
射出成形機
【課題】センサを用いて型厚調整を適切に監視しつつ、不要な警報等を抑制すること
【解決手段】射出成形機は、フレームと、固定金型が取り付けられる第1の固定部材と第1の固定部材と対向して配設され、センターロッドが貫通する第2の固定部材と、可動金型が取り付けられる第1の可動部材と、第1の可動部材とセンターロッドで連結される第2の可動部材と、センターロッドを第2の可動部材に対して移動させる型厚調整機構と、センターロッドとフレームとの位置関係を表す情報を取得するセンサと、センサの検出結果に基づく所定警報出力条件が満たされた場合に、警報を出力する制御装置とを備え、制御装置は、所定条件が満たされた場合に、警報を抑制する。
【解決手段】射出成形機は、フレームと、固定金型が取り付けられる第1の固定部材と第1の固定部材と対向して配設され、センターロッドが貫通する第2の固定部材と、可動金型が取り付けられる第1の可動部材と、第1の可動部材とセンターロッドで連結される第2の可動部材と、センターロッドを第2の可動部材に対して移動させる型厚調整機構と、センターロッドとフレームとの位置関係を表す情報を取得するセンサと、センサの検出結果に基づく所定警報出力条件が満たされた場合に、警報を出力する制御装置とを備え、制御装置は、所定条件が満たされた場合に、警報を抑制する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、型締め動作を駆動する電磁石を備える射出成形機に関する。
【背景技術】
【0002】
従来、射出成形機においては、樹脂を射出装置の射出ノズルから射出して固定金型と可動金型との間のキャビティ空間に充填(てん)し、固化させることによって成形品を得るようになっている。そして、固定金型に対して可動金型を移動させて型閉じ、型締め及び型開きを行うために型締装置が配設される。
【0003】
該型締装置には、油圧シリンダに油を供給することによって駆動される油圧式の型締装置、及び電動機によって駆動される電動式の型締装置があるが、該電動式の型締装置は、制御性が高く、周辺を汚すことがなく、かつ、エネルギー効率が高いので、多く利用されている。この場合、電動機を駆動することによってボールねじを回転させて推力を発生させ、該推力をトグル機構によって拡大し、大きな型締力を発生させるようにしている。
【0004】
ところが、構成の電動式の型締装置においては、トグル機構を使用するようになっているので、該トグル機構の特性上、型締力を変更することが困難であり、応答性及び安定性が悪く、成形中に型締力を制御することができない。そこで、ボールねじによって発生させられた推力を直接型締力として使用することができるようにした型締装置が提供されている。この場合、電動機のトルクと型締力とが比例するので、成形中に型締力を制御することができる。
【0005】
しかしながら、従来の型締装置においては、ボールねじの耐荷重性が低く、大きな型締力を発生させることができないだけでなく、電動機に発生するトルクリップルによって型締力が変動してしまう。また、型締力を発生させるために、電動機に電流を常時供給する必要があり、電動機の消費電力量及び発熱量が多くなるので、電動機の定格出力をその分大きくする必要があり、型締装置のコストが高くなってしまう。
【0006】
そこで、型開閉動作にはリニアモータを使用し、型締動作には電磁石の吸着力を利用した型締装置が考えられる(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】国際公開第05/090052号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、特許文献1に記載されるような電磁石の吸着力を利用した型締装置を使用する構成においては、例えばトグル式の構成と同様、金型装置の厚さの変化に対応できるように、型厚調整機構が設けられる。型厚調整の際、上限値又は下限値を越えて型厚調整が実行されないようにするために、フレーム等にセンサを設けて、フレームに対するセンターロッドの位置を監視することが有用である。
【0009】
しかしながら、かかるセンサは、型開閉動作時のセンターロッドの動きに伴って反応し、不必要な警報の原因となる虞がある。
【0010】
そこで、本発明は、センサを用いて型厚調整を適切に監視しつつ、不要な警報等を抑制することができる射出成形機の提供を目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するため、本発明の一局面によれば、フレームと、
固定金型が取り付けられる第1の固定部材と、
前記第1の固定部材と対向して配設され、センターロッドが貫通する第2の固定部材と、
可動金型が取り付けられる第1の可動部材と、
前記第1の可動部材と前記センターロッドで連結されて前記第1の可動部材と共に移動する第2の可動部材であって、前記第2の固定部材と協動して、電磁石による吸着力で型締力を発生させる型締力発生機構を構成する第2の可動部材と、
前記センターロッドを前記第2の可動部材に対して移動させることで、第1の可動部材と前記第2の可動部材との間の距離を調整する型厚調整機構と、
前記センターロッドと前記フレームとの位置関係を表す情報を取得するセンサと、
前記センサの検出結果に基づく所定警報出力条件が満たされた場合に、警報を出力する制御装置と、
を備え、
前記制御装置は、所定条件が満たされた場合に、前記警報を抑制するように構成されることを特徴とする、射出成形機が提供される。
【発明の効果】
【0012】
本発明によれば、センサを用いて型厚調整を適切に監視しつつ、不要な警報等を抑制することができる射出成形機が得られる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施の形態の射出成形機における型締装置の型閉じ時の状態を示す図である。
【図2】本発明の実施の形態の射出成形機における型締装置の型開き時の状態を示す図である。
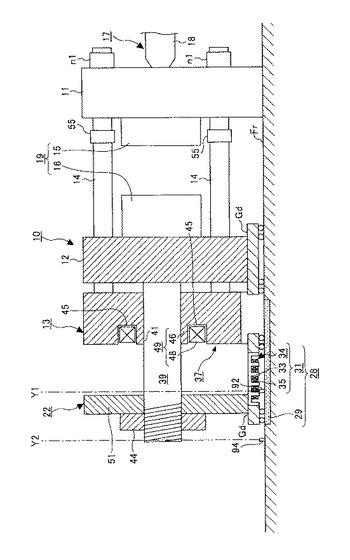
【図3】型厚調整機構44の一例を示す断面図である。
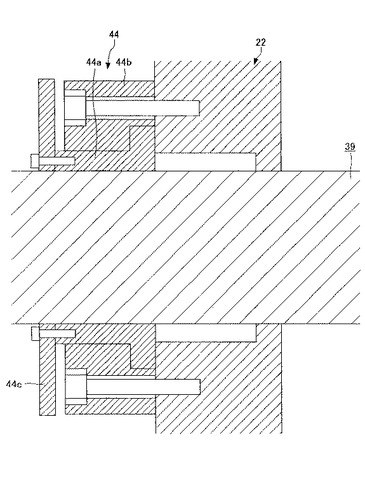
【図4】型厚調整監視部63により実行される主要制御の一例を示すフローチャートである。
【発明を実施するための形態】
【0014】
以下、図面を参照して、本発明を実施するための最良の形態の説明を行う。尚、本実施の形態において、型締装置については、型閉じを行う際の可動プラテンの移動方向を前方とし、型開きを行う際の可動プラテンの移動方向を後方とし、射出装置については、射出を行う際のスクリューの移動方向を前方とし、計量を行う際のスクリューの移動方向を後方として説明する。
【0015】
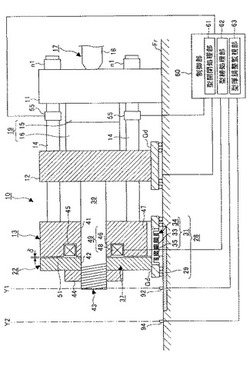
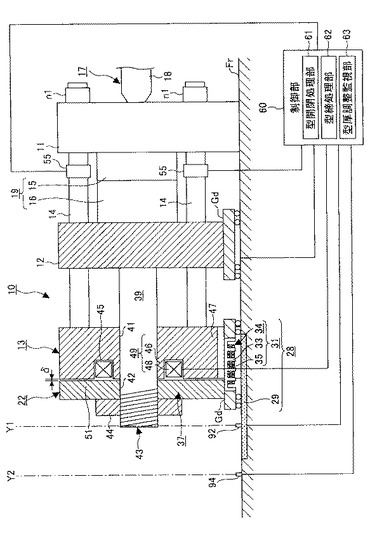
図1は本発明の実施の形態の射出成形機における型締装置の型閉じ時の状態を示す図、図2は本発明の実施の形態の射出成形機における型締装置の型開き時の状態を示す図である。尚、図1及び図2において、ハッチングを付された部材は主要断面を示す。
【0016】
図において、10は型締装置、Frは射出成形機のフレーム(架台)、Gdは、該フレームFrに対して可動なガイド、11は、図示されないガイド上又はフレームFr上に載置された固定プラテンであり、該固定プラテン11と所定の間隔を置いて、かつ、固定プラテン11と対向させてリヤプラテン13が配設され、固定プラテン11とリヤプラテン13との間に4本のタイバー14(図においては、4本のタイバー14のうちの2本だけを示す。)が架設される。尚、リヤプラテン13は、フレームFrに対して固定される。
【0017】
タイバー14の前端部(図において右端部)にはネジ部(図示せず)が形成され、該ネジ部にナットn1を螺合して締め付けることによって、タイバー14の前端部が固定プラテン11に固定される。タイバー14の後端部はリヤプラテン13に固定される。
【0018】
そして、タイバー14に沿って固定プラテン11と対向させて可動プラテン12が型開閉方向に進退自在に配設される。そのために、可動プラテン12がガイドGdに固定され、可動プラテン12におけるタイバー14と対応する箇所にタイバー14を貫通させるための図示されないガイド穴又は切欠き部が形成される。尚、ガイドGdには、後述の吸着板22も固定される。ガイドGdは、図示のように、吸着板22と可動プラテン12のそれぞれに対して別々に設けられてもよいし、吸着板22と可動プラテン12に対して共通の一体物により構成されてもよい。
【0019】
また、固定プラテン11には固定金型15が、可動プラテン12には可動金型16がそれぞれ固定され、可動プラテン12の進退に伴って固定金型15と可動金型16とが接離させられ、型閉じ、型締め及び型開きが行われる。尚、型締めが行われるのに伴って、固定金型15と可動金型16との間に図示されないキャビティ空間が形成され、射出装置17の射出ノズル18から射出された図示されない樹脂がキャビティ空間に充墳される。また、固定金型15及び可動金型16によって金型装置19が構成される。
【0020】
吸着板22は、可動プラテン12と平行にガイドGdに固定される。これにより、吸着板22は、リヤプラテン13より後方において進退自在となる。吸着板22は、磁性材料で形成されてよい。例えば、吸着板22は、強磁性体から成る薄板を積層することによって形成される電磁積層鋼板により構成されてもよい。或いは、吸着板22は、鋳造により形成されてもよい。
【0021】
リニアモータ28は、可動プラテン12を進退させるため、ガイドGdに設けられる。リニアモータ28は、固定子29、及び可動子31を備え、固定子29は、フレームFr上において、ガイドGdと平行に、かつ、可動プラテン12の移動範囲に対応させて形成され、可動子31は、可動プラテン12の下端において、固定子29と対向させて、かつ、所定の範囲にわたって形成される。
【0022】
可動子31は、コア34及びコイル35を備える。そして、コア34は、固定子29に向けて突出させて、所定のピッチで形成された複数の磁極歯33を備え、コイル35は、各磁極歯33に巻装される。尚、磁極歯33は可動プラテン12の移動方向に対して直角の方向に、互いに平行に形成される。また、固定子29は、図示されないコア、及び該コア上に延在させて形成された図示されない永久磁石を備える。該永久磁石は、N極及びS極の各磁極を交互に着磁させることによって形成される。コイル35に所定の電流を供給することによってリニアモータ28を駆動すると、可動子31が進退させられ、それに伴って、ガイドGdにより可動プラテン12が進退させられ、型閉じ及び型開きを行うことができる。
【0023】
尚、本実施の形態においては、固定子29に永久磁石を、可動子31にコイル35を配設するようになっているが、固定子にコイルを、可動子に永久磁石を配設することもできる。その場合、リニアモータ28が駆動されるのに伴って、コイルが移動しないので、コイルに電力を供給するための配線を容易に行うことができる。
【0024】
尚、ガイドGdに可動プラテン12と吸着板22を固定する構成に限られず、可動プラテン12又は吸着板22にリニアモータ28の可動子31を設ける構成としてもよい。また、型開閉機構としては、リニアモータ28に限定されず、油圧式や電動式等であってもよい。
【0025】
可動プラテン12が前進させられて可動金型16が固定金型15に当接すると、型閉じが行われ、続いて、型締めが行われる。リヤプラテン13と吸着板22との間に、型締めを行うための電磁石ユニット37が配設される。また、リヤプラテン13及び吸着板22を貫通して延び、かつ、可動プラテン12と吸着板22とを連結するセンターロッド39が進退自在に配設される。該センターロッド39は、型閉じ時及び型開き時に、可動プラテン12の進退に連動させて吸着板22を進退させ、型締め時に、電磁石ユニット37によって発生させられた吸着力を可動プラテン12に伝達する。
【0026】
尚、固定プラテン11、可動プラテン12、リヤプラテン13、吸着板22、リニアモータ28、電磁石ユニット37、センターロッド39等によって型締装置10が構成される。
【0027】
電磁石ユニット37は、リヤプラテン13側に形成された電磁石49、及び吸着板22側に形成された吸着部51からなる。また、リヤプラテン13の後端面の所定の部分、本実施の形態においては、センターロッド39まわりに溝45が形成され、溝45よりも内側にコア46、及び溝45よりも外側にヨーク47が形成される。そして、溝45内でコア46まわりにコイル48が巻装される。尚、コア46及びヨーク47は、鋳物の一体構造で構成されるが、強磁性体から成る薄板を積層することによって形成され、電磁積層鋼板を構成してもよい。
【0028】
尚、本実施の形態において、リヤプラテン13とは別に電磁石49が、吸着板22とは別に吸着部51が形成されもよいし、リヤプラテン13の一部として電磁石を、吸着板22の一部として吸着部を形成してもよい。また、電磁石と吸着部の配置は、逆であってもよい。例えば、吸着板22側に電磁石49を設け、リヤプラテン13側に吸着部を設けてもよい。
【0029】
電磁石ユニット37において、コイル48に電流を供給すると、電磁石49が駆動され、吸着部51を吸着し、型締力を発生させることができる。
【0030】
センターロッド39は、後端部において吸着板22と連結させて、前端部において可動プラテン12と連結させて配設される。したがって、センターロッド39は、型閉じ時に可動プラテン12と共に前進させられて吸着板22を前進させ、型開き時に可動プラテン12と共に後退させられて吸着板22を後退させる。そのために、リヤプラテン13の中央部分に、センターロッド39を貫通させるための穴41が形成される。
【0031】
型締装置10のリニアモータ28及び電磁石49の駆動は、制御部60によって制御される。制御部60は、CPU及びメモリ等を備え、CPUによって演算された結果に応じて、リニアモータ28のコイル35や電磁石49のコイル48に電流を供給するための回路も備える。制御部60には、また、荷重検出器55が接続される。荷重検出器55は、型締装置10において、少なくとも1本のタイバー14の所定の位置(固定プラテン11とリヤプラテン13との間における所定の位置)に設置され、当該タイバー14にかかる荷重を検出する。図中では、上下二本のタイバー14に荷重検出器55が設置された例が示されている。荷重検出器55は、例えば、タイバー14の伸び量を検出するセンサによって構成される。荷重検出器55によって検出された荷重(歪)は、制御部60に送られる。制御部60は、荷重検出器55の出力に基づいて、型締力を検出する。尚、制御部60は、図2においては便宜上省略されている。
【0032】
次に、型締装置10の動作について説明する。
【0033】
制御部60の型開閉処理部61によって型閉じ工程が制御される。図2の状態(型開き時の状態)において、型開閉処理部61は、コイル35に電流を供給する。続いて、リニアモータ28が駆動され、可動プラテン12が前進させられ、図1に示されるように、可動金型16が固定金型15に当接させられる。このとき、リヤプラテン13と吸着板22との間、すなわち、電磁石49と吸着部51との間には、ギャップδが形成される。尚、型閉じに必要とされる力は、型締力と比較されて十分に小さくされる。
【0034】
続いて、制御部60の型締処理部62は、型締工程を制御する。型締処理部62は、コイル48に電流を供給し、吸着部51を電磁石49の吸着力によって吸着する。それに伴って、吸着板22及びセンターロッド39を介して型締力が可動プラテン12に伝達され、型締めが行われる。型締め開始時等、型締力を変化させる際に、型締処理部62は、当該変化によって得るべき目標となる型締力、すなわち、定常状態で目標とする型締力を発生させるために必要な定常的な電流の値をコイル48に供給するように制御している。
【0035】
尚、型締力は荷重検出器55によって検出される。検出された型締力は制御部60に送られ、制御部60において、型締力が設定値になるようにコイル48に供給される電流が調整され、フィードバック制御が行われる。この間、射出装置17において溶融させられた樹脂が射出ノズル18から射出され、金型装置19のキャビティ空間に充墳される。
【0036】
キャビティ空間内の樹脂が冷却されて固化すると、型開閉処理部61は、型開き工程を制御する。型締処理部62は、図1の状態において、コイル48への電流の供給を停止する。それに伴って、リニアモータ28が駆動され、可動プラテン12が後退させられ、図2に示されるように、可動金型16が後退限位置に置かれ、型開きが行われる。
【0037】
次に、型厚調整に関連した構成について説明する。
【0038】
吸着板22の後方側には、型厚調整機構44が設けられる。型厚調整機構44は、金型装置19の厚さに対応させて、可動プラテン12と吸着板22との相対的な位置(即ちこれらの間の距離)を調整する機構である。型厚調整機構44の構成自体は任意であってよい。例えば、型厚調整機構44は、図示しない型厚調整用モータにより吸着板22に対するセンターロッド39の位置を可変する。これにより、吸着板22に対するセンターロッド39の位置が調整され、固定プラテン11に対する可動プラテン12の位置が調整される。すなわち、可動プラテン12と吸着板22との相対的な位置を変えることによって、型厚の調整が行われる。
【0039】
図3は、型厚調整機構44の一例を示す断面図である。図3に示す例では、吸着板22の背後は、型厚調整機構44のナット押さえ部材44bが締結される。ナット押さえ部材44bは、センターロッド39の周面に形成されたねじ(図示せず)に噛み合うナット44aを保持する。型厚調整は、吸着板22が位置保持された状態で実行されてよい。吸着板22の位置保持は、リニアモータ28の制御により実現されてもよいし、機械的にロックされることで実現されてもよい。型厚調整機構44は、図示しない型厚調整用モータにより、ナット44aに結合されたギア44cを回転させることで、吸着板22に対するセンターロッド39の位置を可変する。これにより、吸着板22に対するセンターロッド39の位置が調整され、固定プラテン11に対する可動プラテン12の位置が調整され、型厚の調整が行われる。尚、前提として、成形工程中は、型厚調整用モータを作動されず、吸着板22に対するセンターロッド39の位置は基本的に変化しない(即ち、調整された状態が維持される)。
【0040】
図1及び図2を再度参照するに、フレームFrには、センターロッド39の位置を検出するセンサ92,94が設けられる。センサ92は、センターロッド39の後端がフレームFrの第1基準位置Y1よりも前方(固定プラテン11に近づく側)に来た場合に、その旨の検出信号(以下、第1検出信号という)を発生する。センサ94は、センターロッド39の後端がフレームFrの第2基準位置Y2よりも後方に来た場合に、その旨の検出信号(以下、第2検出信号という)を発生する。第1基準位置Y1及び第2基準位置Y2は、型厚調整機構44による型厚調整範囲の限界値に対応する。即ち、第1基準位置Y1及び第2基準位置Y2は、それぞれ、型厚調整範囲の下限値及び上限値が実現されたときのセンターロッド39の後端の各位置に対応する。型厚調整範囲の限界値に対応する第1基準位置Y1及び第2基準位置Y2は、型厚調整を行う際の吸着板22の位置(例えばリヤプラテン13と吸着板22との間の距離)に応じて変化するので、型厚調整を行う際の吸着板22の位置に基づいて決定されてよい。従って、センサ92,94の各位置は、型厚調整を行う際の吸着板22の位置に基づいて決定されてよい。
【0041】
センサ92,94は、磁気式や光学式、機械式のような任意の方式で、センターロッド39の位置を検出するものであってよい。例えば、センサ92,94は、光学式であり、第1基準位置Y1及び第2基準位置Y2のそれぞれにおける鉛直面内で、センターロッド39に向けて光を発し、その反射光又は通過光の受信の有無に基づいて、センターロッド39の位置を検出するものであってよい。例えば、センターロッド39が第1基準位置Y1よりも後方に位置するときは、センサ92は反射光を受信し(又は透過光を受信せず)、センターロッド39が第1基準位置Y1よりも前方に位置するときは、センサ92は反射光を受信しない(又は透過光を受信する)。この場合、センサ92は、反射光を受信しない(又は透過光を受信する)間、第1検出信号を出力する。同様に、センターロッド39が第2基準位置Y2よりも後方に位置するときは、センサ94は反射光を受信し(又は透過光を受信せず)、センターロッド39が第2基準位置Y2よりも前方に位置するときは、センサ94は反射光を受信しない(又は透過光を受信する)。この場合、センサ94は、反射光を受信する(又は透過光を受信しない)間、第2検出信号を出力する。
【0042】
尚、型厚調整は、リヤプラテン13と吸着板22との間にギャップδが維持された状態(図1参照)で実行されてもよい。図1に示す状態では、センターロッド39の後端が第1基準位置Y1と第2基準位置Y2の間に位置するので、型厚調整範囲内で型厚調整が実現されていることになる。
【0043】
次に、制御部60の型厚調整監視部63による動作について説明する。
【0044】
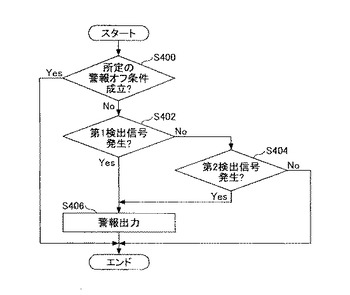
図4は、型厚調整監視部63により実行される主要制御の一例を示すフローチャートである。図4に示す処理ルーチンは、射出成形機の稼働中(電源オン中)に所定周期毎に繰り返し実行されてもよい。制御部60の型厚調整監視部63には、センサ92,94の出力信号が入力される。
【0045】
ステップ400では、所定の警報オフ条件が満たされているか否かが判定される。所定の警報オフ条件は、後述のセンサ92,94からの信号に基づく警報(ステップ406参照)をオフする条件である。所定の警報オフ条件は、後述のセンサ92,94からの信号に基づく警報が型厚調整時に行うべき警報である点を考慮して、それ以外の作業時又は動作時に警報が出力されないように設定されてよい。例えば、所定の警報オフ条件は、型厚調整が実施されていない場合に成立する条件であってよい。この場合、型厚調整が実施されているか否かは、型厚調整の際の制御信号の有無(例えば、型厚調整用モータへの駆動信号の有無)に基づいて判断されてもよい。或いは、所定の警報オフ条件は、ユーザからの警報オフ指示が入力された場合に成立する条件であってよい。ユーザからの警報オフ指示は、任意のユーザインターフェース(例えば、オン/オフボタン)を介して制御部60に入力されてもよい。この場合、ユーザは、例えば型厚調整を行う際は、ユーザインターフェースを介して、警報オン指示を入力すればよい。
【0046】
或いは、所定の警報オフ条件は、吸着板22が移動中である場合に成立する条件であってよい。吸着板22が移動中であるか否かは、制御部60の制御信号(即ち、リニアモータ28に対する、移動指令に対応する駆動信号の印加の有無)に基づいて判断されてもよいし、吸着板22の位置を検出するリニアエンコーダの出力信号に基づいて判断されてもよい。尚、上述の各種条件は、OR条件として組み合わせて使用されてもよい。
【0047】
本ステップ400において、所定の警報オフ条件が満たされている場合には、そのまま終了する。この場合、後述のステップ406の処理が実行されず、従って、後述のセンサ92,94からの信号に基づく警報が出力されることはない。他方、所定の警報オフ条件が満たされていない場合は、ステップ402に進む。
【0048】
ステップ402では、第1検出信号が発生したか否か、即ちセンサ92から第1検出信号が入力されたか否かが判定される。第1検出信号が発生した場合には、ステップ406に進む。第1検出信号が発生しない場合には、ステップ404に進む。
【0049】
ステップ404では、第2検出信号が発生したか否か、即ちセンサ94から第2検出信号が入力されたか否かが判定される。第2検出信号が発生した場合には、ステップ406に進む。他方、第2検出信号が発生しない場合には、そのまま終了する。この場合、後述のステップ406の処理が実行されず、従って、後述のセンサ92,94からの信号に基づく警報が出力されることはない。
【0050】
ステップ406では、警報が出力される。警報は、型厚調整範囲を超えて型厚調整が行われていることをユーザに伝達するための警報であり、音や表示等の任意の形態で実行されてもよい。例えば、警報は、ブザーやメッセージにより出力されてもよい。尚、警報と共に、必要に応じて、型厚調整用モータの駆動が強制的に停止されてもよい。
【0051】
このようにして図4に示す処理によれば、所定の警報オフ条件が満たされた場合には、センサ92又は94から第1又は第2検出信号が出力された場合であっても、警報が出力されることがない。これにより、所定の警報オフ条件を適切に設定することで、不要な警報を適切に防止することができる。例えば、成形工程において型開きを行う際、センターロッド39は、図2に示すように、第2基準位置Y2よりも後方に来る場合がある。このような場合は、センサ94からの第2検出信号の発生に伴って、不要な警報が出力されることになる。また、例えば型厚調整範囲の下限値ぎりぎりの型厚に調整して、成形工程において型閉じを行う場合、制御上の精度に依存して、センターロッド39が、第1基準位置Y1よりも前方に来る場合がありうる。このような場合は、センサ92からの第1検出信号の発生に伴って、不要な警報が出力されることになる。これに対して、所定の警報オフ条件として、例えば型厚調整の実施中でない場合に成立する条件や吸着板22が移動中である場合に成立する条件が使用されると、かかる不要な警報を適切に防止することができる。
【0052】
尚、図4に示す処理では、センサ92,94からの第1及び第2検出信号に応答しないことで警報の出力をオフしているが、所定の警報オフ条件が成立した場合に、センサ92,94自体をオフすることで、警報の出力をオフしてもよい。即ち、センサ92,94の動作や電源をオフしてもよい。或いは、所定の警報オフ条件が成立した場合に、センサ92,94と制御部60との間の信号線をスイッチ等で遮断することで、警報の出力をオフしてもよい。
【0053】
尚、上述した実施例においては、特許請求の範囲における「第1の固定部材」は、固定プラテン11に対応し、特許請求の範囲における「第1の可動部材」は、可動プラテン12に対応する。また、特許請求の範囲における「第2の固定部材」は、リヤプラテン13に対応し、特許請求の範囲における「第2の可動部材」は、吸着板22に対応する。また、特許請求の範囲における「第1センサ」は、センサ92に対応し、特許請求の範囲における「第2センサ」は、センサ94に対応する。
【0054】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形及び置換を加えることができる。
【0055】
例えば、センサ92,94は、フレームFrの第1基準位置Y1及び第2基準位置Y2に対するセンターロッド39の位置を検出できる限り、任意の位置に設定されてもよい。例えば、センサ92,94は、フレームFrに対して固定されたリヤプラテン13に設けられてもよい。また、上述した実施例では、センターロッド39の後端の第1基準位置Y1及び第2基準位置Y2に対する通過の有無をセンサ92,94により検出しているが、センサ92,94は、センターロッド39の後端以外の所定部位の通過の有無を検出するものであってもよい。この場合、センターロッド39の後端以外の所定部位にマーカーのような特徴を持たせておけばよい。尚、この場合は、第1基準位置Y1及び第2基準位置Y2は、それぞれ、型厚調整範囲の下限値及び上限値が実現されたときのセンターロッド39の所定部位の各位置に対応する。この場合、センサ92,94は、センターロッド39の所定部位のマーカーを検出した時点で第1検出信号及び第2検出信号を出力する。即ち、センターロッド39の第1の所定部位が第1基準位置Y1に至ったときにセンサ92がセンターロッド39の第1の所定部位のマーカーを検出して第1検出信号を出力し、センターロッド39の第2の所定部位が第2基準位置Y2に至ったときにセンサ94がセンターロッド39の第2の所定部位のマーカーを検出して第2検出信号を出力する。
【0056】
また、上述では、特定の構成の型締装置10を例示しているが、型締装置10は、電磁石を利用して型締めを行う任意の構成であってよい。
【符号の説明】
【0057】
Fr フレーム
Gd ガイド
10 型締装置
11 固定プラテン
12 可動プラテン
13 リヤプラテン
14 タイバー
15 固定金型
16 可動金型
17 射出装置
18 射出ノズル
19 金型装置
22 吸着板
28 リニアモータ
29 固定子
31 可動子
33 磁極歯
34 コア
35 コイル
37 電磁石ユニット
39 センターロッド
41 穴
44 型厚調整機構
45 溝
46 コア
47 ヨーク
48 コイル
49 電磁石
51 吸着部
55 荷重検出器
60 制御部
61 型開閉処理部
62 型締処理部
63 型厚調整監視部
92,94 センサ
Y1 第1基準位置
Y2 第2基準位置
【技術分野】
【0001】
本発明は、型締め動作を駆動する電磁石を備える射出成形機に関する。
【背景技術】
【0002】
従来、射出成形機においては、樹脂を射出装置の射出ノズルから射出して固定金型と可動金型との間のキャビティ空間に充填(てん)し、固化させることによって成形品を得るようになっている。そして、固定金型に対して可動金型を移動させて型閉じ、型締め及び型開きを行うために型締装置が配設される。
【0003】
該型締装置には、油圧シリンダに油を供給することによって駆動される油圧式の型締装置、及び電動機によって駆動される電動式の型締装置があるが、該電動式の型締装置は、制御性が高く、周辺を汚すことがなく、かつ、エネルギー効率が高いので、多く利用されている。この場合、電動機を駆動することによってボールねじを回転させて推力を発生させ、該推力をトグル機構によって拡大し、大きな型締力を発生させるようにしている。
【0004】
ところが、構成の電動式の型締装置においては、トグル機構を使用するようになっているので、該トグル機構の特性上、型締力を変更することが困難であり、応答性及び安定性が悪く、成形中に型締力を制御することができない。そこで、ボールねじによって発生させられた推力を直接型締力として使用することができるようにした型締装置が提供されている。この場合、電動機のトルクと型締力とが比例するので、成形中に型締力を制御することができる。
【0005】
しかしながら、従来の型締装置においては、ボールねじの耐荷重性が低く、大きな型締力を発生させることができないだけでなく、電動機に発生するトルクリップルによって型締力が変動してしまう。また、型締力を発生させるために、電動機に電流を常時供給する必要があり、電動機の消費電力量及び発熱量が多くなるので、電動機の定格出力をその分大きくする必要があり、型締装置のコストが高くなってしまう。
【0006】
そこで、型開閉動作にはリニアモータを使用し、型締動作には電磁石の吸着力を利用した型締装置が考えられる(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】国際公開第05/090052号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、特許文献1に記載されるような電磁石の吸着力を利用した型締装置を使用する構成においては、例えばトグル式の構成と同様、金型装置の厚さの変化に対応できるように、型厚調整機構が設けられる。型厚調整の際、上限値又は下限値を越えて型厚調整が実行されないようにするために、フレーム等にセンサを設けて、フレームに対するセンターロッドの位置を監視することが有用である。
【0009】
しかしながら、かかるセンサは、型開閉動作時のセンターロッドの動きに伴って反応し、不必要な警報の原因となる虞がある。
【0010】
そこで、本発明は、センサを用いて型厚調整を適切に監視しつつ、不要な警報等を抑制することができる射出成形機の提供を目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するため、本発明の一局面によれば、フレームと、
固定金型が取り付けられる第1の固定部材と、
前記第1の固定部材と対向して配設され、センターロッドが貫通する第2の固定部材と、
可動金型が取り付けられる第1の可動部材と、
前記第1の可動部材と前記センターロッドで連結されて前記第1の可動部材と共に移動する第2の可動部材であって、前記第2の固定部材と協動して、電磁石による吸着力で型締力を発生させる型締力発生機構を構成する第2の可動部材と、
前記センターロッドを前記第2の可動部材に対して移動させることで、第1の可動部材と前記第2の可動部材との間の距離を調整する型厚調整機構と、
前記センターロッドと前記フレームとの位置関係を表す情報を取得するセンサと、
前記センサの検出結果に基づく所定警報出力条件が満たされた場合に、警報を出力する制御装置と、
を備え、
前記制御装置は、所定条件が満たされた場合に、前記警報を抑制するように構成されることを特徴とする、射出成形機が提供される。
【発明の効果】
【0012】
本発明によれば、センサを用いて型厚調整を適切に監視しつつ、不要な警報等を抑制することができる射出成形機が得られる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施の形態の射出成形機における型締装置の型閉じ時の状態を示す図である。
【図2】本発明の実施の形態の射出成形機における型締装置の型開き時の状態を示す図である。
【図3】型厚調整機構44の一例を示す断面図である。
【図4】型厚調整監視部63により実行される主要制御の一例を示すフローチャートである。
【発明を実施するための形態】
【0014】
以下、図面を参照して、本発明を実施するための最良の形態の説明を行う。尚、本実施の形態において、型締装置については、型閉じを行う際の可動プラテンの移動方向を前方とし、型開きを行う際の可動プラテンの移動方向を後方とし、射出装置については、射出を行う際のスクリューの移動方向を前方とし、計量を行う際のスクリューの移動方向を後方として説明する。
【0015】
図1は本発明の実施の形態の射出成形機における型締装置の型閉じ時の状態を示す図、図2は本発明の実施の形態の射出成形機における型締装置の型開き時の状態を示す図である。尚、図1及び図2において、ハッチングを付された部材は主要断面を示す。
【0016】
図において、10は型締装置、Frは射出成形機のフレーム(架台)、Gdは、該フレームFrに対して可動なガイド、11は、図示されないガイド上又はフレームFr上に載置された固定プラテンであり、該固定プラテン11と所定の間隔を置いて、かつ、固定プラテン11と対向させてリヤプラテン13が配設され、固定プラテン11とリヤプラテン13との間に4本のタイバー14(図においては、4本のタイバー14のうちの2本だけを示す。)が架設される。尚、リヤプラテン13は、フレームFrに対して固定される。
【0017】
タイバー14の前端部(図において右端部)にはネジ部(図示せず)が形成され、該ネジ部にナットn1を螺合して締め付けることによって、タイバー14の前端部が固定プラテン11に固定される。タイバー14の後端部はリヤプラテン13に固定される。
【0018】
そして、タイバー14に沿って固定プラテン11と対向させて可動プラテン12が型開閉方向に進退自在に配設される。そのために、可動プラテン12がガイドGdに固定され、可動プラテン12におけるタイバー14と対応する箇所にタイバー14を貫通させるための図示されないガイド穴又は切欠き部が形成される。尚、ガイドGdには、後述の吸着板22も固定される。ガイドGdは、図示のように、吸着板22と可動プラテン12のそれぞれに対して別々に設けられてもよいし、吸着板22と可動プラテン12に対して共通の一体物により構成されてもよい。
【0019】
また、固定プラテン11には固定金型15が、可動プラテン12には可動金型16がそれぞれ固定され、可動プラテン12の進退に伴って固定金型15と可動金型16とが接離させられ、型閉じ、型締め及び型開きが行われる。尚、型締めが行われるのに伴って、固定金型15と可動金型16との間に図示されないキャビティ空間が形成され、射出装置17の射出ノズル18から射出された図示されない樹脂がキャビティ空間に充墳される。また、固定金型15及び可動金型16によって金型装置19が構成される。
【0020】
吸着板22は、可動プラテン12と平行にガイドGdに固定される。これにより、吸着板22は、リヤプラテン13より後方において進退自在となる。吸着板22は、磁性材料で形成されてよい。例えば、吸着板22は、強磁性体から成る薄板を積層することによって形成される電磁積層鋼板により構成されてもよい。或いは、吸着板22は、鋳造により形成されてもよい。
【0021】
リニアモータ28は、可動プラテン12を進退させるため、ガイドGdに設けられる。リニアモータ28は、固定子29、及び可動子31を備え、固定子29は、フレームFr上において、ガイドGdと平行に、かつ、可動プラテン12の移動範囲に対応させて形成され、可動子31は、可動プラテン12の下端において、固定子29と対向させて、かつ、所定の範囲にわたって形成される。
【0022】
可動子31は、コア34及びコイル35を備える。そして、コア34は、固定子29に向けて突出させて、所定のピッチで形成された複数の磁極歯33を備え、コイル35は、各磁極歯33に巻装される。尚、磁極歯33は可動プラテン12の移動方向に対して直角の方向に、互いに平行に形成される。また、固定子29は、図示されないコア、及び該コア上に延在させて形成された図示されない永久磁石を備える。該永久磁石は、N極及びS極の各磁極を交互に着磁させることによって形成される。コイル35に所定の電流を供給することによってリニアモータ28を駆動すると、可動子31が進退させられ、それに伴って、ガイドGdにより可動プラテン12が進退させられ、型閉じ及び型開きを行うことができる。
【0023】
尚、本実施の形態においては、固定子29に永久磁石を、可動子31にコイル35を配設するようになっているが、固定子にコイルを、可動子に永久磁石を配設することもできる。その場合、リニアモータ28が駆動されるのに伴って、コイルが移動しないので、コイルに電力を供給するための配線を容易に行うことができる。
【0024】
尚、ガイドGdに可動プラテン12と吸着板22を固定する構成に限られず、可動プラテン12又は吸着板22にリニアモータ28の可動子31を設ける構成としてもよい。また、型開閉機構としては、リニアモータ28に限定されず、油圧式や電動式等であってもよい。
【0025】
可動プラテン12が前進させられて可動金型16が固定金型15に当接すると、型閉じが行われ、続いて、型締めが行われる。リヤプラテン13と吸着板22との間に、型締めを行うための電磁石ユニット37が配設される。また、リヤプラテン13及び吸着板22を貫通して延び、かつ、可動プラテン12と吸着板22とを連結するセンターロッド39が進退自在に配設される。該センターロッド39は、型閉じ時及び型開き時に、可動プラテン12の進退に連動させて吸着板22を進退させ、型締め時に、電磁石ユニット37によって発生させられた吸着力を可動プラテン12に伝達する。
【0026】
尚、固定プラテン11、可動プラテン12、リヤプラテン13、吸着板22、リニアモータ28、電磁石ユニット37、センターロッド39等によって型締装置10が構成される。
【0027】
電磁石ユニット37は、リヤプラテン13側に形成された電磁石49、及び吸着板22側に形成された吸着部51からなる。また、リヤプラテン13の後端面の所定の部分、本実施の形態においては、センターロッド39まわりに溝45が形成され、溝45よりも内側にコア46、及び溝45よりも外側にヨーク47が形成される。そして、溝45内でコア46まわりにコイル48が巻装される。尚、コア46及びヨーク47は、鋳物の一体構造で構成されるが、強磁性体から成る薄板を積層することによって形成され、電磁積層鋼板を構成してもよい。
【0028】
尚、本実施の形態において、リヤプラテン13とは別に電磁石49が、吸着板22とは別に吸着部51が形成されもよいし、リヤプラテン13の一部として電磁石を、吸着板22の一部として吸着部を形成してもよい。また、電磁石と吸着部の配置は、逆であってもよい。例えば、吸着板22側に電磁石49を設け、リヤプラテン13側に吸着部を設けてもよい。
【0029】
電磁石ユニット37において、コイル48に電流を供給すると、電磁石49が駆動され、吸着部51を吸着し、型締力を発生させることができる。
【0030】
センターロッド39は、後端部において吸着板22と連結させて、前端部において可動プラテン12と連結させて配設される。したがって、センターロッド39は、型閉じ時に可動プラテン12と共に前進させられて吸着板22を前進させ、型開き時に可動プラテン12と共に後退させられて吸着板22を後退させる。そのために、リヤプラテン13の中央部分に、センターロッド39を貫通させるための穴41が形成される。
【0031】
型締装置10のリニアモータ28及び電磁石49の駆動は、制御部60によって制御される。制御部60は、CPU及びメモリ等を備え、CPUによって演算された結果に応じて、リニアモータ28のコイル35や電磁石49のコイル48に電流を供給するための回路も備える。制御部60には、また、荷重検出器55が接続される。荷重検出器55は、型締装置10において、少なくとも1本のタイバー14の所定の位置(固定プラテン11とリヤプラテン13との間における所定の位置)に設置され、当該タイバー14にかかる荷重を検出する。図中では、上下二本のタイバー14に荷重検出器55が設置された例が示されている。荷重検出器55は、例えば、タイバー14の伸び量を検出するセンサによって構成される。荷重検出器55によって検出された荷重(歪)は、制御部60に送られる。制御部60は、荷重検出器55の出力に基づいて、型締力を検出する。尚、制御部60は、図2においては便宜上省略されている。
【0032】
次に、型締装置10の動作について説明する。
【0033】
制御部60の型開閉処理部61によって型閉じ工程が制御される。図2の状態(型開き時の状態)において、型開閉処理部61は、コイル35に電流を供給する。続いて、リニアモータ28が駆動され、可動プラテン12が前進させられ、図1に示されるように、可動金型16が固定金型15に当接させられる。このとき、リヤプラテン13と吸着板22との間、すなわち、電磁石49と吸着部51との間には、ギャップδが形成される。尚、型閉じに必要とされる力は、型締力と比較されて十分に小さくされる。
【0034】
続いて、制御部60の型締処理部62は、型締工程を制御する。型締処理部62は、コイル48に電流を供給し、吸着部51を電磁石49の吸着力によって吸着する。それに伴って、吸着板22及びセンターロッド39を介して型締力が可動プラテン12に伝達され、型締めが行われる。型締め開始時等、型締力を変化させる際に、型締処理部62は、当該変化によって得るべき目標となる型締力、すなわち、定常状態で目標とする型締力を発生させるために必要な定常的な電流の値をコイル48に供給するように制御している。
【0035】
尚、型締力は荷重検出器55によって検出される。検出された型締力は制御部60に送られ、制御部60において、型締力が設定値になるようにコイル48に供給される電流が調整され、フィードバック制御が行われる。この間、射出装置17において溶融させられた樹脂が射出ノズル18から射出され、金型装置19のキャビティ空間に充墳される。
【0036】
キャビティ空間内の樹脂が冷却されて固化すると、型開閉処理部61は、型開き工程を制御する。型締処理部62は、図1の状態において、コイル48への電流の供給を停止する。それに伴って、リニアモータ28が駆動され、可動プラテン12が後退させられ、図2に示されるように、可動金型16が後退限位置に置かれ、型開きが行われる。
【0037】
次に、型厚調整に関連した構成について説明する。
【0038】
吸着板22の後方側には、型厚調整機構44が設けられる。型厚調整機構44は、金型装置19の厚さに対応させて、可動プラテン12と吸着板22との相対的な位置(即ちこれらの間の距離)を調整する機構である。型厚調整機構44の構成自体は任意であってよい。例えば、型厚調整機構44は、図示しない型厚調整用モータにより吸着板22に対するセンターロッド39の位置を可変する。これにより、吸着板22に対するセンターロッド39の位置が調整され、固定プラテン11に対する可動プラテン12の位置が調整される。すなわち、可動プラテン12と吸着板22との相対的な位置を変えることによって、型厚の調整が行われる。
【0039】
図3は、型厚調整機構44の一例を示す断面図である。図3に示す例では、吸着板22の背後は、型厚調整機構44のナット押さえ部材44bが締結される。ナット押さえ部材44bは、センターロッド39の周面に形成されたねじ(図示せず)に噛み合うナット44aを保持する。型厚調整は、吸着板22が位置保持された状態で実行されてよい。吸着板22の位置保持は、リニアモータ28の制御により実現されてもよいし、機械的にロックされることで実現されてもよい。型厚調整機構44は、図示しない型厚調整用モータにより、ナット44aに結合されたギア44cを回転させることで、吸着板22に対するセンターロッド39の位置を可変する。これにより、吸着板22に対するセンターロッド39の位置が調整され、固定プラテン11に対する可動プラテン12の位置が調整され、型厚の調整が行われる。尚、前提として、成形工程中は、型厚調整用モータを作動されず、吸着板22に対するセンターロッド39の位置は基本的に変化しない(即ち、調整された状態が維持される)。
【0040】
図1及び図2を再度参照するに、フレームFrには、センターロッド39の位置を検出するセンサ92,94が設けられる。センサ92は、センターロッド39の後端がフレームFrの第1基準位置Y1よりも前方(固定プラテン11に近づく側)に来た場合に、その旨の検出信号(以下、第1検出信号という)を発生する。センサ94は、センターロッド39の後端がフレームFrの第2基準位置Y2よりも後方に来た場合に、その旨の検出信号(以下、第2検出信号という)を発生する。第1基準位置Y1及び第2基準位置Y2は、型厚調整機構44による型厚調整範囲の限界値に対応する。即ち、第1基準位置Y1及び第2基準位置Y2は、それぞれ、型厚調整範囲の下限値及び上限値が実現されたときのセンターロッド39の後端の各位置に対応する。型厚調整範囲の限界値に対応する第1基準位置Y1及び第2基準位置Y2は、型厚調整を行う際の吸着板22の位置(例えばリヤプラテン13と吸着板22との間の距離)に応じて変化するので、型厚調整を行う際の吸着板22の位置に基づいて決定されてよい。従って、センサ92,94の各位置は、型厚調整を行う際の吸着板22の位置に基づいて決定されてよい。
【0041】
センサ92,94は、磁気式や光学式、機械式のような任意の方式で、センターロッド39の位置を検出するものであってよい。例えば、センサ92,94は、光学式であり、第1基準位置Y1及び第2基準位置Y2のそれぞれにおける鉛直面内で、センターロッド39に向けて光を発し、その反射光又は通過光の受信の有無に基づいて、センターロッド39の位置を検出するものであってよい。例えば、センターロッド39が第1基準位置Y1よりも後方に位置するときは、センサ92は反射光を受信し(又は透過光を受信せず)、センターロッド39が第1基準位置Y1よりも前方に位置するときは、センサ92は反射光を受信しない(又は透過光を受信する)。この場合、センサ92は、反射光を受信しない(又は透過光を受信する)間、第1検出信号を出力する。同様に、センターロッド39が第2基準位置Y2よりも後方に位置するときは、センサ94は反射光を受信し(又は透過光を受信せず)、センターロッド39が第2基準位置Y2よりも前方に位置するときは、センサ94は反射光を受信しない(又は透過光を受信する)。この場合、センサ94は、反射光を受信する(又は透過光を受信しない)間、第2検出信号を出力する。
【0042】
尚、型厚調整は、リヤプラテン13と吸着板22との間にギャップδが維持された状態(図1参照)で実行されてもよい。図1に示す状態では、センターロッド39の後端が第1基準位置Y1と第2基準位置Y2の間に位置するので、型厚調整範囲内で型厚調整が実現されていることになる。
【0043】
次に、制御部60の型厚調整監視部63による動作について説明する。
【0044】
図4は、型厚調整監視部63により実行される主要制御の一例を示すフローチャートである。図4に示す処理ルーチンは、射出成形機の稼働中(電源オン中)に所定周期毎に繰り返し実行されてもよい。制御部60の型厚調整監視部63には、センサ92,94の出力信号が入力される。
【0045】
ステップ400では、所定の警報オフ条件が満たされているか否かが判定される。所定の警報オフ条件は、後述のセンサ92,94からの信号に基づく警報(ステップ406参照)をオフする条件である。所定の警報オフ条件は、後述のセンサ92,94からの信号に基づく警報が型厚調整時に行うべき警報である点を考慮して、それ以外の作業時又は動作時に警報が出力されないように設定されてよい。例えば、所定の警報オフ条件は、型厚調整が実施されていない場合に成立する条件であってよい。この場合、型厚調整が実施されているか否かは、型厚調整の際の制御信号の有無(例えば、型厚調整用モータへの駆動信号の有無)に基づいて判断されてもよい。或いは、所定の警報オフ条件は、ユーザからの警報オフ指示が入力された場合に成立する条件であってよい。ユーザからの警報オフ指示は、任意のユーザインターフェース(例えば、オン/オフボタン)を介して制御部60に入力されてもよい。この場合、ユーザは、例えば型厚調整を行う際は、ユーザインターフェースを介して、警報オン指示を入力すればよい。
【0046】
或いは、所定の警報オフ条件は、吸着板22が移動中である場合に成立する条件であってよい。吸着板22が移動中であるか否かは、制御部60の制御信号(即ち、リニアモータ28に対する、移動指令に対応する駆動信号の印加の有無)に基づいて判断されてもよいし、吸着板22の位置を検出するリニアエンコーダの出力信号に基づいて判断されてもよい。尚、上述の各種条件は、OR条件として組み合わせて使用されてもよい。
【0047】
本ステップ400において、所定の警報オフ条件が満たされている場合には、そのまま終了する。この場合、後述のステップ406の処理が実行されず、従って、後述のセンサ92,94からの信号に基づく警報が出力されることはない。他方、所定の警報オフ条件が満たされていない場合は、ステップ402に進む。
【0048】
ステップ402では、第1検出信号が発生したか否か、即ちセンサ92から第1検出信号が入力されたか否かが判定される。第1検出信号が発生した場合には、ステップ406に進む。第1検出信号が発生しない場合には、ステップ404に進む。
【0049】
ステップ404では、第2検出信号が発生したか否か、即ちセンサ94から第2検出信号が入力されたか否かが判定される。第2検出信号が発生した場合には、ステップ406に進む。他方、第2検出信号が発生しない場合には、そのまま終了する。この場合、後述のステップ406の処理が実行されず、従って、後述のセンサ92,94からの信号に基づく警報が出力されることはない。
【0050】
ステップ406では、警報が出力される。警報は、型厚調整範囲を超えて型厚調整が行われていることをユーザに伝達するための警報であり、音や表示等の任意の形態で実行されてもよい。例えば、警報は、ブザーやメッセージにより出力されてもよい。尚、警報と共に、必要に応じて、型厚調整用モータの駆動が強制的に停止されてもよい。
【0051】
このようにして図4に示す処理によれば、所定の警報オフ条件が満たされた場合には、センサ92又は94から第1又は第2検出信号が出力された場合であっても、警報が出力されることがない。これにより、所定の警報オフ条件を適切に設定することで、不要な警報を適切に防止することができる。例えば、成形工程において型開きを行う際、センターロッド39は、図2に示すように、第2基準位置Y2よりも後方に来る場合がある。このような場合は、センサ94からの第2検出信号の発生に伴って、不要な警報が出力されることになる。また、例えば型厚調整範囲の下限値ぎりぎりの型厚に調整して、成形工程において型閉じを行う場合、制御上の精度に依存して、センターロッド39が、第1基準位置Y1よりも前方に来る場合がありうる。このような場合は、センサ92からの第1検出信号の発生に伴って、不要な警報が出力されることになる。これに対して、所定の警報オフ条件として、例えば型厚調整の実施中でない場合に成立する条件や吸着板22が移動中である場合に成立する条件が使用されると、かかる不要な警報を適切に防止することができる。
【0052】
尚、図4に示す処理では、センサ92,94からの第1及び第2検出信号に応答しないことで警報の出力をオフしているが、所定の警報オフ条件が成立した場合に、センサ92,94自体をオフすることで、警報の出力をオフしてもよい。即ち、センサ92,94の動作や電源をオフしてもよい。或いは、所定の警報オフ条件が成立した場合に、センサ92,94と制御部60との間の信号線をスイッチ等で遮断することで、警報の出力をオフしてもよい。
【0053】
尚、上述した実施例においては、特許請求の範囲における「第1の固定部材」は、固定プラテン11に対応し、特許請求の範囲における「第1の可動部材」は、可動プラテン12に対応する。また、特許請求の範囲における「第2の固定部材」は、リヤプラテン13に対応し、特許請求の範囲における「第2の可動部材」は、吸着板22に対応する。また、特許請求の範囲における「第1センサ」は、センサ92に対応し、特許請求の範囲における「第2センサ」は、センサ94に対応する。
【0054】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形及び置換を加えることができる。
【0055】
例えば、センサ92,94は、フレームFrの第1基準位置Y1及び第2基準位置Y2に対するセンターロッド39の位置を検出できる限り、任意の位置に設定されてもよい。例えば、センサ92,94は、フレームFrに対して固定されたリヤプラテン13に設けられてもよい。また、上述した実施例では、センターロッド39の後端の第1基準位置Y1及び第2基準位置Y2に対する通過の有無をセンサ92,94により検出しているが、センサ92,94は、センターロッド39の後端以外の所定部位の通過の有無を検出するものであってもよい。この場合、センターロッド39の後端以外の所定部位にマーカーのような特徴を持たせておけばよい。尚、この場合は、第1基準位置Y1及び第2基準位置Y2は、それぞれ、型厚調整範囲の下限値及び上限値が実現されたときのセンターロッド39の所定部位の各位置に対応する。この場合、センサ92,94は、センターロッド39の所定部位のマーカーを検出した時点で第1検出信号及び第2検出信号を出力する。即ち、センターロッド39の第1の所定部位が第1基準位置Y1に至ったときにセンサ92がセンターロッド39の第1の所定部位のマーカーを検出して第1検出信号を出力し、センターロッド39の第2の所定部位が第2基準位置Y2に至ったときにセンサ94がセンターロッド39の第2の所定部位のマーカーを検出して第2検出信号を出力する。
【0056】
また、上述では、特定の構成の型締装置10を例示しているが、型締装置10は、電磁石を利用して型締めを行う任意の構成であってよい。
【符号の説明】
【0057】
Fr フレーム
Gd ガイド
10 型締装置
11 固定プラテン
12 可動プラテン
13 リヤプラテン
14 タイバー
15 固定金型
16 可動金型
17 射出装置
18 射出ノズル
19 金型装置
22 吸着板
28 リニアモータ
29 固定子
31 可動子
33 磁極歯
34 コア
35 コイル
37 電磁石ユニット
39 センターロッド
41 穴
44 型厚調整機構
45 溝
46 コア
47 ヨーク
48 コイル
49 電磁石
51 吸着部
55 荷重検出器
60 制御部
61 型開閉処理部
62 型締処理部
63 型厚調整監視部
92,94 センサ
Y1 第1基準位置
Y2 第2基準位置
【特許請求の範囲】
【請求項1】
フレームと、
固定金型が取り付けられる第1の固定部材と、
前記第1の固定部材と対向して配設され、センターロッドが貫通する第2の固定部材と、
可動金型が取り付けられる第1の可動部材と、
前記第1の可動部材と前記センターロッドで連結されて前記第1の可動部材と共に移動する第2の可動部材であって、前記第2の固定部材と協動して、電磁石による吸着力で型締力を発生させる型締力発生機構を構成する第2の可動部材と、
前記センターロッドを前記第2の可動部材に対して移動させることで、第1の可動部材と前記第2の可動部材との間の距離を調整する型厚調整機構と、
前記センターロッドと前記フレームとの位置関係を表す情報を取得するセンサと、
前記センサの検出結果に基づく所定警報出力条件が満たされた場合に、警報を出力する制御装置と、
を備え、
前記制御装置は、所定条件が満たされた場合に、前記警報を抑制するように構成されることを特徴とする、射出成形機。
【請求項2】
前記センサは、型閉方向に移動する前記センターロッドが前記フレームの第1基準位置に至った又は前記第1基準位置を超えたときに、その旨の第1検出信号を発生する第1センサ、及び、型開方向に移動する前記センターロッドが前記フレームの第2基準位置に至った又は前記第1基準位置を超えたときに、その旨の第2検出信号を発生する第2センサの少なくともいずれか一方を含み、
前記所定警報出力条件は、前記第1検出信号又は第2検出信号の発生時に満たされる、請求項1に記載の射出成形機。
【請求項3】
前記センサは、型閉方向で前記センターロッドが前記フレームの第1基準位置よりも前記第1の固定部材に近づく側に来た場合に、その旨の第1検出信号を発生する第1センサ、及び、型開方向で前記センターロッドが前記フレームの第2基準位置よりも前記第1の固定部材から離れる側に来た場合に、その旨の第2検出信号を発生する第2センサの少なくともいずれか一方を含み、
前記所定警報出力条件は、前記第1検出信号又は第2検出信号の発生時に満たされる、請求項1に記載の射出成形機。
【請求項4】
前記制御装置は、前記第2の可動部材が移動中である場合に、前記警報を抑制する、請求項1〜3のうちのいずれか1項に記載の射出成形機。
【請求項5】
前記制御装置は、前記型厚調整機構が動作していない場合に、前記警報を抑制する、請求項1〜3のうちのいずれか1項に記載の射出成形機。
【請求項1】
フレームと、
固定金型が取り付けられる第1の固定部材と、
前記第1の固定部材と対向して配設され、センターロッドが貫通する第2の固定部材と、
可動金型が取り付けられる第1の可動部材と、
前記第1の可動部材と前記センターロッドで連結されて前記第1の可動部材と共に移動する第2の可動部材であって、前記第2の固定部材と協動して、電磁石による吸着力で型締力を発生させる型締力発生機構を構成する第2の可動部材と、
前記センターロッドを前記第2の可動部材に対して移動させることで、第1の可動部材と前記第2の可動部材との間の距離を調整する型厚調整機構と、
前記センターロッドと前記フレームとの位置関係を表す情報を取得するセンサと、
前記センサの検出結果に基づく所定警報出力条件が満たされた場合に、警報を出力する制御装置と、
を備え、
前記制御装置は、所定条件が満たされた場合に、前記警報を抑制するように構成されることを特徴とする、射出成形機。
【請求項2】
前記センサは、型閉方向に移動する前記センターロッドが前記フレームの第1基準位置に至った又は前記第1基準位置を超えたときに、その旨の第1検出信号を発生する第1センサ、及び、型開方向に移動する前記センターロッドが前記フレームの第2基準位置に至った又は前記第1基準位置を超えたときに、その旨の第2検出信号を発生する第2センサの少なくともいずれか一方を含み、
前記所定警報出力条件は、前記第1検出信号又は第2検出信号の発生時に満たされる、請求項1に記載の射出成形機。
【請求項3】
前記センサは、型閉方向で前記センターロッドが前記フレームの第1基準位置よりも前記第1の固定部材に近づく側に来た場合に、その旨の第1検出信号を発生する第1センサ、及び、型開方向で前記センターロッドが前記フレームの第2基準位置よりも前記第1の固定部材から離れる側に来た場合に、その旨の第2検出信号を発生する第2センサの少なくともいずれか一方を含み、
前記所定警報出力条件は、前記第1検出信号又は第2検出信号の発生時に満たされる、請求項1に記載の射出成形機。
【請求項4】
前記制御装置は、前記第2の可動部材が移動中である場合に、前記警報を抑制する、請求項1〜3のうちのいずれか1項に記載の射出成形機。
【請求項5】
前記制御装置は、前記型厚調整機構が動作していない場合に、前記警報を抑制する、請求項1〜3のうちのいずれか1項に記載の射出成形機。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−78935(P2013−78935A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2012−168488(P2012−168488)
【出願日】平成24年7月30日(2012.7.30)
【出願人】(000002107)住友重機械工業株式会社 (2,241)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成24年7月30日(2012.7.30)
【出願人】(000002107)住友重機械工業株式会社 (2,241)
【Fターム(参考)】
[ Back to top ]