
寸法測定用器具および高さゲージ
【課題】寸法を測定するための器具を提供する。
【解決手段】測定軸を画定する線形ガイドと平行に移動することができる可動のキャリッジ40と、可動のキャリッジ40の線形移動を決定するように伝達部材によってキャリッジ40に接続されている駆動装置と、可動のキャリッジ40に固定され、測定対象の部分と接触するように設計されている触覚器と、測定軸に対する触覚器の位置の測定を供給するように構成された位置トランスデューサーと、触覚器と測定対象の部分との接触力を電気信号に直接、変換するためのピエゾ抵抗素子の力センサーを含む。
【解決手段】測定軸を画定する線形ガイドと平行に移動することができる可動のキャリッジ40と、可動のキャリッジ40の線形移動を決定するように伝達部材によってキャリッジ40に接続されている駆動装置と、可動のキャリッジ40に固定され、測定対象の部分と接触するように設計されている触覚器と、測定軸に対する触覚器の位置の測定を供給するように構成された位置トランスデューサーと、触覚器と測定対象の部分との接触力を電気信号に直接、変換するためのピエゾ抵抗素子の力センサーを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は線形軸に沿って寸法を測定するための寸法測定用器具に関するものであり、特に垂直および水平の測定軸に沿って線形の寸法を測定するための器具に関するものであるが、これに限定されるわけではない。
【背景技術】
【0002】
高さゲージや座標を測定するための機械のような測定器具は、高精度な機械部品の寸法を測定し、制御するために用いられる。
該器具は、マイクロメートル単位での精度と再現性を備えた測定を提供するものである。
【0003】
これらの器具によって、相対測定ならびに絶対測定を行うことが可能となる。
一般的に、該器具は、水平の平らな台と、または、測定対象の部分もしくは制御対象の部分が選ばれた位置に置かれる、測定台と組み合わされ、その結果、この共通の要素が、装置と測定対象の部分との間の基準面を構成する。
【0004】
通常、寸法測定機器には、三本の直交する座標軸と、平行に方向付けられた三つのガイドが含まれる。
高さゲージの場合、これらの軸のうち二つは、測定台の平面に刻まれているので無視され、測定台に直角に方向付けられたガイドが、垂直測定軸を構成する。
また、二つの軸が基準面を画定すると考え、その他の軸の一つにしたがった測定を可能にするような他の構成を考えることもできる。
【0005】
これらの装置は、力が作用しても変形しないと考えられている剛性材料で作られた部品を測定するために設計されている。
このことが、これらの装置の適用分野を限定してしまっている。
【0006】
測定支柱では、ガイドは、測定台の上にある、スライドして動かすことのできる底板を備えた剛性の基底またはエアクッションに垂直に留められていることで、測定対象の部分の側面部全体にアクセスできるようになっている。
【0007】
また、測定器具は、一般的に、各測定軸上に固定基準位置目盛、高精度の位置エンコーダ、ならびに電子制御表示装置を有しており、該表示装置は、場合によっては操作者が見ることのできるコンソールに含まれ、一つまたは複数の測定モードにおいて測定された寸法を表示するようになっている。
【0008】
本出願人の名義による欧州特許第0579961号明細書には、垂直ガイド上をスライドする測定キャリッジを備えた高さゲージが記載されている。
測定キャリッジは、測定キャリッジと相対的にスライドする「浮動」駆動キャリッジを具備し、該駆動キャリッジは、測定キャリッジにかかる垂直方向の力を伝達する。
この器具では、測定キャリッジと駆動キャリッジとの接続部は、弾性である。
つまり、両方のキャリッジを接続する、調節されたばねによるシステムが平衡を保ち、同時に、測定の方向を決定し、測定対象の部分との良好な接触を確実にするために、測定キャリッジに作用する接触力が最小になるように保証するのである。
【0009】
例えば、スイス国特許第667726号明細書および欧州特許第0223736号明細書に記載されている、同様の力が作用する装置を備えたその他の測定支柱が知られている。
これらの文献の装置は、駆動モータと測定プローブとの間に弾性の伝達部材を具備し、弾性部材の変形が所定の値に達したとき、つまり測定対象の部分におけるプローブの加圧力が、この所定の値に近づいたときに寸法測定を行うように構成されている。
【0010】
また、例えば米国特許第4924598号明細書の装置も知られているが、この装置では、測定力をセンサープローブに伝達する弾性部材の偏位が、連続的に測定されるのではなく、変形の閾値を超えたときに電気接触によって検出される。
しかし、これらのより単純な装置では測定の間に超過した力を測定することができない。
さらに、この装置では測定の間に測定の条件、特にプローブの加圧力を変動させ、修正することができない。
【発明の概要】
【発明が解決しようとする課題】
【0011】
弾性部材の寸法変形の測定に基づくすべての既知の装置において、該寸法変形は、一般的に、例えば二つのキャリッジ間の相対位置に関する情報を与える電気電位差計または極めて単純なタイプの接触プローブのような移動センサーによって判定されることになる。
しかし、これらの低コストのセンサーは、正確に基準をとった情報を与えず、接触力との完全な対応は提供しないため、いくつかの不都合があり、該センサーのキャリブレーションは、時間とともに変化しがちであり、ほこりならびに水および/またはオイルの付着から守られる必要がある。
【0012】
さらに、既知の浮動キャリッジシステムは、測定の精度に影響を与えうる更なる自由度を有している。
浮動キャリッジの移動は、かなり大きく、システムを安定させるために必要な時間が原因で、素早い測定操作を行うことができない。
【0013】
また、例えば最小値の探索のようなある種の測定操作またはスキャニング操作のためには、測定システムと駆動システムとの間の弾性接続体が測定を遅くすることも知られている。
また、浮動キャリッジ装置は、測定力がわずかにしか変動しないとき、システムが測定の十分な柔軟性をもたらさないため、プローブの位置を細かく調整する間の欠点ともなる。
したがって、システムは、一定の力が平衡する点を絶えず探す必要があり、このため、寸法情報を供給する前に安定化するための一定の時間が絶えず必要となる。
【0014】
二重キャリッジによる測定支柱において、弾性部材は、システムの方向それぞれに特定の調整を必要とする。
すなわち、測定キャリッジの重量は、この弾性システムによって平衡状態に保たれ、したがって、システムの方向の変化によって、これらの弾性部材の修正が必要とされる。
【課題を解決するための手段】
【0015】
本発明の一つの目的は、既知の装置の制限から解放された、寸法を測定するための器具を提案することである。
本発明によると、これらの目的は、特に主たる請求項の対象によって達成される。
【0016】
特に、この解決法は、二つのキャリッジ間の相対的な移動によってなされる間接的、不精確な測定に基づかずに、接触力を直接電気信号に変換するという、先行技術を超える利点を有している。
このことによって、観測軸に沿ってかけられる実際の接触力を測定することができ、誤差を生み出しうる要素の数が有利に削減される。
このように、より小型でより剛性の高い構造と、より良好な測定の精度、位置の変化に対するより早い反応、そして投射に対する良好な電磁波耐性を得ることができる。
【0017】
本発明の器具は、器具の移動線と測定軸に沿って測定するための力センサーを具備している。
好ましくは、力センサーは、両方の移動方向において力の変動を測定できるようにしなければならないため、事前に負荷がかけられている。
様々な直交軸に沿って接触力の方向を判定するために、その他のセンサーを加えることもできるので、この構成は限定的ではない。
【0018】
さらに、本発明の測定器具は、好ましくは、力センサーを保護するために一つまたは複数の追加の弾性接続体または摩擦要素によって駆動力を制限するための装置を含んでいる。
駆動システムの制御部位に位置付けられる第一の追加の弾性部材の一つによって、プローブが測定対象の部分と接触するとき、操作者またはモータによってかけられる力を制限することが可能となる。
測定システムの弾性移動の制限を高め、センサーを保護するために、その他の弾性部材を、力センサーに直列的に加えることができる。
弾性変形は位置の測定に影響を与えないため、これらの保護装置を加えることは限定されない。
また、センサーの許容される変形の限界を超えないように、つまり機械的過負荷を避けるために、停止体および/または力センサーと平行な要素を加えることもできる。
【0019】
接触力を直接読み取ることによって、この基本的な測定パラメータをより良く制御することができる。
実際、接触力は、ある種の材料に、寸法の影響を与えることがあり得る。
したがって、かけられる接触力を細かく測定することによって、異なる接触力の数回の測定から、測定される材料の弾性を補間し、またしたがって測定部分の実際の寸法から材料の弾性を推定して、ゼロ弾性変形に対応するゼロ接触力で達成することが可能となる。
さらに、ゼロ接触力では、器具の測定軸に対して直角ではない面を測定する場合に、測定対象の部分の寸法は、寄生する接触力によって影響されなくなる。
【0020】
有利には、本発明は、力と位置の両方の変動にしたがって行うことができる最適値の向上した探索をもたらす。
測定される寸法の値は、所定の接触力だけに限定されなくなる。
本発明の装置は、接触力の変動にしたがって寸法測定を修正することができるのだが、これは先行技術の器具では不可能である。
また、本装置は、各材料を考慮し、位置構造の修正を必ずしも必要とすることなく、材料の弾性にしたがって値の修正を最適化する。
【0021】
本発明は、垂直測定システムだけに限定されない。
該装置は、水平軸に沿った絶対測定または相対測定にも使用することができ、あるいは、例えば多関節アームの端部で、ボリューム内の、どのような軸に沿った測定にも使うことができる。
接触力に関する測定精度が高いことにより、精度をまったく失うことなく、様々な方向での寸法測定を保証することができる。
該装置の剛性かつ単純な構造により、線形の測定は、もはやシステムのある一定のいくつかの方向だけに限定されなくなり、測定される表面の方向は、もはや基準面と平行な表面に限定されなくなる。
様々な方向において、キャリッジ重量の効果は、センサーの作用点にのみ影響を与えるが、弾性部材のいかなる変更も必要としない。
力センサーに事前に負荷を加えることは、様々な可能な方向に応えるために選択することができ、平衡点を適合させる必要がない。
【0022】
既知の測定支柱は、一般的に基準面に平行な表面の測定に限定されている。
このような表面を測定する装置が、このカテゴリーに含まれない場合、つまり、基準面に関わらずに測定する場合、接触力の方向を識別できなければならない。
これができなければ、接触力は、測定軸に沿って器具によって測定される力を超える可能性がある。
さらに、球形の測定プローブのような測定部材の寸法は、器具の移動軸に対する測定プローブの寸法(投射)を正しく考慮するために、表面の方向を考慮に入れる必要がある。
【0023】
図示していない本発明の実施態様において、本発明のシステムによって、装置の測定軸に相対して、測定表面の法線となる、接触力の方向を識別することができる。
したがって、測定軸に直交する表面に対応した最適な測定力を見つけることができる。
【0024】
その他の力センサーによるもう一つの実施態様では、測定の間にかけられる力を表面の方向に対して適合化するために、各方向に沿った接触力を測定することができる。
【0025】
本発明の実施例は、添付図面に図示した説明に示されている。
【図面の簡単な説明】
【0026】
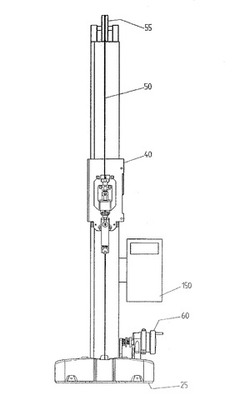
【図1】は、本発明の実施態様にしたがった測定支柱の全体図を示している。
【0027】
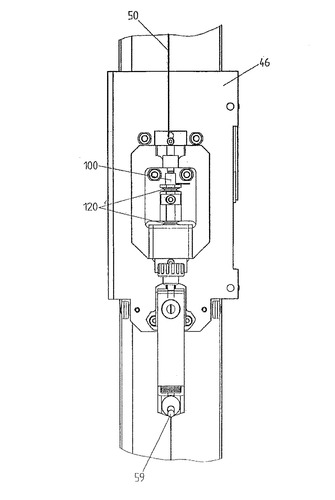
【図2】は、図1の測定支柱のキャリッジの詳細を示している。
【図3】は、図1の測定支柱のキャリッジの詳細を示している。
【0028】
【図4】は、図1の測定支柱の側面図を示している。
【発明を実施するための形態】
【0029】
図1の高さゲージは、基準面に支えられるように設計された底板25と、垂直測定軸を画定する基準位置目盛を含んだ垂直フレーム30を具備している。
キャリッジ40は、垂直フレーム30に沿ってスライドし、該キャリッジの位置は、図面では見えない位置エンコーダによって読み取られる。
位置エンコーダは、好ましくはマイクロメートル単位またはそれより高い精度でキャリッジの位置を読み取ることのできる光学エンコーダである。
しかし、その他の位置測定システムも可能である。
【0030】
キャリッジ40の移動は、力センサー100、上部プーリー55の周りで閉じたループを形成するケーブル50と、図では見えない下部プーリーによって確実に行われる。
下部プーリーは、操作者によって作動することができるハンドル60によって駆動され、これによりキャリッジ40の移動を可能にする。
カウンターウェイト56(図4で図示)は、キャリッジの重量とのバランスをとる。
プローブ59は、好ましくは交換可能であり、測定対象の表面と接触させる。
【0031】
図示していない本発明の実施態様によると、キャリッジ40の移動は、部分的に伸縮手段を備えた下部プーリーまたは上部プーリーを駆動する電気モータによって確実に行われる。
選択的には、ケーブルは、ベルトまたは金属バンド、あるいは適切で柔軟な伝達要素であればどのようなものでも置き換えることができる。
【0032】
力センサー100は、例えば、ピエゾ抵抗素子の歪みゲージシステム、チャージ・セル・センサーまたはその他の適切なセンサー、並びに、ケーブル50とキャリッジ40との間の各側部に間置された少なくとも一つの弾性部材120から成る。
弾性部材120は、力センサー100に事前にかけられる負荷に影響する。
このシステムによって、接触力を測定軸に沿った両方の方向で測定することができる。
プローブ59にかけられる測定力は、力センサーによって直接読み取られる。
該力センサーは、接触力を示す電気信号を生成し、この情報を測定コンソール150に伝送する。
また、弾性部材は、力センサーを保護する機能も有しており、制御された仕方で、システムの弾性移動の限界を高める。
【0033】
好ましくは、測定コンソール150は、測定軸に沿って測定された寸法とセンサーによって測定された接触力を自動的に表示するための表示手段、並びに、例えばキーボードのような制御およびデータ入力手段を含んでいる。
好ましくは、測定コンソール150は、測定された力が望まれる標的値に達したことを操作者に伝えるための音響警告装置を含んでおり、該測定コンソールは、この望まれる接触力に対応する高さの測定値を記憶する。
より好ましくは、測定コンソールは、例えばデジタル・プロセッサのような計算手段を含み、該計算手段は、キャリッジ40の位置エンコーダと力センサー100からのデータを読み取り、該計算手段の記憶装置に保存されているプログラムにしたがって、測定結果を、例えば直径、中心点、逆転位置、平行度、弾性の測定結果、測定された表面の方向の探索結果などを供給するように構成されている。
【0034】
図示した実施態様では、測定コンソール150は、これらすべての構成要素、つまり、ディスプレイ、キーボード、プロセッサなどが収納されているケースを有する。
しかし、これは本発明の限定的特徴ではなく、本発明には、これらの構成要素が、例えば基底もしくはフレームに、または、測定器具に接続された例えばコンピュータのような外部装置に、異なる形で配置されている測定器具が含まれる。
【0035】
本発明の電動化版では、測定コンソールは、駆動モータの制御ユニットも含んでおり、該制御ユニットは、プログラムにしたがって、例えば力センサー100からの力に関する電気信号にしたがってモータを制御する。
制御ユニットは、例えば、力センサーによって測定された接触力を、所定の値に安定させるようにプログラムされている。
本発明の手動版では、好ましくは、接触力に関する触覚的なフィードバックを操作者に与える弾性結合体を備えたハンドルが含まれる。
【0036】
本発明の一つの実施態様では、制御ユニットは、様々な測定モードにしたがって位置を測定できるようにプログラムされており、接触力をコントロールするための様々な方法を有することを特徴としている。
主として、所定値モード、区間値モードおよび瞬時値モードという三つの操作モードを区別することができ、またはこれらのモードのあらゆる組み合わせを有する。
所定値モードでは、固定された力の値または操作者によって設定された力の値で測定を行うことができる。
力が到達し、安定したときに位置が測定される。
区間値モードでは、接触点の極めて精密な測定をしようとすることなく、素早い測定が可能となる。
このモードは、所定値モードに匹敵するものであるが、要求される安定化の時間が短い。
瞬時値モードでは、操作者は測定部分との接触から即座に素早い測定を行うことができる。
これにより、測定が開始されるとすぐに力と位置の測定が達成される。
複合モードは、例えば区間値間のトリガ閾値と瞬時測定とを組み合わせることで行うことができ、これにより、所定の接触力値区間にとどまっている間に力/位置のペアを知ることが可能となる。
【0037】
本発明の好ましい実施態様によると、制御ユニットは、接触力の様々な値に対する、同一の接触点について複数の測定を行うようにプログラムされており、これにより、ゼロに等しい接触力での対応する測定を推定することが可能となる。
また、これによって材料のタイプを判定し、測定された材料の弾性を測定することも可能となる。
また、所定の弾性値から出発して、様々な接触力での測定により、様々な測定点で測定された弾性値の変動を比較することで、測定表面に対する法線を求めることができる。
これによって、測定軸に投射された接触方向においてプローブの寸法を考慮することが可能となる。
【0038】
本発明の変形例によると、プローブの固定システムは、器具の測定軸に直交する力を測定するための、少なくとも一つの第二の力センサーを具備している。
したがって、測定軸と相対的に測定表面に対する法線軸の方向を決定することができる。
これにより、したがって、接触力が器具の移動軸に沿って測定される力と結合されなくなるため、接触力を既知の値に維持することが可能となる。
このシステムによって、測定される表面の方向がどうであれ、測定軸で観測されるプローブの正しい寸法を考慮することが可能となる。
【0039】
本発明の変形例によると、二次元または三次元表示での座標点を得るために、測定プログラムは各直交軸に沿って一連の連続する測定を行う。
【0040】
本発明の実施態様によると、測定プログラムは、測定対象部分の既知の基準点に対して測定を行う。
器具の方向は、測定対象の点が器具の移動軸上に位置するように選択され、これにより、測定される面それぞれの方向を考慮しながら、制御時間を最適化することが可能となる。
【符号の説明】
【0041】
25 底板
30 垂直フレーム
40 キャリッジ
50 ケーブル
55 上部プーリー
60 ハンドル
56 カウンターウェイト
59 プローブ
100 力センサー
120 弾性部材
150 測定コンソール
【先行技術文献】
【特許文献】
【0042】
【特許文献1】欧州特許第0579961号明細書
【特許文献2】スイス国特許第667726号明細書
【特許文献3】欧州特許第0223736号明細書
【特許文献4】米国特許第4924598号明細書
【技術分野】
【0001】
本発明は線形軸に沿って寸法を測定するための寸法測定用器具に関するものであり、特に垂直および水平の測定軸に沿って線形の寸法を測定するための器具に関するものであるが、これに限定されるわけではない。
【背景技術】
【0002】
高さゲージや座標を測定するための機械のような測定器具は、高精度な機械部品の寸法を測定し、制御するために用いられる。
該器具は、マイクロメートル単位での精度と再現性を備えた測定を提供するものである。
【0003】
これらの器具によって、相対測定ならびに絶対測定を行うことが可能となる。
一般的に、該器具は、水平の平らな台と、または、測定対象の部分もしくは制御対象の部分が選ばれた位置に置かれる、測定台と組み合わされ、その結果、この共通の要素が、装置と測定対象の部分との間の基準面を構成する。
【0004】
通常、寸法測定機器には、三本の直交する座標軸と、平行に方向付けられた三つのガイドが含まれる。
高さゲージの場合、これらの軸のうち二つは、測定台の平面に刻まれているので無視され、測定台に直角に方向付けられたガイドが、垂直測定軸を構成する。
また、二つの軸が基準面を画定すると考え、その他の軸の一つにしたがった測定を可能にするような他の構成を考えることもできる。
【0005】
これらの装置は、力が作用しても変形しないと考えられている剛性材料で作られた部品を測定するために設計されている。
このことが、これらの装置の適用分野を限定してしまっている。
【0006】
測定支柱では、ガイドは、測定台の上にある、スライドして動かすことのできる底板を備えた剛性の基底またはエアクッションに垂直に留められていることで、測定対象の部分の側面部全体にアクセスできるようになっている。
【0007】
また、測定器具は、一般的に、各測定軸上に固定基準位置目盛、高精度の位置エンコーダ、ならびに電子制御表示装置を有しており、該表示装置は、場合によっては操作者が見ることのできるコンソールに含まれ、一つまたは複数の測定モードにおいて測定された寸法を表示するようになっている。
【0008】
本出願人の名義による欧州特許第0579961号明細書には、垂直ガイド上をスライドする測定キャリッジを備えた高さゲージが記載されている。
測定キャリッジは、測定キャリッジと相対的にスライドする「浮動」駆動キャリッジを具備し、該駆動キャリッジは、測定キャリッジにかかる垂直方向の力を伝達する。
この器具では、測定キャリッジと駆動キャリッジとの接続部は、弾性である。
つまり、両方のキャリッジを接続する、調節されたばねによるシステムが平衡を保ち、同時に、測定の方向を決定し、測定対象の部分との良好な接触を確実にするために、測定キャリッジに作用する接触力が最小になるように保証するのである。
【0009】
例えば、スイス国特許第667726号明細書および欧州特許第0223736号明細書に記載されている、同様の力が作用する装置を備えたその他の測定支柱が知られている。
これらの文献の装置は、駆動モータと測定プローブとの間に弾性の伝達部材を具備し、弾性部材の変形が所定の値に達したとき、つまり測定対象の部分におけるプローブの加圧力が、この所定の値に近づいたときに寸法測定を行うように構成されている。
【0010】
また、例えば米国特許第4924598号明細書の装置も知られているが、この装置では、測定力をセンサープローブに伝達する弾性部材の偏位が、連続的に測定されるのではなく、変形の閾値を超えたときに電気接触によって検出される。
しかし、これらのより単純な装置では測定の間に超過した力を測定することができない。
さらに、この装置では測定の間に測定の条件、特にプローブの加圧力を変動させ、修正することができない。
【発明の概要】
【発明が解決しようとする課題】
【0011】
弾性部材の寸法変形の測定に基づくすべての既知の装置において、該寸法変形は、一般的に、例えば二つのキャリッジ間の相対位置に関する情報を与える電気電位差計または極めて単純なタイプの接触プローブのような移動センサーによって判定されることになる。
しかし、これらの低コストのセンサーは、正確に基準をとった情報を与えず、接触力との完全な対応は提供しないため、いくつかの不都合があり、該センサーのキャリブレーションは、時間とともに変化しがちであり、ほこりならびに水および/またはオイルの付着から守られる必要がある。
【0012】
さらに、既知の浮動キャリッジシステムは、測定の精度に影響を与えうる更なる自由度を有している。
浮動キャリッジの移動は、かなり大きく、システムを安定させるために必要な時間が原因で、素早い測定操作を行うことができない。
【0013】
また、例えば最小値の探索のようなある種の測定操作またはスキャニング操作のためには、測定システムと駆動システムとの間の弾性接続体が測定を遅くすることも知られている。
また、浮動キャリッジ装置は、測定力がわずかにしか変動しないとき、システムが測定の十分な柔軟性をもたらさないため、プローブの位置を細かく調整する間の欠点ともなる。
したがって、システムは、一定の力が平衡する点を絶えず探す必要があり、このため、寸法情報を供給する前に安定化するための一定の時間が絶えず必要となる。
【0014】
二重キャリッジによる測定支柱において、弾性部材は、システムの方向それぞれに特定の調整を必要とする。
すなわち、測定キャリッジの重量は、この弾性システムによって平衡状態に保たれ、したがって、システムの方向の変化によって、これらの弾性部材の修正が必要とされる。
【課題を解決するための手段】
【0015】
本発明の一つの目的は、既知の装置の制限から解放された、寸法を測定するための器具を提案することである。
本発明によると、これらの目的は、特に主たる請求項の対象によって達成される。
【0016】
特に、この解決法は、二つのキャリッジ間の相対的な移動によってなされる間接的、不精確な測定に基づかずに、接触力を直接電気信号に変換するという、先行技術を超える利点を有している。
このことによって、観測軸に沿ってかけられる実際の接触力を測定することができ、誤差を生み出しうる要素の数が有利に削減される。
このように、より小型でより剛性の高い構造と、より良好な測定の精度、位置の変化に対するより早い反応、そして投射に対する良好な電磁波耐性を得ることができる。
【0017】
本発明の器具は、器具の移動線と測定軸に沿って測定するための力センサーを具備している。
好ましくは、力センサーは、両方の移動方向において力の変動を測定できるようにしなければならないため、事前に負荷がかけられている。
様々な直交軸に沿って接触力の方向を判定するために、その他のセンサーを加えることもできるので、この構成は限定的ではない。
【0018】
さらに、本発明の測定器具は、好ましくは、力センサーを保護するために一つまたは複数の追加の弾性接続体または摩擦要素によって駆動力を制限するための装置を含んでいる。
駆動システムの制御部位に位置付けられる第一の追加の弾性部材の一つによって、プローブが測定対象の部分と接触するとき、操作者またはモータによってかけられる力を制限することが可能となる。
測定システムの弾性移動の制限を高め、センサーを保護するために、その他の弾性部材を、力センサーに直列的に加えることができる。
弾性変形は位置の測定に影響を与えないため、これらの保護装置を加えることは限定されない。
また、センサーの許容される変形の限界を超えないように、つまり機械的過負荷を避けるために、停止体および/または力センサーと平行な要素を加えることもできる。
【0019】
接触力を直接読み取ることによって、この基本的な測定パラメータをより良く制御することができる。
実際、接触力は、ある種の材料に、寸法の影響を与えることがあり得る。
したがって、かけられる接触力を細かく測定することによって、異なる接触力の数回の測定から、測定される材料の弾性を補間し、またしたがって測定部分の実際の寸法から材料の弾性を推定して、ゼロ弾性変形に対応するゼロ接触力で達成することが可能となる。
さらに、ゼロ接触力では、器具の測定軸に対して直角ではない面を測定する場合に、測定対象の部分の寸法は、寄生する接触力によって影響されなくなる。
【0020】
有利には、本発明は、力と位置の両方の変動にしたがって行うことができる最適値の向上した探索をもたらす。
測定される寸法の値は、所定の接触力だけに限定されなくなる。
本発明の装置は、接触力の変動にしたがって寸法測定を修正することができるのだが、これは先行技術の器具では不可能である。
また、本装置は、各材料を考慮し、位置構造の修正を必ずしも必要とすることなく、材料の弾性にしたがって値の修正を最適化する。
【0021】
本発明は、垂直測定システムだけに限定されない。
該装置は、水平軸に沿った絶対測定または相対測定にも使用することができ、あるいは、例えば多関節アームの端部で、ボリューム内の、どのような軸に沿った測定にも使うことができる。
接触力に関する測定精度が高いことにより、精度をまったく失うことなく、様々な方向での寸法測定を保証することができる。
該装置の剛性かつ単純な構造により、線形の測定は、もはやシステムのある一定のいくつかの方向だけに限定されなくなり、測定される表面の方向は、もはや基準面と平行な表面に限定されなくなる。
様々な方向において、キャリッジ重量の効果は、センサーの作用点にのみ影響を与えるが、弾性部材のいかなる変更も必要としない。
力センサーに事前に負荷を加えることは、様々な可能な方向に応えるために選択することができ、平衡点を適合させる必要がない。
【0022】
既知の測定支柱は、一般的に基準面に平行な表面の測定に限定されている。
このような表面を測定する装置が、このカテゴリーに含まれない場合、つまり、基準面に関わらずに測定する場合、接触力の方向を識別できなければならない。
これができなければ、接触力は、測定軸に沿って器具によって測定される力を超える可能性がある。
さらに、球形の測定プローブのような測定部材の寸法は、器具の移動軸に対する測定プローブの寸法(投射)を正しく考慮するために、表面の方向を考慮に入れる必要がある。
【0023】
図示していない本発明の実施態様において、本発明のシステムによって、装置の測定軸に相対して、測定表面の法線となる、接触力の方向を識別することができる。
したがって、測定軸に直交する表面に対応した最適な測定力を見つけることができる。
【0024】
その他の力センサーによるもう一つの実施態様では、測定の間にかけられる力を表面の方向に対して適合化するために、各方向に沿った接触力を測定することができる。
【0025】
本発明の実施例は、添付図面に図示した説明に示されている。
【図面の簡単な説明】
【0026】
【図1】は、本発明の実施態様にしたがった測定支柱の全体図を示している。
【0027】
【図2】は、図1の測定支柱のキャリッジの詳細を示している。
【図3】は、図1の測定支柱のキャリッジの詳細を示している。
【0028】
【図4】は、図1の測定支柱の側面図を示している。
【発明を実施するための形態】
【0029】
図1の高さゲージは、基準面に支えられるように設計された底板25と、垂直測定軸を画定する基準位置目盛を含んだ垂直フレーム30を具備している。
キャリッジ40は、垂直フレーム30に沿ってスライドし、該キャリッジの位置は、図面では見えない位置エンコーダによって読み取られる。
位置エンコーダは、好ましくはマイクロメートル単位またはそれより高い精度でキャリッジの位置を読み取ることのできる光学エンコーダである。
しかし、その他の位置測定システムも可能である。
【0030】
キャリッジ40の移動は、力センサー100、上部プーリー55の周りで閉じたループを形成するケーブル50と、図では見えない下部プーリーによって確実に行われる。
下部プーリーは、操作者によって作動することができるハンドル60によって駆動され、これによりキャリッジ40の移動を可能にする。
カウンターウェイト56(図4で図示)は、キャリッジの重量とのバランスをとる。
プローブ59は、好ましくは交換可能であり、測定対象の表面と接触させる。
【0031】
図示していない本発明の実施態様によると、キャリッジ40の移動は、部分的に伸縮手段を備えた下部プーリーまたは上部プーリーを駆動する電気モータによって確実に行われる。
選択的には、ケーブルは、ベルトまたは金属バンド、あるいは適切で柔軟な伝達要素であればどのようなものでも置き換えることができる。
【0032】
力センサー100は、例えば、ピエゾ抵抗素子の歪みゲージシステム、チャージ・セル・センサーまたはその他の適切なセンサー、並びに、ケーブル50とキャリッジ40との間の各側部に間置された少なくとも一つの弾性部材120から成る。
弾性部材120は、力センサー100に事前にかけられる負荷に影響する。
このシステムによって、接触力を測定軸に沿った両方の方向で測定することができる。
プローブ59にかけられる測定力は、力センサーによって直接読み取られる。
該力センサーは、接触力を示す電気信号を生成し、この情報を測定コンソール150に伝送する。
また、弾性部材は、力センサーを保護する機能も有しており、制御された仕方で、システムの弾性移動の限界を高める。
【0033】
好ましくは、測定コンソール150は、測定軸に沿って測定された寸法とセンサーによって測定された接触力を自動的に表示するための表示手段、並びに、例えばキーボードのような制御およびデータ入力手段を含んでいる。
好ましくは、測定コンソール150は、測定された力が望まれる標的値に達したことを操作者に伝えるための音響警告装置を含んでおり、該測定コンソールは、この望まれる接触力に対応する高さの測定値を記憶する。
より好ましくは、測定コンソールは、例えばデジタル・プロセッサのような計算手段を含み、該計算手段は、キャリッジ40の位置エンコーダと力センサー100からのデータを読み取り、該計算手段の記憶装置に保存されているプログラムにしたがって、測定結果を、例えば直径、中心点、逆転位置、平行度、弾性の測定結果、測定された表面の方向の探索結果などを供給するように構成されている。
【0034】
図示した実施態様では、測定コンソール150は、これらすべての構成要素、つまり、ディスプレイ、キーボード、プロセッサなどが収納されているケースを有する。
しかし、これは本発明の限定的特徴ではなく、本発明には、これらの構成要素が、例えば基底もしくはフレームに、または、測定器具に接続された例えばコンピュータのような外部装置に、異なる形で配置されている測定器具が含まれる。
【0035】
本発明の電動化版では、測定コンソールは、駆動モータの制御ユニットも含んでおり、該制御ユニットは、プログラムにしたがって、例えば力センサー100からの力に関する電気信号にしたがってモータを制御する。
制御ユニットは、例えば、力センサーによって測定された接触力を、所定の値に安定させるようにプログラムされている。
本発明の手動版では、好ましくは、接触力に関する触覚的なフィードバックを操作者に与える弾性結合体を備えたハンドルが含まれる。
【0036】
本発明の一つの実施態様では、制御ユニットは、様々な測定モードにしたがって位置を測定できるようにプログラムされており、接触力をコントロールするための様々な方法を有することを特徴としている。
主として、所定値モード、区間値モードおよび瞬時値モードという三つの操作モードを区別することができ、またはこれらのモードのあらゆる組み合わせを有する。
所定値モードでは、固定された力の値または操作者によって設定された力の値で測定を行うことができる。
力が到達し、安定したときに位置が測定される。
区間値モードでは、接触点の極めて精密な測定をしようとすることなく、素早い測定が可能となる。
このモードは、所定値モードに匹敵するものであるが、要求される安定化の時間が短い。
瞬時値モードでは、操作者は測定部分との接触から即座に素早い測定を行うことができる。
これにより、測定が開始されるとすぐに力と位置の測定が達成される。
複合モードは、例えば区間値間のトリガ閾値と瞬時測定とを組み合わせることで行うことができ、これにより、所定の接触力値区間にとどまっている間に力/位置のペアを知ることが可能となる。
【0037】
本発明の好ましい実施態様によると、制御ユニットは、接触力の様々な値に対する、同一の接触点について複数の測定を行うようにプログラムされており、これにより、ゼロに等しい接触力での対応する測定を推定することが可能となる。
また、これによって材料のタイプを判定し、測定された材料の弾性を測定することも可能となる。
また、所定の弾性値から出発して、様々な接触力での測定により、様々な測定点で測定された弾性値の変動を比較することで、測定表面に対する法線を求めることができる。
これによって、測定軸に投射された接触方向においてプローブの寸法を考慮することが可能となる。
【0038】
本発明の変形例によると、プローブの固定システムは、器具の測定軸に直交する力を測定するための、少なくとも一つの第二の力センサーを具備している。
したがって、測定軸と相対的に測定表面に対する法線軸の方向を決定することができる。
これにより、したがって、接触力が器具の移動軸に沿って測定される力と結合されなくなるため、接触力を既知の値に維持することが可能となる。
このシステムによって、測定される表面の方向がどうであれ、測定軸で観測されるプローブの正しい寸法を考慮することが可能となる。
【0039】
本発明の変形例によると、二次元または三次元表示での座標点を得るために、測定プログラムは各直交軸に沿って一連の連続する測定を行う。
【0040】
本発明の実施態様によると、測定プログラムは、測定対象部分の既知の基準点に対して測定を行う。
器具の方向は、測定対象の点が器具の移動軸上に位置するように選択され、これにより、測定される面それぞれの方向を考慮しながら、制御時間を最適化することが可能となる。
【符号の説明】
【0041】
25 底板
30 垂直フレーム
40 キャリッジ
50 ケーブル
55 上部プーリー
60 ハンドル
56 カウンターウェイト
59 プローブ
100 力センサー
120 弾性部材
150 測定コンソール
【先行技術文献】
【特許文献】
【0042】
【特許文献1】欧州特許第0579961号明細書
【特許文献2】スイス国特許第667726号明細書
【特許文献3】欧州特許第0223736号明細書
【特許文献4】米国特許第4924598号明細書
【特許請求の範囲】
【請求項1】
寸法を測定するための器具であり、
測定軸を画定する基準位置目盛を担持する線形ガイドと、
前記線形ガイドと平行に移動することのできる可動のキャリッジと、
可動のキャリッジの線形移動を決定するために、伝達部材によってキャリッジに接続されている駆動装置と、
前記可動キャリッジに固定され、測定対象の部分と接触するように設計されている触覚器と、
測定軸に対する触覚器の位置の測定を供給するためにキャリッジに配置されている位置トランスデューサー、
を備えた器具であって、
キャリッジが、プローブにより測定対象の部分にかけられる接触力を測定することができる少なくとも一つの力センサーを介して駆動装置に接続されていることを特徴とする器具。
【請求項2】
力センサーが、ピエゾ抵抗素子または歪みゲージを含んでいる、請求項1に記載の器具。
【請求項3】
力センサーが、システムの弾性移動の限界を高める一つまたは複数の弾性部材を具備した組立装置に組み込まれている、請求項1に記載の器具。
【請求項4】
前記駆動装置に作用する、または前記駆動装置内に具備されているモータと、接触力の測定にしたがってモータを制御し、測定された接触力を所定の値に安定化させるように構成された制御ユニットとを含む、請求項1に記載の器具。
【請求項5】
駆動装置が、操作者によって手動で作動させることができ、かけられている接触力を操作者に表示することのできる表示装置を具備している、請求項1に記載の器具。
【請求項6】
触覚器プローブの折り返し点を自動的に発見するように構成されている、請求項1に記載の器具。
【請求項7】
複数の接触力の値から一部分の複数の高さ測定を判定し、ゼロに等しい接触力に対応する測定を推定するように構成されている、請求項1に記載の器具。
【請求項8】
力センサーが、停止体および/またはシステムの弾性移動の限界を高める弾性部材によって機械的過負荷に対して保護されていること、および、力センサーが、測定軸の両方の方向に沿った測定を可能にするために、事前に負荷をかけられていることを特徴とする、請求項1に記載の器具。
【請求項9】
測定対象の部分の弾性変形を判定し、最小化することができる、請求項1に記載の器具。
【請求項10】
接触力の方向を判定するために、器具の測定軸に直交する軸の一つに沿って配置された少なくとも一つの第二の力センサーを含んでいる、請求項1に記載の器具。
【請求項11】
垂直の寸法を測定する高さゲージから成り、前記線形ガイドが底板に垂直に接続された垂直フレームである、請求項1に記載の器具。
【請求項1】
寸法を測定するための器具であり、
測定軸を画定する基準位置目盛を担持する線形ガイドと、
前記線形ガイドと平行に移動することのできる可動のキャリッジと、
可動のキャリッジの線形移動を決定するために、伝達部材によってキャリッジに接続されている駆動装置と、
前記可動キャリッジに固定され、測定対象の部分と接触するように設計されている触覚器と、
測定軸に対する触覚器の位置の測定を供給するためにキャリッジに配置されている位置トランスデューサー、
を備えた器具であって、
キャリッジが、プローブにより測定対象の部分にかけられる接触力を測定することができる少なくとも一つの力センサーを介して駆動装置に接続されていることを特徴とする器具。
【請求項2】
力センサーが、ピエゾ抵抗素子または歪みゲージを含んでいる、請求項1に記載の器具。
【請求項3】
力センサーが、システムの弾性移動の限界を高める一つまたは複数の弾性部材を具備した組立装置に組み込まれている、請求項1に記載の器具。
【請求項4】
前記駆動装置に作用する、または前記駆動装置内に具備されているモータと、接触力の測定にしたがってモータを制御し、測定された接触力を所定の値に安定化させるように構成された制御ユニットとを含む、請求項1に記載の器具。
【請求項5】
駆動装置が、操作者によって手動で作動させることができ、かけられている接触力を操作者に表示することのできる表示装置を具備している、請求項1に記載の器具。
【請求項6】
触覚器プローブの折り返し点を自動的に発見するように構成されている、請求項1に記載の器具。
【請求項7】
複数の接触力の値から一部分の複数の高さ測定を判定し、ゼロに等しい接触力に対応する測定を推定するように構成されている、請求項1に記載の器具。
【請求項8】
力センサーが、停止体および/またはシステムの弾性移動の限界を高める弾性部材によって機械的過負荷に対して保護されていること、および、力センサーが、測定軸の両方の方向に沿った測定を可能にするために、事前に負荷をかけられていることを特徴とする、請求項1に記載の器具。
【請求項9】
測定対象の部分の弾性変形を判定し、最小化することができる、請求項1に記載の器具。
【請求項10】
接触力の方向を判定するために、器具の測定軸に直交する軸の一つに沿って配置された少なくとも一つの第二の力センサーを含んでいる、請求項1に記載の器具。
【請求項11】
垂直の寸法を測定する高さゲージから成り、前記線形ガイドが底板に垂直に接続された垂直フレームである、請求項1に記載の器具。
【図1】



【図2】
【図3】

【図4】

【図2】
【図3】
【図4】
【公開番号】特開2010−266438(P2010−266438A)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【外国語出願】
【出願番号】特願2010−106943(P2010−106943)
【出願日】平成22年5月7日(2010.5.7)
【出願人】(503395793)
【氏名又は名称原語表記】TESA S.A.
【Fターム(参考)】
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2010−106943(P2010−106943)
【出願日】平成22年5月7日(2010.5.7)
【出願人】(503395793)
【氏名又は名称原語表記】TESA S.A.
【Fターム(参考)】
[ Back to top ]