
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、対象物体の検出方法、検出装置及びプログラムに係り、詳しくは対象物体を計測または撮像することで得た対象物体の形状データに基づき、仮想空間座標にて対象物体を検出する方法、装置及びプログラムに関する。
【背景技術】
【0002】
従来、対象体を検出する方法として、対象体の撮像または計測点から対象体までの距離を計測することにより、対象体の形状データを取得する方法がある。当該形状データに基づいて、2次元または3次元の仮想空間座標における対象体が占める対象体領域を生成することにより、対象体の形状を仮想座標空間で表現する。
しかしながら、3次元の仮想座標空間では、計測時や撮像時等におけるノイズ等により、上述のように生成された対象体領域の境界付近に不明瞭な形状部分が生じるという問題がある。
【0003】
そこで、3次元画像において、物体境界画素に対し球体を逐次当てはめていき、物体と球体との重なる割合により、その着目画素を抽出するかどうかを判定する方法が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3888975号
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、対象体を3次元の点群として計測する場合、計測した形状データにおける球体と背景との境界付近を補正する必要がある。
この点、上記特許文献1に開示された従来技術は、コンピュータ断層撮影装置(CT装置)の3次元画像を構成するボクセルデータに対して画素の抽出処理を行うものであり、対象体を3次元の点群として計測した場合には、当該点群に対して従来技術を適用できないという問題がある。
【0006】
また、別の補正方法として最小自乗法、領域分割、及びハフ変換を用いる方法等が知られているが、最小自乗法では、3次元の点群を構成する計測点にノイズ等の外れ点が存在する場合、球体の検出精度が低下してしまうため好ましくない。
そして、領域分割では、計測データの誤差やノイズなどの影響により領域分割を誤り、同一の球体を重複して検出したり、検出した球体の位置が偏ったりして、領域分割の精度が低下してしまうという問題がある。
【0007】
さらに、ハフ変換を使用する場合、特徴点を保存するために多くのメモリを必要とし、また計算量が大きくなるため、球体の算出に多くの時間を要するので好ましくない。
本発明は、上述した課題を解決すべくなされたものであり、その目的とするところは、対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法、検出装置及びプログラムを提供することにある。
【課題を解決するための手段】
【0008】
上記の目的を達成するべく、請求項1の対象物体の検出方法は、計測対象となる対象物体の形状を仮想座標空間において表現する対象物体の検出方法であって、3次元計測手段から3次元の計測点群として対象物体の形状データを取得する形状データ取得ステップと、前記形状データから生成された仮想座標空間において前記対象物体が占める対象体領域を、前記計測点群の各計測点の付加情報に従って複数の対象体領域に区画する領域分割ステップと、前記分割された各対象体領域の中から前記対象物体と推定される推定領域を抽出する対象物体領域抽出ステップと、前記推定領域毎に推定される単数又は複数の推定対象物体を生成し、該推定対象物体の中から前記対象物体と認識される推定対象物体を認識対象物体として選択する対象物体認識ステップと、を備えたことを特徴とする。
【0009】
請求項2の対象物体の検出方法では、請求項1において、前記形状データ取得ステップの後から前記対象物体認識ステップの前までの間に、前記形状データ取得ステップで取得した前記計測点群の各計測点における法線ベクトルと、該各計測点と前記3次元計測手段の位置である視点に向かうベクトルとのなす角度が前記対象物体の側面と判定される閾値より大きい場合に、該当する計測点を除外する側面除外ステップをさらに備えることを特徴とする。
【0010】
請求項3の対象物体の検出方法では、請求項2において、前記側面除外ステップは、前記計測点群における前記対象物体の側面を除外する範囲に計測点が存在する場合に、前記閾値より大きい角度となる計測点を除外するものであり、前記計測点群の全てに対して前記角度の判定が行われた後、残った計測点から形成される形状が、前記対象物体に相当する形状であることを判定するステップを有することを特徴とする。
【0011】
請求項4の対象物体の検出方法では、請求項1乃至3のいずれかにおいて、前記対象物体領域抽出ステップは、前記領域分割ステップにて区画された前記複数の対象体領域の中で、同一の対象体領域における計測点数または面積が前記対象物体と推定される閾値の範囲内の場合、または前記同一の対象体領域における計測点を全て含む幾何学的形状の大きさが前記対象物体と推定される閾値の範囲内の場合に、該当する対象体領域を対象物体と推定される領域として抽出することを特徴とする。
【0012】
請求項5の対象物体の検出方法では、請求項1乃至4のいずれかにおいて、前記認識対象物体のうち、誤認識した対象物体を不正対象物体として削除する不正対象物体削除ステップを備えることを特徴とする。
【0013】
請求項6の対象物体の検出方法では、請求項5において、前記対象物体の表面積が前記対象体である対象物体の表面積と判定される範囲外である場合に、該当する対象物体を削除する表面積判定ステップを含むことを特徴とする。
【0014】
請求項7の対象物体の検出方法では、請求項5において、前記対象物体は球体であって、前記不正対象物体削除ステップは、各球体の中心座標間の距離を算出し、該距離が同一の球体と判定される閾値より短い場合に、該当する球体を削除する重複球判定ステップを含むことを特徴とする。
【0015】
請求項8の対象物体の検出方法では、請求項5において、前記対象物体は球体であって、前記不正対象物体削除ステップは、前記球体の中心から前記球体の半径より短い前記球体の内部の範囲に計測点が存在する場合に、該当する球体を削除する球体内計測点判定ステップを含むことを特徴とする。
ここで、3次元計測手段のセンサのノイズは、滑らかな球体の表面では一般に正規分布となり安定したものとなるため、球体の内側に計測点が存在することはない。しかし、球体が遠方方向にある場合、または検出する球体が小さい場合には、上記対象体認識ステップで球体の位置を誤ることがある。請求項8の球体の検出方法は、この原理に基づいて行われる。
【0016】
請求項9の対象物体の検出装置は、計測対象となる対象物体の形状を仮想座標空間において表現する対象物体の検出装置であって、3次元計測手段から3次元の計測点群として対象物体の形状データを取得する形状データ取得手段と、前記形状データから生成された仮想座標空間において前記対象物体が占める対象体領域を、前記計測点群の各計測点の付加情報に従って複数の対象体領域に区画する領域分割手段と、前記分割された各対象体領域の中から前記対象物体と推定される推定領域を抽出する対象物体領域抽出手段と、前記推定領域毎に推定される単数又は複数の推定対象物体を生成し、該推定対象物体の中から前記対象物体と認識される推定対象物体を認識対象物体として選択する対象物体認識手段と、を備えたことを特徴とする。
【0017】
請求項10の対象物体の検出装置では、請求項9において、前記形状データ取得手段で取得した前記計測点群の各計測点における法線ベクトルと、該各計測点と前記3次元計測手段の位置である視点に向かうベクトルとのなす角度が前記対象物体の側面と判定される閾値より大きい場合に、該当する計測点を除外する側面除外手段をさらに備えることを特徴とする。
【0018】
請求項11の対象物体の検出装置では、請求項10において、前記側面除外手段は、前記計測点群における前記対象物体の側面を除外する範囲に存在する計測点に対して、前記閾値より大きい角度となる計測点を除外することを特徴とする。
【0019】
請求項12のプログラムは、コンピュータを、3次元計測手段から3次元の計測点群として測定対象となる対象物体の形状データを取得する形状データ取得手段、前記形状データから生成された仮想座標空間において前記対象物体が占める対象体領域を、前記計測点群の各計測点の付加情報に従って複数の対象体領域に区画する領域分割手段、前記分割された各対象体領域の中から前記対象物体と推定される推定領域を抽出する対象物体領域抽出手段、前記推定領域毎に推定される単数又は複数の推定対象物体を生成し、該推定対象物体の中から前記対象物体と認識される推定対象物体を認識対象物体として選択する対象物体認識手段、として機能させる。
【発明の効果】
【0020】
本発明の対象物体の検出方法によれば、3次元計測手段から取得された形状データを複数の対象体領域に区画し、その中から対象物体と推定される推定領域を抽出し、推定領域毎に推定された推定対象物体の中から対象物体として認識される対象物体を選択する。
本発明の対象物体の検出装置によれば、上述した対象物体の検出方法と同様の作用効果が得られる。
【0021】
これにより、仮想座標空間における計測点群の中で検出する対象物体に相当する位置を推定することができ、対象物体と推定される推定領域に対して対象物体の認識を行い検出することにより、計算量をより少なくすることができ、各計測点のうちノイズ等による外れ点を除外することができるので、より高速且つ高精度に対象物体を認識することができる。
【0022】
本発明の対象物体の検出装置によれば、上述した対象物体の検出方法と同様の作用効果が得られる。
【0023】
本発明のプログラムによれば、このプログラムを実行可能なコンピュータを備えた対象物体の検出装置において、上述した対象物体の検出方法と同様の作用効果が得られる。
【図面の簡単な説明】
【0024】
【図1】本発明の実施形態に供試される対象体認識装置の概略構成図である。
【図2】本発明に係る対象体検出方法のフローチャートである。
【図3】形状データ取得ステップを示すフローチャートである。
【図4】三角形メッシュ作成後に得られる形状の一例を示す図である。
【図5】対象体検出方法における対象体推定ルーチンを示すフローチャートである。
【図6】(A)は3次元計測手段で球体を計測して検出処理を行う際に出現する側面の例を示す図、(B)は各計測点の法線ベクトルと各計測点から視点方向へのベクトルとのなす角度を示す図である。
【図7】図5に示す対象体推定ルーチンにおいて行われる側面除外ステップを示すフローチャートである。
【図8−1】図5に示す対象体推定ルーチンにおいて行われる領域分割ステップを示すフローチャートである。
【図8−2】図5に示す対象体推定ルーチンにおいて行われる領域分割ステップを示すフローチャートである。
【図9】対象体に対して生成された複数の対象体領域を示す図である。
【図10】図5に示す対象体推定ルーチンにおいて行われる対象体領域抽出ステップを示すフローチャートである。
【図11】(A)は球推定アルゴリズムにおいて選択される計測点を示し、(B)は(A)で選択された点から生成された仮球を示し、(C)は(B)で生成された仮球の球面の所定範囲に含まれる計測点を示し、(D)は(C)の計測点数から決定された仮球を示す。
【図12】図5に示す対象体推定ルーチンにおいて行われる対象体認識ステップを示すフローチャートである。
【図13】図12に示す対象体認識ステップにおいて行われる仮球評価ステップを示すフローチャートである。
【図14】図5に示す対象体推定ルーチンにおいて行われる不正対象体削除ステップを示すフローチャートである。
【図15】図14に示す不正対象体削除ステップにおいて行われる球体内計測点判定ステップを示すフローチャートである。
【図16】図14に示す不正対象体削除ステップにおいて行われる表面積判定ステップを示すフローチャートである。
【図17】頂点面積の概略図である。
【図18】図14に示す球不正対象体削除ステップにおいて行われる重複球判定ステップを示すフローチャートである。
【図19】(A)は本発明の実施形態の変形例に使用する対象物体を3次元計測手段から見た概略図、(B)は(A)のXIX-XIX線に沿う断面図である。
【図20】対象体の形状データ取得ステップの変形例を示すフローチャートである。
【図21】設定された側面除外適用範囲の一例を示す概略図である。
【図22】対象体推定ルーチンで行われる側面除外ステップの変形例を示すフローチャートである。
【図23】(A)は3次元計測手段で取得した対象物体の計測点群から対象物体の検出を行う際に出現する側面を示す、図19(A)のXIX-XIX線に沿う断面図、(B)は各計測点の法線ベクトルと各計測点から視点方向へのベクトルとのなす角度を示す図である。
【図24】対象物体の凹部に相当する範囲に対して側面除外ステップを行わなかった場合に検出される対象物体を模式的に表す図である。
【発明を実施するための形態】
【0025】
<第1実施形態>
以下、本発明の第1実施形態について図面を参照しながら説明する。
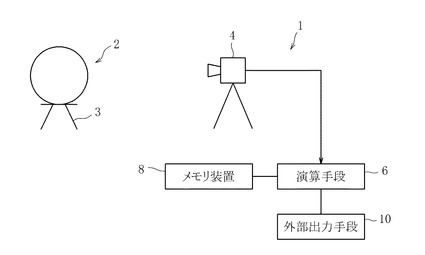
図1は、本発明の第1実施形態に供試される対象体認識装置1の概略構成図である。
図1に示すように、対象体認識装置1は対象体である球体2の形状を仮想座標空間において表現する装置であり、支持体3に支えられた球体2の形状データを取得する3次元計測手段4と、3次元計測手段4にて取得された形状データから仮想座標空間における球体2を演算する演算手段6と、演算手段6にて演算された結果等を記憶するメモリ装置8と、演算された結果等を出力する外部出力手段10とを備える。
ここで、3次元計測手段4は、球体2上の測定点までの距離を計測することにより、または、球体2をステレオカメラなどの装置を利用して撮像することにより、球体2の形状データを取得する。
【0026】
演算手段6とメモリ装置8とは、図示しないがコンピュータに備えられている。演算手段6は当該コンピュータの中央演算処理装置(以下、CPUと略す)により構成され、メモリ装置8はRAM、ROM等を含んで構成されており、メモリ装置8には各プログラムが格納されている。
外部出力手段10は、シリアル通信、LANのネットワーク通信、画面出力、外部メモリ書き込み、またはファイル出力等により算出した結果を出力する。なお、この他にキーボード等の入力手段が演算手段6に接続されていてもよい。
【0027】
以下、このように構成された本発明に係る対象体認識装置1の球体検出方法について説明する。
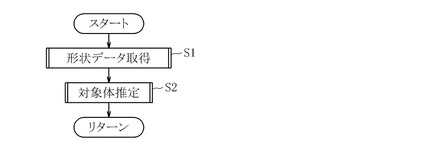
図2は、対象体検出方法を示すフローチャートであり、図3は対象体の形状データを取得する形状データ取得ステップのフローチャートである。なお、後述するステップS12以降の各処理は、メモリ装置8に格納されている各プログラムを演算手段6にて実行することにより行われる。なお、球体2の半径は予めメモリ装置8に格納されているものとする。
【0028】
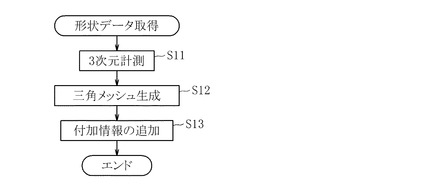
ステップS1では、球体2の形状データを取得する。詳しくは、図3に示す形状データ取得ステップのフローチャートに基づいて説明する。
ステップS11では、3次元計測手段4から球体2の形状データを計測点群として取得する。3次元計測手段4は、例えばレーザ距離計やステレオカメラ等を使用するものである。
【0029】
3次元計測手段4がレーザ距離計である場合、レーザ光の射出とその反射レーザの受光とにより3次元計測手段4の位置から球体2上の各計測点までの距離をレーザ計測し、計測した各距離データを3次元の計測点群として形状データを取得する。
また、3次元計測手段4がステレオカメラである場合、球体2を撮像することで、画像データに含まれる球体2の部分を3次元の計測点群として取得する。
また、3次元計測手段として、レーザ距離計やステレオカメラなどの計測データを記録した保存媒体を代わりに用いることもできる。
【0030】
ステップS12では、仮想座標空間において上述した各計測点をそれぞれ結んでいき、図9に示すように三角形メッシュを規定していき、対象体領域を生成する。このようにすることで、ステップS11で得られた形状データはポリゴンのように表面を持つ形状データとなり、各計測点から面の向きを決めることができる。図4に三角形メッシュ作成後の形状データの一例を示す。図4の矢印の向きは、3次元計測手段4の撮像方向を表している。
【0031】
ステップS13では、各計測点に相当する三角形の各頂点における法線ベクトルや頂点面積を求め、付加情報として追加する。他にもレーザの反射強度、またステレオカメラなどの計測手段を利用する場合には色の情報等を計算するというような付加的な情報を追加する。なお、法線ベクトルや反射強度、色の情報、頂点面積は付加情報の一例であり、他の情報を追加してもよい。
図2に戻り、続くステップS2では、上記ステップS13で求めた法線ベクトル及び頂点面積などの付加情報を用いて仮想座標空間における球中心の推定を行う。
【0032】
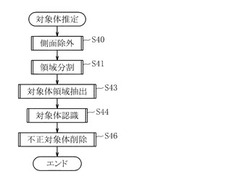
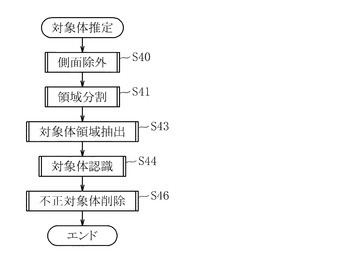
詳しくは、図5に対象体推定ルーチンのフローチャートが示されており、同フローチャートに従い、図6〜図18を参照しながら説明する。
ステップS40では、3次元計測手段4にて検出された球体の側面に相当する計測点を除外する。
【0033】
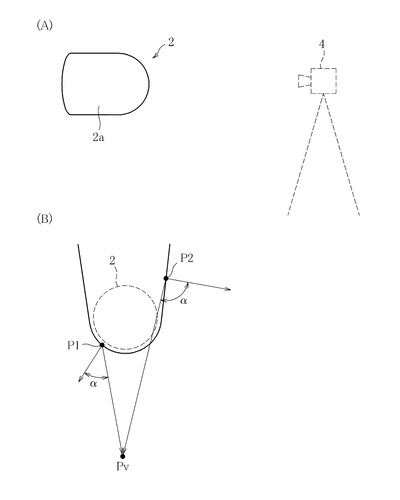
本来球体2に側面は存在しないが、使用する3次元計測手段4の種類によっては、図6(A)に示すように3次元計測手段4から見た球体2の境界付近の各計測点を認識処理する過程で側面2aが現れてしまうような計測点を取得する傾向のあるものが存在する。そこでステップS40では、図6(B)に示すように、各計測点P1、P2の法線ベクトルと、各計測点P1、P2から3次元計測手段4の視点Pvへのベクトルとのなす角度αから球体の側面に相当すると考えられる計測点を除外する。
【0034】
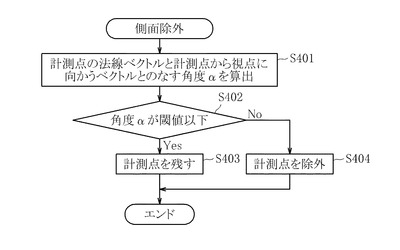
詳しくは、ステップS40では、側面除外ステップが実行される。詳しくは、図7に示す側面除外ステップは1つの計測点に対して実行される処理を示している。なお、本側面除外ステップは、全ての計測点に対して実行される。
ステップS401では、計測点の法線ベクトルと、計測点から3次元計測手段4の位置である視点方向に向かうベクトルとのなす角度αを求める。
【0035】
続くステップS402では、上記ステップS401で求めた角度αが側面と判定される閾値以下であるか否かを判定する。当該判定結果が真(Yes)の場合にはステップS403へ進み、偽(No)と判定された場合にはステップS404へ進む。
ステップS403では、計測点が球体の側面に位置しないとして、計測点を残す。
ステップS404では、計測点が球体の側面に位置するとして、計測点を除外する。
【0036】
そして、ステップS403またはS404の後にステップS401へ戻り、次の計測点に対して上記各ステップを繰り返す。
上記ステップS403、S404では、例えば図6(B)に示す計測点P1を球体の計測点として残し、計測点P2は球体の側面に相当するとして除外する処理を行う。
【0037】
図5に戻り、続くステップS41では領域分割ステップを実行する。ここでは、上記ステップS12で生成された対象体領域について、球体であると推定される対象体領域を分割していく。
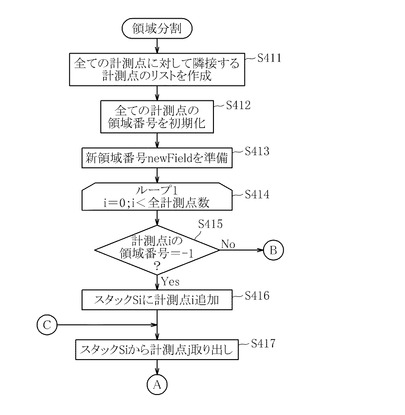
詳しくは、図8−1、図8−2に示す領域分割ステップのフローチャートに従って、ステップS41で領域分割ステップが実行される。ここで、図8−1、図8−2に示す領域分割ステップは、全ての計測点に対して実行される。
【0038】
ステップS411では、全ての計測点に対して、各計測点に隣接する計測点のリストを作成する。
ステップS412では、全ての計測点の領域番号を初期化する。ここでは、初期値として領域番号に−1を設定する。
続くステップS413では、新領域番号newFieldに0を設定する。
【0039】
ステップS414では、変数iが全計測点数より小さい間、ステップS415以降の処理を行う。
ステップS415では、i番目の計測点iの領域番号が−1、即ち領域番号が割り当てられていないことを判定する。当該判定結果が真(Yes)の場合には計測点iに領域番号がまだ割り当てられていないとしてステップS416へ進む。一方、当該判定結果が偽(No)の場合には、計測点iに領域番号が既に割り当てられているとして、変数iをインクリメントしてステップS414へ戻り、次の計測点に対して処理を行う。
【0040】
ステップS416では、スタックSiに計測点iを追加する。
続くステップS417では、スタックSiから計測点を取り出す。本ステップで取り出した計測点を計測点jとする。
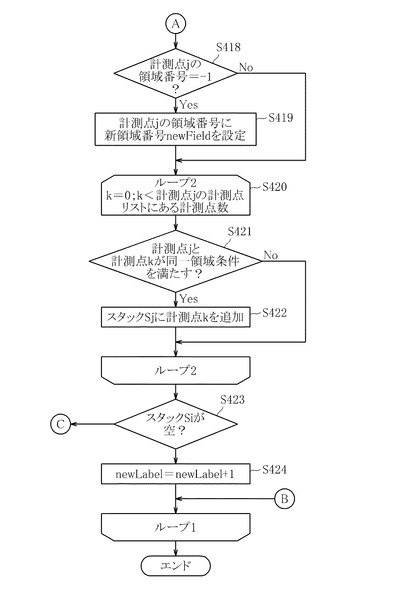
ステップS418では、計測点jの領域番号が−1、即ち領域番号が割り当てられているか否かを判定する。当該判定結果が真(Yes)の場合には、まだ領域番号が割り当てられていないとしてステップS419へ進む。一方、当該判定結果が偽(No)の場合には、計測点jに領域番号が既に割り当てられているとして、ステップS420へ進む。
【0041】
ステップS419では、計測点jの領域番号に、新領域番号newFieldを割り当てる。
ステップS420では、変数kが計測点jの計測点リストに含まれる全計測点数より小さい間、ステップS421、S422の処理を行う。
【0042】
ステップS421では、計測点j及び計測点jに隣接する計測点リストの中の計測点kが、同一領域内にあるための条件を満たしているか否かの判定を行う。同一領域内にあるための条件とは、例えば計測点jと計測点kとがそれぞれ有する法線ベクトルのなす角度が閾値以内であるか、計測点j、k間の距離が閾値以内であるか等の計測点に追加された付加情報を用いた条件に基づいて判定する。なお、法線ベクトルの角度や計測点間の距離の付加情報を判定条件としたが、色の情報を用いた判定条件やレーザの反射強度による判定条件等としてもよい。
当該判定結果が真(Yes)の場合には、計測点kは計測点jと同じ領域内にあるとしてステップS422へ進む。
【0043】
ステップS422では、計測点kを計測点jと同じ領域内にあるとして、計測点kに新領域番号newFieldを設定し、計測点jと同じ領域にある計測点を格納するスタックSjに計測点kを追加する。
一方、上記ステップS421の判定結果が偽(No)と判定された場合には同じ領域内にはいないとして、変数kをインクリメントしてステップS420へ戻り、次の計測点kに対して上述した処理を行う。
【0044】
ステップS423では、スタックSi内に計測点が残っていないか否かを判定する。当該判定結果が真(Yes)の場合にはスタックSi内の計測点の処理は終了したとしてステップS424へ進み、偽(No)と判定された場合には、まだスタックSi内に計測点が残っているとしてステップS417へ戻る。
ステップS424では、新領域番号newFieldをインクリメントする。
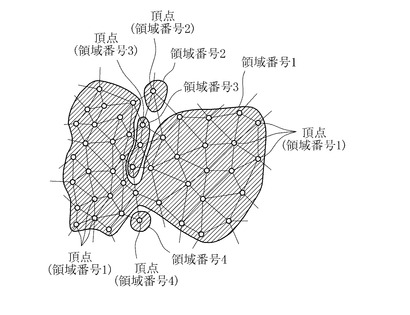
ステップS41を実行した結果を図9に示すように、各計測点に領域番号が付加されて対象体領域が分割される。
【0045】
図5に戻り、ステップS43では対象体領域抽出ステップ(対象物体領域抽出ステップ)を実行する。ここでは、上記ステップS41で対象体領域が分割されて形成した複数の対象体領域のうち、球体でない対象体領域を推定不可領域として除外する。
詳しくは、図10に示す対象体領域抽出ステップのフローチャートに基づいて説明する。
【0046】
図10に示す対象体領域抽出ステップは1つの対象体領域に対して実行する処理を示しており、全ての対象体領域に対して対象体領域抽出ステップが実行される。ここでは、仮想座標空間における球体2に相当する領域を抽出するものである。
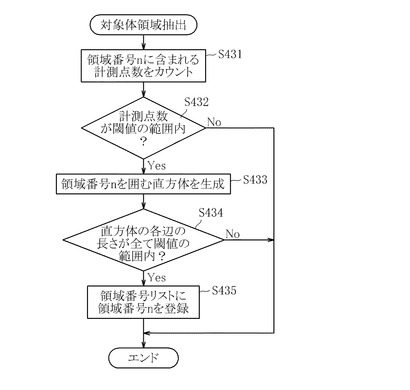
ステップS431では、領域番号nに含まれる計測点数をカウントする。
ステップS432では、上記ステップS431でカウントした計測点数が閾値の範囲内、つまり、領域番号nに含まれる計測点数が球体と推定される点数分存在しているか否かを判定する。3次元計測手段4と球体2との距離に応じて球体2に相当する計測点の数は変化し、例えば3次元計測手段4と球体2に相当する領域との距離が遠くなるにつれて、球体に相当する計測点が少なくなる。従って閾値については、3次元計測手段4からの距離に応じた係数を乗算、または加減算し、球体に相当する領域からの距離が遠くなるほど球体と推定される計測点数が小さくなるようにする。当該判定結果が真(Yes)の場合にはステップS433へ進み、偽(No)である場合には次の領域番号に対して球体領域抽出ステップを実行する。
【0047】
ステップS433では、領域番号nに含まれる全ての計測点を含む直方体を生成する。
ステップS434では、上記ステップS433で生成した直方体を構成する各辺の長さが、球体2の半径に所定値を加減算または乗算した閾値の範囲内、つまりその領域の大きさが球体と推定される大きさに相当するか否かを判定する。当該判定結果が真(Yes)の場合にはステップS435へ進み、偽(No)である場合には次の領域番号に対して本球体領域抽出ステップを実行する。なお、上記ステップS432、S434では判定条件を閾値の範囲内としているが、閾値を変えることで判定条件を閾値以上または閾値以下とするようにしてもよい。また、ステップS433では直方体を生成しているが、形状はこれに限られず、例えば領域番号nに含まれる全ての計測点を含む三角錐や円柱などの幾何学的な形状を生成するようにしてもよい。この場合、上記ステップS434では、各形状の辺の長さや半径が球体2の半径に所定値を加算または乗算した閾値以下であるか否かを判定する。
【0048】
ステップS435では、領域番号nが球体と推定される対象体領域(推定領域)であるとして、領域番号リストに領域番号nを登録する。
そして、ステップS431へ戻り、次の領域番号に対して上記各ステップを繰り返す。
なお、上記ステップS432では、領域番号nにおける計測点数で球体と推定される領域であるか否かを判定したが、計測点数の代わりに領域番号nの面積を使用してもよい。ここで、閾値となる面積は球体2の半径から算出される面積である。
【0049】
図5に戻り、ステップS44では、対象体認識ステップ(対象物体認識ステップ)を実行する。ここでは、球推定アルゴリズムを使用して、仮想座標空間における仮の球(推定球体、以下、仮球とする)を生成する。
当該球推定アルゴリズムとは、任意に複数のサンプルを抽出して仮球を生成し、複数の仮球を生成した中から最もスコアの高いものを出力する方法で球体を推定していくものである。
【0050】
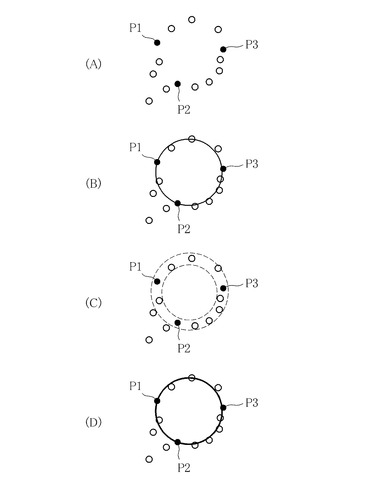
詳しくは、図11(A)に示すように、仮想座標空間にある計測点のうち任意の3点以上の点を選択する。ここでは例として3点P1〜P3を選択し、図11(B)のようにP1〜P3を通る仮球の位置を求める。そして、図11(C)に示すように、位置を求めた仮球の球面の所定範囲に含まれる計測点をスコアとして計上する。上述した処理を所定回数繰り返し、生成された仮球の中から図11(D)のように、最もスコアの高い仮球を出力する。
【0051】
上記所定回数は、十分に球体を検出できるように使用者によって指定された回数か、或いはN回仮球を生成したときに少なくとも1回は選択した全ての計測点が推定すべき球体の球面と判定される所定範囲内に含まれる確率を計算し、一定の確率以上になるように計測点の数から統計的に求められる試行回数Nである。
【0052】
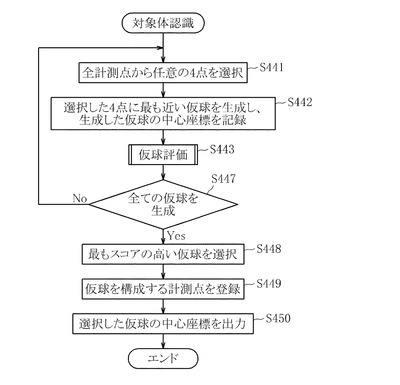
対象体認識ステップのフローチャートを図12に示す。なお、図11では任意の3点を選択して仮球を生成することについて述べたが、本フローチャートでは、後述するように任意の4点を選択して仮球を生成する方法について示している。また、全ての計測点が球体表面にある仮球は生成できない場合があるので、球体表面から各計測点との距離の総和が最小となるように仮球の位置を求める。また、本フローチャートは、上記ステップS435で登録された領域番号リストにある全ての領域に対して行われる。
【0053】
ステップS441では、領域分割ステップで分割した領域の中の計測点から任意の4点を選択する。なお、本ステップでは4点を選択しているが、3点以上であればよい。
ステップS442では、ステップS441で選択した4点に最も近い仮球を生成し、生成した仮球の中心座標を算出する。ここで、生成される仮球は選択した4点の座標と球体の半径とから求められる。
【0054】
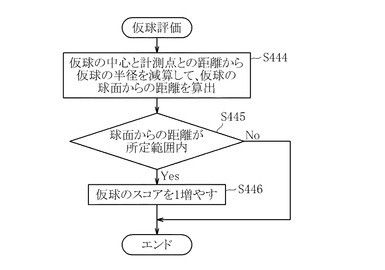
ステップS443では、仮球評価ステップを実行する。
図13に示す仮球評価ステップのフローチャートは、仮球が生成された領域番号iに存在し、且つ仮球の中心座標から仮球の半径に所定値を加算した範囲、つまり、仮球の中心から仮球の球面とされる範囲内にある全ての計測点に対して実行される。
ステップS444では、上記ステップS442で算出した仮球の中心座標と計測点との距離から仮球の半径を減算して、仮球の球面から計測点までの距離を算出する。
【0055】
ステップS445では、上記ステップS444で算出された仮球の球面からの距離が、仮球の球面にあると判定される所定の範囲内にあるか否かが判定される。当該判定結果が真(Yes)の場合にはステップS446に進み、偽(No)の場合には次の計測点に対して本仮球評価ステップを実行する。
ステップS446では、当該計測点が仮球に含まれるとして仮球のスコアを1増やす。
【0056】
そして、ステップS444へ戻り、次の計測点に対して上記各ステップを実行する。
本仮球評価ステップが領域番号iに存在する全ての計測点に対して実行されると、ステップS447へ進む。
ステップS447では、生成可能な仮球が全て生成されたか否かを判定する。当該判定結果が真(Yes)の場合にはステップS448へ進み、偽(No)の場合にはステップS441へ戻る。
【0057】
図12に戻り、ステップS448では、上記ステップS442で生成された仮球の中で最もスコアの高い仮球を選択する。
続くステップS449では、上記ステップS448で選択された仮球に対し、仮球の中心座標から仮球の半径に所定値を加算した範囲に存在する計測点を探索する。ここで探索される計測点は、仮球の球面と判定される範囲内に存在する計測点である。そして、探索された計測点を仮球を構成する計測点として登録する。
ステップS450では、上記ステップS448で選択された仮球を球体として認識し、中心座標を出力する。
【0058】
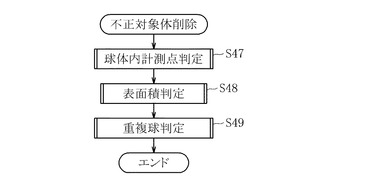
図5に戻り、ステップS46では、不正対象体削除ステップ(不正対象物体削除ステップ)を実行する。当該不正対象体削除ステップのフローチャートを図14に示す。図14に示すように、不正対象体削除ステップでは、上記ステップS44の対象体認識ステップで認識された球体のうち、誤って認識された球体を削除するものである。当該不正対象体削除ステップは、ステップS47として球体内計測点判定ステップ、ステップS48として表面積判定ステップ、ステップS49として重複球判定ステップを行うものである。なお、実行する順番はこれに限られない。
【0059】
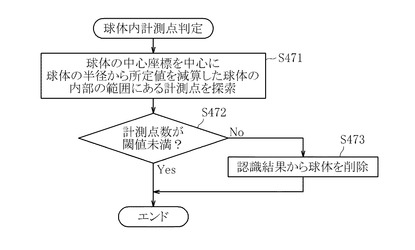
図15に、球体内計測点判定ステップのフローチャートを示しており、当該フローチャートに基づいて以下に説明する。
ステップS471では、上記ステップS450で球体と認識された認識球体の中心から、認識球体の半径から所定値を減算した範囲にある計測点を探索する。
【0060】
ステップS472では、探索した計測点数が閾値未満であるか否かを判定する。ここで、認識球体の形状及び位置が球体2と略等しく認識されている場合、認識球体の内部の所定範囲に計測点は存在しないので理想的には計測点数は0となるが、ノイズなどの影響で0よりも大きくなることもあるため、閾値に基づいて判定する。当該判定結果が真(Yes)の場合には探索された計測点数が閾値未満であるとして本球体内計測点判定ステップを終了し、偽(No)の場合には探索された計測点数が閾値以上であるとしてステップS473へ進む。
ステップS473では、認識球体が誤った認識球体、即ち不正球体であるとして、認識結果から該当する球体を削除する。
【0061】
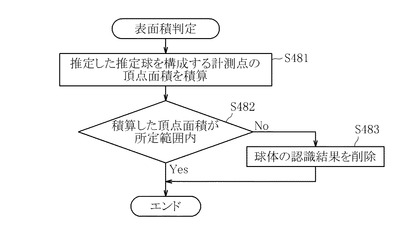
次に、図14に示す表面積判定ステップを実行する。図16に、表面積判定ステップのフローチャートを示しており、当該フローチャートに基づいて以下に説明する。
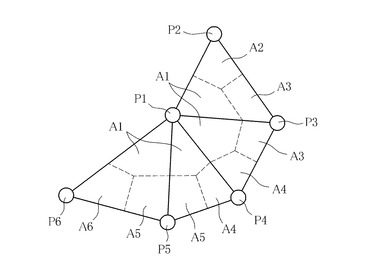
ステップS481では、推定した球体を構成する計測点の頂点面積を積算する。
【0062】
ここで、図17に頂点面積の概略図を示す。頂点面積とは、上述したステップS12では各計測点を頂点として三角形メッシュを生成したが、当該三角形メッシュの面積を各頂点に割り振った面積である。例えば図17に示すように、計測点P1の頂点面積はA1で示される面積であり、計測点P2の頂点面積は面積A2、計測点P3の頂点面積は面積A3、計測点P4の頂点面積は面積A4、計測点P5の頂点面積は面積A5、計測点P6の頂点面積は面積A6である。
理想的に球体を認識した場合、つまり3次元計測手段4で計測した球体2の形状及び位置を略等しく認識した場合は半球として検出されるので、積算された頂点面積は球体2の表面積の略半分となる。
【0063】
ステップS482では、上記ステップS481で積算した頂点面積が3次元計測手段4で計測された球体2と判定できる所定範囲内にあるか否かを判定する。当該判定結果が真(Yes)の場合には本表面積判定ステップを終了してステップS49へ進む。
【0064】
一方、上記ステップS482で偽(No)と判定された場合には、推定した球体が半球ではないとしてステップS483へ進む。
ステップS483では、球体の認識に失敗した不正球体であるとして、該当する球体の認識結果を削除する。
上述したステップS461〜S483までの処理は、上記ステップS44で球体と認識された全ての認識球体に対して実行する。その後、ステップS49へ進む。
【0065】
続くステップS49では、重複球判定ステップを実行する。重複球判定ステップの前までに実行した処理により認識された認識球体は、略等しい位置に複数の認識球体が検出されている場合がある。そこで、重複球判定ステップで重複している認識球体を不正球体として除外する処理を実行する。
【0066】
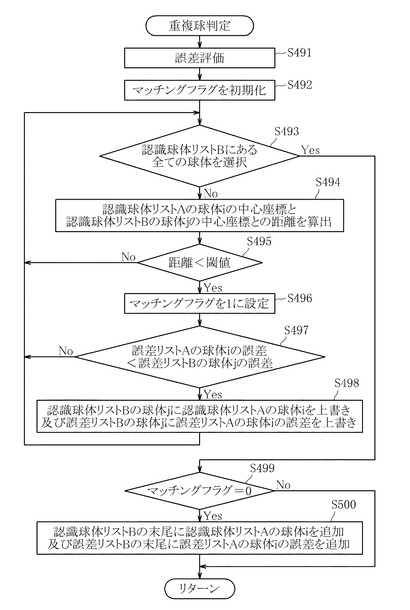
図18に重複球判定ステップのフローチャートを示す。ここでは、認識球体が格納されている認識球体リストA及び誤差リストAと、認識球体リストB及び誤差リストBとを使用する。認識球体リストAは重複する球を含み、認識球体リストBは重複した球体を認識球体リストAから除去したものである。誤差リストAは認識球体リストAに存在する各球体の誤差リストであり、誤差リストBは認識球体リストBに存在する各球体の誤差リストである。初期状態、つまり本重複球判定ステップを実行する前の状態では、認識球体リストBに設定されている球体の数は0であり、誤差リストBには何も設定されていない状態である。図18は認識球体リストAに存在する1つの球体iに対して行う処理を示しており、本ステップは認識球体リストAに存在する全ての球体に対して実行される。
【0067】
ステップS491では、認識球体の誤差を評価する(誤差評価ステップ)。全ての認識球体に対して誤差を求め、当該誤差が球体と判定される誤差よりも小さい認識球体を認識球体リストAに追加し、当該認識球体の誤差を誤差リストAに設定する。ここでは誤差の一例として、球体を構成する各計測点と球体表面との間の距離の総和とする。
ステップS492では、認識球体リストAの球体が認識球体リストBに存在するか否かを判定するためのマッチングフラグを初期化する。ここで、認識球体リストAで選択した球体を球体iとする。
後述するステップS493〜S498は、認識球体リストBに存在する各球体に対して実行する。
【0068】
ステップS493では、認識球体リストBに存在する全ての球体が選択されたか否かを判定する。当該判定結果が偽(No)と判定された場合にはステップS494へ進む。
続くステップS494では、認識球体リストAの球体の中心座標と認識球体リストBの球体の中心座標との距離を算出する。ここで、認識球体リストBで選択した球体を球体jとする。
ステップS495では、上記ステップS494で算出された距離が、同一の球体と判定できる閾値より短いか否かを判定する。当該判定結果が真(Yes)の場合にはステップS496へ進む。
【0069】
ステップS496では、認識球体リストAの球体iと認識球体リストBの球体jとが同一であるとして、マッチングフラグに1を設定する。
ステップS497では、誤差リストAの球体iの誤差が誤差リストBの球体jの誤差よりも小さいか否かを判定する。つまり、認識球体リストAの球体iが認識球体リストBの球体jよりも精度がよいか否かを判定する。当該判定結果が真(Yes)の場合にはステップS498へ進む。
【0070】
ステップS498では、認識球体リストAの球体iを認識球体リストBの球体jに上書きする。また、誤差リストAの球体iの誤差を誤差リストBの球体jの誤差に上書きする。その後、ステップS493へ戻り、認識球体リストBにある球体j+1に対して処理を行う。
一方、ステップS495及びS497で偽(No)と判定された場合には、認識球体リストBに存在する次の球体j+1に対して処理を実行するためにステップS493へ戻る。
【0071】
そして、上記ステップS493で真(Yes)と判定された場合にはステップS499へ進む。
ステップS499では、マッチングフラグが0であるか否かを判定する。即ち、上記ステップS493〜S498の中で認識球体リストBの中に認識球体リストAの球体iと重複する球体が見つからなかったか否かを判定する。当該判定結果が真(Yes)の場合にはステップS500へ進む。
【0072】
ステップS500では、認識球体リストBの末尾に認識球体リストAの球体iを追加する。また、誤差リストBの末尾に誤差リストAの球体iの誤差を追加する。
一方、上記ステップS499で偽(No)と判定された場合は、認識球体リストAに存在する次の球体i+1に対して本重複球判定ステップを実行する。
【0073】
上記ステップS491〜S500を認識球体リストAにある全ての球体に対して行うことにより、認識球体リストBには、認識球体リストAにある球体の中で略同一の位置に重複して存在する球体がある場合には当該重複する球体の中から最も誤差の小さい球体が設定され、また重複する球体がない、つまり1つの球体として認識された認識球体である場合には1つの球体として設定される。
認識球リストAに存在する全ての球体に対して本重複球判定ステップが実行されると、上記対象体推定ルーチンを終了し、検出した球体の情報を外部出力手段10に出力する。
【0074】
このように、本実施形態によれば、3次元計測手段4にて計測された球体2の形状データを3次元の計測点群として取得し、仮想座標空間で計測点群から生成された対象体領域に対して領域分割を行い、球体でない領域を除外し、球推定アルゴリズムにより求められた認識球体を球体として検出する。
これにより、仮想座標空間における対象体領域から球体に相当する位置を推定することができるとともに、球体と推定された推定領域に限定して球推定アルゴリズムを実行するので、計算量をより少なくすることができ、より高速に球体を検出することができる。
【0075】
また、計測点に含まれるノイズ等の外れ点を除外することができるので、より高精度に球体を検出することができる。
そして、球体の側面として検出されてしまう計測点を除外することにより、全ての計測点中に含まれるノイズ等の外れ点を除外することができるので、検出する球体の中心座標が視点から見て略正確な中心位置よりも奥方向に推定されることを防止することができ、高精度に球体を検出することができる。
【0076】
また、対象体領域が分割された複数の各対象体領域に対して、対象体領域に含まれる計測点数または対象体領域の面積と、対象体領域に含まれる全ての計測点を含む直方体の各辺の長さ等の計測点を外包する幾何学的な形状の大きさとが球体を推定するために必要な条件を満たしていない場合は当該対象体領域を除外することにより、球体の推定に使用する対象体領域を減少させることができるので、球体の誤検出を防ぐことができ、高精度に球体を検出することができる。また、計算量がより少なくなるので、球体の検出をより高速に行うことができる。
【0077】
また、不正な球体を除外するために、認識球体内の所定範囲にある計測点数の探索、認識球体を構成する計測点の頂点面積を積算した面積からそれぞれ不正な球体を除外することにより、球体の誤検出を防止することができ、高精度に球体を検出することができる。
また、認識球体の中から、略同一形状で略同一位置に重複して存在する認識球体を除外することにより、球体の誤検出を防止することができるので、より高精度に球体を検出することができる。
【0078】
<側面除外の変形例>
次に、上述した側面除外の変形例について、図面を参照しながら以下に説明する。本変形例は、上記実施形態に対して、対象体を球体に限らず、例えば三角錐や立方体等、様々な形状の物体を使用する点が異なり、その他の構成は共通している。従って、共通箇所の説明は省略し、相違点について以下に説明する。
【0079】
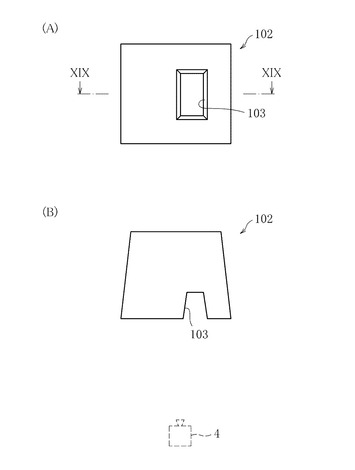
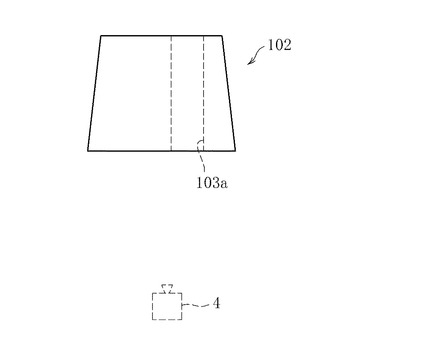
本実施形態では、図19(A)に対象体の上面図を示すように、略直方体に凹部が形成されている物体を対象物体102として用いるものとする。図19(B)に図19(A)のXIX-XIX線に沿う断面図を示すように、対象物体102は3次元計測手段4に対して凹部103を向けて配置される。また、図19(B)に示すように、対象物体102の凹部103は、3次元計測手段4の方向に向けて配置される。
【0080】
このように構成された本実施形態に係る対象体認識装置101の対象物体検出方法における側面除外について、以下に説明する。
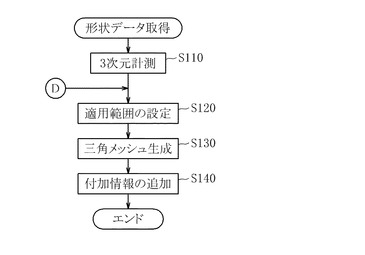
図20は、対象体の形状データ取得ステップの変形例を示すフローチャートである。なお、後述するステップS120以降の各処理は、メモリ装置8に格納されている各プログラムを演算手段6で実行することにより行われる。
【0081】
ステップS110では、3次元計測手段4を用いて、対象物体102の形状データを3次元の計測点群として取得する。
【0082】
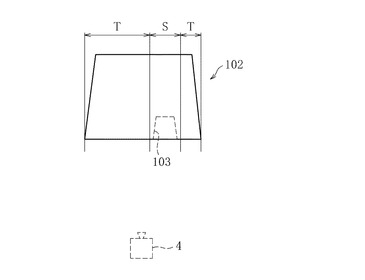
ステップS120では、後述する側面除外ルーチンで使用する、側面除外の処理を行う対象範囲を設定する。後述する側面除外ルーチンでは、上記ステップS110で取得した3次元の計測点群の中で、側面のないところに側面として現れてしまう計測点を除外する処理を行うが、本ステップでは、対象物体102の形状に応じて、この側面を除外する処理を適用する範囲を設定する。本変形例における対象物体102では、図21に示すように、例えば凹部103を含む範囲Sを除く範囲Tを側面除外の処理を行う対象として設定する。
【0083】
ステップS130では、仮想座標空間において、上述した各計測点をそれぞれ結んでいき、図9に示すような三角形メッシュを規定していき、対象体領域を生成する。
ステップS140では、各計測点に相当する三角形の各頂点における法線ベクトルや頂点面積を求め、付加情報として追加する。他にもレーザの反射強度や、ステレオカメラ等の計測手段を利用する場合には、色の情報等の付加的な情報を付加情報として追加するようにしてもよい。
【0084】
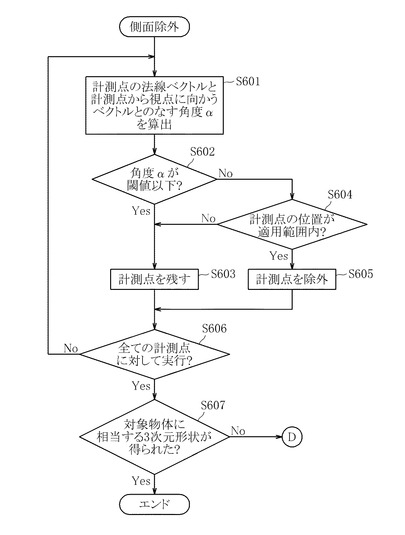
図22に、図5に示したステップS40の側面除外ステップの変形例を示すフローチャートを示している。図22のフローチャートは、1つの計測点に対して実行される処理を示している。なお、この側面除外ステップは、全ての計測点に対して実行される。
【0085】
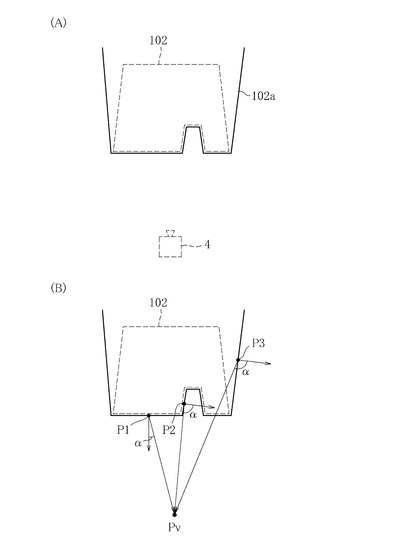
この変形例で計測対象としている対象物体102は台形柱であり、3次元計測手段4から離間する方向に対象物体102の側面が互いに近付く形状なので、3次元計測手段4から側面は見えない。しかし、上記実施形態でも述べたが、図23(A)に示すように、3次元計測手段4の種類によって3次元計測手段4から見た対象物体102の境界付近の計測点を認識処理する過程で、側面102aが現れてしまうような計測点を取得してしまう傾向のあるものが存在する。そこで、図22に示すフローチャートでは、図23(B)に示すように、例えば計測点P1〜P3のそれぞれの法線ベクトルと、計測点P1〜P3から3次元計測手段4の視点Pvに向かうベクトルとのそれぞれのなす角度αから、対象物体102の側面に相当する計測点のうち、上記ステップS120で設定した側面除外の処理を適用する範囲にある計測点を除外する処理を行う。
【0086】
ステップS601では、計測点の法線ベクトルと、当該計測点から3次元計測手段4の視点に向かうベクトルとのなす角度αを求める。
ステップS602では、上記ステップS601で求めた角度αが、対象物体102の側面102aと判定される閾値以下であるか否かを判定する。当該判定結果が真(Yes)の場合にはステップS603へ進む。
【0087】
ステップS603では、当該計測点が対象物体102の側面に位置していないとして、計測点を残す。
一方、上記ステップS602の判定結果が偽(No)の場合には、当該計測点が対象物体102の側面に位置しているとして、ステップS604へ進む。
【0088】
ステップS604では、当該計測点の位置が、上記ステップS120で設定した側面除外の適用範囲内にあるか否かを判定する。当該判定結果が真(Yes)の場合には、計測点が側面除外の範囲内TにあるとしてステップS605へ進み、判定結果が偽(No)の場合には、計測点が側面除外の適用範囲外SにあるとしてステップS603へ進む。
ステップS605では、計測点が対象物体102の側面に相当する位置にあるとして、当該計測点を除外する。
【0089】
ステップS606では、全ての計測点に対して実行されたか否かを判定する。当該判定結果が真(Yes)の場合には、全ての計測点に対して側面を除外する処理が行われたとして、ステップS607へ進む。一方、判定結果が偽(No)と判定された場合には、全ての計測点の側面除外処理が終了していないとしてステップS601へ戻り、次の計測点に対して上記各ステップを繰り返す。
【0090】
ステップS607では、対象物体に相当する3次元形状が得られたか否かを判定する。当該判定結果が真(Yes)の場合には、対象物体に相当する3次元形状が得られたとして側面除外ステップを終了する。一方、当該判定結果が偽(No)の場合には、対象物体に相当する3次元形状が得られなかった、即ち得られた3次元形状の凹部が対象物体102の凹部103に相当する形状ではなかったとしてステップS120へ戻り、対象物体102の側面を除外する範囲を再度設定する。
【0091】
上記ステップS604の判定処理を行わない場合、図24に示すように、凹部103の内壁に相当する計測点も側面と判定されて当該計測点が除外され、3次元計測手段4から見た凹部103に相当する領域が貫通孔103aとして現れてしまう。しかし、上記ステップS604の処理を行うことによって、側面ではない領域に存在する計測点が側面として除外されてしまうことを防止でき、凹部103の形状を得ることができる。
【0092】
このように、3次元計測手段4で取得した計測点群に対して側面除外の適用範囲内にある計測点に側面を除外する処理を行うことにより、球体のみならず、種々の形状の対象物体102から取得した計測点群を認識処理する際に側面が現れても、側面を除外して、精度よく対象物体102を認識することができる。
【0093】
以上で実施形態の説明を終えるが、本発明は上述した実施形態に限定されるものではない。
例えば、上記実施形態では球体2の半径情報が予めメモリ装置8に格納されているが、球体2の半径がメモリ装置8に格納されていない場合でも、上記対象体推定ルーチンを行ってよい。半径がわからない場合には、想定される最大の球体の大きさから半径を算出し、ステップS43における対象体領域抽出ステップのステップS434で当該半径に所定値を加算した閾値で判定を行い、ステップS44の対象体認識ステップは必ず4点を選択するようにステップS441〜S450を実行するようにすればよい。
【0094】
そして、上記実施形態では球体2の形状データを計測点群として取得しているが、形状データをボクセルデータとして取得する場合でも、当該ボクセルデータを点群とみなして上記対象体推定ルーチンを行ってもよい。
【符号の説明】
【0095】
1 対象体認識装置
2 球体
4 3次元計測手段
6 演算手段
8 メモリ装置
102 対象物体
【技術分野】
【0001】
本発明は、対象物体の検出方法、検出装置及びプログラムに係り、詳しくは対象物体を計測または撮像することで得た対象物体の形状データに基づき、仮想空間座標にて対象物体を検出する方法、装置及びプログラムに関する。
【背景技術】
【0002】
従来、対象体を検出する方法として、対象体の撮像または計測点から対象体までの距離を計測することにより、対象体の形状データを取得する方法がある。当該形状データに基づいて、2次元または3次元の仮想空間座標における対象体が占める対象体領域を生成することにより、対象体の形状を仮想座標空間で表現する。
しかしながら、3次元の仮想座標空間では、計測時や撮像時等におけるノイズ等により、上述のように生成された対象体領域の境界付近に不明瞭な形状部分が生じるという問題がある。
【0003】
そこで、3次元画像において、物体境界画素に対し球体を逐次当てはめていき、物体と球体との重なる割合により、その着目画素を抽出するかどうかを判定する方法が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3888975号
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、対象体を3次元の点群として計測する場合、計測した形状データにおける球体と背景との境界付近を補正する必要がある。
この点、上記特許文献1に開示された従来技術は、コンピュータ断層撮影装置(CT装置)の3次元画像を構成するボクセルデータに対して画素の抽出処理を行うものであり、対象体を3次元の点群として計測した場合には、当該点群に対して従来技術を適用できないという問題がある。
【0006】
また、別の補正方法として最小自乗法、領域分割、及びハフ変換を用いる方法等が知られているが、最小自乗法では、3次元の点群を構成する計測点にノイズ等の外れ点が存在する場合、球体の検出精度が低下してしまうため好ましくない。
そして、領域分割では、計測データの誤差やノイズなどの影響により領域分割を誤り、同一の球体を重複して検出したり、検出した球体の位置が偏ったりして、領域分割の精度が低下してしまうという問題がある。
【0007】
さらに、ハフ変換を使用する場合、特徴点を保存するために多くのメモリを必要とし、また計算量が大きくなるため、球体の算出に多くの時間を要するので好ましくない。
本発明は、上述した課題を解決すべくなされたものであり、その目的とするところは、対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法、検出装置及びプログラムを提供することにある。
【課題を解決するための手段】
【0008】
上記の目的を達成するべく、請求項1の対象物体の検出方法は、計測対象となる対象物体の形状を仮想座標空間において表現する対象物体の検出方法であって、3次元計測手段から3次元の計測点群として対象物体の形状データを取得する形状データ取得ステップと、前記形状データから生成された仮想座標空間において前記対象物体が占める対象体領域を、前記計測点群の各計測点の付加情報に従って複数の対象体領域に区画する領域分割ステップと、前記分割された各対象体領域の中から前記対象物体と推定される推定領域を抽出する対象物体領域抽出ステップと、前記推定領域毎に推定される単数又は複数の推定対象物体を生成し、該推定対象物体の中から前記対象物体と認識される推定対象物体を認識対象物体として選択する対象物体認識ステップと、を備えたことを特徴とする。
【0009】
請求項2の対象物体の検出方法では、請求項1において、前記形状データ取得ステップの後から前記対象物体認識ステップの前までの間に、前記形状データ取得ステップで取得した前記計測点群の各計測点における法線ベクトルと、該各計測点と前記3次元計測手段の位置である視点に向かうベクトルとのなす角度が前記対象物体の側面と判定される閾値より大きい場合に、該当する計測点を除外する側面除外ステップをさらに備えることを特徴とする。
【0010】
請求項3の対象物体の検出方法では、請求項2において、前記側面除外ステップは、前記計測点群における前記対象物体の側面を除外する範囲に計測点が存在する場合に、前記閾値より大きい角度となる計測点を除外するものであり、前記計測点群の全てに対して前記角度の判定が行われた後、残った計測点から形成される形状が、前記対象物体に相当する形状であることを判定するステップを有することを特徴とする。
【0011】
請求項4の対象物体の検出方法では、請求項1乃至3のいずれかにおいて、前記対象物体領域抽出ステップは、前記領域分割ステップにて区画された前記複数の対象体領域の中で、同一の対象体領域における計測点数または面積が前記対象物体と推定される閾値の範囲内の場合、または前記同一の対象体領域における計測点を全て含む幾何学的形状の大きさが前記対象物体と推定される閾値の範囲内の場合に、該当する対象体領域を対象物体と推定される領域として抽出することを特徴とする。
【0012】
請求項5の対象物体の検出方法では、請求項1乃至4のいずれかにおいて、前記認識対象物体のうち、誤認識した対象物体を不正対象物体として削除する不正対象物体削除ステップを備えることを特徴とする。
【0013】
請求項6の対象物体の検出方法では、請求項5において、前記対象物体の表面積が前記対象体である対象物体の表面積と判定される範囲外である場合に、該当する対象物体を削除する表面積判定ステップを含むことを特徴とする。
【0014】
請求項7の対象物体の検出方法では、請求項5において、前記対象物体は球体であって、前記不正対象物体削除ステップは、各球体の中心座標間の距離を算出し、該距離が同一の球体と判定される閾値より短い場合に、該当する球体を削除する重複球判定ステップを含むことを特徴とする。
【0015】
請求項8の対象物体の検出方法では、請求項5において、前記対象物体は球体であって、前記不正対象物体削除ステップは、前記球体の中心から前記球体の半径より短い前記球体の内部の範囲に計測点が存在する場合に、該当する球体を削除する球体内計測点判定ステップを含むことを特徴とする。
ここで、3次元計測手段のセンサのノイズは、滑らかな球体の表面では一般に正規分布となり安定したものとなるため、球体の内側に計測点が存在することはない。しかし、球体が遠方方向にある場合、または検出する球体が小さい場合には、上記対象体認識ステップで球体の位置を誤ることがある。請求項8の球体の検出方法は、この原理に基づいて行われる。
【0016】
請求項9の対象物体の検出装置は、計測対象となる対象物体の形状を仮想座標空間において表現する対象物体の検出装置であって、3次元計測手段から3次元の計測点群として対象物体の形状データを取得する形状データ取得手段と、前記形状データから生成された仮想座標空間において前記対象物体が占める対象体領域を、前記計測点群の各計測点の付加情報に従って複数の対象体領域に区画する領域分割手段と、前記分割された各対象体領域の中から前記対象物体と推定される推定領域を抽出する対象物体領域抽出手段と、前記推定領域毎に推定される単数又は複数の推定対象物体を生成し、該推定対象物体の中から前記対象物体と認識される推定対象物体を認識対象物体として選択する対象物体認識手段と、を備えたことを特徴とする。
【0017】
請求項10の対象物体の検出装置では、請求項9において、前記形状データ取得手段で取得した前記計測点群の各計測点における法線ベクトルと、該各計測点と前記3次元計測手段の位置である視点に向かうベクトルとのなす角度が前記対象物体の側面と判定される閾値より大きい場合に、該当する計測点を除外する側面除外手段をさらに備えることを特徴とする。
【0018】
請求項11の対象物体の検出装置では、請求項10において、前記側面除外手段は、前記計測点群における前記対象物体の側面を除外する範囲に存在する計測点に対して、前記閾値より大きい角度となる計測点を除外することを特徴とする。
【0019】
請求項12のプログラムは、コンピュータを、3次元計測手段から3次元の計測点群として測定対象となる対象物体の形状データを取得する形状データ取得手段、前記形状データから生成された仮想座標空間において前記対象物体が占める対象体領域を、前記計測点群の各計測点の付加情報に従って複数の対象体領域に区画する領域分割手段、前記分割された各対象体領域の中から前記対象物体と推定される推定領域を抽出する対象物体領域抽出手段、前記推定領域毎に推定される単数又は複数の推定対象物体を生成し、該推定対象物体の中から前記対象物体と認識される推定対象物体を認識対象物体として選択する対象物体認識手段、として機能させる。
【発明の効果】
【0020】
本発明の対象物体の検出方法によれば、3次元計測手段から取得された形状データを複数の対象体領域に区画し、その中から対象物体と推定される推定領域を抽出し、推定領域毎に推定された推定対象物体の中から対象物体として認識される対象物体を選択する。
本発明の対象物体の検出装置によれば、上述した対象物体の検出方法と同様の作用効果が得られる。
【0021】
これにより、仮想座標空間における計測点群の中で検出する対象物体に相当する位置を推定することができ、対象物体と推定される推定領域に対して対象物体の認識を行い検出することにより、計算量をより少なくすることができ、各計測点のうちノイズ等による外れ点を除外することができるので、より高速且つ高精度に対象物体を認識することができる。
【0022】
本発明の対象物体の検出装置によれば、上述した対象物体の検出方法と同様の作用効果が得られる。
【0023】
本発明のプログラムによれば、このプログラムを実行可能なコンピュータを備えた対象物体の検出装置において、上述した対象物体の検出方法と同様の作用効果が得られる。
【図面の簡単な説明】
【0024】
【図1】本発明の実施形態に供試される対象体認識装置の概略構成図である。
【図2】本発明に係る対象体検出方法のフローチャートである。
【図3】形状データ取得ステップを示すフローチャートである。
【図4】三角形メッシュ作成後に得られる形状の一例を示す図である。
【図5】対象体検出方法における対象体推定ルーチンを示すフローチャートである。
【図6】(A)は3次元計測手段で球体を計測して検出処理を行う際に出現する側面の例を示す図、(B)は各計測点の法線ベクトルと各計測点から視点方向へのベクトルとのなす角度を示す図である。
【図7】図5に示す対象体推定ルーチンにおいて行われる側面除外ステップを示すフローチャートである。
【図8−1】図5に示す対象体推定ルーチンにおいて行われる領域分割ステップを示すフローチャートである。
【図8−2】図5に示す対象体推定ルーチンにおいて行われる領域分割ステップを示すフローチャートである。
【図9】対象体に対して生成された複数の対象体領域を示す図である。
【図10】図5に示す対象体推定ルーチンにおいて行われる対象体領域抽出ステップを示すフローチャートである。
【図11】(A)は球推定アルゴリズムにおいて選択される計測点を示し、(B)は(A)で選択された点から生成された仮球を示し、(C)は(B)で生成された仮球の球面の所定範囲に含まれる計測点を示し、(D)は(C)の計測点数から決定された仮球を示す。
【図12】図5に示す対象体推定ルーチンにおいて行われる対象体認識ステップを示すフローチャートである。
【図13】図12に示す対象体認識ステップにおいて行われる仮球評価ステップを示すフローチャートである。
【図14】図5に示す対象体推定ルーチンにおいて行われる不正対象体削除ステップを示すフローチャートである。
【図15】図14に示す不正対象体削除ステップにおいて行われる球体内計測点判定ステップを示すフローチャートである。
【図16】図14に示す不正対象体削除ステップにおいて行われる表面積判定ステップを示すフローチャートである。
【図17】頂点面積の概略図である。
【図18】図14に示す球不正対象体削除ステップにおいて行われる重複球判定ステップを示すフローチャートである。
【図19】(A)は本発明の実施形態の変形例に使用する対象物体を3次元計測手段から見た概略図、(B)は(A)のXIX-XIX線に沿う断面図である。
【図20】対象体の形状データ取得ステップの変形例を示すフローチャートである。
【図21】設定された側面除外適用範囲の一例を示す概略図である。
【図22】対象体推定ルーチンで行われる側面除外ステップの変形例を示すフローチャートである。
【図23】(A)は3次元計測手段で取得した対象物体の計測点群から対象物体の検出を行う際に出現する側面を示す、図19(A)のXIX-XIX線に沿う断面図、(B)は各計測点の法線ベクトルと各計測点から視点方向へのベクトルとのなす角度を示す図である。
【図24】対象物体の凹部に相当する範囲に対して側面除外ステップを行わなかった場合に検出される対象物体を模式的に表す図である。
【発明を実施するための形態】
【0025】
<第1実施形態>
以下、本発明の第1実施形態について図面を参照しながら説明する。
図1は、本発明の第1実施形態に供試される対象体認識装置1の概略構成図である。
図1に示すように、対象体認識装置1は対象体である球体2の形状を仮想座標空間において表現する装置であり、支持体3に支えられた球体2の形状データを取得する3次元計測手段4と、3次元計測手段4にて取得された形状データから仮想座標空間における球体2を演算する演算手段6と、演算手段6にて演算された結果等を記憶するメモリ装置8と、演算された結果等を出力する外部出力手段10とを備える。
ここで、3次元計測手段4は、球体2上の測定点までの距離を計測することにより、または、球体2をステレオカメラなどの装置を利用して撮像することにより、球体2の形状データを取得する。
【0026】
演算手段6とメモリ装置8とは、図示しないがコンピュータに備えられている。演算手段6は当該コンピュータの中央演算処理装置(以下、CPUと略す)により構成され、メモリ装置8はRAM、ROM等を含んで構成されており、メモリ装置8には各プログラムが格納されている。
外部出力手段10は、シリアル通信、LANのネットワーク通信、画面出力、外部メモリ書き込み、またはファイル出力等により算出した結果を出力する。なお、この他にキーボード等の入力手段が演算手段6に接続されていてもよい。
【0027】
以下、このように構成された本発明に係る対象体認識装置1の球体検出方法について説明する。
図2は、対象体検出方法を示すフローチャートであり、図3は対象体の形状データを取得する形状データ取得ステップのフローチャートである。なお、後述するステップS12以降の各処理は、メモリ装置8に格納されている各プログラムを演算手段6にて実行することにより行われる。なお、球体2の半径は予めメモリ装置8に格納されているものとする。
【0028】
ステップS1では、球体2の形状データを取得する。詳しくは、図3に示す形状データ取得ステップのフローチャートに基づいて説明する。
ステップS11では、3次元計測手段4から球体2の形状データを計測点群として取得する。3次元計測手段4は、例えばレーザ距離計やステレオカメラ等を使用するものである。
【0029】
3次元計測手段4がレーザ距離計である場合、レーザ光の射出とその反射レーザの受光とにより3次元計測手段4の位置から球体2上の各計測点までの距離をレーザ計測し、計測した各距離データを3次元の計測点群として形状データを取得する。
また、3次元計測手段4がステレオカメラである場合、球体2を撮像することで、画像データに含まれる球体2の部分を3次元の計測点群として取得する。
また、3次元計測手段として、レーザ距離計やステレオカメラなどの計測データを記録した保存媒体を代わりに用いることもできる。
【0030】
ステップS12では、仮想座標空間において上述した各計測点をそれぞれ結んでいき、図9に示すように三角形メッシュを規定していき、対象体領域を生成する。このようにすることで、ステップS11で得られた形状データはポリゴンのように表面を持つ形状データとなり、各計測点から面の向きを決めることができる。図4に三角形メッシュ作成後の形状データの一例を示す。図4の矢印の向きは、3次元計測手段4の撮像方向を表している。
【0031】
ステップS13では、各計測点に相当する三角形の各頂点における法線ベクトルや頂点面積を求め、付加情報として追加する。他にもレーザの反射強度、またステレオカメラなどの計測手段を利用する場合には色の情報等を計算するというような付加的な情報を追加する。なお、法線ベクトルや反射強度、色の情報、頂点面積は付加情報の一例であり、他の情報を追加してもよい。
図2に戻り、続くステップS2では、上記ステップS13で求めた法線ベクトル及び頂点面積などの付加情報を用いて仮想座標空間における球中心の推定を行う。
【0032】
詳しくは、図5に対象体推定ルーチンのフローチャートが示されており、同フローチャートに従い、図6〜図18を参照しながら説明する。
ステップS40では、3次元計測手段4にて検出された球体の側面に相当する計測点を除外する。
【0033】
本来球体2に側面は存在しないが、使用する3次元計測手段4の種類によっては、図6(A)に示すように3次元計測手段4から見た球体2の境界付近の各計測点を認識処理する過程で側面2aが現れてしまうような計測点を取得する傾向のあるものが存在する。そこでステップS40では、図6(B)に示すように、各計測点P1、P2の法線ベクトルと、各計測点P1、P2から3次元計測手段4の視点Pvへのベクトルとのなす角度αから球体の側面に相当すると考えられる計測点を除外する。
【0034】
詳しくは、ステップS40では、側面除外ステップが実行される。詳しくは、図7に示す側面除外ステップは1つの計測点に対して実行される処理を示している。なお、本側面除外ステップは、全ての計測点に対して実行される。
ステップS401では、計測点の法線ベクトルと、計測点から3次元計測手段4の位置である視点方向に向かうベクトルとのなす角度αを求める。
【0035】
続くステップS402では、上記ステップS401で求めた角度αが側面と判定される閾値以下であるか否かを判定する。当該判定結果が真(Yes)の場合にはステップS403へ進み、偽(No)と判定された場合にはステップS404へ進む。
ステップS403では、計測点が球体の側面に位置しないとして、計測点を残す。
ステップS404では、計測点が球体の側面に位置するとして、計測点を除外する。
【0036】
そして、ステップS403またはS404の後にステップS401へ戻り、次の計測点に対して上記各ステップを繰り返す。
上記ステップS403、S404では、例えば図6(B)に示す計測点P1を球体の計測点として残し、計測点P2は球体の側面に相当するとして除外する処理を行う。
【0037】
図5に戻り、続くステップS41では領域分割ステップを実行する。ここでは、上記ステップS12で生成された対象体領域について、球体であると推定される対象体領域を分割していく。
詳しくは、図8−1、図8−2に示す領域分割ステップのフローチャートに従って、ステップS41で領域分割ステップが実行される。ここで、図8−1、図8−2に示す領域分割ステップは、全ての計測点に対して実行される。
【0038】
ステップS411では、全ての計測点に対して、各計測点に隣接する計測点のリストを作成する。
ステップS412では、全ての計測点の領域番号を初期化する。ここでは、初期値として領域番号に−1を設定する。
続くステップS413では、新領域番号newFieldに0を設定する。
【0039】
ステップS414では、変数iが全計測点数より小さい間、ステップS415以降の処理を行う。
ステップS415では、i番目の計測点iの領域番号が−1、即ち領域番号が割り当てられていないことを判定する。当該判定結果が真(Yes)の場合には計測点iに領域番号がまだ割り当てられていないとしてステップS416へ進む。一方、当該判定結果が偽(No)の場合には、計測点iに領域番号が既に割り当てられているとして、変数iをインクリメントしてステップS414へ戻り、次の計測点に対して処理を行う。
【0040】
ステップS416では、スタックSiに計測点iを追加する。
続くステップS417では、スタックSiから計測点を取り出す。本ステップで取り出した計測点を計測点jとする。
ステップS418では、計測点jの領域番号が−1、即ち領域番号が割り当てられているか否かを判定する。当該判定結果が真(Yes)の場合には、まだ領域番号が割り当てられていないとしてステップS419へ進む。一方、当該判定結果が偽(No)の場合には、計測点jに領域番号が既に割り当てられているとして、ステップS420へ進む。
【0041】
ステップS419では、計測点jの領域番号に、新領域番号newFieldを割り当てる。
ステップS420では、変数kが計測点jの計測点リストに含まれる全計測点数より小さい間、ステップS421、S422の処理を行う。
【0042】
ステップS421では、計測点j及び計測点jに隣接する計測点リストの中の計測点kが、同一領域内にあるための条件を満たしているか否かの判定を行う。同一領域内にあるための条件とは、例えば計測点jと計測点kとがそれぞれ有する法線ベクトルのなす角度が閾値以内であるか、計測点j、k間の距離が閾値以内であるか等の計測点に追加された付加情報を用いた条件に基づいて判定する。なお、法線ベクトルの角度や計測点間の距離の付加情報を判定条件としたが、色の情報を用いた判定条件やレーザの反射強度による判定条件等としてもよい。
当該判定結果が真(Yes)の場合には、計測点kは計測点jと同じ領域内にあるとしてステップS422へ進む。
【0043】
ステップS422では、計測点kを計測点jと同じ領域内にあるとして、計測点kに新領域番号newFieldを設定し、計測点jと同じ領域にある計測点を格納するスタックSjに計測点kを追加する。
一方、上記ステップS421の判定結果が偽(No)と判定された場合には同じ領域内にはいないとして、変数kをインクリメントしてステップS420へ戻り、次の計測点kに対して上述した処理を行う。
【0044】
ステップS423では、スタックSi内に計測点が残っていないか否かを判定する。当該判定結果が真(Yes)の場合にはスタックSi内の計測点の処理は終了したとしてステップS424へ進み、偽(No)と判定された場合には、まだスタックSi内に計測点が残っているとしてステップS417へ戻る。
ステップS424では、新領域番号newFieldをインクリメントする。
ステップS41を実行した結果を図9に示すように、各計測点に領域番号が付加されて対象体領域が分割される。
【0045】
図5に戻り、ステップS43では対象体領域抽出ステップ(対象物体領域抽出ステップ)を実行する。ここでは、上記ステップS41で対象体領域が分割されて形成した複数の対象体領域のうち、球体でない対象体領域を推定不可領域として除外する。
詳しくは、図10に示す対象体領域抽出ステップのフローチャートに基づいて説明する。
【0046】
図10に示す対象体領域抽出ステップは1つの対象体領域に対して実行する処理を示しており、全ての対象体領域に対して対象体領域抽出ステップが実行される。ここでは、仮想座標空間における球体2に相当する領域を抽出するものである。
ステップS431では、領域番号nに含まれる計測点数をカウントする。
ステップS432では、上記ステップS431でカウントした計測点数が閾値の範囲内、つまり、領域番号nに含まれる計測点数が球体と推定される点数分存在しているか否かを判定する。3次元計測手段4と球体2との距離に応じて球体2に相当する計測点の数は変化し、例えば3次元計測手段4と球体2に相当する領域との距離が遠くなるにつれて、球体に相当する計測点が少なくなる。従って閾値については、3次元計測手段4からの距離に応じた係数を乗算、または加減算し、球体に相当する領域からの距離が遠くなるほど球体と推定される計測点数が小さくなるようにする。当該判定結果が真(Yes)の場合にはステップS433へ進み、偽(No)である場合には次の領域番号に対して球体領域抽出ステップを実行する。
【0047】
ステップS433では、領域番号nに含まれる全ての計測点を含む直方体を生成する。
ステップS434では、上記ステップS433で生成した直方体を構成する各辺の長さが、球体2の半径に所定値を加減算または乗算した閾値の範囲内、つまりその領域の大きさが球体と推定される大きさに相当するか否かを判定する。当該判定結果が真(Yes)の場合にはステップS435へ進み、偽(No)である場合には次の領域番号に対して本球体領域抽出ステップを実行する。なお、上記ステップS432、S434では判定条件を閾値の範囲内としているが、閾値を変えることで判定条件を閾値以上または閾値以下とするようにしてもよい。また、ステップS433では直方体を生成しているが、形状はこれに限られず、例えば領域番号nに含まれる全ての計測点を含む三角錐や円柱などの幾何学的な形状を生成するようにしてもよい。この場合、上記ステップS434では、各形状の辺の長さや半径が球体2の半径に所定値を加算または乗算した閾値以下であるか否かを判定する。
【0048】
ステップS435では、領域番号nが球体と推定される対象体領域(推定領域)であるとして、領域番号リストに領域番号nを登録する。
そして、ステップS431へ戻り、次の領域番号に対して上記各ステップを繰り返す。
なお、上記ステップS432では、領域番号nにおける計測点数で球体と推定される領域であるか否かを判定したが、計測点数の代わりに領域番号nの面積を使用してもよい。ここで、閾値となる面積は球体2の半径から算出される面積である。
【0049】
図5に戻り、ステップS44では、対象体認識ステップ(対象物体認識ステップ)を実行する。ここでは、球推定アルゴリズムを使用して、仮想座標空間における仮の球(推定球体、以下、仮球とする)を生成する。
当該球推定アルゴリズムとは、任意に複数のサンプルを抽出して仮球を生成し、複数の仮球を生成した中から最もスコアの高いものを出力する方法で球体を推定していくものである。
【0050】
詳しくは、図11(A)に示すように、仮想座標空間にある計測点のうち任意の3点以上の点を選択する。ここでは例として3点P1〜P3を選択し、図11(B)のようにP1〜P3を通る仮球の位置を求める。そして、図11(C)に示すように、位置を求めた仮球の球面の所定範囲に含まれる計測点をスコアとして計上する。上述した処理を所定回数繰り返し、生成された仮球の中から図11(D)のように、最もスコアの高い仮球を出力する。
【0051】
上記所定回数は、十分に球体を検出できるように使用者によって指定された回数か、或いはN回仮球を生成したときに少なくとも1回は選択した全ての計測点が推定すべき球体の球面と判定される所定範囲内に含まれる確率を計算し、一定の確率以上になるように計測点の数から統計的に求められる試行回数Nである。
【0052】
対象体認識ステップのフローチャートを図12に示す。なお、図11では任意の3点を選択して仮球を生成することについて述べたが、本フローチャートでは、後述するように任意の4点を選択して仮球を生成する方法について示している。また、全ての計測点が球体表面にある仮球は生成できない場合があるので、球体表面から各計測点との距離の総和が最小となるように仮球の位置を求める。また、本フローチャートは、上記ステップS435で登録された領域番号リストにある全ての領域に対して行われる。
【0053】
ステップS441では、領域分割ステップで分割した領域の中の計測点から任意の4点を選択する。なお、本ステップでは4点を選択しているが、3点以上であればよい。
ステップS442では、ステップS441で選択した4点に最も近い仮球を生成し、生成した仮球の中心座標を算出する。ここで、生成される仮球は選択した4点の座標と球体の半径とから求められる。
【0054】
ステップS443では、仮球評価ステップを実行する。
図13に示す仮球評価ステップのフローチャートは、仮球が生成された領域番号iに存在し、且つ仮球の中心座標から仮球の半径に所定値を加算した範囲、つまり、仮球の中心から仮球の球面とされる範囲内にある全ての計測点に対して実行される。
ステップS444では、上記ステップS442で算出した仮球の中心座標と計測点との距離から仮球の半径を減算して、仮球の球面から計測点までの距離を算出する。
【0055】
ステップS445では、上記ステップS444で算出された仮球の球面からの距離が、仮球の球面にあると判定される所定の範囲内にあるか否かが判定される。当該判定結果が真(Yes)の場合にはステップS446に進み、偽(No)の場合には次の計測点に対して本仮球評価ステップを実行する。
ステップS446では、当該計測点が仮球に含まれるとして仮球のスコアを1増やす。
【0056】
そして、ステップS444へ戻り、次の計測点に対して上記各ステップを実行する。
本仮球評価ステップが領域番号iに存在する全ての計測点に対して実行されると、ステップS447へ進む。
ステップS447では、生成可能な仮球が全て生成されたか否かを判定する。当該判定結果が真(Yes)の場合にはステップS448へ進み、偽(No)の場合にはステップS441へ戻る。
【0057】
図12に戻り、ステップS448では、上記ステップS442で生成された仮球の中で最もスコアの高い仮球を選択する。
続くステップS449では、上記ステップS448で選択された仮球に対し、仮球の中心座標から仮球の半径に所定値を加算した範囲に存在する計測点を探索する。ここで探索される計測点は、仮球の球面と判定される範囲内に存在する計測点である。そして、探索された計測点を仮球を構成する計測点として登録する。
ステップS450では、上記ステップS448で選択された仮球を球体として認識し、中心座標を出力する。
【0058】
図5に戻り、ステップS46では、不正対象体削除ステップ(不正対象物体削除ステップ)を実行する。当該不正対象体削除ステップのフローチャートを図14に示す。図14に示すように、不正対象体削除ステップでは、上記ステップS44の対象体認識ステップで認識された球体のうち、誤って認識された球体を削除するものである。当該不正対象体削除ステップは、ステップS47として球体内計測点判定ステップ、ステップS48として表面積判定ステップ、ステップS49として重複球判定ステップを行うものである。なお、実行する順番はこれに限られない。
【0059】
図15に、球体内計測点判定ステップのフローチャートを示しており、当該フローチャートに基づいて以下に説明する。
ステップS471では、上記ステップS450で球体と認識された認識球体の中心から、認識球体の半径から所定値を減算した範囲にある計測点を探索する。
【0060】
ステップS472では、探索した計測点数が閾値未満であるか否かを判定する。ここで、認識球体の形状及び位置が球体2と略等しく認識されている場合、認識球体の内部の所定範囲に計測点は存在しないので理想的には計測点数は0となるが、ノイズなどの影響で0よりも大きくなることもあるため、閾値に基づいて判定する。当該判定結果が真(Yes)の場合には探索された計測点数が閾値未満であるとして本球体内計測点判定ステップを終了し、偽(No)の場合には探索された計測点数が閾値以上であるとしてステップS473へ進む。
ステップS473では、認識球体が誤った認識球体、即ち不正球体であるとして、認識結果から該当する球体を削除する。
【0061】
次に、図14に示す表面積判定ステップを実行する。図16に、表面積判定ステップのフローチャートを示しており、当該フローチャートに基づいて以下に説明する。
ステップS481では、推定した球体を構成する計測点の頂点面積を積算する。
【0062】
ここで、図17に頂点面積の概略図を示す。頂点面積とは、上述したステップS12では各計測点を頂点として三角形メッシュを生成したが、当該三角形メッシュの面積を各頂点に割り振った面積である。例えば図17に示すように、計測点P1の頂点面積はA1で示される面積であり、計測点P2の頂点面積は面積A2、計測点P3の頂点面積は面積A3、計測点P4の頂点面積は面積A4、計測点P5の頂点面積は面積A5、計測点P6の頂点面積は面積A6である。
理想的に球体を認識した場合、つまり3次元計測手段4で計測した球体2の形状及び位置を略等しく認識した場合は半球として検出されるので、積算された頂点面積は球体2の表面積の略半分となる。
【0063】
ステップS482では、上記ステップS481で積算した頂点面積が3次元計測手段4で計測された球体2と判定できる所定範囲内にあるか否かを判定する。当該判定結果が真(Yes)の場合には本表面積判定ステップを終了してステップS49へ進む。
【0064】
一方、上記ステップS482で偽(No)と判定された場合には、推定した球体が半球ではないとしてステップS483へ進む。
ステップS483では、球体の認識に失敗した不正球体であるとして、該当する球体の認識結果を削除する。
上述したステップS461〜S483までの処理は、上記ステップS44で球体と認識された全ての認識球体に対して実行する。その後、ステップS49へ進む。
【0065】
続くステップS49では、重複球判定ステップを実行する。重複球判定ステップの前までに実行した処理により認識された認識球体は、略等しい位置に複数の認識球体が検出されている場合がある。そこで、重複球判定ステップで重複している認識球体を不正球体として除外する処理を実行する。
【0066】
図18に重複球判定ステップのフローチャートを示す。ここでは、認識球体が格納されている認識球体リストA及び誤差リストAと、認識球体リストB及び誤差リストBとを使用する。認識球体リストAは重複する球を含み、認識球体リストBは重複した球体を認識球体リストAから除去したものである。誤差リストAは認識球体リストAに存在する各球体の誤差リストであり、誤差リストBは認識球体リストBに存在する各球体の誤差リストである。初期状態、つまり本重複球判定ステップを実行する前の状態では、認識球体リストBに設定されている球体の数は0であり、誤差リストBには何も設定されていない状態である。図18は認識球体リストAに存在する1つの球体iに対して行う処理を示しており、本ステップは認識球体リストAに存在する全ての球体に対して実行される。
【0067】
ステップS491では、認識球体の誤差を評価する(誤差評価ステップ)。全ての認識球体に対して誤差を求め、当該誤差が球体と判定される誤差よりも小さい認識球体を認識球体リストAに追加し、当該認識球体の誤差を誤差リストAに設定する。ここでは誤差の一例として、球体を構成する各計測点と球体表面との間の距離の総和とする。
ステップS492では、認識球体リストAの球体が認識球体リストBに存在するか否かを判定するためのマッチングフラグを初期化する。ここで、認識球体リストAで選択した球体を球体iとする。
後述するステップS493〜S498は、認識球体リストBに存在する各球体に対して実行する。
【0068】
ステップS493では、認識球体リストBに存在する全ての球体が選択されたか否かを判定する。当該判定結果が偽(No)と判定された場合にはステップS494へ進む。
続くステップS494では、認識球体リストAの球体の中心座標と認識球体リストBの球体の中心座標との距離を算出する。ここで、認識球体リストBで選択した球体を球体jとする。
ステップS495では、上記ステップS494で算出された距離が、同一の球体と判定できる閾値より短いか否かを判定する。当該判定結果が真(Yes)の場合にはステップS496へ進む。
【0069】
ステップS496では、認識球体リストAの球体iと認識球体リストBの球体jとが同一であるとして、マッチングフラグに1を設定する。
ステップS497では、誤差リストAの球体iの誤差が誤差リストBの球体jの誤差よりも小さいか否かを判定する。つまり、認識球体リストAの球体iが認識球体リストBの球体jよりも精度がよいか否かを判定する。当該判定結果が真(Yes)の場合にはステップS498へ進む。
【0070】
ステップS498では、認識球体リストAの球体iを認識球体リストBの球体jに上書きする。また、誤差リストAの球体iの誤差を誤差リストBの球体jの誤差に上書きする。その後、ステップS493へ戻り、認識球体リストBにある球体j+1に対して処理を行う。
一方、ステップS495及びS497で偽(No)と判定された場合には、認識球体リストBに存在する次の球体j+1に対して処理を実行するためにステップS493へ戻る。
【0071】
そして、上記ステップS493で真(Yes)と判定された場合にはステップS499へ進む。
ステップS499では、マッチングフラグが0であるか否かを判定する。即ち、上記ステップS493〜S498の中で認識球体リストBの中に認識球体リストAの球体iと重複する球体が見つからなかったか否かを判定する。当該判定結果が真(Yes)の場合にはステップS500へ進む。
【0072】
ステップS500では、認識球体リストBの末尾に認識球体リストAの球体iを追加する。また、誤差リストBの末尾に誤差リストAの球体iの誤差を追加する。
一方、上記ステップS499で偽(No)と判定された場合は、認識球体リストAに存在する次の球体i+1に対して本重複球判定ステップを実行する。
【0073】
上記ステップS491〜S500を認識球体リストAにある全ての球体に対して行うことにより、認識球体リストBには、認識球体リストAにある球体の中で略同一の位置に重複して存在する球体がある場合には当該重複する球体の中から最も誤差の小さい球体が設定され、また重複する球体がない、つまり1つの球体として認識された認識球体である場合には1つの球体として設定される。
認識球リストAに存在する全ての球体に対して本重複球判定ステップが実行されると、上記対象体推定ルーチンを終了し、検出した球体の情報を外部出力手段10に出力する。
【0074】
このように、本実施形態によれば、3次元計測手段4にて計測された球体2の形状データを3次元の計測点群として取得し、仮想座標空間で計測点群から生成された対象体領域に対して領域分割を行い、球体でない領域を除外し、球推定アルゴリズムにより求められた認識球体を球体として検出する。
これにより、仮想座標空間における対象体領域から球体に相当する位置を推定することができるとともに、球体と推定された推定領域に限定して球推定アルゴリズムを実行するので、計算量をより少なくすることができ、より高速に球体を検出することができる。
【0075】
また、計測点に含まれるノイズ等の外れ点を除外することができるので、より高精度に球体を検出することができる。
そして、球体の側面として検出されてしまう計測点を除外することにより、全ての計測点中に含まれるノイズ等の外れ点を除外することができるので、検出する球体の中心座標が視点から見て略正確な中心位置よりも奥方向に推定されることを防止することができ、高精度に球体を検出することができる。
【0076】
また、対象体領域が分割された複数の各対象体領域に対して、対象体領域に含まれる計測点数または対象体領域の面積と、対象体領域に含まれる全ての計測点を含む直方体の各辺の長さ等の計測点を外包する幾何学的な形状の大きさとが球体を推定するために必要な条件を満たしていない場合は当該対象体領域を除外することにより、球体の推定に使用する対象体領域を減少させることができるので、球体の誤検出を防ぐことができ、高精度に球体を検出することができる。また、計算量がより少なくなるので、球体の検出をより高速に行うことができる。
【0077】
また、不正な球体を除外するために、認識球体内の所定範囲にある計測点数の探索、認識球体を構成する計測点の頂点面積を積算した面積からそれぞれ不正な球体を除外することにより、球体の誤検出を防止することができ、高精度に球体を検出することができる。
また、認識球体の中から、略同一形状で略同一位置に重複して存在する認識球体を除外することにより、球体の誤検出を防止することができるので、より高精度に球体を検出することができる。
【0078】
<側面除外の変形例>
次に、上述した側面除外の変形例について、図面を参照しながら以下に説明する。本変形例は、上記実施形態に対して、対象体を球体に限らず、例えば三角錐や立方体等、様々な形状の物体を使用する点が異なり、その他の構成は共通している。従って、共通箇所の説明は省略し、相違点について以下に説明する。
【0079】
本実施形態では、図19(A)に対象体の上面図を示すように、略直方体に凹部が形成されている物体を対象物体102として用いるものとする。図19(B)に図19(A)のXIX-XIX線に沿う断面図を示すように、対象物体102は3次元計測手段4に対して凹部103を向けて配置される。また、図19(B)に示すように、対象物体102の凹部103は、3次元計測手段4の方向に向けて配置される。
【0080】
このように構成された本実施形態に係る対象体認識装置101の対象物体検出方法における側面除外について、以下に説明する。
図20は、対象体の形状データ取得ステップの変形例を示すフローチャートである。なお、後述するステップS120以降の各処理は、メモリ装置8に格納されている各プログラムを演算手段6で実行することにより行われる。
【0081】
ステップS110では、3次元計測手段4を用いて、対象物体102の形状データを3次元の計測点群として取得する。
【0082】
ステップS120では、後述する側面除外ルーチンで使用する、側面除外の処理を行う対象範囲を設定する。後述する側面除外ルーチンでは、上記ステップS110で取得した3次元の計測点群の中で、側面のないところに側面として現れてしまう計測点を除外する処理を行うが、本ステップでは、対象物体102の形状に応じて、この側面を除外する処理を適用する範囲を設定する。本変形例における対象物体102では、図21に示すように、例えば凹部103を含む範囲Sを除く範囲Tを側面除外の処理を行う対象として設定する。
【0083】
ステップS130では、仮想座標空間において、上述した各計測点をそれぞれ結んでいき、図9に示すような三角形メッシュを規定していき、対象体領域を生成する。
ステップS140では、各計測点に相当する三角形の各頂点における法線ベクトルや頂点面積を求め、付加情報として追加する。他にもレーザの反射強度や、ステレオカメラ等の計測手段を利用する場合には、色の情報等の付加的な情報を付加情報として追加するようにしてもよい。
【0084】
図22に、図5に示したステップS40の側面除外ステップの変形例を示すフローチャートを示している。図22のフローチャートは、1つの計測点に対して実行される処理を示している。なお、この側面除外ステップは、全ての計測点に対して実行される。
【0085】
この変形例で計測対象としている対象物体102は台形柱であり、3次元計測手段4から離間する方向に対象物体102の側面が互いに近付く形状なので、3次元計測手段4から側面は見えない。しかし、上記実施形態でも述べたが、図23(A)に示すように、3次元計測手段4の種類によって3次元計測手段4から見た対象物体102の境界付近の計測点を認識処理する過程で、側面102aが現れてしまうような計測点を取得してしまう傾向のあるものが存在する。そこで、図22に示すフローチャートでは、図23(B)に示すように、例えば計測点P1〜P3のそれぞれの法線ベクトルと、計測点P1〜P3から3次元計測手段4の視点Pvに向かうベクトルとのそれぞれのなす角度αから、対象物体102の側面に相当する計測点のうち、上記ステップS120で設定した側面除外の処理を適用する範囲にある計測点を除外する処理を行う。
【0086】
ステップS601では、計測点の法線ベクトルと、当該計測点から3次元計測手段4の視点に向かうベクトルとのなす角度αを求める。
ステップS602では、上記ステップS601で求めた角度αが、対象物体102の側面102aと判定される閾値以下であるか否かを判定する。当該判定結果が真(Yes)の場合にはステップS603へ進む。
【0087】
ステップS603では、当該計測点が対象物体102の側面に位置していないとして、計測点を残す。
一方、上記ステップS602の判定結果が偽(No)の場合には、当該計測点が対象物体102の側面に位置しているとして、ステップS604へ進む。
【0088】
ステップS604では、当該計測点の位置が、上記ステップS120で設定した側面除外の適用範囲内にあるか否かを判定する。当該判定結果が真(Yes)の場合には、計測点が側面除外の範囲内TにあるとしてステップS605へ進み、判定結果が偽(No)の場合には、計測点が側面除外の適用範囲外SにあるとしてステップS603へ進む。
ステップS605では、計測点が対象物体102の側面に相当する位置にあるとして、当該計測点を除外する。
【0089】
ステップS606では、全ての計測点に対して実行されたか否かを判定する。当該判定結果が真(Yes)の場合には、全ての計測点に対して側面を除外する処理が行われたとして、ステップS607へ進む。一方、判定結果が偽(No)と判定された場合には、全ての計測点の側面除外処理が終了していないとしてステップS601へ戻り、次の計測点に対して上記各ステップを繰り返す。
【0090】
ステップS607では、対象物体に相当する3次元形状が得られたか否かを判定する。当該判定結果が真(Yes)の場合には、対象物体に相当する3次元形状が得られたとして側面除外ステップを終了する。一方、当該判定結果が偽(No)の場合には、対象物体に相当する3次元形状が得られなかった、即ち得られた3次元形状の凹部が対象物体102の凹部103に相当する形状ではなかったとしてステップS120へ戻り、対象物体102の側面を除外する範囲を再度設定する。
【0091】
上記ステップS604の判定処理を行わない場合、図24に示すように、凹部103の内壁に相当する計測点も側面と判定されて当該計測点が除外され、3次元計測手段4から見た凹部103に相当する領域が貫通孔103aとして現れてしまう。しかし、上記ステップS604の処理を行うことによって、側面ではない領域に存在する計測点が側面として除外されてしまうことを防止でき、凹部103の形状を得ることができる。
【0092】
このように、3次元計測手段4で取得した計測点群に対して側面除外の適用範囲内にある計測点に側面を除外する処理を行うことにより、球体のみならず、種々の形状の対象物体102から取得した計測点群を認識処理する際に側面が現れても、側面を除外して、精度よく対象物体102を認識することができる。
【0093】
以上で実施形態の説明を終えるが、本発明は上述した実施形態に限定されるものではない。
例えば、上記実施形態では球体2の半径情報が予めメモリ装置8に格納されているが、球体2の半径がメモリ装置8に格納されていない場合でも、上記対象体推定ルーチンを行ってよい。半径がわからない場合には、想定される最大の球体の大きさから半径を算出し、ステップS43における対象体領域抽出ステップのステップS434で当該半径に所定値を加算した閾値で判定を行い、ステップS44の対象体認識ステップは必ず4点を選択するようにステップS441〜S450を実行するようにすればよい。
【0094】
そして、上記実施形態では球体2の形状データを計測点群として取得しているが、形状データをボクセルデータとして取得する場合でも、当該ボクセルデータを点群とみなして上記対象体推定ルーチンを行ってもよい。
【符号の説明】
【0095】
1 対象体認識装置
2 球体
4 3次元計測手段
6 演算手段
8 メモリ装置
102 対象物体
【特許請求の範囲】
【請求項1】
計測対象となる対象物体の形状を仮想座標空間において表現する対象物体の検出方法であって、
3次元計測手段から3次元の計測点群として対象物体の形状データを取得する形状データ取得ステップと、
前記形状データから生成された仮想座標空間において前記対象物体が占める対象体領域を、前記計測点群の各計測点の付加情報に従って複数の対象体領域に区画する領域分割ステップと、
前記分割された各対象体領域の中から前記対象物体と推定される推定領域を抽出する対象物体領域抽出ステップと、
前記推定領域毎に推定される単数又は複数の推定対象物体を生成し、該推定対象物体の中から前記対象物体と認識される推定対象物体を認識対象物体として選択する対象物体認識ステップと、
を備えたことを特徴とする対象物体の検出方法。
【請求項2】
前記形状データ取得ステップの後から前記対象物体認識ステップの前までの間に、前記形状データ取得ステップで取得した前記計測点群の各計測点における法線ベクトルと、該各計測点と前記3次元計測手段の位置である視点に向かうベクトルとのなす角度が前記対象物体の側面と判定される閾値より大きい場合に、該当する計測点を除外する側面除外ステップをさらに備えることを特徴とする請求項1に記載の対象物体の検出方法。
【請求項3】
前記側面除外ステップは、前記計測点群における前記対象物体の側面を除外する範囲に計測点が存在する場合に、前記閾値より大きい角度となる計測点を除外するものであり、
前記計測点群の全てに対して前記角度の判定が行われた後、残った計測点から形成される形状が、前記対象物体に相当する形状であることを判定するステップを有することを特徴とする請求項2に記載の対象物体の検出方法。
【請求項4】
前記対象物体領域抽出ステップは、前記領域分割ステップにて区画された前記複数の対象体領域の中で、同一の対象体領域における計測点数または面積が前記対象物体と推定される閾値の範囲内の場合、または前記同一の対象体領域における計測点を全て含む幾何学的形状の大きさが前記対象物体と推定される閾値の範囲内の場合に、該当する対象体領域を対象物体と推定される領域として抽出することを特徴とする請求項1乃至3のいずれかに記載の対象物体の検出方法。
【請求項5】
前記認識対象物体のうち、誤認識した対象物体を不正対象物体として削除する不正対象物体削除ステップを備えることを特徴とする請求項1乃至4のいずれかに記載の対象物体の検出方法。
【請求項6】
前記不正対象物体削除ステップは、前記対象物体の表面積が前記対象体である対象物体の表面積と判定される範囲外である場合に、該当する対象物体を削除する表面積判定ステップを含むことを特徴とする請求項5に記載の対象物体の検出方法。
【請求項7】
前記対象物体は球体であって、
前記不正対象物体削除ステップは、各球体の中心座標間の距離を算出し、該距離が同一の球体と判定される閾値より短い場合に、該当する球体を削除する重複球判定ステップを含むことを特徴とする請求項5に記載の対象物体の検出方法。
【請求項8】
前記対象物体は球体であって、
前記不正対象物体削除ステップは、前記球体の中心から前記球体の半径より短い前記球体の内部の範囲に計測点が存在する場合に、該当する球体を削除する球体内計測点判定ステップを含むことを特徴とする請求項5に記載の対象物体の検出方法。
【請求項9】
計測対象となる対象物体の形状を仮想座標空間において表現する対象物体の検出装置であって、
3次元計測手段から3次元の計測点群として対象物体の形状データを取得する形状データ取得手段と、
前記形状データから生成された仮想座標空間において前記対象物体が占める対象体領域を、前記計測点群の各計測点の付加情報に従って複数の対象体領域に区画する領域分割手段と、
前記分割された各対象体領域の中から前記対象物体と推定される推定領域を抽出する対象物体領域抽出手段と、
前記推定領域毎に推定される単数又は複数の推定対象物体を生成し、該推定対象物体の中から前記対象物体と認識される推定対象物体を認識対象物体として選択する対象物体認識手段と、
を備えたことを特徴とする対象物体の検出装置。
【請求項10】
前記形状データ取得手段で取得した前記計測点群の各計測点における法線ベクトルと、該各計測点と前記3次元計測手段の位置である視点に向かうベクトルとのなす角度が前記対象物体の側面と判定される閾値より大きい場合に、該当する計測点を除外する側面除外手段をさらに備えることを特徴とする請求項9に記載の対象物体の検出装置。
【請求項11】
前記側面除外手段は、前記計測点群における前記対象物体の側面を除外する範囲に存在する計測点に対して、前記閾値より大きい角度となる計測点を除外することを特徴とする請求項10に記載の対象物体の検出装置。
【請求項12】
コンピュータを、
3次元計測手段から3次元の計測点群として測定対象となる対象物体の形状データを取得する形状データ取得手段、
前記形状データから生成された仮想座標空間において前記対象物体が占める対象体領域を、前記計測点群の各計測点の付加情報に従って複数の対象体領域に区画する領域分割手段、
前記分割された各対象体領域の中から前記対象物体と推定される推定領域を抽出する対象物体領域抽出手段、
前記推定領域毎に推定される単数又は複数の推定対象物体を生成し、該推定対象物体の中から前記対象物体と認識される推定対象物体を認識対象物体として選択する対象物体認識手段、
として機能させるためのプログラム。
【請求項1】
計測対象となる対象物体の形状を仮想座標空間において表現する対象物体の検出方法であって、
3次元計測手段から3次元の計測点群として対象物体の形状データを取得する形状データ取得ステップと、
前記形状データから生成された仮想座標空間において前記対象物体が占める対象体領域を、前記計測点群の各計測点の付加情報に従って複数の対象体領域に区画する領域分割ステップと、
前記分割された各対象体領域の中から前記対象物体と推定される推定領域を抽出する対象物体領域抽出ステップと、
前記推定領域毎に推定される単数又は複数の推定対象物体を生成し、該推定対象物体の中から前記対象物体と認識される推定対象物体を認識対象物体として選択する対象物体認識ステップと、
を備えたことを特徴とする対象物体の検出方法。
【請求項2】
前記形状データ取得ステップの後から前記対象物体認識ステップの前までの間に、前記形状データ取得ステップで取得した前記計測点群の各計測点における法線ベクトルと、該各計測点と前記3次元計測手段の位置である視点に向かうベクトルとのなす角度が前記対象物体の側面と判定される閾値より大きい場合に、該当する計測点を除外する側面除外ステップをさらに備えることを特徴とする請求項1に記載の対象物体の検出方法。
【請求項3】
前記側面除外ステップは、前記計測点群における前記対象物体の側面を除外する範囲に計測点が存在する場合に、前記閾値より大きい角度となる計測点を除外するものであり、
前記計測点群の全てに対して前記角度の判定が行われた後、残った計測点から形成される形状が、前記対象物体に相当する形状であることを判定するステップを有することを特徴とする請求項2に記載の対象物体の検出方法。
【請求項4】
前記対象物体領域抽出ステップは、前記領域分割ステップにて区画された前記複数の対象体領域の中で、同一の対象体領域における計測点数または面積が前記対象物体と推定される閾値の範囲内の場合、または前記同一の対象体領域における計測点を全て含む幾何学的形状の大きさが前記対象物体と推定される閾値の範囲内の場合に、該当する対象体領域を対象物体と推定される領域として抽出することを特徴とする請求項1乃至3のいずれかに記載の対象物体の検出方法。
【請求項5】
前記認識対象物体のうち、誤認識した対象物体を不正対象物体として削除する不正対象物体削除ステップを備えることを特徴とする請求項1乃至4のいずれかに記載の対象物体の検出方法。
【請求項6】
前記不正対象物体削除ステップは、前記対象物体の表面積が前記対象体である対象物体の表面積と判定される範囲外である場合に、該当する対象物体を削除する表面積判定ステップを含むことを特徴とする請求項5に記載の対象物体の検出方法。
【請求項7】
前記対象物体は球体であって、
前記不正対象物体削除ステップは、各球体の中心座標間の距離を算出し、該距離が同一の球体と判定される閾値より短い場合に、該当する球体を削除する重複球判定ステップを含むことを特徴とする請求項5に記載の対象物体の検出方法。
【請求項8】
前記対象物体は球体であって、
前記不正対象物体削除ステップは、前記球体の中心から前記球体の半径より短い前記球体の内部の範囲に計測点が存在する場合に、該当する球体を削除する球体内計測点判定ステップを含むことを特徴とする請求項5に記載の対象物体の検出方法。
【請求項9】
計測対象となる対象物体の形状を仮想座標空間において表現する対象物体の検出装置であって、
3次元計測手段から3次元の計測点群として対象物体の形状データを取得する形状データ取得手段と、
前記形状データから生成された仮想座標空間において前記対象物体が占める対象体領域を、前記計測点群の各計測点の付加情報に従って複数の対象体領域に区画する領域分割手段と、
前記分割された各対象体領域の中から前記対象物体と推定される推定領域を抽出する対象物体領域抽出手段と、
前記推定領域毎に推定される単数又は複数の推定対象物体を生成し、該推定対象物体の中から前記対象物体と認識される推定対象物体を認識対象物体として選択する対象物体認識手段と、
を備えたことを特徴とする対象物体の検出装置。
【請求項10】
前記形状データ取得手段で取得した前記計測点群の各計測点における法線ベクトルと、該各計測点と前記3次元計測手段の位置である視点に向かうベクトルとのなす角度が前記対象物体の側面と判定される閾値より大きい場合に、該当する計測点を除外する側面除外手段をさらに備えることを特徴とする請求項9に記載の対象物体の検出装置。
【請求項11】
前記側面除外手段は、前記計測点群における前記対象物体の側面を除外する範囲に存在する計測点に対して、前記閾値より大きい角度となる計測点を除外することを特徴とする請求項10に記載の対象物体の検出装置。
【請求項12】
コンピュータを、
3次元計測手段から3次元の計測点群として測定対象となる対象物体の形状データを取得する形状データ取得手段、
前記形状データから生成された仮想座標空間において前記対象物体が占める対象体領域を、前記計測点群の各計測点の付加情報に従って複数の対象体領域に区画する領域分割手段、
前記分割された各対象体領域の中から前記対象物体と推定される推定領域を抽出する対象物体領域抽出手段、
前記推定領域毎に推定される単数又は複数の推定対象物体を生成し、該推定対象物体の中から前記対象物体と認識される推定対象物体を認識対象物体として選択する対象物体認識手段、
として機能させるためのプログラム。
【図1】


【図2】
【図3】
【図5】
【図6】
【図7】
【図8−1】
【図8−2】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図4】
【図2】
【図3】
【図5】
【図6】
【図7】
【図8−1】
【図8−2】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図4】
【公開番号】特開2013−47662(P2013−47662A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2012−97848(P2012−97848)
【出願日】平成24年4月23日(2012.4.23)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願日】平成24年4月23日(2012.4.23)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]