2、5が、データを、この場合は中継のために基準局42に戻して、衛星にアップリンクできるようにしている。
【0047】
好ましいシステムのダウンリンク及びアップリンクのタイミング及びレンジングの機能は、タイミング及びレンジングの信号の搬送波位相に対して、センチメートルレベルの精度で実行される、即ち小さな変動を維持するのが好ましい。このような精度によって、低地球軌道(LEO)衛星の高速の角運動は、独立型GPSよりも正確さと完全性とをかなり改善できる。更に、干渉を受けたGPS信号の持続的なコヒーレントな統合を可能にするために、この精度は重要である。これを達成するために、図1に示されている慣性計測ユニット(IMU)24のような適切なフライホイールをフィードフォワードに使用して、時間と空間との両者においてGPSを追跡する。例えば、IMUが、センチメートルレベルの位置のフライホイールを提供でき、イリジウムが、高性能の、20psレベル(光速変換でセンチメートルレベル)のタイミングソースを提供できるならば、GPS信号を持続期間の間コヒーレントに統合できる。全体的な統合されたNav−Comシステムは、ロックイン増幅器に似ている。ロックイン増幅器は、繊細な物理学の実験で用いられることが多い。イリジウムと、リアルタイムの基準局の較正と、ユーザ機器内の、GPSとイリジウムとの間で使用される様々な局部発振器の安定した処理は、重要な設計事項である。干渉が存在する場合に、通常のGPS信号は、微弱過ぎて示すことができない。
【0048】
クロックパラメータを含む、衛星とユーザの位置状態を正確にモデル化して推定することによって、ユーザがかなりの動力を受けた場合であっても、iGPSは、到来GPS信号に対するレプリカの搬送波位相を、到来微弱信号の搬送波位相にほぼぴったり一致するセンチメートルレベルに設定する。干渉を受けた状態であっても、ユーザ機器は、誤差信号を次第に統合して、I成分とQ成分とを生成して、I成分とQ成分とを観測可能量として使用して、受信機の追跡ループを終えることができる。固有の精度も重要なアップリンク能力を可能にし、動力を受けても、アップリンクチャネルにおいて持続的な位相の安定性を生成できるユーザ機器を提供できる。
【0049】
何秒もの間隔にわたってセンチメートルレベルの位相に搬送波が安定している場合は、アップリンクの干渉阻止を改善して、LPI通信を続けることができる。ユーザが周波数と時間とに対するデータ変調を精密に拡散できるようにすることによって、このようなアップリンクの改善が実現される。
【0050】
航法/通信プロセッサは、ユーザ機器の処理とデータの流れとを制御する。航法/通信プロセッサは、ユーザの状態に基づく精密なモデルから構成されるカルマンフィルタと、ユーザ機器の処理と測定の雑音を最適に管理する手段とを含む。テーブル1は、重要な航法/通信プロセッサの属性のリストを提供する。
【表1】

【0051】
テーブル1に記載されている補助情報は、イリジウム衛星からデータリンクを介して提供される。観測可能量は、GPSと、イリジウムと、IMUとから集めた生の測定値である。オプションのセンサを更に備えてもよく、オプションのセンサは、低コストの磁力計と気圧計とを更に含む。テーブル1に記載されているカルマンフィルタの状態は、実際のシナリオでユーザ機器において名目上推定される状態である。最後に、NCOの制御出力が記載されており、これらが信号処理のハードウェアを駆動する。これらの命令は、カルマンフィルタの状態パラメータの関数として計算される。DAGRに入る基準入力信号の電力を適切に制御することが、非常に重要である。電力が大き過ぎる場合は、基準入力信号がDAGRを故障させる。電力が小さ過ぎる場合は、信号を検出できず、システムは実益を失う。信号を制御するために取り入れられる方策を選んで、到来干渉レベルを追跡するが、更なるバックオフを受ける。これは、全体的な性能が到来干渉によって動かされることを保証している。動作中の更なる予防措置として、到来GPS信号の電力が基準信号の電力から確実に独立するように、到来GPS信号の電力を監視する。
【0052】
図4は、本発明の好ましい実施形態の原理を具体化する初期設定と動作制御の方法のフローチャートである。デバイスの起動時の第1のステップ100では、アドオンのユーザハードウェアが、基準信号をオフにする。次に、ステップ110では、到来干渉雑音を測定する。ステップ120では、到来雑音電力のベンチマークを得るために、測定した干渉雑音を記録する。到来雑音電力と、基準信号とを比較する。基準電力が到来干渉電力よりも優位に立っていることを、AGC機能が検出するまで、基準信号の電力をdBのステップでインクリメントして(ステップ140と150)、干渉を測定する(ステップ130)。この較正に基づいて、アドオンのGNSSユーザ機器は、命令された基準信号の電力と、AGCに入力された検出された電力との間におけるスケールファクタを計算して記録するステップ160を実行する。較正が完了すると、DAGRの信号プロセッサは、高い搬送波対雑音比を有する基準信号に簡単にアクセスできると考えられる。
【0053】
次のステップ170では、基準信号のロックを初期設定する。これを行うために、既存のGNSSユーザ機器のシリアルポートを通して往復メッセージを送ることによって、およその時間を得ることができる。発振器の可能性の高い周波数のずれに関する事前情報と、シリアルポートのメッセージとに基づいて、およその時間と周波数とのサーチウィンドウを導き出す。次に、DAGRの相関器のチャネルのうちの1本を、基準信号に割り振る。航法/通信プロセッサ21は、定められた周波数と時間とのサーチウィンドウを一斉に調べるように、そのチャネルに命令して、基準信号を捕捉して追跡する。
【0054】
基準信号の追跡時に、定常状態を得て、初期設定ステップ170が完了する。次に、ステップ180では、AGCで干渉を測定する。ステップ190では、公称の動作モードは、到来干渉レベルからおよそ30dBの基準信号に対してバックオフを設定する。
【0055】
判断の正しさの更なるチェックとして、航法/通信プロセッサ21は、GPSの統合の時定数と同等であって、場合によっては10秒よりも長い時定数で、ディザ電力レベルを基準信号に加えることができる。到来GPS信号の電力を推定する、図1に示されている実施形態の航法/通信プロセッサ21におけるカルマンフィルタは、各到来GPS信号の電力を名目上追跡する。追跡される信号の電力と基準電力とが、かなり相関している場合は、基準電力は大き過ぎるかもしれず、下方修正すべきである。
【0056】
本発明の好ましい実施形態の長所は、GPSのr.f.のタイミング及びレンジングの測定値と、イリジウムのr.f.のタイミング及びレンジングの測定値との両者に対して、特に、搬送波位相成分に対して、共通の精度の発振器の基準を提供することである。GPSのプラットフォームとイリジウムのプラットフォームとの両者に共通の安定した搬送波位相の基準は、上述の軍部におけるGPS到来信号の電力レベルに対するコヒーレント処理技術と、他の応用とのまだ利用されていない効果を明らかにする。特に、GPSとイリジウムのプラットフォームは、相互の19cmのLバンドの波長のほんの僅かの中で、良く安定しているはずである。この条件は、距離に関して0.5cm、又は時間に関して20psに変換される。特に、電子機器のバイアスが変動する場合は、これは厳しい精度レベルである。電子機器のバイアスは、温度又は機械的ストレスのような環境と共に変化する。カルマンフィルタを、限られた範囲のバイアス変動に対処するように設計できるが、そのような変動を超えると、実際の動作のシナリオでは、統合されたNav−Comの実際的な恩恵は、直ぐに失われる。その結果、ユーザ機器は動作できなくなる。
【0057】
図5は、一般性を失うことなく、緊密なチャネル間の位相のコヒーレンスを維持するように、既存のGPSユーザ機器と、新たなイリジウムトランシーバ能力とを統合した従来のアプローチを示している。このような統合に必要なデータポートに加えて、受信機78を物理的に変更して、GPSとイリジウムとの間で共有する共通のハードウェアの発振器79を加えることによって、共通の発振器が提供されている。示されているように、共通の発振器79をGPSのコード合成器80に接続し、更に、共通の発振器79を、追加のポート81を通して、イリジウムのコード合成器82に接続する。GPSのコード合成器80は、それぞれの信号入力に接続される。それぞれの信号入力は、共通のアンテナ83と、GPSのフィルタ84と、前置増幅器85と、ディジタイザ86とを含む。一方で、イリジウムのコード合成器は、共通のアンテナ83と、イリジウムのフィルタ87と、前置増幅器88と、ディジタイザ89とに接続される。
【0058】
次の分析は、この従来のアプローチのバイアスの感度をトレースしている。具体的には、1分以上の間隔に対して<<20psのレベルに安定性を保つという条件で、ノードDの安定性に対するノードBの安定性を評価する。この分析をするために、多くの詳細を無視する。詳細は、例えば、多くのGPS受信機が、r.f.のフロントエンドを有し、中間周波数にダウンコンバートするといったことである。しかしながら、一般性を失うことなく、この分析に対して、ベースバンドに直接にダウンコンバートすると想定する。図6に示されている好ましい実施形態の改善された安定性をサポートして、同様の結論に至ることを、更なる分析は示している。
【0059】
この分析は、BPSK信号を想定している。BPSK信号は、GPS波形のフォーマットである。イリジウムはQPSKを採用しているので、重ね合わせの原理によって、BPSKの分析をそのまま適用できる。ノード1における到来信号s1(t)は、次の式によって与えられる。
【数1】
【0060】
なお、d(t)は、データ変調であり、c(t)は、PRNのチップ化したシーケンスであり、ω0は、帯域中の公称の中心角周波数であり、φ(t)は、受信信号の到来搬送波位相である。信号は、信号経路A−BとA−Dを通って伝搬し、信号経路A−BとA−Dは、それぞれバイアスb21とb41とを加える。
【数2】
【0061】
発振器は、公称の位相出力を有する。公称の位相出力は、ノードCで測定される受信機のクロックタイムt3(t)であると想定する。
【数3】
【0062】
なお、τは、ノードCで測定される受信機の瞬間クロックバイアスである。共通の発振器は、2つのタップ、即ち、GPSの処理経路のためのタップと、インジウムの処理経路のためのタップとを使って、合成器を駆動する。ノードBとDとに配線された、関連する相互接続された電子機器と、各合成器とによって、経路バイアスb23とb43とが生じる。各ノードで測定される、結果として得られる受信機のクロックタイムは、次の式によって得られる。
【数4】
【0063】
次に、ノードBとDとにおいて、別々のA/Dコンバータによって、各信号をサンプリングする。受信機のクロックタイムの入力が複数のサンプリング期間Tに入るときに、各A/Dコンバータは信号をサンプリングする。ノードBの場合は、次の通りである。
【数5】
【0064】
ノードBにおいてサンプルkが得られる時間tA/D[k,2]について解くと、次の通りになる。
【数6】
【0065】
ノードBに対するサンプリング時間を、ノードBに対する受信信号の式に挿入すると、次の通りになる。
【数7】
【0066】
ノードDに対する同等の式は、次の通りである。
【数8】
【0067】
各チャネルに対するコードとデータは、ダウンストリームで消される。ここでは、変調とその処理の任意の位相の寄与を無視する。ノードCとノードDとの間における、任意のサンプルkに対する搬送波位相の差は、次のように、各信号に対する余弦偏角(cosine argument)間の差として直接的に得られる。
【数9】
【0068】
<〜8km/秒で移動するLEO衛星の場合に、ベースバンドにおけるタイムタグの誤差は十分に小さいと想定されるので、到来信号の位相φと、受信機のクロックバイアスτは、サンプル時間の基準の選択に関係ない。項ω0は、時間と位相角との間における単位変換のスケールファクタになり得る。瞬間的なr.f.のバイアスの振る舞いについての実質的な項をそのままにするように単純化すると、次の通りになる。
【数10】
【0069】
図5における従来のベンチマークの構成に対するこの結果は、密接に統合されたNav−Comを直ちにサポートしないことを示唆している。ハードウェアの変更を最低限にするならば、統合された全体的なデバイスに、2つ以上の別個の機械的ハウジングが必要である。多くの実用的な統合の場合に、ハウジングを空間的に分けて、ケーブルを介して各々を相互接続することが、必要である又は望ましい。上述のバイアス項の各々は、異なる温度感度の影響を受けるであろう。各ハウジングは、異なる温度で動作し得る。任意の所定の対のバイアス項を区別して消去すると、バランスがとれ得るが、特に、DAGRの既存のハウジングと電子機器とを変えないままにする場合に、このようなバランスをとるのが難しいことは簡単に分かる。
【0070】
例えば、項b23とその熱感度の特性は、DAGRの内部にあり、ユーザ機器の統合体の制御を受けない。片方の項b21は、異なるハードウェアのプラットフォームにまたがる場合もあり、又はまたがらない場合もあるが、それにも関わらず、異なる熱及び機械的環境の影響を受ける。従って、統合体が、ロバストで実用的なやり方で、項b23を区別して消去するのは困難である。同様に、項b41は、(例えば、外部アンテナを使用する場合に)DAGRの外部の同じ機械的ハウジングを共有する場合もあり、又は共有しない場合もあり、項b12を直ちに消去しない。項b12は、DAGRの中までハウジングを必ずまたぐはずである。最後に、項b41は、DAGRの外部の機械的ハウジングを共有する場合もあり、又は共有しない場合もあるが、それにも関わらず、項b43のバランスをとらなければならない。項b43は、異なるハウジングを必ずまたぐので、熱と、機械と、他の環境のストレスを受ける。
【0071】
全体的にとらえると、安定性を20psレベルに維持することを条件とすると、熱と機械のストレスを含む環境のストレスが、許容できないほどの逸脱を加える場合がある。既存のDAGRのハードウェアを物理的に変更しなければ、このような環境ストレスを簡単に制御又は軽減できないことが簡単に分かるであろう。残念なことに、このような物理的な変更をすると、密接に統合されたNav−Comのための実用的なアップグレードの経路を提供するという中心的な目的を達成できない。
【0072】
他方で、図6は、本発明を単純な形態で示している。図6は、図5と同じやり方で、環境的な位相の安定性を簡単に分析できる。既に記載したように、次の分析の目的は、DAGRのノードeとアドオンモジュールのノードdとの間における固有の安定性を評価することである。アドオンモジュールの受信機のクロックタイムは、アドオンモジュールのノードcで生成され、次の式によって与えられる。
【数11】
【0073】
更に、ノードdとeとにおける受信機のクロックタイムは、次のように与えられる。
【数12】
【0074】
新たなインターフェイスの基準信号r(t)を、GPSのPコードp(t)で変調する。Pコードは、アドオンモジュールによって生成され、次のようにノードeに伝達される。
【数13】
【0075】
任意の到来信号を追跡する前であっても、カルマンフィルタは、DAGRのクロックバイアスτDAGR(t)と、iGPSアドオンモジュールのクロックバイアスτ(t)の推定値の伝搬を開始する。基準信号の疑似距離の測定値は、信号対雑音比が大きく、基準信号の搬送波位相の精度にかなり重み付けをして、アドオンモジュールとGPS受信機との発振器を効果的に位相ロックさせると想定される。同じ信号のDAGRのレプリカは、次の式によって与えられる。
【数14】
【0076】
位相と遅延のロックの際にアドオンモジュールにおける航法/通信プロセッサによって指示される、DAGRの相関器によって測定される疑似距離の観測可能量ρ(t)は、次の式によって得られる。
【数15】
【0077】
起動時は、関連するモジュールのクロックバイアスのみを観測するが、受信機が衛星を追跡すると、実際のクロックバイアスを解くことができる。iGPSアドオン受信機、既存のGPS受信機、又は両者が、追跡を開始すると、位置と、時間と、適用可能な範囲までの、上述のテーブル1に記載された他の状態との推定を開始するのに十分な情報が、カルマンフィルタに利用可能になる。
【0078】
新たな方法に対する同じ分析アプローチを採用すると、ノードeで測定される信号は、次の式によって与えられる。
【数16】
【0079】
次に、ノードeで得られる総合的な信号は、到来信号s5(t)とr5(t)との和である。DAGR、或いは任意の他のGPS又はGNSSの受信機の内部の詳細は、一般に独占権の下にあるか又はさもなければ保護されているので、フロントエンドの単純化したモデルを想定する。ここでも、一般性を失うことなく、この分析のために、直接的なダウンコンバージョンを想定する。これは、他の特定のケースに容易に拡張できると想定される。サンプルレートTを有するNav−Comアドオンモジュールに対して、DAGRは、異なるサンプル間隔TDAGRを有すると想定する。既に記載したように、受信機のクロックタイムを考慮して、A/Dのサンプル時間を計算して、次に、実際の時間を考慮して、各測定値mを解く。
【数17】
【0080】
ノードeにおいて結果として得られるA/Dコンバータの出力は、次の通りである。
【数18】
【0081】
ノードdにおける信号とA/Dクロックを、上述と同じやり方で処理する。
【数19】
【0082】
2つの信号の位相を比較する前に、r.f.のサンプリングイベントのタイムタグ、特に、r.f.の位相の項、ω0mTDAGRとω0kTとを考慮に入れて、信号を処理することが極めて重要である。一般に、r.f.とベースバンドの項は両者共、持続期間、好ましくは、1分以上のオーダの時間に対して<<20psのサンプリングの安定性を有していなければならない。分析の便宜上、DAGRとNav−Comアドオンモジュールとの間におけるA/Dサンプルを対にして、これらがほぼ同時に現われるようにする。一般に、2つのクロックは非同期に実行されており、且つ2つの別々のサンプリングレートが想定されているので、プラットフォームの任意の所定のサンプルが、ちょうど同時に現われることは考えられない。
【0083】
次の展開は、任意の所定の相互のプラットフォームのサンプル間における経過時間の明示的な計算を提供する。最初に、各サンプルに対する受信機のクロックタイムは、次の通りであることを想起する。
【数20】
【0084】
次に、サンプル時間が互いに近い、即ち、1サンプル程度以内にあるように、マッチした対のA/Dサンプル、kmとmkを選択する。〜50MHzのサンプルクロックを想定した場合に、所定の対のサンプルは、互いに0.02μs内に通常現われる。任意の所定の対のサンプルに対して、受信機のクロックタイムにおけるサンプルエポック間の時間差は、δtLOによって、次のように与えられる。
【数21】
【0085】
受信機のクロックタイムに対する上述の関係を代わりに使うと、成分バイアスを考慮に入れた後に経過時間に適用する時間差は、次にように示される。
【数22】
【0086】
δtLOの期間内に、クロックバイアスはあまり変化しないと想定される。次のステップでは、サンプル時間と受信機のクロックタイムとの間における次の変換を代わりに使う。
【数23】
【0087】
その結果、次の式になる。
【数24】
【0088】
DAGRの各サンプルエポックで求められるプラットフォーム間の疑似距離に対する上述の式を代わりに使うと、次のようになる。
【数25】
【0089】
従って、δtLOに対する明示的な式は、次によって与えられる。
【数26】
【0090】
受信機は、右側のパラメータを全てリアルタイムで得られる。次に、Nav−Comアドオンモジュールからの時間軸と共通の時間軸に投影するのに必要な範囲まで、結果として得られる位相回転ω0δtLOを、DAGRの生の相関関係に適用することができる。
【0091】
GPSのPコードとYコードとのセットが事実上直交しているのは周知である。この感度を分析するために、(i)信号r5の位相から独立して、信号s5の位相を追跡でき、(ii)コードとデータとを消すことによる任意の位相のバイアスの寄与を無視できると想定される。ノードeにおいて基準位相に対する到来信号の位相を計算すると、次の式が得られる。
【数27】
【0092】
DAGRの相関器によって測定される基準信号の既知の疑似距離に対する上述の式を代わりに使って、DAGRのクロックバイアスに対する基準を削除する。更に、δtLOに対する上述の式を代わりに使う。図5に対する分析におけるように、衛星の搬送波位相φと、関連するクロックバイアスτのベースバンド値は、選ばれたサンプリングエポックにわたって事実上一定を維持すると想定される。位相の安定性に対する全体的に20psの条件と比較して、ベースバンドのタイムタグに対する公差は比較的に緩い。ユーザに対するLEO衛星の速度が8km/秒を超えず、更に、ユーザ機器の発振器の周波数誤差が、この速度(Lバンドで40kHzよりも相当に低いものと同等である)によって制限されると想定すると、0.1μsのタイムタグの正確さは、位相の誤差を波長の僅かな部分に制限するのに十分である。単純化すると、最終的な結果は、次の式によって与えられる。
【数28】
【0093】
これは、前の分析の式と同じである。しかしながら、ここに説明されている方法を適用し、且つ図6を参照することによって、上述のr.f.バイアスの4つは全て、アドオンユニットの設計者によって完全に制御されることが簡単に分かるであろう。何れにしても、バイアスは、DAGRのバイアス特性に最早左右されない。この分析により、この設計は、統合に関連する環境から独立している。2本のr.f.経路に沿ってコンポーネントを対にするか、又は2本のクロック経路に沿ってコンポーネントを対にして、区別して消去するといった、実用的な技術を、設計者は自由に用いる。更に、1チップの同じ回路カード又は基板上に、バイアス感知コンポーネントを全て配置できるので、設計者は、熱、機械、又は任意の他の環境ストレスを確実に最小化する又はバランスをとる実用的な手段が得られる。
【0094】
全体的に判断して、本発明は、ハードウェアを変更せずに、在庫のDAGRを、兵站部レベルでアップグレードすることを可能にしている。DAGRにおいてソフトウェアのみを変更するので、DAGRが独立形式である場合に、これは当初の目的にとって有益である。従って、ソフトウェアを修正するこのようなDAGRは、ロジスティクス、動作、又はメンテナンスに対して実際的な影響を及ぼさない。
【0095】
更に、密接に統合されたアップグレードユニットと、組み込まれたグローバルな通信リンクとの組み合わせは、ロジスティクスに対する一定の恩恵を可能にする。ソフトウェアは、iGPSアドオンコンポーネントのフラッシュメモリに配置され得る。DAGRの再プログラミングは、シリアルポートを介して既に行なわれており、iGPSアドオンコンポーネントはこのシリアルポートに接続する必要がある。再プログラミングスイッチを使用して、iGPSアドオンコンポーネントを再プログラミングモードに切り換えてもよく、標準のDAGRの再プログラミングを使用してもよい。別のアプローチでは、イリジウム介して、新たなDAGRのソフトウェアのロードを送る。
【0096】
ここに記載されている標準的なインターフェイスを使用して、DAGRをアップグレードすると、密接に統合されたグローバルなNav−Comの能力を有するiGPSのユーザ機器になる。本発明は既存のDAGRの実用的なアップグレードを可能にするので、イリジウムの配置の残りの寿命中に、軍部がiGPSの恩恵を受けるならば、新たな軍用のGPS受信機を生産する必要はない。従って、iGPSを実用化して配備とテストをすることによって、本発明は、iGPS自体のデモンストレーションを容易にする。更に、統合されたNav−Comの能力を備えたLEO及びMEOの航法衛星のハイブリッドの配置としてのiGPSである、本発明は、より高度な将来のグローバルな統合されたNav−Comを開発する存在証明を提供するのを助ける。
【0097】
当業者が本発明を作成及び使用できるほど十分に詳しく、本発明の好ましい実施形態を記載したが、それにも関わらず、本発明の意図から逸脱することなく、例示された実施形態の多数のバリエーションと変更を作成できることが分かるであろう。例えば、ここに記載されている方法が当業者によって理解されると、iGPS及び地域ネットワークと、他のLEO及びGNSS全地球航法通信の応用とを含むユーザ機器と一群の実施形態とを包含するように、簡単に拡張できる。従って、本発明は、上述の説明又は添付の図面によって制限されることを意図されておらず、請求項のみに従って定められる。
【符号の説明】
【0098】
1・・・DAGR、2・・・アドオン拡張モジュール、3・・・双方向のシリアルポート、4・・・外部アンテナの入力、5、83・・・共通のアンテナ、6、7・・・帯域フィルタ、8、9・・・前置増幅器、10・・・発振器、11・・・合成器、12・・・A/Dコンバータ、13・・・ヒルベルト変換処理機能又は回路、16・・・ヒルベルト逆変換処理機能又は回路、14・・・信号プロセッサのバンク、17・・・D/Aコンバータ、18・・・可変減衰器、19・・・増幅器、20・・・変調器、21・・・中央の航法/通信プロセッサ、22・・・GPSのPコード生成器、23・・・構成制御、24・・・慣性計測ユニット、25・・・数値制御発振器、26・・・イリジウムのコード生成器、30・・・可変減衰器、31・・・自動利得制御、40・・・GPS衛星、41・・・イリジウム衛星、42・・・基準局、43・・・アンテナ、79・・・共通の発振器、80・・・GPSのコード合成器、81・・・追加のポート、82・・・イリジウムのコード合成器、84、87・・・フィルタ、85、88・・・前置増幅器、86、89・・・ディジタイザ。
【技術分野】
【0001】
本発明は、海軍研究試験所(Naval Research Laboratory)によって与えられた海軍省の契約N00173−08−C−2074のもとで政府の支援を受けて作成された。政府は、本発明における一定の権利を有する。
【0002】
本発明は、既存の全地球航法衛星システム(global navigation satellite system, GNSS)ユーザ機器を修正する必要なく、高性能の密接に統合された航法と通信(navigation and communication, Nav-Com)の能力を追加するために、既存のGNSSユーザ機器をアップグレードする方法に関する。既存のGNSSユーザ機器は、例えばGPS受信機である。更に、本発明は、iGPSを既存のGNSSユーザ機器に追加する装置に関する。この装置は、差し込み式の拡張モジュールの形式をとり得る。
【0003】
本発明の好ましい実施形態では、iGPSとして知られている、特定の密接に統合されたNav−Comシステムにアップグレードする。iGPSは、低地球軌道(Low Earth Orbiting, LEO)衛星から受信した信号の搬送波位相を利用して、専用の広帯域の基準信号を提供する。LEO衛星は、例えばイリジウムである。この実施形態では、iGPSへのアップグレードは、以下によって達成される。
【0004】
・装置の基準発振器にロックされた専用の広帯域の基準信号の位相を、GNSSユーザ機器における既存のアンテナポートを使用してGNSSユーザ機器に供給する。
【0005】
・到来GNSS(又はGPS)信号と、既存のGNSSユーザ機器の基準発振器に対する基準信号とのコヒーレントな相関関係を、既存のGNSSユーザ機器に生成させる。
【0006】
・コヒーレントな相関関係を既存のデータポートを通してNaV−Comプロセッサに送り返して、装置の基準発振器とイリジウムとの更なる相関関係と組み合わせて、位置、速度、及び/又は時間に対するより精密な解を導き出す。
【0007】
GNSSユーザ機器は、防衛高度GPS受信機(Defense advanced GPS Receiver, DAGR)であり得る。NaV−Comプロセッサと、専用の基準信号生成コンポーネントは、単一の一体型モジュールに設けられている。DAGRを修正する必要なしに、このモジュールをDAGRの既存のポートのプラグに差し込む。この構成は、搬送波位相を使用して、DAGRにおける位置、航法、及びタイミング(Position, Navigation, and Timing, PNT)の、正確さ(accuracy)、完全性(integrity)、及び利用可能性(availability)を、かなり、場合によっては数千倍に改善でき、地球上のどこでも、1分のオーダの時間フレームで、デシメートルレベル以下の位置決定に収束する可能性を有する。本発明は、高精度のGNSSの搬送波位相の観測可能量をより簡単に利用して、干渉のある状態又は妨害を受けた環境のもとであっても、PNTの利用可能性を改善することを可能にする。更に、本発明は、精密に結合された航法と通信のモードを合成することによって、新たな通信の拡張が得られるようにする。適切な設計と統合化とを用いて、アップグレードを取り付け易くすると、高度な能力を得るための配備とライフサイクルのコストとをかなり下げることができる。
【背景技術】
【0008】
特に、このようなインフラストラクチャが本質的にグローバルであるならば、密接に統合された航法と通信は、米国の軍用、民生用、及び商用の用途に対して、広範囲の新たな補足的な能力をもたらす。通信のインフラストラクチャが、リアルタイムのデータとタイミングとを補助することによって、航法を改善でき、一方で、航法のインフラストラクチャが、時間と位置とを補助することによって、通信を改善する。グローバルなインフラストラクチャを用いると、出資者は、規模と範囲の経済性をより良く享受できる。航法と通信のコンポーネントのアーキテクチャをより密接に統合すると、より大きな相互の相乗効果を得ることができる。
【0009】
統合されたグローバルなNav−Comシステムの特に注目すべき1つの例は、iGPSである。iGPSは、イリジウムとGPSとのグローバルな衛星の配置を融合することによって作られた。海軍省は、イリジウムを使用する契約を、ボーイングが主導するチーム(Boeing led team)に与えて、補助的なデータ、タイミング、及びレンジングの情報を、認可されたGPSユーザに提供した。この追加情報は複数の恩恵を与え、特に、干渉を阻止する性能をかなり改善して、GPSが動的なユーザプラットフォームをより高速に捕捉する手段を与えた[グレンギボンズ、「ボーイングはNRL契約を勝ち取って、イリジウム/GPSの開発を継続する」、インサイドGNSS、2008年9/10月(Glen Gibbons, "Boeing Wins NRL Contract to Continue Iridium/GPS Development", Inside GNSS, September/October 2008)]。
【0010】
一般に、iGPSと、より広域のグローバルなNav−Comの解集合とによって、位置、航法、及びタイミング(PNT)の、正確さ、完全性、及び利用可能性が、かなり改善され得る。従来はGPS衛星が高軌道をゆっくりと移動していた。これに対して、空中のLEO衛星の高速の角運動は、空間ダイバーシティを大幅に高めた。LEOとGPSの衛星の搬送波位相を用いると、地球上のどこでも、1分のオーダの時間フレームで、デシメートルレベル以下の位置決定を自動追跡できる。例えば、米国特許6,373,432と、5,812,961と、5,944,770を参照すべきである。
【0011】
搬送波位相の使用は、かなりの恩恵をユーザに与える。GPSのL1波長は、およそ19cmである。GPSの固有の精度は、この波長よりもはるかに低い。GPSのL1に対する、タイミング及びレンジングの一般的な誤差量は、0.5cmのオーダのRMS、又は時間に関して20psになる。この精度が、上述の全体的な位置決めの正確さと、完全性と、干渉の阻止とを達成する鍵である。米国特許7,372,400に記載されているように、iGPSのインフラストラクチャを使用して、(イリジウムの天体暦(ephemeris)とGPSのデータの削除とに対して)データを補助して、且つ(基準局でイリジウムのクロックを較正して、精密なイリジウムの搬送波位相の補正をユーザにリアルタイムで放送して)時間の安定性について送信することができる。
【0012】
逆も真である。ユーザの位置と時間とが十分に分かると、改善された通信に関連する新たな能力が可能になる。例えば、ユーザは各々の位置とタイミングとが十分に分かるので、ユーザと衛星との間において、極めて安定した仮想のクロックに基づいて搬送波を設定できる。これは、ロバストでコヒーレントな通信リンクを設定して、例えば、耐干渉性と低い通信遮断率とをサポートすることを可能にする。
【0013】
搬送波位相は、従来は航法の目的で軍部によって利用されていなかった。その代わりに、信号を二乗する技術が用いられていた。これは、信号と雑音との両者を二乗する望ましくない結果を有する。このため、不足を補うより高電力の衛星を開発して打ち上げることについて軍部が検討する時に、GPSの信号電力を無駄にした。iGPSのインフラストラクチャは、既存のGPSの電力をより効率的に使用できる。
【0014】
グローバルな統合されたNav−Comの更なる恩恵は、更なる相乗効果から得られる。GPSのユーザ機器と他のデバイスとを用いると、暗号鍵を安全に配布する必要があることが多い。適切なインフラストラクチャがなければ、プロセスが煩雑になり得る。例えば、一方向のみのデータリンクを用いると、ユーザとデバイスは、鍵の管理機関を認証できない場合がある。ロバストでグローバルな双方向の通信システムは、ユーザとデバイスが世界のどこにいても、鍵を取り換える各要求を、ユーザとデバイスが認証できるようにすることによって、この問題を解決する。この使い易さによって、鍵の配布を安全で且つたやすくすることができる。
【0015】
iGPSの場合に、米国は、GPSに対するLEOベースの拡張の存在を直ぐに証明する機会がある。イリジウム衛星は、既に軌道上にあり、有効期間を2014年以降に延長することが計画されている(「イリジウム衛星LLCは配置の寿命を当初の予測よりもかなり延ばすと推定」、イリジウム衛星LLCの報道発表、2003年2月26日(Iridium Satellite LLC Estimates Constellation Life Span To Extend Well Beyond Original Predictions," Iridium Satellite LLC Press Release, February 26, 2003)を参照すべきである)。上述の海軍省の契約のもとで、ボーイングチームは、グローバルな地上のインフラストラクチャを開発して、既存のイリジウム衛星の配置に対する新たなフライトソフトウェアを2011年の始めまでに開発するであろう。このタイムテーブルでは、イリジウムの配置がその耐用年数を過ぎて劣化する前に、米軍と他の認可されたユーザとが新たな能力を効率的に利用するための適切な信号を空間中に数年間提供するであろう。
【0016】
しかしながら、iGPSの実施に対する重大な障害は、ユーザ機器に装備を施す労力とコストである。ユーザ機器は、例えば防衛高度GPS受信機(DAGR)であり、軍部が選んだユーザ機器のままである。現在、米軍は、数十万個のGPSユニットを配備している(「ロックウェルコリンズは200,000個目のDAGRと40,000個目のGPSエンジンを米国の陸軍に引き渡した」、ロックウェルコリンズの報道発表、2008年4月18日(Rockwell Collins delivers 200,000th DAGR and 40,000th GPS engine to the U.S. Army", Rockwell Collins Press Release, April 18, 2008))。更により多くのものが、既に調達過程にある。米国政府は、1ユニット当たりだいたい2000ドルで、これらのユニットを購入した。
【0017】
軍部又は他のユーザがiGPSを採用する場合に、必要とされるのは、ユーザ機器のインストール済みのベースを利用する簡単なやり方である。先行技術では、受け入れ難い2つのアプローチを以前に提示した。即ち、(i)密接に統合できる新たな精密なiGPSのインターフェイスを受け入れるために、既存のユーザ機器のハードウェアを修正することと、(ii)既存のユーザ機器を、最初から設計された新たな密接に統合されたiGPSのユーザ機器に完全に交換することである。
【0018】
第1のアプローチは、密接に統合された精密なiGPSのインターフェイスを取り入れることに伴う経済的及び技術的なリスクがあるので、かなり懸念される。特に、DAGRは、外部発振器の入力を備えていないので、これを加えなければならない。この移行に幾らかかり、DAGRのコンポーネントの交換がどの程度まで必要になるかは、不明である。更に、関連するロジスティックスと構成との統制の問題がある。即ち、複数のバージョンのDAGRのハードウェアがあるために、ユーザとリーダーシップとに対する管理が煩雑になる。その理由は、ハードウェアを修正すると、全規格のうちの多くを変更して管理することが必要になるからである。更に、ハードウェアの修正に伴う技術的なリスクがある。全範囲の環境条件において、GPSの信号処理コンポーネントとイリジウムの信号処理コンポーネントとの間に20psの安定性があることが、密接に統合したiGPSの搬送波位相の精度に必要である。位相の変動の影響を特に受け易いハードウェアコンポーネントは、GPSのRFのフロントエンドと、イリジウムのRFのフロントエンドと、GPSの発振器とを含む。航法処理アルゴリズムは、2つのコンポーネント間における搬送波位相のバイアスの緩やかなドリフトを許容できるが、熱又は機械的な乱れが極端である場合は、システムは有益な性能を提供できない。異なる熱及び機械的ストレスの影響を受ける異なる筐体の中に、イリジウムのコンポーネントとGPSのコンポーネントとを入れる必要があるので、DAGRのレイアウトが技術的なリスクを高める。
【0019】
更に、第2のアプローチは、抵抗に遭う。米国がGPS機器に既にかなり投資していることを考慮すると、既存の在庫品の撤去を正当化するのは難しい。
【0020】
LEOを拡張したGPS Nav−Comシステムの広範囲にわたる恩恵を、潜在的な米国の軍隊と、民間と、市場の出資者に明示する手段が必要である。この目的のために、GPSの既存のユーザのユーザ機器をアップグレードする実用的で魅力的な方法である、イリジウムとGPSとを統合することによって形成されるiGPSの形態の存在証明をする必要がある。従って、言い換えると、既存のDAGRに対する、密接に統合したグローバルなNav−Comのアップグレードを生成する実用的な方法であって、任意のハードウェアの修正を必要とせずに、十分に必要な精度と性能とを提供する方法が必要である。
【発明の概要】
【0021】
従って、本発明の目的は、密接に統合されたNav−Comの能力でGNSSユーザ機器をアップグレードする方法を提供することである。
【0022】
本発明の第2の目的は、既存のユーザ機器に遡及的に適用できる、密接に統合されたNav−Comの能力で既存のGNSSユーザ機器をアップグレードする実用的な方法を提供することである。
【0023】
本発明の第3の目的は、既存のユーザ機器に遡及的に適用できるGNSSユーザ機器のためのユーザハードウェアを提供することである。
【0024】
従って、本発明は、元のGPS機器のハードウェアを修正する必要なく、航法の性能を拡張するために、GPSのユーザ機器をアップグレードして、他のGNSSシステムに密接に統合する方法を提供することである。この方法は、密接に統合されたNav−Comのユーザ機器の重大なr.f.コンポーネント間の不都合な差分位相のバイアスのドリフトを制限する、実用的でコスト効率の良い手段を提供する。好ましい実施形態では、性能をアップグレードしたものは、密接に統合されたグローバルなNav−Comの能力を可能にして、iGPS及び任意の他のGNSSシステムと互換性を有する。
【0025】
本発明の好ましい実施形態の原理によると、本発明の目的は、既存の全地球航法衛星システム(GNSS)ユーザ機器をアップグレードする方法であって、第1のGNSSユーザハードウェアを提供するステップと、前記第1のGNSSユーザハードウェアと分かれている、既存の第2のGNSSユーザデバイスを提供するステップと、前記第2のGNSSユーザデバイスのハードウェアを修正することなく、前記第1のGNSSユーザハードウェアを、既存のポートを介して、前記第2のGNSSユーザデバイスに接続するステップと、を含み、前記第1のGNSSユーザハードウェアは、第1の発振器と、航法/通信プロセッサと、を含み、前記第1の発振器は、精密なコード化された基準信号の生成器を駆動し、前記精密な符号化された基準信号の生成器は、基準信号を生成して、前記基準信号を既存の第2のGNSSユーザデバイスに供給するように構成されており、前記航法/通信プロセッサは、到来GNSS信号と前記基準信号とのコヒーレントな相関関係について、前記第2のGNSSユーザデバイスから受信すると、位置、航法、及び/又はタイミングの信号を生成するように構成されており、前記第2のGNSSユーザデバイスは、少なくとも1つの既存のポートと、第2の発振器と、を含み、前記第2の発振器は、到来GNSS信号と、アドオンの前記第1のGNSSユーザハードウェアによって生成された前記基準信号との前記コヒーレントな相関関係を生成して、前記コヒーレントな相関関係を前記第1のGNSSユーザハードウェアに送るように構成されている、方法によって達成される。
【0026】
更に、本発明の目的は、上述の方法の第1のGNSSユーザハードウェアに対応するアップグレードのハードウェアによって達成される。アップグレードのハードウェアは、安定した基準信号を生成して、安定した基準信号を第2のGNSSユーザデバイスに供給して、第2のGNSSデバイスからのコヒーレントな相関関係と、それ自身の生の精密な相関関係とを組み合わせて、位置、速度、及び/又は時間に対する改善された解を導き出すように構成されている。
【0027】
本発明の方法と装置の両者の実施形態では、少なくとも1つの既存のポートを使用して、第1のGNSSユーザハードウェアを既存の第2のGNSSユーザデバイスに結合し、少なくとも1つの既存のポートは、アンテナポートとデータポートとを含み、第1のGNSSユーザハードウェアは、基準信号を、アンテナポートを通して、第2のGNSSユーザデバイスに送るように構成されており、第1のGNSSユーザハードウェアは、指示命令を第2のGNSSユーザデバイスに送って、コヒーレントな相関関係を、データポートを通して受信するように構成されている。
【0028】
本発明の好ましい実施形態の更に別の態様によると、第1のGNSSユーザハードウェアは、イリジウム受信能力を含み、第2のGNSSユーザデバイスは、全地球測位システム(GPS)の受信機であり、イリジウムの信号とGPSの信号は、共通のアンテナを通して入力されるのが好ましい。この実施形態では、第1の発振器は、GPSのr.f.のタイミング及びレンジングの測定値と、イリジウムのr.f.のタイミング及びレンジングの測定値との両者に対する、共通の精密な発振器の搬送波位相の基準を提供する。更に、第1のGNSSユーザハードウェアは、イリジウム送信能力を含み、一方で、第1又は第2のGNSSユーザ受信機は、Yコード、Mコード、C/Aコード、ガリレオ(Galileo)、グロナス(GLONASS)、及び/又はコンパス(COMPASS)の能力を含み得る。基準局は、視界内の衛星のコードと搬送波とを較正して、較正データを通信衛星にテレメータで送信する。通信衛星の放送された出力は、第1のGNSSユーザハードウェアに接続され、通信衛星の較正データを用いて、位置、速度、及び時間の解を改善する。
【0029】
本発明の好ましい実施形態で使用されている航法/通信プロセッサは、到来信号の搬送波位相を使用して、ユーザ機器の位置、速度、及び時間をモデル化して推定するために、カルマンフィルタを含み得る。カルマンフィルタは、慣性計測ユニット(inertial measurement unit, IMU)からの観測可能なデータを任意に利用し得る。
【0030】
更に、第1のGNSSユーザハードウェアは、送信機コンポーネントを含み得る。送信機コンポーネントは、その改善された位置、速度、及び時間の推定値を使用して、その送信の時間と周波数の同期化を改善する。送信は、地域通信ネットワーク、衛星ネットワーク、又は低地球軌道衛星のグローバルネットワークに接続される。
【図面の簡単な説明】
【0031】
【図1】本発明の好ましい実施形態の原理に従って構築された、既存のGNSSユーザ機器と拡張モジュールとを含む、アップグレードされたGNSSシステムの概略図である。
【図2】図1のシステムのブロック図である。
【図3】図1のシステムによって使用される、タイミング、レンジング、及びデータの信号を示す概略図である。
【図4】好ましい方法に従って、基準入力を初期設定して制御するサブルーチンのフローチャートである。
【図5】位相のバイアスのドリフトの感度のベンチマークを示す概略図である。
【図6】好ましい方法の位相のバイアスのドリフトの感度を示す概略図である。
【発明を実施するための形態】
【0032】
図1と2は、アップグレードされたGNSSシステムを示す最重要の機能図である。アップグレードされたGNSSシステムは、防衛高度GPS受信機(DAGR)1として示されている既存のGNSSユーザ機器と、本発明の好ましい実施形態の原理に従って構築された拡張されたユーザハードウェアとを含んでいる。拡張されたユーザハードウェアは、図2に示されている別個のアドオン拡張モジュール2の形式を任意にとり得る。拡張されたユーザハードウェアは、ユーザ機器に対する既存のインターフェイスに差し込むように構成されている。例示的なDAGRにおけるユーザ機器は、双方向のシリアルポート3と、外部アンテナの入力4とを含んでいる。
【0033】
示されているユーザハードウェアと方法とを、DAGR以外のGNSSユーザ機器に適合させる又は修正することも、本発明の範囲内であることが、当業者に分かるであろう。更に、本発明では、密接に統合されたNav−Comの能力を実施するために既存のGNSSのハードウェアを修正する必要はないが、それにも関わらず、他の理由で、このようなハードウェアを修正してもよいことが、当業者に分かるであろう。更に、既存のGNSSのハードウェアを修正しなくても、(例えば、図6に関連して後述されるように)向上したPNTデータの入力に適応させるために、既存のGNSSユーザ機器のソフトウェアを修正することが必要な場合がある。DAGRの場合に、兵站部(depot)レベルで又は潜在的には戦地でさえも、ソフトウェアをアップグレードできる。一般に、ユーザ機器の製造業者と協力して、従来のGNSSユーザ機器に備えられているソフトウェアを簡単に変更して、より高精度の入力に適応させ、既存の機器を容易に改造して、アップグレードに適応させることができる。
【0034】
ユーザ機器の具体的なパッケージングは多くの形態をとり得るが、図2は好ましい実施形態を示しており、Nav−Comの拡張電子機器は別個のアドオンモジュール2に収容されている。別個のアドオンモジュール2は、既存のDAGRにインターフェイスで接続する。既に記載したように、本発明の1つの目的は、既存のDAGRのハードウェアのインターフェイスを維持して、アップグレードをできるだけ容易にすることである。従って、修正されていないDAGRの様々な寄せ集めを有する全てのDAGRの在庫に対する構成制御を維持することは、実際に役立つであろう。
【0035】
図1と2に示されているように、共通のアンテナ5は、GPSのL1及びL2の受信信号と、イリジウムのLバンドの送信及び受信信号とに使用される。それにも関わらず、特に、イリジウム以外のLEO衛星が使用される場合、又は汎用市販(commercial off the shelf, COTS)のデュアルバンドのGPSのアクティブアンテナが使用される場合は、複数のアンテナを備えてもよいことが分かるであろう。各入力は、GPS又はイリジウムの該当する帯域に対するそれぞれのブロック6、7によって帯域フィルタにかけられて、次に、それぞれの前置増幅器8、9に供給される。
【0036】
発振器10は、トランシーバに対する共通の時間軸の役割をするのが好ましい。本発明の目的は、この発振器10に対するコストを含むコンポーネントのコストを最低限に維持することであるので、低コストの圧電結晶発振器が示されているが、類似の又はより良い性能を備えた1つ以上の他の発振器を代わりに使ってもよいのは当然である。発振器10は、合成器11を駆動する。これは、必要なA/Dと、D/Aと、局部発振器の信号を全てユニットに提供する。
【0037】
イリジウムの入力は、A/Dコンバータ12によってディジタル化されて、次に、ヒルベルト変換処理機能又は回路13に供給される。ヒルベルト変換処理機能又は回路13は、到来信号の複素数表現を、信号プロセッサのバンク14に提供する。同じやり方で、信号プロセッサのバンク14の複素数のディジタル化されたイリジウムの出力を組み合わせて、信号プロセッサのバンク14から、ヒルベルト逆変換処理関数又は回路16にルーティングして、D/Aコンバータ17によってD/A変換して、可変減衰器18によって電力をスケーリングして、増幅器19によって増幅して、その後で、変調器20に供給して、アンテナ5を通して送信する。
【0038】
例えば、2005年2月11日のUS WP 7D/14R2から入手可能な「イリジウム衛星システムのサービスリンクの特徴に関する作業文書(Working Document on Service Link Characteristics of the Iridium Satellite System)」という名称の刊行物に記載されているように、周波数及び時分割多重アクセス方式に従って、イリジウムの送信及び受信機能を切り替えてもよい。この中に記載されているように、各90msの反復フレームは、1つの20.32msのダウンリンクのページングスロットと、各8.28msの4つのデュプレックスのアップリンクとダウンリンクとのテレフォニスロットとに分割される。統合されたユニットのイリジウム部分は、イリジウムとGPSとの両者を同時に受信できる。イリジウムのユーザ機器が送信しているときに、GPSは、帯域外干渉の影響を受け易い傾向があるので、GPSの入力に対して送信のブランキングを実施する。イリジウムの1つのみの時間スロットがアップリンクに使用される場合に、GPSの休止時間に対する8.28ms/90msのデューティサイクルは、許容可能な〜0.1dBの損失に相当する。
【0039】
中央の航法/通信プロセッサ21は、ユーザ機器の内部の動作を指示する。中央の航法/通信プロセッサ21は、信号プロセッサのバンク14によって実施される複数のイリジウム相関器に対する制御ループドライバと、GPSのPコード生成器22(単に説明の目的で、プロセッサ21の外部に示されている)と、送信及び受信機機能に対する構成制御23と、オプションの微小電気機械システム(micro-electromechanical system, MEMS)の慣性計測ユニット(IMU)24とDAGRとに対するインターフェイスとを含む。更に、プロセッサ21は、カルマンフィルタの形式で、ユーザ機器の主要な推定能力を提供する。これは、利用可能な情報を最適に組み合わせる。利用可能な情報は、イリジウムと、GPSと、IMU又は他のセンサ、例えば気圧計又は磁力計とからの情報を含む。
【0040】
統合されたNav−Comの全ての恩恵を確保するために、イリジウムの信号処理ブロック14は、到来受信信号の相関をとって、コヒーレント検波をする手段を提供する。ドライバ追跡ループは、信号プロセッサ14の中の数値制御発振器(numerically controlled oscillator, NCO)25に命令する。イリジウムのコード生成器26は、レプリカコードを合成する。レプリカコードは、各イリジウム衛星が放送すると分かっているものと一致する。イリジウムは、元々航法システムとなるように設計されておらず、イリジウムの場合は、スペクトラム拡散信号の直接シーケンスのチップを生成するために、ユーザに前もって分かっている予め特定された一連のメッセージビットで構成されるように、このレプリカコードを選択する。このアーキテクチャでは、到来イリジウム信号のタイミング(コード)と搬送波位相とを精密に決定できる。同じアーキテクチャを送信側に使用すると、出力のタイミング(コード)と搬送波位相とを精密に確実に制御できる。
【0041】
更に、合成器は、GPSのL1バンドの1575.42MHzにおける正弦波の局部発振器と、10.23MHzにおけるスクエアコードドライバクロックとを生成する。これらのクロックは、Pコード生成器22に供給される。Pコード生成器22は、ゼロのドップラで基準の受信機のクロックタイムのPコード信号を生成する。航法/通信プロセッサ21は、Pコード生成器22の開始時間を命令された値に初期設定できる。航法/通信プロセッサのGPS信号電力推定値によって補われた到来干渉電力推定値に基づいて、プロセッサ21は、可変減衰器30を積極的に制御して、Pコードの基準信号が、干渉を受けても検出されるほど十分に強いが、望ましくない干渉源になるほど強くないことを保証する。一連の自動利得制御(Automatic Gain Control, AGC)31は、航法/通信プロセッサ21によって監視される。AGC31は、到来した複合のGPS及び基準信号を、DAGR1にルーティングする。従って、プロセッサ21は、アンテナ端子から出てきた全ての電力を追跡して、DAGR又は既存のGPS受信機のハードウェアに結びつけられた一定の値に、電力を調整できる。DAGR又は既存のGPS受信機のハードウェアは、AGC及び/又はSFAP、或いはSTAPタイプの信号処理を行なう場合もあり、又は行なわない場合もある。更に、AGC及び/又はSFAP、或いはSTAPタイプの信号処理は、既存のポートを介して制御され統合され得る。基準信号電力の積極的な制御については、後述でより詳しく説明する。
【0042】
GPSのPコードを生成するのに、暗号化能力又は認証は必要ない。従って、DAGRのための拡張ハードウェア又はモジュールは、選択利用可能性のアンチスプーフィングモジュール(Selective Availability Anti-Spoofing Module, SAASM)のもとで制御されるものである必要はなく、従って、既存のDAGRとインターフェイスで接続するのに非常に実用的で容易であり得ることが分かるであろう。対象のGPS受信機が、市販のC/Aコード受信機である場合は、C/Aコードも使用できる。しかしながら、Pコードは相互相関性が極めて小さいので、できればPコードが好ましい。
【0043】
図1に示されているDAGR1は、12本のGPS追跡チャネルを含んでいる。12本のGPS追跡チャネルの各々は、軍用のSAASM暗号化アーキテクチャ内で動作できる。SAASMアーキテクチャは、C/Aコード(1.023MHzの粗い/捕捉信号)、Pコード(10.23MHzの精密信号)、又はYコード(10.23MHzの暗号化信号)を用いる任意の所定の衛星の動作を可能にする。航法/通信プロセッサ21は、シリアルポート3を介して、DAGR1と通信する。シリアルポート3によって、プロセッサ21は、SAASMチャネルごとに、コード及び搬送波の数値制御発振器(NCO)に個々に命令して、生の同相及び直角位相(I及びQ)のGPSの相関関係を返すことができる。
【0044】
好ましい実施形態では、GPS受信機を使用する任意の既存の統合化において、ケーブルを変更することなく、既存のGPS受信機の既存の1パルス/秒(Pulse Per Second, PPS)のインターフェイスをそのまま使用できる。GPSが利用可能でない場合に、アドオンモジュールにおけるイリジウム又は他のGNSSの受信能力は、既存のインターフェイスを介して1PPSを正確に駆動し続けることができる。
【0045】
図3は、図1と2に示されているグローバルなシステムのためのユーザ機器に関連する、衛星と基準局との構成を示している。ユーザ機器1、2、5の視野に、GPS衛星40とイリジウム衛星41の各々が1つ以上あり得る。世界中に設置されている基準局42は、視野の中の各衛星のクロックと天体暦とを較正する役割をする。各基準局42は、アンテナ43と信号処理部(示されない)とを組み込んでいる。この信号処理部と、ユーザ機器の信号処理部は、機能的に同等であるが、この信号処理部は、制御された環境で動作し、任意にラックマウントに集められ得る。
【0046】
例示的な実施形態では、GPSとイリジウムの衛星40、41の各々は、能力が必要とされる地球上のどこかにあるユーザ機器1、2、5と基準局42との両者の共通の視野を共有している。各衛星は、搬送波上に変調されたPRNレンジングコードを放送する。イリジウムは、航法衛星であるようにも、PRNレンジングコードを放送するようにも設計されていないので、1本以上の予め定められたデータビットストリームを使用して、同等の複製を合成する。基準局42は、衛星のクロックをリアルタイムで較正する役割をする。各基準局は、視界中の全ての衛星のコードと搬送波位相とを測定して、この情報をイリジウムのデータリンクを介してユーザにテレメータで送信する。ユーザ機器1、2、5は、視界中の各衛星40、41のコードと搬送波とを追跡して、更に、コードと搬送波位相との測定値を自身で生成して、基準局のデータに読み込む。更に、イリジウムは逆方向のデータ経路を提供しており、ユーザ機器1、2、5が、データを、この場合は中継のために基準局42に戻して、衛星にアップリンクできるようにしている。
【0047】
好ましいシステムのダウンリンク及びアップリンクのタイミング及びレンジングの機能は、タイミング及びレンジングの信号の搬送波位相に対して、センチメートルレベルの精度で実行される、即ち小さな変動を維持するのが好ましい。このような精度によって、低地球軌道(LEO)衛星の高速の角運動は、独立型GPSよりも正確さと完全性とをかなり改善できる。更に、干渉を受けたGPS信号の持続的なコヒーレントな統合を可能にするために、この精度は重要である。これを達成するために、図1に示されている慣性計測ユニット(IMU)24のような適切なフライホイールをフィードフォワードに使用して、時間と空間との両者においてGPSを追跡する。例えば、IMUが、センチメートルレベルの位置のフライホイールを提供でき、イリジウムが、高性能の、20psレベル(光速変換でセンチメートルレベル)のタイミングソースを提供できるならば、GPS信号を持続期間の間コヒーレントに統合できる。全体的な統合されたNav−Comシステムは、ロックイン増幅器に似ている。ロックイン増幅器は、繊細な物理学の実験で用いられることが多い。イリジウムと、リアルタイムの基準局の較正と、ユーザ機器内の、GPSとイリジウムとの間で使用される様々な局部発振器の安定した処理は、重要な設計事項である。干渉が存在する場合に、通常のGPS信号は、微弱過ぎて示すことができない。
【0048】
クロックパラメータを含む、衛星とユーザの位置状態を正確にモデル化して推定することによって、ユーザがかなりの動力を受けた場合であっても、iGPSは、到来GPS信号に対するレプリカの搬送波位相を、到来微弱信号の搬送波位相にほぼぴったり一致するセンチメートルレベルに設定する。干渉を受けた状態であっても、ユーザ機器は、誤差信号を次第に統合して、I成分とQ成分とを生成して、I成分とQ成分とを観測可能量として使用して、受信機の追跡ループを終えることができる。固有の精度も重要なアップリンク能力を可能にし、動力を受けても、アップリンクチャネルにおいて持続的な位相の安定性を生成できるユーザ機器を提供できる。
【0049】
何秒もの間隔にわたってセンチメートルレベルの位相に搬送波が安定している場合は、アップリンクの干渉阻止を改善して、LPI通信を続けることができる。ユーザが周波数と時間とに対するデータ変調を精密に拡散できるようにすることによって、このようなアップリンクの改善が実現される。
【0050】
航法/通信プロセッサは、ユーザ機器の処理とデータの流れとを制御する。航法/通信プロセッサは、ユーザの状態に基づく精密なモデルから構成されるカルマンフィルタと、ユーザ機器の処理と測定の雑音を最適に管理する手段とを含む。テーブル1は、重要な航法/通信プロセッサの属性のリストを提供する。
【表1】
【0051】
テーブル1に記載されている補助情報は、イリジウム衛星からデータリンクを介して提供される。観測可能量は、GPSと、イリジウムと、IMUとから集めた生の測定値である。オプションのセンサを更に備えてもよく、オプションのセンサは、低コストの磁力計と気圧計とを更に含む。テーブル1に記載されているカルマンフィルタの状態は、実際のシナリオでユーザ機器において名目上推定される状態である。最後に、NCOの制御出力が記載されており、これらが信号処理のハードウェアを駆動する。これらの命令は、カルマンフィルタの状態パラメータの関数として計算される。DAGRに入る基準入力信号の電力を適切に制御することが、非常に重要である。電力が大き過ぎる場合は、基準入力信号がDAGRを故障させる。電力が小さ過ぎる場合は、信号を検出できず、システムは実益を失う。信号を制御するために取り入れられる方策を選んで、到来干渉レベルを追跡するが、更なるバックオフを受ける。これは、全体的な性能が到来干渉によって動かされることを保証している。動作中の更なる予防措置として、到来GPS信号の電力が基準信号の電力から確実に独立するように、到来GPS信号の電力を監視する。
【0052】
図4は、本発明の好ましい実施形態の原理を具体化する初期設定と動作制御の方法のフローチャートである。デバイスの起動時の第1のステップ100では、アドオンのユーザハードウェアが、基準信号をオフにする。次に、ステップ110では、到来干渉雑音を測定する。ステップ120では、到来雑音電力のベンチマークを得るために、測定した干渉雑音を記録する。到来雑音電力と、基準信号とを比較する。基準電力が到来干渉電力よりも優位に立っていることを、AGC機能が検出するまで、基準信号の電力をdBのステップでインクリメントして(ステップ140と150)、干渉を測定する(ステップ130)。この較正に基づいて、アドオンのGNSSユーザ機器は、命令された基準信号の電力と、AGCに入力された検出された電力との間におけるスケールファクタを計算して記録するステップ160を実行する。較正が完了すると、DAGRの信号プロセッサは、高い搬送波対雑音比を有する基準信号に簡単にアクセスできると考えられる。
【0053】
次のステップ170では、基準信号のロックを初期設定する。これを行うために、既存のGNSSユーザ機器のシリアルポートを通して往復メッセージを送ることによって、およその時間を得ることができる。発振器の可能性の高い周波数のずれに関する事前情報と、シリアルポートのメッセージとに基づいて、およその時間と周波数とのサーチウィンドウを導き出す。次に、DAGRの相関器のチャネルのうちの1本を、基準信号に割り振る。航法/通信プロセッサ21は、定められた周波数と時間とのサーチウィンドウを一斉に調べるように、そのチャネルに命令して、基準信号を捕捉して追跡する。
【0054】
基準信号の追跡時に、定常状態を得て、初期設定ステップ170が完了する。次に、ステップ180では、AGCで干渉を測定する。ステップ190では、公称の動作モードは、到来干渉レベルからおよそ30dBの基準信号に対してバックオフを設定する。
【0055】
判断の正しさの更なるチェックとして、航法/通信プロセッサ21は、GPSの統合の時定数と同等であって、場合によっては10秒よりも長い時定数で、ディザ電力レベルを基準信号に加えることができる。到来GPS信号の電力を推定する、図1に示されている実施形態の航法/通信プロセッサ21におけるカルマンフィルタは、各到来GPS信号の電力を名目上追跡する。追跡される信号の電力と基準電力とが、かなり相関している場合は、基準電力は大き過ぎるかもしれず、下方修正すべきである。
【0056】
本発明の好ましい実施形態の長所は、GPSのr.f.のタイミング及びレンジングの測定値と、イリジウムのr.f.のタイミング及びレンジングの測定値との両者に対して、特に、搬送波位相成分に対して、共通の精度の発振器の基準を提供することである。GPSのプラットフォームとイリジウムのプラットフォームとの両者に共通の安定した搬送波位相の基準は、上述の軍部におけるGPS到来信号の電力レベルに対するコヒーレント処理技術と、他の応用とのまだ利用されていない効果を明らかにする。特に、GPSとイリジウムのプラットフォームは、相互の19cmのLバンドの波長のほんの僅かの中で、良く安定しているはずである。この条件は、距離に関して0.5cm、又は時間に関して20psに変換される。特に、電子機器のバイアスが変動する場合は、これは厳しい精度レベルである。電子機器のバイアスは、温度又は機械的ストレスのような環境と共に変化する。カルマンフィルタを、限られた範囲のバイアス変動に対処するように設計できるが、そのような変動を超えると、実際の動作のシナリオでは、統合されたNav−Comの実際的な恩恵は、直ぐに失われる。その結果、ユーザ機器は動作できなくなる。
【0057】
図5は、一般性を失うことなく、緊密なチャネル間の位相のコヒーレンスを維持するように、既存のGPSユーザ機器と、新たなイリジウムトランシーバ能力とを統合した従来のアプローチを示している。このような統合に必要なデータポートに加えて、受信機78を物理的に変更して、GPSとイリジウムとの間で共有する共通のハードウェアの発振器79を加えることによって、共通の発振器が提供されている。示されているように、共通の発振器79をGPSのコード合成器80に接続し、更に、共通の発振器79を、追加のポート81を通して、イリジウムのコード合成器82に接続する。GPSのコード合成器80は、それぞれの信号入力に接続される。それぞれの信号入力は、共通のアンテナ83と、GPSのフィルタ84と、前置増幅器85と、ディジタイザ86とを含む。一方で、イリジウムのコード合成器は、共通のアンテナ83と、イリジウムのフィルタ87と、前置増幅器88と、ディジタイザ89とに接続される。
【0058】
次の分析は、この従来のアプローチのバイアスの感度をトレースしている。具体的には、1分以上の間隔に対して<<20psのレベルに安定性を保つという条件で、ノードDの安定性に対するノードBの安定性を評価する。この分析をするために、多くの詳細を無視する。詳細は、例えば、多くのGPS受信機が、r.f.のフロントエンドを有し、中間周波数にダウンコンバートするといったことである。しかしながら、一般性を失うことなく、この分析に対して、ベースバンドに直接にダウンコンバートすると想定する。図6に示されている好ましい実施形態の改善された安定性をサポートして、同様の結論に至ることを、更なる分析は示している。
【0059】
この分析は、BPSK信号を想定している。BPSK信号は、GPS波形のフォーマットである。イリジウムはQPSKを採用しているので、重ね合わせの原理によって、BPSKの分析をそのまま適用できる。ノード1における到来信号s1(t)は、次の式によって与えられる。
【数1】
【0060】
なお、d(t)は、データ変調であり、c(t)は、PRNのチップ化したシーケンスであり、ω0は、帯域中の公称の中心角周波数であり、φ(t)は、受信信号の到来搬送波位相である。信号は、信号経路A−BとA−Dを通って伝搬し、信号経路A−BとA−Dは、それぞれバイアスb21とb41とを加える。
【数2】
【0061】
発振器は、公称の位相出力を有する。公称の位相出力は、ノードCで測定される受信機のクロックタイムt3(t)であると想定する。
【数3】
【0062】
なお、τは、ノードCで測定される受信機の瞬間クロックバイアスである。共通の発振器は、2つのタップ、即ち、GPSの処理経路のためのタップと、インジウムの処理経路のためのタップとを使って、合成器を駆動する。ノードBとDとに配線された、関連する相互接続された電子機器と、各合成器とによって、経路バイアスb23とb43とが生じる。各ノードで測定される、結果として得られる受信機のクロックタイムは、次の式によって得られる。
【数4】
【0063】
次に、ノードBとDとにおいて、別々のA/Dコンバータによって、各信号をサンプリングする。受信機のクロックタイムの入力が複数のサンプリング期間Tに入るときに、各A/Dコンバータは信号をサンプリングする。ノードBの場合は、次の通りである。
【数5】
【0064】
ノードBにおいてサンプルkが得られる時間tA/D[k,2]について解くと、次の通りになる。
【数6】
【0065】
ノードBに対するサンプリング時間を、ノードBに対する受信信号の式に挿入すると、次の通りになる。
【数7】
【0066】
ノードDに対する同等の式は、次の通りである。
【数8】
【0067】
各チャネルに対するコードとデータは、ダウンストリームで消される。ここでは、変調とその処理の任意の位相の寄与を無視する。ノードCとノードDとの間における、任意のサンプルkに対する搬送波位相の差は、次のように、各信号に対する余弦偏角(cosine argument)間の差として直接的に得られる。
【数9】
【0068】
<〜8km/秒で移動するLEO衛星の場合に、ベースバンドにおけるタイムタグの誤差は十分に小さいと想定されるので、到来信号の位相φと、受信機のクロックバイアスτは、サンプル時間の基準の選択に関係ない。項ω0は、時間と位相角との間における単位変換のスケールファクタになり得る。瞬間的なr.f.のバイアスの振る舞いについての実質的な項をそのままにするように単純化すると、次の通りになる。
【数10】
【0069】
図5における従来のベンチマークの構成に対するこの結果は、密接に統合されたNav−Comを直ちにサポートしないことを示唆している。ハードウェアの変更を最低限にするならば、統合された全体的なデバイスに、2つ以上の別個の機械的ハウジングが必要である。多くの実用的な統合の場合に、ハウジングを空間的に分けて、ケーブルを介して各々を相互接続することが、必要である又は望ましい。上述のバイアス項の各々は、異なる温度感度の影響を受けるであろう。各ハウジングは、異なる温度で動作し得る。任意の所定の対のバイアス項を区別して消去すると、バランスがとれ得るが、特に、DAGRの既存のハウジングと電子機器とを変えないままにする場合に、このようなバランスをとるのが難しいことは簡単に分かる。
【0070】
例えば、項b23とその熱感度の特性は、DAGRの内部にあり、ユーザ機器の統合体の制御を受けない。片方の項b21は、異なるハードウェアのプラットフォームにまたがる場合もあり、又はまたがらない場合もあるが、それにも関わらず、異なる熱及び機械的環境の影響を受ける。従って、統合体が、ロバストで実用的なやり方で、項b23を区別して消去するのは困難である。同様に、項b41は、(例えば、外部アンテナを使用する場合に)DAGRの外部の同じ機械的ハウジングを共有する場合もあり、又は共有しない場合もあり、項b12を直ちに消去しない。項b12は、DAGRの中までハウジングを必ずまたぐはずである。最後に、項b41は、DAGRの外部の機械的ハウジングを共有する場合もあり、又は共有しない場合もあるが、それにも関わらず、項b43のバランスをとらなければならない。項b43は、異なるハウジングを必ずまたぐので、熱と、機械と、他の環境のストレスを受ける。
【0071】
全体的にとらえると、安定性を20psレベルに維持することを条件とすると、熱と機械のストレスを含む環境のストレスが、許容できないほどの逸脱を加える場合がある。既存のDAGRのハードウェアを物理的に変更しなければ、このような環境ストレスを簡単に制御又は軽減できないことが簡単に分かるであろう。残念なことに、このような物理的な変更をすると、密接に統合されたNav−Comのための実用的なアップグレードの経路を提供するという中心的な目的を達成できない。
【0072】
他方で、図6は、本発明を単純な形態で示している。図6は、図5と同じやり方で、環境的な位相の安定性を簡単に分析できる。既に記載したように、次の分析の目的は、DAGRのノードeとアドオンモジュールのノードdとの間における固有の安定性を評価することである。アドオンモジュールの受信機のクロックタイムは、アドオンモジュールのノードcで生成され、次の式によって与えられる。
【数11】
【0073】
更に、ノードdとeとにおける受信機のクロックタイムは、次のように与えられる。
【数12】
【0074】
新たなインターフェイスの基準信号r(t)を、GPSのPコードp(t)で変調する。Pコードは、アドオンモジュールによって生成され、次のようにノードeに伝達される。
【数13】
【0075】
任意の到来信号を追跡する前であっても、カルマンフィルタは、DAGRのクロックバイアスτDAGR(t)と、iGPSアドオンモジュールのクロックバイアスτ(t)の推定値の伝搬を開始する。基準信号の疑似距離の測定値は、信号対雑音比が大きく、基準信号の搬送波位相の精度にかなり重み付けをして、アドオンモジュールとGPS受信機との発振器を効果的に位相ロックさせると想定される。同じ信号のDAGRのレプリカは、次の式によって与えられる。
【数14】
【0076】
位相と遅延のロックの際にアドオンモジュールにおける航法/通信プロセッサによって指示される、DAGRの相関器によって測定される疑似距離の観測可能量ρ(t)は、次の式によって得られる。
【数15】
【0077】
起動時は、関連するモジュールのクロックバイアスのみを観測するが、受信機が衛星を追跡すると、実際のクロックバイアスを解くことができる。iGPSアドオン受信機、既存のGPS受信機、又は両者が、追跡を開始すると、位置と、時間と、適用可能な範囲までの、上述のテーブル1に記載された他の状態との推定を開始するのに十分な情報が、カルマンフィルタに利用可能になる。
【0078】
新たな方法に対する同じ分析アプローチを採用すると、ノードeで測定される信号は、次の式によって与えられる。
【数16】
【0079】
次に、ノードeで得られる総合的な信号は、到来信号s5(t)とr5(t)との和である。DAGR、或いは任意の他のGPS又はGNSSの受信機の内部の詳細は、一般に独占権の下にあるか又はさもなければ保護されているので、フロントエンドの単純化したモデルを想定する。ここでも、一般性を失うことなく、この分析のために、直接的なダウンコンバージョンを想定する。これは、他の特定のケースに容易に拡張できると想定される。サンプルレートTを有するNav−Comアドオンモジュールに対して、DAGRは、異なるサンプル間隔TDAGRを有すると想定する。既に記載したように、受信機のクロックタイムを考慮して、A/Dのサンプル時間を計算して、次に、実際の時間を考慮して、各測定値mを解く。
【数17】
【0080】
ノードeにおいて結果として得られるA/Dコンバータの出力は、次の通りである。
【数18】
【0081】
ノードdにおける信号とA/Dクロックを、上述と同じやり方で処理する。
【数19】
【0082】
2つの信号の位相を比較する前に、r.f.のサンプリングイベントのタイムタグ、特に、r.f.の位相の項、ω0mTDAGRとω0kTとを考慮に入れて、信号を処理することが極めて重要である。一般に、r.f.とベースバンドの項は両者共、持続期間、好ましくは、1分以上のオーダの時間に対して<<20psのサンプリングの安定性を有していなければならない。分析の便宜上、DAGRとNav−Comアドオンモジュールとの間におけるA/Dサンプルを対にして、これらがほぼ同時に現われるようにする。一般に、2つのクロックは非同期に実行されており、且つ2つの別々のサンプリングレートが想定されているので、プラットフォームの任意の所定のサンプルが、ちょうど同時に現われることは考えられない。
【0083】
次の展開は、任意の所定の相互のプラットフォームのサンプル間における経過時間の明示的な計算を提供する。最初に、各サンプルに対する受信機のクロックタイムは、次の通りであることを想起する。
【数20】
【0084】
次に、サンプル時間が互いに近い、即ち、1サンプル程度以内にあるように、マッチした対のA/Dサンプル、kmとmkを選択する。〜50MHzのサンプルクロックを想定した場合に、所定の対のサンプルは、互いに0.02μs内に通常現われる。任意の所定の対のサンプルに対して、受信機のクロックタイムにおけるサンプルエポック間の時間差は、δtLOによって、次のように与えられる。
【数21】
【0085】
受信機のクロックタイムに対する上述の関係を代わりに使うと、成分バイアスを考慮に入れた後に経過時間に適用する時間差は、次にように示される。
【数22】
【0086】
δtLOの期間内に、クロックバイアスはあまり変化しないと想定される。次のステップでは、サンプル時間と受信機のクロックタイムとの間における次の変換を代わりに使う。
【数23】
【0087】
その結果、次の式になる。
【数24】
【0088】
DAGRの各サンプルエポックで求められるプラットフォーム間の疑似距離に対する上述の式を代わりに使うと、次のようになる。
【数25】
【0089】
従って、δtLOに対する明示的な式は、次によって与えられる。
【数26】
【0090】
受信機は、右側のパラメータを全てリアルタイムで得られる。次に、Nav−Comアドオンモジュールからの時間軸と共通の時間軸に投影するのに必要な範囲まで、結果として得られる位相回転ω0δtLOを、DAGRの生の相関関係に適用することができる。
【0091】
GPSのPコードとYコードとのセットが事実上直交しているのは周知である。この感度を分析するために、(i)信号r5の位相から独立して、信号s5の位相を追跡でき、(ii)コードとデータとを消すことによる任意の位相のバイアスの寄与を無視できると想定される。ノードeにおいて基準位相に対する到来信号の位相を計算すると、次の式が得られる。
【数27】
【0092】
DAGRの相関器によって測定される基準信号の既知の疑似距離に対する上述の式を代わりに使って、DAGRのクロックバイアスに対する基準を削除する。更に、δtLOに対する上述の式を代わりに使う。図5に対する分析におけるように、衛星の搬送波位相φと、関連するクロックバイアスτのベースバンド値は、選ばれたサンプリングエポックにわたって事実上一定を維持すると想定される。位相の安定性に対する全体的に20psの条件と比較して、ベースバンドのタイムタグに対する公差は比較的に緩い。ユーザに対するLEO衛星の速度が8km/秒を超えず、更に、ユーザ機器の発振器の周波数誤差が、この速度(Lバンドで40kHzよりも相当に低いものと同等である)によって制限されると想定すると、0.1μsのタイムタグの正確さは、位相の誤差を波長の僅かな部分に制限するのに十分である。単純化すると、最終的な結果は、次の式によって与えられる。
【数28】
【0093】
これは、前の分析の式と同じである。しかしながら、ここに説明されている方法を適用し、且つ図6を参照することによって、上述のr.f.バイアスの4つは全て、アドオンユニットの設計者によって完全に制御されることが簡単に分かるであろう。何れにしても、バイアスは、DAGRのバイアス特性に最早左右されない。この分析により、この設計は、統合に関連する環境から独立している。2本のr.f.経路に沿ってコンポーネントを対にするか、又は2本のクロック経路に沿ってコンポーネントを対にして、区別して消去するといった、実用的な技術を、設計者は自由に用いる。更に、1チップの同じ回路カード又は基板上に、バイアス感知コンポーネントを全て配置できるので、設計者は、熱、機械、又は任意の他の環境ストレスを確実に最小化する又はバランスをとる実用的な手段が得られる。
【0094】
全体的に判断して、本発明は、ハードウェアを変更せずに、在庫のDAGRを、兵站部レベルでアップグレードすることを可能にしている。DAGRにおいてソフトウェアのみを変更するので、DAGRが独立形式である場合に、これは当初の目的にとって有益である。従って、ソフトウェアを修正するこのようなDAGRは、ロジスティクス、動作、又はメンテナンスに対して実際的な影響を及ぼさない。
【0095】
更に、密接に統合されたアップグレードユニットと、組み込まれたグローバルな通信リンクとの組み合わせは、ロジスティクスに対する一定の恩恵を可能にする。ソフトウェアは、iGPSアドオンコンポーネントのフラッシュメモリに配置され得る。DAGRの再プログラミングは、シリアルポートを介して既に行なわれており、iGPSアドオンコンポーネントはこのシリアルポートに接続する必要がある。再プログラミングスイッチを使用して、iGPSアドオンコンポーネントを再プログラミングモードに切り換えてもよく、標準のDAGRの再プログラミングを使用してもよい。別のアプローチでは、イリジウム介して、新たなDAGRのソフトウェアのロードを送る。
【0096】
ここに記載されている標準的なインターフェイスを使用して、DAGRをアップグレードすると、密接に統合されたグローバルなNav−Comの能力を有するiGPSのユーザ機器になる。本発明は既存のDAGRの実用的なアップグレードを可能にするので、イリジウムの配置の残りの寿命中に、軍部がiGPSの恩恵を受けるならば、新たな軍用のGPS受信機を生産する必要はない。従って、iGPSを実用化して配備とテストをすることによって、本発明は、iGPS自体のデモンストレーションを容易にする。更に、統合されたNav−Comの能力を備えたLEO及びMEOの航法衛星のハイブリッドの配置としてのiGPSである、本発明は、より高度な将来のグローバルな統合されたNav−Comを開発する存在証明を提供するのを助ける。
【0097】
当業者が本発明を作成及び使用できるほど十分に詳しく、本発明の好ましい実施形態を記載したが、それにも関わらず、本発明の意図から逸脱することなく、例示された実施形態の多数のバリエーションと変更を作成できることが分かるであろう。例えば、ここに記載されている方法が当業者によって理解されると、iGPS及び地域ネットワークと、他のLEO及びGNSS全地球航法通信の応用とを含むユーザ機器と一群の実施形態とを包含するように、簡単に拡張できる。従って、本発明は、上述の説明又は添付の図面によって制限されることを意図されておらず、請求項のみに従って定められる。
【符号の説明】
【0098】
1・・・DAGR、2・・・アドオン拡張モジュール、3・・・双方向のシリアルポート、4・・・外部アンテナの入力、5、83・・・共通のアンテナ、6、7・・・帯域フィルタ、8、9・・・前置増幅器、10・・・発振器、11・・・合成器、12・・・A/Dコンバータ、13・・・ヒルベルト変換処理機能又は回路、16・・・ヒルベルト逆変換処理機能又は回路、14・・・信号プロセッサのバンク、17・・・D/Aコンバータ、18・・・可変減衰器、19・・・増幅器、20・・・変調器、21・・・中央の航法/通信プロセッサ、22・・・GPSのPコード生成器、23・・・構成制御、24・・・慣性計測ユニット、25・・・数値制御発振器、26・・・イリジウムのコード生成器、30・・・可変減衰器、31・・・自動利得制御、40・・・GPS衛星、41・・・イリジウム衛星、42・・・基準局、43・・・アンテナ、79・・・共通の発振器、80・・・GPSのコード合成器、81・・・追加のポート、82・・・イリジウムのコード合成器、84、87・・・フィルタ、85、88・・・前置増幅器、86、89・・・ディジタイザ。
【特許請求の範囲】
【請求項1】
既存の全地球航法衛星システム(GNSS)ユーザ機器をアップグレードする方法であって、
第1のGNSSユーザハードウェアを提供するステップと、
前記第1のGNSSユーザハードウェアと分かれている、既存の第2のGNSSユーザデバイスを提供するステップと、
前記第2のGNSSユーザデバイスのハードウェアを修正することなく、前記第1のGNSSユーザハードウェアを、既存のポートを介して、前記第2のGNSSユーザデバイスに接続するステップと、
を含み、
前記第1のGNSSユーザハードウェアは、
第1の発振器と、
航法/通信プロセッサと、
を含み、
前記第1の発振器は、精密なコード化された基準信号の生成器を駆動し、
前記精密な符号化された基準信号の生成器は、基準信号を生成して、前記基準信号を既存の第2のGNSSユーザデバイスに供給するように構成されており、
前記航法/通信プロセッサは、到来GNSS信号と前記基準信号とのコヒーレントな相関関係について、前記第2のGNSSユーザデバイスから受信すると、位置、航法、及び/又はタイミングの信号を生成するように構成されており、
前記第2のGNSSユーザデバイスは、
少なくとも1つの既存のポートと、
第2の発振器と、
を含み、
前記第2の発振器は、
到来GNSS信号と、アドオンの前記第1のGNSSユーザハードウェアによって生成された前記基準信号との前記コヒーレントな相関関係を生成して、
前記コヒーレントな相関関係を前記第1のGNSSユーザハードウェアに送るように構成されている、
方法。
【請求項2】
前記第1のGNSSユーザハードウェアは、
前記第2のGNSSユーザデバイスからの前記コヒーレントな相関関係と、それ自身の生の精密な相関関係とを組み合わせて、
位置、速度、及び/又は時間に対する精密な解を導き出す、請求項1の方法。
【請求項3】
前記少なくとも1つの既存のポートは、アンテナポートとデータポートとを含み、
前記第1のGNSSユーザハードウェアは、
前記基準信号を、前記アンテナポートを通して、前記第2のGNSSユーザデバイスに送るように構成されており、
前記第1のGNSSユーザハードウェアは、
指示命令を前記第2のGNSSユーザデバイスに送って、
前記コヒーレントな相関関係を、前記データポートを通して受信するように構成されている、請求項1の方法。
【請求項4】
前記第1のGNSSユーザハードウェアは、イリジウム受信能力を含み、
前記第2のGNSSユーザデバイスは、全地球測位システム(GPS)受信機である、請求項3の方法。
【請求項5】
イリジウムの信号とGPSの信号は、共通のアンテナを通して入力される、請求項4の方法。
【請求項6】
前記第1の発振器は、GPSのr.f.のタイミング及びレンジングの測定値と、イリジウムのr.f.のタイミング及びレンジングの測定値との両者に対する共通の精密な発振器の基準を提供する、請求項4の方法。
【請求項7】
前記第1の発振器は、GPSのプラットフォームとイリジウムのプラットフォームとの両者に共通の搬送波位相の基準を提供する、請求項6の方法。
【請求項8】
前記第2のGNSSユーザデバイスは、防衛高度GPS受信機(DAGR)である、請求項4の方法。
【請求項9】
更に、前記第1のGNSSユーザハードウェアは、イリジウム送信能力を含む、請求項4の方法。
【請求項10】
前記第1のGNSSユーザハードウェアは、Yコード、Mコード、及び/又はC/Aコードの追跡能力を含む、請求項9の方法。
【請求項11】
更に、前記第2のGNSS受信機は、Mコードの能力を含む、請求項9の方法。
【請求項12】
更に、前記第2のGNSS受信機は、ガリレオ(Galileo)、グロナス(GLONASS)、及び/又はコンパス(COMPASS)の能力を含むか、或いは市販のC/Aコード受信機である、請求項11の方法。
【請求項13】
前記第1のGNSSユーザデバイスにおいてカルマンフィルタを用いて、前記到来信号の前記搬送波位相を使用して、前記ユーザ機器の位置、速度、及び時間をモデル化して推定するステップ、を更に含む、請求項1の方法。
【請求項14】
基準局を使用して、視界内の衛星の前記コードと搬送波とを較正して、前記較正データを通信衛星にテレメータで送信するステップ、を更に含み、
前記通信衛星の放送された出力は、前記第1のGNSSユーザハードウェアに接続され、
前記通信衛星の較正データを用いて、前記位置、速度、及び時間の解を改善する、請求項13の方法。
【請求項15】
前記カルマンフィルタは、慣性計測ユニット(IMU)からの観測可能なデータを含む、請求項14の方法。
【請求項16】
前記第1のGNSSユーザハードウェアは、送信機コンポーネントを含み、
前記送信機コンポーネントは、その改善された位置、速度、及び時間の推定値を使用して、その送信の時間と周波数との同期化を改善する、請求項14の方法。
【請求項17】
前記送信は、地域通信ネットワークに接続される、請求項16の方法。
【請求項18】
前記送信は、衛星ネットワークに接続される、請求項15の方法。
【請求項19】
前記送信は、低地球軌道衛星のグローバルネットワークに接続される、請求項18の方法。
【請求項20】
前記第1のGNSSユーザハードウェアは、イリジウム受信能力を含むアップグレードモジュールであり、
前記航法/通信プロセッサは、前記アップグレードモジュールの内部の動作を指示する中央の航法/通信プロセッサであり、
前記航法/通信プロセッサは、信号プロセッサのバンクによって実施される複数のイリジウム相関器に対する制御ループドライバと、GPSのPコード生成器と、送信及び受信機機能に対する構成制御と、前記第2のGNSSユーザデバイスに対するインターフェイスと、を含む、請求項1の方法。
【請求項21】
前記航法/通信プロセッサは、微小電気機械システム(MEMS)の慣性計測ユニット(IMU)に対するインターフェイス、を更に含む、請求項20の方法。
【請求項22】
前記航法/通信プロセッサは、気圧計及び/又は磁力計から信号を受信するそれぞれのインターフェイス、を更に含む、請求項20の方法。
【請求項23】
前記信号プロセッサのバンクは、レプリカコードを合成し、
前記レプリカコードは、各イリジウム衛星が放送すると分かっているものと一致しており、
前記レプリカコードは、スペクトラム拡散信号の直接シーケンスのチップを生成するために、前記ユーザに前もって分かっている予め特定された一連のメッセージビットで構成されており、従って、到来イリジウム信号の時間と搬送波位相とを決定することができる、請求項20の方法。
【請求項24】
前記航法/通信プロセッサは、可変減衰器を積極的に制御して、Pコードの基準信号が、干渉を受けても検出されるほど十分に強いが、望ましくない干渉源になるほど強くないことを保証する、請求項20の方法。
【請求項25】
前記航法/通信プロセッサは、アンテナ端子から出てきた全ての電力を追跡して、前記電力を一定の値に調整するために、自動利得制御(AGC)を監視して、到来した複合のGPS及び航法信号を、前記第2のGNSSユーザ機器にルーティングする、請求項20の方法。
【請求項26】
前記第1のGNSSユーザハードウェアが、基準入力の初期設定と制御ルーティングとを実行して、
a.基準信号電力を最小化するステップと、
b.自動利得制御(AGC)において干渉を測定するステップと、
c.前記測定された干渉に基づいて、ベンチマークを記録するステップと、
d.閾値に達するまで、基準信号の電力をインクリメントして、前記AGCにおいて干渉を測定して、スケールファクタを記録するステップと、
e.基準信号のロックを初期設定するステップと、
f.前記AGCにおいて干渉を再び測定するステップと、
g.バックオフを適用するステップと、
を含む、請求項20の方法。
【請求項27】
既存の第2のGNSSユーザデバイスを修正する必要なしに、密接に統合されたNav−Comの能力を加えることによって、既存の前記第2のGNSSユーザデバイスをアップグレードする、アドオンの第1の全地球航法衛星システム(GNSS)ユーザハードウェアであって、
前記アドオンの第1の全地球航法衛星システム(GNSS)ユーザハードウェアは、
第1の発振器と、
航法/通信プロセッサと、
少なくとも1つのポートと、
を含み、
前記第1の発振器は、精密なコード化された基準信号の生成器を駆動し、
前記精密な符号化された基準信号の生成器は、基準信号を生成して、前記基準信号を既存の第2のGNSSユーザデバイスに供給するように構成されており、
前記航法/通信プロセッサは、到来GNSS信号と前記基準信号とのコヒーレントな相関関係について、前記第2のGNSSユーザデバイスから受信すると、位置、航法、及び/又はタイミングの信号を生成するように構成されており、
前記少なくとも1つのポートは、前記第2のGNSSユーザデバイスのハードウェアを修正することなく、前記第2のGNSSユーザデバイスの既存のポートを通して、前記アドオンのGNSSユーザハードウェアを、前記第2のGNSSユーザデバイスに接続する、
アドオンの第1の全地球航法衛星システム(GNSS)ユーザハードウェア。
【請求項28】
前記アドオンのGNSSユーザハードウェアは、
前記第2のGNSSユーザデバイスからの前記コヒーレントな相関関係と、それ自身の生の精密な相関関係とを組み合わせて、
位置、速度、及び/又は時間に対する精密な解を導き出す、請求項27に記載のアドオンのGNSSユーザハードウェア。
【請求項29】
前記少なくとも1つの既存のポートは、アンテナポートとデータポートとを含み、
前記アドオンのGNSSユーザハードウェアは、
前記基準信号を、前記アンテナポートを通して、前記第2のGNSSユーザデバイスに送るように構成されており、
前記アドオンのGNSSユーザハードウェアは、
指示命令を前記第2のGNSSユーザデバイスに送って、
前記コヒーレントな相関関係を、前記データポートを通して受信するように構成されている、請求項27に記載のアドオンのGNSSユーザハードウェア。
【請求項30】
前記アドオンのGNSSユーザハードウェアは、イリジウム受信能力を含み、
前記第2のGNSSユーザデバイスは、全地球測位システム(GPS)受信機である、請求項27に記載のアドオンのGNSSユーザハードウェア。
【請求項31】
前記第2のGNSSユーザデバイスは、防衛高度GPS受信機(DAGR)である、請求項30に記載のアドオンのGNSSユーザハードウェア。
【請求項32】
更に、前記アドオンのGNSSユーザハードウェアは、イリジウム送信能力を含む、請求項30に記載のアドオンのGNSSユーザハードウェア。
【請求項33】
前記アドオンのGNSSユーザハードウェアは、Yコード、Mコード、及び/又はC/Aコードの追跡能力を含む、請求項32に記載のアドオンのGNSSユーザハードウェア。
【請求項34】
更に、前記第2のGNSS受信機は、Mコードの能力を含む、請求項32に記載のアドオンのGNSSユーザハードウェア。
【請求項35】
更に、前記第2のGNSS受信機は、ガリレオ(Galileo)、グロナス(GLONASS)、及び/又はコンパス(COMPASS)の能力を含むか、或いは市販のC/Aコード受信機である、請求項34に記載のアドオンのGNSSユーザハードウェア。
【請求項36】
前記航法/通信プロセッサは、前記到来信号の前記搬送波位相を使用して、前記ユーザ機器の位置、速度、及び時間をモデル化して推定するために、前記第2のGNSSユーザデバイスにカルマンフィルタを含む、請求項27に記載のアドオンのGNSSユーザハードウェア。
【請求項37】
基準局を使用して、視界内の衛星の前記コードと搬送波とを較正して、前記較正データを通信衛星にテレメータで送信して、
前記通信衛星の放送された出力は、前記アドオンのGNSSユーザハードウェアに接続され、
前記通信衛星の較正データを用いて、前記位置、速度、及び時間の解を改善する、請求項36に記載のアドオンのGNSSユーザハードウェア。
【請求項38】
前記カルマンフィルタは、慣性計測ユニット(IMU)からの観測可能なデータを含む、請求項37に記載のアドオンのGNSSユーザハードウェア。
【請求項39】
前記アドオンのGNSSユーザハードウェアは、送信機コンポーネントを含み、
前記送信機コンポーネントは、その改善された位置、速度、及び時間の推定値を使用して、その送信の時間と周波数との同期化を改善する、請求項37に記載のアドオンのGNSSユーザハードウェア。
【請求項40】
前記送信は、地域通信ネットワークに接続される、請求項39に記載のアドオンのGNSSユーザハードウェア。
【請求項41】
前記送信は、衛星ネットワークに接続される、請求項39に記載のアドオンのGNSSユーザハードウェア。
【請求項42】
前記送信は、低地球軌道衛星のグローバルネットワークに接続される、請求項41に記載のアドオンのGNSSユーザハードウェア。
【請求項43】
前記第1と第2のGNSSユーザ機器は、共通のアンテナを共有する、請求項27に記載のアドオンのGNSSユーザハードウェア。
【請求項44】
前記アドオンのGNSSユーザハードウェアは、イリジウム受信能力を含むアップグレードモジュールであり、
前記航法/通信モジュールは、前記アップグレードモジュールの内部の動作を指示するために、前記アップグレードモジュールに含まれている中央の航法/通信プロセッサであり、
前記航法/通信プロセッサは、信号プロセッサのバンクによって実施される複数のイリジウム相関器に対する制御ループドライバと、GPSのPコード生成器と、送信及び受信機機能に対する構成制御と、前記第2のGNSSユーザデバイスに対するインターフェイスと、を含む、請求項27に記載のアドオンのGNSSユーザハードウェア。
【請求項45】
前記航法/通信プロセッサは、微小電気機械システム(MEMS)の慣性計測ユニット(IMU)に対するインターフェイス、を更に含む、請求項44に記載のアドオンのGNSSユーザハードウェア。
【請求項46】
気圧計及び/又は磁力計に対するそれぞれのインターフェイス、を更に含む、請求項44に記載のアドオンのGNSSユーザハードウェア。
【請求項47】
前記信号プロセッサのバンクは、レプリカコードを合成し、
前記レプリカコードは、各イリジウム衛星が放送すると分かっているものと一致しており、
前記レプリカコードは、スペクトラム拡散信号の直接シーケンスのチップを生成するために、前記ユーザに前もって分かっている予め特定された一連のメッセージビットで構成されており、従って、到来イリジウム信号の時間と搬送波位相とを決定することができる、請求項44に記載のアドオンのGNSSユーザハードウェア。
【請求項48】
前記航法/通信プロセッサは、可変減衰器を積極的に制御して、Pコードの基準信号が、干渉を受けても検出されるほど十分に強いが、望ましくない干渉源になるほど強くないことを保証する、請求項44に記載のアドオンのGNSSユーザハードウェア。
【請求項49】
前記航法/通信プロセッサは、アンテナ端子から出てきた全ての電力を追跡して、前記電力を一定の値に調整するために、自動利得制御(AGC)を監視して、到来した複合のGPS及び航法信号を、前記第2のGNSSユーザ機器にルーティングする、請求項44に記載のアドオンのGNSSユーザハードウェア。
【請求項1】
既存の全地球航法衛星システム(GNSS)ユーザ機器をアップグレードする方法であって、
第1のGNSSユーザハードウェアを提供するステップと、
前記第1のGNSSユーザハードウェアと分かれている、既存の第2のGNSSユーザデバイスを提供するステップと、
前記第2のGNSSユーザデバイスのハードウェアを修正することなく、前記第1のGNSSユーザハードウェアを、既存のポートを介して、前記第2のGNSSユーザデバイスに接続するステップと、
を含み、
前記第1のGNSSユーザハードウェアは、
第1の発振器と、
航法/通信プロセッサと、
を含み、
前記第1の発振器は、精密なコード化された基準信号の生成器を駆動し、
前記精密な符号化された基準信号の生成器は、基準信号を生成して、前記基準信号を既存の第2のGNSSユーザデバイスに供給するように構成されており、
前記航法/通信プロセッサは、到来GNSS信号と前記基準信号とのコヒーレントな相関関係について、前記第2のGNSSユーザデバイスから受信すると、位置、航法、及び/又はタイミングの信号を生成するように構成されており、
前記第2のGNSSユーザデバイスは、
少なくとも1つの既存のポートと、
第2の発振器と、
を含み、
前記第2の発振器は、
到来GNSS信号と、アドオンの前記第1のGNSSユーザハードウェアによって生成された前記基準信号との前記コヒーレントな相関関係を生成して、
前記コヒーレントな相関関係を前記第1のGNSSユーザハードウェアに送るように構成されている、
方法。
【請求項2】
前記第1のGNSSユーザハードウェアは、
前記第2のGNSSユーザデバイスからの前記コヒーレントな相関関係と、それ自身の生の精密な相関関係とを組み合わせて、
位置、速度、及び/又は時間に対する精密な解を導き出す、請求項1の方法。
【請求項3】
前記少なくとも1つの既存のポートは、アンテナポートとデータポートとを含み、
前記第1のGNSSユーザハードウェアは、
前記基準信号を、前記アンテナポートを通して、前記第2のGNSSユーザデバイスに送るように構成されており、
前記第1のGNSSユーザハードウェアは、
指示命令を前記第2のGNSSユーザデバイスに送って、
前記コヒーレントな相関関係を、前記データポートを通して受信するように構成されている、請求項1の方法。
【請求項4】
前記第1のGNSSユーザハードウェアは、イリジウム受信能力を含み、
前記第2のGNSSユーザデバイスは、全地球測位システム(GPS)受信機である、請求項3の方法。
【請求項5】
イリジウムの信号とGPSの信号は、共通のアンテナを通して入力される、請求項4の方法。
【請求項6】
前記第1の発振器は、GPSのr.f.のタイミング及びレンジングの測定値と、イリジウムのr.f.のタイミング及びレンジングの測定値との両者に対する共通の精密な発振器の基準を提供する、請求項4の方法。
【請求項7】
前記第1の発振器は、GPSのプラットフォームとイリジウムのプラットフォームとの両者に共通の搬送波位相の基準を提供する、請求項6の方法。
【請求項8】
前記第2のGNSSユーザデバイスは、防衛高度GPS受信機(DAGR)である、請求項4の方法。
【請求項9】
更に、前記第1のGNSSユーザハードウェアは、イリジウム送信能力を含む、請求項4の方法。
【請求項10】
前記第1のGNSSユーザハードウェアは、Yコード、Mコード、及び/又はC/Aコードの追跡能力を含む、請求項9の方法。
【請求項11】
更に、前記第2のGNSS受信機は、Mコードの能力を含む、請求項9の方法。
【請求項12】
更に、前記第2のGNSS受信機は、ガリレオ(Galileo)、グロナス(GLONASS)、及び/又はコンパス(COMPASS)の能力を含むか、或いは市販のC/Aコード受信機である、請求項11の方法。
【請求項13】
前記第1のGNSSユーザデバイスにおいてカルマンフィルタを用いて、前記到来信号の前記搬送波位相を使用して、前記ユーザ機器の位置、速度、及び時間をモデル化して推定するステップ、を更に含む、請求項1の方法。
【請求項14】
基準局を使用して、視界内の衛星の前記コードと搬送波とを較正して、前記較正データを通信衛星にテレメータで送信するステップ、を更に含み、
前記通信衛星の放送された出力は、前記第1のGNSSユーザハードウェアに接続され、
前記通信衛星の較正データを用いて、前記位置、速度、及び時間の解を改善する、請求項13の方法。
【請求項15】
前記カルマンフィルタは、慣性計測ユニット(IMU)からの観測可能なデータを含む、請求項14の方法。
【請求項16】
前記第1のGNSSユーザハードウェアは、送信機コンポーネントを含み、
前記送信機コンポーネントは、その改善された位置、速度、及び時間の推定値を使用して、その送信の時間と周波数との同期化を改善する、請求項14の方法。
【請求項17】
前記送信は、地域通信ネットワークに接続される、請求項16の方法。
【請求項18】
前記送信は、衛星ネットワークに接続される、請求項15の方法。
【請求項19】
前記送信は、低地球軌道衛星のグローバルネットワークに接続される、請求項18の方法。
【請求項20】
前記第1のGNSSユーザハードウェアは、イリジウム受信能力を含むアップグレードモジュールであり、
前記航法/通信プロセッサは、前記アップグレードモジュールの内部の動作を指示する中央の航法/通信プロセッサであり、
前記航法/通信プロセッサは、信号プロセッサのバンクによって実施される複数のイリジウム相関器に対する制御ループドライバと、GPSのPコード生成器と、送信及び受信機機能に対する構成制御と、前記第2のGNSSユーザデバイスに対するインターフェイスと、を含む、請求項1の方法。
【請求項21】
前記航法/通信プロセッサは、微小電気機械システム(MEMS)の慣性計測ユニット(IMU)に対するインターフェイス、を更に含む、請求項20の方法。
【請求項22】
前記航法/通信プロセッサは、気圧計及び/又は磁力計から信号を受信するそれぞれのインターフェイス、を更に含む、請求項20の方法。
【請求項23】
前記信号プロセッサのバンクは、レプリカコードを合成し、
前記レプリカコードは、各イリジウム衛星が放送すると分かっているものと一致しており、
前記レプリカコードは、スペクトラム拡散信号の直接シーケンスのチップを生成するために、前記ユーザに前もって分かっている予め特定された一連のメッセージビットで構成されており、従って、到来イリジウム信号の時間と搬送波位相とを決定することができる、請求項20の方法。
【請求項24】
前記航法/通信プロセッサは、可変減衰器を積極的に制御して、Pコードの基準信号が、干渉を受けても検出されるほど十分に強いが、望ましくない干渉源になるほど強くないことを保証する、請求項20の方法。
【請求項25】
前記航法/通信プロセッサは、アンテナ端子から出てきた全ての電力を追跡して、前記電力を一定の値に調整するために、自動利得制御(AGC)を監視して、到来した複合のGPS及び航法信号を、前記第2のGNSSユーザ機器にルーティングする、請求項20の方法。
【請求項26】
前記第1のGNSSユーザハードウェアが、基準入力の初期設定と制御ルーティングとを実行して、
a.基準信号電力を最小化するステップと、
b.自動利得制御(AGC)において干渉を測定するステップと、
c.前記測定された干渉に基づいて、ベンチマークを記録するステップと、
d.閾値に達するまで、基準信号の電力をインクリメントして、前記AGCにおいて干渉を測定して、スケールファクタを記録するステップと、
e.基準信号のロックを初期設定するステップと、
f.前記AGCにおいて干渉を再び測定するステップと、
g.バックオフを適用するステップと、
を含む、請求項20の方法。
【請求項27】
既存の第2のGNSSユーザデバイスを修正する必要なしに、密接に統合されたNav−Comの能力を加えることによって、既存の前記第2のGNSSユーザデバイスをアップグレードする、アドオンの第1の全地球航法衛星システム(GNSS)ユーザハードウェアであって、
前記アドオンの第1の全地球航法衛星システム(GNSS)ユーザハードウェアは、
第1の発振器と、
航法/通信プロセッサと、
少なくとも1つのポートと、
を含み、
前記第1の発振器は、精密なコード化された基準信号の生成器を駆動し、
前記精密な符号化された基準信号の生成器は、基準信号を生成して、前記基準信号を既存の第2のGNSSユーザデバイスに供給するように構成されており、
前記航法/通信プロセッサは、到来GNSS信号と前記基準信号とのコヒーレントな相関関係について、前記第2のGNSSユーザデバイスから受信すると、位置、航法、及び/又はタイミングの信号を生成するように構成されており、
前記少なくとも1つのポートは、前記第2のGNSSユーザデバイスのハードウェアを修正することなく、前記第2のGNSSユーザデバイスの既存のポートを通して、前記アドオンのGNSSユーザハードウェアを、前記第2のGNSSユーザデバイスに接続する、
アドオンの第1の全地球航法衛星システム(GNSS)ユーザハードウェア。
【請求項28】
前記アドオンのGNSSユーザハードウェアは、
前記第2のGNSSユーザデバイスからの前記コヒーレントな相関関係と、それ自身の生の精密な相関関係とを組み合わせて、
位置、速度、及び/又は時間に対する精密な解を導き出す、請求項27に記載のアドオンのGNSSユーザハードウェア。
【請求項29】
前記少なくとも1つの既存のポートは、アンテナポートとデータポートとを含み、
前記アドオンのGNSSユーザハードウェアは、
前記基準信号を、前記アンテナポートを通して、前記第2のGNSSユーザデバイスに送るように構成されており、
前記アドオンのGNSSユーザハードウェアは、
指示命令を前記第2のGNSSユーザデバイスに送って、
前記コヒーレントな相関関係を、前記データポートを通して受信するように構成されている、請求項27に記載のアドオンのGNSSユーザハードウェア。
【請求項30】
前記アドオンのGNSSユーザハードウェアは、イリジウム受信能力を含み、
前記第2のGNSSユーザデバイスは、全地球測位システム(GPS)受信機である、請求項27に記載のアドオンのGNSSユーザハードウェア。
【請求項31】
前記第2のGNSSユーザデバイスは、防衛高度GPS受信機(DAGR)である、請求項30に記載のアドオンのGNSSユーザハードウェア。
【請求項32】
更に、前記アドオンのGNSSユーザハードウェアは、イリジウム送信能力を含む、請求項30に記載のアドオンのGNSSユーザハードウェア。
【請求項33】
前記アドオンのGNSSユーザハードウェアは、Yコード、Mコード、及び/又はC/Aコードの追跡能力を含む、請求項32に記載のアドオンのGNSSユーザハードウェア。
【請求項34】
更に、前記第2のGNSS受信機は、Mコードの能力を含む、請求項32に記載のアドオンのGNSSユーザハードウェア。
【請求項35】
更に、前記第2のGNSS受信機は、ガリレオ(Galileo)、グロナス(GLONASS)、及び/又はコンパス(COMPASS)の能力を含むか、或いは市販のC/Aコード受信機である、請求項34に記載のアドオンのGNSSユーザハードウェア。
【請求項36】
前記航法/通信プロセッサは、前記到来信号の前記搬送波位相を使用して、前記ユーザ機器の位置、速度、及び時間をモデル化して推定するために、前記第2のGNSSユーザデバイスにカルマンフィルタを含む、請求項27に記載のアドオンのGNSSユーザハードウェア。
【請求項37】
基準局を使用して、視界内の衛星の前記コードと搬送波とを較正して、前記較正データを通信衛星にテレメータで送信して、
前記通信衛星の放送された出力は、前記アドオンのGNSSユーザハードウェアに接続され、
前記通信衛星の較正データを用いて、前記位置、速度、及び時間の解を改善する、請求項36に記載のアドオンのGNSSユーザハードウェア。
【請求項38】
前記カルマンフィルタは、慣性計測ユニット(IMU)からの観測可能なデータを含む、請求項37に記載のアドオンのGNSSユーザハードウェア。
【請求項39】
前記アドオンのGNSSユーザハードウェアは、送信機コンポーネントを含み、
前記送信機コンポーネントは、その改善された位置、速度、及び時間の推定値を使用して、その送信の時間と周波数との同期化を改善する、請求項37に記載のアドオンのGNSSユーザハードウェア。
【請求項40】
前記送信は、地域通信ネットワークに接続される、請求項39に記載のアドオンのGNSSユーザハードウェア。
【請求項41】
前記送信は、衛星ネットワークに接続される、請求項39に記載のアドオンのGNSSユーザハードウェア。
【請求項42】
前記送信は、低地球軌道衛星のグローバルネットワークに接続される、請求項41に記載のアドオンのGNSSユーザハードウェア。
【請求項43】
前記第1と第2のGNSSユーザ機器は、共通のアンテナを共有する、請求項27に記載のアドオンのGNSSユーザハードウェア。
【請求項44】
前記アドオンのGNSSユーザハードウェアは、イリジウム受信能力を含むアップグレードモジュールであり、
前記航法/通信モジュールは、前記アップグレードモジュールの内部の動作を指示するために、前記アップグレードモジュールに含まれている中央の航法/通信プロセッサであり、
前記航法/通信プロセッサは、信号プロセッサのバンクによって実施される複数のイリジウム相関器に対する制御ループドライバと、GPSのPコード生成器と、送信及び受信機機能に対する構成制御と、前記第2のGNSSユーザデバイスに対するインターフェイスと、を含む、請求項27に記載のアドオンのGNSSユーザハードウェア。
【請求項45】
前記航法/通信プロセッサは、微小電気機械システム(MEMS)の慣性計測ユニット(IMU)に対するインターフェイス、を更に含む、請求項44に記載のアドオンのGNSSユーザハードウェア。
【請求項46】
気圧計及び/又は磁力計に対するそれぞれのインターフェイス、を更に含む、請求項44に記載のアドオンのGNSSユーザハードウェア。
【請求項47】
前記信号プロセッサのバンクは、レプリカコードを合成し、
前記レプリカコードは、各イリジウム衛星が放送すると分かっているものと一致しており、
前記レプリカコードは、スペクトラム拡散信号の直接シーケンスのチップを生成するために、前記ユーザに前もって分かっている予め特定された一連のメッセージビットで構成されており、従って、到来イリジウム信号の時間と搬送波位相とを決定することができる、請求項44に記載のアドオンのGNSSユーザハードウェア。
【請求項48】
前記航法/通信プロセッサは、可変減衰器を積極的に制御して、Pコードの基準信号が、干渉を受けても検出されるほど十分に強いが、望ましくない干渉源になるほど強くないことを保証する、請求項44に記載のアドオンのGNSSユーザハードウェア。
【請求項49】
前記航法/通信プロセッサは、アンテナ端子から出てきた全ての電力を追跡して、前記電力を一定の値に調整するために、自動利得制御(AGC)を監視して、到来した複合のGPS及び航法信号を、前記第2のGNSSユーザ機器にルーティングする、請求項44に記載のアドオンのGNSSユーザハードウェア。
【図1】

【図2】
【図3】
【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2012−525586(P2012−525586A)
【公表日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2012−508484(P2012−508484)
【出願日】平成22年4月30日(2010.4.30)
【国際出願番号】PCT/US2010/001274
【国際公開番号】WO2011/016821
【国際公開日】平成23年2月10日(2011.2.10)
【出願人】(511265877)コヘレント・ナビゲーション, インコーポレイテッド (1)
【氏名又は名称原語表記】COHERENT NAVIGATION, INC.
【住所又は居所原語表記】1500 Fashion Island Blvd., #106, San Mateo, CA 94404, United States of America
【Fターム(参考)】
【公表日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成22年4月30日(2010.4.30)
【国際出願番号】PCT/US2010/001274
【国際公開番号】WO2011/016821
【国際公開日】平成23年2月10日(2011.2.10)
【出願人】(511265877)コヘレント・ナビゲーション, インコーポレイテッド (1)
【氏名又は名称原語表記】COHERENT NAVIGATION, INC.
【住所又は居所原語表記】1500 Fashion Island Blvd., #106, San Mateo, CA 94404, United States of America
【Fターム(参考)】
[ Back to top ]