
専用着陸ゾーンのための降下率警告エンベロープを調整するためのシステムおよび方法
【課題】回転翼航空機(12)のための降下率警告を改善するためのシステムおよび方法を提供すること。
【解決手段】一例において、システム(10)は、高度値を生成する電波高度計(28)と、ユーザインターフェースデバイスおよび電波高度計と信号通信しているプロセッサ(20)とを含む。プロセッサは、航空機についての高度値およびポジション値、ならびに着陸ゾーン(LZ)情報を受信する。プロセッサは、受信されたポジション値およびLZ情報に基づいて、航空機が、周囲地形よりも高くなったLZに着陸するために進入中かどうかを判定する。プロセッサは、航空機のための降下率情報を受信し、降下率情報がLZ情報に従って調整された降下率値よりも大きい場合に、受信された降下率情報および航空機の高度値に基づいて、降下率警告を発生する。出力デバイス(22、24、34)が、発生された降下率警告を出力する。LZ情報は、高度値を含む。
【解決手段】一例において、システム(10)は、高度値を生成する電波高度計(28)と、ユーザインターフェースデバイスおよび電波高度計と信号通信しているプロセッサ(20)とを含む。プロセッサは、航空機についての高度値およびポジション値、ならびに着陸ゾーン(LZ)情報を受信する。プロセッサは、受信されたポジション値およびLZ情報に基づいて、航空機が、周囲地形よりも高くなったLZに着陸するために進入中かどうかを判定する。プロセッサは、航空機のための降下率情報を受信し、降下率情報がLZ情報に従って調整された降下率値よりも大きい場合に、受信された降下率情報および航空機の高度値に基づいて、降下率警告を発生する。出力デバイス(22、24、34)が、発生された降下率警告を出力する。LZ情報は、高度値を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本願の実施例は、例えば、専用着陸ゾーンのための降下率警告エンベロープを調整するためのシステムおよび方法を含む。
【背景技術】
【0002】
[0001]高くなった着陸ゾーン(LZ)に進入するヘリコプターが、降下率が大きすぎるという警報を受けることなく、LZ高度よりも低く下降したことが幾度かあった。ヘリデッキは(しばしば、地上または海上よりも約100メートル(数百フィート))高くなっているために、既存の降下率警告機能は、タイミングよく警告を与えない。ヘリコプター用の現在の対地接近警報装置(GPWS)では、降下率警告エンベロープは、電波高度情報のみを使用して判定される。航空機の電波高度は、ヘリコプターがヘリデッキの上に達するまで、大きな値(たとえば、100メートル(300フィート))を読み続ける。その地点で、電波高度が、たとえば、6メートル(20フィート)に急に変わる。しばしば、ヘリコプターは、その地点でヘリデッキに向かって降下していて、降下率が最適よりも大きい場合には、パイロットは反応するための十分な時間がないことがある。
【発明の概要】
【発明が解決しようとする課題】
【0003】
例えば、専用着陸ゾーンのための降下率警告エンベロープを調整することが、本願の実施例の解決課題である。
【課題を解決するための手段】
【0004】
[0002]本発明は、回転翼航空機のための降下率警告を改善するためのシステムおよび方法を提供する。一例において、システムは、高度値を生成する電波高度計と、ユーザインターフェースデバイスおよび電波高度計と信号通信しているプロセッサとを含む。プロセッサは、航空機についての高度値およびポジション値、ならびに着陸ゾーン(LZ)情報を受信する。プロセッサは、受信されたポジション値およびLZ情報に基づいて、航空機が、周囲地形よりも高くなったLZに着陸するために進入中かどうかを判定する。プロセッサは、航空機のための降下率情報を受信し、降下率情報がLZ情報に従って調整された降下率値よりも大きい場合に、受信された降下率情報および航空機の高度値に基づいて、降下率警告を発生する。出力デバイスが、発生された降下率警告を出力する。LZ情報は、高度値を含む。
【0005】
[0003]本発明の一態様において、航空機は、回転翼航空機であり、LZは、ヘリパッドである。
[0004]本発明の好ましい実施形態および代替実施形態が、次の図面を参照して、以下で詳細に説明される。
【図面の簡単な説明】
【0006】
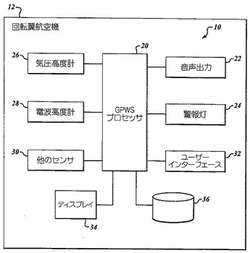
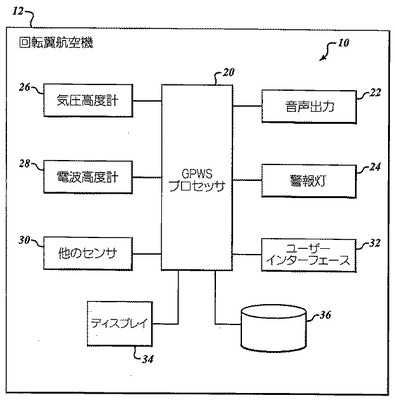
【図1】[0005]本発明の実施形態に従って形成される例示的なシステムのブロック図である。
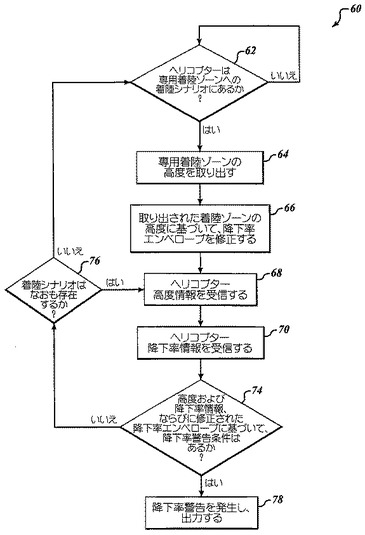
【図2】[0006]図1に示されたシステムによって実施される例示的なプロセスの流れ図である。
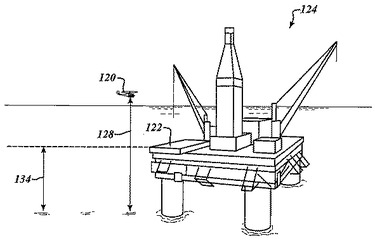
【図3】[0007]石油掘削施設上のヘリパッドに着陸するために進入中のヘリコプターの透視図である。
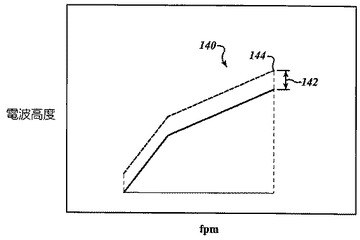
【図4】[0008]本発明の実施形態に従って修正された降下率警告エンベロープのチャートを示す図である。
【発明を実施するための形態】
【0007】
[0009]図1に示されるように、回転翼航空機12は、改善された閾値高度を使用して、「降下率」警報を与えるための警報システム10を含む。システム10は、対地接近警報装置(GPWS)プロセッサ20と、音声出力22と、警報灯24と、気圧高度計26と、電波高度計28と、1つまたは複数のさまざまな他のセンサ30と、ユーザインターフェース32と、ディスプレイデバイス34と、メモリ36とを含む。
【0008】
[0010]メモリ36は、複数の専用着陸ゾーン(LZ)に関連付けられた情報、および地形/障害物情報(たとえば、高度)を記憶する。専用LZは、周囲地形または障害物よりも高くなったヘリパッドを含む。例示的なヘリパッドは、石油掘削施設、ビル最上階、船、丘の上、または同様の場所に設置される。
【0009】
[0011]航空機12が、専用LZのうちの1つに着陸するために進入していることを判定されたとき、プロセッサ20は、メモリ36に記憶されたLZ高度情報、電波高度計28から受信された高度情報、および気圧高度計26および/または他のセンサ30(全地球測位装置(GPS)、または慣性航法装置(INS)など)からの情報に基づいた降下率に基づいて、航空機12の降下率が閾値よりも高いかどうかを判定する。
【0010】
[0012]図2は、図1に示された警報システム10によって実施される例示的な方法60を示す。最初に、決定ブロック62で、プロセッサ20が、回転翼航空機12が専用LZへの着陸シナリオにあるかどうかを判定する。プロセッサ20は、他のセンサ30から受信されたポジション情報、メモリ36に記憶された専用LZ情報、航空機構成情報(たとえば、降下率、速度)、飛行計画/経路情報および/または飛行終了の開始を指示することがある情報などの、さまざまな情報に基づいて、この判定を行う。別の実施形態においては、パイロットが、専用LZへの着陸進入を手動で指示する。
【0011】
[0013]次にブロック64で、プロセッサ20が、航空機が専用LZに着陸するために進入していると判定した場合、プロセッサ20は、メモリ36から、特定された専用LZのための高度情報を取り出す。次いでブロック66で、プロセッサ20は、取り出された高度情報に基づいて、降下率エンベロープを修正する。ブロック68、70で、航空機12のための高度情報および降下率情報が、気圧高度計26または他のセンサ30のいずれかから、プロセッサ20において受信される。次いで、決定ブロック74で、プロセッサ20は、高度情報、降下率情報、および修正された降下率エンベロープに基づいて、降下率条件があるかどうかを判定する。降下率条件がないと判定された場合、決定ブロック76で、プロセッサ20は、現在の専用LZへの着陸シナリオがまだあるかどうかを判定する。プロセッサ20が、航空機12がなおも専用LZに進入中であると判定した場合、プロセス60は、ブロック68に戻る。プロセッサ20が、航空機12がなおも専用LZに進入中であると判定しない場合、プロセス60は、ブロック62に戻る。決定ブロック74で、プロセッサ20が、降下率条件があると判定した場合、ブロック78で、降下率警告が発生され、出力デバイス(たとえば、ディスプレイ34、音声出力22、警報灯)のうちの1つまたは複数に出力される。
【0012】
[0014]図3は、海水位よりもいくぶん高いところに設置されたヘリパッド122(専用LZ)を含む、石油掘削施設プラットフォーム124を示す。ヘリコプター120は、水上高度128(または電波高度)で、ヘリパッド122(または高くなった構造体の上に設置された他のプラットフォーム)に進入している。先行システムでは、降下率エンベロープが有効になる地点までに、ヘリコプター120がヘリパッド122より低くならない限り、ヘリコプター120がヘリパッド122の真上に来る以前に、降下率警告は発生されないことになる。
【0013】
[0015]図4は、航空機が専用LZに着陸するために進入しているときに修正された例示的な降下率エンベロープ140を示す。この例で、航空機12が進入しているLZは、周囲地形より上300フィート/100メートルである。プロセッサ20が、LZの高さ情報を受信すると、プロセッサ20は、受信されたLZの高さ情報と同じ量142、またはLZの高さ情報に比例した量142だけ、降下率エンベロープ140の上限境界144を調整する。こうして、毎分366メートル(毎分1200フィート(fpm))の降下率において、通常のLZに進入中の航空機の降下率が高度122メートル(400フィート)で降下率警告条件をもたらさないときには、このケースにあることになる。
【0014】
[0016]上記のように、本発明の好ましい実施形態が示され、説明されてきたが、本発明の趣旨および範囲から逸脱せずに、多くの変更形態が行われてもよい。たとえば、本発明は、垂直離着陸機(VTOL)または垂直短距離離着陸機(VSTOL)で使用されてもよい。
【0015】
[0017]独占的な所有権または特権が請求される本発明の実施形態は、以下のように定義される。
【符号の説明】
【0016】
10 警報システム
12 回転翼航空機
20 対地接近警報装置(GPWS)プロセッサ
22 音声出力
24 警報灯
26 気圧高度計
28 電波高度計
30 他のセンサ
32 ユーザインターフェース
34 ディスプレイデバイス
36 メモリ
120 ヘリコプター
122 ヘリパッド
124 石油掘削施設プラットフォーム
128 水上高度
140 降下率エンベロープ
142 量
144 上限境界
【技術分野】
【0001】
本願の実施例は、例えば、専用着陸ゾーンのための降下率警告エンベロープを調整するためのシステムおよび方法を含む。
【背景技術】
【0002】
[0001]高くなった着陸ゾーン(LZ)に進入するヘリコプターが、降下率が大きすぎるという警報を受けることなく、LZ高度よりも低く下降したことが幾度かあった。ヘリデッキは(しばしば、地上または海上よりも約100メートル(数百フィート))高くなっているために、既存の降下率警告機能は、タイミングよく警告を与えない。ヘリコプター用の現在の対地接近警報装置(GPWS)では、降下率警告エンベロープは、電波高度情報のみを使用して判定される。航空機の電波高度は、ヘリコプターがヘリデッキの上に達するまで、大きな値(たとえば、100メートル(300フィート))を読み続ける。その地点で、電波高度が、たとえば、6メートル(20フィート)に急に変わる。しばしば、ヘリコプターは、その地点でヘリデッキに向かって降下していて、降下率が最適よりも大きい場合には、パイロットは反応するための十分な時間がないことがある。
【発明の概要】
【発明が解決しようとする課題】
【0003】
例えば、専用着陸ゾーンのための降下率警告エンベロープを調整することが、本願の実施例の解決課題である。
【課題を解決するための手段】
【0004】
[0002]本発明は、回転翼航空機のための降下率警告を改善するためのシステムおよび方法を提供する。一例において、システムは、高度値を生成する電波高度計と、ユーザインターフェースデバイスおよび電波高度計と信号通信しているプロセッサとを含む。プロセッサは、航空機についての高度値およびポジション値、ならびに着陸ゾーン(LZ)情報を受信する。プロセッサは、受信されたポジション値およびLZ情報に基づいて、航空機が、周囲地形よりも高くなったLZに着陸するために進入中かどうかを判定する。プロセッサは、航空機のための降下率情報を受信し、降下率情報がLZ情報に従って調整された降下率値よりも大きい場合に、受信された降下率情報および航空機の高度値に基づいて、降下率警告を発生する。出力デバイスが、発生された降下率警告を出力する。LZ情報は、高度値を含む。
【0005】
[0003]本発明の一態様において、航空機は、回転翼航空機であり、LZは、ヘリパッドである。
[0004]本発明の好ましい実施形態および代替実施形態が、次の図面を参照して、以下で詳細に説明される。
【図面の簡単な説明】
【0006】
【図1】[0005]本発明の実施形態に従って形成される例示的なシステムのブロック図である。
【図2】[0006]図1に示されたシステムによって実施される例示的なプロセスの流れ図である。
【図3】[0007]石油掘削施設上のヘリパッドに着陸するために進入中のヘリコプターの透視図である。
【図4】[0008]本発明の実施形態に従って修正された降下率警告エンベロープのチャートを示す図である。
【発明を実施するための形態】
【0007】
[0009]図1に示されるように、回転翼航空機12は、改善された閾値高度を使用して、「降下率」警報を与えるための警報システム10を含む。システム10は、対地接近警報装置(GPWS)プロセッサ20と、音声出力22と、警報灯24と、気圧高度計26と、電波高度計28と、1つまたは複数のさまざまな他のセンサ30と、ユーザインターフェース32と、ディスプレイデバイス34と、メモリ36とを含む。
【0008】
[0010]メモリ36は、複数の専用着陸ゾーン(LZ)に関連付けられた情報、および地形/障害物情報(たとえば、高度)を記憶する。専用LZは、周囲地形または障害物よりも高くなったヘリパッドを含む。例示的なヘリパッドは、石油掘削施設、ビル最上階、船、丘の上、または同様の場所に設置される。
【0009】
[0011]航空機12が、専用LZのうちの1つに着陸するために進入していることを判定されたとき、プロセッサ20は、メモリ36に記憶されたLZ高度情報、電波高度計28から受信された高度情報、および気圧高度計26および/または他のセンサ30(全地球測位装置(GPS)、または慣性航法装置(INS)など)からの情報に基づいた降下率に基づいて、航空機12の降下率が閾値よりも高いかどうかを判定する。
【0010】
[0012]図2は、図1に示された警報システム10によって実施される例示的な方法60を示す。最初に、決定ブロック62で、プロセッサ20が、回転翼航空機12が専用LZへの着陸シナリオにあるかどうかを判定する。プロセッサ20は、他のセンサ30から受信されたポジション情報、メモリ36に記憶された専用LZ情報、航空機構成情報(たとえば、降下率、速度)、飛行計画/経路情報および/または飛行終了の開始を指示することがある情報などの、さまざまな情報に基づいて、この判定を行う。別の実施形態においては、パイロットが、専用LZへの着陸進入を手動で指示する。
【0011】
[0013]次にブロック64で、プロセッサ20が、航空機が専用LZに着陸するために進入していると判定した場合、プロセッサ20は、メモリ36から、特定された専用LZのための高度情報を取り出す。次いでブロック66で、プロセッサ20は、取り出された高度情報に基づいて、降下率エンベロープを修正する。ブロック68、70で、航空機12のための高度情報および降下率情報が、気圧高度計26または他のセンサ30のいずれかから、プロセッサ20において受信される。次いで、決定ブロック74で、プロセッサ20は、高度情報、降下率情報、および修正された降下率エンベロープに基づいて、降下率条件があるかどうかを判定する。降下率条件がないと判定された場合、決定ブロック76で、プロセッサ20は、現在の専用LZへの着陸シナリオがまだあるかどうかを判定する。プロセッサ20が、航空機12がなおも専用LZに進入中であると判定した場合、プロセス60は、ブロック68に戻る。プロセッサ20が、航空機12がなおも専用LZに進入中であると判定しない場合、プロセス60は、ブロック62に戻る。決定ブロック74で、プロセッサ20が、降下率条件があると判定した場合、ブロック78で、降下率警告が発生され、出力デバイス(たとえば、ディスプレイ34、音声出力22、警報灯)のうちの1つまたは複数に出力される。
【0012】
[0014]図3は、海水位よりもいくぶん高いところに設置されたヘリパッド122(専用LZ)を含む、石油掘削施設プラットフォーム124を示す。ヘリコプター120は、水上高度128(または電波高度)で、ヘリパッド122(または高くなった構造体の上に設置された他のプラットフォーム)に進入している。先行システムでは、降下率エンベロープが有効になる地点までに、ヘリコプター120がヘリパッド122より低くならない限り、ヘリコプター120がヘリパッド122の真上に来る以前に、降下率警告は発生されないことになる。
【0013】
[0015]図4は、航空機が専用LZに着陸するために進入しているときに修正された例示的な降下率エンベロープ140を示す。この例で、航空機12が進入しているLZは、周囲地形より上300フィート/100メートルである。プロセッサ20が、LZの高さ情報を受信すると、プロセッサ20は、受信されたLZの高さ情報と同じ量142、またはLZの高さ情報に比例した量142だけ、降下率エンベロープ140の上限境界144を調整する。こうして、毎分366メートル(毎分1200フィート(fpm))の降下率において、通常のLZに進入中の航空機の降下率が高度122メートル(400フィート)で降下率警告条件をもたらさないときには、このケースにあることになる。
【0014】
[0016]上記のように、本発明の好ましい実施形態が示され、説明されてきたが、本発明の趣旨および範囲から逸脱せずに、多くの変更形態が行われてもよい。たとえば、本発明は、垂直離着陸機(VTOL)または垂直短距離離着陸機(VSTOL)で使用されてもよい。
【0015】
[0017]独占的な所有権または特権が請求される本発明の実施形態は、以下のように定義される。
【符号の説明】
【0016】
10 警報システム
12 回転翼航空機
20 対地接近警報装置(GPWS)プロセッサ
22 音声出力
24 警報灯
26 気圧高度計
28 電波高度計
30 他のセンサ
32 ユーザインターフェース
34 ディスプレイデバイス
36 メモリ
120 ヘリコプター
122 ヘリパッド
124 石油掘削施設プラットフォーム
128 水上高度
140 降下率エンベロープ
142 量
144 上限境界
【特許請求の範囲】
【請求項1】
航空機に対して実施される方法であって、
前記航空機(12)のプロセッサ(20)において、
前記航空機についての高度値(altitude value)およびポジション値(position value)を受信するステップと、
着陸ゾーン(LZ:landing zone)情報を受信するステップと、
受信されたポジション値およびLZ情報に基づいて、前記航空機が、周囲地形(surrounding terrain)よりも高くなったLZに着陸するために進入中(on an approach)かどうかを判定するステップと、
前記航空機のための降下率(sink rate)情報を受信するステップと、
前記降下率情報が、前記LZ情報および前記航空機の高度値に従って調整された降下率値よりも大きい場合に、降下率警告(sink rate alert)を発生するステップと
を含み、
出力デバイス(22、24、34)において、
発生された降下率警告を出力するステップ
を含む方法。
【請求項2】
前記LZ情報が、高度値を含み、出力するステップが、可聴式メッセージまたは視覚的メッセージのうちの少なくとも1つを出力するステップを含み、前記航空機が、回転翼(rotary wing)航空機であり、前記LZが、ヘリパッド(helipad)を含む、請求項1に記載の方法。
【請求項3】
高度値を生成するように構成された電波高度計(radio altimeter)(28)と、
前記航空機についての高度値およびポジション値を受信するように構成されたコンポーネント、
着陸ゾーン(LZ)情報を受信するように構成されたコンポーネント、
受信されたポジション値およびLZ情報に基づいて、前記航空機が、周囲地形よりも高くなったLZに着陸するために進入中かどうかを判定するように構成されたコンポーネント、
前記航空機のための降下率情報を受信するように構成されたコンポーネント、ならびに
前記降下率情報が前記LZ情報に従って調整された降下率値よりも大きい場合に、受信された降下率情報および前記航空機の高度値に基づいて、降下率警告を発生するように構成されたコンポーネント
を含む、前記電波高度計と信号通信しているプロセッサ(20)と、
前記プロセッサと信号通信しており、発生された降下率警告を出力するように構成された出力デバイス(22、24、34)と
を含む、航空機に設置されたシステムであって、
前記出力デバイスが、音声デバイスまたはビデオデバイスであり、
前記LZ情報が、高度値を含み、
前記航空機が、回転翼航空機であり、
前記LZが、ヘリパッドを含む、
システム。
【請求項1】
航空機に対して実施される方法であって、
前記航空機(12)のプロセッサ(20)において、
前記航空機についての高度値(altitude value)およびポジション値(position value)を受信するステップと、
着陸ゾーン(LZ:landing zone)情報を受信するステップと、
受信されたポジション値およびLZ情報に基づいて、前記航空機が、周囲地形(surrounding terrain)よりも高くなったLZに着陸するために進入中(on an approach)かどうかを判定するステップと、
前記航空機のための降下率(sink rate)情報を受信するステップと、
前記降下率情報が、前記LZ情報および前記航空機の高度値に従って調整された降下率値よりも大きい場合に、降下率警告(sink rate alert)を発生するステップと
を含み、
出力デバイス(22、24、34)において、
発生された降下率警告を出力するステップ
を含む方法。
【請求項2】
前記LZ情報が、高度値を含み、出力するステップが、可聴式メッセージまたは視覚的メッセージのうちの少なくとも1つを出力するステップを含み、前記航空機が、回転翼(rotary wing)航空機であり、前記LZが、ヘリパッド(helipad)を含む、請求項1に記載の方法。
【請求項3】
高度値を生成するように構成された電波高度計(radio altimeter)(28)と、
前記航空機についての高度値およびポジション値を受信するように構成されたコンポーネント、
着陸ゾーン(LZ)情報を受信するように構成されたコンポーネント、
受信されたポジション値およびLZ情報に基づいて、前記航空機が、周囲地形よりも高くなったLZに着陸するために進入中かどうかを判定するように構成されたコンポーネント、
前記航空機のための降下率情報を受信するように構成されたコンポーネント、ならびに
前記降下率情報が前記LZ情報に従って調整された降下率値よりも大きい場合に、受信された降下率情報および前記航空機の高度値に基づいて、降下率警告を発生するように構成されたコンポーネント
を含む、前記電波高度計と信号通信しているプロセッサ(20)と、
前記プロセッサと信号通信しており、発生された降下率警告を出力するように構成された出力デバイス(22、24、34)と
を含む、航空機に設置されたシステムであって、
前記出力デバイスが、音声デバイスまたはビデオデバイスであり、
前記LZ情報が、高度値を含み、
前記航空機が、回転翼航空機であり、
前記LZが、ヘリパッドを含む、
システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−95420(P2013−95420A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−238945(P2012−238945)
【出願日】平成24年10月30日(2012.10.30)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2012−238945(P2012−238945)
【出願日】平成24年10月30日(2012.10.30)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
[ Back to top ]