
対象物認識システム
【課題】 あらかじめすべてのサンプルパターンを登録することなく、新たにサンプルパターンを生成することのできる対象物認識システムを提供する。
【解決手段】 画像処理部9は、信号機3の点灯状態に基づいて検出対象を選択する検出対象選択部10と、歩行者のサンプルパターンを格納するためのパターン格納部13と、検出対象選択部10により歩行者が選択された場合に、カメラ4の画像から抽出された移動体とパターン格納部13のサンプルパターンとを比較して移動体を検出する歩行者検出部11と、歩行者検出部11により抽出された移動体とサンプルパターンとが一致しない場合に、この抽出された移動体を新たなサンプルパターンとして生成するパターン生成部14と、を備えている。
【解決手段】 画像処理部9は、信号機3の点灯状態に基づいて検出対象を選択する検出対象選択部10と、歩行者のサンプルパターンを格納するためのパターン格納部13と、検出対象選択部10により歩行者が選択された場合に、カメラ4の画像から抽出された移動体とパターン格納部13のサンプルパターンとを比較して移動体を検出する歩行者検出部11と、歩行者検出部11により抽出された移動体とサンプルパターンとが一致しない場合に、この抽出された移動体を新たなサンプルパターンとして生成するパターン生成部14と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は対象物認識システムに係り、特に、あらかじめすべてのサンプルパターンを登録することなく、新たにサンプルパターンを生成することを可能とした対象物認識システムに関するものである。
【背景技術】
【0002】
一般的に、横断歩道に設置される歩行者用信号機においては、横断歩道を渡る歩行者の有無にかかわらず、ある決められた固定秒数で青色または赤色の点灯を切り換え表示するようになっている。
【0003】
しかしながら、これでは横断歩道に歩行者がいない場合でも歩行者用信号機が青色点灯されてしまったり、あるいは歩行者がまだ横断歩道を渡っている途中に歩行者用信号機が赤色点灯されてしまうといった不都合が生じうる。そのため、従来から、横断歩道に歩行者検出装置を設け、この歩行者検出装置により、横断歩道内の歩行者を検出することで、歩行者用信号機の制御を行うシステムが開発されている。
【0004】
このような歩行者を検出する技術として、従来、横断歩道を横断する歩行者の画像を取得するためのカメラと、歩行者のうち計測領域における最後尾に位置する歩行者を検出しこの最後尾の歩行者の位置情報および速度から横断予測時間を算出する歩行者検知装置と、歩行者検知装置による横断予測時間に基づいて歩行者用信号機の点灯を制御する信号制御装置と、を備えた技術が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−250756号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、前記特許文献1に記載の技術は、歩行者検知装置により、カメラから送られる画像のうち横断歩道を自動的に検出し、横断歩道に対応する計測領域をあらかじめ設定して、歩行者を自動的に検出することが可能であるが、前記従来の技術においては、歩行者の検出を行う場合に、計測領域において移動体を抽出してサンプルパターンと比較することで、歩行者であるか否かを認識するようにしているため、システムの設置場所ごとに十分なサンプルパターンを収集し、あらかじめ登録しておく必要があるという問題を有している。
【0007】
そして、認識に失敗した場合には、失敗したサンプルパターンを持ち帰り、新たにサンプルパターンの追加登録を行う必要があり、このような作業を繰り返して行うことにより、サンプルパターンをほぼ完全なものとする必要があった。これは、システムの設置場所における設置高さや設置角度などによって歩行者のサンプルパターンが異なるため、一般的に歩行者として認識できるサンプルパターンの他に、各設置場所ごとのサンプルパターンが必要なためである。そのため、対象認識するシステムを設置するまでに多くの手間が掛かってしまうという問題を有している。
【0008】
本発明は前記した点に鑑みてなされたものであり、あらかじめすべてのサンプルパターンを登録することなく、新たにサンプルパターンを生成することのできる対象物認識システムを提供することを目的とするものである。
【課題を解決するための手段】
【0009】
本発明は前記目的を達成するために、請求項1の発明に係る対象物認識システムは、横断歩道部分の画像を取得するためのカメラと、
前記信号機の点灯状態に基づいて検出対象を選択する検出対象選択部と、対象物のサンプルパターンを格納するためのパターン格納部と、前記カメラの画像から抽出された移動体と前記パターン格納部のサンプルパターンとを比較して移動体を検出する移動体検出部と、前記移動体検出部により抽出された移動体と前記サンプルパターンとが一致しない場合に、この抽出された移動体を新たなサンプルパターンとして生成するパターン生成部と、からなる画像処理部を備えた検出装置と、
を備えていることを特徴とする。
【0010】
請求項2に係る発明は、請求項1において、移動体検出部は、前記検出対象選択部により検出対象の移動体として歩行者が選択された場合に、前記カメラの画像から抽出された移動体と前記パターン格納部のサンプルパターンとを比較して歩行者を検出する歩行者検出部であり、前記パターン生成部は、前記歩行者検出部により抽出された移動体と前記サンプルパターンとが一致しない場合に、この抽出された移動体を歩行者の新たなサンプルパターンとして生成することを特徴とする。
【0011】
請求項3に係る発明は、請求項1または請求項2において、移動体検出部は、前記検出対象選択部により検出対象の移動体として車両が選択された場合に、前記カメラの画像から抽出された移動体と前記パターン格納部のサンプルパターンとを比較して車両を検出する車両検出部であり、前記パターン生成部は、前記車両検出部により抽出された移動体と前記サンプルパターンとが一致しない場合に、この抽出された移動体を車両の新たなサンプルパターンとして生成することを特徴とする。
【0012】
請求項4に係る発明は、請求項1から請求項3のいずれか一項において、前記検出対象選択部は、前記信号制御装置から送られる灯色情報に基づいて前記信号機の点灯状態を検出して検出対象を選択することを特徴とする。
【0013】
請求項5に係る発明は、請求項1から請求項3のいずれか一項において、前記検出対象選択部は、前記カメラの画像に基づいて前記信号機の点灯状態を検出して検出対象を選択することを特徴とする。
【0014】
請求項6に係る発明は、請求項1から請求項5のいずれか一項において、前記検出装置は、前記カメラから送られる画像から横断歩道を自動的に検出し、横断歩道に対応する計測領域をあらかじめ設定するものであることを特徴とする。
【発明の効果】
【0015】
請求項1に係る発明によれば、画像処理部の移動体検出部により、移動体がサンプルパターンと一致しない場合に、パターン生成部により対象となる移動体を新たなサンプルパターンとして生成し、パターン格納部に格納するようにしているので、実際にシステムを動作させることにより、新たなサンプルパターンを随時登録することができる。そのため、あらかじめサンプルパターンを登録しておく必要がなく、対象認識するシステムの設置を容易に行うことができる。
【0016】
請求項2に係る発明によれば、移動体検出部を、検出対象選択部により検出対象の移動体として歩行者が選択された場合に、カメラの画像から抽出された移動体とパターン格納部のサンプルパターンとを比較して歩行者を検出する歩行者検出部とし、パターン生成部により、歩行者検出部により抽出された移動体とサンプルパターンとが一致しない場合に、この抽出された移動体を歩行者の新たなサンプルパターンとして生成するようにしているので、実際にシステムを動作させることにより、歩行者の新たなサンプルパターンを随時登録することができ、対象認識するシステムの設置を容易に行うことができる。
【0017】
請求項3に係る発明によれば、移動体検出部を、検出対象選択部により検出対象の移動体として車両が選択された場合に、カメラの画像から抽出された移動体とパターン格納部のサンプルパターンとを比較して車両を検出する車両検出部とし、パターン生成部により、車両検出部により抽出された移動体とサンプルパターンとが一致しない場合に、この抽出された移動体を車両の新たなサンプルパターンとして生成するようにしているので、実際にシステムを動作させることにより、車両の新たなサンプルパターンを随時登録することができ、対象認識するシステムの設置を容易に行うことができる。
【0018】
請求項4に係る発明によれば、検出対象選択部により、信号制御装置から送られる灯色情報に基づいて信号機の点灯状態を検出して検出対象を選択するようにしているので、適正に検出対象を選択することができる。
【0019】
請求項5に係る発明によれば、検出対象選択部により、カメラの画像に基づいて信号機の点灯状態を検出して検出対象を選択するようにしているので、適正に検出対象を選択することができる。
【0020】
請求項6に係る発明によれば、検出装置によりカメラから送られる画像から横断歩道を自動的に検出し、横断歩道に対応する計測領域をあらかじめ設定するようにしているので、カメラによる画像に基づいて逐次計測領域を手動で設定する必要がなく、カメラの設置作業が容易であり、かつ、システムの設定も容易となる。
【図面の簡単な説明】
【0021】
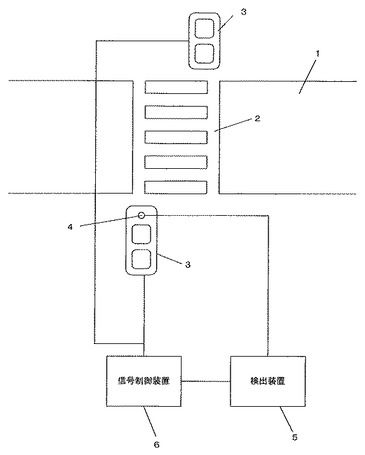
【図1】本発明に係る対象物認識システムの実施形態を示す概略図である。
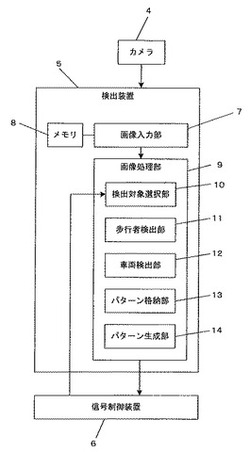
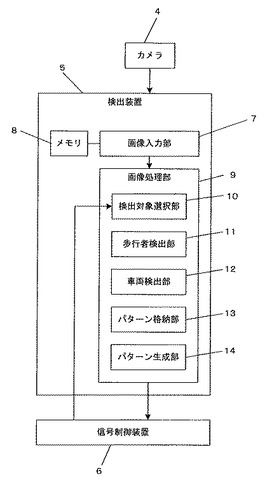
【図2】本発明に係る対象物認識システムの実施形態における制御構成を示すブロック図である。
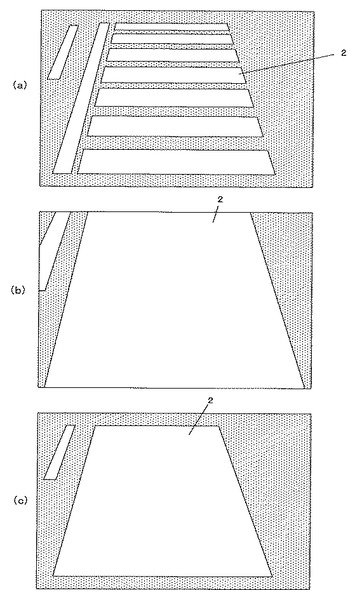
【図3】図3(a)、(b)、(c)は本発明に係る対象物認識システムの実施形態における横断歩道の抽出動作を示すそれぞれ説明図である。
【図4】本発明に係る対象物認識システムの実施形態における歩行者のパターン認識処理を示す説明図である。
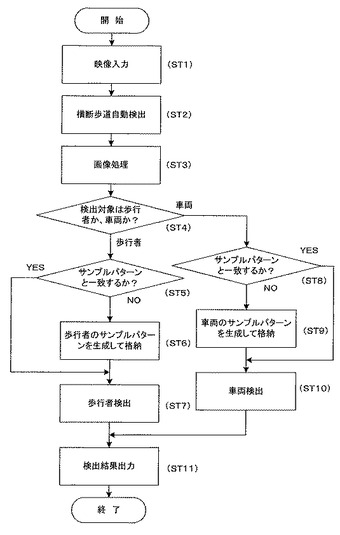
【図5】本発明に係る対象物認識システムの実施形態の動作を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態について図面を参照しながら説明する。
【0023】
図1は本発明に係る対象物認識システムの実施形態を示す概略図である。図1に示すように、道路1には、横断歩道2を挟んで対向するように歩行者用信号機3が設置されている。この歩行者用信号機3のうち、一方の歩行者用信号機3には、横断歩道2を横断する歩行者または道路1を走行する車両の画像を取得するためのカメラ4が内蔵されている。
【0024】
また、カメラ4には、このカメラ4により取得される画像から横断歩道2を渡る歩行者を検出するとともに、道路1を走行して横断歩道2を通過する車両を検出するための検出装置5が接続されている。この検出装置5には、歩行者用信号機3の制御を行う信号制御装置6が接続されている。そして、カメラ4および検出装置5により対象物認識システムが構成されるようになっている。
【0025】
図2は本発明に係る対象物認識システムの実施形態を示すブロック図である。図2に示すように、検出装置5は、カメラ4による画像を入力する画像入力部7を備えており、この画像入力部7により入力された画像は、メモリ8に一時的に記憶されるように構成されている。
【0026】
また、検出装置5は、画像入力部7から入力された画像を処理する画像処理部9を備えている。また、画像処理部9には、この信号制御装置6により制御されている灯色情報が送られるように構成されており、画像処理部9は、信号制御装置6から出力される灯色情報に基づいて検出すべき対象が歩行者であるか、車両であるかを選択する検出対象選択部10を備えている。すなわち、歩行者用信号機3が青の場合は、歩行者が横断歩道2を渡ることができることになるので、検出すべき対象は、歩行者となる。一方、歩行者用信号機3が赤の場合は、歩行者が横断歩道2を渡ることができず、車両が走行することになるので、検出すべき対象は車両となる。このように検出対象選択部10は、信号制御装置6から送られる灯色情報が青であるか赤であるによって検出すべき対象を選択するようになっている。
【0027】
また、画像処理部9は、検出対象選択部10により選択された検出対象が歩行者であった場合に、画像入力部7から入力される画像に基づいて歩行者を検出する移動体検出部としての歩行者検出部11を備えており、画像処理部9は、検出画像選択部により選択された検出画像が車両であった場合に、画像入力部7から入力される画像に基づいて車両を検出する移動体検出部としての車両検出部12を備えている。
【0028】
さらに、本実施形態においては、画像処理部は、歩行者のサンプルパターンを格納するためのパターン格納部13を備えており、画像処理部は、新たなサンプルパターンを生成するパターン生成部14を備えている。
【0029】
画像処理部9の歩行者検出部11は、カメラ4から送られる画像のうち横断歩道2を自動的に検出し、横断歩道2に対応する計測領域をあらかじめ設定することができるようになっている。この横断歩道2の自動検出手段としては、例えば、図3(a)に示すように、まず、カメラ4が設置された高さ、画角、俯角などの設置条件をあらかじめ取得しておき、画像内における各座標の実距離を算出する。続いて、画像内の白線部分を抽出して2値化した後、図3(b)に示すように、この2値化画像について実距離30cm四方の領域を膨張するとともに、図3(c)に示すように、再び縮退することにより得られた台形部分を横断歩道2に対応する計測領域とするものである。
【0030】
そして、図4に示すように、歩行者検出部11は、計測領域において、画像の各画素ごとにサーチすることにより、移動体を抽出して、この移動体をパターン格納部13に格納された各サンプルパターンと比較するように構成されている。そして、歩行者検出部は、移動体がサンプルパターンと一致した場合には、移動体が歩行者であると判断して歩行者を検出するものであり、サンプルパターンと一致しない場合には、パターン生成部14により移動体を新たなサンプルパターンとして生成してパターン格納部13に格納するように構成されている。すなわち、歩行者信号機が青に制御されている状態では、灯色情報に基づいて検出画像選択部により検出対象が歩行者であると選択されるが、この場合には、横断歩道を渡る移動体は、基本的にすべて歩行者であり、自動車や自動二輪車などの車両が移動することはないと考えられるためである。
【0031】
また、同様に、車両検出部は、計測領域において移動体を抽出して、この移動体をパターン格納部13に格納された各サンプルパターンと比較するように構成されている。そして、歩行者検出部は、移動体がサンプルパターンと一致した場合には、移動体が車両であると判断して車両を検出するものであり、サンプルパターンと一致しない場合には、パターン生成部14により移動体を新たなサンプルパターンとして生成してパターン格納部13に格納するように構成されている。すなわち、歩行者信号機が赤に制御されている状態では、灯色情報に基づいて検出画像選択部により検出対象が車両であると選択されるが、この場合には、横断歩道を通過する移動体は、基本的にすべて車両であり、歩行者が移動することはないと考えられるためである。
【0032】
次に、本実施形態の作用について図5に示すフローチャートを参照して説明する。
【0033】
まず、本実施形態においては、カメラ4により撮影された画像は、画像入力部7を介して画像処理部9に入力されるとともに(ST1)、所定のメモリ8に記憶される。
【0034】
画像処理部9は、カメラ4から送られる画像のうち横断歩道2を自動的に検出し、横断歩道2に対応する計測領域を設定して(ST2)、画像処理部9により画像処理を開始する(ST3)。
【0035】
一方、検出対象選択部10は、信号制御装置6から送られる灯色情報に基づいて、歩行者用信号機3が青の場合は、検出すべき対象を歩行者とし、歩行者用信号機3が赤の場合は、検出すべき対象画像を車両とする(ST4)。
【0036】
そして、検出対象選択部10により、検出画像として歩行者が選択された場合は(ST5)、画像処理部9の歩行者検出部11により、カメラ4により撮影された画像の計測領域において、画像の各画素ごとにサーチすることにより、移動体を抽出して、この移動体をパターン格納部13に格納された各サンプルパターンと比較する。そして、歩行者検出部11は、移動体がサンプルパターンと一致した場合には(ST5:YES)、移動体が歩行者であると判断して歩行者を検出する(ST7)。一方、移動体がサンプルパターンと一致しない場合には(ST5:NO)、パターン生成部14により対象となる移動体を歩行者の新たなサンプルパターンとして生成し、パターン格納部13に格納する(ST6)。その後、歩行者の検出を行う(ST7)
【0037】
また、同様に、検出対象選択部10により、検出画像として車両が選択された場合は、画像処理部9の車両検出部12により、カメラ4により撮影された画像の計測領域において、画像の各画素ごとにサーチすることにより、移動体を抽出して、この移動体をパターン格納部13に格納された各サンプルパターンと比較する。そして、歩行者検出部11は、移動体がサンプルパターンと一致した場合には(ST8:YES)、移動体が車両であると判断して車両を検出する(ST10)。一方、移動体がサンプルパターンと一致しない場合には(ST8:YES)、パターン生成部14により対象となる移動体を車両の新たなサンプルパターンとして生成し、パターン格納部13に格納する(ST9)。その後、車両の検出を行う(ST10)
【0038】
この歩行者の検出結果または車両の検出結果は、信号制御装置6に出力され(ST11)、信号制御装置6は、歩行者または車両の有無に基づいて歩行者用信号機3の青色点灯あるいは点滅または赤色点灯などの点灯制御を行う。
【0039】
以上述べたように本実施形態においては、画像処理部9の歩行者検出部11または車両検出部12により、移動体がサンプルパターンと一致しない場合に、パターン生成部14により対象となる移動体を歩行者または車両の新たなサンプルパターンとして生成し、パターン格納部13に格納するようにしているので、実際にシステムを動作させることにより、新たなサンプルパターンを随時登録することができる。そのため、あらかじめサンプルパターンを登録しておく必要がなく、対象認識するシステムの設置を容易に行うことができる。
【0040】
さらに、画像処理部9により、カメラ4の設置位置に応じて、カメラ4から送られる画像のうち横断歩道2を自動的に検出し、横断歩道2に対応する計測領域をあらかじめ設定するようにしており、カメラ4による画像に基づいて逐次計測領域を手動で設定する必要がないので、カメラ4の設置作業が容易であり、かつ、システムの設定も容易となる。
【0041】
なお、前記実施形態においては、信号制御装置6からの灯色情報に基づいて、検出対象を歩行者であるか車両であるか選択するようにしたが、例えば、カメラ4による撮影画像に基づいて、横断歩道2を挟んで対向する歩行者用信号機3の点灯状態を検出することにより、画像処理部9により歩行者用信号機3が青であるか、赤であるかを判断するようにしてもよい。
【0042】
なお、前記実施形態においては、移動体のサンプルパターンとして歩行者および車両のサンプルパターンを生成するようにしたが、例えば、歩行者のみあるいは車両ののみのサンプルパターンを生成するようにしてもよい。
【0043】
また、本発明は前記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々の変形が可能である。
【符号の説明】
【0044】
1 道路
2 横断歩道
3 歩行者用信号機
4 カメラ
5 検出装置
6 信号制御装置
7 画像入力部
8 メモリ
9 画像処理部
10 検出対象選択部
11 歩行者検出部
12 車両検出部
13 パターン格納部
14 パターン生成部
【技術分野】
【0001】
本発明は対象物認識システムに係り、特に、あらかじめすべてのサンプルパターンを登録することなく、新たにサンプルパターンを生成することを可能とした対象物認識システムに関するものである。
【背景技術】
【0002】
一般的に、横断歩道に設置される歩行者用信号機においては、横断歩道を渡る歩行者の有無にかかわらず、ある決められた固定秒数で青色または赤色の点灯を切り換え表示するようになっている。
【0003】
しかしながら、これでは横断歩道に歩行者がいない場合でも歩行者用信号機が青色点灯されてしまったり、あるいは歩行者がまだ横断歩道を渡っている途中に歩行者用信号機が赤色点灯されてしまうといった不都合が生じうる。そのため、従来から、横断歩道に歩行者検出装置を設け、この歩行者検出装置により、横断歩道内の歩行者を検出することで、歩行者用信号機の制御を行うシステムが開発されている。
【0004】
このような歩行者を検出する技術として、従来、横断歩道を横断する歩行者の画像を取得するためのカメラと、歩行者のうち計測領域における最後尾に位置する歩行者を検出しこの最後尾の歩行者の位置情報および速度から横断予測時間を算出する歩行者検知装置と、歩行者検知装置による横断予測時間に基づいて歩行者用信号機の点灯を制御する信号制御装置と、を備えた技術が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−250756号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、前記特許文献1に記載の技術は、歩行者検知装置により、カメラから送られる画像のうち横断歩道を自動的に検出し、横断歩道に対応する計測領域をあらかじめ設定して、歩行者を自動的に検出することが可能であるが、前記従来の技術においては、歩行者の検出を行う場合に、計測領域において移動体を抽出してサンプルパターンと比較することで、歩行者であるか否かを認識するようにしているため、システムの設置場所ごとに十分なサンプルパターンを収集し、あらかじめ登録しておく必要があるという問題を有している。
【0007】
そして、認識に失敗した場合には、失敗したサンプルパターンを持ち帰り、新たにサンプルパターンの追加登録を行う必要があり、このような作業を繰り返して行うことにより、サンプルパターンをほぼ完全なものとする必要があった。これは、システムの設置場所における設置高さや設置角度などによって歩行者のサンプルパターンが異なるため、一般的に歩行者として認識できるサンプルパターンの他に、各設置場所ごとのサンプルパターンが必要なためである。そのため、対象認識するシステムを設置するまでに多くの手間が掛かってしまうという問題を有している。
【0008】
本発明は前記した点に鑑みてなされたものであり、あらかじめすべてのサンプルパターンを登録することなく、新たにサンプルパターンを生成することのできる対象物認識システムを提供することを目的とするものである。
【課題を解決するための手段】
【0009】
本発明は前記目的を達成するために、請求項1の発明に係る対象物認識システムは、横断歩道部分の画像を取得するためのカメラと、
前記信号機の点灯状態に基づいて検出対象を選択する検出対象選択部と、対象物のサンプルパターンを格納するためのパターン格納部と、前記カメラの画像から抽出された移動体と前記パターン格納部のサンプルパターンとを比較して移動体を検出する移動体検出部と、前記移動体検出部により抽出された移動体と前記サンプルパターンとが一致しない場合に、この抽出された移動体を新たなサンプルパターンとして生成するパターン生成部と、からなる画像処理部を備えた検出装置と、
を備えていることを特徴とする。
【0010】
請求項2に係る発明は、請求項1において、移動体検出部は、前記検出対象選択部により検出対象の移動体として歩行者が選択された場合に、前記カメラの画像から抽出された移動体と前記パターン格納部のサンプルパターンとを比較して歩行者を検出する歩行者検出部であり、前記パターン生成部は、前記歩行者検出部により抽出された移動体と前記サンプルパターンとが一致しない場合に、この抽出された移動体を歩行者の新たなサンプルパターンとして生成することを特徴とする。
【0011】
請求項3に係る発明は、請求項1または請求項2において、移動体検出部は、前記検出対象選択部により検出対象の移動体として車両が選択された場合に、前記カメラの画像から抽出された移動体と前記パターン格納部のサンプルパターンとを比較して車両を検出する車両検出部であり、前記パターン生成部は、前記車両検出部により抽出された移動体と前記サンプルパターンとが一致しない場合に、この抽出された移動体を車両の新たなサンプルパターンとして生成することを特徴とする。
【0012】
請求項4に係る発明は、請求項1から請求項3のいずれか一項において、前記検出対象選択部は、前記信号制御装置から送られる灯色情報に基づいて前記信号機の点灯状態を検出して検出対象を選択することを特徴とする。
【0013】
請求項5に係る発明は、請求項1から請求項3のいずれか一項において、前記検出対象選択部は、前記カメラの画像に基づいて前記信号機の点灯状態を検出して検出対象を選択することを特徴とする。
【0014】
請求項6に係る発明は、請求項1から請求項5のいずれか一項において、前記検出装置は、前記カメラから送られる画像から横断歩道を自動的に検出し、横断歩道に対応する計測領域をあらかじめ設定するものであることを特徴とする。
【発明の効果】
【0015】
請求項1に係る発明によれば、画像処理部の移動体検出部により、移動体がサンプルパターンと一致しない場合に、パターン生成部により対象となる移動体を新たなサンプルパターンとして生成し、パターン格納部に格納するようにしているので、実際にシステムを動作させることにより、新たなサンプルパターンを随時登録することができる。そのため、あらかじめサンプルパターンを登録しておく必要がなく、対象認識するシステムの設置を容易に行うことができる。
【0016】
請求項2に係る発明によれば、移動体検出部を、検出対象選択部により検出対象の移動体として歩行者が選択された場合に、カメラの画像から抽出された移動体とパターン格納部のサンプルパターンとを比較して歩行者を検出する歩行者検出部とし、パターン生成部により、歩行者検出部により抽出された移動体とサンプルパターンとが一致しない場合に、この抽出された移動体を歩行者の新たなサンプルパターンとして生成するようにしているので、実際にシステムを動作させることにより、歩行者の新たなサンプルパターンを随時登録することができ、対象認識するシステムの設置を容易に行うことができる。
【0017】
請求項3に係る発明によれば、移動体検出部を、検出対象選択部により検出対象の移動体として車両が選択された場合に、カメラの画像から抽出された移動体とパターン格納部のサンプルパターンとを比較して車両を検出する車両検出部とし、パターン生成部により、車両検出部により抽出された移動体とサンプルパターンとが一致しない場合に、この抽出された移動体を車両の新たなサンプルパターンとして生成するようにしているので、実際にシステムを動作させることにより、車両の新たなサンプルパターンを随時登録することができ、対象認識するシステムの設置を容易に行うことができる。
【0018】
請求項4に係る発明によれば、検出対象選択部により、信号制御装置から送られる灯色情報に基づいて信号機の点灯状態を検出して検出対象を選択するようにしているので、適正に検出対象を選択することができる。
【0019】
請求項5に係る発明によれば、検出対象選択部により、カメラの画像に基づいて信号機の点灯状態を検出して検出対象を選択するようにしているので、適正に検出対象を選択することができる。
【0020】
請求項6に係る発明によれば、検出装置によりカメラから送られる画像から横断歩道を自動的に検出し、横断歩道に対応する計測領域をあらかじめ設定するようにしているので、カメラによる画像に基づいて逐次計測領域を手動で設定する必要がなく、カメラの設置作業が容易であり、かつ、システムの設定も容易となる。
【図面の簡単な説明】
【0021】
【図1】本発明に係る対象物認識システムの実施形態を示す概略図である。
【図2】本発明に係る対象物認識システムの実施形態における制御構成を示すブロック図である。
【図3】図3(a)、(b)、(c)は本発明に係る対象物認識システムの実施形態における横断歩道の抽出動作を示すそれぞれ説明図である。
【図4】本発明に係る対象物認識システムの実施形態における歩行者のパターン認識処理を示す説明図である。
【図5】本発明に係る対象物認識システムの実施形態の動作を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態について図面を参照しながら説明する。
【0023】
図1は本発明に係る対象物認識システムの実施形態を示す概略図である。図1に示すように、道路1には、横断歩道2を挟んで対向するように歩行者用信号機3が設置されている。この歩行者用信号機3のうち、一方の歩行者用信号機3には、横断歩道2を横断する歩行者または道路1を走行する車両の画像を取得するためのカメラ4が内蔵されている。
【0024】
また、カメラ4には、このカメラ4により取得される画像から横断歩道2を渡る歩行者を検出するとともに、道路1を走行して横断歩道2を通過する車両を検出するための検出装置5が接続されている。この検出装置5には、歩行者用信号機3の制御を行う信号制御装置6が接続されている。そして、カメラ4および検出装置5により対象物認識システムが構成されるようになっている。
【0025】
図2は本発明に係る対象物認識システムの実施形態を示すブロック図である。図2に示すように、検出装置5は、カメラ4による画像を入力する画像入力部7を備えており、この画像入力部7により入力された画像は、メモリ8に一時的に記憶されるように構成されている。
【0026】
また、検出装置5は、画像入力部7から入力された画像を処理する画像処理部9を備えている。また、画像処理部9には、この信号制御装置6により制御されている灯色情報が送られるように構成されており、画像処理部9は、信号制御装置6から出力される灯色情報に基づいて検出すべき対象が歩行者であるか、車両であるかを選択する検出対象選択部10を備えている。すなわち、歩行者用信号機3が青の場合は、歩行者が横断歩道2を渡ることができることになるので、検出すべき対象は、歩行者となる。一方、歩行者用信号機3が赤の場合は、歩行者が横断歩道2を渡ることができず、車両が走行することになるので、検出すべき対象は車両となる。このように検出対象選択部10は、信号制御装置6から送られる灯色情報が青であるか赤であるによって検出すべき対象を選択するようになっている。
【0027】
また、画像処理部9は、検出対象選択部10により選択された検出対象が歩行者であった場合に、画像入力部7から入力される画像に基づいて歩行者を検出する移動体検出部としての歩行者検出部11を備えており、画像処理部9は、検出画像選択部により選択された検出画像が車両であった場合に、画像入力部7から入力される画像に基づいて車両を検出する移動体検出部としての車両検出部12を備えている。
【0028】
さらに、本実施形態においては、画像処理部は、歩行者のサンプルパターンを格納するためのパターン格納部13を備えており、画像処理部は、新たなサンプルパターンを生成するパターン生成部14を備えている。
【0029】
画像処理部9の歩行者検出部11は、カメラ4から送られる画像のうち横断歩道2を自動的に検出し、横断歩道2に対応する計測領域をあらかじめ設定することができるようになっている。この横断歩道2の自動検出手段としては、例えば、図3(a)に示すように、まず、カメラ4が設置された高さ、画角、俯角などの設置条件をあらかじめ取得しておき、画像内における各座標の実距離を算出する。続いて、画像内の白線部分を抽出して2値化した後、図3(b)に示すように、この2値化画像について実距離30cm四方の領域を膨張するとともに、図3(c)に示すように、再び縮退することにより得られた台形部分を横断歩道2に対応する計測領域とするものである。
【0030】
そして、図4に示すように、歩行者検出部11は、計測領域において、画像の各画素ごとにサーチすることにより、移動体を抽出して、この移動体をパターン格納部13に格納された各サンプルパターンと比較するように構成されている。そして、歩行者検出部は、移動体がサンプルパターンと一致した場合には、移動体が歩行者であると判断して歩行者を検出するものであり、サンプルパターンと一致しない場合には、パターン生成部14により移動体を新たなサンプルパターンとして生成してパターン格納部13に格納するように構成されている。すなわち、歩行者信号機が青に制御されている状態では、灯色情報に基づいて検出画像選択部により検出対象が歩行者であると選択されるが、この場合には、横断歩道を渡る移動体は、基本的にすべて歩行者であり、自動車や自動二輪車などの車両が移動することはないと考えられるためである。
【0031】
また、同様に、車両検出部は、計測領域において移動体を抽出して、この移動体をパターン格納部13に格納された各サンプルパターンと比較するように構成されている。そして、歩行者検出部は、移動体がサンプルパターンと一致した場合には、移動体が車両であると判断して車両を検出するものであり、サンプルパターンと一致しない場合には、パターン生成部14により移動体を新たなサンプルパターンとして生成してパターン格納部13に格納するように構成されている。すなわち、歩行者信号機が赤に制御されている状態では、灯色情報に基づいて検出画像選択部により検出対象が車両であると選択されるが、この場合には、横断歩道を通過する移動体は、基本的にすべて車両であり、歩行者が移動することはないと考えられるためである。
【0032】
次に、本実施形態の作用について図5に示すフローチャートを参照して説明する。
【0033】
まず、本実施形態においては、カメラ4により撮影された画像は、画像入力部7を介して画像処理部9に入力されるとともに(ST1)、所定のメモリ8に記憶される。
【0034】
画像処理部9は、カメラ4から送られる画像のうち横断歩道2を自動的に検出し、横断歩道2に対応する計測領域を設定して(ST2)、画像処理部9により画像処理を開始する(ST3)。
【0035】
一方、検出対象選択部10は、信号制御装置6から送られる灯色情報に基づいて、歩行者用信号機3が青の場合は、検出すべき対象を歩行者とし、歩行者用信号機3が赤の場合は、検出すべき対象画像を車両とする(ST4)。
【0036】
そして、検出対象選択部10により、検出画像として歩行者が選択された場合は(ST5)、画像処理部9の歩行者検出部11により、カメラ4により撮影された画像の計測領域において、画像の各画素ごとにサーチすることにより、移動体を抽出して、この移動体をパターン格納部13に格納された各サンプルパターンと比較する。そして、歩行者検出部11は、移動体がサンプルパターンと一致した場合には(ST5:YES)、移動体が歩行者であると判断して歩行者を検出する(ST7)。一方、移動体がサンプルパターンと一致しない場合には(ST5:NO)、パターン生成部14により対象となる移動体を歩行者の新たなサンプルパターンとして生成し、パターン格納部13に格納する(ST6)。その後、歩行者の検出を行う(ST7)
【0037】
また、同様に、検出対象選択部10により、検出画像として車両が選択された場合は、画像処理部9の車両検出部12により、カメラ4により撮影された画像の計測領域において、画像の各画素ごとにサーチすることにより、移動体を抽出して、この移動体をパターン格納部13に格納された各サンプルパターンと比較する。そして、歩行者検出部11は、移動体がサンプルパターンと一致した場合には(ST8:YES)、移動体が車両であると判断して車両を検出する(ST10)。一方、移動体がサンプルパターンと一致しない場合には(ST8:YES)、パターン生成部14により対象となる移動体を車両の新たなサンプルパターンとして生成し、パターン格納部13に格納する(ST9)。その後、車両の検出を行う(ST10)
【0038】
この歩行者の検出結果または車両の検出結果は、信号制御装置6に出力され(ST11)、信号制御装置6は、歩行者または車両の有無に基づいて歩行者用信号機3の青色点灯あるいは点滅または赤色点灯などの点灯制御を行う。
【0039】
以上述べたように本実施形態においては、画像処理部9の歩行者検出部11または車両検出部12により、移動体がサンプルパターンと一致しない場合に、パターン生成部14により対象となる移動体を歩行者または車両の新たなサンプルパターンとして生成し、パターン格納部13に格納するようにしているので、実際にシステムを動作させることにより、新たなサンプルパターンを随時登録することができる。そのため、あらかじめサンプルパターンを登録しておく必要がなく、対象認識するシステムの設置を容易に行うことができる。
【0040】
さらに、画像処理部9により、カメラ4の設置位置に応じて、カメラ4から送られる画像のうち横断歩道2を自動的に検出し、横断歩道2に対応する計測領域をあらかじめ設定するようにしており、カメラ4による画像に基づいて逐次計測領域を手動で設定する必要がないので、カメラ4の設置作業が容易であり、かつ、システムの設定も容易となる。
【0041】
なお、前記実施形態においては、信号制御装置6からの灯色情報に基づいて、検出対象を歩行者であるか車両であるか選択するようにしたが、例えば、カメラ4による撮影画像に基づいて、横断歩道2を挟んで対向する歩行者用信号機3の点灯状態を検出することにより、画像処理部9により歩行者用信号機3が青であるか、赤であるかを判断するようにしてもよい。
【0042】
なお、前記実施形態においては、移動体のサンプルパターンとして歩行者および車両のサンプルパターンを生成するようにしたが、例えば、歩行者のみあるいは車両ののみのサンプルパターンを生成するようにしてもよい。
【0043】
また、本発明は前記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々の変形が可能である。
【符号の説明】
【0044】
1 道路
2 横断歩道
3 歩行者用信号機
4 カメラ
5 検出装置
6 信号制御装置
7 画像入力部
8 メモリ
9 画像処理部
10 検出対象選択部
11 歩行者検出部
12 車両検出部
13 パターン格納部
14 パターン生成部
【特許請求の範囲】
【請求項1】
横断歩道部分の画像を取得するためのカメラと、
前記信号機の点灯状態に基づいて検出対象を選択する検出対象選択部と、対象物のサンプルパターンを格納するためのパターン格納部と、前記カメラの画像から抽出された移動体と前記パターン格納部のサンプルパターンとを比較して移動体を検出する移動体検出部と、前記移動体検出部により抽出された移動体と前記サンプルパターンとが一致しない場合に、この抽出された移動体を新たなサンプルパターンとして生成するパターン生成部と、からなる画像処理部を備えた検出装置と、
を備えていることを特徴とする対象物認識システム。
【請求項2】
移動体検出部は、前記検出対象選択部により検出対象の移動体として歩行者が選択された場合に、前記カメラの画像から抽出された移動体と前記パターン格納部のサンプルパターンとを比較して歩行者を検出する歩行者検出部であり、前記パターン生成部は、前記歩行者検出部により抽出された移動体と前記サンプルパターンとが一致しない場合に、この抽出された移動体を歩行者の新たなサンプルパターンとして生成することを特徴とする請求項1に記載の対象物認識システム。
【請求項3】
移動体検出部は、前記検出対象選択部により検出対象の移動体として車両が選択された場合に、前記カメラの画像から抽出された移動体と前記パターン格納部のサンプルパターンとを比較して車両を検出する車両検出部であり、前記パターン生成部は、前記車両検出部により抽出された移動体と前記サンプルパターンとが一致しない場合に、この抽出された移動体を車両の新たなサンプルパターンとして生成することを特徴とする請求項1または請求項2に記載の対象物認識システム。
【請求項4】
前記検出対象選択部は、前記信号制御装置から送られる灯色情報に基づいて前記信号機の点灯状態を検出して検出対象を選択することを特徴とする請求項1から請求項3のいずれか一項に記載の対象物認識システム。
【請求項5】
前記検出対象選択部は、前記カメラの画像に基づいて前記信号機の点灯状態を検出して検出対象を選択することを特徴とする請求項1から請求項3のいずれか一項に記載の対象物認識システム。
【請求項6】
前記検出装置は、前記カメラから送られる画像から横断歩道を自動的に検出し、横断歩道に対応する計測領域をあらかじめ設定するものであることを特徴とする請求項1から請求項5のいずれか一項に記載の対象物認識システム。
【請求項1】
横断歩道部分の画像を取得するためのカメラと、
前記信号機の点灯状態に基づいて検出対象を選択する検出対象選択部と、対象物のサンプルパターンを格納するためのパターン格納部と、前記カメラの画像から抽出された移動体と前記パターン格納部のサンプルパターンとを比較して移動体を検出する移動体検出部と、前記移動体検出部により抽出された移動体と前記サンプルパターンとが一致しない場合に、この抽出された移動体を新たなサンプルパターンとして生成するパターン生成部と、からなる画像処理部を備えた検出装置と、
を備えていることを特徴とする対象物認識システム。
【請求項2】
移動体検出部は、前記検出対象選択部により検出対象の移動体として歩行者が選択された場合に、前記カメラの画像から抽出された移動体と前記パターン格納部のサンプルパターンとを比較して歩行者を検出する歩行者検出部であり、前記パターン生成部は、前記歩行者検出部により抽出された移動体と前記サンプルパターンとが一致しない場合に、この抽出された移動体を歩行者の新たなサンプルパターンとして生成することを特徴とする請求項1に記載の対象物認識システム。
【請求項3】
移動体検出部は、前記検出対象選択部により検出対象の移動体として車両が選択された場合に、前記カメラの画像から抽出された移動体と前記パターン格納部のサンプルパターンとを比較して車両を検出する車両検出部であり、前記パターン生成部は、前記車両検出部により抽出された移動体と前記サンプルパターンとが一致しない場合に、この抽出された移動体を車両の新たなサンプルパターンとして生成することを特徴とする請求項1または請求項2に記載の対象物認識システム。
【請求項4】
前記検出対象選択部は、前記信号制御装置から送られる灯色情報に基づいて前記信号機の点灯状態を検出して検出対象を選択することを特徴とする請求項1から請求項3のいずれか一項に記載の対象物認識システム。
【請求項5】
前記検出対象選択部は、前記カメラの画像に基づいて前記信号機の点灯状態を検出して検出対象を選択することを特徴とする請求項1から請求項3のいずれか一項に記載の対象物認識システム。
【請求項6】
前記検出装置は、前記カメラから送られる画像から横断歩道を自動的に検出し、横断歩道に対応する計測領域をあらかじめ設定するものであることを特徴とする請求項1から請求項5のいずれか一項に記載の対象物認識システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−221271(P2012−221271A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−86952(P2011−86952)
【出願日】平成23年4月11日(2011.4.11)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月11日(2011.4.11)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]