
対象物確認装置及び方法
【課題】低コストで簡単に端子台の端子にタグを取り付けることあるいは、端子台の端子にタグを取り付けることなく目的の作業支援を行う。
【解決手段】本発明は、タグを用いて現場機器の対象物の接続を確認する為の対象物確認装置であって、対象物に取り付けられたタグから、そのIDを入力するID入力手段、ID入力手段の出力から、対象物に関する第1の情報を得る第1の対象識別手段、タグの位置に相当する情報を取得する位置取得手段、位置取得手段の出力から、対象物に関する第2の情報を得る第2の対象識別手段、第1の情報と第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認する判定手段とからなる。
【解決手段】本発明は、タグを用いて現場機器の対象物の接続を確認する為の対象物確認装置であって、対象物に取り付けられたタグから、そのIDを入力するID入力手段、ID入力手段の出力から、対象物に関する第1の情報を得る第1の対象識別手段、タグの位置に相当する情報を取得する位置取得手段、位置取得手段の出力から、対象物に関する第2の情報を得る第2の対象識別手段、第1の情報と第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認する判定手段とからなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、対象物確認装置及び方法に係り、特にプラントなどの建設・保守における結線箇所の確認作業を支援するための対象物確認装置及び方法に関する。
【背景技術】
【0002】
プラントなどの建設・保守においては、現場機器とケーブルを電気的に結線し、あるいは結線箇所の確認作業を行う。係る結線に誤接続があってはならないことから、正しい接続相手を識別可能とする為の工夫を施し、かつその上で、多大の人手と時間を要して接続箇所確認作業を行っている。
【0003】
この点に関して、特許文献1における作業支援は、以下のように行なわれる。接続箇所にRFIDを取り付けておき、RFIDリーダを用いてその情報を読み取る。他方で、回路情報・RFID情報・作業手順情報などを記憶したデータベースを準備しておく。作業者は、端末にRFIDリーダからの情報を取り込み、データベースにアクセスして必要な情報を得ることで接続箇所確認などの現場作業を円滑に行うことができる。
【0004】
また、特許文献2における作業支援は、以下のように行なわれる。現場機器や計器などの信号ケーブルを配線・結線する際に、結線作業結果より、入出力信号リストを自動的に作成し、そのリストにこだわらずに結線作業を行なうことで、作業の効率化を高める入出力制御装置を得る。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−151383号公報
【特許文献2】特開2006−163490号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献の手法では、接続対象現場機器、例えば端子台端子にRFIDなどのタグを予め取り付けている。しかしながら、タグのIDを用いた端子台端子とケーブル芯線の接続支援において、端子台の端子に予めタグを取り付けるのは、コストと手間がかかる。また、端子台端子によっては、RFIDなどのタグを取り付けることが(狭くて)できない、あるいは困難というものもある。
【0007】
以上のことから、低コストで簡単に端子台の端子にタグを取り付けることあるいは、端子台の端子にタグを取り付けることなく目的の作業支援を行うことが課題となる。
【課題を解決するための手段】
【0008】
本発明は、タグを用いて現場機器の対象物の接続を確認する為の対象物確認装置であって、対象物に取り付けられたタグから、そのIDを入力するID入力手段、ID入力手段の出力から、対象物に関する第1の情報を得る第1の対象識別手段、タグの位置に相当する情報を取得する位置取得手段、位置取得手段の出力から、対象物に関する第2の情報を得る第2の対象識別手段、第1の情報と第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認する判定手段とからなる。
【0009】
また、第1の対象識別手段は、タグが設置された第1の対象物の情報をタグIDに関連つけて記憶する第1のデータベースを含み、第2の対象識別手段は、第1の対象物に接続された第2の対象物の情報を位置に相当する情報に関連つけて記憶する第2のデータベースを含み、さらに第1の対象物と第2の対象物の正しい組み合わせを記憶する第3のデータベースを備える。
【0010】
また、第1の対象物と第2の対象物は、現場機器の端子とケーブルとされる。
【0011】
また、位置取得手段は、ID入力手段に取り付けられた信号発振手段と、発振手段の信号を受信する信号受信手段と、信号受信手段の出力からタグの位置を得る位置決定手段からなる。
【0012】
また、位置取得手段は、対象物を覆い、かつ表面にその位置が明らかな複数のタグを備えたユニバーサルプレートと、ユニバーサルプレート上の位置から対象物上の位置を定める位置決定手段からなる。
【0013】
また、位置取得手段は、対象物上のタグ位置情報を備える記憶手段を含み、ID入力手段によるタグの読み取りは定まった順序に従い実行される。
【0014】
本発明は、タグを用いて現場機器の第1の対象物と第2の対象物の接続を確認する為の対象物確認装置であって、タグを備えた第1の対象物の情報を、タグIDに関連つけて記憶する第1のデータベース、第1の対象物に接続された第2の対象物の情報を前記タグの位置に相当する情報に関連つけて記憶する第2のデータベース、第1の対象物と第2の対象物の正しい組み合わせを記憶する第3のデータベースを備える。
【0015】
本発明は、タグを用いて現場機器の対象物の接続を確認する為の対象物確認方法であって、対象物に取り付けられたタグから、そのIDを入力して対象物に関する第1の情報を得、タグの位置に相当する情報を取得して対象物に関する第2の情報を得、第1の情報と第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認する。
【0016】
本発明は、タグを用いて現場機器の第1の対象物と第2の対象物の接続を確認する為の対象物確認方法であって、第1の対象物に取り付けられたタグから、そのIDを入力して第1の対象物に関する第1の情報を得、タグの位置に相当する情報を取得して第2の対象物に関する第2の情報を得、第1の対象物についての第1の情報と第2の対象物についての第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認する。
【発明の効果】
【0017】
端子台端子とケーブル芯線の接続支援において、コストや手間を低減しかつ信頼性を確保できる。
【図面の簡単な説明】
【0018】
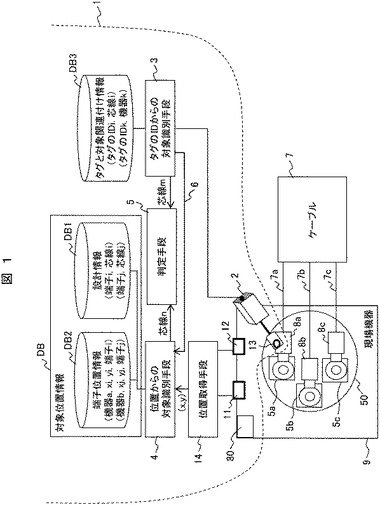
【図1】実施例1の、ケーブル接続支援装置の構成図の例を示す図。
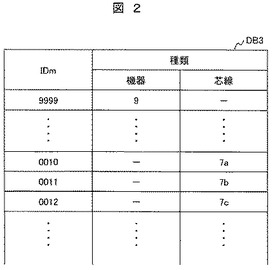
【図2】実施例1の、タグと対象関連付け情報データベースDB3の例を示す図。
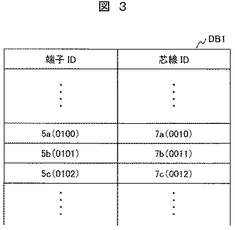
【図3】実施例1の、設計情報データベースDB1の例を示す図。
【図4a】実施例1の、機器上の位置をX,Y座標軸上に表示した図。
【図4b】実施例1の、端子位置情報データベースDB2の例を示す図。
【図5】図1の接続支援装置の各部動作を模式的に示した図。
【図6】図1の接続支援装置の動作フローを示す図。
【図7】実施例2の、ケーブル接続支援装置の構成図の例を示す図。
【図8】実施例2の、タグと対象関連付け情報データベースDB3の例を示す図。
【図9a】実施例2の、タグを備えたプレートを示す図。
【図9b】実施例2の、プレートの位置をX,Y座標軸上に表示した図。
【図9c】実施例2の、端子の位置をX,Y座標軸上に表示した図。
【図10】実施例2の、プレート位置情報データベースDB4の例を示す図。
【図11】実施例2の、端子位置情報データベースDB2の例を示す図。
【図12】図7の接続支援装置の動作フローを示す図。
【図13】図13の動作フローの一部詳細フローを示す図。
【図14a】実施例2で用いるユニバーサルプレートの一例を示す図。
【図14b】実施例2で用いるユニバーサルプレートの一例を示す図。
【図14c】実施例2で用いるユニバーサルプレートの一例を示す図。
【図14d】実施例2で用いるユニバーサルプレートの一例を示す図。
【図15】実施例2で用いるユニバーサルプレートの一例を示す図。
【図16】実施例3の、ケーブル接続支援装置の構成図の例を示す図。
【図17】実施例3の、接続支援を行う装置の動作フローを示す図。
【図18】PC画面表示例を示す図。
【図19】端子順序定義情報の定義モードでの画面表示例を示す図。
【図20】図19の操作を受け付ける手順を示すフロー図。
【図21】実施例3の接続チェックで芯線RFIDをリードした画面を示す図。
【発明を実施するための形態】
【0019】
以下、本発明の実施例について、図面を用いて説明する。
【実施例1】
【0020】
本実施例では、端子台端子とケーブル芯線の接続支援を、タグのIDを用いて行う装置の例を説明する。プラントやビルのケーブル接続作業において、設計通りにケーブルが接続されたかを確認するのに用いる。この場合に、接続確認の対象となる対象物が端子台端子とケーブル芯線であり、第1の対象物(例えばケーブル芯線)と第2の対象物(例えば端子台端子)が正しい相手と接続されていることを確認する。
【0021】
図1は、本実施例のケーブル接続支援装置の構成図の例である。この図において、9が、端子台50を備える現場機器である。現場には現場機器が複数あるので、特定の現場機器(以下単に機器という)であることを明確にするために、機器9には当該機器のIDを示すタグ80が設けられている。また機器の端子台50には、端子5a、5b、5cが備えられており、各端子5a、5b、5cにはそれぞれケーブル7の芯線7a、7b、7cが接続されている。芯線7a、7b、7cには、各々タグ8a、8b、8cがはめられている。
【0022】
本実施例では、現場機器9の端子台50の各端子5a、5b、5cが、ケーブル7の芯線7a、7b、7cに接続された上記構成において、設計通りにケーブルが接続されていることを、ケーブル接続支援装置1を用いて確認する。
【0023】
ケーブル接続支援装置1は、接続確認のための対象識別を、タグIDからの情報と、接続位置情報の2つの観点から行う。それぞれの対象識別部は、いずれも入力手段と、対象識別手段と、データベースから構成されている。以下、タグIDによる対象識別部、接続位置による対象識別部について順次説明する。
【0024】
まず、タグIDによる対象識別部について説明する。この対象識別部においては、芯線7a、7b、7cに、各々タグ8a、8b、8cが嵌められていることを前提とする。また、現場機器9には機器ごとに固有の識別情報が記憶されたタグ80が備えられている。ここで、タグは、RFIDまたはバーコードまたはそのほかのICタグであり、タグのID入力手段2により、タグのIDまたは番号を読み取ることができる。以降、タグのIDまたは番号をタグのIDと称する。なお、固有の番号のほうが信頼性は向上するが、固有の番号でなくても一定の効果を得ることができる。
【0025】
現場での作業は、最初に識別対象現場機器9のタグ80を確認し、次に芯線7a、7b、7cに設置されたタグ8a、8b、8cを確認する。
【0026】
機器のタグ80や、芯線7a、7b、7cに設置されたタグ8a、8b、8cに記憶されたIDまたは番号は、タグのID入力手段2を、検査員がタグ近辺にかざすことにより、信号として外部に取り出される。ID入力手段2は、タグのIDまたは番号を読み取ると、タグのIDからの対象識別手段3に、タグのIDまたは番号を渡す。タグのIDからの対象識別手段3は、タグのIDまたは番号を受けると、タグと対象関連付け情報データベースDB3を参照する。
【0027】
タグと対象関連付け情報データベースDB3は、例えば図2のように構成されており、機器9、並びに芯線のIDが記憶されている。例えば、この現場機器9のタグ80に付与された機器のIDが9999であり、この機器についての検知されたコードIDmが0010であるとき、これは対象物が芯線7aであり、IDmが0011であるとき、これは対象物が芯線7bである。タグのIDからの対象識別手段3は、タグと対象関連付け情報データベースDB3から、機器9並びに芯線7の種類と、対象物を示す情報を得る。
【0028】
タグからの対象識別手段3は、データベースDB3から入手した機器9並びに芯線7の情報を確認し、この種類が現場機器9であれば、読み取ったIDを、信号線6を介して位置からの対象識別手段4に渡す。識別の最初にタブ80を読み取り、機器が確認できたときには、以後この機器9における芯線7の識別が実行されることを認識する。
【0029】
また、種類が芯線7のものであれば、判定手段5に対象のID(芯線IDm)を渡す(報告)とともに、位置からの対象識別手段4に信号線6を介して芯線のIDが読み取られたことのトリガー信号を送る。
【0030】
タグIDによる対象識別部は、概ね、以上のように構成されている。次に、接続位置による対象識別部について説明する。接続位置による対象識別部は、タグIDによる対象識別部から、信号線6を介して芯線のIDが読み取られた旨のトリガー信号を受けたことを持って、以後の処理を開始する。なお、位置からの対象識別手段4は、タグからの対象識別手段3から機器9のIDを受けたときは、機器9のIDとして、受けたIDをセットし、認識すればよい。
【0031】
この接続位置による対象識別部においては、図1に示すようにタグのID入力手段2のタグ読みとり部分に、信号と時刻情報を発信する信号発信手段13を備える。また、端子5a、5b、5cの周りには、信号発信手段13の発信する信号を受信する信号受信手段11、12を備える。信号受信手段11、12は、受信した信号を、位置取得手段14に渡す。位置取得手段14は、受信した信号から、信号発信手段13の位置座標(x,y)を得る。この位置取得手段14の処理内容の一例については、特開2002−62978号公報に開示されている。
【0032】
以上のべた信号発信手段13、信号受信手段11、12、位置取得手段14により、接続位置による対象識別部の入力手段が構成されている。このようにして得られた位置座標(x,y)は、位置取得手段14から、位置からの対象識別手段4に送られる。位置からの対象識別手段4では、この位置座標(x,y)により、データベースDBを参照する。
【0033】
データベースDBは、対象物の位置についての情報を記憶しているデータベース(対象位置情報データベースDB)であり、設計情報データベースDB1と、端子位置情報データベースDB2から構成される。
【0034】
このうち、設計情報データベースDB1は、図3のように構成されており、端子台50で接続される端子のIDと芯線のIDが対応付けて記憶されている。例えば、現場機器9の端子5aには芯線7aが接続されるべきなので、図2のデータベースDB3の例に倣うと、端子5aのID(0100)と、芯線7aのID(0010)とが、ペアとして記憶されている。
【0035】
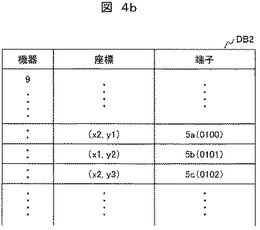
端子位置情報データベースDB2は、どの機器のどの位置にどの端子が位置しているかの端子位置情報である。図4aは、機器9について原点0を定めて、端子台50内の各端子5a、5b、5cの位置を、X,Y座標軸上に表示したものである。この場合に端子位置情報データベースDB2は、図4bのようなものが予め準備され記憶されている。この例では、ID(0100)の端子5aの座標は(x2、y1)、ID(0101)の端子5bの座標は(x1、y2)である。なお、図1において座標の原点0としては、現場機器9の任意箇所として、例えば機器のタグ80を取り付けた位置に定めておく。
【0036】
これに加え、端子位置5と芯線タグ8の位置関係情報も保持する。この位置関係を、例えば、(1)式の関数で保持しておく。
[数1]
端子位置座標=F(芯線タグ位置座標)−−−(1)
またより厳密な意味では、たとえば、右方向からケーブル芯線7が端子5に接続され、芯線タグ8の位置は、端子5のおよそxa(mm)右に位置し、かつy座標は重力方向にya(mm)多くなるのであれば、以下とする。
[数2]
端子位置座標(x(t),y(t))=F(芯線タグ位置座標(x(w),y(w))=(x(w)−xa,y(w)+ya)−−−(2)
なお、Xa,yaには幅があるため、端子位置座標(x(t),y(t))の最小点と最大点で保持するとよい。図4aの例では、芯線タグ8の位置は、端子5のおよそxa(mm)右に位置しており、Y軸方向での変更はない。図4bのデータベースDB2には、必要に応じて、xa(mm)右に位置していることの情報も記憶される。各データベースには上記のような形式で情報記憶がされている。
【0037】
位置からの対象識別手段4は、位置取得手段14から受けた位置座標(x,y)が、タグのID入力手段1が読み取った芯線タグ8の位置座標であることから、(2)式の関数により端子5の位置座標に変換する。図4aでは、読み取った芯線タグ8の位置座標から、xaを引いて、端子5の位置座標とする。そのうえで、機器9のIDから端子位置情報データベースDB2を参照して、該当する機器9の端子位置座標から、端子のIDを得る。さらに、得られた端子のIDから今度は設計情報データベースDB1を参照して、端子のIDとペアになる対象のID(芯線IDn)を得ることができる。芯線IDnの情報は、判定手段5に報告される。
【0038】
一連の流れを図4a,図4bで説明すると、タグ8aに入力手段1が当てられたとき、位置取得手段14は、タグ8aの位置(x1+xa,y1)を検知し、位置からの対象識別手段4は、xaを考慮して(x1,y1)を端子位置とする。そして、機器9についての図4bの座標をサーチして、ヒットする端子情報5aのID(0100)を得る。さらに、端子情報5aのID(0100)から、設計情報データベースDB1をサーチして、芯線ID(0010)を得る。芯線ID(0010)は、芯線7aのものであることから、位置からの対象識別手段4は、機器9について、端子5aには、芯線7aが接続されるべきであることを認知する。
【0039】
なお、(2)式の関数で保持する代わりに、あらかじめ芯線のID=G(機器のID,x、y)の関数を定めて表にして保持して用いると、処理を早くできるので良い。
【0040】
判定手段5は、2つの対象識別手段3,4から芯線IDについての報告を受け、次にこれを比較する。そして、芯線IDmと芯線IDnが一致していれば、設計情報データベースDB1に従ったケーブル接続がされているとして、「OK」表示および記録を行う。芯線IDmと芯線IDnが一致していなければ、「NG」表示および記録を行う。
【0041】
図5は、図1の接続支援装置の各部動作を模式的に示した図で、右側にタグによる対象識別、左側に位置による対象識別の流れを示す。
【0042】
まず、右側のタグによる対象識別では、データベースDB3の参照結果には、芯線のIDが読み取られたケースと、機器のIDが読み取られたケースとがある。前者の場合、対象識別手段3は、判定手段5に読み取った芯線のID(IDm)を報告するとともに、左側の位置による対象識別に対してトリガー信号を与える。なお、機器のIDが読み取られた後者のケースでは、対象識別手段4に報告するのみで、対象識別手段4は表示以外に格別の動作を起こさない。
【0043】
対象識別手段4は、トリガー信号を受けて、位置取得手段14による位置取得を実行し、以後位置補正のあとデータベースDB2,データベースDB1と順次参照して芯線のID(IDn)を判定手段5に報告する。判定手段5は、2つの異なる手法で判定された2つの芯線のID(IDnとIDm)を比較して、その一致結果を出力する。
【0044】
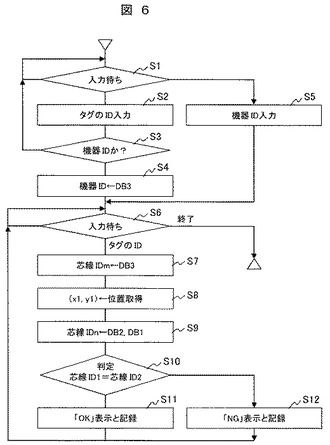
図6は、図1に示したタグのIDを用いた端子台端子とケーブル芯線の接続支援を行う装置の動作フローを示している。
【0045】
まず、手順S1では、タグのID入力手段1からの入力待ちをしている。手順S2では、タグのID入力があったときに手順S3に進み、ここでタグと対象関連付け情報データベースDB3を参照する。ID入力が機器ID(機器9に設定されたタブ80のID)であれば、手順S4により機器IDにタグと対象関連付け情報(タグのID)を設定する。機器IDでなければ、手順S1に戻り、手順S1の入力待ちの後、機器IDが入力されれば、手順S5の機器ID入力の処理後、手順S6に進む。ここまでの処理により、複数の現場機器のうちの特定の機器が対象物として設定された。従って、次の段階では、特定された機器についてのもう1つのタグである芯線についての入力を待つ。
【0046】
手順S6の入力待ちの後、タグのIDが入力されたとき、手順S7ではタグと対象関連付け情報(タグのID)データベースDB3を参照する。この結果、このタグが芯線のものであることを確認し、このときの芯線IDmを得る。
【0047】
次に手順S8では、芯線が確認されたことをトリガとして、位置取得手段14により補正された座標位置(x1、y1)を得る。
【0048】
手順S9では、この座標位置(x1、y1)をインデックスとして、端子位置情報データベースDB2を参照して端子の情報を得、さらに端子の情報をインデックスとして設計情報データベースDB1を参照することにより、芯線IDnを得る。
【0049】
手順S10では、判定(芯線IDm=芯線IDn)を行う。判定結果により、手順S11では「OK」表示と記録し、あるいは手順S12において「NG」表示と記録を行う。
【0050】
その後入力待ちS6に処理は移り、タグのIDが入力されれば同様に繰り返す。終了メニューが選ばれれば、処理を終了する。
【0051】
以上述べた実施例1においては、超音波を用いた位置取得手段14により座標軸上の位置を決定していた。
【実施例2】
【0052】
本実施例では、超音波を用いた位置取得手段の代わりに、プレート状入力手段を用いた位置取得手段による端子台端子とケーブル芯線の接続支援を行う装置の例を説明する。
【0053】
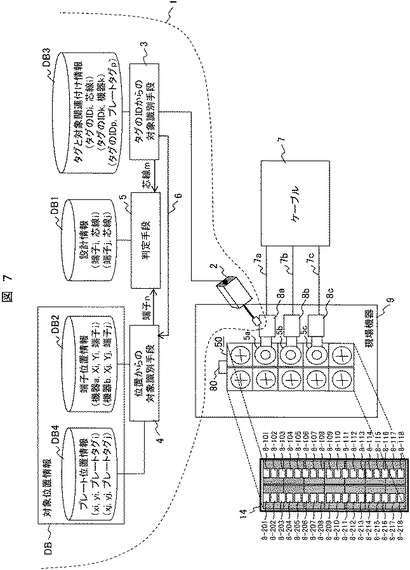
図7は、実施例2における端子台端子とケーブル芯線の接続支援を行う装置を示す構成図の例である。
【0054】
図1のうち、既に説明した図1に示された同一の符号を付された構成と、同一の機能を有する部分については、説明を省略する。
【0055】
現場機器9の端子は、端子台50に2列に並んだ端子である。端子5a、5b、5cにケーブル7の芯線7a、7b、7cが接続されている。芯線7a、7b、7cには各々タグ8a、8b、8cがはめられている。また、現場機器9には、機器を区別するためのタブ80が設けられている。これらのタグは、RFIDまたはバーコードまたはそのほかのICタグであり、タグのID入力手段1で、タグのIDを読み取ることができる。
【0056】
位置取得手段14は、端子台50に重ねるプレート状をしている。この位置取得手段14を2列の端子台50に重ねると、例えば右側列上から下に向けてタグ8−101〜8−117、左側列上から下に向けてタグ8−201〜8−217が見えるようにプレートにタグを配置しておく。
【0057】
タグのID入力手段1は、タグのIDを読み取ると、タグのIDからの対象識別手段3に、タグのIDを渡す。タグのIDからの対象識別手段3は、タグのIDを受けると、タグと対象関連付け情報データベースDB3を参照してタグと関連付けられた対象のIDと種類を得る。
【0058】
ここで、タグと対象関連付け情報データベースDB3の一例を図8に示す。図8は、基本的には実施例1のときのタグと対象関連付け情報データベースDB3と同じ構造をしているが、さらにプレートタグの関連情報を備えている。例えば、読み込まれたIDが3101のとき、プレート14のタグ8−101を意味し、IDが3102のとき、プレート14のタグ8−102を意味するといった具合である。
【0059】
このように、図7の実施例2の場合には、タグは機器9、芯線7、プレート14に使用されているので、IDと、機器9、芯線7、プレート14の関係が対応付けてデータベースDB3に記憶されている。
【0060】
対象識別手段3は、このデータベースDB3の照合結果として、種類が機器9またはプレート14であれば、信号線6を介して位置からの対象識別手段4に渡す。また種類が芯線7であれば、判定手段5に対象のID(芯線IDm)を渡し、位置からの対象識別手段4に芯線のIDが読み取られたトリガー信号を送る。
【0061】
位置からの対象識別手段4は、機器のIDを受けたならば機器のIDとして受けたIDをセットして記憶し、以後格別の動作を行わない。これに対し、芯線7のIDが読み取られたトリガー信号を受けたならば、データベースを参照して最終的に対象のID(端子IDn)を得て、判定手段5に渡す。
【0062】
判定手段5は、設計情報データベースDB1を参照して芯線IDmと端子IDnが一致していれば、設計情報データベースDB1に従ったケーブル接続がされているとして、「OK」表示および記録を行う。芯線IDmと芯線IDnが一致していなければ、「NG」表示および記録を行う。
【0063】
以下、位置からの対象識別手段4が、データベースを参照して最終的に対象のID(端子IDn)を得るまでの手順について説明するが、その前提としてデータベースDB内の2つのデータベースについて説明しておく。ここに備えるデータベースは、プレート位置情報データベースDB4と、実施例1でも説明した端子位置情報データベースDB2である。
【0064】
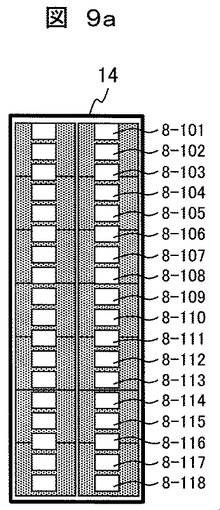
このうち、プレート位置情報データベースDB4は、図9の考えに従って構成されている。まず、図9aには、図7の端子台50にプレート(ユニバーサルプレート)14を被せた状態を示している。この図は、図7のプレート14をそのまま拡大表示している。右側白抜きの部分には、8−101から8−117までのタグが備えられている。
【0065】
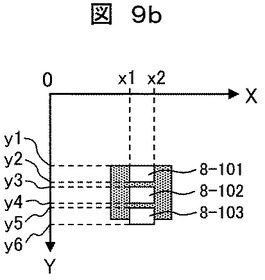
図9bは、例えば図7の端子台50に設けた機器用のタグ80の添付位置を原点Oとしたときの、プレート14上の各タグの位置をX−Y座標軸上で表現したものである。
この場合に、タグは面的広がりを有するので、タグ8−101は、左上位置が(x1、y1)、右下位置が(x2、y2)となる矩形位置(x1、y1)(x2、y2)に位置することになる。同様に、タグ8−102は、左上位置が(x1、y3)、右下位置が(x2、y4)となる矩形位置(x1、y3)(x2、y4)に位置し、タグ8−103は、左上位置が(x1、y5)、右下位置が(x2、y6)となる矩形位置(x1、y5)(x2、y6)に位置している。
【0066】
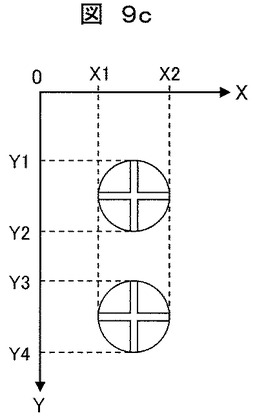
他方で、プレート14を取り付けていない状態での端子5aの位置を、同じX−Y座標軸上で表現すると図9cのようになる。端子5aもまた面的広がりを有するので、左端位置がX1,上端位置がY1、右端位置がX2,下端位置がY2となる円形範囲に位置することになる。従って、当該端子5にプレート14をのせたとき、この端子5aの円形範囲の上部に位置することになるプレート内の座標は、(X1,Y1)(X2,Y2)の矩形位置に位置することになる。
【0067】
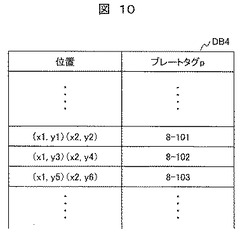
図10に示すプレート位置情報データベースDB4には、以上の関係からタグ8−101については、(x1、y1)(x2、y2)の矩形位置に位置する情報が保持されている。同様にタグ8−102については、(x1、y3)(x2、y4)の矩形位置に位置する情報が保持されている。
【0068】
なお、プレート位置情報データベースDB4には、全てのプレートタグについての位置情報を備えるのがよいが、プレートタグ間の距離や、大きさは同じであり、配置には規則性があることから、最小点の1点のみ保持し、プレートタグのID=プレートタグiがプレート内の座標(xi,yi)に位置する情報とサイズは共通で保持されていてもよい。
【0069】
図11の端子位置情報データベースDB2もまた、以上の関係から構成される。つまり、機器のIDとともに、端子5aについては、(X1,Y1)(X2,Y2)の矩形位置に位置する情報として保持されている。また同様に、端子5bについては、(X1,Y3)(X2,Y4)の矩形位置に位置する情報として保持されている。
【0070】
なお、この場合にも端子位置情報データベースDB2には、全ての端子についての位置情報を備えるのがよいが、端子間の距離や、大きさは同じであり、配置には規則性があることから、最小点の1点のみ保持し、サイズ(X2−X1,Y2−Y1)は共通で保持するものとすることができる。
【0071】
図12は、図7に示したタグのIDを用いた端子台端子とケーブル芯線の接続支援を行う装置の動作フローを示している。
【0072】
ここでは、手順S1で入力待ちの後、手順S2でタグのID入力がされると、手順S3でタグと対象関連付け情報データベースDB3を参照する。この結果、機器IDであれば、手順S4により機器IDとして、タグと対象関連付け情報(タグのID)を設定する。機器IDでなければ、手順S1に戻る。手順S1の入力待ちの後、機器IDが入力されれば、手順S5の機器ID入力の処理後、手順S6に進む。ここまでの処理により、複数の現場機器のうちの特定の機器が対象物として設定された。従って、次の段階では、特定された機器についてのほかのタグであるプレートと芯線についての入力を待つ。
【0073】
手順S6の入力待ちの後、タグのIDが入力されると、手順S7に進む。手順S7では、対象関連付け情報(タグのID)データベースDB3を検索して、これがプレート14に配置されたタグのIDであるプレートタグpであることを確認、設定する。プレートタグpは、タグのIDをそのまま用いても良いし、位置取得手段14であるプレート状の位置番号を用いても良い。
【0074】
手順S8では、位置からの対象識別手段4により、機器ID,プレートタグpにより対象位置情報データベースDBを参照して、最終的に端子IDの情報を得る。手順S8における詳細な処理過程を、図13により後述する。
【0075】
手順S9では、手順S8で得た端子IDが、不可であった場合、手順S6に戻り、次のタグIDの入力を待って、プレートタグについての処理を繰り返し実行する。また、プレートタグについての処理を完了した場合には、次に手順S10に移り、今度は最後に残されたケーブル芯線のタグについての処理を行う。
【0076】
ケーブル芯線のタグについての処理では、まずタグのIDの入力を受け、手順S11でタグと対象関連付け情報データベースDB3を参照する。この結果、タグのIDからの対象識別手段3により、タグのIDから芯線IDを得る。なお、図12に示してはいないが、芯線ID以外のものであれば、エラー表示にて、手順S6に戻る。
【0077】
次に、手順S12では設計情報データベースDB1を参照し、(端子ID、芯線ID)のペアが正しいかどうかを判定し、判定結果により、手順S11では「OK」表示と記録を行ない、あるいは手順S12において「NG」表示と記録を行う。
【0078】
なお、入力待ち処理手順S6に処理は移り、タグのIDが入力されれば同様に繰り返す。終了メニューが選ばれれば、処理を終了する。
【0079】
詳細説明を後回しにしたが、手順S8では、位置からの対象識別手段4により、機器ID,プレートタグpにより対象位置情報を参照して、端子IDに設定するが、その詳細を、図13にて説明する。
【0080】
この段階の説明では、機器IDが特定されている。またこの機器についてのプレートタグであることが、処理S7におけるタグと対象関連付け情報データベースDB3の参照により判明している。
【0081】
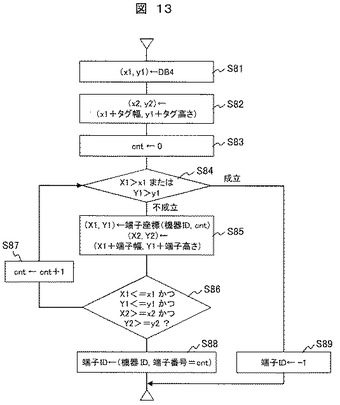
係る前提において、図13では、最初に処理S81,S82において、プレートタグpからプレート位置情報データベースDB4を参照してタグの位置情報(x1、y1)(x2、y2)を得る。この位置情報を得るには幾つかの方法がある。
【0082】
第1の方法は、図10のデータベースにおいて、プレートタグとして例えば8−101であるときには、プレートタグの欄の8−101に対応する位置の欄を検索してX−Y座標軸上の位置情報を得る。このとき、図10のデータベースDB4として、面的広がりを有するタグの大きさを意味する2点の情報を記憶しておくことで、タグの位置情報(x1、y1)(x2、y2)を得る。
【0083】
第2の方法は、データベースDB4としては、一点の情報(x1、y1)のみを記憶したデータベースとし、処理S81においてデータベース検索により(x1、y1)を得、更に手順S82において、サイズ情報を利用して、タグ位置の最大点(x2、y2)も得るものである。図13には後者の方法を示すが、いずれともできる。
【0084】
処理S83では、以下の処理を繰り返し実行するための初期設定として繰り返しインデックスCntを0に設定する。
【0085】
次に、手順S84−S86により、このプレートタグが、どの端子の位置に重なっているかを探索する。端子は、図9に示したように原点に近い列から、近い行からの順に端子位置情報に保持しておき、Cntを0に設定し、端子を順に座標位置が原点に近いほうから探す。
【0086】
手順S84では、図9cの端子側位置X1、Y1と、プレートタグ側位置を比較する。具体的には、X1>x1、またはY1>y1の関係が成立していることを確認する。
【0087】
この条件が成立するときには、このプレートタグ位置に重なる部分に、端子が存在しないので、端子位置が探せなかったとして、手順S89において、端子IDを「−1」にして処理を終わる。
【0088】
この条件が成立しないときには、このプレートタグ位置に重なる部分に、端子が存在すると考えられるので、次の手順S85では端子位置座標を特定する。この特定に当り、幾つかの方法がある。第1の方法は、端子位置を(X1,Y1)(X2,Y2)の矩形位置に位置する情報として保持しておきプレートタグ位置と比較する方法である。
【0089】
第2の方法は、端子位置として(X1,Y1)のみを記録しておいて、端子の幅や端子の高さから(X2,Y2)を求めて、最終的に矩形位置を決定する手法である。手順S85には、第2の方法に取る端子位置特定手法を記載している。
【0090】
次に、手順S86では、ここに示すアンド条件が成立することを確認する。この処理は例えば、端子位置の境界に位置するプレートタグが読み込まれた場合、手順S86の条件を満たさないため、このように終了し、図13の手順S84に戻る。このようにすれば、端子の境界のタグは読み飛ばされ、端子位置にちょうど重なるタグのみ有効となるため、作業が正確に行われる効果がある。
【0091】
最後に、手順S88において端子IDを特定する。この状態では、機器IDがすでに特定されている。かつ次にプレートタグの読み取りを座標原点から近い位置から順に実施した結果として、繰り返しインデックスCntがプレートタグ位置に相当するものになっている。従って、このときの繰り返しインデックスCntを参考に端子IDを特定することができる。
【0092】
なお、プレートタグ位置からの端子位置の特定に当っては、上記手法以外にも種々のやり方が考えられる。ここでは、その一例を示したに過ぎない。また、一般には、プレートタグの大きさと、端子の大きさは異なり、複数のプレートタグに重なることが考えられるが、このことも考慮の上で端子を特定することは容易に行えることである。
【0093】
図14に、実施例2で用いる位置取得手段14としてのユニバーサルプレートの例を示す。図14dは、図9aで示したものと同様であり、プレート表面に重ねる端子台の端子エリアを示しているが、図14cは、プレートを透明にし、端子のピッチが異なる他の端子台に重ねた様子を示している。プレートを透明にし、端子サイズより小さいタグを用いれば、端子のピッチが異なる端子台に共通で用いることができる。
【0094】
また、図14a、図14bのように、端子台の固有のピッチ、長さでプレートを用意し、各端子に一つずつタグを配置しても良い。また、プレートを、布やビニールのようにフレキシブルな素材で作ることで、長さが異なる端子台で、上下左右に他の端子台やその他があって余った長さ分を納める場所が無い場合でも取り付け可能となる。図15に示すように、巻尺形状にして余る長さを巻き取ってケースに収める形状とすれば、扱いやすい。
【実施例3】
【0095】
本実施例では、位置取得手段が取り付けられない場合での端子台端子とケーブル芯線の接続支援を行う装置の例を説明する。
【0096】
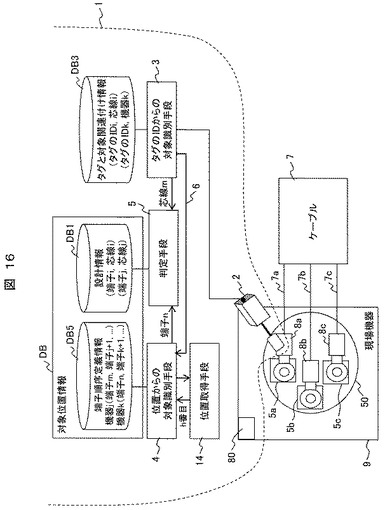
図16は、実施例3における端子台端子とケーブル芯線の接続支援を行う装置を示す構成図の例である。
【0097】
図16のうち、既に説明した図1、図7に示された同一の符号を付された構成と、同一の機能を有する部分については、説明を省略する。
【0098】
現場機器9には、端子5a、5b、5cがあり、ケーブル7の芯線7a、7b、7cが接続されている。芯線7a、7b、7cには各々タグ8a、8b、8cがはめられている。タグは、RFIDまたはバーコードまたはそのほかのICタグであり、タグのID入力手段1で、タグのIDを読み取ることができる。
【0099】
タグのID入力手段1は、タグのIDまたは番号を読み取ると、タグのIDからの対象識別手段3に、タグのIDまたは番号を渡す。タグのIDからの対象識別手段3はタグのIDまたは番号を受けると、タグと対象関連付け情報データベースDB3を参照してタグと関連付けられた対象のIDと種類を得て、種類が機器であれば、位置からの対象識別手段4に渡し、種類が芯線であれば、判定手段5に対象のID(芯線IDm)を渡し、かつ位置からの対象識別手段4に芯線のIDが読み取られたトリガー信号を送る。
【0100】
実施例3では、データベースDBとして新たに端子順序定義情報データベースDB5を備える。ここには、機器ごとの端子の順序を定義する情報が保持してある。機器ごとに、いくつ端子が備えられているかと、各端子の順序を定義するために、機器IDと端子IDの順序列を記憶装置上に保持しておく。
【0101】
そのうえで、この実施例3の場合には検査員のタグのID入力手段1の操作方法(読み取り順序)を、所定の約束に従い実行させる。例えば、機器確認後のID入力手段1を近づけるときのタグ順序を、必ず機器の上部に位置するタグから下部のタグに向かって行わせるという約束の下に操作させる。
【0102】
このときに、位置からの対象識別手段4は、この実施例では、何番目の端子かという情報を端子IDに変換する働きをする。具体的には、位置からの対象識別手段4は、タグのIDからの対象識別手段3から、最初に機器のIDを受付け、次いで芯線のIDが読み取られたトリガー信号を受けつける。かつ、芯線のIDの取り込みは、この機器に固有の特定回数、継続して行われるはずである。
【0103】
このことから、まず機器のIDを受付けたならば、受けたIDを機器のIDとしてセットし、端子カウンターを初期値1にセットする。次いで、芯線のIDが読み取られたトリガー信号を受けたならば、端子順序定義情報データベースDB5を参照して、機器のIDと、端子IDの順序列の中から、端子カウンター値の順番である対象のID(端子IDn)を得て、判定手段5に渡す。
【0104】
判定手段5は、タグのIDからの対象識別手段3から芯線IDmを、位置からの対象識別手段4から端子IDnを受け付ける。そして、端子IDnをキーとして設計情報データベースDB1を参照し、芯線IDmのペアが端子IDnであるかどうかを判定する。もちろん、端子IDnのペアが芯線IDmであるかどうかを判定しても良い。
【0105】
判定手段5は、芯線IDmと芯線IDnが一致していれば、設計情報データベースDB1に従ったケーブル接続がされているとして、「OK」表示および記録を行う。芯線IDmと芯線IDnが一致していなければ、「NG」表示および記録を行う。
【0106】
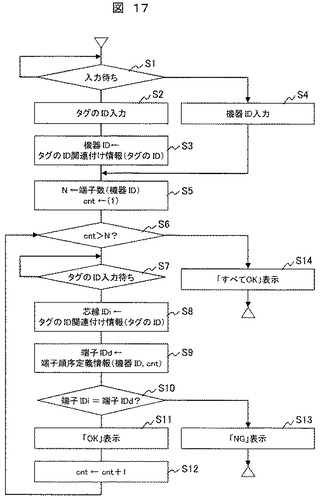
図17は、図16に示したタグのIDを用いた端子台端子とケーブル芯線の接続支援を行う装置の動作フローを示している。
【0107】
手順S1で入力待ちの後、手順S2でタグのID入力がされれば、手順S3でタグと対象関連付け情報データベースDB3を参照する。機器のIDであれば、機器のIDにその値を設定する。機器のIDでなければ、手順S1に戻る(図17のフロー図にその処理は省いてある)。手順S1の入力待ちの後、機器IDが入力されれば、手順S4で機器のIDにその値を設定する。手順S5では、端子順序定義情報データベースDB5を参照して、セットされた機器IDについて、端子数がいくつあるかを調べNにセットし、端子カウンターcntを初期値1にセットする。手順S6で端子カウンターcntが端子数Nを超えれば、すべての端子について判定が終わったとして手順14で「すべてOK」の表示および記録をして処理を終了する。これにより、機器IDに対する処理が終了し、つぎに芯線タグに対する処理を行う。
【0108】
手順S7で入力待ちの後、タグのIDが入力されれば、手順S8により、芯線IDmにタグと対象関連付け情報(タグのID)を設定する。次に、手順S9により、端子順序定義情報データベースDB3を参照して、機器のIDと、端子IDの順序列の中から端子カウンターcntの順番である対象のIDを得て端子IDnを設定する。手順S10で、設計情報データベースDB1を参照し、芯線IDmのペアが端子IDnであるかどうかを判定する。もちろん、端子IDnのペアが芯線IDmであるかどうかを判定しても良い。判定結果が正しければ、手順11「OK」表示と記録を行い、手順12で端子カウンターcntを更新する。あるいは、判定結果が正しくなければ、手順13「NG」表示と記録を行う。
【0109】
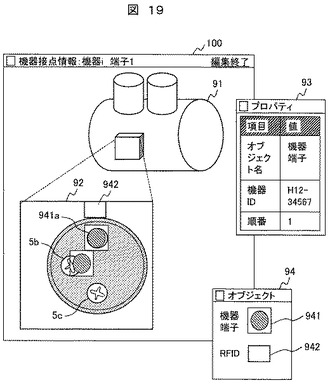
実施例3では、端子順序定義情報データベースDB5に、機器ごとの端子の順序を定義する情報が保持するが、端子順序定義情報を作成する必要があり、その操作例について図18から図21を用いて、述べる。
【0110】
図18は、PC画面に表示する表示枠100に、機器91と、その端子台92を拡大表示した図である。この機器91には、端子台92があり、その端子5は3つ(5a,5b,5c)ある様子を示している。これらの情報は、通常は機器仕様として機器メーカーより提供される図面である。端子台92、端子5が画像情報である場合は、表示はされているが、端子台、端子の絵であることをPCは認識できない。このため、表示枠100の右上の「編集」ボタンを押すと、端子順序定義情報の定義モードになる。
【0111】
図19は、端子順序定義情報の定義モードでの画面表示例を示しており、定義モードでは新たにプロパティ定義画面93、オブジェクトメニュー画面94が追加表示される。
【0112】
このうち、オブジェクトメニュー画面94のオブジェクトの種類には、機器端子とRFIDがある。ユーザーは、機器端子メニュー941を指定して、このオブジェクトを端子5aに重ねる操作をすると、端子オブジェクト941aがその位置に定義される。RFIDメニュー942を指定して、このオブジェクトを、RFIDを取り付けた位置に置く操作をすると、RFIDオブジェクト942がその位置に定義される。各々のオブジェクトのプロパティは、プロパティ定義画面93で定義する。端子の機器内順序は、初期値は、端子オブジェクトが定義された順番値が入るが、その後、このモードにおいて変更することができる。
【0113】
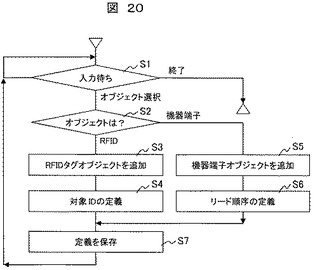
図20は、図19の操作を受け付ける手順をフローにしたものである。手順S1でユーザーからの入力を待つ。オブジェクトが選択されれば、手順S2でRFIDタグオブジェクトであれば、手順S3でRFIDタグオブジェクトを追加、手順S4で対象のIDの定義を受け付ける。すなわち、対象の種類として機器・端子・芯線の値の入力を受け、設計上のIDを受ける。手順S2で機器端子オブジェクトであれば、機器端子オブジェクトを追加、手順S4で機器IDの定義を受け付ける。手順S6でリード順序の定義を受け付ける。手順S7では、定義内容を記憶手段に保存する。
【0114】
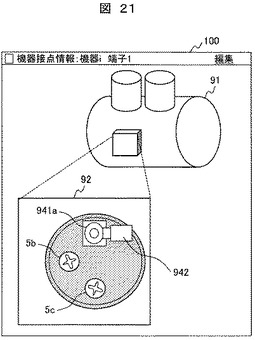
図21は、この実施例で、接続チェックの際に、芯線RFIDをリードした際の画面表示例を示したものである。実施例1、2でも同様に定義することで、RFIDをリードした、または、位置からの対象識別手段が検視した端子を、同様に強調表示すると、作業者に、作業状況を知らしめることができて、効率向上につながる。
【符号の説明】
【0115】
1:ケーブル接続支援装置
2:タグのID入力手段
3:タグのIDからの対象識別手段
4:位置からの対象識別手段
5:判定手段
5a、5b、5c:端子
6:信号線
7a、7b、7c:ケーブル7芯線
8a、8b、8c:タグ
9:現場機器
11、12:信号受信手段
13:信号発信手段
14:位置取得手段
50:端子台
80:機器のIDを示すタグ
DB:対象位置情報データベース
DB1:設計情報データベース
DB2:端子位置情報データベース
DB3:タグと対象関連付け情報データベース13:信号発信手段
【技術分野】
【0001】
本発明は、対象物確認装置及び方法に係り、特にプラントなどの建設・保守における結線箇所の確認作業を支援するための対象物確認装置及び方法に関する。
【背景技術】
【0002】
プラントなどの建設・保守においては、現場機器とケーブルを電気的に結線し、あるいは結線箇所の確認作業を行う。係る結線に誤接続があってはならないことから、正しい接続相手を識別可能とする為の工夫を施し、かつその上で、多大の人手と時間を要して接続箇所確認作業を行っている。
【0003】
この点に関して、特許文献1における作業支援は、以下のように行なわれる。接続箇所にRFIDを取り付けておき、RFIDリーダを用いてその情報を読み取る。他方で、回路情報・RFID情報・作業手順情報などを記憶したデータベースを準備しておく。作業者は、端末にRFIDリーダからの情報を取り込み、データベースにアクセスして必要な情報を得ることで接続箇所確認などの現場作業を円滑に行うことができる。
【0004】
また、特許文献2における作業支援は、以下のように行なわれる。現場機器や計器などの信号ケーブルを配線・結線する際に、結線作業結果より、入出力信号リストを自動的に作成し、そのリストにこだわらずに結線作業を行なうことで、作業の効率化を高める入出力制御装置を得る。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−151383号公報
【特許文献2】特開2006−163490号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献の手法では、接続対象現場機器、例えば端子台端子にRFIDなどのタグを予め取り付けている。しかしながら、タグのIDを用いた端子台端子とケーブル芯線の接続支援において、端子台の端子に予めタグを取り付けるのは、コストと手間がかかる。また、端子台端子によっては、RFIDなどのタグを取り付けることが(狭くて)できない、あるいは困難というものもある。
【0007】
以上のことから、低コストで簡単に端子台の端子にタグを取り付けることあるいは、端子台の端子にタグを取り付けることなく目的の作業支援を行うことが課題となる。
【課題を解決するための手段】
【0008】
本発明は、タグを用いて現場機器の対象物の接続を確認する為の対象物確認装置であって、対象物に取り付けられたタグから、そのIDを入力するID入力手段、ID入力手段の出力から、対象物に関する第1の情報を得る第1の対象識別手段、タグの位置に相当する情報を取得する位置取得手段、位置取得手段の出力から、対象物に関する第2の情報を得る第2の対象識別手段、第1の情報と第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認する判定手段とからなる。
【0009】
また、第1の対象識別手段は、タグが設置された第1の対象物の情報をタグIDに関連つけて記憶する第1のデータベースを含み、第2の対象識別手段は、第1の対象物に接続された第2の対象物の情報を位置に相当する情報に関連つけて記憶する第2のデータベースを含み、さらに第1の対象物と第2の対象物の正しい組み合わせを記憶する第3のデータベースを備える。
【0010】
また、第1の対象物と第2の対象物は、現場機器の端子とケーブルとされる。
【0011】
また、位置取得手段は、ID入力手段に取り付けられた信号発振手段と、発振手段の信号を受信する信号受信手段と、信号受信手段の出力からタグの位置を得る位置決定手段からなる。
【0012】
また、位置取得手段は、対象物を覆い、かつ表面にその位置が明らかな複数のタグを備えたユニバーサルプレートと、ユニバーサルプレート上の位置から対象物上の位置を定める位置決定手段からなる。
【0013】
また、位置取得手段は、対象物上のタグ位置情報を備える記憶手段を含み、ID入力手段によるタグの読み取りは定まった順序に従い実行される。
【0014】
本発明は、タグを用いて現場機器の第1の対象物と第2の対象物の接続を確認する為の対象物確認装置であって、タグを備えた第1の対象物の情報を、タグIDに関連つけて記憶する第1のデータベース、第1の対象物に接続された第2の対象物の情報を前記タグの位置に相当する情報に関連つけて記憶する第2のデータベース、第1の対象物と第2の対象物の正しい組み合わせを記憶する第3のデータベースを備える。
【0015】
本発明は、タグを用いて現場機器の対象物の接続を確認する為の対象物確認方法であって、対象物に取り付けられたタグから、そのIDを入力して対象物に関する第1の情報を得、タグの位置に相当する情報を取得して対象物に関する第2の情報を得、第1の情報と第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認する。
【0016】
本発明は、タグを用いて現場機器の第1の対象物と第2の対象物の接続を確認する為の対象物確認方法であって、第1の対象物に取り付けられたタグから、そのIDを入力して第1の対象物に関する第1の情報を得、タグの位置に相当する情報を取得して第2の対象物に関する第2の情報を得、第1の対象物についての第1の情報と第2の対象物についての第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認する。
【発明の効果】
【0017】
端子台端子とケーブル芯線の接続支援において、コストや手間を低減しかつ信頼性を確保できる。
【図面の簡単な説明】
【0018】
【図1】実施例1の、ケーブル接続支援装置の構成図の例を示す図。
【図2】実施例1の、タグと対象関連付け情報データベースDB3の例を示す図。
【図3】実施例1の、設計情報データベースDB1の例を示す図。
【図4a】実施例1の、機器上の位置をX,Y座標軸上に表示した図。
【図4b】実施例1の、端子位置情報データベースDB2の例を示す図。
【図5】図1の接続支援装置の各部動作を模式的に示した図。
【図6】図1の接続支援装置の動作フローを示す図。
【図7】実施例2の、ケーブル接続支援装置の構成図の例を示す図。
【図8】実施例2の、タグと対象関連付け情報データベースDB3の例を示す図。
【図9a】実施例2の、タグを備えたプレートを示す図。
【図9b】実施例2の、プレートの位置をX,Y座標軸上に表示した図。
【図9c】実施例2の、端子の位置をX,Y座標軸上に表示した図。
【図10】実施例2の、プレート位置情報データベースDB4の例を示す図。
【図11】実施例2の、端子位置情報データベースDB2の例を示す図。
【図12】図7の接続支援装置の動作フローを示す図。
【図13】図13の動作フローの一部詳細フローを示す図。
【図14a】実施例2で用いるユニバーサルプレートの一例を示す図。
【図14b】実施例2で用いるユニバーサルプレートの一例を示す図。
【図14c】実施例2で用いるユニバーサルプレートの一例を示す図。
【図14d】実施例2で用いるユニバーサルプレートの一例を示す図。
【図15】実施例2で用いるユニバーサルプレートの一例を示す図。
【図16】実施例3の、ケーブル接続支援装置の構成図の例を示す図。
【図17】実施例3の、接続支援を行う装置の動作フローを示す図。
【図18】PC画面表示例を示す図。
【図19】端子順序定義情報の定義モードでの画面表示例を示す図。
【図20】図19の操作を受け付ける手順を示すフロー図。
【図21】実施例3の接続チェックで芯線RFIDをリードした画面を示す図。
【発明を実施するための形態】
【0019】
以下、本発明の実施例について、図面を用いて説明する。
【実施例1】
【0020】
本実施例では、端子台端子とケーブル芯線の接続支援を、タグのIDを用いて行う装置の例を説明する。プラントやビルのケーブル接続作業において、設計通りにケーブルが接続されたかを確認するのに用いる。この場合に、接続確認の対象となる対象物が端子台端子とケーブル芯線であり、第1の対象物(例えばケーブル芯線)と第2の対象物(例えば端子台端子)が正しい相手と接続されていることを確認する。
【0021】
図1は、本実施例のケーブル接続支援装置の構成図の例である。この図において、9が、端子台50を備える現場機器である。現場には現場機器が複数あるので、特定の現場機器(以下単に機器という)であることを明確にするために、機器9には当該機器のIDを示すタグ80が設けられている。また機器の端子台50には、端子5a、5b、5cが備えられており、各端子5a、5b、5cにはそれぞれケーブル7の芯線7a、7b、7cが接続されている。芯線7a、7b、7cには、各々タグ8a、8b、8cがはめられている。
【0022】
本実施例では、現場機器9の端子台50の各端子5a、5b、5cが、ケーブル7の芯線7a、7b、7cに接続された上記構成において、設計通りにケーブルが接続されていることを、ケーブル接続支援装置1を用いて確認する。
【0023】
ケーブル接続支援装置1は、接続確認のための対象識別を、タグIDからの情報と、接続位置情報の2つの観点から行う。それぞれの対象識別部は、いずれも入力手段と、対象識別手段と、データベースから構成されている。以下、タグIDによる対象識別部、接続位置による対象識別部について順次説明する。
【0024】
まず、タグIDによる対象識別部について説明する。この対象識別部においては、芯線7a、7b、7cに、各々タグ8a、8b、8cが嵌められていることを前提とする。また、現場機器9には機器ごとに固有の識別情報が記憶されたタグ80が備えられている。ここで、タグは、RFIDまたはバーコードまたはそのほかのICタグであり、タグのID入力手段2により、タグのIDまたは番号を読み取ることができる。以降、タグのIDまたは番号をタグのIDと称する。なお、固有の番号のほうが信頼性は向上するが、固有の番号でなくても一定の効果を得ることができる。
【0025】
現場での作業は、最初に識別対象現場機器9のタグ80を確認し、次に芯線7a、7b、7cに設置されたタグ8a、8b、8cを確認する。
【0026】
機器のタグ80や、芯線7a、7b、7cに設置されたタグ8a、8b、8cに記憶されたIDまたは番号は、タグのID入力手段2を、検査員がタグ近辺にかざすことにより、信号として外部に取り出される。ID入力手段2は、タグのIDまたは番号を読み取ると、タグのIDからの対象識別手段3に、タグのIDまたは番号を渡す。タグのIDからの対象識別手段3は、タグのIDまたは番号を受けると、タグと対象関連付け情報データベースDB3を参照する。
【0027】
タグと対象関連付け情報データベースDB3は、例えば図2のように構成されており、機器9、並びに芯線のIDが記憶されている。例えば、この現場機器9のタグ80に付与された機器のIDが9999であり、この機器についての検知されたコードIDmが0010であるとき、これは対象物が芯線7aであり、IDmが0011であるとき、これは対象物が芯線7bである。タグのIDからの対象識別手段3は、タグと対象関連付け情報データベースDB3から、機器9並びに芯線7の種類と、対象物を示す情報を得る。
【0028】
タグからの対象識別手段3は、データベースDB3から入手した機器9並びに芯線7の情報を確認し、この種類が現場機器9であれば、読み取ったIDを、信号線6を介して位置からの対象識別手段4に渡す。識別の最初にタブ80を読み取り、機器が確認できたときには、以後この機器9における芯線7の識別が実行されることを認識する。
【0029】
また、種類が芯線7のものであれば、判定手段5に対象のID(芯線IDm)を渡す(報告)とともに、位置からの対象識別手段4に信号線6を介して芯線のIDが読み取られたことのトリガー信号を送る。
【0030】
タグIDによる対象識別部は、概ね、以上のように構成されている。次に、接続位置による対象識別部について説明する。接続位置による対象識別部は、タグIDによる対象識別部から、信号線6を介して芯線のIDが読み取られた旨のトリガー信号を受けたことを持って、以後の処理を開始する。なお、位置からの対象識別手段4は、タグからの対象識別手段3から機器9のIDを受けたときは、機器9のIDとして、受けたIDをセットし、認識すればよい。
【0031】
この接続位置による対象識別部においては、図1に示すようにタグのID入力手段2のタグ読みとり部分に、信号と時刻情報を発信する信号発信手段13を備える。また、端子5a、5b、5cの周りには、信号発信手段13の発信する信号を受信する信号受信手段11、12を備える。信号受信手段11、12は、受信した信号を、位置取得手段14に渡す。位置取得手段14は、受信した信号から、信号発信手段13の位置座標(x,y)を得る。この位置取得手段14の処理内容の一例については、特開2002−62978号公報に開示されている。
【0032】
以上のべた信号発信手段13、信号受信手段11、12、位置取得手段14により、接続位置による対象識別部の入力手段が構成されている。このようにして得られた位置座標(x,y)は、位置取得手段14から、位置からの対象識別手段4に送られる。位置からの対象識別手段4では、この位置座標(x,y)により、データベースDBを参照する。
【0033】
データベースDBは、対象物の位置についての情報を記憶しているデータベース(対象位置情報データベースDB)であり、設計情報データベースDB1と、端子位置情報データベースDB2から構成される。
【0034】
このうち、設計情報データベースDB1は、図3のように構成されており、端子台50で接続される端子のIDと芯線のIDが対応付けて記憶されている。例えば、現場機器9の端子5aには芯線7aが接続されるべきなので、図2のデータベースDB3の例に倣うと、端子5aのID(0100)と、芯線7aのID(0010)とが、ペアとして記憶されている。
【0035】
端子位置情報データベースDB2は、どの機器のどの位置にどの端子が位置しているかの端子位置情報である。図4aは、機器9について原点0を定めて、端子台50内の各端子5a、5b、5cの位置を、X,Y座標軸上に表示したものである。この場合に端子位置情報データベースDB2は、図4bのようなものが予め準備され記憶されている。この例では、ID(0100)の端子5aの座標は(x2、y1)、ID(0101)の端子5bの座標は(x1、y2)である。なお、図1において座標の原点0としては、現場機器9の任意箇所として、例えば機器のタグ80を取り付けた位置に定めておく。
【0036】
これに加え、端子位置5と芯線タグ8の位置関係情報も保持する。この位置関係を、例えば、(1)式の関数で保持しておく。
[数1]
端子位置座標=F(芯線タグ位置座標)−−−(1)
またより厳密な意味では、たとえば、右方向からケーブル芯線7が端子5に接続され、芯線タグ8の位置は、端子5のおよそxa(mm)右に位置し、かつy座標は重力方向にya(mm)多くなるのであれば、以下とする。
[数2]
端子位置座標(x(t),y(t))=F(芯線タグ位置座標(x(w),y(w))=(x(w)−xa,y(w)+ya)−−−(2)
なお、Xa,yaには幅があるため、端子位置座標(x(t),y(t))の最小点と最大点で保持するとよい。図4aの例では、芯線タグ8の位置は、端子5のおよそxa(mm)右に位置しており、Y軸方向での変更はない。図4bのデータベースDB2には、必要に応じて、xa(mm)右に位置していることの情報も記憶される。各データベースには上記のような形式で情報記憶がされている。
【0037】
位置からの対象識別手段4は、位置取得手段14から受けた位置座標(x,y)が、タグのID入力手段1が読み取った芯線タグ8の位置座標であることから、(2)式の関数により端子5の位置座標に変換する。図4aでは、読み取った芯線タグ8の位置座標から、xaを引いて、端子5の位置座標とする。そのうえで、機器9のIDから端子位置情報データベースDB2を参照して、該当する機器9の端子位置座標から、端子のIDを得る。さらに、得られた端子のIDから今度は設計情報データベースDB1を参照して、端子のIDとペアになる対象のID(芯線IDn)を得ることができる。芯線IDnの情報は、判定手段5に報告される。
【0038】
一連の流れを図4a,図4bで説明すると、タグ8aに入力手段1が当てられたとき、位置取得手段14は、タグ8aの位置(x1+xa,y1)を検知し、位置からの対象識別手段4は、xaを考慮して(x1,y1)を端子位置とする。そして、機器9についての図4bの座標をサーチして、ヒットする端子情報5aのID(0100)を得る。さらに、端子情報5aのID(0100)から、設計情報データベースDB1をサーチして、芯線ID(0010)を得る。芯線ID(0010)は、芯線7aのものであることから、位置からの対象識別手段4は、機器9について、端子5aには、芯線7aが接続されるべきであることを認知する。
【0039】
なお、(2)式の関数で保持する代わりに、あらかじめ芯線のID=G(機器のID,x、y)の関数を定めて表にして保持して用いると、処理を早くできるので良い。
【0040】
判定手段5は、2つの対象識別手段3,4から芯線IDについての報告を受け、次にこれを比較する。そして、芯線IDmと芯線IDnが一致していれば、設計情報データベースDB1に従ったケーブル接続がされているとして、「OK」表示および記録を行う。芯線IDmと芯線IDnが一致していなければ、「NG」表示および記録を行う。
【0041】
図5は、図1の接続支援装置の各部動作を模式的に示した図で、右側にタグによる対象識別、左側に位置による対象識別の流れを示す。
【0042】
まず、右側のタグによる対象識別では、データベースDB3の参照結果には、芯線のIDが読み取られたケースと、機器のIDが読み取られたケースとがある。前者の場合、対象識別手段3は、判定手段5に読み取った芯線のID(IDm)を報告するとともに、左側の位置による対象識別に対してトリガー信号を与える。なお、機器のIDが読み取られた後者のケースでは、対象識別手段4に報告するのみで、対象識別手段4は表示以外に格別の動作を起こさない。
【0043】
対象識別手段4は、トリガー信号を受けて、位置取得手段14による位置取得を実行し、以後位置補正のあとデータベースDB2,データベースDB1と順次参照して芯線のID(IDn)を判定手段5に報告する。判定手段5は、2つの異なる手法で判定された2つの芯線のID(IDnとIDm)を比較して、その一致結果を出力する。
【0044】
図6は、図1に示したタグのIDを用いた端子台端子とケーブル芯線の接続支援を行う装置の動作フローを示している。
【0045】
まず、手順S1では、タグのID入力手段1からの入力待ちをしている。手順S2では、タグのID入力があったときに手順S3に進み、ここでタグと対象関連付け情報データベースDB3を参照する。ID入力が機器ID(機器9に設定されたタブ80のID)であれば、手順S4により機器IDにタグと対象関連付け情報(タグのID)を設定する。機器IDでなければ、手順S1に戻り、手順S1の入力待ちの後、機器IDが入力されれば、手順S5の機器ID入力の処理後、手順S6に進む。ここまでの処理により、複数の現場機器のうちの特定の機器が対象物として設定された。従って、次の段階では、特定された機器についてのもう1つのタグである芯線についての入力を待つ。
【0046】
手順S6の入力待ちの後、タグのIDが入力されたとき、手順S7ではタグと対象関連付け情報(タグのID)データベースDB3を参照する。この結果、このタグが芯線のものであることを確認し、このときの芯線IDmを得る。
【0047】
次に手順S8では、芯線が確認されたことをトリガとして、位置取得手段14により補正された座標位置(x1、y1)を得る。
【0048】
手順S9では、この座標位置(x1、y1)をインデックスとして、端子位置情報データベースDB2を参照して端子の情報を得、さらに端子の情報をインデックスとして設計情報データベースDB1を参照することにより、芯線IDnを得る。
【0049】
手順S10では、判定(芯線IDm=芯線IDn)を行う。判定結果により、手順S11では「OK」表示と記録し、あるいは手順S12において「NG」表示と記録を行う。
【0050】
その後入力待ちS6に処理は移り、タグのIDが入力されれば同様に繰り返す。終了メニューが選ばれれば、処理を終了する。
【0051】
以上述べた実施例1においては、超音波を用いた位置取得手段14により座標軸上の位置を決定していた。
【実施例2】
【0052】
本実施例では、超音波を用いた位置取得手段の代わりに、プレート状入力手段を用いた位置取得手段による端子台端子とケーブル芯線の接続支援を行う装置の例を説明する。
【0053】
図7は、実施例2における端子台端子とケーブル芯線の接続支援を行う装置を示す構成図の例である。
【0054】
図1のうち、既に説明した図1に示された同一の符号を付された構成と、同一の機能を有する部分については、説明を省略する。
【0055】
現場機器9の端子は、端子台50に2列に並んだ端子である。端子5a、5b、5cにケーブル7の芯線7a、7b、7cが接続されている。芯線7a、7b、7cには各々タグ8a、8b、8cがはめられている。また、現場機器9には、機器を区別するためのタブ80が設けられている。これらのタグは、RFIDまたはバーコードまたはそのほかのICタグであり、タグのID入力手段1で、タグのIDを読み取ることができる。
【0056】
位置取得手段14は、端子台50に重ねるプレート状をしている。この位置取得手段14を2列の端子台50に重ねると、例えば右側列上から下に向けてタグ8−101〜8−117、左側列上から下に向けてタグ8−201〜8−217が見えるようにプレートにタグを配置しておく。
【0057】
タグのID入力手段1は、タグのIDを読み取ると、タグのIDからの対象識別手段3に、タグのIDを渡す。タグのIDからの対象識別手段3は、タグのIDを受けると、タグと対象関連付け情報データベースDB3を参照してタグと関連付けられた対象のIDと種類を得る。
【0058】
ここで、タグと対象関連付け情報データベースDB3の一例を図8に示す。図8は、基本的には実施例1のときのタグと対象関連付け情報データベースDB3と同じ構造をしているが、さらにプレートタグの関連情報を備えている。例えば、読み込まれたIDが3101のとき、プレート14のタグ8−101を意味し、IDが3102のとき、プレート14のタグ8−102を意味するといった具合である。
【0059】
このように、図7の実施例2の場合には、タグは機器9、芯線7、プレート14に使用されているので、IDと、機器9、芯線7、プレート14の関係が対応付けてデータベースDB3に記憶されている。
【0060】
対象識別手段3は、このデータベースDB3の照合結果として、種類が機器9またはプレート14であれば、信号線6を介して位置からの対象識別手段4に渡す。また種類が芯線7であれば、判定手段5に対象のID(芯線IDm)を渡し、位置からの対象識別手段4に芯線のIDが読み取られたトリガー信号を送る。
【0061】
位置からの対象識別手段4は、機器のIDを受けたならば機器のIDとして受けたIDをセットして記憶し、以後格別の動作を行わない。これに対し、芯線7のIDが読み取られたトリガー信号を受けたならば、データベースを参照して最終的に対象のID(端子IDn)を得て、判定手段5に渡す。
【0062】
判定手段5は、設計情報データベースDB1を参照して芯線IDmと端子IDnが一致していれば、設計情報データベースDB1に従ったケーブル接続がされているとして、「OK」表示および記録を行う。芯線IDmと芯線IDnが一致していなければ、「NG」表示および記録を行う。
【0063】
以下、位置からの対象識別手段4が、データベースを参照して最終的に対象のID(端子IDn)を得るまでの手順について説明するが、その前提としてデータベースDB内の2つのデータベースについて説明しておく。ここに備えるデータベースは、プレート位置情報データベースDB4と、実施例1でも説明した端子位置情報データベースDB2である。
【0064】
このうち、プレート位置情報データベースDB4は、図9の考えに従って構成されている。まず、図9aには、図7の端子台50にプレート(ユニバーサルプレート)14を被せた状態を示している。この図は、図7のプレート14をそのまま拡大表示している。右側白抜きの部分には、8−101から8−117までのタグが備えられている。
【0065】
図9bは、例えば図7の端子台50に設けた機器用のタグ80の添付位置を原点Oとしたときの、プレート14上の各タグの位置をX−Y座標軸上で表現したものである。
この場合に、タグは面的広がりを有するので、タグ8−101は、左上位置が(x1、y1)、右下位置が(x2、y2)となる矩形位置(x1、y1)(x2、y2)に位置することになる。同様に、タグ8−102は、左上位置が(x1、y3)、右下位置が(x2、y4)となる矩形位置(x1、y3)(x2、y4)に位置し、タグ8−103は、左上位置が(x1、y5)、右下位置が(x2、y6)となる矩形位置(x1、y5)(x2、y6)に位置している。
【0066】
他方で、プレート14を取り付けていない状態での端子5aの位置を、同じX−Y座標軸上で表現すると図9cのようになる。端子5aもまた面的広がりを有するので、左端位置がX1,上端位置がY1、右端位置がX2,下端位置がY2となる円形範囲に位置することになる。従って、当該端子5にプレート14をのせたとき、この端子5aの円形範囲の上部に位置することになるプレート内の座標は、(X1,Y1)(X2,Y2)の矩形位置に位置することになる。
【0067】
図10に示すプレート位置情報データベースDB4には、以上の関係からタグ8−101については、(x1、y1)(x2、y2)の矩形位置に位置する情報が保持されている。同様にタグ8−102については、(x1、y3)(x2、y4)の矩形位置に位置する情報が保持されている。
【0068】
なお、プレート位置情報データベースDB4には、全てのプレートタグについての位置情報を備えるのがよいが、プレートタグ間の距離や、大きさは同じであり、配置には規則性があることから、最小点の1点のみ保持し、プレートタグのID=プレートタグiがプレート内の座標(xi,yi)に位置する情報とサイズは共通で保持されていてもよい。
【0069】
図11の端子位置情報データベースDB2もまた、以上の関係から構成される。つまり、機器のIDとともに、端子5aについては、(X1,Y1)(X2,Y2)の矩形位置に位置する情報として保持されている。また同様に、端子5bについては、(X1,Y3)(X2,Y4)の矩形位置に位置する情報として保持されている。
【0070】
なお、この場合にも端子位置情報データベースDB2には、全ての端子についての位置情報を備えるのがよいが、端子間の距離や、大きさは同じであり、配置には規則性があることから、最小点の1点のみ保持し、サイズ(X2−X1,Y2−Y1)は共通で保持するものとすることができる。
【0071】
図12は、図7に示したタグのIDを用いた端子台端子とケーブル芯線の接続支援を行う装置の動作フローを示している。
【0072】
ここでは、手順S1で入力待ちの後、手順S2でタグのID入力がされると、手順S3でタグと対象関連付け情報データベースDB3を参照する。この結果、機器IDであれば、手順S4により機器IDとして、タグと対象関連付け情報(タグのID)を設定する。機器IDでなければ、手順S1に戻る。手順S1の入力待ちの後、機器IDが入力されれば、手順S5の機器ID入力の処理後、手順S6に進む。ここまでの処理により、複数の現場機器のうちの特定の機器が対象物として設定された。従って、次の段階では、特定された機器についてのほかのタグであるプレートと芯線についての入力を待つ。
【0073】
手順S6の入力待ちの後、タグのIDが入力されると、手順S7に進む。手順S7では、対象関連付け情報(タグのID)データベースDB3を検索して、これがプレート14に配置されたタグのIDであるプレートタグpであることを確認、設定する。プレートタグpは、タグのIDをそのまま用いても良いし、位置取得手段14であるプレート状の位置番号を用いても良い。
【0074】
手順S8では、位置からの対象識別手段4により、機器ID,プレートタグpにより対象位置情報データベースDBを参照して、最終的に端子IDの情報を得る。手順S8における詳細な処理過程を、図13により後述する。
【0075】
手順S9では、手順S8で得た端子IDが、不可であった場合、手順S6に戻り、次のタグIDの入力を待って、プレートタグについての処理を繰り返し実行する。また、プレートタグについての処理を完了した場合には、次に手順S10に移り、今度は最後に残されたケーブル芯線のタグについての処理を行う。
【0076】
ケーブル芯線のタグについての処理では、まずタグのIDの入力を受け、手順S11でタグと対象関連付け情報データベースDB3を参照する。この結果、タグのIDからの対象識別手段3により、タグのIDから芯線IDを得る。なお、図12に示してはいないが、芯線ID以外のものであれば、エラー表示にて、手順S6に戻る。
【0077】
次に、手順S12では設計情報データベースDB1を参照し、(端子ID、芯線ID)のペアが正しいかどうかを判定し、判定結果により、手順S11では「OK」表示と記録を行ない、あるいは手順S12において「NG」表示と記録を行う。
【0078】
なお、入力待ち処理手順S6に処理は移り、タグのIDが入力されれば同様に繰り返す。終了メニューが選ばれれば、処理を終了する。
【0079】
詳細説明を後回しにしたが、手順S8では、位置からの対象識別手段4により、機器ID,プレートタグpにより対象位置情報を参照して、端子IDに設定するが、その詳細を、図13にて説明する。
【0080】
この段階の説明では、機器IDが特定されている。またこの機器についてのプレートタグであることが、処理S7におけるタグと対象関連付け情報データベースDB3の参照により判明している。
【0081】
係る前提において、図13では、最初に処理S81,S82において、プレートタグpからプレート位置情報データベースDB4を参照してタグの位置情報(x1、y1)(x2、y2)を得る。この位置情報を得るには幾つかの方法がある。
【0082】
第1の方法は、図10のデータベースにおいて、プレートタグとして例えば8−101であるときには、プレートタグの欄の8−101に対応する位置の欄を検索してX−Y座標軸上の位置情報を得る。このとき、図10のデータベースDB4として、面的広がりを有するタグの大きさを意味する2点の情報を記憶しておくことで、タグの位置情報(x1、y1)(x2、y2)を得る。
【0083】
第2の方法は、データベースDB4としては、一点の情報(x1、y1)のみを記憶したデータベースとし、処理S81においてデータベース検索により(x1、y1)を得、更に手順S82において、サイズ情報を利用して、タグ位置の最大点(x2、y2)も得るものである。図13には後者の方法を示すが、いずれともできる。
【0084】
処理S83では、以下の処理を繰り返し実行するための初期設定として繰り返しインデックスCntを0に設定する。
【0085】
次に、手順S84−S86により、このプレートタグが、どの端子の位置に重なっているかを探索する。端子は、図9に示したように原点に近い列から、近い行からの順に端子位置情報に保持しておき、Cntを0に設定し、端子を順に座標位置が原点に近いほうから探す。
【0086】
手順S84では、図9cの端子側位置X1、Y1と、プレートタグ側位置を比較する。具体的には、X1>x1、またはY1>y1の関係が成立していることを確認する。
【0087】
この条件が成立するときには、このプレートタグ位置に重なる部分に、端子が存在しないので、端子位置が探せなかったとして、手順S89において、端子IDを「−1」にして処理を終わる。
【0088】
この条件が成立しないときには、このプレートタグ位置に重なる部分に、端子が存在すると考えられるので、次の手順S85では端子位置座標を特定する。この特定に当り、幾つかの方法がある。第1の方法は、端子位置を(X1,Y1)(X2,Y2)の矩形位置に位置する情報として保持しておきプレートタグ位置と比較する方法である。
【0089】
第2の方法は、端子位置として(X1,Y1)のみを記録しておいて、端子の幅や端子の高さから(X2,Y2)を求めて、最終的に矩形位置を決定する手法である。手順S85には、第2の方法に取る端子位置特定手法を記載している。
【0090】
次に、手順S86では、ここに示すアンド条件が成立することを確認する。この処理は例えば、端子位置の境界に位置するプレートタグが読み込まれた場合、手順S86の条件を満たさないため、このように終了し、図13の手順S84に戻る。このようにすれば、端子の境界のタグは読み飛ばされ、端子位置にちょうど重なるタグのみ有効となるため、作業が正確に行われる効果がある。
【0091】
最後に、手順S88において端子IDを特定する。この状態では、機器IDがすでに特定されている。かつ次にプレートタグの読み取りを座標原点から近い位置から順に実施した結果として、繰り返しインデックスCntがプレートタグ位置に相当するものになっている。従って、このときの繰り返しインデックスCntを参考に端子IDを特定することができる。
【0092】
なお、プレートタグ位置からの端子位置の特定に当っては、上記手法以外にも種々のやり方が考えられる。ここでは、その一例を示したに過ぎない。また、一般には、プレートタグの大きさと、端子の大きさは異なり、複数のプレートタグに重なることが考えられるが、このことも考慮の上で端子を特定することは容易に行えることである。
【0093】
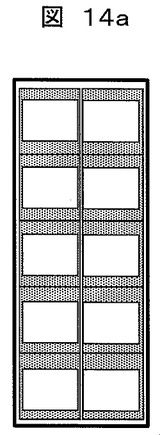
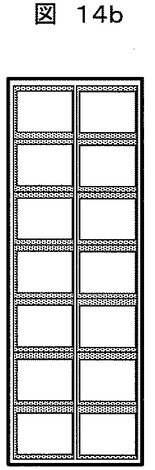
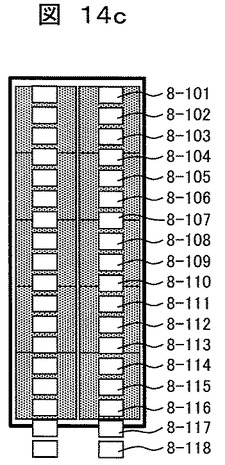
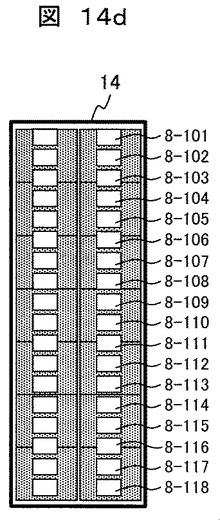
図14に、実施例2で用いる位置取得手段14としてのユニバーサルプレートの例を示す。図14dは、図9aで示したものと同様であり、プレート表面に重ねる端子台の端子エリアを示しているが、図14cは、プレートを透明にし、端子のピッチが異なる他の端子台に重ねた様子を示している。プレートを透明にし、端子サイズより小さいタグを用いれば、端子のピッチが異なる端子台に共通で用いることができる。
【0094】
また、図14a、図14bのように、端子台の固有のピッチ、長さでプレートを用意し、各端子に一つずつタグを配置しても良い。また、プレートを、布やビニールのようにフレキシブルな素材で作ることで、長さが異なる端子台で、上下左右に他の端子台やその他があって余った長さ分を納める場所が無い場合でも取り付け可能となる。図15に示すように、巻尺形状にして余る長さを巻き取ってケースに収める形状とすれば、扱いやすい。
【実施例3】
【0095】
本実施例では、位置取得手段が取り付けられない場合での端子台端子とケーブル芯線の接続支援を行う装置の例を説明する。
【0096】
図16は、実施例3における端子台端子とケーブル芯線の接続支援を行う装置を示す構成図の例である。
【0097】
図16のうち、既に説明した図1、図7に示された同一の符号を付された構成と、同一の機能を有する部分については、説明を省略する。
【0098】
現場機器9には、端子5a、5b、5cがあり、ケーブル7の芯線7a、7b、7cが接続されている。芯線7a、7b、7cには各々タグ8a、8b、8cがはめられている。タグは、RFIDまたはバーコードまたはそのほかのICタグであり、タグのID入力手段1で、タグのIDを読み取ることができる。
【0099】
タグのID入力手段1は、タグのIDまたは番号を読み取ると、タグのIDからの対象識別手段3に、タグのIDまたは番号を渡す。タグのIDからの対象識別手段3はタグのIDまたは番号を受けると、タグと対象関連付け情報データベースDB3を参照してタグと関連付けられた対象のIDと種類を得て、種類が機器であれば、位置からの対象識別手段4に渡し、種類が芯線であれば、判定手段5に対象のID(芯線IDm)を渡し、かつ位置からの対象識別手段4に芯線のIDが読み取られたトリガー信号を送る。
【0100】
実施例3では、データベースDBとして新たに端子順序定義情報データベースDB5を備える。ここには、機器ごとの端子の順序を定義する情報が保持してある。機器ごとに、いくつ端子が備えられているかと、各端子の順序を定義するために、機器IDと端子IDの順序列を記憶装置上に保持しておく。
【0101】
そのうえで、この実施例3の場合には検査員のタグのID入力手段1の操作方法(読み取り順序)を、所定の約束に従い実行させる。例えば、機器確認後のID入力手段1を近づけるときのタグ順序を、必ず機器の上部に位置するタグから下部のタグに向かって行わせるという約束の下に操作させる。
【0102】
このときに、位置からの対象識別手段4は、この実施例では、何番目の端子かという情報を端子IDに変換する働きをする。具体的には、位置からの対象識別手段4は、タグのIDからの対象識別手段3から、最初に機器のIDを受付け、次いで芯線のIDが読み取られたトリガー信号を受けつける。かつ、芯線のIDの取り込みは、この機器に固有の特定回数、継続して行われるはずである。
【0103】
このことから、まず機器のIDを受付けたならば、受けたIDを機器のIDとしてセットし、端子カウンターを初期値1にセットする。次いで、芯線のIDが読み取られたトリガー信号を受けたならば、端子順序定義情報データベースDB5を参照して、機器のIDと、端子IDの順序列の中から、端子カウンター値の順番である対象のID(端子IDn)を得て、判定手段5に渡す。
【0104】
判定手段5は、タグのIDからの対象識別手段3から芯線IDmを、位置からの対象識別手段4から端子IDnを受け付ける。そして、端子IDnをキーとして設計情報データベースDB1を参照し、芯線IDmのペアが端子IDnであるかどうかを判定する。もちろん、端子IDnのペアが芯線IDmであるかどうかを判定しても良い。
【0105】
判定手段5は、芯線IDmと芯線IDnが一致していれば、設計情報データベースDB1に従ったケーブル接続がされているとして、「OK」表示および記録を行う。芯線IDmと芯線IDnが一致していなければ、「NG」表示および記録を行う。
【0106】
図17は、図16に示したタグのIDを用いた端子台端子とケーブル芯線の接続支援を行う装置の動作フローを示している。
【0107】
手順S1で入力待ちの後、手順S2でタグのID入力がされれば、手順S3でタグと対象関連付け情報データベースDB3を参照する。機器のIDであれば、機器のIDにその値を設定する。機器のIDでなければ、手順S1に戻る(図17のフロー図にその処理は省いてある)。手順S1の入力待ちの後、機器IDが入力されれば、手順S4で機器のIDにその値を設定する。手順S5では、端子順序定義情報データベースDB5を参照して、セットされた機器IDについて、端子数がいくつあるかを調べNにセットし、端子カウンターcntを初期値1にセットする。手順S6で端子カウンターcntが端子数Nを超えれば、すべての端子について判定が終わったとして手順14で「すべてOK」の表示および記録をして処理を終了する。これにより、機器IDに対する処理が終了し、つぎに芯線タグに対する処理を行う。
【0108】
手順S7で入力待ちの後、タグのIDが入力されれば、手順S8により、芯線IDmにタグと対象関連付け情報(タグのID)を設定する。次に、手順S9により、端子順序定義情報データベースDB3を参照して、機器のIDと、端子IDの順序列の中から端子カウンターcntの順番である対象のIDを得て端子IDnを設定する。手順S10で、設計情報データベースDB1を参照し、芯線IDmのペアが端子IDnであるかどうかを判定する。もちろん、端子IDnのペアが芯線IDmであるかどうかを判定しても良い。判定結果が正しければ、手順11「OK」表示と記録を行い、手順12で端子カウンターcntを更新する。あるいは、判定結果が正しくなければ、手順13「NG」表示と記録を行う。
【0109】
実施例3では、端子順序定義情報データベースDB5に、機器ごとの端子の順序を定義する情報が保持するが、端子順序定義情報を作成する必要があり、その操作例について図18から図21を用いて、述べる。
【0110】
図18は、PC画面に表示する表示枠100に、機器91と、その端子台92を拡大表示した図である。この機器91には、端子台92があり、その端子5は3つ(5a,5b,5c)ある様子を示している。これらの情報は、通常は機器仕様として機器メーカーより提供される図面である。端子台92、端子5が画像情報である場合は、表示はされているが、端子台、端子の絵であることをPCは認識できない。このため、表示枠100の右上の「編集」ボタンを押すと、端子順序定義情報の定義モードになる。
【0111】
図19は、端子順序定義情報の定義モードでの画面表示例を示しており、定義モードでは新たにプロパティ定義画面93、オブジェクトメニュー画面94が追加表示される。
【0112】
このうち、オブジェクトメニュー画面94のオブジェクトの種類には、機器端子とRFIDがある。ユーザーは、機器端子メニュー941を指定して、このオブジェクトを端子5aに重ねる操作をすると、端子オブジェクト941aがその位置に定義される。RFIDメニュー942を指定して、このオブジェクトを、RFIDを取り付けた位置に置く操作をすると、RFIDオブジェクト942がその位置に定義される。各々のオブジェクトのプロパティは、プロパティ定義画面93で定義する。端子の機器内順序は、初期値は、端子オブジェクトが定義された順番値が入るが、その後、このモードにおいて変更することができる。
【0113】
図20は、図19の操作を受け付ける手順をフローにしたものである。手順S1でユーザーからの入力を待つ。オブジェクトが選択されれば、手順S2でRFIDタグオブジェクトであれば、手順S3でRFIDタグオブジェクトを追加、手順S4で対象のIDの定義を受け付ける。すなわち、対象の種類として機器・端子・芯線の値の入力を受け、設計上のIDを受ける。手順S2で機器端子オブジェクトであれば、機器端子オブジェクトを追加、手順S4で機器IDの定義を受け付ける。手順S6でリード順序の定義を受け付ける。手順S7では、定義内容を記憶手段に保存する。
【0114】
図21は、この実施例で、接続チェックの際に、芯線RFIDをリードした際の画面表示例を示したものである。実施例1、2でも同様に定義することで、RFIDをリードした、または、位置からの対象識別手段が検視した端子を、同様に強調表示すると、作業者に、作業状況を知らしめることができて、効率向上につながる。
【符号の説明】
【0115】
1:ケーブル接続支援装置
2:タグのID入力手段
3:タグのIDからの対象識別手段
4:位置からの対象識別手段
5:判定手段
5a、5b、5c:端子
6:信号線
7a、7b、7c:ケーブル7芯線
8a、8b、8c:タグ
9:現場機器
11、12:信号受信手段
13:信号発信手段
14:位置取得手段
50:端子台
80:機器のIDを示すタグ
DB:対象位置情報データベース
DB1:設計情報データベース
DB2:端子位置情報データベース
DB3:タグと対象関連付け情報データベース13:信号発信手段
【特許請求の範囲】
【請求項1】
タグを用いて現場機器の対象物の接続を確認する為の対象物確認装置であって、
対象物に取り付けられたタグから、そのIDを入力するID入力手段、該ID入力手段の出力から、対象物に関する第1の情報を得る第1の対象識別手段、前記タグの位置に相当する情報を取得する位置取得手段、該位置取得手段の出力から、対象物に関する第2の情報を得る第2の対象識別手段、第1の情報と第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認する判定手段とからなることを特徴とする対象物確認装置。
【請求項2】
第1項記載の対象物確認装置において、
前記第1の対象識別手段は、タグが設置された第1の対象物の情報をタグIDに関連つけて記憶する第1のデータベースを含み、
前記第2の対象識別手段は、前記第1の対象物に接続された第2の対象物の情報を前記位置に相当する情報に関連つけて記憶する第2のデータベースを含み、
さらに第1の対象物と第2の対象物の正しい組み合わせを記憶する第3のデータベースを備えることを特徴とする対象物確認装置。
【請求項3】
第2項記載の対象物確認装置において、
第1の対象物と第2の対象物は、現場機器の端子とケーブルとされることを特徴とする対象物確認装置。
【請求項4】
第1項乃至第3項のいずれかに記載の対象物確認装置において、
前記位置取得手段は、ID入力手段に取り付けられた信号発振手段と、該発振手段の信号を受信する信号受信手段と、該信号受信手段の出力から前記タグの位置を得る位置決定手段からなることを特徴とする対象物確認装置。
【請求項5】
第1項乃至第3項のいずれかに記載の対象物確認装置において、
前記位置取得手段は、前記対象物を覆い、かつ表面にその位置が明らかな複数のタグを備えたユニバーサルプレートと、該ユニバーサルプレート上の位置から前記対象物上の位置を定める位置決定手段からなることを特徴とする対象物確認装置。
【請求項6】
第1項乃至第3項のいずれかに記載の対象物確認装置において、
前記位置取得手段は、対象物上のタグ位置情報を備える記憶手段を含み、前記ID入力手段によるタグの読み取りは定まった順序に従い実行されることを特徴とする対象物確認装置。
【請求項7】
タグを用いて現場機器の第1の対象物と第2の対象物の接続を確認する為の対象物確認装置であって、
タグを備えた第1の対象物の情報を、タグIDに関連つけて記憶する第1のデータベース、前記第1の対象物に接続された第2の対象物の情報を前記タグの位置に相当する情報に関連つけて記憶する第2のデータベース、第1の対象物と第2の対象物の正しい組み合わせを記憶する第3のデータベースを備えることを特徴とする対象物確認装置。
【請求項8】
タグを用いて現場機器の対象物の接続を確認する為の対象物確認方法であって、
対象物に取り付けられたタグから、そのIDを入力して対象物に関する第1の情報を得、前記タグの位置に相当する情報を取得して対象物に関する第2の情報を得、第1の情報と第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認することを特徴とする対象物確認方法。
【請求項9】
タグを用いて現場機器の第1の対象物と第2の対象物の接続を確認する為の対象物確認方法であって、
第1の対象物に取り付けられたタグから、そのIDを入力して第1の対象物に関する第1の情報を得、前記タグの位置に相当する情報を取得して第2の対象物に関する第2の情報を得、第1の対象物についての第1の情報と第2の対象物についての第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認することを特徴とする対象物確認方法。
【請求項1】
タグを用いて現場機器の対象物の接続を確認する為の対象物確認装置であって、
対象物に取り付けられたタグから、そのIDを入力するID入力手段、該ID入力手段の出力から、対象物に関する第1の情報を得る第1の対象識別手段、前記タグの位置に相当する情報を取得する位置取得手段、該位置取得手段の出力から、対象物に関する第2の情報を得る第2の対象識別手段、第1の情報と第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認する判定手段とからなることを特徴とする対象物確認装置。
【請求項2】
第1項記載の対象物確認装置において、
前記第1の対象識別手段は、タグが設置された第1の対象物の情報をタグIDに関連つけて記憶する第1のデータベースを含み、
前記第2の対象識別手段は、前記第1の対象物に接続された第2の対象物の情報を前記位置に相当する情報に関連つけて記憶する第2のデータベースを含み、
さらに第1の対象物と第2の対象物の正しい組み合わせを記憶する第3のデータベースを備えることを特徴とする対象物確認装置。
【請求項3】
第2項記載の対象物確認装置において、
第1の対象物と第2の対象物は、現場機器の端子とケーブルとされることを特徴とする対象物確認装置。
【請求項4】
第1項乃至第3項のいずれかに記載の対象物確認装置において、
前記位置取得手段は、ID入力手段に取り付けられた信号発振手段と、該発振手段の信号を受信する信号受信手段と、該信号受信手段の出力から前記タグの位置を得る位置決定手段からなることを特徴とする対象物確認装置。
【請求項5】
第1項乃至第3項のいずれかに記載の対象物確認装置において、
前記位置取得手段は、前記対象物を覆い、かつ表面にその位置が明らかな複数のタグを備えたユニバーサルプレートと、該ユニバーサルプレート上の位置から前記対象物上の位置を定める位置決定手段からなることを特徴とする対象物確認装置。
【請求項6】
第1項乃至第3項のいずれかに記載の対象物確認装置において、
前記位置取得手段は、対象物上のタグ位置情報を備える記憶手段を含み、前記ID入力手段によるタグの読み取りは定まった順序に従い実行されることを特徴とする対象物確認装置。
【請求項7】
タグを用いて現場機器の第1の対象物と第2の対象物の接続を確認する為の対象物確認装置であって、
タグを備えた第1の対象物の情報を、タグIDに関連つけて記憶する第1のデータベース、前記第1の対象物に接続された第2の対象物の情報を前記タグの位置に相当する情報に関連つけて記憶する第2のデータベース、第1の対象物と第2の対象物の正しい組み合わせを記憶する第3のデータベースを備えることを特徴とする対象物確認装置。
【請求項8】
タグを用いて現場機器の対象物の接続を確認する為の対象物確認方法であって、
対象物に取り付けられたタグから、そのIDを入力して対象物に関する第1の情報を得、前記タグの位置に相当する情報を取得して対象物に関する第2の情報を得、第1の情報と第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認することを特徴とする対象物確認方法。
【請求項9】
タグを用いて現場機器の第1の対象物と第2の対象物の接続を確認する為の対象物確認方法であって、
第1の対象物に取り付けられたタグから、そのIDを入力して第1の対象物に関する第1の情報を得、前記タグの位置に相当する情報を取得して第2の対象物に関する第2の情報を得、第1の対象物についての第1の情報と第2の対象物についての第2の情報が組合せとして正しいことを判定して現場機器の対象物の接続を確認することを特徴とする対象物確認方法。
【図1】


【図2】
【図3】
【図4a】

【図4b】
【図5】

【図6】
【図7】
【図8】

【図9a】
【図9b】
【図9c】
【図10】
【図11】

【図12】

【図13】
【図14a】
【図14b】
【図14c】
【図14d】
【図15】

【図16】
【図17】
【図18】

【図19】
【図20】
【図21】
【図2】
【図3】
【図4a】
【図4b】
【図5】
【図6】
【図7】
【図8】
【図9a】
【図9b】
【図9c】
【図10】
【図11】
【図12】
【図13】
【図14a】
【図14b】
【図14c】
【図14d】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2012−128544(P2012−128544A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−277668(P2010−277668)
【出願日】平成22年12月14日(2010.12.14)
【出願人】(507250427)日立GEニュークリア・エナジー株式会社 (858)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月14日(2010.12.14)
【出願人】(507250427)日立GEニュークリア・エナジー株式会社 (858)
【Fターム(参考)】
[ Back to top ]