
寸法計測方法、撮像装置、制御装置および寸法計測装置
【課題】高速オートフォーカス機構を用いて、エリア型撮像装置を測定対象に高速でかつ正確にオートフォーカスさせること。
【解決手段】本寸法計測方法は、寸法計測位置教示時に、撮像エリア内で測定対象外に設定した基準領域に対し高速オートフォーカス機構が結像する結像位置と、撮像エリア内の測定対象に対しエリア型撮像装置が結像する結像位置との差(補正値)を得る工程を実施し、寸法計測時に、エリア型撮像装置の結像位置を、高速オートフォーカス機構により得られた結像位置から上記補正値だけ補正した位置に設定する工程を実施する。
【解決手段】本寸法計測方法は、寸法計測位置教示時に、撮像エリア内で測定対象外に設定した基準領域に対し高速オートフォーカス機構が結像する結像位置と、撮像エリア内の測定対象に対しエリア型撮像装置が結像する結像位置との差(補正値)を得る工程を実施し、寸法計測時に、エリア型撮像装置の結像位置を、高速オートフォーカス機構により得られた結像位置から上記補正値だけ補正した位置に設定する工程を実施する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、サブミクロンオーダーに微細加工される半導体集積回路やそれに付随するエッチング製品等の測定対象をエリア型撮像装置で撮像し、その撮像画像を処理して当該測定対象の寸法を計測する寸法計測方法およびこの方法の実施に用いる撮像装置、制御装置ならびにこれらの組み合わせに係る寸法計測装置に関する。
【背景技術】
【0002】
エリア型撮像装置はCCDを二次元配列してなる撮像面を備え、撮像エリア内の測定対象をレンズ系でその撮像面に結像するようになっている。このようなエリア型撮像装置で測定対象の寸法計測を正確に行うには測定対象を撮像面に合焦(フォーカス)させることが必要である。このようなフォーカス動作を自動的に行うオートフォーカス(自動合焦制御)機構や(特許文献1、2参照)、さらには自動かつ高速で行う高速オートフォーカス機構も提案されている(特許文献3参照)。
【0003】
ところで、エリア型撮像装置を用いて測定対象の寸法計測を行うに際してエリア型撮像装置の撮像面に測定対象像をオートフォーカスさせる方式として、測定対象の寸法測定面に垂直な方向にエリア型撮像装置を2箇所以上に移動しそれぞれの移動位置で測定対象を撮像し、これら撮像に係る画像の処理によりエリア型撮像装置が測定対象に対してオートフォーカスする位置を演算し、その演算に従いエリア型撮像装置を結像位置に移動させる方式がある。しかしながら、この方式では、撮像、移動、演算を繰り返し実施する必要があり、エリア型撮像装置をオートフォーカスさせるまでの処理に時間がかかっていた。
【特許文献1】特開平7−105547
【特許文献2】特開平5−122582
【特許文献3】特表2005−525550
【発明の開示】
【発明が解決しようとする課題】
【0004】
したがって、本発明により解決すべき課題は、エリア型撮像装置のオートフォーカスを高速に行うことができるようにすることである。
【課題を解決するための手段】
【0005】
(1)本発明による寸法計測方法は、撮像エリア内の測定対象を撮像するエリア型撮像装置と、撮像エリアのオートフォーカス動作を高速で行う高速オートフォーカス機構とを一体として使用する、測定対象の寸法を計測する方法であって、寸法計測位置教示時に、測定対象の近傍に設定した基準領域が高速オートフォーカス機構に結像する、高速オートフォーカス機構の位置を求めるステップと、上記ステップで得た位置(第1結像位置)を第1記憶領域に記憶するステップと、撮像エリア内の測定対象がエリア型撮像装置に結像する、エリア型撮像装置の位置を求めるステップと、このステップで得た位置(第2結像位置)を第2記憶領域に記憶するステップと、第1、第2記憶領域にそれぞれ記憶している第1、第2結像位置の差を演算するステップと、この演算した値を補正値として第3記憶領域に記憶するステップと、を実施し、寸法計測時に、測定対象の近傍に設定した基準領域が高速オートフォーカス機構に結像する、高速オートフォーカス機構の位置を求めるステップと、上記ステップで得た第1結像位置から第3記憶領域に記憶されている上記補正値だけエリア型撮像装置の位置を補正するステップと、を実施する、ことを特徴とするものである。
【0006】
本発明によると、測定対象の近傍に設定した基準領域が高速オートフォーカス機構に結像する、高速オートフォーカス機構の位置と、撮像エリア内の測定対象がエリア型撮像装置に結像する、エリア型撮像装置の位置とが一致していない場合でも、寸法計測時には、撮像エリア内に設定した基準領域が高速オートフォーカス機構に結像する、高速オートフォーカス機構の位置を求めるステップと、上記ステップで得た第1結像位置から第3記憶領域に記憶されている上記補正値だけエリア型撮像装置の位置を補正するステップと、を実施するのみで、エリア型撮像装置を測定対象に高速でオートフォーカスさせられる。
【0007】
(2)測定対象が、基板上にエッチングにより形成されたパターンであることが好ましい。
【0008】
(3)上記基準領域の形状が、点状、線状、面状のいずれかの形状であることが好ましい。基準領域に凹凸がある場合では、線状や面状とし、高速オートフォーカス機構からのオートフォーカス信号の平均値からその凹凸の影響を軽減することができる。
【0009】
(4)寸法計測位置教示および寸法計測時に、上記基板を、直交二次元XY座標系内を移動可能な移動テーブル上に配置するステップと、上記配置した基板上における測定対象のXY座標系内での位置を検出するステップと、上記検出からエリア型撮像装置をXY座標系内を移動させて測定対象に対する撮像位置を設定するステップと、をそれぞれ実施してエリア型撮像装置および高速オートフォーカス機構を撮像エリアに移動することが好ましい。
【0010】
基板上の測定対象の位置情報を正確に制御装置等のコンピュータに伝送することができ、寸法計測をより高速かつ正確に実施することができるようになる。
【0011】
(5)本発明による撮像装置は、撮像基台上を直交二次元XY座標系内のX軸方向に移動可能とされた移動テーブルと、上記移動テーブル上に位置決めされた基板上をY軸方向に移動可能とされたエリア型撮像装置と、上記エリア型撮像装置と一体に移動可能とされて基板上の基準領域にオートフォーカス可能に配置された高速オートフォーカス機構と、を備えることを特徴とするものである。
【0012】
(6)本発明による制御装置は、上記(5)に記載の撮像装置を制御するコンピュータ内蔵制御装置であって、当該コンピュータは、上記(1)ないし(4)のいずれかに記載の寸法計測方法を実施するよう上記撮像装置内のエリア型撮像装置と高速オートフォーカス機構とを制御するためのコンピュータプログラムを搭載している、ことを特徴とするものである。
【0013】
(7)本発明による寸法計測装置は、上記(5)に記載の撮像装置と、上記(6)に記載の制御装置とを組み合わせてなることを特徴とするものである。
【発明の効果】
【0014】
本発明によれば、高速オートフォーカス機構を用いてエリア型撮像装置を測定対象に高速でかつ正確にオートフォーカスさせることができる。
【発明を実施するための最良の形態】
【0015】
以下、添付した図面を参照して本発明の実施の形態に係る寸法計測方法を詳細に説明する。
【0016】
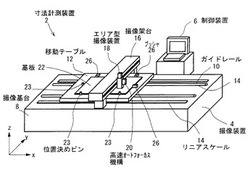
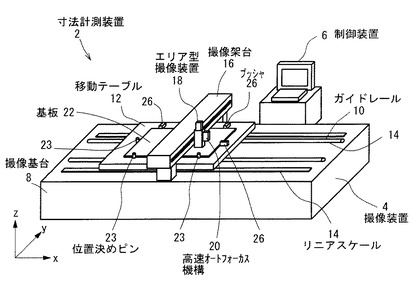
図1は、同寸法計測方法を実施するために用いる寸法計測装置と該寸法計測装置を制御する制御装置との概略構成を示す斜視図、図2は、同寸法計測装置の平面図である。図1はX軸方向、Y軸方向、Z軸方向が示されている。これら各軸は互いに直交している。寸法計測装置2は、測定対象を撮像するための撮像装置4と、撮像装置4を制御するコンピュータ内蔵の制御装置6とから構成されている。撮像装置4と制御装置6は、相互に情報伝送可能に接続されている。制御装置6は撮像装置4が撮像した画像から寸法を演算する機能も備える。
【0017】
撮像装置4は、X軸方向長手でY軸方向一定幅の平面視矩形形状の撮像基台8を備える。撮像基台8上にはX軸方向に互いに平行に延びる一対のガイドレール10が設けられている。この一対のガイドレール10に矩形平板形状の移動テーブル12がX軸方向に移動可能になっている。移動テーブル12には、図示略のエンコーダが一体的に設置されている。ガイドレール10に沿って設けられたリニアスケール14とエンコーダとによって、移動テーブル12のX軸方向の移動量を測定することができる。図示略のエンコーダには、投光部と受光部が備えられ、投光部から出射されてリニアスケール14で反射光を受光部で受けることにより、移動テーブル12の移動量に応じた数のパルス信号を得ることができる。また、リニアスケール14の1箇所には原点パターンが設けられていることにより、移動テーブル12のX軸方向上の移動位置の原点信号を得ることもできる。
【0018】
撮像基台8には、移動テーブル12上をY軸方向に跨ぐ形で門型の撮像架台16が架設されている。撮像架台16には図示略のカメラ移動機構にカメラ機構であるエリア型撮像装置18と高速オートフォーカス機構20とがY軸方向に移動可能に設けられている。カメラ移動機構は、制御装置6から指令されたX座標にエリア型撮像装置18と高速オートフォーカス機構20とを一体移動させる。エリア型撮像装置18は、顕微鏡のように対物レンズを有する構成となっており、2次元CCD撮像素子を備える。対物レンズの交換により撮像倍率を変更できるようになっている。
【0019】
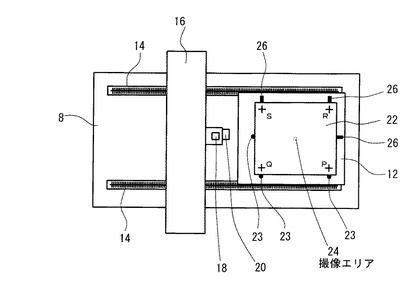
基板22は、例えば、液晶パネル用のガラス基板であり、移動テーブル12上に複数の位置決めピン23と、複数のプッシャ26とにより位置決めされている。この基板22上には、金属膜のエッチングにより、配線パターンと十字型基準マークP、Q、R、Sとが形成されている。
【0020】
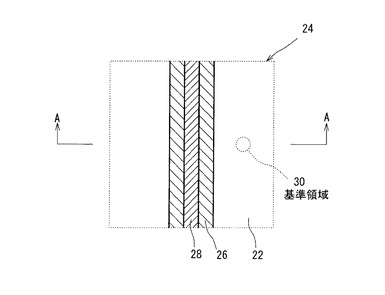
図3は、図2で示す基板22上の点線で囲む撮像エリア24を拡大して示す。この撮像エリア24は、エリア型撮像装置18で撮像され、制御装置6のコンピュータが備えるディスプレイ上に表示される撮像画面になる。
【0021】
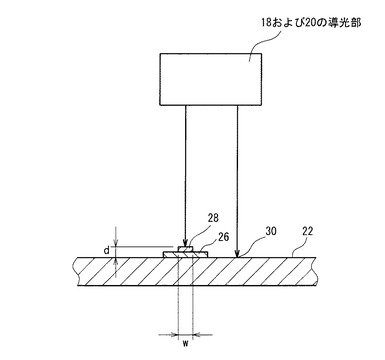
また、図4に、図3で示す撮像エリア24における基板22のA−A線に沿う断面を拡大して示している。なお、図1においてエリア型撮像装置18と高速オートフォーカス機構は横に並べて設置してあるが、共通の導光部を利用し、ビームスプリッタなどにより入力した光を分岐し、それぞれの撮像部に結像させる構造をとっている。図4ならびに以下の図5、図6では、エリア型撮像装置18と高速オートフォーカス機構20共通の導光部が、それぞれ、別々に測定箇所、基準領域を測定する状態を示している。撮像エリア24の基板22上には、例えば、エッチングにより形成された第1配線パターン26と、この第1配線パターン26上にエッチングにより形成された第2配線パターン28とが簡略化して示されている。両配線パターン26,28はY軸方向に延びており、第1、第2配線パターン26,28のトータルした配線厚みはdであり、第2配線パターン28のX軸方向配線幅はwである。また、図3で点線円で示す箇所は高速オートフォーカス機構20の基準領域30である。
【0022】
制御装置6は、キーボードとディスプレイとを備えており、撮像装置4に対して指令を送ったり、撮像装置4のエリア型撮像装置18で撮像した画像を観察したり、撮像装置4を制御するプログラムを入力したりできるようになっている。撮像装置4を制御する寸法計測用のコンピュータプログラムは、制御装置6のコンピュータに当初からインストールさせておいてもよいし、ネットワーク経由で外部からダウンロードすることもできる。
【0023】
制御装置6は、基板22上の任意の点の画像を得るよう移動テーブル12をX軸方向に移動制御するとともに、撮像架台16に対してエリア型撮像装置18をY軸方向に移動制御することにより、第2配線パターン28を撮像する撮像エリア24上にエリア型撮像装置12を設定することができる。
【0024】
そして、制御装置6は、第2配線パターン28の配線幅wを寸法計測する前に高速オートフォーカス機構20を駆動して基準領域30に結像させたり、エリア型撮像装置18を駆動して第2配線パターン28を撮像するよう撮像装置4を制御することができる。
【0025】
以上の結像動作により制御装置6は、高速オートフォーカス機構20が基準領域30に結像する第1結像位置と、エリア型撮像装置18が上下しつつ何枚も撮像してフォーカス位置を決定して第2配線パターン28に結像する第2結像位置との情報を得ると、第1結像位置は記憶手段の第1記憶領域に、第2結像位置は記憶手段の第2記憶領域に、それぞれ、記憶させるとともに、演算手段により、第1、第2結像位置の差を演算し、この演算の値を記憶手段の第3記憶領域に補正値として記憶させる。この場合、制御装置6は、寸法計測用のコンピュータプログラムがダウンロードされたコンピュータを内蔵している。コンピュータは、ハードウェア構成で表現すると、CPUが上記エリア型撮像装置18と高速オートフォーカス機構20それぞれの結像動作を制御する制御手段と、上記演算を行う演算手段とを構成し、RAMが上記記憶を行う記憶手段を構成し、ハードディスク装置が当該コンピュータの基本ソフトや寸法計測用のコンピュータプログラムがダウンロードされた記憶手段を構成する。
【0026】
次に、図5、図6を参照して実施の形態の寸法計測方法を説明する。この寸法計測方法を実行する工程は、制御装置6のコンピュータのコンピュータプログラムに搭載されている。
【0027】
この寸法計測方法は、寸法計測位置教示と、寸法計測とに分かれる。
【0028】
(寸法計測位置教示)
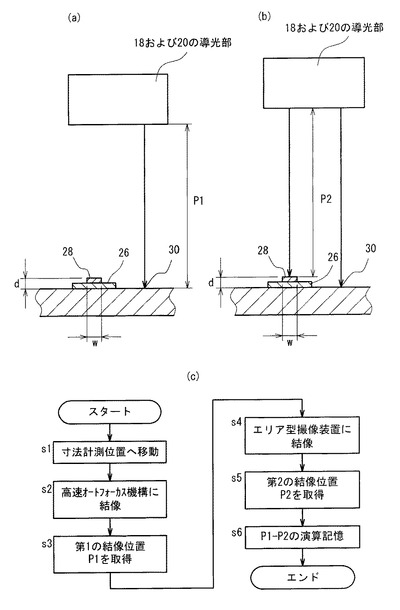
図5(a)(b)(c)を参照して1枚あるいは数枚の基板を使用して、最初の1回だけ実施する場合を説明する。図5(a)はカメラ機構における高速オートフォーカス機構20が第1結像位置P1にあるときの状態を示し、図5(b)はカメラ機構におけるエリア型撮像装置18が第2結像位置P2にあるときの状態を示す。図5(c)は動作説明に用いるフローチャートを示す。
【0029】
スタートしてステップs1では、制御装置6は作業者のコンピュータ操作により寸法計測位置(XY座標系においてX座標位置とY座標位置)が設定入力されると、そのXY座標データに対応して撮像装置4のテーブル12をX座標位置にカメラ機構(エリア型撮像装置18、高速オートフォーカス機構20)をY座標位置に移動させて、そのカメラ機構を寸法計測位置に移動させる。
【0030】
制御装置6は、ステップs1でカメラ機構の寸法計測位置への移動が完了すると、ステップs2で高速オートフォーカス機構20をフォーカス動作させ基準領域30に結像させる。
【0031】
制御装置6は、高速オートフォーカス機構20が基準領域30に結像すると、ステップs3でその第1結像位置P1を取得し、その取得した第1結像位置P1をコンピュータ内の記憶手段の第1記憶領域に記憶させる。
【0032】
次いで、制御装置6はステップs4でエリア型撮像装置18を上下させつつ何枚も撮像し第2配線パターン28上へフォーカスさせる制御動作を開始し、エリア型撮像装置18が第2配線パターン28上に結像すると、ステップs5でその結像位置P2を取得し、その取得した第2結像位置P2をコンピュータ内の記憶手段の第2記憶領域に記憶させる。
【0033】
そして、制御装置6はステップs6で、第1記憶領域に記憶している第1結像位置P1と第2記憶領域に記憶している第2結像位置P2との差をコンピュータ内の演算手段で演算し、この演算した値を補正値ΔPとして第3記憶領域に記憶させて、寸法計測位置教示をエンドにする。
【0034】
(寸法計測時)
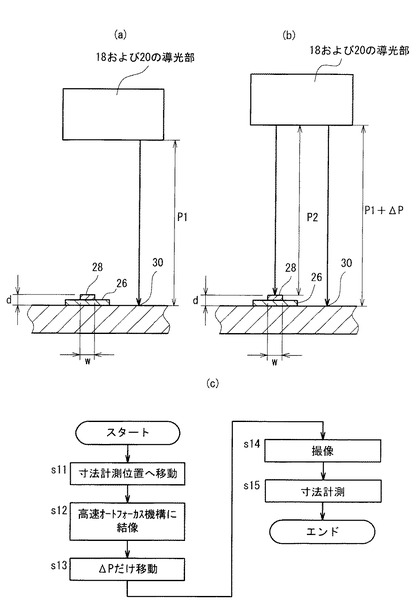
図6を参照して教示が済んで、製品の寸法を測定する場合を説明する。図6(a)は高速オートフォーカス機構20が結像位置P1にあるときの状態を示し、図6(b)はエリア型撮像装置18がΔP補正により結像位置P2にあるときの状態を示す。図6(c)は動作説明に用いるフローチャートを示す。
【0035】
スタートしてステップs11では、制御装置6は作業者のコンピュータ操作により寸法計測位置(XY座標系においてX座標位置とY座標位置)が設定入力されると、自動でそのXY座標データに対応して撮像装置4のテーブル12をX座標位置にエリア型撮像装置18をY座標位置に移動させてエリア型撮像装置18を含むカメラ機構を寸法計測位置に移動させる。
【0036】
制御装置6は、ステップs11でカメラ機構の寸法計測位置への移動が完了すると、次にステップs12で高速オートフォーカス機構20をフォーカス動作させ基準領域30に結像させる。
【0037】
制御装置6は、ステップs12で高速オートフォーカス機構20が基準領域30に結像すると、次いでステップs13で第3記憶領域に記憶されている補正値ΔPに従い高速オートフォーカス機構20のフォーカス位置をΔPだけ移動させる。この移動により高速オートフォーカス機構20と一体移動するエリア型撮像装置18は結像位置P2に移動している。
【0038】
制御装置6は、ステップs13で上記移動が完了すると、ステップs14で制御装置6はエリア型撮像装置18を駆動して撮像エリア内の第2配線パターン28を撮像し、ステップs15でその撮像にかかる第2配線パターン28の画像を制御装置6のコンピュータのディスプレイ上に表示する一方で、コンピュータ内蔵のソフトを用いて第2配線パターン28の配線幅wを寸法計測してエンドする。
【0039】
なお、この実施の形態ではエリア型撮像装置で撮像の高さを変えつつ何枚も撮像し、フォーカスを合わせるという時間がかかる作業が、測定には無くなり、高速で寸法測定を実施することができるようになる。
【図面の簡単な説明】
【0040】
【図1】図1は本発明の実施の形態に係る寸法計測方法の実施に用いる寸法計測装置の概略構成を示す図である。
【図2】図2は図1の寸法計測装置の平面図である。
【図3】図3は図2の基板上の点線矩形で囲む部分を拡大して示す図である。
【図4】図4は図3のA−A線の断面図である。
【図5】図5(a)は寸法計測位置教示時において、カメラ機構における高速オートフォーカス機構が結像位置P1にあるときの状態を示し、図5(b)はカメラ機構におけるエリア型撮像装置が結像位置P2にあるときの状態を示し、図5(c)は動作説明に用いるフローチャートを示す図である。
【図6】図6(a)は寸法計測時において高速オートフォーカス機構が結像位置P1にあるときの状態を示し、図6(b)はエリア型撮像装置がΔP補正により結像位置P2にあるときの状態を示し、図6(c)は動作説明に用いるフローチャートを示す図である。
【符号の説明】
【0041】
2 寸法計測装置
4 撮像装置
6 制御装置
8 撮像基台
10 ガイドレール
12 移動テーブル
14 リニアスケール
16 撮像架台
18 エリア型撮像装置
20 高速オートフォーカス機構
22 基板
24 撮像エリア
26 第1配線パターン
28 第2配線パターン
【技術分野】
【0001】
本発明は、サブミクロンオーダーに微細加工される半導体集積回路やそれに付随するエッチング製品等の測定対象をエリア型撮像装置で撮像し、その撮像画像を処理して当該測定対象の寸法を計測する寸法計測方法およびこの方法の実施に用いる撮像装置、制御装置ならびにこれらの組み合わせに係る寸法計測装置に関する。
【背景技術】
【0002】
エリア型撮像装置はCCDを二次元配列してなる撮像面を備え、撮像エリア内の測定対象をレンズ系でその撮像面に結像するようになっている。このようなエリア型撮像装置で測定対象の寸法計測を正確に行うには測定対象を撮像面に合焦(フォーカス)させることが必要である。このようなフォーカス動作を自動的に行うオートフォーカス(自動合焦制御)機構や(特許文献1、2参照)、さらには自動かつ高速で行う高速オートフォーカス機構も提案されている(特許文献3参照)。
【0003】
ところで、エリア型撮像装置を用いて測定対象の寸法計測を行うに際してエリア型撮像装置の撮像面に測定対象像をオートフォーカスさせる方式として、測定対象の寸法測定面に垂直な方向にエリア型撮像装置を2箇所以上に移動しそれぞれの移動位置で測定対象を撮像し、これら撮像に係る画像の処理によりエリア型撮像装置が測定対象に対してオートフォーカスする位置を演算し、その演算に従いエリア型撮像装置を結像位置に移動させる方式がある。しかしながら、この方式では、撮像、移動、演算を繰り返し実施する必要があり、エリア型撮像装置をオートフォーカスさせるまでの処理に時間がかかっていた。
【特許文献1】特開平7−105547
【特許文献2】特開平5−122582
【特許文献3】特表2005−525550
【発明の開示】
【発明が解決しようとする課題】
【0004】
したがって、本発明により解決すべき課題は、エリア型撮像装置のオートフォーカスを高速に行うことができるようにすることである。
【課題を解決するための手段】
【0005】
(1)本発明による寸法計測方法は、撮像エリア内の測定対象を撮像するエリア型撮像装置と、撮像エリアのオートフォーカス動作を高速で行う高速オートフォーカス機構とを一体として使用する、測定対象の寸法を計測する方法であって、寸法計測位置教示時に、測定対象の近傍に設定した基準領域が高速オートフォーカス機構に結像する、高速オートフォーカス機構の位置を求めるステップと、上記ステップで得た位置(第1結像位置)を第1記憶領域に記憶するステップと、撮像エリア内の測定対象がエリア型撮像装置に結像する、エリア型撮像装置の位置を求めるステップと、このステップで得た位置(第2結像位置)を第2記憶領域に記憶するステップと、第1、第2記憶領域にそれぞれ記憶している第1、第2結像位置の差を演算するステップと、この演算した値を補正値として第3記憶領域に記憶するステップと、を実施し、寸法計測時に、測定対象の近傍に設定した基準領域が高速オートフォーカス機構に結像する、高速オートフォーカス機構の位置を求めるステップと、上記ステップで得た第1結像位置から第3記憶領域に記憶されている上記補正値だけエリア型撮像装置の位置を補正するステップと、を実施する、ことを特徴とするものである。
【0006】
本発明によると、測定対象の近傍に設定した基準領域が高速オートフォーカス機構に結像する、高速オートフォーカス機構の位置と、撮像エリア内の測定対象がエリア型撮像装置に結像する、エリア型撮像装置の位置とが一致していない場合でも、寸法計測時には、撮像エリア内に設定した基準領域が高速オートフォーカス機構に結像する、高速オートフォーカス機構の位置を求めるステップと、上記ステップで得た第1結像位置から第3記憶領域に記憶されている上記補正値だけエリア型撮像装置の位置を補正するステップと、を実施するのみで、エリア型撮像装置を測定対象に高速でオートフォーカスさせられる。
【0007】
(2)測定対象が、基板上にエッチングにより形成されたパターンであることが好ましい。
【0008】
(3)上記基準領域の形状が、点状、線状、面状のいずれかの形状であることが好ましい。基準領域に凹凸がある場合では、線状や面状とし、高速オートフォーカス機構からのオートフォーカス信号の平均値からその凹凸の影響を軽減することができる。
【0009】
(4)寸法計測位置教示および寸法計測時に、上記基板を、直交二次元XY座標系内を移動可能な移動テーブル上に配置するステップと、上記配置した基板上における測定対象のXY座標系内での位置を検出するステップと、上記検出からエリア型撮像装置をXY座標系内を移動させて測定対象に対する撮像位置を設定するステップと、をそれぞれ実施してエリア型撮像装置および高速オートフォーカス機構を撮像エリアに移動することが好ましい。
【0010】
基板上の測定対象の位置情報を正確に制御装置等のコンピュータに伝送することができ、寸法計測をより高速かつ正確に実施することができるようになる。
【0011】
(5)本発明による撮像装置は、撮像基台上を直交二次元XY座標系内のX軸方向に移動可能とされた移動テーブルと、上記移動テーブル上に位置決めされた基板上をY軸方向に移動可能とされたエリア型撮像装置と、上記エリア型撮像装置と一体に移動可能とされて基板上の基準領域にオートフォーカス可能に配置された高速オートフォーカス機構と、を備えることを特徴とするものである。
【0012】
(6)本発明による制御装置は、上記(5)に記載の撮像装置を制御するコンピュータ内蔵制御装置であって、当該コンピュータは、上記(1)ないし(4)のいずれかに記載の寸法計測方法を実施するよう上記撮像装置内のエリア型撮像装置と高速オートフォーカス機構とを制御するためのコンピュータプログラムを搭載している、ことを特徴とするものである。
【0013】
(7)本発明による寸法計測装置は、上記(5)に記載の撮像装置と、上記(6)に記載の制御装置とを組み合わせてなることを特徴とするものである。
【発明の効果】
【0014】
本発明によれば、高速オートフォーカス機構を用いてエリア型撮像装置を測定対象に高速でかつ正確にオートフォーカスさせることができる。
【発明を実施するための最良の形態】
【0015】
以下、添付した図面を参照して本発明の実施の形態に係る寸法計測方法を詳細に説明する。
【0016】
図1は、同寸法計測方法を実施するために用いる寸法計測装置と該寸法計測装置を制御する制御装置との概略構成を示す斜視図、図2は、同寸法計測装置の平面図である。図1はX軸方向、Y軸方向、Z軸方向が示されている。これら各軸は互いに直交している。寸法計測装置2は、測定対象を撮像するための撮像装置4と、撮像装置4を制御するコンピュータ内蔵の制御装置6とから構成されている。撮像装置4と制御装置6は、相互に情報伝送可能に接続されている。制御装置6は撮像装置4が撮像した画像から寸法を演算する機能も備える。
【0017】
撮像装置4は、X軸方向長手でY軸方向一定幅の平面視矩形形状の撮像基台8を備える。撮像基台8上にはX軸方向に互いに平行に延びる一対のガイドレール10が設けられている。この一対のガイドレール10に矩形平板形状の移動テーブル12がX軸方向に移動可能になっている。移動テーブル12には、図示略のエンコーダが一体的に設置されている。ガイドレール10に沿って設けられたリニアスケール14とエンコーダとによって、移動テーブル12のX軸方向の移動量を測定することができる。図示略のエンコーダには、投光部と受光部が備えられ、投光部から出射されてリニアスケール14で反射光を受光部で受けることにより、移動テーブル12の移動量に応じた数のパルス信号を得ることができる。また、リニアスケール14の1箇所には原点パターンが設けられていることにより、移動テーブル12のX軸方向上の移動位置の原点信号を得ることもできる。
【0018】
撮像基台8には、移動テーブル12上をY軸方向に跨ぐ形で門型の撮像架台16が架設されている。撮像架台16には図示略のカメラ移動機構にカメラ機構であるエリア型撮像装置18と高速オートフォーカス機構20とがY軸方向に移動可能に設けられている。カメラ移動機構は、制御装置6から指令されたX座標にエリア型撮像装置18と高速オートフォーカス機構20とを一体移動させる。エリア型撮像装置18は、顕微鏡のように対物レンズを有する構成となっており、2次元CCD撮像素子を備える。対物レンズの交換により撮像倍率を変更できるようになっている。
【0019】
基板22は、例えば、液晶パネル用のガラス基板であり、移動テーブル12上に複数の位置決めピン23と、複数のプッシャ26とにより位置決めされている。この基板22上には、金属膜のエッチングにより、配線パターンと十字型基準マークP、Q、R、Sとが形成されている。
【0020】
図3は、図2で示す基板22上の点線で囲む撮像エリア24を拡大して示す。この撮像エリア24は、エリア型撮像装置18で撮像され、制御装置6のコンピュータが備えるディスプレイ上に表示される撮像画面になる。
【0021】
また、図4に、図3で示す撮像エリア24における基板22のA−A線に沿う断面を拡大して示している。なお、図1においてエリア型撮像装置18と高速オートフォーカス機構は横に並べて設置してあるが、共通の導光部を利用し、ビームスプリッタなどにより入力した光を分岐し、それぞれの撮像部に結像させる構造をとっている。図4ならびに以下の図5、図6では、エリア型撮像装置18と高速オートフォーカス機構20共通の導光部が、それぞれ、別々に測定箇所、基準領域を測定する状態を示している。撮像エリア24の基板22上には、例えば、エッチングにより形成された第1配線パターン26と、この第1配線パターン26上にエッチングにより形成された第2配線パターン28とが簡略化して示されている。両配線パターン26,28はY軸方向に延びており、第1、第2配線パターン26,28のトータルした配線厚みはdであり、第2配線パターン28のX軸方向配線幅はwである。また、図3で点線円で示す箇所は高速オートフォーカス機構20の基準領域30である。
【0022】
制御装置6は、キーボードとディスプレイとを備えており、撮像装置4に対して指令を送ったり、撮像装置4のエリア型撮像装置18で撮像した画像を観察したり、撮像装置4を制御するプログラムを入力したりできるようになっている。撮像装置4を制御する寸法計測用のコンピュータプログラムは、制御装置6のコンピュータに当初からインストールさせておいてもよいし、ネットワーク経由で外部からダウンロードすることもできる。
【0023】
制御装置6は、基板22上の任意の点の画像を得るよう移動テーブル12をX軸方向に移動制御するとともに、撮像架台16に対してエリア型撮像装置18をY軸方向に移動制御することにより、第2配線パターン28を撮像する撮像エリア24上にエリア型撮像装置12を設定することができる。
【0024】
そして、制御装置6は、第2配線パターン28の配線幅wを寸法計測する前に高速オートフォーカス機構20を駆動して基準領域30に結像させたり、エリア型撮像装置18を駆動して第2配線パターン28を撮像するよう撮像装置4を制御することができる。
【0025】
以上の結像動作により制御装置6は、高速オートフォーカス機構20が基準領域30に結像する第1結像位置と、エリア型撮像装置18が上下しつつ何枚も撮像してフォーカス位置を決定して第2配線パターン28に結像する第2結像位置との情報を得ると、第1結像位置は記憶手段の第1記憶領域に、第2結像位置は記憶手段の第2記憶領域に、それぞれ、記憶させるとともに、演算手段により、第1、第2結像位置の差を演算し、この演算の値を記憶手段の第3記憶領域に補正値として記憶させる。この場合、制御装置6は、寸法計測用のコンピュータプログラムがダウンロードされたコンピュータを内蔵している。コンピュータは、ハードウェア構成で表現すると、CPUが上記エリア型撮像装置18と高速オートフォーカス機構20それぞれの結像動作を制御する制御手段と、上記演算を行う演算手段とを構成し、RAMが上記記憶を行う記憶手段を構成し、ハードディスク装置が当該コンピュータの基本ソフトや寸法計測用のコンピュータプログラムがダウンロードされた記憶手段を構成する。
【0026】
次に、図5、図6を参照して実施の形態の寸法計測方法を説明する。この寸法計測方法を実行する工程は、制御装置6のコンピュータのコンピュータプログラムに搭載されている。
【0027】
この寸法計測方法は、寸法計測位置教示と、寸法計測とに分かれる。
【0028】
(寸法計測位置教示)
図5(a)(b)(c)を参照して1枚あるいは数枚の基板を使用して、最初の1回だけ実施する場合を説明する。図5(a)はカメラ機構における高速オートフォーカス機構20が第1結像位置P1にあるときの状態を示し、図5(b)はカメラ機構におけるエリア型撮像装置18が第2結像位置P2にあるときの状態を示す。図5(c)は動作説明に用いるフローチャートを示す。
【0029】
スタートしてステップs1では、制御装置6は作業者のコンピュータ操作により寸法計測位置(XY座標系においてX座標位置とY座標位置)が設定入力されると、そのXY座標データに対応して撮像装置4のテーブル12をX座標位置にカメラ機構(エリア型撮像装置18、高速オートフォーカス機構20)をY座標位置に移動させて、そのカメラ機構を寸法計測位置に移動させる。
【0030】
制御装置6は、ステップs1でカメラ機構の寸法計測位置への移動が完了すると、ステップs2で高速オートフォーカス機構20をフォーカス動作させ基準領域30に結像させる。
【0031】
制御装置6は、高速オートフォーカス機構20が基準領域30に結像すると、ステップs3でその第1結像位置P1を取得し、その取得した第1結像位置P1をコンピュータ内の記憶手段の第1記憶領域に記憶させる。
【0032】
次いで、制御装置6はステップs4でエリア型撮像装置18を上下させつつ何枚も撮像し第2配線パターン28上へフォーカスさせる制御動作を開始し、エリア型撮像装置18が第2配線パターン28上に結像すると、ステップs5でその結像位置P2を取得し、その取得した第2結像位置P2をコンピュータ内の記憶手段の第2記憶領域に記憶させる。
【0033】
そして、制御装置6はステップs6で、第1記憶領域に記憶している第1結像位置P1と第2記憶領域に記憶している第2結像位置P2との差をコンピュータ内の演算手段で演算し、この演算した値を補正値ΔPとして第3記憶領域に記憶させて、寸法計測位置教示をエンドにする。
【0034】
(寸法計測時)
図6を参照して教示が済んで、製品の寸法を測定する場合を説明する。図6(a)は高速オートフォーカス機構20が結像位置P1にあるときの状態を示し、図6(b)はエリア型撮像装置18がΔP補正により結像位置P2にあるときの状態を示す。図6(c)は動作説明に用いるフローチャートを示す。
【0035】
スタートしてステップs11では、制御装置6は作業者のコンピュータ操作により寸法計測位置(XY座標系においてX座標位置とY座標位置)が設定入力されると、自動でそのXY座標データに対応して撮像装置4のテーブル12をX座標位置にエリア型撮像装置18をY座標位置に移動させてエリア型撮像装置18を含むカメラ機構を寸法計測位置に移動させる。
【0036】
制御装置6は、ステップs11でカメラ機構の寸法計測位置への移動が完了すると、次にステップs12で高速オートフォーカス機構20をフォーカス動作させ基準領域30に結像させる。
【0037】
制御装置6は、ステップs12で高速オートフォーカス機構20が基準領域30に結像すると、次いでステップs13で第3記憶領域に記憶されている補正値ΔPに従い高速オートフォーカス機構20のフォーカス位置をΔPだけ移動させる。この移動により高速オートフォーカス機構20と一体移動するエリア型撮像装置18は結像位置P2に移動している。
【0038】
制御装置6は、ステップs13で上記移動が完了すると、ステップs14で制御装置6はエリア型撮像装置18を駆動して撮像エリア内の第2配線パターン28を撮像し、ステップs15でその撮像にかかる第2配線パターン28の画像を制御装置6のコンピュータのディスプレイ上に表示する一方で、コンピュータ内蔵のソフトを用いて第2配線パターン28の配線幅wを寸法計測してエンドする。
【0039】
なお、この実施の形態ではエリア型撮像装置で撮像の高さを変えつつ何枚も撮像し、フォーカスを合わせるという時間がかかる作業が、測定には無くなり、高速で寸法測定を実施することができるようになる。
【図面の簡単な説明】
【0040】
【図1】図1は本発明の実施の形態に係る寸法計測方法の実施に用いる寸法計測装置の概略構成を示す図である。
【図2】図2は図1の寸法計測装置の平面図である。
【図3】図3は図2の基板上の点線矩形で囲む部分を拡大して示す図である。
【図4】図4は図3のA−A線の断面図である。
【図5】図5(a)は寸法計測位置教示時において、カメラ機構における高速オートフォーカス機構が結像位置P1にあるときの状態を示し、図5(b)はカメラ機構におけるエリア型撮像装置が結像位置P2にあるときの状態を示し、図5(c)は動作説明に用いるフローチャートを示す図である。
【図6】図6(a)は寸法計測時において高速オートフォーカス機構が結像位置P1にあるときの状態を示し、図6(b)はエリア型撮像装置がΔP補正により結像位置P2にあるときの状態を示し、図6(c)は動作説明に用いるフローチャートを示す図である。
【符号の説明】
【0041】
2 寸法計測装置
4 撮像装置
6 制御装置
8 撮像基台
10 ガイドレール
12 移動テーブル
14 リニアスケール
16 撮像架台
18 エリア型撮像装置
20 高速オートフォーカス機構
22 基板
24 撮像エリア
26 第1配線パターン
28 第2配線パターン
【特許請求の範囲】
【請求項1】
撮像エリア内の測定対象を撮像するエリア型撮像装置と、撮像エリアのオートフォーカス動作を高速で行う高速オートフォーカス機構とを一体として使用する、測定対象の寸法を計測する方法であって、
寸法計測位置教示時に、
測定対象の近傍に設定した基準領域が高速オートフォーカス機構に結像する、高速オートフォーカス機構の位置を求めるステップと、
上記ステップで得た位置(第1結像位置)を第1記憶領域に記憶するステップと、
撮像エリア内の測定対象がエリア型撮像装置に結像する、エリア型撮像装置の位置を求めるステップと、
このステップで得た位置(第2結像位置)を第2記憶領域に記憶するステップと、
第1、第2記憶領域にそれぞれ記憶している第1、第2結像位置の差を演算するステップと、
この演算した値を補正値として第3記憶領域に記憶するステップと、を実施し、
寸法計測時に、
測定対象の近傍に設定した基準領域が高速オートフォーカス機構に結像する、高速オートフォーカス機構の位置を求めるステップと、
上記ステップで得た第1結像位置から第3記憶領域に記憶されている上記補正値だけエリア型撮像装置の位置を補正するステップと、を実施する、
ことを特徴とする寸法計測方法。
【請求項2】
測定対象が、基板上にエッチングにより形成されたパターンである、ことを特徴とする請求項1に記載の寸法計測方法。
【請求項3】
前記基準領域の形状が、点状、線状、面状のいずれかの形状である、ことを特徴とする請求項1ないし2に記載の寸法計測方法。
【請求項4】
寸法計測位置教示および寸法計測時に、
上記基板を、直交二次元XY座標系内を移動可能な移動テーブル上に配置するステップと、
上記配置した基板上における測定対象のXY座標系内での位置を検出するステップと、
上記検出からエリア型撮像装置をXY座標系内を移動させて測定対象に対する撮像位置を設定するステップと、
をそれぞれ実施してエリア型撮像装置および高速オートフォーカス機構を撮像エリアに移動する、ことを特徴とする請求項2または3に記載の寸法計測方法。
【請求項5】
撮像基台上を直交二次元XY座標系内のX軸方向に移動可能とされた移動テーブルと、
上記移動テーブル上に位置決めされた基板上をY軸方向に移動可能とされたエリア型撮像装置と、
上記エリア型撮像装置と一体に移動可能とされて基板上の基準領域にオートフォーカス可能に配置された高速オートフォーカス機構と、
を備えたことを特徴とする撮像装置。
【請求項6】
請求項5に記載の撮像装置を制御するコンピュータ内蔵制御装置であって、
当該コンピュータは、請求項1ないし4のいずれかに記載の寸法計測方法を実施するよう上記撮像装置内のエリア型撮像装置と高速オートフォーカス機構とを制御するためのコンピュータプログラムを搭載している、
ことを特徴とする制御装置。
【請求項7】
請求項5に記載の撮像装置と、請求項6に記載の制御装置とを組み合わせてなる、ことを特徴とする寸法計測装置。
【請求項1】
撮像エリア内の測定対象を撮像するエリア型撮像装置と、撮像エリアのオートフォーカス動作を高速で行う高速オートフォーカス機構とを一体として使用する、測定対象の寸法を計測する方法であって、
寸法計測位置教示時に、
測定対象の近傍に設定した基準領域が高速オートフォーカス機構に結像する、高速オートフォーカス機構の位置を求めるステップと、
上記ステップで得た位置(第1結像位置)を第1記憶領域に記憶するステップと、
撮像エリア内の測定対象がエリア型撮像装置に結像する、エリア型撮像装置の位置を求めるステップと、
このステップで得た位置(第2結像位置)を第2記憶領域に記憶するステップと、
第1、第2記憶領域にそれぞれ記憶している第1、第2結像位置の差を演算するステップと、
この演算した値を補正値として第3記憶領域に記憶するステップと、を実施し、
寸法計測時に、
測定対象の近傍に設定した基準領域が高速オートフォーカス機構に結像する、高速オートフォーカス機構の位置を求めるステップと、
上記ステップで得た第1結像位置から第3記憶領域に記憶されている上記補正値だけエリア型撮像装置の位置を補正するステップと、を実施する、
ことを特徴とする寸法計測方法。
【請求項2】
測定対象が、基板上にエッチングにより形成されたパターンである、ことを特徴とする請求項1に記載の寸法計測方法。
【請求項3】
前記基準領域の形状が、点状、線状、面状のいずれかの形状である、ことを特徴とする請求項1ないし2に記載の寸法計測方法。
【請求項4】
寸法計測位置教示および寸法計測時に、
上記基板を、直交二次元XY座標系内を移動可能な移動テーブル上に配置するステップと、
上記配置した基板上における測定対象のXY座標系内での位置を検出するステップと、
上記検出からエリア型撮像装置をXY座標系内を移動させて測定対象に対する撮像位置を設定するステップと、
をそれぞれ実施してエリア型撮像装置および高速オートフォーカス機構を撮像エリアに移動する、ことを特徴とする請求項2または3に記載の寸法計測方法。
【請求項5】
撮像基台上を直交二次元XY座標系内のX軸方向に移動可能とされた移動テーブルと、
上記移動テーブル上に位置決めされた基板上をY軸方向に移動可能とされたエリア型撮像装置と、
上記エリア型撮像装置と一体に移動可能とされて基板上の基準領域にオートフォーカス可能に配置された高速オートフォーカス機構と、
を備えたことを特徴とする撮像装置。
【請求項6】
請求項5に記載の撮像装置を制御するコンピュータ内蔵制御装置であって、
当該コンピュータは、請求項1ないし4のいずれかに記載の寸法計測方法を実施するよう上記撮像装置内のエリア型撮像装置と高速オートフォーカス機構とを制御するためのコンピュータプログラムを搭載している、
ことを特徴とする制御装置。
【請求項7】
請求項5に記載の撮像装置と、請求項6に記載の制御装置とを組み合わせてなる、ことを特徴とする寸法計測装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2007−218846(P2007−218846A)
【公開日】平成19年8月30日(2007.8.30)
【国際特許分類】
【出願番号】特願2006−42424(P2006−42424)
【出願日】平成18年2月20日(2006.2.20)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成19年8月30日(2007.8.30)
【国際特許分類】
【出願日】平成18年2月20日(2006.2.20)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]