
対麻痺者用立ち上がり・立位保持装具
【課題】車椅子に乗ったまま容易に脱着でき、歩行器等の簡便な器具を使用して楽に(少ない上腕力で)坐位から立位に或いは立位から坐位に移行できる対麻痺者用立ち上がり・立位保持装具を提供すること。
【解決手段】左右の大腿部を支持する大腿支持部1と、大腿支持部1に連設される大腿支持部材2と、左右の下腿部を支持する下腿支持部3と、下腿支持部3に連設される下腿支持部材4と、左右の足を支持する足支持部5と、大腿支持部材2と下腿支持部材4とを回動可能に結合する膝関節6と、下腿支持部材4と足支持部5とを回動可能に結合する足関節7と、膝関節6を屈伸させるアクチュエータ8と、膝関節6が伸展するのと連動して足関節7を底屈させる関節連動機構9と、を有することを特徴とする。
【解決手段】左右の大腿部を支持する大腿支持部1と、大腿支持部1に連設される大腿支持部材2と、左右の下腿部を支持する下腿支持部3と、下腿支持部3に連設される下腿支持部材4と、左右の足を支持する足支持部5と、大腿支持部材2と下腿支持部材4とを回動可能に結合する膝関節6と、下腿支持部材4と足支持部5とを回動可能に結合する足関節7と、膝関節6を屈伸させるアクチュエータ8と、膝関節6が伸展するのと連動して足関節7を底屈させる関節連動機構9と、を有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、特に、対麻痺者が着用して好適な下肢装具に関するものであり、詳しくは、着用者が坐位から立位へ或いは立位から坐位へ一人で移行できるようにした下肢装具に関するものである。
【背景技術】
【0002】
対麻痺者とは、下半身の運動機能を完全に喪失し、感覚神経も麻痺している重度の身体障害者のことであり、このような対麻痺者を立たせて歩かせるには、介護者が両側から支えなくてはならない。しかし、対麻痺者であっても、補助具等で下肢を重力に抗して支えておくことができれば、立位を保持することは勿論、松葉杖や歩行器具を使って歩行も可能である。
【0003】
このための補助具が下肢装具と呼ばれるものであり、ウオークアバウト(PolymMedics社 商品名)やARGO(HughSteeper社 商品名)等がある。
【0004】
また、膝関節を伸展或いは屈曲したときに支柱の回動が自動的にロックされる自動ロック式下肢装具も開発されている(例えば、特許文献1参照。)。
【特許文献1】特開2004−147726号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
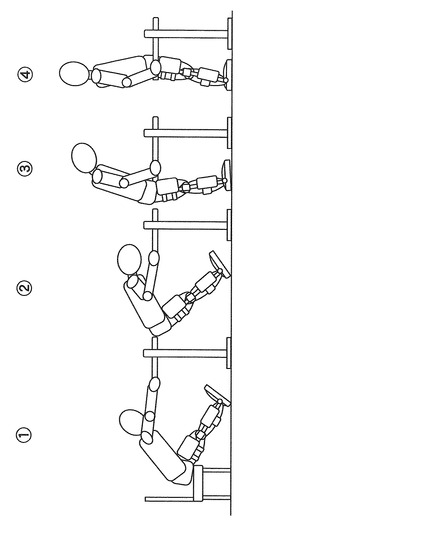
対麻痺者用歩行装具は、上記のように各種製作されているが、日常的に実用されているものは少ない。その一つの原因に、従来の装具は膝を伸展位でロックして立ち上がらなければならないため、立ち上がりは平行棒のような引っ張っても動かない器具がないとかなり困難である(図6参照。)。家庭で平行棒のような器具を備えることは日本の狭い住居環境を考えると不可能に近い。また、ARGOは、唯一膝屈曲位から立ち上がることができる装具であるが、立ち上がりにはかなりの習熟を要し、介助なしでの立ち上がりは難しい。
【0006】
本発明は、上記従来の下肢装具の問題に鑑みてなされたものであり、車椅子に乗ったまま或いは椅子に座ったまま容易に脱着でき、歩行器等の簡便な器具を使用して楽に(少ない上腕力で)坐位から立位に或いは立位から坐位に一人で且つ介助なしで移行でき、室内移動もできる対麻痺者用立ち上がり・立位保持装具を提供することを課題とする。
【課題を解決するための手段】
【0007】
発明者等は、家庭でも使用可能な折り畳み式の歩行器や杖を使って一人で容易に立ち上がることができれば、上記の問題を解決できると考え、移動機能を最小限にして立ち上がり機能に特化した装具を目指して鋭意研究を行った。発明者等は、健常者の立ち上がり動作を注意深く観察して次のような知見を得た。すなわち、健常者がゆっくり立ち上がるときは、まず、前方に体重を移し、臀部を椅子から浮かし、体の重心を足の中心に移動させて前後のバランスをとる。次に、バランスを保ったまま膝関節と股関節とを伸展させて立ち上がっている。そこで、健常者と同様な立ち上がり動作を可能にする下肢装具を考案すれば、歩行器或いは杖を使用して立ち上がることができると考えられ、本考案となった。
【0008】
上記の課題を解決するためになされた本発明の対麻痺者用立ち上がり・立位保持装具は、左右の大腿部を支持する大腿支持部と、前記大腿支持部に連設される大腿支持部材と、左右の下腿部を支持する下腿支持部と、前記下腿支持部に連設される下腿支持部材と、左右の足を支持する足支持部と、前記大腿支持部材と前記下腿支持部材とを回動可能に結合する膝関節と、 前記下腿支持部材と前記足支持部とを回動可能に結合する足関節と、前記膝関節を屈伸させるアクチュエータと、前記膝関節が伸展するのと連動して前記足関節を底屈させる関節連動機構と、を有することを特徴とする。
【0009】
また、上記対麻痺者用立ち上がり・立位保持装具において、前記膝関節を伸展させる方向に付勢する膝関節付勢手段を備えるとよい。
【0010】
また、上記対麻痺者用立ち上がり・立位保持装具において、前記下腿支持部材は、左右下腿の内側に配置される左右下腿支柱が上部と下部とで連結されてなるとよい。
【0011】
また、上記対麻痺者用立ち上がり・立位保持装具において、前記関節連動機構は、前記膝関節の軸を回動するプーリと、一端部が前記足支持部の後端に固定され他端部が前記プーリに巻回されている紐部材と、前記紐部材が巻回される方向に前記プーリの回転を付勢するプーリ付勢手段と、前記プーリの外側に固定され前記大腿支持部材と係合して前記プーリが前記巻回される方向と反対方向に回転するのを抑制する抑制手段と、を有しており、前記足関節が背屈されると前記プーリが前記紐部材に引っ張られて回転し、前記抑制手段が前記大腿支持部材と係合して前記プーリの回転が停止するものとするとよい。
【発明の効果】
【0012】
下腿支持部材と足支持部とを回動可能に結合する足関節を有しているので、対麻痺者は歩行器等に掴まり、膝関節を屈曲させた状態で椅子(坐位の位置)から臀部を浮かし前傾して足関節を背屈させ、体重心を足の上に移動させることができる。また、膝関節を屈伸させるアクチュエータと膝関節が伸展するのと連動して足関節を伸展させる関節連動機構とを有しているので、体重心を足の上に位置させながら足関節、膝関節及び股関節を同時に伸展させて容易に(小さな上腕力で)立位に至ることができる。
【0013】
膝関節を伸展させる方向に付勢する膝関節付勢手段を備えているので、推力の小さいアクチュエータでよく、装具の小型軽量化が図られる。
【0014】
下腿支持部材は、左右下腿の内側に配置される左右下腿支柱が上部と下部とで連結されているので、左右下腿の外側に配置される支柱がなくても装具の剛性が確保される。
【0015】
関節連動機構は、膝関節の軸を回動するプーリと、一端部が足支持部の後端に固定され他端部が前記プーリに巻回されている紐部材と、紐部材が巻回される方向にプーリの回転を付勢するプーリ付勢手段と、プーリの外側に固定され大腿支持部材と係合してプーリが巻回される方向と反対方向に回転するのを抑制する抑制手段と、を有しており、足関節が背屈されるとプーリが紐部材に引っ張られて回転し、抑制手段が大腿支持部材と係合してプーリの回転が停止するので、それ以上の足関節の背屈が不能になる。その状態からアクチュエータで膝関節を伸展してゆくと、大腿支持部材と抑制手段が係合したままプーリが紐部材を巻回する方向に回転し、紐部材を引っ張るので、足関節が底屈していく。したがって、健常者と同様な立ち上がり動作が可能になる。
【発明を実施するための最良の形態】
【0016】
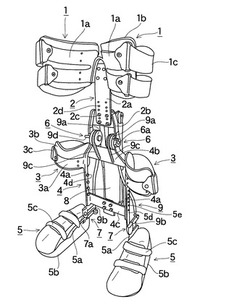
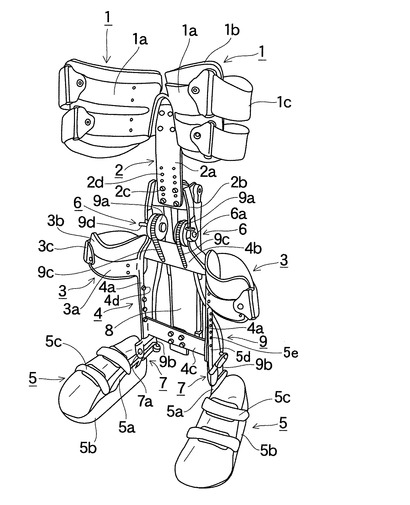
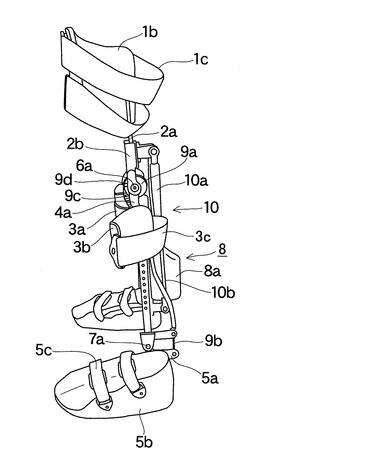
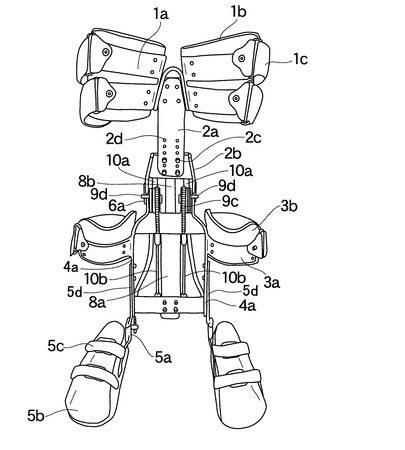
本発明の実施形態を図面を参照して詳しく説明する。図1、図2、図3は、それぞれ本発明に係る下肢麻痺者用下肢装具の斜視図、側面図、正面図である。図4は、本発明に係る装具を装着して坐位から立位に姿勢移動する様子を模式的に示す図である。図5は、図4の姿勢移動時の関節連動機構の動作を模式的に示す図である。
【0017】
本発明に係る対麻痺者用立ち上がり・立位保持装具は、図1〜図3に示すように、左右の大腿部を支持する大腿支持部1と、大腿支持部1に連設される大腿支持部材2と、左右の下腿部を支持する下腿支持部3と、下腿支持部3に連設される下腿支持部材4と、左右の足を支持する足支持部5と、大腿支持部材2と下腿支持部材4とを回動可能に結合する膝関節6と、下腿支持部材4と足支持部5とを回動可能に結合する足関節7と、膝関節6を屈伸させるアクチュエータ8と、膝関節6が伸展するのと連動して足関節7を伸展させる関節連動機構9と、を備えている。
【0018】
大腿支持部1は、大腿支持部材2に連設される例えば金属製の剛性体基部1aと、その内側に固定されたパッド材1bと、大腿固定ベルト1cと、を備えている。
【0019】
大腿支持部材2は、上端部に剛性体基部1aが連設される大腿支柱2aと、その下端部にネジ2cでネジ止めされた門型フレーム2bと、を備えている。大腿支柱2aには、門型フレーム2bをネジ止めするネジ孔2dが下端部から上方に複数形成されており、異なる下肢の長さに対応できるようになっている。
【0020】
下腿支持部3は、下腿支持部材4に連設される剛性体基部3aと、その内側に固定されたパッド3bと、下腿固定ベルト3cと、を備えている。
【0021】
下腿支持部材4は、左右下腿の内側に配置される左右下腿支柱4aの上部と下部とが連結板4bと4cとで連結されて構成されている。左右の下腿支柱4aの上部には、左右の下腿支持部3が連設されている。
【0022】
左右の下腿支柱4aの上端部と、大腿支持部材2の門型フレーム2bの下端部とは、膝関節軸6aで軸着されて膝関節6を構成している。
【0023】
足支持部5は、足の内側に沿うフレーム5aと、それに固定された足載せ部5bと、足固定ベルト5cと、下腿支柱4aと連結される足フレーム5dと、を備えている。左右下腿支柱4aと足フレーム5dとは複数のネジ4dでネジ止めされているが、ネジ孔5eが足フレーム5dに複数形成されており、異なる下肢の長さに対応できるようになっている。
【0024】
左右の下腿支柱4aの下端部と、足支持部5のフレーム5aとは、足関節軸7aで軸着されて足関節7を構成している。
【0025】
アクチュエータ8は、例えば、ボールネジ式のロッドアクチュエータ(THK社、モデルCRES500)で、本体8aとロッド8bとを備えている。ロッド8bの推力は、490Nである。ロッド8bは、図示しないリモコンスイッチで本体8aから出たり、本体8aに入ったりする。本体8aの下端部が下腿支柱4aの下部連結板4cに回転自在に取り付けられ、ロッド8bの先端部が大腿支持部材2の門型フレーム2bの上部に回転自在に取り付けられている。
【0026】
アクチュエータ8の両側には、膝関節6を伸展させる方向に付勢する膝関節付勢手段10が配置されている。膝関節付勢手段10は、例えば、ガススプリング(不二ラテックス社、モデルFGS−15−150)で、アウターチューブ10aと、ピストンロッド10bと、を備えている。ガス反力は、ガスチューブ1個で200N、2個で400Nである。アウターチューブ10aの上端部が大腿支持部材2の門型フレーム2bの上部に回転自在に取り付けられ、ピストンロッド10bの先端部が下腿支柱4aの下部連結板4cに回転自在に取り付けられている。
【0027】
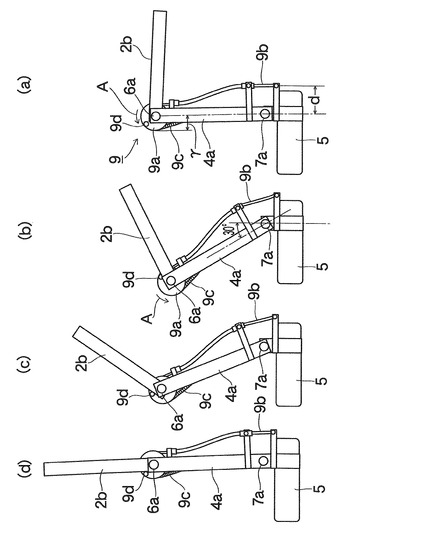
関節連動機構9は、図5に示すように、膝関節6のピン6aを回動するプーリ9aと、一端部が足支持部5のフレーム5aの後端に固定され他端部がプーリ9aに巻回されている紐部材9bと、紐部材9bが巻回される方向(矢印A方向)にプーリ9aの回転を付勢するプーリ付勢手段9cと、プーリ9aが前記矢印A方向と反対方向に回転するのを抑制する抑制手段9dと、を有している。
【0028】
紐部材9bは、例えば、スチールワイヤーであり、一端部が足支持部5のフレーム5aの後端に固定され他端部がプーリ9aに巻回されて固定されている。
【0029】
プーリ付勢手段9cは、例えば、引っ張りバネで、一端部がプーリ9aに巻回され、他端部が下腿支柱4aの上部連結板4bに固定されている。
【0030】
抑制手段9dは、プーリ9aの外周縁部から膝関節軸6aの軸方向且つ外向きに延びるロッドである。
【0031】
なお、プーリ9aの半径rと、足関節軸7aからワイヤー9bが固定される後端までの距離dとは、次式を満たすようにするとよい。
【0032】
r:d≒1:3 (1)
(1)式は、健常者が坐位から立位に移行する際の膝関節の角度と足関節の角度を測定した結果に基づくものである。rとdとが(1)式を満たすことで、後述するように、膝関節6は、足関節7の3倍の角度変化し、健常者と同じ動きをすることができる。
【0033】
以上の構成に基づき、主に図4及び5を参照して、一例として坐位(椅子に座った状態)から立位に移動する動作を説明する。
【0034】
先ず、椅子に座った状態で、図1〜3に示す下肢装具を手に取り、図示しないリモコンスイッチを操作してアクチュエータ8を駆動し、膝関節6を約90度に屈曲させ、図5(a)の状態にする。このとき、プーリ9aは、引っ張りバネ9cで矢印A方向に付勢されているので、回転しない。一方、ガススプリング10は、ピストンロッド10bがアウターチューブ10aに押し込まれ、ガス反力が蓄えられる。
【0035】
次に、左右の足を足支持部5に載せて、左右の大腿を大腿支持部1に、下腿を下腿支持部3に、それぞれベルト1c、3cで固定する。その後、足をベルト5cで足支持部5に固定する。
【0036】
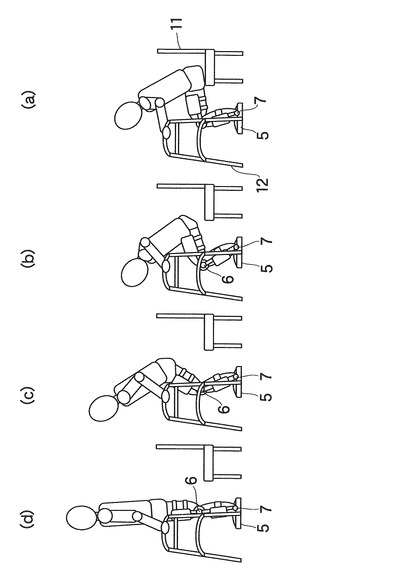
次に、図4(a)に示すように、椅子11に浅く座り、歩行器12に掴まりながら徐々に体重を前方に移動すると足関節7が背屈する。このとき、プーリ9aは、引っ張りバネ9cの付勢力に抗してワイヤー9bに引っ張られて矢印Aと逆方向に回転させられる。
【0037】
次に、図4(b)に示すように、椅子11から更に体重を前方に移動して臀部を浮かしながら、膝関節6を固定したまま、さらに足関節7を背屈すると、図5(b)に示すように、プーリ9aも連動して矢印Aと逆方向にさらに回転し、足関節7が約30度まで背屈したところでロッド9dが大腿支持部材2の門型フレーム2bに係合して、足関節7の背屈が停止する。このとき、体重心が足関節7の上に位置する。
【0038】
次に、図4(b)及び図5(b)の状態において、リモコンスイッチでアクチュエータ8を駆動して膝関節6を伸展させると、門型フレーム2bとロッド9dとの係合によりプーリ9aが矢印A方向に回転させられる。プーリ9aが矢印A方向に回転させられると、ワイヤー9bがプーリ9aに巻回され、足関節7が底屈させられ、図4(c)→図4(d)及び図5(c)→図5(d)になる。図4(d)及び図5(d)では、膝関節6が完全に伸展し、足関節7が完全に固定される。したがって、体重心を足の上に位置させながら足関節7、膝関節6及び股関節を同時に伸展させて容易に(小さな上腕力で)立位に至ることができる。
【0039】
なお、立位から坐位への移動は、上述の逆の動作になる。
【0040】
プーリ9aの半径rと、足関節軸7aからワイヤー9bが固定される後端までの距離dとは、(1)式を満たしているので、図4(b)→図4(c)→図4(d)及び図5(b)→図5(c)→図5(d)において、膝関節6と足関節7は、約3:1の比で連動して伸展運動をする。すなわち、膝関節6が90度から180度に伸展すると、足関節7が30度から0度に伸展する。したがって、膝関節6と足関節7とが健常者と同じように連動して伸展する。
【0041】
また、図4(b)→図4(c)→図4(d)及び図5(b)→図5(c)→図5(d)において、アクチュエータ8を駆動して膝関節6を伸展させる際、膝関節6を屈曲させた際に蓄えられたガススプリング10のガス反力も膝関節6の伸展に作用するので、アクチュエータ8を小型化することができる。
【0042】
また、本発明の装具では、アクチュエータ8とガススプリング10とをパラレルに使用しているため、従来のARGOや膝関節自動ロック式下肢装具のようなガススプリング単独使用と異なり、立ち上がり速度のコントロールができ、バランスを崩したときは、動作を停止または逆転可能であり、安全である。
【図面の簡単な説明】
【0043】
【図1】本発明の対麻痺者用立ち上がり・立位保持装具の斜視図である。
【図2】本発明の対麻痺者用立ち上がり・立位保持装具の側面図である。
【図3】本発明の対麻痺者用立ち上がり・立位保持装具の正面図である。
【図4】本発明の対麻痺者用立ち上がり・立位保持装具を装着して椅子に座った坐位から立位への動作を説明するための概略模式図である。
【図5】図4における膝関節と足関節の動作を説明するための概略模式図である。
【図6】従来の対麻痺者用下肢装具を装着して椅子に座った坐位から立位への動作を説明するための概略模式図である。
【符号の説明】
【0044】
1・・・・・・大腿支持部
2・・・・・・大腿支持部材
3・・・・・・下腿支持部
4・・・・・・下腿支持部材
4a・・・・・下腿支柱
5・・・・・・足支持部
6・・・・・・膝関節
7・・・・・・足関節
8・・・・・・アクチュエータ
9・・・・・・関節連動機構
9a・・・・・プーリ
9b・・・・・紐部材
9c・・・・・プーリ付勢手段
9d・・・・・抑制手段
10・・・・・・膝関節付勢手段
【技術分野】
【0001】
本発明は、特に、対麻痺者が着用して好適な下肢装具に関するものであり、詳しくは、着用者が坐位から立位へ或いは立位から坐位へ一人で移行できるようにした下肢装具に関するものである。
【背景技術】
【0002】
対麻痺者とは、下半身の運動機能を完全に喪失し、感覚神経も麻痺している重度の身体障害者のことであり、このような対麻痺者を立たせて歩かせるには、介護者が両側から支えなくてはならない。しかし、対麻痺者であっても、補助具等で下肢を重力に抗して支えておくことができれば、立位を保持することは勿論、松葉杖や歩行器具を使って歩行も可能である。
【0003】
このための補助具が下肢装具と呼ばれるものであり、ウオークアバウト(PolymMedics社 商品名)やARGO(HughSteeper社 商品名)等がある。
【0004】
また、膝関節を伸展或いは屈曲したときに支柱の回動が自動的にロックされる自動ロック式下肢装具も開発されている(例えば、特許文献1参照。)。
【特許文献1】特開2004−147726号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
対麻痺者用歩行装具は、上記のように各種製作されているが、日常的に実用されているものは少ない。その一つの原因に、従来の装具は膝を伸展位でロックして立ち上がらなければならないため、立ち上がりは平行棒のような引っ張っても動かない器具がないとかなり困難である(図6参照。)。家庭で平行棒のような器具を備えることは日本の狭い住居環境を考えると不可能に近い。また、ARGOは、唯一膝屈曲位から立ち上がることができる装具であるが、立ち上がりにはかなりの習熟を要し、介助なしでの立ち上がりは難しい。
【0006】
本発明は、上記従来の下肢装具の問題に鑑みてなされたものであり、車椅子に乗ったまま或いは椅子に座ったまま容易に脱着でき、歩行器等の簡便な器具を使用して楽に(少ない上腕力で)坐位から立位に或いは立位から坐位に一人で且つ介助なしで移行でき、室内移動もできる対麻痺者用立ち上がり・立位保持装具を提供することを課題とする。
【課題を解決するための手段】
【0007】
発明者等は、家庭でも使用可能な折り畳み式の歩行器や杖を使って一人で容易に立ち上がることができれば、上記の問題を解決できると考え、移動機能を最小限にして立ち上がり機能に特化した装具を目指して鋭意研究を行った。発明者等は、健常者の立ち上がり動作を注意深く観察して次のような知見を得た。すなわち、健常者がゆっくり立ち上がるときは、まず、前方に体重を移し、臀部を椅子から浮かし、体の重心を足の中心に移動させて前後のバランスをとる。次に、バランスを保ったまま膝関節と股関節とを伸展させて立ち上がっている。そこで、健常者と同様な立ち上がり動作を可能にする下肢装具を考案すれば、歩行器或いは杖を使用して立ち上がることができると考えられ、本考案となった。
【0008】
上記の課題を解決するためになされた本発明の対麻痺者用立ち上がり・立位保持装具は、左右の大腿部を支持する大腿支持部と、前記大腿支持部に連設される大腿支持部材と、左右の下腿部を支持する下腿支持部と、前記下腿支持部に連設される下腿支持部材と、左右の足を支持する足支持部と、前記大腿支持部材と前記下腿支持部材とを回動可能に結合する膝関節と、 前記下腿支持部材と前記足支持部とを回動可能に結合する足関節と、前記膝関節を屈伸させるアクチュエータと、前記膝関節が伸展するのと連動して前記足関節を底屈させる関節連動機構と、を有することを特徴とする。
【0009】
また、上記対麻痺者用立ち上がり・立位保持装具において、前記膝関節を伸展させる方向に付勢する膝関節付勢手段を備えるとよい。
【0010】
また、上記対麻痺者用立ち上がり・立位保持装具において、前記下腿支持部材は、左右下腿の内側に配置される左右下腿支柱が上部と下部とで連結されてなるとよい。
【0011】
また、上記対麻痺者用立ち上がり・立位保持装具において、前記関節連動機構は、前記膝関節の軸を回動するプーリと、一端部が前記足支持部の後端に固定され他端部が前記プーリに巻回されている紐部材と、前記紐部材が巻回される方向に前記プーリの回転を付勢するプーリ付勢手段と、前記プーリの外側に固定され前記大腿支持部材と係合して前記プーリが前記巻回される方向と反対方向に回転するのを抑制する抑制手段と、を有しており、前記足関節が背屈されると前記プーリが前記紐部材に引っ張られて回転し、前記抑制手段が前記大腿支持部材と係合して前記プーリの回転が停止するものとするとよい。
【発明の効果】
【0012】
下腿支持部材と足支持部とを回動可能に結合する足関節を有しているので、対麻痺者は歩行器等に掴まり、膝関節を屈曲させた状態で椅子(坐位の位置)から臀部を浮かし前傾して足関節を背屈させ、体重心を足の上に移動させることができる。また、膝関節を屈伸させるアクチュエータと膝関節が伸展するのと連動して足関節を伸展させる関節連動機構とを有しているので、体重心を足の上に位置させながら足関節、膝関節及び股関節を同時に伸展させて容易に(小さな上腕力で)立位に至ることができる。
【0013】
膝関節を伸展させる方向に付勢する膝関節付勢手段を備えているので、推力の小さいアクチュエータでよく、装具の小型軽量化が図られる。
【0014】
下腿支持部材は、左右下腿の内側に配置される左右下腿支柱が上部と下部とで連結されているので、左右下腿の外側に配置される支柱がなくても装具の剛性が確保される。
【0015】
関節連動機構は、膝関節の軸を回動するプーリと、一端部が足支持部の後端に固定され他端部が前記プーリに巻回されている紐部材と、紐部材が巻回される方向にプーリの回転を付勢するプーリ付勢手段と、プーリの外側に固定され大腿支持部材と係合してプーリが巻回される方向と反対方向に回転するのを抑制する抑制手段と、を有しており、足関節が背屈されるとプーリが紐部材に引っ張られて回転し、抑制手段が大腿支持部材と係合してプーリの回転が停止するので、それ以上の足関節の背屈が不能になる。その状態からアクチュエータで膝関節を伸展してゆくと、大腿支持部材と抑制手段が係合したままプーリが紐部材を巻回する方向に回転し、紐部材を引っ張るので、足関節が底屈していく。したがって、健常者と同様な立ち上がり動作が可能になる。
【発明を実施するための最良の形態】
【0016】
本発明の実施形態を図面を参照して詳しく説明する。図1、図2、図3は、それぞれ本発明に係る下肢麻痺者用下肢装具の斜視図、側面図、正面図である。図4は、本発明に係る装具を装着して坐位から立位に姿勢移動する様子を模式的に示す図である。図5は、図4の姿勢移動時の関節連動機構の動作を模式的に示す図である。
【0017】
本発明に係る対麻痺者用立ち上がり・立位保持装具は、図1〜図3に示すように、左右の大腿部を支持する大腿支持部1と、大腿支持部1に連設される大腿支持部材2と、左右の下腿部を支持する下腿支持部3と、下腿支持部3に連設される下腿支持部材4と、左右の足を支持する足支持部5と、大腿支持部材2と下腿支持部材4とを回動可能に結合する膝関節6と、下腿支持部材4と足支持部5とを回動可能に結合する足関節7と、膝関節6を屈伸させるアクチュエータ8と、膝関節6が伸展するのと連動して足関節7を伸展させる関節連動機構9と、を備えている。
【0018】
大腿支持部1は、大腿支持部材2に連設される例えば金属製の剛性体基部1aと、その内側に固定されたパッド材1bと、大腿固定ベルト1cと、を備えている。
【0019】
大腿支持部材2は、上端部に剛性体基部1aが連設される大腿支柱2aと、その下端部にネジ2cでネジ止めされた門型フレーム2bと、を備えている。大腿支柱2aには、門型フレーム2bをネジ止めするネジ孔2dが下端部から上方に複数形成されており、異なる下肢の長さに対応できるようになっている。
【0020】
下腿支持部3は、下腿支持部材4に連設される剛性体基部3aと、その内側に固定されたパッド3bと、下腿固定ベルト3cと、を備えている。
【0021】
下腿支持部材4は、左右下腿の内側に配置される左右下腿支柱4aの上部と下部とが連結板4bと4cとで連結されて構成されている。左右の下腿支柱4aの上部には、左右の下腿支持部3が連設されている。
【0022】
左右の下腿支柱4aの上端部と、大腿支持部材2の門型フレーム2bの下端部とは、膝関節軸6aで軸着されて膝関節6を構成している。
【0023】
足支持部5は、足の内側に沿うフレーム5aと、それに固定された足載せ部5bと、足固定ベルト5cと、下腿支柱4aと連結される足フレーム5dと、を備えている。左右下腿支柱4aと足フレーム5dとは複数のネジ4dでネジ止めされているが、ネジ孔5eが足フレーム5dに複数形成されており、異なる下肢の長さに対応できるようになっている。
【0024】
左右の下腿支柱4aの下端部と、足支持部5のフレーム5aとは、足関節軸7aで軸着されて足関節7を構成している。
【0025】
アクチュエータ8は、例えば、ボールネジ式のロッドアクチュエータ(THK社、モデルCRES500)で、本体8aとロッド8bとを備えている。ロッド8bの推力は、490Nである。ロッド8bは、図示しないリモコンスイッチで本体8aから出たり、本体8aに入ったりする。本体8aの下端部が下腿支柱4aの下部連結板4cに回転自在に取り付けられ、ロッド8bの先端部が大腿支持部材2の門型フレーム2bの上部に回転自在に取り付けられている。
【0026】
アクチュエータ8の両側には、膝関節6を伸展させる方向に付勢する膝関節付勢手段10が配置されている。膝関節付勢手段10は、例えば、ガススプリング(不二ラテックス社、モデルFGS−15−150)で、アウターチューブ10aと、ピストンロッド10bと、を備えている。ガス反力は、ガスチューブ1個で200N、2個で400Nである。アウターチューブ10aの上端部が大腿支持部材2の門型フレーム2bの上部に回転自在に取り付けられ、ピストンロッド10bの先端部が下腿支柱4aの下部連結板4cに回転自在に取り付けられている。
【0027】
関節連動機構9は、図5に示すように、膝関節6のピン6aを回動するプーリ9aと、一端部が足支持部5のフレーム5aの後端に固定され他端部がプーリ9aに巻回されている紐部材9bと、紐部材9bが巻回される方向(矢印A方向)にプーリ9aの回転を付勢するプーリ付勢手段9cと、プーリ9aが前記矢印A方向と反対方向に回転するのを抑制する抑制手段9dと、を有している。
【0028】
紐部材9bは、例えば、スチールワイヤーであり、一端部が足支持部5のフレーム5aの後端に固定され他端部がプーリ9aに巻回されて固定されている。
【0029】
プーリ付勢手段9cは、例えば、引っ張りバネで、一端部がプーリ9aに巻回され、他端部が下腿支柱4aの上部連結板4bに固定されている。
【0030】
抑制手段9dは、プーリ9aの外周縁部から膝関節軸6aの軸方向且つ外向きに延びるロッドである。
【0031】
なお、プーリ9aの半径rと、足関節軸7aからワイヤー9bが固定される後端までの距離dとは、次式を満たすようにするとよい。
【0032】
r:d≒1:3 (1)
(1)式は、健常者が坐位から立位に移行する際の膝関節の角度と足関節の角度を測定した結果に基づくものである。rとdとが(1)式を満たすことで、後述するように、膝関節6は、足関節7の3倍の角度変化し、健常者と同じ動きをすることができる。
【0033】
以上の構成に基づき、主に図4及び5を参照して、一例として坐位(椅子に座った状態)から立位に移動する動作を説明する。
【0034】
先ず、椅子に座った状態で、図1〜3に示す下肢装具を手に取り、図示しないリモコンスイッチを操作してアクチュエータ8を駆動し、膝関節6を約90度に屈曲させ、図5(a)の状態にする。このとき、プーリ9aは、引っ張りバネ9cで矢印A方向に付勢されているので、回転しない。一方、ガススプリング10は、ピストンロッド10bがアウターチューブ10aに押し込まれ、ガス反力が蓄えられる。
【0035】
次に、左右の足を足支持部5に載せて、左右の大腿を大腿支持部1に、下腿を下腿支持部3に、それぞれベルト1c、3cで固定する。その後、足をベルト5cで足支持部5に固定する。
【0036】
次に、図4(a)に示すように、椅子11に浅く座り、歩行器12に掴まりながら徐々に体重を前方に移動すると足関節7が背屈する。このとき、プーリ9aは、引っ張りバネ9cの付勢力に抗してワイヤー9bに引っ張られて矢印Aと逆方向に回転させられる。
【0037】
次に、図4(b)に示すように、椅子11から更に体重を前方に移動して臀部を浮かしながら、膝関節6を固定したまま、さらに足関節7を背屈すると、図5(b)に示すように、プーリ9aも連動して矢印Aと逆方向にさらに回転し、足関節7が約30度まで背屈したところでロッド9dが大腿支持部材2の門型フレーム2bに係合して、足関節7の背屈が停止する。このとき、体重心が足関節7の上に位置する。
【0038】
次に、図4(b)及び図5(b)の状態において、リモコンスイッチでアクチュエータ8を駆動して膝関節6を伸展させると、門型フレーム2bとロッド9dとの係合によりプーリ9aが矢印A方向に回転させられる。プーリ9aが矢印A方向に回転させられると、ワイヤー9bがプーリ9aに巻回され、足関節7が底屈させられ、図4(c)→図4(d)及び図5(c)→図5(d)になる。図4(d)及び図5(d)では、膝関節6が完全に伸展し、足関節7が完全に固定される。したがって、体重心を足の上に位置させながら足関節7、膝関節6及び股関節を同時に伸展させて容易に(小さな上腕力で)立位に至ることができる。
【0039】
なお、立位から坐位への移動は、上述の逆の動作になる。
【0040】
プーリ9aの半径rと、足関節軸7aからワイヤー9bが固定される後端までの距離dとは、(1)式を満たしているので、図4(b)→図4(c)→図4(d)及び図5(b)→図5(c)→図5(d)において、膝関節6と足関節7は、約3:1の比で連動して伸展運動をする。すなわち、膝関節6が90度から180度に伸展すると、足関節7が30度から0度に伸展する。したがって、膝関節6と足関節7とが健常者と同じように連動して伸展する。
【0041】
また、図4(b)→図4(c)→図4(d)及び図5(b)→図5(c)→図5(d)において、アクチュエータ8を駆動して膝関節6を伸展させる際、膝関節6を屈曲させた際に蓄えられたガススプリング10のガス反力も膝関節6の伸展に作用するので、アクチュエータ8を小型化することができる。
【0042】
また、本発明の装具では、アクチュエータ8とガススプリング10とをパラレルに使用しているため、従来のARGOや膝関節自動ロック式下肢装具のようなガススプリング単独使用と異なり、立ち上がり速度のコントロールができ、バランスを崩したときは、動作を停止または逆転可能であり、安全である。
【図面の簡単な説明】
【0043】
【図1】本発明の対麻痺者用立ち上がり・立位保持装具の斜視図である。
【図2】本発明の対麻痺者用立ち上がり・立位保持装具の側面図である。
【図3】本発明の対麻痺者用立ち上がり・立位保持装具の正面図である。
【図4】本発明の対麻痺者用立ち上がり・立位保持装具を装着して椅子に座った坐位から立位への動作を説明するための概略模式図である。
【図5】図4における膝関節と足関節の動作を説明するための概略模式図である。
【図6】従来の対麻痺者用下肢装具を装着して椅子に座った坐位から立位への動作を説明するための概略模式図である。
【符号の説明】
【0044】
1・・・・・・大腿支持部
2・・・・・・大腿支持部材
3・・・・・・下腿支持部
4・・・・・・下腿支持部材
4a・・・・・下腿支柱
5・・・・・・足支持部
6・・・・・・膝関節
7・・・・・・足関節
8・・・・・・アクチュエータ
9・・・・・・関節連動機構
9a・・・・・プーリ
9b・・・・・紐部材
9c・・・・・プーリ付勢手段
9d・・・・・抑制手段
10・・・・・・膝関節付勢手段
【特許請求の範囲】
【請求項1】
左右の大腿部を支持する大腿支持部と、
前記大腿支持部に連設される大腿支持部材と、
左右の下腿部を支持する下腿支持部と、
前記下腿支持部に連設される下腿支持部材と、
左右の足を支持する足支持部と、
前記大腿支持部材と前記下腿支持部材とを回動可能に結合する膝関節と、
前記下腿支持部材と前記足支持部とを回動可能に結合する足関節と、
前記膝関節を屈伸させるアクチュエータと、
前記膝関節が伸展するのと連動して前記足関節を底屈させる関節連動機構と、
を有することを特徴とする対麻痺者用立上がり・立位保持装具。
【請求項2】
前記膝関節を伸展させる方向に付勢する膝関節付勢手段を備える請求項1に記載の対麻痺者用立上がり・立位保持装具。
【請求項3】
前記下腿支持部材は、左右下腿の内側に配置される左右下腿支柱が上部と下部とで連結されてなる請求項1または2に記載の対麻痺者用立上がり・立位保持装具。
【請求項4】
前記関節連動機構は、前記膝関節の軸を回動するプーリと、一端部が前記足支持部の後端に固定され他端部が前記プーリに巻回されている紐部材と、前記紐部材が巻回される方向に前記プーリの回転を付勢するプーリ付勢手段と、前記プーリの外側に固定され前記大腿支持部材と係合して前記プーリが前記巻回される方向と反対方向に回転するのを抑制する抑制手段と、を有しており、前記足関節が背屈されると前記プーリが前記紐部材に引っ張られて回転し、前記抑制手段が前記大腿支持部材と係合して前記プーリの回転が停止する請求項1ないし3のいずれか1項に記載の対麻痺者用立上がり・立位保持装具。
【請求項1】
左右の大腿部を支持する大腿支持部と、
前記大腿支持部に連設される大腿支持部材と、
左右の下腿部を支持する下腿支持部と、
前記下腿支持部に連設される下腿支持部材と、
左右の足を支持する足支持部と、
前記大腿支持部材と前記下腿支持部材とを回動可能に結合する膝関節と、
前記下腿支持部材と前記足支持部とを回動可能に結合する足関節と、
前記膝関節を屈伸させるアクチュエータと、
前記膝関節が伸展するのと連動して前記足関節を底屈させる関節連動機構と、
を有することを特徴とする対麻痺者用立上がり・立位保持装具。
【請求項2】
前記膝関節を伸展させる方向に付勢する膝関節付勢手段を備える請求項1に記載の対麻痺者用立上がり・立位保持装具。
【請求項3】
前記下腿支持部材は、左右下腿の内側に配置される左右下腿支柱が上部と下部とで連結されてなる請求項1または2に記載の対麻痺者用立上がり・立位保持装具。
【請求項4】
前記関節連動機構は、前記膝関節の軸を回動するプーリと、一端部が前記足支持部の後端に固定され他端部が前記プーリに巻回されている紐部材と、前記紐部材が巻回される方向に前記プーリの回転を付勢するプーリ付勢手段と、前記プーリの外側に固定され前記大腿支持部材と係合して前記プーリが前記巻回される方向と反対方向に回転するのを抑制する抑制手段と、を有しており、前記足関節が背屈されると前記プーリが前記紐部材に引っ張られて回転し、前記抑制手段が前記大腿支持部材と係合して前記プーリの回転が停止する請求項1ないし3のいずれか1項に記載の対麻痺者用立上がり・立位保持装具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−63632(P2010−63632A)
【公開日】平成22年3月25日(2010.3.25)
【国際特許分類】
【出願番号】特願2008−232487(P2008−232487)
【出願日】平成20年9月10日(2008.9.10)
【出願人】(504268744)独立行政法人労働者健康福祉機構 (13)
【出願人】(594162652)株式会社松本義肢製作所 (10)
【出願人】(390005751)株式会社今仙技術研究所 (6)
【Fターム(参考)】
【公開日】平成22年3月25日(2010.3.25)
【国際特許分類】
【出願日】平成20年9月10日(2008.9.10)
【出願人】(504268744)独立行政法人労働者健康福祉機構 (13)
【出願人】(594162652)株式会社松本義肢製作所 (10)
【出願人】(390005751)株式会社今仙技術研究所 (6)
【Fターム(参考)】
[ Back to top ]