
対象物識別方法と装置
【課題】対象物が太陽に直接照らされていても、対象物が遠くに位置していても、対象物を撮像して得た画像において、対象物の位置を識別できるようにする。
【解決手段】第1の波長域の光を吸収し、かつ、第2の波長域の光を反射する光学特性部3を、対象物1に取り付ける。第1の波長域の光を第1撮像部5aに入射させ、かつ、第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収する第1光学系6と、第2の波長域の光を第2撮像部5bに入射させる第2光学系8と、を用意する。第1撮像部5aにより、第1光学系6を介して、対象物1を含む領域を撮像して第1画像を生成するとともに、第2撮像部5bにより、第2光学系8を介して、対象物1を含む領域を撮像して第2画像を生成する。第1画像の各画素の輝度Aと、対応する第2画像の画素の輝度Bとの比率B/Aを求め、この比率に基づいて、光学特性部3の位置を特定する。
【解決手段】第1の波長域の光を吸収し、かつ、第2の波長域の光を反射する光学特性部3を、対象物1に取り付ける。第1の波長域の光を第1撮像部5aに入射させ、かつ、第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収する第1光学系6と、第2の波長域の光を第2撮像部5bに入射させる第2光学系8と、を用意する。第1撮像部5aにより、第1光学系6を介して、対象物1を含む領域を撮像して第1画像を生成するとともに、第2撮像部5bにより、第2光学系8を介して、対象物1を含む領域を撮像して第2画像を生成する。第1画像の各画素の輝度Aと、対応する第2画像の画素の輝度Bとの比率B/Aを求め、この比率に基づいて、光学特性部3の位置を特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、対象物を含む領域を撮像して得た画像内において対象物の位置を識別する対象物識別方法と装置に関する。
【背景技術】
【0002】
屋外のように変化に富んだ多様性のある環境において、例えばロボットが作業をする時に、ロボットが対象物の位置や方向を検出する必要がある場合がある。
【0003】
その具体例を説明する。複数のロボットが、広範囲のエリアを分担して農作業や地雷撤去などの作業を行うことがある。この場合に、各ロボットは、他のロボットにより作業が済んだ範囲で作業を行わないようにする目的で、または、他のロボットとの衝突を避ける目的で、互いの位置関係を知る必要がある。
そのために、各ロボットは、他のロボットに取り付けられたマーカを検出することにより、他のロボットの位置や方向を検出することができる。
【0004】
別の具体例を説明する。搬送ロボットが、荷物を持った状態で、人に追従して移動する自動制御を行うことにより、人の移動先まで荷物を搬送ロボットに搬送させることがある。この場合には、搬送ロボットは、人を対象物として、人の位置や方向を検出する必要がある。
そのために、搬送ロボットは、人に取り付けられたマーカを検出することにより、人の位置や方向を検出することができる。
【0005】
対象物に取り付けるマーカは、例えば、下記の特許文献1〜3に記載されている。
【0006】
特許文献1に記載されたマーカは、特定のパターンで輝度が変化する発光ダイオードである。このマーカを用いる場合、マーカが取り付けられた対象物を含む領域を撮像して得た画像から、発光ダイオードの発光パターンで輝度が変化する画素を特定する。特定した画素に基づいて、対象物の位置や方向を検出することができる。
【0007】
特許文献2に記載されたマーカは、直線や四角形や円弧などの幾何学的模様である。このマーカを用いる場合、マーカが取り付けられた対象物を含む領域を撮像して得た画像において、マーカの幾何学的模様の位置を識別する。この位置に基づいて、対象物の位置や方向を検出することができる。
【0008】
特許文献3に記載されたマーカは、複数の特徴的な幾何学的模様である。このマーカを用いる場合、マーカが取り付けられた対象物を含む領域を撮像して得た画像において、マーカの一部が他の物体に隠れていても、または、画像の背景部分に似た模様があっても、各幾何学的模様を、その既知の模様と照合することにより、マーカにおける一部の幾何学的模様の位置を識別することができる。この位置に基づいて、対象物の位置や方向を検出することができる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2009−33366号公報
【特許文献2】特開2007−3233号公報
【特許文献3】特開2011−28417号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
特許文献1の場合には、屋外において、太陽に直接照らされている発光ダイオードを撮像すると、発光ダイオードの光が太陽光により検出できなくなる可能性がある。従って、発光ダイオードの光に基づいて、対象物の位置や方向を検出できなくなる。
【0011】
特許文献2、3の場合には、幾何学的模様を認識するには、幾何学的模様の縦または横の寸法が、画像において、十数の画素以上になる必要がある。
しかし、幾何学的模様を、100m以上の距離から、60度以上の視野で撮像した場合には、100万画素程度のカメラを用いても0.5m程度の幾何学的模様では、画像において、幾何学的模様の縦または横の寸法が、5画素程度以下になってしまう。その結果、幾何学的模様を認識できなくなる。従って、幾何学的模様に基づいて、対象物の位置や方向を検出できなくなる。
【0012】
そこで、本発明の目的は、対象物が太陽に直接照らされていても、対象物が遠くに位置していても、対象物を撮像して得た画像において、対象物の位置を識別できるようにすることにある。
【課題を解決するための手段】
【0013】
上記目的を達成するため、本発明によると、対象物を含む領域を撮像して得た画像内において対象物の位置を識別する対象物識別方法であって、
(A)紫外線または赤外線に含まれる光の波長域を第1の波長域とし、可視光線に含まれる光の波長域を第2の波長域として、第1の波長域の光を吸収し、かつ、第2の波長域の光を反射する光学特性部を、対象物に取り付け、
(B)対象物を含む領域を撮像する第1撮像部と第2撮像部を用意し、
(C)第1光学系と第2光学系を用意し、第1光学系は、前記領域から進行してきた第1の波長域の光を第1撮像部に入射させ、かつ、前記領域から進行してきた第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収し、第2光学系は、前記領域から進行してきた第2の波長域の光を第2撮像部に入射させ、
(D)第1撮像部により、第1光学系を介して、前記領域を撮像して第1画像を生成するとともに、第2撮像部により、第2光学系を介して、前記領域を撮像して第2画像を生成し、
(E)第1画像の各画素について、該画素の輝度をAとし、前記領域において該画素と同じ位置に相当する第2画像の画素の輝度をBとし、輝度Aに対する輝度Bの比率B/Aを求め、
(F)前記比率に基づいて、第1画像または第2画像における前記光学特性部の位置を特定する、ことを特徴とする対象物識別方法が提供される。
【0014】
好ましい例では、第1の波長域は、近赤外線の波長域であり、第2の波長域は、赤色光の波長域である。
【0015】
好ましい別の例では、第1の波長域は、長波長紫外線の波長域であり、第2の波長域は、青色光の波長域である。
【0016】
本発明の好ましい実施形態によると、前記(D)を、複数の時間帯で行う場合に、
各時間帯毎に、入射光の波長による入射光の反射率の変動量が許容値以下となる特定反射部を含む領域を、第1撮像部により、第1光学系を介して撮像して第1試験画像を生成するとともに、当該領域を、第2撮像部により、第2光学系を介して撮像して第2試験画像を生成し、
前記各時間帯について、第1試験画像における特定反射部の画素の輝度をaとし、第2試験画像における特定反射部の画素の輝度をbとして、輝度aに対する輝度bの比率の逆数a/bを補正係数として求め、
前記(F)では、前記比率B/Aを求めるのに用いた第1画像および第2画像を撮像した時間帯に対応する補正係数a/bを、当該比率に乗算することにより補正比率aB/bAを求めるとともに、第1画像または第2画像において、当該補正比率がしきい値以上となる画素の位置を、前記光学特性部の位置として特定する。
【0017】
本発明の別の実施形態によると、前記(D)において、第1画像または第2画像において、前記比率B/Aが、しきい値以上となる画素の位置を、前記光学特性部の位置として特定する。
【0018】
また、上記目的を達成するため、本発明によると、対象物を含む領域を撮像して得た画像内において対象物の位置を識別する対象物識別装置であって、
光学特性部が取り付けられた対象物を含む領域を撮像する撮像装置と、
撮像された画像における光学特性部の位置を特定する画像処理装置と、を備え、
光学特性部は、第1の波長域の光を吸収し、第2の波長域の光を反射し、第1の波長域は、紫外線または赤外線に含まれる光の波長域であり、第2の波長域は、可視光線に含まれる光の波長域であり、
撮像装置は、
第1光学系を介して、前記領域を撮像して第1画像を生成する第1撮像部と、
第2光学系を介して、前記領域を撮像して第2画像を生成する第2撮像部と、を有し、
第1光学系は、前記領域から進行してきた第1の波長域の光を第1撮像部に入射させ、かつ、前記領域から進行してきた第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収し、第2光学系は、前記領域から進行してきた第2の波長域の光を第2撮像部に入射させ、
画像処理装置は、
第1画像の各画素について、該画素の輝度をAとし、前記領域において該画素と同じ位置に相当する第2画像の画素の輝度をBとし、輝度Aに対する輝度Bの比率B/Aを求め、
前記比率に基づいて、第1画像または第2画像における前記光学特性部の位置を特定する、ことを特徴とする対象物識別装置が提供される。
【発明の効果】
【0019】
上述した本発明によると、光学特性部は、第1の波長域の光を吸収し、第2の波長域の光を反射する。
これに対し、第1光学系により、第1の撮像部には、第1の波長域の光は入射可能であるが、第2の波長域の光は、第1の撮像部への入射が阻止される。従って、第1撮像部による第1画像において、光学特性部の位置に相当する画素の輝度Aは小さくなる。
一方、第2光学系により、第2の撮像部には、第2の波長域の光は入射可能である。従って、第2撮像部による第2画像において、光学特性部の位置に相当する画素の輝度Bは大きくなる。
よって、光学特性部の位置については、比率B/Aが大きくなる。
【0020】
そこで、前記比率B/Aに基づいて、第1画像または第2画像における前記光学特性部の位置を特定することができる。
【0021】
しかも、前記比率に関して、例えば地球上の自然界には、可視光線(第2の波長域の光)の反射率が紫外線または赤外線(第1の波長域の光)の反射率よりも大幅に大きい物体はほとんど無いと考えられる。
これに対し、光学特性部は、紫外線または赤外線に含まれる光を吸収し、可視光線に含まれる光を反射するので、光学特性部では、可視光線の反射率が紫外線または赤外線の反射率よりも大幅に大きくなる。従って、前記比率B/Aにより、光学特性部を、自然界の物体と区別して認識できる。
【0022】
また、前記比率は、太陽に直接照らされている位置についてのものであっても、そうでない位置についてのものであってもあまり変化しない。従って、太陽に直接照らされている領域に対象物が存在していても、上述の比率により、光学特性部の位置を、他の位置と区別して検出できる。
【0023】
さらに、画像において、光学特性部の縦または横の寸法が1画素または数画素の寸法であっても、上述の比率により、光学特性部の位置を、他の位置と区別して検出できる。
【0024】
よって、本発明により、太陽に直接照らされている領域に対象物が存在していても、遠い距離からでも、対象物を識別することができる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施形態による対象物識別装置の構成図である。
【図2】光学特性部の構成例を示す。
【図3】本発明の実施形態による対象物識別方法を示すフローチャートである。
【図4】植物と砂利と土について、光の波長に対する光の反射率を示すグラフである。
【図5】対象物識別装置の別の構成例を示す。
【図6】対象物識別装置のさらに別の構成例を示す。
【発明を実施するための形態】
【0026】
本発明の好ましい実施形態を図面に基づいて説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0027】
[第1実施形態]
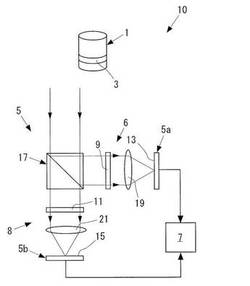
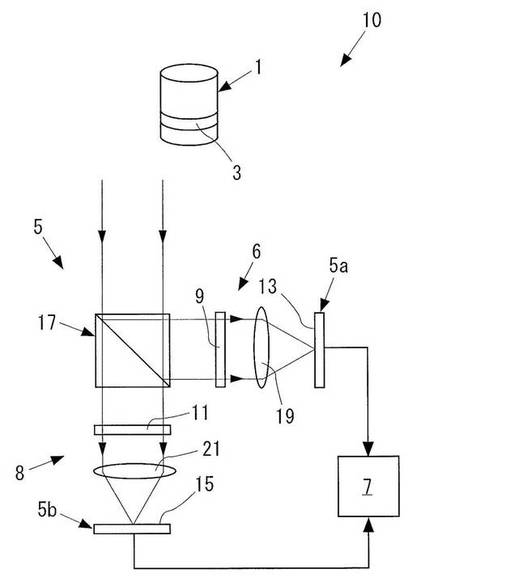
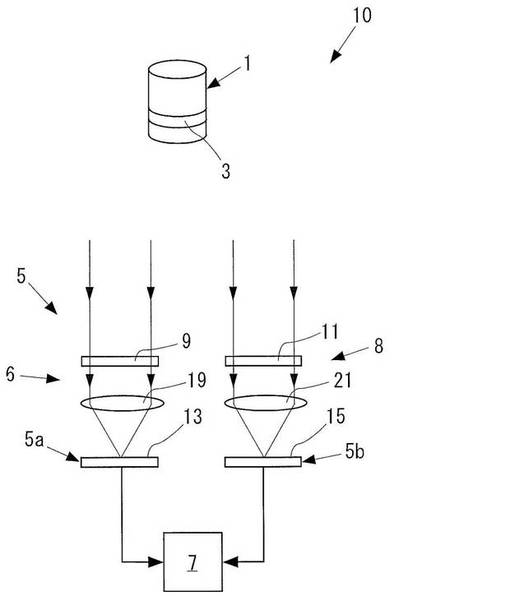
図1は、本発明の第1実施形態による対象物識別装置10の構成図である。対象物識別装置10は、対象物1を含む領域を撮像して得た画像内において対象物1の位置を識別する。対象物識別装置10は、光学特性部3と撮像装置5と画像処理装置7とを備える。
【0028】
光学特性部3は、対象物1に取り付けられる。光学特性部3は、第1の波長域の光を吸収し、第2の波長域の光を反射する。対象物1は、例えば、移動ロボットである。
第1の波長域は、紫外線または赤外線に含まれる光の波長域であり、第2の波長域は、可視光線に含まれる光の波長域である。
好ましい例では、第1の波長域は、近赤外線の波長域であり、第2の波長域は、赤色光の波長域である。
別の好ましい例では、第1の波長域は、紫外線に含まれる光の波長域であり、第2の波長域は、青色光の波長域である。この場合、より好ましくは、「紫外線に含まれる光」は、「長波長紫外線(UV−A)」であるのがよい。
【0029】
なお、本願において、各光と波長域の関係は次の通りである。
紫外線の波長域:10nm〜400nm
長波長紫外線の波長域:320nm〜400nm
可視光線の波長域:400nm〜700nm
青色の波長域:400nm〜500nm
緑色の波長域:500nm〜600nm
赤色の波長域:600nm〜700nm
赤外線の波長域:700nm〜1mm
近赤外線の波長域:700nm〜1400nm
【0030】
本願において、第1の波長域の光を、入射させる、反射させる、吸収する、透過させるとは、それぞれ、第1の波長域の全部または一部の光を、入射させる、反射させる、吸収する、透過させることを意味する。同様に、本願において、第2の波長域の光を、入射させる、反らす、反射させる、吸収する、透過させるとは、それぞれ、第2の波長域の全部または一部の光を、入射させる、反らす、反射させる、吸収する、透過させることを意味する。ここで、好ましくは、第1および第2の波長域の一部とは、30nm以上の幅を有する範囲である。
【0031】
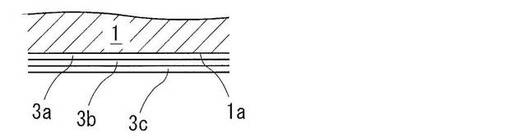
光学特性部3は、図2に示すように、対象物1の外表面1aに取り付けられた反射層3aと吸収層3bと反射防止フィルム3cとにより構成されてよい。図2の例では、反射層3aは、対象物1の外表面1aに取り付けられ、少なくとも第2の波長域の光を反射する。この反射率は、高い値であるのが好ましく、例えば、90%以上であるのがよい。反射層3aは、例えば、白色のものであるのがよい。吸収層3bは、反射層3aの外表面に取り付けられ、第1の波長域の光を吸収する。この吸収率は、高い値であるのが好ましく、例えば、90%以上であるのがよい。反射防止フィルム3cは、吸収層3bの外表面に取り付けられ、外光を、反射することなく吸収層3bへ入射させる機能を有する。
【0032】
このような光学特性部3へ入射した外光(特に太陽光)は、反射防止フィルム3cを通過して吸収層3bへ入射する。当該入射光のうち、吸収層3bで第1の波長域の光が吸収され、第2の波長域の光は、吸収層3bを透過して反射層3aに入射し、反射層3aで反射する。このように反射した第2の波長域の光は、再び、吸収層3bと反射防止フィルム3cを通過して、光学特性部3の外部へ進行していく。
なお、対象物1が、鉛直軸回りに1周する外周面を有する場合には、この外周面を1周するように光学特性部3を当該外周面に取り付けるのがよい。
【0033】
第1の波長域が近赤外線の波長域(700nm〜1400nm)であり、第2の波長域が赤色光の波長域(600nm〜700nm)である場合には、吸収層3bは、例えば、700nm〜850nmの範囲内の境界波長(例えば、700nm)より大きい波長を持つ光を吸収し、当該境界波長以下の波長を持つ光を透過させるショートパスフィルタであってよい。
一方、第1の波長域が紫外線に含まれる光の波長域(例えば、長波長紫外線の波長域:320nm〜400nm)であり、第2の波長域が青色光の波長域(400nm〜500nm)である場合には、吸収層3bは、350nm〜400nmの範囲内の境界波長(例えば、400nm)より小さい波長を持つ光を吸収し、当該境界波長以上の波長を持つ光を透過させるロングパスフィルタであってよい。
【0034】
撮像装置5は、第1光学系6と第2光学系8を有する。第1光学系6は、対象物1を含む撮像範囲となる領域から進行してきた第1の波長域の光を第1撮像部5aに入射させ、かつ、当該領域から進行してきた第2の波長域の光を、第1撮像部5a以外の位置へ反らし、または、吸収する。第2光学系8は、前記領域から進行してきた第2の波長域の光を第2撮像部5bに入射させる。
第1実施形態では、第1光学系6は、第1フィルタ9と後述のビームスプリッタ17とレンズ19とからなり、第2光学系8は、第2フィルタ11と後述するビームスプリッタ17とレンズ21とからなる。第1フィルタ9は、第1の波長域の光を透過させ、かつ、第2の波長域の光を透過させない。第2フィルタ11は、第2の波長域の光を透過させ、かつ、第1の波長域の光を透過させない。ただし、第2フィルタ11は、第2の波長域の光と、他の波長域の光を透過させてもよい。
【0035】
第1の波長域が近赤外線の波長域(700nm〜1400nm)であり、第2の波長域が赤色光の波長域(600nm〜700nm)である場合には、例えば、第1フィルタ9は、例えば、700nm〜850nmの範囲内の境界波長(例えば、700nm)より大きい波長を持つ光を透過させ、当該境界波長以下の波長を持つ光を反射するロングパスフィルタであってよく、第2フィルタ11は、赤色光のみを透過させるバンドパスフィルタであってよい。代わりに、第1フィルタ9は、近赤外線の波長域内の他の範囲の光を透過させるように形成されてもよい。
一方、第1の波長域が紫外線に含まれる光の波長域(例えば、長波長紫外線の波長域:320nm〜400nm)であり、第2の波長域が、青色光の波長域(400nm〜500nm)である場合には、第1フィルタ9は、例えば、350nm〜400nmの範囲内の境界波長(例えば、400nm)より小さい波長を持つ光を透過させ、当該境界波長以上の波長を持つ光を反射するショートパスフィルタであってよく、第2フィルタ11は、青色光のみを透過させるバンドパスフィルタであってよい。
【0036】
撮像装置5は、第1光学系6(第1フィルタ9)を介して、対象物1を含む領域を撮像して第1画像を生成する第1撮像部5aと、第2光学系8(第2フィルタ11)を介して、対象物1を含む領域を撮像して第2画像を生成する第2撮像部5bと、を有する。第1撮像部5aは、対象物1を含む領域からの光を第1フィルタ9を介して受ける撮像面13を有する。この撮像面13には、多数のCCD受光素子が2次元状に配列されている。第1撮像部5aは、受けた光に応じた第1画像(この例では、2次元画像)を生成する。第2撮像部5bは、対象物1を含む領域からの光を第2フィルタ11を介して受ける撮像面15を有する。この撮像面15には、多数のCCD受光素子が2次元状に配列されている。第2撮像部5bは、受けた光に応じた第2画像(この例では、2次元画像)を生成する。
【0037】
図1では、上述のビームスプリッタ17は、対象物を含む領域である撮像範囲からの光の一部を、第1撮像部5aの撮像面13へ向けて反射させ、撮像範囲からの光の一部を、第2撮像部5bの撮像面15へ向けて透過させる。好ましくは、ビームスプリッタ17は、ハーフミラーである。ハーフミラー17へ入射した光のうち、ハーフミラー17で撮像面13側へ反射する光と、撮像面15側へハーフミラー17を透過する光とは、その強さが同じになる。
【0038】
なお、撮像装置5は、第1撮像部5aの撮像面13または第2撮像部5bの撮像面15に、撮像範囲における所望の部分を結像させるレンズ(例えば、図1のレンズ19、21や図示しないレンズ)を有する。これについて、第1光学系6と第2光学系8は、レンズ19、21以外の他のレンズを有していてよい。
【0039】
画像処理装置7は、撮像装置5により撮像された画像における光学特性部3の位置を特定する。
【0040】
画像処理装置7は、第1画像の各画素に対する、撮像範囲において該画素と同じ位置となる第2画素の輝度比率を求める。すなわち、第1画像の各画素について、該画素の輝度(明るさ)をAとし、撮像範囲である前記領域において該画素と同じ位置に相当する第2画像の画素の輝度をBとして、画像処理装置7は、輝度Aに対する輝度Bの比率B/Aを求める。
【0041】
また、画像処理装置7は、比率B/Aに基づいて、第1画像または第2画像における光学特性部3の位置を特定する。ここでは、画像処理装置7は、第1画像または第2画像において、比率B/Aが第1のしきい値以上となる画素の位置を、第1画像または第2画像における光学特性部3の位置として特定する。
【0042】
なお、第1撮像部5aにより生成される第1画像と、第2撮像部5bにより生成される第2画像との間に、光差により撮像範囲の位置と倍率のずれが生じる場合には、画像処理装置7は、適宜の手段を用いて、第1画像の各画素を、撮像範囲において該画素と同じ位置に相当する第2画像の画素に対応付ける。
【0043】
図3は、本発明の第1実施形態による対象物識別方法を示すフローチャートである。この方法は、上述した対象物識別装置10を用いて行われる。
【0044】
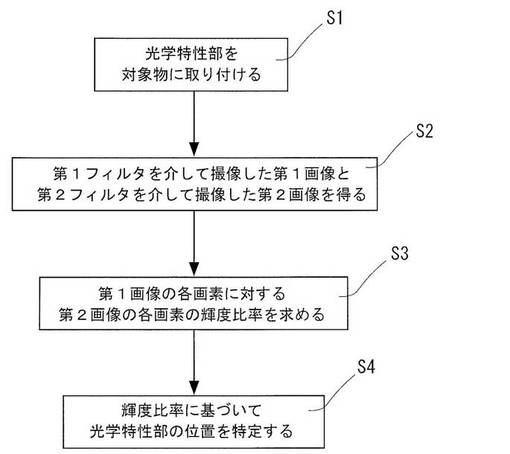
ステップS1において、上述した光学特性部3を、対象物1に予め取り付けておく。
【0045】
ステップS2において、第1撮像部5aにより、第1光学系6(第1フィルタ9)を介して、対象物1を含む領域を撮像して第1画像を生成するとともに、第2撮像部5bにより、第2光学系8(第2フィルタ11)を介して、対象物1を含む領域を撮像して第2画像を生成する。
【0046】
ステップS3において、画像処理装置7により、第1画像の各画素について、該画素の輝度Aに対する、撮像範囲である前記領域において該画素と同じ位置に相当する第2画像における画素の輝度Bの比率B/Aを求める。
【0047】
ステップS4において、画像処理装置7により、第1画像または第2画像において、前記比率B/Aに基づいて、第1画像または第2画像における光学特性部3の位置を特定する。ここでは、画像処理装置7により、第1画像または第2画像において、比率B/Aが第1のしきい値以上となる画素の位置を、第1画像または第2画像における光学特性部3の位置として特定する。
【0048】
上述した本発明の第1実施形態によると、以下の作用効果が得られる。
【0049】
光学特性部3は、第1の波長域の光を吸収し、第2の波長域の光を反射する。
これに対し、第1光学系6により、第1の撮像部5aには、第1の波長域の光は入射可能であるが、第2の波長域の光は、第1の撮像部5aへの入射が阻止される。従って、第1撮像部5aによる第1画像において、光学特性部3の位置に相当する画素の輝度Aは小さくなる。
一方、第2光学系8により、第2の撮像部5bには、第2の波長域の光は入射可能である。従って、第2撮像部5bによる第2画像において、光学特性部3の位置に相当する画素の輝度Bは大きくなる。
よって、光学特性部3の位置については、比率B/Aが大きくなる。
【0050】
そこで、前記比率B/Aに基づいて、第1画像または第2画像における光学特性部3の位置を特定することができる。
【0051】
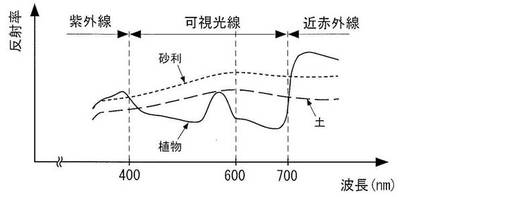
しかも、比率B/Aに関して、地球上の自然界には、可視光線(第2の波長域の光)の反射率が紫外線または赤外線(第1の波長域の光)の反射率よりも大幅に大きい物体はほとんど無いと考えられる。例えば、図4に示すように、植物や砂利や土では、可視光線の反射率が紫外線または赤外線の反射率よりも大幅に大きくなることはない。
これに対し、光学特性部3は、紫外線または赤外線に含まれる光を吸収し、可視光線に含まれる光を反射するので、光学特性部3では、可視光線の反射率が紫外線または赤外線の反射率よりも大幅に大きくなる。従って、前記比率B/Aにより、光学特性部3を、自然界の物体と区別して認識できる。
【0052】
特に、第1の波長域が、近赤外線の波長域であり、第2の波長域が、赤色光の波長域であるである場合について、太陽に直接照らされている自然界の物体と身近な人工物について、近赤外線と赤色光の反射率を調査した。この調査結果を、下記の[表1]に示す。
【0053】
【表1】

【0054】
[表1]において、反射率比は、赤色光の反射率に対する近赤外線の反射率の比率である。
調査によると、[表1]に示すように、自然界の物体と身近な人工物には、赤色光の反射率が近赤外線の反射率より大きくなるものが存在しなかった。
従って、第1の波長域を近赤外線の波長域とし、第2の波長域を赤色光の波長域とすることにより、ステップS3で得た比率B/Aにより、光学特性部3を、自然界の物体と区別して認識できる。この場合、例えば、上述した比率B/Aが、一般的な物体では、1以下となる。[表1]の物体では、比率B/Aが、1/9.1以上1/1.1以下となる。そのため、上述した第1のしきい値を例えば4にすることにより、光学特性部3に相当する画素を特定することができる。
【0055】
一方、第1の波長域が、紫外線に含まれる光の波長域であり、第2の波長域が、青色光の波長域である場合では、例えば、上述した比率B/Aが、一般的な物体では、大きくても2以下となる。図4に示す物体について、比率B/Aが、植物では1/2以下となり、土と砂利では、1〜2程度になる。そのため、上述した第1のしきい値を例えば4にすることにより、光学特性部3に相当する画素を特定することができる。
【0056】
さらに、前記比率は、太陽に直接照らされている位置についてのものであっても、そうでない位置についてのものであってもあまり変化しない。例えば、このような日照条件による一般的な物体に相当する画素の前記比率は20〜40%程度だけしか変化しない。これは、例えば、光学特性部3に相当する画素の前記比率の値が10程度になることに比べて小さい。従って、対象物1が、太陽に直接照らされている範囲に存在していても、影になっている暗い範囲に存在していても、上述の比率により、光学特性部3の位置を、他の位置と区別して検出できる。
【0057】
また、画像において、光学特性部3の縦または横の寸法が1画素または数画素の寸法であっても、光学特性部3の位置を、他の位置と区別して検出できる。よって、遠い距離からでも、対象物1を識別することができる。
【0058】
[第2実施形態]
次に、本発明の第2実施形態による対象物識別装置10と対象物識別方法を説明する。第2実施形態において、以下で説明しない点は、上述の第1実施形態と同じであってよい。
【0059】
太陽光のスペクトルは、地球の地表において、朝、昼、夕方などの時間帯によって変化する。そのため、撮像範囲内の同じ位置に対応する上述の比率B/Aが、時間帯によって変化するので、これに応じて、上述した第1のしきい値も変化させるのが好ましい。
ただし、この例では、第1のしきい値を変化させる代わりに、上述の比率B/Aを補正係数により補正して、第1のしきい値の代わりに、異なる時間帯に対して同じ値の第2のしきい値を使用する。
【0060】
補正係数を、各時間帯毎に(例えば、朝、昼、夕方の各々について)、次のように予め求めておく。
入射光の波長による入射光の反射率の変動量が許容値以下となる部分を、特定反射部とする。
まず、各時間帯毎に、第1撮像部5aにより、特定反射部を含む領域を、第1光学系6(第1フィルタ9)を介して撮像して第1試験画像を生成するとともに、第2撮像部5bにより、当該領域を、第2光学系8(第2フィルタ11)を介して撮像して第2試験画像を生成する。
次に、前記各時間帯について、第1試験画像における特定反射部の画素の輝度をaとし、第2試験画像における特定反射部の画素の輝度をbとして、画像処理装置7により、輝度aに対する輝度bの比率の逆数a/bを補正係数として求める。
特定反射部の光の反射率は、第1の波長域と第2の波長域を含む連続した波長範囲内にある入射光の各波長に対して、10%程度以下の割合で変動することが好ましい。例えば、特定反射部の光の反射率は、第1の波長域と第2の波長域を含む連続した波長範囲内にある入射光の各波長に対して、0.8〜0.9の範囲内の値をとって、ほぼ一定となることが好ましい。そのため、特定反射部は、例えば、白い部分であることが好ましい(すなわち、特定反射部は、白に見える部分であることが好ましい)。
【0061】
このように求めた補正係数は、次のようにステップS4で用いる。
ステップS4において、ステップS3で比率B/Aを求めるのに用いた第1画像および第2画像を撮像した時間帯に対応する補正係数a/bを、当該比率B/Aに乗算することにより補正比率aB/bAを求める。次いで、ステップS4において、第1画像または第2画像において、前記補正比率が第2のしきい値以上となる画素の位置を、第1画像または第2画像における光学特性部3の位置として特定する。
【0062】
第2実施形態によると、太陽光のスペクトルが、地球の地表において、朝、昼、夕方などの時間帯によって変化しても、上述の補正係数を用いることにより、光学特性部3の位置を高精度に検出することができる。
また、第2実施形態でも、第1実施形態と同様の作用効果が得られる。
【0063】
本発明は上述した第1実施形態または第2実施形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更を加え得ることは勿論である。例えば、以下の変更例1〜5を任意に組み合わせて採用してもよいし、または、以下の変更例1〜5のいずれかを単独で採用してもよい。この場合、以下で説明しない点は上述の第1実施形態または第2実施形態と同じであってよい。
【0064】
(変更例1)
第2のフィルタ11を省略してもよい。この場合、第2光学系8は、レンズ21やその他の光学部品を有する。この場合、第2撮像部5bの撮像範囲となる領域からのすべての光を用いて第2画像または第2試験画像を生成してもよい。
【0065】
(変更例2)
第1試験画像と第2試験画像は、それぞれ、第1画像と第2画像であってもよい。すなわち、補正係数は、次のように、ステップS2で得られる第1画像と第2画像から求めてもよい。
ステップS2において、第1撮像部5aが、第1光学系6を介して撮像する前記領域と、第2撮像部5bが、第2光学系8を介して撮像する前記領域とに、前記特定反射部が含まれている。この特定反射部は、例えば、第1撮像部5aと第2撮像部5bの撮像範囲に含まれるように、撮像装置5の本体に固定しておく。なお、撮像装置5の本体には、第1撮像部5a、第2撮像部5b、第1光学系6、第2光学系8などの撮像装置5の構成部品が設置または固定されている。
【0066】
(変更例3)
図5は、対象物識別装置10の別の構成例を示す。図5の例では、上述のビームスプリッタ17が省略され、第1光学系6は、上述の第1フィルタ9とレンズ19により構成され、第2光学系8は、上述の第2フィルタ11とレンズ21により構成される。第1撮像部5aと第2撮像部5bとは、同じ方向を向くように配置される。画像処理装置7は、第1撮像部5aにより生成される第1画像と、第2撮像部5bにより生成される第2画像との間の撮像範囲のずれを、適宜の手段を用いて補正して、第1画像の各画素を、撮像範囲において該画素と同じ位置に相当する第2画像の画素に対応付ける。
【0067】
(変更例4)
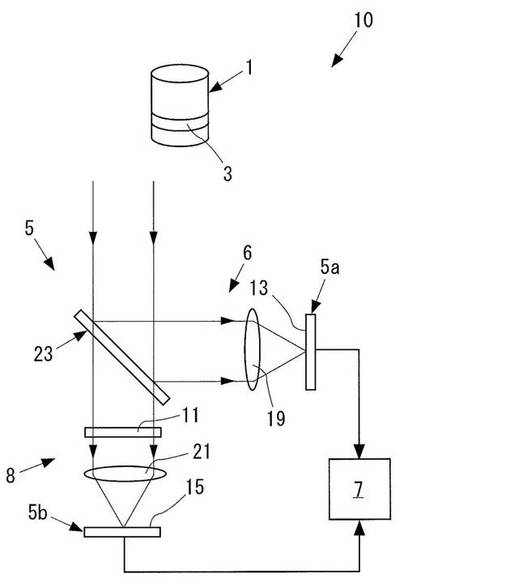
図6は、対象物識別装置10のさらに別の構成例を示す。図6では、第1光学系6は、ダイクロックミラー23とレンズ19により構成され、第2光学系8は、ダイクロックミラー23と第2フィルタ11とレンズ21により構成される。対象物1を含む領域である撮像範囲からの光のうち、第1の波長域の光は、ダイクロックミラー23により、第1撮像部5aの撮像面13へ向けて反射され、可視光線(好ましくは、可視光線のみ)は、第2撮像部5bの撮像面15へ向けてダイクロックミラー23を透過する。なお、図6において、第2フィルタ11を省略してもよい。
【0068】
(変更例5)
上述した図1または図5において、第1フィルタ9と第2フィルタ11の一方または両方をダイクロックミラーで置き換えてもよい。この場合、第1フィルタ9と置き換えられたダイクロックミラーは、入射してくる第1の波長域の光を、撮像面13に向けて透過させ、かつ、入射してくる第1の波長域の光以外の光を、撮像面13、15以外の方向(例えば、当該ダイクロックミラーへの当該光の入射方向と逆方向)へ反射させ、第2フィルタ11と置き換えられたダイクロックミラーは、入射してくる第2の波長域の光を、撮像面15に向けて透過させ、かつ、入射してくる第2の波長域の光以外の光を、撮像面13、15以外の方向(例えば、当該ダイクロックミラーへの当該光の入射方向と逆方向)へ反射させる。
【符号の説明】
【0069】
1 対象物、1a 対象物の外表面、3 光学特性部、3a 反射層、3b 吸収層、3c 反射防止フィルム、5 撮像装置、5a 第1撮像部、5b 第2撮像部、6 第1光学系、7 画像処理装置、8 第2光学系、9 第1フィルタ、10 対象物識別装置、11 第2フィルタ、13 第1撮像部の撮像面、15 第2撮像部の撮像面、17 ビームスプリッタ(ハーフミラー)、19、21 レンズ、23 ダイクロックミラー
【技術分野】
【0001】
本発明は、対象物を含む領域を撮像して得た画像内において対象物の位置を識別する対象物識別方法と装置に関する。
【背景技術】
【0002】
屋外のように変化に富んだ多様性のある環境において、例えばロボットが作業をする時に、ロボットが対象物の位置や方向を検出する必要がある場合がある。
【0003】
その具体例を説明する。複数のロボットが、広範囲のエリアを分担して農作業や地雷撤去などの作業を行うことがある。この場合に、各ロボットは、他のロボットにより作業が済んだ範囲で作業を行わないようにする目的で、または、他のロボットとの衝突を避ける目的で、互いの位置関係を知る必要がある。
そのために、各ロボットは、他のロボットに取り付けられたマーカを検出することにより、他のロボットの位置や方向を検出することができる。
【0004】
別の具体例を説明する。搬送ロボットが、荷物を持った状態で、人に追従して移動する自動制御を行うことにより、人の移動先まで荷物を搬送ロボットに搬送させることがある。この場合には、搬送ロボットは、人を対象物として、人の位置や方向を検出する必要がある。
そのために、搬送ロボットは、人に取り付けられたマーカを検出することにより、人の位置や方向を検出することができる。
【0005】
対象物に取り付けるマーカは、例えば、下記の特許文献1〜3に記載されている。
【0006】
特許文献1に記載されたマーカは、特定のパターンで輝度が変化する発光ダイオードである。このマーカを用いる場合、マーカが取り付けられた対象物を含む領域を撮像して得た画像から、発光ダイオードの発光パターンで輝度が変化する画素を特定する。特定した画素に基づいて、対象物の位置や方向を検出することができる。
【0007】
特許文献2に記載されたマーカは、直線や四角形や円弧などの幾何学的模様である。このマーカを用いる場合、マーカが取り付けられた対象物を含む領域を撮像して得た画像において、マーカの幾何学的模様の位置を識別する。この位置に基づいて、対象物の位置や方向を検出することができる。
【0008】
特許文献3に記載されたマーカは、複数の特徴的な幾何学的模様である。このマーカを用いる場合、マーカが取り付けられた対象物を含む領域を撮像して得た画像において、マーカの一部が他の物体に隠れていても、または、画像の背景部分に似た模様があっても、各幾何学的模様を、その既知の模様と照合することにより、マーカにおける一部の幾何学的模様の位置を識別することができる。この位置に基づいて、対象物の位置や方向を検出することができる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2009−33366号公報
【特許文献2】特開2007−3233号公報
【特許文献3】特開2011−28417号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
特許文献1の場合には、屋外において、太陽に直接照らされている発光ダイオードを撮像すると、発光ダイオードの光が太陽光により検出できなくなる可能性がある。従って、発光ダイオードの光に基づいて、対象物の位置や方向を検出できなくなる。
【0011】
特許文献2、3の場合には、幾何学的模様を認識するには、幾何学的模様の縦または横の寸法が、画像において、十数の画素以上になる必要がある。
しかし、幾何学的模様を、100m以上の距離から、60度以上の視野で撮像した場合には、100万画素程度のカメラを用いても0.5m程度の幾何学的模様では、画像において、幾何学的模様の縦または横の寸法が、5画素程度以下になってしまう。その結果、幾何学的模様を認識できなくなる。従って、幾何学的模様に基づいて、対象物の位置や方向を検出できなくなる。
【0012】
そこで、本発明の目的は、対象物が太陽に直接照らされていても、対象物が遠くに位置していても、対象物を撮像して得た画像において、対象物の位置を識別できるようにすることにある。
【課題を解決するための手段】
【0013】
上記目的を達成するため、本発明によると、対象物を含む領域を撮像して得た画像内において対象物の位置を識別する対象物識別方法であって、
(A)紫外線または赤外線に含まれる光の波長域を第1の波長域とし、可視光線に含まれる光の波長域を第2の波長域として、第1の波長域の光を吸収し、かつ、第2の波長域の光を反射する光学特性部を、対象物に取り付け、
(B)対象物を含む領域を撮像する第1撮像部と第2撮像部を用意し、
(C)第1光学系と第2光学系を用意し、第1光学系は、前記領域から進行してきた第1の波長域の光を第1撮像部に入射させ、かつ、前記領域から進行してきた第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収し、第2光学系は、前記領域から進行してきた第2の波長域の光を第2撮像部に入射させ、
(D)第1撮像部により、第1光学系を介して、前記領域を撮像して第1画像を生成するとともに、第2撮像部により、第2光学系を介して、前記領域を撮像して第2画像を生成し、
(E)第1画像の各画素について、該画素の輝度をAとし、前記領域において該画素と同じ位置に相当する第2画像の画素の輝度をBとし、輝度Aに対する輝度Bの比率B/Aを求め、
(F)前記比率に基づいて、第1画像または第2画像における前記光学特性部の位置を特定する、ことを特徴とする対象物識別方法が提供される。
【0014】
好ましい例では、第1の波長域は、近赤外線の波長域であり、第2の波長域は、赤色光の波長域である。
【0015】
好ましい別の例では、第1の波長域は、長波長紫外線の波長域であり、第2の波長域は、青色光の波長域である。
【0016】
本発明の好ましい実施形態によると、前記(D)を、複数の時間帯で行う場合に、
各時間帯毎に、入射光の波長による入射光の反射率の変動量が許容値以下となる特定反射部を含む領域を、第1撮像部により、第1光学系を介して撮像して第1試験画像を生成するとともに、当該領域を、第2撮像部により、第2光学系を介して撮像して第2試験画像を生成し、
前記各時間帯について、第1試験画像における特定反射部の画素の輝度をaとし、第2試験画像における特定反射部の画素の輝度をbとして、輝度aに対する輝度bの比率の逆数a/bを補正係数として求め、
前記(F)では、前記比率B/Aを求めるのに用いた第1画像および第2画像を撮像した時間帯に対応する補正係数a/bを、当該比率に乗算することにより補正比率aB/bAを求めるとともに、第1画像または第2画像において、当該補正比率がしきい値以上となる画素の位置を、前記光学特性部の位置として特定する。
【0017】
本発明の別の実施形態によると、前記(D)において、第1画像または第2画像において、前記比率B/Aが、しきい値以上となる画素の位置を、前記光学特性部の位置として特定する。
【0018】
また、上記目的を達成するため、本発明によると、対象物を含む領域を撮像して得た画像内において対象物の位置を識別する対象物識別装置であって、
光学特性部が取り付けられた対象物を含む領域を撮像する撮像装置と、
撮像された画像における光学特性部の位置を特定する画像処理装置と、を備え、
光学特性部は、第1の波長域の光を吸収し、第2の波長域の光を反射し、第1の波長域は、紫外線または赤外線に含まれる光の波長域であり、第2の波長域は、可視光線に含まれる光の波長域であり、
撮像装置は、
第1光学系を介して、前記領域を撮像して第1画像を生成する第1撮像部と、
第2光学系を介して、前記領域を撮像して第2画像を生成する第2撮像部と、を有し、
第1光学系は、前記領域から進行してきた第1の波長域の光を第1撮像部に入射させ、かつ、前記領域から進行してきた第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収し、第2光学系は、前記領域から進行してきた第2の波長域の光を第2撮像部に入射させ、
画像処理装置は、
第1画像の各画素について、該画素の輝度をAとし、前記領域において該画素と同じ位置に相当する第2画像の画素の輝度をBとし、輝度Aに対する輝度Bの比率B/Aを求め、
前記比率に基づいて、第1画像または第2画像における前記光学特性部の位置を特定する、ことを特徴とする対象物識別装置が提供される。
【発明の効果】
【0019】
上述した本発明によると、光学特性部は、第1の波長域の光を吸収し、第2の波長域の光を反射する。
これに対し、第1光学系により、第1の撮像部には、第1の波長域の光は入射可能であるが、第2の波長域の光は、第1の撮像部への入射が阻止される。従って、第1撮像部による第1画像において、光学特性部の位置に相当する画素の輝度Aは小さくなる。
一方、第2光学系により、第2の撮像部には、第2の波長域の光は入射可能である。従って、第2撮像部による第2画像において、光学特性部の位置に相当する画素の輝度Bは大きくなる。
よって、光学特性部の位置については、比率B/Aが大きくなる。
【0020】
そこで、前記比率B/Aに基づいて、第1画像または第2画像における前記光学特性部の位置を特定することができる。
【0021】
しかも、前記比率に関して、例えば地球上の自然界には、可視光線(第2の波長域の光)の反射率が紫外線または赤外線(第1の波長域の光)の反射率よりも大幅に大きい物体はほとんど無いと考えられる。
これに対し、光学特性部は、紫外線または赤外線に含まれる光を吸収し、可視光線に含まれる光を反射するので、光学特性部では、可視光線の反射率が紫外線または赤外線の反射率よりも大幅に大きくなる。従って、前記比率B/Aにより、光学特性部を、自然界の物体と区別して認識できる。
【0022】
また、前記比率は、太陽に直接照らされている位置についてのものであっても、そうでない位置についてのものであってもあまり変化しない。従って、太陽に直接照らされている領域に対象物が存在していても、上述の比率により、光学特性部の位置を、他の位置と区別して検出できる。
【0023】
さらに、画像において、光学特性部の縦または横の寸法が1画素または数画素の寸法であっても、上述の比率により、光学特性部の位置を、他の位置と区別して検出できる。
【0024】
よって、本発明により、太陽に直接照らされている領域に対象物が存在していても、遠い距離からでも、対象物を識別することができる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施形態による対象物識別装置の構成図である。
【図2】光学特性部の構成例を示す。
【図3】本発明の実施形態による対象物識別方法を示すフローチャートである。
【図4】植物と砂利と土について、光の波長に対する光の反射率を示すグラフである。
【図5】対象物識別装置の別の構成例を示す。
【図6】対象物識別装置のさらに別の構成例を示す。
【発明を実施するための形態】
【0026】
本発明の好ましい実施形態を図面に基づいて説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0027】
[第1実施形態]
図1は、本発明の第1実施形態による対象物識別装置10の構成図である。対象物識別装置10は、対象物1を含む領域を撮像して得た画像内において対象物1の位置を識別する。対象物識別装置10は、光学特性部3と撮像装置5と画像処理装置7とを備える。
【0028】
光学特性部3は、対象物1に取り付けられる。光学特性部3は、第1の波長域の光を吸収し、第2の波長域の光を反射する。対象物1は、例えば、移動ロボットである。
第1の波長域は、紫外線または赤外線に含まれる光の波長域であり、第2の波長域は、可視光線に含まれる光の波長域である。
好ましい例では、第1の波長域は、近赤外線の波長域であり、第2の波長域は、赤色光の波長域である。
別の好ましい例では、第1の波長域は、紫外線に含まれる光の波長域であり、第2の波長域は、青色光の波長域である。この場合、より好ましくは、「紫外線に含まれる光」は、「長波長紫外線(UV−A)」であるのがよい。
【0029】
なお、本願において、各光と波長域の関係は次の通りである。
紫外線の波長域:10nm〜400nm
長波長紫外線の波長域:320nm〜400nm
可視光線の波長域:400nm〜700nm
青色の波長域:400nm〜500nm
緑色の波長域:500nm〜600nm
赤色の波長域:600nm〜700nm
赤外線の波長域:700nm〜1mm
近赤外線の波長域:700nm〜1400nm
【0030】
本願において、第1の波長域の光を、入射させる、反射させる、吸収する、透過させるとは、それぞれ、第1の波長域の全部または一部の光を、入射させる、反射させる、吸収する、透過させることを意味する。同様に、本願において、第2の波長域の光を、入射させる、反らす、反射させる、吸収する、透過させるとは、それぞれ、第2の波長域の全部または一部の光を、入射させる、反らす、反射させる、吸収する、透過させることを意味する。ここで、好ましくは、第1および第2の波長域の一部とは、30nm以上の幅を有する範囲である。
【0031】
光学特性部3は、図2に示すように、対象物1の外表面1aに取り付けられた反射層3aと吸収層3bと反射防止フィルム3cとにより構成されてよい。図2の例では、反射層3aは、対象物1の外表面1aに取り付けられ、少なくとも第2の波長域の光を反射する。この反射率は、高い値であるのが好ましく、例えば、90%以上であるのがよい。反射層3aは、例えば、白色のものであるのがよい。吸収層3bは、反射層3aの外表面に取り付けられ、第1の波長域の光を吸収する。この吸収率は、高い値であるのが好ましく、例えば、90%以上であるのがよい。反射防止フィルム3cは、吸収層3bの外表面に取り付けられ、外光を、反射することなく吸収層3bへ入射させる機能を有する。
【0032】
このような光学特性部3へ入射した外光(特に太陽光)は、反射防止フィルム3cを通過して吸収層3bへ入射する。当該入射光のうち、吸収層3bで第1の波長域の光が吸収され、第2の波長域の光は、吸収層3bを透過して反射層3aに入射し、反射層3aで反射する。このように反射した第2の波長域の光は、再び、吸収層3bと反射防止フィルム3cを通過して、光学特性部3の外部へ進行していく。
なお、対象物1が、鉛直軸回りに1周する外周面を有する場合には、この外周面を1周するように光学特性部3を当該外周面に取り付けるのがよい。
【0033】
第1の波長域が近赤外線の波長域(700nm〜1400nm)であり、第2の波長域が赤色光の波長域(600nm〜700nm)である場合には、吸収層3bは、例えば、700nm〜850nmの範囲内の境界波長(例えば、700nm)より大きい波長を持つ光を吸収し、当該境界波長以下の波長を持つ光を透過させるショートパスフィルタであってよい。
一方、第1の波長域が紫外線に含まれる光の波長域(例えば、長波長紫外線の波長域:320nm〜400nm)であり、第2の波長域が青色光の波長域(400nm〜500nm)である場合には、吸収層3bは、350nm〜400nmの範囲内の境界波長(例えば、400nm)より小さい波長を持つ光を吸収し、当該境界波長以上の波長を持つ光を透過させるロングパスフィルタであってよい。
【0034】
撮像装置5は、第1光学系6と第2光学系8を有する。第1光学系6は、対象物1を含む撮像範囲となる領域から進行してきた第1の波長域の光を第1撮像部5aに入射させ、かつ、当該領域から進行してきた第2の波長域の光を、第1撮像部5a以外の位置へ反らし、または、吸収する。第2光学系8は、前記領域から進行してきた第2の波長域の光を第2撮像部5bに入射させる。
第1実施形態では、第1光学系6は、第1フィルタ9と後述のビームスプリッタ17とレンズ19とからなり、第2光学系8は、第2フィルタ11と後述するビームスプリッタ17とレンズ21とからなる。第1フィルタ9は、第1の波長域の光を透過させ、かつ、第2の波長域の光を透過させない。第2フィルタ11は、第2の波長域の光を透過させ、かつ、第1の波長域の光を透過させない。ただし、第2フィルタ11は、第2の波長域の光と、他の波長域の光を透過させてもよい。
【0035】
第1の波長域が近赤外線の波長域(700nm〜1400nm)であり、第2の波長域が赤色光の波長域(600nm〜700nm)である場合には、例えば、第1フィルタ9は、例えば、700nm〜850nmの範囲内の境界波長(例えば、700nm)より大きい波長を持つ光を透過させ、当該境界波長以下の波長を持つ光を反射するロングパスフィルタであってよく、第2フィルタ11は、赤色光のみを透過させるバンドパスフィルタであってよい。代わりに、第1フィルタ9は、近赤外線の波長域内の他の範囲の光を透過させるように形成されてもよい。
一方、第1の波長域が紫外線に含まれる光の波長域(例えば、長波長紫外線の波長域:320nm〜400nm)であり、第2の波長域が、青色光の波長域(400nm〜500nm)である場合には、第1フィルタ9は、例えば、350nm〜400nmの範囲内の境界波長(例えば、400nm)より小さい波長を持つ光を透過させ、当該境界波長以上の波長を持つ光を反射するショートパスフィルタであってよく、第2フィルタ11は、青色光のみを透過させるバンドパスフィルタであってよい。
【0036】
撮像装置5は、第1光学系6(第1フィルタ9)を介して、対象物1を含む領域を撮像して第1画像を生成する第1撮像部5aと、第2光学系8(第2フィルタ11)を介して、対象物1を含む領域を撮像して第2画像を生成する第2撮像部5bと、を有する。第1撮像部5aは、対象物1を含む領域からの光を第1フィルタ9を介して受ける撮像面13を有する。この撮像面13には、多数のCCD受光素子が2次元状に配列されている。第1撮像部5aは、受けた光に応じた第1画像(この例では、2次元画像)を生成する。第2撮像部5bは、対象物1を含む領域からの光を第2フィルタ11を介して受ける撮像面15を有する。この撮像面15には、多数のCCD受光素子が2次元状に配列されている。第2撮像部5bは、受けた光に応じた第2画像(この例では、2次元画像)を生成する。
【0037】
図1では、上述のビームスプリッタ17は、対象物を含む領域である撮像範囲からの光の一部を、第1撮像部5aの撮像面13へ向けて反射させ、撮像範囲からの光の一部を、第2撮像部5bの撮像面15へ向けて透過させる。好ましくは、ビームスプリッタ17は、ハーフミラーである。ハーフミラー17へ入射した光のうち、ハーフミラー17で撮像面13側へ反射する光と、撮像面15側へハーフミラー17を透過する光とは、その強さが同じになる。
【0038】
なお、撮像装置5は、第1撮像部5aの撮像面13または第2撮像部5bの撮像面15に、撮像範囲における所望の部分を結像させるレンズ(例えば、図1のレンズ19、21や図示しないレンズ)を有する。これについて、第1光学系6と第2光学系8は、レンズ19、21以外の他のレンズを有していてよい。
【0039】
画像処理装置7は、撮像装置5により撮像された画像における光学特性部3の位置を特定する。
【0040】
画像処理装置7は、第1画像の各画素に対する、撮像範囲において該画素と同じ位置となる第2画素の輝度比率を求める。すなわち、第1画像の各画素について、該画素の輝度(明るさ)をAとし、撮像範囲である前記領域において該画素と同じ位置に相当する第2画像の画素の輝度をBとして、画像処理装置7は、輝度Aに対する輝度Bの比率B/Aを求める。
【0041】
また、画像処理装置7は、比率B/Aに基づいて、第1画像または第2画像における光学特性部3の位置を特定する。ここでは、画像処理装置7は、第1画像または第2画像において、比率B/Aが第1のしきい値以上となる画素の位置を、第1画像または第2画像における光学特性部3の位置として特定する。
【0042】
なお、第1撮像部5aにより生成される第1画像と、第2撮像部5bにより生成される第2画像との間に、光差により撮像範囲の位置と倍率のずれが生じる場合には、画像処理装置7は、適宜の手段を用いて、第1画像の各画素を、撮像範囲において該画素と同じ位置に相当する第2画像の画素に対応付ける。
【0043】
図3は、本発明の第1実施形態による対象物識別方法を示すフローチャートである。この方法は、上述した対象物識別装置10を用いて行われる。
【0044】
ステップS1において、上述した光学特性部3を、対象物1に予め取り付けておく。
【0045】
ステップS2において、第1撮像部5aにより、第1光学系6(第1フィルタ9)を介して、対象物1を含む領域を撮像して第1画像を生成するとともに、第2撮像部5bにより、第2光学系8(第2フィルタ11)を介して、対象物1を含む領域を撮像して第2画像を生成する。
【0046】
ステップS3において、画像処理装置7により、第1画像の各画素について、該画素の輝度Aに対する、撮像範囲である前記領域において該画素と同じ位置に相当する第2画像における画素の輝度Bの比率B/Aを求める。
【0047】
ステップS4において、画像処理装置7により、第1画像または第2画像において、前記比率B/Aに基づいて、第1画像または第2画像における光学特性部3の位置を特定する。ここでは、画像処理装置7により、第1画像または第2画像において、比率B/Aが第1のしきい値以上となる画素の位置を、第1画像または第2画像における光学特性部3の位置として特定する。
【0048】
上述した本発明の第1実施形態によると、以下の作用効果が得られる。
【0049】
光学特性部3は、第1の波長域の光を吸収し、第2の波長域の光を反射する。
これに対し、第1光学系6により、第1の撮像部5aには、第1の波長域の光は入射可能であるが、第2の波長域の光は、第1の撮像部5aへの入射が阻止される。従って、第1撮像部5aによる第1画像において、光学特性部3の位置に相当する画素の輝度Aは小さくなる。
一方、第2光学系8により、第2の撮像部5bには、第2の波長域の光は入射可能である。従って、第2撮像部5bによる第2画像において、光学特性部3の位置に相当する画素の輝度Bは大きくなる。
よって、光学特性部3の位置については、比率B/Aが大きくなる。
【0050】
そこで、前記比率B/Aに基づいて、第1画像または第2画像における光学特性部3の位置を特定することができる。
【0051】
しかも、比率B/Aに関して、地球上の自然界には、可視光線(第2の波長域の光)の反射率が紫外線または赤外線(第1の波長域の光)の反射率よりも大幅に大きい物体はほとんど無いと考えられる。例えば、図4に示すように、植物や砂利や土では、可視光線の反射率が紫外線または赤外線の反射率よりも大幅に大きくなることはない。
これに対し、光学特性部3は、紫外線または赤外線に含まれる光を吸収し、可視光線に含まれる光を反射するので、光学特性部3では、可視光線の反射率が紫外線または赤外線の反射率よりも大幅に大きくなる。従って、前記比率B/Aにより、光学特性部3を、自然界の物体と区別して認識できる。
【0052】
特に、第1の波長域が、近赤外線の波長域であり、第2の波長域が、赤色光の波長域であるである場合について、太陽に直接照らされている自然界の物体と身近な人工物について、近赤外線と赤色光の反射率を調査した。この調査結果を、下記の[表1]に示す。
【0053】
【表1】
【0054】
[表1]において、反射率比は、赤色光の反射率に対する近赤外線の反射率の比率である。
調査によると、[表1]に示すように、自然界の物体と身近な人工物には、赤色光の反射率が近赤外線の反射率より大きくなるものが存在しなかった。
従って、第1の波長域を近赤外線の波長域とし、第2の波長域を赤色光の波長域とすることにより、ステップS3で得た比率B/Aにより、光学特性部3を、自然界の物体と区別して認識できる。この場合、例えば、上述した比率B/Aが、一般的な物体では、1以下となる。[表1]の物体では、比率B/Aが、1/9.1以上1/1.1以下となる。そのため、上述した第1のしきい値を例えば4にすることにより、光学特性部3に相当する画素を特定することができる。
【0055】
一方、第1の波長域が、紫外線に含まれる光の波長域であり、第2の波長域が、青色光の波長域である場合では、例えば、上述した比率B/Aが、一般的な物体では、大きくても2以下となる。図4に示す物体について、比率B/Aが、植物では1/2以下となり、土と砂利では、1〜2程度になる。そのため、上述した第1のしきい値を例えば4にすることにより、光学特性部3に相当する画素を特定することができる。
【0056】
さらに、前記比率は、太陽に直接照らされている位置についてのものであっても、そうでない位置についてのものであってもあまり変化しない。例えば、このような日照条件による一般的な物体に相当する画素の前記比率は20〜40%程度だけしか変化しない。これは、例えば、光学特性部3に相当する画素の前記比率の値が10程度になることに比べて小さい。従って、対象物1が、太陽に直接照らされている範囲に存在していても、影になっている暗い範囲に存在していても、上述の比率により、光学特性部3の位置を、他の位置と区別して検出できる。
【0057】
また、画像において、光学特性部3の縦または横の寸法が1画素または数画素の寸法であっても、光学特性部3の位置を、他の位置と区別して検出できる。よって、遠い距離からでも、対象物1を識別することができる。
【0058】
[第2実施形態]
次に、本発明の第2実施形態による対象物識別装置10と対象物識別方法を説明する。第2実施形態において、以下で説明しない点は、上述の第1実施形態と同じであってよい。
【0059】
太陽光のスペクトルは、地球の地表において、朝、昼、夕方などの時間帯によって変化する。そのため、撮像範囲内の同じ位置に対応する上述の比率B/Aが、時間帯によって変化するので、これに応じて、上述した第1のしきい値も変化させるのが好ましい。
ただし、この例では、第1のしきい値を変化させる代わりに、上述の比率B/Aを補正係数により補正して、第1のしきい値の代わりに、異なる時間帯に対して同じ値の第2のしきい値を使用する。
【0060】
補正係数を、各時間帯毎に(例えば、朝、昼、夕方の各々について)、次のように予め求めておく。
入射光の波長による入射光の反射率の変動量が許容値以下となる部分を、特定反射部とする。
まず、各時間帯毎に、第1撮像部5aにより、特定反射部を含む領域を、第1光学系6(第1フィルタ9)を介して撮像して第1試験画像を生成するとともに、第2撮像部5bにより、当該領域を、第2光学系8(第2フィルタ11)を介して撮像して第2試験画像を生成する。
次に、前記各時間帯について、第1試験画像における特定反射部の画素の輝度をaとし、第2試験画像における特定反射部の画素の輝度をbとして、画像処理装置7により、輝度aに対する輝度bの比率の逆数a/bを補正係数として求める。
特定反射部の光の反射率は、第1の波長域と第2の波長域を含む連続した波長範囲内にある入射光の各波長に対して、10%程度以下の割合で変動することが好ましい。例えば、特定反射部の光の反射率は、第1の波長域と第2の波長域を含む連続した波長範囲内にある入射光の各波長に対して、0.8〜0.9の範囲内の値をとって、ほぼ一定となることが好ましい。そのため、特定反射部は、例えば、白い部分であることが好ましい(すなわち、特定反射部は、白に見える部分であることが好ましい)。
【0061】
このように求めた補正係数は、次のようにステップS4で用いる。
ステップS4において、ステップS3で比率B/Aを求めるのに用いた第1画像および第2画像を撮像した時間帯に対応する補正係数a/bを、当該比率B/Aに乗算することにより補正比率aB/bAを求める。次いで、ステップS4において、第1画像または第2画像において、前記補正比率が第2のしきい値以上となる画素の位置を、第1画像または第2画像における光学特性部3の位置として特定する。
【0062】
第2実施形態によると、太陽光のスペクトルが、地球の地表において、朝、昼、夕方などの時間帯によって変化しても、上述の補正係数を用いることにより、光学特性部3の位置を高精度に検出することができる。
また、第2実施形態でも、第1実施形態と同様の作用効果が得られる。
【0063】
本発明は上述した第1実施形態または第2実施形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更を加え得ることは勿論である。例えば、以下の変更例1〜5を任意に組み合わせて採用してもよいし、または、以下の変更例1〜5のいずれかを単独で採用してもよい。この場合、以下で説明しない点は上述の第1実施形態または第2実施形態と同じであってよい。
【0064】
(変更例1)
第2のフィルタ11を省略してもよい。この場合、第2光学系8は、レンズ21やその他の光学部品を有する。この場合、第2撮像部5bの撮像範囲となる領域からのすべての光を用いて第2画像または第2試験画像を生成してもよい。
【0065】
(変更例2)
第1試験画像と第2試験画像は、それぞれ、第1画像と第2画像であってもよい。すなわち、補正係数は、次のように、ステップS2で得られる第1画像と第2画像から求めてもよい。
ステップS2において、第1撮像部5aが、第1光学系6を介して撮像する前記領域と、第2撮像部5bが、第2光学系8を介して撮像する前記領域とに、前記特定反射部が含まれている。この特定反射部は、例えば、第1撮像部5aと第2撮像部5bの撮像範囲に含まれるように、撮像装置5の本体に固定しておく。なお、撮像装置5の本体には、第1撮像部5a、第2撮像部5b、第1光学系6、第2光学系8などの撮像装置5の構成部品が設置または固定されている。
【0066】
(変更例3)
図5は、対象物識別装置10の別の構成例を示す。図5の例では、上述のビームスプリッタ17が省略され、第1光学系6は、上述の第1フィルタ9とレンズ19により構成され、第2光学系8は、上述の第2フィルタ11とレンズ21により構成される。第1撮像部5aと第2撮像部5bとは、同じ方向を向くように配置される。画像処理装置7は、第1撮像部5aにより生成される第1画像と、第2撮像部5bにより生成される第2画像との間の撮像範囲のずれを、適宜の手段を用いて補正して、第1画像の各画素を、撮像範囲において該画素と同じ位置に相当する第2画像の画素に対応付ける。
【0067】
(変更例4)
図6は、対象物識別装置10のさらに別の構成例を示す。図6では、第1光学系6は、ダイクロックミラー23とレンズ19により構成され、第2光学系8は、ダイクロックミラー23と第2フィルタ11とレンズ21により構成される。対象物1を含む領域である撮像範囲からの光のうち、第1の波長域の光は、ダイクロックミラー23により、第1撮像部5aの撮像面13へ向けて反射され、可視光線(好ましくは、可視光線のみ)は、第2撮像部5bの撮像面15へ向けてダイクロックミラー23を透過する。なお、図6において、第2フィルタ11を省略してもよい。
【0068】
(変更例5)
上述した図1または図5において、第1フィルタ9と第2フィルタ11の一方または両方をダイクロックミラーで置き換えてもよい。この場合、第1フィルタ9と置き換えられたダイクロックミラーは、入射してくる第1の波長域の光を、撮像面13に向けて透過させ、かつ、入射してくる第1の波長域の光以外の光を、撮像面13、15以外の方向(例えば、当該ダイクロックミラーへの当該光の入射方向と逆方向)へ反射させ、第2フィルタ11と置き換えられたダイクロックミラーは、入射してくる第2の波長域の光を、撮像面15に向けて透過させ、かつ、入射してくる第2の波長域の光以外の光を、撮像面13、15以外の方向(例えば、当該ダイクロックミラーへの当該光の入射方向と逆方向)へ反射させる。
【符号の説明】
【0069】
1 対象物、1a 対象物の外表面、3 光学特性部、3a 反射層、3b 吸収層、3c 反射防止フィルム、5 撮像装置、5a 第1撮像部、5b 第2撮像部、6 第1光学系、7 画像処理装置、8 第2光学系、9 第1フィルタ、10 対象物識別装置、11 第2フィルタ、13 第1撮像部の撮像面、15 第2撮像部の撮像面、17 ビームスプリッタ(ハーフミラー)、19、21 レンズ、23 ダイクロックミラー
【特許請求の範囲】
【請求項1】
対象物を含む領域を撮像して得た画像内において対象物の位置を識別する対象物識別方法であって、
(A)紫外線または赤外線に含まれる光の波長域を第1の波長域とし、可視光線に含まれる光の波長域を第2の波長域として、第1の波長域の光を吸収し、かつ、第2の波長域の光を反射する光学特性部を、対象物に取り付け、
(B)対象物を含む領域を撮像する第1撮像部と第2撮像部を用意し、
(C)第1光学系と第2光学系を用意し、第1光学系は、前記領域から進行してきた第1の波長域の光を第1撮像部に入射させ、かつ、前記領域から進行してきた第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収し、第2光学系は、前記領域から進行してきた第2の波長域の光を第2撮像部に入射させ、
(D)第1撮像部により、第1光学系を介して、前記領域を撮像して第1画像を生成するとともに、第2撮像部により、第2光学系を介して、前記領域を撮像して第2画像を生成し、
(E)第1画像の各画素について、該画素の輝度をAとし、前記領域において該画素と同じ位置に相当する第2画像の画素の輝度をBとし、輝度Aに対する輝度Bの比率B/Aを求め、
(F)前記比率に基づいて、第1画像または第2画像における前記光学特性部の位置を特定する、ことを特徴とする対象物識別方法。
【請求項2】
第1の波長域は、近赤外線の波長域であり、第2の波長域は、赤色光の波長域である、ことを特徴とする請求項1に記載の対象物識別方法。
【請求項3】
第1の波長域は、長波長紫外線の波長域であり、第2の波長域は、青色光の波長域である、ことを特徴とする請求項1に記載の対象物識別方法。
【請求項4】
前記(D)を、複数の時間帯で行う場合に、
各時間帯毎に、入射光の波長による入射光の反射率の変動量が許容値以下となる特定反射部を含む領域を、第1撮像部により、第1光学系を介して撮像して第1試験画像を生成するとともに、当該領域を、第2撮像部により、第2光学系を介して撮像して第2試験画像を生成し、
前記各時間帯について、第1試験画像における特定反射部の画素の輝度をaとし、第2試験画像における特定反射部の画素の輝度をbとして、輝度aに対する輝度bの比率の逆数a/bを補正係数として求め、
前記(F)では、前記比率B/Aを求めるのに用いた第1画像および第2画像を撮像した時間帯に対応する補正係数a/bを、当該比率に乗算することにより補正比率aB/bAを求めるとともに、第1画像または第2画像において、当該補正比率がしきい値以上となる画素の位置を、前記光学特性部の位置として特定する、ことを特徴とする請求項1、2または3に記載の対象物識別方法。
【請求項5】
前記(F)では、第1画像または第2画像において、前記比率B/Aが、しきい値以上となる画素の位置を、前記光学特性部の位置として特定する、ことを特徴とする請求項1、2または3に記載の対象物識別方法。
【請求項6】
対象物を含む領域を撮像して得た画像内において対象物の位置を識別する対象物識別装置であって、
光学特性部が取り付けられた対象物を含む領域を撮像する撮像装置と、
撮像された画像における光学特性部の位置を特定する画像処理装置と、を備え、
光学特性部は、第1の波長域の光を吸収し、第2の波長域の光を反射し、第1の波長域は、紫外線または赤外線に含まれる光の波長域であり、第2の波長域は、可視光線に含まれる光の波長域であり、
撮像装置は、
第1光学系を介して、前記領域を撮像して第1画像を生成する第1撮像部と、
第2光学系を介して、前記領域を撮像して第2画像を生成する第2撮像部と、を有し、
第1光学系は、前記領域から進行してきた第1の波長域の光を第1撮像部に入射させ、かつ、前記領域から進行してきた第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収し、第2光学系は、前記領域から進行してきた第2の波長域の光を第2撮像部に入射させ、
画像処理装置は、
第1画像の各画素について、該画素の輝度をAとし、前記領域において該画素と同じ位置に相当する第2画像の画素の輝度をBとし、輝度Aに対する輝度Bの比率B/Aを求め、
前記比率に基づいて、第1画像または第2画像における前記光学特性部の位置を特定する、ことを特徴とする対象物識別装置。
【請求項1】
対象物を含む領域を撮像して得た画像内において対象物の位置を識別する対象物識別方法であって、
(A)紫外線または赤外線に含まれる光の波長域を第1の波長域とし、可視光線に含まれる光の波長域を第2の波長域として、第1の波長域の光を吸収し、かつ、第2の波長域の光を反射する光学特性部を、対象物に取り付け、
(B)対象物を含む領域を撮像する第1撮像部と第2撮像部を用意し、
(C)第1光学系と第2光学系を用意し、第1光学系は、前記領域から進行してきた第1の波長域の光を第1撮像部に入射させ、かつ、前記領域から進行してきた第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収し、第2光学系は、前記領域から進行してきた第2の波長域の光を第2撮像部に入射させ、
(D)第1撮像部により、第1光学系を介して、前記領域を撮像して第1画像を生成するとともに、第2撮像部により、第2光学系を介して、前記領域を撮像して第2画像を生成し、
(E)第1画像の各画素について、該画素の輝度をAとし、前記領域において該画素と同じ位置に相当する第2画像の画素の輝度をBとし、輝度Aに対する輝度Bの比率B/Aを求め、
(F)前記比率に基づいて、第1画像または第2画像における前記光学特性部の位置を特定する、ことを特徴とする対象物識別方法。
【請求項2】
第1の波長域は、近赤外線の波長域であり、第2の波長域は、赤色光の波長域である、ことを特徴とする請求項1に記載の対象物識別方法。
【請求項3】
第1の波長域は、長波長紫外線の波長域であり、第2の波長域は、青色光の波長域である、ことを特徴とする請求項1に記載の対象物識別方法。
【請求項4】
前記(D)を、複数の時間帯で行う場合に、
各時間帯毎に、入射光の波長による入射光の反射率の変動量が許容値以下となる特定反射部を含む領域を、第1撮像部により、第1光学系を介して撮像して第1試験画像を生成するとともに、当該領域を、第2撮像部により、第2光学系を介して撮像して第2試験画像を生成し、
前記各時間帯について、第1試験画像における特定反射部の画素の輝度をaとし、第2試験画像における特定反射部の画素の輝度をbとして、輝度aに対する輝度bの比率の逆数a/bを補正係数として求め、
前記(F)では、前記比率B/Aを求めるのに用いた第1画像および第2画像を撮像した時間帯に対応する補正係数a/bを、当該比率に乗算することにより補正比率aB/bAを求めるとともに、第1画像または第2画像において、当該補正比率がしきい値以上となる画素の位置を、前記光学特性部の位置として特定する、ことを特徴とする請求項1、2または3に記載の対象物識別方法。
【請求項5】
前記(F)では、第1画像または第2画像において、前記比率B/Aが、しきい値以上となる画素の位置を、前記光学特性部の位置として特定する、ことを特徴とする請求項1、2または3に記載の対象物識別方法。
【請求項6】
対象物を含む領域を撮像して得た画像内において対象物の位置を識別する対象物識別装置であって、
光学特性部が取り付けられた対象物を含む領域を撮像する撮像装置と、
撮像された画像における光学特性部の位置を特定する画像処理装置と、を備え、
光学特性部は、第1の波長域の光を吸収し、第2の波長域の光を反射し、第1の波長域は、紫外線または赤外線に含まれる光の波長域であり、第2の波長域は、可視光線に含まれる光の波長域であり、
撮像装置は、
第1光学系を介して、前記領域を撮像して第1画像を生成する第1撮像部と、
第2光学系を介して、前記領域を撮像して第2画像を生成する第2撮像部と、を有し、
第1光学系は、前記領域から進行してきた第1の波長域の光を第1撮像部に入射させ、かつ、前記領域から進行してきた第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収し、第2光学系は、前記領域から進行してきた第2の波長域の光を第2撮像部に入射させ、
画像処理装置は、
第1画像の各画素について、該画素の輝度をAとし、前記領域において該画素と同じ位置に相当する第2画像の画素の輝度をBとし、輝度Aに対する輝度Bの比率B/Aを求め、
前記比率に基づいて、第1画像または第2画像における前記光学特性部の位置を特定する、ことを特徴とする対象物識別装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−72666(P2013−72666A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−210089(P2011−210089)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]