
対戦型ロボットシステム
【課題】互いに対決する両対戦型ロボットにそれぞれの電源線を用いて有線で電源を供給しながら、対戦型ロボットが移動することによって両電源線が互いに絡まることを防ぐ。
【解決手段】本発明は、有線で電源が提供されて互いに対戦する二つの対戦型ロボットと、上記各対戦型ロボットに電源を提供する電源部と、上記両対戦型ロボットの上部に位置して一定の長さを有し、ある一地点を回転軸として回転可能に具現された回転部材と、を含み、上記電源部はそれぞれの電源線を通して有線で電源を上記各対戦型ロボットに提供し、上記各電源線は上記電源部から始まって上記回転部材の回転軸から長さ方向に沿って両端部にそれぞれ形成されて上記両端部から上記各対戦型ロボットまでつながり、上記回転部材は上記各対戦型ロボットの移動によって上記回転軸を中心として回転することにより上記両電源線が互いに絡まることを防ぐ対戦型ロボットシステムを提供する。
【解決手段】本発明は、有線で電源が提供されて互いに対戦する二つの対戦型ロボットと、上記各対戦型ロボットに電源を提供する電源部と、上記両対戦型ロボットの上部に位置して一定の長さを有し、ある一地点を回転軸として回転可能に具現された回転部材と、を含み、上記電源部はそれぞれの電源線を通して有線で電源を上記各対戦型ロボットに提供し、上記各電源線は上記電源部から始まって上記回転部材の回転軸から長さ方向に沿って両端部にそれぞれ形成されて上記両端部から上記各対戦型ロボットまでつながり、上記回転部材は上記各対戦型ロボットの移動によって上記回転軸を中心として回転することにより上記両電源線が互いに絡まることを防ぐ対戦型ロボットシステムを提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、対戦型ロボットシステムに関するもので、特に、互いに対決する両対戦型ロボットにそれぞれの電源線を用いて有線で電源を供給しながら、対戦型ロボットが移動することによって両電源線が互いに絡まることを防ぐようにした対戦型ロボットシステムに関する。
【背景技術】
【0002】
ロボット(robot)産業は日々発展を重ねており、将来には国家競争力を決める重要な産業の一つになると予想される。最近、ロボット技術の発展に伴い様々な形態のロボットが開発されつつある。例えば、犬の形のペット用ロボット、室内の掃除のための掃除用ロボット、一定の空間内で互いに対戦する対戦型ロボットなどが市場に出ている。このようなロボットはそれぞれの用途に合わせて製作されている。
【0003】
このようなロボットは別途の電池を装着した後その電池が切れるまでのみ動作することができる。従って、一定の時間が経つと電池の放電により動作を止め、この場合再び電池を充電するか取り替えなければならないという厄介さがあった。
【0004】
このような問題点を解決するため、無線で電源を供給する技術が紹介されている。例えば、特許文献1、特許文献2、特許文献3には、自動車のような電気機器の底に備えられた複数の導電体パネルを通して(+)及び(−)電源を同時に供給することによりDC電源を提供する技術が提示されている。
【0005】
ところが、このような技術では電源供給のために底の全体に多数の導電体パネルを備え電気機器などに導電体パネルを通して電源が供給される方式であるため、常にパネルに接触した状態を維持する電気機器には適するが、両足で直立歩行する対戦型ロボットは足がパネルから離れるときが多いため電源を安定して供給することが困難であった。また、ロボット内には導電体パネルを通して供給された電源を整流するための回路が備えられなければならないという厄介さがあった。
【0006】
従って、対戦型ロボットに安定して電源を供給するためには別途の電源線を用いて有線で電源を供給することが好ましい。しかし、有線で電源を供給すると対戦型ロボットの移動に制約が多くなり、特に二つの対戦型ロボットがそれぞれ移動することによって各ロボットに連結された両電源線が互いに絡まる現象が発生し、ロボットの移動に制約があるという問題点がある。
【0007】
従って、該当技術分野では対戦型ロボットに電源線を用いて有線で電源を安定して供給しながらもロボットの移動によって電源線が互いに絡まることを防止することのできる技術の開発が求められている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】大韓民国特許第10−0438255号
【特許文献2】米国特許第5,868,076号
【特許文献3】米国特許第6,044,767号
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は、上記の従来技術の問題点を解決するため提案されたもので、二つの対戦型ロボットにそれぞれの電源線を用いて有線で電源を安定して供給すると同時に、対戦型ロボットが移動することによって両電源線が互いに絡まることを防ぐようにした対戦型ロボットシステムを提供することにその目的がある。
【0010】
また、本発明は有線で電源を供給する二つの対戦型ロボットが電源供給線が絡まることなく自由に移動できるようにする対戦型ロボットシステムを提供することに他の目的がある。
【0011】
さらに、本発明は電源を供給する電源線に対戦型ロボットの腕が接触しないようにすることにより、対戦型ロボットの動作に対する制限を最小化するようにした対戦型ロボットシステムを提供することに他の目的がある。
【課題を解決するための手段】
【0012】
上記の目的を達成するための本発明は、
有線で電源が提供され互いに対戦する二つの対戦型ロボットと、
上記各対戦型ロボットに電源を提供する電源部と、
上記両対戦型ロボットの上部または下部に位置して一定の長さを有し、ある一地点を回転軸として回転可能に具現された回転部材と、を含み、
上記電源部は、それぞれの電源線を通して有線で電源を上記各対戦型ロボットに提供し、上記各電源線は上記電源部から始まって上記回転部材の回転軸から長さ方向に沿って両端部にそれぞれ形成され、上記両端部から上記各対戦型ロボットまでつながり、上記回転部材は上記各対戦型ロボットの移動によって上記回転軸を中心として回転することにより上記両電源線が互いに絡まることを防ぐようにしたことを特徴とする対戦型ロボットシステムを提供する。
【0013】
本発明において、上記回転部材は、回転時に上記電源部から提供された上記両電源線が互いに絡まったり上記両電源線それぞれが自主的に絡まることを防止するために、上記回転軸部分に第1線絡まり防止手段を含むことが好ましい。
【0014】
本発明において、上記回転部材は、回転時に上記両対戦型ロボットに連結された上記両電源線が互いに絡まったり上記両電源線それぞれが自主的に絡まることを防止するために、上記回転部材の両端部に第2線絡まり防止手段を含むことができる。
【0015】
本発明において、上記回転部材の回転時に上記両対戦型ロボットに連結された両電源線が互いに絡まることを防止するために、上記両ロボットの上部に第3線絡まり防止手段が形成されることができる。
【0016】
本発明において、上記回転部材は、一定の長さを有する円筒形で具現されて上記電源線が上記円筒形の内部に形成されることが好ましい。
【0017】
本発明において、回転部材の回転軸に連結されたシャフトをさらに含むことができる。
【0018】
本発明において、上記回転部材の両端部と上記各対戦型ロボットとの間の各電源線は、上記対戦型ロボットの移動に自由に対応するために長さが可変するよう具現されることが好ましい。この際、上記各電源線は螺線(spiral)状に具現されて長さが可変することがより好ましい。
【0019】
本発明において、上記各対戦型ロボットに有無線で制御信号を提供して上記ロボットを制御するコントローラ部をさらに含むこともできる。この場合、上記一つの電源線で電源と制御信号を提供することができる。また、上記電源は交流電源(AC)であり、上記交流電源に電力線通信(PLC)を用いて上記制御信号を上記ロボットに提供することができる。
【0020】
本発明において、上記対戦型ロボットは、自分に連結された電源線に接触しないよう腕を動作するように設定することが好ましい。
【発明の効果】
【0021】
本発明によると、二台の対戦型ロボットに有線で電源を安定して供給しながら両ロボットに連結された電源線が互いに絡まることを防止することによりロボットの移動が自由になるようにすることができる。
【0022】
また、本発明によると、二台の対戦型ロボットに連結された電源線が絡まって電源線の内部の導体が切れたり被服が剥がれて短絡するという問題点を防ぐことができる。
【0023】
また、本発明によると、各対戦型ロボットに線絡まり防止手段を設けることにより、該当ロボットに連結された電源線がロボットの動作に制約を与えることを防ぐことができる。
【0024】
さらに、本発明によると、対戦型ロボットに連結された電源線にロボットの腕が接触しないよう腕の動作を予め設定することにより、電源線によってロボットの対戦のための動作に制約を与えることを事前に防止することができる。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施例による対戦型ロボットシステムの概略図である。
【図2】本発明の一実施例による回転部材を上部から見た図面である。
【図3】本発明の一実施例による線絡まり防止手段の内部構造を表した断面図である。
【図4】本発明の一実施例による対戦型ロボットの腕動作を示した概略図である。
【発明を実施するための形態】
【0026】
以下において、本発明の好ましい実施例を図示した図面を参照に本発明を詳しく説明する。
【0027】
図1は、本発明の一実施例による対戦型ロボットシステムの概略図である。
【0028】
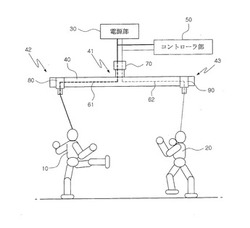
図1を参照すると、本発明の一実施例による対戦型ロボットシステムは、対戦型ロボット10、20、電源部30及び回転部材40を含んで構成される。また、本発明の他の実施例において、このような対戦型ロボットシステムはコントローラ部50をさらに含むこともできる。
【0029】
対戦型ロボット10、20は一定の空間内で互いに対決するロボットである。図面には一例として二つの対戦型ロボットが図示されているが、本発明の他の例においては一つまたは二つ以上の対戦型ロボットが提供されることもできる。しかし、本発明では二つの対戦型ロボットが互いに対決することが好ましい。このような対戦型ロボット10、20は電源線61、62を用いて電源部30から有線で電源が提供される。
【0030】
電源部30は、それぞれの電源線61、62を通して各対戦型ロボット10、20に電源を供給する。この際、ロボット10、20に供給される電源はACまたはDC電源であり得る。
【0031】
回転部材40は一定の長さを有し対戦型ロボット10、20の上部または下部に配置することが好ましい。図面には一例として上部に配置された形態を図示している。このような回転部材40は、ある一地点を 回転軸41として回転可能に具現される。好ましくは、中心軸41は回転部材40の中央部に位置する。本発明の一例において回転部材40は内部が中空の円筒形で具現され、その内部に電源線61、62が提供されるようにすることができる。
【0032】
上述のように、本発明において電源部30は、電源線61、62を通して対戦型ロボット10、20に電源を供給する。この際、このような電源線61、62は電源部30から始まって回転部材40の 回転軸41を経て長さ方向に沿って両端部42、43にそれぞれ形成され、両端部42、43から再び下部に位置した各対戦型ロボット10、20まで連結される。このように対戦型ロボット10、20と回転部材40の両端部42、43はそれぞれの電源線61、62で連結される。これによって回転部材40は各対戦型ロボット10、20が移動するに伴いその回転軸41を中心として回転することになり、両電源線61、62が互いに絡まることを防ぐようにする。
【0033】
本発明による回転部材40は、回転軸41を中心として回転するとき、電源部30から提供された両電源線61、62が回転軸41において互いに絡まることを防止するために、回転軸41の部分に第1線絡まり防止手段70を含む。即ち、第1線絡まり防止手段70は電源部30から回転部材40を通して両対戦型ロボット10、20に連結された両電源線61、62が、回転部材40の回転によって回転軸41で互いに絡まることを防ぐ。
【0034】
また、本発明による回転部材40は、回転軸41を中心として回転するとき、回転部材40の両端部42、43にそれぞれ第2線絡まり防止手段80、90をさらに含むこともできる。これは電源部30から回転部材40を通して両対戦型ロボット10、20に連結された両電源線61、62が、回転部材40の回転によって両端部42、43において互いに絡まったり両電源線61、62それぞれが自主的に絡まらないようにする。
【0035】
さらに、本発明では、選択的に各対戦型ロボット10、20にそれぞれ第3線絡まり防止手段(未図示)を備えることもできる。これは、回転部材40が回転軸41を中心として回転するとき、各対戦型ロボット10、20に提供された第3線絡まり防止手段(未図示)を用いて回転部材40の回転によって両端部42、43において両電源線61、62が互いに絡まったり両電源線61、62のそれぞれが自主的に絡まらないようにする。本発明において第2及び第3線絡まり防止手段は両方或いはいずれか一つのみ備えることができる。このような第1乃至第3線絡まり防止手段については下記においてより詳しく説明する。
【0036】
一方、上述のように本発明の他の実施例では、対戦型ロボットシステムが各対戦型ロボット10、20に有無線で制御信号を提供してロボット10、20を制御するコントローラ部50をさらに含むことができる。このようなコントローラ部50は有線または無線で各対戦型ロボット10、20を調整することができる。この際、有線で調整する場合、電源線61、62を通して電源供給及び制御信号を共に提供することができる。即ち、一つの電源線(61または62)を用いて電源及び制御信号を提供することができる。また、本発明の他の実施例では、電源部30とコントローラ部50を一つのユニットで具現することもできる。
【0037】
図2は、本発明の一実施例による回転部材を上部から見た図面である。
【0038】
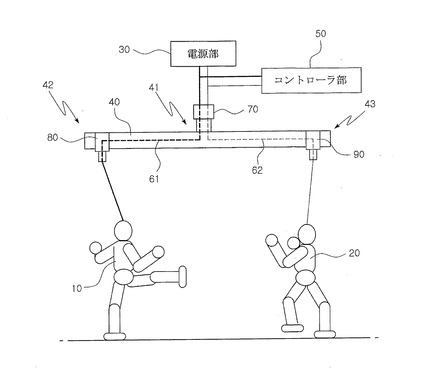
図2を参照すると、本発明による回転部材40は、中心部に第1線絡まり防止手段70が形成され、第1線絡まり防止手段70の内部を通して両電源線61、62が提供される。このような両電源線61、62は再び回転部材40の長さ方向に沿ってそれぞれ両端部42、43に進行して下部の各対戦型ロボット10、20にそれぞれ連結される。
【0039】
図面には正確に図示してはいないが、回転部材40の両端部42、43にはそれぞれ第2線絡まり防止手段80、90が形成されることもできる。上述のように、第2線絡まり防止手段80、90を形成しない場合には、各対戦型ロボット10、20に第3線絡まり防止手段(未図示)を選択的に形成することもできる。このような第1乃至第3線絡まり防止手段は同じ装置で具現されることが好ましい。
【0040】
このような第1乃至第3線絡まり防止手段は、回転部材40が回転軸41を中心として回転するとき両電源線61、62が互いに絡まらないようにする。即ち、各対戦型ロボット10、20と回転部材40は電源線61、62を通して連結されているため、対戦型ロボット10、20が互いに対決するために移動すると、回転部材40はこのような対戦型ロボット10、20の移動に対応して自然に回転するようになる。従って、このような回転部材40が回転することによって両電源線61、62が互いに絡まったりそれぞれが自主的に絡まったりしないようにする。
【0041】
ここで、本発明の電源線61、62のうち回転部材40の両端部42、43と対戦型ロボット10、20との間に連結された部分63、64は、その長さが可変するよう具現されることが好ましい。例えば、各電源線61、62のその部分63、64を螺線(spiral)のように具現し、対戦型ロボット10、20が移動することによってその長さが可変するようにすることができる。これは、対戦型ロボット10、20が互いに対決する途中において、回転部材40から遠く離れたある場所に移動する場合に回転部材40に無理をかけないようにするためである。
【0042】
図3は、本発明の一実施例による線絡まり防止手段の内部構造を表した断面図である。
【0043】
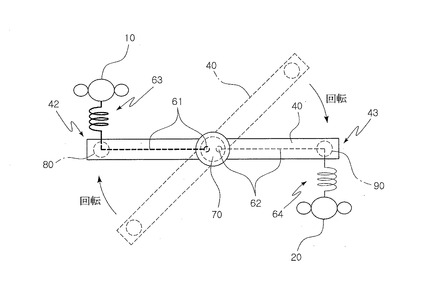
図3を参照すると、本発明の一実施例による線絡まり防止手段100は、大きく外部ハウジング110と内部回転体120を含んで構成される。内部回転体120は上述の回転部材40と連結される。この際、外部ハウジング110及び内部回転体120は円筒形で具現されることが好ましい。このような構造において内部回転体120は外部ハウジング110内に形成され、下部に前述の回転部材40と物理的に連結される。従って、回転部材40が回転することによって内部回転体120は回転軸を中心として360度に回転する構造を有する。即ち、外部ハウジング110と内部回転体120との間には上部ベアリング130及び下部ベアリング140が形成され、内部回転体120が外部ハウジング110内で回転するように具現される。また、外部ハウジング110の内部には内部回転体120と接触する接触部150、160が上部及び下部にそれぞれ存在する。このような接触部150、160は外部ハウジング110の内周面に沿って360度円形で形成される。
【0044】
外部ハウジング110には電源部30から提供された電源線61、62がそれぞれ挿入される。この際、このような各電源線61、62は外部ハウジング110と内部回転体120との間に形成された上部及び下部接触部150、160にそれぞれ電気的に連結される。即ち、両電源線61、62のいずれか一つは上部接触部150に、他の一つは下部接触部160に電気的に連結される。このような連結は内部回転体120が外部ハウジング110内で回転しても維持される。これを下記において図3(a)及び図3(b)を参照に、より具体的に説明する。
【0045】
図3(a)及び図3(b)は、回転部材40が回転することによって内部回転体120が外部ハウジング110内で互いに90度回転した状態を図示している。先ず、図3(a)を参照すると、両電源線61、62のうち第1電源線61は下部接触部160に電気的に連結されており、第2電源線62は上部接触部150に電気的に連結されている。図面には各電源線61、62が3つの小さい電気線からなると図示されているが、これは一例に過ぎず、少なくとも一つ以上の電気線からなることができる。このように、図3(a)では外部ハウジング110に挿入された各電源線61、62が上部及び下部接触部150、160を通して内部回転体120の電源線61、62に電気的に連結され、この電源線61、62は続いて回転部材40に沿って両端部42、43を通して各対戦型ロボット10、20まで連結される。
【0046】
次に、図3(b)は図3(a)において回転部材40が180度回転することによって内部回転体120も180度だけ回転した状態を図示している。図3(b)を参照すると、内部回転体120が回転しても両電源線61、62のうち第1電源線61は下部接触部160に電気的に連結され続けており、第2電源線62は上部接触部150に電気的に連結され続けている。
【0047】
従って、図3(a)及び図3(b)に図示されたとおり、回転部材40が回転して内部回転体120が回転しても、電源線61、62は各接触部150、160に電気的に連結された状態を維持する。これによって回転部材40の回転にもかかわらず両電源線61、62は互いに絡まらなくなる。
【0048】
このような線絡まり防止手段は、回転部材40の回転軸41と両端部42、43、或いは各対戦型ロボット10、20に選択的に設けられることができ、本発明では回転部材40の回転軸41に設けられ、両端部42、43または対戦型ロボット10、20のいずれか一方に設けられることが好ましい。この際、対戦型ロボット10、20に設けられた場合、連結された電源線との接触を最小化するためロボットのヘッドに設けられることがより好ましい。
【0049】
本発明において回転部材40の回転軸41にシャフト(未図示)が形成されることもできる。これは、シャフトを回転軸とすることにより、より安定した構造が形成できるようにするためである。また、各電源線61、62に複数の電気線を形成して、電源だけでなくロボットの制御信号も共に提供することができる。このようなロボットの制御信号は有線でロボットを制御する信号である。従って、一つの電源線(61または62)で電源と制御信号を共に提供することができる。例えば、電力線通信(PLC:Power Line Communication)を用いることにより、電源を供給するための電力線を伝送媒体としてロボット制御信号のデータを伝送することができる。
【0050】
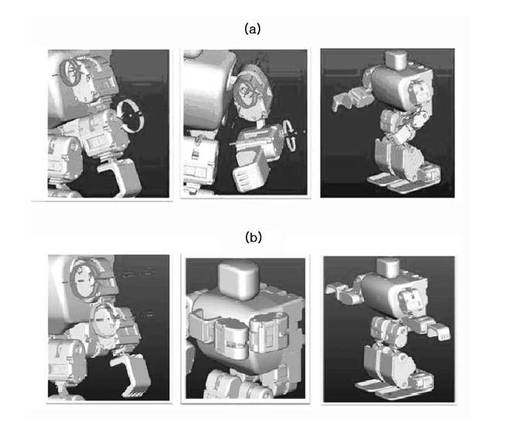
図4は、本発明の一実施例による対戦型ロボットの腕動作を示した概略図である。
【0051】
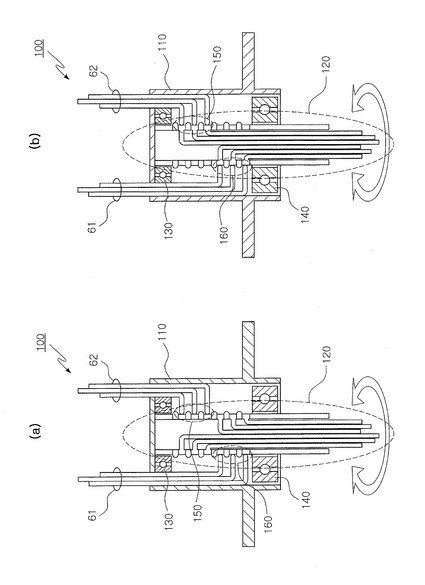
図4を参照すると、本発明の対戦型ロボットシステムでは、有線で対戦型ロボット10、20に供給するため、ロボット10、20の移動だけでなくロボット10、20の動作時にもロボット10、20がそれぞれの電源線61、62に接触しないようにすることが重要である。このために対戦型ロボット10、20は自分に連結された電源線61、62に接触しないように腕を動作するよう設定されることが好ましい。
【0052】
図面に図示されたとおり、一般に3軸腕構造を有するヒューマノイドロボットの場合、2つの形態の腕結合構造を有する。これを具体的にみると、その一つは図4(a)のようなウォーキング型(walking type)の腕構造であり、他の一つは図4(b)のようなダンシング型(dancing type)の腕構造である。ところが、図4(b)ではロボットの腕が胸の方に曲がるため連結された電源線と接触する確率が高い。しかし、図4(a)ではロボット10、20の腕が胸の方に曲がらないため電源線61、62との接触を最小化することができる。
【0053】
上述のように、本発明では、各対戦型ロボット10、20は自分に連結された電源線61、62に接触しないように腕を動作するよう設定される。
【0054】
一方、上述の本発明は単なる好ましい実施例であり、本発明のこのような実施例の記載内容に限られるものではない。即ち、上述の本願の技術思想の範囲内で様々な改良及び改造が可能であり、これらが添付の特許請求範囲に属するものであれば、いかなるものも本発明の技術的範囲に該当するということは自明である。
【産業上の利用可能性】
【0055】
最近、無線ロボットを教育やエンターテインメント分野に適用するという動きが活発になっている。特に、ロボットをスポーツに応用するという試みが続いているということを考えると、試合中にロボットに電源を有線で安定して供給すると同時に、試合中に電源線が互いに絡まらないようにすることが重要な要素になりつつある。
【0056】
このような面から見ると、本発明は電源線を用いてロボットに電源を安定して供給しながら、その電源線がロボットの移動時に互いに絡まらないようにすることにより、対戦型ロボットに非常に適することは自明である。
【0057】
さらに、本発明の技術的思想範囲内で電源線が絡まることを防止するため様々な実施例が具現可能であり、今後ロボットを用いたゲーム産業分野に非常に有用であると予想される。
【符号の説明】
【0058】
10、20 対戦型ロボット
30 電源部
40 回転部材
50 コントローラ部
61、62 電源線
70、80、90 第1〜第3線絡まり防止手段
110 外部ハウジング
120 内部回転体
130、140 ベアリング
150、160 上部及び下部接触部
【技術分野】
【0001】
本発明は、対戦型ロボットシステムに関するもので、特に、互いに対決する両対戦型ロボットにそれぞれの電源線を用いて有線で電源を供給しながら、対戦型ロボットが移動することによって両電源線が互いに絡まることを防ぐようにした対戦型ロボットシステムに関する。
【背景技術】
【0002】
ロボット(robot)産業は日々発展を重ねており、将来には国家競争力を決める重要な産業の一つになると予想される。最近、ロボット技術の発展に伴い様々な形態のロボットが開発されつつある。例えば、犬の形のペット用ロボット、室内の掃除のための掃除用ロボット、一定の空間内で互いに対戦する対戦型ロボットなどが市場に出ている。このようなロボットはそれぞれの用途に合わせて製作されている。
【0003】
このようなロボットは別途の電池を装着した後その電池が切れるまでのみ動作することができる。従って、一定の時間が経つと電池の放電により動作を止め、この場合再び電池を充電するか取り替えなければならないという厄介さがあった。
【0004】
このような問題点を解決するため、無線で電源を供給する技術が紹介されている。例えば、特許文献1、特許文献2、特許文献3には、自動車のような電気機器の底に備えられた複数の導電体パネルを通して(+)及び(−)電源を同時に供給することによりDC電源を提供する技術が提示されている。
【0005】
ところが、このような技術では電源供給のために底の全体に多数の導電体パネルを備え電気機器などに導電体パネルを通して電源が供給される方式であるため、常にパネルに接触した状態を維持する電気機器には適するが、両足で直立歩行する対戦型ロボットは足がパネルから離れるときが多いため電源を安定して供給することが困難であった。また、ロボット内には導電体パネルを通して供給された電源を整流するための回路が備えられなければならないという厄介さがあった。
【0006】
従って、対戦型ロボットに安定して電源を供給するためには別途の電源線を用いて有線で電源を供給することが好ましい。しかし、有線で電源を供給すると対戦型ロボットの移動に制約が多くなり、特に二つの対戦型ロボットがそれぞれ移動することによって各ロボットに連結された両電源線が互いに絡まる現象が発生し、ロボットの移動に制約があるという問題点がある。
【0007】
従って、該当技術分野では対戦型ロボットに電源線を用いて有線で電源を安定して供給しながらもロボットの移動によって電源線が互いに絡まることを防止することのできる技術の開発が求められている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】大韓民国特許第10−0438255号
【特許文献2】米国特許第5,868,076号
【特許文献3】米国特許第6,044,767号
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は、上記の従来技術の問題点を解決するため提案されたもので、二つの対戦型ロボットにそれぞれの電源線を用いて有線で電源を安定して供給すると同時に、対戦型ロボットが移動することによって両電源線が互いに絡まることを防ぐようにした対戦型ロボットシステムを提供することにその目的がある。
【0010】
また、本発明は有線で電源を供給する二つの対戦型ロボットが電源供給線が絡まることなく自由に移動できるようにする対戦型ロボットシステムを提供することに他の目的がある。
【0011】
さらに、本発明は電源を供給する電源線に対戦型ロボットの腕が接触しないようにすることにより、対戦型ロボットの動作に対する制限を最小化するようにした対戦型ロボットシステムを提供することに他の目的がある。
【課題を解決するための手段】
【0012】
上記の目的を達成するための本発明は、
有線で電源が提供され互いに対戦する二つの対戦型ロボットと、
上記各対戦型ロボットに電源を提供する電源部と、
上記両対戦型ロボットの上部または下部に位置して一定の長さを有し、ある一地点を回転軸として回転可能に具現された回転部材と、を含み、
上記電源部は、それぞれの電源線を通して有線で電源を上記各対戦型ロボットに提供し、上記各電源線は上記電源部から始まって上記回転部材の回転軸から長さ方向に沿って両端部にそれぞれ形成され、上記両端部から上記各対戦型ロボットまでつながり、上記回転部材は上記各対戦型ロボットの移動によって上記回転軸を中心として回転することにより上記両電源線が互いに絡まることを防ぐようにしたことを特徴とする対戦型ロボットシステムを提供する。
【0013】
本発明において、上記回転部材は、回転時に上記電源部から提供された上記両電源線が互いに絡まったり上記両電源線それぞれが自主的に絡まることを防止するために、上記回転軸部分に第1線絡まり防止手段を含むことが好ましい。
【0014】
本発明において、上記回転部材は、回転時に上記両対戦型ロボットに連結された上記両電源線が互いに絡まったり上記両電源線それぞれが自主的に絡まることを防止するために、上記回転部材の両端部に第2線絡まり防止手段を含むことができる。
【0015】
本発明において、上記回転部材の回転時に上記両対戦型ロボットに連結された両電源線が互いに絡まることを防止するために、上記両ロボットの上部に第3線絡まり防止手段が形成されることができる。
【0016】
本発明において、上記回転部材は、一定の長さを有する円筒形で具現されて上記電源線が上記円筒形の内部に形成されることが好ましい。
【0017】
本発明において、回転部材の回転軸に連結されたシャフトをさらに含むことができる。
【0018】
本発明において、上記回転部材の両端部と上記各対戦型ロボットとの間の各電源線は、上記対戦型ロボットの移動に自由に対応するために長さが可変するよう具現されることが好ましい。この際、上記各電源線は螺線(spiral)状に具現されて長さが可変することがより好ましい。
【0019】
本発明において、上記各対戦型ロボットに有無線で制御信号を提供して上記ロボットを制御するコントローラ部をさらに含むこともできる。この場合、上記一つの電源線で電源と制御信号を提供することができる。また、上記電源は交流電源(AC)であり、上記交流電源に電力線通信(PLC)を用いて上記制御信号を上記ロボットに提供することができる。
【0020】
本発明において、上記対戦型ロボットは、自分に連結された電源線に接触しないよう腕を動作するように設定することが好ましい。
【発明の効果】
【0021】
本発明によると、二台の対戦型ロボットに有線で電源を安定して供給しながら両ロボットに連結された電源線が互いに絡まることを防止することによりロボットの移動が自由になるようにすることができる。
【0022】
また、本発明によると、二台の対戦型ロボットに連結された電源線が絡まって電源線の内部の導体が切れたり被服が剥がれて短絡するという問題点を防ぐことができる。
【0023】
また、本発明によると、各対戦型ロボットに線絡まり防止手段を設けることにより、該当ロボットに連結された電源線がロボットの動作に制約を与えることを防ぐことができる。
【0024】
さらに、本発明によると、対戦型ロボットに連結された電源線にロボットの腕が接触しないよう腕の動作を予め設定することにより、電源線によってロボットの対戦のための動作に制約を与えることを事前に防止することができる。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施例による対戦型ロボットシステムの概略図である。
【図2】本発明の一実施例による回転部材を上部から見た図面である。
【図3】本発明の一実施例による線絡まり防止手段の内部構造を表した断面図である。
【図4】本発明の一実施例による対戦型ロボットの腕動作を示した概略図である。
【発明を実施するための形態】
【0026】
以下において、本発明の好ましい実施例を図示した図面を参照に本発明を詳しく説明する。
【0027】
図1は、本発明の一実施例による対戦型ロボットシステムの概略図である。
【0028】
図1を参照すると、本発明の一実施例による対戦型ロボットシステムは、対戦型ロボット10、20、電源部30及び回転部材40を含んで構成される。また、本発明の他の実施例において、このような対戦型ロボットシステムはコントローラ部50をさらに含むこともできる。
【0029】
対戦型ロボット10、20は一定の空間内で互いに対決するロボットである。図面には一例として二つの対戦型ロボットが図示されているが、本発明の他の例においては一つまたは二つ以上の対戦型ロボットが提供されることもできる。しかし、本発明では二つの対戦型ロボットが互いに対決することが好ましい。このような対戦型ロボット10、20は電源線61、62を用いて電源部30から有線で電源が提供される。
【0030】
電源部30は、それぞれの電源線61、62を通して各対戦型ロボット10、20に電源を供給する。この際、ロボット10、20に供給される電源はACまたはDC電源であり得る。
【0031】
回転部材40は一定の長さを有し対戦型ロボット10、20の上部または下部に配置することが好ましい。図面には一例として上部に配置された形態を図示している。このような回転部材40は、ある一地点を 回転軸41として回転可能に具現される。好ましくは、中心軸41は回転部材40の中央部に位置する。本発明の一例において回転部材40は内部が中空の円筒形で具現され、その内部に電源線61、62が提供されるようにすることができる。
【0032】
上述のように、本発明において電源部30は、電源線61、62を通して対戦型ロボット10、20に電源を供給する。この際、このような電源線61、62は電源部30から始まって回転部材40の 回転軸41を経て長さ方向に沿って両端部42、43にそれぞれ形成され、両端部42、43から再び下部に位置した各対戦型ロボット10、20まで連結される。このように対戦型ロボット10、20と回転部材40の両端部42、43はそれぞれの電源線61、62で連結される。これによって回転部材40は各対戦型ロボット10、20が移動するに伴いその回転軸41を中心として回転することになり、両電源線61、62が互いに絡まることを防ぐようにする。
【0033】
本発明による回転部材40は、回転軸41を中心として回転するとき、電源部30から提供された両電源線61、62が回転軸41において互いに絡まることを防止するために、回転軸41の部分に第1線絡まり防止手段70を含む。即ち、第1線絡まり防止手段70は電源部30から回転部材40を通して両対戦型ロボット10、20に連結された両電源線61、62が、回転部材40の回転によって回転軸41で互いに絡まることを防ぐ。
【0034】
また、本発明による回転部材40は、回転軸41を中心として回転するとき、回転部材40の両端部42、43にそれぞれ第2線絡まり防止手段80、90をさらに含むこともできる。これは電源部30から回転部材40を通して両対戦型ロボット10、20に連結された両電源線61、62が、回転部材40の回転によって両端部42、43において互いに絡まったり両電源線61、62それぞれが自主的に絡まらないようにする。
【0035】
さらに、本発明では、選択的に各対戦型ロボット10、20にそれぞれ第3線絡まり防止手段(未図示)を備えることもできる。これは、回転部材40が回転軸41を中心として回転するとき、各対戦型ロボット10、20に提供された第3線絡まり防止手段(未図示)を用いて回転部材40の回転によって両端部42、43において両電源線61、62が互いに絡まったり両電源線61、62のそれぞれが自主的に絡まらないようにする。本発明において第2及び第3線絡まり防止手段は両方或いはいずれか一つのみ備えることができる。このような第1乃至第3線絡まり防止手段については下記においてより詳しく説明する。
【0036】
一方、上述のように本発明の他の実施例では、対戦型ロボットシステムが各対戦型ロボット10、20に有無線で制御信号を提供してロボット10、20を制御するコントローラ部50をさらに含むことができる。このようなコントローラ部50は有線または無線で各対戦型ロボット10、20を調整することができる。この際、有線で調整する場合、電源線61、62を通して電源供給及び制御信号を共に提供することができる。即ち、一つの電源線(61または62)を用いて電源及び制御信号を提供することができる。また、本発明の他の実施例では、電源部30とコントローラ部50を一つのユニットで具現することもできる。
【0037】
図2は、本発明の一実施例による回転部材を上部から見た図面である。
【0038】
図2を参照すると、本発明による回転部材40は、中心部に第1線絡まり防止手段70が形成され、第1線絡まり防止手段70の内部を通して両電源線61、62が提供される。このような両電源線61、62は再び回転部材40の長さ方向に沿ってそれぞれ両端部42、43に進行して下部の各対戦型ロボット10、20にそれぞれ連結される。
【0039】
図面には正確に図示してはいないが、回転部材40の両端部42、43にはそれぞれ第2線絡まり防止手段80、90が形成されることもできる。上述のように、第2線絡まり防止手段80、90を形成しない場合には、各対戦型ロボット10、20に第3線絡まり防止手段(未図示)を選択的に形成することもできる。このような第1乃至第3線絡まり防止手段は同じ装置で具現されることが好ましい。
【0040】
このような第1乃至第3線絡まり防止手段は、回転部材40が回転軸41を中心として回転するとき両電源線61、62が互いに絡まらないようにする。即ち、各対戦型ロボット10、20と回転部材40は電源線61、62を通して連結されているため、対戦型ロボット10、20が互いに対決するために移動すると、回転部材40はこのような対戦型ロボット10、20の移動に対応して自然に回転するようになる。従って、このような回転部材40が回転することによって両電源線61、62が互いに絡まったりそれぞれが自主的に絡まったりしないようにする。
【0041】
ここで、本発明の電源線61、62のうち回転部材40の両端部42、43と対戦型ロボット10、20との間に連結された部分63、64は、その長さが可変するよう具現されることが好ましい。例えば、各電源線61、62のその部分63、64を螺線(spiral)のように具現し、対戦型ロボット10、20が移動することによってその長さが可変するようにすることができる。これは、対戦型ロボット10、20が互いに対決する途中において、回転部材40から遠く離れたある場所に移動する場合に回転部材40に無理をかけないようにするためである。
【0042】
図3は、本発明の一実施例による線絡まり防止手段の内部構造を表した断面図である。
【0043】
図3を参照すると、本発明の一実施例による線絡まり防止手段100は、大きく外部ハウジング110と内部回転体120を含んで構成される。内部回転体120は上述の回転部材40と連結される。この際、外部ハウジング110及び内部回転体120は円筒形で具現されることが好ましい。このような構造において内部回転体120は外部ハウジング110内に形成され、下部に前述の回転部材40と物理的に連結される。従って、回転部材40が回転することによって内部回転体120は回転軸を中心として360度に回転する構造を有する。即ち、外部ハウジング110と内部回転体120との間には上部ベアリング130及び下部ベアリング140が形成され、内部回転体120が外部ハウジング110内で回転するように具現される。また、外部ハウジング110の内部には内部回転体120と接触する接触部150、160が上部及び下部にそれぞれ存在する。このような接触部150、160は外部ハウジング110の内周面に沿って360度円形で形成される。
【0044】
外部ハウジング110には電源部30から提供された電源線61、62がそれぞれ挿入される。この際、このような各電源線61、62は外部ハウジング110と内部回転体120との間に形成された上部及び下部接触部150、160にそれぞれ電気的に連結される。即ち、両電源線61、62のいずれか一つは上部接触部150に、他の一つは下部接触部160に電気的に連結される。このような連結は内部回転体120が外部ハウジング110内で回転しても維持される。これを下記において図3(a)及び図3(b)を参照に、より具体的に説明する。
【0045】
図3(a)及び図3(b)は、回転部材40が回転することによって内部回転体120が外部ハウジング110内で互いに90度回転した状態を図示している。先ず、図3(a)を参照すると、両電源線61、62のうち第1電源線61は下部接触部160に電気的に連結されており、第2電源線62は上部接触部150に電気的に連結されている。図面には各電源線61、62が3つの小さい電気線からなると図示されているが、これは一例に過ぎず、少なくとも一つ以上の電気線からなることができる。このように、図3(a)では外部ハウジング110に挿入された各電源線61、62が上部及び下部接触部150、160を通して内部回転体120の電源線61、62に電気的に連結され、この電源線61、62は続いて回転部材40に沿って両端部42、43を通して各対戦型ロボット10、20まで連結される。
【0046】
次に、図3(b)は図3(a)において回転部材40が180度回転することによって内部回転体120も180度だけ回転した状態を図示している。図3(b)を参照すると、内部回転体120が回転しても両電源線61、62のうち第1電源線61は下部接触部160に電気的に連結され続けており、第2電源線62は上部接触部150に電気的に連結され続けている。
【0047】
従って、図3(a)及び図3(b)に図示されたとおり、回転部材40が回転して内部回転体120が回転しても、電源線61、62は各接触部150、160に電気的に連結された状態を維持する。これによって回転部材40の回転にもかかわらず両電源線61、62は互いに絡まらなくなる。
【0048】
このような線絡まり防止手段は、回転部材40の回転軸41と両端部42、43、或いは各対戦型ロボット10、20に選択的に設けられることができ、本発明では回転部材40の回転軸41に設けられ、両端部42、43または対戦型ロボット10、20のいずれか一方に設けられることが好ましい。この際、対戦型ロボット10、20に設けられた場合、連結された電源線との接触を最小化するためロボットのヘッドに設けられることがより好ましい。
【0049】
本発明において回転部材40の回転軸41にシャフト(未図示)が形成されることもできる。これは、シャフトを回転軸とすることにより、より安定した構造が形成できるようにするためである。また、各電源線61、62に複数の電気線を形成して、電源だけでなくロボットの制御信号も共に提供することができる。このようなロボットの制御信号は有線でロボットを制御する信号である。従って、一つの電源線(61または62)で電源と制御信号を共に提供することができる。例えば、電力線通信(PLC:Power Line Communication)を用いることにより、電源を供給するための電力線を伝送媒体としてロボット制御信号のデータを伝送することができる。
【0050】
図4は、本発明の一実施例による対戦型ロボットの腕動作を示した概略図である。
【0051】
図4を参照すると、本発明の対戦型ロボットシステムでは、有線で対戦型ロボット10、20に供給するため、ロボット10、20の移動だけでなくロボット10、20の動作時にもロボット10、20がそれぞれの電源線61、62に接触しないようにすることが重要である。このために対戦型ロボット10、20は自分に連結された電源線61、62に接触しないように腕を動作するよう設定されることが好ましい。
【0052】
図面に図示されたとおり、一般に3軸腕構造を有するヒューマノイドロボットの場合、2つの形態の腕結合構造を有する。これを具体的にみると、その一つは図4(a)のようなウォーキング型(walking type)の腕構造であり、他の一つは図4(b)のようなダンシング型(dancing type)の腕構造である。ところが、図4(b)ではロボットの腕が胸の方に曲がるため連結された電源線と接触する確率が高い。しかし、図4(a)ではロボット10、20の腕が胸の方に曲がらないため電源線61、62との接触を最小化することができる。
【0053】
上述のように、本発明では、各対戦型ロボット10、20は自分に連結された電源線61、62に接触しないように腕を動作するよう設定される。
【0054】
一方、上述の本発明は単なる好ましい実施例であり、本発明のこのような実施例の記載内容に限られるものではない。即ち、上述の本願の技術思想の範囲内で様々な改良及び改造が可能であり、これらが添付の特許請求範囲に属するものであれば、いかなるものも本発明の技術的範囲に該当するということは自明である。
【産業上の利用可能性】
【0055】
最近、無線ロボットを教育やエンターテインメント分野に適用するという動きが活発になっている。特に、ロボットをスポーツに応用するという試みが続いているということを考えると、試合中にロボットに電源を有線で安定して供給すると同時に、試合中に電源線が互いに絡まらないようにすることが重要な要素になりつつある。
【0056】
このような面から見ると、本発明は電源線を用いてロボットに電源を安定して供給しながら、その電源線がロボットの移動時に互いに絡まらないようにすることにより、対戦型ロボットに非常に適することは自明である。
【0057】
さらに、本発明の技術的思想範囲内で電源線が絡まることを防止するため様々な実施例が具現可能であり、今後ロボットを用いたゲーム産業分野に非常に有用であると予想される。
【符号の説明】
【0058】
10、20 対戦型ロボット
30 電源部
40 回転部材
50 コントローラ部
61、62 電源線
70、80、90 第1〜第3線絡まり防止手段
110 外部ハウジング
120 内部回転体
130、140 ベアリング
150、160 上部及び下部接触部
【特許請求の範囲】
【請求項1】
有線で電源が提供され互いに対戦する二つの対戦型ロボットと、
前記各対戦型ロボットに電源を提供する電源部と、
前記両対戦型ロボットの上部または下部に位置して一定の長さを有し、ある一地点を回転軸として回転可能に具現された回転部材と、を含み、
前記電源部はそれぞれの電源線を通して有線で電源を前記各対戦型ロボットに提供し、前記各電源線は前記電源部から出発して前記回転部材の回転軸から長さ方向に沿って両端部にそれぞれ形成され前記両端部から前記各対戦型ロボットまでつながり、前記回転部材は前記各対戦型ロボットの移動に伴い前記回転軸を中心として回転することにより、前記両電源線が互いに絡まることを防ぐようにしたことを特徴とする対戦型ロボットシステム。
【請求項2】
前記回転部材は、回転時に前記電源部から提供された前記両電源線が前記回転軸において互いに絡まることを防止するため、前記回転軸部分に第1線絡まり防止手段を含むことを特徴とする請求項1に記載の対戦型ロボットシステム。
【請求項3】
前記回転部材は、回転時に前記両対戦型ロボットに連結された前記両電源線が互いに絡まったり前記両電源線それぞれが自主的に絡まることを防止するため、前記回転部材の両端部に第2線絡まり防止手段を含むことを特徴とする請求項1または2に記載の対戦型ロボットシステム。
【請求項4】
前記回転部材の回転時に前記両対戦型ロボットに連結された両電源線が互いに絡まったり前記両電源線それぞれが自主的に絡まることを防止するため、前記両ロボットの上部に第3線絡まり防止手段が形成されたことを特徴とする請求項1または2に記載の対戦型ロボットシステム。
【請求項5】
前記回転部材は、一定の長さを有する円筒形で具現され、前記電源線が前記円筒形の内部に形成されたことを特徴とする請求項1に記載の対戦型ロボットシステム。
【請求項6】
前記回転部材の回転軸に連結されたシャフトをさらに含むことを特徴とする請求項1に記載の対戦型ロボットシステム。
【請求項7】
前記回転部材の両端部と前記各対戦型ロボットとの間の各電源線は、前記対戦型ロボットの移動に自由に対応するため、長さが可変するよう具現されたことを特徴とする請求項1に記載の対戦型ロボットシステム。
【請求項8】
前記各電源線は、螺線(spiral)形状に具現されて長さが可変することを特徴とする請求項7に記載の対戦型ロボットシステム。
【請求項9】
前記各対戦型ロボットに有無線で制御信号を提供して前記ロボットを制御するコントローラ部をさらに含むことを特徴とする請求項1に記載の対戦型ロボットシステム。
【請求項10】
前記一つの電源線で電源と制御信号を提供することを特徴とする請求項9に記載の対戦型ロボットシステム。
【請求項11】
前記電源は、交流電源(AC)であり、前記交流電源に電力線通信(PLC)を用いて前記制御信号を前記ロボットに提供することを特徴とする請求項9に記載の対戦型ロボットシステム。
【請求項12】
前記対戦型ロボットは、自分に連結された電源線に接触しないように腕を動作するよう設定されたことを特徴とする請求項1に記載の対戦型ロボットシステム。
【請求項1】
有線で電源が提供され互いに対戦する二つの対戦型ロボットと、
前記各対戦型ロボットに電源を提供する電源部と、
前記両対戦型ロボットの上部または下部に位置して一定の長さを有し、ある一地点を回転軸として回転可能に具現された回転部材と、を含み、
前記電源部はそれぞれの電源線を通して有線で電源を前記各対戦型ロボットに提供し、前記各電源線は前記電源部から出発して前記回転部材の回転軸から長さ方向に沿って両端部にそれぞれ形成され前記両端部から前記各対戦型ロボットまでつながり、前記回転部材は前記各対戦型ロボットの移動に伴い前記回転軸を中心として回転することにより、前記両電源線が互いに絡まることを防ぐようにしたことを特徴とする対戦型ロボットシステム。
【請求項2】
前記回転部材は、回転時に前記電源部から提供された前記両電源線が前記回転軸において互いに絡まることを防止するため、前記回転軸部分に第1線絡まり防止手段を含むことを特徴とする請求項1に記載の対戦型ロボットシステム。
【請求項3】
前記回転部材は、回転時に前記両対戦型ロボットに連結された前記両電源線が互いに絡まったり前記両電源線それぞれが自主的に絡まることを防止するため、前記回転部材の両端部に第2線絡まり防止手段を含むことを特徴とする請求項1または2に記載の対戦型ロボットシステム。
【請求項4】
前記回転部材の回転時に前記両対戦型ロボットに連結された両電源線が互いに絡まったり前記両電源線それぞれが自主的に絡まることを防止するため、前記両ロボットの上部に第3線絡まり防止手段が形成されたことを特徴とする請求項1または2に記載の対戦型ロボットシステム。
【請求項5】
前記回転部材は、一定の長さを有する円筒形で具現され、前記電源線が前記円筒形の内部に形成されたことを特徴とする請求項1に記載の対戦型ロボットシステム。
【請求項6】
前記回転部材の回転軸に連結されたシャフトをさらに含むことを特徴とする請求項1に記載の対戦型ロボットシステム。
【請求項7】
前記回転部材の両端部と前記各対戦型ロボットとの間の各電源線は、前記対戦型ロボットの移動に自由に対応するため、長さが可変するよう具現されたことを特徴とする請求項1に記載の対戦型ロボットシステム。
【請求項8】
前記各電源線は、螺線(spiral)形状に具現されて長さが可変することを特徴とする請求項7に記載の対戦型ロボットシステム。
【請求項9】
前記各対戦型ロボットに有無線で制御信号を提供して前記ロボットを制御するコントローラ部をさらに含むことを特徴とする請求項1に記載の対戦型ロボットシステム。
【請求項10】
前記一つの電源線で電源と制御信号を提供することを特徴とする請求項9に記載の対戦型ロボットシステム。
【請求項11】
前記電源は、交流電源(AC)であり、前記交流電源に電力線通信(PLC)を用いて前記制御信号を前記ロボットに提供することを特徴とする請求項9に記載の対戦型ロボットシステム。
【請求項12】
前記対戦型ロボットは、自分に連結された電源線に接触しないように腕を動作するよう設定されたことを特徴とする請求項1に記載の対戦型ロボットシステム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−5231(P2011−5231A)
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願番号】特願2009−273813(P2009−273813)
【出願日】平成21年12月1日(2009.12.1)
【出願人】(509331711)ロボビルダー カンパニー リミテッド (1)
【氏名又は名称原語表記】ROBOBUILDER CO.,LTD
【住所又は居所原語表記】718−2,C zone,DMC Hi−tech Industry Center,Sangam−dong,Mapo−gu,Seoul,121−835,Republic of Korea
【Fターム(参考)】
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願日】平成21年12月1日(2009.12.1)
【出願人】(509331711)ロボビルダー カンパニー リミテッド (1)
【氏名又は名称原語表記】ROBOBUILDER CO.,LTD
【住所又は居所原語表記】718−2,C zone,DMC Hi−tech Industry Center,Sangam−dong,Mapo−gu,Seoul,121−835,Republic of Korea
【Fターム(参考)】
[ Back to top ]