
対話支援装置
【課題】ミラーニューロン欠損者が健常者と対話を行なう場合に、健常者のトランク動作(上半身を前方に倒してから戻す動作)に合わせて、ミラーニューロン欠損者がトランク動作を行なうことを支援するための対話支援装置を提供する。
【解決手段】対話中の一方の話者(ミラーニューロン欠損者)430を支援する対話支援装置は、話者(健常者)432のトランク動作を検出するセンサ116と、作用部310とを備え、作用部310は、センサ116が、上半身を前方に倒す話者432の動作を検出した場合、椅子に座った話者430の上半身を前方に移動させ、センサ116が、上半身を後方に反らす話者432の動作を検出した場合、椅子に座った話者430の上半身を後方に移動させる。これにより、ミラーニューロン欠損者は、適切なタイミングで、健常者のトランク動作に応じたトランク動作を行なうことができる。
【解決手段】対話中の一方の話者(ミラーニューロン欠損者)430を支援する対話支援装置は、話者(健常者)432のトランク動作を検出するセンサ116と、作用部310とを備え、作用部310は、センサ116が、上半身を前方に倒す話者432の動作を検出した場合、椅子に座った話者430の上半身を前方に移動させ、センサ116が、上半身を後方に反らす話者432の動作を検出した場合、椅子に座った話者430の上半身を後方に移動させる。これにより、ミラーニューロン欠損者は、適切なタイミングで、健常者のトランク動作に応じたトランク動作を行なうことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、対話を支援するための装置に関し、特に脳機能障害者による対話を支援するための対話支援装置に関する。
【背景技術】
【0002】
日本人話者が対面対話を行なうとき、頷きや相鎚等の首から上の動作が一般的に頻出することが知られている。さらに話が盛り上がった場合、又は、声が大きくなる場合等に、上半身を前のめりに倒してから戻す動作が表出することがある。これは体幹動作又はトランク動作と呼ばれる。話が盛り上がったときに、このトランク動作が二者間で無意図的に相互に行なわれることがある。このトランク動作から対話の盛り上がりの有無を判定する研究が行なわれている(下記非特許文献1及び2参照)。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】善本淳,水上悦雄,“話量積とトランク動作量積を用いた二者間同調性の検出”,電子情報通信学会総合大会論文集 2010年 基礎・境界,182,22010‐03‐02
【非特許文献2】善本淳,水上悦雄,“対話時の同調性を知る一手段としてのトランク動作解析”,情報処理学会全国大会講演論文集 第72回平成22年(2),“2‐63”‐“2‐64”,2010‐03‐08
【発明の概要】
【発明が解決しようとする課題】
【0004】
対話する両者が、脳の機能に問題がない者(以下、健常者という)であれば、上記のトランク動作が観測されるが、脳の機能に問題がある障害者には、トランク動作が観測されないことがある。例えば、脳において、相手の動作をまねることに関係するミラーニューロンが存在することが知られているが、このミラーニューロン欠損者の中には、この無意図的トランク動作を行なうことができない者がいる。そのために、一部のミラーニューロン欠損者等、筋肉収縮は意図的に行なえるものの、何らかの理由でトランク動作を行なわない者(以下、欠損者という)と健常者との対話は盛り上がらず、欠損者は、健常者からいわゆる「話しにくい人」と呼ばれる問題がある。
【0005】
また、視覚障害者は、相手のトランク動作を視認することができないので、適切なタイミグでトランク動作を行なうことができない場合がある。その場合、視覚障害者も、健常者に「話しにくい人」と思われる問題がある。
【0006】
したがって、本発明は、欠損者又は視覚障害者が健常者と対話を行なう場合に、健常者のトランク運動に合わせて、欠損者又は視覚障害者がトランク動作を行なうことを支援するための対話支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的は、下記によって達成することができる。
【0008】
即ち、本発明に係る対話支援装置は、対話中の一方の話者を支援する対話支援装置であって、他方の話者のトランク動作を検出する検出部と、検出部が、他方の話者のトランク動作を検出した場合に、一方の話者に力を加える作用部とを備え、トランク動作は、上半身を前方に倒してから戻す動作である。
【0009】
好ましくは、作用部は、椅子に装着され、椅子に座った一方の話者の上半身を前方に移動させる押出部を備え、押出部は、検出部が、他方の話者が上半身を前方に倒す動作を検出した場合に、一方の話者の上半身を前方に移動させる。
【0010】
より好ましくは、作用部は、椅子に装着され、椅子に座った一方の話者の上半身を後方に移動させる引戻部を備え、引戻部は、検出部が、他方の話者が上半身を後方に反らす動作を検出した場合に、一方の話者の上半身を後方に移動させる。
【0011】
さらに好ましくは、押出部は、気体又は液体を供給されて拡張する機構であり、椅子の背もたれと一方の話者の背中との間に配置され、引戻部は、気体又は液体を供給されて収縮する機構であり、椅子の背もたれと一方の話者の背中との間に配置される。
【0012】
好ましくは、検出部は、他方の話者を撮像して時系列の画像データを取得するイメージセンサを備え、検出部は、画像データ中の上半身領域を特定し、上半身領域の動きを検出することにより、トランク動作を検出する。
【0013】
より好ましくは、検出部は、ドップラーセンサをさらに備え、検出部は、他方の話者のトランク動作を検出した場合、ドップラーセンサによって、他方の話者が上半身を前方に倒す動作を行なったか、他方の話者が上半身を後方に反らす動作を行なったかを検出する。
【発明の効果】
【0014】
本発明によれば、対話相手である健常者のトランク動作を検出した結果に応じて、ミラーニューロン欠損者又は視覚障害者等に、適切なタイミングでトランク動作をさせることができる。
【0015】
対話相手である健常者のトランク動作が、上半身を前方に倒す動作であるか、又は、上半身を後方に反らす動作であるかを検出することによって、欠損者又は視覚障害者等に健常者と同じトランク動作をさせることができる。
【0016】
したがって、健常者は、欠損者又は視覚障害者等と、違和感なく自然な対話を行なうことができる。
【0017】
また、本発明によれば、欠損者又は視覚障害者等はトランク動作を効率的に学習することができる。
【0018】
また、本発明によれば、老人又は認知症者が話しかけを持続することができる対象(ダミー人形)を提供することができるので、老人又は認知症者の介護者の負担を軽減することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施の形態に係る対話支援装置の構成を示すブロック図である。
【図2】高圧空気を用いた可動機構部を示す側面図である。
【図3】作動部の構成を具体的に示す正面図である。
【図4】本発明の実施の形態に係る対話支援装置の動作を説明するための図である。
【図5】本発明の実施の形態に係る対話支援装置で実行されるプログラムの制御構造を示すフローチャートである。
【図6】人体の基準画像データを示す図である。
【図7】別の可動機構部の例を示す図である。
【図8】さらに別の可動機構部の例を示す図である。
【図9】膨張収縮部材を示す図である。
【図10】膨張収縮部材を用いた対話支援装置を示す図である。
【発明を実施するための形態】
【0020】
以下の実施の形態では、同一の部品には同一の参照番号を付してある。それらの名称及び機能も同一である。したがって、それらについての詳細な説明は繰返さない。
【0021】
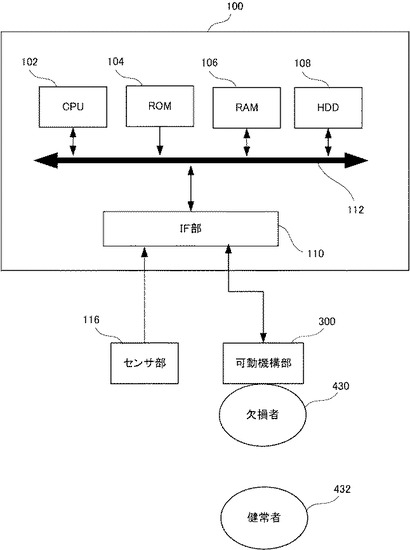
図1を参照して、本発明の実施の形態に係る対話支援装置は、制御部100、センサ部116、及び可動機構部300を備えている。制御部100は、演算処理部(以下、CPUという)102、読出専用メモリ(以下、ROMという)104、書換可能メモリ(以下、RAMという)106、ハードディスクドライブ(以下、HDDという)108、インターフェイス部(以下、IF部という)110、及びバス112を備えている。CPU102は、制御部100全体を制御する。ROM104は不揮発性の記憶装置であり、制御部100の動作を制御するためのプログラム及びデータが記憶されている。RAM106は、揮発性の記憶装置である。HDD108は、通電が遮断された場合にもデータを保持する不揮発性記憶装置であり、フラッシュメモリ等で代替されてもよい。
【0022】
IF部110は、CPU102とセンサ部116及び可動機構部300とのインターフェイスである。バス112には、CPU102、ROM104、RAM106、HDD108、及びIF部110が接続されている。各部間のデータ(制御情報を含む)交換は、バス112を介して行なわれる。
【0023】
CPU102は、バス112を介してROM104からプログラムをRAM106上に読出して、RAM106の一部を作業領域としてプログラムを実行する。CPU102は、プログラムにしたがって制御部100を構成する各部の制御を行なう。制御部100として、公知のコンピュータを使用することができる。
【0024】
IF部110は、センサ部116からの信号を受信し、受信した信号をCPU102に伝送する。IF部110は、センサ部116からの信号がアナログ信号であれば、受信した信号をデジタル信号に変換する機能(AD変換機能等)を有する。また、CPU102は、後述するように、IF部110を介して可動機構部300を制御する。
【0025】
センサ部116は、話者のトランク動作の検出に利用できるものであればよい。例えば、画像データを取得するためのイメージセンサを使用することができる。また、音波(例えば超音波)又は電磁波(例えばマイクロ波)のドップラー効果を用いたドップラーセンサを使用することができる。さらに、検出精度が要求される場合には、複数のセンサを組合せて使用してもよい。
【0026】
本発明の実施の形態に係る対話支援装置は、対話している2者のうち、一方の者(例えばミラーニューロン欠損者)を支援する装置である。図1には、欠損者430及び健常者432を示している。センサ部116は、健常者432のトランク動作を検出し、検出信号を制御部100に伝送する。制御部100のCPU102は、センサ部116から受信した信号に応じて可動機構部300を制御し、欠損者430に対して、対話を支援する働きかけを行なう。
【0027】
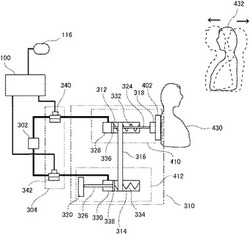
図2を参照して、可動機構部300は椅子400に装着されて使用される。可動機構部300は、高圧空気源302、駆動部304、第1通気管306、第2通気管308、押出シリンダ312、引戻シリンダ314、シリンダ固定部材316、作用部材318、及び、これらを椅子400に装着するための支持部材320を備えている。以下、押出シリンダ312、引戻シリンダ314、シリンダ固定部材316、及び作用部材318を、作動部310という。欠損者430は、可動機構部300が装着された椅子400に座り、健常者432と対話中に本対話支援装置による支援を受ける。
【0028】
図2において、駆動部304は、制御用ケーブル120を介して制御部100(より正確にはIF部110)に電気的に接続されている。センサ部116は、センサ用ケーブル118を介して制御部100に電気的に接続されている。センサ部116は、検出対象(健常者432)の動きを検出できるように、椅子400又は支持部材320に固定されている。
【0029】
高圧空気源302は、第1通気管306を介して、高圧空気を駆動部304に供給する。高圧空気源302には、例えばエアコンプレッサ、又は、高圧空気を予め封入しておいたボンベ等を用いる。
【0030】
駆動部304は、高圧空気源302から供給される高圧空気を、第2通気管308を介して作動部310の押出シリンダ312及び引戻シリンダ314に供給する。このとき、駆動部304は、制御部100のCPU102の制御を受けて、高圧空気源302から供給される高圧空気の作動部310への供給を開始又は停止する。
【0031】
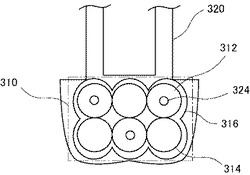
図3を参照して、作動部310を構成する押出シリンダ312及び引戻シリンダ314は、それぞれ3つ、合計6つ装備されている。なお、図3では、主として作動部310を示し、支持部材320は一部のみを示し、それ以外の構成要素は図示していない。
【0032】
作動部310において、上段には、中央の引戻シリンダ314を挟んで、左右に2つの押出シリンダ312が配置され、下段には、中央の押出シリンダ312を挟んで、左右に2つの引戻シリンダ314が配置されている。3つの引戻シリンダ314は支持部材320に固定されている。3つの押出シリンダ312は、1つの作用部材318に固定されている。全ての押出シリンダ312及び引戻シリンダ314は、硬質の部材であるシリンダ固定部材316によって相互に固定されている。したがって、3つの押出シリンダ312は、シリンダ固定部材316及び引戻シリンダ314を介して、支持部材320に固定されている。
【0033】
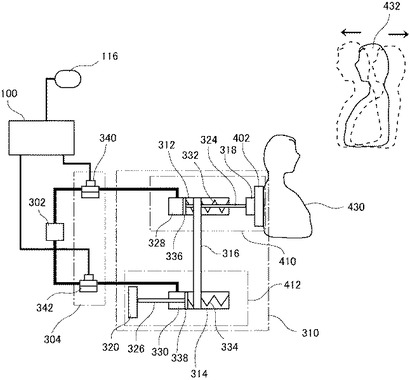
押出シリンダ312及び引戻シリンダ314として、バネシリンダを使用した場合の構成を図4に示す。押出シリンダ312は、ロッド324、バネ332、及び加圧室328を備えている。引戻シリンダ314も同様に、ロッド326、バネ334、及び加圧室330を備えている。作動部310は、押出機構部410及び引戻機構部412に区分される。押出機構部410は、押出シリンダ312、作用部材318及びクッション402から構成されている。引戻機構部412は、引戻シリンダ314及び支持部材320から構成されている。
【0034】
電磁弁340、342は、例えば3ポートの通常閉の電磁弁である。電磁弁340、342は、駆動部304を構成し、制御部100からの制御信号によって開閉する。これによって、電磁弁340、342は、それぞれ押出シリンダ312及び引戻シリンダ314への高圧空気の供給を制御する。
【0035】
電磁弁340が開くと、高圧空気源302からの高圧空気が、押出シリンダ312の加圧室328に供給される。これによって、押出シリンダ312内の可動隔壁336が、バネ332の抗力を受けながら移動してロッド324を押出し、ロッド324に固定された作用部材318がクッション402を介して欠損者430の背中を押し、欠損者430の上半身は前方に移動する(前のめりになる)。電磁弁340が閉ると、高圧空気源302からの高圧空気は遮断され、押出シリンダ312の加圧室328内の空気は排気され、バネ332の復元力によって、可動隔壁336、ロッド324、及び作用部材318は元の位置に戻り、欠損者430の上半身も元の位置に戻る。
【0036】
電磁弁342が開くと、高圧空気源302からの高圧空気が、引戻シリンダ314の加圧室330に供給される。これによって、引戻シリンダ314内の可動隔壁338が、バネ334の抗力を受けながら移動してロッド326を引戻シリンダ314内に引込む。ロッド326は支持部材320に固定されているので、相対的に作動部310全体が椅子400に近づき、欠損者430の上半身は後方に移動する(後ろに反る)。電磁弁342が閉ると、高圧空気源302からの高圧空気は遮断され、引戻シリンダ314の加圧室330内の空気は排気され、バネ334の復元力によって、可動隔壁338、ロッド326、及び作動部310が元の位置に戻り、欠損者430の上半身も元の位置に戻る。
【0037】
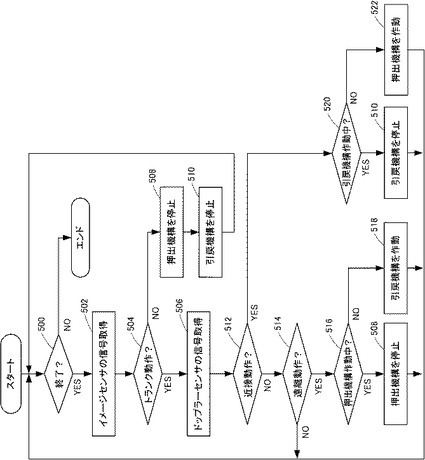
図5を参照して、本対話支援装置でCPU102が実行するプログラムの制御構造に関して説明する。ここでは、欠損者430が図2に示した椅子400に座り、クッション402にもたれて、対面する健常者432と対話を行なうこととする。また、センサ部116として、イメージセンサ(例えばWebカメラ)及びドップラーセンサを使用する。
【0038】
ステップ500において、CPU102は、終了の指示を受けたか否かを判定する。終了の指示を受けたと判定された場合、CPU102はプログラムを終了する。そうでなければ、制御はステップ502に移行する。終了の指示は、例えば、制御部100の電源スイッチのオフ、制御部100に装備された操作部に対する操作等によって行なわれる。
【0039】
ステップ502において、CPU102は、イメージセンサからの信号を所定の期間受信して、RAM106又はHDD108に時系列データの動画データとして記憶する。
【0040】
ステップ504において、CPU102は、記憶した動画データを解析してトランク動作が発生したか否かを判定する。トランク動作が発生したと判定された場合、制御はステップ506に移行する。そうでなければ、制御はステップ508に移行する。イメージセンサを用いたトランク動作の検出方法のうち、非特許文献1及び2等により公知である方法については概要のみ説明する。
【0041】
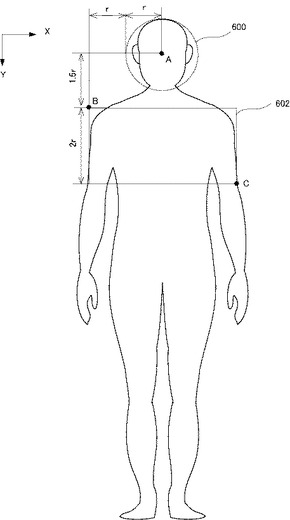
CPU102は、記憶した動画データを読出し、先頭フレームの画像において健常者432の顔領域を検出し、顔の中心位置、及び顔の大きさを決定する。CPU102は、これらの値を用いて、画像中の上半身領域を決定する。例えば、一般的な人の体つきと姿勢とをテンプレート(基準画像データ)として、予め定めてHDD108に記憶しておけば、そのテンプレートを参照して、顔の位置及び大きさから、上半身の領域を特定することができる。例えば、図6のような基準画像データにおいて、顔領域に対応する円600の中心点A(x,y)及び半径r、並びに、上半身領域602を予め定めておく。図6の場合、上半身領域602の左上の点Bの座標は(x−2r,y+1.5r)、点Cの座標は(x+2r,y+3.5r)となる。
【0042】
イメージセンサから取得した画像データから求めた顔領域に対応する円が、図6の円600と重なるように、イメージセンサから取得した画像データを変換(平行移動、拡大又は縮小)すれば、イメージセンサから取得した画像データ上の、上半身領域602に対応する領域を決定することができる。画像データの変換は、円の中心が一致するように平行移動し、半径の比率に応じて、拡大又は縮小すればよい。
【0043】
CPU102は、イメージセンサから取得した先頭フレームの画像上の上半身領域が特定できれば、その後の時系列データについて、所定のフレーム間で、上半身領域における対応する各画素間の輝度変化(輝度値の差)を求め、それらの総和を計算する。得られた値が、所定の閾値より大きい場合(上半身領域における輝度変化が大きい場合)、上半身領域が前後に移動したと考えられるので、トランク動作が発生したと判定される。
【0044】
なお、トランク動作は1秒程度(長くても数秒程度)の動作であり、急激な動作ではないので、上半身領域の輝度変化の総和を求めるフレームは、隣接するフレームに限らず、2フレーム以上間を空けたフレームであってもよい。
【0045】
ステップ504においてトランク動作が発生していないと判定された場合、ステップ508において、CPU102は、押出機構の作動を停止する。具体的には、CPU102は、電磁弁340が閉状態になる制御信号を供給する。その後、ステップ510において、CPU102は、引戻機構の作動を停止する。具体的には、CPU102は、電磁弁342が閉状態になる制御信号を供給する。その後、制御はステップ500に戻る。
【0046】
トランク動作が発生したと判定された場合、ステップ506において、CPU102は、ドップラーセンサからの信号を取得してRAM106に記憶する。
【0047】
ステップ512において、ステップ506で取得したドップラーセンサからの信号を用いて、CPU102は、測定対象(健常者)が接近しているか否かを判定する(以下、接近する動作を近接動作ともいう)。接近していると判定された場合、制御はステップ514に移行する。そうでなければ、制御はステップ520に移行する。
【0048】
ドップラーセンサは、対象方向に向け、ある単一周波数(F1)の波を発し、対象から跳ね返ってきた波(F2)を受信し、送信周波数と受信周波数との変化を検出して、変化の正負に応じて、所定の信号(例えば、2つのレベルの信号)を出力する。例えば、F2>F1(対象がセンサ側に向かって移動している)の場合、正の信号を出力し、F2<F1(対象がセンサ側から離れるように移動している)の場合、負の信号を出力する。したがって、CPU102は、RAM106に記憶したドップラーセンサからの信号の正負を判定することによって、健常者432が接近しているか、遠ざかっているかを判定することができる。
【0049】
ステップ514において、ステップ506で取得したドップラーセンサからの信号を用いて、CPU102は、測定対象(健常者)が遠ざかっているか否かを判定する(以下、遠ざかる動作を遠離動作ともいう)。遠ざかっていると判定された場合、制御はステップ516に移行する。そうでなければ、制御はステップ500に戻る。即ち、イメージセンサによってトランク動作が検出された場合でも、ドップラーセンサによってトランク動作が検出されなければ、駆動部304を作動させない。この二段階評価によって、判断ミスが少なくなる。
【0050】
ステップ516において、CPU102は、押出機構が作動中であるか否かを判定する。具体的には、CPU102は、電磁弁340を開状態にする制御信号を供給中であるか否かを判定する。押出機構が作動中であると判定された場合、制御はステップ508に移行する。そうでなければ、制御はステップ518に移行する。
【0051】
ステップ508において、上記したようにCPU102は、押出機構の作動を停止する。その後、制御はステップ500に戻る。
【0052】
ステップ518において、CPU102は、引戻機構を作動させる。具体的には、CPU102は、電磁弁342を開状態にする制御信号を出力する。これによって、電磁弁342が開き、引戻シリンダ314に高圧空気が供給される。そして、図4を参照して上記したように、ロッド326がシリンダ内に引込まれ、作動部310全体が椅子400に近づき、欠損者430の上半身は後方に移動する(後ろに反る)。その後、制御はステップ500に戻る。
【0053】
ステップ520において、CPU102は、引戻機構が作動中であるか否かを判定する。具体的には、CPU102は、電磁弁342を開状態にする制御信号を供給中であるか否かを判定する。引戻機構が作動中であると判定された場合、制御はステップ510に移行する。そうでなければ、制御はステップ522に移行する。
【0054】
ステップ510において、上記したようにCPU102は、引戻機構の作動を停止する。その後、制御はステップ500に戻る。
【0055】
ステップ522において、CPU102は、押出機構を作動させる。具体的には、CPU102は、電磁弁340を開状態にする制御信号を出力する。これによって、電磁弁340が開き、押出シリンダ312に高圧空気が供給される。そして、図4を参照して上記したように、ロッド324が押出されて、作用部材318がクッション402を介して欠損者430の背中を押し、欠損者430の上半身は前に移動する(前のめりになる)。その後、制御はステップ500に戻る。
【0056】
制御がステップ500に戻った後、終了と判定されるまで、ステップ500〜ステップ522の処理が繰返される。
【0057】
以上により、対話相手である健常者432のトランク動作、及び、トランク動作が近接動作であるか、又は遠離動作であるかを検出し、検出結果に応じて、欠損者430に、健常者432と同じトランク動作をさせることができる。したがって、欠損者430は、違和感なく自然に対話できている印象を、健常者432に与えることができる。予め、欠損者430に作動部310の動作の意味を説明しておけば、欠損者430自らも作動部310の動きに合わせて、上半身を動かすことができるので、より自然な対話を行なうことができる。また、本対話支援装置を用いて訓練を繰返すことで、欠損者430は、トランク動作を効率的に学習することができる。
【0058】
上記では、イメージセンサとドップラーセンサとを組合せて使用する場合を説明した。これは、ドップラーセンサのみを使用した場合、上半身の動作と手の動作とを判別することが難しく、イメージセンサのみを使用して、真正面から対面話者を撮像した場合には、近接動作であるか遠離動作であるかを判定することが難しい場合があるからである。しかし、イメージセンサ及びドップラーセンサを使用する場合に限定されない。トランク動作を検出することができればよい場合には、イメージセンサ及びドップラーセンサの何れか一方のみを使用してもよい。
【0059】
また、イメージセンサのみを用いて、トランク動作時の上半身の前後動作を判定してもよい。例えば、撮像された画像中の顔領域を検出し、その大きさ(例えば、顔領域の外接円の直径)の時間変化を求めることによって、前後動作を判定することができる。検出された顔領域の大きさが、大きくなるように変化していれば、イメージセンサに近づく動作(近接動作)であり、小さくなるように変化していれば、イメージセンサから遠ざかる動作(遠離動作)であると判定することができる。
【0060】
また、センサ部として、2つのカメラ(イメージセンサ)を用いて、取得した2枚の画像データをステレオ処理して、観測対象者の近接動作及び遠離動作を判定してもよい。また、2つのカメラから得られる動画データをそれぞれ処理して、顔の中心位置の移動方向から、観測対象者の近接動作及び遠離動作を判定してもよい。例えば、欠損者の左側に配置されたカメラで撮像した画像において対話相手(健常者)の顔の中心が右方向に移動し、同時に、右側に配置されたカメラで撮像した画像において対話相手(健常者)の顔の中心が左方向に移動していれば、近接動作と判定することができる。また、欠損者の左側に配置されたカメラで撮像した画像において対話相手(健常者)の顔の中心が左方向に移動し、同時に、右側に配置されたカメラで撮像した画像において対話相手(健常者)の顔の中心が右方向に移動していれば、遠離動作と判定することができる。
【0061】
また、1台のカメラを、対話相手(健常者)の側面を撮像する位置に配置して、トランク動作を検出してもよい。例えば、連続する3フレームの画像P1〜P3において、P1及びP2間の輝度変化が起こったピクセルの重心位置、及び、P2及びP3間の輝度変化が起こったピクセルの重心位置を求める。さらに、得られた2つの重心位置の変化、即ち移動ベクトルを求める。これによって、動作方向を得ることができる。得られた移動ベクトルが水平方向となす角度が、±20度以内(前方又は後方)であれば、トランク動作が発生したと判定することができる。前方であれば近接動作、後方であれば遠離動作と判定することができる。この方法であれば、ノイズとなる動作を除外することができる。例えば、対話相手(健常者)が、髪に手を触れて戻すような、手の上下動があったとしても、その動作方向は、水平に対して±20度よりも大きいのでトランク動作とは判定されない。
【0062】
また、図5に示したフローチャートは種々変更して実施され得る。例えば、ドップラーセンサで動きを検出する処理を行ない、動きが検出された後に、イメージセンサのデータを用いてトランク動作であるか否かを判定してもよい。また、これらの処理を並行して行ってもよい。
【0063】
また、上記では、トランク動作の近接動作又は遠離動作を判定した後、直ちに電磁弁を制御する場合を説明したが、これに限定されない。トランク動作の近接動作又は遠離動作が判定されてから、さらに所定の遅延時間Tdの後に、電磁弁を制御してもよい。これによって、欠損者の動作に、反応潜時(視覚による認知に要する時間、及び筋肉を稼働させて動作を発現させるのに要する時間)を導入することができ、欠損者の動作がより自然になる。センサ部からの信号を取得してからトランク動作の近接動作又は遠離動作の判定に要する処理時間Tcは、制御部の性能によって異なるので、処理時間Tcと遅延時間Tdとの合計(Td+Tc)が、0.3〜1秒になるように、遅延時間Tdを設定することが好ましい。
【0064】
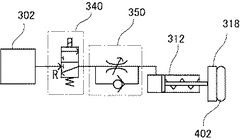
上記では、電磁弁の開閉によって、高圧空気源302からの高圧空気を、押出シリンダ312及び引戻シリンダ314に供給する場合を説明したが、押出及び引戻速度をスムーズにすることが好ましい。押出及び引戻速度を調節する機構を備える構成を、図7に示す。
【0065】
図7は、図4に示した押出機構部410に対応し、電磁弁340(符号Rは圧縮空気排出口を表す)と押出シリンダ312との間にスピードコントローラ350が配置されている。スピードコントローラ350は、押出シリンダ312に供給される高圧空気の供給速度を調節するためのニードルを備えている。ニードルを操作して、作用部材318の押出動作がスムーズになるように調節する。図7の機構の動作は、図4に示した押出機構部410の動作と同じであるので、説明を繰返さない。
【0066】
また、図4の引戻機構部412に関しても同様に、電磁弁342と引戻シリンダ314との間にスピードコントローラを配置することができる。同様に、ニードルを操作して、作動部310の支持部材320への接近動作がスムーズになるように調節する。動作は、図4に示した引戻機構部412の動作と同じであるので、説明を繰返さない。
【0067】
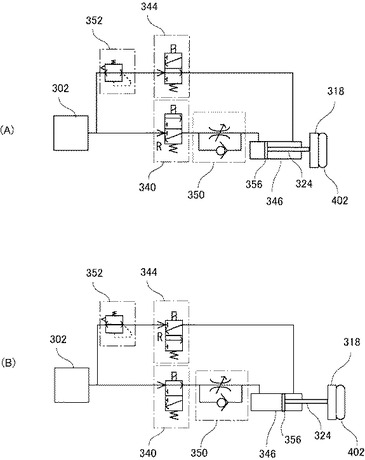
また、バネシリンダを使用せずに、押出機構部410及び引戻機構部412を構成してもよい。例えば、図8に示したように、バネシリンダを使用せず、空気圧で2方向に移動させる複動シリンダを使用することができる。図8に示した押出機構は、図4の機構と異なり、電磁弁344(符号Rは圧縮空気排出口を表す)、レギュレータ352、及びスピードコントローラ350を備えており、押出シリンダ312の代わりに、バネを使用しない複動シリンダ346を備えている。レギュレータ352は、電磁弁344側の圧力と、高圧空気源302側の圧力とを調節するためのものである。ここでは、レギュレータ352の右側の圧力は、左側(高圧空気源302側)の圧力よりも低く、且つ大気圧よりも高いように調節されている。電磁弁340は、通常開(非通電時開)の3ポート電磁弁である。電磁弁344は、通常閉(非通電時閉)の3ポート電磁弁である。
【0068】
図8の(A)は、電磁弁340及び344が通電されていない状態(電磁弁340は閉、電磁弁344は開)を示す。このとき、可動隔壁356の左側の空間は、スピードコントローラ350を介して電磁弁340によって開放されており、大気圧になっている。可動隔壁356の右側の空間は、電磁弁344を介して、レギュレータ352によって供給される圧力(大気圧よりも高圧)になっている。したがって、可動隔壁356は可動範囲の左側端に位置する。
【0069】
図8の(B)は、電磁弁340及び344が通電された状態(電磁弁340は開、電磁弁344は閉)を示す。このとき、可動隔壁356の左側の空間には、電磁弁340(開)を介して、高圧空気源302から、高圧空気が供給される。一方、可動隔壁356の右側の空間は、電磁弁344(閉)によって開放され、大気圧になる。したがって、圧力差によって、可動隔壁356は右に移動する。これによって、ロッドが押出され、作用部材318及びクッション402が右側に移動する。
【0070】
ロッドが押出された状態から、再度、電磁弁340及び344が通電されなくなれば、電磁弁340は閉、電磁弁344は開になり、上記と同様に、可動隔壁356の左側の空間の圧力は大気圧になり、右側の空間は、大気圧よりも高い圧力になる。したがって、可動隔壁356の左右の圧力差によって、可動隔壁356は左に移動し、元の位置に戻る。
【0071】
また、図2及び図3に示した押出シリンダ312及び引戻シリンダ314の配置、並びにそれらの数は上記に限定されない。作用部材318を一様に移動させ、椅子400に座った欠損者430の背中に一様に力を加えることができる数及び配置であればよい。また、シリンダの代わりに、エアバッグ等を用いてもよい。即ち、制御部の制御を受けて、拡大又は収縮可能なものであればよい。
【0072】
また、電磁弁は上記した3ポート電磁弁に限定されない。また、作動部310を作動させるために使用される気体は、空気以外のガスであってもよい。例えば、人体に無害な不燃性のガスを使用してもよい。また、気体に限らず液体を使用してもよい。例えば、油圧機構を用いてもよい。
【0073】
また、上記では、欠損者の背中を押す機能と、背中を引く(椅子に近づける)機能との両者を有する場合を説明したが、何れか一方の機能のみを有していてもよい。
【0074】
上記では、本対話支援装置は、欠損者の健常者との対話を支援する装置であり、欠損者がトランク動作を学習するためにも使用され得ることを説明したが、それ以外の用途にも使用可能である。例えば、本対話支援装置は、視覚障害者のトレーニング用として、さらには、視覚障害者が実際に対話するときの支援装置として使用することができる。本対話支援装置を使用することによって、視覚障害者は、対話相手のトランク動作に応じて、自分の体をトランク動作させることができる。また、視覚障害者は、背中から相手の動作を知ることが可能であるので、より多くの情報を得ることができる。
【0075】
また、本対話支援装置は、老人又は認知症者等の介護支援にも適用することができる。具体的には、本対話支援装置を装着した椅子にダミー人形を座らせて、老人又は認知症者の話し相手(聞き役)とすることができる。老人又は認知症者が話しかけても、人形が動かなければ、老人又は認知症者は、人形に対して話すことを止めてしまい、別の話し相手を探そうとする。これに対して、図2に示したように本対話支援装置が装着された椅子に人形を座らせた場合、老人又は認知症者が上半身を動かせば、人形も同様の動きをする。したがって、老人又は認知症者が、長い時間人形に話しかけつづけることが期待できる。それによって、介護者がつきっきりになる必要がなくなり、介護者の負担を軽減することができる。高度な人間型ロボット等は高価であるが、本対話支援装置であれば比較的安価に実現可能である点でも有効である。
【0076】
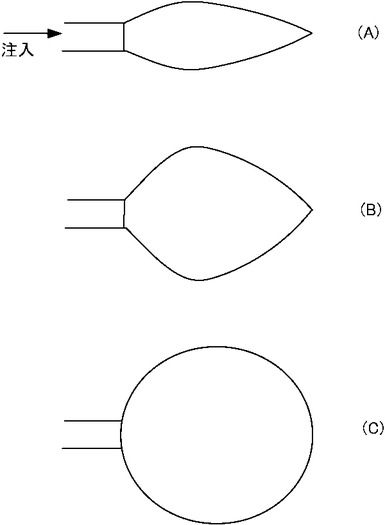
また、上記では、欠損者の背中に直接的に力を加える場合を説明したが、これに限定されない。欠損者に動作のタイミングを知らせるだけでもよい。その場合には、図2において作動部310の代わりに、ゴム風船のような、大気圧と圧縮空気の気圧差によって、膨張/収縮する物を使用することができる。例えば、図9に示した膨張収縮部材は、矢印で示した開口部から圧縮空気を注入又は排出することによって、(A)〜(C)で示したように膨張又は収縮する。
【0077】
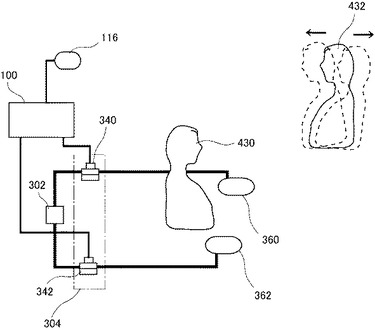
図10は、図2の押出機構部410及び引戻機構部412を、それぞれ膨張収縮部材360及び362で置き換えた構成である。センサ部116によって、健常者432のトランク動作、及び、トランク動作が近接動作であるか又は遠離動作であるかを検出した場合、検出結果に応じて、膨張収縮部材360及び362の何れかに高圧空気が供給される。高圧空気が供給された膨張収縮部材は膨張する。欠損者430は、膨張収縮部材360及び362をそれぞれ左右の手に持つ、又は、左右のポケットに入れておく。トランク動作が接近動作又は遠離動作である場合に、何れの膨張収縮部材が膨張するかを欠損者430が予め知らされていれば、欠損者430は、膨張収縮部材360及び362の何れが膨張したかによって、対話相手である健常者432のトランク動作と同様のトランク動作を、適切なタイミングで行なうことができる。なお、欠損者430が、健常者432の動作を見て、健常者432の動作が接近動作であるか、遠ざかる動作であるかを判定できる場合には、トランク動作であることを欠損者430に知らせることができればよいので、膨張収縮部材は1つでよく、膨張収縮部材を膨張させる機構(電磁弁)も1つでよい。その場合には、センサによってトランク動作が検出できればよく、接近する動作であるか又は遠ざかる動作まで検出できなくてもよい。
【0078】
また、対話相手のトランク動作が検出されたことを、欠損者に伝える器具は膨張収縮する部材に限定されない。気圧によって変形する密閉器具又は弾性アクチュエータで、通気管の端部を封じてもよい。また、通気管の端部に何も装着せずに、対話相手のトランク動作が検出されたときに、欠損者に空気を吹きつけてもよい。
【0079】
また、手首等に装着できる器具であってもよい。その場合、人に力を加える作用部は、皮膚に振動を与える装置、電極を皮膚に接触させて微弱な電気刺激を与える装置等であってもよい。
【0080】
また、本対話支援装置は、携帯型の装置であってもよい。その場合、センサ部は、眼鏡、衣服の胸ポケット、衣服の肩部分に装着すればよい。制御部からの電磁弁の制御は、ワイヤレス(無線、赤外線等)によって行なってもよい。
【0081】
以上、実施の形態を説明することにより本発明を説明したが、上記した実施の形態は例示であって、本発明は上記した実施の形態に限定されるものではなく、種々変更して実施することができる。
【符号の説明】
【0082】
100 制御部
102 CPU
104 ROM
106 RAM
108 HDD
110 インターフェイス部(IF部)
112 バス
116 センサ部
300 可動機構部
302 高圧空気源
304 駆動部
310 作動部
312 押出シリンダ
314 引戻シリンダ
316 シリンダ固定部材
318 作用部材
320 支持部材
【技術分野】
【0001】
本発明は、対話を支援するための装置に関し、特に脳機能障害者による対話を支援するための対話支援装置に関する。
【背景技術】
【0002】
日本人話者が対面対話を行なうとき、頷きや相鎚等の首から上の動作が一般的に頻出することが知られている。さらに話が盛り上がった場合、又は、声が大きくなる場合等に、上半身を前のめりに倒してから戻す動作が表出することがある。これは体幹動作又はトランク動作と呼ばれる。話が盛り上がったときに、このトランク動作が二者間で無意図的に相互に行なわれることがある。このトランク動作から対話の盛り上がりの有無を判定する研究が行なわれている(下記非特許文献1及び2参照)。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】善本淳,水上悦雄,“話量積とトランク動作量積を用いた二者間同調性の検出”,電子情報通信学会総合大会論文集 2010年 基礎・境界,182,22010‐03‐02
【非特許文献2】善本淳,水上悦雄,“対話時の同調性を知る一手段としてのトランク動作解析”,情報処理学会全国大会講演論文集 第72回平成22年(2),“2‐63”‐“2‐64”,2010‐03‐08
【発明の概要】
【発明が解決しようとする課題】
【0004】
対話する両者が、脳の機能に問題がない者(以下、健常者という)であれば、上記のトランク動作が観測されるが、脳の機能に問題がある障害者には、トランク動作が観測されないことがある。例えば、脳において、相手の動作をまねることに関係するミラーニューロンが存在することが知られているが、このミラーニューロン欠損者の中には、この無意図的トランク動作を行なうことができない者がいる。そのために、一部のミラーニューロン欠損者等、筋肉収縮は意図的に行なえるものの、何らかの理由でトランク動作を行なわない者(以下、欠損者という)と健常者との対話は盛り上がらず、欠損者は、健常者からいわゆる「話しにくい人」と呼ばれる問題がある。
【0005】
また、視覚障害者は、相手のトランク動作を視認することができないので、適切なタイミグでトランク動作を行なうことができない場合がある。その場合、視覚障害者も、健常者に「話しにくい人」と思われる問題がある。
【0006】
したがって、本発明は、欠損者又は視覚障害者が健常者と対話を行なう場合に、健常者のトランク運動に合わせて、欠損者又は視覚障害者がトランク動作を行なうことを支援するための対話支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的は、下記によって達成することができる。
【0008】
即ち、本発明に係る対話支援装置は、対話中の一方の話者を支援する対話支援装置であって、他方の話者のトランク動作を検出する検出部と、検出部が、他方の話者のトランク動作を検出した場合に、一方の話者に力を加える作用部とを備え、トランク動作は、上半身を前方に倒してから戻す動作である。
【0009】
好ましくは、作用部は、椅子に装着され、椅子に座った一方の話者の上半身を前方に移動させる押出部を備え、押出部は、検出部が、他方の話者が上半身を前方に倒す動作を検出した場合に、一方の話者の上半身を前方に移動させる。
【0010】
より好ましくは、作用部は、椅子に装着され、椅子に座った一方の話者の上半身を後方に移動させる引戻部を備え、引戻部は、検出部が、他方の話者が上半身を後方に反らす動作を検出した場合に、一方の話者の上半身を後方に移動させる。
【0011】
さらに好ましくは、押出部は、気体又は液体を供給されて拡張する機構であり、椅子の背もたれと一方の話者の背中との間に配置され、引戻部は、気体又は液体を供給されて収縮する機構であり、椅子の背もたれと一方の話者の背中との間に配置される。
【0012】
好ましくは、検出部は、他方の話者を撮像して時系列の画像データを取得するイメージセンサを備え、検出部は、画像データ中の上半身領域を特定し、上半身領域の動きを検出することにより、トランク動作を検出する。
【0013】
より好ましくは、検出部は、ドップラーセンサをさらに備え、検出部は、他方の話者のトランク動作を検出した場合、ドップラーセンサによって、他方の話者が上半身を前方に倒す動作を行なったか、他方の話者が上半身を後方に反らす動作を行なったかを検出する。
【発明の効果】
【0014】
本発明によれば、対話相手である健常者のトランク動作を検出した結果に応じて、ミラーニューロン欠損者又は視覚障害者等に、適切なタイミングでトランク動作をさせることができる。
【0015】
対話相手である健常者のトランク動作が、上半身を前方に倒す動作であるか、又は、上半身を後方に反らす動作であるかを検出することによって、欠損者又は視覚障害者等に健常者と同じトランク動作をさせることができる。
【0016】
したがって、健常者は、欠損者又は視覚障害者等と、違和感なく自然な対話を行なうことができる。
【0017】
また、本発明によれば、欠損者又は視覚障害者等はトランク動作を効率的に学習することができる。
【0018】
また、本発明によれば、老人又は認知症者が話しかけを持続することができる対象(ダミー人形)を提供することができるので、老人又は認知症者の介護者の負担を軽減することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施の形態に係る対話支援装置の構成を示すブロック図である。
【図2】高圧空気を用いた可動機構部を示す側面図である。
【図3】作動部の構成を具体的に示す正面図である。
【図4】本発明の実施の形態に係る対話支援装置の動作を説明するための図である。
【図5】本発明の実施の形態に係る対話支援装置で実行されるプログラムの制御構造を示すフローチャートである。
【図6】人体の基準画像データを示す図である。
【図7】別の可動機構部の例を示す図である。
【図8】さらに別の可動機構部の例を示す図である。
【図9】膨張収縮部材を示す図である。
【図10】膨張収縮部材を用いた対話支援装置を示す図である。
【発明を実施するための形態】
【0020】
以下の実施の形態では、同一の部品には同一の参照番号を付してある。それらの名称及び機能も同一である。したがって、それらについての詳細な説明は繰返さない。
【0021】
図1を参照して、本発明の実施の形態に係る対話支援装置は、制御部100、センサ部116、及び可動機構部300を備えている。制御部100は、演算処理部(以下、CPUという)102、読出専用メモリ(以下、ROMという)104、書換可能メモリ(以下、RAMという)106、ハードディスクドライブ(以下、HDDという)108、インターフェイス部(以下、IF部という)110、及びバス112を備えている。CPU102は、制御部100全体を制御する。ROM104は不揮発性の記憶装置であり、制御部100の動作を制御するためのプログラム及びデータが記憶されている。RAM106は、揮発性の記憶装置である。HDD108は、通電が遮断された場合にもデータを保持する不揮発性記憶装置であり、フラッシュメモリ等で代替されてもよい。
【0022】
IF部110は、CPU102とセンサ部116及び可動機構部300とのインターフェイスである。バス112には、CPU102、ROM104、RAM106、HDD108、及びIF部110が接続されている。各部間のデータ(制御情報を含む)交換は、バス112を介して行なわれる。
【0023】
CPU102は、バス112を介してROM104からプログラムをRAM106上に読出して、RAM106の一部を作業領域としてプログラムを実行する。CPU102は、プログラムにしたがって制御部100を構成する各部の制御を行なう。制御部100として、公知のコンピュータを使用することができる。
【0024】
IF部110は、センサ部116からの信号を受信し、受信した信号をCPU102に伝送する。IF部110は、センサ部116からの信号がアナログ信号であれば、受信した信号をデジタル信号に変換する機能(AD変換機能等)を有する。また、CPU102は、後述するように、IF部110を介して可動機構部300を制御する。
【0025】
センサ部116は、話者のトランク動作の検出に利用できるものであればよい。例えば、画像データを取得するためのイメージセンサを使用することができる。また、音波(例えば超音波)又は電磁波(例えばマイクロ波)のドップラー効果を用いたドップラーセンサを使用することができる。さらに、検出精度が要求される場合には、複数のセンサを組合せて使用してもよい。
【0026】
本発明の実施の形態に係る対話支援装置は、対話している2者のうち、一方の者(例えばミラーニューロン欠損者)を支援する装置である。図1には、欠損者430及び健常者432を示している。センサ部116は、健常者432のトランク動作を検出し、検出信号を制御部100に伝送する。制御部100のCPU102は、センサ部116から受信した信号に応じて可動機構部300を制御し、欠損者430に対して、対話を支援する働きかけを行なう。
【0027】
図2を参照して、可動機構部300は椅子400に装着されて使用される。可動機構部300は、高圧空気源302、駆動部304、第1通気管306、第2通気管308、押出シリンダ312、引戻シリンダ314、シリンダ固定部材316、作用部材318、及び、これらを椅子400に装着するための支持部材320を備えている。以下、押出シリンダ312、引戻シリンダ314、シリンダ固定部材316、及び作用部材318を、作動部310という。欠損者430は、可動機構部300が装着された椅子400に座り、健常者432と対話中に本対話支援装置による支援を受ける。
【0028】
図2において、駆動部304は、制御用ケーブル120を介して制御部100(より正確にはIF部110)に電気的に接続されている。センサ部116は、センサ用ケーブル118を介して制御部100に電気的に接続されている。センサ部116は、検出対象(健常者432)の動きを検出できるように、椅子400又は支持部材320に固定されている。
【0029】
高圧空気源302は、第1通気管306を介して、高圧空気を駆動部304に供給する。高圧空気源302には、例えばエアコンプレッサ、又は、高圧空気を予め封入しておいたボンベ等を用いる。
【0030】
駆動部304は、高圧空気源302から供給される高圧空気を、第2通気管308を介して作動部310の押出シリンダ312及び引戻シリンダ314に供給する。このとき、駆動部304は、制御部100のCPU102の制御を受けて、高圧空気源302から供給される高圧空気の作動部310への供給を開始又は停止する。
【0031】
図3を参照して、作動部310を構成する押出シリンダ312及び引戻シリンダ314は、それぞれ3つ、合計6つ装備されている。なお、図3では、主として作動部310を示し、支持部材320は一部のみを示し、それ以外の構成要素は図示していない。
【0032】
作動部310において、上段には、中央の引戻シリンダ314を挟んで、左右に2つの押出シリンダ312が配置され、下段には、中央の押出シリンダ312を挟んで、左右に2つの引戻シリンダ314が配置されている。3つの引戻シリンダ314は支持部材320に固定されている。3つの押出シリンダ312は、1つの作用部材318に固定されている。全ての押出シリンダ312及び引戻シリンダ314は、硬質の部材であるシリンダ固定部材316によって相互に固定されている。したがって、3つの押出シリンダ312は、シリンダ固定部材316及び引戻シリンダ314を介して、支持部材320に固定されている。
【0033】
押出シリンダ312及び引戻シリンダ314として、バネシリンダを使用した場合の構成を図4に示す。押出シリンダ312は、ロッド324、バネ332、及び加圧室328を備えている。引戻シリンダ314も同様に、ロッド326、バネ334、及び加圧室330を備えている。作動部310は、押出機構部410及び引戻機構部412に区分される。押出機構部410は、押出シリンダ312、作用部材318及びクッション402から構成されている。引戻機構部412は、引戻シリンダ314及び支持部材320から構成されている。
【0034】
電磁弁340、342は、例えば3ポートの通常閉の電磁弁である。電磁弁340、342は、駆動部304を構成し、制御部100からの制御信号によって開閉する。これによって、電磁弁340、342は、それぞれ押出シリンダ312及び引戻シリンダ314への高圧空気の供給を制御する。
【0035】
電磁弁340が開くと、高圧空気源302からの高圧空気が、押出シリンダ312の加圧室328に供給される。これによって、押出シリンダ312内の可動隔壁336が、バネ332の抗力を受けながら移動してロッド324を押出し、ロッド324に固定された作用部材318がクッション402を介して欠損者430の背中を押し、欠損者430の上半身は前方に移動する(前のめりになる)。電磁弁340が閉ると、高圧空気源302からの高圧空気は遮断され、押出シリンダ312の加圧室328内の空気は排気され、バネ332の復元力によって、可動隔壁336、ロッド324、及び作用部材318は元の位置に戻り、欠損者430の上半身も元の位置に戻る。
【0036】
電磁弁342が開くと、高圧空気源302からの高圧空気が、引戻シリンダ314の加圧室330に供給される。これによって、引戻シリンダ314内の可動隔壁338が、バネ334の抗力を受けながら移動してロッド326を引戻シリンダ314内に引込む。ロッド326は支持部材320に固定されているので、相対的に作動部310全体が椅子400に近づき、欠損者430の上半身は後方に移動する(後ろに反る)。電磁弁342が閉ると、高圧空気源302からの高圧空気は遮断され、引戻シリンダ314の加圧室330内の空気は排気され、バネ334の復元力によって、可動隔壁338、ロッド326、及び作動部310が元の位置に戻り、欠損者430の上半身も元の位置に戻る。
【0037】
図5を参照して、本対話支援装置でCPU102が実行するプログラムの制御構造に関して説明する。ここでは、欠損者430が図2に示した椅子400に座り、クッション402にもたれて、対面する健常者432と対話を行なうこととする。また、センサ部116として、イメージセンサ(例えばWebカメラ)及びドップラーセンサを使用する。
【0038】
ステップ500において、CPU102は、終了の指示を受けたか否かを判定する。終了の指示を受けたと判定された場合、CPU102はプログラムを終了する。そうでなければ、制御はステップ502に移行する。終了の指示は、例えば、制御部100の電源スイッチのオフ、制御部100に装備された操作部に対する操作等によって行なわれる。
【0039】
ステップ502において、CPU102は、イメージセンサからの信号を所定の期間受信して、RAM106又はHDD108に時系列データの動画データとして記憶する。
【0040】
ステップ504において、CPU102は、記憶した動画データを解析してトランク動作が発生したか否かを判定する。トランク動作が発生したと判定された場合、制御はステップ506に移行する。そうでなければ、制御はステップ508に移行する。イメージセンサを用いたトランク動作の検出方法のうち、非特許文献1及び2等により公知である方法については概要のみ説明する。
【0041】
CPU102は、記憶した動画データを読出し、先頭フレームの画像において健常者432の顔領域を検出し、顔の中心位置、及び顔の大きさを決定する。CPU102は、これらの値を用いて、画像中の上半身領域を決定する。例えば、一般的な人の体つきと姿勢とをテンプレート(基準画像データ)として、予め定めてHDD108に記憶しておけば、そのテンプレートを参照して、顔の位置及び大きさから、上半身の領域を特定することができる。例えば、図6のような基準画像データにおいて、顔領域に対応する円600の中心点A(x,y)及び半径r、並びに、上半身領域602を予め定めておく。図6の場合、上半身領域602の左上の点Bの座標は(x−2r,y+1.5r)、点Cの座標は(x+2r,y+3.5r)となる。
【0042】
イメージセンサから取得した画像データから求めた顔領域に対応する円が、図6の円600と重なるように、イメージセンサから取得した画像データを変換(平行移動、拡大又は縮小)すれば、イメージセンサから取得した画像データ上の、上半身領域602に対応する領域を決定することができる。画像データの変換は、円の中心が一致するように平行移動し、半径の比率に応じて、拡大又は縮小すればよい。
【0043】
CPU102は、イメージセンサから取得した先頭フレームの画像上の上半身領域が特定できれば、その後の時系列データについて、所定のフレーム間で、上半身領域における対応する各画素間の輝度変化(輝度値の差)を求め、それらの総和を計算する。得られた値が、所定の閾値より大きい場合(上半身領域における輝度変化が大きい場合)、上半身領域が前後に移動したと考えられるので、トランク動作が発生したと判定される。
【0044】
なお、トランク動作は1秒程度(長くても数秒程度)の動作であり、急激な動作ではないので、上半身領域の輝度変化の総和を求めるフレームは、隣接するフレームに限らず、2フレーム以上間を空けたフレームであってもよい。
【0045】
ステップ504においてトランク動作が発生していないと判定された場合、ステップ508において、CPU102は、押出機構の作動を停止する。具体的には、CPU102は、電磁弁340が閉状態になる制御信号を供給する。その後、ステップ510において、CPU102は、引戻機構の作動を停止する。具体的には、CPU102は、電磁弁342が閉状態になる制御信号を供給する。その後、制御はステップ500に戻る。
【0046】
トランク動作が発生したと判定された場合、ステップ506において、CPU102は、ドップラーセンサからの信号を取得してRAM106に記憶する。
【0047】
ステップ512において、ステップ506で取得したドップラーセンサからの信号を用いて、CPU102は、測定対象(健常者)が接近しているか否かを判定する(以下、接近する動作を近接動作ともいう)。接近していると判定された場合、制御はステップ514に移行する。そうでなければ、制御はステップ520に移行する。
【0048】
ドップラーセンサは、対象方向に向け、ある単一周波数(F1)の波を発し、対象から跳ね返ってきた波(F2)を受信し、送信周波数と受信周波数との変化を検出して、変化の正負に応じて、所定の信号(例えば、2つのレベルの信号)を出力する。例えば、F2>F1(対象がセンサ側に向かって移動している)の場合、正の信号を出力し、F2<F1(対象がセンサ側から離れるように移動している)の場合、負の信号を出力する。したがって、CPU102は、RAM106に記憶したドップラーセンサからの信号の正負を判定することによって、健常者432が接近しているか、遠ざかっているかを判定することができる。
【0049】
ステップ514において、ステップ506で取得したドップラーセンサからの信号を用いて、CPU102は、測定対象(健常者)が遠ざかっているか否かを判定する(以下、遠ざかる動作を遠離動作ともいう)。遠ざかっていると判定された場合、制御はステップ516に移行する。そうでなければ、制御はステップ500に戻る。即ち、イメージセンサによってトランク動作が検出された場合でも、ドップラーセンサによってトランク動作が検出されなければ、駆動部304を作動させない。この二段階評価によって、判断ミスが少なくなる。
【0050】
ステップ516において、CPU102は、押出機構が作動中であるか否かを判定する。具体的には、CPU102は、電磁弁340を開状態にする制御信号を供給中であるか否かを判定する。押出機構が作動中であると判定された場合、制御はステップ508に移行する。そうでなければ、制御はステップ518に移行する。
【0051】
ステップ508において、上記したようにCPU102は、押出機構の作動を停止する。その後、制御はステップ500に戻る。
【0052】
ステップ518において、CPU102は、引戻機構を作動させる。具体的には、CPU102は、電磁弁342を開状態にする制御信号を出力する。これによって、電磁弁342が開き、引戻シリンダ314に高圧空気が供給される。そして、図4を参照して上記したように、ロッド326がシリンダ内に引込まれ、作動部310全体が椅子400に近づき、欠損者430の上半身は後方に移動する(後ろに反る)。その後、制御はステップ500に戻る。
【0053】
ステップ520において、CPU102は、引戻機構が作動中であるか否かを判定する。具体的には、CPU102は、電磁弁342を開状態にする制御信号を供給中であるか否かを判定する。引戻機構が作動中であると判定された場合、制御はステップ510に移行する。そうでなければ、制御はステップ522に移行する。
【0054】
ステップ510において、上記したようにCPU102は、引戻機構の作動を停止する。その後、制御はステップ500に戻る。
【0055】
ステップ522において、CPU102は、押出機構を作動させる。具体的には、CPU102は、電磁弁340を開状態にする制御信号を出力する。これによって、電磁弁340が開き、押出シリンダ312に高圧空気が供給される。そして、図4を参照して上記したように、ロッド324が押出されて、作用部材318がクッション402を介して欠損者430の背中を押し、欠損者430の上半身は前に移動する(前のめりになる)。その後、制御はステップ500に戻る。
【0056】
制御がステップ500に戻った後、終了と判定されるまで、ステップ500〜ステップ522の処理が繰返される。
【0057】
以上により、対話相手である健常者432のトランク動作、及び、トランク動作が近接動作であるか、又は遠離動作であるかを検出し、検出結果に応じて、欠損者430に、健常者432と同じトランク動作をさせることができる。したがって、欠損者430は、違和感なく自然に対話できている印象を、健常者432に与えることができる。予め、欠損者430に作動部310の動作の意味を説明しておけば、欠損者430自らも作動部310の動きに合わせて、上半身を動かすことができるので、より自然な対話を行なうことができる。また、本対話支援装置を用いて訓練を繰返すことで、欠損者430は、トランク動作を効率的に学習することができる。
【0058】
上記では、イメージセンサとドップラーセンサとを組合せて使用する場合を説明した。これは、ドップラーセンサのみを使用した場合、上半身の動作と手の動作とを判別することが難しく、イメージセンサのみを使用して、真正面から対面話者を撮像した場合には、近接動作であるか遠離動作であるかを判定することが難しい場合があるからである。しかし、イメージセンサ及びドップラーセンサを使用する場合に限定されない。トランク動作を検出することができればよい場合には、イメージセンサ及びドップラーセンサの何れか一方のみを使用してもよい。
【0059】
また、イメージセンサのみを用いて、トランク動作時の上半身の前後動作を判定してもよい。例えば、撮像された画像中の顔領域を検出し、その大きさ(例えば、顔領域の外接円の直径)の時間変化を求めることによって、前後動作を判定することができる。検出された顔領域の大きさが、大きくなるように変化していれば、イメージセンサに近づく動作(近接動作)であり、小さくなるように変化していれば、イメージセンサから遠ざかる動作(遠離動作)であると判定することができる。
【0060】
また、センサ部として、2つのカメラ(イメージセンサ)を用いて、取得した2枚の画像データをステレオ処理して、観測対象者の近接動作及び遠離動作を判定してもよい。また、2つのカメラから得られる動画データをそれぞれ処理して、顔の中心位置の移動方向から、観測対象者の近接動作及び遠離動作を判定してもよい。例えば、欠損者の左側に配置されたカメラで撮像した画像において対話相手(健常者)の顔の中心が右方向に移動し、同時に、右側に配置されたカメラで撮像した画像において対話相手(健常者)の顔の中心が左方向に移動していれば、近接動作と判定することができる。また、欠損者の左側に配置されたカメラで撮像した画像において対話相手(健常者)の顔の中心が左方向に移動し、同時に、右側に配置されたカメラで撮像した画像において対話相手(健常者)の顔の中心が右方向に移動していれば、遠離動作と判定することができる。
【0061】
また、1台のカメラを、対話相手(健常者)の側面を撮像する位置に配置して、トランク動作を検出してもよい。例えば、連続する3フレームの画像P1〜P3において、P1及びP2間の輝度変化が起こったピクセルの重心位置、及び、P2及びP3間の輝度変化が起こったピクセルの重心位置を求める。さらに、得られた2つの重心位置の変化、即ち移動ベクトルを求める。これによって、動作方向を得ることができる。得られた移動ベクトルが水平方向となす角度が、±20度以内(前方又は後方)であれば、トランク動作が発生したと判定することができる。前方であれば近接動作、後方であれば遠離動作と判定することができる。この方法であれば、ノイズとなる動作を除外することができる。例えば、対話相手(健常者)が、髪に手を触れて戻すような、手の上下動があったとしても、その動作方向は、水平に対して±20度よりも大きいのでトランク動作とは判定されない。
【0062】
また、図5に示したフローチャートは種々変更して実施され得る。例えば、ドップラーセンサで動きを検出する処理を行ない、動きが検出された後に、イメージセンサのデータを用いてトランク動作であるか否かを判定してもよい。また、これらの処理を並行して行ってもよい。
【0063】
また、上記では、トランク動作の近接動作又は遠離動作を判定した後、直ちに電磁弁を制御する場合を説明したが、これに限定されない。トランク動作の近接動作又は遠離動作が判定されてから、さらに所定の遅延時間Tdの後に、電磁弁を制御してもよい。これによって、欠損者の動作に、反応潜時(視覚による認知に要する時間、及び筋肉を稼働させて動作を発現させるのに要する時間)を導入することができ、欠損者の動作がより自然になる。センサ部からの信号を取得してからトランク動作の近接動作又は遠離動作の判定に要する処理時間Tcは、制御部の性能によって異なるので、処理時間Tcと遅延時間Tdとの合計(Td+Tc)が、0.3〜1秒になるように、遅延時間Tdを設定することが好ましい。
【0064】
上記では、電磁弁の開閉によって、高圧空気源302からの高圧空気を、押出シリンダ312及び引戻シリンダ314に供給する場合を説明したが、押出及び引戻速度をスムーズにすることが好ましい。押出及び引戻速度を調節する機構を備える構成を、図7に示す。
【0065】
図7は、図4に示した押出機構部410に対応し、電磁弁340(符号Rは圧縮空気排出口を表す)と押出シリンダ312との間にスピードコントローラ350が配置されている。スピードコントローラ350は、押出シリンダ312に供給される高圧空気の供給速度を調節するためのニードルを備えている。ニードルを操作して、作用部材318の押出動作がスムーズになるように調節する。図7の機構の動作は、図4に示した押出機構部410の動作と同じであるので、説明を繰返さない。
【0066】
また、図4の引戻機構部412に関しても同様に、電磁弁342と引戻シリンダ314との間にスピードコントローラを配置することができる。同様に、ニードルを操作して、作動部310の支持部材320への接近動作がスムーズになるように調節する。動作は、図4に示した引戻機構部412の動作と同じであるので、説明を繰返さない。
【0067】
また、バネシリンダを使用せずに、押出機構部410及び引戻機構部412を構成してもよい。例えば、図8に示したように、バネシリンダを使用せず、空気圧で2方向に移動させる複動シリンダを使用することができる。図8に示した押出機構は、図4の機構と異なり、電磁弁344(符号Rは圧縮空気排出口を表す)、レギュレータ352、及びスピードコントローラ350を備えており、押出シリンダ312の代わりに、バネを使用しない複動シリンダ346を備えている。レギュレータ352は、電磁弁344側の圧力と、高圧空気源302側の圧力とを調節するためのものである。ここでは、レギュレータ352の右側の圧力は、左側(高圧空気源302側)の圧力よりも低く、且つ大気圧よりも高いように調節されている。電磁弁340は、通常開(非通電時開)の3ポート電磁弁である。電磁弁344は、通常閉(非通電時閉)の3ポート電磁弁である。
【0068】
図8の(A)は、電磁弁340及び344が通電されていない状態(電磁弁340は閉、電磁弁344は開)を示す。このとき、可動隔壁356の左側の空間は、スピードコントローラ350を介して電磁弁340によって開放されており、大気圧になっている。可動隔壁356の右側の空間は、電磁弁344を介して、レギュレータ352によって供給される圧力(大気圧よりも高圧)になっている。したがって、可動隔壁356は可動範囲の左側端に位置する。
【0069】
図8の(B)は、電磁弁340及び344が通電された状態(電磁弁340は開、電磁弁344は閉)を示す。このとき、可動隔壁356の左側の空間には、電磁弁340(開)を介して、高圧空気源302から、高圧空気が供給される。一方、可動隔壁356の右側の空間は、電磁弁344(閉)によって開放され、大気圧になる。したがって、圧力差によって、可動隔壁356は右に移動する。これによって、ロッドが押出され、作用部材318及びクッション402が右側に移動する。
【0070】
ロッドが押出された状態から、再度、電磁弁340及び344が通電されなくなれば、電磁弁340は閉、電磁弁344は開になり、上記と同様に、可動隔壁356の左側の空間の圧力は大気圧になり、右側の空間は、大気圧よりも高い圧力になる。したがって、可動隔壁356の左右の圧力差によって、可動隔壁356は左に移動し、元の位置に戻る。
【0071】
また、図2及び図3に示した押出シリンダ312及び引戻シリンダ314の配置、並びにそれらの数は上記に限定されない。作用部材318を一様に移動させ、椅子400に座った欠損者430の背中に一様に力を加えることができる数及び配置であればよい。また、シリンダの代わりに、エアバッグ等を用いてもよい。即ち、制御部の制御を受けて、拡大又は収縮可能なものであればよい。
【0072】
また、電磁弁は上記した3ポート電磁弁に限定されない。また、作動部310を作動させるために使用される気体は、空気以外のガスであってもよい。例えば、人体に無害な不燃性のガスを使用してもよい。また、気体に限らず液体を使用してもよい。例えば、油圧機構を用いてもよい。
【0073】
また、上記では、欠損者の背中を押す機能と、背中を引く(椅子に近づける)機能との両者を有する場合を説明したが、何れか一方の機能のみを有していてもよい。
【0074】
上記では、本対話支援装置は、欠損者の健常者との対話を支援する装置であり、欠損者がトランク動作を学習するためにも使用され得ることを説明したが、それ以外の用途にも使用可能である。例えば、本対話支援装置は、視覚障害者のトレーニング用として、さらには、視覚障害者が実際に対話するときの支援装置として使用することができる。本対話支援装置を使用することによって、視覚障害者は、対話相手のトランク動作に応じて、自分の体をトランク動作させることができる。また、視覚障害者は、背中から相手の動作を知ることが可能であるので、より多くの情報を得ることができる。
【0075】
また、本対話支援装置は、老人又は認知症者等の介護支援にも適用することができる。具体的には、本対話支援装置を装着した椅子にダミー人形を座らせて、老人又は認知症者の話し相手(聞き役)とすることができる。老人又は認知症者が話しかけても、人形が動かなければ、老人又は認知症者は、人形に対して話すことを止めてしまい、別の話し相手を探そうとする。これに対して、図2に示したように本対話支援装置が装着された椅子に人形を座らせた場合、老人又は認知症者が上半身を動かせば、人形も同様の動きをする。したがって、老人又は認知症者が、長い時間人形に話しかけつづけることが期待できる。それによって、介護者がつきっきりになる必要がなくなり、介護者の負担を軽減することができる。高度な人間型ロボット等は高価であるが、本対話支援装置であれば比較的安価に実現可能である点でも有効である。
【0076】
また、上記では、欠損者の背中に直接的に力を加える場合を説明したが、これに限定されない。欠損者に動作のタイミングを知らせるだけでもよい。その場合には、図2において作動部310の代わりに、ゴム風船のような、大気圧と圧縮空気の気圧差によって、膨張/収縮する物を使用することができる。例えば、図9に示した膨張収縮部材は、矢印で示した開口部から圧縮空気を注入又は排出することによって、(A)〜(C)で示したように膨張又は収縮する。
【0077】
図10は、図2の押出機構部410及び引戻機構部412を、それぞれ膨張収縮部材360及び362で置き換えた構成である。センサ部116によって、健常者432のトランク動作、及び、トランク動作が近接動作であるか又は遠離動作であるかを検出した場合、検出結果に応じて、膨張収縮部材360及び362の何れかに高圧空気が供給される。高圧空気が供給された膨張収縮部材は膨張する。欠損者430は、膨張収縮部材360及び362をそれぞれ左右の手に持つ、又は、左右のポケットに入れておく。トランク動作が接近動作又は遠離動作である場合に、何れの膨張収縮部材が膨張するかを欠損者430が予め知らされていれば、欠損者430は、膨張収縮部材360及び362の何れが膨張したかによって、対話相手である健常者432のトランク動作と同様のトランク動作を、適切なタイミングで行なうことができる。なお、欠損者430が、健常者432の動作を見て、健常者432の動作が接近動作であるか、遠ざかる動作であるかを判定できる場合には、トランク動作であることを欠損者430に知らせることができればよいので、膨張収縮部材は1つでよく、膨張収縮部材を膨張させる機構(電磁弁)も1つでよい。その場合には、センサによってトランク動作が検出できればよく、接近する動作であるか又は遠ざかる動作まで検出できなくてもよい。
【0078】
また、対話相手のトランク動作が検出されたことを、欠損者に伝える器具は膨張収縮する部材に限定されない。気圧によって変形する密閉器具又は弾性アクチュエータで、通気管の端部を封じてもよい。また、通気管の端部に何も装着せずに、対話相手のトランク動作が検出されたときに、欠損者に空気を吹きつけてもよい。
【0079】
また、手首等に装着できる器具であってもよい。その場合、人に力を加える作用部は、皮膚に振動を与える装置、電極を皮膚に接触させて微弱な電気刺激を与える装置等であってもよい。
【0080】
また、本対話支援装置は、携帯型の装置であってもよい。その場合、センサ部は、眼鏡、衣服の胸ポケット、衣服の肩部分に装着すればよい。制御部からの電磁弁の制御は、ワイヤレス(無線、赤外線等)によって行なってもよい。
【0081】
以上、実施の形態を説明することにより本発明を説明したが、上記した実施の形態は例示であって、本発明は上記した実施の形態に限定されるものではなく、種々変更して実施することができる。
【符号の説明】
【0082】
100 制御部
102 CPU
104 ROM
106 RAM
108 HDD
110 インターフェイス部(IF部)
112 バス
116 センサ部
300 可動機構部
302 高圧空気源
304 駆動部
310 作動部
312 押出シリンダ
314 引戻シリンダ
316 シリンダ固定部材
318 作用部材
320 支持部材
【特許請求の範囲】
【請求項1】
対話中の一方の話者を支援する対話支援装置であって、
他方の話者のトランク動作を検出する検出手段と、
前記検出手段が、前記他方の話者のトランク動作を検出した場合に、前記一方の話者に力を加える作用手段とを備え、
前記トランク動作は、上半身を前方に倒してから戻す動作であることを特徴とする対話支援装置。
【請求項2】
前記作用手段は、椅子に装着され、前記椅子に座った前記一方の話者の上半身を前方に移動させる押出手段を備え、
前記押出手段は、前記検出手段が、前記他方の話者が上半身を前方に倒す動作を検出した場合に、前記一方の話者の上半身を前方に移動させることを特徴とする請求項1に記載の対話支援装置。
【請求項3】
前記作用手段は、椅子に装着され、前記椅子に座った前記一方の話者の上半身を後方に移動させる引戻手段を備え、
前記引戻手段は、前記検出手段が、前記他方の話者が上半身を後方に反らす動作を検出した場合に、前記一方の話者の上半身を後方に移動させることを特徴とする請求項2に記載の対話支援装置。
【請求項4】
前記押出手段は、気体又は液体を供給されて拡張する手段であり、前記椅子の背もたれと前記一方の話者の背中との間に配置され、
前記引戻手段は、気体又は液体を供給されて収縮する手段であり、前記椅子の背もたれと前記一方の話者の背中との間に配置されることを特徴とする請求項3に記載の対話支援装置。
【請求項5】
前記検出手段は、前記他方の話者を撮像して時系列の画像データを取得するイメージセンサを備え、
前記検出手段は、前記画像データ中の上半身領域を特定し、前記上半身領域の動きを検出することにより、前記トランク動作を検出することを特徴とする請求項1〜4に記載の対話支援装置。
【請求項6】
前記検出手段は、ドップラーセンサをさらに備え、
前記検出手段は、前記他方の話者のトランク動作を検出した場合、前記ドップラーセンサによって、前記他方の話者が上半身を前方に倒す動作を行なったか、前記他方の話者が上半身を後方に反らす動作を行なったかを検出することを特徴とする請求項5に記載の対話支援装置。
【請求項1】
対話中の一方の話者を支援する対話支援装置であって、
他方の話者のトランク動作を検出する検出手段と、
前記検出手段が、前記他方の話者のトランク動作を検出した場合に、前記一方の話者に力を加える作用手段とを備え、
前記トランク動作は、上半身を前方に倒してから戻す動作であることを特徴とする対話支援装置。
【請求項2】
前記作用手段は、椅子に装着され、前記椅子に座った前記一方の話者の上半身を前方に移動させる押出手段を備え、
前記押出手段は、前記検出手段が、前記他方の話者が上半身を前方に倒す動作を検出した場合に、前記一方の話者の上半身を前方に移動させることを特徴とする請求項1に記載の対話支援装置。
【請求項3】
前記作用手段は、椅子に装着され、前記椅子に座った前記一方の話者の上半身を後方に移動させる引戻手段を備え、
前記引戻手段は、前記検出手段が、前記他方の話者が上半身を後方に反らす動作を検出した場合に、前記一方の話者の上半身を後方に移動させることを特徴とする請求項2に記載の対話支援装置。
【請求項4】
前記押出手段は、気体又は液体を供給されて拡張する手段であり、前記椅子の背もたれと前記一方の話者の背中との間に配置され、
前記引戻手段は、気体又は液体を供給されて収縮する手段であり、前記椅子の背もたれと前記一方の話者の背中との間に配置されることを特徴とする請求項3に記載の対話支援装置。
【請求項5】
前記検出手段は、前記他方の話者を撮像して時系列の画像データを取得するイメージセンサを備え、
前記検出手段は、前記画像データ中の上半身領域を特定し、前記上半身領域の動きを検出することにより、前記トランク動作を検出することを特徴とする請求項1〜4に記載の対話支援装置。
【請求項6】
前記検出手段は、ドップラーセンサをさらに備え、
前記検出手段は、前記他方の話者のトランク動作を検出した場合、前記ドップラーセンサによって、前記他方の話者が上半身を前方に倒す動作を行なったか、前記他方の話者が上半身を後方に反らす動作を行なったかを検出することを特徴とする請求項5に記載の対話支援装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−47709(P2013−47709A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2011−185546(P2011−185546)
【出願日】平成23年8月29日(2011.8.29)
【出願人】(301022471)独立行政法人情報通信研究機構 (1,071)
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願日】平成23年8月29日(2011.8.29)
【出願人】(301022471)独立行政法人情報通信研究機構 (1,071)
【Fターム(参考)】
[ Back to top ]