
対地作業部付き作業車両
【課題】手動昇降用のポジションレバーおよび自動昇降用の操作パネルに起因する対地作業部の予期せぬ昇降動作を回避して安全な昇降制御を可能とする対地作業部付き作業車両を提供する。
【解決手段】対地作業部付き作業車両は、手動昇降用のポジションレバー(21a)と自動昇降用の操作パネル(22)のそれぞれの指示に沿って対地作業部(41)の保持高さを昇降制御する作業機制御部(C1)と、車両起動当初における対地作業部(41)の昇降制御を規制するセフティ機構と、このセフティ機構による規制をポジションレバー(21a)の所定の予備操作によって解除する解除手段とを備えて構成され、上記作業機制御部(C1)は、車両起動時に操作パネル(22)の信号の異常があった場合に、ポジションレバー(21a)の指示に沿って対地作業部(41)の保持高さを昇降制御する制御処理を備えたものである。
【解決手段】対地作業部付き作業車両は、手動昇降用のポジションレバー(21a)と自動昇降用の操作パネル(22)のそれぞれの指示に沿って対地作業部(41)の保持高さを昇降制御する作業機制御部(C1)と、車両起動当初における対地作業部(41)の昇降制御を規制するセフティ機構と、このセフティ機構による規制をポジションレバー(21a)の所定の予備操作によって解除する解除手段とを備えて構成され、上記作業機制御部(C1)は、車両起動時に操作パネル(22)の信号の異常があった場合に、ポジションレバー(21a)の指示に沿って対地作業部(41)の保持高さを昇降制御する制御処理を備えたものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、対地作業部の保持高さを手動または設定による指示高さに昇降制御可能に構成した対地作業部付き作業車両に関するものである。
【背景技術】
【0002】
特許文献1に示すように、昇降動作可能に装備されている対地作業部の保持高さを手動昇降用のポジションレバーと自動昇降設定用の操作パネルの指示に沿って昇降制御可能に構成することによって作業部の多様な昇降制御を確保した対地作業部付き作業車両が知られている。
【0003】
手動昇降機能については、ポジションレバーの当初の指示位置が作業部の高さと不一致のまま起動した場合に、作業部が予期せずして昇降動作するという問題があり、その解決のために、起動当初における作業部の昇降動作を規制するセフティ機構を設けるとともに、ポジションレバーの1ストロークに及ぶ予備操作によってセフティ機構による昇降規制を解除するように構成することにより、作業部の予期せぬ昇降動作に伴う不測の事態を招くことなく、作業部の手動昇降を安全に開始することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平3−160905号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、操作パネルによる自動昇降機能は、操作パネルの異常があると、ポジションレバーによるセフティ機構の解除操作以降の時点において操作パネルの指示が回復した場合に、その時点で指示に沿って作業部が予期せずに昇降動作することがあり、自動昇降機能について問題となっていた。この問題は、各種の搭載機器について多様な制御設定を可能とするべく、操作パネルと作業機制御部との間を通信手段によって接続した多機能型の作業車両において特に解決が待たれているものであった。
【0006】
本発明の目的は、手動制御用のポジションレバーと自動昇降用の操作パネルを備えて対地作業部を昇降可能に設けた対地作業部付き作業車両において、手動昇降制御についての起動時の安全確保とともに、操作パネルの異常に伴う作業部の予期せぬ昇降動作を回避して安全に昇降作業を継続することができる対地作業部付き作業車両を提供することにある。
【課題を解決するための手段】
【0007】
請求項1に係る発明は、手動操作に応じた高さ位置を指示するポジションレバーと設定高さ位置を指示する操作パネルのそれぞれの指示に沿って対地作業部の保持高さを昇降制御する作業機制御部と、車両起動当初における対地作業部の昇降制御を規制するセフティ機構と、このセフティ機構による規制をポジションレバーの所定の予備操作によって解除する解除手段とを備える対地作業部付き作業車両において、上記作業機制御部は、車両起動時に操作パネルの信号の異常があった場合に、ポジションレバーの指示に沿って対地作業部の保持高さを昇降制御する制御処理を備えたことを特徴とする。
【0008】
上記構成の作業車両は、セフティ機構とその解除手段とを備えることにより、ポジションレバーに起因する起動当初の対地作業部の昇降動作を規制した上で手動昇降制御が開始され、操作パネルからの信号の異常があった場合には手動制御に限定することにより、操作パネルからの信号回復に伴う予期せぬ昇降動作を抑えつつ、手動昇降の継続が確保される。
【0009】
請求項2に係る発明は、請求項1の構成において、前記作業機制御部は、解除手段によって昇降制御が開始された以降において操作パネルによる設定高さ位置の指示が回復された場合に、セフティ機構によって対地作業部の昇降制御を規制する制御処理を備えたことを特徴とする。
上記構成の作業車両は、操作パネルからの信号の回復に伴う対地作業部の予期せぬ昇降動作がセフティ機構によって規制され、ここで解除手段を介して昇降制御規制を解除することにより、対地作業部が設定位置に自動昇降される。
【発明の効果】
【0010】
請求項1の発明の対地作業部付き作業車両は、セフティ機構とその解除手段とを備えることにより、ポジションレバーに起因する起動当初の対地作業部の昇降動作を規制して手動昇降制御の開始が可能となり、操作パネルからの信号の異常があった場合には手動制御に限定することにより、操作パネルからの信号回復に伴う予期せぬ昇降動作を抑えつつ、手動昇降の継続が確保されることから、手動昇降と自動昇降による対地作業部の多様な昇降制御を確保した上で、起動当初におけるポジションレバーに起因する予期せぬ昇降動作を回避して安全に対地作業部の昇降制御を開始することができるとともに、昇降制御の開始以降においても、操作パネルの異常に起因する予期せぬ昇降動作を招くことなく安全に作業を継続することができる。
【0011】
請求項2に係る発明の対地作業部付き作業車両は、請求項1の効果に加え、上記構成の作業車両は、操作パネルからの信号の回復時にセフティ機構により対地作業部の昇降動作が新たに規制され、ここで解除手段を介して昇降制御規制を解除することにより、対地作業部が設定位置に自動昇降されることから、操作パネルからの信号の回復に際して、予期せぬ昇降動作を招くことなく、操作パネルに基づく自動昇降に安全に移行することができる。
【図面の簡単な説明】
【0012】
【図1】農用トラクタの機体側面図
【図2】キャビン内2の斜視図
【図3】操作装置の拡大斜視図
【図4】基段部の取付け面見取図
【図5】中段部のパネル面見取図
【図6】スイッチボックスの側面図
【図7】作業部昇降制御のシステム構成図
【図8】車両起動時の制御処理のフローチャート
【図9】通信異常が回復した場合の制御処理のフローチャート
【図10】表示制御の制御処理のフローチャート
【図11】車両起動の後における通信異常対応の制御処理のフローチャート
【図12】設定変更対応の制御処理のフローチャート
【図13】設定変更対応の別の制御処理のフローチャート
【図14】機体の水平制御の例による制御処理のフローチャート
【図15】動作モードを記憶する制御処理のフローチャート
【図16】コモンレールエンジンについての制御構成図
【図17】2つのトルクマップA,Bの例示
【図18】通常(N)と省エネ(E)の変速タイミングを表す変速線図
【図19】規制勾配によるアクセル指示の制御例
【図20】路上走行時の制御処理のフローチャート
【図21】エンジン回転数による制御処理のフローチャート
【図22】過大負荷対応の別の制御処理のフローチャート
【発明を実施するための形態】
【0013】
上記技術思想に基づいて具体的に構成された実施の形態について以下に図面を参照しつつ説明する。
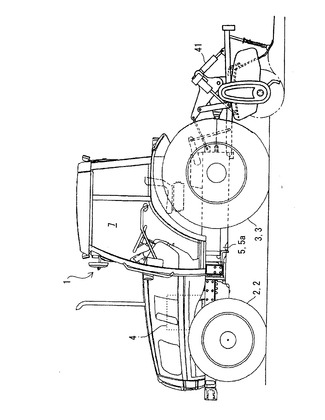
本発明の作業車両の1例としての農用トラクタ1は、機体側面図を図1に示すように、左右前輪2、2と左右後輪3、3とを備えた機体の前部を覆うボンネット内にエンジン4を搭載し、このエンジン4の回転動力をミッションケース5内の変速伝動部5aに伝達し、この変速伝動部5aで適宜減速された動力を左右前輪2、2と左右後輪3、3とに伝達するとともに、3Pリンクに連結した作業機41にPTO軸を介して後部出力するように構成されている。
【0014】
(キャビン)
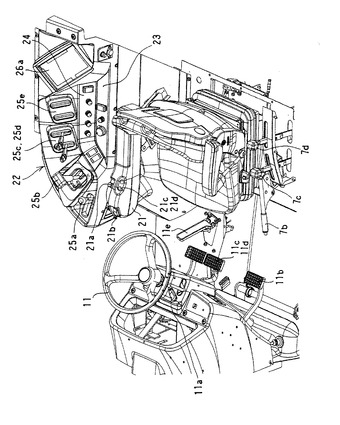
キャビン内には、図2の斜視図に示すように、オペレータ操作のために、ミッションケース5の上部位置に運転座席7を配置し、この運転座席7の片側のアームレスト21およびその外側方に後述の操作装置22を設けるほか、運転座席7の他側方に、駐車ブレーキ7b、PTOチェンジレバー7c、7d等を配置して操作部を構成し、また、ステアリングハンドル11の近傍に前後進切換レバー11a、基部にクラッチペダル11b、左右ブレーキペダル11c、11d、アクセルペダル11e等の走行操作具が配置される。
【0015】
アームレスト21には、作業機昇降レバー21a、作業機昇降スイッチ21b、走行変速スイッチ21c、21d等の作業走行用の操作具が配置される。
作業機昇降レバー21aは、後側が「上昇」、前側が「下降」で、機体旋回等の際に作業機を昇降する。
作業機昇降スイッチ21bは、シーソースイッチであり、後側のワンプッシュ操作で上げ調整ダイヤルで調整した最大位置まで上昇し、前側のワンプッシュ操作で作業機昇降レバー21aの位置まで下降する。
2つ一組の走行変速スイッチ21c、21dは、それぞれを1回押すごとにシフトアップ、シフトダウンし、低速8段、中速8段、高速8段、路上走行速4段の範囲で速度調整する。
【0016】
また、第1のPTOチェンジレバー7cは前から「2速」−「N(中立)」−「1速」のポジションによりPTO回転を変更する。第2のPTOチェンジレバー7dは、正逆切換(前側が正転、後側が逆転)用であり、そのバリエーションとして、エコノミーPTO切換レバー(前側が「切」、後側が「入」)の場合は、「入り」にするとPTOの回転が所定回転ダウンし、グランドPTO切換レバー(前側が「切」、後側が「入」)の場合は、「入り」にするとPTOの回転が車速にシンクロする。
【0017】
(操作パネル)
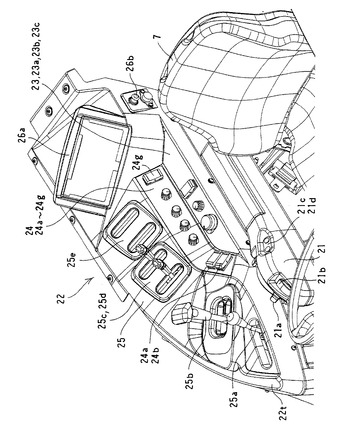
操作装置22は、各種機器の操作具とそれぞれの制御設定を行うための操作パネルとからなり、拡大斜視図を図3に示すように、操作性を向上するために作業機や走行系およびエンジン回転数等の操作部を運転座席7の片側方(図例は右側方)に集中配置したものであり、トラクタを構成する走行系および作業系の機器を制御操作するための操作具23a〜25eと、これら操作具23a〜25eを支持して運転座席7の片側方に集中配置する操作パネル22tとから構成する。
【0018】
操作パネル22tは、運転座席7と隣接する平坦状の基段部23と、その奥側から急傾斜で起立する中段部24と、その上端から奥高に緩く傾斜する上段部25とからなり、それぞれに操作具を配置する。すなわち、一体のレバーガイドで上面をカバーして構成し、運転座席7に近いところは平面部23を設け、この平面部23より奥側の座席から遠いところに、やや傾斜して平面部23よりは高い位置の傾斜部25を設け、この傾斜部25と前記平面部23を前記傾斜部より傾斜角度のきつい傾斜面24でつなぐように配置面を構成し、全ての面に各々、操作スイッチやレバー等の操作具を配置する。
【0019】
特に、運転座席7から近い基段部23と中段部24は、スイッチ等の電気系の操作具を配置し、比較的離れている上段部25はストローク動作するレバー類による操作具を配置することにより、操作具に応じた操作性を確保することができる。
【0020】
(基段部)
上記操作装置22の各操作具の具体的な説明は以下のとおりである。
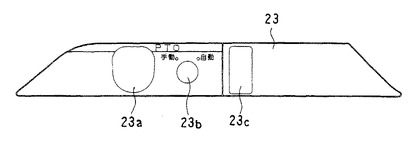
基段部23には、取付け面見取図を図4に示すように、PTO入り切りスイッチ23a、PTO手動自動スイッチ23b、デフロックスイッチ23c等のトランスミッションの動力伝達と遮断を直接実施する操作スイッチを配置する。これらスイッチは、操作が比較的複雑なモード設定スイッチと異なり、操作が単純であることから、オペレータが腕を曲げた状態の比較的窮屈な姿勢でも容易に操作することができる。
【0021】
PTO入り切りスイッチ23a(左で「切り」、右で「入り」)は、押して右に回すと「入り」、「入り」状態で押すと自動で「切り」に戻る。
PTO手動自動スイッチ23b(左で「手動」、右で「自動」)は主に水田作業で利用し、「手動」の時はPTO入りでチェンジが入っていると常時回転し、「自動」の時はクラッチを踏んだり、3Pリンクを上げると回転が止まる。
デフロックスイッチ23cは、運転座席7に寄った手前側は押せないシーソースイッチであり、座席と反対側を押すとデフロック、もう一度押すとデフロックを解除する。
【0022】
(中段部)
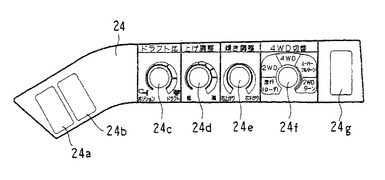
中段部24には、パネル面見取図を図5に示すように、2つのエンジン回転数記憶スイツチ24a、24b、ドラフト比調整ダイヤル24c、上げ調整ダイヤル24d、傾き調整ダイヤル24e、4WD切替スイッチ24f、水平シリンダ手動上げ下げスイッチ24g等を配置する。
【0023】
第1のエンジン回転数記憶スイツチ24aは指を離すと中立に自動で戻るシーソースイッチであり、上側がA回転数、下側がB回転数の2通り記憶できる。第2のエンジン回転数記憶スイッチ24bは指を離すと中立に自動で戻るシーソースイッチであり、上側が(+)であり、下側が(−)。第1のエンジン回転数記憶スイツチ24aでA又はBを選んだ後、第2のエンジン回転数記憶スイッチ24bの(+)を押すと回転数が上昇し、(−)を押すと回転数が下がり、スイッチを離したところの回転数が記憶される。
【0024】
ドラフト比調整ダイヤル24cはドラフトコントロールの感度を調整するダイヤルであり、圃場の状態やユーザの好みで調整する。左の「ポジション」、右の「ドラフト」の範囲で調整でき、「ポジション」側にするほど鈍くなる。詳細には、「ポジション」側(左)に回すほど負荷に対する作業機の昇降変化量が少なくなり、「ドラフト」側(右)に回すほど負荷に対する作業機の昇降変化量が大きくなる。調整による耕深および土質は、ドラフト比調整ダイヤルが「1」(左回し)の場合の「浅くする」「軽い」、また、「ドラフト」(右回し)の場合の「深くする」「重い」の範囲で調整される。
【0025】
上げ調整ダイヤル24dは、その左の「低」、右の「高」の範囲で3Pリンクの上げ高さを調整する。作業機によっては最上げにするとトラクタ本体に当たるものもあるので高さを調整する。また、不必要に上げなくてもよい作業機はこのダイヤルで調整して効率的な作業を行う。傾き調整ダイヤル24eは左の「右上がり」、右の「右下がり」の範囲で調整する。
【0026】
4WD切替スイッチ24fの「走行オート4WD」は設計変更で走行ローダに表示(名称)変更する。「走行ローダ」は路上走行ローダ作業時に使用する。通常は2輪駆動であり、ぬかるみに入ったり、急な坂道、凹凸道になると自動的に4輪駆動になるほか、ブレーキをかけると自動的に4輪駆動となる。即ち、停止距離が短くなり、運転中に停止すると4輪駆動状態になる。「2WD」は後輪駆動、「4WD」は4輪駆動である。「スーパーフルターン」は旋回時に前輪の速度が増速され、クイックな旋回となる。「2WDターン」は固い圃場などで旋回時のみ前輪の駆動を抜くことで、片ブレーキ旋回がクイックにスムーズに行える。
水平シリンダの手動上げ下げスイッチ24gは作業機の脱着等に使用し、3Pリンクの水平シリンダを手動で動かす。
【0027】
(上段部)
操作パネル22tの上段部25には、スロットルレバー25a、副変速レバー25b、サブコンレバー25c、25d、オプションのサブコンレバー25e、また、操作パネル22tの後部には、スイッチボックス26a、シガーライタ26bを配置する。
【0028】
(スイッチボックス)
次に、前記スイッチボックス26aについて説明する。
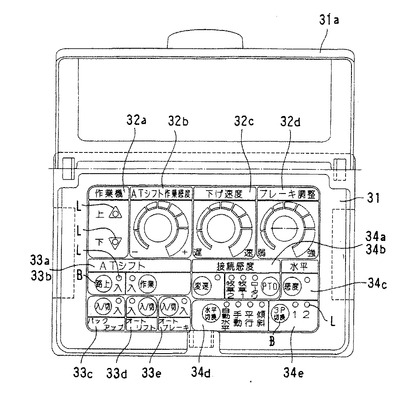
スイッチボックス26aは、その使用状態の正面図を図6に示すように、スイッチ類を複数収納したスイッチパネル31にカバー31aを開閉可能に設けて構成する。これを操作パネル22tの後部位置において運転座席7のオペレータに向けて傾斜して配置する。このスイッチボックス26aは、使用頻度が低い機能について操作部を小さくしてコンパクトに構成し、使用しない場合はオペレータの視界の外に位置し、使用する場合は運転座席7から操作できる近い位置に配置することにより、通常の作業に支障を来すことなく、ユーザにより、或いは、作業により、必要に応じて、全ての機能を運転座席7から操作することができる。
【0029】
上記スイッチボックス26aのスイッチ配置について具体的に説明する。
パネル面には、作業機上昇・下降モニターランプ32a、ATシフト作業感度ダイヤル32b、下げ速度ダイヤル32c、ブレーキ調整ダイヤル32dを比較的大きく配置し、その他、電子油圧制御を初めとする制御設定のスイッチ類33a〜33e、34a〜34eの操作ボタンBをモニターランプLとともに比較的小さく集中して配置する。
【0030】
作業機上昇・下降モニターランプ32aは、上下配置の2つのLED等のランプL、Lにより作業機昇降出力と連動してモニタ表示する。半透明樹脂によってカバー31aを形成し、カバー31aを閉じたままでモニタできるように構成する。このモニタはドラフト作業中等に効き具合を見るために便利であり、LEDを基板に入れることにより安価に構成することができる。また、カバー31aを閉じたままLEDを確認できることから、安価な構成で確認が可能になる。
【0031】
(昇降制御)
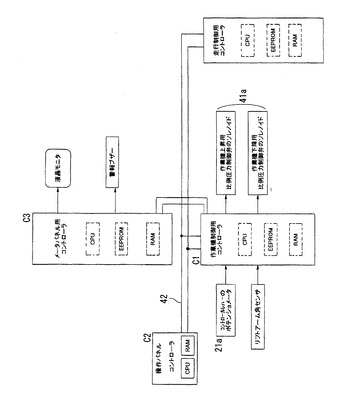
対地作業部41の昇降制御について詳細に説明すると、図7の作業部昇降制御のシステム構成図に示すように、ヒッチに接続したロータリ等の対地作業部41は、作業機制御部C1に接続している作業機昇降用の比例圧力制御弁ソレノイド41aにより駆動される昇降油圧シリンダによって昇降制御され、この作業機制御部C1は、対地作業部41の手動操作用のポジションレバーであるアームレスト21の作業機昇降レバー21aの操作信号による手動昇降を可能とし、また、作業機制御部C1は、データ通信部42を介して各種制御設定用の操作パネル制御部C2やモニタ用のメータパネル制御部C3と接続する。操作パネル制御部C2には、操作装置22の上げ調整ダイヤル24dおよびスイッチボックス26a内の設定スイッチ等の信号を入力し、条件に応じて設定高さ位置まで対地作業部41の自動昇降を可能に構成する。
【0032】
作業機制御部C1には、作業車両の起動当初における対地作業部41の昇降制御を規制するセフティ機構と、その規制解除のために、ポジションレバー21aによる所定の予備操作による解除手段とを設けるとともに、車両起動時におけるデータ通信部42のトラブル等によって操作パネル22からの通信異常があった時は、手動制御に限定し、すなわち、ポジションレバー21aの指示のみによって対地作業部41の保持高さを昇降制御可能に作業機制御部C1を構成する。
【0033】
セフティ機構の解除のための所定の予備操作について具体的に説明すると、先ず、エンジン始動時において、作業機41の位置とポジションレバー21aの位置が同じであれば、ポジションレバー21aを不感帯から離脱するように操作し、再び作業機41の位置に合わせると解除する構成である。そして、エンジン始動時において、作業機41の位置とポジションレバー21aの位置が離れている場合は、ポジションレバー21aの位置を作業機41の位置に合わせると解除する構成である。また、例外としてエンジン始動時において、作業機41の位置が最大上昇位置であり、且つポジションレバー21aの位置が作業機41の位置と同じである場合に限り直ぐに解除する構成である。
【0034】
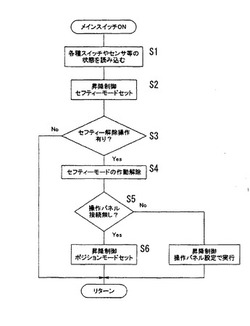
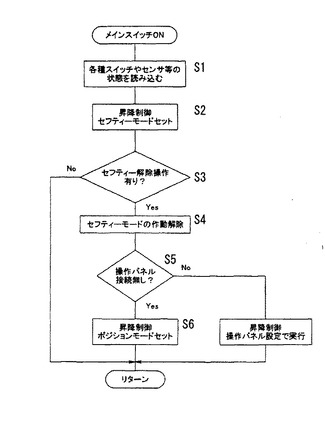
上記作業機制御部C1による車両起動の際の具体的な制御処理手順は、図8の起動時の制御処理のフローチャートに示すように、作業車両の起動当初におけるスイッチやセンサの状態読込の制御処理ステップ1(以下において「S1」の如く略記する。)に続き、セフティ機構により昇降制御の規制(S2)を行い、解除手段であるポジションレバー21aの予備操作を条件として上記規制を解除(S3,S4)することにより手動昇降制御が開始され、操作パネル22からの通信異常があった場合は手動制御に限定(S5,S6)することにより、復旧された操作パネル22からの自動昇降信号に伴う予期せぬ昇降動作を抑えつつ手動昇降が確保される。
【0035】
したがって、上記作業車両は、手動昇降と自動昇降とにより対地作業部41の多様な昇降制御を確保した上で、作業車両の起動当初におけるポジションレバー21aに起因する予期せぬ昇降動作を回避して安全に対地作業部41の昇降制御を開始することができるとともに、昇降制御の開始以降においても同様に、操作パネル22の異常に起因する予期せぬ昇降動作を招くことなく安全に対地作業部41の昇降制御を継続することができる。
【0036】
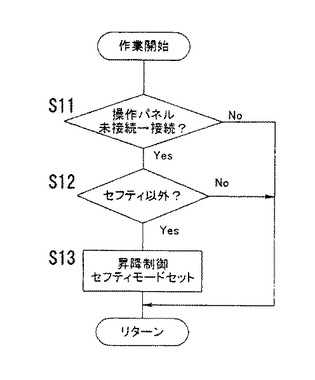
また、操作パネル22の通信異常が回復した場合については、図9の昇降制御時の制御処理のフローチャートに示すように、操作パネル22の通信異常(S11)が回復し、かつ、解除操作(S12)によってセフティ機構による規制が解除されている場合に限り、改めてセフティ機構(S13)によって対地作業部41の昇降制御を規制するように機器制御部C1の制御処理を構成することにより、操作パネル22からの通信の回復に際して、予期せぬ昇降動作を招くことなく、解除操作を介して自動昇降制御に安全に移行することができる。
【0037】
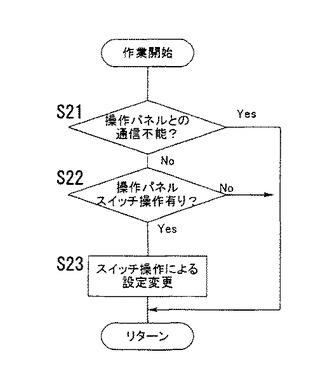
次に、操作パネル22の表示制御については、図10のフローチャートに示すように、操作パネル22の通信(S21)が正常の場合における操作パネル22のスイッチ操作(S22)に限り対応の設定変更(S23)を行うことにより、操作パネル22の通信異常の際の操作パネル22のスイッチ操作が無効であることを表示することができる。
【0038】
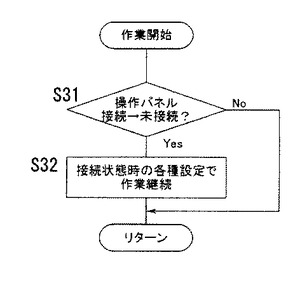
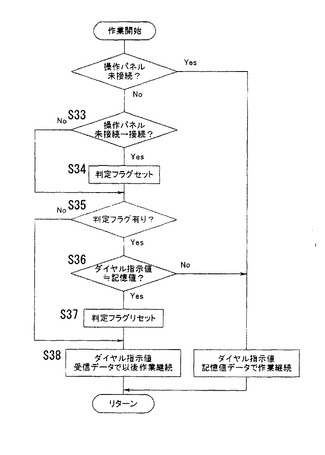
また、車両起動の後における操作パネル22の通信異常の際は、図11のフローチャートに示すように、異常発生直前の設定により昇降制御を継続(S31,S32)する制御処理を設けることにより、中断を招くことなく、作業を継続することができ、この場合において、その後に通信が復旧した際は、図12のフローチャートに示すように、復旧判定フラグに基づき(S33〜S35,S37)、操作パネル22による指示値が通信異常の発生時の指示値と略等しい場合に限り、その最新の指示値によって昇降制御(S36,S38)を行う制御処理を設けることにより、設定変更による復旧時の予期せぬ動作の急変を回避するとともに、オペレータによる再設定操作を挟むことで設定変更による新たな自動昇降制御に安全に移行することができる。
【0039】
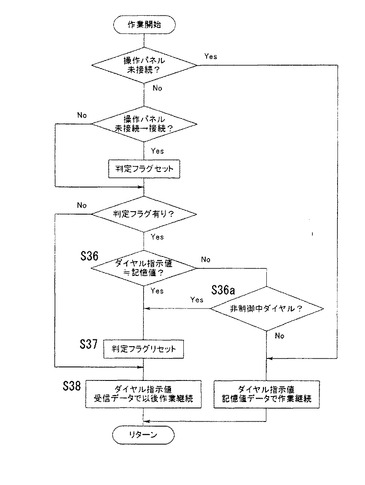
一方、設定変更が機器制御動作に影響しない場合、例えば、ブレーキ出力がされていない場合におけるブレーキ調整の変更の場合は、図13のフローチャートに示すように、操作パネル22による指示値が通信異常の発生時の指示値と異なっていても非制御中(S36a)であれば、支障がないことから、変更後の設定に移行する制御処理を設ける。
【0040】
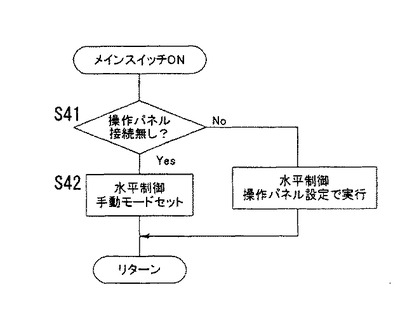
次に、セフティ機構等による制御規制を適用しない制御構成、例えば、機体の水平制御の例については、図14のフローチャートに示すように、操作パネル22の通信異常と対応して水平制御を「手動モード」に切替え(S41,S42)るように制御処理を構成することにより、予期せぬ制御動作を回避することができる。
【0041】
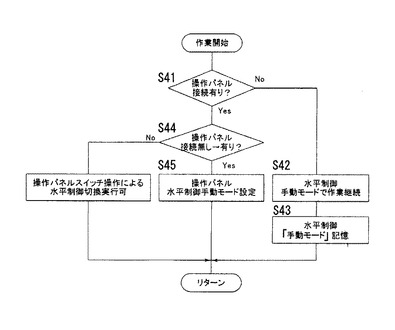
また、作業機制御部C1内に動作モードを記憶するものにおいては、図15のフローチャートに示すように、通信異常と対応して水平制御を「手動モード」に切替え(S41,S42)た時に、その動作モードとして「手動モード」を記憶(S43)することにより、通信の復旧(S44)の際に操作パネル22上の設定に実際の制御状態を反映(S45)することができる。
【0042】
(省エネ制御)
次に、省エネ制御について説明する。
エンジンパワーカーブを数馬力程度切換えが可能なコモンレールエンジンについて、図16の制御構成図に示すように、複数のパワーカーブから選択するためのパワーカーブ選択スイッチ51を本機制御部52に入力し、この選択されたパワーカーブによる噴射指令をエンジン制御用のエンジン制御部51に入力することにより、本機制御部52によるパワーカーブの選択について、スイッチ51による手動選択と条件に応じた自動選択とが可能となる。例えば、図17に例示のように、負荷率最大の場合の高トルクのトルクマップAと通常の低燃費のトルクマップBを選択可能に構成した上で、オペレータの意思でトルクマップBによる省エネモードとし、また、作業形態によって省エネモードでも十分な場合は自動で省エネモードとすることができる。
【0043】
また、アクセル開度、エンジン回転および車速等の条件により、アクセルペダルを踏込むだけで自動でシフトチェンジをするアクセルシフト変速式トラクタにおいて、省エネモードスイッチをオンにしている場合に、アクセル変速の変速条件を変更するように変速制御を構成する。具体的には、通常(N)と省エネ(E)の変速タイミングを表す変速線図を図18に示すように、「省エネ」の選択により、「通常」時よりエンジンが低回転のところで変速することにより、低速ギヤによる急加速を抑えて燃費を向上することができる。
【0044】
上記の場合において、アクセル操作による急加速を抑えるために、規制勾配によるアクセル指示の制御例を図19に示すように、アクセル指示変化を規制する規制勾配Lを設定し、アクセル開度Aの変化が規制勾配L以下の場合(a)は、そのままエンジン制御部へのアクセル指示を行い、アクセル開度Aの変化が規制勾配L以上の場合(b)は、規制勾配Lの範囲内でエンジン制御部へのアクセル指示を行うことにより、アクセルペダルを最大に踏み込んでも、エンジン回転数変化勾配を自動で緩くすることで急加速による燃料消費を抑えることができる。
【0045】
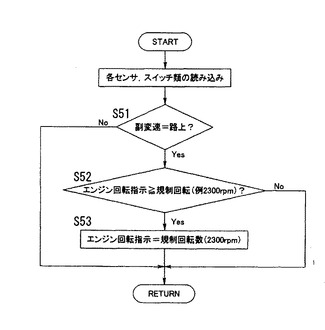
また、路上走行に際して省エネスイッチをオンにした場合については、図20の規制回転数(例えば2300rpm)による制御処理のフローチャートに示すように、副変速のポジションが「路上」(S51)の場合であり、かつ、エンジン回転指示が規制回転以上(S52)の場合は、エンジン回転指示を規制回転数(S53)とする制御処理を構成することにより、路上走行における最高回転を抑えてフルスロットル走行を無くし、燃費の向上を図ることができる。
【0046】
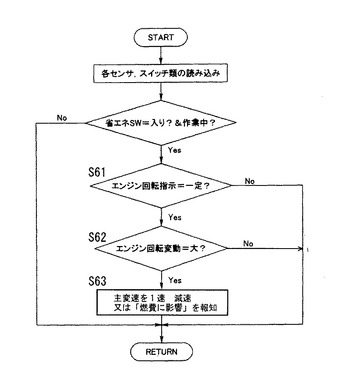
また、作業走行に際して省エネスイッチをオンにした場合については、図21のエンジン回転数による制御処理のフローチャートに示すように、作業走行によるエンジン回転指示が一定(S61)の場合に、回転変動が大(S62)であることを条件に、主変速を1速減速し、または「燃費に影響する」旨を報知(S63)する制御処理を設けることにより、過大な作業負荷によってエンジン回転の変動幅が大きい状態では燃費の向上が望めないので、負荷対応で自動変速または燃費の警告をすることにより、燃費の向上を図ることができる。
【0047】
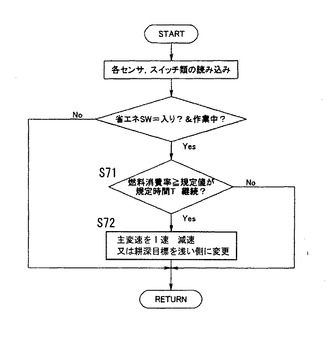
過大負荷対応制御として、別の過大負荷対応の制御処理のフローチャートを図22に示すように、作業走行に際して省エネスイッチをオンにした場合に、コモンレールエンジン制御部から送信されるエンジン情報である燃料消費率が一定値以上の状態が規定時間継続(S71)したことを条件に、主変速を1速減速し、または耕深目標を浅い側に変更(S72)する制御処理を設けることにより、負荷の掛かる作業を減らして燃費向上を図ることができる。
【符号の説明】
【0048】
1 農用トラクタ(作業車両)
7 運転座席
21 アームレスト
21a ポジションレバー
22 操作装置(操作パネル)
24c ドラフト比調整ダイヤル
24d 上げ調整ダイヤル
26a スイッチボックス
32a 作業機上昇・下降モニターランプ
41 対地作業部
42 データ通信部
C1 作業機制御部
C2 操作パネル制御部
【技術分野】
【0001】
本発明は、対地作業部の保持高さを手動または設定による指示高さに昇降制御可能に構成した対地作業部付き作業車両に関するものである。
【背景技術】
【0002】
特許文献1に示すように、昇降動作可能に装備されている対地作業部の保持高さを手動昇降用のポジションレバーと自動昇降設定用の操作パネルの指示に沿って昇降制御可能に構成することによって作業部の多様な昇降制御を確保した対地作業部付き作業車両が知られている。
【0003】
手動昇降機能については、ポジションレバーの当初の指示位置が作業部の高さと不一致のまま起動した場合に、作業部が予期せずして昇降動作するという問題があり、その解決のために、起動当初における作業部の昇降動作を規制するセフティ機構を設けるとともに、ポジションレバーの1ストロークに及ぶ予備操作によってセフティ機構による昇降規制を解除するように構成することにより、作業部の予期せぬ昇降動作に伴う不測の事態を招くことなく、作業部の手動昇降を安全に開始することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平3−160905号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、操作パネルによる自動昇降機能は、操作パネルの異常があると、ポジションレバーによるセフティ機構の解除操作以降の時点において操作パネルの指示が回復した場合に、その時点で指示に沿って作業部が予期せずに昇降動作することがあり、自動昇降機能について問題となっていた。この問題は、各種の搭載機器について多様な制御設定を可能とするべく、操作パネルと作業機制御部との間を通信手段によって接続した多機能型の作業車両において特に解決が待たれているものであった。
【0006】
本発明の目的は、手動制御用のポジションレバーと自動昇降用の操作パネルを備えて対地作業部を昇降可能に設けた対地作業部付き作業車両において、手動昇降制御についての起動時の安全確保とともに、操作パネルの異常に伴う作業部の予期せぬ昇降動作を回避して安全に昇降作業を継続することができる対地作業部付き作業車両を提供することにある。
【課題を解決するための手段】
【0007】
請求項1に係る発明は、手動操作に応じた高さ位置を指示するポジションレバーと設定高さ位置を指示する操作パネルのそれぞれの指示に沿って対地作業部の保持高さを昇降制御する作業機制御部と、車両起動当初における対地作業部の昇降制御を規制するセフティ機構と、このセフティ機構による規制をポジションレバーの所定の予備操作によって解除する解除手段とを備える対地作業部付き作業車両において、上記作業機制御部は、車両起動時に操作パネルの信号の異常があった場合に、ポジションレバーの指示に沿って対地作業部の保持高さを昇降制御する制御処理を備えたことを特徴とする。
【0008】
上記構成の作業車両は、セフティ機構とその解除手段とを備えることにより、ポジションレバーに起因する起動当初の対地作業部の昇降動作を規制した上で手動昇降制御が開始され、操作パネルからの信号の異常があった場合には手動制御に限定することにより、操作パネルからの信号回復に伴う予期せぬ昇降動作を抑えつつ、手動昇降の継続が確保される。
【0009】
請求項2に係る発明は、請求項1の構成において、前記作業機制御部は、解除手段によって昇降制御が開始された以降において操作パネルによる設定高さ位置の指示が回復された場合に、セフティ機構によって対地作業部の昇降制御を規制する制御処理を備えたことを特徴とする。
上記構成の作業車両は、操作パネルからの信号の回復に伴う対地作業部の予期せぬ昇降動作がセフティ機構によって規制され、ここで解除手段を介して昇降制御規制を解除することにより、対地作業部が設定位置に自動昇降される。
【発明の効果】
【0010】
請求項1の発明の対地作業部付き作業車両は、セフティ機構とその解除手段とを備えることにより、ポジションレバーに起因する起動当初の対地作業部の昇降動作を規制して手動昇降制御の開始が可能となり、操作パネルからの信号の異常があった場合には手動制御に限定することにより、操作パネルからの信号回復に伴う予期せぬ昇降動作を抑えつつ、手動昇降の継続が確保されることから、手動昇降と自動昇降による対地作業部の多様な昇降制御を確保した上で、起動当初におけるポジションレバーに起因する予期せぬ昇降動作を回避して安全に対地作業部の昇降制御を開始することができるとともに、昇降制御の開始以降においても、操作パネルの異常に起因する予期せぬ昇降動作を招くことなく安全に作業を継続することができる。
【0011】
請求項2に係る発明の対地作業部付き作業車両は、請求項1の効果に加え、上記構成の作業車両は、操作パネルからの信号の回復時にセフティ機構により対地作業部の昇降動作が新たに規制され、ここで解除手段を介して昇降制御規制を解除することにより、対地作業部が設定位置に自動昇降されることから、操作パネルからの信号の回復に際して、予期せぬ昇降動作を招くことなく、操作パネルに基づく自動昇降に安全に移行することができる。
【図面の簡単な説明】
【0012】
【図1】農用トラクタの機体側面図
【図2】キャビン内2の斜視図
【図3】操作装置の拡大斜視図
【図4】基段部の取付け面見取図
【図5】中段部のパネル面見取図
【図6】スイッチボックスの側面図
【図7】作業部昇降制御のシステム構成図
【図8】車両起動時の制御処理のフローチャート
【図9】通信異常が回復した場合の制御処理のフローチャート
【図10】表示制御の制御処理のフローチャート
【図11】車両起動の後における通信異常対応の制御処理のフローチャート
【図12】設定変更対応の制御処理のフローチャート
【図13】設定変更対応の別の制御処理のフローチャート
【図14】機体の水平制御の例による制御処理のフローチャート
【図15】動作モードを記憶する制御処理のフローチャート
【図16】コモンレールエンジンについての制御構成図
【図17】2つのトルクマップA,Bの例示
【図18】通常(N)と省エネ(E)の変速タイミングを表す変速線図
【図19】規制勾配によるアクセル指示の制御例
【図20】路上走行時の制御処理のフローチャート
【図21】エンジン回転数による制御処理のフローチャート
【図22】過大負荷対応の別の制御処理のフローチャート
【発明を実施するための形態】
【0013】
上記技術思想に基づいて具体的に構成された実施の形態について以下に図面を参照しつつ説明する。
本発明の作業車両の1例としての農用トラクタ1は、機体側面図を図1に示すように、左右前輪2、2と左右後輪3、3とを備えた機体の前部を覆うボンネット内にエンジン4を搭載し、このエンジン4の回転動力をミッションケース5内の変速伝動部5aに伝達し、この変速伝動部5aで適宜減速された動力を左右前輪2、2と左右後輪3、3とに伝達するとともに、3Pリンクに連結した作業機41にPTO軸を介して後部出力するように構成されている。
【0014】
(キャビン)
キャビン内には、図2の斜視図に示すように、オペレータ操作のために、ミッションケース5の上部位置に運転座席7を配置し、この運転座席7の片側のアームレスト21およびその外側方に後述の操作装置22を設けるほか、運転座席7の他側方に、駐車ブレーキ7b、PTOチェンジレバー7c、7d等を配置して操作部を構成し、また、ステアリングハンドル11の近傍に前後進切換レバー11a、基部にクラッチペダル11b、左右ブレーキペダル11c、11d、アクセルペダル11e等の走行操作具が配置される。
【0015】
アームレスト21には、作業機昇降レバー21a、作業機昇降スイッチ21b、走行変速スイッチ21c、21d等の作業走行用の操作具が配置される。
作業機昇降レバー21aは、後側が「上昇」、前側が「下降」で、機体旋回等の際に作業機を昇降する。
作業機昇降スイッチ21bは、シーソースイッチであり、後側のワンプッシュ操作で上げ調整ダイヤルで調整した最大位置まで上昇し、前側のワンプッシュ操作で作業機昇降レバー21aの位置まで下降する。
2つ一組の走行変速スイッチ21c、21dは、それぞれを1回押すごとにシフトアップ、シフトダウンし、低速8段、中速8段、高速8段、路上走行速4段の範囲で速度調整する。
【0016】
また、第1のPTOチェンジレバー7cは前から「2速」−「N(中立)」−「1速」のポジションによりPTO回転を変更する。第2のPTOチェンジレバー7dは、正逆切換(前側が正転、後側が逆転)用であり、そのバリエーションとして、エコノミーPTO切換レバー(前側が「切」、後側が「入」)の場合は、「入り」にするとPTOの回転が所定回転ダウンし、グランドPTO切換レバー(前側が「切」、後側が「入」)の場合は、「入り」にするとPTOの回転が車速にシンクロする。
【0017】
(操作パネル)
操作装置22は、各種機器の操作具とそれぞれの制御設定を行うための操作パネルとからなり、拡大斜視図を図3に示すように、操作性を向上するために作業機や走行系およびエンジン回転数等の操作部を運転座席7の片側方(図例は右側方)に集中配置したものであり、トラクタを構成する走行系および作業系の機器を制御操作するための操作具23a〜25eと、これら操作具23a〜25eを支持して運転座席7の片側方に集中配置する操作パネル22tとから構成する。
【0018】
操作パネル22tは、運転座席7と隣接する平坦状の基段部23と、その奥側から急傾斜で起立する中段部24と、その上端から奥高に緩く傾斜する上段部25とからなり、それぞれに操作具を配置する。すなわち、一体のレバーガイドで上面をカバーして構成し、運転座席7に近いところは平面部23を設け、この平面部23より奥側の座席から遠いところに、やや傾斜して平面部23よりは高い位置の傾斜部25を設け、この傾斜部25と前記平面部23を前記傾斜部より傾斜角度のきつい傾斜面24でつなぐように配置面を構成し、全ての面に各々、操作スイッチやレバー等の操作具を配置する。
【0019】
特に、運転座席7から近い基段部23と中段部24は、スイッチ等の電気系の操作具を配置し、比較的離れている上段部25はストローク動作するレバー類による操作具を配置することにより、操作具に応じた操作性を確保することができる。
【0020】
(基段部)
上記操作装置22の各操作具の具体的な説明は以下のとおりである。
基段部23には、取付け面見取図を図4に示すように、PTO入り切りスイッチ23a、PTO手動自動スイッチ23b、デフロックスイッチ23c等のトランスミッションの動力伝達と遮断を直接実施する操作スイッチを配置する。これらスイッチは、操作が比較的複雑なモード設定スイッチと異なり、操作が単純であることから、オペレータが腕を曲げた状態の比較的窮屈な姿勢でも容易に操作することができる。
【0021】
PTO入り切りスイッチ23a(左で「切り」、右で「入り」)は、押して右に回すと「入り」、「入り」状態で押すと自動で「切り」に戻る。
PTO手動自動スイッチ23b(左で「手動」、右で「自動」)は主に水田作業で利用し、「手動」の時はPTO入りでチェンジが入っていると常時回転し、「自動」の時はクラッチを踏んだり、3Pリンクを上げると回転が止まる。
デフロックスイッチ23cは、運転座席7に寄った手前側は押せないシーソースイッチであり、座席と反対側を押すとデフロック、もう一度押すとデフロックを解除する。
【0022】
(中段部)
中段部24には、パネル面見取図を図5に示すように、2つのエンジン回転数記憶スイツチ24a、24b、ドラフト比調整ダイヤル24c、上げ調整ダイヤル24d、傾き調整ダイヤル24e、4WD切替スイッチ24f、水平シリンダ手動上げ下げスイッチ24g等を配置する。
【0023】
第1のエンジン回転数記憶スイツチ24aは指を離すと中立に自動で戻るシーソースイッチであり、上側がA回転数、下側がB回転数の2通り記憶できる。第2のエンジン回転数記憶スイッチ24bは指を離すと中立に自動で戻るシーソースイッチであり、上側が(+)であり、下側が(−)。第1のエンジン回転数記憶スイツチ24aでA又はBを選んだ後、第2のエンジン回転数記憶スイッチ24bの(+)を押すと回転数が上昇し、(−)を押すと回転数が下がり、スイッチを離したところの回転数が記憶される。
【0024】
ドラフト比調整ダイヤル24cはドラフトコントロールの感度を調整するダイヤルであり、圃場の状態やユーザの好みで調整する。左の「ポジション」、右の「ドラフト」の範囲で調整でき、「ポジション」側にするほど鈍くなる。詳細には、「ポジション」側(左)に回すほど負荷に対する作業機の昇降変化量が少なくなり、「ドラフト」側(右)に回すほど負荷に対する作業機の昇降変化量が大きくなる。調整による耕深および土質は、ドラフト比調整ダイヤルが「1」(左回し)の場合の「浅くする」「軽い」、また、「ドラフト」(右回し)の場合の「深くする」「重い」の範囲で調整される。
【0025】
上げ調整ダイヤル24dは、その左の「低」、右の「高」の範囲で3Pリンクの上げ高さを調整する。作業機によっては最上げにするとトラクタ本体に当たるものもあるので高さを調整する。また、不必要に上げなくてもよい作業機はこのダイヤルで調整して効率的な作業を行う。傾き調整ダイヤル24eは左の「右上がり」、右の「右下がり」の範囲で調整する。
【0026】
4WD切替スイッチ24fの「走行オート4WD」は設計変更で走行ローダに表示(名称)変更する。「走行ローダ」は路上走行ローダ作業時に使用する。通常は2輪駆動であり、ぬかるみに入ったり、急な坂道、凹凸道になると自動的に4輪駆動になるほか、ブレーキをかけると自動的に4輪駆動となる。即ち、停止距離が短くなり、運転中に停止すると4輪駆動状態になる。「2WD」は後輪駆動、「4WD」は4輪駆動である。「スーパーフルターン」は旋回時に前輪の速度が増速され、クイックな旋回となる。「2WDターン」は固い圃場などで旋回時のみ前輪の駆動を抜くことで、片ブレーキ旋回がクイックにスムーズに行える。
水平シリンダの手動上げ下げスイッチ24gは作業機の脱着等に使用し、3Pリンクの水平シリンダを手動で動かす。
【0027】
(上段部)
操作パネル22tの上段部25には、スロットルレバー25a、副変速レバー25b、サブコンレバー25c、25d、オプションのサブコンレバー25e、また、操作パネル22tの後部には、スイッチボックス26a、シガーライタ26bを配置する。
【0028】
(スイッチボックス)
次に、前記スイッチボックス26aについて説明する。
スイッチボックス26aは、その使用状態の正面図を図6に示すように、スイッチ類を複数収納したスイッチパネル31にカバー31aを開閉可能に設けて構成する。これを操作パネル22tの後部位置において運転座席7のオペレータに向けて傾斜して配置する。このスイッチボックス26aは、使用頻度が低い機能について操作部を小さくしてコンパクトに構成し、使用しない場合はオペレータの視界の外に位置し、使用する場合は運転座席7から操作できる近い位置に配置することにより、通常の作業に支障を来すことなく、ユーザにより、或いは、作業により、必要に応じて、全ての機能を運転座席7から操作することができる。
【0029】
上記スイッチボックス26aのスイッチ配置について具体的に説明する。
パネル面には、作業機上昇・下降モニターランプ32a、ATシフト作業感度ダイヤル32b、下げ速度ダイヤル32c、ブレーキ調整ダイヤル32dを比較的大きく配置し、その他、電子油圧制御を初めとする制御設定のスイッチ類33a〜33e、34a〜34eの操作ボタンBをモニターランプLとともに比較的小さく集中して配置する。
【0030】
作業機上昇・下降モニターランプ32aは、上下配置の2つのLED等のランプL、Lにより作業機昇降出力と連動してモニタ表示する。半透明樹脂によってカバー31aを形成し、カバー31aを閉じたままでモニタできるように構成する。このモニタはドラフト作業中等に効き具合を見るために便利であり、LEDを基板に入れることにより安価に構成することができる。また、カバー31aを閉じたままLEDを確認できることから、安価な構成で確認が可能になる。
【0031】
(昇降制御)
対地作業部41の昇降制御について詳細に説明すると、図7の作業部昇降制御のシステム構成図に示すように、ヒッチに接続したロータリ等の対地作業部41は、作業機制御部C1に接続している作業機昇降用の比例圧力制御弁ソレノイド41aにより駆動される昇降油圧シリンダによって昇降制御され、この作業機制御部C1は、対地作業部41の手動操作用のポジションレバーであるアームレスト21の作業機昇降レバー21aの操作信号による手動昇降を可能とし、また、作業機制御部C1は、データ通信部42を介して各種制御設定用の操作パネル制御部C2やモニタ用のメータパネル制御部C3と接続する。操作パネル制御部C2には、操作装置22の上げ調整ダイヤル24dおよびスイッチボックス26a内の設定スイッチ等の信号を入力し、条件に応じて設定高さ位置まで対地作業部41の自動昇降を可能に構成する。
【0032】
作業機制御部C1には、作業車両の起動当初における対地作業部41の昇降制御を規制するセフティ機構と、その規制解除のために、ポジションレバー21aによる所定の予備操作による解除手段とを設けるとともに、車両起動時におけるデータ通信部42のトラブル等によって操作パネル22からの通信異常があった時は、手動制御に限定し、すなわち、ポジションレバー21aの指示のみによって対地作業部41の保持高さを昇降制御可能に作業機制御部C1を構成する。
【0033】
セフティ機構の解除のための所定の予備操作について具体的に説明すると、先ず、エンジン始動時において、作業機41の位置とポジションレバー21aの位置が同じであれば、ポジションレバー21aを不感帯から離脱するように操作し、再び作業機41の位置に合わせると解除する構成である。そして、エンジン始動時において、作業機41の位置とポジションレバー21aの位置が離れている場合は、ポジションレバー21aの位置を作業機41の位置に合わせると解除する構成である。また、例外としてエンジン始動時において、作業機41の位置が最大上昇位置であり、且つポジションレバー21aの位置が作業機41の位置と同じである場合に限り直ぐに解除する構成である。
【0034】
上記作業機制御部C1による車両起動の際の具体的な制御処理手順は、図8の起動時の制御処理のフローチャートに示すように、作業車両の起動当初におけるスイッチやセンサの状態読込の制御処理ステップ1(以下において「S1」の如く略記する。)に続き、セフティ機構により昇降制御の規制(S2)を行い、解除手段であるポジションレバー21aの予備操作を条件として上記規制を解除(S3,S4)することにより手動昇降制御が開始され、操作パネル22からの通信異常があった場合は手動制御に限定(S5,S6)することにより、復旧された操作パネル22からの自動昇降信号に伴う予期せぬ昇降動作を抑えつつ手動昇降が確保される。
【0035】
したがって、上記作業車両は、手動昇降と自動昇降とにより対地作業部41の多様な昇降制御を確保した上で、作業車両の起動当初におけるポジションレバー21aに起因する予期せぬ昇降動作を回避して安全に対地作業部41の昇降制御を開始することができるとともに、昇降制御の開始以降においても同様に、操作パネル22の異常に起因する予期せぬ昇降動作を招くことなく安全に対地作業部41の昇降制御を継続することができる。
【0036】
また、操作パネル22の通信異常が回復した場合については、図9の昇降制御時の制御処理のフローチャートに示すように、操作パネル22の通信異常(S11)が回復し、かつ、解除操作(S12)によってセフティ機構による規制が解除されている場合に限り、改めてセフティ機構(S13)によって対地作業部41の昇降制御を規制するように機器制御部C1の制御処理を構成することにより、操作パネル22からの通信の回復に際して、予期せぬ昇降動作を招くことなく、解除操作を介して自動昇降制御に安全に移行することができる。
【0037】
次に、操作パネル22の表示制御については、図10のフローチャートに示すように、操作パネル22の通信(S21)が正常の場合における操作パネル22のスイッチ操作(S22)に限り対応の設定変更(S23)を行うことにより、操作パネル22の通信異常の際の操作パネル22のスイッチ操作が無効であることを表示することができる。
【0038】
また、車両起動の後における操作パネル22の通信異常の際は、図11のフローチャートに示すように、異常発生直前の設定により昇降制御を継続(S31,S32)する制御処理を設けることにより、中断を招くことなく、作業を継続することができ、この場合において、その後に通信が復旧した際は、図12のフローチャートに示すように、復旧判定フラグに基づき(S33〜S35,S37)、操作パネル22による指示値が通信異常の発生時の指示値と略等しい場合に限り、その最新の指示値によって昇降制御(S36,S38)を行う制御処理を設けることにより、設定変更による復旧時の予期せぬ動作の急変を回避するとともに、オペレータによる再設定操作を挟むことで設定変更による新たな自動昇降制御に安全に移行することができる。
【0039】
一方、設定変更が機器制御動作に影響しない場合、例えば、ブレーキ出力がされていない場合におけるブレーキ調整の変更の場合は、図13のフローチャートに示すように、操作パネル22による指示値が通信異常の発生時の指示値と異なっていても非制御中(S36a)であれば、支障がないことから、変更後の設定に移行する制御処理を設ける。
【0040】
次に、セフティ機構等による制御規制を適用しない制御構成、例えば、機体の水平制御の例については、図14のフローチャートに示すように、操作パネル22の通信異常と対応して水平制御を「手動モード」に切替え(S41,S42)るように制御処理を構成することにより、予期せぬ制御動作を回避することができる。
【0041】
また、作業機制御部C1内に動作モードを記憶するものにおいては、図15のフローチャートに示すように、通信異常と対応して水平制御を「手動モード」に切替え(S41,S42)た時に、その動作モードとして「手動モード」を記憶(S43)することにより、通信の復旧(S44)の際に操作パネル22上の設定に実際の制御状態を反映(S45)することができる。
【0042】
(省エネ制御)
次に、省エネ制御について説明する。
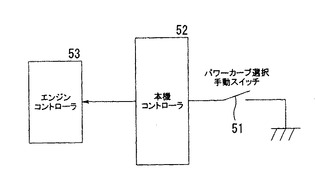
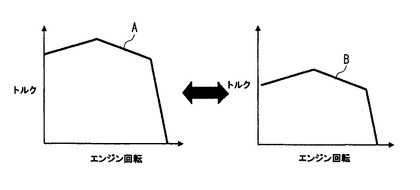
エンジンパワーカーブを数馬力程度切換えが可能なコモンレールエンジンについて、図16の制御構成図に示すように、複数のパワーカーブから選択するためのパワーカーブ選択スイッチ51を本機制御部52に入力し、この選択されたパワーカーブによる噴射指令をエンジン制御用のエンジン制御部51に入力することにより、本機制御部52によるパワーカーブの選択について、スイッチ51による手動選択と条件に応じた自動選択とが可能となる。例えば、図17に例示のように、負荷率最大の場合の高トルクのトルクマップAと通常の低燃費のトルクマップBを選択可能に構成した上で、オペレータの意思でトルクマップBによる省エネモードとし、また、作業形態によって省エネモードでも十分な場合は自動で省エネモードとすることができる。
【0043】
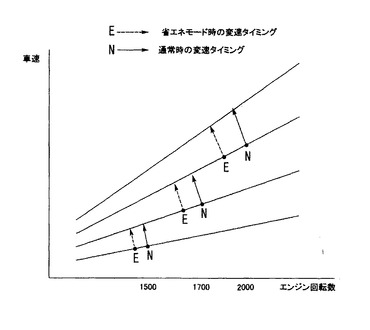
また、アクセル開度、エンジン回転および車速等の条件により、アクセルペダルを踏込むだけで自動でシフトチェンジをするアクセルシフト変速式トラクタにおいて、省エネモードスイッチをオンにしている場合に、アクセル変速の変速条件を変更するように変速制御を構成する。具体的には、通常(N)と省エネ(E)の変速タイミングを表す変速線図を図18に示すように、「省エネ」の選択により、「通常」時よりエンジンが低回転のところで変速することにより、低速ギヤによる急加速を抑えて燃費を向上することができる。
【0044】
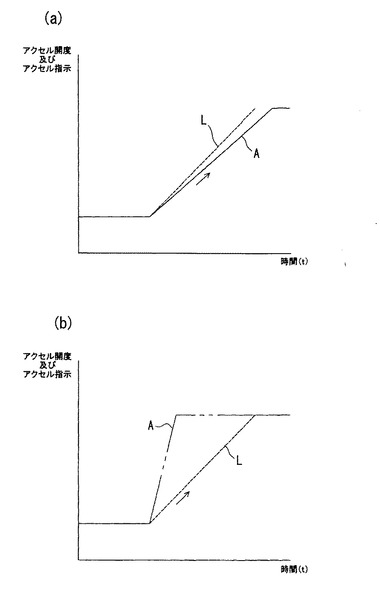
上記の場合において、アクセル操作による急加速を抑えるために、規制勾配によるアクセル指示の制御例を図19に示すように、アクセル指示変化を規制する規制勾配Lを設定し、アクセル開度Aの変化が規制勾配L以下の場合(a)は、そのままエンジン制御部へのアクセル指示を行い、アクセル開度Aの変化が規制勾配L以上の場合(b)は、規制勾配Lの範囲内でエンジン制御部へのアクセル指示を行うことにより、アクセルペダルを最大に踏み込んでも、エンジン回転数変化勾配を自動で緩くすることで急加速による燃料消費を抑えることができる。
【0045】
また、路上走行に際して省エネスイッチをオンにした場合については、図20の規制回転数(例えば2300rpm)による制御処理のフローチャートに示すように、副変速のポジションが「路上」(S51)の場合であり、かつ、エンジン回転指示が規制回転以上(S52)の場合は、エンジン回転指示を規制回転数(S53)とする制御処理を構成することにより、路上走行における最高回転を抑えてフルスロットル走行を無くし、燃費の向上を図ることができる。
【0046】
また、作業走行に際して省エネスイッチをオンにした場合については、図21のエンジン回転数による制御処理のフローチャートに示すように、作業走行によるエンジン回転指示が一定(S61)の場合に、回転変動が大(S62)であることを条件に、主変速を1速減速し、または「燃費に影響する」旨を報知(S63)する制御処理を設けることにより、過大な作業負荷によってエンジン回転の変動幅が大きい状態では燃費の向上が望めないので、負荷対応で自動変速または燃費の警告をすることにより、燃費の向上を図ることができる。
【0047】
過大負荷対応制御として、別の過大負荷対応の制御処理のフローチャートを図22に示すように、作業走行に際して省エネスイッチをオンにした場合に、コモンレールエンジン制御部から送信されるエンジン情報である燃料消費率が一定値以上の状態が規定時間継続(S71)したことを条件に、主変速を1速減速し、または耕深目標を浅い側に変更(S72)する制御処理を設けることにより、負荷の掛かる作業を減らして燃費向上を図ることができる。
【符号の説明】
【0048】
1 農用トラクタ(作業車両)
7 運転座席
21 アームレスト
21a ポジションレバー
22 操作装置(操作パネル)
24c ドラフト比調整ダイヤル
24d 上げ調整ダイヤル
26a スイッチボックス
32a 作業機上昇・下降モニターランプ
41 対地作業部
42 データ通信部
C1 作業機制御部
C2 操作パネル制御部
【特許請求の範囲】
【請求項1】
手動操作に応じた高さ位置を指示するポジションレバー(21a)と設定高さ位置を指示する操作パネル(22)のそれぞれの指示に沿って対地作業部(41)の保持高さを昇降制御する作業機制御部(C1)と、車両起動当初における対地作業部(41)の昇降制御を規制するセフティ機構と、このセフティ機構による規制をポジションレバー(21a)の所定の予備操作によって解除する解除手段とを備える対地作業部付き作業車両において、
上記作業機制御部(C1)は、車両起動時に操作パネル(22)の信号の異常があった場合に、ポジションレバー(21a)の指示に沿って対地作業部(41)の保持高さを昇降制御する制御処理を備えたことを特徴とする対地作業部付き作業車両。
【請求項2】
前記作業機制御部(C1)は、解除手段によって昇降制御が開始された以降において操作パネル(22)による設定高さ位置の指示が回復された場合に、セフティ機構によって対地作業部(41)の昇降制御を規制する制御処理を備えたことを特徴とする請求項1記載の対地作業部付き作業車両。
【請求項1】
手動操作に応じた高さ位置を指示するポジションレバー(21a)と設定高さ位置を指示する操作パネル(22)のそれぞれの指示に沿って対地作業部(41)の保持高さを昇降制御する作業機制御部(C1)と、車両起動当初における対地作業部(41)の昇降制御を規制するセフティ機構と、このセフティ機構による規制をポジションレバー(21a)の所定の予備操作によって解除する解除手段とを備える対地作業部付き作業車両において、
上記作業機制御部(C1)は、車両起動時に操作パネル(22)の信号の異常があった場合に、ポジションレバー(21a)の指示に沿って対地作業部(41)の保持高さを昇降制御する制御処理を備えたことを特徴とする対地作業部付き作業車両。
【請求項2】
前記作業機制御部(C1)は、解除手段によって昇降制御が開始された以降において操作パネル(22)による設定高さ位置の指示が回復された場合に、セフティ機構によって対地作業部(41)の昇降制御を規制する制御処理を備えたことを特徴とする請求項1記載の対地作業部付き作業車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2011−109924(P2011−109924A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−266263(P2009−266263)
【出願日】平成21年11月24日(2009.11.24)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月24日(2009.11.24)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]