
対基板作業システム
【課題】オペレータが容易に複数の基板保持装置による回路基板の保持、若しくは、解除を行うことが可能な対基板作業システムを提供する。
【解決手段】複数の作業機の上流側に配置されたものから下流側に配置されたものにわたって回路基板を搬送し、複数の作業機の対基板作業位置のうちの2以上の位置で1枚の回路基板を固定的に保持し、その1枚の回路基板に対して作業を実行可能な対基板作業システムであって、複数の作業機の基板保持装置27に対応して設けられ、回路基板の保持,解除を実行させるための複数の操作スイッチ88,89を備え、複数の操作スイッチのうちの1つの操作スイッチが操作された場合に、その1つの操作スイッチの操作に基づいて、複数の基板保持装置の作動が制御されるように構成する。この構成により、オペレータが1つのスイッチを操作するだけで、複数の基板保持装置による回路基板の保持,解除を行うことが可能となる。
【解決手段】複数の作業機の上流側に配置されたものから下流側に配置されたものにわたって回路基板を搬送し、複数の作業機の対基板作業位置のうちの2以上の位置で1枚の回路基板を固定的に保持し、その1枚の回路基板に対して作業を実行可能な対基板作業システムであって、複数の作業機の基板保持装置27に対応して設けられ、回路基板の保持,解除を実行させるための複数の操作スイッチ88,89を備え、複数の操作スイッチのうちの1つの操作スイッチが操作された場合に、その1つの操作スイッチの操作に基づいて、複数の基板保持装置の作動が制御されるように構成する。この構成により、オペレータが1つのスイッチを操作するだけで、複数の基板保持装置による回路基板の保持,解除を行うことが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の作業機によって回路基板に対する作業を実行する対基板作業システムに関するものである。
【背景技術】
【0002】
対基板作業システムには、配列された複数の作業機を備え、回路基板がそれら複数の作業機の上流側に配置されたものから下流側に配置されたものにわたって搬送されつつ、その回路基板に対してそれら複数の作業機の各々による作業が順次実行されるように構成されたものがある。下記特許文献には、そのように構成された対基板作業システムの一例が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−235480号公報
【特許文献2】特開2010−80794号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上流側に配置された作業機から下流側に配置された作業機にわたって搬送される回路基板に対して、各作業機によって作業が行われる対基板作業システムには、例えば、上記特許文献1に記載されたシステムのように、1枚の大きな回路基板に対して複数の作業機が同時に作業を行うように構成されたものがある。詳しく説明すれば、大きな回路基板、具体的には、作業機の幅よりも長い回路基板がシステム内に搬入されると、その大きな1枚の回路基板は複数の作業機内に位置する。作業機は、通常、回路基板を搬送する基板搬送装置と、その基板搬送装置によって搬送された回路基板を作業が行われる対基板作業位置において固定的に保持する基板保持装置とを備えており、複数の作業機内に1枚の回路基板が位置する場合には、その1枚の回路基板は、複数の作業機の基板保持装置によって保持される。そして、複数の基板保持装置によって保持された1枚の回路基板に対して、複数の作業機によって同時に作業が行われる。このような作業による回路基板の生産は、ペアモジュール生産と呼ばれ、効率的に大きな回路基板を生産することが可能とされている。
【0005】
ペアモジュール生産時において、回路基板に対する作業が行われている際に、複数の基板保持装置による回路基板の保持及び、回路基板の保持の解除は、作業を行うためのプログラムに従って自動で行われるようになっている。しかしながら、生産時における搬送装置,基板保持装置等の調整,生産時における回路基板の確認等を行う場合には、オペレータの意思に従って、複数の基板保持装置による回路基板の保持、若しくは、その回路基板の保持の解除を行う必要がある。このような場合に、オペレータが、複数の基板保持装置を1台毎に作動させていては、手間がかかり、時間の無駄である。本発明は、そのような実情に鑑みてなされたものであり、ペアモジュール生産時において、オペレータが容易に複数の基板保持装置による回路基板の保持、若しくは、その回路基板の保持の解除を行うことが可能な対基板作業システムを提供することを課題とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本願の請求項1に記載の対基板作業システムは、(a)回路基板を搬送する基板搬送装置と、(b)その基板搬送装置によって搬送された回路基板を、その回路基板に対する作業である対基板作業が行われる対基板作業位置において固定的に保持する基板保持装置とを有する作業機が複数配列され、それら複数の前記作業機の上流側に配置されたものから下流側に配置されたものにわたって回路基板を搬送し、前記複数の作業機の前記対基板作業位置のうちの2以上の前記対基板作業位置で1枚の回路基板を固定的に保持するとともに、その2以上の対基板作業位置で保持された1枚の回路基板に対して前記対基板作業を実行可能な対基板作業システムにおいて、当該対基板作業システムが、前記複数の作業機の前記基板保持装置に対応して設けられ、複数の前記基板保持装置のうちの自身に対応するものによる回路基板の保持と、その回路基板の保持の解除との少なくとも一方を実行させるための複数の操作スイッチと、それら複数の操作スイッチの操作に基づいて、前記複数の基板保持装置の作動を制御する制御装置とを備え、前記制御装置が、前記2以上の対基板作業位置で1枚の回路基板を保持可能な2以上の前記基板保持装置に対応する2以上の前記操作スイッチのうちの1つの前記操作スイッチが操作された場合に、その1つの操作スイッチの操作に基づいて、前記2以上の基板保持装置の作動を制御するように構成される。
【0007】
また、請求項2に記載の対基板作業システムは、請求項1に記載の対基板作業システムにおいて、前記制御装置が、前記2以上の基板保持装置が同期して1枚の回路基板を保持若しくは、1枚の回路基板の保持を解除するように、前記2以上の基板保持装置の作動を制御するように構成される。
【0008】
また、請求項3に記載の対基板作業システムは、請求項1または請求項2に記載の対基板作業システムにおいて、前記制御装置が、前記2以上の基板保持装置の作動速度が一致するように、前記2以上の基板保持装置の作動を制御するように構成される。
【0009】
また、請求項4に記載の対基板作業システムは、請求項1ないし請求項3のいずれか1つに記載の対基板作業システムにおいて、前記複数の操作スイッチが、それぞれ、前記複数の基板保持装置のうちの自身に対応するものによる回路基板の保持を実行させるためのものであり、前記複数の基板保持装置が、それぞれ、上下方向に移動可能とされ、上下方向への移動に伴って回路基板を支持する基板支持部を有し、その基板支持部によって支持された状態で回路基板を固定的に保持する構造とされ、前記制御装置が、前記1つの操作スイッチが操作された場合に、前記2以上の基板保持装置による回路基板の保持に先立って、それら2以上の基板保持装置の前記基板支持部と回路基板との上下方向における離間距離が一致するように、前記2以上の基板保持装置の作動を制御するように構成される。
【0010】
また、請求項5に記載の対基板作業システムは、請求項1ないし請求項4のいずれか1つに記載の対基板作業システムにおいて、前記複数の操作スイッチが、それぞれ、前記複数の基板保持装置のうちの自身に対応するものによる回路基板の保持を実行させるためのものであり、前記制御装置が、前記2以上の基板保持装置の回路基板を保持する力が一致するように、前記2以上の基板保持装置の作動を制御するように構成される。
【0011】
また、請求項6に記載の対基板作業システムは、請求項1ないし請求項5のいずれか1つに記載の対基板作業システムにおいて、前記複数の操作スイッチが、それぞれ、前記複数の基板保持装置のうちの自身に対応するものによる回路基板の保持を実行させるためのものであり、前記制御装置が、前記1つの操作スイッチが操作された場合に、前記2以上の基板保持装置による回路基板の保持に先立って、その回路基板が前記2以上の対基板作業位置に搬送されるように、前記搬送装置の作動を制御するように構成される。
【発明の効果】
【0012】
請求項1に記載の対基板作業システムでは、ペアモジュール生産時において、1台の作業機の操作スイッチがオペレータによって操作された場合には、回路基板の保持を行っている全ての基板保持装置、若しくは、回路基板を保持すべき全ての基板保持装置が作動させられる。つまり、操作された操作スイッチに対応する作業機の基板保持装置だけでなく、操作されていない操作スイッチに対応する作業機の基板保持装置も作動させることが可能となっている。これにより、ペアモジュール生産時において、オペレータが容易に複数の基板保持装置による回路基板の保持、若しくは、その回路基板の保持の解除を行うことが可能となる。
【0013】
また、請求項2に記載の対基板作業システムでは、複数の基板保持装置が同期して、つまり、タイミングを合わせて、1枚の回路基板の保持、若しくは、その保持の解除を実行している。これにより、回路基板を安定して保持、若しくは、回路基板の保持を安定して解除することが可能となる。詳しく言えば、例えば、1枚の大きな回路基板を複数の基板保持装置によって保持する際に、複数の基板保持装置のうちの1台の基板保持装置のみが回路基板を保持し、他の基板保持装置が回路基板を保持していないような状態では、1枚の大きな回路基板が片持ち状態とされ、回路基板が撓む虞がある。しかしながら、請求項2に記載のシステムでは、複数の基板保持装置が同期して、1枚の回路基板を保持、若しくは、その保持を解除することから、そのような片持ちの状態が殆ど発生しない。したがって、請求項2に記載のシステムによれば、ペアモジュール生産時における回路基板の保持及び、その保持の解除を安定して行うことが可能となっている。
【0014】
また、請求項3に記載の対基板作業システムでは、回路基板を保持する際、若しくは、回路基板の保持を解除する際の複数の基板保持装置の作動速度が互いに同じ速度とされている。これにより、複数の基板保持装置を適切に同期させた状態で作動させることが可能となる。
【0015】
また、請求項4に記載の対基板作業システムでは、操作スイッチの操作による回路基板の保持に先立って、基板保持装置の基板支持部と回路基板との間の離間距離が、複数の基板保持装置において、同じとなるように、それら複数の基板保持装置の作動が制御されている。複数の基板保持装置において、基板支持部と回路基板との間の離間距離は、通常、同じとされているが、例えば、緊急停止等により作業機が停止した場合には、緊急停止した作業機の基板保持装置では、基板支持部と回路基板との間の離間距離が、その基板保持装置以外の基板保持装置での離間距離と異なる場合がある。このような場合に、複数の基板保持装置の作動速度を一致させても、離間距離の異なる基板保持装置では、回路基板の保持のタイミングがズレる虞がある。したがって、請求項4に記載のシステムによれば、種々の状況に対応して、全ての基板保持装置において、回路基板の保持のタイミングを合わせることが可能となる。
【0016】
また、請求項5に記載の対基板作業システムでは、操作スイッチの操作によって回路基板を保持する際に、複数の基板保持装置の回路基板の保持力が互いに同じとされている。これにより、複数の基板保持装置によって回路基板をバランスよく保持することが可能となる。
【0017】
また、請求項6に記載の対基板作業システムでは、操作スイッチの操作による回路基板の保持に先立って、回路基板が複数の作業機の対基板作業位置に位置するように、搬送装置の作動が制御されている。これにより、複数の基板保持装置によって、回路基板を確実に保持することが可能となる。
【図面の簡単な説明】
【0018】
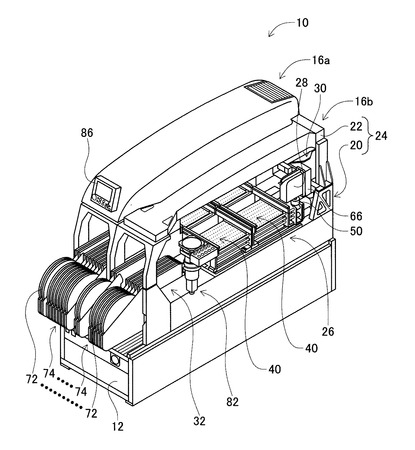
【図1】本発明の実施例である対基板作業システムを示す斜視図である。
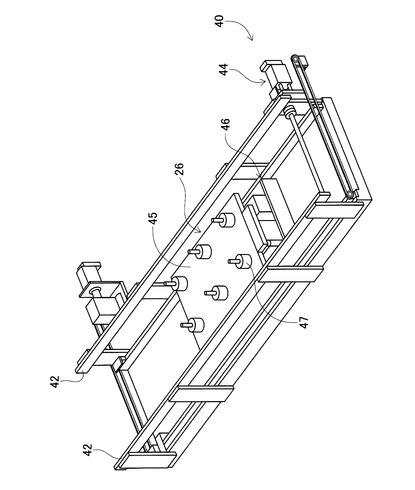
【図2】図1に示す対基板作業システムを構成する作業機の備える搬送装置および、基板保持装置を示す斜視図である。
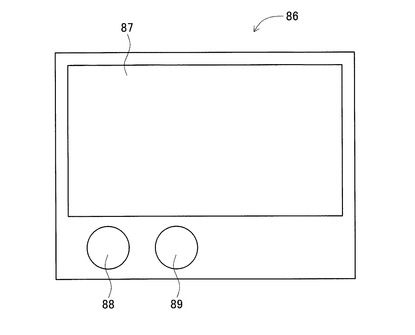
【図3】図1に示す対基板作業システムを構成する作業機の備える表示装置を示す正面図である。
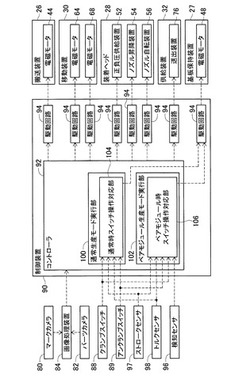
【図4】図1に示す対基板作業システムを構成する作業機の備える制御装置を示すブロック図である。
【発明を実施するための形態】
【0019】
以下、本発明を実施するための形態として、本発明の実施例を、図を参照しつつ詳しく説明する。
【0020】
<電子部品装着装置の構成>
図1に、電子部品装着装置(以下、「装着装置」と略す場合がある)10を示す。その図は、装着装置10の外装部品の一部を取り除いた斜視図である。装着装置10は、1つのシステムベース12と、そのシステムベース12の上に互いに隣接されて並んで配列された2つの電子部品装着機(以下、「装着機」と略す場合がある)16とを含んで構成されており、回路基板に電子部品を装着する作業を行うものとされている。なお、以下の説明において、装着機16の並ぶ方向をX軸方向とし、その方向に直角な水平の方向をY軸方向と称する。
【0021】
装着装置10の備える装着機16の各々は、主に、フレーム部20とそのフレーム部20に上架されたビーム部22とを含んで構成された装着機本体24と、回路基板をX軸方向に搬送する搬送装置26と、その搬送装置26によって搬送された回路基板を固定的に保持する基板保持装置27(図2参照)と、その基板保持装置27によって固定的に保持された回路基板に電子部品を装着する装着ヘッド28と、ビーム部22に配設されて装着ヘッド28をX軸方向およびY軸方向に移動させる移動装置30と、フレーム部20の前方に配設され装着ヘッド28に電子部品を供給する電子部品供給装置(以下、「供給装置」と略す場合がある)32とを備えている。
【0022】
搬送装置26は、2つのコンベア装置40を備えており、それら2つのコンベア装置40は、互いに平行、かつ、X軸方向に延びるようにフレーム部20のY軸方向での中央部に配設されている。各コンベア装置40は、図2に示すように、1対のコンベアベルト42を有しており、それら1対のコンベアベルト42を電磁モータ44によって周回させることで、コンベアベルト42上に支持される回路基板を搬送する構造とされている。
【0023】
基板保持装置27は、コンベア装置40の1対のコンベアベルト42の間に設けられた基板支持台45と、その基板支持台45を昇降させる昇降装置46と、基板支持台45の上面に着脱可能に立設された複数のバックアップピン47とを有している。基板保持装置27は、昇降装置46の駆動源である電磁モータ48(図4参照)の作動によって基板支持台45を上昇させることで、コンベアベルト42上に載置された回路基板を複数のバックアップピン48によって持ち上げ、コンベアベルト42上に設けられた鍔部(図示省略)とバックアップピン48とによって、回路基板を挟持することで回路基板を固定的に保持する構造とされている。
【0024】
また、装着ヘッド28は、基板保持装置27によって保持された回路基板に対して電子部品を装着するものであり、下面に電子部品を吸着する吸着ノズル50を有している。吸着ノズル50は、正負圧供給装置52(図4参照)を介して負圧エア,正圧エア通路に通じており、負圧にて電子部品を吸着保持し、僅かな正圧が供給されることで保持した電子部品を離脱する構造とされている。さらに、装着ヘッド28は、吸着ノズル50を昇降させるノズル昇降装置54(図4参照)および吸着ノズル50をそれの軸心回りに自転させるノズル自転装置56(図4参照)を有しており、保持する電子部品の上下方向の位置および電子部品の保持姿勢を変更することが可能とされている。なお、吸着ノズル50は、装着ヘッド28に着脱可能とされており、電子部品のサイズ,形状等に応じて変更することが可能とされている。
【0025】
移動装置30は、その装着ヘッド28をフレーム部20上の任意の位置に移動させるものであり、装着ヘッド28をX軸方向に移動させるためのX軸方向スライド機構(図示省略)と、装着ヘッド28をY軸方向に移動させるためのY軸方向スライド機構(図示省略)とを備えている。Y軸方向スライド機構は、Y軸方向に移動可能にビーム部22に設けられたY軸スライダ(図示省略)と、駆動源としての電磁モータ64(図4参照)とを有しており、その電磁モータ64によって、Y軸スライダがY軸方向の任意の位置に移動可能とされている。また、X軸方向スライド機構は、X軸方向に移動可能にY軸スライダに設けられたX軸スライダ66と、駆動源としての電磁モータ68(図4参照)とを有しており、その電磁モータ68によって、X軸スライダ66がX軸方向の任意の位置に移動可能とされている。そして、そのX軸スライダ66に装着ヘッド28が取り付けられることで、装着ヘッド28は、移動装置30によって、フレーム部20上の任意の位置に移動可能とされている。なお、装着ヘッド28は、X軸スライダ66にワンタッチで着脱可能とされており、種類の異なる作業ヘッド、例えば、ディスペンサヘッド等に変更することが可能とされている。
【0026】
また、供給装置32は、ベースとしてのフレーム部20の前方側の端部に配設されており、フィーダ型の供給装置とされている。供給装置32は、電子部品がテーピング化されたテープ化部品をリール72に巻回させた状態で収容する複数のテープフィーダ74と、それら複数のテープフィーダ74の各々に収容されているテープ化部品を送り出す複数の送出装置76(図4参照)とを有しており、テープ化部品から電子部品を装着ヘッド28への供給位置に供給する構造とされている。
【0027】
また、装着機16は、マークカメラ80(図4参照)およびパーツカメラ82(図1,図4参照)を備えている。マークカメラ80は、下方を向いた状態でX軸スライダ66の下面に固定されており、移動装置30によって移動させられることで、回路基板の表面を任意の位置において撮像することが可能となっている。一方、パーツカメラ82は、上を向いた状態でベース20上に設けられており、装置ヘッド28の有する吸着ノズル50によって吸着保持された電子部品を撮像することが可能となっている。マークカメラ80によって得られた画像データおよび、パーツカメラ82によって得られた画像データは、画像処理装置84(図4参照)において処理され、回路基板に関する情報,基板保持装置27による回路基板の保持位置誤差,吸着ノズル50による電子部品の保持位置誤差等が取得される。
【0028】
また、装着機16は、図1に示すように、ビーム部22の前方側の上端部に設けられた表示装置86を備えている。ちなみに、図1に示す装着装置10では、2台の装着機16の一方が、外装部品の一部が取り除かれた状態で示されているため、その一方の装着機16の表示装置86は図示されていないが、2台の装着機16に対応して、2台の表示装置86が設けられている。各表示装置86は、図3に示すように、装着作業等に関する情報を表示する表示画面87を有しており、その表示画面87の下方には、後に詳しく説明するクランプスイッチ88,アンクランプスイッチ89が設けられている。
【0029】
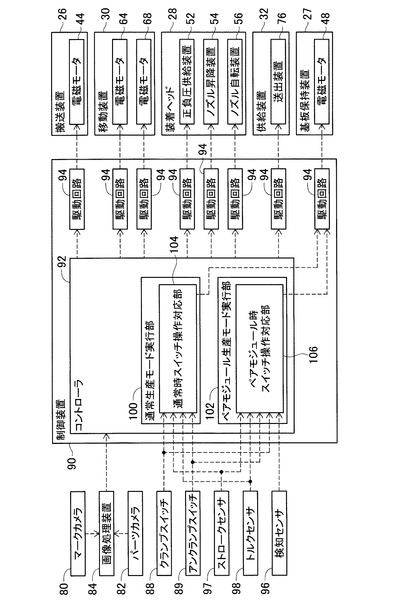
さらに、装着機16は、図4に示すように、制御装置90を備えている。制御装置90は、CPU,ROM,RAM等を備えたコンピュータを主体とするコントローラ92と、上記電磁モータ44,48,64,68,正負圧供給装置52,ノズル昇降装置54,ノズル自転装置56,送出装置76の各々に対応する複数の駆動回路94とを備えている。また、コントローラ92には、各駆動回路94を介して搬送装置,移動装置等の駆動源が接続されており、搬送装置,移動装置等の作動を制御することが可能とされている。さらに、コントローラ92には、マークカメラ80およびパーツカメラ82によって得られた画像データを処理する画像処理装置84,上記各種スイッチ88,89が接続されている。
【0030】
また、コントローラ92には、各種センサが設けられており、上記各種スイッチ88,89の操作に基づく搬送装置26及び基板保持装置27の制御に用いられる。詳しくは、コントローラ92に、検知センサ96,ストロークセンサ97,トルクセンサ98が接続されている。検知センサ96は、各装着機16の搬入口と搬出口とに設けられており、回路基板の各装着機16内への搬入、及び、各装着機16からの回路基板の搬出を検知するためのセンサである。ストロークセンサ97は、基板保持装置27を構成する基板支持台45と、その基板支持台45に支持される回路基板との間の離間距離を測定するためのセンサである。トルクセンサ98は、基板保持装置27を構成する昇降装置46の電磁モータ48の駆動力を基板支持台45に伝達するための機構に設けられており、その機構に電磁モータ48から伝達される回転トルクを測定するためのセンサである。
【0031】
<電子部品装着装置による装着作業>
本装着装置10では、上述した構成によって、各装着機16において、基板保持装置27に保持された回路基板に対して、対基板作業、つまり、装着ヘッド28による電子部品の装着作業を行うことが可能とされている。具体的に説明すれば、まず、上流側に位置する装着機(図1での左側に位置する装着機)16aにおいて、回路基板を対基板作業位置、つまり、装着作業位置まで、搬送装置26によって搬送し、その位置において回路基板を、基板保持装置27によって固定的に保持する。次に、移動装置30によって、装着ヘッド28を回路基板上に移動させ、マークカメラ80によって、回路基板を撮像する。その撮像により回路基板の種類,基板保持装置27による回路基板の保持位置誤差が取得される。その取得された回路基板の種類に応じた電子部品を、供給装置32のテープフィーダ74によって供給し、その電子部品の供給位置に、装着ヘッド28を移動装置30によって移動させる。これにより、装着ヘッド28の吸着ノズル50によって電子部品が吸着保持される。
【0032】
続いて、電子部品を保持した状態の装着ヘッド28を、移動装置30によってパーツカメラ82上に移動させ、パーツカメラ82によって、装着ヘッド28に保持された電子部品を撮像する。その撮像により電子部品の保持位置誤差が取得される。そして、移動装置30によって、装着ヘッド28を回路基板上の装着位置に移動させ、装着ヘッド28によって、回路基板および電子部品の保持位置誤差に基づいて装着ノズル50を自転させた後に,電子部品が装着される。電子部品の装着が終了した回路基板は、基板保持装置27による保持が解除され、搬送装置27によって、下流側に位置する装着機(図1での右側に位置する装着機)16bに搬送される。そして、下流側に位置する装着機16bにおいても、上流側に位置する装着機16aと同様の装着作業が実行され、回路基板が生産される。
【0033】
このように、本装着装置10では、回路基板を上流側に位置する装着機16aから下流側に位置する装着機16bに渡って搬送し、各装着機16において、その回路基板に対して順次、装着作業を行う生産モード、所謂、通常生産モードが実行可能とされている。また、本装着装置10では、2台の装着機16で同時に1枚の回路基板に対して装着作業を行う生産モード、所謂、ペアモジュール生産モードも実行可能とされている。ペアモジュール生産モードは、装着機16の幅、つまり、装着機16のX軸方向の長さよりも長い回路基板を生産するためのモードであり、2台の装着機16の基板保持装置27によって保持された1枚の回路基板に対して、2台の装着ヘッド28によって同時に装着作業が行われる。
【0034】
詳しく言えば、回路基板の搬送方向の長さが、装着機16の幅よりも長い場合には、その回路基板は、2台の装着機16に渡って位置する。その2台の装着機16に渡って位置する1枚の回路基板を、2台の装着機16の基板保持装置27によって、同時に保持し、2台の基板保持装置27によって保持された1枚の回路基板に対して、2台の装着ヘッド28によって同時に装着作業を行う。そして、2台の装着ヘッド28による装着が終了した後に、2台の基板保持装置27による回路基板の保持が解除され、回路基板が装着装置10から搬出されて、1枚の大きな回路基板が生産される。なお、制御装置90のコントローラ92には、通常生産モードにおいて装着作業を行うための機能部として、通常生産モード実行部100(図4参照)が、ペアモジュール生産モードにおいて装着作業を行うための機能部として、ペアモジュール生産モード実行部102(図4参照)が、それぞれ、設けられている。
【0035】
<装着作業時以外での回路基板の保持、及び回路基板の保持の解除>
上記通常生産モード及び、ペアモジュール生産モードでの生産時において、基板保持装置27による回路基板の保持及び、回路基板の保持の解除は、各モードでの装着作業を行うためのプログラムに従って自動で行われるようになっている。しかしながら、各生産モードでの生産時において、生産時における搬送装置26,基板保持装置27等の調整,生産時における回路基板の確認等を行う場合には、オペレータの意思に従って、基板保持装置27による回路基板の保持、若しくは、その回路基板の保持の解除を行う必要がある。このため、各装着機16には、基板保持装置27による回路基板の保持を実行させるためのクランプスイッチ88及び、基板保持装置27による回路基板の保持を解除させるためのアンクランプスイッチ89が設けられている。
【0036】
各モード時において、クランプスイッチ88,アンクランプスイッチ89が操作された場合の基板保持装置27の作動に関して、以下に詳しく説明する。まず、通常生産モード時において、アンクランプスイッチ89がオペレータによって操作された場合には、操作されたアンクランプスイッチ89に対応する装着機16において、基板保持装置27による回路基板の保持が解除される。つまり、例えば、上流側に位置する装着機16aのアンクランプスイッチ89が操作された場合には、その装着機16aの基板保持装置27の作動が制御され、回路基板の保持が解除される。なお、アンクランプスイッチ89が操作された際に、装着ヘッド28,移動装置30等の各装置が作動している場合には、作動している装置の作動が停止させられる。
【0037】
また、通常生産モード時において、クランプスイッチ88がオペレータによって操作された場合には、操作されたクランプスイッチ88に対応する装着機16において、基板保持装置27によって回路基板の保持が実行される。なお、制御装置90のコントローラ92には、通常生産モードにおいて上記各スイッチの操作に応じて基板保持装置27の作動を制御するための機能部として、通常時スイッチ操作対応部104(図4参照)が設けられている。
【0038】
また、ペアモジュール生産モード時において、1台の装着機16のアンクランプスイッチ89がオペレータによって操作された場合には、回路基板の保持を行っている基板保持装置27の全てが作動させられる。つまり、ペアモジュール生産モード時には、上述したように、2台の装着機16の基板保持装置27によって、1枚の回路基板が保持されていることから、1台の装着機16のアンクランプスイッチ89が操作された場合に、操作されたアンクランプスイッチ89に対応する装着機16だけでなく、操作されていないアンクランプスイッチ89に対応する装着機16においても、基板保持装置27による回路基板の保持が解除される。
【0039】
なお、ペアモジュール生産モード時においてアンクランプスイッチ89が操作された場合には、2台の基板保持装置27の作動が同期して、回路基板の保持の解除が行われるようになっている。具体的にいえば、基板保持装置27による回路基板の保持の解除速度、つまり、回路基板を支持している基板支持台45の降下速度が、2台の基板保持装置27において一致するように、基板支持台45を降下させる昇降装置46の電磁モータ48の作動が制御されている。
【0040】
また、ペアモジュール生産モード時において、1台の装着機16のクランプスイッチ88がオペレータによって操作された場合には、操作されたクランプスイッチ88に対応する装着機16だけでなく、操作されていないクランプスイッチ88に対応する装着機16においても、基板保持装置27による回路基板の保持が実行される。このクランプスイッチ89の操作時においても、2台の基板保持装置27の作動が同期して、回路基板の保持が行われるようになっている。
【0041】
具体的には、ペアモジュール生産モード時にクランプスイッチ88が操作された場合には、まず、2台の装着機16の装着作業位置に回路基板が搬送されているか否かが判定される。この判定には、回路基板の搬入・搬出を検出する検知センサ96が利用される。この判定方法は、公知であるため、簡単に説明すると、各検知センサ96の検知のタイミングと、検知されたタイミングからの回路基板の搬送距離とによって、回路基板の位置を推定し、2台の装着機16の装着作業位置に回路基板が搬送されているか否かを判定する方法である。そして、2台の装着機16の装着作業位置に回路基板が搬送されていないと判定された場合には、搬送装置26の作動を制御することで、回路基板を2台の装着機16の装着作業位置に搬送する。
【0042】
次に、2台の装着機16の装着作業位置に搬送された回路基板と基板保持装置27の基板支持台45との離間距離が、各装着機16において、測定される。この測定は、上記ストロークセンサ97によって行われ、2台の装着機16での回路基板と基板支持台45との離間距離が同じであるか否かが判定される。そして、2台の装着機16での離間距離が異なると判定された場合には、一方の装着機16の離間距離が、他方の装着機16の離間距離と同じになるように、その一方の装着機16の昇降装置46の作動が制御され、2台の装着機16での離間距離が一致させられる。
【0043】
続いて、回路基板を支持するための基板支持台45の上昇速度が、2台の基板保持装置27において一致するように、基板支持台45を上昇させる昇降装置46の電磁モータ48の作動が制御される。そして、基板支持台45が持ち上げられることで、コンベアベルト42上の鍔部と基板支持台45に立設されたバックアップピン48とによって、回路基板が挟持される。この回路基板を挟持する力、つまり、回路基板を保持する力も、2台の基板保持装置27において一致するように、昇降装置46の電磁モータ48の作動が制御される。具体的には、電磁モータ48の回転力を基板支持台45に伝達するための機構に設けられたトルクセンサ98によって、その機構に伝達された回転トルクを検出し、その検出値が、2台の基板保持装置27において一致するように、昇降装置46の電磁モータ48の作動が制御される。
【0044】
このように、基板支持台45の上昇前の回路基板と基板支持台45との離間距離,基板支持台45の上昇速度,基板保持装置27による回路基板の保持力の全てが一致するように、2台の装着機16の装着作業位置に搬送された回路基板を、2台の基板保持装置27が同期して保持するようになっている。なお、制御装置90のコントローラ92には、ペアモジュール生産モードにおいて、上記各スイッチの操作に応じて2台の基板保持装置27の同期作動を制御するための機能部として、ペアモジュール時スイッチ操作対応部106(図4参照)が設けられている。
【0045】
本装着装置10では、上述したように、通常生産モードでは、各装着機16のスイッチ88,89に応じて、各装着機16で回路基板の保持及び解除が行われ、ペアモジュール生産モードでは、各装着機16のスイッチ88,89に応じて、2台の装着機16で回路基板の保持・解除が行われるようになっている。このため、オペレータは、ペアモジュール生産モードにおいて回路基板の保持・解除させる際に、1台の作業機のスイッチ88,89を操作すればよく、非常に効率的である。
【0046】
また、2台の基板保持装置27が同期して、1枚の回路基板を保持、若しくは、その保持を解除することから、回路基板を安定して保持、若しくは、回路基板の保持を安定して解除することが可能となる。詳しく言えば、例えば、1枚の大きな回路基板を2台の基板保持装置27によって保持する際に、2台の基板保持装置27のうちの一方のみが回路基板を保持し、他方が保持していないような状態では、1枚の大きな回路基板が片持ち状態とされ、回路基板は撓む虞がある。しかしながら、本装着装置10では、2台の基板保持装置27が同期して、1枚の回路基板を保持、若しくは、その保持を解除することから、そのような片持ちの状態が殆ど発生しない。したがって、本装着装置10によれば、ペアモジュール生産モード時における回路基板の保持及び、その保持の解除を安定して行うことが可能となっている。
【0047】
ちなみに、上記実施例において、電子部品装着装置10は、対基板作業システムの一例であり、電子部品装着装置10を構成する電子部品装着機16は、作業機の一例である。その電子部品装着機16の搬送装置26,基板保持装置27は、基板搬送装置,基板保持装置の一例であり、その基板保持装置27の基板支持台45は、基板支持部の一例である。また、クランプスイッチ88,アンクランプスイッチ89は、操作スイッチの一例であり、制御装置90は、制御装置の一例である。
【0048】
なお、本発明は、上記実施例に限定されるものではなく、当業者の知識に基づいて種々の変更、改良を施した種々の態様で実施することが可能である。具体的には、例えば、上記実施例では、基板保持装置として、回路基板を上方に持ち上げることで、回路基板を固定的に保持する構造の基板保持装置が採用されているが、その構造の基板保持装置に限定されることなく、種々の構造のものを採用することが可能である。具体的には、回路基板の両側部を挟持することで、回路基板を固定的に保持する構造の基板保持装置,回路基板を下方に押し付けることで、回路基板を固定的に保持する構造の基板保持装置等が挙げられる。
【0049】
また、上記実施例では、作業機として、装着作業を行う装着機16が採用されているが、その他の種類の作業を実行可能なものを採用することが可能である。具体的には、回路基板上にはんだ,接着剤等を塗布するための作業機、はんだ・接着剤の印刷・塗布済みの回路基板、若しくは、電子部品装着済みの回路基板を検査するための作業機等を採用することが可能である。
【符号の説明】
【0050】
10:電子部品装着装置(対基板作業システム) 16:装着機(作業機) 26:搬送装置(基板搬送装置) 27:基板保持装置 45:基板支持台(基板支持部) 88:クランプスイッチ(操作スイッチ) 89:アンクランプスイッチ(操作スイッチ) 90:制御装置
【技術分野】
【0001】
本発明は、複数の作業機によって回路基板に対する作業を実行する対基板作業システムに関するものである。
【背景技術】
【0002】
対基板作業システムには、配列された複数の作業機を備え、回路基板がそれら複数の作業機の上流側に配置されたものから下流側に配置されたものにわたって搬送されつつ、その回路基板に対してそれら複数の作業機の各々による作業が順次実行されるように構成されたものがある。下記特許文献には、そのように構成された対基板作業システムの一例が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−235480号公報
【特許文献2】特開2010−80794号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上流側に配置された作業機から下流側に配置された作業機にわたって搬送される回路基板に対して、各作業機によって作業が行われる対基板作業システムには、例えば、上記特許文献1に記載されたシステムのように、1枚の大きな回路基板に対して複数の作業機が同時に作業を行うように構成されたものがある。詳しく説明すれば、大きな回路基板、具体的には、作業機の幅よりも長い回路基板がシステム内に搬入されると、その大きな1枚の回路基板は複数の作業機内に位置する。作業機は、通常、回路基板を搬送する基板搬送装置と、その基板搬送装置によって搬送された回路基板を作業が行われる対基板作業位置において固定的に保持する基板保持装置とを備えており、複数の作業機内に1枚の回路基板が位置する場合には、その1枚の回路基板は、複数の作業機の基板保持装置によって保持される。そして、複数の基板保持装置によって保持された1枚の回路基板に対して、複数の作業機によって同時に作業が行われる。このような作業による回路基板の生産は、ペアモジュール生産と呼ばれ、効率的に大きな回路基板を生産することが可能とされている。
【0005】
ペアモジュール生産時において、回路基板に対する作業が行われている際に、複数の基板保持装置による回路基板の保持及び、回路基板の保持の解除は、作業を行うためのプログラムに従って自動で行われるようになっている。しかしながら、生産時における搬送装置,基板保持装置等の調整,生産時における回路基板の確認等を行う場合には、オペレータの意思に従って、複数の基板保持装置による回路基板の保持、若しくは、その回路基板の保持の解除を行う必要がある。このような場合に、オペレータが、複数の基板保持装置を1台毎に作動させていては、手間がかかり、時間の無駄である。本発明は、そのような実情に鑑みてなされたものであり、ペアモジュール生産時において、オペレータが容易に複数の基板保持装置による回路基板の保持、若しくは、その回路基板の保持の解除を行うことが可能な対基板作業システムを提供することを課題とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本願の請求項1に記載の対基板作業システムは、(a)回路基板を搬送する基板搬送装置と、(b)その基板搬送装置によって搬送された回路基板を、その回路基板に対する作業である対基板作業が行われる対基板作業位置において固定的に保持する基板保持装置とを有する作業機が複数配列され、それら複数の前記作業機の上流側に配置されたものから下流側に配置されたものにわたって回路基板を搬送し、前記複数の作業機の前記対基板作業位置のうちの2以上の前記対基板作業位置で1枚の回路基板を固定的に保持するとともに、その2以上の対基板作業位置で保持された1枚の回路基板に対して前記対基板作業を実行可能な対基板作業システムにおいて、当該対基板作業システムが、前記複数の作業機の前記基板保持装置に対応して設けられ、複数の前記基板保持装置のうちの自身に対応するものによる回路基板の保持と、その回路基板の保持の解除との少なくとも一方を実行させるための複数の操作スイッチと、それら複数の操作スイッチの操作に基づいて、前記複数の基板保持装置の作動を制御する制御装置とを備え、前記制御装置が、前記2以上の対基板作業位置で1枚の回路基板を保持可能な2以上の前記基板保持装置に対応する2以上の前記操作スイッチのうちの1つの前記操作スイッチが操作された場合に、その1つの操作スイッチの操作に基づいて、前記2以上の基板保持装置の作動を制御するように構成される。
【0007】
また、請求項2に記載の対基板作業システムは、請求項1に記載の対基板作業システムにおいて、前記制御装置が、前記2以上の基板保持装置が同期して1枚の回路基板を保持若しくは、1枚の回路基板の保持を解除するように、前記2以上の基板保持装置の作動を制御するように構成される。
【0008】
また、請求項3に記載の対基板作業システムは、請求項1または請求項2に記載の対基板作業システムにおいて、前記制御装置が、前記2以上の基板保持装置の作動速度が一致するように、前記2以上の基板保持装置の作動を制御するように構成される。
【0009】
また、請求項4に記載の対基板作業システムは、請求項1ないし請求項3のいずれか1つに記載の対基板作業システムにおいて、前記複数の操作スイッチが、それぞれ、前記複数の基板保持装置のうちの自身に対応するものによる回路基板の保持を実行させるためのものであり、前記複数の基板保持装置が、それぞれ、上下方向に移動可能とされ、上下方向への移動に伴って回路基板を支持する基板支持部を有し、その基板支持部によって支持された状態で回路基板を固定的に保持する構造とされ、前記制御装置が、前記1つの操作スイッチが操作された場合に、前記2以上の基板保持装置による回路基板の保持に先立って、それら2以上の基板保持装置の前記基板支持部と回路基板との上下方向における離間距離が一致するように、前記2以上の基板保持装置の作動を制御するように構成される。
【0010】
また、請求項5に記載の対基板作業システムは、請求項1ないし請求項4のいずれか1つに記載の対基板作業システムにおいて、前記複数の操作スイッチが、それぞれ、前記複数の基板保持装置のうちの自身に対応するものによる回路基板の保持を実行させるためのものであり、前記制御装置が、前記2以上の基板保持装置の回路基板を保持する力が一致するように、前記2以上の基板保持装置の作動を制御するように構成される。
【0011】
また、請求項6に記載の対基板作業システムは、請求項1ないし請求項5のいずれか1つに記載の対基板作業システムにおいて、前記複数の操作スイッチが、それぞれ、前記複数の基板保持装置のうちの自身に対応するものによる回路基板の保持を実行させるためのものであり、前記制御装置が、前記1つの操作スイッチが操作された場合に、前記2以上の基板保持装置による回路基板の保持に先立って、その回路基板が前記2以上の対基板作業位置に搬送されるように、前記搬送装置の作動を制御するように構成される。
【発明の効果】
【0012】
請求項1に記載の対基板作業システムでは、ペアモジュール生産時において、1台の作業機の操作スイッチがオペレータによって操作された場合には、回路基板の保持を行っている全ての基板保持装置、若しくは、回路基板を保持すべき全ての基板保持装置が作動させられる。つまり、操作された操作スイッチに対応する作業機の基板保持装置だけでなく、操作されていない操作スイッチに対応する作業機の基板保持装置も作動させることが可能となっている。これにより、ペアモジュール生産時において、オペレータが容易に複数の基板保持装置による回路基板の保持、若しくは、その回路基板の保持の解除を行うことが可能となる。
【0013】
また、請求項2に記載の対基板作業システムでは、複数の基板保持装置が同期して、つまり、タイミングを合わせて、1枚の回路基板の保持、若しくは、その保持の解除を実行している。これにより、回路基板を安定して保持、若しくは、回路基板の保持を安定して解除することが可能となる。詳しく言えば、例えば、1枚の大きな回路基板を複数の基板保持装置によって保持する際に、複数の基板保持装置のうちの1台の基板保持装置のみが回路基板を保持し、他の基板保持装置が回路基板を保持していないような状態では、1枚の大きな回路基板が片持ち状態とされ、回路基板が撓む虞がある。しかしながら、請求項2に記載のシステムでは、複数の基板保持装置が同期して、1枚の回路基板を保持、若しくは、その保持を解除することから、そのような片持ちの状態が殆ど発生しない。したがって、請求項2に記載のシステムによれば、ペアモジュール生産時における回路基板の保持及び、その保持の解除を安定して行うことが可能となっている。
【0014】
また、請求項3に記載の対基板作業システムでは、回路基板を保持する際、若しくは、回路基板の保持を解除する際の複数の基板保持装置の作動速度が互いに同じ速度とされている。これにより、複数の基板保持装置を適切に同期させた状態で作動させることが可能となる。
【0015】
また、請求項4に記載の対基板作業システムでは、操作スイッチの操作による回路基板の保持に先立って、基板保持装置の基板支持部と回路基板との間の離間距離が、複数の基板保持装置において、同じとなるように、それら複数の基板保持装置の作動が制御されている。複数の基板保持装置において、基板支持部と回路基板との間の離間距離は、通常、同じとされているが、例えば、緊急停止等により作業機が停止した場合には、緊急停止した作業機の基板保持装置では、基板支持部と回路基板との間の離間距離が、その基板保持装置以外の基板保持装置での離間距離と異なる場合がある。このような場合に、複数の基板保持装置の作動速度を一致させても、離間距離の異なる基板保持装置では、回路基板の保持のタイミングがズレる虞がある。したがって、請求項4に記載のシステムによれば、種々の状況に対応して、全ての基板保持装置において、回路基板の保持のタイミングを合わせることが可能となる。
【0016】
また、請求項5に記載の対基板作業システムでは、操作スイッチの操作によって回路基板を保持する際に、複数の基板保持装置の回路基板の保持力が互いに同じとされている。これにより、複数の基板保持装置によって回路基板をバランスよく保持することが可能となる。
【0017】
また、請求項6に記載の対基板作業システムでは、操作スイッチの操作による回路基板の保持に先立って、回路基板が複数の作業機の対基板作業位置に位置するように、搬送装置の作動が制御されている。これにより、複数の基板保持装置によって、回路基板を確実に保持することが可能となる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施例である対基板作業システムを示す斜視図である。
【図2】図1に示す対基板作業システムを構成する作業機の備える搬送装置および、基板保持装置を示す斜視図である。
【図3】図1に示す対基板作業システムを構成する作業機の備える表示装置を示す正面図である。
【図4】図1に示す対基板作業システムを構成する作業機の備える制御装置を示すブロック図である。
【発明を実施するための形態】
【0019】
以下、本発明を実施するための形態として、本発明の実施例を、図を参照しつつ詳しく説明する。
【0020】
<電子部品装着装置の構成>
図1に、電子部品装着装置(以下、「装着装置」と略す場合がある)10を示す。その図は、装着装置10の外装部品の一部を取り除いた斜視図である。装着装置10は、1つのシステムベース12と、そのシステムベース12の上に互いに隣接されて並んで配列された2つの電子部品装着機(以下、「装着機」と略す場合がある)16とを含んで構成されており、回路基板に電子部品を装着する作業を行うものとされている。なお、以下の説明において、装着機16の並ぶ方向をX軸方向とし、その方向に直角な水平の方向をY軸方向と称する。
【0021】
装着装置10の備える装着機16の各々は、主に、フレーム部20とそのフレーム部20に上架されたビーム部22とを含んで構成された装着機本体24と、回路基板をX軸方向に搬送する搬送装置26と、その搬送装置26によって搬送された回路基板を固定的に保持する基板保持装置27(図2参照)と、その基板保持装置27によって固定的に保持された回路基板に電子部品を装着する装着ヘッド28と、ビーム部22に配設されて装着ヘッド28をX軸方向およびY軸方向に移動させる移動装置30と、フレーム部20の前方に配設され装着ヘッド28に電子部品を供給する電子部品供給装置(以下、「供給装置」と略す場合がある)32とを備えている。
【0022】
搬送装置26は、2つのコンベア装置40を備えており、それら2つのコンベア装置40は、互いに平行、かつ、X軸方向に延びるようにフレーム部20のY軸方向での中央部に配設されている。各コンベア装置40は、図2に示すように、1対のコンベアベルト42を有しており、それら1対のコンベアベルト42を電磁モータ44によって周回させることで、コンベアベルト42上に支持される回路基板を搬送する構造とされている。
【0023】
基板保持装置27は、コンベア装置40の1対のコンベアベルト42の間に設けられた基板支持台45と、その基板支持台45を昇降させる昇降装置46と、基板支持台45の上面に着脱可能に立設された複数のバックアップピン47とを有している。基板保持装置27は、昇降装置46の駆動源である電磁モータ48(図4参照)の作動によって基板支持台45を上昇させることで、コンベアベルト42上に載置された回路基板を複数のバックアップピン48によって持ち上げ、コンベアベルト42上に設けられた鍔部(図示省略)とバックアップピン48とによって、回路基板を挟持することで回路基板を固定的に保持する構造とされている。
【0024】
また、装着ヘッド28は、基板保持装置27によって保持された回路基板に対して電子部品を装着するものであり、下面に電子部品を吸着する吸着ノズル50を有している。吸着ノズル50は、正負圧供給装置52(図4参照)を介して負圧エア,正圧エア通路に通じており、負圧にて電子部品を吸着保持し、僅かな正圧が供給されることで保持した電子部品を離脱する構造とされている。さらに、装着ヘッド28は、吸着ノズル50を昇降させるノズル昇降装置54(図4参照)および吸着ノズル50をそれの軸心回りに自転させるノズル自転装置56(図4参照)を有しており、保持する電子部品の上下方向の位置および電子部品の保持姿勢を変更することが可能とされている。なお、吸着ノズル50は、装着ヘッド28に着脱可能とされており、電子部品のサイズ,形状等に応じて変更することが可能とされている。
【0025】
移動装置30は、その装着ヘッド28をフレーム部20上の任意の位置に移動させるものであり、装着ヘッド28をX軸方向に移動させるためのX軸方向スライド機構(図示省略)と、装着ヘッド28をY軸方向に移動させるためのY軸方向スライド機構(図示省略)とを備えている。Y軸方向スライド機構は、Y軸方向に移動可能にビーム部22に設けられたY軸スライダ(図示省略)と、駆動源としての電磁モータ64(図4参照)とを有しており、その電磁モータ64によって、Y軸スライダがY軸方向の任意の位置に移動可能とされている。また、X軸方向スライド機構は、X軸方向に移動可能にY軸スライダに設けられたX軸スライダ66と、駆動源としての電磁モータ68(図4参照)とを有しており、その電磁モータ68によって、X軸スライダ66がX軸方向の任意の位置に移動可能とされている。そして、そのX軸スライダ66に装着ヘッド28が取り付けられることで、装着ヘッド28は、移動装置30によって、フレーム部20上の任意の位置に移動可能とされている。なお、装着ヘッド28は、X軸スライダ66にワンタッチで着脱可能とされており、種類の異なる作業ヘッド、例えば、ディスペンサヘッド等に変更することが可能とされている。
【0026】
また、供給装置32は、ベースとしてのフレーム部20の前方側の端部に配設されており、フィーダ型の供給装置とされている。供給装置32は、電子部品がテーピング化されたテープ化部品をリール72に巻回させた状態で収容する複数のテープフィーダ74と、それら複数のテープフィーダ74の各々に収容されているテープ化部品を送り出す複数の送出装置76(図4参照)とを有しており、テープ化部品から電子部品を装着ヘッド28への供給位置に供給する構造とされている。
【0027】
また、装着機16は、マークカメラ80(図4参照)およびパーツカメラ82(図1,図4参照)を備えている。マークカメラ80は、下方を向いた状態でX軸スライダ66の下面に固定されており、移動装置30によって移動させられることで、回路基板の表面を任意の位置において撮像することが可能となっている。一方、パーツカメラ82は、上を向いた状態でベース20上に設けられており、装置ヘッド28の有する吸着ノズル50によって吸着保持された電子部品を撮像することが可能となっている。マークカメラ80によって得られた画像データおよび、パーツカメラ82によって得られた画像データは、画像処理装置84(図4参照)において処理され、回路基板に関する情報,基板保持装置27による回路基板の保持位置誤差,吸着ノズル50による電子部品の保持位置誤差等が取得される。
【0028】
また、装着機16は、図1に示すように、ビーム部22の前方側の上端部に設けられた表示装置86を備えている。ちなみに、図1に示す装着装置10では、2台の装着機16の一方が、外装部品の一部が取り除かれた状態で示されているため、その一方の装着機16の表示装置86は図示されていないが、2台の装着機16に対応して、2台の表示装置86が設けられている。各表示装置86は、図3に示すように、装着作業等に関する情報を表示する表示画面87を有しており、その表示画面87の下方には、後に詳しく説明するクランプスイッチ88,アンクランプスイッチ89が設けられている。
【0029】
さらに、装着機16は、図4に示すように、制御装置90を備えている。制御装置90は、CPU,ROM,RAM等を備えたコンピュータを主体とするコントローラ92と、上記電磁モータ44,48,64,68,正負圧供給装置52,ノズル昇降装置54,ノズル自転装置56,送出装置76の各々に対応する複数の駆動回路94とを備えている。また、コントローラ92には、各駆動回路94を介して搬送装置,移動装置等の駆動源が接続されており、搬送装置,移動装置等の作動を制御することが可能とされている。さらに、コントローラ92には、マークカメラ80およびパーツカメラ82によって得られた画像データを処理する画像処理装置84,上記各種スイッチ88,89が接続されている。
【0030】
また、コントローラ92には、各種センサが設けられており、上記各種スイッチ88,89の操作に基づく搬送装置26及び基板保持装置27の制御に用いられる。詳しくは、コントローラ92に、検知センサ96,ストロークセンサ97,トルクセンサ98が接続されている。検知センサ96は、各装着機16の搬入口と搬出口とに設けられており、回路基板の各装着機16内への搬入、及び、各装着機16からの回路基板の搬出を検知するためのセンサである。ストロークセンサ97は、基板保持装置27を構成する基板支持台45と、その基板支持台45に支持される回路基板との間の離間距離を測定するためのセンサである。トルクセンサ98は、基板保持装置27を構成する昇降装置46の電磁モータ48の駆動力を基板支持台45に伝達するための機構に設けられており、その機構に電磁モータ48から伝達される回転トルクを測定するためのセンサである。
【0031】
<電子部品装着装置による装着作業>
本装着装置10では、上述した構成によって、各装着機16において、基板保持装置27に保持された回路基板に対して、対基板作業、つまり、装着ヘッド28による電子部品の装着作業を行うことが可能とされている。具体的に説明すれば、まず、上流側に位置する装着機(図1での左側に位置する装着機)16aにおいて、回路基板を対基板作業位置、つまり、装着作業位置まで、搬送装置26によって搬送し、その位置において回路基板を、基板保持装置27によって固定的に保持する。次に、移動装置30によって、装着ヘッド28を回路基板上に移動させ、マークカメラ80によって、回路基板を撮像する。その撮像により回路基板の種類,基板保持装置27による回路基板の保持位置誤差が取得される。その取得された回路基板の種類に応じた電子部品を、供給装置32のテープフィーダ74によって供給し、その電子部品の供給位置に、装着ヘッド28を移動装置30によって移動させる。これにより、装着ヘッド28の吸着ノズル50によって電子部品が吸着保持される。
【0032】
続いて、電子部品を保持した状態の装着ヘッド28を、移動装置30によってパーツカメラ82上に移動させ、パーツカメラ82によって、装着ヘッド28に保持された電子部品を撮像する。その撮像により電子部品の保持位置誤差が取得される。そして、移動装置30によって、装着ヘッド28を回路基板上の装着位置に移動させ、装着ヘッド28によって、回路基板および電子部品の保持位置誤差に基づいて装着ノズル50を自転させた後に,電子部品が装着される。電子部品の装着が終了した回路基板は、基板保持装置27による保持が解除され、搬送装置27によって、下流側に位置する装着機(図1での右側に位置する装着機)16bに搬送される。そして、下流側に位置する装着機16bにおいても、上流側に位置する装着機16aと同様の装着作業が実行され、回路基板が生産される。
【0033】
このように、本装着装置10では、回路基板を上流側に位置する装着機16aから下流側に位置する装着機16bに渡って搬送し、各装着機16において、その回路基板に対して順次、装着作業を行う生産モード、所謂、通常生産モードが実行可能とされている。また、本装着装置10では、2台の装着機16で同時に1枚の回路基板に対して装着作業を行う生産モード、所謂、ペアモジュール生産モードも実行可能とされている。ペアモジュール生産モードは、装着機16の幅、つまり、装着機16のX軸方向の長さよりも長い回路基板を生産するためのモードであり、2台の装着機16の基板保持装置27によって保持された1枚の回路基板に対して、2台の装着ヘッド28によって同時に装着作業が行われる。
【0034】
詳しく言えば、回路基板の搬送方向の長さが、装着機16の幅よりも長い場合には、その回路基板は、2台の装着機16に渡って位置する。その2台の装着機16に渡って位置する1枚の回路基板を、2台の装着機16の基板保持装置27によって、同時に保持し、2台の基板保持装置27によって保持された1枚の回路基板に対して、2台の装着ヘッド28によって同時に装着作業を行う。そして、2台の装着ヘッド28による装着が終了した後に、2台の基板保持装置27による回路基板の保持が解除され、回路基板が装着装置10から搬出されて、1枚の大きな回路基板が生産される。なお、制御装置90のコントローラ92には、通常生産モードにおいて装着作業を行うための機能部として、通常生産モード実行部100(図4参照)が、ペアモジュール生産モードにおいて装着作業を行うための機能部として、ペアモジュール生産モード実行部102(図4参照)が、それぞれ、設けられている。
【0035】
<装着作業時以外での回路基板の保持、及び回路基板の保持の解除>
上記通常生産モード及び、ペアモジュール生産モードでの生産時において、基板保持装置27による回路基板の保持及び、回路基板の保持の解除は、各モードでの装着作業を行うためのプログラムに従って自動で行われるようになっている。しかしながら、各生産モードでの生産時において、生産時における搬送装置26,基板保持装置27等の調整,生産時における回路基板の確認等を行う場合には、オペレータの意思に従って、基板保持装置27による回路基板の保持、若しくは、その回路基板の保持の解除を行う必要がある。このため、各装着機16には、基板保持装置27による回路基板の保持を実行させるためのクランプスイッチ88及び、基板保持装置27による回路基板の保持を解除させるためのアンクランプスイッチ89が設けられている。
【0036】
各モード時において、クランプスイッチ88,アンクランプスイッチ89が操作された場合の基板保持装置27の作動に関して、以下に詳しく説明する。まず、通常生産モード時において、アンクランプスイッチ89がオペレータによって操作された場合には、操作されたアンクランプスイッチ89に対応する装着機16において、基板保持装置27による回路基板の保持が解除される。つまり、例えば、上流側に位置する装着機16aのアンクランプスイッチ89が操作された場合には、その装着機16aの基板保持装置27の作動が制御され、回路基板の保持が解除される。なお、アンクランプスイッチ89が操作された際に、装着ヘッド28,移動装置30等の各装置が作動している場合には、作動している装置の作動が停止させられる。
【0037】
また、通常生産モード時において、クランプスイッチ88がオペレータによって操作された場合には、操作されたクランプスイッチ88に対応する装着機16において、基板保持装置27によって回路基板の保持が実行される。なお、制御装置90のコントローラ92には、通常生産モードにおいて上記各スイッチの操作に応じて基板保持装置27の作動を制御するための機能部として、通常時スイッチ操作対応部104(図4参照)が設けられている。
【0038】
また、ペアモジュール生産モード時において、1台の装着機16のアンクランプスイッチ89がオペレータによって操作された場合には、回路基板の保持を行っている基板保持装置27の全てが作動させられる。つまり、ペアモジュール生産モード時には、上述したように、2台の装着機16の基板保持装置27によって、1枚の回路基板が保持されていることから、1台の装着機16のアンクランプスイッチ89が操作された場合に、操作されたアンクランプスイッチ89に対応する装着機16だけでなく、操作されていないアンクランプスイッチ89に対応する装着機16においても、基板保持装置27による回路基板の保持が解除される。
【0039】
なお、ペアモジュール生産モード時においてアンクランプスイッチ89が操作された場合には、2台の基板保持装置27の作動が同期して、回路基板の保持の解除が行われるようになっている。具体的にいえば、基板保持装置27による回路基板の保持の解除速度、つまり、回路基板を支持している基板支持台45の降下速度が、2台の基板保持装置27において一致するように、基板支持台45を降下させる昇降装置46の電磁モータ48の作動が制御されている。
【0040】
また、ペアモジュール生産モード時において、1台の装着機16のクランプスイッチ88がオペレータによって操作された場合には、操作されたクランプスイッチ88に対応する装着機16だけでなく、操作されていないクランプスイッチ88に対応する装着機16においても、基板保持装置27による回路基板の保持が実行される。このクランプスイッチ89の操作時においても、2台の基板保持装置27の作動が同期して、回路基板の保持が行われるようになっている。
【0041】
具体的には、ペアモジュール生産モード時にクランプスイッチ88が操作された場合には、まず、2台の装着機16の装着作業位置に回路基板が搬送されているか否かが判定される。この判定には、回路基板の搬入・搬出を検出する検知センサ96が利用される。この判定方法は、公知であるため、簡単に説明すると、各検知センサ96の検知のタイミングと、検知されたタイミングからの回路基板の搬送距離とによって、回路基板の位置を推定し、2台の装着機16の装着作業位置に回路基板が搬送されているか否かを判定する方法である。そして、2台の装着機16の装着作業位置に回路基板が搬送されていないと判定された場合には、搬送装置26の作動を制御することで、回路基板を2台の装着機16の装着作業位置に搬送する。
【0042】
次に、2台の装着機16の装着作業位置に搬送された回路基板と基板保持装置27の基板支持台45との離間距離が、各装着機16において、測定される。この測定は、上記ストロークセンサ97によって行われ、2台の装着機16での回路基板と基板支持台45との離間距離が同じであるか否かが判定される。そして、2台の装着機16での離間距離が異なると判定された場合には、一方の装着機16の離間距離が、他方の装着機16の離間距離と同じになるように、その一方の装着機16の昇降装置46の作動が制御され、2台の装着機16での離間距離が一致させられる。
【0043】
続いて、回路基板を支持するための基板支持台45の上昇速度が、2台の基板保持装置27において一致するように、基板支持台45を上昇させる昇降装置46の電磁モータ48の作動が制御される。そして、基板支持台45が持ち上げられることで、コンベアベルト42上の鍔部と基板支持台45に立設されたバックアップピン48とによって、回路基板が挟持される。この回路基板を挟持する力、つまり、回路基板を保持する力も、2台の基板保持装置27において一致するように、昇降装置46の電磁モータ48の作動が制御される。具体的には、電磁モータ48の回転力を基板支持台45に伝達するための機構に設けられたトルクセンサ98によって、その機構に伝達された回転トルクを検出し、その検出値が、2台の基板保持装置27において一致するように、昇降装置46の電磁モータ48の作動が制御される。
【0044】
このように、基板支持台45の上昇前の回路基板と基板支持台45との離間距離,基板支持台45の上昇速度,基板保持装置27による回路基板の保持力の全てが一致するように、2台の装着機16の装着作業位置に搬送された回路基板を、2台の基板保持装置27が同期して保持するようになっている。なお、制御装置90のコントローラ92には、ペアモジュール生産モードにおいて、上記各スイッチの操作に応じて2台の基板保持装置27の同期作動を制御するための機能部として、ペアモジュール時スイッチ操作対応部106(図4参照)が設けられている。
【0045】
本装着装置10では、上述したように、通常生産モードでは、各装着機16のスイッチ88,89に応じて、各装着機16で回路基板の保持及び解除が行われ、ペアモジュール生産モードでは、各装着機16のスイッチ88,89に応じて、2台の装着機16で回路基板の保持・解除が行われるようになっている。このため、オペレータは、ペアモジュール生産モードにおいて回路基板の保持・解除させる際に、1台の作業機のスイッチ88,89を操作すればよく、非常に効率的である。
【0046】
また、2台の基板保持装置27が同期して、1枚の回路基板を保持、若しくは、その保持を解除することから、回路基板を安定して保持、若しくは、回路基板の保持を安定して解除することが可能となる。詳しく言えば、例えば、1枚の大きな回路基板を2台の基板保持装置27によって保持する際に、2台の基板保持装置27のうちの一方のみが回路基板を保持し、他方が保持していないような状態では、1枚の大きな回路基板が片持ち状態とされ、回路基板は撓む虞がある。しかしながら、本装着装置10では、2台の基板保持装置27が同期して、1枚の回路基板を保持、若しくは、その保持を解除することから、そのような片持ちの状態が殆ど発生しない。したがって、本装着装置10によれば、ペアモジュール生産モード時における回路基板の保持及び、その保持の解除を安定して行うことが可能となっている。
【0047】
ちなみに、上記実施例において、電子部品装着装置10は、対基板作業システムの一例であり、電子部品装着装置10を構成する電子部品装着機16は、作業機の一例である。その電子部品装着機16の搬送装置26,基板保持装置27は、基板搬送装置,基板保持装置の一例であり、その基板保持装置27の基板支持台45は、基板支持部の一例である。また、クランプスイッチ88,アンクランプスイッチ89は、操作スイッチの一例であり、制御装置90は、制御装置の一例である。
【0048】
なお、本発明は、上記実施例に限定されるものではなく、当業者の知識に基づいて種々の変更、改良を施した種々の態様で実施することが可能である。具体的には、例えば、上記実施例では、基板保持装置として、回路基板を上方に持ち上げることで、回路基板を固定的に保持する構造の基板保持装置が採用されているが、その構造の基板保持装置に限定されることなく、種々の構造のものを採用することが可能である。具体的には、回路基板の両側部を挟持することで、回路基板を固定的に保持する構造の基板保持装置,回路基板を下方に押し付けることで、回路基板を固定的に保持する構造の基板保持装置等が挙げられる。
【0049】
また、上記実施例では、作業機として、装着作業を行う装着機16が採用されているが、その他の種類の作業を実行可能なものを採用することが可能である。具体的には、回路基板上にはんだ,接着剤等を塗布するための作業機、はんだ・接着剤の印刷・塗布済みの回路基板、若しくは、電子部品装着済みの回路基板を検査するための作業機等を採用することが可能である。
【符号の説明】
【0050】
10:電子部品装着装置(対基板作業システム) 16:装着機(作業機) 26:搬送装置(基板搬送装置) 27:基板保持装置 45:基板支持台(基板支持部) 88:クランプスイッチ(操作スイッチ) 89:アンクランプスイッチ(操作スイッチ) 90:制御装置
【特許請求の範囲】
【請求項1】
(a)回路基板を搬送する基板搬送装置と、(b)その基板搬送装置によって搬送された回路基板を、その回路基板に対する作業である対基板作業が行われる対基板作業位置において固定的に保持する基板保持装置とを有する作業機が複数配列され、それら複数の前記作業機の上流側に配置されたものから下流側に配置されたものにわたって回路基板を搬送し、前記複数の作業機の前記対基板作業位置のうちの2以上の前記対基板作業位置で1枚の回路基板を固定的に保持するとともに、その2以上の対基板作業位置で保持された1枚の回路基板に対して前記対基板作業を実行可能な対基板作業システムにおいて、
当該対基板作業システムが、
前記複数の作業機の前記基板保持装置に対応して設けられ、複数の前記基板保持装置のうちの自身に対応するものによる回路基板の保持と、その回路基板の保持の解除との少なくとも一方を実行させるための複数の操作スイッチと、
それら複数の操作スイッチの操作に基づいて、前記複数の基板保持装置の作動を制御する制御装置と
を備え、
前記制御装置が、
前記2以上の対基板作業位置で1枚の回路基板を保持可能な2以上の前記基板保持装置に対応する2以上の前記操作スイッチのうちの1つの前記操作スイッチが操作された場合に、その1つの操作スイッチの操作に基づいて、前記2以上の基板保持装置の作動を制御するように構成された対基板作業システム。
【請求項2】
前記制御装置が、
前記2以上の基板保持装置が同期して1枚の回路基板を保持若しくは、1枚の回路基板の保持を解除するように、前記2以上の基板保持装置の作動を制御するように構成された請求項1に記載の対基板作業システム。
【請求項3】
前記制御装置が、
前記2以上の基板保持装置の作動速度が一致するように、前記2以上の基板保持装置の作動を制御するように構成された請求項1または請求項2に記載の対基板作業システム。
【請求項4】
前記複数の操作スイッチが、それぞれ、
前記複数の基板保持装置のうちの自身に対応するものによる回路基板の保持を実行させるためのものであり、
前記複数の基板保持装置が、それぞれ、
上下方向に移動可能とされ、上下方向への移動に伴って回路基板を支持する基板支持部を有し、その基板支持部によって支持された状態で回路基板を固定的に保持する構造とされ、
前記制御装置が、
前記1つの操作スイッチが操作された場合に、前記2以上の基板保持装置による回路基板の保持に先立って、それら2以上の基板保持装置の前記基板支持部と回路基板との上下方向における離間距離が一致するように、前記2以上の基板保持装置の作動を制御するように構成された請求項1ないし請求項3のいずれか1つに記載の対基板作業システム。
【請求項5】
前記複数の操作スイッチが、それぞれ、
前記複数の基板保持装置のうちの自身に対応するものによる回路基板の保持を実行させるためのものであり、
前記制御装置が、
前記2以上の基板保持装置の回路基板を保持する力が一致するように、前記2以上の基板保持装置の作動を制御するように構成された請求項1ないし請求項4のいずれか1つに記載の対基板作業システム。
【請求項6】
前記複数の操作スイッチが、それぞれ、
前記複数の基板保持装置のうちの自身に対応するものによる回路基板の保持を実行させるためのものであり、
前記制御装置が、
前記1つの操作スイッチが操作された場合に、前記2以上の基板保持装置による回路基板の保持に先立って、その回路基板が前記2以上の対基板作業位置に搬送されるように、前記搬送装置の作動を制御するように構成された請求項1ないし請求項5のいずれか1つに記載の対基板作業システム。
【請求項1】
(a)回路基板を搬送する基板搬送装置と、(b)その基板搬送装置によって搬送された回路基板を、その回路基板に対する作業である対基板作業が行われる対基板作業位置において固定的に保持する基板保持装置とを有する作業機が複数配列され、それら複数の前記作業機の上流側に配置されたものから下流側に配置されたものにわたって回路基板を搬送し、前記複数の作業機の前記対基板作業位置のうちの2以上の前記対基板作業位置で1枚の回路基板を固定的に保持するとともに、その2以上の対基板作業位置で保持された1枚の回路基板に対して前記対基板作業を実行可能な対基板作業システムにおいて、
当該対基板作業システムが、
前記複数の作業機の前記基板保持装置に対応して設けられ、複数の前記基板保持装置のうちの自身に対応するものによる回路基板の保持と、その回路基板の保持の解除との少なくとも一方を実行させるための複数の操作スイッチと、
それら複数の操作スイッチの操作に基づいて、前記複数の基板保持装置の作動を制御する制御装置と
を備え、
前記制御装置が、
前記2以上の対基板作業位置で1枚の回路基板を保持可能な2以上の前記基板保持装置に対応する2以上の前記操作スイッチのうちの1つの前記操作スイッチが操作された場合に、その1つの操作スイッチの操作に基づいて、前記2以上の基板保持装置の作動を制御するように構成された対基板作業システム。
【請求項2】
前記制御装置が、
前記2以上の基板保持装置が同期して1枚の回路基板を保持若しくは、1枚の回路基板の保持を解除するように、前記2以上の基板保持装置の作動を制御するように構成された請求項1に記載の対基板作業システム。
【請求項3】
前記制御装置が、
前記2以上の基板保持装置の作動速度が一致するように、前記2以上の基板保持装置の作動を制御するように構成された請求項1または請求項2に記載の対基板作業システム。
【請求項4】
前記複数の操作スイッチが、それぞれ、
前記複数の基板保持装置のうちの自身に対応するものによる回路基板の保持を実行させるためのものであり、
前記複数の基板保持装置が、それぞれ、
上下方向に移動可能とされ、上下方向への移動に伴って回路基板を支持する基板支持部を有し、その基板支持部によって支持された状態で回路基板を固定的に保持する構造とされ、
前記制御装置が、
前記1つの操作スイッチが操作された場合に、前記2以上の基板保持装置による回路基板の保持に先立って、それら2以上の基板保持装置の前記基板支持部と回路基板との上下方向における離間距離が一致するように、前記2以上の基板保持装置の作動を制御するように構成された請求項1ないし請求項3のいずれか1つに記載の対基板作業システム。
【請求項5】
前記複数の操作スイッチが、それぞれ、
前記複数の基板保持装置のうちの自身に対応するものによる回路基板の保持を実行させるためのものであり、
前記制御装置が、
前記2以上の基板保持装置の回路基板を保持する力が一致するように、前記2以上の基板保持装置の作動を制御するように構成された請求項1ないし請求項4のいずれか1つに記載の対基板作業システム。
【請求項6】
前記複数の操作スイッチが、それぞれ、
前記複数の基板保持装置のうちの自身に対応するものによる回路基板の保持を実行させるためのものであり、
前記制御装置が、
前記1つの操作スイッチが操作された場合に、前記2以上の基板保持装置による回路基板の保持に先立って、その回路基板が前記2以上の対基板作業位置に搬送されるように、前記搬送装置の作動を制御するように構成された請求項1ないし請求項5のいずれか1つに記載の対基板作業システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−110284(P2013−110284A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254627(P2011−254627)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000237271)富士機械製造株式会社 (775)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000237271)富士機械製造株式会社 (775)
【Fターム(参考)】
[ Back to top ]