
少ない数のGPS衛星と同期および非同期基地局を使用して位置を決定する方法および装置
【課題】グローバル位置決定システム(GPS)衛星と、GPS時間に同期している基地局と、GPS時間に非同期の基地局とを使用している無線通信装置の位置を決定する方法および装置を提供する。
【解決手段】非同期基地局は互いに同期している。到着時間情報は、無線通信装置が基地局からの受信されたGPS時間情報が無線通信装置に通知する信号の受ける遅延である片道遅延によりバイアスされた情報を受信することを考慮して調整される。さらに、GPS時間に同期されていない基地局に対する到着時間差情報はこれらの基地局GPS時間間のバイアスが消去されることを可能にする。
【解決手段】非同期基地局は互いに同期している。到着時間情報は、無線通信装置が基地局からの受信されたGPS時間情報が無線通信装置に通知する信号の受ける遅延である片道遅延によりバイアスされた情報を受信することを考慮して調整される。さらに、GPS時間に同期されていない基地局に対する到着時間差情報はこれらの基地局GPS時間間のバイアスが消去されることを可能にする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、通信システムに関する。特に、本発明は、コード分割多元アクセスシステムにおいて無線通信装置の位置を決定するシステムおよび技術に関する。
【背景技術】
【0002】
無線ネットワークにおける位置決定技術の展開は調整力によって駆動され、1つのキャリアにより提供されたサービスを別のものにより提供されたサービスと区別することにより歳入を増加するためにキャリアの望んでいることである。さらに1996年6月の米国連邦通信委員会(FCC)は強化された緊急911(E-911)サービスに対する支援を命令している。命令のフェーズIではセクターおよびセル情報はPSAP(公共安全回答ポイント)機関に送返すことを要求している。命令のフェーズIIではセルラトランシーバの位置はPSAPに送返すことを要求している。FCCの命令にしたがうために、全体で77,000のサイトは2005年までに自動位置決定技術を備えなければならない。
【0003】
多くの技術が自動的位置決定能力を与えるために考えられている。1つの技術では多数のセルサイトからの信号の到着時間の差を測定することを含んでいる。これらの信号は三角測量で位置情報を抽出する。残念ながら、この技術は有効にするためには高いセル密度および、またはサイトの送信パワーの増加を必要とする。これは典型的なCDMAシステムでは、各電話機は最も近いセルサイトに到着するのに十分な程度の信号電力しか送信されないことによるものである。三角測量はすくなくとも3つのサイトと通信する必要があり、セルサイトの密度が増加されるか、または各無線通信装置の信号パワーが増加されなければならない。
【0004】
いずれにせよ、各方法にはそれぞれ欠点がある。セルサイト数の増加はコストがかかりすぎる。信号パワーの増加は各無線通信装置の重量とコストを増加させねばかりでなく、無線ユーザ間の干渉の可能性を増加させる。さらに、ネットワーク三角測量法はFCCの命令の要求には合致しない。
【0005】
別の方法はセルラ電話に対するGPS(グローバル位置決定システム)機能性の付加を含む。この方法は視線にある4個の衛星を必要するために無線通信装置にかなりのコストおよび重量を付加し、動作も遅いが、それにもかかわらず位置決定サービスに対しては最も正確な方法である。
【0006】
処理の速度を増加させるための、第3の方法では、無線通信装置がGPS搬送波に対して周波数を見なければならないことを示す目標指向(aim) 情報を無線通信装置に送る方法である。大抵のGPS受信機は、可視の衛星からの信号に対して周波数ドメインで受信機により行われるサーチを最小にするためにGPS衛星アルマナック(almanac)として知られているものを使用する。このアルマナックは粗いエフェメリス(ephemeris)の15,000ビットブロックであり、全体の星座の時間モデルデータである。衛星の位置に関するアルマナックの情報および現在の1日の時間は近似的にそれだけである。アルマナックなしには、GPS受信機は衛星信号を捕捉するために最大の広い範囲の可能性のある周波数のサーチを行わなければならない。付加的な処理は、他の衛星を捕捉することを目的としている付加的な情報を得るために必要である。
【0007】
信号捕捉処理はサーチされる必要がある多数の周波数ビンのために数分を必要とする。各周波数ビンは中心周波数と予め定められた帯域幅を有している。アルマナックの利用性は衛星のドップラにおける不確実性を減少させ、それ故、サーチされるビンの数は減少する。
【0008】
衛星のアルマナックはGPSナビゲーションメッセージから抽出され、あるいは受信機に対するデータまたはシグナリングメッセージとしてダウン(順方向)リンクで送信されることができる。この情報を受信するとき、受信機はGPS信号の処理を行ってその位置を決定する。この方法は多少迅速であるが、視線にある4個以上の衛星を必要とする。これは都市環境では問題を生じる可能性がある。
【0009】
したがって、セルラの位置決定のための迅速で、正確で、廉価なシステムの技術的な必要性が存在している。
【発明の概要】
【0010】
この技術的な必要性は本発明により開示された無線トランシーバの位置を決定するシステムおよび方法によって解決される。最も一般的な意味において、本発明の方法は、地球上のシステムからの距離情報と、無線通信装置からのタイミング情報と、GPS衛星からの距離情報とを使用して位置を決定するハイブリッド方法である。この情報は組合わされて無線通信装置の位置を迅速に確実に決定することを可能にする。開示された方法は、無線通信装置において、第1のGPS衛星から送信された第1の信号と、第2のGPS衛星から送信された第2の信号と、第3のGPS衛星から送信された第3の信号とを受信するステップを含んでいる。無線通信装置はこれらのGPS信号を受信して、それに応答して基地局に第4の信号を送信するように構成されている。基地局は第4の信号を受信し、基地局と無線通信装置との間の往復遅延によって第4の信号に与えられたクロックバイアスに対して補正し、バイアスされない第4の信号を使用して無線通信装置の位置を計算する。
【0011】
特定の構成において、基地局は無線通信装置に目標指向情報を送信する。目標指向情報は無線通信装置によって使用され、第1、第2、第3の衛星によって送信された信号を迅速に捕捉する。目標指向情報は無線通信装置をサービスする基地局トランシーバサブシステム(BTS)、基地局制御装置(BSC)またはその他のエンティティにおいて集められた情報から導出され、(1)衛星識別子情報と、(2)ドップラシフトまたは関連する情報と、(3)基地局と各衛星との間の距離を示す値と、(4)各衛星に関連するサーチウインドウサイズを含んでおり、サーチウインドウサイズは無線通信装置と基地局との間の往復遅延と各衛星の高低角とに基づいて計算される。
【0012】
第1、第2、第3の衛星によって送信された信号を無線通信装置で捕捉したとき、無線通信装置は無線通信装置と第1の衛星との間の距離pm1 と、無線通信装置と第2の衛星との間の距離pm2 と、無線通信装置と第3の衛星との間の距離pm3 とを計算する。この距離情報は、測定が行われた時間に関する情報と共に基地局に送り返される。CDMA構成においては、基地局アンテナと無線通信装置アンテナとの間の信号の伝搬に要した時間は往復遅延時間の半分であり、基地局によって知られている。無線通信装置と基地局との間の往復遅延の測定値は無線通信装置と基地局との間の距離を示している。さらに、この遅延は無線通信装置の絶対時間を補正する手段を与える。
【0013】
基地局制御装置またはセルラインフラストラクチャに関連するその他のエンティティのような無線通信装置の外部の装置は、サービス基地局に対して知られている情報を利用して無線通信装置の位置を計算する。このような情報には、無線通信装置に関する第1、第2、第3の衛星の位置および無線通信装置と基地局との間の距離が含まれている。無線通信装置の位置の決定は、(1)第1の衛星を囲む第1の球の半径cp1 と、(2)第2の衛星を囲む第2の球の半径cp2 と、(3)第3の衛星を囲む第3の球の半径cp3 と、(4)基地局を囲む第4の球の半径cpbとを発見することによって行われる。“c”は光の速度であり、“p1 ”は第1の衛星と無線通信装置に関連する擬似レンジであり、“p2 ”は第2の衛星と無線通信装置に関連する擬似レンジであり、“p3 ”は第3の衛星と無線通信装置に関連する擬似レンジであり、“cpb”は基地局と無線通信装置に関連する擬似レンジである。
【0014】
視線(多通路ではない)が無線通信装置と基地局との間に存在する場合には、提案された方法は、2つの衛星と基地局との間の測定しか必要としない。CDMA通信システムのようなGPS時間に同期されている無線通信システムの場合には、基地局によって送信された信号から取出された擬似距離測定は、衛星の擬似距離測定からバイアスを除去するためと付加的な距離測定として使用される。他の基地局からの付加的な情報は、もし利用可能であれば、無線通信装置の位置を決定するために必要な衛星の数をさらに減少させるために使用されることができる。2次元の位置しか必要のない場合には、1個の衛星と1個の基地局しか必要ではない。
【0015】
本発明が他の既知のGPS方法に比較して優れているの1つの重要な効果は、無線通信装置が擬似距離を決定することのできる速度である。サービスしている基地局トランシーバ、基地局制御装置、または基地局に結合されたその他のエンティティはその自分のGPS受信機を有しており、また、サービスしている基地局の位置に関して追跡されている全ての衛星の擬似レンジを知っているから、追跡している各衛星に対するサーチウインドウの中心およびサーチウインドウのサイズを決定することが可能である。情報は無線通信装置に送られ、サーチ処理の速度を増加させる。
【0016】
すなわち、各GPS衛星に搭載されたクロックは衛星による距離信号の放送のタイミングを制御する。このような各クロックはGPSシステムの時間に同期される。基地局はまたGPSシステムの時間に同期されたクロックを備えている。無線通信装置はそのクロックを基地局と無線通信装置との間の片道の遅延に対応した遅延によりGPS時間に同期する。タイミング情報は衛星距離信号内に埋込まれ、その衛星距離信号は信号が特定の衛星から送信された時点を無線通信装置が計算することを可能にする。信号が受信された時間を記録することによって、衛星から無線通信装置までの距離は計算することができる。その結果、無線通信装置の位置の軌跡は衛星の位置を中心とし、計算された距離に等しい半径の球面上にある。測定が2つの他の衛星の距離を使用して同時に行われたならば、無線通信装置3つの球面上のどこかにある。しかしながら、3つの球面は2点で交差し、それらの点の1つだけが正しい無線ユーザの位置である。候補となる位置は3つの衛星を含む平面に関して互いに鏡像の関係である。
【0017】
開示された方法および装置の1実施形態では、時間的に所定の点における無線通信装置の位置の決定のためのGPS衛星は基地局によって識別される。この情報は無線通信装置に転送されて無線通信装置によって行われるサーチ動作を容易にする。
【0018】
上記に加えて、無線通信装置が符号分割多元アクセス(CDMA)受信機であるとき、本発明の方法および装置は、CDMAが同期システムであることを利用できる。同期しているため、無線通信装置における基準パイロットの到着時間は時間基準として使用されることができる。したがって、無線通信装置は基準パイロットと、GPS信号と、その他のパイロットとの間の到着時間差を測定することができる。したがって、無線通信装置の位置の決定の問題は到着時間差(TDOA)の問題となり、結果的に無線通信装置の位置を決定するために必要な衛星の数をさらに減少させることができる。
【0019】
1実施形態では、無線通信装置は以下のようないくつかの動作モードを有することができる。
(1)無線システムインフラストラクチャとGPS衛星の両者からの情報を使用するハイブリットモード;
(2)独立型(標準的または通常の)GPSモード;
(3)目標指向独立型GPSモード;
(4)反転された微分GPSモード;
(5)目標指向および反転された微分GPSモード
【図面の簡単な説明】
【0020】
【図1】無線(CDMA)通信システムの基地局および無線通信装置の構成を示す概略図。
【図2】例示的なCDMAセルラ電話システムのブロック図。
【図3】第1、第2、および第3の基地局および無線通信装置の簡単化された構成のブロック図。
【図4】本発明により構成された基地局の簡単化された構成のブロック図。
【図5】本発明の無線CDMAトランシーバの位置を決定するための無線通信システムのブロック図。
【図6】本発明の無線通信装置の受信機、制御信号インターフェース、デジタルIF、および無線復調回路の一部分の例示的な構成を示すブロック図。
【図7】無線通信装置の位置を決定するための機能モデルの説明図。
【図8】時間ドメインにおけるサーチウインドウのサイズおよび中心の計算を示す説明図。
【図9】ローカルクロックバイアスの補正を示す説明図。
【図10】3つの基地局から送信されたパイロットPNシーケンスの間の関係を示す説明図。
【図11】3つの基地局から送信されたパイロットPNシーケンスの間の関係を示す説明図。
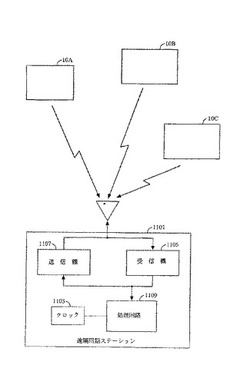
【図12】複数の基地局から既知の距離で離れて位置している遠隔同期局の簡単化されたブロック図。
【図13】基地局制御プロセッサと、既知の距離に位置する遠隔同期局を使用する送信アンテナの放射中心との間で導入される遅延、または信号が既知の伝送遅延で伝送される遅延量を決定するために使用される方法のの説明図。
【図14】基地局に対するTDOAが同期GPS/順方向リンクモードにしたがって計算される方法の説明図。
【詳細な説明】
【0021】
本発明の例示的な実施形態を添付図面を参照にして以下説明する。
本発明の方法および装置はここで特定の応用のための例示的な実施形態を参照にして説明されるが、本発明はそれに限定されないことを理解すべきである。当業者およびこの技術にアクセスする者は、本発明の技術的範囲内における付加的な変形、応用、および実施形態、ならびに本発明が顕著な利用性を示す付加的な分野を認識するであろう。
【0022】
図1は、無線通信装置20および無線CDMA通信システムの基地局10または衛星60, 70, 80, 90のような外部信号源の配置を示している。通信システムは建物40および地上の妨害物50により囲まれている。基地局10と無線通信装置20は複数のGPS衛星(その4個が衛星60, 70, 80, 90として示されている)を有するGPS(グローパル位置決定システム)環境中に配置されている。このようなGPS環境はよく知られている。例えば、Hofman-Wellenhof,B, 他、GPS理論および実用第2巻、ニューヨーク:Springer-Verlag Wien,1993 年参照。当業者はこの技術が、本発明の技術的範囲を逸脱することなくアドバンスモビール電話システム(AMPS)、移動体通信のためのグローパルシステム(GSM(登録商標))等のようなその他の通信システムに適用可能であることを認識するであろう。
【0023】
典型的なGPSアプリケーションにおいて、GPS受信機がその位置を決定するためには4以上の衛星が必要とされる。対照的に、ここに開示された方法および装置は、3つのGPS衛星しか使用しないで、無線通信装置とサービス基地局10のような外部信号源との間の往復遅延と、サービス基地局10の既知の位置とを使用して無線通信装置20の3次元位置を決定する。直接の視線が利用できる場合には、無線通信装置20の位置決定には2つのGPS衛星と、往復遅延と、サービス基地局10の既知の位置しか必要としない。この数はCDMAセルサイト通信システムの順方向リンクから、あるいは任意の他の同期セルラ通信システムからの情報の到着時間差を使用することによってさらに減少させることができる。この開示の目的に対して、セルラ通信システムは、無線通信装置がシステムの付近を移動するとき、無線通信装置が複数のセルの少なくとも1つの通信システムから信号を受信することを可能にする通信システムとして定義される。
【0024】
図2はCDMAセルラ電話システム30のブロック図である。このシステム30は基地局制御装置(BSC)14を有する移動体電話交換局(MSC)12を含んでいる。公共電話交換ネットワーク(PSTN)16は電話ラインからの呼およびMSC12との間の呼の経路を設定する。MSC12はPSTN16からの呼を第1のセル19と関連する発生源基地局10と第2のセル21と関連する目的地基地局11との間の経路を設定する。さらにMSC12は基地局10と11との間の呼の経路設定をする。発生源基地局10は通信路28により第1のセル19内の第1の無線通信装置20に呼を導く。通信路28は順方向リンク31と逆方向リンク32とを有する2方向リンクである。典型的に、基地局10が無線通信装置20と音声通信を設定するとき、通信路28はトラヒックチャンネルを含んでいる。各基地局10,11はただ1つのセルだけと関係しているが、基地局制御装置はしばしば複数のセルの基地局と関連し、それらを管理している。
【0025】
無線通信装置20が第1のセル19から第2のセル21へ移動するとき、無線通信装置20は第2のセル21と関係する基地局と通信を開始する。これは通常は目的基地局への“ハンドオフ”と呼ばれている。“ソフトハンドオフ”では、無線通信装置20は発生源基地局10との第1の通信リンク28に加えて、目的地基地局11との第2の通信リンク34を設定する。無線通信装置20が第2のセル21へ移動し、第2のセルとのリンクが設定された後、無線通信装置20は第1の通信リンク28をドロップしてもよい。
【0026】
ハードハンドオフでは、発生源基地局と目的地基地局の動作は典型的に大きく異なっており、発生源基地局との間の通信リンク34は目的地基地局へのリンクが設定される前にドロップされなければならない。例えば、発生源基地局が第1の周波数帯域を使用しているCDMAシステム内にあり、目的地基地局が第2の周波数帯域を使用している第2のCDMAシステム内にあるとき、無線通信装置は同時に両方の基地局とのリンクを維持することはできない。それは大抵の無線通信装置は同時に2つの異なった周波数帯域に同調することはできない。それは一方は送信周波数帯域であり、他方は受信周波数帯域であるからである。第1の無線通信装置20が第1のセル19から第2のセル21へ移動するとき、発生源基地局10に対するリンクがドロップされ、新しいリンクが目的地基地局との間に設定される。
【0027】
図3は、第1、第2、第3の基地局10A, 10B, 10C と無線通信装置20とを簡単化して示している。図3に示されるように、各基地局はGPSトランシーバ/タイムユニット203 、制御プロセッサ62のような処理回路、GPSアンテナ76,通信回路207 、通信アンテナ201 を備えている。当業者は、制御処理回路が汎用コンピュータ、マイクロプロセッサ、マイクロコンピュータ、専用状態マシン、専用のディスクリートなハードウエア回路、用途特定集積回路(ASIC)、または制御プロセッサにより行われるような記載されたような機能が可能な任意の他の回路であってもよいことを理解するであろう。図4は本発明の方法および装置により構成された基地局10をさらに詳細に示している。図4に示された実施形態では、基地局10は本質的に通常の構成である。別の実施形態では、基地局10は、以下の説明から明らかにされるように基地局が無線通信装置20の位置を決定することを可能にする付加的な機能を含んでいる。通信アンテナ201 はCDMA信号を受信するための受信CDMAアンテナ42とCDMA信号を送信する送信CDMAアンテナ43とを有している。アンテナ42で受信された信号は通信回路207 へ導かれる。通信回路207 は、通信受信機44、レート検出器61、スイッチ63、ボコーダ64、デジタル・アナログ変換器(D/A)65、送信機69、ボコーダ68、アナログ・デジタル変換器(A/D)66を具備している。受信機44はアンテナ42から直接信号を受信する。実際には、受信機44は、復調器、デインターリーバ、デコーダ、および当業者に知られているその他の回路を含んでいる。受信された信号はそれにレート検出器61が関係している適当なチャンネルに割当てられる。制御プロセッサ62はスピーチを検出するために検出された信号のレートを使用する。スピーチが受信されたフレーム中で検出された場合には、制御プロセッサ62は受信したフレームをスイッチ63によってボコーダ64に切換える。ボコーダ64は可変レートのコード化された信号をデコードしてそれに応答してデジタル化された出力信号を出力する。デジタル化されたボコードから戻された信号はデジタル・アナログ変換器65によってスピーチに変換され、スピーカ(図示せず)のような出力装置に与えられる。
【0028】
マイクロホンまたはその他の入力装置(図示せず)からの入力スピーチはアナログ・デジタル変換器66によってデジタル化され、ボコーダエンコーダ68によってボコードされる。ボコードされたスピーチは送信機69に入力される。実際には送信機69は、変調器、インターリーバ、およびエンコーダのような当業者によく知られた装置を含んでいる。送信機69の出力は送信アンテナ43に供給される。
【0029】
図4に示されるように、GPSトランシーバ/時間ユニット203 は受信機74とタイミングおよび周波数ユニット72を含んでいる。タイミングおよび周波数ユニット72はGPS受信機74のGPSエンジンから信号を受取り、その信号を使用してCDMAシステムの適切な動作のためのタイミングおよび周波数基準を発生する。したがって、多くのこのようなCDMAシステムでは、各セルサイトはGPS時間に同期される(すなわち、GPS時間ベース基準を使用してそれから時間クリチカルCDMA送信が導出される[パイロットPNシーケンス、フレームおよびウォルシュ関数を含んでいる])。このような通常のタイミングおよび周波数ユニットおよびGPSエンジンはCDMAシステムでは普通のものであり、技術的によく知られている。通常のタイミングおよび周波数ユニットは周波数パルスおよびタイミング情報を与える。対照的に、本発明で開示されているタイミングおよび周波数ユニット72は高低角、擬似レンジ、衛星識別子(すなわち、各衛星と関連する擬似雑音[PN]オフセット)、および衛星を捕捉する無線通信装置20を助けるために各衛星と関連するドップラシフトに関する情報(すなわち、衛星を捕捉するために必要な時間量を減少させる)を出力することが好ましい。この情報は典型的に通常のタイミングおよび周波数ユニット内で得られるが、典型的に外部装置では必要とされず、与えられることもない。タイミングおよび周波数ユニット72によって与えられる付加的な情報は、通常の基地局で周波数およびタイミング情報に関して行われているのと同じ方法でBSC14に通報されることが好ましい。
【0030】
図5は本発明の1実施形態による無線通信装置20のブロック図である。無線通信装置20は、CDMA送信ならびにGPS信号を受信するように構成された送受信両用アンテナ92を備えていることが好ましい、別の実施形態では別々のアンテナがGPS信号、CDMA信号、および別のシステムの信号のようなその他の信号を送信および受信するために使用される。アンテナ92はデュプレクサ94によって給電されることが好ましい。デュプレクサ94は受信機100 に信号を供給し、送信機200 によって信号を供給される。時間/周波数サブシステム102 は当業者に明らかなように受信機100 に対してアナログおよびデジタル基準信号を供給し、インターフェース300 および送信機200 に対して制御信号供給する。CDMAパワー制御は利得制御回路104 により行われる。本発明の1実施形態では制御信号インターフェース300 はデジタル信号プロセッサ(DSP)である。その代わりに、制御信号インターフェース300 は利得制御機能を行うことのできる別の回路でもよい。制御信号インターフェース300 は無線通信装置20に対して制御信号を与える。受信機100 は無線周波数(RF)の下方変換および第1段の中間周波数(IF)の下方変換を行う。デジタルIF用途特定集積回路(ASIC)400 は第2段の中間周波数のベースバンドへの下方変換、サンプリング、およびアナログ・デジタル変換を行う。移動体復調ASIC500 はデジタルIF ASIC 400をサーチしてそこからのデジタルベースバンドデータと相関して以下さらに詳細に説明するように擬似レンジを確実にする。
【0031】
任意の音声またはデータと共に、擬似レンジは移動体復調ASIC500 によってデジタルIF変調器ASIC 400に送られる。デジタルIF変調器ASIC 400は移動体復調ASIC500 から受信されたデータの第1段IFの上方変換を行う。これらの信号の第2段中間周波数上方変換および無線周波数上方変換は送信機の回路200 において行われる。その後これらの信号は基地局10に送信され、以下説明するように、本発明の方法にしたがって処理される。無線通信装置20により受信された擬似レンジのような無線通信装置20とBSC14との間で通信される位置情報は、無線通信装置20によってデータバーストタイプのメッセージにより基地局10に通報されることが好ましい。そのメッセージは通信工業会/電子工業会(TIA/EIA)により発行された工業標準規格TIA/EIA/IS-167によって規定されたショートメッセージサービス(SMS)のようなメッセージである。そのようなメッセージは基地局10を通ってBSC14に送信される。その代わりに新しく定められたバーストタイプのメッセージが無線通信装置20により基地局10に送信されることができる。
【0032】
図6は、本発明の無線通信装置20の受信機の一部分、制御信号インターフェース、デジタルIF、および移動体復調回路のブロック図である。無線通信装置20の送信機部分は通常の無線通信装置の送信機部分と本質的に同一であり、したがって、簡潔にするためにここでは説明しない。好ましい実施形態では、受信機100 は第1および第2の通路103 および105 を備えており、それらはアンテナ92にデュプレクサ94および第1のスイッチを介して接続されている。当業者は、2ウエフ通信装置とGPS受信機との間のさらに集積された構造が使用できることを認識するであろう。その代わりに、適当なインターフェースを有する2個の別々の受信機が開示されたものと同様の目的を達成することができる。
【0033】
第1の通路103 は受信されたCDMA信号を下方変換して通常のCDMARFの下方変換された出力信号を生成することができる。第1の通路103 は低雑音増幅器108 、第1のバンドパスフィルタ112 、第1のミキサ118 、および第2のバンドパスフィルタ126 を含んでいる。第2の通路105 は図1のGPS衛星60, 70, 80, 90からのGPS信号を下方変換する。第2の通路105 は第2の低雑音増幅器110 を備え、それは第3のバンドパスフィルタ114 に出力を供給する。バンドパスフィルタ114 の出力は第2のミキサ120 に入力される。第2のミキサ120 の出力は第4のバンドパスフィルタ128 に供給される。第1および第2のミキサは第1および第2の局部発振器122 および124 によって局部発振信号を供給されている。第1および第2の局部発振器122 および124 はデュアル位相ロックループ(PLL)116 の制御下で異なった周波数で動作する。デュアルPLLは各局部発振器122 および124 が基準周波数を維持し、第1のミキサ118 の場合には受信したCDMA信号を、また第2のミキサ120 の場合には受信したGPS信号を下方変換することを確実にしている。第2および第4のバンドパスフィルタ126 および128 は通常の設計の第1のIFセクション130 に結合されている。
【0034】
IF復調器130 の出力はデジタルIF ASIC400 中の第2のスイッチ402 に入力される。第1および第2のスイッチ106 および402 は制御信号インターフェース300 の制御下で動作し、第3のミキサ404 、第5のバンドパスフィルタ406 、自動利得制御回路408 、およびA/D変換器410 により通常のCDMAのような方法で、またはGPS処理で音声またはデータ出力を処理する。第3のミキサ404 の第2の入力は局部発振器の出力である。ミキサ404 は供給された信号をベースバンドに変換する。濾波され、利得制御された信号はA/D変換器410 に供給される。A/D変換器410 の出力は同位相成分(I)の第1のデジタルデータ流と直角位相成分(Q)の第2のデジタルデータ流とを含んでいる。これらのデジタル信号はデジタル信号プロセッサ520 に供給され、それはGPS信号を処理して位置決定のために必要な擬似レンジ情報を出力する。
【0035】
本発明の別の実施形態では、2つのバンドパスフィルタ126 および128 からの出力はベースバンド用途特定集積回路(ASIC)に供給され、それはバンドパスフィルタ126 および128 からのIF周波数信号出力をベースバンドに変換し、直角位相および同位相のベースバンド信号を表すデジタル値流を出力する。これらの信号はその後サーチャに供給される。サーチャは本質的にCDMA復調装置で使用される通常のサーチャと同一である。しかしながら、使用されることが好ましいサーチャは、基地局から送信されたCDMA信号と関連されたPNコードまたはGPS衛星と関連されたPNコードのいずれかに対してサーチャがサーチすることができるようにプログラムされている。サーチャは基地局からCDMA信号を受信したときCDMAチャンネルを弁別し、GPSモードにあるとき受信されたGPS信号が送信されているGPS衛星を決定する。さらに、一度GPS信号が捕捉されると、サーチャは、当業者に理解されるように信号が受信されている衛星と関連する擬似レンジを決定するために通常の方法で本質的にPNコードと関連した時間オフセットを指示する。
【0036】
当業者に理解されるように、図6に示されたような2重変換プロセスまたは代わりに単一の変換およびIFサンプリング技術、または直接変換が必要なIおよびQサンプルを生成するために使用されることができる。さらに、図6に示される実施形態の構造は、開示された方法および装置の動作に影響を与えない多くの方法によって変更されることができる。例えば、通常のプログラム可能なプロセッサが図6に示されたDSPの代わりに使用されてもよい。メモリ510 はシステムを通るデータ流がバッファを必要としないような速度である場合には要求されない。バンドパスフィルタ406 と自動利得制御回路408 は場合によっては省略されてもよく、デジタル技術またはアナログ技術を使用して構成し、またはその他の変更が可能である。多くのその他の図6に示された構造に対する変更は本発明を逸脱することなく行うことができる。さらに、別の実施形態はGPSと無線通信受信機との間のハードウエアおよびソフトウエアリソースを多くすることも少なくすることも可能であることに注意すべきである。
【0037】
図7は開示された方法および装置を含む通信システムのコンポーネントの高いレベルのブロック図である。動作において、開示された方法によれば、BSC14は基地局10内の制御プロセッサ62(図3)からのGPS情報をリクエストする。この情報はGPSトランシーバ74(図3)によって現在観測している全ての衛星の、高低角度、ドップラシフト、および特定の時間における擬似距離を含むがそれに限定されない。GPS受信機は、観察している全ての衛星を常に追跡しているから、観察している各衛星の位置、周波数、およびPNオフセットについての更新情報を有することに注意すべきである。その代わりに基地局10は無線通信装置20により観察されることのできる衛星のみのサブセットに対応するデータを送信することもでき、基地局10は街路の幅および周囲のビルディングの高さに関する情報を記憶することができると仮定する。すなわち、無線通信装置が1以上の衛星の観察が妨害されていることを決定する能力を有する場合には、基地局10は妨害された衛星に関係する情報は送信しない。
【0038】
通常のGPS受信機は、受信機の内部のGPSクロックに関して衛星信号が受信された時間を記録している。しかしながら、受信機の内部のGPSクロックは正確に真のGPS時間に同期されてはいない。それ故、受信機は衛星信号が受信された“真”のGPS時間の正確な時点を知ることはできない。後で、ナビゲーションアルゴリズムは第4の衛星を使用することによってこのエラーを補正する。すなわち、受信機内のクロックが各衛星内のクロックと正確に同期されている場合には、通常のGPS受信機は受信機の正確に位置を決定するためだけに3個の衛星を必要とする。しかしながら、受信機のクロックは正確に衛星のクロックに同期されていないから、付加的な情報が要求される。この付加的な情報は第4の衛星の信号が受信機に受信された時間を記録することによって与えられる。これは、4つの式(すなわち、4つの衛星のそれぞれ1つの式に関係している)および解かれる必要のある4つの未知項(すなわち、受信機のx,y,z座標および受信機クロックのエラー)が存在することに注目することにより理解することができる。それ故、3次元の解に対して少なくとも4つの異なる衛星からの4つの測定値が通常のGPS受信機では必要である。
【0039】
それと対照的に、本発明のシステムは真のGPS時間に同期された1つの地上基地局を使用する。1実施形態では、この基地局はCDMA基地局である。当業者は、CDMA基地局はGPS時間に同期していることを理解するであろう。基地局が完全に同期されていない場合には時間オフセットが較正されることができる。さらに、CDMAプロトコルを使用するそのようなCDMA基地局を通って通信する全ての無線通信装置は各無線通信装置20に特有のオフセットGPS時間に同期されている。時間のオフセットは信号の通信における“実際の遅延”に等しい(すなわち、基地局アンテナから無線通信装置アンテナへの無線信号の伝搬によって生じた片道の遅延プラス基地局の伝送チェイン中のハードウエア遅延により生じる内部遅延による“伝送遅延”)。これは、無線通信装置がクロックをGPS時間の基地局からの指示を受信することによってそのクロックを同期することによるものである(時間/周波数サブシステム102 内において)。しかしながら、その指示が無線通信装置に到着する時間により、その指示には、信号が基地局から無線通信装置に伝送される期間中に実際に受ける遅延に等しい量だけエラーがある。この実際の遅延は基地局と無線通信装置との間の往復を行う信号に必要な時間の長さを測定することによって決定される。片道の遅延は往復の遅延のほぼ半分に等しい。往復の遅延を測定する多くの方法が当業者によって利用可能である。
【0040】
本発明の方法および装置により、時間/周波数サブシステム102 内の処理回路は時間/周波数サブシステム内の内部クロックを補正して、基地局10と無線通信装置20との間で伝送される信号の受ける遅延を考慮に入れることによって無線通信装置をより正確にGPS時間に同期させる。
【0041】
無線通信装置20内で行われる処理は、図5の機能ブロック間で分割されて示されている。しかしながら、この処理機能を行うために使用される特定の構成は単一の処理回路であってもよく、あるいはここに開示されたグループとは異なるグループである機能を行う個々の処理回路であってもよい。そのようなハードウエア内の別の機能のグループ化は、本発明の方法および装置の動作に影響を与えることなく行うことができる。すなわち、当業者は、処理機能が開示された方法および装置の動作に影響を与えることなく、無線通信装置20を通して種々の処理回路出分割または組合わせを行うことができることを理解するであろう。
【0042】
さらに、基地局10と無線通信装置20との間の距離は無線通信装置20の位置決定を助けるために使用されることができる。すなわち、基地局10と無線通信装置20との間の直接の視線が存在する場合には、2個の衛星の距離測定と1つの基地局の距離測定しか必要としない。直接の視線がサービスしている基地局10と無線通信装置20との間に存在しない場合には、3個の衛星と1つの往復遅延測定が3次元位置を計算するために必要とされる。余分の衛星測定はマルチパスにより生じる付加的な遅延により導入される付加的な距離に対するエラーを補正するために必要とされる。往復遅延は無線通信装置中のクロックエラーを補正するために使用される。
【0043】
ここに記載されたシステムは、無線通信装置20がCDMAネットワークのカバー範囲内にあり、CDMAネットワークで十分なサービス品質があるかぎり、無線位置決定機能(WPF)18(図7)を使用して任意の時間に確実なCDMA無線通信装置の位置が決定されることを可能にする。WPFは入力および出力ポートと処理回路を備えている。当業者は、処理回路が汎用コンピュータ、マイクロプロセッサ、マイクロコンピュータ、専用状態マシン、専用のディスクリートなハードウエア回路、用途特定集積回路(ASIC)、またはWPFが行われることにより実行される機能を有する任意のその他の回路でよいことを理解するであろう。
【0044】
無線通信装置の位置を決定する処理は、無線通信装置20、ネットワーク、あるいは、内部位置アプリケーション(ILA)17、外部位置アプリケーション(ELA)15、緊急サービスアプリケーション(ESA)13のような外部エンティテイによって開始されることができる。これらのコンポーネント13,15,17は位置情報をリクエストおよび、または受信することのできるハードウエアまたはソフトウエアのいずれであってもよい。1実施形態では、ILA17はBSC14に結合された端末であり、無線通信装置20に関する位置情報を直接リクエストし、受信することができる。別の例ではILA17はMSC12内のプロセッサによって実行されるソフトウエアアプリケーションである。
【0045】
WPF18は粗データを受取ることのできる通常のプログラム可能なプロセッサであることが好ましく、それは無線通信装置および衛星から受信され(すなわち2つの衛星からの擬似距離、無線通信装置から基地局までの距離、および時間補正係数)、無線通信装置の位置が計算される。しかしながら、そのような受信された情報に基づいて無線通信装置20の位置を計算することを要求されたににを受信し、この位置決定を出力することのできる任意の装置が使用されることができる。例えば、WPF18は、ASIC、ディスクリートな論理回路、状態マシン、または他のネットワーク装置(BSC14のような)内のソフトウエアアアプリケーションとして構成されてもよい。さらに、WPF18は基地局10、BSC14、またはMSC12内のどこかに位置されてもよい。WPF18はBSC14と通信している専用のプロセッサによって実行されるソフトウエアアアプリケーションであることが好ましい。したがって、基地局10、BSC14、およびMSC12は通常のコンポーネントを開示された方法および装置に備えるために大きく変形される必要はない。その代わりに、WPF18はBSC14内のプロセッサによって行われるソフトウエアアアプリケーションである。WPF18は通常の料金請求機能、管理機能、家庭位置登録/訪問者位置登録機能、およびその他の通常のBSCに結合されたプロセッサにより行われる補助機能により使用されるのと類似した通信ポートを介してBSC14と通信することが好ましい。
【0046】
位置計算に使用されるアルゴリズムはParkinson.B.W.およびSpilker,J.J.著クローバル位置決定システム、理論および応用、ボリュームI、1996年に記載されている。さらに、ボリュームIIには微分GPS補正を行う方法が示されている。このような補正が無線通信装置の位置を正確に計算するためにWPF18によって行われなければならないことは当業者に理解されるであろう。
【0047】
開示された方法および装置によれば、サービスプロバイダは、能力、セキュリティ、サービスプロフィール等のようないくつかの条件に基づいて位置決定サービスを限定することができる。位置決定サービスは以下のサービスのそれぞれ、またはいくつかのサブセットを支援することができる。
(1)無線通信装置の発生する位置決定のリクエスト(WPF)
(2)ネットワークの発生する位置決定のリクエスト(NRF)
(3)サービスインスタンス当たり許容される位置決定(PSI)、無線通信装置は特定のサービスを配送する目的で装置の位置決定を一時的に許可する外部アプリケーションを与える。
(4)無線通信装置識別子を有する/有しない位置決定(PWI/PWO):定められた地理的区域中の全ての無線通信装置の位置決定を行う。PWIは識別子およびPWOがそれらの位置だけを与える間におけるこれらの装置の位置を与える。
(5)閉じられたグループ内の位置決定(PCG):位置決定のための特別の権利が定められることができる範囲のグループの生成のを許容する。
【0048】
[表I 位置決定サービスのタイプ]
開始者/周期性 オンディマンド 周期性 イベント
(単一/多数例) トリガー
無線通信装置 WPF,PSI, WPF,PCG, WPF
PCG
ネットワーク PWO PWO NRP/PWO
外 部 PWO,PWI, PWO,PWI,
PCG,PSI PCG
本発明の方法および装置の1実施形態によれば、無線通信装置20はその無線通信装置20の位置の決定のためのリクエストを発生し、無線通信装置20は位置リクエストをMSC12に送る。MSC12はリクエストを確認し、無線通信装置20がリクエストされたサービスのタイプに同意することを確実にする。その後、MSC12は無線通信装置20の位置を発見するためにサービスしているBSC14にリクエストを送る。BSC14はサービスしている基地局10に目標指向情報の位置を質問する。サービスしている基地局10は次の信号を送ることによってリクエストに応答する。
(1)観察している衛星のリスト
(2)それらのドップラシフト
(3)それらのドップラの変化率
(4)それらの擬似レンジ
(5)それらの高低角
(6)それらの信号対雑音比(SNR)
(7)基地局と無線通信装置との間で送信された信号の受ける遅延量が決定できる指示(例えば無線通信装置とサービスしている基地局との間の往復遅延RTD)。
【0049】
基地局と無線通信装置との間で送信された信号の受ける遅延量を決定するために使用される指示は、基地局から無線通信装置に送られて、無線通信装置から基地局に送り返され、あるいは無線通信装置から基地局に送られて、基地局から無線通信装置に送り返される往復伝送で受ける往復遅延であってもよい。この計算は、信号が往復の原点から送信される時間を記録し、往復の反対端でその信号を再送信することを要求された時間量を知り、再送信された信号が受信される時間を記録することにより行われる。基地局が信号を発生し、往復遅延の測定が行われるならば、基地局は以下の動作を行うことができる。
(1)無線通信装置が基地局と無線通信装置との間の(往復遅延等の)片道の遅延を計算することができる情報の送信
(2)基地局から無線通信装置への片道の遅延量の計算(折返し時間は無線通信装置の信号の受信間では無視できるか折り返し時間で情報を受信するかのいずれかであると仮定する)および無線通信装置に対する片道遅延の送信。
【0050】
同様に、無線通信装置が信号を発生して往復遅延の測定を行ったならば、無線通信装置は以下の動作を行うことができる。
(1)基地局における受信と再送信との間の時間量が無視できると仮定して、測定された往復遅延から直接片道遅延を計算する。
(2)無線通信システムが片道遅延を計算することができる無線通信装置から受信された信号の受信と再送信との間の経過時間がどの程度かについての基地局からの指示を受信する。あるいは、
(3)片道遅延を計算する基地局に記録された往復遅延を送り返し、無線通信装置に片道遅延を指示する値を送信する。
【0051】
本発明の方法および装置の1実施形態によれば、基地局と無線通信装置20との間の往復遅延は、基地局から送信された信号についてのフレームの開始端と無線通信装置20からの基地局によって受信された信号についてのフレームの開始端との間の差として決定される。これはCSM(セルサイトモデム)により測定された第1の到着フィンガのフィンガオフセット遅延として知られている。往復遅延は以下の合計であることに注意すべきである。
(1)順方向リンク(基地局伝送チェイン)のハードウエア遅延
(2)基地局アンテナと無線通信装置アンテナとの間の片道伝搬
(3)無線通信装置(受信および送信チェイン)内のハードウエア遅延
(4)無線通信装置のアンテナと基地局アンテナとの間の片道遅延。
【0052】
通信工業会/電子工業会(TIA/EIA)により公表された通信工業標準規格IS-95 によれば、無線通信装置は,無線通信装置20により送信された信号のフレームの前端が無線通信装置20により受信されたフレームの前端と整列するようなそれ自身のハードウエア遅延を補償するようにその送信タイミングを調節しなければならない。したがって項目(3)におけるハードウエア遅延は許容可能な公差内になるように自動的に除去される。
【0053】
項目(1)における遅延は約50ナノ秒の正確さで較正されることができる。したがって視線状態下で、RTD測定は無線通信装置20と基地局10の間の距離を決定するために使用されることができる。
【0054】
基地局10内のGPS受信機74は連続的に視野にある衛星を追跡し、したがって衛星に関するパラメータについて情報を更新することができることに注意すべきである。BSC14はRTD、擬似距離、衛星高低角、ドップラシフト、および各衛星に対するドップラ変化率を使用して、以下説明するように時間および周波数の両者においてサーチウインドウの中心およびサーチウインドウのサイズを計算する(図8参照)。
【0055】
時間ドメインにおいて、i番目の宇宙船(“SVi ”)に対するサーチウインドウの中心は図8におけるサービスしている基地局10とSVi との間の擬似距離ρbに等しい。SVi に対するサーチウインドウのサイズはd cos(φ)に等しく、ここで、dは基地局BSと無線通信装置(図8においてMSで表示されている)との間の往復遅延の半分に等しく、 cos(φ)は受信機を通過して地球の中心から発生する地球の半径に関する衛星の高度のコサインである。
【0056】
当業者は、基地局と衛星との間の距離が基地局と無線通信装置との間の距離に比較してはるかに大きいことを注目することによってこの関係を理解するであろう。したがって、衛星が本質的に頭上にあるとき、距離ρm1 ,ρb,およびρm2 は本質的に等しい。衛星の高低角がほぼ90度であるとき、ρm1 とρm2 との差はほぼ2dでありサーチウインドウサイズはほぼdである。
【0057】
本発明の方法および装置の1実施形態によれば、サーチウインドウの中心およびサイズは以下の情報によってさらに精密にされる。
(1)無線通信装置の最近の位置に関する情報
(2)無線通信装置が信号を受信する他の基地局が存在する場合にそれらについての情報
(3)他の基地局から受信された信号の相対強度
(4)付加的な信号が無線通信装置によって受信されることができる他の基地局の相対的な位置
(5)セクター化された基地局から送信された無線通信装置により受信された信号か否か、イエスであれば信号が送信されるセクターについての情報
(6)任意の基地局を含み、そのような送信された信号に関する到着時間または到着時間差情報のいずれかにより任意のソースから送信された信号を使用する無線通信装置の位置の三角測量の試み。
【0058】
周波数ドメインでは、SVi に対するサーチウインドウ中心はf0 +fdiに等しく、ここで、f0 はGPS信号の搬送波周波数に等しく、fdiはSVi により送信された信号のドップラシフトに等しい。SVi に対するサーチウインドウサイズは受信機の周波数エラーおよびドップラの変化率による周波数の不確実性に等しい。BSC14は観察している衛星、時間および周波数の両者におけるサーチャのサーチウインドウ中心およびサイズ、および無線通信装置20の位置を決定するために必要な衛星の最小数を含む情報を送信する。
【0059】
1実施形態によると、無線通信装置20に対するメッセージは無線通信装置20における再同調信号をトリガーする。メッセージはまた、“アクション時間”(受信機が将来GPS受信機周波数に再同調する特定の時間)を有することができる。応答において、無線通信装置20はアクション時間に第1および第2のスイッチ106 および402 (図6)を付勢し、それによってGPS周波数に再同調する。デジタルIF ASIC 400はそのPN発生器(図示せず)をGPSモードに変化させ、全ての特定の衛星のサーチを開始する。
【0060】
一度無線通信装置20が最小数の必要な衛星を捕捉すると無線通信装置20内のGPSクロックに基づいて擬似レンジを計算し、通信システム周波数に再同調し、擬似レンジを第1の3個の衛星の測定された信号対雑音比および最近のCDMAパイロットサーチ結果と共に擬似レンジ結果をBSC14に送る。パイロットサーチ結果は、装置が3個の衛星を捕捉できず、サービスしている基地局と無線通信装置20との間に直接の視線通路が存在しない場合に必要である。それにもかかわらず、パイロットサーチ情報のような利用できる情報を使用して別の基地局のような他の装置からの往復遅延が計算されることにより、3個より少ない衛星が使用可能である。パイロットサーチ情報に基づいて往復遅延決定する技術は技術的によく知られている。
【0061】
BSC14はサービスしている基地局10の位置、対応する往復遅延測定、検討している衛星の空間的位置(固定された予め定められた基準原点)、および微分GPS補正と共に無線通信装置20により行われた擬似レンジ測定結果をWPF18に送り、そこで無線通信装置20の位置が計算される。BSC14により無線通信装置20から受信された擬似レンジはWPF18に送られ、無線通信装置20内のクロックに関係している。それ故、それらはエラーがある(すなわち、サービスしている基地局10と無線通信装置20との間の往復遅延によってバイアスされている)。図9は、WPF18がローカルクロックバイアスに対してどのように補正するかを示す説明図である。図9では、δ1 は基地局10から無線通信装置20に送信された信号またはその反対の信号の受信における擬似レンジ(往復遅延の半分)を表している。rm1 ,rm2 ,rm3 は無線通信装置から第1、第2、第3の選択されたGPS衛星60, 70, 80までの擬似レンジである。これらの測定は無線通信装置20中のローカルクロックに関して行われたものである。しかし、ローカルクロックはGPS時間からδ1 だけオフセットしているので、補正された擬似レンジは次のようになる。
ρ1 =ρm1 +δ1
ρ2 =ρm2 +δ1
ρ3 =ρm3 +δ1
WPF18は、上記3つの式、3個の衛星の位置(空間的)、サービス基地局の位置、および対応するRTD測定を使用して無線通信装置20の位置を計算する。RTDを知ることは真のGPS時間に関する無線通信装置のローカルクロックバイアスを正確にしることと等価であることに注目すべきである。すなわち、3つの衛星からの3つの距離(レンジ)方程式を解けば十分である。さらに、基地局と無線通信装置との間に直接の伝搬路が存在する場合には、3個の衛星は過剰決定解を与える。それはRTDは基地局に対するクロックオフセットと擬似レンジ測定の両者の決定に使用することができるからである。
【0062】
また、必要な最小数の衛星の数は、無線通信装置20と基地局10との間に直接視線接続が存在し、無線通信装置20と基地局10との間の距離が無線通信装置20と基地局10との間のRTDから直接決定されることができる場合には、2個に減少されることに注目すべきである。この数は他のパイロット(サイト)についての情報が利用できればさらに減少されることができる。例えば、もしも無線通信装置20が2以上の基地局と通信しており(例えばソフトハンドオフ)、それらのいずれも無線通信装置20と直接の視線を有していないならば、1より多くの往復遅延が計算されることができ、したがって2個の衛星は全て無線通信装置20の位置を決定するために必要とされる。すなわち、計算は5つの式に基づいて行われることができる(2つの式は2個の衛星に関連する2つの擬似レンジ測定に関係し、2つの式は2個の基地局RTD測定に関係し、1つの式は無線通信装置20内のローカルクロックが真のGPS時間に同期されることを可能にするサービスしている基地局に対するRTDに関係している)。これはGPS衛星が建物や樹木によって妨害去れ、陰になった場合のシナリオで非常に有効である。さらに、GPS衛星をサーチする時間を減少させる。WPF18はBSC14に計算された位置の情報を送り、BSC14はその計算された位置の情報をMSC12に送り、または直接無線通信装置20に送信する。
【0063】
別の基地局からのRTDを使用するのに加えて、本発明の方法および装置は、異なった基地局からのパイロットの間または基地局と衛星との間の到着時間差(TDOA)を使用して無線通信装置の位置決定を助けることができる。そのようなTDOAはGPS衛星からの衛星信号のTDOAに付加して使用される。そのような使用は少なくとも1つの基地局が利用可能である(すなわち、基地局がGPS時間に同期されている)とき、または2以上の同期されない基地局がある(すなわち、基地局が互いに同期されているがGPS時間には同期されていない)とき無線通信装置の位置を決定するのを助け、所望の数よりも少ない衛星を使用することができる。順方向リンク信号からのTDOA測定の使用はRTD情報のないときでも必要な衛星の数を減少させることを可能にする。
【0064】
以下は無線通信装置の位置を決定するのを助ける順方向リンク情報を使用する本発明の方法および装置のいくつかの実施形態を記載している。開示された装置は本質的に汎用プロセッサ、デジタル信号プロセッサ、専用回路、状態マシン、ASIC、またはその他の技術的に知られている開示された機能を行うことのできる回路であることを理解すべきである。
【0065】
無線通信装置の位置を決定するために、多数の未知数(例えば、装置のxyz座標および正確な時間)はこれらの未知数を含む式の数と一致しなければならない。以下の式はTDOA測定が行われる各信号対に対して書かれたものである(すなわち、各対は第1の基地局BS1 により送信された1つの信号および第2の基地局BS2 により送信された1つの信号からなっている)。
TDOAbs1,bs2,wcd =
【数1】

【0066】
ここで、TDOAbs1,bs2,wcd は無線通信装置(wcd)によって第1の基地局(bs1 )と第2の基地局(bs2 )から受信された信号の間のTDOAである。
Δtは各信号源により送信された信号を発生するために使用されたクロック間のオフセットであり、基地局bs1 とbs2 の内部BS遅延間の差である。
xbs1 は基地局bs1 の位置を決定するx座標であり;
xbs2 は基地局bs2 の位置を決定するx座標であり;
ybs1 は基地局bs1 の位置を決定するy座標であり;
ybs2 は基地局bs2 の位置を決定するy座標であり;
zbs1 は基地局bs1 の位置を決定するz座標であり;
zbs2 は基地局bs2 の位置を決定するz座標であり;
xwcd は無線通信装置の位置を決定するx座標であり;
ywcd は無線通信装置の位置を決定するy座標であり;
zwcd は無線通信装置の位置を決定するz座標である。
【0067】
上記の式に対して、未知数は無線通信装置のx,y,zとΔtである。同様の式は衛星TDOA測定に対しても記載されることができる。4つの未知数が存在するから、このような4つの式がなければならず、Δtが衛星と基地局の両者に対して一定であると仮定して、少なくとも4個の衛星または基地局の任意の組合わせが必要である。この仮定が正しくない場合には(すなわち、基地局がGPS時間に同期していない場合)、1つの付加的な未知数が追加され、そのため1つの付加的な信号源が必要になる。さらに、基地局とGPSシステムが同期していない場合には、衛星と基地局の両者を使用するためには少なくとも2つの衛星と少なくとも2つの基地局がなければならない。
【0068】
もしも、通信基地局が互いに関して同期して動作しているならば、互いのパイロットに関する各パイロットのTDOAは上記の式を使用して決定されることができる。もしも、基地局もまたCDMA通信の基地局の場合のようにGPS時間にも同期しているならば、順方向リンクパイロットTDOAおよび衛星TDOAを使用する方法はそれら両者がGPS時間に同期しており、“同期GPS/順方向リンクモード”とここで呼ばれる。
【0069】
通信基地局がGPS時間と同期していない場合には、順方向リンクTDOAおよび衛星TDOAの両者を使用する方法はここでは“非同期GPS/順方向リンクモード”と呼ばれる。この場合には用語“非同期”とは順方向リンクにおける到着時間測定を行うために使用された時間基準とGPS衛星信号における到着時間測定を行うために使用された時間基準との到着時間のオフセットが存在することを示している。用語“非同期”は、基地局が互いに同期していないことを伝えようとするものでも、GPS衛星が互いに同期していないことを伝えようとするものでもないことを理解すべきである。事実、各基地局は各他の基地局と同期されることが好ましく、それによって基地局から受信された各信号の到着時間差が各他の基地局に関して決定されることができる。同様に、各衛星はGPS星座において他の衛星と同期している。
【0070】
図のA〜Dを参照すると、3個の衛星10a,10b,10cによって送信されたパイロットPNシーケンス間のタイミングが論じられている。ここに開示された方法および装置は本質的にCDMAシステムに関して記載されているが、非同期GPS/順方向リンクモードは、時分割多重アクセス(TDMA)通信システムのようなGPS時間と関係しない同期通信システムにより使用されるとき最も有効である。
【0071】
[同期GPS/順方向リンクモード]
図10は3つの基地局から送信されたパイロットPNシーケンス間の関係を示している。図10は3つのパイロットPNシーケンス901, 903, 905 を示しており、各パイロットPNシーケンスは1から9までの番号を付けた9個のチップを有している。1つのチップはここでは擬似レンジランダム雑音シーケンス内の最少の情報単位として定義される。各チップは典型的に2進(または論理)値(すなわち1または0のいずれか)を有している。
【0072】
パイロットPNシーケンスはこの明細書では長さNを有するシーケンスとして定義され、それはN個のチップ(例えば示された例ではN=9チップ)毎に反復されるが、それはN個の連続するチップのシーケンスでランダムで現れる。当業者は、CDMA基地局により送信されるパイロットPNシーケンスは典型的に215程度の長さのチップであることを理解するであろう。しかしながら、本発明の説明を簡単にし、図を明瞭にするために図10に示されたパイロットPNシーケンスは僅か9チップの長さとして示されている。
【0073】
図10は3つの基地局10a,10b,10cの制御プロセッサ62によって発生された3つのパイロットPNシーケンス901, 903, 905 を示している。各基地局10は1つのこのようなパイロットシーケンスを発生する。CDMA通信システム内の各基地局10は、同じパイロットPNシーケンスを送信する。しかしながら、各基地局10b,10cにより発生されたパイロットPNシーケンスの最初は制御プロセッサ62によって予め定められた量だけ意図的にオフセットされている。これについて議論において、基地局10a内の制御プロセッサ62は“ゼロPNシーケンス”を送信する。ゼロPNシーケンスは他のそれぞれのパイロットPNシーケンスがオフセットされる基準である。したがって、ゼロPNシーケンスを生成する制御プロセッサ62はゼロのオフセットを導入する(したがってゼロPNシーケンスと呼ばれる)。ここに開示された方法および装置は任意の特定の基地局によってゼロPNシーケンスを発生させる必要はないことに注意しなければならない。ゼロPNシーケンスは単に説明のために示したものである。当業者は、通常のCDMA通信システムでは各パイロットPNシーケンスオフセットと各基地局との間に1対1の対応があることを理解すべきである。すなわち、各基地局は特有のオフセットを割当てられ、その1つのオフセットだけを有するパイロットPNシーケンスを発生する。
【0074】
各基地局10b,10cの制御プロセッサ62により意図的に導入されたオフセットは、整数のチップを送信するために必要時間量に等しい期間を有していることが好ましい。このオフセットは通信システム中の各基地局に特有である。図10に示された例では、ゼロPNシーケンス901 は基地局10aの制御プロセッサ62内において、時間T0 で始まり、時間Tend で繰返しが始まるように発生される。CDMA通信システムでは時間T0 とTend はGPS時間に関して予め定められた時間である。パイロットPNシーケンスは固定長であり、反復されるから、パイロットPNシーケンスの開始はGPS時間に関して規則的な予測可能なインターバルで発生する。
【0075】
第1のこのようなパイロットPNシーケンス901 はゼロPNシーケンスでありタイミング基準として使用される。第2のこのようなパイロットPNシーケンス903 は時間T1 で開始し、ゼロPNシーケンスから8チップだけオフセットされている。したがって、ゼロPNシーケンス901 を発生する基地局10aがパイロットPNシーケンス901 の第1のチップ907 を発生するとき、パイロットPNシーケンス903 を発生する基地局10bは第9のチップ909 を発生する。パイロットPNシーケンス905 は時間T2 で開始し、ゼロPNシーケンスから3チップだけオフセットされている。それ故、ゼロPNシーケンスが第1のチップ907 を発生するとき、パイロットPNシーケンス905 を発生する基地局10cは第4のチップ911 を発生する。それ故、システム中の各基地局はシステム中の互いの基地局に関して同期したオフセットパイロットPNシーケンスを発生することができる。ゼロシーケンスが開始する時間を知らなくても、各信号が発生される時間にパイロットPNシーケンス903 とパイロットPNシーケンス905 との間のオフセット4チップであることが決定されることができる。
【0076】
当業者は、真のGPS時間は、4個の衛星から受信されたGPS信号から基地局の位置に対する完全な解を計算することによってGPS受信機とプロセッサを有する任意の基地局内で得られることができることを理解するであろう。このような完全な解は技術的によく知られているように受信基地局10aの座標x,y,zとGPS時間tから得られる。さらに一般的に説明すると、GPS時間はN+1の衛星を使用して位置に対するN次元の解を計算することによって正確に決定されることができる。したがって、基地局10aはゼロPNシーケンス901 を真のGPS時間に関して特定された時間に開始させる。
【0077】
ゼロPNシーケンスが開始される絶対時間を知る必要はないことに注目すべきである。それは無線通信装置で受信された2つの信号の到着時間差は相対的な測定として決定されるからである。一度、無線通信装置が基地局から送信されているパイロット信号が受信されることができることを決定したならば、受信機は同じ基地局から送信された“同期”信号において送信された情報を復調することができる。同期”信号について復調された情報はパイロットPNシーケンスに適用されたPNオフセット(ゼロPNシーケンスに関して)を含んでいる。それ故、ゼロPNシーケンスはCDMA通信システム内の各基地局によって送信された各パイロットPNシーケンスの相対的タイミングを決定するための基準として機能する。
【0078】
しかしながら、各CDMAの基地局10a内の制御プロセッサ62がGPS時間と同期していても、送信している基地局10の通信アンテナ201 の放射中心に対して各パイロットPNシーケンス901 を送信するのに関連する伝搬遅延が存在する。伝送チェインを通るハードウエア遅延(以下“内部BS遅延”と呼ぶ)は、パイロットPNシーケンスが真のGPS時間(すなわち、制御プロセッサ62においてパイロットPNシーケンスが開始する時間)に関して開始する時間と、アンテナ43の放射中心から送信の時間におけるパイロットPNシーケンスの開始時間との間にオフセットを導入する。内部BS遅延は各基地局10に対して異なっていてもよい。したがって、CDMA基地局は基地局の送信アンテナ43の放射中心においてGPS時間または相互に正確に同期してはいない。この不正確さは通信に問題を生じるような大きいものではないが、位置決定の目的に対して到着時間差を非常に正確に決定しようとするときには問題を生じる。
【0079】
図11は、内部BS遅延により生じたパイロットPNシーケンス901, 903, 905 の相対的なタイミングの影響を示している。第1のパイロットPNシーケンス901 は時間Ta から時間Tb に遅延されている。同様にパイロットPNシーケンス903 は時間Ta から時間Td に遅延されている。パイロットPNシーケンス905 は時間Ta から時間Tc に遅延されている。図11から認められるように、パイロットPNシーケンス903 および905 は、各基地局10を通るBS遅延の差によってそれぞれパイロットPNシーケンス901 に関して時間S1 =Tb −Td およびS2 =Tb −Tc だけシフトされている。相対的オフセットS1 ,S2 は無線通信装置20において3つの基地局10から受信された3つのパイロット信号209, 211, 213 のTDOAを正確に決定するために知られていなければならない。
【0080】
各基地局10の内部BS遅延も、相対的オフセットSも典型的に時間にわたってあまり大きく変化しない。したがって、本発明の1実施形態では、各基地局10の内部BS遅延と典型的に相対的オフセットSとのいずれも,基地局が任命されている時間における測定することができる。その代わりに、内部BS遅延または相対的オフセットSは規則的なインターバルで決定され、無線通信装置に通報される。さらに別の実施形態では、内部BS遅延または相対的オフセットSは連続的に決定され、規則的なインターバルで要求に応じて、あるいは値の変化に応じて無線通信装置に通報される。
【0081】
CDMA基地局(またはGPS時間に同期された他のシステムからの基地局)間の内部BS遅延および相対的オフセットを測定する1つの方法は、基地局10からパイロットPNシーケンスを受信するために既知の距離離れてい位置している(すなわち、基地局のアンテナから遠隔の同期しているステーションまでの既知の伝搬遅延を有する)遠隔の同期ステーションを使用することである。図12は、複数の基地局10a,10b,10cから既知の距離離れてい位置している遠隔の同期しているそのようなステーション1101の簡単化されたブロック図である。遠隔の同期ステーション1101は、クロック装置1103、受信機1105、送信機1107、および処理回路1109を備えている。基地局10a,10b,10cおよび遠隔の同期ステーション1101間の距離は固定されているから、2以上の基地局から信号を受信することのできて既知の位置で動作することのできるそのような遠隔の同期ステーションは基地局間のオフセットを決定するために使用されることができる。既知の位置で信号源から来る信号の到着時間差は既知の位置にある遠隔の同期ステーション1101に対して容易に決定されることができるから、遠隔の同期ステーション1101は予期された到着時間差と測定された到着時間差との差を決定することができる。
【0082】
その代わりに、遠隔の同期ステーション1101がGPS受信機を有している場合には、以下のようにして誘導された遅延量を決定することができる。基地局はまた信号が基地局10内の制御プロセッサ62で発生された時間を決定することができる。それはこの基地局はGPS時間に関して予め定められた時間にパイロットPNシーケンスを発生するからである。
【0083】
図13は、既知の距離にあるまたは既知の伝送遅延で信号が送信されることのできる遠隔同期ステーション1101を使用して基地局の制御プロセッサ62と送信アンテナ43の放射中心との間に導入された遅延量を決定するために使用される方法を示している。示されているように、パイロットPNシーケンスは最初に時間t1 において発生される。パイロットPNシーケンスは基地局を介して送信アンテナ43の放射中心に送られ、時間t2 に送信を開始する。その後、パイロットPNシーケンスは空中を遠隔同期ステーションに送信され、そこで時間t3 において受信される。したがって、真のGPS時間に関して両方の時間t1 とt3 は知られているから、制御プロセッサ62から遠隔同期ステーション1101に伝搬するパイロットPNシーケンスに必要な時間の長さは知られている。さらに、送信アンテナから遠隔同期ステーション1101に伝搬する信号に対して必要な時間の長さ(すなわち、時間t2 とt3 の間の差)も知られているから、信号により伝搬された距離および、または通路は測定され、決定されることができる。
【0084】
時間t2 とt3 の間の差を決定する1つの方法は、往復遅延を測定することである。例えば、信号を受信する無線通信装置は基地局10と電話装置との間の往復遅延を与えるように構成された通常の無線移動体電話装置である。その代わりに、基地局10は基地局10と無線通信装置20との間の往復遅延を決定することのできる通常の基地局でもよい。当業者は、これらの基地局10と無線通信装置との間で生じる伝搬遅延を決定するいくつかの方法が存在することを理解するであろう。いくつかのよく知られた技術がこの測定を行うために使用されることができる。当業者は、遠隔同期ステーション1101が通常の無線電話装置であり、同期機能を行うために特別に設計された試験装置のピース、または他の基地局のようなここに記載された機能を実行するように構成されることのできる他の受信機であってもよいことを理解するであろう。
【0085】
一度、これらの値が知られると、時間t1 とt2 との間の時間差は、t1 とt3 の差からt2 とt3 の間の差を減算することによって計算され、その結果としてt1 とt2 との間の時間が得られる。
【0086】
図14は、基地局に対するTDOAが同期GPS/順方向リンクモードにしたがって計算される方法を示している。図14に示されているように、3つの基地局10a,10b,10cのそれぞれは同じ時間T1 にパイロットPNシーケンスを発生する。しかしながら、各基地局10a,10b,10cは異なった内部BS遅延を有している。したがって、第1の基地局10aは時間T3 にその基地局10aによって発生されたパイロットPNシーケンスを送信し、第2の基地局10aは時間T2 にその基地局10aにおいて発生されたパイロットPNシーケンスを送信し、第3の基地局10cは時間T4 にその基地局10cによって発生されたパイロットPNシーケンスを送信する。各基地局10内の内部BS遅延は上述のようにして決定される。一度決定されると、内部BS遅延は、記憶されるか、または無線通信装置に通知される。
【0087】
一度、3つのパイロットPNシーケンスがそれぞれ基地局10の1つに関連して送信されると、送信している基地局10の送信アンテナ43の放射中心から空中を通り、受信無線通信装置20に送られてそれぞれ異なった伝搬遅延を受ける。例えば基地局10aと10bとの間のTDOAは時間T6 とT7 との間の差であるように現れる。しかしながら到着時間差は空気中を通って伝搬する信号に対して必要な時間の差のみを測定しなければならないから、制御プロセッサ62から送信アンテナ43の放射中心までのパイロットPNシーケンスの伝送で受ける内部BS遅延の差によって導入されるエラーを考慮する必要がある。これは時間T5 ,T6 ,T7 から既知の内部BS遅延を減算することによって行われることができ、結果として時間T8 ,T9 ,T10が得られる。したがって補正されたTDOAはこれら3つの時間T8 ,T9 ,T10の各対間の差である。さらに、内部BS遅延の減算は各基地局をGPS時間と同期させる。それ故、各GPS衛星はGPS時間と同期され、基地局信号の到着時間および衛星信号の到着時間は、技術でよく知られているように、最少2乗平均TDOAで使用されることのできるTDOA値を形成するために共に使用されることができる。衛星信号と基地局信号は同期しているから、基地局と衛星から送信されたパイロットPNシーケンス間の関係は知られていることは当業者に理解されるであろう。したがって、信号が基地局と衛星のいずれかから送信された正確な時間を知らないで、衛星信号が送信された時間に関して基地局信号が送信された時間を知ることができる。それ故、到着時間差は、基地局または衛星のいずれかから受信された他の信号から基地局または衛星のいずれかからの任意の信号の到着時間を減算することによって正確に決定することができる。
【0088】
[非同期GPS/順方向リンクモード]
同期GPS/順方向リンクモードの場合と同様に、非同期GPS/順方向リンクモードは、全ての基地局が互いに同期していると仮定する。しかしながら、非同期モードでは、順方向リンクで受信された信号の到着時間は同期GPS/順方向リンクモードのようにGPS信号の到着時間と組合わせて意味のあるTDOA測定を発生することはできない。むしろ、基地局からの受信された信号の到着時間は他の基地局から受信された信号の到着時間とだけ組合わされてTDOA測定が行われる。同様に、GPS衛星から受信された信号の到着時間はTDOA測定を形成するように他の衛星から受信された信号の到着時間だけと組合わせることができる。
【0089】
それにもかかわらず、無線通信装置がN個の基地局(ここでNは2以上)から信号を受信できる場合には、必要な全ては4−N−1からの信号である。受信されることのできる付加的な衛星は過剰決定解を与え、したがってさらに信頼性の高い正確な解が得られる。本明細書の開示から当業者には2以上の非同期システムが4−(N1 −N2 …NX )−Xに対して必要とされる衛星の数を減少させるために組合わされてもよいことは明白であろう。その場合には衛星システムに加えてXのシステムがあり、各システムは少なくとも1つの基地局を有し、それは無線通信装置により受信され、N個の基地局はシステムxに対して受信されることができる。
【0090】
さらに、基地局がGPS時間に同期しないという事実のために、非同期GPS/順方向リンクモードにおける内部BS遅延間の差を決定する手順は同期GPS/順方向リンクモードにおいて使用された手順と異なっている。非同期GPS/順方向リンクモードの場合には、受信機は通信システム内の基地局の2以上のものから信号を受信する。2つの基地局の各対から送信された信号間のTDOAが知られているために、受信機は既知の位置に配置される。したがって、TDOAの既知の値と測定されたTDOAの値との差は内部BS遅延(および基地局間の任意のクロックオフセット)における差に等しい。基地局の各対に対してそのような測定が行われる。これらの差は無線通信装置20中に記憶され、または通知され、TDOA値が計算されるとき考慮される。その代わりに、これらの差は、無線通信装置20からのTDOA測定値が送られるWPF18中に記憶されるか通知される。その場合には、WPF18は基地局間の同期中のエラーを考慮に入れてTDOAを補正する。計算された値が通知されたならば、それらは新しい基地局が委任されたときに規則的に要求に応じて、または値の変化したときに通知されてもよい。
【0091】
ここで説明したGPS/順方向リンクモードは“擬似レンジ衛星”として各基地局を取扱っている。擬似レンジ衛星は衛星と同期した信号を送信し、衛星によるTDOA測定で使用されることができる装置として定義される。WPF18は、基地局の位置、アンテナの高さ、アンテナの特性(アンテナパターンおよび利得)、セクタの数、セクタの方位、各セクタに対するクロックエラーのような基地局の構成を含む基地局のアルマナックを記憶している。このようにして、位置決定システムは共通の時間基準(すなわち受信された全ての信号に対する基準としてGPS時間)を有するように無線通信装置により受信された全ての信号を考慮する。ここで開示された方法および装置は、それらが利用可能であれば順方向および逆方向リンクの両者の測定を使用してもよい。すなわち、無線通信装置により送信された信号に基づいて複数の基地局において同様の測定が行われ、無線通信装置によって受信された信号の代わりにまたはそれに付加して使用されることができる。同じ技術が適用できるであろう。しかしながら、情報の到着時間は共通の位置に送信されなければならず、そのため無線通信装置から送信された信号の各基地局における相対的な到着時間の差は決定可能である。
【0092】
ここに開示された方法および装置は特定の応用に対する特定の実施形態を参照にして説明された。当業者は本発明の技術的範囲内に含まれる付加的な変形、応用、および実施形態を認識するであろう。したがって、本発明の請求の範囲はこのような応用、変形および実施形態の全てをカバーすることを意図している。
【技術分野】
【0001】
本発明は、通信システムに関する。特に、本発明は、コード分割多元アクセスシステムにおいて無線通信装置の位置を決定するシステムおよび技術に関する。
【背景技術】
【0002】
無線ネットワークにおける位置決定技術の展開は調整力によって駆動され、1つのキャリアにより提供されたサービスを別のものにより提供されたサービスと区別することにより歳入を増加するためにキャリアの望んでいることである。さらに1996年6月の米国連邦通信委員会(FCC)は強化された緊急911(E-911)サービスに対する支援を命令している。命令のフェーズIではセクターおよびセル情報はPSAP(公共安全回答ポイント)機関に送返すことを要求している。命令のフェーズIIではセルラトランシーバの位置はPSAPに送返すことを要求している。FCCの命令にしたがうために、全体で77,000のサイトは2005年までに自動位置決定技術を備えなければならない。
【0003】
多くの技術が自動的位置決定能力を与えるために考えられている。1つの技術では多数のセルサイトからの信号の到着時間の差を測定することを含んでいる。これらの信号は三角測量で位置情報を抽出する。残念ながら、この技術は有効にするためには高いセル密度および、またはサイトの送信パワーの増加を必要とする。これは典型的なCDMAシステムでは、各電話機は最も近いセルサイトに到着するのに十分な程度の信号電力しか送信されないことによるものである。三角測量はすくなくとも3つのサイトと通信する必要があり、セルサイトの密度が増加されるか、または各無線通信装置の信号パワーが増加されなければならない。
【0004】
いずれにせよ、各方法にはそれぞれ欠点がある。セルサイト数の増加はコストがかかりすぎる。信号パワーの増加は各無線通信装置の重量とコストを増加させねばかりでなく、無線ユーザ間の干渉の可能性を増加させる。さらに、ネットワーク三角測量法はFCCの命令の要求には合致しない。
【0005】
別の方法はセルラ電話に対するGPS(グローバル位置決定システム)機能性の付加を含む。この方法は視線にある4個の衛星を必要するために無線通信装置にかなりのコストおよび重量を付加し、動作も遅いが、それにもかかわらず位置決定サービスに対しては最も正確な方法である。
【0006】
処理の速度を増加させるための、第3の方法では、無線通信装置がGPS搬送波に対して周波数を見なければならないことを示す目標指向(aim) 情報を無線通信装置に送る方法である。大抵のGPS受信機は、可視の衛星からの信号に対して周波数ドメインで受信機により行われるサーチを最小にするためにGPS衛星アルマナック(almanac)として知られているものを使用する。このアルマナックは粗いエフェメリス(ephemeris)の15,000ビットブロックであり、全体の星座の時間モデルデータである。衛星の位置に関するアルマナックの情報および現在の1日の時間は近似的にそれだけである。アルマナックなしには、GPS受信機は衛星信号を捕捉するために最大の広い範囲の可能性のある周波数のサーチを行わなければならない。付加的な処理は、他の衛星を捕捉することを目的としている付加的な情報を得るために必要である。
【0007】
信号捕捉処理はサーチされる必要がある多数の周波数ビンのために数分を必要とする。各周波数ビンは中心周波数と予め定められた帯域幅を有している。アルマナックの利用性は衛星のドップラにおける不確実性を減少させ、それ故、サーチされるビンの数は減少する。
【0008】
衛星のアルマナックはGPSナビゲーションメッセージから抽出され、あるいは受信機に対するデータまたはシグナリングメッセージとしてダウン(順方向)リンクで送信されることができる。この情報を受信するとき、受信機はGPS信号の処理を行ってその位置を決定する。この方法は多少迅速であるが、視線にある4個以上の衛星を必要とする。これは都市環境では問題を生じる可能性がある。
【0009】
したがって、セルラの位置決定のための迅速で、正確で、廉価なシステムの技術的な必要性が存在している。
【発明の概要】
【0010】
この技術的な必要性は本発明により開示された無線トランシーバの位置を決定するシステムおよび方法によって解決される。最も一般的な意味において、本発明の方法は、地球上のシステムからの距離情報と、無線通信装置からのタイミング情報と、GPS衛星からの距離情報とを使用して位置を決定するハイブリッド方法である。この情報は組合わされて無線通信装置の位置を迅速に確実に決定することを可能にする。開示された方法は、無線通信装置において、第1のGPS衛星から送信された第1の信号と、第2のGPS衛星から送信された第2の信号と、第3のGPS衛星から送信された第3の信号とを受信するステップを含んでいる。無線通信装置はこれらのGPS信号を受信して、それに応答して基地局に第4の信号を送信するように構成されている。基地局は第4の信号を受信し、基地局と無線通信装置との間の往復遅延によって第4の信号に与えられたクロックバイアスに対して補正し、バイアスされない第4の信号を使用して無線通信装置の位置を計算する。
【0011】
特定の構成において、基地局は無線通信装置に目標指向情報を送信する。目標指向情報は無線通信装置によって使用され、第1、第2、第3の衛星によって送信された信号を迅速に捕捉する。目標指向情報は無線通信装置をサービスする基地局トランシーバサブシステム(BTS)、基地局制御装置(BSC)またはその他のエンティティにおいて集められた情報から導出され、(1)衛星識別子情報と、(2)ドップラシフトまたは関連する情報と、(3)基地局と各衛星との間の距離を示す値と、(4)各衛星に関連するサーチウインドウサイズを含んでおり、サーチウインドウサイズは無線通信装置と基地局との間の往復遅延と各衛星の高低角とに基づいて計算される。
【0012】
第1、第2、第3の衛星によって送信された信号を無線通信装置で捕捉したとき、無線通信装置は無線通信装置と第1の衛星との間の距離pm1 と、無線通信装置と第2の衛星との間の距離pm2 と、無線通信装置と第3の衛星との間の距離pm3 とを計算する。この距離情報は、測定が行われた時間に関する情報と共に基地局に送り返される。CDMA構成においては、基地局アンテナと無線通信装置アンテナとの間の信号の伝搬に要した時間は往復遅延時間の半分であり、基地局によって知られている。無線通信装置と基地局との間の往復遅延の測定値は無線通信装置と基地局との間の距離を示している。さらに、この遅延は無線通信装置の絶対時間を補正する手段を与える。
【0013】
基地局制御装置またはセルラインフラストラクチャに関連するその他のエンティティのような無線通信装置の外部の装置は、サービス基地局に対して知られている情報を利用して無線通信装置の位置を計算する。このような情報には、無線通信装置に関する第1、第2、第3の衛星の位置および無線通信装置と基地局との間の距離が含まれている。無線通信装置の位置の決定は、(1)第1の衛星を囲む第1の球の半径cp1 と、(2)第2の衛星を囲む第2の球の半径cp2 と、(3)第3の衛星を囲む第3の球の半径cp3 と、(4)基地局を囲む第4の球の半径cpbとを発見することによって行われる。“c”は光の速度であり、“p1 ”は第1の衛星と無線通信装置に関連する擬似レンジであり、“p2 ”は第2の衛星と無線通信装置に関連する擬似レンジであり、“p3 ”は第3の衛星と無線通信装置に関連する擬似レンジであり、“cpb”は基地局と無線通信装置に関連する擬似レンジである。
【0014】
視線(多通路ではない)が無線通信装置と基地局との間に存在する場合には、提案された方法は、2つの衛星と基地局との間の測定しか必要としない。CDMA通信システムのようなGPS時間に同期されている無線通信システムの場合には、基地局によって送信された信号から取出された擬似距離測定は、衛星の擬似距離測定からバイアスを除去するためと付加的な距離測定として使用される。他の基地局からの付加的な情報は、もし利用可能であれば、無線通信装置の位置を決定するために必要な衛星の数をさらに減少させるために使用されることができる。2次元の位置しか必要のない場合には、1個の衛星と1個の基地局しか必要ではない。
【0015】
本発明が他の既知のGPS方法に比較して優れているの1つの重要な効果は、無線通信装置が擬似距離を決定することのできる速度である。サービスしている基地局トランシーバ、基地局制御装置、または基地局に結合されたその他のエンティティはその自分のGPS受信機を有しており、また、サービスしている基地局の位置に関して追跡されている全ての衛星の擬似レンジを知っているから、追跡している各衛星に対するサーチウインドウの中心およびサーチウインドウのサイズを決定することが可能である。情報は無線通信装置に送られ、サーチ処理の速度を増加させる。
【0016】
すなわち、各GPS衛星に搭載されたクロックは衛星による距離信号の放送のタイミングを制御する。このような各クロックはGPSシステムの時間に同期される。基地局はまたGPSシステムの時間に同期されたクロックを備えている。無線通信装置はそのクロックを基地局と無線通信装置との間の片道の遅延に対応した遅延によりGPS時間に同期する。タイミング情報は衛星距離信号内に埋込まれ、その衛星距離信号は信号が特定の衛星から送信された時点を無線通信装置が計算することを可能にする。信号が受信された時間を記録することによって、衛星から無線通信装置までの距離は計算することができる。その結果、無線通信装置の位置の軌跡は衛星の位置を中心とし、計算された距離に等しい半径の球面上にある。測定が2つの他の衛星の距離を使用して同時に行われたならば、無線通信装置3つの球面上のどこかにある。しかしながら、3つの球面は2点で交差し、それらの点の1つだけが正しい無線ユーザの位置である。候補となる位置は3つの衛星を含む平面に関して互いに鏡像の関係である。
【0017】
開示された方法および装置の1実施形態では、時間的に所定の点における無線通信装置の位置の決定のためのGPS衛星は基地局によって識別される。この情報は無線通信装置に転送されて無線通信装置によって行われるサーチ動作を容易にする。
【0018】
上記に加えて、無線通信装置が符号分割多元アクセス(CDMA)受信機であるとき、本発明の方法および装置は、CDMAが同期システムであることを利用できる。同期しているため、無線通信装置における基準パイロットの到着時間は時間基準として使用されることができる。したがって、無線通信装置は基準パイロットと、GPS信号と、その他のパイロットとの間の到着時間差を測定することができる。したがって、無線通信装置の位置の決定の問題は到着時間差(TDOA)の問題となり、結果的に無線通信装置の位置を決定するために必要な衛星の数をさらに減少させることができる。
【0019】
1実施形態では、無線通信装置は以下のようないくつかの動作モードを有することができる。
(1)無線システムインフラストラクチャとGPS衛星の両者からの情報を使用するハイブリットモード;
(2)独立型(標準的または通常の)GPSモード;
(3)目標指向独立型GPSモード;
(4)反転された微分GPSモード;
(5)目標指向および反転された微分GPSモード
【図面の簡単な説明】
【0020】
【図1】無線(CDMA)通信システムの基地局および無線通信装置の構成を示す概略図。
【図2】例示的なCDMAセルラ電話システムのブロック図。
【図3】第1、第2、および第3の基地局および無線通信装置の簡単化された構成のブロック図。
【図4】本発明により構成された基地局の簡単化された構成のブロック図。
【図5】本発明の無線CDMAトランシーバの位置を決定するための無線通信システムのブロック図。
【図6】本発明の無線通信装置の受信機、制御信号インターフェース、デジタルIF、および無線復調回路の一部分の例示的な構成を示すブロック図。
【図7】無線通信装置の位置を決定するための機能モデルの説明図。
【図8】時間ドメインにおけるサーチウインドウのサイズおよび中心の計算を示す説明図。
【図9】ローカルクロックバイアスの補正を示す説明図。
【図10】3つの基地局から送信されたパイロットPNシーケンスの間の関係を示す説明図。
【図11】3つの基地局から送信されたパイロットPNシーケンスの間の関係を示す説明図。
【図12】複数の基地局から既知の距離で離れて位置している遠隔同期局の簡単化されたブロック図。
【図13】基地局制御プロセッサと、既知の距離に位置する遠隔同期局を使用する送信アンテナの放射中心との間で導入される遅延、または信号が既知の伝送遅延で伝送される遅延量を決定するために使用される方法のの説明図。
【図14】基地局に対するTDOAが同期GPS/順方向リンクモードにしたがって計算される方法の説明図。
【詳細な説明】
【0021】
本発明の例示的な実施形態を添付図面を参照にして以下説明する。
本発明の方法および装置はここで特定の応用のための例示的な実施形態を参照にして説明されるが、本発明はそれに限定されないことを理解すべきである。当業者およびこの技術にアクセスする者は、本発明の技術的範囲内における付加的な変形、応用、および実施形態、ならびに本発明が顕著な利用性を示す付加的な分野を認識するであろう。
【0022】
図1は、無線通信装置20および無線CDMA通信システムの基地局10または衛星60, 70, 80, 90のような外部信号源の配置を示している。通信システムは建物40および地上の妨害物50により囲まれている。基地局10と無線通信装置20は複数のGPS衛星(その4個が衛星60, 70, 80, 90として示されている)を有するGPS(グローパル位置決定システム)環境中に配置されている。このようなGPS環境はよく知られている。例えば、Hofman-Wellenhof,B, 他、GPS理論および実用第2巻、ニューヨーク:Springer-Verlag Wien,1993 年参照。当業者はこの技術が、本発明の技術的範囲を逸脱することなくアドバンスモビール電話システム(AMPS)、移動体通信のためのグローパルシステム(GSM(登録商標))等のようなその他の通信システムに適用可能であることを認識するであろう。
【0023】
典型的なGPSアプリケーションにおいて、GPS受信機がその位置を決定するためには4以上の衛星が必要とされる。対照的に、ここに開示された方法および装置は、3つのGPS衛星しか使用しないで、無線通信装置とサービス基地局10のような外部信号源との間の往復遅延と、サービス基地局10の既知の位置とを使用して無線通信装置20の3次元位置を決定する。直接の視線が利用できる場合には、無線通信装置20の位置決定には2つのGPS衛星と、往復遅延と、サービス基地局10の既知の位置しか必要としない。この数はCDMAセルサイト通信システムの順方向リンクから、あるいは任意の他の同期セルラ通信システムからの情報の到着時間差を使用することによってさらに減少させることができる。この開示の目的に対して、セルラ通信システムは、無線通信装置がシステムの付近を移動するとき、無線通信装置が複数のセルの少なくとも1つの通信システムから信号を受信することを可能にする通信システムとして定義される。
【0024】
図2はCDMAセルラ電話システム30のブロック図である。このシステム30は基地局制御装置(BSC)14を有する移動体電話交換局(MSC)12を含んでいる。公共電話交換ネットワーク(PSTN)16は電話ラインからの呼およびMSC12との間の呼の経路を設定する。MSC12はPSTN16からの呼を第1のセル19と関連する発生源基地局10と第2のセル21と関連する目的地基地局11との間の経路を設定する。さらにMSC12は基地局10と11との間の呼の経路設定をする。発生源基地局10は通信路28により第1のセル19内の第1の無線通信装置20に呼を導く。通信路28は順方向リンク31と逆方向リンク32とを有する2方向リンクである。典型的に、基地局10が無線通信装置20と音声通信を設定するとき、通信路28はトラヒックチャンネルを含んでいる。各基地局10,11はただ1つのセルだけと関係しているが、基地局制御装置はしばしば複数のセルの基地局と関連し、それらを管理している。
【0025】
無線通信装置20が第1のセル19から第2のセル21へ移動するとき、無線通信装置20は第2のセル21と関係する基地局と通信を開始する。これは通常は目的基地局への“ハンドオフ”と呼ばれている。“ソフトハンドオフ”では、無線通信装置20は発生源基地局10との第1の通信リンク28に加えて、目的地基地局11との第2の通信リンク34を設定する。無線通信装置20が第2のセル21へ移動し、第2のセルとのリンクが設定された後、無線通信装置20は第1の通信リンク28をドロップしてもよい。
【0026】
ハードハンドオフでは、発生源基地局と目的地基地局の動作は典型的に大きく異なっており、発生源基地局との間の通信リンク34は目的地基地局へのリンクが設定される前にドロップされなければならない。例えば、発生源基地局が第1の周波数帯域を使用しているCDMAシステム内にあり、目的地基地局が第2の周波数帯域を使用している第2のCDMAシステム内にあるとき、無線通信装置は同時に両方の基地局とのリンクを維持することはできない。それは大抵の無線通信装置は同時に2つの異なった周波数帯域に同調することはできない。それは一方は送信周波数帯域であり、他方は受信周波数帯域であるからである。第1の無線通信装置20が第1のセル19から第2のセル21へ移動するとき、発生源基地局10に対するリンクがドロップされ、新しいリンクが目的地基地局との間に設定される。
【0027】
図3は、第1、第2、第3の基地局10A, 10B, 10C と無線通信装置20とを簡単化して示している。図3に示されるように、各基地局はGPSトランシーバ/タイムユニット203 、制御プロセッサ62のような処理回路、GPSアンテナ76,通信回路207 、通信アンテナ201 を備えている。当業者は、制御処理回路が汎用コンピュータ、マイクロプロセッサ、マイクロコンピュータ、専用状態マシン、専用のディスクリートなハードウエア回路、用途特定集積回路(ASIC)、または制御プロセッサにより行われるような記載されたような機能が可能な任意の他の回路であってもよいことを理解するであろう。図4は本発明の方法および装置により構成された基地局10をさらに詳細に示している。図4に示された実施形態では、基地局10は本質的に通常の構成である。別の実施形態では、基地局10は、以下の説明から明らかにされるように基地局が無線通信装置20の位置を決定することを可能にする付加的な機能を含んでいる。通信アンテナ201 はCDMA信号を受信するための受信CDMAアンテナ42とCDMA信号を送信する送信CDMAアンテナ43とを有している。アンテナ42で受信された信号は通信回路207 へ導かれる。通信回路207 は、通信受信機44、レート検出器61、スイッチ63、ボコーダ64、デジタル・アナログ変換器(D/A)65、送信機69、ボコーダ68、アナログ・デジタル変換器(A/D)66を具備している。受信機44はアンテナ42から直接信号を受信する。実際には、受信機44は、復調器、デインターリーバ、デコーダ、および当業者に知られているその他の回路を含んでいる。受信された信号はそれにレート検出器61が関係している適当なチャンネルに割当てられる。制御プロセッサ62はスピーチを検出するために検出された信号のレートを使用する。スピーチが受信されたフレーム中で検出された場合には、制御プロセッサ62は受信したフレームをスイッチ63によってボコーダ64に切換える。ボコーダ64は可変レートのコード化された信号をデコードしてそれに応答してデジタル化された出力信号を出力する。デジタル化されたボコードから戻された信号はデジタル・アナログ変換器65によってスピーチに変換され、スピーカ(図示せず)のような出力装置に与えられる。
【0028】
マイクロホンまたはその他の入力装置(図示せず)からの入力スピーチはアナログ・デジタル変換器66によってデジタル化され、ボコーダエンコーダ68によってボコードされる。ボコードされたスピーチは送信機69に入力される。実際には送信機69は、変調器、インターリーバ、およびエンコーダのような当業者によく知られた装置を含んでいる。送信機69の出力は送信アンテナ43に供給される。
【0029】
図4に示されるように、GPSトランシーバ/時間ユニット203 は受信機74とタイミングおよび周波数ユニット72を含んでいる。タイミングおよび周波数ユニット72はGPS受信機74のGPSエンジンから信号を受取り、その信号を使用してCDMAシステムの適切な動作のためのタイミングおよび周波数基準を発生する。したがって、多くのこのようなCDMAシステムでは、各セルサイトはGPS時間に同期される(すなわち、GPS時間ベース基準を使用してそれから時間クリチカルCDMA送信が導出される[パイロットPNシーケンス、フレームおよびウォルシュ関数を含んでいる])。このような通常のタイミングおよび周波数ユニットおよびGPSエンジンはCDMAシステムでは普通のものであり、技術的によく知られている。通常のタイミングおよび周波数ユニットは周波数パルスおよびタイミング情報を与える。対照的に、本発明で開示されているタイミングおよび周波数ユニット72は高低角、擬似レンジ、衛星識別子(すなわち、各衛星と関連する擬似雑音[PN]オフセット)、および衛星を捕捉する無線通信装置20を助けるために各衛星と関連するドップラシフトに関する情報(すなわち、衛星を捕捉するために必要な時間量を減少させる)を出力することが好ましい。この情報は典型的に通常のタイミングおよび周波数ユニット内で得られるが、典型的に外部装置では必要とされず、与えられることもない。タイミングおよび周波数ユニット72によって与えられる付加的な情報は、通常の基地局で周波数およびタイミング情報に関して行われているのと同じ方法でBSC14に通報されることが好ましい。
【0030】
図5は本発明の1実施形態による無線通信装置20のブロック図である。無線通信装置20は、CDMA送信ならびにGPS信号を受信するように構成された送受信両用アンテナ92を備えていることが好ましい、別の実施形態では別々のアンテナがGPS信号、CDMA信号、および別のシステムの信号のようなその他の信号を送信および受信するために使用される。アンテナ92はデュプレクサ94によって給電されることが好ましい。デュプレクサ94は受信機100 に信号を供給し、送信機200 によって信号を供給される。時間/周波数サブシステム102 は当業者に明らかなように受信機100 に対してアナログおよびデジタル基準信号を供給し、インターフェース300 および送信機200 に対して制御信号供給する。CDMAパワー制御は利得制御回路104 により行われる。本発明の1実施形態では制御信号インターフェース300 はデジタル信号プロセッサ(DSP)である。その代わりに、制御信号インターフェース300 は利得制御機能を行うことのできる別の回路でもよい。制御信号インターフェース300 は無線通信装置20に対して制御信号を与える。受信機100 は無線周波数(RF)の下方変換および第1段の中間周波数(IF)の下方変換を行う。デジタルIF用途特定集積回路(ASIC)400 は第2段の中間周波数のベースバンドへの下方変換、サンプリング、およびアナログ・デジタル変換を行う。移動体復調ASIC500 はデジタルIF ASIC 400をサーチしてそこからのデジタルベースバンドデータと相関して以下さらに詳細に説明するように擬似レンジを確実にする。
【0031】
任意の音声またはデータと共に、擬似レンジは移動体復調ASIC500 によってデジタルIF変調器ASIC 400に送られる。デジタルIF変調器ASIC 400は移動体復調ASIC500 から受信されたデータの第1段IFの上方変換を行う。これらの信号の第2段中間周波数上方変換および無線周波数上方変換は送信機の回路200 において行われる。その後これらの信号は基地局10に送信され、以下説明するように、本発明の方法にしたがって処理される。無線通信装置20により受信された擬似レンジのような無線通信装置20とBSC14との間で通信される位置情報は、無線通信装置20によってデータバーストタイプのメッセージにより基地局10に通報されることが好ましい。そのメッセージは通信工業会/電子工業会(TIA/EIA)により発行された工業標準規格TIA/EIA/IS-167によって規定されたショートメッセージサービス(SMS)のようなメッセージである。そのようなメッセージは基地局10を通ってBSC14に送信される。その代わりに新しく定められたバーストタイプのメッセージが無線通信装置20により基地局10に送信されることができる。
【0032】
図6は、本発明の無線通信装置20の受信機の一部分、制御信号インターフェース、デジタルIF、および移動体復調回路のブロック図である。無線通信装置20の送信機部分は通常の無線通信装置の送信機部分と本質的に同一であり、したがって、簡潔にするためにここでは説明しない。好ましい実施形態では、受信機100 は第1および第2の通路103 および105 を備えており、それらはアンテナ92にデュプレクサ94および第1のスイッチを介して接続されている。当業者は、2ウエフ通信装置とGPS受信機との間のさらに集積された構造が使用できることを認識するであろう。その代わりに、適当なインターフェースを有する2個の別々の受信機が開示されたものと同様の目的を達成することができる。
【0033】
第1の通路103 は受信されたCDMA信号を下方変換して通常のCDMARFの下方変換された出力信号を生成することができる。第1の通路103 は低雑音増幅器108 、第1のバンドパスフィルタ112 、第1のミキサ118 、および第2のバンドパスフィルタ126 を含んでいる。第2の通路105 は図1のGPS衛星60, 70, 80, 90からのGPS信号を下方変換する。第2の通路105 は第2の低雑音増幅器110 を備え、それは第3のバンドパスフィルタ114 に出力を供給する。バンドパスフィルタ114 の出力は第2のミキサ120 に入力される。第2のミキサ120 の出力は第4のバンドパスフィルタ128 に供給される。第1および第2のミキサは第1および第2の局部発振器122 および124 によって局部発振信号を供給されている。第1および第2の局部発振器122 および124 はデュアル位相ロックループ(PLL)116 の制御下で異なった周波数で動作する。デュアルPLLは各局部発振器122 および124 が基準周波数を維持し、第1のミキサ118 の場合には受信したCDMA信号を、また第2のミキサ120 の場合には受信したGPS信号を下方変換することを確実にしている。第2および第4のバンドパスフィルタ126 および128 は通常の設計の第1のIFセクション130 に結合されている。
【0034】
IF復調器130 の出力はデジタルIF ASIC400 中の第2のスイッチ402 に入力される。第1および第2のスイッチ106 および402 は制御信号インターフェース300 の制御下で動作し、第3のミキサ404 、第5のバンドパスフィルタ406 、自動利得制御回路408 、およびA/D変換器410 により通常のCDMAのような方法で、またはGPS処理で音声またはデータ出力を処理する。第3のミキサ404 の第2の入力は局部発振器の出力である。ミキサ404 は供給された信号をベースバンドに変換する。濾波され、利得制御された信号はA/D変換器410 に供給される。A/D変換器410 の出力は同位相成分(I)の第1のデジタルデータ流と直角位相成分(Q)の第2のデジタルデータ流とを含んでいる。これらのデジタル信号はデジタル信号プロセッサ520 に供給され、それはGPS信号を処理して位置決定のために必要な擬似レンジ情報を出力する。
【0035】
本発明の別の実施形態では、2つのバンドパスフィルタ126 および128 からの出力はベースバンド用途特定集積回路(ASIC)に供給され、それはバンドパスフィルタ126 および128 からのIF周波数信号出力をベースバンドに変換し、直角位相および同位相のベースバンド信号を表すデジタル値流を出力する。これらの信号はその後サーチャに供給される。サーチャは本質的にCDMA復調装置で使用される通常のサーチャと同一である。しかしながら、使用されることが好ましいサーチャは、基地局から送信されたCDMA信号と関連されたPNコードまたはGPS衛星と関連されたPNコードのいずれかに対してサーチャがサーチすることができるようにプログラムされている。サーチャは基地局からCDMA信号を受信したときCDMAチャンネルを弁別し、GPSモードにあるとき受信されたGPS信号が送信されているGPS衛星を決定する。さらに、一度GPS信号が捕捉されると、サーチャは、当業者に理解されるように信号が受信されている衛星と関連する擬似レンジを決定するために通常の方法で本質的にPNコードと関連した時間オフセットを指示する。
【0036】
当業者に理解されるように、図6に示されたような2重変換プロセスまたは代わりに単一の変換およびIFサンプリング技術、または直接変換が必要なIおよびQサンプルを生成するために使用されることができる。さらに、図6に示される実施形態の構造は、開示された方法および装置の動作に影響を与えない多くの方法によって変更されることができる。例えば、通常のプログラム可能なプロセッサが図6に示されたDSPの代わりに使用されてもよい。メモリ510 はシステムを通るデータ流がバッファを必要としないような速度である場合には要求されない。バンドパスフィルタ406 と自動利得制御回路408 は場合によっては省略されてもよく、デジタル技術またはアナログ技術を使用して構成し、またはその他の変更が可能である。多くのその他の図6に示された構造に対する変更は本発明を逸脱することなく行うことができる。さらに、別の実施形態はGPSと無線通信受信機との間のハードウエアおよびソフトウエアリソースを多くすることも少なくすることも可能であることに注意すべきである。
【0037】
図7は開示された方法および装置を含む通信システムのコンポーネントの高いレベルのブロック図である。動作において、開示された方法によれば、BSC14は基地局10内の制御プロセッサ62(図3)からのGPS情報をリクエストする。この情報はGPSトランシーバ74(図3)によって現在観測している全ての衛星の、高低角度、ドップラシフト、および特定の時間における擬似距離を含むがそれに限定されない。GPS受信機は、観察している全ての衛星を常に追跡しているから、観察している各衛星の位置、周波数、およびPNオフセットについての更新情報を有することに注意すべきである。その代わりに基地局10は無線通信装置20により観察されることのできる衛星のみのサブセットに対応するデータを送信することもでき、基地局10は街路の幅および周囲のビルディングの高さに関する情報を記憶することができると仮定する。すなわち、無線通信装置が1以上の衛星の観察が妨害されていることを決定する能力を有する場合には、基地局10は妨害された衛星に関係する情報は送信しない。
【0038】
通常のGPS受信機は、受信機の内部のGPSクロックに関して衛星信号が受信された時間を記録している。しかしながら、受信機の内部のGPSクロックは正確に真のGPS時間に同期されてはいない。それ故、受信機は衛星信号が受信された“真”のGPS時間の正確な時点を知ることはできない。後で、ナビゲーションアルゴリズムは第4の衛星を使用することによってこのエラーを補正する。すなわち、受信機内のクロックが各衛星内のクロックと正確に同期されている場合には、通常のGPS受信機は受信機の正確に位置を決定するためだけに3個の衛星を必要とする。しかしながら、受信機のクロックは正確に衛星のクロックに同期されていないから、付加的な情報が要求される。この付加的な情報は第4の衛星の信号が受信機に受信された時間を記録することによって与えられる。これは、4つの式(すなわち、4つの衛星のそれぞれ1つの式に関係している)および解かれる必要のある4つの未知項(すなわち、受信機のx,y,z座標および受信機クロックのエラー)が存在することに注目することにより理解することができる。それ故、3次元の解に対して少なくとも4つの異なる衛星からの4つの測定値が通常のGPS受信機では必要である。
【0039】
それと対照的に、本発明のシステムは真のGPS時間に同期された1つの地上基地局を使用する。1実施形態では、この基地局はCDMA基地局である。当業者は、CDMA基地局はGPS時間に同期していることを理解するであろう。基地局が完全に同期されていない場合には時間オフセットが較正されることができる。さらに、CDMAプロトコルを使用するそのようなCDMA基地局を通って通信する全ての無線通信装置は各無線通信装置20に特有のオフセットGPS時間に同期されている。時間のオフセットは信号の通信における“実際の遅延”に等しい(すなわち、基地局アンテナから無線通信装置アンテナへの無線信号の伝搬によって生じた片道の遅延プラス基地局の伝送チェイン中のハードウエア遅延により生じる内部遅延による“伝送遅延”)。これは、無線通信装置がクロックをGPS時間の基地局からの指示を受信することによってそのクロックを同期することによるものである(時間/周波数サブシステム102 内において)。しかしながら、その指示が無線通信装置に到着する時間により、その指示には、信号が基地局から無線通信装置に伝送される期間中に実際に受ける遅延に等しい量だけエラーがある。この実際の遅延は基地局と無線通信装置との間の往復を行う信号に必要な時間の長さを測定することによって決定される。片道の遅延は往復の遅延のほぼ半分に等しい。往復の遅延を測定する多くの方法が当業者によって利用可能である。
【0040】
本発明の方法および装置により、時間/周波数サブシステム102 内の処理回路は時間/周波数サブシステム内の内部クロックを補正して、基地局10と無線通信装置20との間で伝送される信号の受ける遅延を考慮に入れることによって無線通信装置をより正確にGPS時間に同期させる。
【0041】
無線通信装置20内で行われる処理は、図5の機能ブロック間で分割されて示されている。しかしながら、この処理機能を行うために使用される特定の構成は単一の処理回路であってもよく、あるいはここに開示されたグループとは異なるグループである機能を行う個々の処理回路であってもよい。そのようなハードウエア内の別の機能のグループ化は、本発明の方法および装置の動作に影響を与えることなく行うことができる。すなわち、当業者は、処理機能が開示された方法および装置の動作に影響を与えることなく、無線通信装置20を通して種々の処理回路出分割または組合わせを行うことができることを理解するであろう。
【0042】
さらに、基地局10と無線通信装置20との間の距離は無線通信装置20の位置決定を助けるために使用されることができる。すなわち、基地局10と無線通信装置20との間の直接の視線が存在する場合には、2個の衛星の距離測定と1つの基地局の距離測定しか必要としない。直接の視線がサービスしている基地局10と無線通信装置20との間に存在しない場合には、3個の衛星と1つの往復遅延測定が3次元位置を計算するために必要とされる。余分の衛星測定はマルチパスにより生じる付加的な遅延により導入される付加的な距離に対するエラーを補正するために必要とされる。往復遅延は無線通信装置中のクロックエラーを補正するために使用される。
【0043】
ここに記載されたシステムは、無線通信装置20がCDMAネットワークのカバー範囲内にあり、CDMAネットワークで十分なサービス品質があるかぎり、無線位置決定機能(WPF)18(図7)を使用して任意の時間に確実なCDMA無線通信装置の位置が決定されることを可能にする。WPFは入力および出力ポートと処理回路を備えている。当業者は、処理回路が汎用コンピュータ、マイクロプロセッサ、マイクロコンピュータ、専用状態マシン、専用のディスクリートなハードウエア回路、用途特定集積回路(ASIC)、またはWPFが行われることにより実行される機能を有する任意のその他の回路でよいことを理解するであろう。
【0044】
無線通信装置の位置を決定する処理は、無線通信装置20、ネットワーク、あるいは、内部位置アプリケーション(ILA)17、外部位置アプリケーション(ELA)15、緊急サービスアプリケーション(ESA)13のような外部エンティテイによって開始されることができる。これらのコンポーネント13,15,17は位置情報をリクエストおよび、または受信することのできるハードウエアまたはソフトウエアのいずれであってもよい。1実施形態では、ILA17はBSC14に結合された端末であり、無線通信装置20に関する位置情報を直接リクエストし、受信することができる。別の例ではILA17はMSC12内のプロセッサによって実行されるソフトウエアアプリケーションである。
【0045】
WPF18は粗データを受取ることのできる通常のプログラム可能なプロセッサであることが好ましく、それは無線通信装置および衛星から受信され(すなわち2つの衛星からの擬似距離、無線通信装置から基地局までの距離、および時間補正係数)、無線通信装置の位置が計算される。しかしながら、そのような受信された情報に基づいて無線通信装置20の位置を計算することを要求されたににを受信し、この位置決定を出力することのできる任意の装置が使用されることができる。例えば、WPF18は、ASIC、ディスクリートな論理回路、状態マシン、または他のネットワーク装置(BSC14のような)内のソフトウエアアアプリケーションとして構成されてもよい。さらに、WPF18は基地局10、BSC14、またはMSC12内のどこかに位置されてもよい。WPF18はBSC14と通信している専用のプロセッサによって実行されるソフトウエアアアプリケーションであることが好ましい。したがって、基地局10、BSC14、およびMSC12は通常のコンポーネントを開示された方法および装置に備えるために大きく変形される必要はない。その代わりに、WPF18はBSC14内のプロセッサによって行われるソフトウエアアアプリケーションである。WPF18は通常の料金請求機能、管理機能、家庭位置登録/訪問者位置登録機能、およびその他の通常のBSCに結合されたプロセッサにより行われる補助機能により使用されるのと類似した通信ポートを介してBSC14と通信することが好ましい。
【0046】
位置計算に使用されるアルゴリズムはParkinson.B.W.およびSpilker,J.J.著クローバル位置決定システム、理論および応用、ボリュームI、1996年に記載されている。さらに、ボリュームIIには微分GPS補正を行う方法が示されている。このような補正が無線通信装置の位置を正確に計算するためにWPF18によって行われなければならないことは当業者に理解されるであろう。
【0047】
開示された方法および装置によれば、サービスプロバイダは、能力、セキュリティ、サービスプロフィール等のようないくつかの条件に基づいて位置決定サービスを限定することができる。位置決定サービスは以下のサービスのそれぞれ、またはいくつかのサブセットを支援することができる。
(1)無線通信装置の発生する位置決定のリクエスト(WPF)
(2)ネットワークの発生する位置決定のリクエスト(NRF)
(3)サービスインスタンス当たり許容される位置決定(PSI)、無線通信装置は特定のサービスを配送する目的で装置の位置決定を一時的に許可する外部アプリケーションを与える。
(4)無線通信装置識別子を有する/有しない位置決定(PWI/PWO):定められた地理的区域中の全ての無線通信装置の位置決定を行う。PWIは識別子およびPWOがそれらの位置だけを与える間におけるこれらの装置の位置を与える。
(5)閉じられたグループ内の位置決定(PCG):位置決定のための特別の権利が定められることができる範囲のグループの生成のを許容する。
【0048】
[表I 位置決定サービスのタイプ]
開始者/周期性 オンディマンド 周期性 イベント
(単一/多数例) トリガー
無線通信装置 WPF,PSI, WPF,PCG, WPF
PCG
ネットワーク PWO PWO NRP/PWO
外 部 PWO,PWI, PWO,PWI,
PCG,PSI PCG
本発明の方法および装置の1実施形態によれば、無線通信装置20はその無線通信装置20の位置の決定のためのリクエストを発生し、無線通信装置20は位置リクエストをMSC12に送る。MSC12はリクエストを確認し、無線通信装置20がリクエストされたサービスのタイプに同意することを確実にする。その後、MSC12は無線通信装置20の位置を発見するためにサービスしているBSC14にリクエストを送る。BSC14はサービスしている基地局10に目標指向情報の位置を質問する。サービスしている基地局10は次の信号を送ることによってリクエストに応答する。
(1)観察している衛星のリスト
(2)それらのドップラシフト
(3)それらのドップラの変化率
(4)それらの擬似レンジ
(5)それらの高低角
(6)それらの信号対雑音比(SNR)
(7)基地局と無線通信装置との間で送信された信号の受ける遅延量が決定できる指示(例えば無線通信装置とサービスしている基地局との間の往復遅延RTD)。
【0049】
基地局と無線通信装置との間で送信された信号の受ける遅延量を決定するために使用される指示は、基地局から無線通信装置に送られて、無線通信装置から基地局に送り返され、あるいは無線通信装置から基地局に送られて、基地局から無線通信装置に送り返される往復伝送で受ける往復遅延であってもよい。この計算は、信号が往復の原点から送信される時間を記録し、往復の反対端でその信号を再送信することを要求された時間量を知り、再送信された信号が受信される時間を記録することにより行われる。基地局が信号を発生し、往復遅延の測定が行われるならば、基地局は以下の動作を行うことができる。
(1)無線通信装置が基地局と無線通信装置との間の(往復遅延等の)片道の遅延を計算することができる情報の送信
(2)基地局から無線通信装置への片道の遅延量の計算(折返し時間は無線通信装置の信号の受信間では無視できるか折り返し時間で情報を受信するかのいずれかであると仮定する)および無線通信装置に対する片道遅延の送信。
【0050】
同様に、無線通信装置が信号を発生して往復遅延の測定を行ったならば、無線通信装置は以下の動作を行うことができる。
(1)基地局における受信と再送信との間の時間量が無視できると仮定して、測定された往復遅延から直接片道遅延を計算する。
(2)無線通信システムが片道遅延を計算することができる無線通信装置から受信された信号の受信と再送信との間の経過時間がどの程度かについての基地局からの指示を受信する。あるいは、
(3)片道遅延を計算する基地局に記録された往復遅延を送り返し、無線通信装置に片道遅延を指示する値を送信する。
【0051】
本発明の方法および装置の1実施形態によれば、基地局と無線通信装置20との間の往復遅延は、基地局から送信された信号についてのフレームの開始端と無線通信装置20からの基地局によって受信された信号についてのフレームの開始端との間の差として決定される。これはCSM(セルサイトモデム)により測定された第1の到着フィンガのフィンガオフセット遅延として知られている。往復遅延は以下の合計であることに注意すべきである。
(1)順方向リンク(基地局伝送チェイン)のハードウエア遅延
(2)基地局アンテナと無線通信装置アンテナとの間の片道伝搬
(3)無線通信装置(受信および送信チェイン)内のハードウエア遅延
(4)無線通信装置のアンテナと基地局アンテナとの間の片道遅延。
【0052】
通信工業会/電子工業会(TIA/EIA)により公表された通信工業標準規格IS-95 によれば、無線通信装置は,無線通信装置20により送信された信号のフレームの前端が無線通信装置20により受信されたフレームの前端と整列するようなそれ自身のハードウエア遅延を補償するようにその送信タイミングを調節しなければならない。したがって項目(3)におけるハードウエア遅延は許容可能な公差内になるように自動的に除去される。
【0053】
項目(1)における遅延は約50ナノ秒の正確さで較正されることができる。したがって視線状態下で、RTD測定は無線通信装置20と基地局10の間の距離を決定するために使用されることができる。
【0054】
基地局10内のGPS受信機74は連続的に視野にある衛星を追跡し、したがって衛星に関するパラメータについて情報を更新することができることに注意すべきである。BSC14はRTD、擬似距離、衛星高低角、ドップラシフト、および各衛星に対するドップラ変化率を使用して、以下説明するように時間および周波数の両者においてサーチウインドウの中心およびサーチウインドウのサイズを計算する(図8参照)。
【0055】
時間ドメインにおいて、i番目の宇宙船(“SVi ”)に対するサーチウインドウの中心は図8におけるサービスしている基地局10とSVi との間の擬似距離ρbに等しい。SVi に対するサーチウインドウのサイズはd cos(φ)に等しく、ここで、dは基地局BSと無線通信装置(図8においてMSで表示されている)との間の往復遅延の半分に等しく、 cos(φ)は受信機を通過して地球の中心から発生する地球の半径に関する衛星の高度のコサインである。
【0056】
当業者は、基地局と衛星との間の距離が基地局と無線通信装置との間の距離に比較してはるかに大きいことを注目することによってこの関係を理解するであろう。したがって、衛星が本質的に頭上にあるとき、距離ρm1 ,ρb,およびρm2 は本質的に等しい。衛星の高低角がほぼ90度であるとき、ρm1 とρm2 との差はほぼ2dでありサーチウインドウサイズはほぼdである。
【0057】
本発明の方法および装置の1実施形態によれば、サーチウインドウの中心およびサイズは以下の情報によってさらに精密にされる。
(1)無線通信装置の最近の位置に関する情報
(2)無線通信装置が信号を受信する他の基地局が存在する場合にそれらについての情報
(3)他の基地局から受信された信号の相対強度
(4)付加的な信号が無線通信装置によって受信されることができる他の基地局の相対的な位置
(5)セクター化された基地局から送信された無線通信装置により受信された信号か否か、イエスであれば信号が送信されるセクターについての情報
(6)任意の基地局を含み、そのような送信された信号に関する到着時間または到着時間差情報のいずれかにより任意のソースから送信された信号を使用する無線通信装置の位置の三角測量の試み。
【0058】
周波数ドメインでは、SVi に対するサーチウインドウ中心はf0 +fdiに等しく、ここで、f0 はGPS信号の搬送波周波数に等しく、fdiはSVi により送信された信号のドップラシフトに等しい。SVi に対するサーチウインドウサイズは受信機の周波数エラーおよびドップラの変化率による周波数の不確実性に等しい。BSC14は観察している衛星、時間および周波数の両者におけるサーチャのサーチウインドウ中心およびサイズ、および無線通信装置20の位置を決定するために必要な衛星の最小数を含む情報を送信する。
【0059】
1実施形態によると、無線通信装置20に対するメッセージは無線通信装置20における再同調信号をトリガーする。メッセージはまた、“アクション時間”(受信機が将来GPS受信機周波数に再同調する特定の時間)を有することができる。応答において、無線通信装置20はアクション時間に第1および第2のスイッチ106 および402 (図6)を付勢し、それによってGPS周波数に再同調する。デジタルIF ASIC 400はそのPN発生器(図示せず)をGPSモードに変化させ、全ての特定の衛星のサーチを開始する。
【0060】
一度無線通信装置20が最小数の必要な衛星を捕捉すると無線通信装置20内のGPSクロックに基づいて擬似レンジを計算し、通信システム周波数に再同調し、擬似レンジを第1の3個の衛星の測定された信号対雑音比および最近のCDMAパイロットサーチ結果と共に擬似レンジ結果をBSC14に送る。パイロットサーチ結果は、装置が3個の衛星を捕捉できず、サービスしている基地局と無線通信装置20との間に直接の視線通路が存在しない場合に必要である。それにもかかわらず、パイロットサーチ情報のような利用できる情報を使用して別の基地局のような他の装置からの往復遅延が計算されることにより、3個より少ない衛星が使用可能である。パイロットサーチ情報に基づいて往復遅延決定する技術は技術的によく知られている。
【0061】
BSC14はサービスしている基地局10の位置、対応する往復遅延測定、検討している衛星の空間的位置(固定された予め定められた基準原点)、および微分GPS補正と共に無線通信装置20により行われた擬似レンジ測定結果をWPF18に送り、そこで無線通信装置20の位置が計算される。BSC14により無線通信装置20から受信された擬似レンジはWPF18に送られ、無線通信装置20内のクロックに関係している。それ故、それらはエラーがある(すなわち、サービスしている基地局10と無線通信装置20との間の往復遅延によってバイアスされている)。図9は、WPF18がローカルクロックバイアスに対してどのように補正するかを示す説明図である。図9では、δ1 は基地局10から無線通信装置20に送信された信号またはその反対の信号の受信における擬似レンジ(往復遅延の半分)を表している。rm1 ,rm2 ,rm3 は無線通信装置から第1、第2、第3の選択されたGPS衛星60, 70, 80までの擬似レンジである。これらの測定は無線通信装置20中のローカルクロックに関して行われたものである。しかし、ローカルクロックはGPS時間からδ1 だけオフセットしているので、補正された擬似レンジは次のようになる。
ρ1 =ρm1 +δ1
ρ2 =ρm2 +δ1
ρ3 =ρm3 +δ1
WPF18は、上記3つの式、3個の衛星の位置(空間的)、サービス基地局の位置、および対応するRTD測定を使用して無線通信装置20の位置を計算する。RTDを知ることは真のGPS時間に関する無線通信装置のローカルクロックバイアスを正確にしることと等価であることに注目すべきである。すなわち、3つの衛星からの3つの距離(レンジ)方程式を解けば十分である。さらに、基地局と無線通信装置との間に直接の伝搬路が存在する場合には、3個の衛星は過剰決定解を与える。それはRTDは基地局に対するクロックオフセットと擬似レンジ測定の両者の決定に使用することができるからである。
【0062】
また、必要な最小数の衛星の数は、無線通信装置20と基地局10との間に直接視線接続が存在し、無線通信装置20と基地局10との間の距離が無線通信装置20と基地局10との間のRTDから直接決定されることができる場合には、2個に減少されることに注目すべきである。この数は他のパイロット(サイト)についての情報が利用できればさらに減少されることができる。例えば、もしも無線通信装置20が2以上の基地局と通信しており(例えばソフトハンドオフ)、それらのいずれも無線通信装置20と直接の視線を有していないならば、1より多くの往復遅延が計算されることができ、したがって2個の衛星は全て無線通信装置20の位置を決定するために必要とされる。すなわち、計算は5つの式に基づいて行われることができる(2つの式は2個の衛星に関連する2つの擬似レンジ測定に関係し、2つの式は2個の基地局RTD測定に関係し、1つの式は無線通信装置20内のローカルクロックが真のGPS時間に同期されることを可能にするサービスしている基地局に対するRTDに関係している)。これはGPS衛星が建物や樹木によって妨害去れ、陰になった場合のシナリオで非常に有効である。さらに、GPS衛星をサーチする時間を減少させる。WPF18はBSC14に計算された位置の情報を送り、BSC14はその計算された位置の情報をMSC12に送り、または直接無線通信装置20に送信する。
【0063】
別の基地局からのRTDを使用するのに加えて、本発明の方法および装置は、異なった基地局からのパイロットの間または基地局と衛星との間の到着時間差(TDOA)を使用して無線通信装置の位置決定を助けることができる。そのようなTDOAはGPS衛星からの衛星信号のTDOAに付加して使用される。そのような使用は少なくとも1つの基地局が利用可能である(すなわち、基地局がGPS時間に同期されている)とき、または2以上の同期されない基地局がある(すなわち、基地局が互いに同期されているがGPS時間には同期されていない)とき無線通信装置の位置を決定するのを助け、所望の数よりも少ない衛星を使用することができる。順方向リンク信号からのTDOA測定の使用はRTD情報のないときでも必要な衛星の数を減少させることを可能にする。
【0064】
以下は無線通信装置の位置を決定するのを助ける順方向リンク情報を使用する本発明の方法および装置のいくつかの実施形態を記載している。開示された装置は本質的に汎用プロセッサ、デジタル信号プロセッサ、専用回路、状態マシン、ASIC、またはその他の技術的に知られている開示された機能を行うことのできる回路であることを理解すべきである。
【0065】
無線通信装置の位置を決定するために、多数の未知数(例えば、装置のxyz座標および正確な時間)はこれらの未知数を含む式の数と一致しなければならない。以下の式はTDOA測定が行われる各信号対に対して書かれたものである(すなわち、各対は第1の基地局BS1 により送信された1つの信号および第2の基地局BS2 により送信された1つの信号からなっている)。
TDOAbs1,bs2,wcd =
【数1】
【0066】
ここで、TDOAbs1,bs2,wcd は無線通信装置(wcd)によって第1の基地局(bs1 )と第2の基地局(bs2 )から受信された信号の間のTDOAである。
Δtは各信号源により送信された信号を発生するために使用されたクロック間のオフセットであり、基地局bs1 とbs2 の内部BS遅延間の差である。
xbs1 は基地局bs1 の位置を決定するx座標であり;
xbs2 は基地局bs2 の位置を決定するx座標であり;
ybs1 は基地局bs1 の位置を決定するy座標であり;
ybs2 は基地局bs2 の位置を決定するy座標であり;
zbs1 は基地局bs1 の位置を決定するz座標であり;
zbs2 は基地局bs2 の位置を決定するz座標であり;
xwcd は無線通信装置の位置を決定するx座標であり;
ywcd は無線通信装置の位置を決定するy座標であり;
zwcd は無線通信装置の位置を決定するz座標である。
【0067】
上記の式に対して、未知数は無線通信装置のx,y,zとΔtである。同様の式は衛星TDOA測定に対しても記載されることができる。4つの未知数が存在するから、このような4つの式がなければならず、Δtが衛星と基地局の両者に対して一定であると仮定して、少なくとも4個の衛星または基地局の任意の組合わせが必要である。この仮定が正しくない場合には(すなわち、基地局がGPS時間に同期していない場合)、1つの付加的な未知数が追加され、そのため1つの付加的な信号源が必要になる。さらに、基地局とGPSシステムが同期していない場合には、衛星と基地局の両者を使用するためには少なくとも2つの衛星と少なくとも2つの基地局がなければならない。
【0068】
もしも、通信基地局が互いに関して同期して動作しているならば、互いのパイロットに関する各パイロットのTDOAは上記の式を使用して決定されることができる。もしも、基地局もまたCDMA通信の基地局の場合のようにGPS時間にも同期しているならば、順方向リンクパイロットTDOAおよび衛星TDOAを使用する方法はそれら両者がGPS時間に同期しており、“同期GPS/順方向リンクモード”とここで呼ばれる。
【0069】
通信基地局がGPS時間と同期していない場合には、順方向リンクTDOAおよび衛星TDOAの両者を使用する方法はここでは“非同期GPS/順方向リンクモード”と呼ばれる。この場合には用語“非同期”とは順方向リンクにおける到着時間測定を行うために使用された時間基準とGPS衛星信号における到着時間測定を行うために使用された時間基準との到着時間のオフセットが存在することを示している。用語“非同期”は、基地局が互いに同期していないことを伝えようとするものでも、GPS衛星が互いに同期していないことを伝えようとするものでもないことを理解すべきである。事実、各基地局は各他の基地局と同期されることが好ましく、それによって基地局から受信された各信号の到着時間差が各他の基地局に関して決定されることができる。同様に、各衛星はGPS星座において他の衛星と同期している。
【0070】
図のA〜Dを参照すると、3個の衛星10a,10b,10cによって送信されたパイロットPNシーケンス間のタイミングが論じられている。ここに開示された方法および装置は本質的にCDMAシステムに関して記載されているが、非同期GPS/順方向リンクモードは、時分割多重アクセス(TDMA)通信システムのようなGPS時間と関係しない同期通信システムにより使用されるとき最も有効である。
【0071】
[同期GPS/順方向リンクモード]
図10は3つの基地局から送信されたパイロットPNシーケンス間の関係を示している。図10は3つのパイロットPNシーケンス901, 903, 905 を示しており、各パイロットPNシーケンスは1から9までの番号を付けた9個のチップを有している。1つのチップはここでは擬似レンジランダム雑音シーケンス内の最少の情報単位として定義される。各チップは典型的に2進(または論理)値(すなわち1または0のいずれか)を有している。
【0072】
パイロットPNシーケンスはこの明細書では長さNを有するシーケンスとして定義され、それはN個のチップ(例えば示された例ではN=9チップ)毎に反復されるが、それはN個の連続するチップのシーケンスでランダムで現れる。当業者は、CDMA基地局により送信されるパイロットPNシーケンスは典型的に215程度の長さのチップであることを理解するであろう。しかしながら、本発明の説明を簡単にし、図を明瞭にするために図10に示されたパイロットPNシーケンスは僅か9チップの長さとして示されている。
【0073】
図10は3つの基地局10a,10b,10cの制御プロセッサ62によって発生された3つのパイロットPNシーケンス901, 903, 905 を示している。各基地局10は1つのこのようなパイロットシーケンスを発生する。CDMA通信システム内の各基地局10は、同じパイロットPNシーケンスを送信する。しかしながら、各基地局10b,10cにより発生されたパイロットPNシーケンスの最初は制御プロセッサ62によって予め定められた量だけ意図的にオフセットされている。これについて議論において、基地局10a内の制御プロセッサ62は“ゼロPNシーケンス”を送信する。ゼロPNシーケンスは他のそれぞれのパイロットPNシーケンスがオフセットされる基準である。したがって、ゼロPNシーケンスを生成する制御プロセッサ62はゼロのオフセットを導入する(したがってゼロPNシーケンスと呼ばれる)。ここに開示された方法および装置は任意の特定の基地局によってゼロPNシーケンスを発生させる必要はないことに注意しなければならない。ゼロPNシーケンスは単に説明のために示したものである。当業者は、通常のCDMA通信システムでは各パイロットPNシーケンスオフセットと各基地局との間に1対1の対応があることを理解すべきである。すなわち、各基地局は特有のオフセットを割当てられ、その1つのオフセットだけを有するパイロットPNシーケンスを発生する。
【0074】
各基地局10b,10cの制御プロセッサ62により意図的に導入されたオフセットは、整数のチップを送信するために必要時間量に等しい期間を有していることが好ましい。このオフセットは通信システム中の各基地局に特有である。図10に示された例では、ゼロPNシーケンス901 は基地局10aの制御プロセッサ62内において、時間T0 で始まり、時間Tend で繰返しが始まるように発生される。CDMA通信システムでは時間T0 とTend はGPS時間に関して予め定められた時間である。パイロットPNシーケンスは固定長であり、反復されるから、パイロットPNシーケンスの開始はGPS時間に関して規則的な予測可能なインターバルで発生する。
【0075】
第1のこのようなパイロットPNシーケンス901 はゼロPNシーケンスでありタイミング基準として使用される。第2のこのようなパイロットPNシーケンス903 は時間T1 で開始し、ゼロPNシーケンスから8チップだけオフセットされている。したがって、ゼロPNシーケンス901 を発生する基地局10aがパイロットPNシーケンス901 の第1のチップ907 を発生するとき、パイロットPNシーケンス903 を発生する基地局10bは第9のチップ909 を発生する。パイロットPNシーケンス905 は時間T2 で開始し、ゼロPNシーケンスから3チップだけオフセットされている。それ故、ゼロPNシーケンスが第1のチップ907 を発生するとき、パイロットPNシーケンス905 を発生する基地局10cは第4のチップ911 を発生する。それ故、システム中の各基地局はシステム中の互いの基地局に関して同期したオフセットパイロットPNシーケンスを発生することができる。ゼロシーケンスが開始する時間を知らなくても、各信号が発生される時間にパイロットPNシーケンス903 とパイロットPNシーケンス905 との間のオフセット4チップであることが決定されることができる。
【0076】
当業者は、真のGPS時間は、4個の衛星から受信されたGPS信号から基地局の位置に対する完全な解を計算することによってGPS受信機とプロセッサを有する任意の基地局内で得られることができることを理解するであろう。このような完全な解は技術的によく知られているように受信基地局10aの座標x,y,zとGPS時間tから得られる。さらに一般的に説明すると、GPS時間はN+1の衛星を使用して位置に対するN次元の解を計算することによって正確に決定されることができる。したがって、基地局10aはゼロPNシーケンス901 を真のGPS時間に関して特定された時間に開始させる。
【0077】
ゼロPNシーケンスが開始される絶対時間を知る必要はないことに注目すべきである。それは無線通信装置で受信された2つの信号の到着時間差は相対的な測定として決定されるからである。一度、無線通信装置が基地局から送信されているパイロット信号が受信されることができることを決定したならば、受信機は同じ基地局から送信された“同期”信号において送信された情報を復調することができる。同期”信号について復調された情報はパイロットPNシーケンスに適用されたPNオフセット(ゼロPNシーケンスに関して)を含んでいる。それ故、ゼロPNシーケンスはCDMA通信システム内の各基地局によって送信された各パイロットPNシーケンスの相対的タイミングを決定するための基準として機能する。
【0078】
しかしながら、各CDMAの基地局10a内の制御プロセッサ62がGPS時間と同期していても、送信している基地局10の通信アンテナ201 の放射中心に対して各パイロットPNシーケンス901 を送信するのに関連する伝搬遅延が存在する。伝送チェインを通るハードウエア遅延(以下“内部BS遅延”と呼ぶ)は、パイロットPNシーケンスが真のGPS時間(すなわち、制御プロセッサ62においてパイロットPNシーケンスが開始する時間)に関して開始する時間と、アンテナ43の放射中心から送信の時間におけるパイロットPNシーケンスの開始時間との間にオフセットを導入する。内部BS遅延は各基地局10に対して異なっていてもよい。したがって、CDMA基地局は基地局の送信アンテナ43の放射中心においてGPS時間または相互に正確に同期してはいない。この不正確さは通信に問題を生じるような大きいものではないが、位置決定の目的に対して到着時間差を非常に正確に決定しようとするときには問題を生じる。
【0079】
図11は、内部BS遅延により生じたパイロットPNシーケンス901, 903, 905 の相対的なタイミングの影響を示している。第1のパイロットPNシーケンス901 は時間Ta から時間Tb に遅延されている。同様にパイロットPNシーケンス903 は時間Ta から時間Td に遅延されている。パイロットPNシーケンス905 は時間Ta から時間Tc に遅延されている。図11から認められるように、パイロットPNシーケンス903 および905 は、各基地局10を通るBS遅延の差によってそれぞれパイロットPNシーケンス901 に関して時間S1 =Tb −Td およびS2 =Tb −Tc だけシフトされている。相対的オフセットS1 ,S2 は無線通信装置20において3つの基地局10から受信された3つのパイロット信号209, 211, 213 のTDOAを正確に決定するために知られていなければならない。
【0080】
各基地局10の内部BS遅延も、相対的オフセットSも典型的に時間にわたってあまり大きく変化しない。したがって、本発明の1実施形態では、各基地局10の内部BS遅延と典型的に相対的オフセットSとのいずれも,基地局が任命されている時間における測定することができる。その代わりに、内部BS遅延または相対的オフセットSは規則的なインターバルで決定され、無線通信装置に通報される。さらに別の実施形態では、内部BS遅延または相対的オフセットSは連続的に決定され、規則的なインターバルで要求に応じて、あるいは値の変化に応じて無線通信装置に通報される。
【0081】
CDMA基地局(またはGPS時間に同期された他のシステムからの基地局)間の内部BS遅延および相対的オフセットを測定する1つの方法は、基地局10からパイロットPNシーケンスを受信するために既知の距離離れてい位置している(すなわち、基地局のアンテナから遠隔の同期しているステーションまでの既知の伝搬遅延を有する)遠隔の同期ステーションを使用することである。図12は、複数の基地局10a,10b,10cから既知の距離離れてい位置している遠隔の同期しているそのようなステーション1101の簡単化されたブロック図である。遠隔の同期ステーション1101は、クロック装置1103、受信機1105、送信機1107、および処理回路1109を備えている。基地局10a,10b,10cおよび遠隔の同期ステーション1101間の距離は固定されているから、2以上の基地局から信号を受信することのできて既知の位置で動作することのできるそのような遠隔の同期ステーションは基地局間のオフセットを決定するために使用されることができる。既知の位置で信号源から来る信号の到着時間差は既知の位置にある遠隔の同期ステーション1101に対して容易に決定されることができるから、遠隔の同期ステーション1101は予期された到着時間差と測定された到着時間差との差を決定することができる。
【0082】
その代わりに、遠隔の同期ステーション1101がGPS受信機を有している場合には、以下のようにして誘導された遅延量を決定することができる。基地局はまた信号が基地局10内の制御プロセッサ62で発生された時間を決定することができる。それはこの基地局はGPS時間に関して予め定められた時間にパイロットPNシーケンスを発生するからである。
【0083】
図13は、既知の距離にあるまたは既知の伝送遅延で信号が送信されることのできる遠隔同期ステーション1101を使用して基地局の制御プロセッサ62と送信アンテナ43の放射中心との間に導入された遅延量を決定するために使用される方法を示している。示されているように、パイロットPNシーケンスは最初に時間t1 において発生される。パイロットPNシーケンスは基地局を介して送信アンテナ43の放射中心に送られ、時間t2 に送信を開始する。その後、パイロットPNシーケンスは空中を遠隔同期ステーションに送信され、そこで時間t3 において受信される。したがって、真のGPS時間に関して両方の時間t1 とt3 は知られているから、制御プロセッサ62から遠隔同期ステーション1101に伝搬するパイロットPNシーケンスに必要な時間の長さは知られている。さらに、送信アンテナから遠隔同期ステーション1101に伝搬する信号に対して必要な時間の長さ(すなわち、時間t2 とt3 の間の差)も知られているから、信号により伝搬された距離および、または通路は測定され、決定されることができる。
【0084】
時間t2 とt3 の間の差を決定する1つの方法は、往復遅延を測定することである。例えば、信号を受信する無線通信装置は基地局10と電話装置との間の往復遅延を与えるように構成された通常の無線移動体電話装置である。その代わりに、基地局10は基地局10と無線通信装置20との間の往復遅延を決定することのできる通常の基地局でもよい。当業者は、これらの基地局10と無線通信装置との間で生じる伝搬遅延を決定するいくつかの方法が存在することを理解するであろう。いくつかのよく知られた技術がこの測定を行うために使用されることができる。当業者は、遠隔同期ステーション1101が通常の無線電話装置であり、同期機能を行うために特別に設計された試験装置のピース、または他の基地局のようなここに記載された機能を実行するように構成されることのできる他の受信機であってもよいことを理解するであろう。
【0085】
一度、これらの値が知られると、時間t1 とt2 との間の時間差は、t1 とt3 の差からt2 とt3 の間の差を減算することによって計算され、その結果としてt1 とt2 との間の時間が得られる。
【0086】
図14は、基地局に対するTDOAが同期GPS/順方向リンクモードにしたがって計算される方法を示している。図14に示されているように、3つの基地局10a,10b,10cのそれぞれは同じ時間T1 にパイロットPNシーケンスを発生する。しかしながら、各基地局10a,10b,10cは異なった内部BS遅延を有している。したがって、第1の基地局10aは時間T3 にその基地局10aによって発生されたパイロットPNシーケンスを送信し、第2の基地局10aは時間T2 にその基地局10aにおいて発生されたパイロットPNシーケンスを送信し、第3の基地局10cは時間T4 にその基地局10cによって発生されたパイロットPNシーケンスを送信する。各基地局10内の内部BS遅延は上述のようにして決定される。一度決定されると、内部BS遅延は、記憶されるか、または無線通信装置に通知される。
【0087】
一度、3つのパイロットPNシーケンスがそれぞれ基地局10の1つに関連して送信されると、送信している基地局10の送信アンテナ43の放射中心から空中を通り、受信無線通信装置20に送られてそれぞれ異なった伝搬遅延を受ける。例えば基地局10aと10bとの間のTDOAは時間T6 とT7 との間の差であるように現れる。しかしながら到着時間差は空気中を通って伝搬する信号に対して必要な時間の差のみを測定しなければならないから、制御プロセッサ62から送信アンテナ43の放射中心までのパイロットPNシーケンスの伝送で受ける内部BS遅延の差によって導入されるエラーを考慮する必要がある。これは時間T5 ,T6 ,T7 から既知の内部BS遅延を減算することによって行われることができ、結果として時間T8 ,T9 ,T10が得られる。したがって補正されたTDOAはこれら3つの時間T8 ,T9 ,T10の各対間の差である。さらに、内部BS遅延の減算は各基地局をGPS時間と同期させる。それ故、各GPS衛星はGPS時間と同期され、基地局信号の到着時間および衛星信号の到着時間は、技術でよく知られているように、最少2乗平均TDOAで使用されることのできるTDOA値を形成するために共に使用されることができる。衛星信号と基地局信号は同期しているから、基地局と衛星から送信されたパイロットPNシーケンス間の関係は知られていることは当業者に理解されるであろう。したがって、信号が基地局と衛星のいずれかから送信された正確な時間を知らないで、衛星信号が送信された時間に関して基地局信号が送信された時間を知ることができる。それ故、到着時間差は、基地局または衛星のいずれかから受信された他の信号から基地局または衛星のいずれかからの任意の信号の到着時間を減算することによって正確に決定することができる。
【0088】
[非同期GPS/順方向リンクモード]
同期GPS/順方向リンクモードの場合と同様に、非同期GPS/順方向リンクモードは、全ての基地局が互いに同期していると仮定する。しかしながら、非同期モードでは、順方向リンクで受信された信号の到着時間は同期GPS/順方向リンクモードのようにGPS信号の到着時間と組合わせて意味のあるTDOA測定を発生することはできない。むしろ、基地局からの受信された信号の到着時間は他の基地局から受信された信号の到着時間とだけ組合わされてTDOA測定が行われる。同様に、GPS衛星から受信された信号の到着時間はTDOA測定を形成するように他の衛星から受信された信号の到着時間だけと組合わせることができる。
【0089】
それにもかかわらず、無線通信装置がN個の基地局(ここでNは2以上)から信号を受信できる場合には、必要な全ては4−N−1からの信号である。受信されることのできる付加的な衛星は過剰決定解を与え、したがってさらに信頼性の高い正確な解が得られる。本明細書の開示から当業者には2以上の非同期システムが4−(N1 −N2 …NX )−Xに対して必要とされる衛星の数を減少させるために組合わされてもよいことは明白であろう。その場合には衛星システムに加えてXのシステムがあり、各システムは少なくとも1つの基地局を有し、それは無線通信装置により受信され、N個の基地局はシステムxに対して受信されることができる。
【0090】
さらに、基地局がGPS時間に同期しないという事実のために、非同期GPS/順方向リンクモードにおける内部BS遅延間の差を決定する手順は同期GPS/順方向リンクモードにおいて使用された手順と異なっている。非同期GPS/順方向リンクモードの場合には、受信機は通信システム内の基地局の2以上のものから信号を受信する。2つの基地局の各対から送信された信号間のTDOAが知られているために、受信機は既知の位置に配置される。したがって、TDOAの既知の値と測定されたTDOAの値との差は内部BS遅延(および基地局間の任意のクロックオフセット)における差に等しい。基地局の各対に対してそのような測定が行われる。これらの差は無線通信装置20中に記憶され、または通知され、TDOA値が計算されるとき考慮される。その代わりに、これらの差は、無線通信装置20からのTDOA測定値が送られるWPF18中に記憶されるか通知される。その場合には、WPF18は基地局間の同期中のエラーを考慮に入れてTDOAを補正する。計算された値が通知されたならば、それらは新しい基地局が委任されたときに規則的に要求に応じて、または値の変化したときに通知されてもよい。
【0091】
ここで説明したGPS/順方向リンクモードは“擬似レンジ衛星”として各基地局を取扱っている。擬似レンジ衛星は衛星と同期した信号を送信し、衛星によるTDOA測定で使用されることができる装置として定義される。WPF18は、基地局の位置、アンテナの高さ、アンテナの特性(アンテナパターンおよび利得)、セクタの数、セクタの方位、各セクタに対するクロックエラーのような基地局の構成を含む基地局のアルマナックを記憶している。このようにして、位置決定システムは共通の時間基準(すなわち受信された全ての信号に対する基準としてGPS時間)を有するように無線通信装置により受信された全ての信号を考慮する。ここで開示された方法および装置は、それらが利用可能であれば順方向および逆方向リンクの両者の測定を使用してもよい。すなわち、無線通信装置により送信された信号に基づいて複数の基地局において同様の測定が行われ、無線通信装置によって受信された信号の代わりにまたはそれに付加して使用されることができる。同じ技術が適用できるであろう。しかしながら、情報の到着時間は共通の位置に送信されなければならず、そのため無線通信装置から送信された信号の各基地局における相対的な到着時間の差は決定可能である。
【0092】
ここに開示された方法および装置は特定の応用に対する特定の実施形態を参照にして説明された。当業者は本発明の技術的範囲内に含まれる付加的な変形、応用、および実施形態を認識するであろう。したがって、本発明の請求の範囲はこのような応用、変形および実施形態の全てをカバーすることを意図している。
【特許請求の範囲】
【請求項1】
グローバル位置決定システム(GPS)時間に対する無線通信装置内で行われる到着時間測定を同期させるシステムにおいて、
受信機と処理回路とを具備し、
a)前記受信機は、
i)無線通信システムにおいて行われた到着時間測定と、
ii)GPS時間に同期された外部信号源からの信号とを受信するように構成され、外部信号源から受信された信号は、外部信号源と無線通信装置との間で送信された信号の受けた遅延量を決定することができるような指示を含んでおり、
b)前記処理回路は、外部信号源と無線通信装置との間で送信された信号の受けた遅延に等しい量だけ受信された到着時間測定を調節するように構成されているシステム。
【請求項2】
遅延量を決定することのできる指示は、基地局と無線通信装置との間を往復した信号の受けた遅延量を示すものである請求項1記載のシステム。
【請求項3】
遅延量を決定することのできる指示は、基地局から無線通信装置へ送信された信号の受けた遅延量を直接示すものである請求項1記載のシステム。
【請求項4】
グローバル位置決定システム(GPS)時間を無線通信装置に提供して、GPS時間を提供する基地局から無線通信装置に送信される信号が受ける遅延を決定するように構成された基地局を有する通信システム中で使用するための無線位置決定機能において、
(a)無線通信装置から離れており、少なくとも一つの通信システム基地局を含んでいる少なくとも一つの装置から無線通信装置によって受信された信号と関連する到着時間情報を受信し、その到着時間情報は無線通信システム内のシステムクロックを基準としており、システムクロックはGPS時間からオフセットしており、
GPS時間とシステム時間との間のオフセットが決定できる信号を受信し、
(b)前記受信された情報に基づいて無線通信装置の位置を決定する無線位置決定機能。
【請求項5】
少なくとも一つの装置は少なくとも一つのグローバル位置決定システム(GPS)衛星を含んでいる請求項4記載の無線位置決定機能。
【請求項6】
少なくとも一つの装置はn−m個の衛星とn個の基地局とを含んでおり、各基地局は他の各基地局と同期しており、前記位置は(n+m)のディメンションの位置解に対して決定され、nおよびmはゼロを含む負ではない整数であり、3より大きい(n+m)の値は過剰決定の3次元の解を与える請求項4記載の無線位置決定機能。
【請求項7】
少なくとも一つの装置はn個の衛星を含み、前記位置はn次元の解に対して決定される請求項4記載の無線位置決定機能。
【請求項8】
少なくとも一つの装置はn個の衛星と、GPS時間に同期されたm個の基地局と、互いに同期されたp個の基地局とを含み、前記位置は(n+m+p−1)ディメンションの解に対して決定され、nはゼロを含む負ではない整数であり、mはゼロより大きい整数であり、pはゼロ1より大きい整数であり、3より大きい(n+m+p−1)の値は過剰決定の3次元の解を与える請求項4記載の無線位置決定機能。
【請求項9】
無線位置決定機能は基地局トランシーバサブシステム内に位置している請求項4記載のシステム。
【請求項10】
無線位置決定機能は基地局制御装置内に位置している請求項4記載のシステム。
【請求項11】
無線位置決定機能は専用の位置決定装置内に位置している請求項4記載のシステム。
【請求項12】
無線位置決定機能は無線通信装置内に位置している請求項4記載のシステム。
【請求項13】
グローバル位置決定システム(GPS)時間に対して無線通信装置を同期させるシステムにおいて、
受信機と時間/周波数回路とを具備し、
a)前記受信機は、
GPS時間に同期された外部信号源から信号を受信するように構成され、外部信号源から受信された信号は、外部信号源と受信機との間で送信された信号が受ける遅延量が決定できるような指示と、GPS時間の指示を含む信号が基地局から送信される時間におけるGPS時間の指示とを含んでおり、
b)前記時間/周波数回路は、
クロック装置と、
外部信号源と無線通信装置との間で送信された信号が受けた遅延に対して受信されたGPS時間を調整した後に受信されたGPS時間にそのクロックを同期させるように構成された処理回路とを具備しているシステム。
【請求項14】
前記処理回路はさらに同期されたクロックに関して外部信号源から受信された信号の到着時間(TOA)を決定するように構成されている請求項13記載のシステム。
【請求項15】
さらに,n個の到着時間測定から無線通信装置のn次元の位置を決定する制御プロセッサを具備し、前記到着時間測定はn個の衛星から受信された信号の到着時間を示している請求項14記載のシステム。
【請求項16】
制御プロセッサは基地局トランシーバサブシステム内に位置している請求項15記載のシステム。
【請求項17】
制御プロセッサは基地局制御装置内に位置している請求項15記載のシステム。
【請求項18】
制御プロセッサは専用の位置決定装置内に位置している請求項15記載のシステム。
【請求項19】
グローバル位置決定システム(GPS)時間に対して無線通信装置内で行われる到着時間測定を同期させるシステムにおいて、
システムは受信機と時間/周波数回路とを具備し、
a)前記受信機は、
GPS時間に同期された外部信号源から信号を受信するように構成され、外部信号源から受信された信号は、外部信号源と受信機との間で送信された信号が受ける遅延量が決定できるような指示と、GPS時間の指示を含む信号が基地局から送信される時間におけるGPS時間の指示とを含んでおり、
b)前記時間/周波数回路は、
クロック装置と、
受信機によって受信された信号の到着時間をクロックに関して決定し、外部信号源と無線通信装置との間で送信された信号が受けた遅延に等しい量だけ到着時間を調節するように構成された処理回路とを具備しているシステム。
【請求項20】
受信機とプロセッサとを具備し、
a)前記受信機は、
i)Lを1より大きい正の整数として、無線通信装置がL個の同期された第1のシステムのソースから送信されたL個の第1のシステムの信号を受信した時間を示している第1のシステムの到着時間(TOA)情報と、
ii) Mを1より大きい正の整数として、無線通信装置がM個の同期された第2のシステムのソースから送信されたM個の第2のシステムの信号を受信した時間を示す第2のシステムの到着時間情報(TOA)とを受信するように構成され、
b)前記プロセッサは受信機に結合され、第1のシステムのTOA情報および第2のシステムのTOA情報からn次元の位置解を計算するように構成され、nは(L+M−2より大きくないように選定されている、無線位置決定機能。
【請求項21】
第1のシステムは衛星位置決定システムであり、第1のシステムソースは衛星であり、第2のシステムは通信システムであり、第2のシステムソースは基地局である請求項20記載の無線位置決定機能。
【請求項22】
プロセッサはさらに、
a)第1のシステムのTOA情報から第1のシステム信号の各対間の到着時間差(TODA)測定を決定し、
b)第2のシステムのTOA情報から第2のシステム信号の各対間の到着時間差(TODA)測定を決定し、
c)第1のシステムの信号間のP個のTDOA測定および第2のシステムの信号間のQ個のTDOAから、n次元の位置解を計算するように構成され、nは(P+Q)よりも大きくはなく、PおよびQはそれぞれ正の整数である請求項20記載の無線位置決定機能。
【請求項23】
第1のシステムは衛星航法位置決定システムであり、第2のシステムは通信システムであり、通信システム内の各他の基地局に各基地局を同期することが可能にされている請求項22記載の無線位置決定機能。
【請求項24】
受信機とプロセッサとを具備し、
a)前記受信機は、
i)Lを1より大きい正の整数として、無線通信装置がL個の同期された第1のシステムのソースから送信されたL個の第1のシステムの信号を受信した時間を示す第1のシステムの到着時間(TOA)情報と、
ii) Mを1より大きい正の整数として、無線通信装置がM個の同期された第2のシステムのソースから送信されたM個の第2のシステムの信号を受信した時間を示す第2のシステムの到着時間(TOA)情報と、
iii)Iを1より大きい正の整数として、無線通信装置がI個の同期された第3のシステムのソースから送信されたI個の第3のシステムの信号を受信した時間を示す第3のシステムの到着時間(TOA)情報とを受信するように構成され、
b)前記プロセッサは受信機に結合され、第1のシステムのTOA情報と、第2のシステムのTOA情報と、第3のシステムのTOA情報とからn次元の位置解を計算するように構成され、nは(L+M+I−3)より大きくないように選定され、過剰決定された3次元解が3より大きい(L+M+I−3)に対して与えられる無線位置決定機能。
【請求項25】
グローバル位置決定システム(GPS)衛星に対してサーチするためにサーチウインドウの中心を決定する無線通信装置において、
a)GPS衛星のタイミングを示す信号を含んでいる信号を基地局から受信する受信機と、
b)GPS受信機/時間ユニットと、
c)前記受信機およびGPS受信機/時間ユニットに結合され、GPS衛星の受信されたタイミングを使用して衛星のサーチを促進するためにサーチウインドウの時間的中心を決定するように構成されている制御プロセッサとを具備している無線通信装置。
【請求項26】
サーチウインドウの中心は、基地局が無線通信装置と通信している基地局内の特定のセクタを使用してさらに決定される請求項25記載の無線通信装置。
【請求項27】
情報は、サーチウインドウの中心がさらに、無線通信装置によって受信された他の基地局からの信号により信号強度を使用して決定される請求項25記載の無線通信装置。
【請求項28】
情報はさらに、2以上の基地局から送信された信号の間の無線通信装置における到着時間の差に基づいている請求項25記載の無線通信装置。
【請求項29】
情報はさらに、無線通信装置が最近どこにあったかの以前の知識に基づいている請求項25記載の無線通信装置。
【請求項30】
a)少なくとも2つの非同期基地局から信号を受信するように構成され、少なくとも2つの非同期基地局の間の到着時間差(TDOA)は本質的に知られた値である受信機と、
b)クロック装置と、
c)受信機およびクロック装置と結合されている処理回路とを具備し、この処理回路は、
i)基地局からの信号の到着時間を測定し、
ii)TDOAが知られている基地局の少なくとも各対のTDOAを測定し、
iii)TDOAが知られている基地局の各対の測定されたTDOAと既知のTDOAとの間の差を計算するように構成されている遠隔同期ステーション。
【請求項31】
さらに、計算された差を送信する送信機を含んでいる請求項30記載の遠隔同期ステーション。
【請求項32】
クロック装置が前記処理回路中に含まれている請求項30記載の遠隔同期ステーション。
【請求項33】
既知のTDOAは受信機によって受信される請求項30記載の遠隔同期ステーション。
【請求項34】
a)入力ポートと、
b)出力ポートと、
c)入力ポートおよび出力ポートに結合されている処理回路とを具備し、この処理回路は、
i)既知の位置を有する複数の信号源から送信された信号が1つの無線通信装置で受信され、それらの信号源の少なくともいくつかのものは基地局信号源である、前記信号の受信された時間を示す到着時間情報を入力ポートから受信し、
ii) 基地局信号源の各対に対して、測定されたTDOAと既知のTDOAとの間の差を表す値を入力ポートから受信し、
iii)各信号源に対して、受信された到着時間情報から信号源の各対間のTDOAを計算し、
iV) 基地局信号源の各対に対して、測定されたTDOAと既知のTDOAとの間の差を使用して基地局信号源の各対間のTDOAを調整し、
v)差が受信された信号源の各対に対して調整されたTDOAを使用し、差が受信されなかった信号源の各対に対して調整されていないTDOAを使用して無線通信装置の位置を計算する無線位置決定機能。
【請求項35】
a)信号が基地局から送信され、伝送遅延が既知の値を有しているとき、基地局から信号を受信するように構成されている受信機と、
b)各基地局に存在するクロックと同期されたクロック装置と、
c)受信機およびクロック装置と結合されている処理回路とを具備し、この処理回路は、
i)基地局からの信号の到着時間を測定し、
ii)到着時間と基地局から送信された信号の伝送時間との差として伝送遅延を計算し、
iii)計算された伝送遅延と既知の伝送遅延との間の差を計算するように構成されている遠隔同期ステーション。
【請求項36】
さらに、処理回路に結合され、実際の遅延と既知の遅延との間の計算された差を送信するように構成されている送信機を備えている請求項35記載の遠隔同期ステーション。
【請求項37】
a)基地局が既知の位置に配置され、無線通信装置と基地局との間の信号の伝搬に必要な時間量を示す遅延の指示を含む信号を受信するように構成されている受信機と、
b)この遅延の指示に基づいてグローバル位置決定システム(GPS)のサーチウインドウの大きさを決定するように構成されている処理回路とを具備している無線通信装置。
【請求項38】
a)基地局の位置と、基地局と無線通信装置との間の近似的な距離とが知られている基地局からの信号を受信するように構成されている受信機と、
b)この位置および基地局と無線通信装置との間の近似的な距離に基づいてグローバル位置決定システム(GPS)のサーチウインドウの中心を決定するように構成されている処理回路とを具備している無線通信装置。
【請求項39】
a)コード分割多元アクセス(CDMA)信号を受信するように構成されている受信機と、
b)グローバル位置決定システム(GPS)の信号を受信する受信機と、
c)CDMA信号をCDMAコードとを相関させ、GPS信号とGPSコードとを相関させる処理回路とを具備している無線通信装置。
【請求項1】
グローバル位置決定システム(GPS)時間に対する無線通信装置内で行われる到着時間測定を同期させるシステムにおいて、
受信機と処理回路とを具備し、
a)前記受信機は、
i)無線通信システムにおいて行われた到着時間測定と、
ii)GPS時間に同期された外部信号源からの信号とを受信するように構成され、外部信号源から受信された信号は、外部信号源と無線通信装置との間で送信された信号の受けた遅延量を決定することができるような指示を含んでおり、
b)前記処理回路は、外部信号源と無線通信装置との間で送信された信号の受けた遅延に等しい量だけ受信された到着時間測定を調節するように構成されているシステム。
【請求項2】
遅延量を決定することのできる指示は、基地局と無線通信装置との間を往復した信号の受けた遅延量を示すものである請求項1記載のシステム。
【請求項3】
遅延量を決定することのできる指示は、基地局から無線通信装置へ送信された信号の受けた遅延量を直接示すものである請求項1記載のシステム。
【請求項4】
グローバル位置決定システム(GPS)時間を無線通信装置に提供して、GPS時間を提供する基地局から無線通信装置に送信される信号が受ける遅延を決定するように構成された基地局を有する通信システム中で使用するための無線位置決定機能において、
(a)無線通信装置から離れており、少なくとも一つの通信システム基地局を含んでいる少なくとも一つの装置から無線通信装置によって受信された信号と関連する到着時間情報を受信し、その到着時間情報は無線通信システム内のシステムクロックを基準としており、システムクロックはGPS時間からオフセットしており、
GPS時間とシステム時間との間のオフセットが決定できる信号を受信し、
(b)前記受信された情報に基づいて無線通信装置の位置を決定する無線位置決定機能。
【請求項5】
少なくとも一つの装置は少なくとも一つのグローバル位置決定システム(GPS)衛星を含んでいる請求項4記載の無線位置決定機能。
【請求項6】
少なくとも一つの装置はn−m個の衛星とn個の基地局とを含んでおり、各基地局は他の各基地局と同期しており、前記位置は(n+m)のディメンションの位置解に対して決定され、nおよびmはゼロを含む負ではない整数であり、3より大きい(n+m)の値は過剰決定の3次元の解を与える請求項4記載の無線位置決定機能。
【請求項7】
少なくとも一つの装置はn個の衛星を含み、前記位置はn次元の解に対して決定される請求項4記載の無線位置決定機能。
【請求項8】
少なくとも一つの装置はn個の衛星と、GPS時間に同期されたm個の基地局と、互いに同期されたp個の基地局とを含み、前記位置は(n+m+p−1)ディメンションの解に対して決定され、nはゼロを含む負ではない整数であり、mはゼロより大きい整数であり、pはゼロ1より大きい整数であり、3より大きい(n+m+p−1)の値は過剰決定の3次元の解を与える請求項4記載の無線位置決定機能。
【請求項9】
無線位置決定機能は基地局トランシーバサブシステム内に位置している請求項4記載のシステム。
【請求項10】
無線位置決定機能は基地局制御装置内に位置している請求項4記載のシステム。
【請求項11】
無線位置決定機能は専用の位置決定装置内に位置している請求項4記載のシステム。
【請求項12】
無線位置決定機能は無線通信装置内に位置している請求項4記載のシステム。
【請求項13】
グローバル位置決定システム(GPS)時間に対して無線通信装置を同期させるシステムにおいて、
受信機と時間/周波数回路とを具備し、
a)前記受信機は、
GPS時間に同期された外部信号源から信号を受信するように構成され、外部信号源から受信された信号は、外部信号源と受信機との間で送信された信号が受ける遅延量が決定できるような指示と、GPS時間の指示を含む信号が基地局から送信される時間におけるGPS時間の指示とを含んでおり、
b)前記時間/周波数回路は、
クロック装置と、
外部信号源と無線通信装置との間で送信された信号が受けた遅延に対して受信されたGPS時間を調整した後に受信されたGPS時間にそのクロックを同期させるように構成された処理回路とを具備しているシステム。
【請求項14】
前記処理回路はさらに同期されたクロックに関して外部信号源から受信された信号の到着時間(TOA)を決定するように構成されている請求項13記載のシステム。
【請求項15】
さらに,n個の到着時間測定から無線通信装置のn次元の位置を決定する制御プロセッサを具備し、前記到着時間測定はn個の衛星から受信された信号の到着時間を示している請求項14記載のシステム。
【請求項16】
制御プロセッサは基地局トランシーバサブシステム内に位置している請求項15記載のシステム。
【請求項17】
制御プロセッサは基地局制御装置内に位置している請求項15記載のシステム。
【請求項18】
制御プロセッサは専用の位置決定装置内に位置している請求項15記載のシステム。
【請求項19】
グローバル位置決定システム(GPS)時間に対して無線通信装置内で行われる到着時間測定を同期させるシステムにおいて、
システムは受信機と時間/周波数回路とを具備し、
a)前記受信機は、
GPS時間に同期された外部信号源から信号を受信するように構成され、外部信号源から受信された信号は、外部信号源と受信機との間で送信された信号が受ける遅延量が決定できるような指示と、GPS時間の指示を含む信号が基地局から送信される時間におけるGPS時間の指示とを含んでおり、
b)前記時間/周波数回路は、
クロック装置と、
受信機によって受信された信号の到着時間をクロックに関して決定し、外部信号源と無線通信装置との間で送信された信号が受けた遅延に等しい量だけ到着時間を調節するように構成された処理回路とを具備しているシステム。
【請求項20】
受信機とプロセッサとを具備し、
a)前記受信機は、
i)Lを1より大きい正の整数として、無線通信装置がL個の同期された第1のシステムのソースから送信されたL個の第1のシステムの信号を受信した時間を示している第1のシステムの到着時間(TOA)情報と、
ii) Mを1より大きい正の整数として、無線通信装置がM個の同期された第2のシステムのソースから送信されたM個の第2のシステムの信号を受信した時間を示す第2のシステムの到着時間情報(TOA)とを受信するように構成され、
b)前記プロセッサは受信機に結合され、第1のシステムのTOA情報および第2のシステムのTOA情報からn次元の位置解を計算するように構成され、nは(L+M−2より大きくないように選定されている、無線位置決定機能。
【請求項21】
第1のシステムは衛星位置決定システムであり、第1のシステムソースは衛星であり、第2のシステムは通信システムであり、第2のシステムソースは基地局である請求項20記載の無線位置決定機能。
【請求項22】
プロセッサはさらに、
a)第1のシステムのTOA情報から第1のシステム信号の各対間の到着時間差(TODA)測定を決定し、
b)第2のシステムのTOA情報から第2のシステム信号の各対間の到着時間差(TODA)測定を決定し、
c)第1のシステムの信号間のP個のTDOA測定および第2のシステムの信号間のQ個のTDOAから、n次元の位置解を計算するように構成され、nは(P+Q)よりも大きくはなく、PおよびQはそれぞれ正の整数である請求項20記載の無線位置決定機能。
【請求項23】
第1のシステムは衛星航法位置決定システムであり、第2のシステムは通信システムであり、通信システム内の各他の基地局に各基地局を同期することが可能にされている請求項22記載の無線位置決定機能。
【請求項24】
受信機とプロセッサとを具備し、
a)前記受信機は、
i)Lを1より大きい正の整数として、無線通信装置がL個の同期された第1のシステムのソースから送信されたL個の第1のシステムの信号を受信した時間を示す第1のシステムの到着時間(TOA)情報と、
ii) Mを1より大きい正の整数として、無線通信装置がM個の同期された第2のシステムのソースから送信されたM個の第2のシステムの信号を受信した時間を示す第2のシステムの到着時間(TOA)情報と、
iii)Iを1より大きい正の整数として、無線通信装置がI個の同期された第3のシステムのソースから送信されたI個の第3のシステムの信号を受信した時間を示す第3のシステムの到着時間(TOA)情報とを受信するように構成され、
b)前記プロセッサは受信機に結合され、第1のシステムのTOA情報と、第2のシステムのTOA情報と、第3のシステムのTOA情報とからn次元の位置解を計算するように構成され、nは(L+M+I−3)より大きくないように選定され、過剰決定された3次元解が3より大きい(L+M+I−3)に対して与えられる無線位置決定機能。
【請求項25】
グローバル位置決定システム(GPS)衛星に対してサーチするためにサーチウインドウの中心を決定する無線通信装置において、
a)GPS衛星のタイミングを示す信号を含んでいる信号を基地局から受信する受信機と、
b)GPS受信機/時間ユニットと、
c)前記受信機およびGPS受信機/時間ユニットに結合され、GPS衛星の受信されたタイミングを使用して衛星のサーチを促進するためにサーチウインドウの時間的中心を決定するように構成されている制御プロセッサとを具備している無線通信装置。
【請求項26】
サーチウインドウの中心は、基地局が無線通信装置と通信している基地局内の特定のセクタを使用してさらに決定される請求項25記載の無線通信装置。
【請求項27】
情報は、サーチウインドウの中心がさらに、無線通信装置によって受信された他の基地局からの信号により信号強度を使用して決定される請求項25記載の無線通信装置。
【請求項28】
情報はさらに、2以上の基地局から送信された信号の間の無線通信装置における到着時間の差に基づいている請求項25記載の無線通信装置。
【請求項29】
情報はさらに、無線通信装置が最近どこにあったかの以前の知識に基づいている請求項25記載の無線通信装置。
【請求項30】
a)少なくとも2つの非同期基地局から信号を受信するように構成され、少なくとも2つの非同期基地局の間の到着時間差(TDOA)は本質的に知られた値である受信機と、
b)クロック装置と、
c)受信機およびクロック装置と結合されている処理回路とを具備し、この処理回路は、
i)基地局からの信号の到着時間を測定し、
ii)TDOAが知られている基地局の少なくとも各対のTDOAを測定し、
iii)TDOAが知られている基地局の各対の測定されたTDOAと既知のTDOAとの間の差を計算するように構成されている遠隔同期ステーション。
【請求項31】
さらに、計算された差を送信する送信機を含んでいる請求項30記載の遠隔同期ステーション。
【請求項32】
クロック装置が前記処理回路中に含まれている請求項30記載の遠隔同期ステーション。
【請求項33】
既知のTDOAは受信機によって受信される請求項30記載の遠隔同期ステーション。
【請求項34】
a)入力ポートと、
b)出力ポートと、
c)入力ポートおよび出力ポートに結合されている処理回路とを具備し、この処理回路は、
i)既知の位置を有する複数の信号源から送信された信号が1つの無線通信装置で受信され、それらの信号源の少なくともいくつかのものは基地局信号源である、前記信号の受信された時間を示す到着時間情報を入力ポートから受信し、
ii) 基地局信号源の各対に対して、測定されたTDOAと既知のTDOAとの間の差を表す値を入力ポートから受信し、
iii)各信号源に対して、受信された到着時間情報から信号源の各対間のTDOAを計算し、
iV) 基地局信号源の各対に対して、測定されたTDOAと既知のTDOAとの間の差を使用して基地局信号源の各対間のTDOAを調整し、
v)差が受信された信号源の各対に対して調整されたTDOAを使用し、差が受信されなかった信号源の各対に対して調整されていないTDOAを使用して無線通信装置の位置を計算する無線位置決定機能。
【請求項35】
a)信号が基地局から送信され、伝送遅延が既知の値を有しているとき、基地局から信号を受信するように構成されている受信機と、
b)各基地局に存在するクロックと同期されたクロック装置と、
c)受信機およびクロック装置と結合されている処理回路とを具備し、この処理回路は、
i)基地局からの信号の到着時間を測定し、
ii)到着時間と基地局から送信された信号の伝送時間との差として伝送遅延を計算し、
iii)計算された伝送遅延と既知の伝送遅延との間の差を計算するように構成されている遠隔同期ステーション。
【請求項36】
さらに、処理回路に結合され、実際の遅延と既知の遅延との間の計算された差を送信するように構成されている送信機を備えている請求項35記載の遠隔同期ステーション。
【請求項37】
a)基地局が既知の位置に配置され、無線通信装置と基地局との間の信号の伝搬に必要な時間量を示す遅延の指示を含む信号を受信するように構成されている受信機と、
b)この遅延の指示に基づいてグローバル位置決定システム(GPS)のサーチウインドウの大きさを決定するように構成されている処理回路とを具備している無線通信装置。
【請求項38】
a)基地局の位置と、基地局と無線通信装置との間の近似的な距離とが知られている基地局からの信号を受信するように構成されている受信機と、
b)この位置および基地局と無線通信装置との間の近似的な距離に基づいてグローバル位置決定システム(GPS)のサーチウインドウの中心を決定するように構成されている処理回路とを具備している無線通信装置。
【請求項39】
a)コード分割多元アクセス(CDMA)信号を受信するように構成されている受信機と、
b)グローバル位置決定システム(GPS)の信号を受信する受信機と、
c)CDMA信号をCDMAコードとを相関させ、GPS信号とGPSコードとを相関させる処理回路とを具備している無線通信装置。
【図1】

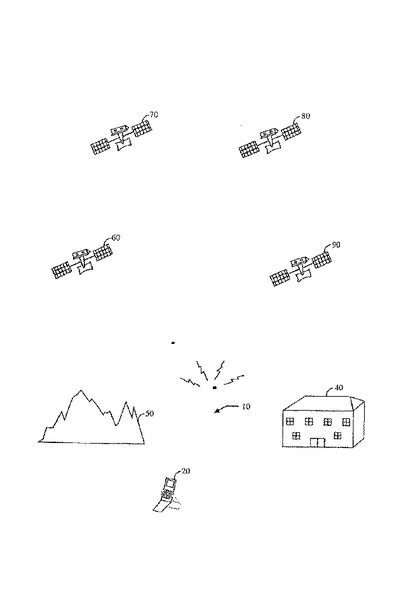
【図2】
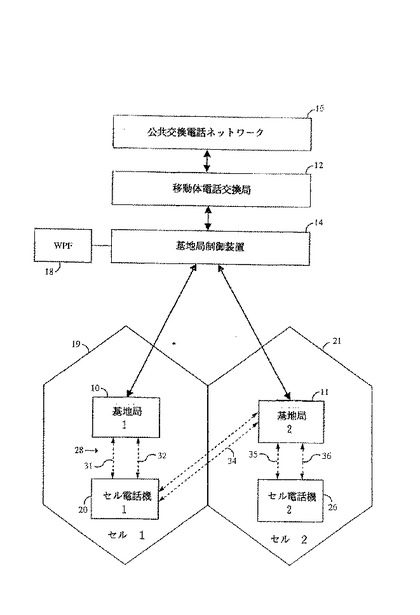
【図3】
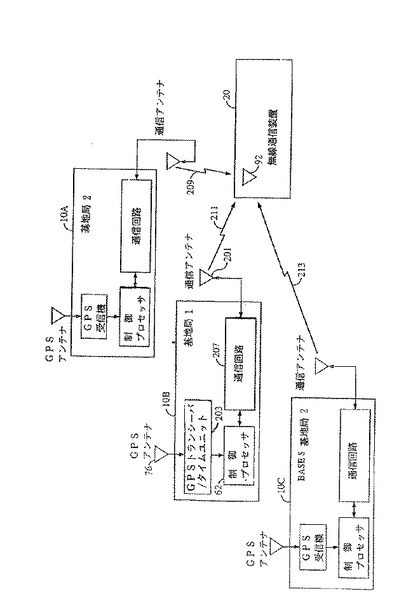
【図4】
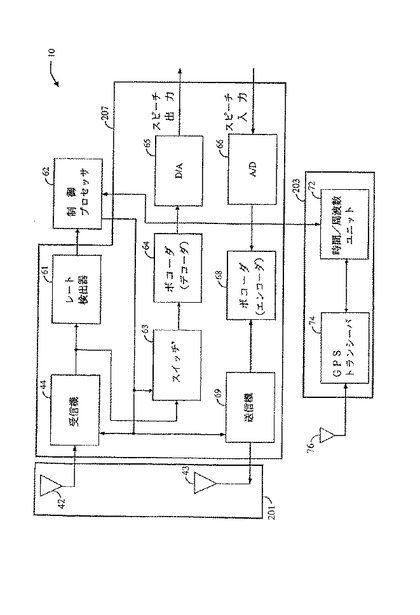
【図5】
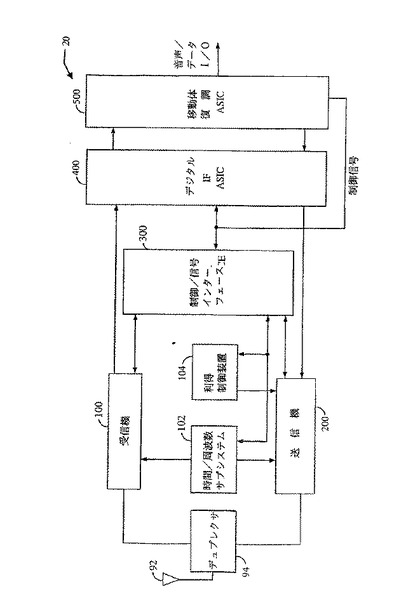
【図6】
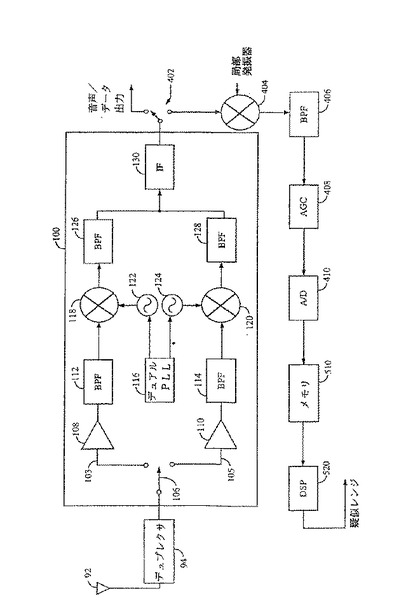
【図7】
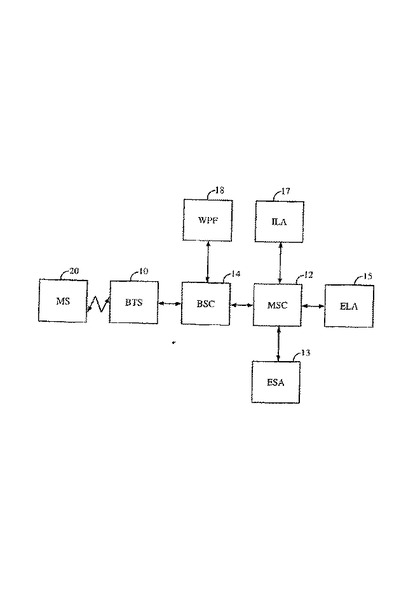
【図8】
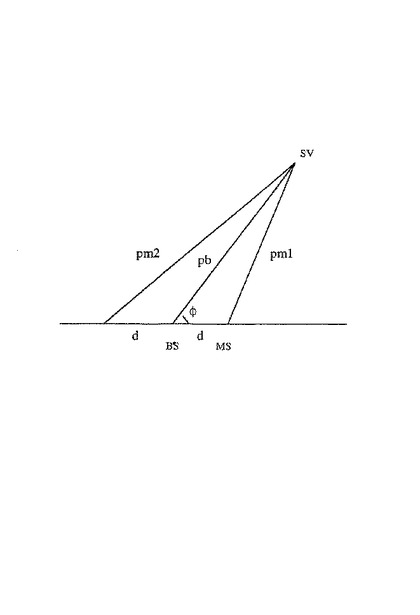
【図9】
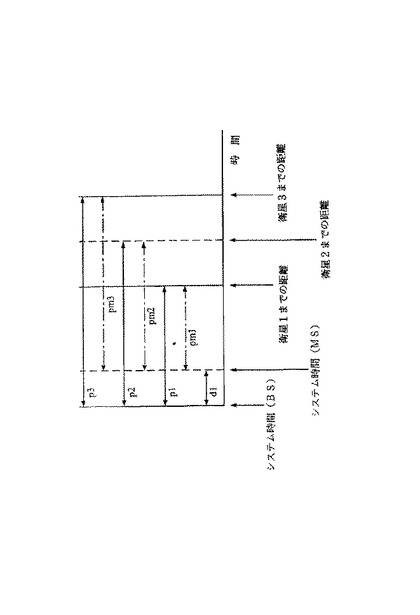
【図10】
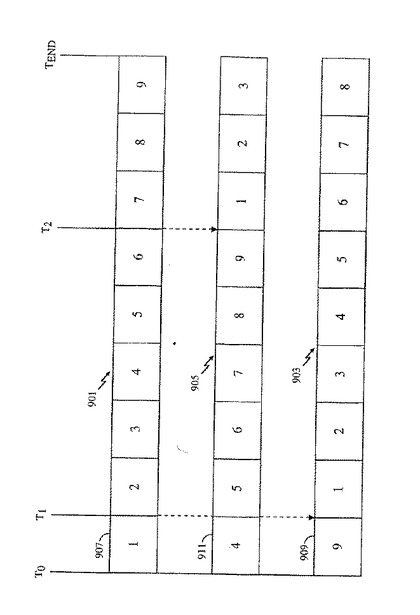
【図11】
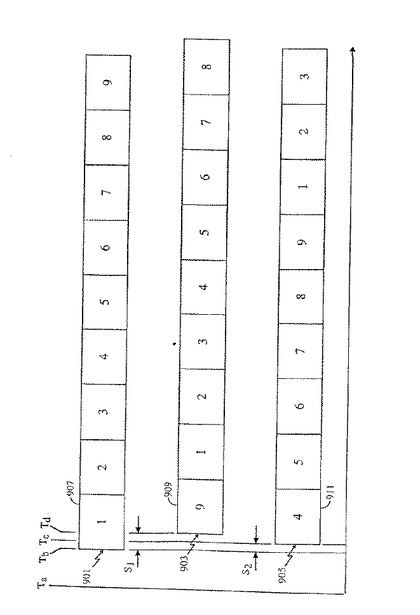
【図12】
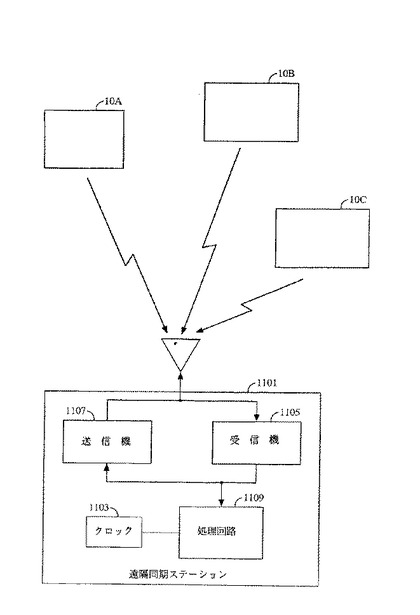
【図13】
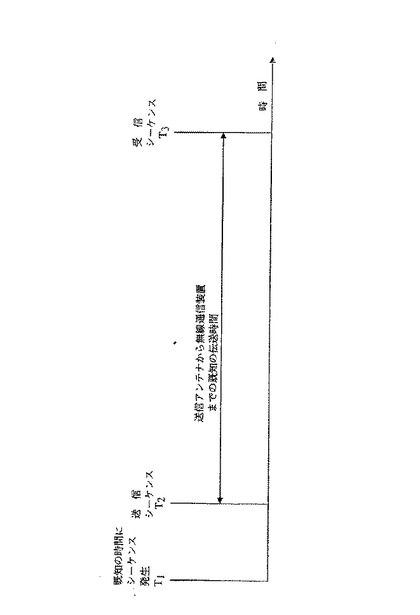
【図14】
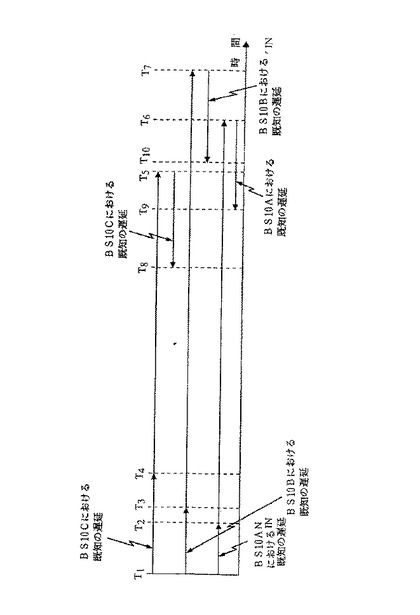
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−227086(P2011−227086A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−120295(P2011−120295)
【出願日】平成23年5月30日(2011.5.30)
【分割の表示】特願2001−535127(P2001−535127)の分割
【原出願日】平成12年10月27日(2000.10.27)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2011−120295(P2011−120295)
【出願日】平成23年5月30日(2011.5.30)
【分割の表示】特願2001−535127(P2001−535127)の分割
【原出願日】平成12年10月27日(2000.10.27)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]