
導入送出装置
【課題】秤量手段に搬入する容器の種類を自在に選択でき、しかもその容器の切り替えを迅速に行える導入送出装置を提供する。
【解決手段】導入送出装置1は、容器搬送手段43により搬送される容器3をローラーコンベヤ7のローラー53で支持し、昇降駆動手段が移載プッシャーの爪部69を上昇させ、進退駆動手段が爪部69を前進させる動作に従わせ容器3をローラーコンベヤ7から送り出す。また、導入送出装置1は、昇降駆動手段が爪部69を下降させ、容器押出手段45の底受部材49から押し出される容器3をローラーコンベヤ7のローラー53で支持し、昇降駆動手段が爪部69を上昇させ、進退駆動手段が爪部69を前進させる動作に従わせ容器5をローラーコンベヤ7から送り出す。
【解決手段】導入送出装置1は、容器搬送手段43により搬送される容器3をローラーコンベヤ7のローラー53で支持し、昇降駆動手段が移載プッシャーの爪部69を上昇させ、進退駆動手段が爪部69を前進させる動作に従わせ容器3をローラーコンベヤ7から送り出す。また、導入送出装置1は、昇降駆動手段が爪部69を下降させ、容器押出手段45の底受部材49から押し出される容器3をローラーコンベヤ7のローラー53で支持し、昇降駆動手段が爪部69を上昇させ、進退駆動手段が爪部69を前進させる動作に従わせ容器5をローラーコンベヤ7から送り出す。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、相互の向きを違えた複数の経路から供給される容器を一定の向きに送り出す導入送出装置に関する。
【背景技術】
【0002】
従来、選果場で秤量機に載せられた容器に青果物を投下し、この容器に投下された青果物を秤量機によって秤量している。容器に投下された青果物の荷重が所定値に達したところで青果物の投下が中断される。この間に、青果物で満たされた容器が他所へ搬出され、新たに空の容器が秤量機に搬入される。秤量機に容器を搬入する手段として、秤量機の近傍にコンベヤで容器を搬送し、このコンベヤから秤量機へ向けて容器を押し出す揺動アームが下記の特許文献に示されている。
【0003】
しかしながら容器の形態は多様であり、その種類毎に容器の供給される経路は異なる。例えば、合成樹脂製のコンテナはローラーコンベヤで水平方向に搬送され、段ボール箱は鉛直シュートに従い秤量機の近傍まで案内されるので、複数種の容器の供給される経路を統一するのは困難である。そのため、秤量機に搬入する容器を複数種の容器の中から自在に選択できることが望まれている。或いは、秤量機に搬入する容器の切り替えを迅速に行えることが望まれている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実開52−8460号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上記の実情に鑑みて為されたものであり、秤量手段に搬入する容器の種類を自在に選択でき、しかもその容器の切り替えを迅速に行える導入送出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、容器を搬送する容器搬送手段と、相互に水平方向に間隔を空けて容器を支持する複数のローラーを並列し、前記ローラーを回転させることにより容器を搬送するローラーコンベヤと、前記複数のローラーの間を通過できる移載プッシャーを前記ローラーコンベヤによる容器の搬送方向に直交する送出方向に前進、又は後退させる進退駆動手段と、前記移載プッシャーを前記ローラーコンベヤのローラーの間に没入させ、又は前記ローラーの上方へ突出するよう昇降させる昇降駆動手段と、前記移載プッシャーの後退する向きの後方に設けた底受部材で容器を受け止め、前記送出方向に進退する供給プッシャーにより、前記底受部材の受け止めた容器を前記ローラーコンベヤに押し出す容器押出手段とを備え、前記容器搬送手段により搬送される容器を前記ローラーコンベヤのローラーで支持し、前記昇降駆動手段が前記移載プッシャーを上昇させ、前記進退駆動手段が前記移載プッシャーを前進させる動作に従わせ、前記ローラーで支持された容器を前記ローラーコンベヤから送り出し、前記昇降駆動手段が前記移載プッシャーを下降させ、前記容器押出手段の底受部材から押し出される容器を前記ローラーコンベヤのローラーで支持し、前記昇降駆動手段が前記移載プッシャーを上昇させ、前記進退駆動手段が前記移載プッシャーを前進させる動作に従わせ、前記ローラーで支持された容器を前記ローラーコンベヤから送り出すことを特徴とする。
【0007】
また、本発明は、2つの前記容器搬送手段が前記ローラーコンベヤに対して、その搬送方向の両側に配置されたことを特徴とする。
【発明の効果】
【0008】
本発明に係る導入送出装置によれば、複数の容器がそれぞれ異なる経路からローラーコンベヤへ供給される向きに関わりなく、これらの容器から選択される一つの容器をローラーコンベヤのローラーに支持させることができる。更に、ローラーコンベヤのローラーに支持された容器は、進退駆動手段の移載プッシャーの前進する動作に従いローラーコンベヤから送り出され、支持手段に乗り移った段階で秤量手段に搬入されることになる。このように本発明に係る導入送出装置は、複数の経路から供給される何れか一つの容器を秤量手段に容易に搬入することができる。
【0009】
しかも、容器が容器押出手段からローラーコンベヤに供給されるとき、昇降駆動手段が移載プッシャーをローラーコンベヤのローラーの間に没入させるので、底受部材からローラーコンベヤへ押し出される容器の行程が移載プッシャーによって遮られることはない。このため、本発明に係る導入送出装置によれば、容器搬送手段により搬送される容器がローラーコンベヤに供給された後直に、容器押出手段から押し出される容器をローラーコンベヤに迅速に供給することができる。或いは、容器搬送手段により搬送される容器をローラーコンベヤに供給するときは、昇降駆動手段は移載プッシャーをローラーコンベヤのローラーの間に没入させなくて良い。このため、本発明に係る導入送出装置によれば、容器押出手段から押し出される容器をローラーコンベヤに供給した直後に、容器搬送手段により搬送される容器をローラーコンベヤに迅速に供給することができる。
【図面の簡単な説明】
【0010】
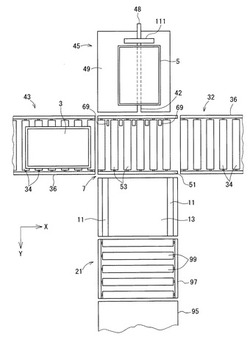
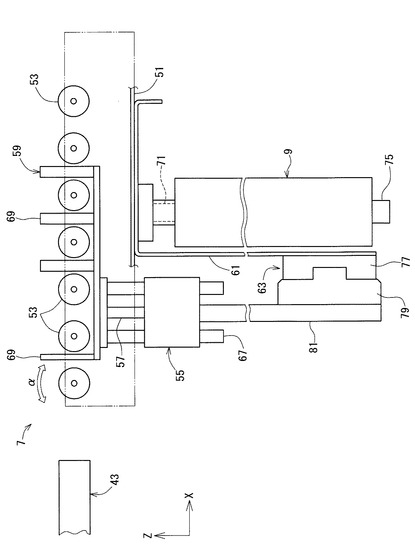
【図1】本発明の実施形態に係る導入送出装置を俯瞰した概略図。
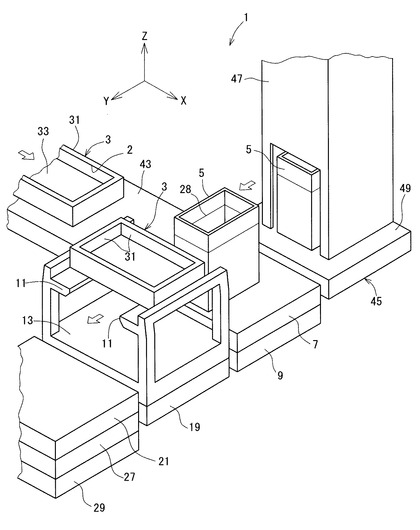
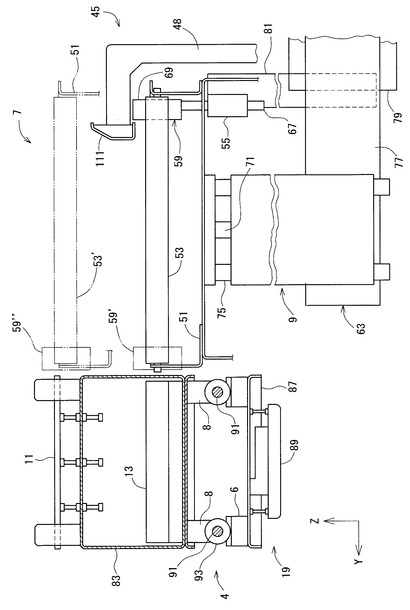
【図2】本発明の実施形態に係る導入送出装置の概要を示す斜視図。
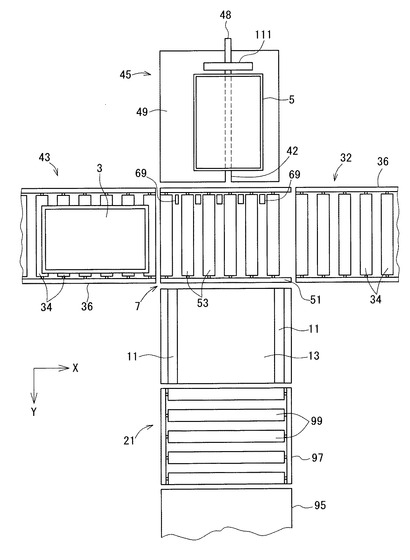
【図3】本発明の実施形態に係る導入送出装置に適用したローラーコンベヤ、移載プッシャー、容器搬送手段、及び容器押出手段の斜視図。
【図4】本発明の実施形態に係る導入送出装置に適用したローラーコンベヤ、導入昇降手段、容器搬送手段、昇降駆動手段、及び進退駆動手段の正面図。
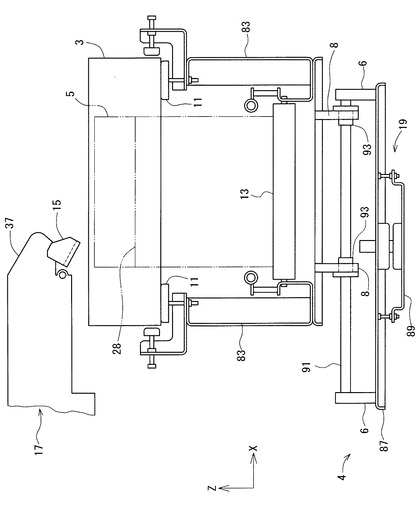
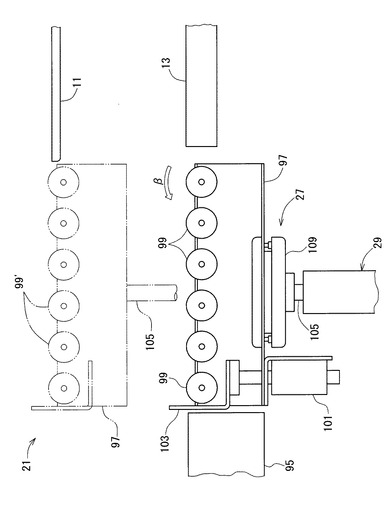
【図5】本発明の実施形態に係る導入送出装置に適用したローラーコンベヤ、導入昇降手段、容器押出手段の供給プッシャー、昇降駆動手段、進退駆動手段、支持手段、及び主秤量手段の側面図。
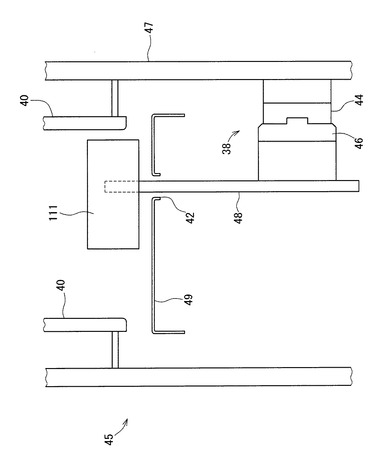
【図6】本発明の実施形態に係る導入送出装置に適用した容器押出手段の正面図。
【図7】本発明の実施形態に係る導入送出装置に適用した移動手段、支持手段、主投下コンベヤ、及び主秤量手段の正面図。
【図8】本発明の実施形態に係る導入送出装置に適用した支持手段、移載コンベヤ、副秤量手段、及び導出昇降手段の側面図。
【発明を実施するための形態】
【0011】
図1,2は、本発明の実施形態に係る導入送出装置1を選果場に設置した例を示している。同図に表れている要素は、容器3,5を支持するローラーコンベヤ7と、ローラーコンベヤ7を昇降させる導入昇降手段9と、ローラーコンベヤ7に隣接する支持手段11,13と、青果物等の内容物mを大出し口15から投下する主投下コンベヤ17と、主秤量手段19と、移載コンベヤ21と、小出し口23から内容物mを投下する副投下コンベヤ25と、副秤量手段27と、移載コンベヤ21を昇降させる導出昇降手段29と、容器3をローラーコンベヤ7に供給する容器搬送手段43と、容器5をローラーコンベヤ7に供給する容器押出手段45である。
【0012】
導入送出装置1について以下の実施例で述べる。実施例に記す駆動源としてエアシリンダー、又はサーボモーター等を適用し、案内手段としてガイドレールにスライダーを係合させた滑り対偶を適用しても良い。また、駆動源、案内手段、伝動部材、及び自明の機械要素を取付ける筐体については、その図示を省略する。
【実施例1】
【0013】
導入送出装置1は、ローラーコンベヤ7と、容器搬送手段43と、容器押出手段45と、昇降駆動手段55と、進退駆動手段63とを備える。矢印X,Yは互いに直交する水平方向を指し、矢印Zは鉛直上方を指している。矢印Xに沿う方向を以下で搬送方向と記し、矢印Yに沿う方向を送出方向と記す。容器3は、その四方の側壁部31を底面33に重なるように折り畳みできる合成樹脂製のコンテナである。容器5は、その上部を折り目線28に沿って内側へ折り込むことにより蓋を形成できる段ボール箱である。容器3,5の仕様、及び材質は何ら限定されない。
【0014】
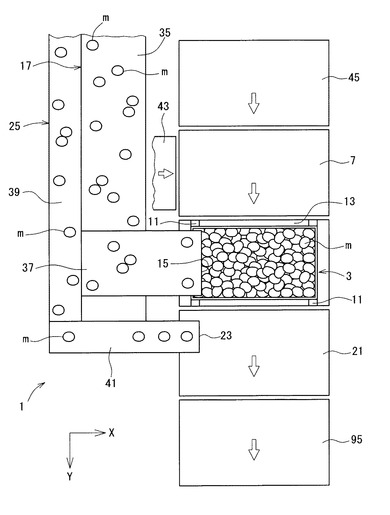
主投下コンベヤ17は、青果物等の内容物mを矢印Yの向きに搬送するベルトコンベヤ35の前方に、内容物mを矢印Xの向きに搬送するベルトコンベヤ37を配置し、ベルトコンベヤ37の終端を大出し口15としたものである。副投下コンベヤ25は、ベルトコンベヤ35に隣接するベルトコンベヤ39の前方に、内容物mを矢印Xの向きに一列に並べて搬送できるローラーコンベヤ41を配置し、ローラーコンベヤ41の終端を小出し口23としたものである。
【0015】
副投下コンベヤ25のベルトコンベヤ39は、主投下コンベヤ17のベルトコンベヤ35,37よりもベルトの幅が狭く、所定の時間当たりに副投下コンベヤ25の小出し口23から投下される内容物mの個数は、主投下コンベヤ17の大出し口15から投下される内容物mの個数よりも少ない。副投下コンベヤ25のローラーコンベヤ41は、内容物mを小出し口23から一つずつ投下できるものであることが好ましい。
【0016】
図2,3に示すように、ベルトコンベヤ35,39の下方に設置された容器搬送手段43、及び容器押出手段45がローラーコンベヤ7に隣接している。図3に示す容器搬送手段32については後述する。容器搬送手段43は、容器3を受け止める複数のローラー34をコンベヤフレーム36で軸受けし、ローラー34を駆動源で回転させることにより、容器3を矢印Xの向きに搬送するローラーコンベヤである。
【0017】
ローラーコンベヤ7は、図3〜図5に示すように、コンベヤフレーム51に軸受けされた複数のローラー53で容器3、又は容器5を受け止め、ローラー53を図4の矢印αで指した方向に回転させる駆動源により、容器3、又は容器5を搬送方向に搬送するものである。複数のローラー53は、相互に搬送方向に間隔を空けて並列されている。昇降駆動手段55は、移載プッシャー59をピストンロッド57に取付けたエアシリンダーであり、そのシリンダーケースにピストンロッド57を鉛直方向に案内するガイドレール67を係合している。
【0018】
移載プッシャー59は、複数のローラー53の間を通過できる櫛歯形の爪部69を有する。昇降駆動手段55がピストンロッド57を上昇させると、移載プッシャー59の爪部69がローラーコンベヤ7のローラー53の上方へ突出する。昇降駆動手段55がピストンロッド57を下降させると、移載プッシャー59の爪部69がローラーコンベヤ7のローラー53の間に没入する。
【0019】
導入昇降手段9は、ローラーコンベヤ7のコンベヤフレーム51にピストンロッド71を連結したエアシリンダーであり、そのシリンダーケースにピストンロッド71を鉛直方向に案内するガイドレール75を係合している。
【0020】
進退駆動手段63は、そのシリンダーケース77に供給される空気圧に基づき、シリンダーケース77に係合したスライダー79を動作させるロッドレスエアシリンダーである。シリンダーケース77は、コンベヤフレーム51に連結部材61を介して連結され、スライダー79は、昇降駆動手段55を保持する保持部材81に連結されている。進退駆動手段63のスライダー79の動作に従い保持部材81、昇降駆動手段55、及び移載プッシャー59が送出方向に進退する。
【0021】
容器押出手段45は、図3,6に示すように、鉛直シュート47の内側を落下する容器5をローラーコンベヤ7の後方で受け止める底受部材49と、供給プッシャー111を送出方向に進退させる送出駆動手段38とを備える。容器5は、ベルトコンベヤ等により鉛直シュート47の近傍まで搬送され、プッシャー等により適時に鉛直シュート47に押し込まれる。鉛直シュート47は、その内側に設けたガイドレール40に従わせて容器5を底受部材49まで案内する。
【0022】
底受部材49は、送出方向に延びるスリット42を形成した鋼板である。送出駆動手段38は、そのシリンダーケース44に供給される空気圧に基づき、シリンダーケース44に係合したスライダー46を動作させるロッドレスエアシリンダーである。シリンダーケース44は鉛直シュート47に固定され、スライダー46は、スリット42に挿通された連結部材48を介して供給プッシャー111に連結している。
【0023】
図5,7に示すように、主秤量手段19は、支持手段11,13を支持する一対の支持フレーム83をベース板87に移動手段4を介して取付け、容器3、又は容器5から一対の支持フレーム83の受ける荷重をベース板87の底部89に設けた歪みゲージにより計測するものである。支持手段11は、水平方向に延びる一対の案内レールである。支持手段13は、一対の支持フレーム83の間で水平方向に広がる平滑な案内板である。
【0024】
移動手段4は、ベース板87の上面に固定したブラケット6にガイドレール91を架設し、支持フレーム83の脚部8に設けたスライダー93をガイドレール91に係合したものである。図に表れていない駆動源がスライダー93と共に一対の支持フレーム83をベース板87に対して矢印Xの向き、又はその反対向きに移動させるようにしても良い。これにより、支持手段11,13に支持される容器3,5の位置を主投下コンベヤ17の大出し口15の真下になるよう調整することができる。
【0025】
図1,2に示すように移載コンベヤ21に対して矢印Yの向きの前方に、搬出コンベヤ95が設置されている。搬出コンベヤ95は、容器3,5を適所へ搬出できるベルトコンベヤであれば良い。図8に示すように、移載コンベヤ21は、コンベヤフレーム97に軸受けされた複数のローラー99と、ローラー99を矢印βの向きに回転させる駆動源と、コンベヤフレーム97に取付けた駆動源101により昇降するストッパー103とを備える。
【0026】
導出昇降手段29は、ピストンロッド105をコンベヤフレーム97の底部109に連結したエアシリンダーである。副秤量手段27は、容器3、又は容器5からコンベヤフレーム97の受ける荷重を、コンベヤフレーム97の底部109に設けた歪みゲージにより計測するものである。
【0027】
次に導入送出装置1が容器3,5に内容物mを投入する動作を説明する。図面は特に断らない限り、図1〜図3を参照する。以下の動作は、駆動源がオペレータの指令、センサ類からの電気信号、又は個々の駆動源の制御を担うCPUがアクセスできる記憶媒体に書き込まれたプログラムに基づいて成されるものとする。また、文頭に付した英文字は動作の工程を区分する指標である。
【0028】
A:図4に示す昇降駆動手段55がピストンロッド57を上昇させることにより、移載プッシャー59の爪部69をローラーコンベヤ7のローラー53の上方へ突出させる。進退駆動手段63が移載プッシャー59を図5に実線で表した位置まで後退させる。
【0029】
B:導入昇降手段9がピストンロッド71を下降させることにより、ローラーコンベヤ7のローラー53を実線で表した位置に下降させる。この状態で、図4に示す容器搬送手段43が空の容器3をローラーコンベヤ7に供給する。即ち、容器搬送手段43が容器3を矢印Xの向きに搬送し、容器3の端部をローラーコンベヤ7のローラー53に乗り上げさせる。これと同時に、ローラーコンベヤ7がローラー53を駆動させ、容器3をローラー53の回転力で矢印Xの向きに牽引する。これにより、容器3の全体がローラー53に受け止められたところで、ローラー53を停止させる。
【0030】
C:容器押出手段45の供給プッシャー111は、本工程で鉛直シュート47よりも更に矢印Yの反対向きに後退している。導入昇降手段9がピストンロッド71を上昇させ、ローラーコンベヤ7のコンベヤフレーム51に軸受けされたローラーを図5に仮想線53'で表した高さまで上昇させる。これにより、昇降駆動手段55、移載プッシャー59、及び進退駆動手段63がコンベヤフレーム51と共に上昇する。
【0031】
D:進退駆動手段63が移載プッシャーを図5に示す仮想線59"の位置まで前進させる。これにより容器3がローラーコンベヤ7から矢印Yの向きに送り出され、図7に示すように支持手段11に乗り移る。続いて、進退駆動手段63が移載プッシャー59を矢印Yの反対向きに後退させる。
【0032】
E:主投下コンベヤ17のベルトコンベヤ35,37が起動する。これにより大出し口15から内容物mが投下され、支持手段11に支持された容器3の荷重に内容物mの荷重が加算される。この加算された荷重に基づき、主秤量手段19は大出し口15から容器3に投下された内容物mを秤量する。容器3に収納されるべき内容物mの総重量は予め定められており、大出し口15から投下された内容物mの荷重が上記の総重量に達する直前に、ベルトコンベヤ35,37が停止し、内容物mの投下が断たれる。
【0033】
F:図8に示す導出昇降手段29がピストンロッド105を上昇させることにより、移載コンベヤ21のローラーを仮想線99'で表した高さまで上昇させ、移載コンベヤ21の駆動源101がストッパー103をローラー99の上方まで上昇させる。
【0034】
G:上記E工程が行われている間に、以上に述べた容器3に後続する新たな空の容器3を容器搬送手段43がローラーコンベヤ7に供給する。この後続の容器3を対象として導入送出装置1が上記C,Dの工程を繰り返し、後続の容器3を移載プッシャー59によりローラーコンベヤ7から支持手段11に乗り移らせる。この過程で、後続の容器3が上記の総重量に達する直前の量の内容物mを既に投入された先行の容器3に突き当たるので、この先行の容器3は、支持手段11から図8に仮想線99'で表した移載コンベヤ21のローラーに乗り移り、容器3がストッパー103に突き当たる。容器3はストッパー103により移載コンベヤ21に位置決めさせる。
【0035】
H:副投下コンベヤ25のベルトコンベヤ39、及びローラーコンベヤ41が起動する。これにより小出し口23から内容物mが移載コンベヤ21に支持された容器3に投下され、容器3の荷重に内容物mの荷重が加算される。この加算された荷重に基づき、副秤量手段27は小出し口23から容器3に投下された内容物mを秤量する。上記Eの工程で主投下コンベヤ17の大出し口15から投下された内容物mの荷重、及び本工程で小出し口23から投下された内容物mの荷重の総計が上記の総重量に達した時点で、ベルトコンベヤ39、及びローラーコンベヤ41が停止し、内容物mの投下が断たれる。
【0036】
I:図5に示す導入昇降手段9がピストンロッド71を下降させることにより、ローラーコンベヤ7のローラー53を実線で表した高さまで降下させる。
【0037】
J:図8に示す導出昇降手段29がピストンロッド105を下降させることにより、移載コンベヤ21のローラー99を実線で表した位置まで下降させる。駆動源101がストッパー103をローラー99の下方まで下降させる。
【0038】
K:移載コンベヤ21が容器3を搬出コンベヤ95へ搬出する。即ち、移載コンベヤ21がローラー99を回転させることにより容器3を矢印Yの向きに搬送し、容器3の端部を搬出コンベヤ95に乗り上げさせる。これと同時に搬出コンベヤ95が起動し、容器3の全体が搬出コンベヤ95へ送り出される。
【0039】
導入送出装置1は上記B〜Kの工程を再度行っても良い。この場合、昇降駆動手段55が移載プッシャー59の爪部69をローラー53の上方へ突出させた状態を維持するので、上記Dの工程で進退駆動手段63が移載プッシャー59を後退させた時点で、上記Aの工程が完了する。或いは、上記Dの工程で進退駆動手段63が移載プッシャー59を前進させる直前に、昇降駆動手段55が移載プッシャー59の爪部69をローラー53の上方へ突出させ、上記Dの工程で進退駆動手段63が移載プッシャー59を後退させると同時、又はその直後に移載プッシャー59の爪部69をローラー53の間に没入させても良い。
【0040】
図3に示す容器搬送手段32は、図に表れていない容器を矢印Xの反対向きに搬送する点を除き、容器搬送手段43と同様のローラーコンベヤである。容器搬送手段43を停止させ、上記Bの工程で容器搬送手段32が空の容器をローラーコンベヤ7に供給するようにしても良い。この場合、容器搬送手段32により矢印Xの反対向きに搬送される容器の端部がローラー53に乗り上げるのと同時に、ローラーコンベヤ7がローラー53を駆動させ、この容器をローラー53の回転力で矢印Xの反対向きに牽引する。これにより容器の全体がローラー53に受け止められたところでローラー53を停止させる。ここで述べた容器は、上記C〜Kの工程で導入送出装置1の動作する対象として、容器3と同様に内容物mが投下され、最後に搬出コンベヤ95へ送り出される。
【0041】
導入送出装置1は更に以下の工程を行っても良い。この場合、容器搬送手段43による容器3の供給を停止し、容器押出手段45を始動させる。
【0042】
L:図4に示す昇降駆動手段55がピストンロッド57を下降させることにより、移載プッシャー59の爪部69をローラーコンベヤ7のローラー53の間に没入させる。
【0043】
M:図3,6に示す容器押出手段45の送出駆動手段38が供給プッシャー111を鉛直シュート47よりも更に矢印Yの反対向きに後退させる。この状態で、鉛直シュート47から落下する空の容器5が底受部材49に受け止められる。容器押出手段45は、底受部材49に受け止められた容器5をローラーコンベヤ7に供給する。即ち、送出駆動手段38が供給プッシャー111を矢印Yの向きに前進させることにより、容器5を供給プッシャー111に従わせて底受部材49から押し出し、容器5の全体をローラーコンベヤ7のローラー53に受け止めさせる。続いて、送出駆動手段38が供給プッシャー111を鉛直シュート47よりも更に矢印Yの反対向きに再び後退させる。
【0044】
N:図4に示す昇降駆動手段55がピストンロッド57を上昇させることにより、移載プッシャー59をローラー53の上方へ突出させる。更に進退駆動手段63が移載プッシャー59を前進させる。これにより、容器5がローラーコンベヤ7から矢印Yの向きに送り出され、図7に示すように支持手段13に乗り移る。続いて、昇降駆動手段55が移載プッシャー59をローラー53の間に没入させ、進退駆動手段63が移載プッシャー59を矢印Yの反対向きに後退させる。上記Iの工程で導入昇降手段9はローラーコンベヤ7のローラー53を既に降下させている。
【0045】
O:図7に示す主投下コンベヤ17の大出し口15から内容物mが支持手段13に支持された容器5に投下される。主秤量手段19が内容物mの荷重を秤量し、その荷重が予め定められた総重量に達する直前にベルトコンベヤ35,37が停止する点は、上記Eの工程と同様である。
【0046】
P:上記Jの工程で導出昇降手段29が移載コンベヤ21のローラー99を下降させている。この状態で、駆動源101がストッパー103をローラー99の上方まで上昇させる。
【0047】
Q:上記Oの工程が行われている間に、以上に述べた容器5に後続する新たな空の容器5を容器押出手段45がローラーコンベヤ7に供給する。この後続の容器5を移載プッシャー59によりローラーコンベヤ7から支持手段13に乗り移らせる過程で、後続の容器5が既に支持手段13に支持された先行の容器5に突き当たるので、この先行の容器5が支持手段13から図8に実線で表した移載コンベヤ21のローラー99に乗り移り、ストッパー103に突き当たる。容器5はストッパー103により移載コンベヤ21に位置決めさせる。
【0048】
R:副投下コンベヤ25の小出し口23から内容物mが支持手段13に支持された容器5に投下される。これ以外は上記Hの工程と同様である。続いて、駆動源101がストッパー103をローラー99の下方まで下降させ、移載コンベヤ21から容器5が搬出コンベヤ95へ送り出される。
【0049】
導入送出装置1は上記A〜Kの工程を再度行っても良い。或いは、導入送出装置1は更に上記M〜Rの工程を再度行っても良い。この場合、移載プッシャー59の爪部69が上記Nの工程でローラーコンベヤ7のローラー53の間に没入された時点で、上記Lの工程が完了する。
【0050】
以上に述べた導入送出装置1によれば、容器3,5、又は容器搬送手段32により搬送される容器がそれぞれローラーコンベヤ7に供給される向きに関わりなく、これらの容器から選択される容器をローラーコンベヤ7のローラー53に支持させることができる。更に、ローラー53に支持された容器を移載プッシャー59の前進する動作に従わせてローラーコンベヤ7から送り出し、支持手段11、又は支持手段13に乗り移らせることができる。このように、導入送出装置1によれば、以上に述べた何れかの容器を支持手段11,13に支持されるよう搬入するのが容易であり、この容器に投下される内容物mを主秤量手段19、又は副秤量手段27によって秤量することができる。
【0051】
しかも、容器押出手段45から容器5がローラーコンベヤ7に供給されるとき、昇降駆動手段55が移載プッシャー59をローラーコンベヤ7のローラー53の間に没入させるので、底受部材49から矢印Yの向きにローラーコンベヤ7へ押し出される容器5の行程が移載プッシャー59によって遮られることはない。このため、導入送出装置1によれば、容器3がローラーコンベヤ7に供給された後直に、容器5をローラーコンベヤ7に迅速に供給することができる。
【0052】
また、容器搬送手段32から容器がローラーコンベヤ7に供給されるとき、又は容器搬送手段43から容器3がローラーコンベヤ7に供給されるとき、進退駆動手段63が移載プッシャー59を図5に実線で表した位置まで後退させる。この状態で、昇降駆動手段55が移載プッシャー59をローラー53の間に没入させなくても、容器搬送手段32,42からローラーコンベヤ7に供給される容器の行程が移載プッシャー59によって遮られることはない。このため、導入送出装置1によれば、容器5がローラーコンベヤ7に供給された直後に、容器3をローラーコンベヤ7に迅速に供給することができる。
【0053】
尚、本発明は、その趣旨を逸脱しない範囲で当業者の知識に基づき種々なる改良、修正、又は変形を加えた態様でも実施できる。鉛直シュート47、及び搬出コンベヤ95は本発明の必須の要素に必須ではない。容器押出手段45は、容器5を矢印Yの向きに案内できるように下降傾斜したシュートであっても良い。支持手段11,13は容器3,5を支持するローラーであっても良い。
【0054】
以上に述べた容器が全て同種であっても良い。例えば容器5、及び容器搬送手段32からローラーコンベヤ7に供給される容器が、容器3と同種であっても良い。この場合、導入送出装置1が容器3のみを対象に動作できれば良いので、支持手段13を省略することができる。そして、図4に示す容器供給手段7のローラーを仮想線53'の高さに設置し、図8に示す移載コンベヤ21のローラーを仮想線99'の高さに設置しておけば、導入昇降手段9、及び導出昇降手段29は不要である。
【産業上の利用可能性】
【0055】
本発明は、青果物等に限らず、あらゆる物品を箱詰めし秤量するのに有益な技術である。
【符号の説明】
【0056】
1...導入送出装置、3,5...容器、7...ローラーコンベヤ、9...導入昇降手段、11,13...支持手段、15...大出し口、17...主投下コンベヤ、19...主秤量手段、21...移載コンベヤ、23...小出し口、25...副投下コンベヤ、27...副秤量手段、29...導出昇降手段、31...側壁部、33...底面、35,37,39...ベルトコンベヤ、41...ローラーコンベヤ、43...容器搬送手段、45...容器押出手段、47...鉛直シュート、49...底受部材、51,97...コンベヤフレーム、53,99...ローラー、55...昇降駆動手段、57,71,105...ピストンロッド、59...移載プッシャー、61...連結部材、63...進退駆動手段、77...シリンダーケース、67,75,91...ガイドレール、69...爪部、79,93...スライダー、81...保持部材、83...支持フレーム、87...ベース板、89,109...底部、95...搬出コンベヤ、101...駆動源、103...ストッパー、111...供給プッシャー。
【0057】
m...内容物、4...移動手段、6...ブラケット、8...脚部、28...折り目線、32...容器搬送手段、34...ローラー、36...コンベヤフレーム、38...送出駆動手段、40...ガイドレール、42...スリット、44...シリンダーケース、46...スライダー、48...連結部材。
【技術分野】
【0001】
本発明は、相互の向きを違えた複数の経路から供給される容器を一定の向きに送り出す導入送出装置に関する。
【背景技術】
【0002】
従来、選果場で秤量機に載せられた容器に青果物を投下し、この容器に投下された青果物を秤量機によって秤量している。容器に投下された青果物の荷重が所定値に達したところで青果物の投下が中断される。この間に、青果物で満たされた容器が他所へ搬出され、新たに空の容器が秤量機に搬入される。秤量機に容器を搬入する手段として、秤量機の近傍にコンベヤで容器を搬送し、このコンベヤから秤量機へ向けて容器を押し出す揺動アームが下記の特許文献に示されている。
【0003】
しかしながら容器の形態は多様であり、その種類毎に容器の供給される経路は異なる。例えば、合成樹脂製のコンテナはローラーコンベヤで水平方向に搬送され、段ボール箱は鉛直シュートに従い秤量機の近傍まで案内されるので、複数種の容器の供給される経路を統一するのは困難である。そのため、秤量機に搬入する容器を複数種の容器の中から自在に選択できることが望まれている。或いは、秤量機に搬入する容器の切り替えを迅速に行えることが望まれている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実開52−8460号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上記の実情に鑑みて為されたものであり、秤量手段に搬入する容器の種類を自在に選択でき、しかもその容器の切り替えを迅速に行える導入送出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、容器を搬送する容器搬送手段と、相互に水平方向に間隔を空けて容器を支持する複数のローラーを並列し、前記ローラーを回転させることにより容器を搬送するローラーコンベヤと、前記複数のローラーの間を通過できる移載プッシャーを前記ローラーコンベヤによる容器の搬送方向に直交する送出方向に前進、又は後退させる進退駆動手段と、前記移載プッシャーを前記ローラーコンベヤのローラーの間に没入させ、又は前記ローラーの上方へ突出するよう昇降させる昇降駆動手段と、前記移載プッシャーの後退する向きの後方に設けた底受部材で容器を受け止め、前記送出方向に進退する供給プッシャーにより、前記底受部材の受け止めた容器を前記ローラーコンベヤに押し出す容器押出手段とを備え、前記容器搬送手段により搬送される容器を前記ローラーコンベヤのローラーで支持し、前記昇降駆動手段が前記移載プッシャーを上昇させ、前記進退駆動手段が前記移載プッシャーを前進させる動作に従わせ、前記ローラーで支持された容器を前記ローラーコンベヤから送り出し、前記昇降駆動手段が前記移載プッシャーを下降させ、前記容器押出手段の底受部材から押し出される容器を前記ローラーコンベヤのローラーで支持し、前記昇降駆動手段が前記移載プッシャーを上昇させ、前記進退駆動手段が前記移載プッシャーを前進させる動作に従わせ、前記ローラーで支持された容器を前記ローラーコンベヤから送り出すことを特徴とする。
【0007】
また、本発明は、2つの前記容器搬送手段が前記ローラーコンベヤに対して、その搬送方向の両側に配置されたことを特徴とする。
【発明の効果】
【0008】
本発明に係る導入送出装置によれば、複数の容器がそれぞれ異なる経路からローラーコンベヤへ供給される向きに関わりなく、これらの容器から選択される一つの容器をローラーコンベヤのローラーに支持させることができる。更に、ローラーコンベヤのローラーに支持された容器は、進退駆動手段の移載プッシャーの前進する動作に従いローラーコンベヤから送り出され、支持手段に乗り移った段階で秤量手段に搬入されることになる。このように本発明に係る導入送出装置は、複数の経路から供給される何れか一つの容器を秤量手段に容易に搬入することができる。
【0009】
しかも、容器が容器押出手段からローラーコンベヤに供給されるとき、昇降駆動手段が移載プッシャーをローラーコンベヤのローラーの間に没入させるので、底受部材からローラーコンベヤへ押し出される容器の行程が移載プッシャーによって遮られることはない。このため、本発明に係る導入送出装置によれば、容器搬送手段により搬送される容器がローラーコンベヤに供給された後直に、容器押出手段から押し出される容器をローラーコンベヤに迅速に供給することができる。或いは、容器搬送手段により搬送される容器をローラーコンベヤに供給するときは、昇降駆動手段は移載プッシャーをローラーコンベヤのローラーの間に没入させなくて良い。このため、本発明に係る導入送出装置によれば、容器押出手段から押し出される容器をローラーコンベヤに供給した直後に、容器搬送手段により搬送される容器をローラーコンベヤに迅速に供給することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態に係る導入送出装置を俯瞰した概略図。
【図2】本発明の実施形態に係る導入送出装置の概要を示す斜視図。
【図3】本発明の実施形態に係る導入送出装置に適用したローラーコンベヤ、移載プッシャー、容器搬送手段、及び容器押出手段の斜視図。
【図4】本発明の実施形態に係る導入送出装置に適用したローラーコンベヤ、導入昇降手段、容器搬送手段、昇降駆動手段、及び進退駆動手段の正面図。
【図5】本発明の実施形態に係る導入送出装置に適用したローラーコンベヤ、導入昇降手段、容器押出手段の供給プッシャー、昇降駆動手段、進退駆動手段、支持手段、及び主秤量手段の側面図。
【図6】本発明の実施形態に係る導入送出装置に適用した容器押出手段の正面図。
【図7】本発明の実施形態に係る導入送出装置に適用した移動手段、支持手段、主投下コンベヤ、及び主秤量手段の正面図。
【図8】本発明の実施形態に係る導入送出装置に適用した支持手段、移載コンベヤ、副秤量手段、及び導出昇降手段の側面図。
【発明を実施するための形態】
【0011】
図1,2は、本発明の実施形態に係る導入送出装置1を選果場に設置した例を示している。同図に表れている要素は、容器3,5を支持するローラーコンベヤ7と、ローラーコンベヤ7を昇降させる導入昇降手段9と、ローラーコンベヤ7に隣接する支持手段11,13と、青果物等の内容物mを大出し口15から投下する主投下コンベヤ17と、主秤量手段19と、移載コンベヤ21と、小出し口23から内容物mを投下する副投下コンベヤ25と、副秤量手段27と、移載コンベヤ21を昇降させる導出昇降手段29と、容器3をローラーコンベヤ7に供給する容器搬送手段43と、容器5をローラーコンベヤ7に供給する容器押出手段45である。
【0012】
導入送出装置1について以下の実施例で述べる。実施例に記す駆動源としてエアシリンダー、又はサーボモーター等を適用し、案内手段としてガイドレールにスライダーを係合させた滑り対偶を適用しても良い。また、駆動源、案内手段、伝動部材、及び自明の機械要素を取付ける筐体については、その図示を省略する。
【実施例1】
【0013】
導入送出装置1は、ローラーコンベヤ7と、容器搬送手段43と、容器押出手段45と、昇降駆動手段55と、進退駆動手段63とを備える。矢印X,Yは互いに直交する水平方向を指し、矢印Zは鉛直上方を指している。矢印Xに沿う方向を以下で搬送方向と記し、矢印Yに沿う方向を送出方向と記す。容器3は、その四方の側壁部31を底面33に重なるように折り畳みできる合成樹脂製のコンテナである。容器5は、その上部を折り目線28に沿って内側へ折り込むことにより蓋を形成できる段ボール箱である。容器3,5の仕様、及び材質は何ら限定されない。
【0014】
主投下コンベヤ17は、青果物等の内容物mを矢印Yの向きに搬送するベルトコンベヤ35の前方に、内容物mを矢印Xの向きに搬送するベルトコンベヤ37を配置し、ベルトコンベヤ37の終端を大出し口15としたものである。副投下コンベヤ25は、ベルトコンベヤ35に隣接するベルトコンベヤ39の前方に、内容物mを矢印Xの向きに一列に並べて搬送できるローラーコンベヤ41を配置し、ローラーコンベヤ41の終端を小出し口23としたものである。
【0015】
副投下コンベヤ25のベルトコンベヤ39は、主投下コンベヤ17のベルトコンベヤ35,37よりもベルトの幅が狭く、所定の時間当たりに副投下コンベヤ25の小出し口23から投下される内容物mの個数は、主投下コンベヤ17の大出し口15から投下される内容物mの個数よりも少ない。副投下コンベヤ25のローラーコンベヤ41は、内容物mを小出し口23から一つずつ投下できるものであることが好ましい。
【0016】
図2,3に示すように、ベルトコンベヤ35,39の下方に設置された容器搬送手段43、及び容器押出手段45がローラーコンベヤ7に隣接している。図3に示す容器搬送手段32については後述する。容器搬送手段43は、容器3を受け止める複数のローラー34をコンベヤフレーム36で軸受けし、ローラー34を駆動源で回転させることにより、容器3を矢印Xの向きに搬送するローラーコンベヤである。
【0017】
ローラーコンベヤ7は、図3〜図5に示すように、コンベヤフレーム51に軸受けされた複数のローラー53で容器3、又は容器5を受け止め、ローラー53を図4の矢印αで指した方向に回転させる駆動源により、容器3、又は容器5を搬送方向に搬送するものである。複数のローラー53は、相互に搬送方向に間隔を空けて並列されている。昇降駆動手段55は、移載プッシャー59をピストンロッド57に取付けたエアシリンダーであり、そのシリンダーケースにピストンロッド57を鉛直方向に案内するガイドレール67を係合している。
【0018】
移載プッシャー59は、複数のローラー53の間を通過できる櫛歯形の爪部69を有する。昇降駆動手段55がピストンロッド57を上昇させると、移載プッシャー59の爪部69がローラーコンベヤ7のローラー53の上方へ突出する。昇降駆動手段55がピストンロッド57を下降させると、移載プッシャー59の爪部69がローラーコンベヤ7のローラー53の間に没入する。
【0019】
導入昇降手段9は、ローラーコンベヤ7のコンベヤフレーム51にピストンロッド71を連結したエアシリンダーであり、そのシリンダーケースにピストンロッド71を鉛直方向に案内するガイドレール75を係合している。
【0020】
進退駆動手段63は、そのシリンダーケース77に供給される空気圧に基づき、シリンダーケース77に係合したスライダー79を動作させるロッドレスエアシリンダーである。シリンダーケース77は、コンベヤフレーム51に連結部材61を介して連結され、スライダー79は、昇降駆動手段55を保持する保持部材81に連結されている。進退駆動手段63のスライダー79の動作に従い保持部材81、昇降駆動手段55、及び移載プッシャー59が送出方向に進退する。
【0021】
容器押出手段45は、図3,6に示すように、鉛直シュート47の内側を落下する容器5をローラーコンベヤ7の後方で受け止める底受部材49と、供給プッシャー111を送出方向に進退させる送出駆動手段38とを備える。容器5は、ベルトコンベヤ等により鉛直シュート47の近傍まで搬送され、プッシャー等により適時に鉛直シュート47に押し込まれる。鉛直シュート47は、その内側に設けたガイドレール40に従わせて容器5を底受部材49まで案内する。
【0022】
底受部材49は、送出方向に延びるスリット42を形成した鋼板である。送出駆動手段38は、そのシリンダーケース44に供給される空気圧に基づき、シリンダーケース44に係合したスライダー46を動作させるロッドレスエアシリンダーである。シリンダーケース44は鉛直シュート47に固定され、スライダー46は、スリット42に挿通された連結部材48を介して供給プッシャー111に連結している。
【0023】
図5,7に示すように、主秤量手段19は、支持手段11,13を支持する一対の支持フレーム83をベース板87に移動手段4を介して取付け、容器3、又は容器5から一対の支持フレーム83の受ける荷重をベース板87の底部89に設けた歪みゲージにより計測するものである。支持手段11は、水平方向に延びる一対の案内レールである。支持手段13は、一対の支持フレーム83の間で水平方向に広がる平滑な案内板である。
【0024】
移動手段4は、ベース板87の上面に固定したブラケット6にガイドレール91を架設し、支持フレーム83の脚部8に設けたスライダー93をガイドレール91に係合したものである。図に表れていない駆動源がスライダー93と共に一対の支持フレーム83をベース板87に対して矢印Xの向き、又はその反対向きに移動させるようにしても良い。これにより、支持手段11,13に支持される容器3,5の位置を主投下コンベヤ17の大出し口15の真下になるよう調整することができる。
【0025】
図1,2に示すように移載コンベヤ21に対して矢印Yの向きの前方に、搬出コンベヤ95が設置されている。搬出コンベヤ95は、容器3,5を適所へ搬出できるベルトコンベヤであれば良い。図8に示すように、移載コンベヤ21は、コンベヤフレーム97に軸受けされた複数のローラー99と、ローラー99を矢印βの向きに回転させる駆動源と、コンベヤフレーム97に取付けた駆動源101により昇降するストッパー103とを備える。
【0026】
導出昇降手段29は、ピストンロッド105をコンベヤフレーム97の底部109に連結したエアシリンダーである。副秤量手段27は、容器3、又は容器5からコンベヤフレーム97の受ける荷重を、コンベヤフレーム97の底部109に設けた歪みゲージにより計測するものである。
【0027】
次に導入送出装置1が容器3,5に内容物mを投入する動作を説明する。図面は特に断らない限り、図1〜図3を参照する。以下の動作は、駆動源がオペレータの指令、センサ類からの電気信号、又は個々の駆動源の制御を担うCPUがアクセスできる記憶媒体に書き込まれたプログラムに基づいて成されるものとする。また、文頭に付した英文字は動作の工程を区分する指標である。
【0028】
A:図4に示す昇降駆動手段55がピストンロッド57を上昇させることにより、移載プッシャー59の爪部69をローラーコンベヤ7のローラー53の上方へ突出させる。進退駆動手段63が移載プッシャー59を図5に実線で表した位置まで後退させる。
【0029】
B:導入昇降手段9がピストンロッド71を下降させることにより、ローラーコンベヤ7のローラー53を実線で表した位置に下降させる。この状態で、図4に示す容器搬送手段43が空の容器3をローラーコンベヤ7に供給する。即ち、容器搬送手段43が容器3を矢印Xの向きに搬送し、容器3の端部をローラーコンベヤ7のローラー53に乗り上げさせる。これと同時に、ローラーコンベヤ7がローラー53を駆動させ、容器3をローラー53の回転力で矢印Xの向きに牽引する。これにより、容器3の全体がローラー53に受け止められたところで、ローラー53を停止させる。
【0030】
C:容器押出手段45の供給プッシャー111は、本工程で鉛直シュート47よりも更に矢印Yの反対向きに後退している。導入昇降手段9がピストンロッド71を上昇させ、ローラーコンベヤ7のコンベヤフレーム51に軸受けされたローラーを図5に仮想線53'で表した高さまで上昇させる。これにより、昇降駆動手段55、移載プッシャー59、及び進退駆動手段63がコンベヤフレーム51と共に上昇する。
【0031】
D:進退駆動手段63が移載プッシャーを図5に示す仮想線59"の位置まで前進させる。これにより容器3がローラーコンベヤ7から矢印Yの向きに送り出され、図7に示すように支持手段11に乗り移る。続いて、進退駆動手段63が移載プッシャー59を矢印Yの反対向きに後退させる。
【0032】
E:主投下コンベヤ17のベルトコンベヤ35,37が起動する。これにより大出し口15から内容物mが投下され、支持手段11に支持された容器3の荷重に内容物mの荷重が加算される。この加算された荷重に基づき、主秤量手段19は大出し口15から容器3に投下された内容物mを秤量する。容器3に収納されるべき内容物mの総重量は予め定められており、大出し口15から投下された内容物mの荷重が上記の総重量に達する直前に、ベルトコンベヤ35,37が停止し、内容物mの投下が断たれる。
【0033】
F:図8に示す導出昇降手段29がピストンロッド105を上昇させることにより、移載コンベヤ21のローラーを仮想線99'で表した高さまで上昇させ、移載コンベヤ21の駆動源101がストッパー103をローラー99の上方まで上昇させる。
【0034】
G:上記E工程が行われている間に、以上に述べた容器3に後続する新たな空の容器3を容器搬送手段43がローラーコンベヤ7に供給する。この後続の容器3を対象として導入送出装置1が上記C,Dの工程を繰り返し、後続の容器3を移載プッシャー59によりローラーコンベヤ7から支持手段11に乗り移らせる。この過程で、後続の容器3が上記の総重量に達する直前の量の内容物mを既に投入された先行の容器3に突き当たるので、この先行の容器3は、支持手段11から図8に仮想線99'で表した移載コンベヤ21のローラーに乗り移り、容器3がストッパー103に突き当たる。容器3はストッパー103により移載コンベヤ21に位置決めさせる。
【0035】
H:副投下コンベヤ25のベルトコンベヤ39、及びローラーコンベヤ41が起動する。これにより小出し口23から内容物mが移載コンベヤ21に支持された容器3に投下され、容器3の荷重に内容物mの荷重が加算される。この加算された荷重に基づき、副秤量手段27は小出し口23から容器3に投下された内容物mを秤量する。上記Eの工程で主投下コンベヤ17の大出し口15から投下された内容物mの荷重、及び本工程で小出し口23から投下された内容物mの荷重の総計が上記の総重量に達した時点で、ベルトコンベヤ39、及びローラーコンベヤ41が停止し、内容物mの投下が断たれる。
【0036】
I:図5に示す導入昇降手段9がピストンロッド71を下降させることにより、ローラーコンベヤ7のローラー53を実線で表した高さまで降下させる。
【0037】
J:図8に示す導出昇降手段29がピストンロッド105を下降させることにより、移載コンベヤ21のローラー99を実線で表した位置まで下降させる。駆動源101がストッパー103をローラー99の下方まで下降させる。
【0038】
K:移載コンベヤ21が容器3を搬出コンベヤ95へ搬出する。即ち、移載コンベヤ21がローラー99を回転させることにより容器3を矢印Yの向きに搬送し、容器3の端部を搬出コンベヤ95に乗り上げさせる。これと同時に搬出コンベヤ95が起動し、容器3の全体が搬出コンベヤ95へ送り出される。
【0039】
導入送出装置1は上記B〜Kの工程を再度行っても良い。この場合、昇降駆動手段55が移載プッシャー59の爪部69をローラー53の上方へ突出させた状態を維持するので、上記Dの工程で進退駆動手段63が移載プッシャー59を後退させた時点で、上記Aの工程が完了する。或いは、上記Dの工程で進退駆動手段63が移載プッシャー59を前進させる直前に、昇降駆動手段55が移載プッシャー59の爪部69をローラー53の上方へ突出させ、上記Dの工程で進退駆動手段63が移載プッシャー59を後退させると同時、又はその直後に移載プッシャー59の爪部69をローラー53の間に没入させても良い。
【0040】
図3に示す容器搬送手段32は、図に表れていない容器を矢印Xの反対向きに搬送する点を除き、容器搬送手段43と同様のローラーコンベヤである。容器搬送手段43を停止させ、上記Bの工程で容器搬送手段32が空の容器をローラーコンベヤ7に供給するようにしても良い。この場合、容器搬送手段32により矢印Xの反対向きに搬送される容器の端部がローラー53に乗り上げるのと同時に、ローラーコンベヤ7がローラー53を駆動させ、この容器をローラー53の回転力で矢印Xの反対向きに牽引する。これにより容器の全体がローラー53に受け止められたところでローラー53を停止させる。ここで述べた容器は、上記C〜Kの工程で導入送出装置1の動作する対象として、容器3と同様に内容物mが投下され、最後に搬出コンベヤ95へ送り出される。
【0041】
導入送出装置1は更に以下の工程を行っても良い。この場合、容器搬送手段43による容器3の供給を停止し、容器押出手段45を始動させる。
【0042】
L:図4に示す昇降駆動手段55がピストンロッド57を下降させることにより、移載プッシャー59の爪部69をローラーコンベヤ7のローラー53の間に没入させる。
【0043】
M:図3,6に示す容器押出手段45の送出駆動手段38が供給プッシャー111を鉛直シュート47よりも更に矢印Yの反対向きに後退させる。この状態で、鉛直シュート47から落下する空の容器5が底受部材49に受け止められる。容器押出手段45は、底受部材49に受け止められた容器5をローラーコンベヤ7に供給する。即ち、送出駆動手段38が供給プッシャー111を矢印Yの向きに前進させることにより、容器5を供給プッシャー111に従わせて底受部材49から押し出し、容器5の全体をローラーコンベヤ7のローラー53に受け止めさせる。続いて、送出駆動手段38が供給プッシャー111を鉛直シュート47よりも更に矢印Yの反対向きに再び後退させる。
【0044】
N:図4に示す昇降駆動手段55がピストンロッド57を上昇させることにより、移載プッシャー59をローラー53の上方へ突出させる。更に進退駆動手段63が移載プッシャー59を前進させる。これにより、容器5がローラーコンベヤ7から矢印Yの向きに送り出され、図7に示すように支持手段13に乗り移る。続いて、昇降駆動手段55が移載プッシャー59をローラー53の間に没入させ、進退駆動手段63が移載プッシャー59を矢印Yの反対向きに後退させる。上記Iの工程で導入昇降手段9はローラーコンベヤ7のローラー53を既に降下させている。
【0045】
O:図7に示す主投下コンベヤ17の大出し口15から内容物mが支持手段13に支持された容器5に投下される。主秤量手段19が内容物mの荷重を秤量し、その荷重が予め定められた総重量に達する直前にベルトコンベヤ35,37が停止する点は、上記Eの工程と同様である。
【0046】
P:上記Jの工程で導出昇降手段29が移載コンベヤ21のローラー99を下降させている。この状態で、駆動源101がストッパー103をローラー99の上方まで上昇させる。
【0047】
Q:上記Oの工程が行われている間に、以上に述べた容器5に後続する新たな空の容器5を容器押出手段45がローラーコンベヤ7に供給する。この後続の容器5を移載プッシャー59によりローラーコンベヤ7から支持手段13に乗り移らせる過程で、後続の容器5が既に支持手段13に支持された先行の容器5に突き当たるので、この先行の容器5が支持手段13から図8に実線で表した移載コンベヤ21のローラー99に乗り移り、ストッパー103に突き当たる。容器5はストッパー103により移載コンベヤ21に位置決めさせる。
【0048】
R:副投下コンベヤ25の小出し口23から内容物mが支持手段13に支持された容器5に投下される。これ以外は上記Hの工程と同様である。続いて、駆動源101がストッパー103をローラー99の下方まで下降させ、移載コンベヤ21から容器5が搬出コンベヤ95へ送り出される。
【0049】
導入送出装置1は上記A〜Kの工程を再度行っても良い。或いは、導入送出装置1は更に上記M〜Rの工程を再度行っても良い。この場合、移載プッシャー59の爪部69が上記Nの工程でローラーコンベヤ7のローラー53の間に没入された時点で、上記Lの工程が完了する。
【0050】
以上に述べた導入送出装置1によれば、容器3,5、又は容器搬送手段32により搬送される容器がそれぞれローラーコンベヤ7に供給される向きに関わりなく、これらの容器から選択される容器をローラーコンベヤ7のローラー53に支持させることができる。更に、ローラー53に支持された容器を移載プッシャー59の前進する動作に従わせてローラーコンベヤ7から送り出し、支持手段11、又は支持手段13に乗り移らせることができる。このように、導入送出装置1によれば、以上に述べた何れかの容器を支持手段11,13に支持されるよう搬入するのが容易であり、この容器に投下される内容物mを主秤量手段19、又は副秤量手段27によって秤量することができる。
【0051】
しかも、容器押出手段45から容器5がローラーコンベヤ7に供給されるとき、昇降駆動手段55が移載プッシャー59をローラーコンベヤ7のローラー53の間に没入させるので、底受部材49から矢印Yの向きにローラーコンベヤ7へ押し出される容器5の行程が移載プッシャー59によって遮られることはない。このため、導入送出装置1によれば、容器3がローラーコンベヤ7に供給された後直に、容器5をローラーコンベヤ7に迅速に供給することができる。
【0052】
また、容器搬送手段32から容器がローラーコンベヤ7に供給されるとき、又は容器搬送手段43から容器3がローラーコンベヤ7に供給されるとき、進退駆動手段63が移載プッシャー59を図5に実線で表した位置まで後退させる。この状態で、昇降駆動手段55が移載プッシャー59をローラー53の間に没入させなくても、容器搬送手段32,42からローラーコンベヤ7に供給される容器の行程が移載プッシャー59によって遮られることはない。このため、導入送出装置1によれば、容器5がローラーコンベヤ7に供給された直後に、容器3をローラーコンベヤ7に迅速に供給することができる。
【0053】
尚、本発明は、その趣旨を逸脱しない範囲で当業者の知識に基づき種々なる改良、修正、又は変形を加えた態様でも実施できる。鉛直シュート47、及び搬出コンベヤ95は本発明の必須の要素に必須ではない。容器押出手段45は、容器5を矢印Yの向きに案内できるように下降傾斜したシュートであっても良い。支持手段11,13は容器3,5を支持するローラーであっても良い。
【0054】
以上に述べた容器が全て同種であっても良い。例えば容器5、及び容器搬送手段32からローラーコンベヤ7に供給される容器が、容器3と同種であっても良い。この場合、導入送出装置1が容器3のみを対象に動作できれば良いので、支持手段13を省略することができる。そして、図4に示す容器供給手段7のローラーを仮想線53'の高さに設置し、図8に示す移載コンベヤ21のローラーを仮想線99'の高さに設置しておけば、導入昇降手段9、及び導出昇降手段29は不要である。
【産業上の利用可能性】
【0055】
本発明は、青果物等に限らず、あらゆる物品を箱詰めし秤量するのに有益な技術である。
【符号の説明】
【0056】
1...導入送出装置、3,5...容器、7...ローラーコンベヤ、9...導入昇降手段、11,13...支持手段、15...大出し口、17...主投下コンベヤ、19...主秤量手段、21...移載コンベヤ、23...小出し口、25...副投下コンベヤ、27...副秤量手段、29...導出昇降手段、31...側壁部、33...底面、35,37,39...ベルトコンベヤ、41...ローラーコンベヤ、43...容器搬送手段、45...容器押出手段、47...鉛直シュート、49...底受部材、51,97...コンベヤフレーム、53,99...ローラー、55...昇降駆動手段、57,71,105...ピストンロッド、59...移載プッシャー、61...連結部材、63...進退駆動手段、77...シリンダーケース、67,75,91...ガイドレール、69...爪部、79,93...スライダー、81...保持部材、83...支持フレーム、87...ベース板、89,109...底部、95...搬出コンベヤ、101...駆動源、103...ストッパー、111...供給プッシャー。
【0057】
m...内容物、4...移動手段、6...ブラケット、8...脚部、28...折り目線、32...容器搬送手段、34...ローラー、36...コンベヤフレーム、38...送出駆動手段、40...ガイドレール、42...スリット、44...シリンダーケース、46...スライダー、48...連結部材。
【特許請求の範囲】
【請求項1】
容器を搬送する容器搬送手段と、
相互に水平方向に間隔を空けて容器を支持する複数のローラーを並列し、前記ローラーを回転させることにより容器を搬送するローラーコンベヤと、
前記複数のローラーの間を通過できる移載プッシャーを前記ローラーコンベヤによる容器の搬送方向に直交する送出方向に前進、又は後退させる進退駆動手段と、
前記移載プッシャーを前記ローラーコンベヤのローラーの間に没入させ、又は前記ローラーの上方へ突出するよう昇降させる昇降駆動手段と、
前記移載プッシャーの後退する向きの後方に設けた底受部材で容器を受け止め、前記送出方向に進退する供給プッシャーにより、前記底受部材の受け止めた容器を前記ローラーコンベヤに押し出す容器押出手段とを備え、
前記容器搬送手段により搬送される容器を前記ローラーコンベヤのローラーで支持し、前記昇降駆動手段が前記移載プッシャーを上昇させ、前記進退駆動手段が前記移載プッシャーを前進させる動作に従わせ、前記ローラーで支持された容器を前記ローラーコンベヤから送り出し、
前記昇降駆動手段が前記移載プッシャーを下降させ、前記容器押出手段の底受部材から押し出される容器を前記ローラーコンベヤのローラーで支持し、前記昇降駆動手段が前記移載プッシャーを上昇させ、前記進退駆動手段が前記移載プッシャーを前進させる動作に従わせ、前記ローラーで支持された容器を前記ローラーコンベヤから送り出すことを特徴とする導入送出装置。
【請求項2】
2つの前記容器搬送手段が前記ローラーコンベヤに対して、その搬送方向の両側に配置されたことを特徴とする請求項1に記載の導入送出装置。
【請求項1】
容器を搬送する容器搬送手段と、
相互に水平方向に間隔を空けて容器を支持する複数のローラーを並列し、前記ローラーを回転させることにより容器を搬送するローラーコンベヤと、
前記複数のローラーの間を通過できる移載プッシャーを前記ローラーコンベヤによる容器の搬送方向に直交する送出方向に前進、又は後退させる進退駆動手段と、
前記移載プッシャーを前記ローラーコンベヤのローラーの間に没入させ、又は前記ローラーの上方へ突出するよう昇降させる昇降駆動手段と、
前記移載プッシャーの後退する向きの後方に設けた底受部材で容器を受け止め、前記送出方向に進退する供給プッシャーにより、前記底受部材の受け止めた容器を前記ローラーコンベヤに押し出す容器押出手段とを備え、
前記容器搬送手段により搬送される容器を前記ローラーコンベヤのローラーで支持し、前記昇降駆動手段が前記移載プッシャーを上昇させ、前記進退駆動手段が前記移載プッシャーを前進させる動作に従わせ、前記ローラーで支持された容器を前記ローラーコンベヤから送り出し、
前記昇降駆動手段が前記移載プッシャーを下降させ、前記容器押出手段の底受部材から押し出される容器を前記ローラーコンベヤのローラーで支持し、前記昇降駆動手段が前記移載プッシャーを上昇させ、前記進退駆動手段が前記移載プッシャーを前進させる動作に従わせ、前記ローラーで支持された容器を前記ローラーコンベヤから送り出すことを特徴とする導入送出装置。
【請求項2】
2つの前記容器搬送手段が前記ローラーコンベヤに対して、その搬送方向の両側に配置されたことを特徴とする請求項1に記載の導入送出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−121698(P2012−121698A)
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願番号】特願2010−274221(P2010−274221)
【出願日】平成22年12月9日(2010.12.9)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願日】平成22年12月9日(2010.12.9)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
[ Back to top ]