
寝台装置及びMRI装置
【課題】大型化することなく簡単な機構で天板を離れた位置に設定することが可能な寝台装置及びMRI装置を提供すること。
【解決手段】MRI装置200において、少なくとも長手方向に移動する天板5と、
その天板5の下側に配置される寝台支持部12と、天板5及び寝台支持部12の間であって天板5の幅方向の中央に重ならない位置に配置され天板5と同一方向に移動するミドルフレーム6とを有し、寝台支持部12に対してミドルフレーム6が移動する間に、天板5とミドルフレーム6との相対位置関係を変更させる構成とする。
【解決手段】MRI装置200において、少なくとも長手方向に移動する天板5と、
その天板5の下側に配置される寝台支持部12と、天板5及び寝台支持部12の間であって天板5の幅方向の中央に重ならない位置に配置され天板5と同一方向に移動するミドルフレーム6とを有し、寝台支持部12に対してミドルフレーム6が移動する間に、天板5とミドルフレーム6との相対位置関係を変更させる構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像診断装置に用いられる寝台装置及びMRI(magnetic resonance imaging)装置に関する。
【背景技術】
【0002】
被検体を撮影して画像診断を行なう画像診断装置には、MRI装置、X線CT(computed tomography)装置、PET(positron emission tomography)装置、X線診断装置などがある。
【0003】
これらMRI装置、X線CT装置及びPET装置などの画像診断装置は、撮影を行なうための開口部が形成された架台部を有し、その開口部に被検体を挿入して撮影が行なわれる。また、循環器用のX線診断装置は、C字形の端部に対向して配置されたX線発生器及びX線検出器を備えた撮影部を有し、X線発生器及とX線検出器の間(開口部)に被検体を挿入して撮影が行なわれる。そして、開口部への被検体の挿入は、開口部の近傍に配置される寝台装置の天板上に被検体を載置し、その天板を開口部内に移動することによって行なわれる。
【0004】
ところで、MRI装置を用いた撮影の場合、天板を移動する機構部を寝台装置に設け、その機構部を用いて寝台装置から離れた開口部内に天板を設定する寝台装置が知られている(例えば、特許文献1参照。)。
【0005】
また、被検体の全身または全身に近い広領域の撮影用に、上下2段の天板を配置した寝台装置がある。この寝台装置の上段の天板上に被検体を載置し、上下2段の天板を揃えて天板の長手方向に水平移動して被検体を撮影位置に設定し、被検体を所望の位置に設定できない場合、更に上段の天板を手動で押し込んで設定している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−252260号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、天板を移動する機構部を設けた寝台装置の場合、天板に取り付けられた一部の機構部を除いた長さ以上に移動して天板を設定することができない。このため被検体の全身の撮影を行なおうとすると、天板を被検体の全身の長さに一部の機構部の分を加えた長さにする必要があるので、寝台装置が大型化してしまう問題がある。
【0008】
また、上下2段の天板を延ばす寝台装置の場合、上段の天板の移動を手動で行なうので手間が掛かる問題があり、仮に上段の天板も下段用と同様の駆動、ケーブルなどの機構を設けようとすると、2箇所に下段及び上段用の2系統の機構が必要になり装置の構成を複雑にする問題がある。
【0009】
加えて、天板を支持し移動駆動させる中間部と、天板と中間部とを支持し移動する寝台本体と、天板と中間部とを駆動する1つの駆動源とを備え、天板及び中間部を駆動源によって同時に異なる速度で移動させる寝台装置が開示されている(JP−A 2006−129938)。しかしながら、この寝台装置を有するMRI装置によると、天板の下側であって幅方向の中央位置に中間部を配置するので、受信信号や制御信号を伝達するための信号ケーブルを、中間部の両側に配置させることになる。その場合、送信用のWB(whole body)コイルが大型化してしまうという問題がある。また、X線CT装置及びPET装置などの画像診断装置においても、天板の下側であって幅方向の中央位置に電気配線等を配置させることができない。
【0010】
本発明は、上記問題点を解決するためになされたもので、大型化することなく簡単な機構で天板を離れた位置に設定することが可能な寝台装置及びMRI装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明に係る寝台装置は、上述した課題を解決するために請求項1に記載したように、少なくとも長手方向に移動する天板と、前記天板の下側に配置される寝台支持部と、前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記天板と同一方向に移動する中間部と、を有し、前記寝台支持部に対して前記中間部が移動する間に、前記天板と前記中間部との相対位置関係を変更させる構成とする。
【0012】
本発明に係る寝台装置は、上述した課題を解決するために請求項9に記載したように、少なくとも長手方向に移動する天板と、前記天板の下側に配置される寝台支持部と、前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する第1の中間部と、前記天板及び前記第1の中間部の間であって前記天板の幅方向の中央からずらした位置に配置され、前記長手方向に移動する第2の中間部と、を有し、前記寝台支持部に対して前記第1の中間部が移動する間に、前記天板と前記第1の中間部と前記第2の中間部との相対位置関係を変更させる構成とする。
【0013】
本発明に係る寝台装置は、上述した課題を解決するために請求項10に記載したように、少なくとも長手方向に移動する天板と、前記天板の下側に配置される寝台支持部と、前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する複数の中間部と、を有し、前記寝台支持部に対して前記複数の中間部のうち1つの中間部が移動する間に、前記天板と前記複数の中間部との相対位置関係を変更させる構成とする。
【0014】
本発明に係るMRI装置は、上述した課題を解決するために請求項11に記載したように、少なくとも長手方向に移動する天板と、前記天板の下側に配置される寝台支持部と、前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記天板と同一方向に移動する中間部と、を有し、前記寝台支持部に対して前記中間部が移動する間に、前記天板と前記中間部との相対位置関係を変更させる構成とする。
【0015】
本発明に係るMRI装置は、上述した課題を解決するために請求項20に記載したように、少なくとも長手方向に移動する天板と、前記天板の下側に配置される寝台支持部と、前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する第1の中間部と、前記天板及び前記第1の中間部の間であって前記天板の幅方向の中央からずらした位置に配置され、前記長手方向に移動する第2の中間部と、を有し、前記寝台支持部に対して前記第1の中間部が移動する間に、前記天板と前記第1の中間部と前記第2の中間部との相対位置関係を変更させる構成とする。
【0016】
本発明に係るMRI装置は、上述した課題を解決するために請求項21に記載したように、少なくとも長手方向に移動する天板と、前記天板の下側に配置される寝台支持部と、前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する複数の中間部と、を有し、前記寝台支持部に対して前記複数の中間部のうち1つの中間部が移動する間に、前記天板と前記複数の中間部との相対位置関係を変更させる構成とする。
【発明の効果】
【0017】
本発明に係る寝台装置及びMRI装置によると、一系統の簡単な機構を用いてミドルフレームを長手方向に水平移動すると共に天板をミドルフレームと同じ方向に移動し、天板を寝台支持部からミドルフレームよりも離れた位置に設定することができるので大型化を防ぐことができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施例1に係るMRI装置(寝台装置)の構成を示すブロック図。
【図2】本発明によるMRI装置の実施例1の概要を説明するための側面図。
【図3】本発明によるMRI装置の実施例1におけるA−A矢視図。
【図4】図1に示すRFコイル及びRF送受信部の構成の一例を示す図。
【図5】図4に示す被検体の体表側に設けられる表面コイルの配置例を示す図。
【図6】図4に示す被検体の背面側に設けられる表面コイルの配置例を示す図。
【図7】図4に示す被検体の体表側に設けられる表面コイルの別の配置例を示す図。
【図8】図4に示す被検体の背面側に設けられる表面コイルの別の配置例を示す図。
【図9】図1に示すRFコイル及びRF送受信部間の受信信号や制御信号を伝達するケーブルの配線の一例を示す側面図。
【図10】本発明の実施例1に係る天板の構成を示す図。
【図11】本発明の実施例1に係る天板の構成を示す図。
【図12】本発明の実施例1に係るミドルフレームの構成を示す図。
【図13】本発明の実施例1に係るミドルフレームの構成を示す図。
【図14】本発明の実施例1に係る水平移動機構部の構成を示す図。
【図15】本発明の実施例1に係る水平移動機構部の構成を示す図。
【図16】本発明の実施例1に係る水平移動機構部の構成の一例を前方から示す図。
【図17】本発明の実施例1に係る水平移動機構部の構成の一例を前方から示す図。
【図18】本発明の実施例1に係る上下移動機構部の構成を示す図。
【図19】本発明の実施例1に係るミドルフレーム及び天板の動作を示す図。
【図20】本発明の実施例1に係るミドルフレーム及び天板の動作を示す図。
【図21】本発明の実施例1に係る天板を移動する水平移動機構部の動作を説明するための図。
【図22】本発明の実施例1に係る天板を移動する水平移動機構部の動作を説明するための図。
【図23】本発明の実施例1に係る天板が移動可能な距離を説明するための図。
【図24】本発明の実施例2に係るMRI装置(寝台装置)の構成を示すブロック図。
【図25】本発明の実施例2に係る天板の構成を示す図。
【図26】本発明の実施例2に係る天板の構成を示す図。
【図27】本発明の実施例2に係るミドルフレームの構成を示す図。
【図28】本発明の実施例2に係るミドルフレームの構成を示す図。
【図29】本発明の実施例2に係る水平移動機構部の構成を示す図。
【図30】本発明の実施例2に係る水平移動機構部の構成を示す図。
【図31】本発明の実施例2に係る水平移動機構部の構成の一例を前方から示す図。
【図32】本発明の実施例2に係るミドルフレーム及び天板の動作を示す図。
【図33】本発明の実施例2に係るミドルフレーム及び天板の動作を示す図。
【図34】本発明の実施例2に係る天板を移動する水平移動機構部の動作を説明するための図。
【図35】本発明の実施例2に係る天板を移動する水平移動機構部の動作を説明するための図。
【発明を実施するための形態】
【0019】
本発明は、画像を形成するための撮影手段を有する架台を備えた画像診断装置として、例えばX線CT(computed tomography)装置、MRI(magnetic resonance imaging)装置、PET(positron emission tomography)装置、X線画像診断装置などに用いることができるが、ここではMRI装置に用いた場合について説明する。
【実施例1】
【0020】
以下、本発明によるMRI装置の実施例1を、図1乃至図23を参照して説明する。図1は、本発明の実施例1に係るMRI装置(寝台装置)の構成を示したブロック図である。
【0021】
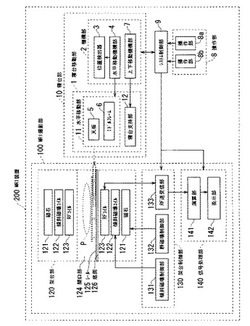
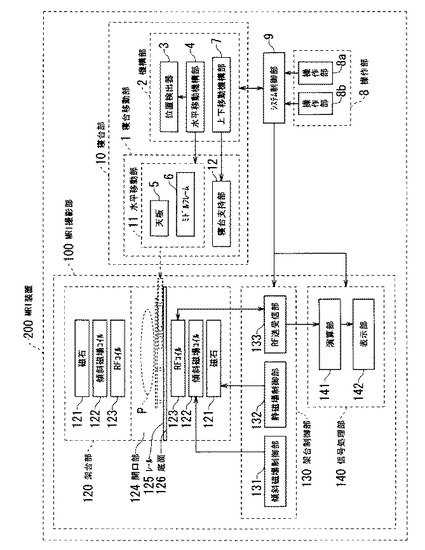
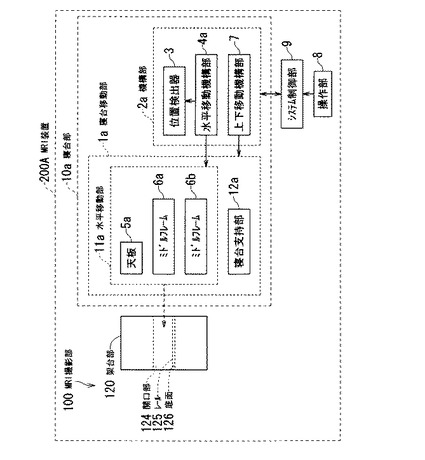
図1は、本発明の実施例1に係るMRI装置200を示す。そのMRI装置200は、被検体PのMRI撮影を行なうMRI撮影部100と、MRI撮影部100の撮影位置に被検体Pを設定するための寝台部10と、MRI撮影部100及び寝台部10を操作する操作部8と、操作部8からの信号に基づいてMRI撮影部100及び寝台部10を制御するシステム制御部9とを備えている。
【0022】
MRI撮影部100は、被検体Pに磁場を発生させる架台部120と、架台部120内部の磁場を制御する架台制御部130と、架台部120から出力された信号を処理して画像データを生成し表示する信号処理部140とを備えている。
【0023】
架台部120は、被検体Pの撮影を行なうための開口部124が形成され、この開口部124の底面126には寝台部10の一部を導くためのレール125が設けられている。架台部120内部には、静磁場発生用の磁石121と、静磁場に位置情報を付加するために傾斜磁場を発生する傾斜磁場コイル122と、高周波信号を送受信するRF(radio frequency)コイル123とが配置されている。
【0024】
磁石121は、架台部120内周に配置され、例えば超伝導方式により、開口部124内に設定された被検体Pに静磁場を発生する。この時、磁石121の静磁場電源(図示せず)は架台制御部130によって制御される。
【0025】
傾斜磁場コイル122は、磁石121の内周に配置され、開口部124内の被検体Pに傾斜磁場を発生する。この時、傾斜磁場コイル122の傾斜磁場電源(図示せず)は架台制御部130によって制御される。
【0026】
RFコイル123は、傾斜磁場コイル122と被検体Pの間に配置され、被検体P内部の水素原子核を励起するために高周波磁場を照射すると共に、被検体Pから放出される核磁気共鳴信号を受信し、架台制御部130に出力する。
【0027】
架台制御部130は、傾斜磁場制御部131、静磁場制御部132及びRF送受信部133により構成されている。そして、傾斜磁場制御部131は傾斜磁場コイル122に供給する傾斜磁場を制御し、静磁場制御部132は磁石121に供給する静磁場電源を制御する。
【0028】
また、RF送受信部133はRFコイル123への高周波を送信する送信回路と、RFコイル123からの信号を受信し信号処理を施す受信回路と、送信回路と受信回路を制御するRFシーケンサを備え、受信回路から出力された信号を信号処理部140に送る。
【0029】
信号処理部140は、演算部141と表示部142とを備えている。そして、演算部141は、架台制御部130のRF送受信部133から送られてきた信号を画像処理して画像データを生成し、その画像データをCRT(cathode ray tube)などの表示部142に表示する。
【0030】
寝台部10は、被検体Pが載置される寝台移動部1と、この寝台移動部1を水平方向及び上下方向に移動して、MRI撮影部100の架台部120の開口部124内に被検体Pを設定する機構部2とを備えている。
【0031】
寝台移動部1は、水平移動部11と、水平移動部11を支持する寝台支持部12とを備えている。さらに、水平移動部11は、被検体Pを載置するための天板5と、その天板5をMRI撮影部100の開口部124に移動するために天板5と寝台支持部12との間に設けられる中間部(ミドルフレーム)6とを有する。
【0032】
機構部2は、水平移動部11を水平移動する水平移動機構部4と、水平移動部11の位置を検出する位置検出器3と、寝台移動部1を上下移動する上下移動機構部7とを備えている。
【0033】
操作部8は、図示しないキーボードなどの入力デバイスや表示パネルなどを有する。操作部8は、MRI撮影を行なうための撮影条件の入力などによるMRI撮影部100の操作や、天板5上に載置された被検体Pを架台部120の開口部124に設定するための入力などによる寝台部10の操作を行なう操作部8aと、寝台部10だけの操作を行なう操作部8bとを備えている。そして、架台部120の開口部124に寝台部10の天板5に載置された被検体Pを移動する際に、被検体Pの近くでの操作が可能なように、操作部8bは架台部120に配置される。
【0034】
システム制御部9は、図示しないCPU(central processing unit)や記憶回路などを有し、操作部8からの入力信号に基づいて、MRI撮影部100の架台制御部130及び信号処理部140のMRI撮影に関する制御や、寝台部10の機構部2の移動動作に関する制御などシステム全体の制御を行なう。
【0035】
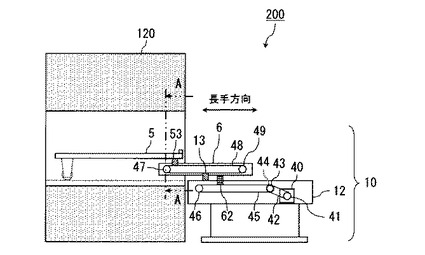
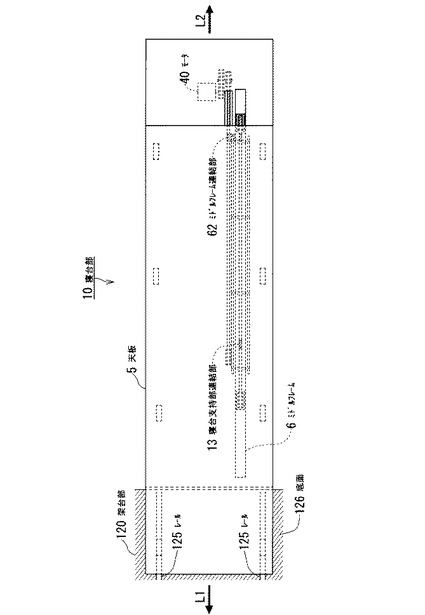
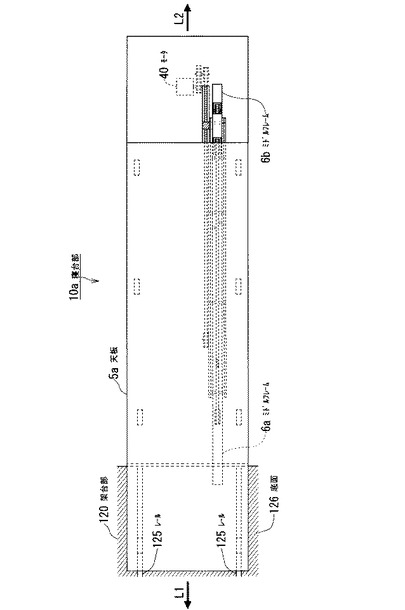
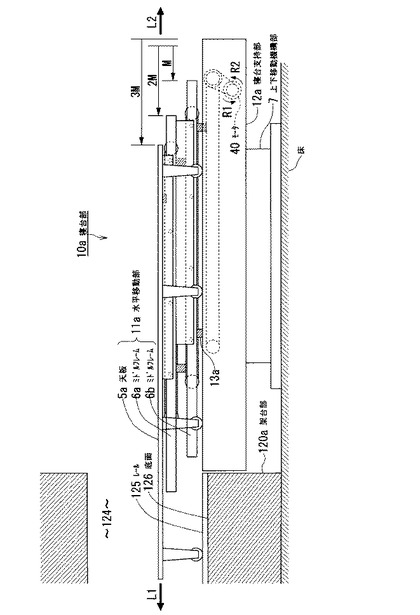
図2は、MRI装置200の側面図である。なお、図2に示したMRI装置200では、各構成要素を説明し易くするために、便宜的に相対的なサイズを変更している。
【0036】
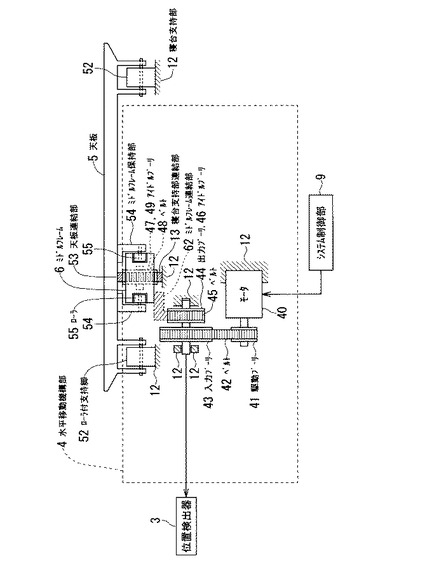
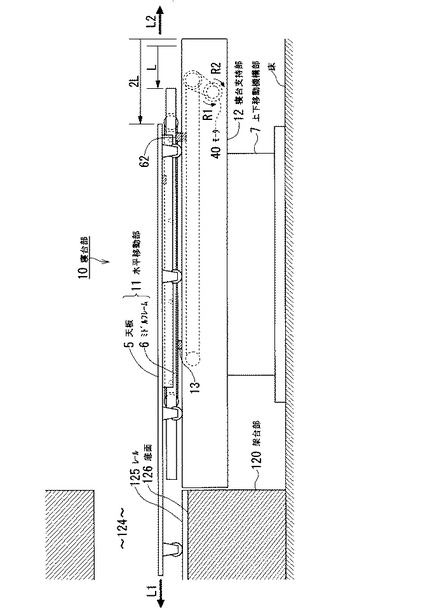
図2には、MRI装置200の架台部120と寝台部10とを示している。寝台部10は、少なくとも長手方向(図2では左右方向)に移動する天板5と、その天板5の下側に配置される寝台支持部12と、天板5及び寝台支持部12の間に配置され、長手方向に移動するミドルフレーム6とを有する。そして、寝台部10は、寝台支持部12に対してミドルフレーム6が移動する間に、天板5とミドルフレーム6との相対位置関係を変更させる。また、天板5の長手方向の長さは、ミドルフレーム6の長手方向の長さと比較して長い構成とする。
【0037】
また、寝台支持部12は第1の移動機構とその第1の移動機構を動作させる駆動機構とを保持すると共に、第1の移動機構と連結されたミドルフレーム6は天板5と連結された第2の移動機構を保持する。そして、駆動機構の駆動によって第1の移動機構を動作させ、ミドルフレーム6を移動させ、第2の移動機構を動作させることによって、天板5をミドルフレーム6と同一方向に移動させる。
【0038】
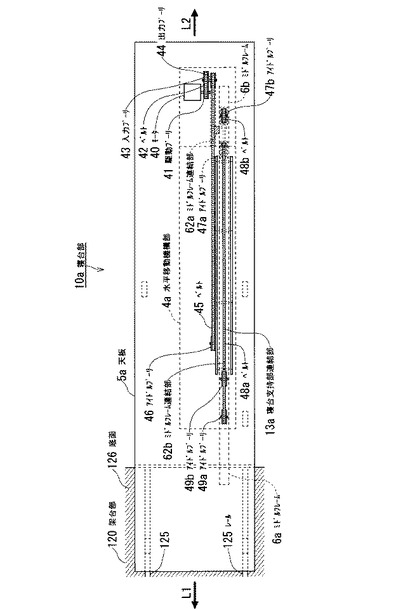
例えば、寝台支持部12は、駆動機構として、モータ40と、モータ40の駆動に連動して回転する駆動プーリ41と、入力プーリ43と、駆動プーリ41及び入力プーリ43を両端として回転するベルト42とを有する。さらに、寝台支持部12は、第1の移動機構として、入力プーリ43の回転に連動して回転する出力プーリ44と、アイドルプーリ46と、出力プーリ44及びアイドルプーリ46を両端として回転するベルト45とを有する。また、第1の移動機構と連結されたミドルフレーム6は、第2の移動機構として、アイドルプーリ47,49と、アイドルプーリ47,49を両端として回転するベルト48とを有する。
【0039】
モータ40の駆動を駆動させると、駆動プーリ41、ベルト42及び入力プーリ43が動作され、出力プーリ44が回転する。出力プーリ44の回転に従って、ベルト45が、出力プーリ44及びアイドルプーリ46周りに回転する。ベルト45の回転に従って、ベルト45の一部とミドルフレーム6の一部との連結部である中間部連結部62が長手方向に移動する。中間部連結部62の移動に従って、ミドルフレーム6が中間部連結部62と同一方向に移動する。ミドルフレーム6の移動に従って、ミドルフレーム6によって保持されるベルト48がアイドルプーリ47,49周りを回転する。ベルト48の回転に従って、ベルト48の一部と天板5の一部との連結部である天板連結部53がミドルフレーム6と同一方向に移動する。天板連結部53の移動に従って、天板5が天板連結部53と同一方向に移動する。なお、ベルト48の一部と寝台支持部12の一部とは寝台支持部連結部13によって連結(支持)される。
【0040】
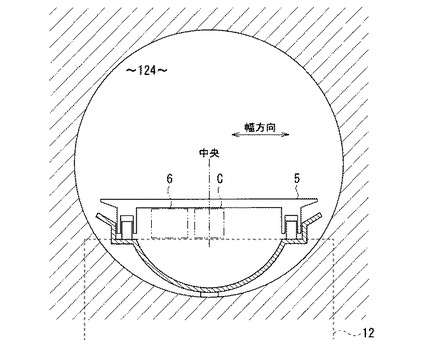
図3は、MRI装置200のA−A矢視図である。
【0041】
図3は、図2に示した側面図のA−A矢視図である。ミドルフレーム6は、架台部120の開口部124に導かれる天板5と寝台支持部12との間であって天板5の幅方向の中央に重ならない位置に配置され、長手方向に移動される。また、天板5及び寝台支持部12の間であって天板5の幅方向の中央に重なる位置に、撮影部(MRI装置200ではMRI撮影部100)からの受信信号及び撮影部への制御信号のうち少なくとも一方を伝達する伝達部であるケーブル(ケーブル群)Cを配置する。そのケーブルCは天板5の下部によって保持される。ここで、天板5の幅方向の中央に重ならない位置とは、一般的に天板5の幅方向の中央に重なる位置に配置されるケーブルC等の配置を妨げないような位置を意味する。
【0042】
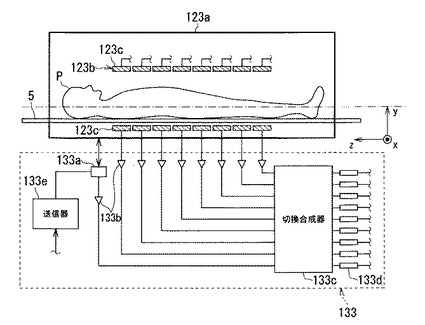
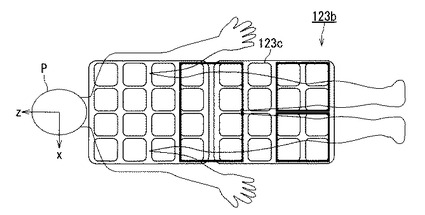
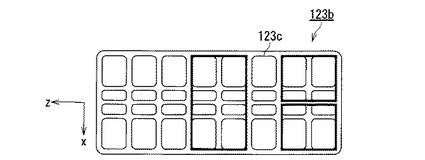
図4は、図1に示すRFコイル123及びRF送受信部133の構成の一例を示す図であり、図5は、図4に示す被検体Pの体表側に設けられる表面コイル123cの配置例を示す図、図6は、図4に示す被検体Pの背面側に設けられる表面コイル123cの配置例を示す図である。
【0043】
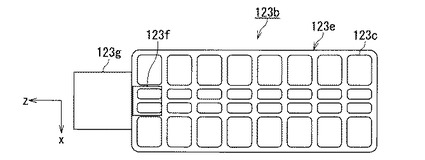
図4に示すようにRFコイル123は、筒状であり全身用の(WB:whole body)コイル123aとフェーズドアレイコイル123bを備えている。フェーズドアレイコイル123bは、複数の表面コイル123cを備えており、被検体Pの体表側と背面側とにそれぞれ複数の表面コイル123cが配置される。
【0044】
例えば図5に示すように被検体Pの体表側には、広範囲の撮影部位がカバーされるようにx軸方向(幅方向)に4列、z軸方向(長手方向)に8列の合計32個の表面コイル123cが配置される。また、図6に示すように被検体Pの背面側にも同様に広範囲の撮影部位がカバーされるようにx軸方向に4列、z軸方向に8列の合計32個の表面コイル123cが配置される。背面側では、被検体Pの背骨の存在を考慮した感度向上の観点から、体軸付近に他の表面コイル123cよりも小さい表面コイル123cが配置される。
【0045】
一方、図4に示すRF送受信部133は、デュプレクサ133a,アンプ133b、切換合成器133c、受信系回路133d及び送信器133eを備えている。デュプレクサ133aは、送信器133e、WBコイル123a及びWBコイル123a用のアンプ133bと接続される。アンプ133bは、WBコイル123a及び各表面コイル123cの数だけ設けられ、それぞれ個別にWBコイル123a及び各表面コイル123cと接続される。切換合成器133cは、単一又は複数個設けられ、切換合成器133cの入力側は、複数のアンプ133bを介してWBコイル123a又は各表面コイル123cと接続される。受信系回路133dは、WBコイル123a及び各表面コイル123cの数以下となるように所望の数だけ設けられ、切換合成器133cの出力側に設けられる。
【0046】
WBコイル123aは、高周波信号の送信用のコイルとして用いることができる。また、NMR(nuclear magnetic resonance)信号の受信用のコイルとして各表面コイル123cを用いることができる。さらに、WBコイル123aを受信用のコイルとして用いることもできる。
【0047】
このため、デュプレクサ133aは、送信器133eから出力された送信用の高周波信号をWBコイル123aに与える一方、WBコイル123aにおいて受信されたNMR信号をRF送受信部133内のアンプ133bを経由して切換合成器133cに与えるように構成されている。また、各表面コイル123cにおいて受信されたNMR信号もそれぞれ対応するアンプ133bを経由して切換合成器133cに出力されるように構成されている。
【0048】
切換合成器133cは、WBコイル123aや各表面コイル123cから受けたNMR信号の合成処理及び切換を行なって、対応する受信系回路133dに出力するように構成されている。換言すれば、受信系回路133dの数に合わせてWBコイル123aや各表面コイル123cから受けたNMR信号の合成処理及び切換が切換合成器133cにおいて行なわれ、所望の複数の表面コイル123cを用いて撮影部位に応じた感度分布を形成して様々な撮影部位からのNMR信号を受信できるように構成されている。
【0049】
ただし、表面コイル123cを設けずに、WBコイル123aのみでNMR信号を受信するようにしてもよい。また、切換合成器133cを設けずに、WBコイル123aや各表面コイル123cによって受信されたNMR信号を直接に受信系回路133dに出力するようにしてもよい。さらに、より多くの表面コイル123cを広範囲に亘って配置することもできる。
【0050】
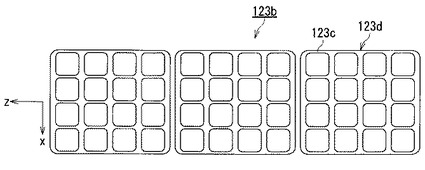
図7は、図4に示す被検体Pの体表側に設けられる表面コイル123cの別の配置例を示す図、図8は、図4に示す被検体Pの背面側に設けられる表面コイル123cの別の配置例を示す図である。
【0051】
図7,8に示すようにさらに多くの表面コイル123cを被検体Pの周囲に配置することができる。図7に示す例では、x軸方向に4列、z軸方向に4列の16要素の表面コイル123cで構成されるコイルユニット123dがz軸方向に3つ配置されているため合計48要素の表面コイル123cが被検体Pの体表側に設けられることとなる。また、図8に示す例では、x軸方向に4列、z軸方向に8列の32要素の表面コイル123cで構成されるコイルユニット123eが背骨側に、図示しない2要素の表面コイル123cを備えたコイルユニット123fが顎付近に、図示しない12要素の表面コイル123cを備えたコイルユニット123gが頭部にそれぞれは位置されるため、合計46要素の表面コイル123cが被検体Pの背面側に設けられることとなる。そして、図7及び図8に示すように被検体Pの体表側及び背面側に表面コイル123cを配置すれば、合計94要素の表面コイル123cが被検体Pの周囲に配置されることとなる。各表面コイル123cは、図示しないコイルポートを経由してそれぞれ専用のアンプ133bと接続される。
【0052】
そして、表面コイル123cを多数被検体Pの周囲に配置することによって、コイルや被検体Pの位置を移動させることなく複数の撮影部位からのデータを受信することが可能な全身用のフェーズドアレイコイル123bを形成することが可能となる。WBコイル123aもコイルや被検体Pの位置を移動させることなく複数の撮影部位からのデータを受信することが可能であるが、全身用のフェーズドアレイコイル123bを受信用のコイルとして用いれば、より撮影部位に適した感度及びより良好なSNR(signal to noise ratio)でデータを受信することが可能となる。
【0053】
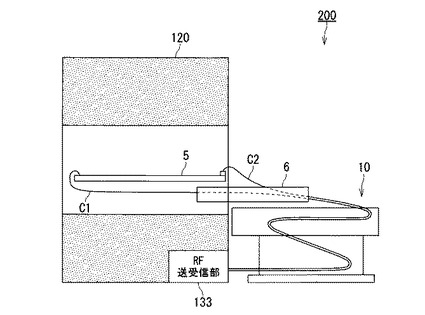
図9は、図1に示すRFコイル123及びRF送受信部133間の受信信号や制御信号を伝達するケーブルCの配線の一例を示す側面図である。
【0054】
図9に示すように、天板5の頭部側(図9では左側)から延びるケーブルC1や下肢部側(図9では右側)から延びるケーブルC2は、天板5の下側であってミドルフレーム6の側方から寝台部10を経由してRF送受信部133に接続される。なお、図9では便宜上、2本のケーブルC1,C2のみを図示するが、ケーブルCを3本以上有する場合であっても、全てのケーブルCは、天板5の下側であってミドルフレーム6の側方から寝台部10を経由してRF送受信部133に接続される。
【0055】
次に、図10乃至図18を参照して、寝台部10の寝台移動部1及び機構部2の構成の詳細を説明する。
【0056】
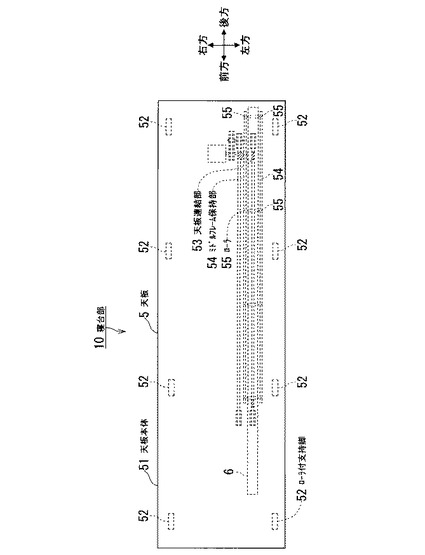
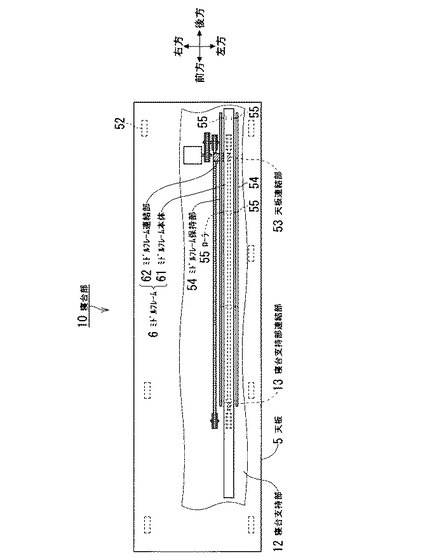
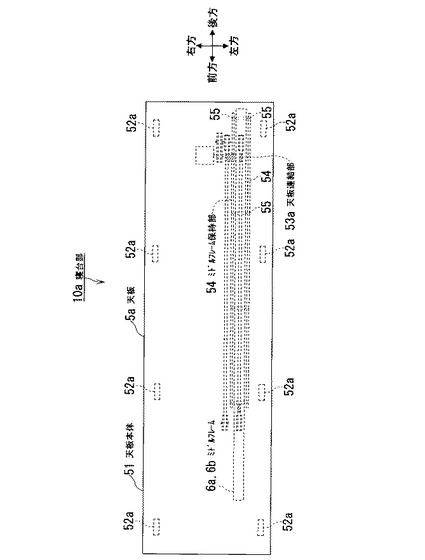
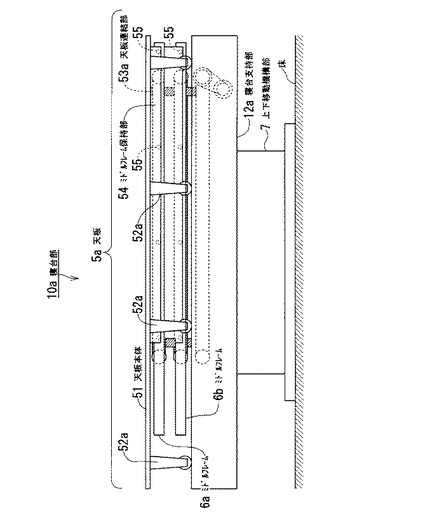
図10及び図11は、寝台移動部1の水平移動部11における天板5の構成の詳細を示した図である。図10は寝台部10を上方から見た図であり、図11は寝台部10の側面図である。そして、図10及び図11は、寝台部10のホームポジションにおける天板5の位置を示している。以下の説明においては、図10及び図11に示した寝台部10の左側を前方、右側を後方、上側を右方、及び下側を左方と呼ぶことにする。
【0057】
天板5は、被検体Pが載置される長方形の天板本体51と、天板本体51を前方及び後方の長手方向への移動を円滑に行なうためのローラ付支持脚52と、水平移動機構部4からの駆動力を天板本体51に伝達する天板連結部53と、ミドルフレーム6を保持する2つのミドルフレーム保持部54とにより構成される。
【0058】
ローラ付支持脚52は、天板本体51下面の長辺側両端部近傍の全体に亘って、一定の間隔で複数配置されている。このローラ付支持脚52によって、天板本体51は寝台支持部12上を長手方向に円滑に移動することができる。また、MRI撮影部100の架台部120における開口部124では、レール125上を長手方向に円滑に移動することができる。
【0059】
天板連結部53は、天板本体51の下面の後方の端部近傍に配置され、天板本体51と水平移動機構部4の一部とを連結している。そして、水平移動機構部4から伝達される駆動力を天板本体51に伝達し、天板5をホームポジションから前方に移動させる。
【0060】
2つのミドルフレーム保持部54は、複数のローラ55を軸支するため、天板本体51の下面の天板連結部53の左右に平行に離間して配置され固定されている。そして、平行に配置された対向側の面には夫々ミドルフレーム6に係合する複数のローラ55が配置され、ローラ55を介してミドルフレーム6を長手方向に移動可能に保持している。
【0061】
上記構成を有する寝台部10の天板本体51の上に被検体Pが載置され水平移動機構部4が駆動されると、ミドルフレーム6および天板連結部53を介して天板本体51が駆動され、ローラ付支持脚52の回転によって寝台支持部12上を長手方向(前後方向)に円滑に移動することができる。
【0062】
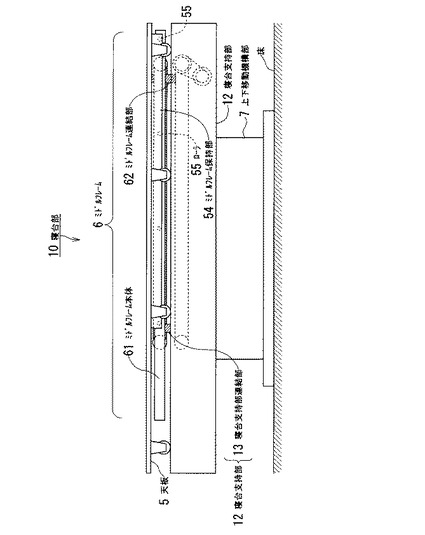
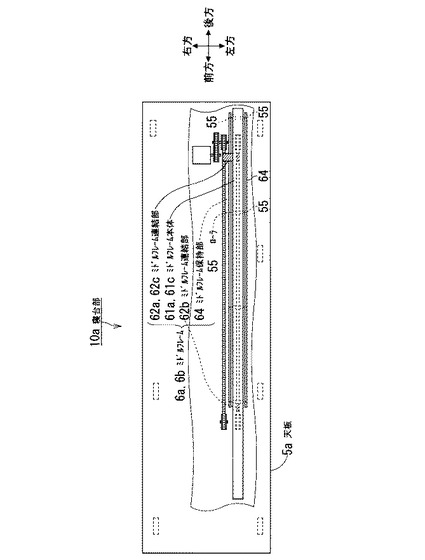
図12及び図13は、水平移動部11のミドルフレーム6の構成の詳細を示した図である。図12は寝台部10の上部の切欠き図であり、図13は寝台部10の側面図である。そして、図12及び図13は、寝台部10のホームポジションにおけるミドルフレーム6の位置を示している。
【0063】
ミドルフレーム6は、天板5と寝台支持部12の間に形成される空間に設けられ、天板5の下側に配置されるミドルフレーム本体61と、水平移動機構部4からの駆動力をミドルフレーム本体61に伝達するミドルフレーム連結部62とにより構成される。
【0064】
ミドルフレーム本体61は、天板5の下面の長手方向に沿って平行に配置され、前方端部が天板5の前方端部よりも後方に位置し、後方端部が天板5の後方端部よりも前方の端部近傍に位置している。そして、図16に示すように、天板5の巾方向における鉛直方向の断面がI形(又は、T形等)を形成し、そのI形の両側に天板5のミドルフレーム保持部54におけるローラ55が係合している。
【0065】
ミドルフレーム連結部62は、図16に示すように、ミドルフレーム本体61の下面の後方端部よりも前方にあって、天板5の天板連結部53の右斜め下に配置され、ミドルフレーム本体61と水平移動機構部4の一部とを連結している。そして、水平移動機構部4から伝達される駆動力をミドルフレーム本体61に伝達し、ミドルフレーム本体61をホームポジションから前方に移動させる。
【0066】
寝台支持部12は、天板5のローラ付支持脚52が載置され、天板本体51とほぼ同じ長方形の上面を形成している。そして、水平移動機構部4からの駆動力をミドルフレーム6及び天板5に伝達するための寝台支持部連結部13を備え、天板5を長手方向へ水平移動可能に支持している。
【0067】
寝台支持部連結部13は、ミドルフレーム本体61の前方端部よりも後方に配置され、寝台支持部12と水平移動機構部4の一部とを連結している。そして、水平移動機構部4からの駆動力をミドルフレーム本体61に伝達するために設けられている。
【0068】
なお、天板5のローラ付支持脚52の高さを低くして天板5の位置を下げ、寝台支持部12の上面のローラ付支持脚52との接触面の内側の面を下げて、その下げた面に接触しないようにミドルフレーム6を収納する構造にするようにしてもよい。これにより、寝台移動部1の小型化が可能となる。
【0069】
また、ミドルフレーム6の巾方向における長さを拡大し、その拡大したミドルフレーム6に天板5に設けたローラ付支持脚52を配置し、そのミドルフレーム6で長手方向に移動可能に天板5を支持すると共に、そのミドルフレーム6を長手方向に移動可能に寝台支持部12で支持するようにしてもよい。また、天板5及びミドルフレーム6にローラ付支持脚52を配置し、天板5及びミドルフレーム6を寝台支持部12で長手方向に移動可能に支持するようにしてもよい。
【0070】
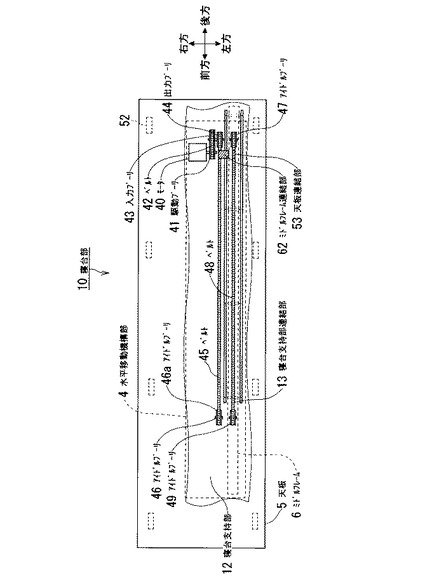
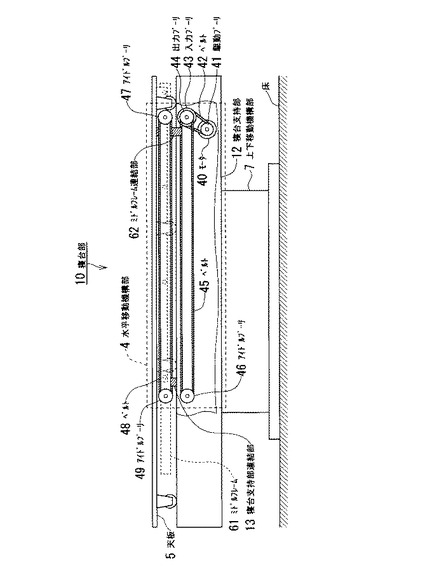
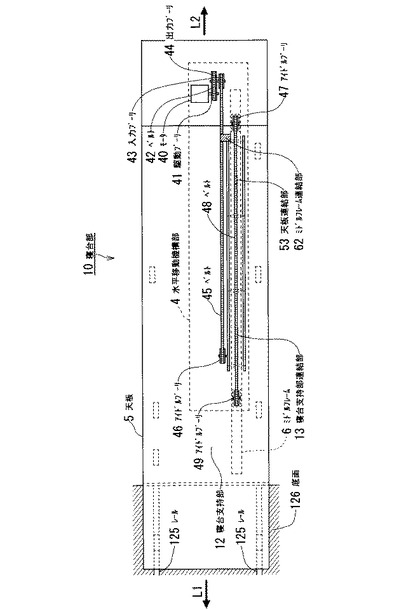
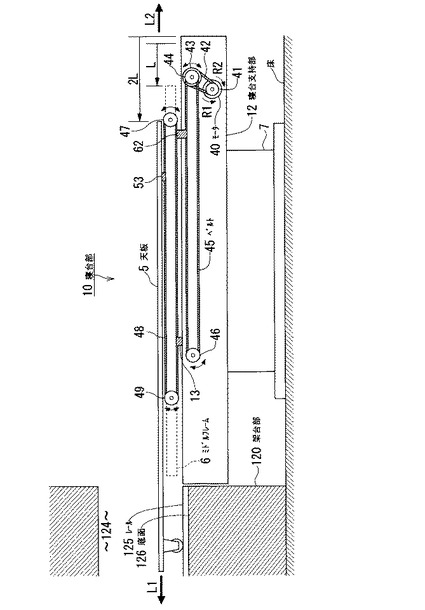
図14乃至図17は、機構部2の水平移動機構部4の構成の詳細を示した図である。図14は、寝台部10の上部を上方から見て水平移動機構部4を抽出した構成図であり、図15は寝台部10の側部を左方から見て水平移動機構部4を抽出した構成図である。そして、図14及び図15は、寝台部10のホームポジションにける水平移動機構部4を示している。図16は、寝台部10を前方から見た場合の水平移動機構部4の一例を示す構成図である。
【0071】
水平移動機構部4は、寝台支持部12及びミドルフレーム6に配置される。また、水平移動機構部4は、寝台支持部12に保持される。寝台支持部12に配置される水平移動機構部4の機構は、水平移動部11を駆動して天板5を移動させるための動力源としてのモータ40と、このモータ40の駆動力をベルト42に伝達する駆動プーリ41と、ベルト42からの駆動力を出力プーリ44に伝達する駆動プーリ41と対の入力プーリ43と、出力プーリ44からの駆動力をミドルフレーム6に伝達するベルト45と、ベルト45が巻回される出力プーリ44及この出力プーリ44と対のアイドルプーリ46とにより構成される。
【0072】
また、ミドルフレーム6に配置される水平移動機構部4の機構は、ミドルフレーム6に伝達されたベルト45からの駆動力を天板5に伝達するベルト48と、このベルト48が巻回される一対のアイドルプーリ47,49とにより構成される。
【0073】
そして、対をなす駆動プーリ41と入力プーリ43およびその間のベルト42、対をなす出力プーリ44とアイドルプーリ46およびその間のベルト45、及び対をなすアイドルプーリ47,49およびその間のベルト48には、駆動力を伝達するために夫々噛み合い歯が形成されている。なお、アイドルプーリ46,49および出力プーリ44とアイドルプーリ47は、ホームポジションでは同じ位置に配置されており、また下段のベルト45と上段のベルト48は同じ長さを有している。
【0074】
モータ40は、寝台支持部12に固定されている。そして、システム制御部9によりモータ40の回転数、回転方向、及び回転速度などが制御される。ベルト42は、モータ40の回転軸に固定された駆動プーリ41及び入力プーリ43に巻回されており、モータ40の駆動力を、駆動プーリ41及びベルト42を介して入力プーリ43に伝達する。
【0075】
駆動プーリ41よりも多い歯数を有する入力プーリ43は、その回転軸が寝台支持部12の巾方向に平行で水平になるようにミドルフレーム6のミドルフレーム連結部62の後方の近傍に配置され、寝台支持部12に回転可能に保持されている。そして、ベルト42からの駆動力を出力プーリ44に伝達し、入力プーリ43と共有の回転軸を有する出力プーリ44は、入力プーリ43と同じ方向に同じ回転数だけ回転し、入力プーリ43からの駆動力をベルト45に伝達する。
【0076】
ベルト45は、寝台支持部12の長手方向に平行に且つ上側及び下側のベルト面が水平になるように配置され、出力プーリ44とアイドルプーリ46との間に巻回されている。また、出力プーリ44近傍のベルト45の上側の一部とミドルフレーム本体61とがミドルフレーム連結部62で連結されている。そして、出力プーリ44からの駆動力を、ミドルフレーム連結部62を介してミドルフレーム本体61に伝達して、ミドルフレーム6を長手方向に水平移動させる。
【0077】
ベルト48は、ミドルフレーム本体61の長手方向の上面及び下面の近傍に上側及び下側のベルト面が水平になるように配置され、ミドルフレーム6に回転移動可能に保持されたアイドルプーリ47,49に巻回されている。また、アイドルプーリ47の近傍のベルト48の上側の一部と天板5とが天板連結部53で連結され、アイドルプーリ49の近傍のベルト48の下側の一部と寝台支持部12とが寝台支持部連結部13で連結されている。そして、ベルト45からミドルフレーム本体61に伝達された駆動力を、寝台支持部連結部13及び天板連結部53を介して天板本体51に伝達して、天板5をミドルフレーム6と同じ方向に水平移動させる。
【0078】
位置検出器3は、図16に示すように、水平移動機構部4の入力プーリ43に設けられ、エンコーダなどを用いて入力プーリ43の回転方向及び回転数を検出してシステム制御部9に出力する。システム制御部9は、位置検出器3からの出力信号に基づいて水平移動機構部4のモータ40を制御して、天板5の位置を設定する。
【0079】
このように構成された水平移動機構部4は、一系統の簡単な構成で水平移動部11のミドルフレーム6を長手方向に水平移動すると共に、天板5をミドルフレーム6と同じ方向に水平移動することができる。
【0080】
図17は、寝台部10を前方から見た場合の水平移動機構部4の他の例を示す構成図である。
【0081】
図17に示した構成図は、図16に示した構成図の他の例を示す。図17に示した構成では、ミドルフレーム6がミドルフレーム保持部54を介して寝台支持部12によって移動できるように保持される点が図16に示した構成と異なる。図17に示した構成図の場合、図16に示した構成図の場合と比較して、ミドルフレーム6が床に固定された寝台支持部12に保持されるので、ミドルフレーム6の保持が安定する。
【0082】
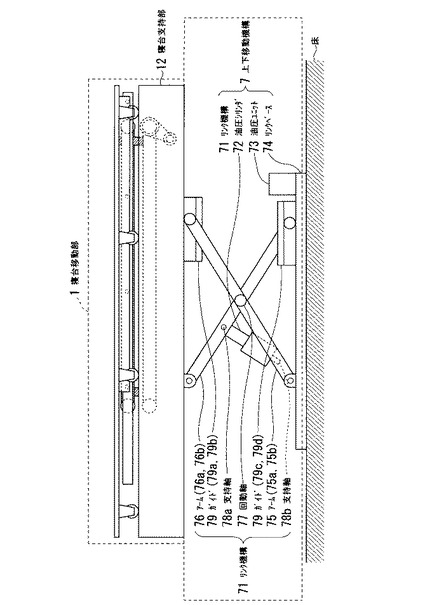
図18は、上下移動機構部7の構成の詳細を示した側面図である。この上下移動機構部7は、寝台移動部1の寝台支持部12と床との間に配置され、寝台移動部1を上下移動するリンク機構71と、リンク機構71を油圧シリンダ72を介して駆動する油圧ユニット73と、リンク機構71及び油圧ユニット73を支持する長方形のリンクベース74とを備えている。
【0083】
リンク機構71は、4つのアーム75(75a,75b)及び76(76a,76b)と、アーム75及び76の回動軸77と、油圧シリンダ72を支持する2つの支持軸78(78a,78b)と、アーム75及び76の端部を保持する4つのガイド79(79a乃至79d)とを備えている。
【0084】
アーム75は、同じ長さのアーム75a及び75b(図18では、アーム75aの背面に隠れている)から構成され、リンクベース74の巾方向の両端部に夫々一端が回動可能に保持されている。また、夫々他端が寝台支持部12の下面の巾方向の両端部に設けられたガイド79のガイド79a及び79b(図18では、ガイド79aの背面に隠れている)に水平方向にスライド可能に保持されている。
【0085】
アーム76は、アーム75a及び75bと同じ長さで、その中央部で交差するアーム76a及び76b(図18では、アーム76aの背面に隠れている)から構成される。そして、アーム76a及び76bの一端は、アーム75a及び75bの一端の上方に位置し、寝台支持部12の下面に回動可能に保持されている。また、アーム76a及び76bの他端は、アーム75a及び75bの他端の下方に位置し、リンクベース74上に配置されたガイド79のガイド79c及び79d(図18では、ガイド79cの背面に隠れている)に水平方向にスライド可能に保持されている。
【0086】
回動軸77は、アーム75a及び76aの交差部分に形成された穴に一端が遊嵌し、他端がアーム75b及び76bの交差部分に形成された穴に遊嵌して保持されている。
【0087】
支持軸78は、水平に配置された支持軸78a及び78bから構成され、アーム76aのアーム75aとの交差部分の上方に支持軸78aの一端が固定され、他端がアーム76bのアーム75bとの交差部分の上方に固定されている。
【0088】
また、支持軸78の支持軸78bは、アーム75aのアーム76aとの交差部分の下方に一端が固定され、他端がアーム75bのアーム76bとの交差部分の下方に固定されている。
【0089】
油圧シリンダ72は、リンク機構71の支持軸78a及び78bの中央部に一端及び他端が伸縮自在に保持されている。
【0090】
油圧ユニット73は、油圧シリンダ72へ圧油を送る油圧ポンプ、切換弁(図示せず)などを備え、油圧シリンダ72の長さを調整する。
【0091】
このように構成された上下移動機構部7は、システム制御部9の制御により、油圧ユニット73に油圧シリンダ72を伸縮させてリンク機構71の支持軸78a及び支持軸78bを駆動し、その駆動力によりアーム75及び76の夫々一端部が回動軸77を軸として回動すると共に、他端がガイド79をスライドして、寝台移動部1を上下方向に移動する。
【0092】
次に、図1乃至図22を参照して、寝台部10の動作を説明する。
【0093】
寝台部10の天板5にMRI撮影部100でMRI撮影をする被検体Pが載置された後、操作部8から寝台移動部1の上下位置設定操作が行なわれると、システム制御部9は、上下移動機構部7を制御して、寝台移動部1の寝台支持部12の上面がMRI撮影部100の架台部120の開口部124に設けられたレール125の高さに一致する位置に寝台移動部1を設定する。
【0094】
そして、開口部124内の撮影位置に被検体Pを移動するために、操作部8から天板位置設定操作が行なわれると、システム制御部9は、水平移動機構部4を制御して水平移動部11を移動して天板5を開口部124の撮影位置に設定する。また、MRIの撮影が終了した後、操作部8から天板ホームポジション操作が行なわれると、水平移動部11を寝台支持部12のホームポジションに水平移動する。
【0095】
図19及び図20は、開口部124の撮影位置に移動する天板5を示した図である。天板5をホームポジションから例えば矢印L1方向に距離2Lを移動させる操作が操作部8から行なわれると、システム制御部9は、水平移動機構部4に天板5の位置設定を指示する。
【0096】
水平移動機構部4は、システム制御部9の指示により、モータ40を矢印R1方向に回転させることにより、水平移動部11をホームポジションからL1方向へ水平移動する。そして、ホームポジションから、ミドルフレーム6を距離L離れた位置に設定し、天板5を開口部124のレール125及び寝台支持部12上の距離2L離れた位置に設定する。
【0097】
また、操作部8から天板ホームポジション操作が行なわれると、モータ40を矢印R2方向に回転させることにより、水平移動部11をL2方向へ水平移動して元のホームポジションに設定する。
【0098】
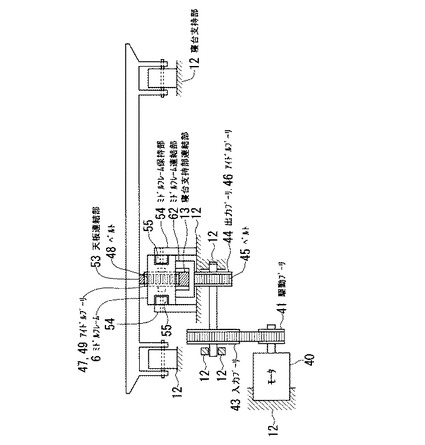
図21及び図22は、水平移動部11をL1方向へ移動する際の水平移動機構部4の動作を説明するための図である。図21は、寝台部10の上部を上方から見た図であり、図22は寝台部10の側部を左方から見た図である。
【0099】
寝台支持部12に配置される水平移動機構部4の機構では、モータ40をR1方向に回転させることにより、駆動プーリ41及びベルト42を介して、入力プーリ43及び出力プーリ44をR1方向に回転させる駆動力が伝達される。この出力プーリ44の駆動力は、ベルト45をL1方向に移動させる駆動力として伝達される。
【0100】
ミドルフレーム6に配置される水平移動機構部4の機構では、ベルト45の駆動力により、ミドルフレーム連結部62を介してベルト45と連結されたミドルフレーム本体61にミドルフレーム6をL1方向に移動させる駆動力が伝達される。このミドルフレーム本体61の駆動力により、ミドルフレーム本体61に保持されたアイドルプーリ47,49にL1方向への駆動力が伝達される。
【0101】
このアイドルプーリ47,49の駆動力により、アイドルプーリ47,49に巻回されているベルト48にL1方向への駆動力が伝達される。しかしながら、ベルト48は、寝台支持部連結部13を介して寝台支持部12と連結されているので、アイドルプーリ47,49をR1方向に回転させてベルト48をL1方向に移動させる駆動力として伝達される。
【0102】
そして、ベルト48の駆動力により、天板連結部53を介してベルト48と連結された天板本体51に天板5をL1方向に移動する駆動力が伝達され、天板5はL1方向に移動することができる。
【0103】
次に、ミドルフレーム6及び天板5の移動距離について説明する。モータ40のR1方向への所定の回転数により、ベルト45の上側のほうがL1方向に距離Lを移動すると、ミドルフレーム連結部62を介してベルト45と連結されたミドルフレーム本体61も距離Lを移動する。そして、ミドルフレーム6の移動により、ベルト48の上側がL1方向に距離Lを移動し、天板連結部53を介してベルト48と連結された天板5はミドルフレーム本体61上でL1方向に距離Lを移動する。
【0104】
即ち、ミドルフレーム本体61がL1方向に距離Lを移動する間に、天板5は、ミドルフレーム本体61上を距離L移動する。これにより、天板5は、寝台支持部12に対してミドルフレーム本体61の倍の速度で、ミドルフレーム本体61と同じ方向に2倍の距離2Lを移動し、寝台支持部12からミドルフレーム本体61よりも離れた位置に設定される。
【0105】
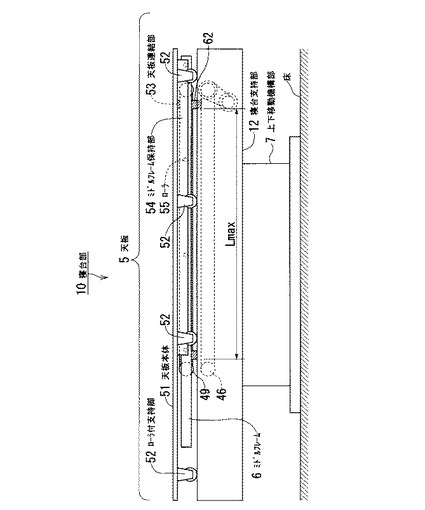
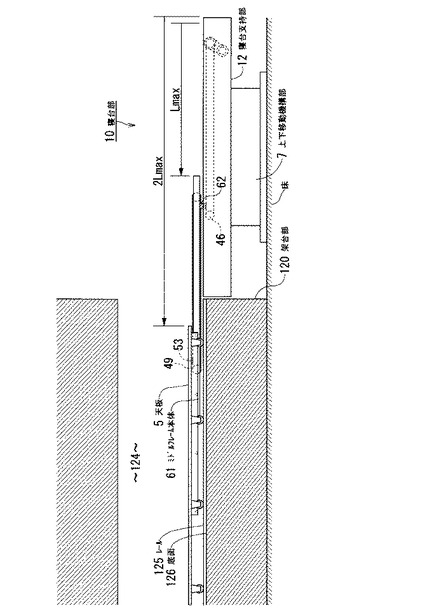
そして、ミドルフレーム本体61はミドルフレーム連結部62がホームポジションからアイドルプーリ46近傍に達する位置まで移動可能である。また、天板5は、ホームポジションから天板連結部53がアイドルプーリ49近傍に達する位置まで移動可能である。そして、ホームポジションにおけるミドルフレーム連結部62とアイドルプーリ46近傍の間、及び天板連結部53とプーリ49近傍の間を図23に示した距離Lmax(Lmax>L)とすると、図23に示すように、ミドルフレーム本体61はホームポジションからL1方向に距離Lmax離れた寝台支持部12及び開口部124の底面126の上方まで移動する。また、天板5は、ホームポジションからL1方向に距離Lmaxの2倍の距離2Lmax離れた開口部124のレール125上まで移動する。このように、天板5を寝台支持部12から距離2Lmax離れた開口部124に設定することができる。
【0106】
なお、ホームポジションにおけるミドルフレーム連結部62とアイドルプーリ46近傍の間、及び天板連結部53及びアイドルプーリ49近傍の間を距離Lmaxよりも更に広げることにより、天板5を更にホームポジションから離れた位置に設定することができる。
【0107】
以上述べた本発明の実施例1によれば、天板5の下側にミドルフレーム6及び寝台支持部12を配置し、寝台支持部12及びミドルフレーム6に一系統の簡単な構成による水平移動機構部4を配置することにより、ミドルフレーム6を天板5と共に長手方向に移動し、更にミドルフレーム6の移動により天板5をミドルフレーム6と同じ方向に移動し、天板5を寝台支持部12からミドルフレーム6よりも離れた位置に設定することができる。
【0108】
これにより、長手方向における天板5の延長を防ぐことができるので、寝台部10の大型化を防ぐことができる。
【実施例2】
【0109】
以下、本発明によるMRI装置の寝台部の実施例2を、図24乃至図35を参照して説明する。図24は、本発明の実施例2に係るMRI装置(寝台装置)の構成を示したブロック図である。
【0110】
図24は、本発明の実施例2に係るMRI装置200Aを示す。図24に示したMRI装置200Aが図1に示したMRI装置200と異なる点は、図24の寝台部(寝台装置)10aの寝台移動部1aに2つのミドルフレーム6a,6bを設けた点と、寝台移動部1aを長手方向に水平移動できるようにした水平移動機構部4aとした点である。以下、実施例1と同じ構成には同符号を付けて説明を省略する。また、図3乃至図9は、MRI装置200Aにも適用ないし準用される。
【0111】
MRI装置200Aの寝台部10aは、被検体Pが載置される寝台移動部1aと、この寝台移動部1aを水平方向及び上下方向に移動して、架台部120の開口部124に被検体Pを設定する機構部2aとを備えている。
【0112】
寝台移動部1aは、被検体Pが載置される天板5a及び天板5aを架台部120の開口部124のレール125上に移動するためのミドルフレーム6a,6bを有する水平移動部11aと、水平移動部11aを支持する寝台支持部12aとを備えている。
【0113】
機構部2aは、水平移動部11aを水平移動する水平移動機構部4aと、水平移動部11aの位置を検出する位置検出器3と、寝台移動部1aを上下移動する上下移動機構部7とを備えている。
【0114】
次に、図25乃至図31を参照して、寝台部10aの寝台移動部1a及び機構部2aの水平移動機構部4aの構成の詳細を説明する。
【0115】
図25及び図26は、寝台移動部1aの水平移動部11aにおける天板5aの構成の詳細を示した図である。図25は寝台部10aを上方から見た図であり、図26は寝台部10aの側面図である。そして、図25及び図26は、寝台部10aのホームポジションにおける天板5aの位置を示している。
【0116】
MRI装置200Aの寝台部10aは、少なくとも長手方向(図25及び図26では左右方向)に移動する天板5aと、その天板5aの下側に配置される寝台支持部12aと、天板5a及び寝台支持部12aの間であって天板5aの幅方向の中央に重ならない位置に配置され、長手方向に移動する複数のミドルフレーム6a,6b,…とを有する。例えば、天板5a及び寝台支持部12aの間であって天板5aの幅方向の中央に重ならない位置に配置され、長手方向に移動するミドルフレーム6bと、天板5a及びミドルフレーム6bの間であって天板5aの幅方向の中央からずらした位置に配置され、長手方向に移動するミドルフレーム6aとを有する。そして、寝台部10aは、寝台支持部12aに対してミドルフレーム6bが移動する間に、天板5aとミドルフレーム6bとミドルフレーム6aとの相対位置関係を変更させる。また、天板5aの長手方向の長さは、ミドルフレーム6a,6bの長手方向の長さと比較して長い構成とする。
【0117】
天板5aは、天板本体51と、天板本体51を前方及び後方の長手方向への移動を円滑に行なうためのローラ付支持脚52aと、図10及び図11における実施例1の天板本体51と同じ位置で天板本体51と水平移動機構部4aの一部とを連結し、水平移動機構部4aからの駆動力を天板本体51に伝達する天板連結部53aと、ローラ55を介してミドルフレーム6aを長手方向に移動可能に保持する2つのミドルフレーム保持部54とにより構成される。
【0118】
図27及び図28は、寝台移動部1aの水平移動部11aにおけるミドルフレーム6a,6b及び寝台支持部12aの構成の詳細を示した図である。図27は寝台部10aを上方から見た切欠き図であり、図28は寝台部10aの側面図である。そして、図27及び図28に示したミドルフレーム6a,6bは、ホームポジションに設定されている。
【0119】
ミドルフレーム6aは、天板5aと寝台支持部12aの間に形成される空間に設けられ、天板5aの下側に配置されるミドルフレーム本体61aと、水平移動機構部4aからの駆動力をミドルフレーム本体61aに伝達するミドルフレーム連結部62aと、ミドルフレーム6bを長手方向に移動可能に保持する2つのミドルフレーム保持部64とにより構成される。
【0120】
ミドルフレーム本体61aは、図12及び図13における実施例1のミドルフレーム本体61と同じ形状及び寸法を有し、天板5aの天板本体51に対して実施例1における図12及び図13の天板本体51と同様の位置に配置されている。
【0121】
ミドルフレーム連結部62aは、天板5aの天板連結部53aの下方に配置され、ミドルフレーム本体61aと水平移動機構部4aの一部とを連結している。そして、水平移動機構部4aから伝達される駆動力をミドルフレーム本体61aに伝達し、ミドルフレーム6aをホームポジションから前方に移動させる。
【0122】
2つのミドルフレーム保持部64は、複数のローラ55を軸支するため、夫々天板5aのミドルフレーム保持部54の下方に配置され、ミドルフレーム本体61aの下面に固定されている。そして、平行に配置された対向側の面には夫々ミドルフレーム6bに係合する複数のローラ55が配置され、ローラ55を介してミドルフレーム6bを長手方向に移動可能に保持している。
【0123】
ミドルフレーム6bは、天板5aと寝台支持部12aの間に形成される空間に設けられ、ミドルフレーム6aの下側に配置されるミドルフレーム本体61bと、水平移動機構部4aからの駆動力をミドルフレーム本体61a及び天板5aに伝達するためのミドルフレーム連結部62bと、水平移動機構部4aからの駆動力をミドルフレーム本体61bに伝達するミドルフレーム連結部62cとにより構成される。
【0124】
ミドルフレーム本体61bは、ミドルフレーム本体61aと同じ形状及び寸法を有し、ミドルフレーム6aのミドルフレーム保持部64を介して長手方向に移動可能に保持されている。
【0125】
ミドルフレーム連結部62bは、ミドルフレーム連結部62aの下方に配置され、ミドルフレーム本体61bと水平移動機構部4aの一部とを連結している。そして、水平移動機構部4aからミドルフレーム6bに伝達される駆動力を水平移動機構部4aを介してミドルフレーム本体61aに伝達する。
【0126】
ミドルフレーム連結部62cは、ミドルフレーム連結部62aの下方に配置され、ミドルフレーム本体61bと水平移動機構部4aの一部とを連結している。そして、水平移動機構部4aから伝達される駆動力をミドルフレーム本体61bに伝達する。
【0127】
寝台支持部12aは、天板5aのローラ付支持脚52が載置され、天板本体51とほぼ同じ長方形の上面を形成している。そして、水平移動機構部4aからの駆動力をミドルフレーム本体61bに伝達するための寝台支持部連結部13aを備え、天板5aを長手方向へ水平移動可能に支持している。
【0128】
寝台支持部連結部13aは、ミドルフレーム連結部62bの下方に配置され、寝台支持部12aと水平移動機構部4aの一部とを連結している。そして、水平移動機構部4aからの駆動力をミドルフレーム本体61bに伝達するために設けられている。
【0129】
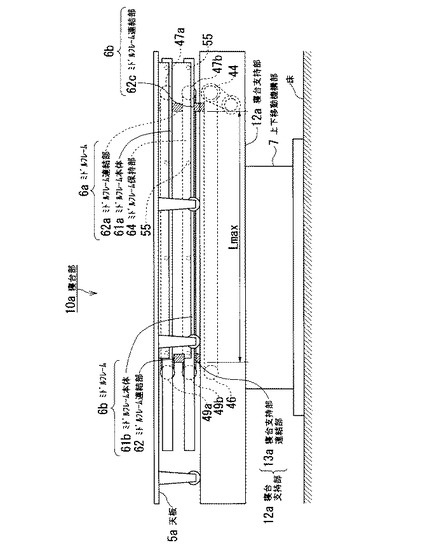
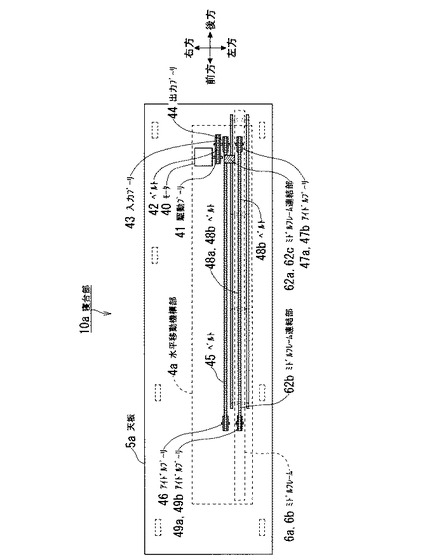
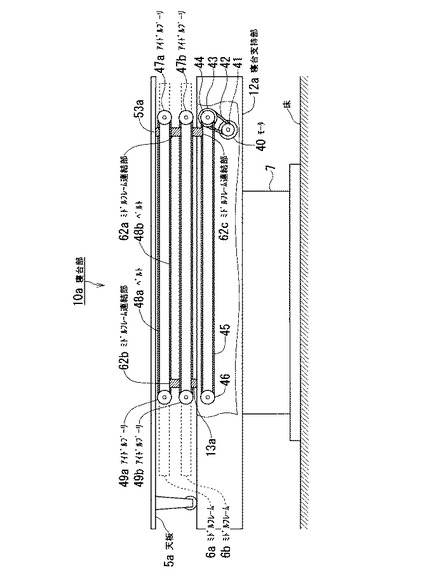
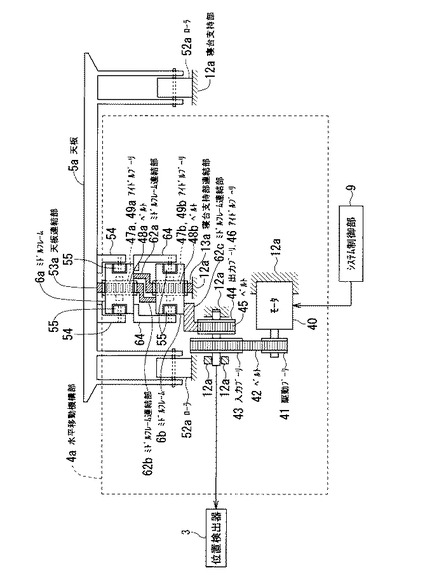
図29乃至図31は、水平移動機構部4aの構成の詳細を示した図である。図29は、寝台部10aを上方から見て水平移動機構部4aを抽出した構成図であり、図30は寝台部10aの側部を左方から見て水平移動機構部4aを抽出した構成図である。そして、図29及び図30は、寝台部10aのホームポジションにおける水平移動機構部4aを示している。図31は寝台部10aを前方から見た水平移動機構部4aの一例を示す構成図である。なお、図31に示した構成では、ミドルフレーム6aをミドルフレーム保持部54を介して天板5aに保持し、ミドルフレーム6bをミドルフレーム保持部64を介してミドルフレーム6aに保持している。しかし、図示しないが、ミドルフレーム6bを寝台支持部12aに保持し、ミドルフレーム6aをミドルフレーム6bに保持してもよい。その場合、図31に示した構成図の場合と比較して、ミドルフレーム6a,6bが床に固定された寝台支持部12に保持されるので、ミドルフレーム6a,6bの保持が安定する。
【0130】
水平移動機構部4aは、寝台支持部12a及びミドルフレーム6a,6bに配置される。寝台支持部12aに配置される水平移動機構部4aの機構は、モータ40、駆動プーリ41、ベルト42、入力プーリ43、出力プーリ44、出力プーリ44からの駆動力をミドルフレーム6bに伝達するベルト45、及びアイドルプーリ46により構成され、図14乃至図17における実施例1の寝台支持部12と同様に寝台支持部12aに保持される。
【0131】
また、ミドルフレーム6bに配置される水平移動機構部4aの機構は、ミドルフレーム6bに伝達されたベルト45からの駆動力をミドルフレーム6aに伝達するベルト48bと、このベルト48bが巻回される一対のアイドルプーリ47b,49bとにより構成される。
【0132】
更に、ミドルフレーム6aに配置される水平移動機構部4aの機構は、ミドルフレーム6aに伝達されたベルト48bからの駆動力を天板5aに伝達するベルト48aと、このベルト48aが巻回されるアイドルプーリ47a,49aとにより構成される。
【0133】
そして、対をなすアイドルプーリ47b,49bおよびその間のベルト48b、及び対をなすアイドルプーリ47a,49aとその間のベルト48aには、駆動力を伝達するために夫々噛み合い歯が形成されている。なお、アイドルプーリ46,49b,49aおよび出力プーリ44とアイドルプーリ47b,47aは、ホームポジションでは同じ位置に配置されており、また下段のベルト45と中段のベルト48bと上段のベルト48aは同じ長さを有している。
【0134】
ベルト45は、出力プーリ44近傍の上側の一部とミドルフレーム6bとがミドルフレーム連結部62cにより連結されている。そして、出力プーリ44からの駆動力を、ミドルフレーム連結部62cを介してミドルフレーム本体61bに伝達して、ミドルフレーム6bを長手方向に水平移動させる。
【0135】
ベルト48bは、ミドルフレーム本体61bの長手方向の上面及び下面の近傍に上側及び下側のベルト面が水平になるように配置され、ミドルフレーム6bに回転移動可能に保持されたアイドルプーリ47b,49bに巻回されている。また、アイドルプーリ47bの近傍の上側の一部とミドルフレーム本体61bとがミドルフレーム連結部62aにより連結され、アイドルプーリ49bの近傍の下側の一部と寝台支持部12aとが寝台支持部連結部13aにより連結されている。そして、ベルト45からミドルフレーム本体61bに伝達された駆動力を、寝台支持部連結部13a及びミドルフレーム連結部62aを介してミドルフレーム本体61aに伝達して、ミドルフレーム6aを長手方向に水平移動させる。
【0136】
ベルト48aは、ミドルフレーム本体61aの長手方向の上面及び下面の近傍に上側及び下側のベルト面が水平になるように配置され、アイドルプーリ47b,49bの夫々上方に配置されミドルフレーム6aに回転可能に保持されたアイドルプーリ47a,49aに巻回されている。また、アイドルプーリ47aの近傍の上側の一部と天板本体51とが天板連結部53aにより連結され、アイドルプーリ49aの近傍の下側の一部とミドルフレーム本体61bとがミドルフレーム連結部62bにより連結されている。そして、ミドルフレーム本体61aに伝達された駆動力を、ミドルフレーム連結部62b及び天板連結部53aを介して天板本体51に伝達して、天板5aをミドルフレーム6a,6bと同じ方向に水平移動させる。
【0137】
このように構成された水平移動機構部4aは、一系統の簡単な構成で水平移動部11aのミドルフレーム6a,6bを長手方向に水平移動すると共に、天板5aをミドルフレーム6a,6bと同じ方向に水平移動することができる。
【0138】
次に、図24乃至図35を参照して、寝台部10aの動作を説明する。
【0139】
寝台部10aの天板5aにMRI撮影部100でMRI撮影をする被検体Pが載置された後、操作部8から寝台移動部1aの上下位置設定操作が行なわれると、システム制御部9は、上下移動機構部7を制御して、寝台移動部1aの寝台支持部12aの上面がMRI撮影部100の架台部120の開口部124に設けられたレール125の高さに一致する位置に寝台移動部1aを設定する。
【0140】
そして、開口部124内の撮影位置に被検体Pを移動するために、操作部8から天板位置設定操作が行なわれると、システム制御部9は、水平移動機構部4aを制御して水平移動部11aを移動して天板5aを開口部124の撮影位置に設定する。また、MRIの撮影が終了した後、操作部8から天板ホームポジション操作が行なわれると、水平移動部11aを寝台支持部12aのホームポジションに水平移動する。
【0141】
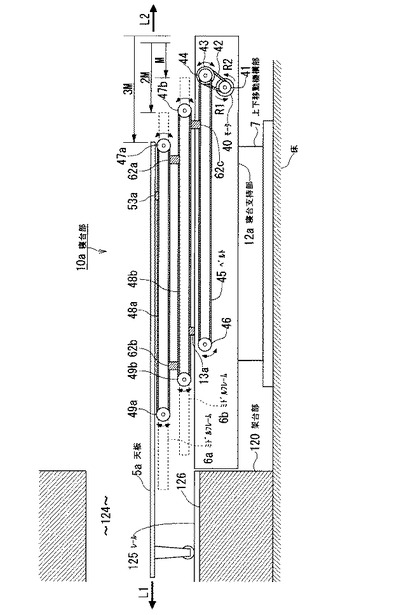
図32及び図33は、開口部124の撮影位置に移動する天板5aを示した図である。天板5aをホームポジションから例えば矢印L1方向に距離3Mを移動した位置に設定する操作が操作部8から行なわれると、システム制御部9は、水平移動機構部4aに天板5aの位置設定を指示する。
【0142】
水平移動機構部4aは、システム制御部9の指示により、モータ40を矢印R1方向に回転させることにより、ホームポジションから水平移動部11aのミドルフレーム6b、ミドルフレーム6a、及び天板5aをL1方向に水平移動させて、夫々距離M、距離2M、及び距離3Mを移動した位置に設定する。
【0143】
また、操作部8から天板ホームポジション操作が行なわれると、モータ40を矢印R2方向に回転させることにより、水平移動部11aをL2方向へ水平移動して元のホームポジションに設定する。
【0144】
図34及び図35は、水平移動部11aをL1方向へ移動する際の水平移動機構部4aの動作を説明するための図である。図34は、寝台部10aの上部を上方から見た図であり、図35は寝台部10aの側部を左方から見た図である。
【0145】
寝台支持部12aに保持される水平移動機構部4aの機構では、モータ40を矢印R1方向に回転させることにより、駆動プーリ41及びベルト42を介して、入力プーリ43及び出力プーリ44をR1方向に回転させる駆動力が伝達される。この出力プーリ44の駆動力は、ベルト45の上側の方をL1方向に移動させる駆動力として伝達される。
【0146】
ミドルフレーム6bに配置される水平移動機構部4aの機構では、ベルト45の駆動力により、ミドルフレーム連結部62cを介してベルト45と連結したミドルフレーム本体61bに、ミドルフレーム6bをL1方向に移動させる駆動力として伝達される。このミドルフレーム本体61bの駆動力により、ミドルフレーム本体61bに保持されたアイドルプーリ47b,49bにL1方向への駆動力が伝達される。
【0147】
このアイドルプーリ47b,49bの駆動力により、アイドルプーリ47b,49bに巻回されているベルト48bにL1方向への駆動力が伝達される。しかしながら、ベルト48bは寝台支持部連結部13aを介して寝台支持部12aと連結されているので、アイドルプーリ47b,49bをR1方向に回転させてベルト48bの上側の方をL1方向に移動させる駆動力として伝達される。
【0148】
ミドルフレーム6aに配置される水平移動機構部4aの機構では、ベルト48bの駆動力により、ミドルフレーム連結部62aを介してベルト48bと連結したミドルフレーム本体61aに、ミドルフレーム6aをL1方向に移動させる駆動力として伝達される。このミドルフレーム本体61aの駆動力により、ミドルフレーム本体61aに保持されたアイドルプーリ47a,49aにL1方向への駆動力が伝達される。
【0149】
このアイドルプーリ47a,49aの駆動力により、アイドルプーリ47a,49aに巻回されているベルト48aにL1方向への駆動力が伝達される。しかしながら、ベルト48aは、ミドルフレーム連結部62bを介してミドルフレーム本体61bと連結されているので、アイドルプーリ47a,49aをR1方向に回転させてベルト48aの上側の方をL1方向に移動させる駆動力として伝達される。
【0150】
そして、ベルト48aの駆動力により、天板連結部53aを介して天板本体51に天板5aをL1方向に移動する駆動力が伝達され、天板5aはL1方向に移動することができる。
【0151】
次に、ミドルフレーム6a,6b及び天板5aの移動距離について説明する。モータ40のR1方向への所定の回転数により、ベルト45の上側がL1方向に距離Mを移動すると、ミドルフレーム連結部62cを介してミドルフレーム6bもL1方向に距離Mを移動する。このミドルフレーム6bの移動により、ベルト48bの上側がL1方向に距離Mを移動し、ミドルフレーム連結部62aを介してミドルフレーム6aもL1方向に距離Mを移動する。このミドルフレーム6aの移動により、ベルト48aの上側がL1方向に距離Mを移動し、天板連結部53aを介して天板5aがL1方向に距離Mを移動する。
【0152】
即ち、ミドルフレーム6bが寝台支持部12a上方をL1方向に距離M移動する間に、ミドルフレーム6aがミドルフレーム6b上をL1方向に距離Mを移動し、ミドルフレーム6aがミドルフレーム6b上をL1方向に距離M移動する間に、天板5aがミドルフレーム6a上を距離M移動することになり、天板5aは、寝台支持部12aに対して距離3Mを移動し、寝台支持部12aからミドルフレーム6b,6aよりも離れた位置に設定される。
【0153】
そして、ミドルフレーム6bは、ミドルフレーム連結部62cがホームポジションからアイドルプーリ46近傍に達する位置まで移動が可能であり、ミドルフレーム6aは、ミドルフレーム連結部62aがアイドルプーリ49b近傍に達する位置まで移動が可能であり、天板5aは、天板連結部53aがアイドルプーリ49a近傍に達する位置まで移動が可能である。
【0154】
従って、ホームポジションにおけるミドルフレーム連結部62cとアイドルプーリ46近傍の間、ミドルフレーム連結部62aとアイドルプーリ49b近傍の間、及び天板連結部53aとアイドルプーリ49a近傍の間を、夫々図28に示した距離Lmaxとすると、天板5aを寝台支持部12aから距離3Lmax離れた開口部124に設定することができる。
【0155】
以上述べた本発明の実施例2によれば、天板5aと寝台支持部12aとの間に2つのミドルフレーム6a,6bを設け、寝台支持部12a及びミドルフレーム6a,6bに一系統の簡単な構成による水平移動機構部4aを配置することにより、ミドルフレーム6bをミドルフレーム6a及び天板5aと共に移動し、またミドルフレーム6bの移動によりミドルフレーム6aを天板5aと共にミドルフレーム6bと同じ方向に移動し、更にミドルフレーム6aの移動により天板5aをミドルフレーム6aと同じ方向に移動して、天板5aを寝台支持部12aからミドルフレーム6a,6bよりも離れた位置に設定することができる。
【0156】
これにより、長手方向における天板5aの延長を防ぐことができるので、寝台部10aの大型化を防ぐことができる。
【0157】
なお、本発明は上記実施例に限定されるものではなく、天板と寝台支持部の間に上下に配置された3つ以上のミドルフレームを設け、寝台支持部及び3つ以上のミドルフレームの夫々に一系統の簡単な構成による水平移動機構部を配置することにより、上記2つのミドルフレーム6a,6bの場合よりも、天板を寝台支持部から更に離れた位置に設定することができる。
【符号の説明】
【0158】
1,1a 寝台移動部
2,2a 機構部
3 位置検出器
4,4a 水平移動機構部
5,5a 天板
6,6a,6b ミドルフレーム
7 上下移動機構部
8,8a,8b 操作部
9 システム制御部
10,10a 寝台部
11,11a 水平移動部
12,12a 寝台支持部
100 MRI撮影部
120 架台部
124 開口部
125 レール
126 底面
200 MRI装置
【技術分野】
【0001】
本発明は、画像診断装置に用いられる寝台装置及びMRI(magnetic resonance imaging)装置に関する。
【背景技術】
【0002】
被検体を撮影して画像診断を行なう画像診断装置には、MRI装置、X線CT(computed tomography)装置、PET(positron emission tomography)装置、X線診断装置などがある。
【0003】
これらMRI装置、X線CT装置及びPET装置などの画像診断装置は、撮影を行なうための開口部が形成された架台部を有し、その開口部に被検体を挿入して撮影が行なわれる。また、循環器用のX線診断装置は、C字形の端部に対向して配置されたX線発生器及びX線検出器を備えた撮影部を有し、X線発生器及とX線検出器の間(開口部)に被検体を挿入して撮影が行なわれる。そして、開口部への被検体の挿入は、開口部の近傍に配置される寝台装置の天板上に被検体を載置し、その天板を開口部内に移動することによって行なわれる。
【0004】
ところで、MRI装置を用いた撮影の場合、天板を移動する機構部を寝台装置に設け、その機構部を用いて寝台装置から離れた開口部内に天板を設定する寝台装置が知られている(例えば、特許文献1参照。)。
【0005】
また、被検体の全身または全身に近い広領域の撮影用に、上下2段の天板を配置した寝台装置がある。この寝台装置の上段の天板上に被検体を載置し、上下2段の天板を揃えて天板の長手方向に水平移動して被検体を撮影位置に設定し、被検体を所望の位置に設定できない場合、更に上段の天板を手動で押し込んで設定している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−252260号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、天板を移動する機構部を設けた寝台装置の場合、天板に取り付けられた一部の機構部を除いた長さ以上に移動して天板を設定することができない。このため被検体の全身の撮影を行なおうとすると、天板を被検体の全身の長さに一部の機構部の分を加えた長さにする必要があるので、寝台装置が大型化してしまう問題がある。
【0008】
また、上下2段の天板を延ばす寝台装置の場合、上段の天板の移動を手動で行なうので手間が掛かる問題があり、仮に上段の天板も下段用と同様の駆動、ケーブルなどの機構を設けようとすると、2箇所に下段及び上段用の2系統の機構が必要になり装置の構成を複雑にする問題がある。
【0009】
加えて、天板を支持し移動駆動させる中間部と、天板と中間部とを支持し移動する寝台本体と、天板と中間部とを駆動する1つの駆動源とを備え、天板及び中間部を駆動源によって同時に異なる速度で移動させる寝台装置が開示されている(JP−A 2006−129938)。しかしながら、この寝台装置を有するMRI装置によると、天板の下側であって幅方向の中央位置に中間部を配置するので、受信信号や制御信号を伝達するための信号ケーブルを、中間部の両側に配置させることになる。その場合、送信用のWB(whole body)コイルが大型化してしまうという問題がある。また、X線CT装置及びPET装置などの画像診断装置においても、天板の下側であって幅方向の中央位置に電気配線等を配置させることができない。
【0010】
本発明は、上記問題点を解決するためになされたもので、大型化することなく簡単な機構で天板を離れた位置に設定することが可能な寝台装置及びMRI装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明に係る寝台装置は、上述した課題を解決するために請求項1に記載したように、少なくとも長手方向に移動する天板と、前記天板の下側に配置される寝台支持部と、前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記天板と同一方向に移動する中間部と、を有し、前記寝台支持部に対して前記中間部が移動する間に、前記天板と前記中間部との相対位置関係を変更させる構成とする。
【0012】
本発明に係る寝台装置は、上述した課題を解決するために請求項9に記載したように、少なくとも長手方向に移動する天板と、前記天板の下側に配置される寝台支持部と、前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する第1の中間部と、前記天板及び前記第1の中間部の間であって前記天板の幅方向の中央からずらした位置に配置され、前記長手方向に移動する第2の中間部と、を有し、前記寝台支持部に対して前記第1の中間部が移動する間に、前記天板と前記第1の中間部と前記第2の中間部との相対位置関係を変更させる構成とする。
【0013】
本発明に係る寝台装置は、上述した課題を解決するために請求項10に記載したように、少なくとも長手方向に移動する天板と、前記天板の下側に配置される寝台支持部と、前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する複数の中間部と、を有し、前記寝台支持部に対して前記複数の中間部のうち1つの中間部が移動する間に、前記天板と前記複数の中間部との相対位置関係を変更させる構成とする。
【0014】
本発明に係るMRI装置は、上述した課題を解決するために請求項11に記載したように、少なくとも長手方向に移動する天板と、前記天板の下側に配置される寝台支持部と、前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記天板と同一方向に移動する中間部と、を有し、前記寝台支持部に対して前記中間部が移動する間に、前記天板と前記中間部との相対位置関係を変更させる構成とする。
【0015】
本発明に係るMRI装置は、上述した課題を解決するために請求項20に記載したように、少なくとも長手方向に移動する天板と、前記天板の下側に配置される寝台支持部と、前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する第1の中間部と、前記天板及び前記第1の中間部の間であって前記天板の幅方向の中央からずらした位置に配置され、前記長手方向に移動する第2の中間部と、を有し、前記寝台支持部に対して前記第1の中間部が移動する間に、前記天板と前記第1の中間部と前記第2の中間部との相対位置関係を変更させる構成とする。
【0016】
本発明に係るMRI装置は、上述した課題を解決するために請求項21に記載したように、少なくとも長手方向に移動する天板と、前記天板の下側に配置される寝台支持部と、前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する複数の中間部と、を有し、前記寝台支持部に対して前記複数の中間部のうち1つの中間部が移動する間に、前記天板と前記複数の中間部との相対位置関係を変更させる構成とする。
【発明の効果】
【0017】
本発明に係る寝台装置及びMRI装置によると、一系統の簡単な機構を用いてミドルフレームを長手方向に水平移動すると共に天板をミドルフレームと同じ方向に移動し、天板を寝台支持部からミドルフレームよりも離れた位置に設定することができるので大型化を防ぐことができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施例1に係るMRI装置(寝台装置)の構成を示すブロック図。
【図2】本発明によるMRI装置の実施例1の概要を説明するための側面図。
【図3】本発明によるMRI装置の実施例1におけるA−A矢視図。
【図4】図1に示すRFコイル及びRF送受信部の構成の一例を示す図。
【図5】図4に示す被検体の体表側に設けられる表面コイルの配置例を示す図。
【図6】図4に示す被検体の背面側に設けられる表面コイルの配置例を示す図。
【図7】図4に示す被検体の体表側に設けられる表面コイルの別の配置例を示す図。
【図8】図4に示す被検体の背面側に設けられる表面コイルの別の配置例を示す図。
【図9】図1に示すRFコイル及びRF送受信部間の受信信号や制御信号を伝達するケーブルの配線の一例を示す側面図。
【図10】本発明の実施例1に係る天板の構成を示す図。
【図11】本発明の実施例1に係る天板の構成を示す図。
【図12】本発明の実施例1に係るミドルフレームの構成を示す図。
【図13】本発明の実施例1に係るミドルフレームの構成を示す図。
【図14】本発明の実施例1に係る水平移動機構部の構成を示す図。
【図15】本発明の実施例1に係る水平移動機構部の構成を示す図。
【図16】本発明の実施例1に係る水平移動機構部の構成の一例を前方から示す図。
【図17】本発明の実施例1に係る水平移動機構部の構成の一例を前方から示す図。
【図18】本発明の実施例1に係る上下移動機構部の構成を示す図。
【図19】本発明の実施例1に係るミドルフレーム及び天板の動作を示す図。
【図20】本発明の実施例1に係るミドルフレーム及び天板の動作を示す図。
【図21】本発明の実施例1に係る天板を移動する水平移動機構部の動作を説明するための図。
【図22】本発明の実施例1に係る天板を移動する水平移動機構部の動作を説明するための図。
【図23】本発明の実施例1に係る天板が移動可能な距離を説明するための図。
【図24】本発明の実施例2に係るMRI装置(寝台装置)の構成を示すブロック図。
【図25】本発明の実施例2に係る天板の構成を示す図。
【図26】本発明の実施例2に係る天板の構成を示す図。
【図27】本発明の実施例2に係るミドルフレームの構成を示す図。
【図28】本発明の実施例2に係るミドルフレームの構成を示す図。
【図29】本発明の実施例2に係る水平移動機構部の構成を示す図。
【図30】本発明の実施例2に係る水平移動機構部の構成を示す図。
【図31】本発明の実施例2に係る水平移動機構部の構成の一例を前方から示す図。
【図32】本発明の実施例2に係るミドルフレーム及び天板の動作を示す図。
【図33】本発明の実施例2に係るミドルフレーム及び天板の動作を示す図。
【図34】本発明の実施例2に係る天板を移動する水平移動機構部の動作を説明するための図。
【図35】本発明の実施例2に係る天板を移動する水平移動機構部の動作を説明するための図。
【発明を実施するための形態】
【0019】
本発明は、画像を形成するための撮影手段を有する架台を備えた画像診断装置として、例えばX線CT(computed tomography)装置、MRI(magnetic resonance imaging)装置、PET(positron emission tomography)装置、X線画像診断装置などに用いることができるが、ここではMRI装置に用いた場合について説明する。
【実施例1】
【0020】
以下、本発明によるMRI装置の実施例1を、図1乃至図23を参照して説明する。図1は、本発明の実施例1に係るMRI装置(寝台装置)の構成を示したブロック図である。
【0021】
図1は、本発明の実施例1に係るMRI装置200を示す。そのMRI装置200は、被検体PのMRI撮影を行なうMRI撮影部100と、MRI撮影部100の撮影位置に被検体Pを設定するための寝台部10と、MRI撮影部100及び寝台部10を操作する操作部8と、操作部8からの信号に基づいてMRI撮影部100及び寝台部10を制御するシステム制御部9とを備えている。
【0022】
MRI撮影部100は、被検体Pに磁場を発生させる架台部120と、架台部120内部の磁場を制御する架台制御部130と、架台部120から出力された信号を処理して画像データを生成し表示する信号処理部140とを備えている。
【0023】
架台部120は、被検体Pの撮影を行なうための開口部124が形成され、この開口部124の底面126には寝台部10の一部を導くためのレール125が設けられている。架台部120内部には、静磁場発生用の磁石121と、静磁場に位置情報を付加するために傾斜磁場を発生する傾斜磁場コイル122と、高周波信号を送受信するRF(radio frequency)コイル123とが配置されている。
【0024】
磁石121は、架台部120内周に配置され、例えば超伝導方式により、開口部124内に設定された被検体Pに静磁場を発生する。この時、磁石121の静磁場電源(図示せず)は架台制御部130によって制御される。
【0025】
傾斜磁場コイル122は、磁石121の内周に配置され、開口部124内の被検体Pに傾斜磁場を発生する。この時、傾斜磁場コイル122の傾斜磁場電源(図示せず)は架台制御部130によって制御される。
【0026】
RFコイル123は、傾斜磁場コイル122と被検体Pの間に配置され、被検体P内部の水素原子核を励起するために高周波磁場を照射すると共に、被検体Pから放出される核磁気共鳴信号を受信し、架台制御部130に出力する。
【0027】
架台制御部130は、傾斜磁場制御部131、静磁場制御部132及びRF送受信部133により構成されている。そして、傾斜磁場制御部131は傾斜磁場コイル122に供給する傾斜磁場を制御し、静磁場制御部132は磁石121に供給する静磁場電源を制御する。
【0028】
また、RF送受信部133はRFコイル123への高周波を送信する送信回路と、RFコイル123からの信号を受信し信号処理を施す受信回路と、送信回路と受信回路を制御するRFシーケンサを備え、受信回路から出力された信号を信号処理部140に送る。
【0029】
信号処理部140は、演算部141と表示部142とを備えている。そして、演算部141は、架台制御部130のRF送受信部133から送られてきた信号を画像処理して画像データを生成し、その画像データをCRT(cathode ray tube)などの表示部142に表示する。
【0030】
寝台部10は、被検体Pが載置される寝台移動部1と、この寝台移動部1を水平方向及び上下方向に移動して、MRI撮影部100の架台部120の開口部124内に被検体Pを設定する機構部2とを備えている。
【0031】
寝台移動部1は、水平移動部11と、水平移動部11を支持する寝台支持部12とを備えている。さらに、水平移動部11は、被検体Pを載置するための天板5と、その天板5をMRI撮影部100の開口部124に移動するために天板5と寝台支持部12との間に設けられる中間部(ミドルフレーム)6とを有する。
【0032】
機構部2は、水平移動部11を水平移動する水平移動機構部4と、水平移動部11の位置を検出する位置検出器3と、寝台移動部1を上下移動する上下移動機構部7とを備えている。
【0033】
操作部8は、図示しないキーボードなどの入力デバイスや表示パネルなどを有する。操作部8は、MRI撮影を行なうための撮影条件の入力などによるMRI撮影部100の操作や、天板5上に載置された被検体Pを架台部120の開口部124に設定するための入力などによる寝台部10の操作を行なう操作部8aと、寝台部10だけの操作を行なう操作部8bとを備えている。そして、架台部120の開口部124に寝台部10の天板5に載置された被検体Pを移動する際に、被検体Pの近くでの操作が可能なように、操作部8bは架台部120に配置される。
【0034】
システム制御部9は、図示しないCPU(central processing unit)や記憶回路などを有し、操作部8からの入力信号に基づいて、MRI撮影部100の架台制御部130及び信号処理部140のMRI撮影に関する制御や、寝台部10の機構部2の移動動作に関する制御などシステム全体の制御を行なう。
【0035】
図2は、MRI装置200の側面図である。なお、図2に示したMRI装置200では、各構成要素を説明し易くするために、便宜的に相対的なサイズを変更している。
【0036】
図2には、MRI装置200の架台部120と寝台部10とを示している。寝台部10は、少なくとも長手方向(図2では左右方向)に移動する天板5と、その天板5の下側に配置される寝台支持部12と、天板5及び寝台支持部12の間に配置され、長手方向に移動するミドルフレーム6とを有する。そして、寝台部10は、寝台支持部12に対してミドルフレーム6が移動する間に、天板5とミドルフレーム6との相対位置関係を変更させる。また、天板5の長手方向の長さは、ミドルフレーム6の長手方向の長さと比較して長い構成とする。
【0037】
また、寝台支持部12は第1の移動機構とその第1の移動機構を動作させる駆動機構とを保持すると共に、第1の移動機構と連結されたミドルフレーム6は天板5と連結された第2の移動機構を保持する。そして、駆動機構の駆動によって第1の移動機構を動作させ、ミドルフレーム6を移動させ、第2の移動機構を動作させることによって、天板5をミドルフレーム6と同一方向に移動させる。
【0038】
例えば、寝台支持部12は、駆動機構として、モータ40と、モータ40の駆動に連動して回転する駆動プーリ41と、入力プーリ43と、駆動プーリ41及び入力プーリ43を両端として回転するベルト42とを有する。さらに、寝台支持部12は、第1の移動機構として、入力プーリ43の回転に連動して回転する出力プーリ44と、アイドルプーリ46と、出力プーリ44及びアイドルプーリ46を両端として回転するベルト45とを有する。また、第1の移動機構と連結されたミドルフレーム6は、第2の移動機構として、アイドルプーリ47,49と、アイドルプーリ47,49を両端として回転するベルト48とを有する。
【0039】
モータ40の駆動を駆動させると、駆動プーリ41、ベルト42及び入力プーリ43が動作され、出力プーリ44が回転する。出力プーリ44の回転に従って、ベルト45が、出力プーリ44及びアイドルプーリ46周りに回転する。ベルト45の回転に従って、ベルト45の一部とミドルフレーム6の一部との連結部である中間部連結部62が長手方向に移動する。中間部連結部62の移動に従って、ミドルフレーム6が中間部連結部62と同一方向に移動する。ミドルフレーム6の移動に従って、ミドルフレーム6によって保持されるベルト48がアイドルプーリ47,49周りを回転する。ベルト48の回転に従って、ベルト48の一部と天板5の一部との連結部である天板連結部53がミドルフレーム6と同一方向に移動する。天板連結部53の移動に従って、天板5が天板連結部53と同一方向に移動する。なお、ベルト48の一部と寝台支持部12の一部とは寝台支持部連結部13によって連結(支持)される。
【0040】
図3は、MRI装置200のA−A矢視図である。
【0041】
図3は、図2に示した側面図のA−A矢視図である。ミドルフレーム6は、架台部120の開口部124に導かれる天板5と寝台支持部12との間であって天板5の幅方向の中央に重ならない位置に配置され、長手方向に移動される。また、天板5及び寝台支持部12の間であって天板5の幅方向の中央に重なる位置に、撮影部(MRI装置200ではMRI撮影部100)からの受信信号及び撮影部への制御信号のうち少なくとも一方を伝達する伝達部であるケーブル(ケーブル群)Cを配置する。そのケーブルCは天板5の下部によって保持される。ここで、天板5の幅方向の中央に重ならない位置とは、一般的に天板5の幅方向の中央に重なる位置に配置されるケーブルC等の配置を妨げないような位置を意味する。
【0042】
図4は、図1に示すRFコイル123及びRF送受信部133の構成の一例を示す図であり、図5は、図4に示す被検体Pの体表側に設けられる表面コイル123cの配置例を示す図、図6は、図4に示す被検体Pの背面側に設けられる表面コイル123cの配置例を示す図である。
【0043】
図4に示すようにRFコイル123は、筒状であり全身用の(WB:whole body)コイル123aとフェーズドアレイコイル123bを備えている。フェーズドアレイコイル123bは、複数の表面コイル123cを備えており、被検体Pの体表側と背面側とにそれぞれ複数の表面コイル123cが配置される。
【0044】
例えば図5に示すように被検体Pの体表側には、広範囲の撮影部位がカバーされるようにx軸方向(幅方向)に4列、z軸方向(長手方向)に8列の合計32個の表面コイル123cが配置される。また、図6に示すように被検体Pの背面側にも同様に広範囲の撮影部位がカバーされるようにx軸方向に4列、z軸方向に8列の合計32個の表面コイル123cが配置される。背面側では、被検体Pの背骨の存在を考慮した感度向上の観点から、体軸付近に他の表面コイル123cよりも小さい表面コイル123cが配置される。
【0045】
一方、図4に示すRF送受信部133は、デュプレクサ133a,アンプ133b、切換合成器133c、受信系回路133d及び送信器133eを備えている。デュプレクサ133aは、送信器133e、WBコイル123a及びWBコイル123a用のアンプ133bと接続される。アンプ133bは、WBコイル123a及び各表面コイル123cの数だけ設けられ、それぞれ個別にWBコイル123a及び各表面コイル123cと接続される。切換合成器133cは、単一又は複数個設けられ、切換合成器133cの入力側は、複数のアンプ133bを介してWBコイル123a又は各表面コイル123cと接続される。受信系回路133dは、WBコイル123a及び各表面コイル123cの数以下となるように所望の数だけ設けられ、切換合成器133cの出力側に設けられる。
【0046】
WBコイル123aは、高周波信号の送信用のコイルとして用いることができる。また、NMR(nuclear magnetic resonance)信号の受信用のコイルとして各表面コイル123cを用いることができる。さらに、WBコイル123aを受信用のコイルとして用いることもできる。
【0047】
このため、デュプレクサ133aは、送信器133eから出力された送信用の高周波信号をWBコイル123aに与える一方、WBコイル123aにおいて受信されたNMR信号をRF送受信部133内のアンプ133bを経由して切換合成器133cに与えるように構成されている。また、各表面コイル123cにおいて受信されたNMR信号もそれぞれ対応するアンプ133bを経由して切換合成器133cに出力されるように構成されている。
【0048】
切換合成器133cは、WBコイル123aや各表面コイル123cから受けたNMR信号の合成処理及び切換を行なって、対応する受信系回路133dに出力するように構成されている。換言すれば、受信系回路133dの数に合わせてWBコイル123aや各表面コイル123cから受けたNMR信号の合成処理及び切換が切換合成器133cにおいて行なわれ、所望の複数の表面コイル123cを用いて撮影部位に応じた感度分布を形成して様々な撮影部位からのNMR信号を受信できるように構成されている。
【0049】
ただし、表面コイル123cを設けずに、WBコイル123aのみでNMR信号を受信するようにしてもよい。また、切換合成器133cを設けずに、WBコイル123aや各表面コイル123cによって受信されたNMR信号を直接に受信系回路133dに出力するようにしてもよい。さらに、より多くの表面コイル123cを広範囲に亘って配置することもできる。
【0050】
図7は、図4に示す被検体Pの体表側に設けられる表面コイル123cの別の配置例を示す図、図8は、図4に示す被検体Pの背面側に設けられる表面コイル123cの別の配置例を示す図である。
【0051】
図7,8に示すようにさらに多くの表面コイル123cを被検体Pの周囲に配置することができる。図7に示す例では、x軸方向に4列、z軸方向に4列の16要素の表面コイル123cで構成されるコイルユニット123dがz軸方向に3つ配置されているため合計48要素の表面コイル123cが被検体Pの体表側に設けられることとなる。また、図8に示す例では、x軸方向に4列、z軸方向に8列の32要素の表面コイル123cで構成されるコイルユニット123eが背骨側に、図示しない2要素の表面コイル123cを備えたコイルユニット123fが顎付近に、図示しない12要素の表面コイル123cを備えたコイルユニット123gが頭部にそれぞれは位置されるため、合計46要素の表面コイル123cが被検体Pの背面側に設けられることとなる。そして、図7及び図8に示すように被検体Pの体表側及び背面側に表面コイル123cを配置すれば、合計94要素の表面コイル123cが被検体Pの周囲に配置されることとなる。各表面コイル123cは、図示しないコイルポートを経由してそれぞれ専用のアンプ133bと接続される。
【0052】
そして、表面コイル123cを多数被検体Pの周囲に配置することによって、コイルや被検体Pの位置を移動させることなく複数の撮影部位からのデータを受信することが可能な全身用のフェーズドアレイコイル123bを形成することが可能となる。WBコイル123aもコイルや被検体Pの位置を移動させることなく複数の撮影部位からのデータを受信することが可能であるが、全身用のフェーズドアレイコイル123bを受信用のコイルとして用いれば、より撮影部位に適した感度及びより良好なSNR(signal to noise ratio)でデータを受信することが可能となる。
【0053】
図9は、図1に示すRFコイル123及びRF送受信部133間の受信信号や制御信号を伝達するケーブルCの配線の一例を示す側面図である。
【0054】
図9に示すように、天板5の頭部側(図9では左側)から延びるケーブルC1や下肢部側(図9では右側)から延びるケーブルC2は、天板5の下側であってミドルフレーム6の側方から寝台部10を経由してRF送受信部133に接続される。なお、図9では便宜上、2本のケーブルC1,C2のみを図示するが、ケーブルCを3本以上有する場合であっても、全てのケーブルCは、天板5の下側であってミドルフレーム6の側方から寝台部10を経由してRF送受信部133に接続される。
【0055】
次に、図10乃至図18を参照して、寝台部10の寝台移動部1及び機構部2の構成の詳細を説明する。
【0056】
図10及び図11は、寝台移動部1の水平移動部11における天板5の構成の詳細を示した図である。図10は寝台部10を上方から見た図であり、図11は寝台部10の側面図である。そして、図10及び図11は、寝台部10のホームポジションにおける天板5の位置を示している。以下の説明においては、図10及び図11に示した寝台部10の左側を前方、右側を後方、上側を右方、及び下側を左方と呼ぶことにする。
【0057】
天板5は、被検体Pが載置される長方形の天板本体51と、天板本体51を前方及び後方の長手方向への移動を円滑に行なうためのローラ付支持脚52と、水平移動機構部4からの駆動力を天板本体51に伝達する天板連結部53と、ミドルフレーム6を保持する2つのミドルフレーム保持部54とにより構成される。
【0058】
ローラ付支持脚52は、天板本体51下面の長辺側両端部近傍の全体に亘って、一定の間隔で複数配置されている。このローラ付支持脚52によって、天板本体51は寝台支持部12上を長手方向に円滑に移動することができる。また、MRI撮影部100の架台部120における開口部124では、レール125上を長手方向に円滑に移動することができる。
【0059】
天板連結部53は、天板本体51の下面の後方の端部近傍に配置され、天板本体51と水平移動機構部4の一部とを連結している。そして、水平移動機構部4から伝達される駆動力を天板本体51に伝達し、天板5をホームポジションから前方に移動させる。
【0060】
2つのミドルフレーム保持部54は、複数のローラ55を軸支するため、天板本体51の下面の天板連結部53の左右に平行に離間して配置され固定されている。そして、平行に配置された対向側の面には夫々ミドルフレーム6に係合する複数のローラ55が配置され、ローラ55を介してミドルフレーム6を長手方向に移動可能に保持している。
【0061】
上記構成を有する寝台部10の天板本体51の上に被検体Pが載置され水平移動機構部4が駆動されると、ミドルフレーム6および天板連結部53を介して天板本体51が駆動され、ローラ付支持脚52の回転によって寝台支持部12上を長手方向(前後方向)に円滑に移動することができる。
【0062】
図12及び図13は、水平移動部11のミドルフレーム6の構成の詳細を示した図である。図12は寝台部10の上部の切欠き図であり、図13は寝台部10の側面図である。そして、図12及び図13は、寝台部10のホームポジションにおけるミドルフレーム6の位置を示している。
【0063】
ミドルフレーム6は、天板5と寝台支持部12の間に形成される空間に設けられ、天板5の下側に配置されるミドルフレーム本体61と、水平移動機構部4からの駆動力をミドルフレーム本体61に伝達するミドルフレーム連結部62とにより構成される。
【0064】
ミドルフレーム本体61は、天板5の下面の長手方向に沿って平行に配置され、前方端部が天板5の前方端部よりも後方に位置し、後方端部が天板5の後方端部よりも前方の端部近傍に位置している。そして、図16に示すように、天板5の巾方向における鉛直方向の断面がI形(又は、T形等)を形成し、そのI形の両側に天板5のミドルフレーム保持部54におけるローラ55が係合している。
【0065】
ミドルフレーム連結部62は、図16に示すように、ミドルフレーム本体61の下面の後方端部よりも前方にあって、天板5の天板連結部53の右斜め下に配置され、ミドルフレーム本体61と水平移動機構部4の一部とを連結している。そして、水平移動機構部4から伝達される駆動力をミドルフレーム本体61に伝達し、ミドルフレーム本体61をホームポジションから前方に移動させる。
【0066】
寝台支持部12は、天板5のローラ付支持脚52が載置され、天板本体51とほぼ同じ長方形の上面を形成している。そして、水平移動機構部4からの駆動力をミドルフレーム6及び天板5に伝達するための寝台支持部連結部13を備え、天板5を長手方向へ水平移動可能に支持している。
【0067】
寝台支持部連結部13は、ミドルフレーム本体61の前方端部よりも後方に配置され、寝台支持部12と水平移動機構部4の一部とを連結している。そして、水平移動機構部4からの駆動力をミドルフレーム本体61に伝達するために設けられている。
【0068】
なお、天板5のローラ付支持脚52の高さを低くして天板5の位置を下げ、寝台支持部12の上面のローラ付支持脚52との接触面の内側の面を下げて、その下げた面に接触しないようにミドルフレーム6を収納する構造にするようにしてもよい。これにより、寝台移動部1の小型化が可能となる。
【0069】
また、ミドルフレーム6の巾方向における長さを拡大し、その拡大したミドルフレーム6に天板5に設けたローラ付支持脚52を配置し、そのミドルフレーム6で長手方向に移動可能に天板5を支持すると共に、そのミドルフレーム6を長手方向に移動可能に寝台支持部12で支持するようにしてもよい。また、天板5及びミドルフレーム6にローラ付支持脚52を配置し、天板5及びミドルフレーム6を寝台支持部12で長手方向に移動可能に支持するようにしてもよい。
【0070】
図14乃至図17は、機構部2の水平移動機構部4の構成の詳細を示した図である。図14は、寝台部10の上部を上方から見て水平移動機構部4を抽出した構成図であり、図15は寝台部10の側部を左方から見て水平移動機構部4を抽出した構成図である。そして、図14及び図15は、寝台部10のホームポジションにける水平移動機構部4を示している。図16は、寝台部10を前方から見た場合の水平移動機構部4の一例を示す構成図である。
【0071】
水平移動機構部4は、寝台支持部12及びミドルフレーム6に配置される。また、水平移動機構部4は、寝台支持部12に保持される。寝台支持部12に配置される水平移動機構部4の機構は、水平移動部11を駆動して天板5を移動させるための動力源としてのモータ40と、このモータ40の駆動力をベルト42に伝達する駆動プーリ41と、ベルト42からの駆動力を出力プーリ44に伝達する駆動プーリ41と対の入力プーリ43と、出力プーリ44からの駆動力をミドルフレーム6に伝達するベルト45と、ベルト45が巻回される出力プーリ44及この出力プーリ44と対のアイドルプーリ46とにより構成される。
【0072】
また、ミドルフレーム6に配置される水平移動機構部4の機構は、ミドルフレーム6に伝達されたベルト45からの駆動力を天板5に伝達するベルト48と、このベルト48が巻回される一対のアイドルプーリ47,49とにより構成される。
【0073】
そして、対をなす駆動プーリ41と入力プーリ43およびその間のベルト42、対をなす出力プーリ44とアイドルプーリ46およびその間のベルト45、及び対をなすアイドルプーリ47,49およびその間のベルト48には、駆動力を伝達するために夫々噛み合い歯が形成されている。なお、アイドルプーリ46,49および出力プーリ44とアイドルプーリ47は、ホームポジションでは同じ位置に配置されており、また下段のベルト45と上段のベルト48は同じ長さを有している。
【0074】
モータ40は、寝台支持部12に固定されている。そして、システム制御部9によりモータ40の回転数、回転方向、及び回転速度などが制御される。ベルト42は、モータ40の回転軸に固定された駆動プーリ41及び入力プーリ43に巻回されており、モータ40の駆動力を、駆動プーリ41及びベルト42を介して入力プーリ43に伝達する。
【0075】
駆動プーリ41よりも多い歯数を有する入力プーリ43は、その回転軸が寝台支持部12の巾方向に平行で水平になるようにミドルフレーム6のミドルフレーム連結部62の後方の近傍に配置され、寝台支持部12に回転可能に保持されている。そして、ベルト42からの駆動力を出力プーリ44に伝達し、入力プーリ43と共有の回転軸を有する出力プーリ44は、入力プーリ43と同じ方向に同じ回転数だけ回転し、入力プーリ43からの駆動力をベルト45に伝達する。
【0076】
ベルト45は、寝台支持部12の長手方向に平行に且つ上側及び下側のベルト面が水平になるように配置され、出力プーリ44とアイドルプーリ46との間に巻回されている。また、出力プーリ44近傍のベルト45の上側の一部とミドルフレーム本体61とがミドルフレーム連結部62で連結されている。そして、出力プーリ44からの駆動力を、ミドルフレーム連結部62を介してミドルフレーム本体61に伝達して、ミドルフレーム6を長手方向に水平移動させる。
【0077】
ベルト48は、ミドルフレーム本体61の長手方向の上面及び下面の近傍に上側及び下側のベルト面が水平になるように配置され、ミドルフレーム6に回転移動可能に保持されたアイドルプーリ47,49に巻回されている。また、アイドルプーリ47の近傍のベルト48の上側の一部と天板5とが天板連結部53で連結され、アイドルプーリ49の近傍のベルト48の下側の一部と寝台支持部12とが寝台支持部連結部13で連結されている。そして、ベルト45からミドルフレーム本体61に伝達された駆動力を、寝台支持部連結部13及び天板連結部53を介して天板本体51に伝達して、天板5をミドルフレーム6と同じ方向に水平移動させる。
【0078】
位置検出器3は、図16に示すように、水平移動機構部4の入力プーリ43に設けられ、エンコーダなどを用いて入力プーリ43の回転方向及び回転数を検出してシステム制御部9に出力する。システム制御部9は、位置検出器3からの出力信号に基づいて水平移動機構部4のモータ40を制御して、天板5の位置を設定する。
【0079】
このように構成された水平移動機構部4は、一系統の簡単な構成で水平移動部11のミドルフレーム6を長手方向に水平移動すると共に、天板5をミドルフレーム6と同じ方向に水平移動することができる。
【0080】
図17は、寝台部10を前方から見た場合の水平移動機構部4の他の例を示す構成図である。
【0081】
図17に示した構成図は、図16に示した構成図の他の例を示す。図17に示した構成では、ミドルフレーム6がミドルフレーム保持部54を介して寝台支持部12によって移動できるように保持される点が図16に示した構成と異なる。図17に示した構成図の場合、図16に示した構成図の場合と比較して、ミドルフレーム6が床に固定された寝台支持部12に保持されるので、ミドルフレーム6の保持が安定する。
【0082】
図18は、上下移動機構部7の構成の詳細を示した側面図である。この上下移動機構部7は、寝台移動部1の寝台支持部12と床との間に配置され、寝台移動部1を上下移動するリンク機構71と、リンク機構71を油圧シリンダ72を介して駆動する油圧ユニット73と、リンク機構71及び油圧ユニット73を支持する長方形のリンクベース74とを備えている。
【0083】
リンク機構71は、4つのアーム75(75a,75b)及び76(76a,76b)と、アーム75及び76の回動軸77と、油圧シリンダ72を支持する2つの支持軸78(78a,78b)と、アーム75及び76の端部を保持する4つのガイド79(79a乃至79d)とを備えている。
【0084】
アーム75は、同じ長さのアーム75a及び75b(図18では、アーム75aの背面に隠れている)から構成され、リンクベース74の巾方向の両端部に夫々一端が回動可能に保持されている。また、夫々他端が寝台支持部12の下面の巾方向の両端部に設けられたガイド79のガイド79a及び79b(図18では、ガイド79aの背面に隠れている)に水平方向にスライド可能に保持されている。
【0085】
アーム76は、アーム75a及び75bと同じ長さで、その中央部で交差するアーム76a及び76b(図18では、アーム76aの背面に隠れている)から構成される。そして、アーム76a及び76bの一端は、アーム75a及び75bの一端の上方に位置し、寝台支持部12の下面に回動可能に保持されている。また、アーム76a及び76bの他端は、アーム75a及び75bの他端の下方に位置し、リンクベース74上に配置されたガイド79のガイド79c及び79d(図18では、ガイド79cの背面に隠れている)に水平方向にスライド可能に保持されている。
【0086】
回動軸77は、アーム75a及び76aの交差部分に形成された穴に一端が遊嵌し、他端がアーム75b及び76bの交差部分に形成された穴に遊嵌して保持されている。
【0087】
支持軸78は、水平に配置された支持軸78a及び78bから構成され、アーム76aのアーム75aとの交差部分の上方に支持軸78aの一端が固定され、他端がアーム76bのアーム75bとの交差部分の上方に固定されている。
【0088】
また、支持軸78の支持軸78bは、アーム75aのアーム76aとの交差部分の下方に一端が固定され、他端がアーム75bのアーム76bとの交差部分の下方に固定されている。
【0089】
油圧シリンダ72は、リンク機構71の支持軸78a及び78bの中央部に一端及び他端が伸縮自在に保持されている。
【0090】
油圧ユニット73は、油圧シリンダ72へ圧油を送る油圧ポンプ、切換弁(図示せず)などを備え、油圧シリンダ72の長さを調整する。
【0091】
このように構成された上下移動機構部7は、システム制御部9の制御により、油圧ユニット73に油圧シリンダ72を伸縮させてリンク機構71の支持軸78a及び支持軸78bを駆動し、その駆動力によりアーム75及び76の夫々一端部が回動軸77を軸として回動すると共に、他端がガイド79をスライドして、寝台移動部1を上下方向に移動する。
【0092】
次に、図1乃至図22を参照して、寝台部10の動作を説明する。
【0093】
寝台部10の天板5にMRI撮影部100でMRI撮影をする被検体Pが載置された後、操作部8から寝台移動部1の上下位置設定操作が行なわれると、システム制御部9は、上下移動機構部7を制御して、寝台移動部1の寝台支持部12の上面がMRI撮影部100の架台部120の開口部124に設けられたレール125の高さに一致する位置に寝台移動部1を設定する。
【0094】
そして、開口部124内の撮影位置に被検体Pを移動するために、操作部8から天板位置設定操作が行なわれると、システム制御部9は、水平移動機構部4を制御して水平移動部11を移動して天板5を開口部124の撮影位置に設定する。また、MRIの撮影が終了した後、操作部8から天板ホームポジション操作が行なわれると、水平移動部11を寝台支持部12のホームポジションに水平移動する。
【0095】
図19及び図20は、開口部124の撮影位置に移動する天板5を示した図である。天板5をホームポジションから例えば矢印L1方向に距離2Lを移動させる操作が操作部8から行なわれると、システム制御部9は、水平移動機構部4に天板5の位置設定を指示する。
【0096】
水平移動機構部4は、システム制御部9の指示により、モータ40を矢印R1方向に回転させることにより、水平移動部11をホームポジションからL1方向へ水平移動する。そして、ホームポジションから、ミドルフレーム6を距離L離れた位置に設定し、天板5を開口部124のレール125及び寝台支持部12上の距離2L離れた位置に設定する。
【0097】
また、操作部8から天板ホームポジション操作が行なわれると、モータ40を矢印R2方向に回転させることにより、水平移動部11をL2方向へ水平移動して元のホームポジションに設定する。
【0098】
図21及び図22は、水平移動部11をL1方向へ移動する際の水平移動機構部4の動作を説明するための図である。図21は、寝台部10の上部を上方から見た図であり、図22は寝台部10の側部を左方から見た図である。
【0099】
寝台支持部12に配置される水平移動機構部4の機構では、モータ40をR1方向に回転させることにより、駆動プーリ41及びベルト42を介して、入力プーリ43及び出力プーリ44をR1方向に回転させる駆動力が伝達される。この出力プーリ44の駆動力は、ベルト45をL1方向に移動させる駆動力として伝達される。
【0100】
ミドルフレーム6に配置される水平移動機構部4の機構では、ベルト45の駆動力により、ミドルフレーム連結部62を介してベルト45と連結されたミドルフレーム本体61にミドルフレーム6をL1方向に移動させる駆動力が伝達される。このミドルフレーム本体61の駆動力により、ミドルフレーム本体61に保持されたアイドルプーリ47,49にL1方向への駆動力が伝達される。
【0101】
このアイドルプーリ47,49の駆動力により、アイドルプーリ47,49に巻回されているベルト48にL1方向への駆動力が伝達される。しかしながら、ベルト48は、寝台支持部連結部13を介して寝台支持部12と連結されているので、アイドルプーリ47,49をR1方向に回転させてベルト48をL1方向に移動させる駆動力として伝達される。
【0102】
そして、ベルト48の駆動力により、天板連結部53を介してベルト48と連結された天板本体51に天板5をL1方向に移動する駆動力が伝達され、天板5はL1方向に移動することができる。
【0103】
次に、ミドルフレーム6及び天板5の移動距離について説明する。モータ40のR1方向への所定の回転数により、ベルト45の上側のほうがL1方向に距離Lを移動すると、ミドルフレーム連結部62を介してベルト45と連結されたミドルフレーム本体61も距離Lを移動する。そして、ミドルフレーム6の移動により、ベルト48の上側がL1方向に距離Lを移動し、天板連結部53を介してベルト48と連結された天板5はミドルフレーム本体61上でL1方向に距離Lを移動する。
【0104】
即ち、ミドルフレーム本体61がL1方向に距離Lを移動する間に、天板5は、ミドルフレーム本体61上を距離L移動する。これにより、天板5は、寝台支持部12に対してミドルフレーム本体61の倍の速度で、ミドルフレーム本体61と同じ方向に2倍の距離2Lを移動し、寝台支持部12からミドルフレーム本体61よりも離れた位置に設定される。
【0105】
そして、ミドルフレーム本体61はミドルフレーム連結部62がホームポジションからアイドルプーリ46近傍に達する位置まで移動可能である。また、天板5は、ホームポジションから天板連結部53がアイドルプーリ49近傍に達する位置まで移動可能である。そして、ホームポジションにおけるミドルフレーム連結部62とアイドルプーリ46近傍の間、及び天板連結部53とプーリ49近傍の間を図23に示した距離Lmax(Lmax>L)とすると、図23に示すように、ミドルフレーム本体61はホームポジションからL1方向に距離Lmax離れた寝台支持部12及び開口部124の底面126の上方まで移動する。また、天板5は、ホームポジションからL1方向に距離Lmaxの2倍の距離2Lmax離れた開口部124のレール125上まで移動する。このように、天板5を寝台支持部12から距離2Lmax離れた開口部124に設定することができる。
【0106】
なお、ホームポジションにおけるミドルフレーム連結部62とアイドルプーリ46近傍の間、及び天板連結部53及びアイドルプーリ49近傍の間を距離Lmaxよりも更に広げることにより、天板5を更にホームポジションから離れた位置に設定することができる。
【0107】
以上述べた本発明の実施例1によれば、天板5の下側にミドルフレーム6及び寝台支持部12を配置し、寝台支持部12及びミドルフレーム6に一系統の簡単な構成による水平移動機構部4を配置することにより、ミドルフレーム6を天板5と共に長手方向に移動し、更にミドルフレーム6の移動により天板5をミドルフレーム6と同じ方向に移動し、天板5を寝台支持部12からミドルフレーム6よりも離れた位置に設定することができる。
【0108】
これにより、長手方向における天板5の延長を防ぐことができるので、寝台部10の大型化を防ぐことができる。
【実施例2】
【0109】
以下、本発明によるMRI装置の寝台部の実施例2を、図24乃至図35を参照して説明する。図24は、本発明の実施例2に係るMRI装置(寝台装置)の構成を示したブロック図である。
【0110】
図24は、本発明の実施例2に係るMRI装置200Aを示す。図24に示したMRI装置200Aが図1に示したMRI装置200と異なる点は、図24の寝台部(寝台装置)10aの寝台移動部1aに2つのミドルフレーム6a,6bを設けた点と、寝台移動部1aを長手方向に水平移動できるようにした水平移動機構部4aとした点である。以下、実施例1と同じ構成には同符号を付けて説明を省略する。また、図3乃至図9は、MRI装置200Aにも適用ないし準用される。
【0111】
MRI装置200Aの寝台部10aは、被検体Pが載置される寝台移動部1aと、この寝台移動部1aを水平方向及び上下方向に移動して、架台部120の開口部124に被検体Pを設定する機構部2aとを備えている。
【0112】
寝台移動部1aは、被検体Pが載置される天板5a及び天板5aを架台部120の開口部124のレール125上に移動するためのミドルフレーム6a,6bを有する水平移動部11aと、水平移動部11aを支持する寝台支持部12aとを備えている。
【0113】
機構部2aは、水平移動部11aを水平移動する水平移動機構部4aと、水平移動部11aの位置を検出する位置検出器3と、寝台移動部1aを上下移動する上下移動機構部7とを備えている。
【0114】
次に、図25乃至図31を参照して、寝台部10aの寝台移動部1a及び機構部2aの水平移動機構部4aの構成の詳細を説明する。
【0115】
図25及び図26は、寝台移動部1aの水平移動部11aにおける天板5aの構成の詳細を示した図である。図25は寝台部10aを上方から見た図であり、図26は寝台部10aの側面図である。そして、図25及び図26は、寝台部10aのホームポジションにおける天板5aの位置を示している。
【0116】
MRI装置200Aの寝台部10aは、少なくとも長手方向(図25及び図26では左右方向)に移動する天板5aと、その天板5aの下側に配置される寝台支持部12aと、天板5a及び寝台支持部12aの間であって天板5aの幅方向の中央に重ならない位置に配置され、長手方向に移動する複数のミドルフレーム6a,6b,…とを有する。例えば、天板5a及び寝台支持部12aの間であって天板5aの幅方向の中央に重ならない位置に配置され、長手方向に移動するミドルフレーム6bと、天板5a及びミドルフレーム6bの間であって天板5aの幅方向の中央からずらした位置に配置され、長手方向に移動するミドルフレーム6aとを有する。そして、寝台部10aは、寝台支持部12aに対してミドルフレーム6bが移動する間に、天板5aとミドルフレーム6bとミドルフレーム6aとの相対位置関係を変更させる。また、天板5aの長手方向の長さは、ミドルフレーム6a,6bの長手方向の長さと比較して長い構成とする。
【0117】
天板5aは、天板本体51と、天板本体51を前方及び後方の長手方向への移動を円滑に行なうためのローラ付支持脚52aと、図10及び図11における実施例1の天板本体51と同じ位置で天板本体51と水平移動機構部4aの一部とを連結し、水平移動機構部4aからの駆動力を天板本体51に伝達する天板連結部53aと、ローラ55を介してミドルフレーム6aを長手方向に移動可能に保持する2つのミドルフレーム保持部54とにより構成される。
【0118】
図27及び図28は、寝台移動部1aの水平移動部11aにおけるミドルフレーム6a,6b及び寝台支持部12aの構成の詳細を示した図である。図27は寝台部10aを上方から見た切欠き図であり、図28は寝台部10aの側面図である。そして、図27及び図28に示したミドルフレーム6a,6bは、ホームポジションに設定されている。
【0119】
ミドルフレーム6aは、天板5aと寝台支持部12aの間に形成される空間に設けられ、天板5aの下側に配置されるミドルフレーム本体61aと、水平移動機構部4aからの駆動力をミドルフレーム本体61aに伝達するミドルフレーム連結部62aと、ミドルフレーム6bを長手方向に移動可能に保持する2つのミドルフレーム保持部64とにより構成される。
【0120】
ミドルフレーム本体61aは、図12及び図13における実施例1のミドルフレーム本体61と同じ形状及び寸法を有し、天板5aの天板本体51に対して実施例1における図12及び図13の天板本体51と同様の位置に配置されている。
【0121】
ミドルフレーム連結部62aは、天板5aの天板連結部53aの下方に配置され、ミドルフレーム本体61aと水平移動機構部4aの一部とを連結している。そして、水平移動機構部4aから伝達される駆動力をミドルフレーム本体61aに伝達し、ミドルフレーム6aをホームポジションから前方に移動させる。
【0122】
2つのミドルフレーム保持部64は、複数のローラ55を軸支するため、夫々天板5aのミドルフレーム保持部54の下方に配置され、ミドルフレーム本体61aの下面に固定されている。そして、平行に配置された対向側の面には夫々ミドルフレーム6bに係合する複数のローラ55が配置され、ローラ55を介してミドルフレーム6bを長手方向に移動可能に保持している。
【0123】
ミドルフレーム6bは、天板5aと寝台支持部12aの間に形成される空間に設けられ、ミドルフレーム6aの下側に配置されるミドルフレーム本体61bと、水平移動機構部4aからの駆動力をミドルフレーム本体61a及び天板5aに伝達するためのミドルフレーム連結部62bと、水平移動機構部4aからの駆動力をミドルフレーム本体61bに伝達するミドルフレーム連結部62cとにより構成される。
【0124】
ミドルフレーム本体61bは、ミドルフレーム本体61aと同じ形状及び寸法を有し、ミドルフレーム6aのミドルフレーム保持部64を介して長手方向に移動可能に保持されている。
【0125】
ミドルフレーム連結部62bは、ミドルフレーム連結部62aの下方に配置され、ミドルフレーム本体61bと水平移動機構部4aの一部とを連結している。そして、水平移動機構部4aからミドルフレーム6bに伝達される駆動力を水平移動機構部4aを介してミドルフレーム本体61aに伝達する。
【0126】
ミドルフレーム連結部62cは、ミドルフレーム連結部62aの下方に配置され、ミドルフレーム本体61bと水平移動機構部4aの一部とを連結している。そして、水平移動機構部4aから伝達される駆動力をミドルフレーム本体61bに伝達する。
【0127】
寝台支持部12aは、天板5aのローラ付支持脚52が載置され、天板本体51とほぼ同じ長方形の上面を形成している。そして、水平移動機構部4aからの駆動力をミドルフレーム本体61bに伝達するための寝台支持部連結部13aを備え、天板5aを長手方向へ水平移動可能に支持している。
【0128】
寝台支持部連結部13aは、ミドルフレーム連結部62bの下方に配置され、寝台支持部12aと水平移動機構部4aの一部とを連結している。そして、水平移動機構部4aからの駆動力をミドルフレーム本体61bに伝達するために設けられている。
【0129】
図29乃至図31は、水平移動機構部4aの構成の詳細を示した図である。図29は、寝台部10aを上方から見て水平移動機構部4aを抽出した構成図であり、図30は寝台部10aの側部を左方から見て水平移動機構部4aを抽出した構成図である。そして、図29及び図30は、寝台部10aのホームポジションにおける水平移動機構部4aを示している。図31は寝台部10aを前方から見た水平移動機構部4aの一例を示す構成図である。なお、図31に示した構成では、ミドルフレーム6aをミドルフレーム保持部54を介して天板5aに保持し、ミドルフレーム6bをミドルフレーム保持部64を介してミドルフレーム6aに保持している。しかし、図示しないが、ミドルフレーム6bを寝台支持部12aに保持し、ミドルフレーム6aをミドルフレーム6bに保持してもよい。その場合、図31に示した構成図の場合と比較して、ミドルフレーム6a,6bが床に固定された寝台支持部12に保持されるので、ミドルフレーム6a,6bの保持が安定する。
【0130】
水平移動機構部4aは、寝台支持部12a及びミドルフレーム6a,6bに配置される。寝台支持部12aに配置される水平移動機構部4aの機構は、モータ40、駆動プーリ41、ベルト42、入力プーリ43、出力プーリ44、出力プーリ44からの駆動力をミドルフレーム6bに伝達するベルト45、及びアイドルプーリ46により構成され、図14乃至図17における実施例1の寝台支持部12と同様に寝台支持部12aに保持される。
【0131】
また、ミドルフレーム6bに配置される水平移動機構部4aの機構は、ミドルフレーム6bに伝達されたベルト45からの駆動力をミドルフレーム6aに伝達するベルト48bと、このベルト48bが巻回される一対のアイドルプーリ47b,49bとにより構成される。
【0132】
更に、ミドルフレーム6aに配置される水平移動機構部4aの機構は、ミドルフレーム6aに伝達されたベルト48bからの駆動力を天板5aに伝達するベルト48aと、このベルト48aが巻回されるアイドルプーリ47a,49aとにより構成される。
【0133】
そして、対をなすアイドルプーリ47b,49bおよびその間のベルト48b、及び対をなすアイドルプーリ47a,49aとその間のベルト48aには、駆動力を伝達するために夫々噛み合い歯が形成されている。なお、アイドルプーリ46,49b,49aおよび出力プーリ44とアイドルプーリ47b,47aは、ホームポジションでは同じ位置に配置されており、また下段のベルト45と中段のベルト48bと上段のベルト48aは同じ長さを有している。
【0134】
ベルト45は、出力プーリ44近傍の上側の一部とミドルフレーム6bとがミドルフレーム連結部62cにより連結されている。そして、出力プーリ44からの駆動力を、ミドルフレーム連結部62cを介してミドルフレーム本体61bに伝達して、ミドルフレーム6bを長手方向に水平移動させる。
【0135】
ベルト48bは、ミドルフレーム本体61bの長手方向の上面及び下面の近傍に上側及び下側のベルト面が水平になるように配置され、ミドルフレーム6bに回転移動可能に保持されたアイドルプーリ47b,49bに巻回されている。また、アイドルプーリ47bの近傍の上側の一部とミドルフレーム本体61bとがミドルフレーム連結部62aにより連結され、アイドルプーリ49bの近傍の下側の一部と寝台支持部12aとが寝台支持部連結部13aにより連結されている。そして、ベルト45からミドルフレーム本体61bに伝達された駆動力を、寝台支持部連結部13a及びミドルフレーム連結部62aを介してミドルフレーム本体61aに伝達して、ミドルフレーム6aを長手方向に水平移動させる。
【0136】
ベルト48aは、ミドルフレーム本体61aの長手方向の上面及び下面の近傍に上側及び下側のベルト面が水平になるように配置され、アイドルプーリ47b,49bの夫々上方に配置されミドルフレーム6aに回転可能に保持されたアイドルプーリ47a,49aに巻回されている。また、アイドルプーリ47aの近傍の上側の一部と天板本体51とが天板連結部53aにより連結され、アイドルプーリ49aの近傍の下側の一部とミドルフレーム本体61bとがミドルフレーム連結部62bにより連結されている。そして、ミドルフレーム本体61aに伝達された駆動力を、ミドルフレーム連結部62b及び天板連結部53aを介して天板本体51に伝達して、天板5aをミドルフレーム6a,6bと同じ方向に水平移動させる。
【0137】
このように構成された水平移動機構部4aは、一系統の簡単な構成で水平移動部11aのミドルフレーム6a,6bを長手方向に水平移動すると共に、天板5aをミドルフレーム6a,6bと同じ方向に水平移動することができる。
【0138】
次に、図24乃至図35を参照して、寝台部10aの動作を説明する。
【0139】
寝台部10aの天板5aにMRI撮影部100でMRI撮影をする被検体Pが載置された後、操作部8から寝台移動部1aの上下位置設定操作が行なわれると、システム制御部9は、上下移動機構部7を制御して、寝台移動部1aの寝台支持部12aの上面がMRI撮影部100の架台部120の開口部124に設けられたレール125の高さに一致する位置に寝台移動部1aを設定する。
【0140】
そして、開口部124内の撮影位置に被検体Pを移動するために、操作部8から天板位置設定操作が行なわれると、システム制御部9は、水平移動機構部4aを制御して水平移動部11aを移動して天板5aを開口部124の撮影位置に設定する。また、MRIの撮影が終了した後、操作部8から天板ホームポジション操作が行なわれると、水平移動部11aを寝台支持部12aのホームポジションに水平移動する。
【0141】
図32及び図33は、開口部124の撮影位置に移動する天板5aを示した図である。天板5aをホームポジションから例えば矢印L1方向に距離3Mを移動した位置に設定する操作が操作部8から行なわれると、システム制御部9は、水平移動機構部4aに天板5aの位置設定を指示する。
【0142】
水平移動機構部4aは、システム制御部9の指示により、モータ40を矢印R1方向に回転させることにより、ホームポジションから水平移動部11aのミドルフレーム6b、ミドルフレーム6a、及び天板5aをL1方向に水平移動させて、夫々距離M、距離2M、及び距離3Mを移動した位置に設定する。
【0143】
また、操作部8から天板ホームポジション操作が行なわれると、モータ40を矢印R2方向に回転させることにより、水平移動部11aをL2方向へ水平移動して元のホームポジションに設定する。
【0144】
図34及び図35は、水平移動部11aをL1方向へ移動する際の水平移動機構部4aの動作を説明するための図である。図34は、寝台部10aの上部を上方から見た図であり、図35は寝台部10aの側部を左方から見た図である。
【0145】
寝台支持部12aに保持される水平移動機構部4aの機構では、モータ40を矢印R1方向に回転させることにより、駆動プーリ41及びベルト42を介して、入力プーリ43及び出力プーリ44をR1方向に回転させる駆動力が伝達される。この出力プーリ44の駆動力は、ベルト45の上側の方をL1方向に移動させる駆動力として伝達される。
【0146】
ミドルフレーム6bに配置される水平移動機構部4aの機構では、ベルト45の駆動力により、ミドルフレーム連結部62cを介してベルト45と連結したミドルフレーム本体61bに、ミドルフレーム6bをL1方向に移動させる駆動力として伝達される。このミドルフレーム本体61bの駆動力により、ミドルフレーム本体61bに保持されたアイドルプーリ47b,49bにL1方向への駆動力が伝達される。
【0147】
このアイドルプーリ47b,49bの駆動力により、アイドルプーリ47b,49bに巻回されているベルト48bにL1方向への駆動力が伝達される。しかしながら、ベルト48bは寝台支持部連結部13aを介して寝台支持部12aと連結されているので、アイドルプーリ47b,49bをR1方向に回転させてベルト48bの上側の方をL1方向に移動させる駆動力として伝達される。
【0148】
ミドルフレーム6aに配置される水平移動機構部4aの機構では、ベルト48bの駆動力により、ミドルフレーム連結部62aを介してベルト48bと連結したミドルフレーム本体61aに、ミドルフレーム6aをL1方向に移動させる駆動力として伝達される。このミドルフレーム本体61aの駆動力により、ミドルフレーム本体61aに保持されたアイドルプーリ47a,49aにL1方向への駆動力が伝達される。
【0149】
このアイドルプーリ47a,49aの駆動力により、アイドルプーリ47a,49aに巻回されているベルト48aにL1方向への駆動力が伝達される。しかしながら、ベルト48aは、ミドルフレーム連結部62bを介してミドルフレーム本体61bと連結されているので、アイドルプーリ47a,49aをR1方向に回転させてベルト48aの上側の方をL1方向に移動させる駆動力として伝達される。
【0150】
そして、ベルト48aの駆動力により、天板連結部53aを介して天板本体51に天板5aをL1方向に移動する駆動力が伝達され、天板5aはL1方向に移動することができる。
【0151】
次に、ミドルフレーム6a,6b及び天板5aの移動距離について説明する。モータ40のR1方向への所定の回転数により、ベルト45の上側がL1方向に距離Mを移動すると、ミドルフレーム連結部62cを介してミドルフレーム6bもL1方向に距離Mを移動する。このミドルフレーム6bの移動により、ベルト48bの上側がL1方向に距離Mを移動し、ミドルフレーム連結部62aを介してミドルフレーム6aもL1方向に距離Mを移動する。このミドルフレーム6aの移動により、ベルト48aの上側がL1方向に距離Mを移動し、天板連結部53aを介して天板5aがL1方向に距離Mを移動する。
【0152】
即ち、ミドルフレーム6bが寝台支持部12a上方をL1方向に距離M移動する間に、ミドルフレーム6aがミドルフレーム6b上をL1方向に距離Mを移動し、ミドルフレーム6aがミドルフレーム6b上をL1方向に距離M移動する間に、天板5aがミドルフレーム6a上を距離M移動することになり、天板5aは、寝台支持部12aに対して距離3Mを移動し、寝台支持部12aからミドルフレーム6b,6aよりも離れた位置に設定される。
【0153】
そして、ミドルフレーム6bは、ミドルフレーム連結部62cがホームポジションからアイドルプーリ46近傍に達する位置まで移動が可能であり、ミドルフレーム6aは、ミドルフレーム連結部62aがアイドルプーリ49b近傍に達する位置まで移動が可能であり、天板5aは、天板連結部53aがアイドルプーリ49a近傍に達する位置まで移動が可能である。
【0154】
従って、ホームポジションにおけるミドルフレーム連結部62cとアイドルプーリ46近傍の間、ミドルフレーム連結部62aとアイドルプーリ49b近傍の間、及び天板連結部53aとアイドルプーリ49a近傍の間を、夫々図28に示した距離Lmaxとすると、天板5aを寝台支持部12aから距離3Lmax離れた開口部124に設定することができる。
【0155】
以上述べた本発明の実施例2によれば、天板5aと寝台支持部12aとの間に2つのミドルフレーム6a,6bを設け、寝台支持部12a及びミドルフレーム6a,6bに一系統の簡単な構成による水平移動機構部4aを配置することにより、ミドルフレーム6bをミドルフレーム6a及び天板5aと共に移動し、またミドルフレーム6bの移動によりミドルフレーム6aを天板5aと共にミドルフレーム6bと同じ方向に移動し、更にミドルフレーム6aの移動により天板5aをミドルフレーム6aと同じ方向に移動して、天板5aを寝台支持部12aからミドルフレーム6a,6bよりも離れた位置に設定することができる。
【0156】
これにより、長手方向における天板5aの延長を防ぐことができるので、寝台部10aの大型化を防ぐことができる。
【0157】
なお、本発明は上記実施例に限定されるものではなく、天板と寝台支持部の間に上下に配置された3つ以上のミドルフレームを設け、寝台支持部及び3つ以上のミドルフレームの夫々に一系統の簡単な構成による水平移動機構部を配置することにより、上記2つのミドルフレーム6a,6bの場合よりも、天板を寝台支持部から更に離れた位置に設定することができる。
【符号の説明】
【0158】
1,1a 寝台移動部
2,2a 機構部
3 位置検出器
4,4a 水平移動機構部
5,5a 天板
6,6a,6b ミドルフレーム
7 上下移動機構部
8,8a,8b 操作部
9 システム制御部
10,10a 寝台部
11,11a 水平移動部
12,12a 寝台支持部
100 MRI撮影部
120 架台部
124 開口部
125 レール
126 底面
200 MRI装置
【特許請求の範囲】
【請求項1】
少なくとも長手方向に移動する天板と、
前記天板の下側に配置される寝台支持部と、
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記天板と同一方向に移動する中間部と、を有し、
前記寝台支持部に対して前記中間部が移動する間に、前記天板と前記中間部との相対位置関係を変更させる構成とすることを特徴とする寝台装置。
【請求項2】
前記寝台支持部は第1の移動機構と前記第1の移動機構を動作させる駆動機構とを保持すると共に、前記第1の移動機構と連結された中間部は前記天板と連結された第2の移動機構を保持し、前記駆動機構の駆動によって前記第1の移動機構を動作させることで前記中間部を移動させ、さらに前記第2の移動機構を動作させることによって、前記天板を前記中間部と同一方向に移動させることを特徴とする請求項1に記載の寝台装置。
【請求項3】
前記中間部が所定距離を移動した時に、前記天板を前記所定距離の倍の距離を移動させることを特徴とする請求項1に記載の寝台装置。
【請求項4】
前記天板の前記長手方向の長さは、前記中間部の前記長手方向の長さと比較して長い構成とすることを特徴とする請求項1に記載の寝台装置。
【請求項5】
前記中間部は、前記長手方向に移動できるように前記寝台支持部に保持されることを特徴とする請求項1に記載の寝台装置。
【請求項6】
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重なる位置に、撮影部からの受信信号及び前記撮影部への制御信号のうち少なくとも一方を伝達する伝達部を配置することを特徴とする請求項1に記載の寝台装置。
【請求項7】
少なくとも長手方向に移動する天板と、
前記天板の下側に配置される寝台支持部と、
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する第1の中間部と、
前記天板及び前記第1の中間部の間であって前記天板の幅方向の中央からずらした位置に配置され、前記長手方向に移動する第2の中間部と、を有し、
前記寝台支持部に対して前記第1の中間部が移動する間に、前記天板と前記第1の中間部と前記第2の中間部との相対位置関係を変更させる構成とすることを特徴とする寝台装置。
【請求項8】
少なくとも長手方向に移動する天板と、
前記天板の下側に配置される寝台支持部と、
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する複数の中間部と、を有し、
前記寝台支持部に対して前記複数の中間部のうち1つの中間部が移動する間に、前記天板と前記複数の中間部との相対位置関係を変更させる構成とすることを特徴とする寝台装置。
【請求項9】
少なくとも長手方向に移動する天板と、
前記天板の下側に配置される寝台支持部と、
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記天板と同一方向に移動する中間部と、を有し、
前記寝台支持部に対して前記中間部が移動する間に、前記天板と前記中間部との相対位置関係を変更させる構成とすることを特徴とするMRI装置。
【請求項10】
前記寝台支持部は第1の移動機構と前記第1の移動機構を動作させる駆動機構とを保持すると共に、前記第1の移動機構と連結された中間部は前記天板と連結された第2の移動機構を保持し、前記駆動機構の駆動によって前記第1の移動機構を動作させ、前記中間部を移動させ、前記第2の移動機構を動作させることによって、前記天板を前記中間部と同一方向に移動させることを特徴とする請求項9に記載のMRI装置。
【請求項11】
前記中間部が所定距離を移動した時に、前記天板を前記所定距離の倍の距離を移動させることを特徴とする請求項9に記載のMRI装置。
【請求項12】
前記天板の前記長手方向の長さは、前記中間部の前記長手方向の長さと比較して長い構成とすることを特徴とする請求項9に記載のMRI装置。
【請求項13】
前記中間部は、前記長手方向に移動できるように前記寝台支持部に保持されることを特徴とする請求項9に記載のMRI装置。
【請求項14】
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重なる位置に、MRI撮影部からの受信信号及び前記MRI撮影部への制御信号のうち少なくとも一方を伝達する伝達部を配置することを特徴とする請求項9に記載のMRI装置。
【請求項15】
前記伝達部は、前記MRI撮影部に有する複数の表面コイルからの受信信号及び前記複数の表面コイルへの制御信号のうち少なくとも一方を伝達することを特徴とする請求項14に記載のMRI装置。
【請求項16】
少なくとも長手方向に移動する天板と、
前記天板の下側に配置される寝台支持部と、
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する第1の中間部と、
前記天板及び前記第1の中間部の間であって前記天板の幅方向の中央からずらした位置に配置され、前記長手方向に移動する第2の中間部と、を有し、
前記寝台支持部に対して前記第1の中間部が移動する間に、前記天板と前記第1の中間部と前記第2の中間部との相対位置関係を変更させる構成とすることを特徴とするMRI装置。
【請求項17】
少なくとも長手方向に移動する天板と、
前記天板の下側に配置される寝台支持部と、
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する複数の中間部と、を有し、
前記寝台支持部に対して前記複数の中間部のうち1つの中間部が移動する間に、前記天板と前記複数の中間部との相対位置関係を変更させる構成とすることを特徴とするMRI装置。
【請求項1】
少なくとも長手方向に移動する天板と、
前記天板の下側に配置される寝台支持部と、
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記天板と同一方向に移動する中間部と、を有し、
前記寝台支持部に対して前記中間部が移動する間に、前記天板と前記中間部との相対位置関係を変更させる構成とすることを特徴とする寝台装置。
【請求項2】
前記寝台支持部は第1の移動機構と前記第1の移動機構を動作させる駆動機構とを保持すると共に、前記第1の移動機構と連結された中間部は前記天板と連結された第2の移動機構を保持し、前記駆動機構の駆動によって前記第1の移動機構を動作させることで前記中間部を移動させ、さらに前記第2の移動機構を動作させることによって、前記天板を前記中間部と同一方向に移動させることを特徴とする請求項1に記載の寝台装置。
【請求項3】
前記中間部が所定距離を移動した時に、前記天板を前記所定距離の倍の距離を移動させることを特徴とする請求項1に記載の寝台装置。
【請求項4】
前記天板の前記長手方向の長さは、前記中間部の前記長手方向の長さと比較して長い構成とすることを特徴とする請求項1に記載の寝台装置。
【請求項5】
前記中間部は、前記長手方向に移動できるように前記寝台支持部に保持されることを特徴とする請求項1に記載の寝台装置。
【請求項6】
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重なる位置に、撮影部からの受信信号及び前記撮影部への制御信号のうち少なくとも一方を伝達する伝達部を配置することを特徴とする請求項1に記載の寝台装置。
【請求項7】
少なくとも長手方向に移動する天板と、
前記天板の下側に配置される寝台支持部と、
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する第1の中間部と、
前記天板及び前記第1の中間部の間であって前記天板の幅方向の中央からずらした位置に配置され、前記長手方向に移動する第2の中間部と、を有し、
前記寝台支持部に対して前記第1の中間部が移動する間に、前記天板と前記第1の中間部と前記第2の中間部との相対位置関係を変更させる構成とすることを特徴とする寝台装置。
【請求項8】
少なくとも長手方向に移動する天板と、
前記天板の下側に配置される寝台支持部と、
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する複数の中間部と、を有し、
前記寝台支持部に対して前記複数の中間部のうち1つの中間部が移動する間に、前記天板と前記複数の中間部との相対位置関係を変更させる構成とすることを特徴とする寝台装置。
【請求項9】
少なくとも長手方向に移動する天板と、
前記天板の下側に配置される寝台支持部と、
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記天板と同一方向に移動する中間部と、を有し、
前記寝台支持部に対して前記中間部が移動する間に、前記天板と前記中間部との相対位置関係を変更させる構成とすることを特徴とするMRI装置。
【請求項10】
前記寝台支持部は第1の移動機構と前記第1の移動機構を動作させる駆動機構とを保持すると共に、前記第1の移動機構と連結された中間部は前記天板と連結された第2の移動機構を保持し、前記駆動機構の駆動によって前記第1の移動機構を動作させ、前記中間部を移動させ、前記第2の移動機構を動作させることによって、前記天板を前記中間部と同一方向に移動させることを特徴とする請求項9に記載のMRI装置。
【請求項11】
前記中間部が所定距離を移動した時に、前記天板を前記所定距離の倍の距離を移動させることを特徴とする請求項9に記載のMRI装置。
【請求項12】
前記天板の前記長手方向の長さは、前記中間部の前記長手方向の長さと比較して長い構成とすることを特徴とする請求項9に記載のMRI装置。
【請求項13】
前記中間部は、前記長手方向に移動できるように前記寝台支持部に保持されることを特徴とする請求項9に記載のMRI装置。
【請求項14】
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重なる位置に、MRI撮影部からの受信信号及び前記MRI撮影部への制御信号のうち少なくとも一方を伝達する伝達部を配置することを特徴とする請求項9に記載のMRI装置。
【請求項15】
前記伝達部は、前記MRI撮影部に有する複数の表面コイルからの受信信号及び前記複数の表面コイルへの制御信号のうち少なくとも一方を伝達することを特徴とする請求項14に記載のMRI装置。
【請求項16】
少なくとも長手方向に移動する天板と、
前記天板の下側に配置される寝台支持部と、
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する第1の中間部と、
前記天板及び前記第1の中間部の間であって前記天板の幅方向の中央からずらした位置に配置され、前記長手方向に移動する第2の中間部と、を有し、
前記寝台支持部に対して前記第1の中間部が移動する間に、前記天板と前記第1の中間部と前記第2の中間部との相対位置関係を変更させる構成とすることを特徴とするMRI装置。
【請求項17】
少なくとも長手方向に移動する天板と、
前記天板の下側に配置される寝台支持部と、
前記天板及び前記寝台支持部の間であって前記天板の幅方向の中央に重ならない位置に配置され、前記長手方向に移動する複数の中間部と、を有し、
前記寝台支持部に対して前記複数の中間部のうち1つの中間部が移動する間に、前記天板と前記複数の中間部との相対位置関係を変更させる構成とすることを特徴とするMRI装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【公開番号】特開2012−110770(P2012−110770A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2012−62448(P2012−62448)
【出願日】平成24年3月19日(2012.3.19)
【分割の表示】特願2006−332416(P2006−332416)の分割
【原出願日】平成18年12月8日(2006.12.8)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成24年3月19日(2012.3.19)
【分割の表示】特願2006−332416(P2006−332416)の分割
【原出願日】平成18年12月8日(2006.12.8)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
[ Back to top ]