
少なくとも一つのスライド方向に沿って移動可能な物体の位置を計測するための装置
本発明は、少なくとも一つのスライド方向に沿って移動可能な物体の位置を計測するための装置に関し、各スライド方向に対応して、当該の空間方向に沿った物体の位置を測定するための測長器が配備されており、当該の測長器(2,3)の第一の構成部品として、測定すべき物体(10)のスライド方向(x,y)に沿って延びる少なくとも一つの基準尺(20,30)が配備され、当該の測長器(2,3)の第二の構成要素として、基準尺(20,30)を走査するための走査ヘッド(25,35)が配備されており、その結果測定すべき物体(10)の当該のスライド方向(x,y)に沿った走査ヘッド(25,35)に対する基準尺(20,30)の位置の変化を検出することが可能であり、当該の測長器(2,3)の二つの構成要素(20,25;30,35)の中の一方が、測定すべき物体(10)が動いた場合に、その物体と一緒に当該のスライド方向(x,y)に沿って動かされ、当該の測長器(2,3)の測定方向(x,y)に沿った測定すべき物体(10)と一緒に移動可能な当該の測長器(2,3)の構成部品(20,30)と測定すべき物体(10)との距離を計測するための機器(12,23;13,33)が配備されている。本発明では、測定すべき物体(10)と一緒に移動可能な当該の測長器(2,3)の構成部品(20,30)と測定すべき物体(10)との距離を計測するための機器(12,23;13,33)が、第一の構造グループとしての測定目盛(12,13)と、それに対応する第二の構造グループとしての測定ヘッド(23,33)とを備えており、二つの構造グループ(12,23;13,33)の中の一方が、測定すべき物体(10)に配備されており、二つの構造グループ(12,23;13,33)の中の他方が、測定すべき物体(10)と一緒に移動可能な測長器(2,3)の構成部品(20,30)に配備されている。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、請求項1の上位概念にもとづく少なくとも一つのスライド方向に沿って(即ち、第一の方向に沿って、並びに場合によっては、第二及び/又は第三の方向に沿って)移動可能な物体の位置を計測するための装置に関する。
【背景技術】
【0002】
そのような装置は、測長器の第一の構成要素として、それに対応するスライド方向、即ち、例えば、第一の方向に沿って延びる、少なくとも一つの基準尺と、測長器の第二の構成要素として、それに対応する基準尺を走査するための走査ヘッドとを有し、基準尺は、第一の方向に沿って走査ヘッドに対して相対的に移動し、その結果第一の方向に沿った走査ヘッドに対する基準尺の位置の変化を検出することが可能であり、基準尺と走査ヘッドの中の何れか一方が、測定すべき物体と一緒に第一の方向に沿って動き、更に、測定すべき物体と一緒に移動可能な測長器の構成要素と各物体との間の距離を計測するための機器が配備されている。
【0003】
特許文献1により周知である変位計の形式の冒頭に述べた種類の装置は、シャーシと、センサーと測定すべき物体の表面(鏡面)の間の距離を検出するためのフォーカスセンサーの形式の非接触式センサー(距離センサー)と、連結部材を介してフォーカスセンサーと固く連結された直線的なスケールと、シャーシに固定された、直線的なスケールの目盛区分を読み取るための機器と、フォーカスセンサーと直線的なスケールを動かして、それにより直線的なスケールとフォーカスセンサーを一緒にシャーシに対して相対的に移動させるためのアクチュエータと、アクチュエータを作動させるための制御回路とを備えている。
【0004】
この場合、直線的なスケール(基準尺)とそれに対応する直線的なスケールの目盛区分を読み取るための機器(走査ヘッド)とは、測定すべき物体の動きを検出する役割を果たしており、直線的なスケールは、各物体と一緒に移動することが可能であり、それに対応する直線的なスケールの目盛区分を読み取るための機器は、位置を固定した形で変位計のシャーシと連結されている。直線的なスケールに配備された、直線的なスケールと測定すべき物体の表面の間の距離を計測するための機器としてのフォーカスセンサーの形式の非接触式センサーを用いて、直線的なスケールと測定すべき物体の間の距離を求めることができる。そうすることによって、直線的なスケールに対応するフォーカスセンサーによって、直線的なスケールと測定すべき物体の間に存在する距離を検出することができるので、測定すべき物体が動いた場合の直線的なスケールのトラッキングに対して、特に高い要件を課する必要がなくなっている。
【0005】
測定すべき物体又は観察している物体の表面の動きは、直線的なスケールとそれに対応する直線的なスケールの目盛区分を読み取るための機器との相対的な動きにもとづき検出され、その場合直線的なスケールのトラッキング誤差は、直線的なスケールと測定すべき物体又はその観察している表面の間の距離に関するフォーカスセンサーの測定結果にもとづき補正(補償)することが可能である。
【0006】
この周知の変位計では、周囲の空気に関するパラメータの変動(空気パラメータの変化)のために、特に、屈折率の変動のために、非接触式センサーの測定結果が不確実となり、そのため高精度な測定に関して十分に正確でないという欠点を有する。
【特許文献1】ドイツ特許第4219311号明細書
【特許文献2】欧州特許公開第0793870号明細書
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明の課題は、冒頭に述べた種類の少なくとも一つのスライド方向に沿って移動可能な物体の位置を計測するための装置を更に改善することである。
【課題を解決するための手段】
【0008】
この課題は、本発明にもとづき、請求項1の特徴を有する装置を実現することによって解決される。
【0009】
それによると、冒頭に述べた種類の装置において、一方における測定すべき物体と一緒に移動可能な測長器の構成要素と他方における測定すべき物体自体の間の距離を計測するための装置が、第一の構造グループとしての測定目盛と、それに対応する第二の構造グループとしての測定ヘッドとを備えており、二つの構造グループの中の一方が、測定すべき物体に配備されており(即ち、それと一緒に移動する形で連結されており)、二つの構造グループの中の他方が、測定すべき物体と一緒に移動可能な測長器の構成要素に配備されている(即ち、それと一緒に移動する形で連結されている)ものと規定される。
【0010】
本発明による解決策は、測定すべき物体と測定すべき物体と一緒に移動可能な(スライド可能な)測長器の構成要素の間の距離を計測するために、更に別の測長器を使用し、その測長器が、それに対応する測定ヘッドを用いて測定目盛を走査するとの原理にもとづくという利点を有する。そうすることによって、測定結果が、周囲の空気に関するパラメータに依存しなくなる。
【0011】
この場合、本発明による一つ以上のスライド方向に沿って移動可能な物体の位置を計測するための装置は、狭い意味での測定、例えば、物体上に設けられた交差格子の校正のために配備されるだけでなく、(検出したポジション値を制御のために使用する制御機器との協力した動作によって)測定すべき物体を加工する場合に、その物体の位置を定めるために使用することも可能であり、例えば、感光性にコーティングされた板の構造を露光(フォトリソグラフィー)するか、或いはレーザー又はフライスで切削するために使用することも可能である。
【0012】
本発明の有利な改善構成では、本発明による装置は、二つの直線的な独立した(特に互いに直角の)スライド方向に沿って移動可能な物体、例えば、測定テーブル上に固定された物体の位置を計測する役割を果たす。その場合、二つの方向の何れも、その方向に対応して、当該のスライド方向に沿って延びる第一の構成要素としての基準尺と、その基準尺を走査するために配備された第二の構成要素としての走査ヘッドとを備えた一つの測長器が配備されており、そのため二つのスライド方向の何れに対しても、それぞれ対応する基準尺に関する走査ヘッドの位置の変化を検出することが可能であり、二つの測長器の何れにおいても、基準尺と走査ヘッドの中の何れか一方が測定すべき物体と一緒に当該のスライド方向に沿って動く。更に、二つの測長器の何れにも、当該のスライド方向に沿った測定すべき物体と一緒に移動可能な当該の測長器の構成要素と測定すべき物体の距離を計測するための機器が組み込まれている。この場合、それぞれ当該のスライド方向に沿った測定すべき物体と一緒に移動可能な当該の測長器の構成要素と測定すべき物体自体の間の距離を計測するための二つの機器は、それぞれ第一の構造グループとしての測定目盛と、それに対応する第二の構造グループとしての測定ヘッドとを有し、それぞれ二つの構造グループの中の一方が測定すべき物体に配備されており、二つの構造グループの中の他方が当該のスライド方向に沿って測定すべき物体と一緒に移動可能な測長器の構成要素と連結されている。
【0013】
そのような装置を用いて、平面内における測定すべき物体の任意の動きを検出することができ、その動きは、正にそれぞれ二つの測長器の中の一方によって検知される、二つの直線的な独立したスライド方向に沿った動きを重ね合わた(組み合わせた)動きとしてそれぞれ表すことが可能である。
【0014】
本発明の前述した改善構成の有利な実施形態では、特に、測長器の走査ヘッドである、測定すべき物体と一緒に移動することができない測長器の二つの構成要素は、互いに固く連結されている。
【0015】
そのため、有利には、測長器の基準尺は、測定すべき物体と一緒に移動可能な測長器の構成要素としての役割を果たす。そこには、又もや有利には、測定すべき物体上に配備された測定目盛を走査する役割を果たす測定ヘッドが、詳しくは、特に、一緒に動くように固く連結された形で配置されている。
【0016】
少なくとも一つの(有利には、測定すべき物体と一緒に移動可能な)基準尺と少なくとも一つの(有利には、測定すべき物体上に配備された)測定目盛の両方とも、有利には、それぞれ周期的な目盛区分の形の増分トラック(増分目盛)を有する。
【0017】
測定すべき物体は、例えば、所謂測定テーブル上に固定された測定板とすることができ、その測定板に対応して、平面内を移動することが可能であり、測定板上に配備された測定尺を走査し、それによって当該の平面内における測定板の動きを検出することができる走査機器が配備されている。この場合、本発明による少なくとも一つのスライド方向に沿って、特に、一つの平面内に延びる二つのスライド方向に沿って移動可能な物体、ここでは測定板の位置を計測するための装置は、測定板とそれに対応する走査機器とから成る位置測定装置を検査する役割と、場合によっては、それを校正する役割とを果たす。
【0018】
そのために、測定すべき物体、即ち、測定板と一緒に移動することができない当該の測長器の構成要素、即ち、特に、二つの測長器の測定ヘッドは、測定板を走査する役割を果たす走査機器と固く連結されている。
【0019】
測定すべき物体を少なくとも一つのスライド方向(第一の方向及び/又は第二の方向)に沿って動かすことができるように、一方の側の測定すべき物体自体には、所定の各スライド方向に対して、当該の移送方向に沿った測定すべき物体の所望の動きを実現することができる駆動部が配備されており、その場合当該の測長器の動く構成要素が受動的に一緒に牽引されるようにするか、或いは当該の測長器に独自の駆動部を組み込むことが可能であり、そこでは一方における測定すべき物体に組み込まれた駆動部と他方における当該の測長器に組み込まれた駆動部とは同期しており、測定すべき物体が動いた場合に、測長器の移動可能な構成要素がそれぞれほぼ同じ道程だけ一緒に動かされるようになっている。この場合、測定すべき物体と一緒に移動可能な当該の測長器の構成要素とその物体自体の間の距離を計測するために組み込まれた機器によって、場合によっては起こる得る偏差を検出して、その偏差を補償することができる。
【0020】
本発明の別の実施構成では、測定すべき物体と一緒に移動可能な当該の測長器の構成要素は、駆動部によって動かされるとともに、測定すべき物体を牽引する。この実施構成は、測定すべき物体自体において熱の発生が起こらないという利点を有する。
【0021】
それに代わって、各スライド方向に対して、測定すべき物体から離れているが、それと連結された別個の駆動スライダーを測定すべき物体に配備することができ、その駆動スライダーは、当該のスライド方向に沿った動きに対して、測定すべき物体を一緒に移動させるものである。
【発明を実施するための最良の形態】
【0022】
本発明の更なる詳細及び利点は、以下の図面にもとづく実施例の説明によって明らかとなる。
【0023】
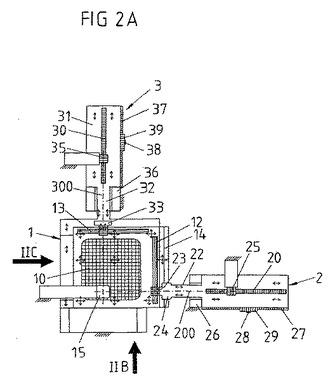
図1と図2a〜2cには、十字交差式ガイド11,16を用いて平面(x,y平面)内を互いに直角な二つの空間方向(スライド方向)x又はyに沿って移動可能な(スライド可能な)、測定テーブル上に固定された、測定すべき物体としての測定板10を備えた測定テーブル1が図示されており、この実施例において、その測定板の十字交差式ガイド11,16と逆の表面上には、走査機器15によって走査可能な、例えば、十字目盛の形式の測定尺が配備されている。走査機器15は、位置を固定して配置されている、即ち、測定テーブル1の測定板10と一緒に動かず、そのため走査機器15を用いて測定板10上に配備された測定尺を走査することによって、二つの空間方向x,yの各々に沿った測定板10の動きの大きさを検出することが可能である。
【0024】
十字交差式ガイド11,16は、第二の空間方向yに沿って移動可能なテーブル構成要素(下方の板16)と、その上の第一の空間方向xに沿って移動可能なテーブル構成要素(上方の板11)とを有し、後者は、結局二つの空間方向x,yに沿って移動することが可能であり、測定板10を支えている。
【0025】
ここで、更に、二つの空間方向x,yの各々に沿った測定板10の動きの大きさを計測するために、二つの測長器2,3が配備されている。これらは、一方において、二つの空間方向x,yに沿った測定板10の動きの大きさを走査機器15と独立して、並びにそれに追加して検出し、それによって走査機器15とそれに対応する測定板10の測定尺を用いて行われる測定の正確さを検査する役割を果たすことができる。しかし、それに代わって、二つの測長器2,3は、二つの空間方向x,yに沿った測定板10の動きを単独で計測するために配備することもできる。その場合二つの測長器2,3は、それぞれ二つの空間方向x,yの中の一つに対応しており、対応する各空間方向x又はy(当該の測長器の測定方向)に沿った測定板10の動きを検出する役割を果たしている。
【0026】
二つの測長器2,3の各々は、それぞれ位置を固定されたガイド部材26又は36と、その上を当該の空間方向x又はyに沿って移動する長手方向に動くガイド部材21,31とから構成される長手方向ガイド21,26又は31,36を有する。当該の測長器2又は3の動くガイド部材21,31は、それぞれ対応する空間方向(測定方向)x又はyに沿って延びる基準尺20又は30を支えており、当該の基準尺20又は30には、当該の空間方向x又はyに沿って周期的に順番に配置された多くの目盛区分から成る(それぞれ少なくとも一つの基準マークを備えた)周期的な(増分)測定目盛が設けられている。そのため、当該の測長器2,3の測定方向x又はyは、当該の測長器2,3の動くガイド部材21又は31の移動方向と一致する、当該の測長器2,3の基準尺20又は30が延びる方向によって決まる。
【0027】
それに代わって、基準尺20,30には、それぞれ動作開始後直ちに有効な位置を供給し、そのため基準マークに対する照合動作を必要としない絶対符号を設けることもできる。
【0028】
走査機器15又は正確にはその測定板10を走査するために配備されたヘッドは、有利には、二つの基準尺20,30の長手軸200,300の交点、即ち、二つの基準尺20,30が測定テーブル1、特に、測定板10の上を直線的に延長された線の交点に配置される。そのような走査機器15に関する基準尺20,30の構成は、十字交差式ガイド11,16の角度誤差に関係無く測定する役割と、場合によっては、位置を定めることができる役割を果たしており、それは、アッベ形式の構成に対応するものである。
【0029】
二つの測長器2,3の基準尺20,30の走査は、それぞれに対応する位置を固定された、即ち、測定テーブル1と一緒に移動することができない走査ヘッド25又は35を用いて行われ、それによって、当該の測定方向x又はyに沿った、測長器2,3の当該の長手方向に動くガイド部材21,31が測定テーブル1と一緒に動く大きさを求めることが可能となる。
【0030】
二つの長手方向に動くガイド部材21,31の中の一方は、連結部材22又は連結部材22に配備された握りつかみ24を介して、握りつかみ24が測定テーブル1の対応する固定領域14を把持する形で測定テーブル1と連結されている、正確にはその上方の板11と連結されている、従って(測定テーブル1又はその上方の板11)を介して測定板10と連結されている。
【0031】
この場合、測長器2の握りつかみ24とそれに対応する測定テーブル1の固定領域14は、測定テーブル1が当該の測長器2の測定方向xに沿って動いた際に、動くガイド部材21とそれに対応する測長器の動く構成要素としての測長器2の基準尺20とが、測定板10と一緒に測定方向としての第一の空間方向xに沿って動くように構成されている。しかし、それとは逆に、当該の測長器2の動くガイド部材21は、測定板10が当該の測長器2の測定方向xに対して直角に延びる別の空間方向yに沿って動いた際には、一緒に動かない。
【0032】
そのため、第一の空間方向xに対応する測長器2と測定テーブル1との握りつかみ24を介した連結は、測定板10が当該の第一の空間方向xに沿って動いた場合にのみ、動くガイド部材21が一緒に動くようにするが、測定板10が別の第二の空間方向yに沿って動いた場合には一緒に動かないようにすることが必要であり、その理由は、第一の測長器2と測定テーブル1との連結が、二つの空間方向x,yに沿って動く測定テーブルの上方の板11を介して行われるとともに、その板が更に第二の空間方向yに沿って動く下方の板16の上において第一の空間方向xに沿って動くように支持されているためである。
【0033】
それに対して、第二の空間方向yに沿った測定板10の動きを求めるための第二の空間方向yに対応する測長器3の連結は、長手方向に動くガイド部材31の連結部材32を第二の空間方向yに沿ってのみ移動可能なテーブル構成要素、即ち、下方の板16と直接(固く)連結することによって行われる。その場合、連結部材32を介してガイド部材31を固定するためのテーブル構成要素16は、何れにせよ測定方向として第二の測長器3に対応する空間方向yに沿ってのみ動くことができるので、当該のテーブル構成要素16の別の方向xに沿った上記の動くガイド部材31に対する相対的な動きを可能とする、握りつかみを介した連結を設けることは不要である。
【0034】
即ち、二つの測長器2,3は、(一方において握りつかみ24とそれに対応する測定テーブル1又は上方の板11の固定領域14とを介して、他方において測定テーブルの下方の板16との直接的な連結箇所を介して)測定テーブル1の測定板10と(間接的に)連結されており、測定板10が当該の測長器2,3の測定方向x又はyに対応する方向に沿って動いた場合に、長手方向に動くガイド部材21又は31とそれに対応する測長器2,3の基準尺20又は30とが測定板10と一緒に動かされるようになっている。それに対して、測定テーブル1の上方の板11と固定されている測定板10が、当該の測長器2,3の測定方向x又はyに対して直角に延びる空間方向y又はxに沿って動いた場合、当該の測長器2,3の動くガイド部材21又は31は、測定テーブル1とは一緒に動かない。そのために、測定テーブル1の固定領域14は、当該の測長器2に対応する握りつかみ24と長手方向に動く形で係合する長手方向のガイドとして構成されており、そのため測長器2に対応する測定テーブル1の固定領域14が延びる方向は、それに対応する測長器2の測定方向xに対して直角に延びている。
【0035】
即ち、結局は、当該の測長器2,3の測定方向x又はyに対して垂直な方向に沿った、二つの測長器2,3の各々に関する前記の測定テーブル1の相対的な動きが可能となり、測長器2,3は、当該の測長器2,3の測定方向x又はyに関する測定板10の横方向の動きから切り離されることとなる。
【0036】
それに代わって、第一の測長器2に関して図2a〜2cに図示されているのと同様の手法により、第二の測長器3を上方の板11と連結することによって、二つの長手方向に動くガイド部材21,31も、それぞれ握りつかみを介して二つの空間方向x,yに沿って動く測定テーブル1の上方の板11と連結することもできる。
【0037】
図1,2a,2b及び2cに図示されている実施例では、測定テーブル1は、二つの空間方向x,yに沿った動きのために直接駆動されず、むしろ当該の測長器2,3の長手方向に動くガイド部材21又は31をそれと対応する位置を固定されたガイド部材26,36に関して動かすことが可能な駆動手段が二つの測長器2,3の各々に組み込まれている。当該の駆動手段は、当該の測長器2,3の位置を固定されたガイド部材26又は36上に配置された、或いは形成された、当該の測定方向x又はyに沿って延びるラック27,37を備えており、そのラックには、当該の長手方向に動くガイド部材21又は31上の回転可能な軸28又は38と軸支された歯車29又は39が係合している。当該の駆動軸28又は38をそれに対応する(図面には一緒に図示されていない)駆動モーターによって回転させることによって、当該の長手方向に動くガイド部材21又は31と回転可能な形で軸支された歯車29又は39の回転運動が実現されており、そのため歯車の外歯は、それに対応する位置を固定されたガイド部材26,36のラック27又は37上を転がることとなる。そうすることによって、当該の歯車29又は39の回転方向に応じて、位置を固定されたガイド部材26,36に関する当該の測長器2,3の長手方向に動くガイド部材21,31のそれぞれ対応する空間方向又は測定方向x,yに沿った相対的な動きが実現され、そのため測定テーブル1を介して測長器2,3の長手方向に動くガイド部材21,31と連結された測定板10が一緒に動かされることとなる。それに代わって、相対的な動きを実現するために、測長器2,3に、それぞれリニアモーターを組み込むこともできる。
【0038】
この場合、前述したラック駆動部は、それに対応する位置を固定されたガイド部材26又は36に関する当該の長手方向に動くガイド部材21又は31の直線的な動きを実現することが可能である通常の直線的な駆動部を代表する役割を果たすだけである。従って、当該の長手方向に動くガイド部材21,31の長手方向の動きを実現するためのラック駆動部として、それ以外の直線的な駆動部を使用することもできるが、そのような駆動部は、通常簡単に図面に図示することができない。使用可能な有利な直線的な駆動部に関しては、例えば、特許文献2を参照されたい。
【0039】
この場合、図1〜2cに図示されている構成は、二つの空間方向x,yに沿った測定テーブル1と二つの基準尺20,30の動きを実現するための駆動手段が測定テーブル1自体の測長器2,3に組み込まれているために、熱の発生が起こらないという利点を有する。
【0040】
測定テーブル1の上には、正確には、その測定板10を支える上方の板11の上には、測定板10と隣接して、二つの測長器2,3の各々に対応する二つの増分測定目盛12,13が延びている。これらの増分測定目盛12,13は、それぞれに対応する測長器2又は3の測定方向x又はyに沿って順番に配置された多くの目盛区分から構成されており、それらの目盛区分は、当該の連結部材22,32を介して当該の測長器2,3の長手方向に動くガイド部材21,31と固く連結された測定ヘッド23又は33によって走査することが可能である。測長器2,3の基準尺20,30と一緒に移動可能な測定ヘッド23,33を用いて、測定テーブル1上に測定板10と隣接して配備された測定目盛12,13を走査することによって、当該の測定方向x又はyに沿った基準尺20,30と測定テーブル1(又はその上方の板11、従って、測定板10)の距離の変化を検出することができ、その変化は、例えば、遊びを含めて、握りつかみ24とそれに対応する固定領域14との協働作用によって追従することができる。そうすることによって、測長器2,3の当該の基準尺20,30と測定テーブル1の間の距離に関する変動を補償することができる。言い換えると、一方及び/又は他方の空間方向x,yに沿った測定板10の動きの大きさを測定することは、当該の基準尺20又は30をそれに対応する走査ヘッド25,35を用いて走査することによって得られた当該の測長器2又は3の測定結果と、測定板と隣接して配備された測定目盛12,13を当該の測定ヘッド23,33を用いて走査することによって検出される、場合によっては、その一方又は他方の方向x,yに沿った測定板10の動きと並行して生じる、当該の基準尺20,30と測定板10の間の距離の変化とから構成される。この場合、測定板10と隣接して配備された測定目盛12,13は、所謂ストレートバーとして、直線からの偏差と十字交差式ガイド11,16の場合によっては起こる緩みが測定結果に対して影響することを防止する役割も果たしている。
【0041】
当該の空間方向x,yに関するポジション値は、それぞれ当該の測長器2,3の測定結果xl 又はyl と当該の測長器2,3の基準尺20,30と測定テーブル1又は正確には測定板10の間の距離の変化を検出するための手段12,23;13,33の測定結果xg 又はyg との合計xl +xg 又はyl +yg として得られる。
【0042】
測定板10上に配備された、対応する走査機器15を用いて走査される(例えば、交差格子目盛の形式の)測定尺の正確さを検査するために測長器2,3を使用する場合、測定板10の測定尺に対応する走査機器15は、有利には、二つの測長器2,3の走査ヘッド25,35と固く連結されている。更に、走査機器15は、有利には、二つの測長器2,3の測定軸の交点と一致する測定板10の上方の位置に有る。
【0043】
しかし、図1〜2cに図示されている位置測定構成は、測定板10を校正するための測定構成としての役割だけでなく、テーブル1を用いて、例えば、照明ユニット、レーザー機器、フライスなどの加工ユニットを位置決めするとともに、そのような加工ユニットを用いて加工すべき物体に対して高い精度で位置決めするための構成としての役割も果たすことができる。
【0044】
図3a,3b,4a及び4bには、図1〜2cの構成と異なる変化形態、詳しくは、一方における測定テーブル1又は測定板10と他方における基準尺20,30の共通した動きを生じさせる駆動手段に関して異なる変化形態が図示されている。以下において、それぞれ図2bの側面図を出発点とする図3a〜4bにもとづき、例えば、第一の空間方向x(スライド方向)に沿った測定テーブル1又はその上方の板11、従って、測定板10の位置を計測することが可能な測長器2にもとづき、そのような変化形態を説明する。しかし、以下における考察は、それぞれ第二の空間方向yに沿った測定テーブル1の上方の板11又は測定板10の位置を計測するために配備された第二の測長器3に対しても同様に有効である。
【0045】
図3aに図示されている構成は、図1〜2cに図示されている構成に対して、測定テーブル1及び基準尺20,30の動きを実現する役割を果たす駆動手段が測長器2,3に組み込まれているのではなく、測定テーブル1に組み込まれている点が異なっており、図3aでは、特に、第一の方向xに沿った動きを実現する役割を果たす駆動手段を見ることができる。
【0046】
この場合にも、駆動手段自体は、図1〜2cに図示されている構成の場合と同様に、各空間方向に対してラック17と、回転しない形で軸18と軸支された、ラック17と係合する歯車19とを有する。
【0047】
上記で図1〜2cに関して、各図面に図示されているラック駆動部がそれぞれラック駆動部と全く異なる構造を持つことも可能なリニア駆動部を代表していると述べたことは、図3a〜4bに関しても言えることである。
【0048】
図3aの実施例の図面では、第一の空間方向xに沿った動き(スライド)を実現することができるように、一方におけるラック17と他方における歯車19とが、測定テーブル1の十字交差式ガイド11,16の第一の空間方向xに沿って互いにスライド可能な二つの部材上に配置されている。具体的には、そうすることによって、第一の空間方向xに沿ってスライド可能であるとともに、測定板10を直接支えるテーブル構成要素11を各空間方向xに沿って動かすことができる。
【0049】
第一のテーブル構成要素11を支える第二のテーブル構成要素16を第二の空間方向yに沿ってスライドさせることができるように、同じ手法で構成された(図3aでは見ることができない)駆動手段が配備されている。
【0050】
そこでは、図1〜2cの構成と異なり、長手方向にスライドするガイド部材(例えば、符号21)とそれに対応する測長器2,3の各基準尺(例えば、符号20)は、それぞれ測定板10が当該の空間方向x又はyに沿って(測定テーブルに作用する駆動手段によって駆動される形で)動いた場合に、受動的に一緒に動かされることとなる。
【0051】
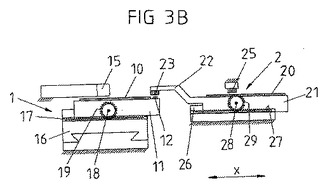
図3bは、図2bと3aの構成の改善形態を図示しており、そこでは測定テーブル1と測長器(例えば、符号2)の両方とも、それぞれ第一又は第二の空間方向x,yに沿って動かすための駆動手段が組み込まれている。この場合、測定すべき物体(測定板10)と一緒に移動可能な測長器2,3の構成要素(例えば、第一の空間方向xに対応する基準尺20)は、測定テーブル1と連結されていない。それに代わって、一方における測定テーブル側の駆動手段と、他方における測長器側の駆動手段とは同期しており、二つの空間方向x,yに沿って、それぞれ一方における測定テーブル1と他方における測長器2,3の等しい(同期した)動きが行われるようになっている。この場合でも、又もや場合によっては起こり得る等しい動きからの偏差は、測長器側の測定ヘッド23,33とそれに対応する測定テーブル側の測定目盛12,13によって、当該の空間方向(測定方向)x又はyに沿った測長器2,3と測定テーブル1の間の距離の変化を検出して、それを補償する形で補正することが可能である。
【0052】
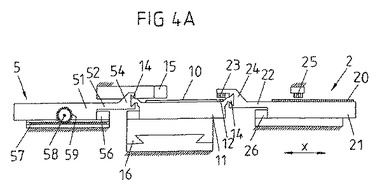
図4aは、図3aの実施例の変化形態を図示しており、その違いは、駆動手段が測定テーブル1に直に組み込まれているのではなく、二つの空間方向x,yの各々に対して、それぞれ位置を固定された静止したガイド部材56とその上を当該の空間方向x又はyに沿って案内される長手方向に動くガイド部材51とを有する駆動スライダー5が測定テーブル1に組み込まれていることであり、一方の静止したガイド部材56には、ラック57が組み込まれており、他方の長手方向に動くガイド部材51には、回転しない形で軸58と軸支された、ラック57と係合する歯車59が組み込まれている。即ち、ラック57が歯車59の軸58を介して駆動モーターによって駆動されることによって、位置を固定された静止したガイド部材56に関する長手方向に動くガイド部材51の長手方向の動きを実現することができる。
【0053】
長手方向に動くガイド部材51は、連結領域52と握りつかみ54を介して、詳しくは、一方の測長器2の握りつかみ24とそれに対応する測定テーブル1の固定領域14とにもとづき前述した手法と同じ手法で測定テーブル1の固定領域14と連結されている。
【0054】
従って、測定テーブル1又は測定板10は、図4aに図示されている二つの空間方向x,yに沿った構成では、それぞれ測定テーブル1と連結された長手方向に動くガイド部材51を備えた駆動スライダー5によって牽引される。更に、測定テーブル1又は測定板10と一緒に移動可能な測長器2,3の構成要素(基準尺20,30)も、図1a〜2cにもとづき前述した手法で測定テーブル1と連結されているので、そのような構成要素は、駆動スライダー5により実現される、それぞれ対応する空間方向x及び/又はyに沿った測定テーブル1又はその上方の板11の動き、従って測定板10の動きによって一緒に動かされることとなる。
【0055】
図4bは、図4aの構成の変化形態を図示しており、測長器2,3には、図4bにおいて、例えば、第一の空間方向xに沿って作用する測長器2にもとづき図示されている通り、それぞれ専用の駆動手段が組み込まれている。それらの駆動手段は、測定テーブル1に作用する当該の駆動スライダー5の駆動手段と同期しており、そのため当該の空間方向x又はyに沿った一方における駆動スライダー5及び測定テーブル1と他方における測長器2,3の動く構成要素20,30とのほぼ同期した動きを実現することができる。そのような場合、測定テーブル1と測定テーブル1と一緒に移動可能な測長器2,3の構成要素(基準尺20,30)との間の連結は不要である。
【0056】
図4aと4bに図示されている構成は、測定テーブル1を動かすために別個の駆動スライダーを使用しているために、図2bに図示されている構成と同様に、測定テーブル1に熱の発生が起こらないという利点を有する。しかし、そのためには、別個の駆動スライダー5、即ち、二つの空間方向x,yの各々に対して一つの駆動スライダー5が必要であり、そのことは、構成全体の所要空間を増大させることとなる。
【0057】
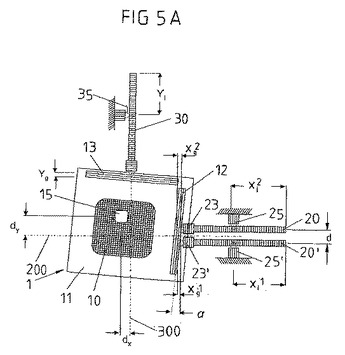
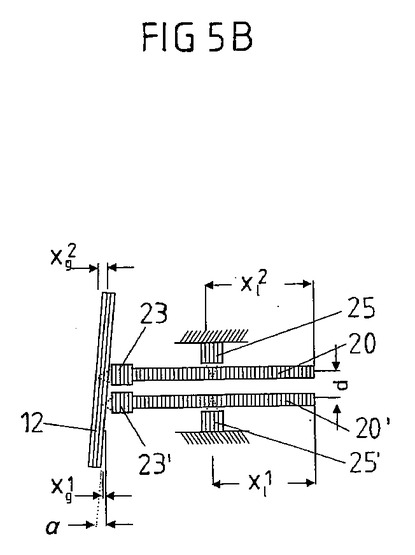
図5a,5b及び6には、図1〜2cの構成の改善形態が図示されており、その違いは、第一の空間方向xに対応する測長器2が、互いに平行に配置された、第二の空間方向yに沿って互いに間隔(間隔d)を開けて共通の長手方向に動くガイド部材21上に案内された基準尺20,20’を有し、それらには、それぞれ当該の基準尺20,20’を走査するための走査ヘッド25,25’と、それに対応する測定テーブル1上を測定板10に隣接して延びる測定目盛12を走査するための走査ヘッド23,23’とが組み込まれていることである。
【0058】
そうすることによって、測定テーブル1又は正確には上方の板11、従って測定板10の角度誤差αを求めて、所謂アッベ形式の構成外における測定結果の評価又は物体の加工時に考慮することができる。即ち、この場合、測定又は加工時において、構造的な負担を増大させる可能性が有る、走査機器又は工具を測定軸200,300の交点(アッベ形式の構成)に正確に配置するということが不要である。むしろ、場合によっては起こり得る角度誤差を計算により補正することができる。
【0059】
図5aと5bに表示されている、第一の空間方向xに対応する二つの基準尺20,20’を走査ヘッド25,25’を用いて走査することによって得られる測定値
【0060】
【数1】
【0061】
と
【0062】
【数2】
【0063】
及び第一の空間方向xに対応する測定目盛12を測定ヘッド23,23’を用いて走査することによって得られる測定値
【0064】
【数3】
【0065】
と
【0066】
【数4】
【0067】
から、十字交差式ガイドの角度誤差αが次の通り得られる。
【0068】
【数5】
【0069】
二つの空間方向x,yに沿った走査機器15又は走査機器15の代わりに使用される加工ユニットと測定軸200,300の交点との空間的な偏差dx ,dy が有る場合、その偏差から、補正した角度によるポジション値が次の通り得られる。
【0070】
【数6】
【0071】
そのようにして得られた測定テーブル1又は上方の板11の角度誤差αに関する情報は、角度誤差を補正して、例えば、感光性にコーティングされてフォトマスクを用いて露光される板などの、上方の板11の上に配置された加工すべき物体又は測定テーブル1自体を正しい位置に置くために使用することができる。当然のことながら、角度誤差に対してフォトマスクを正しい位置に置くために、角度誤差に関する情報を使用することもできる。如何なる場合でも、感光性にコーティングされた板とフォトマスクの間の正しい位置関係を保証することが可能である。
【0072】
即ち、特に、交差格子を備えた測定板を高精度なフォトリソグラフィーにより製造することが可能となる。同様に、当該の測定板の正確さを検査するために、測長器2,3を前述した通り使用することによって、そのような測定テーブル上における、それに続く交差格子の正確さの検査を行うことができる。
【図面の簡単な説明】
【0073】
【図1】測定すべき物体が上に配置された、平面内を(各空間方向には測定テーブルの動きの大きさを検出するための測長器が対応している)互いに直角な二つの空間方向に沿って移動可能な測定テーブルの模式的な平面図
【図2a】図1の構成の詳細な平面図
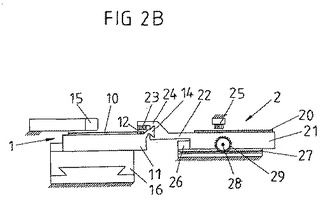
【図2b】図2aの構成の第一の側面図
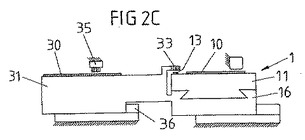
【図2c】図2aの構成の第二の側面図
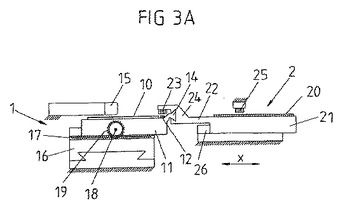
【図3a】測定テーブルを動かすための駆動手段に関する図2a,2b及び2cの構成の第一の変化形態の図
【図3b】測定テーブルを動かすための駆動手段に関する図2a,2b及び2cの構成の第二の変化形態の図
【図4a】測定テーブルを動かすための駆動手段に関する図2a,2b及び2cの構成の第三の変化形態の図
【図4b】測定テーブルを動かすための駆動手段に関する図2a,2b及び2cの構成の第四の変化形態の図
【図5a】測定すべき物体が上に配置された、平面内の(一つの空間方向には、図1と比較して拡大された、測定テーブルの動きの大きさを検出するための測長器が対応している)互いに直角な二つの空間方向に沿って移動可能な測定テーブルの第二の実施構成の模式的な平面図
【図5b】図5aの構成の断面図
【図6】図5aによる構成の詳細な平面図
【技術分野】
【0001】
本発明は、請求項1の上位概念にもとづく少なくとも一つのスライド方向に沿って(即ち、第一の方向に沿って、並びに場合によっては、第二及び/又は第三の方向に沿って)移動可能な物体の位置を計測するための装置に関する。
【背景技術】
【0002】
そのような装置は、測長器の第一の構成要素として、それに対応するスライド方向、即ち、例えば、第一の方向に沿って延びる、少なくとも一つの基準尺と、測長器の第二の構成要素として、それに対応する基準尺を走査するための走査ヘッドとを有し、基準尺は、第一の方向に沿って走査ヘッドに対して相対的に移動し、その結果第一の方向に沿った走査ヘッドに対する基準尺の位置の変化を検出することが可能であり、基準尺と走査ヘッドの中の何れか一方が、測定すべき物体と一緒に第一の方向に沿って動き、更に、測定すべき物体と一緒に移動可能な測長器の構成要素と各物体との間の距離を計測するための機器が配備されている。
【0003】
特許文献1により周知である変位計の形式の冒頭に述べた種類の装置は、シャーシと、センサーと測定すべき物体の表面(鏡面)の間の距離を検出するためのフォーカスセンサーの形式の非接触式センサー(距離センサー)と、連結部材を介してフォーカスセンサーと固く連結された直線的なスケールと、シャーシに固定された、直線的なスケールの目盛区分を読み取るための機器と、フォーカスセンサーと直線的なスケールを動かして、それにより直線的なスケールとフォーカスセンサーを一緒にシャーシに対して相対的に移動させるためのアクチュエータと、アクチュエータを作動させるための制御回路とを備えている。
【0004】
この場合、直線的なスケール(基準尺)とそれに対応する直線的なスケールの目盛区分を読み取るための機器(走査ヘッド)とは、測定すべき物体の動きを検出する役割を果たしており、直線的なスケールは、各物体と一緒に移動することが可能であり、それに対応する直線的なスケールの目盛区分を読み取るための機器は、位置を固定した形で変位計のシャーシと連結されている。直線的なスケールに配備された、直線的なスケールと測定すべき物体の表面の間の距離を計測するための機器としてのフォーカスセンサーの形式の非接触式センサーを用いて、直線的なスケールと測定すべき物体の間の距離を求めることができる。そうすることによって、直線的なスケールに対応するフォーカスセンサーによって、直線的なスケールと測定すべき物体の間に存在する距離を検出することができるので、測定すべき物体が動いた場合の直線的なスケールのトラッキングに対して、特に高い要件を課する必要がなくなっている。
【0005】
測定すべき物体又は観察している物体の表面の動きは、直線的なスケールとそれに対応する直線的なスケールの目盛区分を読み取るための機器との相対的な動きにもとづき検出され、その場合直線的なスケールのトラッキング誤差は、直線的なスケールと測定すべき物体又はその観察している表面の間の距離に関するフォーカスセンサーの測定結果にもとづき補正(補償)することが可能である。
【0006】
この周知の変位計では、周囲の空気に関するパラメータの変動(空気パラメータの変化)のために、特に、屈折率の変動のために、非接触式センサーの測定結果が不確実となり、そのため高精度な測定に関して十分に正確でないという欠点を有する。
【特許文献1】ドイツ特許第4219311号明細書
【特許文献2】欧州特許公開第0793870号明細書
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明の課題は、冒頭に述べた種類の少なくとも一つのスライド方向に沿って移動可能な物体の位置を計測するための装置を更に改善することである。
【課題を解決するための手段】
【0008】
この課題は、本発明にもとづき、請求項1の特徴を有する装置を実現することによって解決される。
【0009】
それによると、冒頭に述べた種類の装置において、一方における測定すべき物体と一緒に移動可能な測長器の構成要素と他方における測定すべき物体自体の間の距離を計測するための装置が、第一の構造グループとしての測定目盛と、それに対応する第二の構造グループとしての測定ヘッドとを備えており、二つの構造グループの中の一方が、測定すべき物体に配備されており(即ち、それと一緒に移動する形で連結されており)、二つの構造グループの中の他方が、測定すべき物体と一緒に移動可能な測長器の構成要素に配備されている(即ち、それと一緒に移動する形で連結されている)ものと規定される。
【0010】
本発明による解決策は、測定すべき物体と測定すべき物体と一緒に移動可能な(スライド可能な)測長器の構成要素の間の距離を計測するために、更に別の測長器を使用し、その測長器が、それに対応する測定ヘッドを用いて測定目盛を走査するとの原理にもとづくという利点を有する。そうすることによって、測定結果が、周囲の空気に関するパラメータに依存しなくなる。
【0011】
この場合、本発明による一つ以上のスライド方向に沿って移動可能な物体の位置を計測するための装置は、狭い意味での測定、例えば、物体上に設けられた交差格子の校正のために配備されるだけでなく、(検出したポジション値を制御のために使用する制御機器との協力した動作によって)測定すべき物体を加工する場合に、その物体の位置を定めるために使用することも可能であり、例えば、感光性にコーティングされた板の構造を露光(フォトリソグラフィー)するか、或いはレーザー又はフライスで切削するために使用することも可能である。
【0012】
本発明の有利な改善構成では、本発明による装置は、二つの直線的な独立した(特に互いに直角の)スライド方向に沿って移動可能な物体、例えば、測定テーブル上に固定された物体の位置を計測する役割を果たす。その場合、二つの方向の何れも、その方向に対応して、当該のスライド方向に沿って延びる第一の構成要素としての基準尺と、その基準尺を走査するために配備された第二の構成要素としての走査ヘッドとを備えた一つの測長器が配備されており、そのため二つのスライド方向の何れに対しても、それぞれ対応する基準尺に関する走査ヘッドの位置の変化を検出することが可能であり、二つの測長器の何れにおいても、基準尺と走査ヘッドの中の何れか一方が測定すべき物体と一緒に当該のスライド方向に沿って動く。更に、二つの測長器の何れにも、当該のスライド方向に沿った測定すべき物体と一緒に移動可能な当該の測長器の構成要素と測定すべき物体の距離を計測するための機器が組み込まれている。この場合、それぞれ当該のスライド方向に沿った測定すべき物体と一緒に移動可能な当該の測長器の構成要素と測定すべき物体自体の間の距離を計測するための二つの機器は、それぞれ第一の構造グループとしての測定目盛と、それに対応する第二の構造グループとしての測定ヘッドとを有し、それぞれ二つの構造グループの中の一方が測定すべき物体に配備されており、二つの構造グループの中の他方が当該のスライド方向に沿って測定すべき物体と一緒に移動可能な測長器の構成要素と連結されている。
【0013】
そのような装置を用いて、平面内における測定すべき物体の任意の動きを検出することができ、その動きは、正にそれぞれ二つの測長器の中の一方によって検知される、二つの直線的な独立したスライド方向に沿った動きを重ね合わた(組み合わせた)動きとしてそれぞれ表すことが可能である。
【0014】
本発明の前述した改善構成の有利な実施形態では、特に、測長器の走査ヘッドである、測定すべき物体と一緒に移動することができない測長器の二つの構成要素は、互いに固く連結されている。
【0015】
そのため、有利には、測長器の基準尺は、測定すべき物体と一緒に移動可能な測長器の構成要素としての役割を果たす。そこには、又もや有利には、測定すべき物体上に配備された測定目盛を走査する役割を果たす測定ヘッドが、詳しくは、特に、一緒に動くように固く連結された形で配置されている。
【0016】
少なくとも一つの(有利には、測定すべき物体と一緒に移動可能な)基準尺と少なくとも一つの(有利には、測定すべき物体上に配備された)測定目盛の両方とも、有利には、それぞれ周期的な目盛区分の形の増分トラック(増分目盛)を有する。
【0017】
測定すべき物体は、例えば、所謂測定テーブル上に固定された測定板とすることができ、その測定板に対応して、平面内を移動することが可能であり、測定板上に配備された測定尺を走査し、それによって当該の平面内における測定板の動きを検出することができる走査機器が配備されている。この場合、本発明による少なくとも一つのスライド方向に沿って、特に、一つの平面内に延びる二つのスライド方向に沿って移動可能な物体、ここでは測定板の位置を計測するための装置は、測定板とそれに対応する走査機器とから成る位置測定装置を検査する役割と、場合によっては、それを校正する役割とを果たす。
【0018】
そのために、測定すべき物体、即ち、測定板と一緒に移動することができない当該の測長器の構成要素、即ち、特に、二つの測長器の測定ヘッドは、測定板を走査する役割を果たす走査機器と固く連結されている。
【0019】
測定すべき物体を少なくとも一つのスライド方向(第一の方向及び/又は第二の方向)に沿って動かすことができるように、一方の側の測定すべき物体自体には、所定の各スライド方向に対して、当該の移送方向に沿った測定すべき物体の所望の動きを実現することができる駆動部が配備されており、その場合当該の測長器の動く構成要素が受動的に一緒に牽引されるようにするか、或いは当該の測長器に独自の駆動部を組み込むことが可能であり、そこでは一方における測定すべき物体に組み込まれた駆動部と他方における当該の測長器に組み込まれた駆動部とは同期しており、測定すべき物体が動いた場合に、測長器の移動可能な構成要素がそれぞれほぼ同じ道程だけ一緒に動かされるようになっている。この場合、測定すべき物体と一緒に移動可能な当該の測長器の構成要素とその物体自体の間の距離を計測するために組み込まれた機器によって、場合によっては起こる得る偏差を検出して、その偏差を補償することができる。
【0020】
本発明の別の実施構成では、測定すべき物体と一緒に移動可能な当該の測長器の構成要素は、駆動部によって動かされるとともに、測定すべき物体を牽引する。この実施構成は、測定すべき物体自体において熱の発生が起こらないという利点を有する。
【0021】
それに代わって、各スライド方向に対して、測定すべき物体から離れているが、それと連結された別個の駆動スライダーを測定すべき物体に配備することができ、その駆動スライダーは、当該のスライド方向に沿った動きに対して、測定すべき物体を一緒に移動させるものである。
【発明を実施するための最良の形態】
【0022】
本発明の更なる詳細及び利点は、以下の図面にもとづく実施例の説明によって明らかとなる。
【0023】
図1と図2a〜2cには、十字交差式ガイド11,16を用いて平面(x,y平面)内を互いに直角な二つの空間方向(スライド方向)x又はyに沿って移動可能な(スライド可能な)、測定テーブル上に固定された、測定すべき物体としての測定板10を備えた測定テーブル1が図示されており、この実施例において、その測定板の十字交差式ガイド11,16と逆の表面上には、走査機器15によって走査可能な、例えば、十字目盛の形式の測定尺が配備されている。走査機器15は、位置を固定して配置されている、即ち、測定テーブル1の測定板10と一緒に動かず、そのため走査機器15を用いて測定板10上に配備された測定尺を走査することによって、二つの空間方向x,yの各々に沿った測定板10の動きの大きさを検出することが可能である。
【0024】
十字交差式ガイド11,16は、第二の空間方向yに沿って移動可能なテーブル構成要素(下方の板16)と、その上の第一の空間方向xに沿って移動可能なテーブル構成要素(上方の板11)とを有し、後者は、結局二つの空間方向x,yに沿って移動することが可能であり、測定板10を支えている。
【0025】
ここで、更に、二つの空間方向x,yの各々に沿った測定板10の動きの大きさを計測するために、二つの測長器2,3が配備されている。これらは、一方において、二つの空間方向x,yに沿った測定板10の動きの大きさを走査機器15と独立して、並びにそれに追加して検出し、それによって走査機器15とそれに対応する測定板10の測定尺を用いて行われる測定の正確さを検査する役割を果たすことができる。しかし、それに代わって、二つの測長器2,3は、二つの空間方向x,yに沿った測定板10の動きを単独で計測するために配備することもできる。その場合二つの測長器2,3は、それぞれ二つの空間方向x,yの中の一つに対応しており、対応する各空間方向x又はy(当該の測長器の測定方向)に沿った測定板10の動きを検出する役割を果たしている。
【0026】
二つの測長器2,3の各々は、それぞれ位置を固定されたガイド部材26又は36と、その上を当該の空間方向x又はyに沿って移動する長手方向に動くガイド部材21,31とから構成される長手方向ガイド21,26又は31,36を有する。当該の測長器2又は3の動くガイド部材21,31は、それぞれ対応する空間方向(測定方向)x又はyに沿って延びる基準尺20又は30を支えており、当該の基準尺20又は30には、当該の空間方向x又はyに沿って周期的に順番に配置された多くの目盛区分から成る(それぞれ少なくとも一つの基準マークを備えた)周期的な(増分)測定目盛が設けられている。そのため、当該の測長器2,3の測定方向x又はyは、当該の測長器2,3の動くガイド部材21又は31の移動方向と一致する、当該の測長器2,3の基準尺20又は30が延びる方向によって決まる。
【0027】
それに代わって、基準尺20,30には、それぞれ動作開始後直ちに有効な位置を供給し、そのため基準マークに対する照合動作を必要としない絶対符号を設けることもできる。
【0028】
走査機器15又は正確にはその測定板10を走査するために配備されたヘッドは、有利には、二つの基準尺20,30の長手軸200,300の交点、即ち、二つの基準尺20,30が測定テーブル1、特に、測定板10の上を直線的に延長された線の交点に配置される。そのような走査機器15に関する基準尺20,30の構成は、十字交差式ガイド11,16の角度誤差に関係無く測定する役割と、場合によっては、位置を定めることができる役割を果たしており、それは、アッベ形式の構成に対応するものである。
【0029】
二つの測長器2,3の基準尺20,30の走査は、それぞれに対応する位置を固定された、即ち、測定テーブル1と一緒に移動することができない走査ヘッド25又は35を用いて行われ、それによって、当該の測定方向x又はyに沿った、測長器2,3の当該の長手方向に動くガイド部材21,31が測定テーブル1と一緒に動く大きさを求めることが可能となる。
【0030】
二つの長手方向に動くガイド部材21,31の中の一方は、連結部材22又は連結部材22に配備された握りつかみ24を介して、握りつかみ24が測定テーブル1の対応する固定領域14を把持する形で測定テーブル1と連結されている、正確にはその上方の板11と連結されている、従って(測定テーブル1又はその上方の板11)を介して測定板10と連結されている。
【0031】
この場合、測長器2の握りつかみ24とそれに対応する測定テーブル1の固定領域14は、測定テーブル1が当該の測長器2の測定方向xに沿って動いた際に、動くガイド部材21とそれに対応する測長器の動く構成要素としての測長器2の基準尺20とが、測定板10と一緒に測定方向としての第一の空間方向xに沿って動くように構成されている。しかし、それとは逆に、当該の測長器2の動くガイド部材21は、測定板10が当該の測長器2の測定方向xに対して直角に延びる別の空間方向yに沿って動いた際には、一緒に動かない。
【0032】
そのため、第一の空間方向xに対応する測長器2と測定テーブル1との握りつかみ24を介した連結は、測定板10が当該の第一の空間方向xに沿って動いた場合にのみ、動くガイド部材21が一緒に動くようにするが、測定板10が別の第二の空間方向yに沿って動いた場合には一緒に動かないようにすることが必要であり、その理由は、第一の測長器2と測定テーブル1との連結が、二つの空間方向x,yに沿って動く測定テーブルの上方の板11を介して行われるとともに、その板が更に第二の空間方向yに沿って動く下方の板16の上において第一の空間方向xに沿って動くように支持されているためである。
【0033】
それに対して、第二の空間方向yに沿った測定板10の動きを求めるための第二の空間方向yに対応する測長器3の連結は、長手方向に動くガイド部材31の連結部材32を第二の空間方向yに沿ってのみ移動可能なテーブル構成要素、即ち、下方の板16と直接(固く)連結することによって行われる。その場合、連結部材32を介してガイド部材31を固定するためのテーブル構成要素16は、何れにせよ測定方向として第二の測長器3に対応する空間方向yに沿ってのみ動くことができるので、当該のテーブル構成要素16の別の方向xに沿った上記の動くガイド部材31に対する相対的な動きを可能とする、握りつかみを介した連結を設けることは不要である。
【0034】
即ち、二つの測長器2,3は、(一方において握りつかみ24とそれに対応する測定テーブル1又は上方の板11の固定領域14とを介して、他方において測定テーブルの下方の板16との直接的な連結箇所を介して)測定テーブル1の測定板10と(間接的に)連結されており、測定板10が当該の測長器2,3の測定方向x又はyに対応する方向に沿って動いた場合に、長手方向に動くガイド部材21又は31とそれに対応する測長器2,3の基準尺20又は30とが測定板10と一緒に動かされるようになっている。それに対して、測定テーブル1の上方の板11と固定されている測定板10が、当該の測長器2,3の測定方向x又はyに対して直角に延びる空間方向y又はxに沿って動いた場合、当該の測長器2,3の動くガイド部材21又は31は、測定テーブル1とは一緒に動かない。そのために、測定テーブル1の固定領域14は、当該の測長器2に対応する握りつかみ24と長手方向に動く形で係合する長手方向のガイドとして構成されており、そのため測長器2に対応する測定テーブル1の固定領域14が延びる方向は、それに対応する測長器2の測定方向xに対して直角に延びている。
【0035】
即ち、結局は、当該の測長器2,3の測定方向x又はyに対して垂直な方向に沿った、二つの測長器2,3の各々に関する前記の測定テーブル1の相対的な動きが可能となり、測長器2,3は、当該の測長器2,3の測定方向x又はyに関する測定板10の横方向の動きから切り離されることとなる。
【0036】
それに代わって、第一の測長器2に関して図2a〜2cに図示されているのと同様の手法により、第二の測長器3を上方の板11と連結することによって、二つの長手方向に動くガイド部材21,31も、それぞれ握りつかみを介して二つの空間方向x,yに沿って動く測定テーブル1の上方の板11と連結することもできる。
【0037】
図1,2a,2b及び2cに図示されている実施例では、測定テーブル1は、二つの空間方向x,yに沿った動きのために直接駆動されず、むしろ当該の測長器2,3の長手方向に動くガイド部材21又は31をそれと対応する位置を固定されたガイド部材26,36に関して動かすことが可能な駆動手段が二つの測長器2,3の各々に組み込まれている。当該の駆動手段は、当該の測長器2,3の位置を固定されたガイド部材26又は36上に配置された、或いは形成された、当該の測定方向x又はyに沿って延びるラック27,37を備えており、そのラックには、当該の長手方向に動くガイド部材21又は31上の回転可能な軸28又は38と軸支された歯車29又は39が係合している。当該の駆動軸28又は38をそれに対応する(図面には一緒に図示されていない)駆動モーターによって回転させることによって、当該の長手方向に動くガイド部材21又は31と回転可能な形で軸支された歯車29又は39の回転運動が実現されており、そのため歯車の外歯は、それに対応する位置を固定されたガイド部材26,36のラック27又は37上を転がることとなる。そうすることによって、当該の歯車29又は39の回転方向に応じて、位置を固定されたガイド部材26,36に関する当該の測長器2,3の長手方向に動くガイド部材21,31のそれぞれ対応する空間方向又は測定方向x,yに沿った相対的な動きが実現され、そのため測定テーブル1を介して測長器2,3の長手方向に動くガイド部材21,31と連結された測定板10が一緒に動かされることとなる。それに代わって、相対的な動きを実現するために、測長器2,3に、それぞれリニアモーターを組み込むこともできる。
【0038】
この場合、前述したラック駆動部は、それに対応する位置を固定されたガイド部材26又は36に関する当該の長手方向に動くガイド部材21又は31の直線的な動きを実現することが可能である通常の直線的な駆動部を代表する役割を果たすだけである。従って、当該の長手方向に動くガイド部材21,31の長手方向の動きを実現するためのラック駆動部として、それ以外の直線的な駆動部を使用することもできるが、そのような駆動部は、通常簡単に図面に図示することができない。使用可能な有利な直線的な駆動部に関しては、例えば、特許文献2を参照されたい。
【0039】
この場合、図1〜2cに図示されている構成は、二つの空間方向x,yに沿った測定テーブル1と二つの基準尺20,30の動きを実現するための駆動手段が測定テーブル1自体の測長器2,3に組み込まれているために、熱の発生が起こらないという利点を有する。
【0040】
測定テーブル1の上には、正確には、その測定板10を支える上方の板11の上には、測定板10と隣接して、二つの測長器2,3の各々に対応する二つの増分測定目盛12,13が延びている。これらの増分測定目盛12,13は、それぞれに対応する測長器2又は3の測定方向x又はyに沿って順番に配置された多くの目盛区分から構成されており、それらの目盛区分は、当該の連結部材22,32を介して当該の測長器2,3の長手方向に動くガイド部材21,31と固く連結された測定ヘッド23又は33によって走査することが可能である。測長器2,3の基準尺20,30と一緒に移動可能な測定ヘッド23,33を用いて、測定テーブル1上に測定板10と隣接して配備された測定目盛12,13を走査することによって、当該の測定方向x又はyに沿った基準尺20,30と測定テーブル1(又はその上方の板11、従って、測定板10)の距離の変化を検出することができ、その変化は、例えば、遊びを含めて、握りつかみ24とそれに対応する固定領域14との協働作用によって追従することができる。そうすることによって、測長器2,3の当該の基準尺20,30と測定テーブル1の間の距離に関する変動を補償することができる。言い換えると、一方及び/又は他方の空間方向x,yに沿った測定板10の動きの大きさを測定することは、当該の基準尺20又は30をそれに対応する走査ヘッド25,35を用いて走査することによって得られた当該の測長器2又は3の測定結果と、測定板と隣接して配備された測定目盛12,13を当該の測定ヘッド23,33を用いて走査することによって検出される、場合によっては、その一方又は他方の方向x,yに沿った測定板10の動きと並行して生じる、当該の基準尺20,30と測定板10の間の距離の変化とから構成される。この場合、測定板10と隣接して配備された測定目盛12,13は、所謂ストレートバーとして、直線からの偏差と十字交差式ガイド11,16の場合によっては起こる緩みが測定結果に対して影響することを防止する役割も果たしている。
【0041】
当該の空間方向x,yに関するポジション値は、それぞれ当該の測長器2,3の測定結果xl 又はyl と当該の測長器2,3の基準尺20,30と測定テーブル1又は正確には測定板10の間の距離の変化を検出するための手段12,23;13,33の測定結果xg 又はyg との合計xl +xg 又はyl +yg として得られる。
【0042】
測定板10上に配備された、対応する走査機器15を用いて走査される(例えば、交差格子目盛の形式の)測定尺の正確さを検査するために測長器2,3を使用する場合、測定板10の測定尺に対応する走査機器15は、有利には、二つの測長器2,3の走査ヘッド25,35と固く連結されている。更に、走査機器15は、有利には、二つの測長器2,3の測定軸の交点と一致する測定板10の上方の位置に有る。
【0043】
しかし、図1〜2cに図示されている位置測定構成は、測定板10を校正するための測定構成としての役割だけでなく、テーブル1を用いて、例えば、照明ユニット、レーザー機器、フライスなどの加工ユニットを位置決めするとともに、そのような加工ユニットを用いて加工すべき物体に対して高い精度で位置決めするための構成としての役割も果たすことができる。
【0044】
図3a,3b,4a及び4bには、図1〜2cの構成と異なる変化形態、詳しくは、一方における測定テーブル1又は測定板10と他方における基準尺20,30の共通した動きを生じさせる駆動手段に関して異なる変化形態が図示されている。以下において、それぞれ図2bの側面図を出発点とする図3a〜4bにもとづき、例えば、第一の空間方向x(スライド方向)に沿った測定テーブル1又はその上方の板11、従って、測定板10の位置を計測することが可能な測長器2にもとづき、そのような変化形態を説明する。しかし、以下における考察は、それぞれ第二の空間方向yに沿った測定テーブル1の上方の板11又は測定板10の位置を計測するために配備された第二の測長器3に対しても同様に有効である。
【0045】
図3aに図示されている構成は、図1〜2cに図示されている構成に対して、測定テーブル1及び基準尺20,30の動きを実現する役割を果たす駆動手段が測長器2,3に組み込まれているのではなく、測定テーブル1に組み込まれている点が異なっており、図3aでは、特に、第一の方向xに沿った動きを実現する役割を果たす駆動手段を見ることができる。
【0046】
この場合にも、駆動手段自体は、図1〜2cに図示されている構成の場合と同様に、各空間方向に対してラック17と、回転しない形で軸18と軸支された、ラック17と係合する歯車19とを有する。
【0047】
上記で図1〜2cに関して、各図面に図示されているラック駆動部がそれぞれラック駆動部と全く異なる構造を持つことも可能なリニア駆動部を代表していると述べたことは、図3a〜4bに関しても言えることである。
【0048】
図3aの実施例の図面では、第一の空間方向xに沿った動き(スライド)を実現することができるように、一方におけるラック17と他方における歯車19とが、測定テーブル1の十字交差式ガイド11,16の第一の空間方向xに沿って互いにスライド可能な二つの部材上に配置されている。具体的には、そうすることによって、第一の空間方向xに沿ってスライド可能であるとともに、測定板10を直接支えるテーブル構成要素11を各空間方向xに沿って動かすことができる。
【0049】
第一のテーブル構成要素11を支える第二のテーブル構成要素16を第二の空間方向yに沿ってスライドさせることができるように、同じ手法で構成された(図3aでは見ることができない)駆動手段が配備されている。
【0050】
そこでは、図1〜2cの構成と異なり、長手方向にスライドするガイド部材(例えば、符号21)とそれに対応する測長器2,3の各基準尺(例えば、符号20)は、それぞれ測定板10が当該の空間方向x又はyに沿って(測定テーブルに作用する駆動手段によって駆動される形で)動いた場合に、受動的に一緒に動かされることとなる。
【0051】
図3bは、図2bと3aの構成の改善形態を図示しており、そこでは測定テーブル1と測長器(例えば、符号2)の両方とも、それぞれ第一又は第二の空間方向x,yに沿って動かすための駆動手段が組み込まれている。この場合、測定すべき物体(測定板10)と一緒に移動可能な測長器2,3の構成要素(例えば、第一の空間方向xに対応する基準尺20)は、測定テーブル1と連結されていない。それに代わって、一方における測定テーブル側の駆動手段と、他方における測長器側の駆動手段とは同期しており、二つの空間方向x,yに沿って、それぞれ一方における測定テーブル1と他方における測長器2,3の等しい(同期した)動きが行われるようになっている。この場合でも、又もや場合によっては起こり得る等しい動きからの偏差は、測長器側の測定ヘッド23,33とそれに対応する測定テーブル側の測定目盛12,13によって、当該の空間方向(測定方向)x又はyに沿った測長器2,3と測定テーブル1の間の距離の変化を検出して、それを補償する形で補正することが可能である。
【0052】
図4aは、図3aの実施例の変化形態を図示しており、その違いは、駆動手段が測定テーブル1に直に組み込まれているのではなく、二つの空間方向x,yの各々に対して、それぞれ位置を固定された静止したガイド部材56とその上を当該の空間方向x又はyに沿って案内される長手方向に動くガイド部材51とを有する駆動スライダー5が測定テーブル1に組み込まれていることであり、一方の静止したガイド部材56には、ラック57が組み込まれており、他方の長手方向に動くガイド部材51には、回転しない形で軸58と軸支された、ラック57と係合する歯車59が組み込まれている。即ち、ラック57が歯車59の軸58を介して駆動モーターによって駆動されることによって、位置を固定された静止したガイド部材56に関する長手方向に動くガイド部材51の長手方向の動きを実現することができる。
【0053】
長手方向に動くガイド部材51は、連結領域52と握りつかみ54を介して、詳しくは、一方の測長器2の握りつかみ24とそれに対応する測定テーブル1の固定領域14とにもとづき前述した手法と同じ手法で測定テーブル1の固定領域14と連結されている。
【0054】
従って、測定テーブル1又は測定板10は、図4aに図示されている二つの空間方向x,yに沿った構成では、それぞれ測定テーブル1と連結された長手方向に動くガイド部材51を備えた駆動スライダー5によって牽引される。更に、測定テーブル1又は測定板10と一緒に移動可能な測長器2,3の構成要素(基準尺20,30)も、図1a〜2cにもとづき前述した手法で測定テーブル1と連結されているので、そのような構成要素は、駆動スライダー5により実現される、それぞれ対応する空間方向x及び/又はyに沿った測定テーブル1又はその上方の板11の動き、従って測定板10の動きによって一緒に動かされることとなる。
【0055】
図4bは、図4aの構成の変化形態を図示しており、測長器2,3には、図4bにおいて、例えば、第一の空間方向xに沿って作用する測長器2にもとづき図示されている通り、それぞれ専用の駆動手段が組み込まれている。それらの駆動手段は、測定テーブル1に作用する当該の駆動スライダー5の駆動手段と同期しており、そのため当該の空間方向x又はyに沿った一方における駆動スライダー5及び測定テーブル1と他方における測長器2,3の動く構成要素20,30とのほぼ同期した動きを実現することができる。そのような場合、測定テーブル1と測定テーブル1と一緒に移動可能な測長器2,3の構成要素(基準尺20,30)との間の連結は不要である。
【0056】
図4aと4bに図示されている構成は、測定テーブル1を動かすために別個の駆動スライダーを使用しているために、図2bに図示されている構成と同様に、測定テーブル1に熱の発生が起こらないという利点を有する。しかし、そのためには、別個の駆動スライダー5、即ち、二つの空間方向x,yの各々に対して一つの駆動スライダー5が必要であり、そのことは、構成全体の所要空間を増大させることとなる。
【0057】
図5a,5b及び6には、図1〜2cの構成の改善形態が図示されており、その違いは、第一の空間方向xに対応する測長器2が、互いに平行に配置された、第二の空間方向yに沿って互いに間隔(間隔d)を開けて共通の長手方向に動くガイド部材21上に案内された基準尺20,20’を有し、それらには、それぞれ当該の基準尺20,20’を走査するための走査ヘッド25,25’と、それに対応する測定テーブル1上を測定板10に隣接して延びる測定目盛12を走査するための走査ヘッド23,23’とが組み込まれていることである。
【0058】
そうすることによって、測定テーブル1又は正確には上方の板11、従って測定板10の角度誤差αを求めて、所謂アッベ形式の構成外における測定結果の評価又は物体の加工時に考慮することができる。即ち、この場合、測定又は加工時において、構造的な負担を増大させる可能性が有る、走査機器又は工具を測定軸200,300の交点(アッベ形式の構成)に正確に配置するということが不要である。むしろ、場合によっては起こり得る角度誤差を計算により補正することができる。
【0059】
図5aと5bに表示されている、第一の空間方向xに対応する二つの基準尺20,20’を走査ヘッド25,25’を用いて走査することによって得られる測定値
【0060】
【数1】
【0061】
と
【0062】
【数2】
【0063】
及び第一の空間方向xに対応する測定目盛12を測定ヘッド23,23’を用いて走査することによって得られる測定値
【0064】
【数3】
【0065】
と
【0066】
【数4】
【0067】
から、十字交差式ガイドの角度誤差αが次の通り得られる。
【0068】
【数5】
【0069】
二つの空間方向x,yに沿った走査機器15又は走査機器15の代わりに使用される加工ユニットと測定軸200,300の交点との空間的な偏差dx ,dy が有る場合、その偏差から、補正した角度によるポジション値が次の通り得られる。
【0070】
【数6】
【0071】
そのようにして得られた測定テーブル1又は上方の板11の角度誤差αに関する情報は、角度誤差を補正して、例えば、感光性にコーティングされてフォトマスクを用いて露光される板などの、上方の板11の上に配置された加工すべき物体又は測定テーブル1自体を正しい位置に置くために使用することができる。当然のことながら、角度誤差に対してフォトマスクを正しい位置に置くために、角度誤差に関する情報を使用することもできる。如何なる場合でも、感光性にコーティングされた板とフォトマスクの間の正しい位置関係を保証することが可能である。
【0072】
即ち、特に、交差格子を備えた測定板を高精度なフォトリソグラフィーにより製造することが可能となる。同様に、当該の測定板の正確さを検査するために、測長器2,3を前述した通り使用することによって、そのような測定テーブル上における、それに続く交差格子の正確さの検査を行うことができる。
【図面の簡単な説明】
【0073】
【図1】測定すべき物体が上に配置された、平面内を(各空間方向には測定テーブルの動きの大きさを検出するための測長器が対応している)互いに直角な二つの空間方向に沿って移動可能な測定テーブルの模式的な平面図
【図2a】図1の構成の詳細な平面図
【図2b】図2aの構成の第一の側面図
【図2c】図2aの構成の第二の側面図
【図3a】測定テーブルを動かすための駆動手段に関する図2a,2b及び2cの構成の第一の変化形態の図
【図3b】測定テーブルを動かすための駆動手段に関する図2a,2b及び2cの構成の第二の変化形態の図
【図4a】測定テーブルを動かすための駆動手段に関する図2a,2b及び2cの構成の第三の変化形態の図
【図4b】測定テーブルを動かすための駆動手段に関する図2a,2b及び2cの構成の第四の変化形態の図
【図5a】測定すべき物体が上に配置された、平面内の(一つの空間方向には、図1と比較して拡大された、測定テーブルの動きの大きさを検出するための測長器が対応している)互いに直角な二つの空間方向に沿って移動可能な測定テーブルの第二の実施構成の模式的な平面図
【図5b】図5aの構成の断面図
【図6】図5aによる構成の詳細な平面図
【特許請求の範囲】
【請求項1】
少なくとも一つのスライド方向に沿って移動可能な物体の位置を計測するための装置であって、各スライド方向には、当該のスライド方向に沿った物体の位置を測定するための測長器が組み込まれており、その測長器は、第一の構成要素として当該のスライド方向(x,y)に沿って延びる基準尺(20,30)を有し、
・当該の測長器(2,3)の第二の構成要素としての基準尺(20,30)を走査するための走査ヘッド(25,35)が配備されており、そのため当該のスライド方向(x,y)に沿った走査ヘッド(25,35)に対する基準尺(20,30)の位置の変化を測定することが可能であり、当該の測長器(2,3)の二つの構成要素(20,25;30,35)の中の一方が、測定すべき物体(10)が動いた場合に、その物体と一緒に当該のスライド方向(x,y)に沿って動かされることとなり、
・測長器(2,3)の基準尺(20,30)が延びる方向(x,y)に沿った当該の測定すべき物体(10)と一緒に移動可能な測長器(2,3)の構成要素(20,30)と測定すべき物体(10)との距離を計測するための機器(12,23;13,33)が配備されている、
装置において、
当該の測定すべき物体(10)と一緒に移動可能な測長器(2,3)の構成要素(20,30)と測定すべき物体(10)との距離を計測するための機器(12,23;13,33)が、第一の構造グループとしての測定目盛(12,13)と、それに対応する第二の構造グループとしての測定ヘッド(23,33)とを備えており、二つの構造グループ(12,23;13,33)の中の一方が、測定すべき物体(10)に配備されており、二つの構造グループ(12,23;13,33)の中の他方が、測定すべき物体(10)と一緒に移動可能な測長器(2,3)の構成要素(20,30)に配備されていることを特徴とする装置。
【請求項2】
本装置が、二つの直線的な独立したスライド方向(x,y)に沿って移動可能な物体(10)の位置を計測するように構成、装備されていることと、
測定すべき物体(10)の各スライド方向(x,y)に対応して、当該のスライド方向(x,y)に沿って延びる基準尺(20,30)を備えた一つの測長器(2,3)が配備されていることと、
を特徴とする請求項1に記載の装置。
【請求項3】
測定すべき物体(10)と一緒に移動することができない、二つの測長器(2,3)の構成要素(25,35)が、互いに固く連結されていることを特徴とする請求項2に記載の装置。
【請求項4】
基準尺(20,30)が、測定すべき物体(10)と一緒に移動可能な、当該の測長器(2,3)の構成要素を形成していることを特徴とする請求項1から3までのいずれか一つに記載の装置。
【請求項5】
二つの測長器(2,3)の走査ヘッド(25,35)が、互いに固く連結されていることを特徴とする請求項3又は4に記載の装置。
【請求項6】
当該の測長器(2,3)に対応する、走査測定のための測定目盛(12,13)が、測定すべき物体(10)に配備されていることを特徴とする請求項1から5までのいずれか一つに記載の装置。
【請求項7】
当該の測長器(2,3)に対応する、走査測定のための測定ヘッド(23,33)が、測定すべき物体(10)と一緒に移動可能な測長器(2,3)の構成要素(20,30)と連結されていることを特徴とする請求項1から6までのいずれか一つに記載の装置。
【請求項8】
当該の測長器(2,3)に対応する、走査測定のための走査ヘッド(23,33)が、測長器(2,3)の基準尺(20,30)と連結されていることを特徴とする請求項4又は7に記載の装置。
【請求項9】
当該の測長器(2,3)に対応する、走査測定のための測定目盛(12,13)が、それに対応する測長器(2,3)の測定方向(x,y)と一致する方向を指し示していることを特徴とする請求項1から8までのいずれか一つに記載の装置。
【請求項10】
当該の測長器(2,3)の基準尺(20,30)が増分トラックを有することを特徴とする請求項1から9までのいずれか一つに記載の装置。
【請求項11】
各測長器(2,3)に対応する、走査測定のための測定目盛(12,13)が、増分目盛として構成されていることを特徴とする請求項1から10までのいずれか一つに記載の装置。
【請求項1】
少なくとも一つのスライド方向に沿って移動可能な物体の位置を計測するための装置であって、各スライド方向には、当該のスライド方向に沿った物体の位置を測定するための測長器が組み込まれており、その測長器は、第一の構成要素として当該のスライド方向(x,y)に沿って延びる基準尺(20,30)を有し、
・当該の測長器(2,3)の第二の構成要素としての基準尺(20,30)を走査するための走査ヘッド(25,35)が配備されており、そのため当該のスライド方向(x,y)に沿った走査ヘッド(25,35)に対する基準尺(20,30)の位置の変化を測定することが可能であり、当該の測長器(2,3)の二つの構成要素(20,25;30,35)の中の一方が、測定すべき物体(10)が動いた場合に、その物体と一緒に当該のスライド方向(x,y)に沿って動かされることとなり、
・測長器(2,3)の基準尺(20,30)が延びる方向(x,y)に沿った当該の測定すべき物体(10)と一緒に移動可能な測長器(2,3)の構成要素(20,30)と測定すべき物体(10)との距離を計測するための機器(12,23;13,33)が配備されている、
装置において、
当該の測定すべき物体(10)と一緒に移動可能な測長器(2,3)の構成要素(20,30)と測定すべき物体(10)との距離を計測するための機器(12,23;13,33)が、第一の構造グループとしての測定目盛(12,13)と、それに対応する第二の構造グループとしての測定ヘッド(23,33)とを備えており、二つの構造グループ(12,23;13,33)の中の一方が、測定すべき物体(10)に配備されており、二つの構造グループ(12,23;13,33)の中の他方が、測定すべき物体(10)と一緒に移動可能な測長器(2,3)の構成要素(20,30)に配備されていることを特徴とする装置。
【請求項2】
本装置が、二つの直線的な独立したスライド方向(x,y)に沿って移動可能な物体(10)の位置を計測するように構成、装備されていることと、
測定すべき物体(10)の各スライド方向(x,y)に対応して、当該のスライド方向(x,y)に沿って延びる基準尺(20,30)を備えた一つの測長器(2,3)が配備されていることと、
を特徴とする請求項1に記載の装置。
【請求項3】
測定すべき物体(10)と一緒に移動することができない、二つの測長器(2,3)の構成要素(25,35)が、互いに固く連結されていることを特徴とする請求項2に記載の装置。
【請求項4】
基準尺(20,30)が、測定すべき物体(10)と一緒に移動可能な、当該の測長器(2,3)の構成要素を形成していることを特徴とする請求項1から3までのいずれか一つに記載の装置。
【請求項5】
二つの測長器(2,3)の走査ヘッド(25,35)が、互いに固く連結されていることを特徴とする請求項3又は4に記載の装置。
【請求項6】
当該の測長器(2,3)に対応する、走査測定のための測定目盛(12,13)が、測定すべき物体(10)に配備されていることを特徴とする請求項1から5までのいずれか一つに記載の装置。
【請求項7】
当該の測長器(2,3)に対応する、走査測定のための測定ヘッド(23,33)が、測定すべき物体(10)と一緒に移動可能な測長器(2,3)の構成要素(20,30)と連結されていることを特徴とする請求項1から6までのいずれか一つに記載の装置。
【請求項8】
当該の測長器(2,3)に対応する、走査測定のための走査ヘッド(23,33)が、測長器(2,3)の基準尺(20,30)と連結されていることを特徴とする請求項4又は7に記載の装置。
【請求項9】
当該の測長器(2,3)に対応する、走査測定のための測定目盛(12,13)が、それに対応する測長器(2,3)の測定方向(x,y)と一致する方向を指し示していることを特徴とする請求項1から8までのいずれか一つに記載の装置。
【請求項10】
当該の測長器(2,3)の基準尺(20,30)が増分トラックを有することを特徴とする請求項1から9までのいずれか一つに記載の装置。
【請求項11】
各測長器(2,3)に対応する、走査測定のための測定目盛(12,13)が、増分目盛として構成されていることを特徴とする請求項1から10までのいずれか一つに記載の装置。
【図1】


【図2A】
【図2B】
【図2C】
【図3A】
【図3B】
【図4A】
【図4B】

【図5A】
【図5B】
【図6】

【図2A】
【図2B】
【図2C】
【図3A】
【図3B】
【図4A】
【図4B】
【図5A】
【図5B】
【図6】
【公表番号】特表2009−537795(P2009−537795A)
【公表日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願番号】特願2009−510294(P2009−510294)
【出願日】平成19年2月7日(2007.2.7)
【国際出願番号】PCT/EP2007/001025
【国際公開番号】WO2007/134653
【国際公開日】平成19年11月29日(2007.11.29)
【出願人】(390014281)ドクトル・ヨハネス・ハイデンハイン・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング (115)
【氏名又は名称原語表記】DR. JOHANNES HEIDENHAIN GESELLSCHAFT MIT BESCHRANKTER HAFTUNG
【Fターム(参考)】
【公表日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願日】平成19年2月7日(2007.2.7)
【国際出願番号】PCT/EP2007/001025
【国際公開番号】WO2007/134653
【国際公開日】平成19年11月29日(2007.11.29)
【出願人】(390014281)ドクトル・ヨハネス・ハイデンハイン・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング (115)
【氏名又は名称原語表記】DR. JOHANNES HEIDENHAIN GESELLSCHAFT MIT BESCHRANKTER HAFTUNG
【Fターム(参考)】
[ Back to top ]