
対象物の構成金属および対象物までの距離を検知するセンサおよび方法
【課題】本願発明は、対象物を構成する金属ならびに検知コイルから対象物までの距離を極めて短時間で検知できる材質測距センサを提供する。
【解決手段】本願発明に係る材質測距センサは、LCR共振回路部と、これに高周波電流を供給するための駆動部と、LCR共振回路部の駆動電圧および駆動電流を検出する駆動電圧検出手段および駆動電流検出手段と、駆動電圧および駆動電流からn次駆動電圧およびn次駆動電流を抽出するn次成分抽出手段と、n次駆動電圧およびn次駆動電流から共振周波数および負荷抵抗を算出する制御部と、複数の既知の金属、および複数の既知の対象物までの距離について事前に検知した共振周波数と負荷抵抗との関係を示す検知マップを記憶する記憶部とを備え、制御部は、算出された共振周波数および負荷抵抗と、記憶されたものとを比較して、対象物の構成金属または対象物までの距離を検知するものである。
【解決手段】本願発明に係る材質測距センサは、LCR共振回路部と、これに高周波電流を供給するための駆動部と、LCR共振回路部の駆動電圧および駆動電流を検出する駆動電圧検出手段および駆動電流検出手段と、駆動電圧および駆動電流からn次駆動電圧およびn次駆動電流を抽出するn次成分抽出手段と、n次駆動電圧およびn次駆動電流から共振周波数および負荷抵抗を算出する制御部と、複数の既知の金属、および複数の既知の対象物までの距離について事前に検知した共振周波数と負荷抵抗との関係を示す検知マップを記憶する記憶部とを備え、制御部は、算出された共振周波数および負荷抵抗と、記憶されたものとを比較して、対象物の構成金属または対象物までの距離を検知するものである。
【発明の詳細な説明】
【技術分野】
【0001】
本願発明は、対象物を構成する金属および対象物までの距離のうちの少なくとも一方(すなわち対象物の構成金属と対象物までの距離の両方またはいずれか一方)を検知するセンサおよび方法に関する。
【背景技術】
【0002】
従来より、金属からなる対象物までの距離を検知する測距センサとして、検知コイルと共振用のコイルを用いて、金属対象物までの距離に応じて変化するインダクタンスを検知することにより距離を計測するものが提案されていた。
【0003】
また特許文献1は、対象物までの距離を検知することを主たる目的とするセンサ(測距センサ)ではないが、近接する対象物が磁性または非磁性(鉄またはアルミニウム)であるかによらず同一の感度特性で検知し、あるいは磁性または非磁性の一方に対してより高い感度特性で検知する高周波発振型近接スイッチを記載している。すなわち特許文献1に記載の高周波発振型近接スイッチは、対象物を構成する金属の如何を判定する材質センサとして機能するものである。
より具体的には、この高周波発振型近接スイッチは、2つの共振タンク回路を有し、各共振タンク回路から出力される共振信号の振幅差が近接対象物の磁性特性によらず一定となるように回路を構成することにより、鉄およびアルミニウムに対する感度特性を同一にし、あるいは各共振タンク回路の共振周波数を選択的に設定することにより、鉄またはアルミニウムのみを検出するものである。
【0004】
一方、特許文献2は、同様に主たる目的を距離測定とするもの(測距センサ)ではないが、被検知物体が良導電体または磁性体であるかを検知する近接センサ(材質センサ)を教示している。
より詳細には、特許文献2に記載の近接センサは、位相比較回路を有し、発振器の出力電圧信号と負荷抵抗器の両端電圧信号の位相差に応じた電圧を検出し、位相差の変化により、被検知物体が良導電体または磁性体であるかを検知するものである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平02−312316号公報
【特許文献2】特開昭63−316515号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の高周波発振型近接スイッチによれば、近接対象物が鉄またはアルミニウムであるか否かを判別するためには、上述のように、各共振タンク回路の共振周波数を事前に設定しておくことが必要であり、一旦設定した後には、判別したい近接対象物の磁性特性を変更するには、各共振タンク回路の共振周波数の再設定が必要であり、容易でない。
また、磁性金属の中でも、鉄や磁性ステンレスなどさまざまな透磁率を有する磁性金属が存在し、同様に非磁性金属の中でも、非磁性ステンレス、アルミニウム、または銅などの異なる透磁率を有する非磁性金属があり、こうした広範な透磁率を有する任意の磁性または非磁性金属からなる対象物を検知するために、各共振タンク回路の共振周波数を選択的に設定することは極めて困難である。
さらに特許文献1に記載の高周波発振型近接スイッチは、特定の磁性特性を有する対象物が所定の位置に近接したことを検知するもの(材質センサ)であって、近接対象物までの距離を正確に検知することはできない(測距センサではない)。
【0007】
また特許文献2に記載の近接センサは、位相差の正負に基づいて、被検知物体が単に良導電体または磁性体であるかを検知するものであり、被検知物体を構成する材質についてまで検知することはできない。すなわち特許文献2に記載の近接センサは、特許文献1に記載の高周波発振型近接スイッチと同様、所定の位置に近接した被検知物体が良導電体であるか否かについて検知するものであり、被検知物体までの距離を正確に検知することはできない。
【0008】
したがって、対象物を構成する金属を検知するとともに、検知コイルから対象物までの距離を正確に検知するセンサの実現が望まれていた。また、こうした構成金属および対象物までの距離を瞬時に検知することができるセンサや、所望の金属材質からなる対象物を選択的に検知できる汎用性の高いセンサが期待されていた。
【課題を解決するための手段】
【0009】
そこで本願発明は、上記問題点を解消するためになされたもので、対象物を構成する金属ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知するセンサであって、検知コイルおよび共振コンデンサからなるLCR共振回路部と、前記LCR共振回路部に所定の周波数を有する高周波電流を供給するための駆動部と、前記LCR共振回路部の両端に印加される駆動電圧を検出する駆動電圧検出手段と、前記LCR共振回路部に流れる駆動電流を検出する駆動電流検出手段と、検出された駆動電圧および駆動電流から、前記所定の周波数のn倍(nは自然数)の周波数を有するn次成分を含むn次駆動電圧およびn次駆動電流を抽出するn次成分抽出手段と、n次駆動電圧およびn次駆動電流から、前記LCR共振回路部の共振周波数および負荷抵抗を算出する制御部と、複数の既知の対象物を構成する金属および複数の既知の検知コイルから対象物までの距離について事前に検知した共振周波数と負荷抵抗との関係を示す検知マップを記憶する記憶部とを備え、前記制御部は、算出された共振周波数および負荷抵抗と、前記記憶部で記憶された共振周波数および負荷抵抗とを比較することにより、対象物を構成する金属ならびに前記検知コイルから対象物までの距離のうちの少なくとも一方を検知することを特徴とするものである。
【発明の効果】
【0010】
本願発明に係る材質測距センサ(対象物を構成する金属ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知するセンサ)によれば、n次成分抽出手段を用いて検知コイルの共振周波数および負荷抵抗を瞬時に算出することにより、対象物を構成する金属ならびに検知コイルから対象物までの距離を極めて短時間で検知することができる。
【図面の簡単な説明】
【0011】
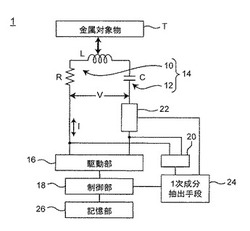
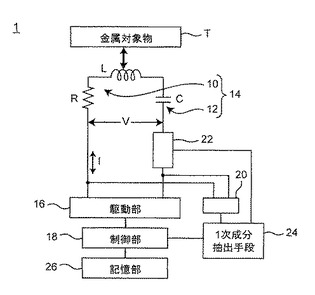
【図1】本願発明の実施の形態1に係る材質測距センサの概略的な電気的構成を示す回路ブロック図である。
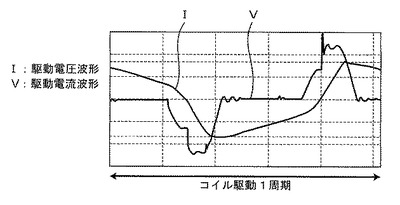
【図2】駆動電圧検出手段および駆動電流検出手段により検出された駆動電圧および駆動電流の波形図である。
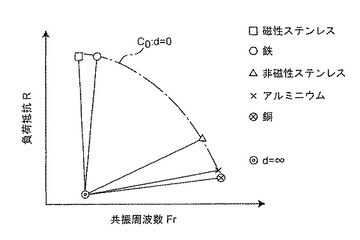
【図3】複数の既知の対象物を構成する金属および複数の既知の検知コイルから対象物までの距離について事前に検知した共振周波数と負荷抵抗との関係を示す検知マップを示すものである。
【図4】実施の形態1の変形例1に係る検知マップを示すものである。
【図5】実施の形態1の変形例2に係る検知マップを示すものである。
【図6】無限遠ポイントから対象物までの仮想的距離と、検知コイルから対象物までの実際の距離との関係を示すグラフである。
【図7】実施の形態2に係る材質測距センサの概略的な電気的構成を示す回路ブロック図である。
【図8】実施の形態3に係る材質測距センサの概略的な電気的構成を示す回路ブロック図である。
【図9】実施の形態3に係る材質測距センサが用いる検知マップを示すものである。
【図10】実施の形態3に係る材質測距センサが用いる別の検知マップを示すものである。
【図11】実施の形態4に係る材質測距センサの概略的な電気的構成を示す回路ブロック図である。
【発明を実施するための形態】
【0012】
以下、添付図面を参照して本願発明に係るセンサの実施の形態を説明する。本願発明に係るセンサは、対象物を構成する金属材質を特定するとともに、対象物までの距離を検知するものであり、この文脈において、以下単に「材質測距センサ」という。各実施の形態の説明および以下の添付図面において、同様の構成部品については同様の符号を用いて参照する。
【0013】
実施の形態1.
図1〜図6を参照しながら、本願発明に係る材質測距センサの実施の形態1について以下詳細に説明する。
図1は、実施の形態1に係る材質測距センサ1の概略的な電気的構成を示す回路ブロック図である。材質測距センサ1は、概略、金属からなる対象物Tに近接して対向する検知コイル10と、検知コイル10に直列に接続された共振コンデンサ12(静電容量C)と、検知コイル10および共振コンデンサ12で構成されたLCR共振回路部14に高周波電流を供給する駆動部16と、駆動部16を制御する制御部18とを有する。図1において、検知コイル10はインダクタンスLと負荷抵抗Rの等価回路として図示されている。また図1において、検知コイル10および共振コンデンサ12は直列に接続されているが、共振回路を構成するものであれば並列に接続したものであってもよい。
【0014】
駆動部16は、LCR共振回路部14に高周波電流を供給するものであれば任意の構成を有していてもよい。たとえば詳細図示しないが、商用電源を全波整流または半波整流する整流回路、これに並列に接続された平滑コンデンサ、およびIGBTなどのスイッチング素子を含むハーフブリッジ式またはフルブリッジ式のインバータ回路を用いて構成することができる。択一的には、スイッチング素子の代わりにオペアンプやトランジスタなどで駆動しても構わない。また整流回路の代わりに、乾電池等の携帯可能な蓄電池を用いてもよい。
【0015】
検知コイル10に高周波電流が供給されると、その周囲に交流磁場を形成し(交流磁場が金属対象物Tと鎖交し)、金属対象物Tに渦電流が流れる。このとき、検知コイル10の負荷抵抗Rは、金属対象物Tが無限遠に配置されているときの検知コイル10自体の線抵抗RCに、金属対象物Tが近接配置されたことによる金属対象物Tの見かけ上の負荷抵抗RLを加えたものに相当する(R=RC+RL)。
【0016】
また材質測距センサ1は、LCR共振回路部14の両端に印加される駆動電圧Vを検出する駆動電圧検出手段20と、LCR共振回路部14に流れる駆動電流Iを検出する駆動電流検出手段22と、駆動電圧検出手段20および駆動電流検出手段22に電気的に接続された1次成分抽出手段24とを有する。
【0017】
駆動電圧検出手段20は、LCR共振回路部14の両端に印加される駆動電圧(駆動部16の出力電圧)Vを検出するものであれば任意の回路構成を有していてもよい。
また、駆動電流検出手段22は、LCR共振回路部14に流れる駆動電流(駆動部16の出力電流)Iを測定するものであれば任意の回路構成を有していてもよく、実施の形態1に係る駆動電流検出手段22は、たとえばシャント抵抗と増幅アンプ、またはカレントトランスと負荷抵抗(いずれも図示せず)を用いて構成してもよい。
【0018】
制御部18は、駆動部16を構成するインバータ回路のIGBTなどのスイッチング素子に所定の駆動周波数(たとえば10kHz)でスイッチングする制御信号(ゲート信号)を供給するものであり、オペアンプやトランジスタに駆動周波数の信号を供給するものである。このとき駆動部16は、LCR共振回路部14に高周波電流を供給し、駆動電圧検出手段20および駆動電流検出手段22は、図2に示すような高周波変調された駆動電圧Vおよび駆動電流Iを検出する。なお、制御部18が駆動部16のスイッチング素子に供給する制御信号は、正弦波、矩形波、または三角波等の任意の波形を有するものであってもよい。
【0019】
一般に、高周波変調された駆動電圧Vおよび駆動電流Iは、駆動周波数の自然数倍の高次周波数成分を含む合成波形として表される。また駆動周波数がたとえば10kHzであるとき、検出される駆動電圧Vおよび駆動電流I(図2)の1周期は0.1m秒に相当する。
【0020】
本願発明に係る1次成分抽出手段24は、駆動電圧検出手段20および駆動電流検出手段22で検出された駆動電圧Vおよび駆動電流I(図2)を、より高いサンプリング周波数で離散フーリエ変換することにより、駆動電圧Vおよび駆動電流Iの1次成分だけを抽出するものである。より具体的には、1次成分抽出手段24は、A/D変換器(図示せず)を有し、図2に示すようなアナログ信号として検出された駆動電圧Vおよび駆動電流Iを、たとえば駆動周波数のk倍(kは2以上の自然数)のサンプリング周波数でサンプリングしてデジタル信号に変換し、サンプリングされた複数の高次周波数成分を有する信号から1次成分のみの信号を抽出するものである。なお高次周波数成分を有する信号から1次成分のみの信号を抽出する手法およびアルゴリズムとしては、任意のものを利用することができ、一般に市販されたソフトウェアを用いて駆動電圧Vおよび駆動電流Iの1次成分だけを抽出することができる。
【0021】
択一的には、1次成分抽出手段24の代わりに、A/D変換器でサンプリングされた複数の高次周波数成分を有する信号から、駆動電圧Vおよび駆動電流Iのより高次のn次成分(nは2以上の自然数、たとえば3次成分)を抽出するn次成分抽出手段を用いてもよい。すなわちn次成分抽出手段は、1次成分抽出手段24と互いに置換可能であるから、以下においては1次成分抽出手段24を用いて本願発明を説明する。
【0022】
1次成分抽出手段24で抽出される駆動電圧Vおよび駆動電流Iの1次成分は、次式のように複素表示することができる。
【数1】

ここで、V1,I1は駆動電圧Vおよび駆動電流Iの1次成分を示し、V1Re,I1ReはV1,I1の実部、V1Im,I1ImはV1,I1の虚部、そしてjは虚数単位を示す。
【0023】
このとき、LCR共振回路部14のインピーダンスZは次式で表される。
【数2】
ここで、ZReおよびZImはインピーダンスZの実部および虚部を示す。
【0024】
一方、LCR共振回路部14のインピーダンスZは、一般に、上記の検知コイル10のインダクタンスLおよび負荷抵抗R、ならびに共振コンデンサ12の静電容量Cを用いて、次式で表される。
【数3】
ここで、ωはf/2πで表される角速度である(fは駆動周波数と同じ)。
【0025】
すなわち、上記[数2]と[数3]を比較すると、次式が成立する。
【数4】
このとき、ωは1次成分の周波数f(すなわち駆動周波数と同一)を用いて表され(ω=2πf)、Cは共振コンデンサ12の静電容量であり、ともに既知の値である。
【0026】
また、LCR共振回路部14の共振周波数Frは、一般に、検知コイル10のインダクタンスLおよび共振コンデンサ12の静電容量Cを用いて、次式で表される。
【数5】
【0027】
したがって本願発明に係る制御部18は、駆動電圧Vおよび駆動電流Iの1次成分から、[数3]よりインピーダンスZの実部および虚部を求め、[数4]よりLCR共振回路部14の負荷抵抗RおよびインダクタンスLを算出して、さらに算出されたインダクタンスLから、[数5]よりLCR共振回路部14の共振周波数Frを算出することができる。
【0028】
ここで本願発明に係る材質測距センサ1を用いて、さまざまな既知の金属で構成された対象物Tについて、検知コイル10から対象物Tまでの距離を変化させて、LCR共振回路部14の共振周波数Frおよび負荷抵抗Rをあらかじめ算出し、共振周波数Frおよび負荷抵抗Rの関係を示す検知マップ(図3)を作成し、メモリ(記憶部)26に当該検知マップを記憶させる。
【0029】
図3において、材質測距センサ1は、たとえば鉄からなる対象物Tが検知コイル10に最接近したとき(対象物Tと検知コイル10との間の距離dが実質的にゼロであるとき(d=0))、一重丸(○)でプロットされた共振周波数Frおよび負荷抵抗Rを検知し、対象物Tが検知コイル10から無限遠の位置に配置されたとき(dが無限遠)、二重丸(◎)でプロットされた共振周波数Frおよび負荷抵抗Rを検知する。なお、負荷抵抗値Rがゼロとならないのは、負荷抵抗Rが検知コイル10自体の線抵抗RCを含むためである。
【0030】
また対象物Tと検知コイル10との間の距離dを増大させたとき、共振周波数Frおよび負荷抵抗Rの値は、一重丸でプロットされたポイントから、二重丸でプロットされたポイントに向かって推移する。そして本願発明に係る材質測距センサ1を用いて、距離dを変化させたときの共振周波数Frおよび負荷抵抗Rを事前に算出し、これらの値を距離dに関連付けてメモリ26に記憶しておく。
【0031】
同様に、本願発明に係る材質測距センサ1を用いて、対象物Tが磁性ステンレス(□)、非磁性ステンレス(△)、アルミニウム(×)、銅(☆)、およびこれらを任意に組み合わせたさまざまな合金(図示せず)である場合について、数多くの既知の距離dに対する共振周波数Frおよび負荷抵抗Rの値を事前に算出し、同様に距離dの関数としてメモリに記憶しておく。すなわち本願発明に係る材質測距センサ1は、複数の既知の金属材質Mおよび検知コイル10から対象物Tまでの複数の既知の距離dについて事前に検知した共振周波数Frおよび負荷抵抗Rの関係を示す検知マップを記憶するメモリ(記憶部)26を有するものである。
【0032】
そして本願発明に係る材質測距センサ1によれば、実際に、対象物Tの構成金属および対象物までの距離を検知するとき、制御部18は、上述のように共振周波数Frおよび負荷抵抗Rを算出し、これをメモリ26に記憶された共振周波数および負荷抵抗と比較することにより、対象物の構成金属Mおよび検知コイルから対象物までの距離dを検知することができる。
【0033】
より具体的には、検知マップ上の共振周波数Frおよび負荷抵抗Rの複数の(細分化された)ポイントに関する行列{Frij,Rij}について、事前に検知された対象物Tの構成金属および対象物までの距離に関する行列{Mij,dij}をメモリ26に記憶しておく。すなわちメモリ26は、検知マップ上の共振周波数Frおよび負荷抵抗Rのポイントに関する行列{Frij,Rij}により一意的に決定される対象物Tの構成金属および対象物までの距離に関する行列{Mij,dij}を記憶するものである。こうして材質測距センサ1は、実際の対象物Tについて検知された共振周波数と負荷抵抗(Fr,R)を算出し、メモリ26に記憶された検知マップを参照することにより、対応する金属材質と距離(M,d)を直ちに検知することができる。
【0034】
なお、算出される共振周波数と負荷抵抗(Fr,R)は、検知コイル10に対向する対象物Tの大きさ(面積)にも影響されるので、本願発明に係る材質測距センサ1は、対象物Tより十分に小さい検知コイル10を有するものとして構成するか、あるいは検知コイル10が対象物Tより小さいときには、その小さい既知の対象物Tについて事前に検知された共振周波数と負荷抵抗(Fr,R)に対応する金属材質と距離(M,d)をメモリ26に記憶させておくことが好ましい。
【0035】
変形例1.
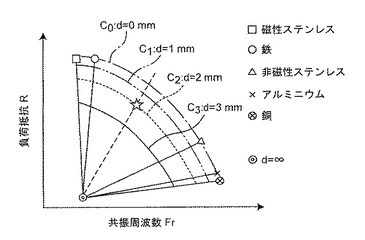
択一的には、本願発明に係るメモリは、図4に示す検知マップにおいて、対象物Tがさまざまな構成金属について対象物までの距離dがたとえば0mm,1mm,2mm,3mm,・・・,となるポイントを結ぶ曲線C0,C1,C2,C3,・・・,に関する情報(これらの曲線を表す関数として)を記憶しておき、材質測距センサ1による実際の対象物Tの検知で算出された共振周波数と負荷抵抗(Fr,R)に基づいて、対象物Tまでの距離dを直ちに検知するようにしてもよい。
たとえば、対象物Tについて実際に算出された共振周波数と負荷抵抗(Fr,R)について検知マップ上でプロットしたポイント(図4の星印で示す)が、距離dが2mmとなるポイントを結ぶ曲線C2上にあることから、対象物Tまでの距離dが2mmであることを直ちに検知することができる。
【0036】
また金属材質Mに関しては、曲線C0上の複数のポイントに対応するもののみ、メモリ26に記憶しておく。そして算出された共振周波数と負荷抵抗(Fr,R)は、上記二重丸で示す無限遠ポイントから直線的に推移すると仮定し、実際に算出された共振周波数と負荷抵抗(Fr,R)のポイント(星印)と上記二重丸で示す無限遠ポイントとを結ぶ直線(長い破線で示す)と、距離dが0mmとなるポイントを結ぶ曲線C0との交点を求め、この交点における共振周波数と負荷抵抗(Fr,R)に対応する金属材質Mをメモリ26から読み出すことにより、対象物Tの構成金属Mを簡便に推知することができる。
【0037】
このように変形例1に係る材質測距センサ1によれば、対象物までの距離dが所定の距離となるポイントを結ぶ曲線Ciに関する情報と、曲線C0上の複数のポイントに対応する金属材質Mに関する情報とを記憶することにより、実際の対象物Tについて算出された共振周波数と負荷抵抗(Fr,R)に基づいて、対応する金属材質と距離(M,d)を直ちに検知することができる。
すなわち変形例1に係るメモリ26は、実施の形態1のように、検知マップ上の細分化された膨大な数の共振周波数と負荷抵抗(Fr,R)のポイントに対する金属材質と距離(M,d)のデータ(行列{Frij,Rij}に対応する行列{Mij,dij})を記憶する必要がない。したがって変形例1に係る材質測距センサ1によれば、対象物Tに関する共振周波数と負荷抵抗(Fr,R)に対応する金属材質と距離(M,d)について事前に検知する労力を実質的に省略することが可能であり、より小さい容量を有するメモリ26を用いることが可能であるので、製造コストを大幅に削減することができる。
【0038】
変形例2.
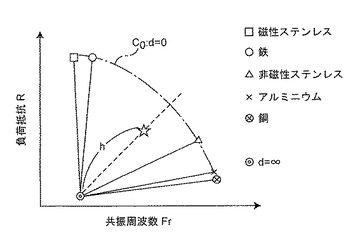
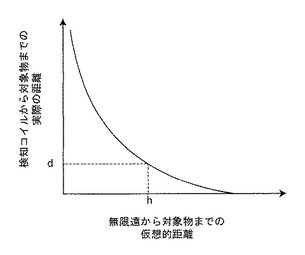
さらに択一的には、図5に示すように、この検知マップ上の仮想的な距離hと、検知コイル10から対象物Tまでの実際の距離dとの間に図6のグラフに示すような関係があると仮定することにより、検知コイル10から対象物Tまでの距離dを簡便に推知するようにしてもよい。
たとえば図5の検知マップにおいて、算出された共振周波数と負荷抵抗(Fr,R)と無限遠ポイント(Fr0,R0)との仮想的距離hを以下のように定義する。
【数6】
【0039】
図6は、検知マップ上の無限遠ポイント(Fr0,R0)から対象物Tまでの仮想的距離hと、検知コイル10から対象物Tまでの実際の距離dとの関係を示すグラフである。図6に示すように、仮想的距離hは、対象物Tから検知コイル10までの実際の距離dが実質的にゼロとなったとき、共振周波数と負荷抵抗(Fr,R)は最大となり、対象物Tが検知コイル10から遠ざかるにつれて(すなわち実際の距離dが大きくなるにつれて)、共振周波数と負荷抵抗(Fr,R)は無限遠ポイント(Fr0,R0)に向かって小さくなり、仮想的距離hも小さくなる。換言すると、仮想的距離hが小さくなるほど、対象物Tまでの実際の距離dは指数関数的に(または非線形的に)増大する。
【0040】
たとえば対象物Tについて実際に算出された共振周波数と負荷抵抗(Fr,R)が図5の検知マップ上の星印で示すポイントでプロットされるとき、仮想的距離hに対応する実際の距離dを図6のグラフから読み取ることができる。また図6のグラフを規定する試行関数を事前に定義してメモリ26に記憶しておくことにより、算出された共振周波数と負荷抵抗(Fr,R)から直ちに実際の距離dを算出することができる。
【0041】
また金属材質Mに関しては、変形例1と同様、曲線C0上の複数のポイントに対応する金属材質Mのみをメモリ26に記憶しておき、実際に算出された共振周波数と負荷抵抗(Fr,R)のポイント(星印)と上記二重丸で示す無限遠ポイントとを結ぶ直線(長い破線で示す)と、距離dが0mmとなるポイントを結ぶ曲線C0との交点を求め、この交点における金属材質Mをメモリ26から読み出すことにより、対象物Tの構成金属Mを推知することができる。
【0042】
このように変形例2によれば、図6のグラフに示す試行関数を表す情報と、曲線C0上の複数のポイントに対応する金属材質Mに関する情報とを記憶することにより、算出された共振周波数と負荷抵抗(Fr,R)に対応する距離dを事前に検知して記憶するまでもなく、算出された共振周波数と負荷抵抗(Fr,R)から構成金属と距離(M,d)を極めて簡便な手法で推知することができる。よって、変形例2に係る材質測距センサ1によれば、変形例1に比して、既知の対象物Tについて事前に算出された共振周波数と負荷抵抗(Fr,R)に対応する距離dをあらかじめ記憶しておく必要がなく、よりいっそう小さい容量を有するメモリ26を用いて、製造コストをさらに削減することができる。
【0043】
以上のように本願発明に係る材質測距センサ1は、1次成分抽出手段24(またはn次成分抽出手段)を用いて、瞬時に(駆動周波数が10kHzのとき0.1m秒で)LCR共振回路部14の駆動電圧Vおよび駆動電流Iを抽出し、抽出された駆動電圧Vおよび駆動電流Iに基づいてLCR共振回路部14の共振周波数と負荷抵抗(Fr,R)を算出する。そして本願発明に係る材質測距センサ1は、算出された共振周波数と負荷抵抗(Fr,R)を、メモリ26に記憶された構成金属と距離(M,d)を関連付けた事前検知の共振周波数と負荷抵抗(Fr,R)と比較することにより、対象物Tの構成金属と距離(M,d)を極めて迅速に検知することができる。
【0044】
なお、本願発明に係る材質測距センサ1は、上述のように、対象物Tの構成金属および距離(M,d)の両方を検知することができるが、単に対象物Tまでの距離(d)のみを検知する測距センサとしても利用することができ、あるいは対象物Tの構成金属(M)を専ら検知する近接センサまたは材質センサとして活用することができる。
【0045】
実施の形態2.
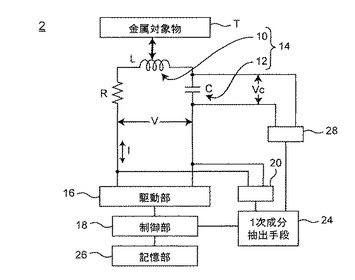
図7を参照しながら、本願発明に係る材質測距センサの実施の形態2について以下に説明する。実施の形態2に係る材質測距センサ2は、その駆動電流検出手段22が共振コンデンサ12の両端のコンデンサ電圧を検出するコンデンサ電圧検出手段28を有し、コンデンサ電圧VCからLCR共振回路部14に流れる駆動電流Iを検出する点を除いて、実施の形態1の材質測距センサ1と同様の構成を有するので、その他の構成部品に関連する詳細な説明を省略する。なお図中、同一の構成部品については同一の符号を用いて示す。
【0046】
図7は、実施の形態2に係る材質測距センサ2の概略的な電気的構成を示す、図1と同様の回路ブロック図である。実施の形態1に係る材質測距センサ1は、シャント抵抗と増幅アンプ、またはカレントトランスと負荷抵抗等で構成された駆動電流検出手段22を用いて、LCR共振回路部14に流れる駆動電流Iを検出するものであった。しかしながら、こうしたカレントトランスは高価であり、シャント抵抗は抵抗値が低いものの大電流が流れると発熱して相当の電力損失が生じる。そこで実施の形態2に係る材質測距センサ2によれば、図7に示すように、コンデンサ電圧検出手段28を用いて、共振コンデンサ12の両端のコンデンサ電圧VCを検出し、コンデンサ電圧VCからLCR共振回路部14に流れる駆動電流Iを検出する。
この文脈において、実施の形態2に係る駆動電流検出手段22は、共振コンデンサ12の両端のコンデンサ電圧VCを検出するコンデンサ電圧検出手段28を有し、コンデンサ電圧VCからLCR共振回路部14に流れる駆動電流Iを検出するものである。
【0047】
より具体的に説明すると、コンデンサ電圧VCは、駆動電圧検出手段20が検出する駆動電圧Vと同様、駆動周波数の自然数倍の高次周波数成分を含み、1次成分抽出手段24を用いて離散フーリエ変換することにより、コンデンサ電圧VCの1次成分VC1(駆動周波数と同一の周波数を有する成分)のみを抽出し、複素表示することができる。そしてコンデンサ電圧VCの1次成分VC1と駆動電流I1とは、次の関係式を満たす。
【数7】
ここでωはf/2πで表される角速度である(fは駆動周波数と同じ)、Cは共振コンデンサ12の静電容量であり、ともに既知の値である。
【0048】
こうして、実施の形態2に係る材質測距センサ2は、コンデンサ電圧検出手段28を用いてコンデンサ電圧VCを検出し、1次成分抽出手段24を用いてコンデンサ電圧VCの1次成分VC1を抽出し、制御部18により[数7]を求めることにより、実施の形態1に係る材質測距センサ1と同様、LCR共振回路部14の駆動電流I1を算出することができる。すなわち、実施の形態2に係る材質測距センサ2は、高価なカレントトランスや、電力損失が大きいシャント抵抗を用いることなく、安価で、かつ信頼性の高い駆動電流検出手段22を用いて、駆動電流I1を算出することができる。
【0049】
実施の形態2に係る材質測距センサ2は、LCR共振回路部14の駆動電流I1および駆動電圧Vを求めた後は、実施の形態1と同様に、LCR共振回路部14の負荷抵抗Rおよび共振周波数Frを算出し、メモリ26に記憶された検知マップを参照することにより、対象物Tを構成する金属および対象物Tまでの距離(M,d)を極めて迅速に検知することができる。
また、実施の形態2に係る材質測距センサ2は、実施の形態1と同様、対象物Tの構成金属および距離(M,d)の両方を検知できるが、いずれか一方を検知する測距センサまたは近接センサ(材質センサ)として利用することもできる。
【0050】
なお、コンデンサ電圧VCは、特に共振点近くにおいて高くなるので、駆動電圧検出手段20で用いられる共振コンデンサ12は、耐圧の高いものを利用することが好ましい。あるいはコンデンサ電圧VCが極めて高い場合には、コンデンサ電圧検出手段28は、これを分圧して、分圧されたコンデンサ電圧を検出してもよい。
さらに付言すると、実施の形態2においても、実施の形態1と同様、1次成分抽出手段24の代わりに、n次成分抽出手段(図示せず)を用いて、駆動周波数のn倍と周波数成分を有するn次成分VCnを抽出し、制御部18は[数7]からn次成分の駆動電流Inを算出するようにしてもよい。
【0051】
実施の形態3.
図8〜図10を参照しながら、本願発明に係る材質測距センサの実施の形態3について以下に説明する。実施の形態3に係る材質測距センサ3は、概略、検知マップ上の検知領域DRと非検知領域NRを設定できる点を除いて、実施の形態1の材質測距センサ1と同様の構成を有するので、その他の構成部品に関連する詳細な説明を省略する。なお図中、同一の構成部品については同一の符号を用いて示す。
【0052】
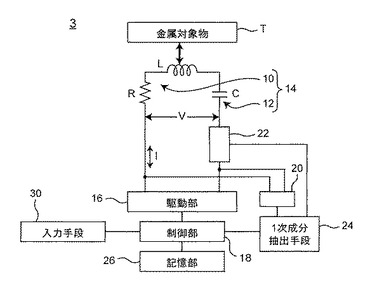
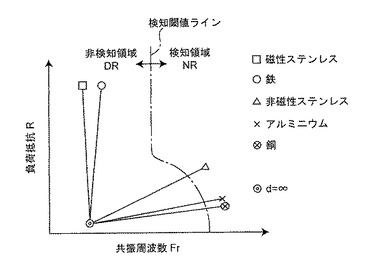
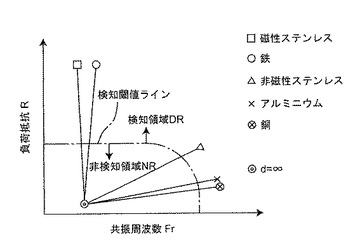
図8は、実施の形態3に係る材質測距センサ3の概略的な電気的構成を示す、図1と同様の回路ブロック図である。図9および図10は、実施の形態3に係るメモリ26に事前に記憶された共振周波数および負荷抵抗(Fr,R)に関する検知マップである。
図8に示す材質測距センサ3は、メモリ26で記憶された検知マップ上において、検知領域DRおよび非検知領域NRをユーザにより設定できる入力手段30を有する。そして実施の形態3に係る制御部18は、算出された共振周波数Frおよび負荷抵抗Rが検知マップ上の検知領域DRに含まれる場合に限り、対象物Tを構成する材質Mまたは検知コイルから対象物までの距離d、あるいは両方を検知するものである。
【0053】
たとえばユーザが入力手段30を用いて、メモリ26に記憶された検知マップにおいて、図9に示すような検知閾値ライン(図9の一点鎖線で示す)により検知領域DRおよび非検知領域NRを画定してもよい。なお入力手段30は、当業者により広く知られた任意の入力装置を用いることができ、たとえば手書き入力を可能とするグラフィックデバイスインターフェイス(GDI)を有するタッチパネルであってもよいし、単に数値閾値を入力するテンキーであってもよい。
【0054】
入力手段30を用いて、図9に示す検知領域DRおよび非検知領域NRが設定されたとき、実施の形態3の制御部18は、対象物Tが磁性ステンレスおよび鉄等の磁性金属で構成される場合には、算出される共振周波数Frおよび負荷抵抗Rが非検知領域NRに属するので対象物Tを検知しない。他方、制御部18は、対象物Tが非磁性ステンレス、アルミニウム、および銅またはこれらの合金等の非磁性金属で構成される場合には、算出された共振周波数Frおよび負荷抵抗Rが検知マップ上の検知領域DRに含まれるので、これらの特定の材質からなる対象物Tに限定して、対象物Tまでの距離dを検知する。したがって、図9に示す検知領域DRおよび非検知領域NRが設定された検知マップを有する材質測距センサ3は、専ら特定の非磁性金属(M)で構成された対象物Tまでの距離dを検知する近接センサまたは材質センサとして利用することができる。
【0055】
同様に、入力手段30を用いて、図10に示す検知領域DRおよび非検知領域NRが設定されたとき、実施の形態3の制御部18は、磁性金属に対しては距離dがより広い範囲にある対象物Tを検知するのに対し、非磁性金属に対しては距離dがより狭い範囲にある対象物Tを検知する。したがって、図10に示す検知領域DRおよび非検知領域NRが設定された検知マップを有する材質測距センサ3は、磁性金属の対象物Tに対する距離dについては、より高い感度で検知し、非磁性金属の対象物Tに対する距離dについては、比較的に低い感度で検知する測距センサとして利用することができる。
【0056】
上記説明したように、実施の形態3に係る材質測距センサ3は、検知マップ上の検知領域DRと非検知領域NRを任意に設定できる入力手段30を有するので、特定の構成材料からなる金属対象物Tに限定して検知する近接センサ(または材質センサ)、または構成材料に応じて異なる精度で対象物Tまでの距離dを検知する測距センサとして利用することができる。このように実施の形態3に係る材質測距センサ3は、用途に応じてユーザにより感度特性を任意に設定できる、極めて汎用性が高いセンサとして利用することができる。
【0057】
なお、実施の形態3の入力手段30は、検知マップ上の検知領域DRおよび非検知領域NRを、ユーザ側で任意に設定できるものとして説明したが、メーカ側で設定できるものであってもよい。
さらに択一的には、メーカが事前に設定した検知領域DRおよび非検知領域NRを、既知の対象物Tについて事前に検知された共振周波数と負荷抵抗(Fr,R)に対する金属材質と距離(M,d)とともに、メモリ26内に記憶させて、特定の用途を有する材質測距センサ1としてユーザに提供してもよい。すなわち実施の形態3の材質測距センサ1は、入力手段30を有さず、これに内蔵されたメモリ26に、検知領域DRと非検知領域NRを事前に記憶させておいてもよい。
【0058】
実施の形態4.
図11を参照しながら、本願発明に係る材質測距センサの実施の形態4について以下に説明する。実施の形態4に係る材質測距センサ4は、概略、算出された負荷抵抗Rおよび抽出された駆動電流Iに基づいて、検知コイル10が電磁誘導により対象物Tに与えた電力量Qを算出する電力量算出手段32をさらに有する点を除いて、実施の形態1の材質測距センサ1と同様の構成を有するので、その他の構成部品に関連する詳細な説明を省略する。なお図中、同一の構成部品については同一の符号を用いて示す。
【0059】
図11は、実施の形態4に係る材質測距センサ4の概略的な電気的構成を示す、図1と同様の回路ブロック図である。図11に示す材質測距センサ4は、制御部18と、1次成分抽出手段(またはn次成分抽出手段)24とに電気的に接続された電力量算出手段32を有する。この電力量算出手段32は、制御部18で算出された負荷抵抗Rと、1次成分抽出手段24で抽出された駆動電流Iとに基づいて、検知コイル10が電磁誘導により対象物Tに与えた電力量Q(すなわち対象物Tの発熱量)を算出するものである。
【0060】
上述のように、負荷抵抗Rは、金属対象物Tが無限遠に配置されているときの検知コイル10自体の線抵抗RCに、金属対象物Tが近接配置されたことによる金属対象物Tの見かけ上の負荷抵抗RLを加えたものに相当する(R=RC+RL)。
このとき、検知コイル10が電磁誘導により対象物Tに与えた電力Wは、次式で算出することができる。
【数8】
ここで、I1*はI1の共役複素数を示す。また検知コイル10が電磁誘導により対象物Tに与えた電力量Qは、検知コイル10が電磁誘導により対象物Tに与えた電力Wを所定期間積分したものである。したがって、実施の形態4の電力量算出手段32は、制御部18で算出された負荷抵抗R(金属対象物Tの見かけ上の負荷抵抗RL)と、1次成分抽出手段24(またはn次成分抽出手段)で抽出された駆動電流Iとに基づいて、[数8]より検知コイル10が電磁誘導により対象物Tに与えた電力量Q(電力W)、すなわち対象物Tの発熱量を算出することができる。
【0061】
そして実施の形態4に係る制御部18は、算出された電力量Qが所定の閾値電力量Qthを越えたとき(Q>Qth)、対象物Tに過剰な電力量Qが供給されたと判断して、LCR共振回路部14に対する高周波電流の供給を停止または低減するように駆動部16を制御するものである。
たとえば対象物Tが検知コイル10に近接した状態で長時間放置されたとき、検知コイル10による誘導加熱で対象物Tが過剰に加熱される場合があるが、実施の形態4によれば、電力量算出手段32で算出された対象物Tの発熱量(電力量Q)を常時モニタし、これが閾値電力量Qthを越えたとき、LCR共振回路部14に対する高周波電流の供給を停止または低減することにより、対象物Tの過剰な発熱を未然に防止することができる。
【0062】
金属対象物Tの見かけ上の負荷抵抗RLは、一般に、金属対象物Tの温度とともに増大する傾向があり、対象物Tが過熱されると、負荷抵抗Rの算出、ひいては対象物Tの構成金属および対象物Tまでの距離(M,d)にも影響を与え得る。しかしながら、実施の形態4によれば、上述のように、対象物Tが過熱されることを防止して、高い精度を維持しつつ、対象物Tの構成材質または対象物Tまでの距離、あるいは両方を検知することができる。
【0063】
なお、制御部18は、算出された対象物Tの発熱量(電力量Q)が閾値電力量Qthを越えたと判断した後、算出された対象物Tまでの距離dが再び無限遠になった(または所定の距離以上離れた)ことを検知したとき、別の対象物Tについて構成材質または距離(M,d)を測定するために、それまで行っていた発熱量(電力量Q)の演算をリセットすることが好ましい。
【符号の説明】
【0064】
1〜4:材質測距センサ、10:検知コイル、12:共振コンデンサ、14:LCR共振回路部、16:駆動部、18:制御部、20:駆動電圧検出手段、22:駆動電流検出手段、24:1次成分抽出手段(n次成分抽出手段)、26:メモリ(記憶部)、28:コンデンサ電圧検出手段、30:入力手段、32:電力量算出手段、T:対象物。
【技術分野】
【0001】
本願発明は、対象物を構成する金属および対象物までの距離のうちの少なくとも一方(すなわち対象物の構成金属と対象物までの距離の両方またはいずれか一方)を検知するセンサおよび方法に関する。
【背景技術】
【0002】
従来より、金属からなる対象物までの距離を検知する測距センサとして、検知コイルと共振用のコイルを用いて、金属対象物までの距離に応じて変化するインダクタンスを検知することにより距離を計測するものが提案されていた。
【0003】
また特許文献1は、対象物までの距離を検知することを主たる目的とするセンサ(測距センサ)ではないが、近接する対象物が磁性または非磁性(鉄またはアルミニウム)であるかによらず同一の感度特性で検知し、あるいは磁性または非磁性の一方に対してより高い感度特性で検知する高周波発振型近接スイッチを記載している。すなわち特許文献1に記載の高周波発振型近接スイッチは、対象物を構成する金属の如何を判定する材質センサとして機能するものである。
より具体的には、この高周波発振型近接スイッチは、2つの共振タンク回路を有し、各共振タンク回路から出力される共振信号の振幅差が近接対象物の磁性特性によらず一定となるように回路を構成することにより、鉄およびアルミニウムに対する感度特性を同一にし、あるいは各共振タンク回路の共振周波数を選択的に設定することにより、鉄またはアルミニウムのみを検出するものである。
【0004】
一方、特許文献2は、同様に主たる目的を距離測定とするもの(測距センサ)ではないが、被検知物体が良導電体または磁性体であるかを検知する近接センサ(材質センサ)を教示している。
より詳細には、特許文献2に記載の近接センサは、位相比較回路を有し、発振器の出力電圧信号と負荷抵抗器の両端電圧信号の位相差に応じた電圧を検出し、位相差の変化により、被検知物体が良導電体または磁性体であるかを検知するものである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平02−312316号公報
【特許文献2】特開昭63−316515号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の高周波発振型近接スイッチによれば、近接対象物が鉄またはアルミニウムであるか否かを判別するためには、上述のように、各共振タンク回路の共振周波数を事前に設定しておくことが必要であり、一旦設定した後には、判別したい近接対象物の磁性特性を変更するには、各共振タンク回路の共振周波数の再設定が必要であり、容易でない。
また、磁性金属の中でも、鉄や磁性ステンレスなどさまざまな透磁率を有する磁性金属が存在し、同様に非磁性金属の中でも、非磁性ステンレス、アルミニウム、または銅などの異なる透磁率を有する非磁性金属があり、こうした広範な透磁率を有する任意の磁性または非磁性金属からなる対象物を検知するために、各共振タンク回路の共振周波数を選択的に設定することは極めて困難である。
さらに特許文献1に記載の高周波発振型近接スイッチは、特定の磁性特性を有する対象物が所定の位置に近接したことを検知するもの(材質センサ)であって、近接対象物までの距離を正確に検知することはできない(測距センサではない)。
【0007】
また特許文献2に記載の近接センサは、位相差の正負に基づいて、被検知物体が単に良導電体または磁性体であるかを検知するものであり、被検知物体を構成する材質についてまで検知することはできない。すなわち特許文献2に記載の近接センサは、特許文献1に記載の高周波発振型近接スイッチと同様、所定の位置に近接した被検知物体が良導電体であるか否かについて検知するものであり、被検知物体までの距離を正確に検知することはできない。
【0008】
したがって、対象物を構成する金属を検知するとともに、検知コイルから対象物までの距離を正確に検知するセンサの実現が望まれていた。また、こうした構成金属および対象物までの距離を瞬時に検知することができるセンサや、所望の金属材質からなる対象物を選択的に検知できる汎用性の高いセンサが期待されていた。
【課題を解決するための手段】
【0009】
そこで本願発明は、上記問題点を解消するためになされたもので、対象物を構成する金属ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知するセンサであって、検知コイルおよび共振コンデンサからなるLCR共振回路部と、前記LCR共振回路部に所定の周波数を有する高周波電流を供給するための駆動部と、前記LCR共振回路部の両端に印加される駆動電圧を検出する駆動電圧検出手段と、前記LCR共振回路部に流れる駆動電流を検出する駆動電流検出手段と、検出された駆動電圧および駆動電流から、前記所定の周波数のn倍(nは自然数)の周波数を有するn次成分を含むn次駆動電圧およびn次駆動電流を抽出するn次成分抽出手段と、n次駆動電圧およびn次駆動電流から、前記LCR共振回路部の共振周波数および負荷抵抗を算出する制御部と、複数の既知の対象物を構成する金属および複数の既知の検知コイルから対象物までの距離について事前に検知した共振周波数と負荷抵抗との関係を示す検知マップを記憶する記憶部とを備え、前記制御部は、算出された共振周波数および負荷抵抗と、前記記憶部で記憶された共振周波数および負荷抵抗とを比較することにより、対象物を構成する金属ならびに前記検知コイルから対象物までの距離のうちの少なくとも一方を検知することを特徴とするものである。
【発明の効果】
【0010】
本願発明に係る材質測距センサ(対象物を構成する金属ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知するセンサ)によれば、n次成分抽出手段を用いて検知コイルの共振周波数および負荷抵抗を瞬時に算出することにより、対象物を構成する金属ならびに検知コイルから対象物までの距離を極めて短時間で検知することができる。
【図面の簡単な説明】
【0011】
【図1】本願発明の実施の形態1に係る材質測距センサの概略的な電気的構成を示す回路ブロック図である。
【図2】駆動電圧検出手段および駆動電流検出手段により検出された駆動電圧および駆動電流の波形図である。
【図3】複数の既知の対象物を構成する金属および複数の既知の検知コイルから対象物までの距離について事前に検知した共振周波数と負荷抵抗との関係を示す検知マップを示すものである。
【図4】実施の形態1の変形例1に係る検知マップを示すものである。
【図5】実施の形態1の変形例2に係る検知マップを示すものである。
【図6】無限遠ポイントから対象物までの仮想的距離と、検知コイルから対象物までの実際の距離との関係を示すグラフである。
【図7】実施の形態2に係る材質測距センサの概略的な電気的構成を示す回路ブロック図である。
【図8】実施の形態3に係る材質測距センサの概略的な電気的構成を示す回路ブロック図である。
【図9】実施の形態3に係る材質測距センサが用いる検知マップを示すものである。
【図10】実施の形態3に係る材質測距センサが用いる別の検知マップを示すものである。
【図11】実施の形態4に係る材質測距センサの概略的な電気的構成を示す回路ブロック図である。
【発明を実施するための形態】
【0012】
以下、添付図面を参照して本願発明に係るセンサの実施の形態を説明する。本願発明に係るセンサは、対象物を構成する金属材質を特定するとともに、対象物までの距離を検知するものであり、この文脈において、以下単に「材質測距センサ」という。各実施の形態の説明および以下の添付図面において、同様の構成部品については同様の符号を用いて参照する。
【0013】
実施の形態1.
図1〜図6を参照しながら、本願発明に係る材質測距センサの実施の形態1について以下詳細に説明する。
図1は、実施の形態1に係る材質測距センサ1の概略的な電気的構成を示す回路ブロック図である。材質測距センサ1は、概略、金属からなる対象物Tに近接して対向する検知コイル10と、検知コイル10に直列に接続された共振コンデンサ12(静電容量C)と、検知コイル10および共振コンデンサ12で構成されたLCR共振回路部14に高周波電流を供給する駆動部16と、駆動部16を制御する制御部18とを有する。図1において、検知コイル10はインダクタンスLと負荷抵抗Rの等価回路として図示されている。また図1において、検知コイル10および共振コンデンサ12は直列に接続されているが、共振回路を構成するものであれば並列に接続したものであってもよい。
【0014】
駆動部16は、LCR共振回路部14に高周波電流を供給するものであれば任意の構成を有していてもよい。たとえば詳細図示しないが、商用電源を全波整流または半波整流する整流回路、これに並列に接続された平滑コンデンサ、およびIGBTなどのスイッチング素子を含むハーフブリッジ式またはフルブリッジ式のインバータ回路を用いて構成することができる。択一的には、スイッチング素子の代わりにオペアンプやトランジスタなどで駆動しても構わない。また整流回路の代わりに、乾電池等の携帯可能な蓄電池を用いてもよい。
【0015】
検知コイル10に高周波電流が供給されると、その周囲に交流磁場を形成し(交流磁場が金属対象物Tと鎖交し)、金属対象物Tに渦電流が流れる。このとき、検知コイル10の負荷抵抗Rは、金属対象物Tが無限遠に配置されているときの検知コイル10自体の線抵抗RCに、金属対象物Tが近接配置されたことによる金属対象物Tの見かけ上の負荷抵抗RLを加えたものに相当する(R=RC+RL)。
【0016】
また材質測距センサ1は、LCR共振回路部14の両端に印加される駆動電圧Vを検出する駆動電圧検出手段20と、LCR共振回路部14に流れる駆動電流Iを検出する駆動電流検出手段22と、駆動電圧検出手段20および駆動電流検出手段22に電気的に接続された1次成分抽出手段24とを有する。
【0017】
駆動電圧検出手段20は、LCR共振回路部14の両端に印加される駆動電圧(駆動部16の出力電圧)Vを検出するものであれば任意の回路構成を有していてもよい。
また、駆動電流検出手段22は、LCR共振回路部14に流れる駆動電流(駆動部16の出力電流)Iを測定するものであれば任意の回路構成を有していてもよく、実施の形態1に係る駆動電流検出手段22は、たとえばシャント抵抗と増幅アンプ、またはカレントトランスと負荷抵抗(いずれも図示せず)を用いて構成してもよい。
【0018】
制御部18は、駆動部16を構成するインバータ回路のIGBTなどのスイッチング素子に所定の駆動周波数(たとえば10kHz)でスイッチングする制御信号(ゲート信号)を供給するものであり、オペアンプやトランジスタに駆動周波数の信号を供給するものである。このとき駆動部16は、LCR共振回路部14に高周波電流を供給し、駆動電圧検出手段20および駆動電流検出手段22は、図2に示すような高周波変調された駆動電圧Vおよび駆動電流Iを検出する。なお、制御部18が駆動部16のスイッチング素子に供給する制御信号は、正弦波、矩形波、または三角波等の任意の波形を有するものであってもよい。
【0019】
一般に、高周波変調された駆動電圧Vおよび駆動電流Iは、駆動周波数の自然数倍の高次周波数成分を含む合成波形として表される。また駆動周波数がたとえば10kHzであるとき、検出される駆動電圧Vおよび駆動電流I(図2)の1周期は0.1m秒に相当する。
【0020】
本願発明に係る1次成分抽出手段24は、駆動電圧検出手段20および駆動電流検出手段22で検出された駆動電圧Vおよび駆動電流I(図2)を、より高いサンプリング周波数で離散フーリエ変換することにより、駆動電圧Vおよび駆動電流Iの1次成分だけを抽出するものである。より具体的には、1次成分抽出手段24は、A/D変換器(図示せず)を有し、図2に示すようなアナログ信号として検出された駆動電圧Vおよび駆動電流Iを、たとえば駆動周波数のk倍(kは2以上の自然数)のサンプリング周波数でサンプリングしてデジタル信号に変換し、サンプリングされた複数の高次周波数成分を有する信号から1次成分のみの信号を抽出するものである。なお高次周波数成分を有する信号から1次成分のみの信号を抽出する手法およびアルゴリズムとしては、任意のものを利用することができ、一般に市販されたソフトウェアを用いて駆動電圧Vおよび駆動電流Iの1次成分だけを抽出することができる。
【0021】
択一的には、1次成分抽出手段24の代わりに、A/D変換器でサンプリングされた複数の高次周波数成分を有する信号から、駆動電圧Vおよび駆動電流Iのより高次のn次成分(nは2以上の自然数、たとえば3次成分)を抽出するn次成分抽出手段を用いてもよい。すなわちn次成分抽出手段は、1次成分抽出手段24と互いに置換可能であるから、以下においては1次成分抽出手段24を用いて本願発明を説明する。
【0022】
1次成分抽出手段24で抽出される駆動電圧Vおよび駆動電流Iの1次成分は、次式のように複素表示することができる。
【数1】
ここで、V1,I1は駆動電圧Vおよび駆動電流Iの1次成分を示し、V1Re,I1ReはV1,I1の実部、V1Im,I1ImはV1,I1の虚部、そしてjは虚数単位を示す。
【0023】
このとき、LCR共振回路部14のインピーダンスZは次式で表される。
【数2】
ここで、ZReおよびZImはインピーダンスZの実部および虚部を示す。
【0024】
一方、LCR共振回路部14のインピーダンスZは、一般に、上記の検知コイル10のインダクタンスLおよび負荷抵抗R、ならびに共振コンデンサ12の静電容量Cを用いて、次式で表される。
【数3】
ここで、ωはf/2πで表される角速度である(fは駆動周波数と同じ)。
【0025】
すなわち、上記[数2]と[数3]を比較すると、次式が成立する。
【数4】
このとき、ωは1次成分の周波数f(すなわち駆動周波数と同一)を用いて表され(ω=2πf)、Cは共振コンデンサ12の静電容量であり、ともに既知の値である。
【0026】
また、LCR共振回路部14の共振周波数Frは、一般に、検知コイル10のインダクタンスLおよび共振コンデンサ12の静電容量Cを用いて、次式で表される。
【数5】
【0027】
したがって本願発明に係る制御部18は、駆動電圧Vおよび駆動電流Iの1次成分から、[数3]よりインピーダンスZの実部および虚部を求め、[数4]よりLCR共振回路部14の負荷抵抗RおよびインダクタンスLを算出して、さらに算出されたインダクタンスLから、[数5]よりLCR共振回路部14の共振周波数Frを算出することができる。
【0028】
ここで本願発明に係る材質測距センサ1を用いて、さまざまな既知の金属で構成された対象物Tについて、検知コイル10から対象物Tまでの距離を変化させて、LCR共振回路部14の共振周波数Frおよび負荷抵抗Rをあらかじめ算出し、共振周波数Frおよび負荷抵抗Rの関係を示す検知マップ(図3)を作成し、メモリ(記憶部)26に当該検知マップを記憶させる。
【0029】
図3において、材質測距センサ1は、たとえば鉄からなる対象物Tが検知コイル10に最接近したとき(対象物Tと検知コイル10との間の距離dが実質的にゼロであるとき(d=0))、一重丸(○)でプロットされた共振周波数Frおよび負荷抵抗Rを検知し、対象物Tが検知コイル10から無限遠の位置に配置されたとき(dが無限遠)、二重丸(◎)でプロットされた共振周波数Frおよび負荷抵抗Rを検知する。なお、負荷抵抗値Rがゼロとならないのは、負荷抵抗Rが検知コイル10自体の線抵抗RCを含むためである。
【0030】
また対象物Tと検知コイル10との間の距離dを増大させたとき、共振周波数Frおよび負荷抵抗Rの値は、一重丸でプロットされたポイントから、二重丸でプロットされたポイントに向かって推移する。そして本願発明に係る材質測距センサ1を用いて、距離dを変化させたときの共振周波数Frおよび負荷抵抗Rを事前に算出し、これらの値を距離dに関連付けてメモリ26に記憶しておく。
【0031】
同様に、本願発明に係る材質測距センサ1を用いて、対象物Tが磁性ステンレス(□)、非磁性ステンレス(△)、アルミニウム(×)、銅(☆)、およびこれらを任意に組み合わせたさまざまな合金(図示せず)である場合について、数多くの既知の距離dに対する共振周波数Frおよび負荷抵抗Rの値を事前に算出し、同様に距離dの関数としてメモリに記憶しておく。すなわち本願発明に係る材質測距センサ1は、複数の既知の金属材質Mおよび検知コイル10から対象物Tまでの複数の既知の距離dについて事前に検知した共振周波数Frおよび負荷抵抗Rの関係を示す検知マップを記憶するメモリ(記憶部)26を有するものである。
【0032】
そして本願発明に係る材質測距センサ1によれば、実際に、対象物Tの構成金属および対象物までの距離を検知するとき、制御部18は、上述のように共振周波数Frおよび負荷抵抗Rを算出し、これをメモリ26に記憶された共振周波数および負荷抵抗と比較することにより、対象物の構成金属Mおよび検知コイルから対象物までの距離dを検知することができる。
【0033】
より具体的には、検知マップ上の共振周波数Frおよび負荷抵抗Rの複数の(細分化された)ポイントに関する行列{Frij,Rij}について、事前に検知された対象物Tの構成金属および対象物までの距離に関する行列{Mij,dij}をメモリ26に記憶しておく。すなわちメモリ26は、検知マップ上の共振周波数Frおよび負荷抵抗Rのポイントに関する行列{Frij,Rij}により一意的に決定される対象物Tの構成金属および対象物までの距離に関する行列{Mij,dij}を記憶するものである。こうして材質測距センサ1は、実際の対象物Tについて検知された共振周波数と負荷抵抗(Fr,R)を算出し、メモリ26に記憶された検知マップを参照することにより、対応する金属材質と距離(M,d)を直ちに検知することができる。
【0034】
なお、算出される共振周波数と負荷抵抗(Fr,R)は、検知コイル10に対向する対象物Tの大きさ(面積)にも影響されるので、本願発明に係る材質測距センサ1は、対象物Tより十分に小さい検知コイル10を有するものとして構成するか、あるいは検知コイル10が対象物Tより小さいときには、その小さい既知の対象物Tについて事前に検知された共振周波数と負荷抵抗(Fr,R)に対応する金属材質と距離(M,d)をメモリ26に記憶させておくことが好ましい。
【0035】
変形例1.
択一的には、本願発明に係るメモリは、図4に示す検知マップにおいて、対象物Tがさまざまな構成金属について対象物までの距離dがたとえば0mm,1mm,2mm,3mm,・・・,となるポイントを結ぶ曲線C0,C1,C2,C3,・・・,に関する情報(これらの曲線を表す関数として)を記憶しておき、材質測距センサ1による実際の対象物Tの検知で算出された共振周波数と負荷抵抗(Fr,R)に基づいて、対象物Tまでの距離dを直ちに検知するようにしてもよい。
たとえば、対象物Tについて実際に算出された共振周波数と負荷抵抗(Fr,R)について検知マップ上でプロットしたポイント(図4の星印で示す)が、距離dが2mmとなるポイントを結ぶ曲線C2上にあることから、対象物Tまでの距離dが2mmであることを直ちに検知することができる。
【0036】
また金属材質Mに関しては、曲線C0上の複数のポイントに対応するもののみ、メモリ26に記憶しておく。そして算出された共振周波数と負荷抵抗(Fr,R)は、上記二重丸で示す無限遠ポイントから直線的に推移すると仮定し、実際に算出された共振周波数と負荷抵抗(Fr,R)のポイント(星印)と上記二重丸で示す無限遠ポイントとを結ぶ直線(長い破線で示す)と、距離dが0mmとなるポイントを結ぶ曲線C0との交点を求め、この交点における共振周波数と負荷抵抗(Fr,R)に対応する金属材質Mをメモリ26から読み出すことにより、対象物Tの構成金属Mを簡便に推知することができる。
【0037】
このように変形例1に係る材質測距センサ1によれば、対象物までの距離dが所定の距離となるポイントを結ぶ曲線Ciに関する情報と、曲線C0上の複数のポイントに対応する金属材質Mに関する情報とを記憶することにより、実際の対象物Tについて算出された共振周波数と負荷抵抗(Fr,R)に基づいて、対応する金属材質と距離(M,d)を直ちに検知することができる。
すなわち変形例1に係るメモリ26は、実施の形態1のように、検知マップ上の細分化された膨大な数の共振周波数と負荷抵抗(Fr,R)のポイントに対する金属材質と距離(M,d)のデータ(行列{Frij,Rij}に対応する行列{Mij,dij})を記憶する必要がない。したがって変形例1に係る材質測距センサ1によれば、対象物Tに関する共振周波数と負荷抵抗(Fr,R)に対応する金属材質と距離(M,d)について事前に検知する労力を実質的に省略することが可能であり、より小さい容量を有するメモリ26を用いることが可能であるので、製造コストを大幅に削減することができる。
【0038】
変形例2.
さらに択一的には、図5に示すように、この検知マップ上の仮想的な距離hと、検知コイル10から対象物Tまでの実際の距離dとの間に図6のグラフに示すような関係があると仮定することにより、検知コイル10から対象物Tまでの距離dを簡便に推知するようにしてもよい。
たとえば図5の検知マップにおいて、算出された共振周波数と負荷抵抗(Fr,R)と無限遠ポイント(Fr0,R0)との仮想的距離hを以下のように定義する。
【数6】
【0039】
図6は、検知マップ上の無限遠ポイント(Fr0,R0)から対象物Tまでの仮想的距離hと、検知コイル10から対象物Tまでの実際の距離dとの関係を示すグラフである。図6に示すように、仮想的距離hは、対象物Tから検知コイル10までの実際の距離dが実質的にゼロとなったとき、共振周波数と負荷抵抗(Fr,R)は最大となり、対象物Tが検知コイル10から遠ざかるにつれて(すなわち実際の距離dが大きくなるにつれて)、共振周波数と負荷抵抗(Fr,R)は無限遠ポイント(Fr0,R0)に向かって小さくなり、仮想的距離hも小さくなる。換言すると、仮想的距離hが小さくなるほど、対象物Tまでの実際の距離dは指数関数的に(または非線形的に)増大する。
【0040】
たとえば対象物Tについて実際に算出された共振周波数と負荷抵抗(Fr,R)が図5の検知マップ上の星印で示すポイントでプロットされるとき、仮想的距離hに対応する実際の距離dを図6のグラフから読み取ることができる。また図6のグラフを規定する試行関数を事前に定義してメモリ26に記憶しておくことにより、算出された共振周波数と負荷抵抗(Fr,R)から直ちに実際の距離dを算出することができる。
【0041】
また金属材質Mに関しては、変形例1と同様、曲線C0上の複数のポイントに対応する金属材質Mのみをメモリ26に記憶しておき、実際に算出された共振周波数と負荷抵抗(Fr,R)のポイント(星印)と上記二重丸で示す無限遠ポイントとを結ぶ直線(長い破線で示す)と、距離dが0mmとなるポイントを結ぶ曲線C0との交点を求め、この交点における金属材質Mをメモリ26から読み出すことにより、対象物Tの構成金属Mを推知することができる。
【0042】
このように変形例2によれば、図6のグラフに示す試行関数を表す情報と、曲線C0上の複数のポイントに対応する金属材質Mに関する情報とを記憶することにより、算出された共振周波数と負荷抵抗(Fr,R)に対応する距離dを事前に検知して記憶するまでもなく、算出された共振周波数と負荷抵抗(Fr,R)から構成金属と距離(M,d)を極めて簡便な手法で推知することができる。よって、変形例2に係る材質測距センサ1によれば、変形例1に比して、既知の対象物Tについて事前に算出された共振周波数と負荷抵抗(Fr,R)に対応する距離dをあらかじめ記憶しておく必要がなく、よりいっそう小さい容量を有するメモリ26を用いて、製造コストをさらに削減することができる。
【0043】
以上のように本願発明に係る材質測距センサ1は、1次成分抽出手段24(またはn次成分抽出手段)を用いて、瞬時に(駆動周波数が10kHzのとき0.1m秒で)LCR共振回路部14の駆動電圧Vおよび駆動電流Iを抽出し、抽出された駆動電圧Vおよび駆動電流Iに基づいてLCR共振回路部14の共振周波数と負荷抵抗(Fr,R)を算出する。そして本願発明に係る材質測距センサ1は、算出された共振周波数と負荷抵抗(Fr,R)を、メモリ26に記憶された構成金属と距離(M,d)を関連付けた事前検知の共振周波数と負荷抵抗(Fr,R)と比較することにより、対象物Tの構成金属と距離(M,d)を極めて迅速に検知することができる。
【0044】
なお、本願発明に係る材質測距センサ1は、上述のように、対象物Tの構成金属および距離(M,d)の両方を検知することができるが、単に対象物Tまでの距離(d)のみを検知する測距センサとしても利用することができ、あるいは対象物Tの構成金属(M)を専ら検知する近接センサまたは材質センサとして活用することができる。
【0045】
実施の形態2.
図7を参照しながら、本願発明に係る材質測距センサの実施の形態2について以下に説明する。実施の形態2に係る材質測距センサ2は、その駆動電流検出手段22が共振コンデンサ12の両端のコンデンサ電圧を検出するコンデンサ電圧検出手段28を有し、コンデンサ電圧VCからLCR共振回路部14に流れる駆動電流Iを検出する点を除いて、実施の形態1の材質測距センサ1と同様の構成を有するので、その他の構成部品に関連する詳細な説明を省略する。なお図中、同一の構成部品については同一の符号を用いて示す。
【0046】
図7は、実施の形態2に係る材質測距センサ2の概略的な電気的構成を示す、図1と同様の回路ブロック図である。実施の形態1に係る材質測距センサ1は、シャント抵抗と増幅アンプ、またはカレントトランスと負荷抵抗等で構成された駆動電流検出手段22を用いて、LCR共振回路部14に流れる駆動電流Iを検出するものであった。しかしながら、こうしたカレントトランスは高価であり、シャント抵抗は抵抗値が低いものの大電流が流れると発熱して相当の電力損失が生じる。そこで実施の形態2に係る材質測距センサ2によれば、図7に示すように、コンデンサ電圧検出手段28を用いて、共振コンデンサ12の両端のコンデンサ電圧VCを検出し、コンデンサ電圧VCからLCR共振回路部14に流れる駆動電流Iを検出する。
この文脈において、実施の形態2に係る駆動電流検出手段22は、共振コンデンサ12の両端のコンデンサ電圧VCを検出するコンデンサ電圧検出手段28を有し、コンデンサ電圧VCからLCR共振回路部14に流れる駆動電流Iを検出するものである。
【0047】
より具体的に説明すると、コンデンサ電圧VCは、駆動電圧検出手段20が検出する駆動電圧Vと同様、駆動周波数の自然数倍の高次周波数成分を含み、1次成分抽出手段24を用いて離散フーリエ変換することにより、コンデンサ電圧VCの1次成分VC1(駆動周波数と同一の周波数を有する成分)のみを抽出し、複素表示することができる。そしてコンデンサ電圧VCの1次成分VC1と駆動電流I1とは、次の関係式を満たす。
【数7】
ここでωはf/2πで表される角速度である(fは駆動周波数と同じ)、Cは共振コンデンサ12の静電容量であり、ともに既知の値である。
【0048】
こうして、実施の形態2に係る材質測距センサ2は、コンデンサ電圧検出手段28を用いてコンデンサ電圧VCを検出し、1次成分抽出手段24を用いてコンデンサ電圧VCの1次成分VC1を抽出し、制御部18により[数7]を求めることにより、実施の形態1に係る材質測距センサ1と同様、LCR共振回路部14の駆動電流I1を算出することができる。すなわち、実施の形態2に係る材質測距センサ2は、高価なカレントトランスや、電力損失が大きいシャント抵抗を用いることなく、安価で、かつ信頼性の高い駆動電流検出手段22を用いて、駆動電流I1を算出することができる。
【0049】
実施の形態2に係る材質測距センサ2は、LCR共振回路部14の駆動電流I1および駆動電圧Vを求めた後は、実施の形態1と同様に、LCR共振回路部14の負荷抵抗Rおよび共振周波数Frを算出し、メモリ26に記憶された検知マップを参照することにより、対象物Tを構成する金属および対象物Tまでの距離(M,d)を極めて迅速に検知することができる。
また、実施の形態2に係る材質測距センサ2は、実施の形態1と同様、対象物Tの構成金属および距離(M,d)の両方を検知できるが、いずれか一方を検知する測距センサまたは近接センサ(材質センサ)として利用することもできる。
【0050】
なお、コンデンサ電圧VCは、特に共振点近くにおいて高くなるので、駆動電圧検出手段20で用いられる共振コンデンサ12は、耐圧の高いものを利用することが好ましい。あるいはコンデンサ電圧VCが極めて高い場合には、コンデンサ電圧検出手段28は、これを分圧して、分圧されたコンデンサ電圧を検出してもよい。
さらに付言すると、実施の形態2においても、実施の形態1と同様、1次成分抽出手段24の代わりに、n次成分抽出手段(図示せず)を用いて、駆動周波数のn倍と周波数成分を有するn次成分VCnを抽出し、制御部18は[数7]からn次成分の駆動電流Inを算出するようにしてもよい。
【0051】
実施の形態3.
図8〜図10を参照しながら、本願発明に係る材質測距センサの実施の形態3について以下に説明する。実施の形態3に係る材質測距センサ3は、概略、検知マップ上の検知領域DRと非検知領域NRを設定できる点を除いて、実施の形態1の材質測距センサ1と同様の構成を有するので、その他の構成部品に関連する詳細な説明を省略する。なお図中、同一の構成部品については同一の符号を用いて示す。
【0052】
図8は、実施の形態3に係る材質測距センサ3の概略的な電気的構成を示す、図1と同様の回路ブロック図である。図9および図10は、実施の形態3に係るメモリ26に事前に記憶された共振周波数および負荷抵抗(Fr,R)に関する検知マップである。
図8に示す材質測距センサ3は、メモリ26で記憶された検知マップ上において、検知領域DRおよび非検知領域NRをユーザにより設定できる入力手段30を有する。そして実施の形態3に係る制御部18は、算出された共振周波数Frおよび負荷抵抗Rが検知マップ上の検知領域DRに含まれる場合に限り、対象物Tを構成する材質Mまたは検知コイルから対象物までの距離d、あるいは両方を検知するものである。
【0053】
たとえばユーザが入力手段30を用いて、メモリ26に記憶された検知マップにおいて、図9に示すような検知閾値ライン(図9の一点鎖線で示す)により検知領域DRおよび非検知領域NRを画定してもよい。なお入力手段30は、当業者により広く知られた任意の入力装置を用いることができ、たとえば手書き入力を可能とするグラフィックデバイスインターフェイス(GDI)を有するタッチパネルであってもよいし、単に数値閾値を入力するテンキーであってもよい。
【0054】
入力手段30を用いて、図9に示す検知領域DRおよび非検知領域NRが設定されたとき、実施の形態3の制御部18は、対象物Tが磁性ステンレスおよび鉄等の磁性金属で構成される場合には、算出される共振周波数Frおよび負荷抵抗Rが非検知領域NRに属するので対象物Tを検知しない。他方、制御部18は、対象物Tが非磁性ステンレス、アルミニウム、および銅またはこれらの合金等の非磁性金属で構成される場合には、算出された共振周波数Frおよび負荷抵抗Rが検知マップ上の検知領域DRに含まれるので、これらの特定の材質からなる対象物Tに限定して、対象物Tまでの距離dを検知する。したがって、図9に示す検知領域DRおよび非検知領域NRが設定された検知マップを有する材質測距センサ3は、専ら特定の非磁性金属(M)で構成された対象物Tまでの距離dを検知する近接センサまたは材質センサとして利用することができる。
【0055】
同様に、入力手段30を用いて、図10に示す検知領域DRおよび非検知領域NRが設定されたとき、実施の形態3の制御部18は、磁性金属に対しては距離dがより広い範囲にある対象物Tを検知するのに対し、非磁性金属に対しては距離dがより狭い範囲にある対象物Tを検知する。したがって、図10に示す検知領域DRおよび非検知領域NRが設定された検知マップを有する材質測距センサ3は、磁性金属の対象物Tに対する距離dについては、より高い感度で検知し、非磁性金属の対象物Tに対する距離dについては、比較的に低い感度で検知する測距センサとして利用することができる。
【0056】
上記説明したように、実施の形態3に係る材質測距センサ3は、検知マップ上の検知領域DRと非検知領域NRを任意に設定できる入力手段30を有するので、特定の構成材料からなる金属対象物Tに限定して検知する近接センサ(または材質センサ)、または構成材料に応じて異なる精度で対象物Tまでの距離dを検知する測距センサとして利用することができる。このように実施の形態3に係る材質測距センサ3は、用途に応じてユーザにより感度特性を任意に設定できる、極めて汎用性が高いセンサとして利用することができる。
【0057】
なお、実施の形態3の入力手段30は、検知マップ上の検知領域DRおよび非検知領域NRを、ユーザ側で任意に設定できるものとして説明したが、メーカ側で設定できるものであってもよい。
さらに択一的には、メーカが事前に設定した検知領域DRおよび非検知領域NRを、既知の対象物Tについて事前に検知された共振周波数と負荷抵抗(Fr,R)に対する金属材質と距離(M,d)とともに、メモリ26内に記憶させて、特定の用途を有する材質測距センサ1としてユーザに提供してもよい。すなわち実施の形態3の材質測距センサ1は、入力手段30を有さず、これに内蔵されたメモリ26に、検知領域DRと非検知領域NRを事前に記憶させておいてもよい。
【0058】
実施の形態4.
図11を参照しながら、本願発明に係る材質測距センサの実施の形態4について以下に説明する。実施の形態4に係る材質測距センサ4は、概略、算出された負荷抵抗Rおよび抽出された駆動電流Iに基づいて、検知コイル10が電磁誘導により対象物Tに与えた電力量Qを算出する電力量算出手段32をさらに有する点を除いて、実施の形態1の材質測距センサ1と同様の構成を有するので、その他の構成部品に関連する詳細な説明を省略する。なお図中、同一の構成部品については同一の符号を用いて示す。
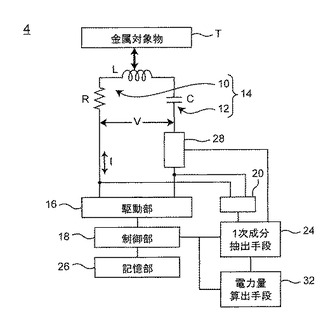
【0059】
図11は、実施の形態4に係る材質測距センサ4の概略的な電気的構成を示す、図1と同様の回路ブロック図である。図11に示す材質測距センサ4は、制御部18と、1次成分抽出手段(またはn次成分抽出手段)24とに電気的に接続された電力量算出手段32を有する。この電力量算出手段32は、制御部18で算出された負荷抵抗Rと、1次成分抽出手段24で抽出された駆動電流Iとに基づいて、検知コイル10が電磁誘導により対象物Tに与えた電力量Q(すなわち対象物Tの発熱量)を算出するものである。
【0060】
上述のように、負荷抵抗Rは、金属対象物Tが無限遠に配置されているときの検知コイル10自体の線抵抗RCに、金属対象物Tが近接配置されたことによる金属対象物Tの見かけ上の負荷抵抗RLを加えたものに相当する(R=RC+RL)。
このとき、検知コイル10が電磁誘導により対象物Tに与えた電力Wは、次式で算出することができる。
【数8】
ここで、I1*はI1の共役複素数を示す。また検知コイル10が電磁誘導により対象物Tに与えた電力量Qは、検知コイル10が電磁誘導により対象物Tに与えた電力Wを所定期間積分したものである。したがって、実施の形態4の電力量算出手段32は、制御部18で算出された負荷抵抗R(金属対象物Tの見かけ上の負荷抵抗RL)と、1次成分抽出手段24(またはn次成分抽出手段)で抽出された駆動電流Iとに基づいて、[数8]より検知コイル10が電磁誘導により対象物Tに与えた電力量Q(電力W)、すなわち対象物Tの発熱量を算出することができる。
【0061】
そして実施の形態4に係る制御部18は、算出された電力量Qが所定の閾値電力量Qthを越えたとき(Q>Qth)、対象物Tに過剰な電力量Qが供給されたと判断して、LCR共振回路部14に対する高周波電流の供給を停止または低減するように駆動部16を制御するものである。
たとえば対象物Tが検知コイル10に近接した状態で長時間放置されたとき、検知コイル10による誘導加熱で対象物Tが過剰に加熱される場合があるが、実施の形態4によれば、電力量算出手段32で算出された対象物Tの発熱量(電力量Q)を常時モニタし、これが閾値電力量Qthを越えたとき、LCR共振回路部14に対する高周波電流の供給を停止または低減することにより、対象物Tの過剰な発熱を未然に防止することができる。
【0062】
金属対象物Tの見かけ上の負荷抵抗RLは、一般に、金属対象物Tの温度とともに増大する傾向があり、対象物Tが過熱されると、負荷抵抗Rの算出、ひいては対象物Tの構成金属および対象物Tまでの距離(M,d)にも影響を与え得る。しかしながら、実施の形態4によれば、上述のように、対象物Tが過熱されることを防止して、高い精度を維持しつつ、対象物Tの構成材質または対象物Tまでの距離、あるいは両方を検知することができる。
【0063】
なお、制御部18は、算出された対象物Tの発熱量(電力量Q)が閾値電力量Qthを越えたと判断した後、算出された対象物Tまでの距離dが再び無限遠になった(または所定の距離以上離れた)ことを検知したとき、別の対象物Tについて構成材質または距離(M,d)を測定するために、それまで行っていた発熱量(電力量Q)の演算をリセットすることが好ましい。
【符号の説明】
【0064】
1〜4:材質測距センサ、10:検知コイル、12:共振コンデンサ、14:LCR共振回路部、16:駆動部、18:制御部、20:駆動電圧検出手段、22:駆動電流検出手段、24:1次成分抽出手段(n次成分抽出手段)、26:メモリ(記憶部)、28:コンデンサ電圧検出手段、30:入力手段、32:電力量算出手段、T:対象物。
【特許請求の範囲】
【請求項1】
対象物を構成する金属ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知するセンサであって、
検知コイルおよび共振コンデンサからなるLCR共振回路部と、
前記LCR共振回路部に所定の周波数を有する高周波電流を供給するための駆動部と、
前記LCR共振回路部の両端に印加される駆動電圧を検出する駆動電圧検出手段と、
前記LCR共振回路部に流れる駆動電流を検出する駆動電流検出手段と、
検出された駆動電圧および駆動電流から、前記所定の周波数のn倍(nは自然数)の周波数を有するn次成分を含むn次駆動電圧およびn次駆動電流を抽出するn次成分抽出手段と、
n次駆動電圧およびn次駆動電流から、前記LCR共振回路部の共振周波数および負荷抵抗を算出する制御部と、
複数の既知の対象物を構成する金属および複数の既知の検知コイルから対象物までの距離について事前に検知した共振周波数と負荷抵抗との関係を示す検知マップを記憶する記憶部とを備え、
前記制御部は、算出された共振周波数および負荷抵抗と、前記記憶部で記憶された共振周波数および負荷抵抗とを比較することにより、対象物を構成する金属ならびに前記検知コイルから対象物までの距離のうちの少なくとも一方を検知することを特徴とするセンサ。
【請求項2】
駆動電流検出手段は、共振コンデンサの両端のコンデンサ電圧を検出するコンデンサ電圧検出手段を有し、コンデンサ電圧からLCR共振回路部に流れる駆動電流を検出することを特徴とする請求項1に記載のセンサ。
【請求項3】
記憶部に接続され、記憶された共振周波数および負荷抵抗について、検知マップ上の検知領域と非検知領域をユーザにより設定可能な入力手段をさらに有し、
制御部は、算出された共振周波数および負荷抵抗が検知領域に含まれる場合に限り、対象物を構成する材質ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知することを特徴とする請求項1または2に記載のセンサ。
【請求項4】
記憶部は、記憶された共振周波数および負荷抵抗について、検知マップ上の検知領域と非検知領域を記憶し、
制御部は、算出された共振周波数および負荷抵抗が検知領域に含まれる場合に限り、対象物を構成する材質ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知することを特徴とする請求項1または2に記載のセンサ。
【請求項5】
算出された負荷抵抗および抽出されたn次駆動電流に基づいて、検知コイルが電磁誘導により対象物に与えた電力量を算出する電力量算出手段をさらに有し、
制御部は、算出された電力量が所定の閾値電力量を越えたとき、LCR共振回路部に対する高周波電流の供給を停止または低減するように駆動部を制御することを特徴とする請求項1〜4のいずれか1に記載のセンサ。
【請求項6】
対象物を構成する金属ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知する方法であって、
検知コイルおよび共振コンデンサからなるLCR共振回路部に所定の周波数を有する高周波電流を供給するステップと、
前記LCR共振回路部の両端に印加される駆動電圧を検出するステップと、
前記LCR共振回路部に流れる駆動電流を検出するステップと、
検出された駆動電圧および駆動電流から、所定の周波数のn倍(nは自然数)の周波数を有するn次成分を含むn次駆動電圧およびn次駆動電流を抽出するステップと、
n次駆動電圧およびn次駆動電流から、前記LCR共振回路部の共振周波数および負荷抵抗を算出するステップと、
複数の既知の対象物を構成する金属および複数の既知の検知コイルから対象物までの距離について事前に検知した共振周波数と負荷抵抗との関係を示す検知マップを記憶するステップと、
算出された共振周波数および負荷抵抗と、記憶された共振周波数および負荷抵抗とを比較することにより、対象物を構成する金属ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知するステップとを有するたことを特徴とする方法。
【請求項7】
駆動電流を検出するステップは、共振コンデンサの両端のコンデンサ電圧を検出し、コンデンサ電圧からLCR共振回路部に流れる駆動電流を検出することを特徴とする請求項6に記載の方法。
【請求項8】
記憶された共振周波数および負荷抵抗について、検知マップ上の検知領域と非検知領域を設定するステップと、
算出された共振周波数および負荷抵抗が検知領域に含まれる場合に限り、対象物を構成する材質ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知することを特徴とする請求項6または7に記載の方法。
【請求項9】
記憶された共振周波数および負荷抵抗について、検知マップ上の検知領域と非検知領域を記憶するステップと、
算出された共振周波数および負荷抵抗が検知領域に含まれる場合に限り、対象物を構成する材質ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知することを特徴とする請求項6または7に記載の方法。
【請求項10】
算出された負荷抵抗および抽出されたn次駆動電流に基づいて、検知コイルが電磁誘導により対象物に与えた電力量を算出するステップと、
算出された電力量が所定の閾値電力量を越えたとき、LCR共振回路部に対する高周波電流の供給を停止または低減するステップとを有することを特徴とする請求項6〜9のいずれか1に記載の方法。
【請求項1】
対象物を構成する金属ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知するセンサであって、
検知コイルおよび共振コンデンサからなるLCR共振回路部と、
前記LCR共振回路部に所定の周波数を有する高周波電流を供給するための駆動部と、
前記LCR共振回路部の両端に印加される駆動電圧を検出する駆動電圧検出手段と、
前記LCR共振回路部に流れる駆動電流を検出する駆動電流検出手段と、
検出された駆動電圧および駆動電流から、前記所定の周波数のn倍(nは自然数)の周波数を有するn次成分を含むn次駆動電圧およびn次駆動電流を抽出するn次成分抽出手段と、
n次駆動電圧およびn次駆動電流から、前記LCR共振回路部の共振周波数および負荷抵抗を算出する制御部と、
複数の既知の対象物を構成する金属および複数の既知の検知コイルから対象物までの距離について事前に検知した共振周波数と負荷抵抗との関係を示す検知マップを記憶する記憶部とを備え、
前記制御部は、算出された共振周波数および負荷抵抗と、前記記憶部で記憶された共振周波数および負荷抵抗とを比較することにより、対象物を構成する金属ならびに前記検知コイルから対象物までの距離のうちの少なくとも一方を検知することを特徴とするセンサ。
【請求項2】
駆動電流検出手段は、共振コンデンサの両端のコンデンサ電圧を検出するコンデンサ電圧検出手段を有し、コンデンサ電圧からLCR共振回路部に流れる駆動電流を検出することを特徴とする請求項1に記載のセンサ。
【請求項3】
記憶部に接続され、記憶された共振周波数および負荷抵抗について、検知マップ上の検知領域と非検知領域をユーザにより設定可能な入力手段をさらに有し、
制御部は、算出された共振周波数および負荷抵抗が検知領域に含まれる場合に限り、対象物を構成する材質ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知することを特徴とする請求項1または2に記載のセンサ。
【請求項4】
記憶部は、記憶された共振周波数および負荷抵抗について、検知マップ上の検知領域と非検知領域を記憶し、
制御部は、算出された共振周波数および負荷抵抗が検知領域に含まれる場合に限り、対象物を構成する材質ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知することを特徴とする請求項1または2に記載のセンサ。
【請求項5】
算出された負荷抵抗および抽出されたn次駆動電流に基づいて、検知コイルが電磁誘導により対象物に与えた電力量を算出する電力量算出手段をさらに有し、
制御部は、算出された電力量が所定の閾値電力量を越えたとき、LCR共振回路部に対する高周波電流の供給を停止または低減するように駆動部を制御することを特徴とする請求項1〜4のいずれか1に記載のセンサ。
【請求項6】
対象物を構成する金属ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知する方法であって、
検知コイルおよび共振コンデンサからなるLCR共振回路部に所定の周波数を有する高周波電流を供給するステップと、
前記LCR共振回路部の両端に印加される駆動電圧を検出するステップと、
前記LCR共振回路部に流れる駆動電流を検出するステップと、
検出された駆動電圧および駆動電流から、所定の周波数のn倍(nは自然数)の周波数を有するn次成分を含むn次駆動電圧およびn次駆動電流を抽出するステップと、
n次駆動電圧およびn次駆動電流から、前記LCR共振回路部の共振周波数および負荷抵抗を算出するステップと、
複数の既知の対象物を構成する金属および複数の既知の検知コイルから対象物までの距離について事前に検知した共振周波数と負荷抵抗との関係を示す検知マップを記憶するステップと、
算出された共振周波数および負荷抵抗と、記憶された共振周波数および負荷抵抗とを比較することにより、対象物を構成する金属ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知するステップとを有するたことを特徴とする方法。
【請求項7】
駆動電流を検出するステップは、共振コンデンサの両端のコンデンサ電圧を検出し、コンデンサ電圧からLCR共振回路部に流れる駆動電流を検出することを特徴とする請求項6に記載の方法。
【請求項8】
記憶された共振周波数および負荷抵抗について、検知マップ上の検知領域と非検知領域を設定するステップと、
算出された共振周波数および負荷抵抗が検知領域に含まれる場合に限り、対象物を構成する材質ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知することを特徴とする請求項6または7に記載の方法。
【請求項9】
記憶された共振周波数および負荷抵抗について、検知マップ上の検知領域と非検知領域を記憶するステップと、
算出された共振周波数および負荷抵抗が検知領域に含まれる場合に限り、対象物を構成する材質ならびに検知コイルから対象物までの距離のうちの少なくとも一方を検知することを特徴とする請求項6または7に記載の方法。
【請求項10】
算出された負荷抵抗および抽出されたn次駆動電流に基づいて、検知コイルが電磁誘導により対象物に与えた電力量を算出するステップと、
算出された電力量が所定の閾値電力量を越えたとき、LCR共振回路部に対する高周波電流の供給を停止または低減するステップとを有することを特徴とする請求項6〜9のいずれか1に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−112751(P2012−112751A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−260989(P2010−260989)
【出願日】平成22年11月24日(2010.11.24)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000176866)三菱電機ホーム機器株式会社 (1,201)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月24日(2010.11.24)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000176866)三菱電機ホーム機器株式会社 (1,201)
【Fターム(参考)】
[ Back to top ]