
小型多自由度の力覚提示マニピュレータ
【課題】高品質な力覚提示性能を有し、小型であり、かつ広い作業領域を有する力覚提示マニピュレータを提供する。
【解決手段】力覚提示マニピュレータは、マニピュレータのベースと、エンドエフェクタと、駆動手段と、駆動手段の動力をエンドエフェクタの並進3自由度動作に変換するパラレルリンク機構と、を備える。エンドエフェクタは、パラレルリンク機構の機械的拘束により、空間位置に依らず姿勢を維持する。本発明によれば、力覚提示装置にパラレルリンク機構を用いることにより、高剛性、高出力、高バックドライバビリティ、低慣性を実現可能なため、高品質な力覚提示が可能である。また、本発明のパラレルリンク機構は、機構と駆動手段が一側方へ配置可能であるため、2つのパラレルリンク機構をジンバル機構で連結した、小型な回転自由度を有する多自由度力覚提示マニピュレータが実現可能である。
【解決手段】力覚提示マニピュレータは、マニピュレータのベースと、エンドエフェクタと、駆動手段と、駆動手段の動力をエンドエフェクタの並進3自由度動作に変換するパラレルリンク機構と、を備える。エンドエフェクタは、パラレルリンク機構の機械的拘束により、空間位置に依らず姿勢を維持する。本発明によれば、力覚提示装置にパラレルリンク機構を用いることにより、高剛性、高出力、高バックドライバビリティ、低慣性を実現可能なため、高品質な力覚提示が可能である。また、本発明のパラレルリンク機構は、機構と駆動手段が一側方へ配置可能であるため、2つのパラレルリンク機構をジンバル機構で連結した、小型な回転自由度を有する多自由度力覚提示マニピュレータが実現可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、小型多自由度の力覚提示マニピュレータに関するものである。
【背景技術】
【0002】
バーチャル・リアリティを用いた訓練システムにおいて臨場感を高めるためには力覚の提示が重要である。また、ロボットの遠隔操作においても微細作業や、繊細で複雑な作業を必要とする場合には、作業ロボットから操縦桿へ力覚の帰還を行うことで作業効率を向上することが知られている。このように力覚を表現する装置として力覚提示装置が用いられる。
【0003】
本発明では、力覚提示装置にパラレルリンク機構を応用してマニピュレータを構成している。ここで、「パラレルリンク機構」とは、マニピュレータのベースと、エンドエフェクタとを、複数のリンク機構により支持する機構の呼称である。従来のパラレルリンク機構を用いた力覚提示装置には特許文献1、特許文献2、特許文献3、特許文献4、非特許文献1、非特許文献2、非特許文献3、及び、非特許文献4のようなものが知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−148382
【特許文献2】特開2001−293676
【特許文献3】特開2010−099403
【特許文献4】特開2010−146307
【非特許文献】
【0005】
【非特許文献1】Jumpei Arata, Hiroyuki Kondo, Norio Ikedo, Hideo Fujimoto, 「Haptic Device using a newly developed Redundant Parallel Mechanism」 IEEE Trans. on Robotics, Vol.27(2), pp.201-214, 2011.
【非特許文献2】Clavel R. , “Conception d’un robot parallele rapide a 4 degres de liberte”, Ph.D. Thesis, EPFL, Lausanne,1991,No925
【非特許文献3】岩田洋夫、外2名、「フォースディスプレイを用いた仮想環境における手術シミュレーションの要素技術開発」、日本VR学会第1回大会論文集、pp.95−98,1996
【非特許文献4】Y. Tsumaki, H. Naruse, D. N. Nenchev and M. Uchiyama,"Design of a Compact 6-DOF Haptic Interface", Proceedings of the 1998 IEEE International Conference on Robotics and Automation, Leuven, Belgium, 1998, 2580-2585
【発明の概要】
【発明が解決しようとする課題】
【0006】
力覚提示マニピュレータの機構において求められる要件に、高品質な力覚提示性能を有すること、小型でありながら広い作業領域を有すること、が挙げられる。高品質な力覚提示性能を有するためには、高剛性、高出力、高バックドライバビリティ、低慣性を実現する機構であることが望ましい。以上の性能を実現するためにはパラレルリンク機構を用いることが有効な手段であるが、一般に従来のパラレルリンク機構は小型でありながら広い作業領域を確保することは、難しい。
【0007】
力覚提示マニュピレータの作業領域が小さい場合、操作者の自由な操作や、操作対象への動作指令が、力覚提示マニピュレータの作業領域に制限される可能性があるため、望ましくない。
【0008】
本発明は、上記に鑑みてなされたものであって、その目的とするところは、高品質な力覚提示性能を有し、小型であり、かつ広い作業領域を有する力覚提示マニピュレータを提供することにある。
【課題を解決するための手段】
【0009】
本発明は、駆動手段によって駆動される多自由度の力覚提示マニピュレータであり、パラレルリンク機構により、直交する3軸(X軸、Y軸、Z軸)を有する基準座標系に固定したマニピュレータのベースに対して、エンドエフェクタが、X軸方向の並進運動、Y軸方向の並進運動、Z軸方向の並進運動、の3自由度を有し、駆動手段の動力が、リンク機構によって、X軸方向の並進、Y軸方向の並進、Z軸方向の並進、の各運動に変換されることを特徴とする。
【0010】
ここで、パラレルリンク機構は、第1アームと、第2アームと、エンドエフェクタと、から構成されている。さらに第1アームは、第1平行四節リンク機構と、第2平行四節リンク機構と、第1駆動手段と、第2駆動手段と、から構成され、第2アームは、第1単独リンクと、第3平行四節リンク機構と、第3駆動手段と、から構成されている。
【0011】
具体的には、第1平行四節リンク機構は、ベースに備えた第1軸を回転軸とする第1リンクと、第1軸を回転軸とする第2リンクと、第2リンクに備えた第1軸と平行な第2軸に回転自在に連結する第3リンクと、第1リンクおよび前記第3リンクのそれぞれに備えた第1軸と平行な第3軸および第4軸に回転自在で連結する第4リンクから構成されている。第1リンクに第1軸まわりの回転運動を与える第1駆動手段と、第2リンクに第2軸まわりの回転運動を与える第2駆動手段と、が連結され、第1、第2、第3、第4リンクは平行四辺形をなしている。
【0012】
第2平行四節リンク機構は、一対の第5軸を備える第5リンクと、第6軸および第6軸に直交する一対の第7軸を備える第6リンクと、第5、第6リンクを第5、第7軸で回転自在に連結する一対の第7リンクから構成されている。第5、第6、第7リンクは平行四辺形をなしており、第2平行四節リンク機構の第5軸が第1平行四節リンク機構の第3軸と直交するよう第5リンクが第4リンクに固定されている。
【0013】
第1単独リンクは、前記ベースに備えた第1単独リンク軸を回転軸とし、第1単独軸と平行な第2単独リンク軸を備えている。第1単独リンク軸は、第3駆動手段と連結され、回転運動を与えられる。
【0014】
第3平行四節リンク機構は、一対の第8軸を備える第8リンクと、第9軸および第9軸に直交する一対の第10軸を備える第9リンクと、第8、第9リンクを第8、第10軸で回転自在に連結する一対の第10リンクから構成されている。第8、第9、第10リンクは平行四辺形をなしており、第3平行四節リンク機構の第8軸が単独リンクの前記第2単独リンク軸と直交するように回転自在に連結されている。
【0015】
エンドエフェクタは第1アームと第2アームの末端部である第6軸と第9軸と回転自在で連結されている。
【0016】
本発明は、駆動手段によって駆動されるパラレルリンク機構を用いた力覚提示マニピュレータを対象とし、3自由度の並進動作を出力する力覚提示マニピュレータを対象とする。本発明の駆動手段には、回転運動を出力する出力軸を具備する駆動装置、例えばモータを用いることができる。
【0017】
本発明である2つのパラレルリンク機構をジンバル機構により連結して用いることで、X軸方向の並進運動、Y軸方向の並進運動、Z軸方向の並進運動、X軸方向に平行な軸についての回転運動、Y軸方向に平行な軸についての回転運動の少なくとも5自由度を有する、回転自由度を有する力覚提示マニピュレータを提供することができる。
【0018】
回転自由度を有する多自由度の力覚提示マニピュレータは、一対のパラレルリンク機構と、一対のパラレルリンク機構のそれぞれのエンドエフェクタを連結する一対の回転2軸を有するジンバル機構と、多自由度エンドエフェクタと、から構成される。
【0019】
一対のジンバル機構のそれぞれは、一対のパラレルリンク機構のエンドエフェクタに備えた第1ジンバル軸と、回転自在に連結する第1ジンバル軸と直交する第2ジンバル軸を備える第11リンクと、第11リンクと第2ジンバル軸と回転自在で連結する第12リンクと、から構成されている。一対のジンバル機構のそれぞれの第12リンクは、第11軸を備える多自由度エンドエフェクタに、それぞれの第1、第2ジンバル軸の交点であるジンバル回転中心を第11軸が通るように回転自在に連結される。
【発明の効果】
【0020】
本発明によれば、力覚提示装置にパラレルリンク機構を用いることにより、高剛性、高出力、高バックドライバビリティ、低慣性を実現可能なため、高品質な力覚提示が可能である。また、本発明の構成要素であるパラレルリンク機構は、従来機構と異なり、機構の一側へ機構本体および駆動手段を配置できるため、従来のパラレルリンク機構と比較して広い作業領域を得ることが可能である。また、冗長自由度を有していないため、製作コスト面においても従来機構と比して不利はない。さらに、機構の一側へ機構本体および駆動手段を配置できる特徴により、2つのパラレルリンク機構を連結して配置することで、小型でありながら、広い動作域を有し、回転自由度を有する多自由度の力覚提示マニピュレータを提供できる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態に係る力覚提示マニピュレータのシステムを示す図である。
【図2】本発明の一実施形態に係る力覚提示マニピュレータの斜視図である。
【図3】本発明の一実施形態に係る力覚提示マニピュレータを構成する一対のパラレルリンク機構20の機構モデル図である。
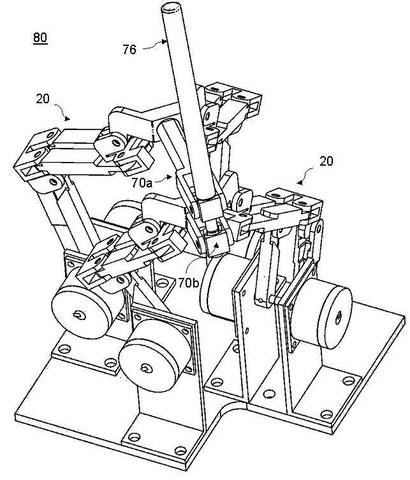
【図4】本発明の一実施形態に係る回転自由度を有する力覚提示マニピュレータの斜視図である。
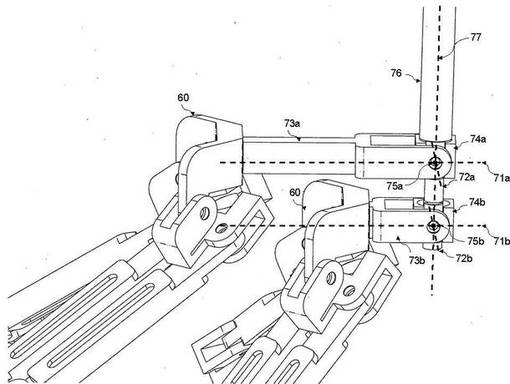
【図5】本発明の一実施形態に係る回転自由度を有する力覚提示マニピュレータを構成する一対のジンバル機構70の機構モデル図である。
【発明を実施するための形態】
【0022】
まず、本発明の力覚提示マニピュレータは、エンドエフェクタがマニピュレータのベースに対して、3自由度の並進動作の回転動作を出力する。
【0023】
以下、図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0024】
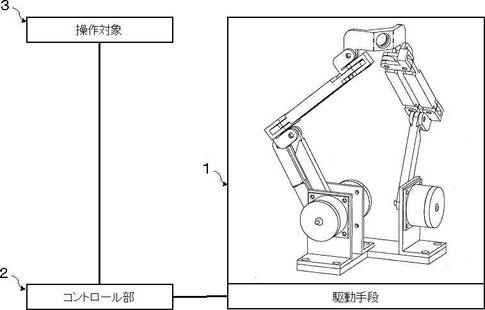
図1は、本発明の一実施形態に係わる力覚提示マニピュレータを用いた、力覚提示システムを示している。
【0025】
本発明は、力覚提示マニピュレータであるマニピュレータ1と、マニピュレータ1の駆動手段を制御するコントロール部2と、力覚が取得できるロボット、若しくは、バーチャル・システム等からなる操作対象3から構成される。このシステムは、遠隔操作ロボットの力覚フィードバック付操縦桿、バーチャル・リアリティを用いた訓練システムの力覚提示装置等に用いられる。
【0026】
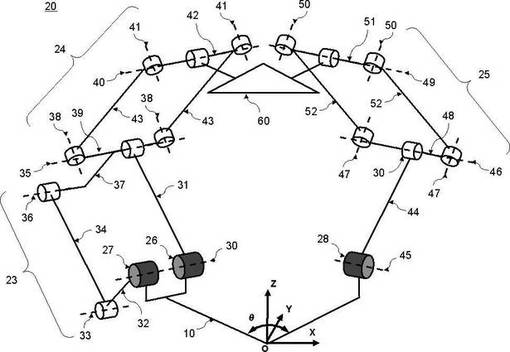
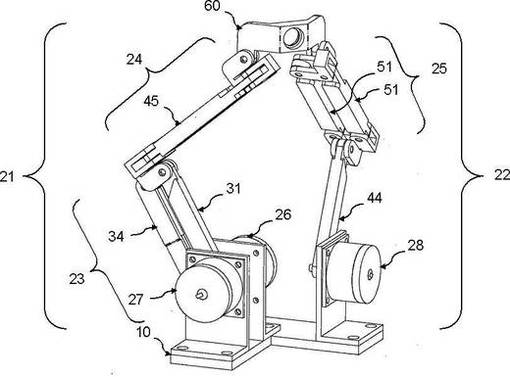
次に、図2から図3を参照して、マニピュレータ1の構成について詳しく説明する。図2は本実施形態における機構モデルの斜視図、図3は本実施形態の斜視図である。
【0027】
マニピュレータ1は、パラレルリンク機構20により構成される。パラレルリンク機構20は、ベース10と、駆動手段26、27、28と、各駆動部に連結し、駆動手段の動力をエンドエフェクタの3自由度並進動作に変換する第1アーム21、第2アーム22により構成される。
【0028】
第1アーム21は、第1平行4節リンク23と、第2平行4節リンク24と、第1駆動手段26と、第2駆動手段27と、から構成される。
【0029】
第1平行4節リンク機構23は、第1リンク31、第2リンク32、第3リンク34、第4リンク37から構成され、それぞれのリンクは第1軸30、第2軸33、第3軸35、第4軸36により接続されている。これらの軸は回転自在に連結される。
【0030】
第1平行4節リンク機構23の第1リンク31と第2リンク32は、第1駆動手段26と第2駆動手段27に接続される。力覚提示マニピュレータに使用する動力伝達手段には、正確な動力伝達を必要とするため、動力伝達手段における摩擦やガタ等による伝達損失を極力抑える必要がある。
【0031】
第2平行四節リンク機構24は、第5リンク39、第6リンク42、2本の第7リンク43から構成されており、それぞれ第5軸38、第7軸41により接続されている。これらの軸は回転自在に連結される。第2平行四節リンク機構24は、第5リンク39が第1平行四節リンク機構23の第3軸35と固定されている必要がある。
【0032】
第2アーム22は、第1単独リンク44と、第3平行4節リンク機構25と、第3駆動手段28と、から構成される。
【0033】
第1単独リンク44は、第1単独リンク軸45により、第3駆動手段28に接続される。力覚提示マニピュレータに使用する動力伝達手段には、正確な動力伝達を必要とするため、動力伝達手段における摩擦やガタ等による伝達損失を極力抑える必要がある。
【0034】
第3平行四節リンク機構25は、第8リンク48、第9リンク51、2本の第10リンク52から構成されており、それぞれ第8軸47、第10軸50により接続されている。これらの軸は回転自在に連結される。第3平行四節リンク機構25は、第8リンク48が第1単独リンク44の回転対偶である第2単独リンク軸46と固定されている必要がある。
【0035】
第1アーム21と第2アーム22のそれぞれ末端部である第6軸40と、第9軸49より、エンドエフェクタ60へそれぞれ回転自在で連結する。このときのエンドエフェクタ60への接続角度は、アームの設置角度θと同じであることが望ましい。なお、第1アーム21と第2アーム22は、広い動作域と良好な力覚提示機能のため、同一円周上に90度等配であることが望ましく、よってθを90度とすることが望ましい。
【0036】
このようにパラレルリンク機構20を構成することにより、エンドエフェクタ60は並進方向への動作拘束を有し、結果として並進移動をベース10に固定した駆動手段により可能とする。このときの運動学は簡便に幾何学的に与えられる。
【0037】
次に、マニピュレータ1の駆動手段を制御するコントロール部2と、マニピュレータ1によって操作する操作対象3について説明する。
【0038】
コントロール部2は、例えばモータドライバや制御コンピュータから構成される。コンピュータは、例えばエンコーダなどのセンサから力覚提示マニピュレータの動作を演算し、位置指令として操作対象3へ情報を出力する。また、操作対象3から入力された力情報からモータドライバの制御信号を生成し、モータドライバに出力する。モータドライバは入力された制御信号に基づき駆動手段を駆動する。各駆動手段からの動力はパラレルリンク機構20によってエンドエフェクタ60まで伝達され、エンドエフェクタ60は所望の力を提示する。
【0039】
操作対象3は、例えば力情報が取得可能な遠隔ロボットで構成される。コントロール部2からの入力情報により遠隔ロボットは駆動され、環境から得た力情報をコントロール部2に出力する。
【0040】
以上に述べた構成によれば、エンドエフェクタ60において姿勢の変化しない、並進3自由度の力覚提示が可能な力覚提示システムを実現することができる。本発明のパラレルリンク機構20は、駆動手段を装置片側へまとめて配置可能であるため、機構の大きさに対して比較的大きな作業領域が得られる。
【0041】
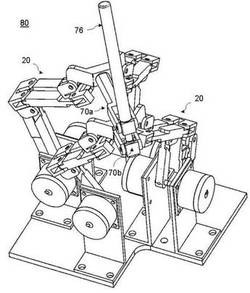
本発明のパラレルリンク機構20は、回転自由度を有する多自由度力覚提示マニピュレータ80へ応用可能である。図4から図5を参照して、回転自由度を有する多自由度力覚提示マニピュレータ80の構成について詳しく説明する。図4はこの実施形態の斜視図、図5は一対のジンバル機構70周辺部の斜視図である。
【0042】
一対のパラレルリンク機構20の末端部であるエンドエフェクタ60に連結される一対のジンバル機構70a、70bは、それぞれエンドエフェクタ60と、エンドエフェクタ60に備えた第1ジンバル軸71a、71bと、回転自在に連結する第1ジンバル軸71a、71bとそれぞれ直交する第2ジンバル軸72a、72bを備える第11リンク73a、73bと、第11リンク73a、73bと第2ジンバル軸72a、72bと回転自在に連結する第12リンク74a、74bと、から構成されている。一対のジンバル機構70a、70bのそれぞれは、第1ジンバル軸71a、71bと第2ジンバル軸72a、72bの交点(ジンバル回転中心75a、75b)まわりに回転2軸を有する。
【0043】
多自由度エンドエフェクタ76は、一対のジンバル機構70a、70bのジンバル回転中心75a、75bにより、異なる2点で支持されている。多自由度エンドエフェクタ76は、第11軸77を備え、一対のジンバル機構70a、70bのそれぞれの第12リンク74a、74bを第11軸77まわりに回転自在となるよう連結されている。この際、第11軸77がジンバル回転中心75を通るようにする。多自由度エンドエフェクタ76は、異なる2点を一対のジンバル機構70a、70bにより支持し、一対のジンバル機構70a、70bにパラレルリンク機構20から得られる3自由度の並進動作を与えて制御することにより、ベース10に対して3自由度の並進動作および2自由度の回転動作を得る。
【0044】
回転自由度を有する多自由度力覚提示マニピュレータ80を構成する一対のパラレルリンク機構20の配置として、機械的な干渉を避け、小型とするために、Y軸方向へ連続して配置することが望ましい。また、一対のパラレルリンク機構20の第1アーム21と第2アーム22の配置は、それぞれ鏡面対象とすることで、力覚提示機能の空間的偏りを平均化することが可能となるため、望ましい。
【0045】
次に、回転自由度を有する多自由度力覚提示マニピュレータの作動について説明する。操作者は多自由度エンドエフェクタ76を、ペンを持つように握る。多自由度エンドエフェクタ76はパラレルリンク機構20のベース10に対して3軸方向の平行移動および、2軸まわりの回転運動が可能であり、操作者が自由に動作させることが可能である。
【0046】
以上に述べた構成によれば、図1で述べた同様の構成により、マニピュレータ1として回転自由度を有する多自由度力覚提示マニピュレータを用い、操作者が操作することにより、操作対象3を自由に動作させることが可能であり、操作対象3に加えられた力をマニピュレータ1で実現し、操作者がその力を感じることが可能である。
【0047】
以上において、本発明を実施形態に則して説明したが、本発明は上記実施形態に制限されるものではなく、その趣旨を逸脱しない範囲で適宜変更して適用できることはいうまでもない。
【産業上の利用可能性】
【0048】
本発明の力覚提示マニピュレータは、遠隔操作ロボットの力覚フィードバック付操縦桿、バーチャル・リアリティを用いた訓練システムの力覚提示装置等に利用可能である。
【符号の説明】
【0049】
1 マニピュレータ
2 コントロール部
3 操作対象
10 ベース
20 パラレルリンク機構
21 第1アーム
22 第2アーム
23 第1平行四節リンク機構
24 第2平行四節リンク機構
25 第3平行四節リンク機構
26 第1駆動手段
27 第2駆動手段
28 第3駆動手段
30 第1軸
31 第1リンク
32 第2リンク
33 第2軸
34 第3リンク
35 第3軸
36 第4軸
37 第4リンク
38 第5軸
39 第5リンク
40 第6軸
41 第7軸
42 第6リンク
43 第7リンク
44 第1単独リンク
45 第1単独リンク軸
46 第2単独リンク軸
47 第8軸
48 第8リンク
49 第9軸
50 第10軸
51 第9リンク
52 第10リンク
60 エンドエフェクタ
70(70a、70b) ジンバル機構
71(71a、71b) 第1ジンバル軸
72(72a、72b) 第2ジンバル軸
73(73a、73b) 第11リンク
74(74a、74b) 第12リンク
75(75a、75b) ジンバル回転中心
76 多自由度エンドエフェクタ
77 第11軸
80 回転自由度を有する多自由度な力覚提示マニピュレータ
【技術分野】
【0001】
本発明は、小型多自由度の力覚提示マニピュレータに関するものである。
【背景技術】
【0002】
バーチャル・リアリティを用いた訓練システムにおいて臨場感を高めるためには力覚の提示が重要である。また、ロボットの遠隔操作においても微細作業や、繊細で複雑な作業を必要とする場合には、作業ロボットから操縦桿へ力覚の帰還を行うことで作業効率を向上することが知られている。このように力覚を表現する装置として力覚提示装置が用いられる。
【0003】
本発明では、力覚提示装置にパラレルリンク機構を応用してマニピュレータを構成している。ここで、「パラレルリンク機構」とは、マニピュレータのベースと、エンドエフェクタとを、複数のリンク機構により支持する機構の呼称である。従来のパラレルリンク機構を用いた力覚提示装置には特許文献1、特許文献2、特許文献3、特許文献4、非特許文献1、非特許文献2、非特許文献3、及び、非特許文献4のようなものが知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−148382
【特許文献2】特開2001−293676
【特許文献3】特開2010−099403
【特許文献4】特開2010−146307
【非特許文献】
【0005】
【非特許文献1】Jumpei Arata, Hiroyuki Kondo, Norio Ikedo, Hideo Fujimoto, 「Haptic Device using a newly developed Redundant Parallel Mechanism」 IEEE Trans. on Robotics, Vol.27(2), pp.201-214, 2011.
【非特許文献2】Clavel R. , “Conception d’un robot parallele rapide a 4 degres de liberte”, Ph.D. Thesis, EPFL, Lausanne,1991,No925
【非特許文献3】岩田洋夫、外2名、「フォースディスプレイを用いた仮想環境における手術シミュレーションの要素技術開発」、日本VR学会第1回大会論文集、pp.95−98,1996
【非特許文献4】Y. Tsumaki, H. Naruse, D. N. Nenchev and M. Uchiyama,"Design of a Compact 6-DOF Haptic Interface", Proceedings of the 1998 IEEE International Conference on Robotics and Automation, Leuven, Belgium, 1998, 2580-2585
【発明の概要】
【発明が解決しようとする課題】
【0006】
力覚提示マニピュレータの機構において求められる要件に、高品質な力覚提示性能を有すること、小型でありながら広い作業領域を有すること、が挙げられる。高品質な力覚提示性能を有するためには、高剛性、高出力、高バックドライバビリティ、低慣性を実現する機構であることが望ましい。以上の性能を実現するためにはパラレルリンク機構を用いることが有効な手段であるが、一般に従来のパラレルリンク機構は小型でありながら広い作業領域を確保することは、難しい。
【0007】
力覚提示マニュピレータの作業領域が小さい場合、操作者の自由な操作や、操作対象への動作指令が、力覚提示マニピュレータの作業領域に制限される可能性があるため、望ましくない。
【0008】
本発明は、上記に鑑みてなされたものであって、その目的とするところは、高品質な力覚提示性能を有し、小型であり、かつ広い作業領域を有する力覚提示マニピュレータを提供することにある。
【課題を解決するための手段】
【0009】
本発明は、駆動手段によって駆動される多自由度の力覚提示マニピュレータであり、パラレルリンク機構により、直交する3軸(X軸、Y軸、Z軸)を有する基準座標系に固定したマニピュレータのベースに対して、エンドエフェクタが、X軸方向の並進運動、Y軸方向の並進運動、Z軸方向の並進運動、の3自由度を有し、駆動手段の動力が、リンク機構によって、X軸方向の並進、Y軸方向の並進、Z軸方向の並進、の各運動に変換されることを特徴とする。
【0010】
ここで、パラレルリンク機構は、第1アームと、第2アームと、エンドエフェクタと、から構成されている。さらに第1アームは、第1平行四節リンク機構と、第2平行四節リンク機構と、第1駆動手段と、第2駆動手段と、から構成され、第2アームは、第1単独リンクと、第3平行四節リンク機構と、第3駆動手段と、から構成されている。
【0011】
具体的には、第1平行四節リンク機構は、ベースに備えた第1軸を回転軸とする第1リンクと、第1軸を回転軸とする第2リンクと、第2リンクに備えた第1軸と平行な第2軸に回転自在に連結する第3リンクと、第1リンクおよび前記第3リンクのそれぞれに備えた第1軸と平行な第3軸および第4軸に回転自在で連結する第4リンクから構成されている。第1リンクに第1軸まわりの回転運動を与える第1駆動手段と、第2リンクに第2軸まわりの回転運動を与える第2駆動手段と、が連結され、第1、第2、第3、第4リンクは平行四辺形をなしている。
【0012】
第2平行四節リンク機構は、一対の第5軸を備える第5リンクと、第6軸および第6軸に直交する一対の第7軸を備える第6リンクと、第5、第6リンクを第5、第7軸で回転自在に連結する一対の第7リンクから構成されている。第5、第6、第7リンクは平行四辺形をなしており、第2平行四節リンク機構の第5軸が第1平行四節リンク機構の第3軸と直交するよう第5リンクが第4リンクに固定されている。
【0013】
第1単独リンクは、前記ベースに備えた第1単独リンク軸を回転軸とし、第1単独軸と平行な第2単独リンク軸を備えている。第1単独リンク軸は、第3駆動手段と連結され、回転運動を与えられる。
【0014】
第3平行四節リンク機構は、一対の第8軸を備える第8リンクと、第9軸および第9軸に直交する一対の第10軸を備える第9リンクと、第8、第9リンクを第8、第10軸で回転自在に連結する一対の第10リンクから構成されている。第8、第9、第10リンクは平行四辺形をなしており、第3平行四節リンク機構の第8軸が単独リンクの前記第2単独リンク軸と直交するように回転自在に連結されている。
【0015】
エンドエフェクタは第1アームと第2アームの末端部である第6軸と第9軸と回転自在で連結されている。
【0016】
本発明は、駆動手段によって駆動されるパラレルリンク機構を用いた力覚提示マニピュレータを対象とし、3自由度の並進動作を出力する力覚提示マニピュレータを対象とする。本発明の駆動手段には、回転運動を出力する出力軸を具備する駆動装置、例えばモータを用いることができる。
【0017】
本発明である2つのパラレルリンク機構をジンバル機構により連結して用いることで、X軸方向の並進運動、Y軸方向の並進運動、Z軸方向の並進運動、X軸方向に平行な軸についての回転運動、Y軸方向に平行な軸についての回転運動の少なくとも5自由度を有する、回転自由度を有する力覚提示マニピュレータを提供することができる。
【0018】
回転自由度を有する多自由度の力覚提示マニピュレータは、一対のパラレルリンク機構と、一対のパラレルリンク機構のそれぞれのエンドエフェクタを連結する一対の回転2軸を有するジンバル機構と、多自由度エンドエフェクタと、から構成される。
【0019】
一対のジンバル機構のそれぞれは、一対のパラレルリンク機構のエンドエフェクタに備えた第1ジンバル軸と、回転自在に連結する第1ジンバル軸と直交する第2ジンバル軸を備える第11リンクと、第11リンクと第2ジンバル軸と回転自在で連結する第12リンクと、から構成されている。一対のジンバル機構のそれぞれの第12リンクは、第11軸を備える多自由度エンドエフェクタに、それぞれの第1、第2ジンバル軸の交点であるジンバル回転中心を第11軸が通るように回転自在に連結される。
【発明の効果】
【0020】
本発明によれば、力覚提示装置にパラレルリンク機構を用いることにより、高剛性、高出力、高バックドライバビリティ、低慣性を実現可能なため、高品質な力覚提示が可能である。また、本発明の構成要素であるパラレルリンク機構は、従来機構と異なり、機構の一側へ機構本体および駆動手段を配置できるため、従来のパラレルリンク機構と比較して広い作業領域を得ることが可能である。また、冗長自由度を有していないため、製作コスト面においても従来機構と比して不利はない。さらに、機構の一側へ機構本体および駆動手段を配置できる特徴により、2つのパラレルリンク機構を連結して配置することで、小型でありながら、広い動作域を有し、回転自由度を有する多自由度の力覚提示マニピュレータを提供できる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態に係る力覚提示マニピュレータのシステムを示す図である。
【図2】本発明の一実施形態に係る力覚提示マニピュレータの斜視図である。
【図3】本発明の一実施形態に係る力覚提示マニピュレータを構成する一対のパラレルリンク機構20の機構モデル図である。
【図4】本発明の一実施形態に係る回転自由度を有する力覚提示マニピュレータの斜視図である。
【図5】本発明の一実施形態に係る回転自由度を有する力覚提示マニピュレータを構成する一対のジンバル機構70の機構モデル図である。
【発明を実施するための形態】
【0022】
まず、本発明の力覚提示マニピュレータは、エンドエフェクタがマニピュレータのベースに対して、3自由度の並進動作の回転動作を出力する。
【0023】
以下、図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0024】
図1は、本発明の一実施形態に係わる力覚提示マニピュレータを用いた、力覚提示システムを示している。
【0025】
本発明は、力覚提示マニピュレータであるマニピュレータ1と、マニピュレータ1の駆動手段を制御するコントロール部2と、力覚が取得できるロボット、若しくは、バーチャル・システム等からなる操作対象3から構成される。このシステムは、遠隔操作ロボットの力覚フィードバック付操縦桿、バーチャル・リアリティを用いた訓練システムの力覚提示装置等に用いられる。
【0026】
次に、図2から図3を参照して、マニピュレータ1の構成について詳しく説明する。図2は本実施形態における機構モデルの斜視図、図3は本実施形態の斜視図である。
【0027】
マニピュレータ1は、パラレルリンク機構20により構成される。パラレルリンク機構20は、ベース10と、駆動手段26、27、28と、各駆動部に連結し、駆動手段の動力をエンドエフェクタの3自由度並進動作に変換する第1アーム21、第2アーム22により構成される。
【0028】
第1アーム21は、第1平行4節リンク23と、第2平行4節リンク24と、第1駆動手段26と、第2駆動手段27と、から構成される。
【0029】
第1平行4節リンク機構23は、第1リンク31、第2リンク32、第3リンク34、第4リンク37から構成され、それぞれのリンクは第1軸30、第2軸33、第3軸35、第4軸36により接続されている。これらの軸は回転自在に連結される。
【0030】
第1平行4節リンク機構23の第1リンク31と第2リンク32は、第1駆動手段26と第2駆動手段27に接続される。力覚提示マニピュレータに使用する動力伝達手段には、正確な動力伝達を必要とするため、動力伝達手段における摩擦やガタ等による伝達損失を極力抑える必要がある。
【0031】
第2平行四節リンク機構24は、第5リンク39、第6リンク42、2本の第7リンク43から構成されており、それぞれ第5軸38、第7軸41により接続されている。これらの軸は回転自在に連結される。第2平行四節リンク機構24は、第5リンク39が第1平行四節リンク機構23の第3軸35と固定されている必要がある。
【0032】
第2アーム22は、第1単独リンク44と、第3平行4節リンク機構25と、第3駆動手段28と、から構成される。
【0033】
第1単独リンク44は、第1単独リンク軸45により、第3駆動手段28に接続される。力覚提示マニピュレータに使用する動力伝達手段には、正確な動力伝達を必要とするため、動力伝達手段における摩擦やガタ等による伝達損失を極力抑える必要がある。
【0034】
第3平行四節リンク機構25は、第8リンク48、第9リンク51、2本の第10リンク52から構成されており、それぞれ第8軸47、第10軸50により接続されている。これらの軸は回転自在に連結される。第3平行四節リンク機構25は、第8リンク48が第1単独リンク44の回転対偶である第2単独リンク軸46と固定されている必要がある。
【0035】
第1アーム21と第2アーム22のそれぞれ末端部である第6軸40と、第9軸49より、エンドエフェクタ60へそれぞれ回転自在で連結する。このときのエンドエフェクタ60への接続角度は、アームの設置角度θと同じであることが望ましい。なお、第1アーム21と第2アーム22は、広い動作域と良好な力覚提示機能のため、同一円周上に90度等配であることが望ましく、よってθを90度とすることが望ましい。
【0036】
このようにパラレルリンク機構20を構成することにより、エンドエフェクタ60は並進方向への動作拘束を有し、結果として並進移動をベース10に固定した駆動手段により可能とする。このときの運動学は簡便に幾何学的に与えられる。
【0037】
次に、マニピュレータ1の駆動手段を制御するコントロール部2と、マニピュレータ1によって操作する操作対象3について説明する。
【0038】
コントロール部2は、例えばモータドライバや制御コンピュータから構成される。コンピュータは、例えばエンコーダなどのセンサから力覚提示マニピュレータの動作を演算し、位置指令として操作対象3へ情報を出力する。また、操作対象3から入力された力情報からモータドライバの制御信号を生成し、モータドライバに出力する。モータドライバは入力された制御信号に基づき駆動手段を駆動する。各駆動手段からの動力はパラレルリンク機構20によってエンドエフェクタ60まで伝達され、エンドエフェクタ60は所望の力を提示する。
【0039】
操作対象3は、例えば力情報が取得可能な遠隔ロボットで構成される。コントロール部2からの入力情報により遠隔ロボットは駆動され、環境から得た力情報をコントロール部2に出力する。
【0040】
以上に述べた構成によれば、エンドエフェクタ60において姿勢の変化しない、並進3自由度の力覚提示が可能な力覚提示システムを実現することができる。本発明のパラレルリンク機構20は、駆動手段を装置片側へまとめて配置可能であるため、機構の大きさに対して比較的大きな作業領域が得られる。
【0041】
本発明のパラレルリンク機構20は、回転自由度を有する多自由度力覚提示マニピュレータ80へ応用可能である。図4から図5を参照して、回転自由度を有する多自由度力覚提示マニピュレータ80の構成について詳しく説明する。図4はこの実施形態の斜視図、図5は一対のジンバル機構70周辺部の斜視図である。
【0042】
一対のパラレルリンク機構20の末端部であるエンドエフェクタ60に連結される一対のジンバル機構70a、70bは、それぞれエンドエフェクタ60と、エンドエフェクタ60に備えた第1ジンバル軸71a、71bと、回転自在に連結する第1ジンバル軸71a、71bとそれぞれ直交する第2ジンバル軸72a、72bを備える第11リンク73a、73bと、第11リンク73a、73bと第2ジンバル軸72a、72bと回転自在に連結する第12リンク74a、74bと、から構成されている。一対のジンバル機構70a、70bのそれぞれは、第1ジンバル軸71a、71bと第2ジンバル軸72a、72bの交点(ジンバル回転中心75a、75b)まわりに回転2軸を有する。
【0043】
多自由度エンドエフェクタ76は、一対のジンバル機構70a、70bのジンバル回転中心75a、75bにより、異なる2点で支持されている。多自由度エンドエフェクタ76は、第11軸77を備え、一対のジンバル機構70a、70bのそれぞれの第12リンク74a、74bを第11軸77まわりに回転自在となるよう連結されている。この際、第11軸77がジンバル回転中心75を通るようにする。多自由度エンドエフェクタ76は、異なる2点を一対のジンバル機構70a、70bにより支持し、一対のジンバル機構70a、70bにパラレルリンク機構20から得られる3自由度の並進動作を与えて制御することにより、ベース10に対して3自由度の並進動作および2自由度の回転動作を得る。
【0044】
回転自由度を有する多自由度力覚提示マニピュレータ80を構成する一対のパラレルリンク機構20の配置として、機械的な干渉を避け、小型とするために、Y軸方向へ連続して配置することが望ましい。また、一対のパラレルリンク機構20の第1アーム21と第2アーム22の配置は、それぞれ鏡面対象とすることで、力覚提示機能の空間的偏りを平均化することが可能となるため、望ましい。
【0045】
次に、回転自由度を有する多自由度力覚提示マニピュレータの作動について説明する。操作者は多自由度エンドエフェクタ76を、ペンを持つように握る。多自由度エンドエフェクタ76はパラレルリンク機構20のベース10に対して3軸方向の平行移動および、2軸まわりの回転運動が可能であり、操作者が自由に動作させることが可能である。
【0046】
以上に述べた構成によれば、図1で述べた同様の構成により、マニピュレータ1として回転自由度を有する多自由度力覚提示マニピュレータを用い、操作者が操作することにより、操作対象3を自由に動作させることが可能であり、操作対象3に加えられた力をマニピュレータ1で実現し、操作者がその力を感じることが可能である。
【0047】
以上において、本発明を実施形態に則して説明したが、本発明は上記実施形態に制限されるものではなく、その趣旨を逸脱しない範囲で適宜変更して適用できることはいうまでもない。
【産業上の利用可能性】
【0048】
本発明の力覚提示マニピュレータは、遠隔操作ロボットの力覚フィードバック付操縦桿、バーチャル・リアリティを用いた訓練システムの力覚提示装置等に利用可能である。
【符号の説明】
【0049】
1 マニピュレータ
2 コントロール部
3 操作対象
10 ベース
20 パラレルリンク機構
21 第1アーム
22 第2アーム
23 第1平行四節リンク機構
24 第2平行四節リンク機構
25 第3平行四節リンク機構
26 第1駆動手段
27 第2駆動手段
28 第3駆動手段
30 第1軸
31 第1リンク
32 第2リンク
33 第2軸
34 第3リンク
35 第3軸
36 第4軸
37 第4リンク
38 第5軸
39 第5リンク
40 第6軸
41 第7軸
42 第6リンク
43 第7リンク
44 第1単独リンク
45 第1単独リンク軸
46 第2単独リンク軸
47 第8軸
48 第8リンク
49 第9軸
50 第10軸
51 第9リンク
52 第10リンク
60 エンドエフェクタ
70(70a、70b) ジンバル機構
71(71a、71b) 第1ジンバル軸
72(72a、72b) 第2ジンバル軸
73(73a、73b) 第11リンク
74(74a、74b) 第12リンク
75(75a、75b) ジンバル回転中心
76 多自由度エンドエフェクタ
77 第11軸
80 回転自由度を有する多自由度な力覚提示マニピュレータ
【特許請求の範囲】
【請求項1】
駆動手段によって駆動される多自由度力覚提示マニピュレータであり、直交する3軸(X軸、Y軸、Z軸)を有する基準座標系に固定したマニピュレータのベースに対して、エンドエフェクタが、X軸方向の並進運動、Y軸方向の並進運動、Z軸方向の並進運動、の3自由度を有し、駆動手段の動力が、リンク機構によって、X軸方向の並進、Y軸方向の並進、Z軸方向の並進、の各運動に変換されるパラレルリンク機構により構成され、パラレルリンク機構は、第1アームと、第2アームと、前記エンドエフェクタと、から構成され、前記第1アームは、第1平行四節リンク機構と、第2平行四節リンク機構と、第1駆動手段と、第2駆動手段と、から構成されており、前記第2アームは、第1単独リンクと、第3平行四節リンク機構と、第3駆動手段と、から構成されていることを特徴とする力覚提示マニピュレータ。
【請求項2】
前記第1平行四節リンク機構は、前記ベースに備えた第1軸を回転軸とする第1リンクと、前記第1軸を回転軸とする第2リンクと、前記第2リンクに備えた前記第1軸と平行な第2軸に回転自在に連結する第3リンクと、前記第1リンクおよび前記第3リンクのそれぞれに備えた前記第1軸と平行な第3軸および第4軸に回転自在で連結する第4リンクと、から構成され、前記第1リンクに前記第1軸まわりの回転運動を与える第1駆動手段と、前記第2リンクに前記第2軸まわりの回転運動を与える第2駆動手段と、が連結され、前記第1、第2、第3、第4リンクは平行四辺形をなしており、前記第2平行四節リンク機構は、一対の第5軸を備える第5リンクと、第6軸および前記第6軸に直交する一対の第7軸を備える第6リンクと、前記第5、第6リンクを前記第5、第7軸で回転自在に連結する一対の第7リンクと、から構成され、前記第5、第6、第7リンクは平行四辺形をなしており、前記第2平行四節リンク機構の前記第5軸が前記第1平行四節リンク機構の前記第3軸と直交するよう前記第5リンクが前記第4リンクに固定されており、前記第1単独リンクは、前記ベースに備えた第1単独リンク軸を回転軸とし、前記第1単独軸と平行な第2単独リンク軸をもち、第3駆動手段により前記第1単独リンク軸は回転運動を与えられ、前記第3平行四節リンク機構は、一対の第8軸を備える第8リンクと、第9軸および前記第9軸に直交する一対の第10軸を備える第9リンクと、前記第8リンク、前記第9リンクを前記第8軸、前記第10軸で回転自在に連結する一対の第10リンクと、から構成され、前記第8、第9リンク、第10リンクは平行四辺形をなしており、前記第3平行四節リンク機構の前記第8軸が前記第1単独リンクの前記第2単独リンク軸と直交するように回転自在に連結されており、前記エンドエフェクタは前記第1アームと第2アームの末端部である前記第6軸と前記第9軸と回転自在で連結されていることを特徴とする請求項1に記載の力覚提示マニピュレータ。
【請求項3】
駆動手段によって駆動される回転自由度を有する多自由度力覚提示マニピュレータであり、直交する3軸(X軸、Y軸、Z軸)を有する基準座標系に固定したマニピュレータのベースに対して、エンドエフェクタが、X軸方向の並進運動、Y軸方向の並進運動、Z軸方向の並進運動、X軸方向に平行な軸についての回転運動、Y軸方向に平行な軸についての回転運動の少なくとも5自由度を有し、駆動手段の動力が、リンク機構によって、X軸方向の並進、Y軸方向の並進、Z軸方向の並進、X軸方向に平行な軸についての回転、Y軸方向に平行な軸についての回転の各運動に変換されるようになっており、一対の前記パラレルリンク機構と、一対の前記パラレルリンク機構のそれぞれの前記エンドエフェクタを連結する一対の回転2軸を有するジンバル機構と、多自由度エンドエフェクタと、から構成され、前記一対のジンバル機構は、前記一対のパラレルリンク機構の前記エンドエフェクタにそれぞれ備えた第1ジンバル軸と、回転自在に連結する第1ジンバル軸と直交する第2ジンバル軸を備える第11リンクと、前記第11リンクと前記第2ジンバル軸と回転自在で連結する第12リンクと、から構成されており、一対のジンバル機構のそれぞれの前記第12リンクは、第11軸を備える前記多自由度エンドエフェクタに、それぞれの第1、第2ジンバル軸の交点であるジンバル回転中心を前記第11軸が通るように回転自在に連結されていることを特徴とする回転自由度を有する多自由度の力覚提示マニピュレータ。
【請求項1】
駆動手段によって駆動される多自由度力覚提示マニピュレータであり、直交する3軸(X軸、Y軸、Z軸)を有する基準座標系に固定したマニピュレータのベースに対して、エンドエフェクタが、X軸方向の並進運動、Y軸方向の並進運動、Z軸方向の並進運動、の3自由度を有し、駆動手段の動力が、リンク機構によって、X軸方向の並進、Y軸方向の並進、Z軸方向の並進、の各運動に変換されるパラレルリンク機構により構成され、パラレルリンク機構は、第1アームと、第2アームと、前記エンドエフェクタと、から構成され、前記第1アームは、第1平行四節リンク機構と、第2平行四節リンク機構と、第1駆動手段と、第2駆動手段と、から構成されており、前記第2アームは、第1単独リンクと、第3平行四節リンク機構と、第3駆動手段と、から構成されていることを特徴とする力覚提示マニピュレータ。
【請求項2】
前記第1平行四節リンク機構は、前記ベースに備えた第1軸を回転軸とする第1リンクと、前記第1軸を回転軸とする第2リンクと、前記第2リンクに備えた前記第1軸と平行な第2軸に回転自在に連結する第3リンクと、前記第1リンクおよび前記第3リンクのそれぞれに備えた前記第1軸と平行な第3軸および第4軸に回転自在で連結する第4リンクと、から構成され、前記第1リンクに前記第1軸まわりの回転運動を与える第1駆動手段と、前記第2リンクに前記第2軸まわりの回転運動を与える第2駆動手段と、が連結され、前記第1、第2、第3、第4リンクは平行四辺形をなしており、前記第2平行四節リンク機構は、一対の第5軸を備える第5リンクと、第6軸および前記第6軸に直交する一対の第7軸を備える第6リンクと、前記第5、第6リンクを前記第5、第7軸で回転自在に連結する一対の第7リンクと、から構成され、前記第5、第6、第7リンクは平行四辺形をなしており、前記第2平行四節リンク機構の前記第5軸が前記第1平行四節リンク機構の前記第3軸と直交するよう前記第5リンクが前記第4リンクに固定されており、前記第1単独リンクは、前記ベースに備えた第1単独リンク軸を回転軸とし、前記第1単独軸と平行な第2単独リンク軸をもち、第3駆動手段により前記第1単独リンク軸は回転運動を与えられ、前記第3平行四節リンク機構は、一対の第8軸を備える第8リンクと、第9軸および前記第9軸に直交する一対の第10軸を備える第9リンクと、前記第8リンク、前記第9リンクを前記第8軸、前記第10軸で回転自在に連結する一対の第10リンクと、から構成され、前記第8、第9リンク、第10リンクは平行四辺形をなしており、前記第3平行四節リンク機構の前記第8軸が前記第1単独リンクの前記第2単独リンク軸と直交するように回転自在に連結されており、前記エンドエフェクタは前記第1アームと第2アームの末端部である前記第6軸と前記第9軸と回転自在で連結されていることを特徴とする請求項1に記載の力覚提示マニピュレータ。
【請求項3】
駆動手段によって駆動される回転自由度を有する多自由度力覚提示マニピュレータであり、直交する3軸(X軸、Y軸、Z軸)を有する基準座標系に固定したマニピュレータのベースに対して、エンドエフェクタが、X軸方向の並進運動、Y軸方向の並進運動、Z軸方向の並進運動、X軸方向に平行な軸についての回転運動、Y軸方向に平行な軸についての回転運動の少なくとも5自由度を有し、駆動手段の動力が、リンク機構によって、X軸方向の並進、Y軸方向の並進、Z軸方向の並進、X軸方向に平行な軸についての回転、Y軸方向に平行な軸についての回転の各運動に変換されるようになっており、一対の前記パラレルリンク機構と、一対の前記パラレルリンク機構のそれぞれの前記エンドエフェクタを連結する一対の回転2軸を有するジンバル機構と、多自由度エンドエフェクタと、から構成され、前記一対のジンバル機構は、前記一対のパラレルリンク機構の前記エンドエフェクタにそれぞれ備えた第1ジンバル軸と、回転自在に連結する第1ジンバル軸と直交する第2ジンバル軸を備える第11リンクと、前記第11リンクと前記第2ジンバル軸と回転自在で連結する第12リンクと、から構成されており、一対のジンバル機構のそれぞれの前記第12リンクは、第11軸を備える前記多自由度エンドエフェクタに、それぞれの第1、第2ジンバル軸の交点であるジンバル回転中心を前記第11軸が通るように回転自在に連結されていることを特徴とする回転自由度を有する多自由度の力覚提示マニピュレータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−107155(P2013−107155A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−252782(P2011−252782)
【出願日】平成23年11月18日(2011.11.18)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成20年度、独立行政法人新エネルギー・産業技術総合開発機構「がん超早期診断・治療機器の総合研究開発/超低侵襲治療機器システムの研究開発/内視鏡下手術支援システムの研究開発プロジェクト」委託事業、産業技術力強化法19条の適用を受ける特許出願
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成20年度、独立行政法人新エネルギー・産業技術総合開発機構「がん超早期診断・治療機器の総合研究開発/超低侵襲治療機器システムの研究開発/内視鏡下手術支援システムの研究開発プロジェクト」委託事業、産業技術力強化法19条の適用を受ける特許出願
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
[ Back to top ]