
射出成形品自動取出ロボット用の成形品保持装置
【課題】四つ又は四の倍数の数の型が二行多列でマトリックス状に配置された金型を用いて成形品を成形することを前提に、型同士の間隔を異にする金型に交換されても、成形された成形品のそれぞれを保持することのできる射出成形品自動取出ロボット用の成形品保持装置を提供する。
【解決手段】成形品自動取出ロボットのロボットアームRAに連結されるユニットベース20と、ユニットベース上に二行二列で配置された四つの保持手段21とを有する装置ユニット2を備え、装置ユニットは、各行の保持手段を列方向に接離させる第一作動手段22と、各列の保持手段を行方向に接離させる第二作動手段23とを備えている。
【解決手段】成形品自動取出ロボットのロボットアームRAに連結されるユニットベース20と、ユニットベース上に二行二列で配置された四つの保持手段21とを有する装置ユニット2を備え、装置ユニットは、各行の保持手段を列方向に接離させる第一作動手段22と、各列の保持手段を行方向に接離させる第二作動手段23とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、射出成形機に装備された金型を型開きしたときに、金型間にある射出成形品を取り出す射出成形品自動取出ロボット用の成形品保持装置に関する。
【背景技術】
【0002】
これまで、各種製品や部品等を成形する成形工法として種々のものが提案されてきたが、近年においては、成形性能(例えば、成形精度や成形サイクル等)が他の成形工法よりも優れるとして、射出成形が広く一般に普及している。
【0003】
射出成形用の成形機(射出成形機)は、少なくとも二つの金型が互いに対峙するように配置されて装備される。二つの金型の少なくとも何れか一方は、相手方の金型と対向する面(以下、分割面という)に成形対象となる製品や部品の外形と対応した型が形成される。そして、何れか他方の金型に対して樹脂を充填するためのスプルゥが分割面と直交方向に延びて該分割面上で開口するように形成されるとともに、該スプルゥと型とを繋ぐランナーが溝状をなして分割面上に形成される。これにより、二つの金型は、互いに重ね合わさった状態で、分割面間に成形対象(部品)の外形に即した成形空間を形成し、スプルゥ及びランナーを介して成形空間に樹脂を供給できるようになっている。
【0004】
そして、一回の成形サイクルで複数個の成形品を成形する場合、金型の分割面上に複数の型が形成される。この場合、各型(成形空間)に対して均等に樹脂を充填できるように、複数の型は、それぞれ分割面上のスプルゥ(開口)から等距離になるように配置される。具体的には、金型の分割面上に四つ又は四の倍数の数の型が二行多列になるように配置され、その型を四つ一組にすることを前提に、スプルゥは四つの型が配置される行及び列で画定される矩形領域の中央で開口するように形成され、四つの型とスプルゥとを繋ぐ四つのランナーはスプルゥの開口を中心にして放射状に延びてそれぞれ同一又は略同一の長さになるよう形成される。これにより、スプルゥから供給される樹脂は、各ランナーを介して各型に均等に充填される。
【0005】
そして、射出成形機は、上述のように金型が形成されることを前提に、成形品を成形する際に二つの金型を接近させて互いの分割面を当接させる(いわゆる、型締めする)一方、成形した成形品を取り出す際に二つの金型を離間させる(いわゆる、型開きする)ようになっている。これにより、射出成形機は、金型を型開きしたときに、スプルゥやランナー内で硬化した樹脂が四つの成形品から分離され、一方の金型の分割面上に成形品が残った状態(成形品のみを取り出せる状態)になるように構成されている。
【0006】
ところで、成形品の量産に伴って生産サイクルの短縮化が要求されるため、通常、射出成形機に対して成形品を自動的に取り出す成形品自動取出装置が設けられる。
【0007】
成形品自動取出装置には、金型の分割面上に残る成形品を外方に押し出すプッシャを備えたエジェクタ機構が採用されることが多いが、この種の成形品自動取出装置は、単にプッシャで成形品を押し出して下方に落下させるだけであるため、成形品を所定の位置に集積するにはコンベア等を配置しなければならない。また、この種の成形品自動取出装置は、金型と隣接するように配置して該金型にプッシャを挿通させなければならないため、射出成形機のサイズや、金型の型の数、配置等の制限を受けてしまう。
【0008】
そのため、成形品の取り出しと成形品の移送とを行うことのできる射出成形品自動取出ロボットが成形品自動取出装置として射出成形機に並設されることがある。
【0009】
かかる射出成形品自動取出ロボットは、上下方向(Y軸方向)、横方向(X軸方向)及び前後方向(Z軸方向)に移動可能なロボットアームと、該ロボットアームの先端に取り付けられる成形品保持装置(以下、保持装置という)とで構成されている(例えば、特許文献1参照)。
【0010】
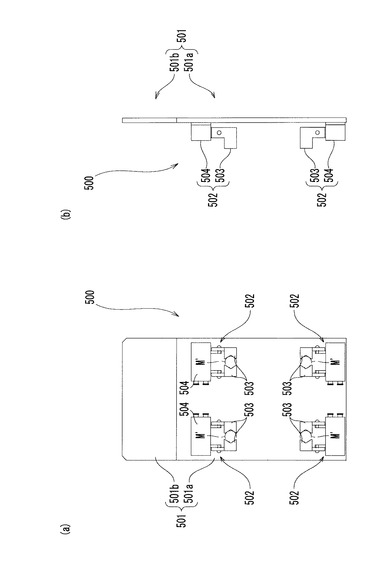
前記保持装置は、図8(a)及び図8(b)に示す如く、支持フレーム501と、該支持フレーム501に取り付けられた保持手段502…とを備えている。前記支持フレーム501は、保持手段502…が配置される板状のフレーム本体501aと、該フレーム本体501aに連設され、ロボットアーム(図示しない)の先端部(接続構造)に対して着脱可能な連結部501bとを備えている。
【0011】
前記保持手段502…は、金型の分割面上の型の配置に対応するように配置される。すなわち、上述の如く、金型の分割面上に四つ又は四の倍数の数の型が二行多列になるように配置される場合、四つ又は四の倍数の数の保持手段502…が二行多列のマトリックス状の配置になるようにフレーム本体501aに固定される。
【0012】
各保持手段502…は、例えば、互いに対峙するように配置された一対の挟持体503,503と、フレーム本体501aの一方の面上に固定され、前記一対の挟持体503,503を互いに接離させるアクチュエータ504(例えば、エアシリンダや、電動シリンダ等)とを備えており、アクチュエータ504の作動で一対の挟持体503,503を接離させることで成形品M’に対する保持とその解除とを行うようになっている。
【0013】
これにより、上記構成の射出成形品自動取出ロボットは、金型間にある各成形品(金型の分割面上に残る成形品)M’を各保持手段502…(一対の挟持体503,503)に
保持させた状態でロボットアームを動作させることで、保持装置500とともに成形品M’を所定の位置まで移送することができ、該所定の位置で保持手段502…による成形品M’の保持を解除することで成形品M’を落下させて所望の集積位置に集積できるようになっている。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2000−326374号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
ところで、射出成形機は、成形の対象(成形品M’)を変更すべく金型が交換されるこ
とがあるが、型の配置が異なる金型(隣り合う型同士の間隔が交換前の金型と異なる別の金型)に交換する場合、射出成形品自動取出ロボットの保持装置500も新たな金型に対応するものに交換しなければならない。すなわち、保持装置500の四つ又は四の倍数の数の保持手段502…は、特定の金型の四つの型に対応するように配置されるため、型の配置が異なる金型に交換した場合、各保持手段502…の配置が交換後の金型の型の配置に対応した保持装置に交換しなければならなかった。
【0016】
かかる保持装置500の交換作業は、ロボットアームに対する保持装置500の連結作業及び連結解除作業を行うだけでなく、保持手段502…を作動させるアクチュエータ504へのエネルギー供給ライン(例えば、圧縮エアをエネルギーとする場合には、エアホース)の接続作業やその接続を解除するための作業を必要とするため、非常に繁雑である。
【0017】
また、このように保持装置500を交換した場合、交換後の保持装置500(保持手段502)と金型(型)との位置合わせするために、煩雑なロボットアームのティーチング作業が必要となる。そのため、従来の保持装置500を採用した場合、金型の交換に伴う付随的な作業が多くなってラインを止める時間が長くなり、生産効率を低下させるといった問題があった。
【0018】
そこで、本発明は、斯かる実情に鑑み、射出成形品を成形する四つ又は四の倍数の数の型が二行多列でマトリックス状に配置された金型を用いて射出成形品を成形することを前提に、型同士の間隔を異にする金型に交換した際、煩雑な作業を行うことなく交換後の金型で成形された成形品を保持できる状態にすることのできる射出成形品自動取出ロボット用の成形品保持装置を提供することを課題とする。
【課題を解決するための手段】
【0019】
本発明に係る射出成形品自動取出ロボット用の成形品保持装置は、射出成形機に対して交換可能に装備された少なくとも二つの金型の分割面同士が離間した状態で、何れか一つの金型の分割面から対向する金型に向けて突出し、且つ該分割面上で二行多列のマトリックス状に配置された四つ又は四の倍数の数の成形品を取り出すべく、成形品を保持可能な保持手段が金型上の成形品の配置に対応して二行多列で配置される射出成形品自動取出ロボット用の成形品保持装置であって、射出成形品自動取出ロボットのロボットアームに対して直接的又は間接的に連結されるユニットベースと、該ユニットベース上に平面的に二行二列で配置された四つの保持手段とを有する装置ユニットを少なくとも一つ備え、装置ユニットは、異なる行の保持手段同士を列方向で相対的に接離させる第一作動手段と、異なる列の保持手段同士を行方向で相対的に接離させる第二作動手段とを備えていることを特徴とする。ここで「行」及び「列」とは、マトリックスを構成する並びを意味するものであり、「行」が横方向又は縦方向の何れか一方の並びであるときに、「列」が「行」と直交する方向の並びであることを意味する。すなわち、「行」というときには、横方向又は縦方向の何れか一方の並び方向を意味し、「列」というときには、横方向又は縦方向の何れか他方の並び方向を意味するものである。
【0020】
上記構成の射出成形品自動取出ロボット用の成形品保持装置は、第一作動手段で同じ行にある二つの保持手段と別の行にある二つの保持手段とを接離させることができるため、四つの保持手段を二行二列のマトリックス状の配置で維持させつつ、二行の間隔(異なる行の保持手段同士の間隔)を二列の間隔(異なる列の保持手段同士の間隔)よりも広い間隔にしたり、二行の間隔(異なる行の保持手段同士の間隔)を二列の間隔(異なる列の保持手段同士の間隔)よりも狭い間隔にしたりすることができる。
【0021】
また、上記構成の射出成形品自動取出ロボット用の成形品保持装置は、第二作動手段で同じ列にある二つの保持手段と別の列にある二つの保持手段とを接離させることができるため、四つの保持手段を二行二列のマトリックス状の配置を維持させつつ、二列の間隔(異なる列の保持手段同士の間隔)を二行の間隔(異なる行の保持手段同士の間隔)よりも広い間隔にしたり、二列の間隔(異なる列の保持手段同士の間隔)を二行の間隔(異なる行の保持手段同士の間隔)よりも狭い間隔にしたりすることができる。すなわち、上記構成の射出成形品自動取出ロボット用の成形品保持装置は、第二作動手段に対する操作においても、四つの保持手段を二行二列のマトリックス状の配置で維持させつつ、二行の間隔(異なる行の保持手段同士の間隔)を二列の間隔(異なる列の保持手段同士の間隔)よりも広い間隔にしたり、二行の間隔(異なる行の保持手段同士の間隔)を二列の間隔(異なる列の保持手段同士の間隔)よりも狭い間隔にしたりすることができる。
【0022】
さらに、上記構成の射出成形品自動取出ロボット用の成形品保持装置は、第一作動手段及び第二作動手段の両方を操作することで、第一作動手段で同じ行にある二つの保持手段と別の行にある二つの保持手段とを接離させるとともに、第二作動手段で同じ列にある二つの保持手段と別の列にある二つの保持手段とを接離させることができため、四つの保持手段を二行二列のマトリックス状の配置で維持させつつ、二列の間隔(異なる列の保持手段同士の間隔)と二行の間隔(異なる行の保持手段同士の間隔)とを同じ間隔にすることもできる。
【0023】
従って、マトリックス状に配置される四つの保持手段の配置を金型の型で成形されて一方の金型の分割面上に残る四つの成形品の配置に対応させることができる。これにより、射出成形機に装備される金型が交換されても、当該成形品保持装置を交換することなく、交換後の金型で成形された成形品を適正に保持することができる。また、装置ユニットを二つ以上設け、全ての装置ユニットの保持手段が整列して二行をなすように、二つ以上の装置ユニットを横並びに配置するとともに、隣り合う装置ユニット同士を行方向又は列方向に接離可能に設けることで、行方向又は列方向で隣り合う装置ユニットの保持手段同士の間隔を調整することができる。これにより、金型の分割面上で二行多列のマトリックス状に配置された四の倍数の数(例えば、八個、十二個…)の成形品を、保持装置を交換することなく各保持手段で適正に保持することができる。
【0024】
本発明の一態様として、各保持手段は、互いに接離可能に設けられた一対の挟持爪を備え、各保持手段の一対の挟持爪は、先端が他の行及び他の列に属する保持手段側に向くように配置されるとともに、対向する相手方の挟持爪と対向する面とは反対側の面が先端に向かうにつれて相手方の挟持爪側に近づくように形成されていることが好ましい。このようにすれば、各行の保持手段を列方向で相対的に接近させるとともに、各列の保持手段を行方向で相対的に接近させたときに、隣り合う保持手段の挟持爪同士が干渉するのを抑制することができる。従って、隣り合う保持手段を最大限接近させることができ、金型の分割面上でマトリックス状に配置された型の間隔が狭くても、その型で成形された成形品を各保持手段で保持することができる。
【0025】
本発明の他態様として、前記第一作動手段は、各行に沿って配置された一対の第一案内体と、該一対の第一案内体に跨るように配置された第一案内ネジとで構成され、各第一案内体は、少なくとも一端側及び他端側に行に沿って延び且つ一方の面側から反対の他方の面側に貫通した第一スリットが形成され、第一案内ネジは、軸線方向の中央側から一端に向けて一方の第一案内体に螺合する第一正ネジが形成される一方、前記中央側から他端に向けて他方の第一案内体に螺合する第一逆ネジが形成され、前記第二作動手段は、前記一対の第一案内体に跨るように各列に沿って配置された一対の第二案内体と、該一対の第二案内体に跨るように配置された第二案内ネジとで構成され、各第二案内体は、少なくとも一端側及び他端側に列に沿って延び且つ一方の面側から反対の他方の面側に貫通した第二スリットが形成され、第二案内ネジは、軸線方向の中央側から一端に向けて一方の第二案内体に螺合する第二正ネジが形成される一方、前記中央側から他端に向けて他方の第二案内体に螺合する第二逆ネジが形成され、各保持手段は、第一スリットと第二スリットとの重複領域に挿入される案内軸が直接的又は間接的に連設されていることが好ましい。このようにすれば、各保持手段を行方向及び列方向に精度よく移動させることができる。
【0026】
具体的に説明すると、一方の第一案内体に第一案内ネジの第一正ネジが螺合されるとともに他方の第一案内体に第一案内ネジの第一逆ネジが螺合されているため、第一案内ネジを回転させると、一対の第一案内体はそれぞれ第一案内ネジに沿って逆方向に移動して接離することになる。
【0027】
そうすると、各保持手段に連設された案内軸は、第一案内体(第一スリットの両側にある実体のある部分の何れか一方)に押されて該第一案内体と同一方向に移動することになるため、該案内軸が連設された保持手段も同様の態様で移動することになる。従って、第一案内ネジの回転操作だけで各行の保持手段を列方向で精度よく接離させることができる。
【0028】
また、一方の第二案内体に第二案内ネジの第二正ネジが螺合されるとともに他方の第二案内体に第二案内ネジの第二逆ネジが螺合されているため、第二案内ネジを回転させると、一対の第二案内体はそれぞれ第二案内ネジに沿って逆方向に移動して接離することになる。
【0029】
そうすると、各保持手段に連設された案内軸は、第二案内体(第二スリットの両側にある実体のある部分の何れか一方)に押されて該第二案内体と同一方向に移動することになるため、該案内軸が連設された保持手段も同様の態様で移動することになる。従って、第二案内ネジの回転操作だけで各列の保持手段を行方向で精度よく接離させることができる。
【0030】
本発明の別の態様として、金型の分割面上で二行二列のマトリックス状に配置された四つの成形品を取り出すことを前提に、前記ユニットベースに基端部が枢結された支持アームをさらに備え、該支持アームは、先端側がロボットアームに連結可能に構成されていることが好ましい。このようにすれば、四つの保持手段の行方向及び列方向の間隔を維持しつつ四つ保持手段を一体的にして回転させることができる。従って、交換後の金型の型の配置が交換前の金型の型の配置に対して傾いた配置になっても、四つの成形品を確実に保持することができる。
【0031】
この場合、前記支持アームは、列及び行が異なる保持手段の成形品の保持中心同士を結ぶ二本の仮想線の交点が回転中心になるように基端部がユニットベースに枢結されていることが好ましい。このようにすれば、ロボットアームのティーチング(動作設定)を行うことなく保持手段の行単位又は列単位での配置の変更、或いは装置ユニットの回転による保持手段全体の配置の変更だけで成形品を各保持手段で保持できる状態にできる。具体的には、何れの金型においてもマトリックス状に配置される四つの型は、スプルゥの開口を中心にして放射状に延びる同一長さのランナーによってスプルゥと連続するように配置されるため、スプルゥの開口と保持装置の前記交点とが一致する状態(前記開口と交点とが同一直線上に位置する状態)が、保持手段で成形品を保持可能な保持装置の配置の基準とされる。従って、支持アームの回転中心を前記交点と一致させ、該交点(回転中心)が金型のスプルゥと一致する位置(交点とスプルゥとが同一直線上に位置する配置)を保持装置の基準位置としてロボットアームをティーチングしておけば、型の配置の異なる金型に変更してもロボットアームのティーチングを行うことなく保持手段の行単位又は列単位での配置の変更、或いは装置ユニットの回転による保持手段全体の配置の変更だけで成形品を各保持手段で保持できる状態にできる。
【発明の効果】
【0032】
以上のように、本発明の射出成形品自動取出ロボット用の成形品保持装置によれば、出成形品を成形する四つ又は四の倍数の数の型が二行多列でマトリックス状に配置された金型を用いて射出成形品を成形することを前提に、型同士の間隔を異にする金型に交換した際、煩雑な作業を行うことなく交換後の金型で成形された成形品を保持できる状態にすることができるという優れた効果を奏し得る。
【図面の簡単な説明】
【0033】
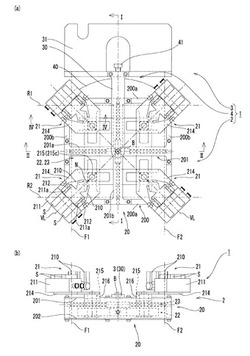
【図1】本発明の一実施形態に係る射出成形品自動取出ロボット用の成形品保持装置の説明図であって、(a)は、正面図を示し、(b)は底面図を示す。
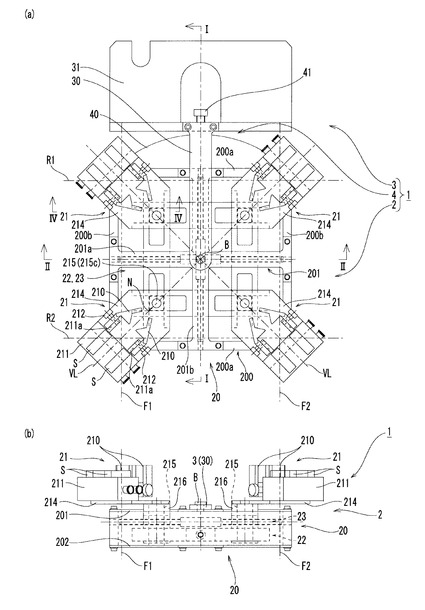
【図2】同実施形態に係る射出成形品自動取出ロボット用の成形品保持装置の断面図であって、(a)は、図1のI−I断面を示し、(b)は、図1のII−II断面を示す。
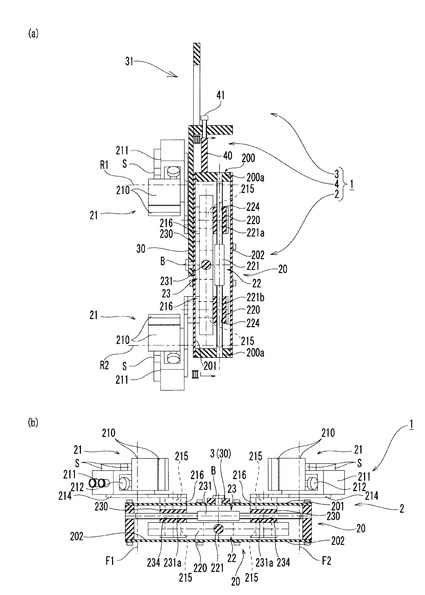
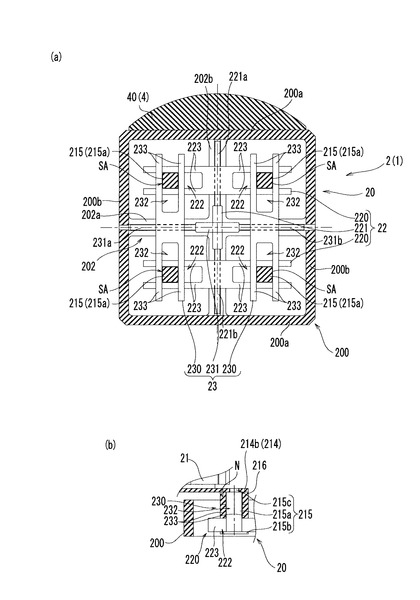
【図3】同実施形態に係る射出成形品自動取出ロボット用の成形品保持装置の断面図であって、(a)は、図2のIII−III断面図を示し、(b)は、図1のIV−IV断面図を示す。
【図4】同実施形態に係る射出成形品自動取出ロボット用の成形品保持装置の保持手段及び支持体の説明図であって、(a)は正面図を示し、(b)は、側面図を示す。
【図5】同実施形態に係る射出成形品自動取出ロボット用の成形品保持装置で成形品を取り出すときの工程図であって、(a)は、製品の成形時に保持装置を待機させている状態を示し、(b)は、二つの金型が型開きされた状態を示し、(c)は、金型間に保持装置を配置した状態を示し、(d)は、保持装置の保持手段で成形品を保持する状態を示し、(e)は、金型から成形品を取り外した状態を示し、(f)は、成形品を集積位置にまで移送する状態を示す。
【図6】同実施形態に係る射出成形品自動取出ロボット用の成形品保持装置の作動説明図であって、(a)は、各行の保持手段を列方向に接離させる状態を示し、(b)は、各列の保持手段を行方向に接離させる状態を示し、(c)は、各保持手段を行方向及び列方向に接離させる状態を示し、(d)は、装置ユニットを回転させる状態を示す。
【図7】本発明の他実施形態に係る射出成形品自動取出ロボット用の成形品保持装置の正面図を示す。
【図8】従来の射出成形品自動取出ロボット用の成形品保持装置の説明図であって、(a)は、正面図を示し、(b)は、側面図を示す。
【発明を実施するための形態】
【0034】
以下、本発明の一実施形態に係る射出成形品自動取出ロボット用の成形品保持装置(以下、単に保持装置という)について添付図面を参照しつつ説明する。
【0035】
本実施形態に係る保持装置は、射出成形機に装備された二つの金型を離間させた状態(いわゆる、型開きした状態)で、金型間にある四つの成形品を取り出すことを対象としている。すなわち、本実施形態の保持装置が装備される射出成形品自動取出ロボットは、少なくとも二つの金型が互いに対峙するように装備される射出成形機に付設されるものであり、二つの金型を型開きした状態で、スプルゥやランナー内で硬化した樹脂が分離されて一方の金型の分割面上に二行二列のマトリックス状の配置で残る四つの成形品を取り出すことを対象としている。
【0036】
これに伴い、本実施形態に係る保持装置は、図1(a)、図1(b)、図2(a)、及び図2(b)に示す如く、射出成形品自動取出ロボットRのロボットアームRA(図6参照)に対して直接的又は間接的に連結されるユニットベース20と、該ユニットベース20上に平面的に二行二列で配置された四つの保持手段21…とを有する装置ユニット2を一つ備えている。また、本実施形態に係る保持装置1は、図1(a)及び図2(a)に示す如く、装置ユニット2のユニットベース20に基端部が枢結された支持アーム3をさらに備えている。
【0037】
前記装置ユニット2は、前記ユニットベース20及び四つの保持手段21…を備える他、各行R1,R2の保持手段21…を列F1,F2方向に相対的に接離させる第一作動手段22と、各列F1,F2の保持手段21…を行R1,R2方向に相対的に接離させる第二作動手段23とをさらに備えている。なお、ここで「行R1,R2」及び「列F1,F2」とは、マトリックスを構成する並びを意味するものであり、「行R1,R2」が横方向又は縦方向の何れか一方の並びであるときに、「列F1,F2」が「行R1,R2」と直交する方向の並びであることを意味する。すなわち、「行R1,R2」というときには、横方向又は縦方向の何れか一方の並び方向を意味し、「列F1,F2」というときには、横方向又は縦方向の何れか他方の並び方向を意味するものである。
【0038】
前記ユニットベース20は、枠体200と、該枠体200を両側から挟むように配置された一対の補強部材201,202とを備えている。本実施形態に係る枠体200は、金属材料を削り出して形成されたもので、図1(a)に示す如く、正面視矩形状(正方形状)に形成されている。すなわち、枠体200は、互いに間隔をあけて対向する一対の第一枠部200a,200aと、一対の第一枠部200a,200aの両端同士を連結した一対の第二枠部200b,200bとで構成されており、第一枠部200a,200a及び第二枠部200b,200bが矩形状(本実施形態においては正方形状)の領域を画定している。
【0039】
一対の補強部材201,202は、図1(a)及び図3(a)に示す如く、一方向に延びる第一帯状部201a,202aと、該第一帯状部201a,202aと交差するように延びる第二帯状部201b,202bとで構成され、正面視十字形状に形成されている。そして、各補強部材201,202は、第一帯状部201a,202aと第二帯状部201b,202bとの交点が枠体200の画定した矩形の領域の中央と一致又は略一致するように配置され、第一帯状部201a,202aの両端部が一対の第一枠部200a,200aに固定されるとともに第二帯状部201b,202bの両端部が一対の第二枠部200b,200bに固定されている。そして、図1(a)に示す如く、一方の補強部材201は、第一帯状部201a,202aと第二帯状部201b,202bとの交点上に前記支持アーム3の基端部が枢結されている。
【0040】
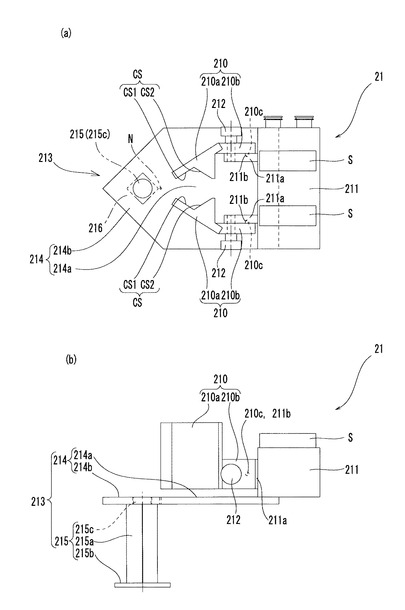
前記四つの保持手段21…は、それぞれ同一構成になっており、本実施形態においては、図4(a)及び図4(b)に示す如く、互いに対峙するように配置される一対の挟持爪210,210と、該一対の挟持爪210,210を接離させるアクチュエータ211とを備えている。すなわち、本実施形態に係る保持手段21…は、成形品を把持するグリップ手段で構成されている。
【0041】
一対の挟持爪210,210は、互いに接近することで成形品を挟み込んで保持できるように形成されている。具体的には、各挟持爪210,210は、成形品を挟み込む挟持部210aと、該挟持部210aの基端側に連設され、アクチュエータ211の後述する出力部211a,211aに連結されるアクチュエータ連結部210bとを備えている。
【0042】
本実施形態において、一対の挟持爪210,210は、外観円柱状の成形品を保持することを対象に形成されている。これに伴い、図4(a)に示す如く、挟持部210aの相手方の挟持爪210,210と対向する面(以下、保持面CSという)は、挟持部210aの延びる方向における中央部を境にした先端側の領域が先端に向かうにつれて相手方の挟持爪210,210に近づくように傾斜した傾斜面CS1で構成され、中央部を境にした基端側の領域が基端に向かうにつれて相手方の挟持爪210,210に近づくように傾斜した傾斜面CS2で構成されている。
【0043】
これにより、各挟持爪210,210の挟持部210a(保持面CS)で外観円柱状の成形品の外周を取り囲むように保持したときに、その成形品の外周が保持面CSを構成する二つの傾斜面CS1,CS2と線接触するようになっている。そして、各挟持爪210,210(挟持部210a)は、相手方の挟持爪210,210と対向する保持面CSとは反対側の面(外面)が先端に向かうにつれて相手方の挟持爪210,210側に近づくように傾斜して形成されている。これにより、一対の挟持爪210,210は、互いに対峙した状態で各挟持部210aの外面が先端に向かうにつれて相手方の挟持爪210,210に接近して先細りした態様になるように構成されている。
【0044】
前記アクチュエータ連結部210bは、挟持部210aの基端部に連設されており、アクチュエータ211(エアシリンダ211)の出力部211a,211aに重ね合わせた状態で連結される。本実施形態に係る挟持爪210,210は、保持する対象(成形品)に応じて取り替え可能になっている。すなわち、上述の如く、成形品が外観円柱状のものである場合には、上述の挟持爪210,210を採用するが、成形品が外観円柱状以外の形状のものやサイズの異なるものである場合には、挟持部210a(保持面CS)の形状やサイズが成形品の外形やサイズに対応した挟持爪210,210に交換される。
【0045】
そのため、本実施形態に係る挟持爪210,210は、アクチュエータ211の出力部211a,211aに対してアクチュエータ連結部210bがネジ部材212で螺着されるようになっている。そして、単一のネジ部材212で螺着すると挟持爪210,210がネジ部材212を中心にして回転する虞があるため、本実施形態に係る挟持爪210,210は、アクチュエータ連結部210bの出力部211a,211aとの重ね合わせ面に対し、出力部211a,211aに形成された凹部211bに嵌合可能な凸部210cが設けられている。なお、上述の如く交換される他の挟持爪210,210のアクチュエータ連結部210bは、何れも上記構成の挟持爪210,210のアクチュエータ連結部210bの態様と共通して形成される。
【0046】
本実施形態において、前記アクチュエータ211には、シリンダ内にピストンロッドが内装されたエアシリンダが採用されている。該エアシリンダ211は、シリンダが外観直方体状に形成されており、シリンダ内のピストンロッドに連結された一対の出力部211a,211aが該シリンダの側面から外方に延出している。そして、該エアシリンダ211は、シリンダに連設された接続ポートにエアホースが接続され、該エアホースからの圧縮空気の供給とその停止とを切り替えることで一対の出力部211a,211aが互いに接離するようになっている。
【0047】
そして、本実施形態に係る保持手段21…は、一対の挟持爪210,210の位置を検出するセンサS,Sが設けられており、挟持爪210,210の位置を検出することで成形品の保持状態が適正であるかどうかを判断できるようになっている。
【0048】
本実施形態に係る保持装置1は、保持手段21…が上述の如く構成されることを前提に、図4(b)に示す如く、各保持手段21…を支持する支持体213を備えている。かかる支持体213は、アクチュエータ211(シリンダ)を一方の面側で支持する支持プレート214と、該支持プレート214の他方の面に連結される案内軸215とを備えている。
【0049】
前記支持プレート214は、図4(a)、及び図4(b)に示す如く、平面視矩形状をなす取付ベース部214aと、該取付ベース部214aの一端に連設されて先細りしたベース支持部214bとで構成されており、一対の挟持爪210,210が取付ベース部214a側からベース支持部214b側に延びた配置になるように取付ベース部214aの一方の面にアクチュエータ211(エアシリンダ211)がネジ止めされている。
【0050】
前記案内軸215は、図2(a)、図2(b)、及び図3(b)に示す如く、ユニットベース20に内装された第一作動手段22及び第二作動手段23に支持されるもので、この第一作動手段22及び第二作動手段23による支持で保持手段21…及び支持プレート214を支持するようになっている。
【0051】
具体的には、案内軸215は、図4(b)に示す如く、角柱状の軸本体215aと、該軸本体215aの一端部に設けられた鍔部215bと、軸本体215aの他端部に連設された雄ネジ部215cとで構成されている。そして、該案内軸215は、図3(b)に示す如く、鍔部215bが他方の補強部材202側に位置するようにユニットベース20内の第一作動手段22及び第二作動手段23に軸本体215aが挿通された状態で雄ネジ部215c及び軸本体215aの一部がユニットベース20(枠体200)から外方に延出し、支持プレート214のベース支持部214bに螺合できるように形成されている。
【0052】
このように、支持プレート214のベース支持部214bに案内軸215の雄ネジ部215cが螺合されることにより、保持手段21…は、支持プレート214とともに案内軸215を介してユニットベース20に支持された状態になっている。なお、案内軸215は、第一作動手段22及び第二作動手段23に挿通される軸本体215aが角柱状に形成され、第一作動手段22及び第二作動手段23(後述する軸挿通領域SA:図3(a)参照)に対する挿通で自身の軸線周りでの回転が規制されるため、雄ネジ部215cに対して支持プレート214を螺合させるときに支持プレート214を雄ネジ部215cの軸線周りで回転させることは言うまでもない。
【0053】
そして、各保持手段21…は、図1(a)に示す如く、一対の挟持爪210,210の先端が他の行R1,R2及び他の列F1,F2に属する保持手段21側に向くように配置されて固定されている。すなわち、案内軸215の雄ネジ部215cに螺合させた支持プレート214は、該雄ネジ部215c周りで回転する虞があるため、図3(b)に示す如く、一対の挟持爪210,210の先端が枠体200(第一枠部200a,200a及び第二枠部200b,200b)の画定する矩形(正方形)の中央に向いた状態で、案内軸215又は案内軸215に回り止め状態で外嵌されたスペーサ(本実施形態においてはスペーサ)216と支持プレート214とに跨るように、ノックピンNが打ち込まれている。
【0054】
前記第一作動手段22及び第二作動手段23は、図1(a)、図1(b)、図2(a)、及び図2(b)に示す如く、ユニットベース20に内装されている。すなわち、第一作動手段22及び第二作動手段23は、第一枠部200a,200a及び第二枠部200b,200bが画定する矩形状の領域内に配置されている。
【0055】
前記第一作動手段22は、図3(a)に示す如く、保持手段21…の各行R1,R2(図1(a)参照)に沿って配置された一対の第一案内体220,220と、該一対の第一案内体220,220に跨るように配置された第一案内ネジ221とで構成されている。
【0056】
各第一案内体220,220は、一方向に長手をなすように形成されており、両端が保持手段21…を列F1,F2単位で行R1,R2(図1(a)参照)方向に移動(接離)させる移動範囲を超えるように長手方向の長さに設定されている。すなわち、各第一案内体220,220は、二列F1,F2の保持手段21…が最大に離間したときの最大間隔以上の長さに設定されている。
【0057】
そして、本実施形態に係る保持装置1は、枠体200が矩形状に形成されているため、一対の第一案内体220,220は、第一枠部200a,200aと平行又は略平行になるように互いに間隔をあけて枠体200内に配置されている。また、本実施形態において、一対の第一案内体220,220は、枠体200が画定する矩形状の領域の中央を基準にして対称になるように配置されている。
【0058】
そして、各第一案内体220,220は、少なくとも一端側及び他端側に各行R1,R2に沿って延び且つ一方の面側から反対にある他方の面側に貫通した第一スリット222,222が形成される。本実施形態において、各第一案内体220,220は、長手方向の中央部を除き、該中央部の両側に長手方向に延びる一対の第一スリット222,222が形成されている。かかる第一スリット222,222は、長穴状に形成してもよいが、本実施形態においては、第一案内体220,220の両端で開放するように形成されている。これにより、各第一案内体220,220は、一端側及び他端側のそれぞれに第一スリット222,222を挟んで一対の第一案内部223,223が形成されている。すなわち、各第一案内体220,220は、一端側及び他端側に長手方向と直交する方向に間隔をあけて、該長手方向に延びる一対の第一案内部223,223が形成されている。
【0059】
そして、各第一案内体220,220の中央部には、第一案内ネジ221を螺合させる第一ネジ穴224が前記第一スリット222,222の貫通方向と直交する方向に延びるように貫通して設けられている(図2(a)参照)。本実施形態において、後述する通り、第一案内ネジ221の一端側に正ネジ(第一正ネジ221a)が形成されるとともに他端側に逆ネジ(第一逆ネジ221b)が形成されるため、一方の第一案内体220の第一ネジ穴224(雌ネジ)は正ネジに形成され、他方の第一案内体220の第一ネジ穴224(雌ネジ)は逆ネジに形成されている。
【0060】
前記第一案内ネジ221は、軸線方向の中央側から一端側に向けて一方の第一案内体220に螺合する第一正ネジ221aが形成される一方、前記中央側から他端側に向けて他方の第一案内体220に螺合する第一逆ネジ221bが形成されている。また、本実施形態に係る第一案内ネジ221は、一端面上に六角穴(採番しない)が穿設されている(図1(b)参照)。
【0061】
そして、第一案内ネジ221は、第一正ネジ221aが一方の第一案内体220の第一ネジ穴224に螺合されるとともに第一逆ネジ221bが他方の第一案内体220の第一ネジ穴224に螺合された上で、第一案内体220,220と直交するように配置され、枠体200の第二枠部200b,200bに穿設された貫通穴(採番しない)が挿通されている。これにより、第一案内ネジ221は、枠体200(ユニットベース20)に両端が支持され、第二枠部200bの貫通穴から一端面上の六角穴に六角レンチを嵌合できる状態になっている。なお、一対の第一案内体220,220は、上述の如く、第一案内ネジ221(第一正ネジ221a及び第一逆ネジ221b)が螺合される際、第一案内ネジ221の両端を枠体200に支持させた状態で枠体200が画定した矩形状の領域の中央を基準に対称となる位置にまで移動されることは言うまでもない。
【0062】
前記第二作動手段23は、一対の第一案内体220,220に跨るように保持手段21…の各列F1,F2に沿って配置された一対の第二案内体230,230と、該一対の第二案内体230,230に跨るように配置された第二案内ネジ231とで構成されている。
【0063】
各第二案内体230,230は、一方向に長手をなすように形成されており、両端が保持手段21…を行R1,R2単位で列F1,F2方向に移動(接離)させる移動範囲を超えるように長手方向の長さに設定されている。すなわち、各第二案内体230,230は、二行R1,R2の保持手段21…が最大に離間したときの最大間隔以上の長さに設定されている。
【0064】
本実施形態に係る保持装置1は、枠体200が矩形状に形成されているため、一対の案内体は、第二枠部200b,200bと平行又は略平行になるように互いに間隔をあけて枠体200内に配置されている。また、本実施形態において、一対の第二案内体230,230は、枠体200が画定する矩形状の領域の中央を基準にして対称になるように配置されている。
【0065】
各第二案内体230,230は、少なくとも一端側及び他端側に各列F1,F2に沿って延び且つ一方の面側から反対にある他方の面側に貫通した第二スリット232,232が形成される。本実施形態において、各第二案内体230,230は、長手方向の中央部を除き、該中央部の両側に長手方向に延びる一対の第二スリット232,232が形成されている。かかる第二スリット232,232は、長穴状に形成してもよいが、本実施形態においては、第二案内体230,230の両端で開放するように形成されている。これにより、各第二案内体230,230は、一端側及び他端側のそれぞれに第二スリット232,232を挟んで一対の第二案内部233,233が形成されている。すなわち、各第二案内体230,230は、一端側及び他端側に長手方向と直交する方向に間隔をあけて、該長手方向に延びる一対の第二案内部233,233が形成されている。
【0066】
そして、各第二案内体230,230の中央部には、第二案内ネジ231を螺合させる第二ネジ穴234が前記第二スリット232,232の貫通方向と直交する方向に延びるように貫通して設けられている(図2(a)参照)。本実施形態において、後述する通り、第二案内ネジ231の一端側に正ネジ(第二正ネジ231a)が形成されるとともに他端側に逆ネジ(第二逆ネジ231b)が形成されるため、一方の第二案内体230の第二ネジ穴234(雌ネジ)は正ネジに形成され、他方の第二案内体230の第二ネジ穴234(雌ネジ)は逆ネジに形成されている。
【0067】
前記第二案内ネジ231は、軸線方向の中央側から一端側に向けて一方の第二案内体230,230に螺合する第二正ネジ231aが形成される一方、前記中央側から他端側に向けて他方の第二案内体230,230に螺合する第二逆ネジ231bが形成されている。また、本実施形態に係る第二案内ネジ231は、第一案内ネジ221と同様に、一端面上に六角穴(図示しない)が穿設されている。
【0068】
そして、第二案内ネジ231は、第二正ネジ231aが一方の第二案内体230の第二ネジ穴234に螺合されるとともに第二逆ネジ231bが他方の第二案内体230の第二ネジ穴234に螺合された上で、第二案内体230,230と直交するように配置され、枠体200の第一枠部200a,200aに穿設された貫通穴(採番しない)が挿通されている。これにより、第二案内ネジ231は、枠体200(ユニットベース20)に両端が支持され、一方の第一枠部200aの貫通穴から一端面上の六角穴に六角レンチを嵌合できる状態になっている。なお、一対の第二案内体230,230は、上述の如く、第二案内ネジ231(第二正ネジ231a及び第二逆ネジ231b)が螺合される際、第二案内ネジ231の両端を枠体200に支持させた状態で枠体200が画定した矩形状の領域の中央を基準に対称となる位置にまで移動されることは言うまでもない。
【0069】
そして、上記構成の第一作動手段22及び第二作動手段23は、第一案内ネジ221及び第二案内ネジ231の軸線方向の中央同士が重なるように枠体200内で重ね合わされた状態で配置されている。これにより、一対の第一案内体220,220及び一対の第二案内体230,230は、正面方向(枠体200が画定する領域が矩形状に見える方向)から見て井桁の如く態様をなしている。
【0070】
すなわち、一対の第一案内体220,220の一端側の一部が一方の第二案内体230,230の両端側の一部と重なり合うとともに、一対の第一案内体220,220の他端側の一部が他方の第二案内体230,230の両端側の一部と重なり合うことで、第一案内体220,220と第二案内体230,230との交点が四カ所に形成されている。そして、各交点において、正面方向から見て第一スリット222,222の一部と第二スリット232,232の一部とが重なりあった状態になっている。すなわち、各交点において一対の第一案内部223,223が一対の第二案内部233,233に跨るように配置された状態になり、正面方向から見て第一案内部223,223及び第二案内部233,233が矩形状(本実施形態においては略正方形状)の領域(以下、軸挿通領域という)SAを画定した状態になっている。
【0071】
そして、本実施形態に係る保持装置1は、四カ所に形成された軸挿通領域SA(四つの交点)のそれぞれに対し、保持手段21…を支持した案内軸215の軸本体215aが挿通されている。案内軸215は、上述の如く、軸本体215aが角柱状に形成されているため、軸挿通領域SAに挿通された状態で、軸本体215aの外面を構成する一対の平面と一対の第一案内部223,223とが対向し、軸本体215aの外面を構成する別の一対の平面と一対の第二案内部233,233とが対向した状態になっている。これにより、各案内軸215は、自己の軸線周りでの回転が規制されており、該案内軸215の連設された支持プレート214で支持した保持手段21…の姿勢を一定に保てるようになっている。
【0072】
図1に戻り、前記支持アーム3は、列F1,F2及び行R1,R2が異なる保持手段21…の成形品の保持中心同士を結ぶ二本の仮想線VL,VLの交点で回転中心になるように装置ユニット2のユニットベース20に対して基端部が枢結され、先端側がユニットベース20(枠体200)よりも外方に延出している。具体的に説明すると、支持アーム3は、一方向に長手をなして形成されたアーム本体30と、該アーム本体30の一端に連設されたロボットアーム連結部31とで構成されている。
【0073】
前記アーム本体30は、他端部(基端部)が一方の補強部材201(第一帯状部201a,202aと第二帯状部201b,202bとの交差点)にネジ部材Bで締結されており、そのネジ部材Bを緩めることで該ネジ部材Bを回転中心にしてユニットベース20に対して回転できるようになっている。
【0074】
これにより、本実施形態に係る装置ユニット2(ユニットベース20)は、ロボットアームRAに連結されたアーム本体30(支持アーム3)に対し、列F1,F2及び行R1,R2が異なる保持手段21…の成形品の保持中心同士を結ぶ二本の仮想線VL,VLの交点を回転中心にして回転(傾動)可能になっている。
【0075】
前記ロボットアーム連結部31は、取り付けの対象となるロボットアームRAの先端に設けられる接続構造に応じて設定されるもので、ロボットアームRAに対してネジ止めで連結されるものやワンタッチで連結できるクイック連結機構で連結されるもの等が採用される。
【0076】
本実施形態の保持装置1は、支持アーム3(ユニットベース20)の回転範囲が制限されている。すなわち、保持装置1は、支持アーム3がユニットベース20の第一枠部200a内にある範囲でユニットベース20が回転できるようになっている。
【0077】
そして、本実施形態に係る保持装置1は、ユニットベース20の姿勢を適正な状態で維持させるための位置決手段4を備えている。かかる位置決手段4は、他方の第一枠部200aの外面に連設された円弧板からなるガイド体40と、支持アーム3に取り付けられた押しネジ41とで構成されており、ガイド体40の円弧面上を押しネジ41で押圧することで支持アーム3とユニットベース20との相対位置を適正な状態で維持できるようになっている。なお、ガイド体40の円弧面は、支持アーム3(ユニットベース20)の回転中心を曲率中心にして形成されている。
【0078】
そして、本実施形態に係る保持装置1は、二行二列で平面的に配置された四つの保持手段21…が射出成形機に装備された金型の分割面(型開きした状態で成形品が残る分割面)側に向くように、支持アーム3のロボットアーム連結部31がロボットアームRAの先端部(接続構造)に対して連結される。
【0079】
次に、上記構成の保持装置1の作動について、該保持装置1を装備した射出成形品自動取出ロボットRの動作(射出成形機からの成形品の取り出し動作)と併せて説明する。なお、保持装置1の保持手段21…の配置の変更については、金型が交換されたときに行う作業であるため、後述することとし、ここでは便宜上、射出成形品自動取出ロボットRに装備された保持装置1(ロボットアームRAに連結済みの保持装置1)は、各保持手段21…の配置が射出成形機の型の配置に対応した状態になっていることとする。
【0080】
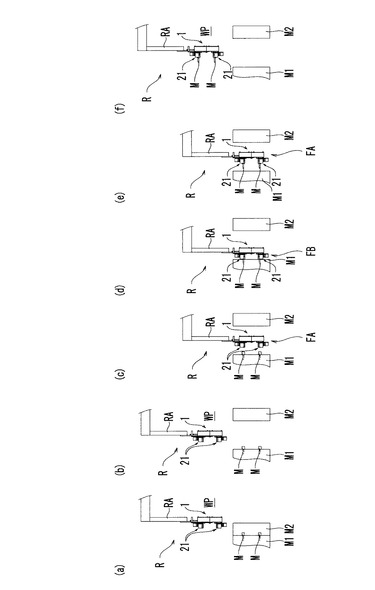
まず、成形品M…を成形するに当り、射出成形機は、図5(a)に示す如く、装備された二つの金型M1,M2を接近させて互いの分割面を当接させた後(型締めした後)、射出ユニットのノズルを金型M1,M2のスプルゥに接続し、金型M1,M2間に形成された成形空間内に樹脂を射出する。このとき、射出成形品自動取出ロボットRは、二つの金型M1,M2が離間したとき(型開きしたとき)に、保持装置1を金型M1,M2間に挿入できる位置(待機位置WP)で待機させている。
【0081】
そして、図5(b)に示す如く、射出成形機が二つの金型M1,M2を離間させる(型開きする)と、金型M2のスプルゥやランナー内で硬化した樹脂が成形品M…から分離され、他方の金型M2の分割面上にあるスプルゥ(開口)から等距離になるように、四つの成形品M…が一方の金型M1の分割面上でマトリックス状に配置された状態に残る。
【0082】
そうすると、射出成形品自動取出ロボットRは、ロボットアームRAを動作させ、図5(c)に示す如く、保持装置1を離間した金型M1,M2間の成形品取出可能位置FAに配置する。すなわち、射出成形品自動取出ロボットRは、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点(図1(a)参照)が他方の金型M2の分割面上にあるスプルゥ(開口)と一致する位置(成形品取出可能位置FA)に保持装置1を配置する。また、射出成形品自動取出ロボットRは、各保持手段21…の一対の挟持爪210,210を離間させ、一対の挟持爪210,210間に成形品M…を配置できる状態にする。
【0083】
しかる後、射出成形品自動取出ロボットRは、図5(d)に示す如く、ロボットアームRAを動作させて保持装置1を成形品M…の残る金型M1に向けて前進させ、分割面上に残る各成形品M…が各保持手段21…の挟持爪210,210間に位置する成形品取出位置FBに配置する。
【0084】
そして、射出成形品自動取出ロボットRは、保持装置1が成形品取出位置FBにある状態で、各保持手段21…の一対の挟持爪210,210を閉じて(接近させて)該挟持爪210,210で成形品M…を把持した後、図5(e)に示す如く、ロボットアームRAを動作させて保持装置1を一方の金型M1から遠ざかるように後進させる。なお、射出成形品自動取出ロボットRは、上述の如く、金型M1,M2間(成形品取出可能位置FAと成形品取出位置FBとの間)で保持装置1を前進及び後進させるとき、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点が他方の金型M2の分割面上にあるスプルゥ(開口)と一致又は略一致するように保持装置1を移動させるようになっている。
【0085】
このように、保持手段21…(一対の挟持爪210,210)が成形品M…を把持した状態で保持装置1を金型M1,M2間で後進させることで、成形品M…が金型M1から分離することになるため、射出成形品自動取出ロボットRは、引き続きロボットハンドを動作させ、図5(f)に示す如く、保持装置1を金型M1,M2間から外側に移動させる。このように保持装置1が金型M1,M2間から外側に出ると、射出成形装置は型締めして次の成形工程に入ることになる。
【0086】
そして、射出成形品自動取出ロボットRは、金型M1,M2間から外側に出た保持装置1を所定の集積位置にまで移動させた後、各保持手段21…の一対の挟持爪210,210を離間させて成形品M…の保持を解除し、成形品M…を集積位置に落下させる。その後、射出成形品自動取出ロボットRは、保持装置1を再び待機位置WPに戻し、図5(a)に示す如く、次の成形工程における型開きが行われるまで保持装置1を待機位置WPで待機させ、上述の如く、射出成形機の型開き及び型締めの状況に応じてロボットアームRA及び保持装置1を動作させる。このように、射出成形品自動取出ロボットRを射出成形機に付設することで、射出成形機による成形品M…の成形と、成形された成形品M…の取り出しと連動させて繰り返し連続的に行うことができる。
【0087】
そして、異なる成形品M…を成形する場合、その成形品M…に対応した型が形成された金型M1,M2に交換される。そして、交換される金型M1,M2の型の形態(成形される成形品M…の形態)が変更前の金型M1,M2の型の形態(成形される成形品M…の形態)と異なり、先の成形品M…の取り出しに用いられていた保持手段21…の挟持爪210,210で変更後の成形品M…を挟持できない場合には、その成形品M…の形態に応じた挟持爪210,210に交換する。
【0088】
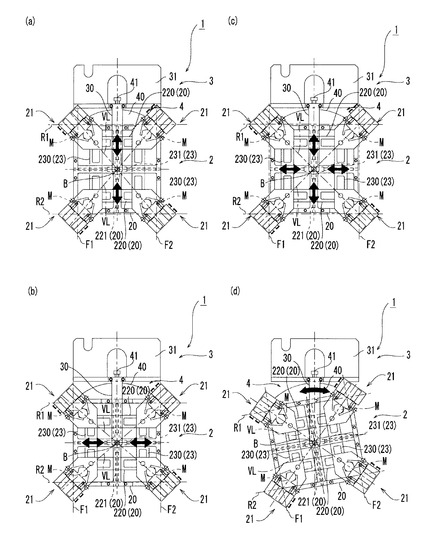
また、交換される金型M1,M2の型の配置が変更前の金型M1,M2の型の配置と異なる場合には、図6(a)〜図6(c)に示す如く、第一作動手段22で同じ行にある二つの保持手段21…と別の行にある二つの保持手段21…とを接離させ、また、第二作動手段23で同じ列にある二つの保持手段21…と別の列にある二つの保持手段21…とを接離させることで、四つの保持手段21…の配置を金型M1,M2の型の配置に対応するように調整する。
【0089】
より具体的には、六角レンチを用いて第一案内ネジ221及び第二案内ネジ231の少なくとも何れか一方を回転させる。第一案内ネジ221に対して操作を行った場合、図6(a)に示す如く、一対の第一案内体220,220の両方が第一案内ネジ221に沿って移動し、互いに接離することになる。すなわち、一方の第一案内体220,220に第一案内ネジ221の第一正ネジ221aが螺合されるとともに他方の第一案内体220,220に第一案内ネジ221の第一逆ネジ221bが螺合されているため、第一案内ネジ221を回転させると、一対の第一案内体220,220が第一案内ネジ221に沿って逆方向に移動し、互いに接離することになる。そうすると、軸挿通領域SAに挿通された案内軸215は、第一案内体220,220(第一スリット222,222の両側にある実体のある部分(第一案内部223,223)の何れか一方)に押されて該第一案内体220,220と同一方向に移動することになり、案内軸215が連設された支持プレート214に支持された保持手段21…も同様の態様で移動し、異なる行R1,R2の保持手段21…同士が列F1,F2方向で接離することになる。
【0090】
これに対し、第二案内ネジ231に対して操作を行った場合、図6(b)に示す如く、一対の第二案内体230,230の両方が第二案内ネジ231に沿って移動し、互いに接離することになる。すなわち、一方の第二案内体230,230に第二案内ネジ231の第二正ネジ231aが螺合されるとともに他方の第二案内体230,230に第二案内ネジ231の第二逆ネジ231bが螺合されているため、第二案内ネジ231を回転させると、一対の第二案内体230,230が第二案内ネジ231に沿って逆方向に移動し、互いに接離することになる。そうすると、軸挿通領域SAに挿通された案内軸215は、第二案内体230,230(第二スリット232,232の両側にある実体のある部分(第二案内部233,233)の何れか一方)に押されて該第二案内体230,230と同一方向に移動することになり、案内軸215が連設された支持プレート214に支持された保持手段21…も同様の態様で移動し、異なる列F1,F2の保持手段21…同士が行R1,R2方向で接離することになる。
【0091】
そして、図6(c)に示す如く、各行R1,R2の保持手段21…を列F1,F2方向に接離させ、且つ各列F1,F2の保持手段21…を行R1,R2方向に接離させると、四つの保持手段21…は、枠体200が画定する矩形状の領域の中央を中心にして放射状に移動した状態になるが、各保持手段21…の一対の挟持爪210,210は、先端が他の行R1,R1及び他の列F1,F2に属する保持手段21…側に向くように配置されるとともに、対向する相手方の挟持爪210,210と対向する面とは反対側の面が先端に向かうにつれて相手方の挟持爪210,210側に近づくように形成され、また、支持プレート214のベース支持部214bが先細りに形成されているため、隣り合う保持手段21…の挟持爪210,210同士の干渉及び隣り合う保持手段21…を支持する支持プレート214同士の干渉を最大限抑えることができる。従って、隣り合う保持手段21…同士を最大限接近させることができるため、金型M1,M2の分割面上に形成される四つの型の間隔が狭くても各保持手段21…を各型(成形品M…)の配置に対応させることができる。
【0092】
本実施形態において、上述の如く、一対の第一案内体220,220が枠体200の画定する矩形状の領域の中央を基準に対称に配置されるとともに、一対の第二案内体230,230が枠体200の画定する矩形状の領域の中央を基準に対称に配置され、また、第一案内ネジ221の操作で一対の第一案内体220,220のそれぞれが同一の移動量で相対的に移動し、第二案内ネジ231の操作で一対の第二案内体230,230のそれぞれが同一の移動量で相対的に移動するように構成されているため、異なる行R1,R2の保持手段21…同士を接離させても、異なる列F1,F2の保持手段21…同士を接離させても、四つの保持手段21…は二行二列でマトリックス状に配置された状態で維持し、また、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点が一定位置で維持することになる。
【0093】
そして、各保持手段21…を行R1,R2方向及び列F1,F2方向の少なくとも何れか一方に移動させても、金型M1,M2の分割面に形成された四つの型の配置に対して四つの保持手段21…の配置が傾いている(ユニットベース20の回転中心(ネジ部材B)の周方向にずれている)場合、図6(d)に示す如く、ユニットベース20を回転中心周りで回転させ、各保持手段21…を型の配置に合わせた後、位置決手段4でユニットベース20の位置決めを行う。
【0094】
これにより、型開きした金型M1,M2間に保持装置1が位置した状態で各保持手段21…(成形品M…の保持位置)が金型M1,M2の分割面上に形成された四つの型(分割面上に残る四つの成形品M…)の配置に対応した状態にすることができる。
【0095】
そして、本実施形態に係る保持装置1は、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点が一定位置で維持するため、上述の如く、保持手段21…の配置を変更しても、ロボットアームRAの動作に対する設定変更を行う必要はない。
【0096】
すなわち、射出成形機は、樹脂を射出する射出ユニットが二つの金型M1,M2を接離させる方向と一致する方向にのみ移動可能に設けられ、射出ユニットを金型M1,M2側に移動させることで射出ユニットのノズルが金型M2の接続口に対して一定位置で接続されるように構成され、また、射出成形機に装備される金型M1,M2は、分割面上に形成される四つの型がスプルゥの開口を起点にして等距離の位置に形成されるため、保持装置1の成形品取出可能位置FA及び成形品取出位置FBを、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点と金型M2の分割面上に形成されるスプルゥの開口とが一致する位置に設定しておけば、各保持手段21…の配置を変更してもロボットアームRAの動作を金型M1,M2の変更前と同じ動作にしても各保持手段21…を成形品M…の配置に対応させた状態にすることができ、成形品M…の取り出しが可能になる。
【0097】
以上のように、本実施形態に係る保持装置1によれば、射出成形品自動取出ロボットRのロボットアームRAに対して直接的又は間接的に連結されるユニットベース20と、該ユニットベース20上に平面的に二行二列で配置された四つの保持手段21…とを有する装置ユニット2を一つ備え、該装置ユニット2は、異なる行R1,R2の保持手段21…を列F1,F2方向で相対的に接離させる第一作動手段22と、異なる列F1,F2の保持手段21…を行R1,R2方向で相対的に接離させる第二作動手段23とを備えているため、二列の間隔(各列F1,F2にある保持手段21…同士の間隔)及び二行の間隔(各行R1,R2にある保持手段21…同士の間隔)を独立して変更することができる。
【0098】
従って、本実施形態に係る保持装置1は、成形品M…を成形する四つの型が二行二列でマトリックス状に配置された金型M1,M2を用いて射出成形品M…を成形するに当り、型同士の間隔を異にする金型M1,M2に交換されても、該金型M1,M2で成形された成形品M…のそれぞれを確実に保持することができるという優れた効果を奏し得る。
【0099】
また、各保持手段21…は、互いに接離可能に設けられた一対の挟持爪210,210を備え、各保持手段21…の一対の挟持爪210,210は、先端が他の行及び他の列に属する保持手段21…側に向くように配置されるとともに、対向する相手方の挟持爪210,210と対向する面とは反対側の面が先端に向かうにつれて相手方の挟持爪210,210側に近づくように傾斜して形成されているため、隣り合う保持手段21…同士の干渉を抑えることができる。これにより、金型M1,M2の分割面上に形成される四つの型の間隔が狭くても各保持手段21…を各型(成形品M…)の配置に対応させることができ、その型で成形された成形品M…を各保持手段21…で保持させることができる。
【0100】
さらに、前記第一作動手段22は、各行R1,R2に沿って配置された一対の第一案内体220,220と、該一対の第一案内体220,220に跨るように配置された第一案内ネジ221とで構成され、各第一案内体220,220は、少なくとも一端側及び他端側に各行R1,R2に沿って延び且つ一方の面側から反対にある他方の面側に貫通した第一スリット222,222が形成され、第一案内ネジ221は、軸線方向の中央側から一端側に向けて一方の第一案内体220に螺合する第一正ネジ221aが形成される一方、前記中央側から他端側に向けて他方の第一案内体220に螺合する第一逆ネジ221bが形成され、前記第二作動手段23は、一対の第一案内体220,220に跨るように各列F1,F2に沿って配置された一対の第二案内体230,230と、該一対の第二案内体230,230に跨るように配置される第二案内ネジ231とで構成され、各第二案内体230,230は、少なくとも一端側及び他端側に各列F1,F2に沿って延び且つ一方の面側から反対にある他方の面側に貫通した第二スリット232,232が形成され、第二案内ネジ231は、軸線方向の中央側から一端側に向けて一方の第二案内体230に螺合する第二正ネジ231aが形成される一方、前記中央側から他端側に向けて他方の第二案内体230に螺合する第二逆ネジ231bが形成され、各保持手段21…は、第一スリット222,222と第二スリット232,232との重複領域に挿入される案内軸215が間接的に連設されているため、各保持手段21…を行R1,R2方向及び列F1,F2方向に精度よく移動させることができる。
【0101】
また、本実施形態に係る保持装置1は、金型M1の分割面上で二行二列のマトリックス状に配置された四つの成形品M…を取り出すことを前提に、前記ユニットベース20に基端部が枢結された支持アーム3をさらに備え、該支持アーム3は、先端側がロボットアームRAに連結可能に構成されているため、四つの保持手段21…の行R1,R2方向及び列F1,F2方向の間隔を維持しつつ四つの保持手段21…を一体的にして回転させることができる。従って、交換後の金型の型の配置が交換前の金型M1,M2の型の配置に対して傾いた配置になっても、四つの成形品M…を確実に保持することができる。
【0102】
特に、前記支持アーム3は、行R1,R2及び列F1,F2が異なる保持手段21…の成形品Mの保持中心同士を結ぶ二本の仮想線VL,VLの交点が回転中心になるように基端部がユニットベース20に枢結されているため、型の配置の異なる金型に交換されても、ロボットアームRAのティーチング(動作設定)を行うことなく、保持手段21…の行R1,R2単位又は列F1,F2単位での配置の変更、或いは装置ユニット2の回転による保持手段21…全体の配置の変更だけで成形品M…を各保持手段21…で保持できる状態にできる。
【0103】
なお、本発明の射出成形品自動取出ロボット用の成形品保持装置は、上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で適宜変更を加え得ることは勿論のことである。
【0104】
上記実施形態において、装置ユニット2(ユニットベース20)に支持アーム3を枢結させ、該支持アーム3(ロボットアーム連結部31)をロボットアームRAに連結するようにしたが、これに限定されるものではなく、例えば、装置ユニット2(例えば、ユニットベース20)にロボットアーム連結部31を設け、ロボットアームRAに装置ユニット2を直接連結するようにしてもよい。但し、保持手段21…の配置を調整するに当たって、装置ユニット2を回転可能にすることが好ましいことは言うまでもない。
【0105】
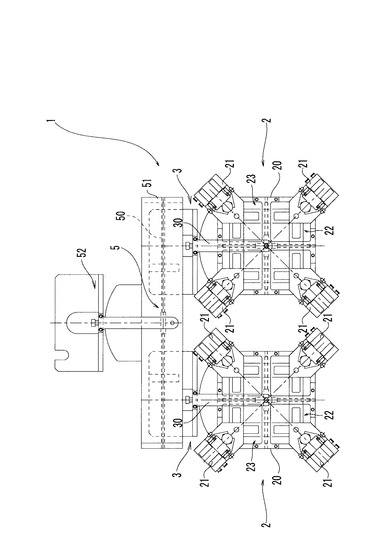
上記実施形態において、射出成形機で四つの成形品M…を成形し、その成形品M…が金型M1,M2の分割面上で二行二列のマトリックス状に配置された状態で残ることを前提に、装置ユニット2を一つ設けるようにしたが、これに限定されるものではなく、例えば、射出成形機で四の倍数の数の成形品M…を成形し、その成形品M…が金型M1,M2の分割面上で二行多列のマトリックス状に配置された状態で残る場合、図7に示す如く、保持手段21…の数が成形品M…の数と対応するように四つの保持手段21…を備えた装置ユニット2を複数設け、複数の保持手段21…の配置が二行多列になるように複数の装置ユニット2…を横並びに配置したものであってもよい。
【0106】
この場合、隣り合う装置ユニット2,2を相対的に接離させるためのユニット用作動手段5を設けることが好ましい。かかるユニット用作動手段5は、例えば、一端側に正ネジが形成される一方、他端側に逆ネジが形成された両ネジボルト50を採用し、その両ネジボルト50の一端側を一方の装置ユニット2(例えば枠体200)に螺合させ、他端側を他方の装置ユニット2(例えば、枠体200)に螺合させるようにしてもよい。このようにすれば、両ネジボルト50を軸線周りで回転させることで隣り合う二つの装置ユニット2が両ネジボルト50に沿って接離することになるため、異なる装置ユニット2の保持手段21…同士の間隔を調整することができる。
【0107】
また、装置ユニット2同士を直接両ネジボルト50で連結するものに限定されるものではなく、例えば、図7に示す如く、装置ユニット2のそれぞれに支持アーム3を枢結し、一方の装置ユニット2に枢結された支持アーム3に両ネジボルト50の一端側を螺合させ、他方の装置ユニット2に枢結された支持アーム3に両ネジボルト50の他端側を螺合させるようにしてもよい。
【0108】
そして、装置ユニット2同士を直接両ネジボルト50で連結する場合、及び装置ユニット2に枢結した支持アーム3同士を両ネジボルト50で連結する場合の何れにおいても、両ネジボルト50を支持し、装置ユニット2又は支持アーム3の両ネジボルト50周りの回り止めが可能なベース51を設けることが好ましい。また、前記ベース51を設ける場合、該ベース51に支持アーム52を枢結し、その支持アーム52をロボットアームRAに連結するようにしてもよい。
【0109】
そして、上記実施形態において、仮装線VL,VLの交点上で支持アーム3の基端部を枢結したが、これに限定されるものではなく、例えば、ベース51と装置ユニット2とを連結する支持アーム3を設ける場合、仮装線VL,VLの交点以外の箇所(装置ユニット2の何れかの箇所)に支持アーム3の基端部を枢結してもよい。また、上述の如く、装置ユニット2を支持するベース51を設け、該ベース51に支持アーム52の基端部を枢結する場合も、仮装線VL,VLの交点以外の箇所(装置ユニット2の何れかの箇所)に支持アーム3の基端部を枢結してもよい。但し、支持アーム3,52を設ける場合、上記実施形態と同様に、仮装線VL,VLの交点上で支持アーム3の基端部を枢結することが好ましいことは言うまでもない。
【0110】
上記実施形態において、一対の第一案内体220,220の両方を連動させて移動させるべく、第一正ネジ221a及び第一逆ネジ221bの形成された第一案内ネジ221を設けたが、これに限定されるものではなく、例えば、各第一案内体220,220を独立して移動可能に構成してもよい。すなわち、枠体200の第一枠部200a,200aに貫通状態でボルトを螺合させ、枠体200内にあるボルトの先端を第一案内体220,220に対して該ボルトの軸線回りで回転自在に連結してもよい。このようにすれば、ボルトを回転させることで該ボルトに連結された第一案内体220,220がボルトの軸線方向に移動することになるため、一対の案内体を相対的に接離させることができる。但し、このようにすれば、保持手段21…を移動させたときに、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点が移動することになるため、ロボットアームRAの動作設定を行う必要があることから、上記実施形態の構成にすることが好ましいことは言うまでもない。
【0111】
上記実施形態において、一対の第二案内体230,230の両方を連動させて移動させるべく、第二正ネジ231a及び第二逆ネジ231bの形成された第二案内ネジ231を設けたが、これに限定されるものではなく、例えば、各第二案内体230,230を独立して移動可能に構成してもよい。すなわち、枠体200の第二枠部200b,200bに貫通状態でボルトを螺合させ、枠体200内にあるボルトの先端を第二案内体230,230に対して該ボルトの軸線回りで回転自在に連結してもよい。
【0112】
このようにすれば、ボルトを回転させることで該ボルトに連結された第二案内体230,230がボルトの軸線方向に移動することになるため、一対の案内体を相対的に接離させることができる。但し、このようにすれば、保持手段21…を移動させたときに、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点が移動することになるため、ロボットアームRAの動作設定を行う必要があることから、上記実施形態と同様の構成にすることが好ましいことは言うまでもない。
【0113】
上記実施形態において、第一案内ネジ221で一対の第一案内体220,220を接離させるようにしたが、第一作動手段22はこれに限定されるものではなく、例えば、各一案内体に対して該第一案内体220,220と直交する方向に延びる別個独立したラックを取り付け、各ラックに対して噛合する歯車を設けるとともに、各ラックに噛合する二つの歯車の回転方向が逆方向になるように、該二つの歯車の間に偶数個の伝達歯車を設けるようにしてもよい。このようにすれば、何れかの歯車を回転させることで、各ラックに噛合する二つの歯車が逆方向に回転して各ラックを逆方向(相反する方向)に移動させることができるため、上記実施形態と同様の態様で一対の第一案内体220,220(異なる列F1,F2の保持手段21…)同士を接離させることができる。
【0114】
また、上記実施形態において、第二案内ネジ231で一対の第二案内体230,230を接離させるようにしたが、第二作動手段23はこれに限定されるものではなく、例えば、第一作動手段22と同様に、各一案内体に対して該第二案内体230,230と直交する方向に延びる別個独立したラックを取り付け、各ラックに対して噛合する歯車を設けるとともに、各ラックに噛合する二つの歯車の回転方向が逆方向になるように、該二つの歯車の間に偶数個の伝達歯車を設けるようにしてもよい。このようにすれば、何れかの歯車を回転させることで、各ラックに噛合する二つの歯車が逆方向に回転して各ラックを逆方向(相反する方向)に移動させることができるため、上記実施形態と同様の態様で一対の第二案内体230,230(異なる行R1,R2の保持手段21…)を接離させることができる。
【0115】
上記実施形態において、第一案内体220の長手方向の両側に一対の第一スリット222を設け、第二案内体230の長手方向の両側に一対の第二スリット232を設けたが、これに限定されるものではなく、例えば、第一案内体220の長手方向の一端側から他端側にかけて長手をなす長穴を第一スリット222として形成し、第二案内体230の長手方向の一端側から他端側にかけて長手をなす長穴を第二スリット232として形成してもよい。また、第一案内体220又は第二案内体230の何れか一方に対し、一端側から他端側に長手をなす長穴を形成して第一スリット222又は第二スリット232とし、第一案内体220又は第二案内体230の何れか他方に対し、長手方向の両側に一対の長穴又は溝を形成して、一対の第一スリット222又は一対の第二スリット232としてもよい。何れの場合においても、第一スリット222及び第二スリット232の重なる軸挿通領域SAに案内軸215(軸本体215a)を挿通すれば、第一作動手段22及び第二作動手段23を操作することで、上記実施形態と同様に保持手段21を行方向及び列方向に移動させることができる。
【0116】
上記実施形態において、支持プレート214を介して案内軸215を保持手段21に連設するようにしたが、これに限定されるものではなく、例えば、保持手段21のアクチュエータ211に案内軸215を直接連設するようにしても勿論よい。
【0117】
また、上記実施形態において、保持手段21として互いに接離可能な一対の挟持爪210,210を備えたグリップ手段を採用したが、これに限定されるものではなく、例えば、保持手段21は、成形品を吸引可能な吸着パッドで構成してもよい。
【符号の説明】
【0118】
1…保持装置、2…装置ユニット、3…支持アーム、4…位置決手段、5…ユニット用作動手段、20…ユニットベース、21…保持手段、22…第一作動手段、23…第二作動手段、30…アーム本体、31…ロボットアーム連結部、40…ガイド体、41…押しネジ、50…両ネジボルト、51…ベース、52…支持アーム、200…枠体、200a…第一枠部、200b…第二枠部、201,202…補強部材、201a,202a…第一帯状部、201b,202b…第二帯状部、210…挟持爪、210a…挟持部、210b…アクチュエータ連結部、210c…凸部、211…エアシリンダ(アクチュエータ)、211a…出力部、211b…凹部、212…ネジ部材、213…支持体、214…支持プレート、214a…取付ベース部、214b…ベース支持部、215…案内軸、215a…軸本体、215b…鍔部、215c…雄ネジ部、220…第一案内体、221…第一案内ネジ、221a…第一正ネジ、221b…第一逆ネジ、222…第一スリット、223…第一案内部、224…第一ネジ穴、230…第二案内体、231…第二案内ネジ、231a…第二正ネジ、231b…第二逆ネジ、232…第二スリット、233…第二案内部、234…第二ネジ穴、B…ネジ部材、N…ノックピン、CS…保持面、CS1,CS2…傾斜面、S…センサ、F1,F2…列、R1,R2…行、SA…軸挿通領域、VL…仮想線、FA…成形品取出可能位置、FB…成形品取出位置、WP…待機位置、M…成形品、M1,M2…金型、R…射出成形品自動取出ロボット、RA…ロボットアーム
【技術分野】
【0001】
本発明は、射出成形機に装備された金型を型開きしたときに、金型間にある射出成形品を取り出す射出成形品自動取出ロボット用の成形品保持装置に関する。
【背景技術】
【0002】
これまで、各種製品や部品等を成形する成形工法として種々のものが提案されてきたが、近年においては、成形性能(例えば、成形精度や成形サイクル等)が他の成形工法よりも優れるとして、射出成形が広く一般に普及している。
【0003】
射出成形用の成形機(射出成形機)は、少なくとも二つの金型が互いに対峙するように配置されて装備される。二つの金型の少なくとも何れか一方は、相手方の金型と対向する面(以下、分割面という)に成形対象となる製品や部品の外形と対応した型が形成される。そして、何れか他方の金型に対して樹脂を充填するためのスプルゥが分割面と直交方向に延びて該分割面上で開口するように形成されるとともに、該スプルゥと型とを繋ぐランナーが溝状をなして分割面上に形成される。これにより、二つの金型は、互いに重ね合わさった状態で、分割面間に成形対象(部品)の外形に即した成形空間を形成し、スプルゥ及びランナーを介して成形空間に樹脂を供給できるようになっている。
【0004】
そして、一回の成形サイクルで複数個の成形品を成形する場合、金型の分割面上に複数の型が形成される。この場合、各型(成形空間)に対して均等に樹脂を充填できるように、複数の型は、それぞれ分割面上のスプルゥ(開口)から等距離になるように配置される。具体的には、金型の分割面上に四つ又は四の倍数の数の型が二行多列になるように配置され、その型を四つ一組にすることを前提に、スプルゥは四つの型が配置される行及び列で画定される矩形領域の中央で開口するように形成され、四つの型とスプルゥとを繋ぐ四つのランナーはスプルゥの開口を中心にして放射状に延びてそれぞれ同一又は略同一の長さになるよう形成される。これにより、スプルゥから供給される樹脂は、各ランナーを介して各型に均等に充填される。
【0005】
そして、射出成形機は、上述のように金型が形成されることを前提に、成形品を成形する際に二つの金型を接近させて互いの分割面を当接させる(いわゆる、型締めする)一方、成形した成形品を取り出す際に二つの金型を離間させる(いわゆる、型開きする)ようになっている。これにより、射出成形機は、金型を型開きしたときに、スプルゥやランナー内で硬化した樹脂が四つの成形品から分離され、一方の金型の分割面上に成形品が残った状態(成形品のみを取り出せる状態)になるように構成されている。
【0006】
ところで、成形品の量産に伴って生産サイクルの短縮化が要求されるため、通常、射出成形機に対して成形品を自動的に取り出す成形品自動取出装置が設けられる。
【0007】
成形品自動取出装置には、金型の分割面上に残る成形品を外方に押し出すプッシャを備えたエジェクタ機構が採用されることが多いが、この種の成形品自動取出装置は、単にプッシャで成形品を押し出して下方に落下させるだけであるため、成形品を所定の位置に集積するにはコンベア等を配置しなければならない。また、この種の成形品自動取出装置は、金型と隣接するように配置して該金型にプッシャを挿通させなければならないため、射出成形機のサイズや、金型の型の数、配置等の制限を受けてしまう。
【0008】
そのため、成形品の取り出しと成形品の移送とを行うことのできる射出成形品自動取出ロボットが成形品自動取出装置として射出成形機に並設されることがある。
【0009】
かかる射出成形品自動取出ロボットは、上下方向(Y軸方向)、横方向(X軸方向)及び前後方向(Z軸方向)に移動可能なロボットアームと、該ロボットアームの先端に取り付けられる成形品保持装置(以下、保持装置という)とで構成されている(例えば、特許文献1参照)。
【0010】
前記保持装置は、図8(a)及び図8(b)に示す如く、支持フレーム501と、該支持フレーム501に取り付けられた保持手段502…とを備えている。前記支持フレーム501は、保持手段502…が配置される板状のフレーム本体501aと、該フレーム本体501aに連設され、ロボットアーム(図示しない)の先端部(接続構造)に対して着脱可能な連結部501bとを備えている。
【0011】
前記保持手段502…は、金型の分割面上の型の配置に対応するように配置される。すなわち、上述の如く、金型の分割面上に四つ又は四の倍数の数の型が二行多列になるように配置される場合、四つ又は四の倍数の数の保持手段502…が二行多列のマトリックス状の配置になるようにフレーム本体501aに固定される。
【0012】
各保持手段502…は、例えば、互いに対峙するように配置された一対の挟持体503,503と、フレーム本体501aの一方の面上に固定され、前記一対の挟持体503,503を互いに接離させるアクチュエータ504(例えば、エアシリンダや、電動シリンダ等)とを備えており、アクチュエータ504の作動で一対の挟持体503,503を接離させることで成形品M’に対する保持とその解除とを行うようになっている。
【0013】
これにより、上記構成の射出成形品自動取出ロボットは、金型間にある各成形品(金型の分割面上に残る成形品)M’を各保持手段502…(一対の挟持体503,503)に
保持させた状態でロボットアームを動作させることで、保持装置500とともに成形品M’を所定の位置まで移送することができ、該所定の位置で保持手段502…による成形品M’の保持を解除することで成形品M’を落下させて所望の集積位置に集積できるようになっている。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2000−326374号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
ところで、射出成形機は、成形の対象(成形品M’)を変更すべく金型が交換されるこ
とがあるが、型の配置が異なる金型(隣り合う型同士の間隔が交換前の金型と異なる別の金型)に交換する場合、射出成形品自動取出ロボットの保持装置500も新たな金型に対応するものに交換しなければならない。すなわち、保持装置500の四つ又は四の倍数の数の保持手段502…は、特定の金型の四つの型に対応するように配置されるため、型の配置が異なる金型に交換した場合、各保持手段502…の配置が交換後の金型の型の配置に対応した保持装置に交換しなければならなかった。
【0016】
かかる保持装置500の交換作業は、ロボットアームに対する保持装置500の連結作業及び連結解除作業を行うだけでなく、保持手段502…を作動させるアクチュエータ504へのエネルギー供給ライン(例えば、圧縮エアをエネルギーとする場合には、エアホース)の接続作業やその接続を解除するための作業を必要とするため、非常に繁雑である。
【0017】
また、このように保持装置500を交換した場合、交換後の保持装置500(保持手段502)と金型(型)との位置合わせするために、煩雑なロボットアームのティーチング作業が必要となる。そのため、従来の保持装置500を採用した場合、金型の交換に伴う付随的な作業が多くなってラインを止める時間が長くなり、生産効率を低下させるといった問題があった。
【0018】
そこで、本発明は、斯かる実情に鑑み、射出成形品を成形する四つ又は四の倍数の数の型が二行多列でマトリックス状に配置された金型を用いて射出成形品を成形することを前提に、型同士の間隔を異にする金型に交換した際、煩雑な作業を行うことなく交換後の金型で成形された成形品を保持できる状態にすることのできる射出成形品自動取出ロボット用の成形品保持装置を提供することを課題とする。
【課題を解決するための手段】
【0019】
本発明に係る射出成形品自動取出ロボット用の成形品保持装置は、射出成形機に対して交換可能に装備された少なくとも二つの金型の分割面同士が離間した状態で、何れか一つの金型の分割面から対向する金型に向けて突出し、且つ該分割面上で二行多列のマトリックス状に配置された四つ又は四の倍数の数の成形品を取り出すべく、成形品を保持可能な保持手段が金型上の成形品の配置に対応して二行多列で配置される射出成形品自動取出ロボット用の成形品保持装置であって、射出成形品自動取出ロボットのロボットアームに対して直接的又は間接的に連結されるユニットベースと、該ユニットベース上に平面的に二行二列で配置された四つの保持手段とを有する装置ユニットを少なくとも一つ備え、装置ユニットは、異なる行の保持手段同士を列方向で相対的に接離させる第一作動手段と、異なる列の保持手段同士を行方向で相対的に接離させる第二作動手段とを備えていることを特徴とする。ここで「行」及び「列」とは、マトリックスを構成する並びを意味するものであり、「行」が横方向又は縦方向の何れか一方の並びであるときに、「列」が「行」と直交する方向の並びであることを意味する。すなわち、「行」というときには、横方向又は縦方向の何れか一方の並び方向を意味し、「列」というときには、横方向又は縦方向の何れか他方の並び方向を意味するものである。
【0020】
上記構成の射出成形品自動取出ロボット用の成形品保持装置は、第一作動手段で同じ行にある二つの保持手段と別の行にある二つの保持手段とを接離させることができるため、四つの保持手段を二行二列のマトリックス状の配置で維持させつつ、二行の間隔(異なる行の保持手段同士の間隔)を二列の間隔(異なる列の保持手段同士の間隔)よりも広い間隔にしたり、二行の間隔(異なる行の保持手段同士の間隔)を二列の間隔(異なる列の保持手段同士の間隔)よりも狭い間隔にしたりすることができる。
【0021】
また、上記構成の射出成形品自動取出ロボット用の成形品保持装置は、第二作動手段で同じ列にある二つの保持手段と別の列にある二つの保持手段とを接離させることができるため、四つの保持手段を二行二列のマトリックス状の配置を維持させつつ、二列の間隔(異なる列の保持手段同士の間隔)を二行の間隔(異なる行の保持手段同士の間隔)よりも広い間隔にしたり、二列の間隔(異なる列の保持手段同士の間隔)を二行の間隔(異なる行の保持手段同士の間隔)よりも狭い間隔にしたりすることができる。すなわち、上記構成の射出成形品自動取出ロボット用の成形品保持装置は、第二作動手段に対する操作においても、四つの保持手段を二行二列のマトリックス状の配置で維持させつつ、二行の間隔(異なる行の保持手段同士の間隔)を二列の間隔(異なる列の保持手段同士の間隔)よりも広い間隔にしたり、二行の間隔(異なる行の保持手段同士の間隔)を二列の間隔(異なる列の保持手段同士の間隔)よりも狭い間隔にしたりすることができる。
【0022】
さらに、上記構成の射出成形品自動取出ロボット用の成形品保持装置は、第一作動手段及び第二作動手段の両方を操作することで、第一作動手段で同じ行にある二つの保持手段と別の行にある二つの保持手段とを接離させるとともに、第二作動手段で同じ列にある二つの保持手段と別の列にある二つの保持手段とを接離させることができため、四つの保持手段を二行二列のマトリックス状の配置で維持させつつ、二列の間隔(異なる列の保持手段同士の間隔)と二行の間隔(異なる行の保持手段同士の間隔)とを同じ間隔にすることもできる。
【0023】
従って、マトリックス状に配置される四つの保持手段の配置を金型の型で成形されて一方の金型の分割面上に残る四つの成形品の配置に対応させることができる。これにより、射出成形機に装備される金型が交換されても、当該成形品保持装置を交換することなく、交換後の金型で成形された成形品を適正に保持することができる。また、装置ユニットを二つ以上設け、全ての装置ユニットの保持手段が整列して二行をなすように、二つ以上の装置ユニットを横並びに配置するとともに、隣り合う装置ユニット同士を行方向又は列方向に接離可能に設けることで、行方向又は列方向で隣り合う装置ユニットの保持手段同士の間隔を調整することができる。これにより、金型の分割面上で二行多列のマトリックス状に配置された四の倍数の数(例えば、八個、十二個…)の成形品を、保持装置を交換することなく各保持手段で適正に保持することができる。
【0024】
本発明の一態様として、各保持手段は、互いに接離可能に設けられた一対の挟持爪を備え、各保持手段の一対の挟持爪は、先端が他の行及び他の列に属する保持手段側に向くように配置されるとともに、対向する相手方の挟持爪と対向する面とは反対側の面が先端に向かうにつれて相手方の挟持爪側に近づくように形成されていることが好ましい。このようにすれば、各行の保持手段を列方向で相対的に接近させるとともに、各列の保持手段を行方向で相対的に接近させたときに、隣り合う保持手段の挟持爪同士が干渉するのを抑制することができる。従って、隣り合う保持手段を最大限接近させることができ、金型の分割面上でマトリックス状に配置された型の間隔が狭くても、その型で成形された成形品を各保持手段で保持することができる。
【0025】
本発明の他態様として、前記第一作動手段は、各行に沿って配置された一対の第一案内体と、該一対の第一案内体に跨るように配置された第一案内ネジとで構成され、各第一案内体は、少なくとも一端側及び他端側に行に沿って延び且つ一方の面側から反対の他方の面側に貫通した第一スリットが形成され、第一案内ネジは、軸線方向の中央側から一端に向けて一方の第一案内体に螺合する第一正ネジが形成される一方、前記中央側から他端に向けて他方の第一案内体に螺合する第一逆ネジが形成され、前記第二作動手段は、前記一対の第一案内体に跨るように各列に沿って配置された一対の第二案内体と、該一対の第二案内体に跨るように配置された第二案内ネジとで構成され、各第二案内体は、少なくとも一端側及び他端側に列に沿って延び且つ一方の面側から反対の他方の面側に貫通した第二スリットが形成され、第二案内ネジは、軸線方向の中央側から一端に向けて一方の第二案内体に螺合する第二正ネジが形成される一方、前記中央側から他端に向けて他方の第二案内体に螺合する第二逆ネジが形成され、各保持手段は、第一スリットと第二スリットとの重複領域に挿入される案内軸が直接的又は間接的に連設されていることが好ましい。このようにすれば、各保持手段を行方向及び列方向に精度よく移動させることができる。
【0026】
具体的に説明すると、一方の第一案内体に第一案内ネジの第一正ネジが螺合されるとともに他方の第一案内体に第一案内ネジの第一逆ネジが螺合されているため、第一案内ネジを回転させると、一対の第一案内体はそれぞれ第一案内ネジに沿って逆方向に移動して接離することになる。
【0027】
そうすると、各保持手段に連設された案内軸は、第一案内体(第一スリットの両側にある実体のある部分の何れか一方)に押されて該第一案内体と同一方向に移動することになるため、該案内軸が連設された保持手段も同様の態様で移動することになる。従って、第一案内ネジの回転操作だけで各行の保持手段を列方向で精度よく接離させることができる。
【0028】
また、一方の第二案内体に第二案内ネジの第二正ネジが螺合されるとともに他方の第二案内体に第二案内ネジの第二逆ネジが螺合されているため、第二案内ネジを回転させると、一対の第二案内体はそれぞれ第二案内ネジに沿って逆方向に移動して接離することになる。
【0029】
そうすると、各保持手段に連設された案内軸は、第二案内体(第二スリットの両側にある実体のある部分の何れか一方)に押されて該第二案内体と同一方向に移動することになるため、該案内軸が連設された保持手段も同様の態様で移動することになる。従って、第二案内ネジの回転操作だけで各列の保持手段を行方向で精度よく接離させることができる。
【0030】
本発明の別の態様として、金型の分割面上で二行二列のマトリックス状に配置された四つの成形品を取り出すことを前提に、前記ユニットベースに基端部が枢結された支持アームをさらに備え、該支持アームは、先端側がロボットアームに連結可能に構成されていることが好ましい。このようにすれば、四つの保持手段の行方向及び列方向の間隔を維持しつつ四つ保持手段を一体的にして回転させることができる。従って、交換後の金型の型の配置が交換前の金型の型の配置に対して傾いた配置になっても、四つの成形品を確実に保持することができる。
【0031】
この場合、前記支持アームは、列及び行が異なる保持手段の成形品の保持中心同士を結ぶ二本の仮想線の交点が回転中心になるように基端部がユニットベースに枢結されていることが好ましい。このようにすれば、ロボットアームのティーチング(動作設定)を行うことなく保持手段の行単位又は列単位での配置の変更、或いは装置ユニットの回転による保持手段全体の配置の変更だけで成形品を各保持手段で保持できる状態にできる。具体的には、何れの金型においてもマトリックス状に配置される四つの型は、スプルゥの開口を中心にして放射状に延びる同一長さのランナーによってスプルゥと連続するように配置されるため、スプルゥの開口と保持装置の前記交点とが一致する状態(前記開口と交点とが同一直線上に位置する状態)が、保持手段で成形品を保持可能な保持装置の配置の基準とされる。従って、支持アームの回転中心を前記交点と一致させ、該交点(回転中心)が金型のスプルゥと一致する位置(交点とスプルゥとが同一直線上に位置する配置)を保持装置の基準位置としてロボットアームをティーチングしておけば、型の配置の異なる金型に変更してもロボットアームのティーチングを行うことなく保持手段の行単位又は列単位での配置の変更、或いは装置ユニットの回転による保持手段全体の配置の変更だけで成形品を各保持手段で保持できる状態にできる。
【発明の効果】
【0032】
以上のように、本発明の射出成形品自動取出ロボット用の成形品保持装置によれば、出成形品を成形する四つ又は四の倍数の数の型が二行多列でマトリックス状に配置された金型を用いて射出成形品を成形することを前提に、型同士の間隔を異にする金型に交換した際、煩雑な作業を行うことなく交換後の金型で成形された成形品を保持できる状態にすることができるという優れた効果を奏し得る。
【図面の簡単な説明】
【0033】
【図1】本発明の一実施形態に係る射出成形品自動取出ロボット用の成形品保持装置の説明図であって、(a)は、正面図を示し、(b)は底面図を示す。
【図2】同実施形態に係る射出成形品自動取出ロボット用の成形品保持装置の断面図であって、(a)は、図1のI−I断面を示し、(b)は、図1のII−II断面を示す。
【図3】同実施形態に係る射出成形品自動取出ロボット用の成形品保持装置の断面図であって、(a)は、図2のIII−III断面図を示し、(b)は、図1のIV−IV断面図を示す。
【図4】同実施形態に係る射出成形品自動取出ロボット用の成形品保持装置の保持手段及び支持体の説明図であって、(a)は正面図を示し、(b)は、側面図を示す。
【図5】同実施形態に係る射出成形品自動取出ロボット用の成形品保持装置で成形品を取り出すときの工程図であって、(a)は、製品の成形時に保持装置を待機させている状態を示し、(b)は、二つの金型が型開きされた状態を示し、(c)は、金型間に保持装置を配置した状態を示し、(d)は、保持装置の保持手段で成形品を保持する状態を示し、(e)は、金型から成形品を取り外した状態を示し、(f)は、成形品を集積位置にまで移送する状態を示す。
【図6】同実施形態に係る射出成形品自動取出ロボット用の成形品保持装置の作動説明図であって、(a)は、各行の保持手段を列方向に接離させる状態を示し、(b)は、各列の保持手段を行方向に接離させる状態を示し、(c)は、各保持手段を行方向及び列方向に接離させる状態を示し、(d)は、装置ユニットを回転させる状態を示す。
【図7】本発明の他実施形態に係る射出成形品自動取出ロボット用の成形品保持装置の正面図を示す。
【図8】従来の射出成形品自動取出ロボット用の成形品保持装置の説明図であって、(a)は、正面図を示し、(b)は、側面図を示す。
【発明を実施するための形態】
【0034】
以下、本発明の一実施形態に係る射出成形品自動取出ロボット用の成形品保持装置(以下、単に保持装置という)について添付図面を参照しつつ説明する。
【0035】
本実施形態に係る保持装置は、射出成形機に装備された二つの金型を離間させた状態(いわゆる、型開きした状態)で、金型間にある四つの成形品を取り出すことを対象としている。すなわち、本実施形態の保持装置が装備される射出成形品自動取出ロボットは、少なくとも二つの金型が互いに対峙するように装備される射出成形機に付設されるものであり、二つの金型を型開きした状態で、スプルゥやランナー内で硬化した樹脂が分離されて一方の金型の分割面上に二行二列のマトリックス状の配置で残る四つの成形品を取り出すことを対象としている。
【0036】
これに伴い、本実施形態に係る保持装置は、図1(a)、図1(b)、図2(a)、及び図2(b)に示す如く、射出成形品自動取出ロボットRのロボットアームRA(図6参照)に対して直接的又は間接的に連結されるユニットベース20と、該ユニットベース20上に平面的に二行二列で配置された四つの保持手段21…とを有する装置ユニット2を一つ備えている。また、本実施形態に係る保持装置1は、図1(a)及び図2(a)に示す如く、装置ユニット2のユニットベース20に基端部が枢結された支持アーム3をさらに備えている。
【0037】
前記装置ユニット2は、前記ユニットベース20及び四つの保持手段21…を備える他、各行R1,R2の保持手段21…を列F1,F2方向に相対的に接離させる第一作動手段22と、各列F1,F2の保持手段21…を行R1,R2方向に相対的に接離させる第二作動手段23とをさらに備えている。なお、ここで「行R1,R2」及び「列F1,F2」とは、マトリックスを構成する並びを意味するものであり、「行R1,R2」が横方向又は縦方向の何れか一方の並びであるときに、「列F1,F2」が「行R1,R2」と直交する方向の並びであることを意味する。すなわち、「行R1,R2」というときには、横方向又は縦方向の何れか一方の並び方向を意味し、「列F1,F2」というときには、横方向又は縦方向の何れか他方の並び方向を意味するものである。
【0038】
前記ユニットベース20は、枠体200と、該枠体200を両側から挟むように配置された一対の補強部材201,202とを備えている。本実施形態に係る枠体200は、金属材料を削り出して形成されたもので、図1(a)に示す如く、正面視矩形状(正方形状)に形成されている。すなわち、枠体200は、互いに間隔をあけて対向する一対の第一枠部200a,200aと、一対の第一枠部200a,200aの両端同士を連結した一対の第二枠部200b,200bとで構成されており、第一枠部200a,200a及び第二枠部200b,200bが矩形状(本実施形態においては正方形状)の領域を画定している。
【0039】
一対の補強部材201,202は、図1(a)及び図3(a)に示す如く、一方向に延びる第一帯状部201a,202aと、該第一帯状部201a,202aと交差するように延びる第二帯状部201b,202bとで構成され、正面視十字形状に形成されている。そして、各補強部材201,202は、第一帯状部201a,202aと第二帯状部201b,202bとの交点が枠体200の画定した矩形の領域の中央と一致又は略一致するように配置され、第一帯状部201a,202aの両端部が一対の第一枠部200a,200aに固定されるとともに第二帯状部201b,202bの両端部が一対の第二枠部200b,200bに固定されている。そして、図1(a)に示す如く、一方の補強部材201は、第一帯状部201a,202aと第二帯状部201b,202bとの交点上に前記支持アーム3の基端部が枢結されている。
【0040】
前記四つの保持手段21…は、それぞれ同一構成になっており、本実施形態においては、図4(a)及び図4(b)に示す如く、互いに対峙するように配置される一対の挟持爪210,210と、該一対の挟持爪210,210を接離させるアクチュエータ211とを備えている。すなわち、本実施形態に係る保持手段21…は、成形品を把持するグリップ手段で構成されている。
【0041】
一対の挟持爪210,210は、互いに接近することで成形品を挟み込んで保持できるように形成されている。具体的には、各挟持爪210,210は、成形品を挟み込む挟持部210aと、該挟持部210aの基端側に連設され、アクチュエータ211の後述する出力部211a,211aに連結されるアクチュエータ連結部210bとを備えている。
【0042】
本実施形態において、一対の挟持爪210,210は、外観円柱状の成形品を保持することを対象に形成されている。これに伴い、図4(a)に示す如く、挟持部210aの相手方の挟持爪210,210と対向する面(以下、保持面CSという)は、挟持部210aの延びる方向における中央部を境にした先端側の領域が先端に向かうにつれて相手方の挟持爪210,210に近づくように傾斜した傾斜面CS1で構成され、中央部を境にした基端側の領域が基端に向かうにつれて相手方の挟持爪210,210に近づくように傾斜した傾斜面CS2で構成されている。
【0043】
これにより、各挟持爪210,210の挟持部210a(保持面CS)で外観円柱状の成形品の外周を取り囲むように保持したときに、その成形品の外周が保持面CSを構成する二つの傾斜面CS1,CS2と線接触するようになっている。そして、各挟持爪210,210(挟持部210a)は、相手方の挟持爪210,210と対向する保持面CSとは反対側の面(外面)が先端に向かうにつれて相手方の挟持爪210,210側に近づくように傾斜して形成されている。これにより、一対の挟持爪210,210は、互いに対峙した状態で各挟持部210aの外面が先端に向かうにつれて相手方の挟持爪210,210に接近して先細りした態様になるように構成されている。
【0044】
前記アクチュエータ連結部210bは、挟持部210aの基端部に連設されており、アクチュエータ211(エアシリンダ211)の出力部211a,211aに重ね合わせた状態で連結される。本実施形態に係る挟持爪210,210は、保持する対象(成形品)に応じて取り替え可能になっている。すなわち、上述の如く、成形品が外観円柱状のものである場合には、上述の挟持爪210,210を採用するが、成形品が外観円柱状以外の形状のものやサイズの異なるものである場合には、挟持部210a(保持面CS)の形状やサイズが成形品の外形やサイズに対応した挟持爪210,210に交換される。
【0045】
そのため、本実施形態に係る挟持爪210,210は、アクチュエータ211の出力部211a,211aに対してアクチュエータ連結部210bがネジ部材212で螺着されるようになっている。そして、単一のネジ部材212で螺着すると挟持爪210,210がネジ部材212を中心にして回転する虞があるため、本実施形態に係る挟持爪210,210は、アクチュエータ連結部210bの出力部211a,211aとの重ね合わせ面に対し、出力部211a,211aに形成された凹部211bに嵌合可能な凸部210cが設けられている。なお、上述の如く交換される他の挟持爪210,210のアクチュエータ連結部210bは、何れも上記構成の挟持爪210,210のアクチュエータ連結部210bの態様と共通して形成される。
【0046】
本実施形態において、前記アクチュエータ211には、シリンダ内にピストンロッドが内装されたエアシリンダが採用されている。該エアシリンダ211は、シリンダが外観直方体状に形成されており、シリンダ内のピストンロッドに連結された一対の出力部211a,211aが該シリンダの側面から外方に延出している。そして、該エアシリンダ211は、シリンダに連設された接続ポートにエアホースが接続され、該エアホースからの圧縮空気の供給とその停止とを切り替えることで一対の出力部211a,211aが互いに接離するようになっている。
【0047】
そして、本実施形態に係る保持手段21…は、一対の挟持爪210,210の位置を検出するセンサS,Sが設けられており、挟持爪210,210の位置を検出することで成形品の保持状態が適正であるかどうかを判断できるようになっている。
【0048】
本実施形態に係る保持装置1は、保持手段21…が上述の如く構成されることを前提に、図4(b)に示す如く、各保持手段21…を支持する支持体213を備えている。かかる支持体213は、アクチュエータ211(シリンダ)を一方の面側で支持する支持プレート214と、該支持プレート214の他方の面に連結される案内軸215とを備えている。
【0049】
前記支持プレート214は、図4(a)、及び図4(b)に示す如く、平面視矩形状をなす取付ベース部214aと、該取付ベース部214aの一端に連設されて先細りしたベース支持部214bとで構成されており、一対の挟持爪210,210が取付ベース部214a側からベース支持部214b側に延びた配置になるように取付ベース部214aの一方の面にアクチュエータ211(エアシリンダ211)がネジ止めされている。
【0050】
前記案内軸215は、図2(a)、図2(b)、及び図3(b)に示す如く、ユニットベース20に内装された第一作動手段22及び第二作動手段23に支持されるもので、この第一作動手段22及び第二作動手段23による支持で保持手段21…及び支持プレート214を支持するようになっている。
【0051】
具体的には、案内軸215は、図4(b)に示す如く、角柱状の軸本体215aと、該軸本体215aの一端部に設けられた鍔部215bと、軸本体215aの他端部に連設された雄ネジ部215cとで構成されている。そして、該案内軸215は、図3(b)に示す如く、鍔部215bが他方の補強部材202側に位置するようにユニットベース20内の第一作動手段22及び第二作動手段23に軸本体215aが挿通された状態で雄ネジ部215c及び軸本体215aの一部がユニットベース20(枠体200)から外方に延出し、支持プレート214のベース支持部214bに螺合できるように形成されている。
【0052】
このように、支持プレート214のベース支持部214bに案内軸215の雄ネジ部215cが螺合されることにより、保持手段21…は、支持プレート214とともに案内軸215を介してユニットベース20に支持された状態になっている。なお、案内軸215は、第一作動手段22及び第二作動手段23に挿通される軸本体215aが角柱状に形成され、第一作動手段22及び第二作動手段23(後述する軸挿通領域SA:図3(a)参照)に対する挿通で自身の軸線周りでの回転が規制されるため、雄ネジ部215cに対して支持プレート214を螺合させるときに支持プレート214を雄ネジ部215cの軸線周りで回転させることは言うまでもない。
【0053】
そして、各保持手段21…は、図1(a)に示す如く、一対の挟持爪210,210の先端が他の行R1,R2及び他の列F1,F2に属する保持手段21側に向くように配置されて固定されている。すなわち、案内軸215の雄ネジ部215cに螺合させた支持プレート214は、該雄ネジ部215c周りで回転する虞があるため、図3(b)に示す如く、一対の挟持爪210,210の先端が枠体200(第一枠部200a,200a及び第二枠部200b,200b)の画定する矩形(正方形)の中央に向いた状態で、案内軸215又は案内軸215に回り止め状態で外嵌されたスペーサ(本実施形態においてはスペーサ)216と支持プレート214とに跨るように、ノックピンNが打ち込まれている。
【0054】
前記第一作動手段22及び第二作動手段23は、図1(a)、図1(b)、図2(a)、及び図2(b)に示す如く、ユニットベース20に内装されている。すなわち、第一作動手段22及び第二作動手段23は、第一枠部200a,200a及び第二枠部200b,200bが画定する矩形状の領域内に配置されている。
【0055】
前記第一作動手段22は、図3(a)に示す如く、保持手段21…の各行R1,R2(図1(a)参照)に沿って配置された一対の第一案内体220,220と、該一対の第一案内体220,220に跨るように配置された第一案内ネジ221とで構成されている。
【0056】
各第一案内体220,220は、一方向に長手をなすように形成されており、両端が保持手段21…を列F1,F2単位で行R1,R2(図1(a)参照)方向に移動(接離)させる移動範囲を超えるように長手方向の長さに設定されている。すなわち、各第一案内体220,220は、二列F1,F2の保持手段21…が最大に離間したときの最大間隔以上の長さに設定されている。
【0057】
そして、本実施形態に係る保持装置1は、枠体200が矩形状に形成されているため、一対の第一案内体220,220は、第一枠部200a,200aと平行又は略平行になるように互いに間隔をあけて枠体200内に配置されている。また、本実施形態において、一対の第一案内体220,220は、枠体200が画定する矩形状の領域の中央を基準にして対称になるように配置されている。
【0058】
そして、各第一案内体220,220は、少なくとも一端側及び他端側に各行R1,R2に沿って延び且つ一方の面側から反対にある他方の面側に貫通した第一スリット222,222が形成される。本実施形態において、各第一案内体220,220は、長手方向の中央部を除き、該中央部の両側に長手方向に延びる一対の第一スリット222,222が形成されている。かかる第一スリット222,222は、長穴状に形成してもよいが、本実施形態においては、第一案内体220,220の両端で開放するように形成されている。これにより、各第一案内体220,220は、一端側及び他端側のそれぞれに第一スリット222,222を挟んで一対の第一案内部223,223が形成されている。すなわち、各第一案内体220,220は、一端側及び他端側に長手方向と直交する方向に間隔をあけて、該長手方向に延びる一対の第一案内部223,223が形成されている。
【0059】
そして、各第一案内体220,220の中央部には、第一案内ネジ221を螺合させる第一ネジ穴224が前記第一スリット222,222の貫通方向と直交する方向に延びるように貫通して設けられている(図2(a)参照)。本実施形態において、後述する通り、第一案内ネジ221の一端側に正ネジ(第一正ネジ221a)が形成されるとともに他端側に逆ネジ(第一逆ネジ221b)が形成されるため、一方の第一案内体220の第一ネジ穴224(雌ネジ)は正ネジに形成され、他方の第一案内体220の第一ネジ穴224(雌ネジ)は逆ネジに形成されている。
【0060】
前記第一案内ネジ221は、軸線方向の中央側から一端側に向けて一方の第一案内体220に螺合する第一正ネジ221aが形成される一方、前記中央側から他端側に向けて他方の第一案内体220に螺合する第一逆ネジ221bが形成されている。また、本実施形態に係る第一案内ネジ221は、一端面上に六角穴(採番しない)が穿設されている(図1(b)参照)。
【0061】
そして、第一案内ネジ221は、第一正ネジ221aが一方の第一案内体220の第一ネジ穴224に螺合されるとともに第一逆ネジ221bが他方の第一案内体220の第一ネジ穴224に螺合された上で、第一案内体220,220と直交するように配置され、枠体200の第二枠部200b,200bに穿設された貫通穴(採番しない)が挿通されている。これにより、第一案内ネジ221は、枠体200(ユニットベース20)に両端が支持され、第二枠部200bの貫通穴から一端面上の六角穴に六角レンチを嵌合できる状態になっている。なお、一対の第一案内体220,220は、上述の如く、第一案内ネジ221(第一正ネジ221a及び第一逆ネジ221b)が螺合される際、第一案内ネジ221の両端を枠体200に支持させた状態で枠体200が画定した矩形状の領域の中央を基準に対称となる位置にまで移動されることは言うまでもない。
【0062】
前記第二作動手段23は、一対の第一案内体220,220に跨るように保持手段21…の各列F1,F2に沿って配置された一対の第二案内体230,230と、該一対の第二案内体230,230に跨るように配置された第二案内ネジ231とで構成されている。
【0063】
各第二案内体230,230は、一方向に長手をなすように形成されており、両端が保持手段21…を行R1,R2単位で列F1,F2方向に移動(接離)させる移動範囲を超えるように長手方向の長さに設定されている。すなわち、各第二案内体230,230は、二行R1,R2の保持手段21…が最大に離間したときの最大間隔以上の長さに設定されている。
【0064】
本実施形態に係る保持装置1は、枠体200が矩形状に形成されているため、一対の案内体は、第二枠部200b,200bと平行又は略平行になるように互いに間隔をあけて枠体200内に配置されている。また、本実施形態において、一対の第二案内体230,230は、枠体200が画定する矩形状の領域の中央を基準にして対称になるように配置されている。
【0065】
各第二案内体230,230は、少なくとも一端側及び他端側に各列F1,F2に沿って延び且つ一方の面側から反対にある他方の面側に貫通した第二スリット232,232が形成される。本実施形態において、各第二案内体230,230は、長手方向の中央部を除き、該中央部の両側に長手方向に延びる一対の第二スリット232,232が形成されている。かかる第二スリット232,232は、長穴状に形成してもよいが、本実施形態においては、第二案内体230,230の両端で開放するように形成されている。これにより、各第二案内体230,230は、一端側及び他端側のそれぞれに第二スリット232,232を挟んで一対の第二案内部233,233が形成されている。すなわち、各第二案内体230,230は、一端側及び他端側に長手方向と直交する方向に間隔をあけて、該長手方向に延びる一対の第二案内部233,233が形成されている。
【0066】
そして、各第二案内体230,230の中央部には、第二案内ネジ231を螺合させる第二ネジ穴234が前記第二スリット232,232の貫通方向と直交する方向に延びるように貫通して設けられている(図2(a)参照)。本実施形態において、後述する通り、第二案内ネジ231の一端側に正ネジ(第二正ネジ231a)が形成されるとともに他端側に逆ネジ(第二逆ネジ231b)が形成されるため、一方の第二案内体230の第二ネジ穴234(雌ネジ)は正ネジに形成され、他方の第二案内体230の第二ネジ穴234(雌ネジ)は逆ネジに形成されている。
【0067】
前記第二案内ネジ231は、軸線方向の中央側から一端側に向けて一方の第二案内体230,230に螺合する第二正ネジ231aが形成される一方、前記中央側から他端側に向けて他方の第二案内体230,230に螺合する第二逆ネジ231bが形成されている。また、本実施形態に係る第二案内ネジ231は、第一案内ネジ221と同様に、一端面上に六角穴(図示しない)が穿設されている。
【0068】
そして、第二案内ネジ231は、第二正ネジ231aが一方の第二案内体230の第二ネジ穴234に螺合されるとともに第二逆ネジ231bが他方の第二案内体230の第二ネジ穴234に螺合された上で、第二案内体230,230と直交するように配置され、枠体200の第一枠部200a,200aに穿設された貫通穴(採番しない)が挿通されている。これにより、第二案内ネジ231は、枠体200(ユニットベース20)に両端が支持され、一方の第一枠部200aの貫通穴から一端面上の六角穴に六角レンチを嵌合できる状態になっている。なお、一対の第二案内体230,230は、上述の如く、第二案内ネジ231(第二正ネジ231a及び第二逆ネジ231b)が螺合される際、第二案内ネジ231の両端を枠体200に支持させた状態で枠体200が画定した矩形状の領域の中央を基準に対称となる位置にまで移動されることは言うまでもない。
【0069】
そして、上記構成の第一作動手段22及び第二作動手段23は、第一案内ネジ221及び第二案内ネジ231の軸線方向の中央同士が重なるように枠体200内で重ね合わされた状態で配置されている。これにより、一対の第一案内体220,220及び一対の第二案内体230,230は、正面方向(枠体200が画定する領域が矩形状に見える方向)から見て井桁の如く態様をなしている。
【0070】
すなわち、一対の第一案内体220,220の一端側の一部が一方の第二案内体230,230の両端側の一部と重なり合うとともに、一対の第一案内体220,220の他端側の一部が他方の第二案内体230,230の両端側の一部と重なり合うことで、第一案内体220,220と第二案内体230,230との交点が四カ所に形成されている。そして、各交点において、正面方向から見て第一スリット222,222の一部と第二スリット232,232の一部とが重なりあった状態になっている。すなわち、各交点において一対の第一案内部223,223が一対の第二案内部233,233に跨るように配置された状態になり、正面方向から見て第一案内部223,223及び第二案内部233,233が矩形状(本実施形態においては略正方形状)の領域(以下、軸挿通領域という)SAを画定した状態になっている。
【0071】
そして、本実施形態に係る保持装置1は、四カ所に形成された軸挿通領域SA(四つの交点)のそれぞれに対し、保持手段21…を支持した案内軸215の軸本体215aが挿通されている。案内軸215は、上述の如く、軸本体215aが角柱状に形成されているため、軸挿通領域SAに挿通された状態で、軸本体215aの外面を構成する一対の平面と一対の第一案内部223,223とが対向し、軸本体215aの外面を構成する別の一対の平面と一対の第二案内部233,233とが対向した状態になっている。これにより、各案内軸215は、自己の軸線周りでの回転が規制されており、該案内軸215の連設された支持プレート214で支持した保持手段21…の姿勢を一定に保てるようになっている。
【0072】
図1に戻り、前記支持アーム3は、列F1,F2及び行R1,R2が異なる保持手段21…の成形品の保持中心同士を結ぶ二本の仮想線VL,VLの交点で回転中心になるように装置ユニット2のユニットベース20に対して基端部が枢結され、先端側がユニットベース20(枠体200)よりも外方に延出している。具体的に説明すると、支持アーム3は、一方向に長手をなして形成されたアーム本体30と、該アーム本体30の一端に連設されたロボットアーム連結部31とで構成されている。
【0073】
前記アーム本体30は、他端部(基端部)が一方の補強部材201(第一帯状部201a,202aと第二帯状部201b,202bとの交差点)にネジ部材Bで締結されており、そのネジ部材Bを緩めることで該ネジ部材Bを回転中心にしてユニットベース20に対して回転できるようになっている。
【0074】
これにより、本実施形態に係る装置ユニット2(ユニットベース20)は、ロボットアームRAに連結されたアーム本体30(支持アーム3)に対し、列F1,F2及び行R1,R2が異なる保持手段21…の成形品の保持中心同士を結ぶ二本の仮想線VL,VLの交点を回転中心にして回転(傾動)可能になっている。
【0075】
前記ロボットアーム連結部31は、取り付けの対象となるロボットアームRAの先端に設けられる接続構造に応じて設定されるもので、ロボットアームRAに対してネジ止めで連結されるものやワンタッチで連結できるクイック連結機構で連結されるもの等が採用される。
【0076】
本実施形態の保持装置1は、支持アーム3(ユニットベース20)の回転範囲が制限されている。すなわち、保持装置1は、支持アーム3がユニットベース20の第一枠部200a内にある範囲でユニットベース20が回転できるようになっている。
【0077】
そして、本実施形態に係る保持装置1は、ユニットベース20の姿勢を適正な状態で維持させるための位置決手段4を備えている。かかる位置決手段4は、他方の第一枠部200aの外面に連設された円弧板からなるガイド体40と、支持アーム3に取り付けられた押しネジ41とで構成されており、ガイド体40の円弧面上を押しネジ41で押圧することで支持アーム3とユニットベース20との相対位置を適正な状態で維持できるようになっている。なお、ガイド体40の円弧面は、支持アーム3(ユニットベース20)の回転中心を曲率中心にして形成されている。
【0078】
そして、本実施形態に係る保持装置1は、二行二列で平面的に配置された四つの保持手段21…が射出成形機に装備された金型の分割面(型開きした状態で成形品が残る分割面)側に向くように、支持アーム3のロボットアーム連結部31がロボットアームRAの先端部(接続構造)に対して連結される。
【0079】
次に、上記構成の保持装置1の作動について、該保持装置1を装備した射出成形品自動取出ロボットRの動作(射出成形機からの成形品の取り出し動作)と併せて説明する。なお、保持装置1の保持手段21…の配置の変更については、金型が交換されたときに行う作業であるため、後述することとし、ここでは便宜上、射出成形品自動取出ロボットRに装備された保持装置1(ロボットアームRAに連結済みの保持装置1)は、各保持手段21…の配置が射出成形機の型の配置に対応した状態になっていることとする。
【0080】
まず、成形品M…を成形するに当り、射出成形機は、図5(a)に示す如く、装備された二つの金型M1,M2を接近させて互いの分割面を当接させた後(型締めした後)、射出ユニットのノズルを金型M1,M2のスプルゥに接続し、金型M1,M2間に形成された成形空間内に樹脂を射出する。このとき、射出成形品自動取出ロボットRは、二つの金型M1,M2が離間したとき(型開きしたとき)に、保持装置1を金型M1,M2間に挿入できる位置(待機位置WP)で待機させている。
【0081】
そして、図5(b)に示す如く、射出成形機が二つの金型M1,M2を離間させる(型開きする)と、金型M2のスプルゥやランナー内で硬化した樹脂が成形品M…から分離され、他方の金型M2の分割面上にあるスプルゥ(開口)から等距離になるように、四つの成形品M…が一方の金型M1の分割面上でマトリックス状に配置された状態に残る。
【0082】
そうすると、射出成形品自動取出ロボットRは、ロボットアームRAを動作させ、図5(c)に示す如く、保持装置1を離間した金型M1,M2間の成形品取出可能位置FAに配置する。すなわち、射出成形品自動取出ロボットRは、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点(図1(a)参照)が他方の金型M2の分割面上にあるスプルゥ(開口)と一致する位置(成形品取出可能位置FA)に保持装置1を配置する。また、射出成形品自動取出ロボットRは、各保持手段21…の一対の挟持爪210,210を離間させ、一対の挟持爪210,210間に成形品M…を配置できる状態にする。
【0083】
しかる後、射出成形品自動取出ロボットRは、図5(d)に示す如く、ロボットアームRAを動作させて保持装置1を成形品M…の残る金型M1に向けて前進させ、分割面上に残る各成形品M…が各保持手段21…の挟持爪210,210間に位置する成形品取出位置FBに配置する。
【0084】
そして、射出成形品自動取出ロボットRは、保持装置1が成形品取出位置FBにある状態で、各保持手段21…の一対の挟持爪210,210を閉じて(接近させて)該挟持爪210,210で成形品M…を把持した後、図5(e)に示す如く、ロボットアームRAを動作させて保持装置1を一方の金型M1から遠ざかるように後進させる。なお、射出成形品自動取出ロボットRは、上述の如く、金型M1,M2間(成形品取出可能位置FAと成形品取出位置FBとの間)で保持装置1を前進及び後進させるとき、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点が他方の金型M2の分割面上にあるスプルゥ(開口)と一致又は略一致するように保持装置1を移動させるようになっている。
【0085】
このように、保持手段21…(一対の挟持爪210,210)が成形品M…を把持した状態で保持装置1を金型M1,M2間で後進させることで、成形品M…が金型M1から分離することになるため、射出成形品自動取出ロボットRは、引き続きロボットハンドを動作させ、図5(f)に示す如く、保持装置1を金型M1,M2間から外側に移動させる。このように保持装置1が金型M1,M2間から外側に出ると、射出成形装置は型締めして次の成形工程に入ることになる。
【0086】
そして、射出成形品自動取出ロボットRは、金型M1,M2間から外側に出た保持装置1を所定の集積位置にまで移動させた後、各保持手段21…の一対の挟持爪210,210を離間させて成形品M…の保持を解除し、成形品M…を集積位置に落下させる。その後、射出成形品自動取出ロボットRは、保持装置1を再び待機位置WPに戻し、図5(a)に示す如く、次の成形工程における型開きが行われるまで保持装置1を待機位置WPで待機させ、上述の如く、射出成形機の型開き及び型締めの状況に応じてロボットアームRA及び保持装置1を動作させる。このように、射出成形品自動取出ロボットRを射出成形機に付設することで、射出成形機による成形品M…の成形と、成形された成形品M…の取り出しと連動させて繰り返し連続的に行うことができる。
【0087】
そして、異なる成形品M…を成形する場合、その成形品M…に対応した型が形成された金型M1,M2に交換される。そして、交換される金型M1,M2の型の形態(成形される成形品M…の形態)が変更前の金型M1,M2の型の形態(成形される成形品M…の形態)と異なり、先の成形品M…の取り出しに用いられていた保持手段21…の挟持爪210,210で変更後の成形品M…を挟持できない場合には、その成形品M…の形態に応じた挟持爪210,210に交換する。
【0088】
また、交換される金型M1,M2の型の配置が変更前の金型M1,M2の型の配置と異なる場合には、図6(a)〜図6(c)に示す如く、第一作動手段22で同じ行にある二つの保持手段21…と別の行にある二つの保持手段21…とを接離させ、また、第二作動手段23で同じ列にある二つの保持手段21…と別の列にある二つの保持手段21…とを接離させることで、四つの保持手段21…の配置を金型M1,M2の型の配置に対応するように調整する。
【0089】
より具体的には、六角レンチを用いて第一案内ネジ221及び第二案内ネジ231の少なくとも何れか一方を回転させる。第一案内ネジ221に対して操作を行った場合、図6(a)に示す如く、一対の第一案内体220,220の両方が第一案内ネジ221に沿って移動し、互いに接離することになる。すなわち、一方の第一案内体220,220に第一案内ネジ221の第一正ネジ221aが螺合されるとともに他方の第一案内体220,220に第一案内ネジ221の第一逆ネジ221bが螺合されているため、第一案内ネジ221を回転させると、一対の第一案内体220,220が第一案内ネジ221に沿って逆方向に移動し、互いに接離することになる。そうすると、軸挿通領域SAに挿通された案内軸215は、第一案内体220,220(第一スリット222,222の両側にある実体のある部分(第一案内部223,223)の何れか一方)に押されて該第一案内体220,220と同一方向に移動することになり、案内軸215が連設された支持プレート214に支持された保持手段21…も同様の態様で移動し、異なる行R1,R2の保持手段21…同士が列F1,F2方向で接離することになる。
【0090】
これに対し、第二案内ネジ231に対して操作を行った場合、図6(b)に示す如く、一対の第二案内体230,230の両方が第二案内ネジ231に沿って移動し、互いに接離することになる。すなわち、一方の第二案内体230,230に第二案内ネジ231の第二正ネジ231aが螺合されるとともに他方の第二案内体230,230に第二案内ネジ231の第二逆ネジ231bが螺合されているため、第二案内ネジ231を回転させると、一対の第二案内体230,230が第二案内ネジ231に沿って逆方向に移動し、互いに接離することになる。そうすると、軸挿通領域SAに挿通された案内軸215は、第二案内体230,230(第二スリット232,232の両側にある実体のある部分(第二案内部233,233)の何れか一方)に押されて該第二案内体230,230と同一方向に移動することになり、案内軸215が連設された支持プレート214に支持された保持手段21…も同様の態様で移動し、異なる列F1,F2の保持手段21…同士が行R1,R2方向で接離することになる。
【0091】
そして、図6(c)に示す如く、各行R1,R2の保持手段21…を列F1,F2方向に接離させ、且つ各列F1,F2の保持手段21…を行R1,R2方向に接離させると、四つの保持手段21…は、枠体200が画定する矩形状の領域の中央を中心にして放射状に移動した状態になるが、各保持手段21…の一対の挟持爪210,210は、先端が他の行R1,R1及び他の列F1,F2に属する保持手段21…側に向くように配置されるとともに、対向する相手方の挟持爪210,210と対向する面とは反対側の面が先端に向かうにつれて相手方の挟持爪210,210側に近づくように形成され、また、支持プレート214のベース支持部214bが先細りに形成されているため、隣り合う保持手段21…の挟持爪210,210同士の干渉及び隣り合う保持手段21…を支持する支持プレート214同士の干渉を最大限抑えることができる。従って、隣り合う保持手段21…同士を最大限接近させることができるため、金型M1,M2の分割面上に形成される四つの型の間隔が狭くても各保持手段21…を各型(成形品M…)の配置に対応させることができる。
【0092】
本実施形態において、上述の如く、一対の第一案内体220,220が枠体200の画定する矩形状の領域の中央を基準に対称に配置されるとともに、一対の第二案内体230,230が枠体200の画定する矩形状の領域の中央を基準に対称に配置され、また、第一案内ネジ221の操作で一対の第一案内体220,220のそれぞれが同一の移動量で相対的に移動し、第二案内ネジ231の操作で一対の第二案内体230,230のそれぞれが同一の移動量で相対的に移動するように構成されているため、異なる行R1,R2の保持手段21…同士を接離させても、異なる列F1,F2の保持手段21…同士を接離させても、四つの保持手段21…は二行二列でマトリックス状に配置された状態で維持し、また、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点が一定位置で維持することになる。
【0093】
そして、各保持手段21…を行R1,R2方向及び列F1,F2方向の少なくとも何れか一方に移動させても、金型M1,M2の分割面に形成された四つの型の配置に対して四つの保持手段21…の配置が傾いている(ユニットベース20の回転中心(ネジ部材B)の周方向にずれている)場合、図6(d)に示す如く、ユニットベース20を回転中心周りで回転させ、各保持手段21…を型の配置に合わせた後、位置決手段4でユニットベース20の位置決めを行う。
【0094】
これにより、型開きした金型M1,M2間に保持装置1が位置した状態で各保持手段21…(成形品M…の保持位置)が金型M1,M2の分割面上に形成された四つの型(分割面上に残る四つの成形品M…)の配置に対応した状態にすることができる。
【0095】
そして、本実施形態に係る保持装置1は、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点が一定位置で維持するため、上述の如く、保持手段21…の配置を変更しても、ロボットアームRAの動作に対する設定変更を行う必要はない。
【0096】
すなわち、射出成形機は、樹脂を射出する射出ユニットが二つの金型M1,M2を接離させる方向と一致する方向にのみ移動可能に設けられ、射出ユニットを金型M1,M2側に移動させることで射出ユニットのノズルが金型M2の接続口に対して一定位置で接続されるように構成され、また、射出成形機に装備される金型M1,M2は、分割面上に形成される四つの型がスプルゥの開口を起点にして等距離の位置に形成されるため、保持装置1の成形品取出可能位置FA及び成形品取出位置FBを、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点と金型M2の分割面上に形成されるスプルゥの開口とが一致する位置に設定しておけば、各保持手段21…の配置を変更してもロボットアームRAの動作を金型M1,M2の変更前と同じ動作にしても各保持手段21…を成形品M…の配置に対応させた状態にすることができ、成形品M…の取り出しが可能になる。
【0097】
以上のように、本実施形態に係る保持装置1によれば、射出成形品自動取出ロボットRのロボットアームRAに対して直接的又は間接的に連結されるユニットベース20と、該ユニットベース20上に平面的に二行二列で配置された四つの保持手段21…とを有する装置ユニット2を一つ備え、該装置ユニット2は、異なる行R1,R2の保持手段21…を列F1,F2方向で相対的に接離させる第一作動手段22と、異なる列F1,F2の保持手段21…を行R1,R2方向で相対的に接離させる第二作動手段23とを備えているため、二列の間隔(各列F1,F2にある保持手段21…同士の間隔)及び二行の間隔(各行R1,R2にある保持手段21…同士の間隔)を独立して変更することができる。
【0098】
従って、本実施形態に係る保持装置1は、成形品M…を成形する四つの型が二行二列でマトリックス状に配置された金型M1,M2を用いて射出成形品M…を成形するに当り、型同士の間隔を異にする金型M1,M2に交換されても、該金型M1,M2で成形された成形品M…のそれぞれを確実に保持することができるという優れた効果を奏し得る。
【0099】
また、各保持手段21…は、互いに接離可能に設けられた一対の挟持爪210,210を備え、各保持手段21…の一対の挟持爪210,210は、先端が他の行及び他の列に属する保持手段21…側に向くように配置されるとともに、対向する相手方の挟持爪210,210と対向する面とは反対側の面が先端に向かうにつれて相手方の挟持爪210,210側に近づくように傾斜して形成されているため、隣り合う保持手段21…同士の干渉を抑えることができる。これにより、金型M1,M2の分割面上に形成される四つの型の間隔が狭くても各保持手段21…を各型(成形品M…)の配置に対応させることができ、その型で成形された成形品M…を各保持手段21…で保持させることができる。
【0100】
さらに、前記第一作動手段22は、各行R1,R2に沿って配置された一対の第一案内体220,220と、該一対の第一案内体220,220に跨るように配置された第一案内ネジ221とで構成され、各第一案内体220,220は、少なくとも一端側及び他端側に各行R1,R2に沿って延び且つ一方の面側から反対にある他方の面側に貫通した第一スリット222,222が形成され、第一案内ネジ221は、軸線方向の中央側から一端側に向けて一方の第一案内体220に螺合する第一正ネジ221aが形成される一方、前記中央側から他端側に向けて他方の第一案内体220に螺合する第一逆ネジ221bが形成され、前記第二作動手段23は、一対の第一案内体220,220に跨るように各列F1,F2に沿って配置された一対の第二案内体230,230と、該一対の第二案内体230,230に跨るように配置される第二案内ネジ231とで構成され、各第二案内体230,230は、少なくとも一端側及び他端側に各列F1,F2に沿って延び且つ一方の面側から反対にある他方の面側に貫通した第二スリット232,232が形成され、第二案内ネジ231は、軸線方向の中央側から一端側に向けて一方の第二案内体230に螺合する第二正ネジ231aが形成される一方、前記中央側から他端側に向けて他方の第二案内体230に螺合する第二逆ネジ231bが形成され、各保持手段21…は、第一スリット222,222と第二スリット232,232との重複領域に挿入される案内軸215が間接的に連設されているため、各保持手段21…を行R1,R2方向及び列F1,F2方向に精度よく移動させることができる。
【0101】
また、本実施形態に係る保持装置1は、金型M1の分割面上で二行二列のマトリックス状に配置された四つの成形品M…を取り出すことを前提に、前記ユニットベース20に基端部が枢結された支持アーム3をさらに備え、該支持アーム3は、先端側がロボットアームRAに連結可能に構成されているため、四つの保持手段21…の行R1,R2方向及び列F1,F2方向の間隔を維持しつつ四つの保持手段21…を一体的にして回転させることができる。従って、交換後の金型の型の配置が交換前の金型M1,M2の型の配置に対して傾いた配置になっても、四つの成形品M…を確実に保持することができる。
【0102】
特に、前記支持アーム3は、行R1,R2及び列F1,F2が異なる保持手段21…の成形品Mの保持中心同士を結ぶ二本の仮想線VL,VLの交点が回転中心になるように基端部がユニットベース20に枢結されているため、型の配置の異なる金型に交換されても、ロボットアームRAのティーチング(動作設定)を行うことなく、保持手段21…の行R1,R2単位又は列F1,F2単位での配置の変更、或いは装置ユニット2の回転による保持手段21…全体の配置の変更だけで成形品M…を各保持手段21…で保持できる状態にできる。
【0103】
なお、本発明の射出成形品自動取出ロボット用の成形品保持装置は、上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で適宜変更を加え得ることは勿論のことである。
【0104】
上記実施形態において、装置ユニット2(ユニットベース20)に支持アーム3を枢結させ、該支持アーム3(ロボットアーム連結部31)をロボットアームRAに連結するようにしたが、これに限定されるものではなく、例えば、装置ユニット2(例えば、ユニットベース20)にロボットアーム連結部31を設け、ロボットアームRAに装置ユニット2を直接連結するようにしてもよい。但し、保持手段21…の配置を調整するに当たって、装置ユニット2を回転可能にすることが好ましいことは言うまでもない。
【0105】
上記実施形態において、射出成形機で四つの成形品M…を成形し、その成形品M…が金型M1,M2の分割面上で二行二列のマトリックス状に配置された状態で残ることを前提に、装置ユニット2を一つ設けるようにしたが、これに限定されるものではなく、例えば、射出成形機で四の倍数の数の成形品M…を成形し、その成形品M…が金型M1,M2の分割面上で二行多列のマトリックス状に配置された状態で残る場合、図7に示す如く、保持手段21…の数が成形品M…の数と対応するように四つの保持手段21…を備えた装置ユニット2を複数設け、複数の保持手段21…の配置が二行多列になるように複数の装置ユニット2…を横並びに配置したものであってもよい。
【0106】
この場合、隣り合う装置ユニット2,2を相対的に接離させるためのユニット用作動手段5を設けることが好ましい。かかるユニット用作動手段5は、例えば、一端側に正ネジが形成される一方、他端側に逆ネジが形成された両ネジボルト50を採用し、その両ネジボルト50の一端側を一方の装置ユニット2(例えば枠体200)に螺合させ、他端側を他方の装置ユニット2(例えば、枠体200)に螺合させるようにしてもよい。このようにすれば、両ネジボルト50を軸線周りで回転させることで隣り合う二つの装置ユニット2が両ネジボルト50に沿って接離することになるため、異なる装置ユニット2の保持手段21…同士の間隔を調整することができる。
【0107】
また、装置ユニット2同士を直接両ネジボルト50で連結するものに限定されるものではなく、例えば、図7に示す如く、装置ユニット2のそれぞれに支持アーム3を枢結し、一方の装置ユニット2に枢結された支持アーム3に両ネジボルト50の一端側を螺合させ、他方の装置ユニット2に枢結された支持アーム3に両ネジボルト50の他端側を螺合させるようにしてもよい。
【0108】
そして、装置ユニット2同士を直接両ネジボルト50で連結する場合、及び装置ユニット2に枢結した支持アーム3同士を両ネジボルト50で連結する場合の何れにおいても、両ネジボルト50を支持し、装置ユニット2又は支持アーム3の両ネジボルト50周りの回り止めが可能なベース51を設けることが好ましい。また、前記ベース51を設ける場合、該ベース51に支持アーム52を枢結し、その支持アーム52をロボットアームRAに連結するようにしてもよい。
【0109】
そして、上記実施形態において、仮装線VL,VLの交点上で支持アーム3の基端部を枢結したが、これに限定されるものではなく、例えば、ベース51と装置ユニット2とを連結する支持アーム3を設ける場合、仮装線VL,VLの交点以外の箇所(装置ユニット2の何れかの箇所)に支持アーム3の基端部を枢結してもよい。また、上述の如く、装置ユニット2を支持するベース51を設け、該ベース51に支持アーム52の基端部を枢結する場合も、仮装線VL,VLの交点以外の箇所(装置ユニット2の何れかの箇所)に支持アーム3の基端部を枢結してもよい。但し、支持アーム3,52を設ける場合、上記実施形態と同様に、仮装線VL,VLの交点上で支持アーム3の基端部を枢結することが好ましいことは言うまでもない。
【0110】
上記実施形態において、一対の第一案内体220,220の両方を連動させて移動させるべく、第一正ネジ221a及び第一逆ネジ221bの形成された第一案内ネジ221を設けたが、これに限定されるものではなく、例えば、各第一案内体220,220を独立して移動可能に構成してもよい。すなわち、枠体200の第一枠部200a,200aに貫通状態でボルトを螺合させ、枠体200内にあるボルトの先端を第一案内体220,220に対して該ボルトの軸線回りで回転自在に連結してもよい。このようにすれば、ボルトを回転させることで該ボルトに連結された第一案内体220,220がボルトの軸線方向に移動することになるため、一対の案内体を相対的に接離させることができる。但し、このようにすれば、保持手段21…を移動させたときに、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点が移動することになるため、ロボットアームRAの動作設定を行う必要があることから、上記実施形態の構成にすることが好ましいことは言うまでもない。
【0111】
上記実施形態において、一対の第二案内体230,230の両方を連動させて移動させるべく、第二正ネジ231a及び第二逆ネジ231bの形成された第二案内ネジ231を設けたが、これに限定されるものではなく、例えば、各第二案内体230,230を独立して移動可能に構成してもよい。すなわち、枠体200の第二枠部200b,200bに貫通状態でボルトを螺合させ、枠体200内にあるボルトの先端を第二案内体230,230に対して該ボルトの軸線回りで回転自在に連結してもよい。
【0112】
このようにすれば、ボルトを回転させることで該ボルトに連結された第二案内体230,230がボルトの軸線方向に移動することになるため、一対の案内体を相対的に接離させることができる。但し、このようにすれば、保持手段21…を移動させたときに、列F1,F2及び行R1,R2が異なる保持手段21…の成形品M…の保持中心同士を結ぶ二本の仮想線VL,VLの交点が移動することになるため、ロボットアームRAの動作設定を行う必要があることから、上記実施形態と同様の構成にすることが好ましいことは言うまでもない。
【0113】
上記実施形態において、第一案内ネジ221で一対の第一案内体220,220を接離させるようにしたが、第一作動手段22はこれに限定されるものではなく、例えば、各一案内体に対して該第一案内体220,220と直交する方向に延びる別個独立したラックを取り付け、各ラックに対して噛合する歯車を設けるとともに、各ラックに噛合する二つの歯車の回転方向が逆方向になるように、該二つの歯車の間に偶数個の伝達歯車を設けるようにしてもよい。このようにすれば、何れかの歯車を回転させることで、各ラックに噛合する二つの歯車が逆方向に回転して各ラックを逆方向(相反する方向)に移動させることができるため、上記実施形態と同様の態様で一対の第一案内体220,220(異なる列F1,F2の保持手段21…)同士を接離させることができる。
【0114】
また、上記実施形態において、第二案内ネジ231で一対の第二案内体230,230を接離させるようにしたが、第二作動手段23はこれに限定されるものではなく、例えば、第一作動手段22と同様に、各一案内体に対して該第二案内体230,230と直交する方向に延びる別個独立したラックを取り付け、各ラックに対して噛合する歯車を設けるとともに、各ラックに噛合する二つの歯車の回転方向が逆方向になるように、該二つの歯車の間に偶数個の伝達歯車を設けるようにしてもよい。このようにすれば、何れかの歯車を回転させることで、各ラックに噛合する二つの歯車が逆方向に回転して各ラックを逆方向(相反する方向)に移動させることができるため、上記実施形態と同様の態様で一対の第二案内体230,230(異なる行R1,R2の保持手段21…)を接離させることができる。
【0115】
上記実施形態において、第一案内体220の長手方向の両側に一対の第一スリット222を設け、第二案内体230の長手方向の両側に一対の第二スリット232を設けたが、これに限定されるものではなく、例えば、第一案内体220の長手方向の一端側から他端側にかけて長手をなす長穴を第一スリット222として形成し、第二案内体230の長手方向の一端側から他端側にかけて長手をなす長穴を第二スリット232として形成してもよい。また、第一案内体220又は第二案内体230の何れか一方に対し、一端側から他端側に長手をなす長穴を形成して第一スリット222又は第二スリット232とし、第一案内体220又は第二案内体230の何れか他方に対し、長手方向の両側に一対の長穴又は溝を形成して、一対の第一スリット222又は一対の第二スリット232としてもよい。何れの場合においても、第一スリット222及び第二スリット232の重なる軸挿通領域SAに案内軸215(軸本体215a)を挿通すれば、第一作動手段22及び第二作動手段23を操作することで、上記実施形態と同様に保持手段21を行方向及び列方向に移動させることができる。
【0116】
上記実施形態において、支持プレート214を介して案内軸215を保持手段21に連設するようにしたが、これに限定されるものではなく、例えば、保持手段21のアクチュエータ211に案内軸215を直接連設するようにしても勿論よい。
【0117】
また、上記実施形態において、保持手段21として互いに接離可能な一対の挟持爪210,210を備えたグリップ手段を採用したが、これに限定されるものではなく、例えば、保持手段21は、成形品を吸引可能な吸着パッドで構成してもよい。
【符号の説明】
【0118】
1…保持装置、2…装置ユニット、3…支持アーム、4…位置決手段、5…ユニット用作動手段、20…ユニットベース、21…保持手段、22…第一作動手段、23…第二作動手段、30…アーム本体、31…ロボットアーム連結部、40…ガイド体、41…押しネジ、50…両ネジボルト、51…ベース、52…支持アーム、200…枠体、200a…第一枠部、200b…第二枠部、201,202…補強部材、201a,202a…第一帯状部、201b,202b…第二帯状部、210…挟持爪、210a…挟持部、210b…アクチュエータ連結部、210c…凸部、211…エアシリンダ(アクチュエータ)、211a…出力部、211b…凹部、212…ネジ部材、213…支持体、214…支持プレート、214a…取付ベース部、214b…ベース支持部、215…案内軸、215a…軸本体、215b…鍔部、215c…雄ネジ部、220…第一案内体、221…第一案内ネジ、221a…第一正ネジ、221b…第一逆ネジ、222…第一スリット、223…第一案内部、224…第一ネジ穴、230…第二案内体、231…第二案内ネジ、231a…第二正ネジ、231b…第二逆ネジ、232…第二スリット、233…第二案内部、234…第二ネジ穴、B…ネジ部材、N…ノックピン、CS…保持面、CS1,CS2…傾斜面、S…センサ、F1,F2…列、R1,R2…行、SA…軸挿通領域、VL…仮想線、FA…成形品取出可能位置、FB…成形品取出位置、WP…待機位置、M…成形品、M1,M2…金型、R…射出成形品自動取出ロボット、RA…ロボットアーム
【特許請求の範囲】
【請求項1】
射出成形機に対して交換可能に装備された少なくとも二つの金型の分割面同士が離間した状態で、何れか一つの金型の分割面から対向する金型に向けて突出し、且つ該分割面上で二行多列のマトリックス状に配置された四つ又は四の倍数の数の成形品を取り出すべく、成形品を保持可能な保持手段が金型上の成形品の配置に対応して二行多列で配置される射出成形品自動取出ロボット用の成形品保持装置であって、射出成形品自動取出ロボットのロボットアームに対して直接的又は間接的に連結されるユニットベースと、該ユニットベース上に平面的に二行二列で配置された四つの保持手段とを有する装置ユニットを少なくとも一つ備え、装置ユニットは、異なる行の保持手段同士を列方向で相対的に接離させる第一作動手段と、異なる列の保持手段同士を行方向で相対的に接離させる第二作動手段とを備えていることを特徴とする射出成形品自動取出ロボット用の成形品保持装置。
【請求項2】
各保持手段は、互いに接離可能に設けられた一対の挟持爪を備え、各保持手段の一対の挟持爪は、先端が他の行及び他の列に属する保持手段側に向くように配置されるとともに、対向する相手方の挟持爪と対向する面とは反対側の面が先端に向かうにつれて相手方の挟持爪側に近づくように形成されている請求項1に記載の射出成形品自動取出ロボット用の成形品保持装置。
【請求項3】
前記第一作動手段は、各行に沿って配置された一対の第一案内体と、該一対の第一案内体に跨るように配置された第一案内ネジとで構成され、各第一案内体は、少なくとも一端側及び他端側に行に沿って延び且つ一方の面側から反対の他方の面側に貫通した第一スリットが形成され、第一案内ネジは、軸線方向の中央側から一端に向けて一方の第一案内体に螺合する第一正ネジが形成される一方、前記中央側から他端に向けて他方の第一案内体に螺合する第一逆ネジが形成され、前記第二作動手段は、前記一対の第一案内体に跨るように各列に沿って配置された一対の第二案内体と、該一対の第二案内体に跨るように配置された第二案内ネジとで構成され、各第二案内体は、少なくとも一端側及び他端側に列に沿って延び且つ一方の面側から反対の他方の面側に貫通した第二スリットが形成され、第二案内ネジは、軸線方向の中央側から一端に向けて一方の第二案内体に螺合する第二正ネジが形成される一方、前記中央側から他端に向けて他方の第二案内体に螺合する第二逆ネジが形成され、各保持手段は、第一スリットと第二スリットとの重複領域に挿入される案内軸が直接的又は間接的に連設されている請求項1又は2に記載の射出成形品自動取出ロボット用の成形品保持装置。
【請求項4】
金型の分割面上で二行二列のマトリックス状に配置された四つの成形品を取り出すことを前提に、前記ユニットベースに基端部が枢結された支持アームをさらに備え、該支持アームは、先端側がロボットアームに連結可能に構成されている請求項1乃至3の何れか1項に記載の射出成形品自動取出ロボット用の成形品保持装置。
【請求項5】
前記支持アームは、列及び行が異なる保持手段の成形品の保持中心同士を結ぶ二本の仮想線の交点が回転中心になるように基端部がユニットベースに枢結されている請求項4に記載の射出成形品自動取出ロボット用の成形品保持装置。
【請求項1】
射出成形機に対して交換可能に装備された少なくとも二つの金型の分割面同士が離間した状態で、何れか一つの金型の分割面から対向する金型に向けて突出し、且つ該分割面上で二行多列のマトリックス状に配置された四つ又は四の倍数の数の成形品を取り出すべく、成形品を保持可能な保持手段が金型上の成形品の配置に対応して二行多列で配置される射出成形品自動取出ロボット用の成形品保持装置であって、射出成形品自動取出ロボットのロボットアームに対して直接的又は間接的に連結されるユニットベースと、該ユニットベース上に平面的に二行二列で配置された四つの保持手段とを有する装置ユニットを少なくとも一つ備え、装置ユニットは、異なる行の保持手段同士を列方向で相対的に接離させる第一作動手段と、異なる列の保持手段同士を行方向で相対的に接離させる第二作動手段とを備えていることを特徴とする射出成形品自動取出ロボット用の成形品保持装置。
【請求項2】
各保持手段は、互いに接離可能に設けられた一対の挟持爪を備え、各保持手段の一対の挟持爪は、先端が他の行及び他の列に属する保持手段側に向くように配置されるとともに、対向する相手方の挟持爪と対向する面とは反対側の面が先端に向かうにつれて相手方の挟持爪側に近づくように形成されている請求項1に記載の射出成形品自動取出ロボット用の成形品保持装置。
【請求項3】
前記第一作動手段は、各行に沿って配置された一対の第一案内体と、該一対の第一案内体に跨るように配置された第一案内ネジとで構成され、各第一案内体は、少なくとも一端側及び他端側に行に沿って延び且つ一方の面側から反対の他方の面側に貫通した第一スリットが形成され、第一案内ネジは、軸線方向の中央側から一端に向けて一方の第一案内体に螺合する第一正ネジが形成される一方、前記中央側から他端に向けて他方の第一案内体に螺合する第一逆ネジが形成され、前記第二作動手段は、前記一対の第一案内体に跨るように各列に沿って配置された一対の第二案内体と、該一対の第二案内体に跨るように配置された第二案内ネジとで構成され、各第二案内体は、少なくとも一端側及び他端側に列に沿って延び且つ一方の面側から反対の他方の面側に貫通した第二スリットが形成され、第二案内ネジは、軸線方向の中央側から一端に向けて一方の第二案内体に螺合する第二正ネジが形成される一方、前記中央側から他端に向けて他方の第二案内体に螺合する第二逆ネジが形成され、各保持手段は、第一スリットと第二スリットとの重複領域に挿入される案内軸が直接的又は間接的に連設されている請求項1又は2に記載の射出成形品自動取出ロボット用の成形品保持装置。
【請求項4】
金型の分割面上で二行二列のマトリックス状に配置された四つの成形品を取り出すことを前提に、前記ユニットベースに基端部が枢結された支持アームをさらに備え、該支持アームは、先端側がロボットアームに連結可能に構成されている請求項1乃至3の何れか1項に記載の射出成形品自動取出ロボット用の成形品保持装置。
【請求項5】
前記支持アームは、列及び行が異なる保持手段の成形品の保持中心同士を結ぶ二本の仮想線の交点が回転中心になるように基端部がユニットベースに枢結されている請求項4に記載の射出成形品自動取出ロボット用の成形品保持装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−20450(P2012−20450A)
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2010−159071(P2010−159071)
【出願日】平成22年7月13日(2010.7.13)
【特許番号】特許第4806783号(P4806783)
【特許公報発行日】平成23年11月2日(2011.11.2)
【出願人】(000005061)バンドー化学株式会社 (429)
【出願人】(591056547)ビー・エル・オートテック株式会社 (20)
【Fターム(参考)】
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成22年7月13日(2010.7.13)
【特許番号】特許第4806783号(P4806783)
【特許公報発行日】平成23年11月2日(2011.11.2)
【出願人】(000005061)バンドー化学株式会社 (429)
【出願人】(591056547)ビー・エル・オートテック株式会社 (20)
【Fターム(参考)】
[ Back to top ]