
射撃訓練装置
【課題】使用環境に関わらず照準点が確認可能であると共に、煩雑な調整作業が必要無い射撃訓練装置を提供する。
【解決手段】銃に取り付けられ、撮像画像40内の所定ポイント(撮像中心40C)が前記銃の照準方向と一致させられるカメラと、前記カメラの撮像画像40の中から射撃目標40Tを画像認識する画像認識手段と、前記射撃目標40Tを示す特徴点50Tと前記銃の照準点50Aとを含む照準点画像50を生成する画像生成手段とを備え、前記画像生成手段は、前記特徴点50Tを前記照準点画像50内の所定位置(中心位置)に表示すると共に、前記所定位置を基準としたときの、前記撮像画像40における前記射撃目標40Tに対する前記所定ポイント40Cの位置に、前記照準点50Aを表示する。
【解決手段】銃に取り付けられ、撮像画像40内の所定ポイント(撮像中心40C)が前記銃の照準方向と一致させられるカメラと、前記カメラの撮像画像40の中から射撃目標40Tを画像認識する画像認識手段と、前記射撃目標40Tを示す特徴点50Tと前記銃の照準点50Aとを含む照準点画像50を生成する画像生成手段とを備え、前記画像生成手段は、前記特徴点50Tを前記照準点画像50内の所定位置(中心位置)に表示すると共に、前記所定位置を基準としたときの、前記撮像画像40における前記射撃目標40Tに対する前記所定ポイント40Cの位置に、前記照準点50Aを表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、銃の照準点を確認することのできる射撃訓練装置に関する。
【背景技術】
【0002】
標的を使用して射撃訓練を行う射撃訓練装置が知られている。例えば特許文献1に記載される技術にあっては、銃から実弾を発射し、標的に弾丸が弾着した際に発生する衝撃を標的側で検出して弾着数を計数し、その計数結果を射撃側に無線伝送して表示又はプリントアウトするように構成している。
上記した特許文献1に記載される射撃訓練装置では、射撃手は一連の射撃訓練終了後に弾着点を確認することはできるが、照準点は確認することができない。
照準点を確認する技術としては、以下の方式が知られている。
(1)銃にレーザ送信機と受信機を取り付けると共に、標的にレーザ光の反射板を設置する。レーザ送信機から送信して反射板で反射したレーザ光を受信機で受信し、PSD法で解析する。
(2)銃にレーザ送信機を取り付け、スクリーン等へレーザ光の送信を行い、カメラでスクリーン上のレーザの照射点を撮影する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−142092号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記した(1)(2)の方式には、以下のような問題点があった。
・反射距離の調整が煩雑である。
・標的側にカメラが必要であり、設置が固定式になると共に、調整に時間を要する。
・屋外などの明るい環境ではレーザの照射点が見えない。
・太陽光などのレーザ光以外の強い光を受ける環境では、受光側が正確に弾着位置を判定できない。
【0005】
本願発明は、上述の背景からなされたものであって、使用環境に関わらず照準点が確認可能であると共に、煩雑な調整作業が必要無い射撃訓練装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本願発明に係る射撃訓練装置にあっては、銃に取り付けられ、撮像画像内の所定ポイントが前記銃の照準方向と一致させられるカメラと、前記カメラの撮像画像の中から射撃目標を画像認識する画像認識手段と、前記射撃目標を示す特徴点と前記銃の照準点とを含む照準点画像を生成する画像生成手段とを備え、前記画像生成手段は、前記特徴点を前記照準点画像内の所定位置に表示すると共に、前記所定位置を基準としたときの、前記撮像画像における前記射撃目標に対する前記所定ポイントの位置に、前記照準点を表示するように構成した。
【0007】
また、本願発明に係る射撃訓練装置にあっては、銃に取り付けられ、撮像画像内の所定ポイントが前記銃の照準方向と一致させられるカメラと、前記カメラの撮像画像に、前記所定ポイントを原点とするXY座標を付与する座標付与手段と、前記カメラの撮像画像の中から射撃目標を画像認識する画像認識手段と、前記画像認識した射撃目標の座標を算出する座標算出手段と、前記算出した座標を、前記原点を中心に反転させた反転座標を算出する反転座標算出手段と、前記射撃目標を示す特徴点と前記銃の照準点とを含む照準点画像を生成する画像生成手段とを備え、前記画像生成手段は、前記照準点画像にXY座標を付与し、当該XY座標の原点に前記特徴点を表示すると共に、当該XY座標上の前記反転座標位置に前記照準点を表示するように構成した。
【発明の効果】
【0008】
本願に係る射撃訓練装置にあっては、使用環境に関わらず照準点が確認可能であると共に、煩雑な調整作業が必要無い。
【図面の簡単な説明】
【0009】
【図1】本願発明に係る射撃訓練装置の構成を示す図である。
【図2】図1に示した表示画像生成部で実行される処理を示すフローチャートである。
【図3】図1に示した表示画像生成部における照準点の算出手法を説明する図である。
【図4】図1に示した表示画像生成部で生成される表示画像の基本構成を示す図である。
【図5】図1に示した表示画像生成部で生成される表示画像の例を示す図である。される表示画面の一例である。
【図6】本願発明の第2の実施の形態に係る表示画像生成部の処理を示すフローチャートである。
【図7】本願発明の第2の実施の形態に係る照準点の算出手法を説明する図である。
【発明を実施するための形態】
【0010】
以下、本願発明の実施形態を説明する。
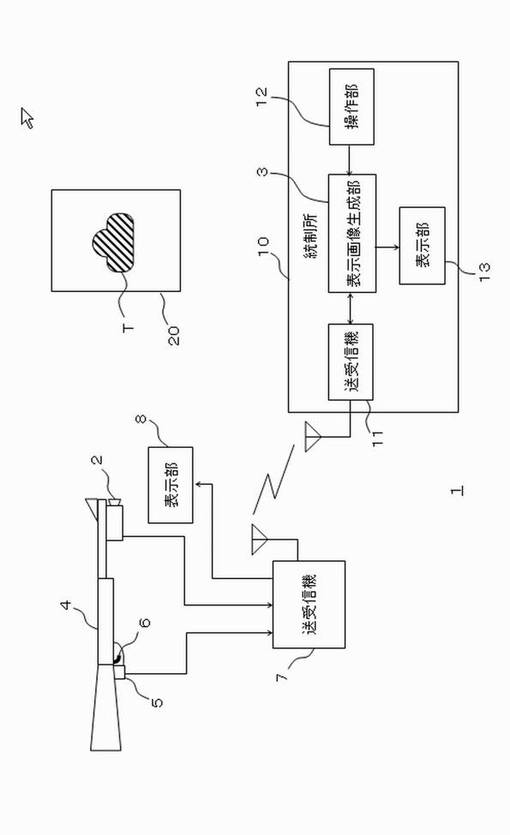
図1は、本願発明に係る射撃訓練装置の構成を示す図である。
図1に示すように、本願発明に係る射撃訓練装置1は、カメラ2と表示画像生成部3とを備える。
【0011】
カメラ2は、銃4に取り付けられる。カメラ2は、その撮像中心(所定ポイント)が銃4の照準方向と一致するように、銃4に取り付けられる。ここで「撮像中心」とは、カメラ2の撮像画像の中心を意味する。
また、銃4にはトリガセンサ5が取り付けられる。トリガセンサ5は、銃4のトリガ6の操作を検出する検出部であり、トリガ6の操作を検出すると所定の信号(以下「トリガ検出信号」という)を出力する。
尚、銃4は、トリガ6が操作されると、弾丸を模擬したレーザ光を発射する。
【0012】
カメラ2とトリガセンサ5は、送受信機7に接続される。送受信機7には、表示部(ディスプレイ)8が接続される。表示部8は、射手がその表示内容を確認できるよう、銃4の近傍に配置される。
【0013】
表示画像生成部3は、後述する画像生成処理を行う処理部であり、その機能は統制所10に配置されたコンピュータ等のハードウェア資源を利用して実現される。統制所10にはさらに、表示画像生成部3に接続される送受信機11と、キーボードやマウス等の操作部12と、表示部(ディスプレイ)13とが設けられる。
【0014】
図1において符号20は標的である。標的20には、射撃目標Tが描かれる。図示の例では、標的20に射撃目標Tを描いているが、射撃目標T自体を立体形状の標的としてもよい。
【0015】
次いで、射撃訓練装置1の動作の概要について説明する。
カメラ2で撮像された画像(具体的にはそのデータ)とトリガセンサ5のトリガ検出信号は、送受信機7に入力される。
カメラ2の撮像中心は、上記したように銃4の照準方向と一致させられるため、射手によって銃4が射撃目標Tに向けられた状態では、当該射撃目標Tが撮像画像内に含まれることになる。
送受信機7は、入力した撮像画像とトリガ検出信号に時間情報を付すと共に、圧縮処理や変調処理などを施し、無線送信を行う。尚、カメラ2に時間情報を持たせ、カメラ2で撮像画像に時間情報を重畳させるようにしてもよい。
【0016】
尚、図示は省略するが、銃4と標的20は複数設けられる。それぞれの銃4には、カメラ2とトリガセンサ5が取り付けられると共に、送受信機7が接続される。各送受信機7は、それぞれ異なる無線チャネルで送受信を行う。
【0017】
送受信機7から無線送信された撮像画像とトリガ検出信号は、統制所10の送受信機11で受信され、復調処理や伸張処理などが施された後、表示画像生成部3に入力される。表示画像生成部3は、入力した撮像画像とトリガ検出信号、及び、操作部12からの表示項目選択指示(後述)に基づき、銃4の照準点や弾着点を表示した表示画像を生成する。尚、表示画像生成部3は図示しない記憶部(レコーダー)を備え、当該記憶部に入力した撮像画像やトリガ検出信号を保存することで、操作部12からの入力に応じた任意のタイミングで任意の画像を生成することができる。
【0018】
表示画面生成部3で生成された表示画像のデータは表示部13に出力され、当該表示部13に表示される。また、表示画像のデータは送受信機11にも入力され、そこで圧縮処理や変調処理などが施された後、射手側の送受信機7に無線送信される。送受信機7で受信された表示画像のデータは、復調処理や伸張処理などが施された後、表示部8に出力され、当該表示部8に表示される。
【0019】
尚、射手側にも表示画像生成部3や操作部12と同様な機能を設け、射手側において任意のタイミングで、任意の画像を生成できるようにしてもよい。
また、射手側と統制所10の間を送受信機7と送受信機11で無線接続したが、カメラ2、トリガセンサ5、及び表示部8のそれぞれを、統制所10に有線で接続するようにしてもよい。
【0020】
次いで、表示画像生成部3の処理について詳説する。
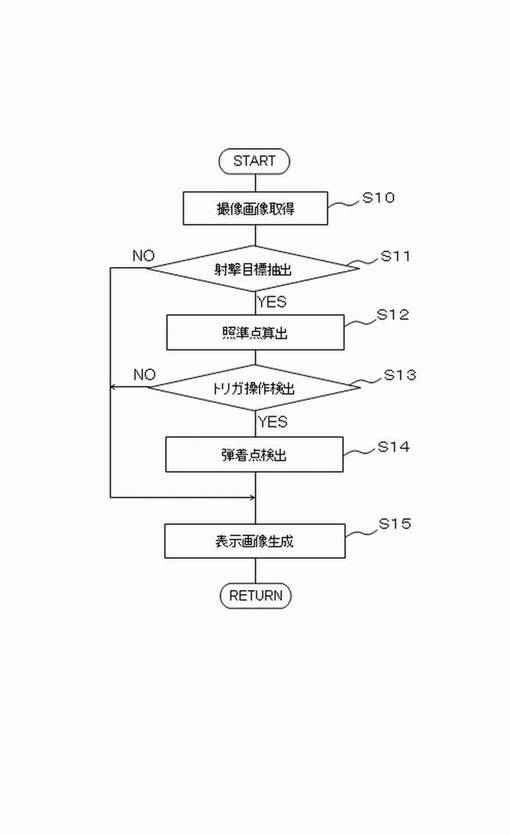
図2は、表示画像生成部3で実行される処理を示すフローチャートである。
表示画像生成部3は、先ず撮像画像のデータを取得(入力)する(S10)。そして、取得した撮像画像の中から射撃目標Tを画像認識により抽出する(S11)。射撃目標Tを抽出した場合は、撮像画像内における当該射撃目標Tの位置と撮像中心に基づいて、照準点を算出する(S12)。
【0021】
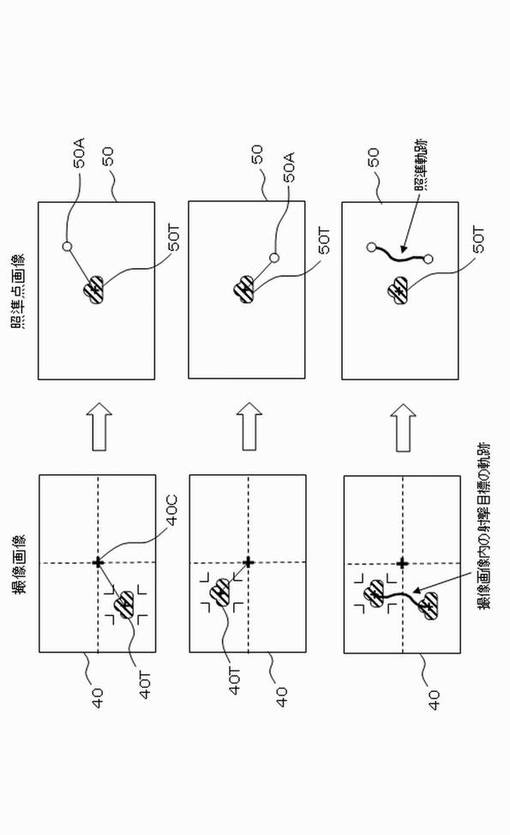
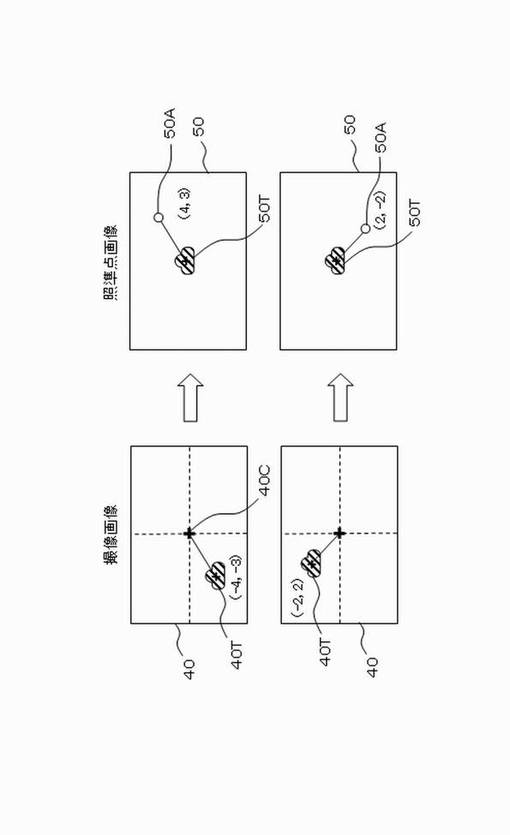
図3は、照準点の算出を説明する図である。
図3において、カメラ2の撮像画像を符号40で示し、表示画像生成部3で生成した照準点画像を符号50で示す。
撮像画像40において、符号40Cは撮像中心を示す。また、符号40Tは、撮像画像40内の射撃目標Tを示す。
上述したように、カメラ2は、その撮像中心40Cが銃4の照準方向と一致するように銃4に取り付けられる。即ち、撮像中心40Cは、銃4の照準点を示すこととなる。
【0022】
照準点画像50において、符号50Tは射撃目標Tを示す特徴点である。特徴点50Tは、本実施例にあっては、射撃目標Tと同じ形状を呈する画像として表示される。
特徴点50Tは、照準点画像50内の所定位置(固定位置)に表示される。本実施例では、照準点画像50の中心に特徴点50Tを表示するものとする。
【0023】
撮像画像40において、撮像中心40Cは銃4の照準点を示すことになる。そこで、照準点画像50において、特徴点50Tを所定位置に表示すると共に、当該所定位置を基準としたときの、撮像画像40における射撃目標40Tに対する撮像中心40Cの位置に、照準点50Aを表示する。
換言すれば、照準点画像50における特徴点50Tに対する照準点50Aの相対位置が、撮像画像40における射撃目標40Tに対する画像中心40Cの相対位置と一致するように、照準点50Tの位置を決定して表示する。
また、撮像画像40内における射撃目標40Tの位置が移動した場合、射撃目標40Tを基準とした撮像中心40Cの軌跡を求めれば、照準点画像50において照準点50Aの軌跡も表示することができる。
【0024】
尚、カメラ2の撮像画像40のスケールと照準点画像50のスケールは、必ずしも一致させる必要はなく、射撃目標Tまでの距離に応じて、照準点画像50における特徴点50Tの大きさや照準点50Aの位置(特徴点50Tからの距離)は適宜調整される。具体的には、射撃目標Tまでの距離が小さいときは、特徴点50Tを大きく表示し、距離が大きいときは特徴点50Tを小さく表示する。仮に撮像画像40のスケールに対し、照準点画像50のスケールを2倍にした場合、特徴点50Tからの照準点50Aまでの距離は、撮像画像40における射撃目標40Tから撮像中心40Cまでの距離の2倍とする。
射撃目標Tまでの距離は、操作部12を操作して、図示しない位置情報入力画面において、射座の位置情報と標的の位置情報を入力することで指定する。
【0025】
図2の説明に戻ると、次いでトリガ操作を検出したか否か判断する(S13)。この判断は、トリガセンサ5のトリガ検出信号に基づいて行う。
トリガ操作が検出されたときは、そのときの照準点の位置を弾着点として検出する(S14)。
【0026】
次いで、表示画像を生成する(S15)。
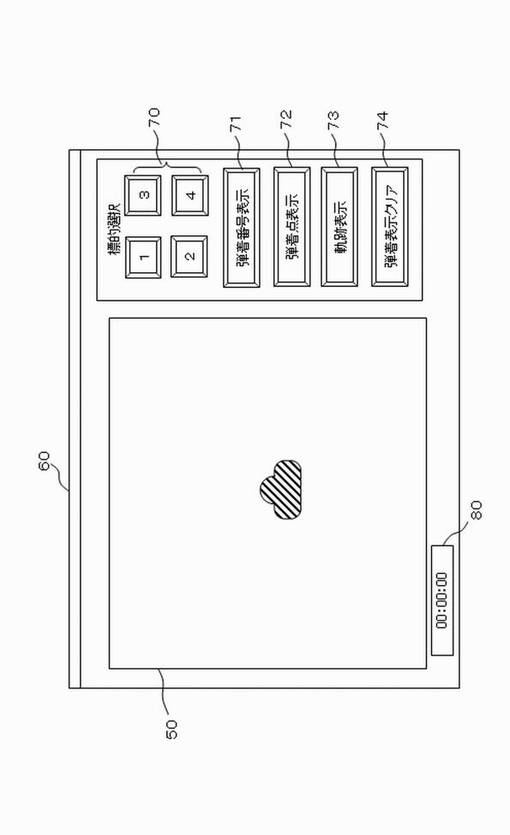
図4は、表示画像の基本構成を示す図である。
図4において符号60は、表示画像生成部3で生成され、表示部13,8に表示される表示画像(画面)である。
表示画像60は、上述の照準点画像50の表示領域を有する。また、表示画像60は、表示項目指示ボタンを表示する領域を備える。この領域には、表示項目指示ボタンとして、標的選択ボタン70と、弾着番号表示ボタン71と、弾着点表示ボタン72と、軌跡表示ボタン73と、弾着表示クリアボタン74とが表示される。各ボタンは、使用者が操作部12によってクリック等の操作を行うことにより、選択、非選択の切替を行うことができる。
また、表示画像60は、時間表示領域80を備える。
【0027】
標的選択ボタン70は複数個(図示の例では4個)設けられる。標的選択ボタン70のいずれかを選択することで、照準点画像50を表示したい標的(銃)が選択される。
弾着番号表示ボタン71は、各弾着点の時間的順序の表示、非表示を切替えるためのボタンで、弾着点表示ボタン72と組み合わせて使用される。
弾着点表示ボタン72は、弾着点の表示、非表示を切替えるためのボタンである。
軌跡表示ボタン73は、照準点の軌跡の表示、非表示を切替えるためのボタンである。
弾着表示クリアボタン74は、表示されている照準点や弾着点を消去するためのボタンである。
【0028】
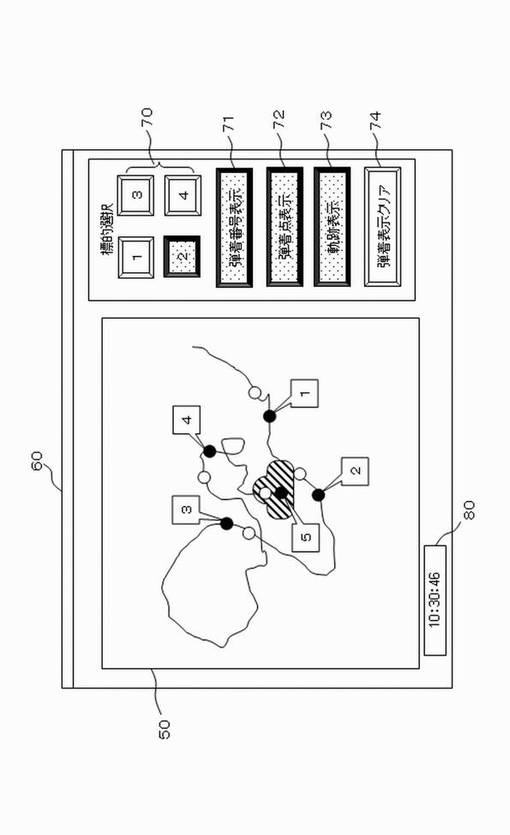
図5は、表示画像60の表示例を示す図である。
図5では、標的選択ボタン70によってNo.2の標的に関する画像(当該標的に対して射撃訓練を行う銃4の照準点画像)が選択されると共に、ボタン71,72,73が選択されることで、照準点50Aの軌跡、弾着点、弾着番号の表示が使用者によって指示されている。
図5において、黒丸が弾着点を示し、その黒丸に付された数字が弾着番号を示す。また、黒丸同士を結ぶ線が照準点の軌跡である。
時間表示領域80に表示される時間は、実際に射撃訓練が行われていた時間であり、照準点の軌跡に対応する時間が表示される。逆に、操作部12を操作して任意の時間を時間表示領域80に入力することで、その時点の照準点を表示することもできる。
【0029】
尚、図2のフローチャートにおいて、射撃目標40Tが抽出できなかった場合(S11で否定)は、S12からS14の処理はスキップすると共に、表示画像60において、照準点画像50には特徴点50Tのみ表示し、ボタン71から74は選択できないようにする。
また、トリガ操作が検出されなかった場合(S13で否定)は、S14の処理をスキップすると共に、表示画像60において、ボタン71,72は選択できないようにする。
【0030】
以上のように、本願発明に係る射撃訓練装置1にあっては、銃4の照準点を確認するにあたり、レーザ光を使用しないように構成したので、使用環境に関わらず照準点が確認可能である。また、カメラ2の撮像画像のみで照準点を検出できるため、事前の煩雑な調整作業も必要無い。
【0031】
尚、本実施例では、銃4は弾丸の代わりにレーザ光を発射する模擬銃としたが、実弾を発射する銃では、トリガを操作してから実際に弾丸が発射され、弾着するまでにはタイムラグが生じる。そこで、トリガ検出信号が出力された時点をトリガ操作点として表示し、所定時間後の照準点の位置を弾着点として表示してもよい。
この場合は、例えば図5に示すように、トリガ操作点を白丸で示し、弾着点を黒丸で示してもよい。さらに、射撃距離が長い場合には、重力による曲射も考慮し、弾着点の表示位置を射撃距離に応じて下方にシフトするようにしてもよい。
また、予め銃と弾薬のデータを入力しておき、標的の設置場所と射座の距離から弾着点を算出(補正)し表示しても良い。
【0032】
また、射撃目標Tの形状は、図示の例に限られるものではなく、画像認識できる形状であれば他の形状であってもよいし、複数個のマーク等を組み合わせることで認識精度を向上させるようにしてもよい。
また、撮像画像40の撮像中心40Cを銃4の照準点と一致させるようにしたが、撮像中心以外のポイントに照準点を一致させるようにしてもよい。
【0033】
次いで、本願発明の第2の実施の形態に係る射撃訓練装置について説明する。
上述の実施の形態との相違点は照準点の算出処理であり、その他の構成は同一であるため、以下、照準点の算出処理について説明する。
【0034】
図6は、本願発明の第2の実施の形態に係る表示画像生成処理を示すフローチャートである。
上述の実施の形態と同様に、撮像画像40を取得して(S20)、射撃目標40Tを画像認識により抽出する(S21)。
次いで、抽出した射撃目標40Tの座標を算出し(S22)、当該座標を原点を中心に反転させた反転座標を算出する(S23)。
さらに、トリガ操作を検出していれば着弾点の検出を行い(S24,S25)、表示画像を生成する(S26)。
【0035】
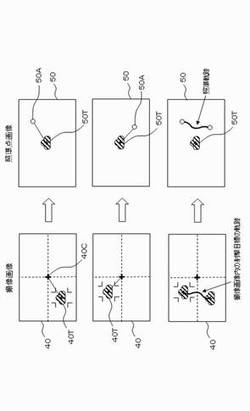
図7は、第2の実施の形態に係る照準点の算出処理を説明する図である。
尚、第2の実施の形態にあっては、表示画像生成部3によって、撮像画像40と照準点画像50の双方に、画像中心を原点とするXY座標が付与されているものとする。
図7に示すように、例えば撮像画像40において射撃目標40Tの座標が(−4,−3)であれば、座標原点たる画像中心40C、即ち照準点は、射撃目標40Tに対して相対的な座標で表すと(4,3)だけずれていることになる。
従って、第2の実施の形態にあっては、照準点画像50において、特徴点50Tを座標の原点に配置すると共に、射撃目標40Tの座標を原点を中心に反転させた座標位置に、照準点50Aを表示するようにした。
即ち、上述した第1の実施の形態では射撃目標40Tを基準とした撮像中心40Cの位置に基づいて照準点50Aを表示したが、第2の実施の形態にあっては、射撃目標40Tの位置のみに基づいて照準点50Aを表示するようにした。
その他の構成は、上記のように第1の実施の形態と同じであるため、説明を省略する
【0036】
このように、第2の実施の形態に係る射撃訓練装置1にあっても、銃4の照準点を確認するにあたり、レーザ光を使用しないため、使用環境に関わらず照準点が確認可能である。また、カメラ2の撮像画像のみで照準点を検出できるため、事前の煩雑な調整作業も必要無い。
【符号の説明】
【0037】
1・・・射撃訓練装置、2・・・カメラ、3・・・表示画面生成部、4・・・銃、5・・・トリガセンサ、8・・・表示部、10・・・統制所、12・・・操作部、13・・・表示部、20・・・標的、21・・・射撃目標、40・・・撮影画像、40C・・・撮像中心、40T・・・射撃目標、50・・・照準点画像、50A・・・照準点、50・・・特徴点、60・・・表示画面
【技術分野】
【0001】
本発明は、銃の照準点を確認することのできる射撃訓練装置に関する。
【背景技術】
【0002】
標的を使用して射撃訓練を行う射撃訓練装置が知られている。例えば特許文献1に記載される技術にあっては、銃から実弾を発射し、標的に弾丸が弾着した際に発生する衝撃を標的側で検出して弾着数を計数し、その計数結果を射撃側に無線伝送して表示又はプリントアウトするように構成している。
上記した特許文献1に記載される射撃訓練装置では、射撃手は一連の射撃訓練終了後に弾着点を確認することはできるが、照準点は確認することができない。
照準点を確認する技術としては、以下の方式が知られている。
(1)銃にレーザ送信機と受信機を取り付けると共に、標的にレーザ光の反射板を設置する。レーザ送信機から送信して反射板で反射したレーザ光を受信機で受信し、PSD法で解析する。
(2)銃にレーザ送信機を取り付け、スクリーン等へレーザ光の送信を行い、カメラでスクリーン上のレーザの照射点を撮影する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−142092号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記した(1)(2)の方式には、以下のような問題点があった。
・反射距離の調整が煩雑である。
・標的側にカメラが必要であり、設置が固定式になると共に、調整に時間を要する。
・屋外などの明るい環境ではレーザの照射点が見えない。
・太陽光などのレーザ光以外の強い光を受ける環境では、受光側が正確に弾着位置を判定できない。
【0005】
本願発明は、上述の背景からなされたものであって、使用環境に関わらず照準点が確認可能であると共に、煩雑な調整作業が必要無い射撃訓練装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本願発明に係る射撃訓練装置にあっては、銃に取り付けられ、撮像画像内の所定ポイントが前記銃の照準方向と一致させられるカメラと、前記カメラの撮像画像の中から射撃目標を画像認識する画像認識手段と、前記射撃目標を示す特徴点と前記銃の照準点とを含む照準点画像を生成する画像生成手段とを備え、前記画像生成手段は、前記特徴点を前記照準点画像内の所定位置に表示すると共に、前記所定位置を基準としたときの、前記撮像画像における前記射撃目標に対する前記所定ポイントの位置に、前記照準点を表示するように構成した。
【0007】
また、本願発明に係る射撃訓練装置にあっては、銃に取り付けられ、撮像画像内の所定ポイントが前記銃の照準方向と一致させられるカメラと、前記カメラの撮像画像に、前記所定ポイントを原点とするXY座標を付与する座標付与手段と、前記カメラの撮像画像の中から射撃目標を画像認識する画像認識手段と、前記画像認識した射撃目標の座標を算出する座標算出手段と、前記算出した座標を、前記原点を中心に反転させた反転座標を算出する反転座標算出手段と、前記射撃目標を示す特徴点と前記銃の照準点とを含む照準点画像を生成する画像生成手段とを備え、前記画像生成手段は、前記照準点画像にXY座標を付与し、当該XY座標の原点に前記特徴点を表示すると共に、当該XY座標上の前記反転座標位置に前記照準点を表示するように構成した。
【発明の効果】
【0008】
本願に係る射撃訓練装置にあっては、使用環境に関わらず照準点が確認可能であると共に、煩雑な調整作業が必要無い。
【図面の簡単な説明】
【0009】
【図1】本願発明に係る射撃訓練装置の構成を示す図である。
【図2】図1に示した表示画像生成部で実行される処理を示すフローチャートである。
【図3】図1に示した表示画像生成部における照準点の算出手法を説明する図である。
【図4】図1に示した表示画像生成部で生成される表示画像の基本構成を示す図である。
【図5】図1に示した表示画像生成部で生成される表示画像の例を示す図である。される表示画面の一例である。
【図6】本願発明の第2の実施の形態に係る表示画像生成部の処理を示すフローチャートである。
【図7】本願発明の第2の実施の形態に係る照準点の算出手法を説明する図である。
【発明を実施するための形態】
【0010】
以下、本願発明の実施形態を説明する。
図1は、本願発明に係る射撃訓練装置の構成を示す図である。
図1に示すように、本願発明に係る射撃訓練装置1は、カメラ2と表示画像生成部3とを備える。
【0011】
カメラ2は、銃4に取り付けられる。カメラ2は、その撮像中心(所定ポイント)が銃4の照準方向と一致するように、銃4に取り付けられる。ここで「撮像中心」とは、カメラ2の撮像画像の中心を意味する。
また、銃4にはトリガセンサ5が取り付けられる。トリガセンサ5は、銃4のトリガ6の操作を検出する検出部であり、トリガ6の操作を検出すると所定の信号(以下「トリガ検出信号」という)を出力する。
尚、銃4は、トリガ6が操作されると、弾丸を模擬したレーザ光を発射する。
【0012】
カメラ2とトリガセンサ5は、送受信機7に接続される。送受信機7には、表示部(ディスプレイ)8が接続される。表示部8は、射手がその表示内容を確認できるよう、銃4の近傍に配置される。
【0013】
表示画像生成部3は、後述する画像生成処理を行う処理部であり、その機能は統制所10に配置されたコンピュータ等のハードウェア資源を利用して実現される。統制所10にはさらに、表示画像生成部3に接続される送受信機11と、キーボードやマウス等の操作部12と、表示部(ディスプレイ)13とが設けられる。
【0014】
図1において符号20は標的である。標的20には、射撃目標Tが描かれる。図示の例では、標的20に射撃目標Tを描いているが、射撃目標T自体を立体形状の標的としてもよい。
【0015】
次いで、射撃訓練装置1の動作の概要について説明する。
カメラ2で撮像された画像(具体的にはそのデータ)とトリガセンサ5のトリガ検出信号は、送受信機7に入力される。
カメラ2の撮像中心は、上記したように銃4の照準方向と一致させられるため、射手によって銃4が射撃目標Tに向けられた状態では、当該射撃目標Tが撮像画像内に含まれることになる。
送受信機7は、入力した撮像画像とトリガ検出信号に時間情報を付すと共に、圧縮処理や変調処理などを施し、無線送信を行う。尚、カメラ2に時間情報を持たせ、カメラ2で撮像画像に時間情報を重畳させるようにしてもよい。
【0016】
尚、図示は省略するが、銃4と標的20は複数設けられる。それぞれの銃4には、カメラ2とトリガセンサ5が取り付けられると共に、送受信機7が接続される。各送受信機7は、それぞれ異なる無線チャネルで送受信を行う。
【0017】
送受信機7から無線送信された撮像画像とトリガ検出信号は、統制所10の送受信機11で受信され、復調処理や伸張処理などが施された後、表示画像生成部3に入力される。表示画像生成部3は、入力した撮像画像とトリガ検出信号、及び、操作部12からの表示項目選択指示(後述)に基づき、銃4の照準点や弾着点を表示した表示画像を生成する。尚、表示画像生成部3は図示しない記憶部(レコーダー)を備え、当該記憶部に入力した撮像画像やトリガ検出信号を保存することで、操作部12からの入力に応じた任意のタイミングで任意の画像を生成することができる。
【0018】
表示画面生成部3で生成された表示画像のデータは表示部13に出力され、当該表示部13に表示される。また、表示画像のデータは送受信機11にも入力され、そこで圧縮処理や変調処理などが施された後、射手側の送受信機7に無線送信される。送受信機7で受信された表示画像のデータは、復調処理や伸張処理などが施された後、表示部8に出力され、当該表示部8に表示される。
【0019】
尚、射手側にも表示画像生成部3や操作部12と同様な機能を設け、射手側において任意のタイミングで、任意の画像を生成できるようにしてもよい。
また、射手側と統制所10の間を送受信機7と送受信機11で無線接続したが、カメラ2、トリガセンサ5、及び表示部8のそれぞれを、統制所10に有線で接続するようにしてもよい。
【0020】
次いで、表示画像生成部3の処理について詳説する。
図2は、表示画像生成部3で実行される処理を示すフローチャートである。
表示画像生成部3は、先ず撮像画像のデータを取得(入力)する(S10)。そして、取得した撮像画像の中から射撃目標Tを画像認識により抽出する(S11)。射撃目標Tを抽出した場合は、撮像画像内における当該射撃目標Tの位置と撮像中心に基づいて、照準点を算出する(S12)。
【0021】
図3は、照準点の算出を説明する図である。
図3において、カメラ2の撮像画像を符号40で示し、表示画像生成部3で生成した照準点画像を符号50で示す。
撮像画像40において、符号40Cは撮像中心を示す。また、符号40Tは、撮像画像40内の射撃目標Tを示す。
上述したように、カメラ2は、その撮像中心40Cが銃4の照準方向と一致するように銃4に取り付けられる。即ち、撮像中心40Cは、銃4の照準点を示すこととなる。
【0022】
照準点画像50において、符号50Tは射撃目標Tを示す特徴点である。特徴点50Tは、本実施例にあっては、射撃目標Tと同じ形状を呈する画像として表示される。
特徴点50Tは、照準点画像50内の所定位置(固定位置)に表示される。本実施例では、照準点画像50の中心に特徴点50Tを表示するものとする。
【0023】
撮像画像40において、撮像中心40Cは銃4の照準点を示すことになる。そこで、照準点画像50において、特徴点50Tを所定位置に表示すると共に、当該所定位置を基準としたときの、撮像画像40における射撃目標40Tに対する撮像中心40Cの位置に、照準点50Aを表示する。
換言すれば、照準点画像50における特徴点50Tに対する照準点50Aの相対位置が、撮像画像40における射撃目標40Tに対する画像中心40Cの相対位置と一致するように、照準点50Tの位置を決定して表示する。
また、撮像画像40内における射撃目標40Tの位置が移動した場合、射撃目標40Tを基準とした撮像中心40Cの軌跡を求めれば、照準点画像50において照準点50Aの軌跡も表示することができる。
【0024】
尚、カメラ2の撮像画像40のスケールと照準点画像50のスケールは、必ずしも一致させる必要はなく、射撃目標Tまでの距離に応じて、照準点画像50における特徴点50Tの大きさや照準点50Aの位置(特徴点50Tからの距離)は適宜調整される。具体的には、射撃目標Tまでの距離が小さいときは、特徴点50Tを大きく表示し、距離が大きいときは特徴点50Tを小さく表示する。仮に撮像画像40のスケールに対し、照準点画像50のスケールを2倍にした場合、特徴点50Tからの照準点50Aまでの距離は、撮像画像40における射撃目標40Tから撮像中心40Cまでの距離の2倍とする。
射撃目標Tまでの距離は、操作部12を操作して、図示しない位置情報入力画面において、射座の位置情報と標的の位置情報を入力することで指定する。
【0025】
図2の説明に戻ると、次いでトリガ操作を検出したか否か判断する(S13)。この判断は、トリガセンサ5のトリガ検出信号に基づいて行う。
トリガ操作が検出されたときは、そのときの照準点の位置を弾着点として検出する(S14)。
【0026】
次いで、表示画像を生成する(S15)。
図4は、表示画像の基本構成を示す図である。
図4において符号60は、表示画像生成部3で生成され、表示部13,8に表示される表示画像(画面)である。
表示画像60は、上述の照準点画像50の表示領域を有する。また、表示画像60は、表示項目指示ボタンを表示する領域を備える。この領域には、表示項目指示ボタンとして、標的選択ボタン70と、弾着番号表示ボタン71と、弾着点表示ボタン72と、軌跡表示ボタン73と、弾着表示クリアボタン74とが表示される。各ボタンは、使用者が操作部12によってクリック等の操作を行うことにより、選択、非選択の切替を行うことができる。
また、表示画像60は、時間表示領域80を備える。
【0027】
標的選択ボタン70は複数個(図示の例では4個)設けられる。標的選択ボタン70のいずれかを選択することで、照準点画像50を表示したい標的(銃)が選択される。
弾着番号表示ボタン71は、各弾着点の時間的順序の表示、非表示を切替えるためのボタンで、弾着点表示ボタン72と組み合わせて使用される。
弾着点表示ボタン72は、弾着点の表示、非表示を切替えるためのボタンである。
軌跡表示ボタン73は、照準点の軌跡の表示、非表示を切替えるためのボタンである。
弾着表示クリアボタン74は、表示されている照準点や弾着点を消去するためのボタンである。
【0028】
図5は、表示画像60の表示例を示す図である。
図5では、標的選択ボタン70によってNo.2の標的に関する画像(当該標的に対して射撃訓練を行う銃4の照準点画像)が選択されると共に、ボタン71,72,73が選択されることで、照準点50Aの軌跡、弾着点、弾着番号の表示が使用者によって指示されている。
図5において、黒丸が弾着点を示し、その黒丸に付された数字が弾着番号を示す。また、黒丸同士を結ぶ線が照準点の軌跡である。
時間表示領域80に表示される時間は、実際に射撃訓練が行われていた時間であり、照準点の軌跡に対応する時間が表示される。逆に、操作部12を操作して任意の時間を時間表示領域80に入力することで、その時点の照準点を表示することもできる。
【0029】
尚、図2のフローチャートにおいて、射撃目標40Tが抽出できなかった場合(S11で否定)は、S12からS14の処理はスキップすると共に、表示画像60において、照準点画像50には特徴点50Tのみ表示し、ボタン71から74は選択できないようにする。
また、トリガ操作が検出されなかった場合(S13で否定)は、S14の処理をスキップすると共に、表示画像60において、ボタン71,72は選択できないようにする。
【0030】
以上のように、本願発明に係る射撃訓練装置1にあっては、銃4の照準点を確認するにあたり、レーザ光を使用しないように構成したので、使用環境に関わらず照準点が確認可能である。また、カメラ2の撮像画像のみで照準点を検出できるため、事前の煩雑な調整作業も必要無い。
【0031】
尚、本実施例では、銃4は弾丸の代わりにレーザ光を発射する模擬銃としたが、実弾を発射する銃では、トリガを操作してから実際に弾丸が発射され、弾着するまでにはタイムラグが生じる。そこで、トリガ検出信号が出力された時点をトリガ操作点として表示し、所定時間後の照準点の位置を弾着点として表示してもよい。
この場合は、例えば図5に示すように、トリガ操作点を白丸で示し、弾着点を黒丸で示してもよい。さらに、射撃距離が長い場合には、重力による曲射も考慮し、弾着点の表示位置を射撃距離に応じて下方にシフトするようにしてもよい。
また、予め銃と弾薬のデータを入力しておき、標的の設置場所と射座の距離から弾着点を算出(補正)し表示しても良い。
【0032】
また、射撃目標Tの形状は、図示の例に限られるものではなく、画像認識できる形状であれば他の形状であってもよいし、複数個のマーク等を組み合わせることで認識精度を向上させるようにしてもよい。
また、撮像画像40の撮像中心40Cを銃4の照準点と一致させるようにしたが、撮像中心以外のポイントに照準点を一致させるようにしてもよい。
【0033】
次いで、本願発明の第2の実施の形態に係る射撃訓練装置について説明する。
上述の実施の形態との相違点は照準点の算出処理であり、その他の構成は同一であるため、以下、照準点の算出処理について説明する。
【0034】
図6は、本願発明の第2の実施の形態に係る表示画像生成処理を示すフローチャートである。
上述の実施の形態と同様に、撮像画像40を取得して(S20)、射撃目標40Tを画像認識により抽出する(S21)。
次いで、抽出した射撃目標40Tの座標を算出し(S22)、当該座標を原点を中心に反転させた反転座標を算出する(S23)。
さらに、トリガ操作を検出していれば着弾点の検出を行い(S24,S25)、表示画像を生成する(S26)。
【0035】
図7は、第2の実施の形態に係る照準点の算出処理を説明する図である。
尚、第2の実施の形態にあっては、表示画像生成部3によって、撮像画像40と照準点画像50の双方に、画像中心を原点とするXY座標が付与されているものとする。
図7に示すように、例えば撮像画像40において射撃目標40Tの座標が(−4,−3)であれば、座標原点たる画像中心40C、即ち照準点は、射撃目標40Tに対して相対的な座標で表すと(4,3)だけずれていることになる。
従って、第2の実施の形態にあっては、照準点画像50において、特徴点50Tを座標の原点に配置すると共に、射撃目標40Tの座標を原点を中心に反転させた座標位置に、照準点50Aを表示するようにした。
即ち、上述した第1の実施の形態では射撃目標40Tを基準とした撮像中心40Cの位置に基づいて照準点50Aを表示したが、第2の実施の形態にあっては、射撃目標40Tの位置のみに基づいて照準点50Aを表示するようにした。
その他の構成は、上記のように第1の実施の形態と同じであるため、説明を省略する
【0036】
このように、第2の実施の形態に係る射撃訓練装置1にあっても、銃4の照準点を確認するにあたり、レーザ光を使用しないため、使用環境に関わらず照準点が確認可能である。また、カメラ2の撮像画像のみで照準点を検出できるため、事前の煩雑な調整作業も必要無い。
【符号の説明】
【0037】
1・・・射撃訓練装置、2・・・カメラ、3・・・表示画面生成部、4・・・銃、5・・・トリガセンサ、8・・・表示部、10・・・統制所、12・・・操作部、13・・・表示部、20・・・標的、21・・・射撃目標、40・・・撮影画像、40C・・・撮像中心、40T・・・射撃目標、50・・・照準点画像、50A・・・照準点、50・・・特徴点、60・・・表示画面
【特許請求の範囲】
【請求項1】
銃に取り付けられ、撮像画像内の所定ポイントが前記銃の照準方向と一致させられるカメラと、
前記カメラの撮像画像の中から射撃目標を画像認識する画像認識手段と、
前記射撃目標を示す特徴点と前記銃の照準点とを含む照準点画像を生成する画像生成手段と、を備え、
前記画像生成手段は、前記特徴点を前記照準点画像内の所定位置に表示すると共に、前記所定位置を基準としたときの、前記撮像画像における前記射撃目標に対する前記所定ポイントの位置に、前記照準点を表示することを特徴とする射撃訓練装置。
【請求項2】
前記銃のトリガの操作を検出するトリガセンサを備え、
前記画像生成手段は、前記トリガセンサが操作されたときの前記照準点を前記銃の弾着点として表示することを特徴とする請求項1に記載の射撃訓練装置。
【請求項3】
銃に取り付けられ、撮像画像内の所定ポイントが前記銃の照準方向と一致させられるカメラと、
前記カメラの撮像画像に、前記所定ポイントを原点とするXY座標を付与する座標付与手段と、
前記カメラの撮像画像の中から射撃目標を画像認識する画像認識手段と、
前記画像認識した射撃目標の座標を算出する座標算出手段と、
前記算出した座標を、前記原点を中心に反転させた反転座標を算出する反転座標算出手段と、
前記射撃目標を示す特徴点と前記銃の照準点とを含む照準点画像を生成する画像生成手段と、を備え、
前記画像生成手段は、前記照準点画像にXY座標を付与し、当該XY座標の原点に前記特徴点を表示すると共に、当該XY座標上の前記反転座標位置に前記照準点を表示することを特徴とする射撃訓練装置。
【請求項4】
前記銃のトリガの操作を検出するトリガセンサを備え、前記画像生成手段は、前記トリガセンサが操作されたときの前記照準点を前記銃の弾着点として表示することを特徴とする請求項3に記載の射撃訓練装置。
【請求項1】
銃に取り付けられ、撮像画像内の所定ポイントが前記銃の照準方向と一致させられるカメラと、
前記カメラの撮像画像の中から射撃目標を画像認識する画像認識手段と、
前記射撃目標を示す特徴点と前記銃の照準点とを含む照準点画像を生成する画像生成手段と、を備え、
前記画像生成手段は、前記特徴点を前記照準点画像内の所定位置に表示すると共に、前記所定位置を基準としたときの、前記撮像画像における前記射撃目標に対する前記所定ポイントの位置に、前記照準点を表示することを特徴とする射撃訓練装置。
【請求項2】
前記銃のトリガの操作を検出するトリガセンサを備え、
前記画像生成手段は、前記トリガセンサが操作されたときの前記照準点を前記銃の弾着点として表示することを特徴とする請求項1に記載の射撃訓練装置。
【請求項3】
銃に取り付けられ、撮像画像内の所定ポイントが前記銃の照準方向と一致させられるカメラと、
前記カメラの撮像画像に、前記所定ポイントを原点とするXY座標を付与する座標付与手段と、
前記カメラの撮像画像の中から射撃目標を画像認識する画像認識手段と、
前記画像認識した射撃目標の座標を算出する座標算出手段と、
前記算出した座標を、前記原点を中心に反転させた反転座標を算出する反転座標算出手段と、
前記射撃目標を示す特徴点と前記銃の照準点とを含む照準点画像を生成する画像生成手段と、を備え、
前記画像生成手段は、前記照準点画像にXY座標を付与し、当該XY座標の原点に前記特徴点を表示すると共に、当該XY座標上の前記反転座標位置に前記照準点を表示することを特徴とする射撃訓練装置。
【請求項4】
前記銃のトリガの操作を検出するトリガセンサを備え、前記画像生成手段は、前記トリガセンサが操作されたときの前記照準点を前記銃の弾着点として表示することを特徴とする請求項3に記載の射撃訓練装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−13284(P2012−13284A)
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願番号】特願2010−149017(P2010−149017)
【出願日】平成22年6月30日(2010.6.30)
【出願人】(000001122)株式会社日立国際電気 (5,007)
【Fターム(参考)】
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願日】平成22年6月30日(2010.6.30)
【出願人】(000001122)株式会社日立国際電気 (5,007)
【Fターム(参考)】
[ Back to top ]