
工事情報報知システム
【課題】工事規制時の工事情報をできるだけ安価且つ正確に運転手に報知して、運転者の心理的ストレスを低減しながら安全で円滑な交通を実現する。
【解決手段】工事情報報知システム100は、片側一車線道路190に設置される。A方向側の車線上には工事箇所191が設けられ、各車線上の停止線191a,191b間が工事規制区間となる。このシステム100は、A方向側設備とB方向側設備とを備え、これらを制御する制御装置10を備える。A方向側設備は、第1箇所において車両1を検知可能な位置に設置される車両検出センサ30と、この第1箇所からB方向に所定間隔をおいた第2箇所において車両1を検知可能な位置に設置される車両検出センサ20とを備える。また、A方向側設備は、車両検出センサ30の近傍箇所に設置された信号機50と、車両検出センサ20の近傍箇所に設置された電子看板40とを備える。
【解決手段】工事情報報知システム100は、片側一車線道路190に設置される。A方向側の車線上には工事箇所191が設けられ、各車線上の停止線191a,191b間が工事規制区間となる。このシステム100は、A方向側設備とB方向側設備とを備え、これらを制御する制御装置10を備える。A方向側設備は、第1箇所において車両1を検知可能な位置に設置される車両検出センサ30と、この第1箇所からB方向に所定間隔をおいた第2箇所において車両1を検知可能な位置に設置される車両検出センサ20とを備える。また、A方向側設備は、車両検出センサ30の近傍箇所に設置された信号機50と、車両検出センサ20の近傍箇所に設置された電子看板40とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、道路上の工事に関連して発生する車両に影響のある工事情報を報知する工事情報報知システムに関する。
【背景技術】
【0002】
道路上において工事などが行われる場合、実際の工事箇所を含む所定の区間を工事規制区間として設け、道路上の車両の走行を規制することが行われる。このような工事規制時において、安全性確保の観点から交互通行などの交通整理業務は概ね人手により行われているのが現状である。また、工事規制時においては、工事の状況によるが通常交通による車両の流れが乱されるため、工事規制区間に繋がる車両の渋滞が発生することがある。
【0003】
渋滞が発生した場合は、渋滞末尾位置での車両同士の追突事故等が発生することがあり、車両の運転手は道路状況に十分に注意しながら運転を行う必要がある。このため、渋滞発生時には運転手の心理的ストレスが高まることが多い。なお、このような渋滞などにより発生する各種不具合を解消しようとするために、運転者に対して渋滞に関する情報などを提供するシステムとして、例えば下記特許文献1〜3に開示されたものが知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−288693号公報
【特許文献2】特許第3277127号公報
【特許文献3】特開2008−234489号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1〜3に開示されたものでは、いずれもシステム構成が複雑となるため、情報を提供するためのコストの低減を図り難いという問題がある。特に工事規制時における交互通行などの交通整理業務は人件費が嵩むため、工事規制時の工事情報をできるだけ安価且つ正確に運転手に提供して、運転者の心理的ストレスを低減しつつ安全で円滑な交互通行などを実現することができるシステムが待望されている。
【0006】
本発明は、上記のような事情に鑑みてなされたもので、工事規制時の工事情報をできるだけ安価且つ正確に運転手に報知して、運転者の心理的ストレスを低減しながら安全で円滑な交通を実現することができる工事情報報知システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するため、本発明に係る工事情報報知システムは、道路上の工事規制区間が開始される第1箇所、及びこの第1箇所から車両の進行方向と逆方向に所定間隔をおいた第2箇所において、前記道路上の車両を検知可能な位置にそれぞれ設置される複数の車両検出手段と、前記工事規制区間に関連して前記道路上を走行する車両に影響のある工事情報を報知可能な報知部を備えた少なくとも一つの電子看板と、前記複数の車両検出手段からの検出情報に基づいて、前記工事規制区間に繋がる前記道路上の車両の渋滞の有無を判定し、判定結果に基づき前記工事情報を報知する前記電子看板の前記報知部の動作を制御する制御手段とを備えたことを特徴とする。
【0008】
本発明の一実施形態においては、前記制御手段が、前記第2箇所にて車両を検知した前記車両検出手段からの検出情報に基づき需要交通量を算出し、前記第1箇所にて車両を検知した前記車両検出手段からの検出情報に基づき捌け交通量を算出し、算出されたこれらの交通量に関する情報を用いて前記渋滞の有無を判定する処理を、前記信号制御のサイクル毎に繰り返して行う。
【0009】
本発明の他の実施形態においては、前記制御手段が、前記判定結果が前記渋滞が有ることを示す場合に、渋滞末尾位置を算出し、この渋滞末尾位置と前記電子看板の設置位置とに基づき前記報知部に前記渋滞末尾位置を表す情報を前記工事情報として報知させ、前記判定結果が前記渋滞が無いことを示す場合に、前記工事規制区間の開始位置と前記電子看板の設置位置とに基づき前記報知部に前記開始位置を表す情報を前記工事情報として報知させる。
【0010】
本発明の更に他の実施形態においては、前記制御手段が、前記判定結果が前記渋滞が有ることを示す場合に、前記工事規制区間の前記車両の通過所要時間を算出すると共に、前記渋滞の滞留長を算出し、これらを表す情報を前記工事情報として前記報知部に報知させる。
【0011】
本発明の更に他の実施形態においては、前記電子看板が、工事規制看板である。
【0012】
本発明の更に他の実施形態においては、工事情報報知システムが、前記第1箇所の近傍箇所に設置された信号手段を更に備え、前記制御手段が、前記検出情報及び予め設定された信号制御パラメータに基づいて、前記信号手段の信号制御を行う。
【発明の効果】
【0013】
本発明によれば、工事規制時の工事情報をできるだけ安価且つ正確に運転手に報知して、運転者の心理的ストレスを低減しながら安全で円滑な交通を実現することが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る工事情報報知システムの全体構成を示す図である。
【図2】同工事情報報知システム配置例を上方から示す図である。
【図3】同工事情報報知システム配置例を側方から示す図である。
【図4】同工事情報報知システムの電子看板における情報の報知例を示す図である。
【図5】同工事情報報知システムにおける工事情報報知処理を示すフローチャートである。
【図6】同工事情報報知システムにおける信号最適化処理を示すフローチャートである。
【発明を実施するための形態】
【0015】
以下、添付の図面を参照して、この発明に係る工事情報報知システムの実施の形態を詳細に説明する。図1は、本発明の一実施形態に係る工事情報報知システムの全体構成を示す図である。図2及び図3は、同工事情報報知システムの配置例を示す図であり、図2は上方から、図3は側方からそれぞれ示している。また、図4は、工事情報報知システムの電子看板における情報の報知例を示す図である。
【0016】
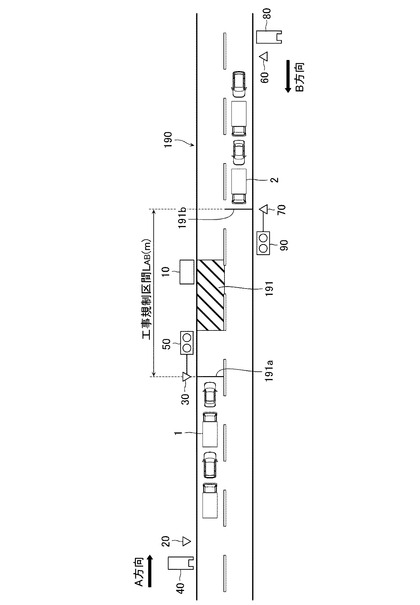
図1〜図3に示すように、工事情報報知システム100は、例えばA方向及びB方向に車両1,2の進行方向が規定された片側一車線道路190に設置される。A方向側の車線上には、工事箇所191が設けられており、それぞれの車線上の停止線191a,191b間が工事規制区間(区間長LAB(m))となっている。すなわち、各停止線191a,191bは、それぞれ工事規制区間の開始位置及び終了位置を示している。
【0017】
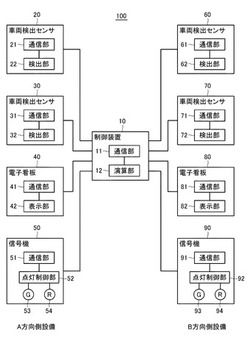
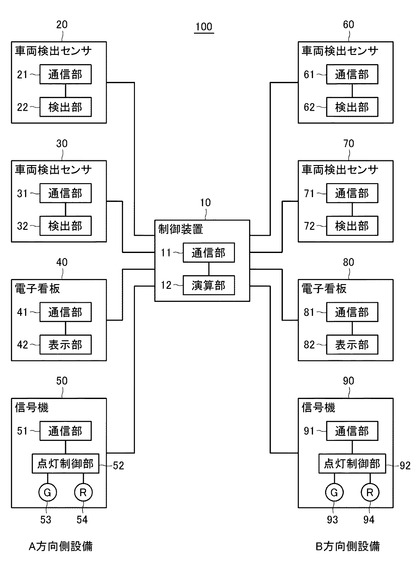
工事情報報知システム100は、A方向側の車線に関する設備(A方向側設備)とB方向側の車線に関する設備(B方向側設備)とを備え、これら各設備を統合的に制御する制御装置10を備えている。これらの設備は、例えば路側帯の内側領域などの車両1の走行に影響を与えない車道外の任意の箇所に設置される。
【0018】
A方向側設備は、例えば停止線191aの側方の第1箇所において車両1を検知可能な位置に設置される車両検出センサ30と、この第1箇所からB方向に所定間隔をおいた第2箇所において車両1を検知可能な位置に設置される車両検出センサ20とを備える。また、A方向側設備は、例えば車両検出センサ30の近傍箇所に設置された信号機50と、車両検出センサ20の近傍箇所に設置された少なくとも一つの電子看板40とを備える。
【0019】
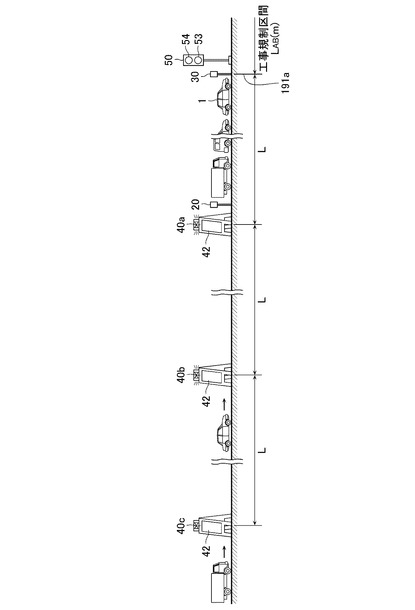
なお、図3に示すように、電子看板40が複数設置された場合は、各電子看板40a〜40cは、第1箇所から車両1の進行方向と逆方向に所定間隔L毎(例えば、100m毎)に設置されればよい。このような電子看板の複数設置態様は、図示は省略するが、B方向側設備についても同様に適用される。電子看板の設置位置を示す情報は、制御装置10に入力されている。
【0020】
車両検出センサ20,30は、それぞれ通信部21,31と、検出部22,32とを備える。通信部21,31は、無線又は有線により検出部22,32にて検知された車両1の通過台数や車速データを検出情報として制御装置10に送信する。検出部22,32は、超音波センサや赤外線センサなどの各種センサにより構成され、主に第1及び第2箇所を通過する車両1の通過台数を検出する。検出部22,32は、複数構成とされていてもよい。これら車両検出センサ20,30には、予め停止線191aからの距離情報が設定されている。
【0021】
電子看板(デジタルサイネージ)40は、工事規制看板として工事規制区間で行われる工事に関連して、道路190上を走行する車両1に影響のある工事情報を報知するために設置される。電子看板40は、例えば通信部41及び表示部42を備える。通信部41は、無線又は有線により、制御装置10から送信されてきた工事情報を受信する。表示部42は、液晶やLED、或いは有機ELパネルなどを備えたディスプレイ装置からなり、通信部41が受信した工事情報を表示する。
【0022】
信号機50は、工事用信号機として工事規制区間における車両の交互通行を制御するものであり、通信部51と、点灯制御部52と、青信号灯53及び赤信号灯54とを備える。通信部51は、無線又は有線により、制御装置10から送信されてきた信号制御情報を受信する。
【0023】
点灯制御部52は、通信部51が受信した信号制御情報と、予め内蔵された図示しない記憶手段に記憶されている信号制御パラメータとに基づいて、青信号灯53及び赤信号灯54の点灯動作を制御する。点灯制御部52は、具体的には点灯時間変更や点灯切替動作などの各種信号動作を制御する。なお、信号制御パラメータは、予め制御装置10に備えられていてもよく、この場合は点灯制御部52は制御装置10の信号制御情報に従って各信号灯53,54の動作のみを実行するような簡易的な構成にすることができる。
【0024】
一方、B方向側設備は、例えば停止線191bの側方の第1箇所において車両2を検知可能な位置に設置される車両検出センサ70と、この第1箇所からA方向に所定間隔をおいた第2箇所において車両2を検知可能な位置に設置される車両検出センサ60とを備える。また、B方向設備は、例えば車両検出センサ70の近傍箇所に設置された信号機90と、車両検出センサ60の近傍箇所に設置された少なくとも一つの電子看板80とを備える。なお、B方向側設備の車両検出センサ60,70、電子看板80、信号機90の各部の構成や作用は、上記A方向側設備と同様であるため、ここでは説明を省略する。
【0025】
制御装置10は、A方向側設備及びB方向側設備を同時に制御することにより、工事情報報知システム100の全体を制御する。制御装置10は、通信部11及び演算部12を備える。通信部11は、無線又は有線により、各車両検出センサ20,30,60,70からの検出情報を受信すると共に、各電子看板40,80及び各信号機50,90に対して工事情報及び信号制御情報を送信する。
【0026】
演算部12は、CPU,RAM,ROMなどを備えてなり、通信部11が受信した検出情報に基づいて、工事規制区間に繋がるA方向の車両1及びB方向の車両2の渋滞の有無を判定する。そして、判定結果に基づき各電子看板40,80の表示部42,82に表示する工事情報を生成し、生成した工事情報を通信部11を介して出力する。これにより、表示部42,82に表示させる工事情報を適宜変更等して、その動作を制御する。
【0027】
渋滞の有無の判定処理は、演算部12により、例えば次のように行われる。なお、以降においては、主にA方向側設備での各種処理について説明するが、B方向側設備についても同様の処理を行うこととする。また、各種処理は信号機50,90の信号制御サイクル毎に繰り返し行われる。ここでは、ある信号制御サイクルをNサイクルとして説明する。
【0028】
演算部12は、車両検出センサ20からの検出情報に基づき、Nサイクル目のA方向の需要交通量q1N(台数)を算出する。また、演算部12は、車両検出センサ30からの検出情報に基づき、Nサイクル目のA方向の捌け交通量q2N(台数)を算出する。そして、算出したこれらの交通量q1N,q2Nの情報に基づいて、渋滞の有無を判定する。
【0029】
なお、渋滞が有ると判定された場合は、例えば渋滞の末尾にある車両1の位置(渋滞末尾位置)を算出して、予め入力された電子看板40(40a〜40c)の設置位置情報により示される設置位置との関係に基づいて、表示部42に表示する適切な渋滞末尾位置を示す工事情報を生成する。
【0030】
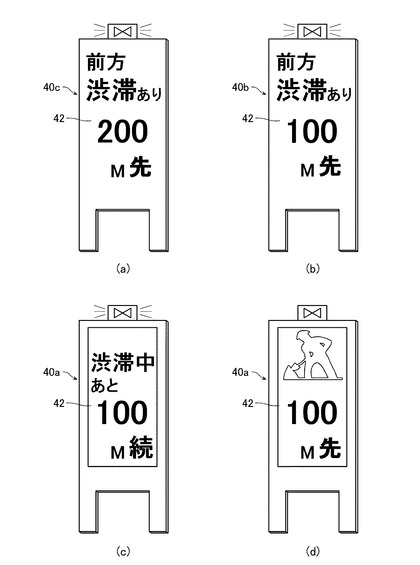
例えば、渋滞が有ると判定され、渋滞末尾位置が停止線191aから100m離れた位置であったとすると、図3及び図4(a)に示すように、停止線191aから300m離れた位置に設置された電子看板40cの表示部42には、「前方渋滞あり200m先」という文字情報からなる工事情報が表示される。
【0031】
また、図3及び図4(b)に示すように、停止線191aから200m離れた位置に設置された電子看板40bの表示部42には、「前方渋滞あり100m先」という工事情報が表示される。更に、図3及び図4(c)に示すように、停止線191aから100m離れた位置に設置された電子看板40aの表示部42には、「渋滞中あと100m続」という工事情報が表示される。
【0032】
一方、渋滞が無いと判定された場合は、例えば図4(d)に示すように、停止線191aから100m離れた位置に設置された電子看板40aの表示部42には、工事中を表すマークと共に「100m先」という文字情報からなる工事情報が表示される。このように、工事情報報知システム100は、工事規制時の工事情報をできるだけ正確に運転手に報知して心理的ストレスを低減することができる。また、各構成部は安価に構成することができる。
【0033】
なお、図2に示したような配置例で適用された工事情報報知システム100における制御シミュレーションでは、工事規制区間の車両1,2の走行速度を30km/h(=8.3m/sec)とし、信号制御初期サイクルでのA方向及びB方向の青信号灯53の点灯時間をそれぞれ30秒間としている。また、赤信号灯54の全赤時間を工事規制区間の区間長LAB/8.3とし、信号制御サイクル長Cを30+30+2×(区間長LAB/8.3)としている。
【0034】
次に、上記のような条件における工事情報報知システム100による工事情報報知処理について説明する。図5は、工事情報報知システムにおける工事情報報知処理を示すフローチャートである。図6は、工事情報報知システムにおける信号最適化処理を示すフローチャートである。
【0035】
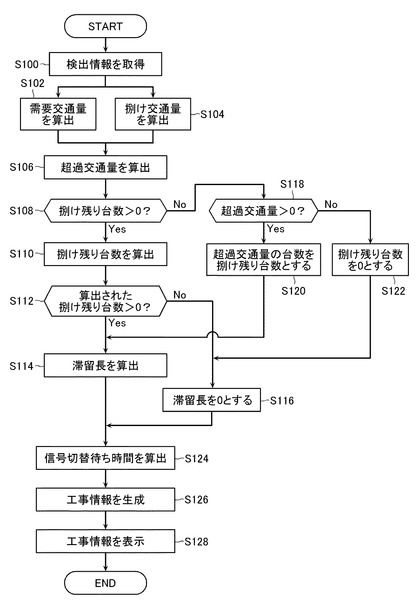
図5に示すように、まず、制御装置10の演算部12は、車両検出センサ20,30からNサイクルでの検出情報を取得し(ステップS100)、Nサイクル目のA方向の需要交通量q1Nを算出する(ステップS102)と共に、Nサイクル目のA方向の捌け交通量q2Nを算出する(ステップS104)。
【0036】
次に、算出した需要交通量q1Nから捌け交通量q2Nを減算して、Nサイクル目のA方向の超過交通量(台数)を算出し(ステップS106)、前回のサイクル(N−1サイクル目)のA方向の捌け残り台数が0より多いか否かを判断する(ステップS108)。捌け残り台数が0より多いと判断された場合(ステップS108のYes)は、N−1サイクル目の捌け残り台数に上記ステップS106にて算出された超過交通量の台数を加算して、Nサイクル目のA方向の捌け残り台数を算出する(ステップS110)。
【0037】
そして、算出した捌け残り台数が0より多いか否かを判断し(ステップS112)、捌け残り台数が0より多いと判断された場合(ステップS112のYes)は、上記ステップS110で算出された捌け残り台数に1台当たり例えば10mの距離を乗算し、Nサイクル目のA方向の滞留長を算出する(ステップS114)。捌け残り台数が0より多くないと判断された場合(ステップS112のNo)は、Nサイクル目のA方向の滞留長を0(m)とする(ステップS116)。
【0038】
一方、上記ステップS108にて、捌け残り台数が0より多くないと判断された場合(ステップS108のNo)は、上記ステップS106にて算出された超過交通量が0より多いか否かを判断する(ステップS118)。超過交通量が0より多いと判断された場合(ステップS118のYes)は、超過交通量の台数をNサイクル目のA方向の捌け残り台数として(ステップS120)、上記ステップS114に移行する。
【0039】
この場合、ステップS114においては、上記ステップS106で算出された超過交通量の台数に1台当たり例えば10mの距離を乗算し、Nサイクル目のA方向の滞留長が算出される。
【0040】
超過交通量が0より多くないと判断された場合(ステップS118のNo)は、Nサイクル目のA方向の捌け残り台数を0として(ステップS122)、上記ステップS116に移行し、Nサイクル目のA方向の滞留長を0とする。そして、演算部12は、次のようにNサイクル目の信号切替待ち時間を算出する(ステップS124)。
【0041】
すなわち、ステップS124においては、上記ステップS116にて滞留長が0とされた場合は、Nサイクル目の信号切替待ち時間をサイクル長C−30(秒)と算出する。また、上記ステップS114にて滞留長が算出された場合は、Nサイクル目の信号切替待ち時間を上記ステップS110又はS120で得られた捌け残り台数を捌け交通量q2Nで除算したものに、サイクル長Cを乗算したもの(秒)とする。
【0042】
こうして信号切替待ち時間を算出したら、電子看板40(40a〜40c)の表示部42に表示すべき工事情報を生成し(ステップS126)、通信部11を介して工事情報を送信して、電子看板40に工事情報を表示させ(ステップS128)、工事情報報知処理を終了する。
【0043】
なお、上記ステップS114又はS116にて滞留長を算出したら、その滞留長を示す情報を工事情報として即座に送信し、電子看板40にて随時表示するようにしてもよい。工事情報報知システム100は、このような工事情報報知処理をA方向側設備及びB方向側設備について、それぞれ信号制御サイクル毎に繰り返して行うことにより、安全で円滑な交互通行の交通を実現する。
【0044】
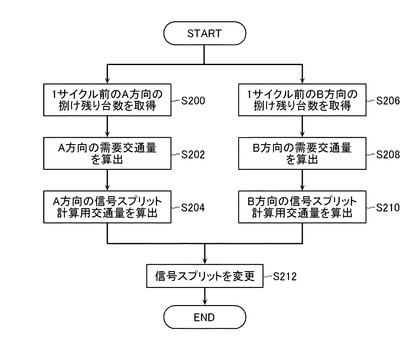
また、信号制御における信号最適化処理は、次のように行われる。ここで、信号制御パラメータとして、信号スプリットを算出する。図6に示すように、演算部12は、1サイクル前(N−1サイクル目)のA方向の捌け残り台数を取得する(ステップS200)と共に、1サイクル前(N−1サイクル目)のB方向の捌け残り台数を取得する(ステップS206)。
【0045】
次に、A方向の需要交通量q1N(台数)を算出する(ステップS202)と共に、B方向の需要交通量q1N(台数)を算出する(ステップS208)。そして、上記ステップS200及びステップS202にて得られた台数を加算して、A方向の信号スプリット計算用交通量αを算出する(ステップS204)と共に、上記ステップS206及びステップS208にて得られた台数を加算して、B方向の信号スプリット計算用交通量βを算出する(ステップS210)。
【0046】
こうして信号スプリット計算用交通量α,βが算出されたら、各方向の信号スプリットを計算して、通信部11を介して信号機50,90に信号制御情報を送信し、信号スプリットを変更して(ステップS212)、信号最適化処理を終了する。信号スプリットの計算は、例えばA方向の信号機50の青信号灯53の点灯時間GA(秒)については、(α/(α+β))×60で求めることができる。また、B方向の信号機90の青信号灯93の点灯時間GB(秒)については、(β/(α+β))×60で求めることができる。なお、上記ステップS200又はS206において、捌け残り台数が1台のときは、信号制御サイクルは、点灯時間GA,GBがそれぞれ30秒の定サイクルとすればよい。
【符号の説明】
【0047】
1,2 車両
10 制御装置
11 通信部
12 演算部
20,30 車両検出センサ
21,31 通信部
22,32 検出部
40 電子看板
41 表示部
50 信号機
51 通信部
52 点灯制御部
53 青信号灯
54 赤信号灯
100 工事情報報知システム
【技術分野】
【0001】
この発明は、道路上の工事に関連して発生する車両に影響のある工事情報を報知する工事情報報知システムに関する。
【背景技術】
【0002】
道路上において工事などが行われる場合、実際の工事箇所を含む所定の区間を工事規制区間として設け、道路上の車両の走行を規制することが行われる。このような工事規制時において、安全性確保の観点から交互通行などの交通整理業務は概ね人手により行われているのが現状である。また、工事規制時においては、工事の状況によるが通常交通による車両の流れが乱されるため、工事規制区間に繋がる車両の渋滞が発生することがある。
【0003】
渋滞が発生した場合は、渋滞末尾位置での車両同士の追突事故等が発生することがあり、車両の運転手は道路状況に十分に注意しながら運転を行う必要がある。このため、渋滞発生時には運転手の心理的ストレスが高まることが多い。なお、このような渋滞などにより発生する各種不具合を解消しようとするために、運転者に対して渋滞に関する情報などを提供するシステムとして、例えば下記特許文献1〜3に開示されたものが知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−288693号公報
【特許文献2】特許第3277127号公報
【特許文献3】特開2008−234489号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1〜3に開示されたものでは、いずれもシステム構成が複雑となるため、情報を提供するためのコストの低減を図り難いという問題がある。特に工事規制時における交互通行などの交通整理業務は人件費が嵩むため、工事規制時の工事情報をできるだけ安価且つ正確に運転手に提供して、運転者の心理的ストレスを低減しつつ安全で円滑な交互通行などを実現することができるシステムが待望されている。
【0006】
本発明は、上記のような事情に鑑みてなされたもので、工事規制時の工事情報をできるだけ安価且つ正確に運転手に報知して、運転者の心理的ストレスを低減しながら安全で円滑な交通を実現することができる工事情報報知システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するため、本発明に係る工事情報報知システムは、道路上の工事規制区間が開始される第1箇所、及びこの第1箇所から車両の進行方向と逆方向に所定間隔をおいた第2箇所において、前記道路上の車両を検知可能な位置にそれぞれ設置される複数の車両検出手段と、前記工事規制区間に関連して前記道路上を走行する車両に影響のある工事情報を報知可能な報知部を備えた少なくとも一つの電子看板と、前記複数の車両検出手段からの検出情報に基づいて、前記工事規制区間に繋がる前記道路上の車両の渋滞の有無を判定し、判定結果に基づき前記工事情報を報知する前記電子看板の前記報知部の動作を制御する制御手段とを備えたことを特徴とする。
【0008】
本発明の一実施形態においては、前記制御手段が、前記第2箇所にて車両を検知した前記車両検出手段からの検出情報に基づき需要交通量を算出し、前記第1箇所にて車両を検知した前記車両検出手段からの検出情報に基づき捌け交通量を算出し、算出されたこれらの交通量に関する情報を用いて前記渋滞の有無を判定する処理を、前記信号制御のサイクル毎に繰り返して行う。
【0009】
本発明の他の実施形態においては、前記制御手段が、前記判定結果が前記渋滞が有ることを示す場合に、渋滞末尾位置を算出し、この渋滞末尾位置と前記電子看板の設置位置とに基づき前記報知部に前記渋滞末尾位置を表す情報を前記工事情報として報知させ、前記判定結果が前記渋滞が無いことを示す場合に、前記工事規制区間の開始位置と前記電子看板の設置位置とに基づき前記報知部に前記開始位置を表す情報を前記工事情報として報知させる。
【0010】
本発明の更に他の実施形態においては、前記制御手段が、前記判定結果が前記渋滞が有ることを示す場合に、前記工事規制区間の前記車両の通過所要時間を算出すると共に、前記渋滞の滞留長を算出し、これらを表す情報を前記工事情報として前記報知部に報知させる。
【0011】
本発明の更に他の実施形態においては、前記電子看板が、工事規制看板である。
【0012】
本発明の更に他の実施形態においては、工事情報報知システムが、前記第1箇所の近傍箇所に設置された信号手段を更に備え、前記制御手段が、前記検出情報及び予め設定された信号制御パラメータに基づいて、前記信号手段の信号制御を行う。
【発明の効果】
【0013】
本発明によれば、工事規制時の工事情報をできるだけ安価且つ正確に運転手に報知して、運転者の心理的ストレスを低減しながら安全で円滑な交通を実現することが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る工事情報報知システムの全体構成を示す図である。
【図2】同工事情報報知システム配置例を上方から示す図である。
【図3】同工事情報報知システム配置例を側方から示す図である。
【図4】同工事情報報知システムの電子看板における情報の報知例を示す図である。
【図5】同工事情報報知システムにおける工事情報報知処理を示すフローチャートである。
【図6】同工事情報報知システムにおける信号最適化処理を示すフローチャートである。
【発明を実施するための形態】
【0015】
以下、添付の図面を参照して、この発明に係る工事情報報知システムの実施の形態を詳細に説明する。図1は、本発明の一実施形態に係る工事情報報知システムの全体構成を示す図である。図2及び図3は、同工事情報報知システムの配置例を示す図であり、図2は上方から、図3は側方からそれぞれ示している。また、図4は、工事情報報知システムの電子看板における情報の報知例を示す図である。
【0016】
図1〜図3に示すように、工事情報報知システム100は、例えばA方向及びB方向に車両1,2の進行方向が規定された片側一車線道路190に設置される。A方向側の車線上には、工事箇所191が設けられており、それぞれの車線上の停止線191a,191b間が工事規制区間(区間長LAB(m))となっている。すなわち、各停止線191a,191bは、それぞれ工事規制区間の開始位置及び終了位置を示している。
【0017】
工事情報報知システム100は、A方向側の車線に関する設備(A方向側設備)とB方向側の車線に関する設備(B方向側設備)とを備え、これら各設備を統合的に制御する制御装置10を備えている。これらの設備は、例えば路側帯の内側領域などの車両1の走行に影響を与えない車道外の任意の箇所に設置される。
【0018】
A方向側設備は、例えば停止線191aの側方の第1箇所において車両1を検知可能な位置に設置される車両検出センサ30と、この第1箇所からB方向に所定間隔をおいた第2箇所において車両1を検知可能な位置に設置される車両検出センサ20とを備える。また、A方向側設備は、例えば車両検出センサ30の近傍箇所に設置された信号機50と、車両検出センサ20の近傍箇所に設置された少なくとも一つの電子看板40とを備える。
【0019】
なお、図3に示すように、電子看板40が複数設置された場合は、各電子看板40a〜40cは、第1箇所から車両1の進行方向と逆方向に所定間隔L毎(例えば、100m毎)に設置されればよい。このような電子看板の複数設置態様は、図示は省略するが、B方向側設備についても同様に適用される。電子看板の設置位置を示す情報は、制御装置10に入力されている。
【0020】
車両検出センサ20,30は、それぞれ通信部21,31と、検出部22,32とを備える。通信部21,31は、無線又は有線により検出部22,32にて検知された車両1の通過台数や車速データを検出情報として制御装置10に送信する。検出部22,32は、超音波センサや赤外線センサなどの各種センサにより構成され、主に第1及び第2箇所を通過する車両1の通過台数を検出する。検出部22,32は、複数構成とされていてもよい。これら車両検出センサ20,30には、予め停止線191aからの距離情報が設定されている。
【0021】
電子看板(デジタルサイネージ)40は、工事規制看板として工事規制区間で行われる工事に関連して、道路190上を走行する車両1に影響のある工事情報を報知するために設置される。電子看板40は、例えば通信部41及び表示部42を備える。通信部41は、無線又は有線により、制御装置10から送信されてきた工事情報を受信する。表示部42は、液晶やLED、或いは有機ELパネルなどを備えたディスプレイ装置からなり、通信部41が受信した工事情報を表示する。
【0022】
信号機50は、工事用信号機として工事規制区間における車両の交互通行を制御するものであり、通信部51と、点灯制御部52と、青信号灯53及び赤信号灯54とを備える。通信部51は、無線又は有線により、制御装置10から送信されてきた信号制御情報を受信する。
【0023】
点灯制御部52は、通信部51が受信した信号制御情報と、予め内蔵された図示しない記憶手段に記憶されている信号制御パラメータとに基づいて、青信号灯53及び赤信号灯54の点灯動作を制御する。点灯制御部52は、具体的には点灯時間変更や点灯切替動作などの各種信号動作を制御する。なお、信号制御パラメータは、予め制御装置10に備えられていてもよく、この場合は点灯制御部52は制御装置10の信号制御情報に従って各信号灯53,54の動作のみを実行するような簡易的な構成にすることができる。
【0024】
一方、B方向側設備は、例えば停止線191bの側方の第1箇所において車両2を検知可能な位置に設置される車両検出センサ70と、この第1箇所からA方向に所定間隔をおいた第2箇所において車両2を検知可能な位置に設置される車両検出センサ60とを備える。また、B方向設備は、例えば車両検出センサ70の近傍箇所に設置された信号機90と、車両検出センサ60の近傍箇所に設置された少なくとも一つの電子看板80とを備える。なお、B方向側設備の車両検出センサ60,70、電子看板80、信号機90の各部の構成や作用は、上記A方向側設備と同様であるため、ここでは説明を省略する。
【0025】
制御装置10は、A方向側設備及びB方向側設備を同時に制御することにより、工事情報報知システム100の全体を制御する。制御装置10は、通信部11及び演算部12を備える。通信部11は、無線又は有線により、各車両検出センサ20,30,60,70からの検出情報を受信すると共に、各電子看板40,80及び各信号機50,90に対して工事情報及び信号制御情報を送信する。
【0026】
演算部12は、CPU,RAM,ROMなどを備えてなり、通信部11が受信した検出情報に基づいて、工事規制区間に繋がるA方向の車両1及びB方向の車両2の渋滞の有無を判定する。そして、判定結果に基づき各電子看板40,80の表示部42,82に表示する工事情報を生成し、生成した工事情報を通信部11を介して出力する。これにより、表示部42,82に表示させる工事情報を適宜変更等して、その動作を制御する。
【0027】
渋滞の有無の判定処理は、演算部12により、例えば次のように行われる。なお、以降においては、主にA方向側設備での各種処理について説明するが、B方向側設備についても同様の処理を行うこととする。また、各種処理は信号機50,90の信号制御サイクル毎に繰り返し行われる。ここでは、ある信号制御サイクルをNサイクルとして説明する。
【0028】
演算部12は、車両検出センサ20からの検出情報に基づき、Nサイクル目のA方向の需要交通量q1N(台数)を算出する。また、演算部12は、車両検出センサ30からの検出情報に基づき、Nサイクル目のA方向の捌け交通量q2N(台数)を算出する。そして、算出したこれらの交通量q1N,q2Nの情報に基づいて、渋滞の有無を判定する。
【0029】
なお、渋滞が有ると判定された場合は、例えば渋滞の末尾にある車両1の位置(渋滞末尾位置)を算出して、予め入力された電子看板40(40a〜40c)の設置位置情報により示される設置位置との関係に基づいて、表示部42に表示する適切な渋滞末尾位置を示す工事情報を生成する。
【0030】
例えば、渋滞が有ると判定され、渋滞末尾位置が停止線191aから100m離れた位置であったとすると、図3及び図4(a)に示すように、停止線191aから300m離れた位置に設置された電子看板40cの表示部42には、「前方渋滞あり200m先」という文字情報からなる工事情報が表示される。
【0031】
また、図3及び図4(b)に示すように、停止線191aから200m離れた位置に設置された電子看板40bの表示部42には、「前方渋滞あり100m先」という工事情報が表示される。更に、図3及び図4(c)に示すように、停止線191aから100m離れた位置に設置された電子看板40aの表示部42には、「渋滞中あと100m続」という工事情報が表示される。
【0032】
一方、渋滞が無いと判定された場合は、例えば図4(d)に示すように、停止線191aから100m離れた位置に設置された電子看板40aの表示部42には、工事中を表すマークと共に「100m先」という文字情報からなる工事情報が表示される。このように、工事情報報知システム100は、工事規制時の工事情報をできるだけ正確に運転手に報知して心理的ストレスを低減することができる。また、各構成部は安価に構成することができる。
【0033】
なお、図2に示したような配置例で適用された工事情報報知システム100における制御シミュレーションでは、工事規制区間の車両1,2の走行速度を30km/h(=8.3m/sec)とし、信号制御初期サイクルでのA方向及びB方向の青信号灯53の点灯時間をそれぞれ30秒間としている。また、赤信号灯54の全赤時間を工事規制区間の区間長LAB/8.3とし、信号制御サイクル長Cを30+30+2×(区間長LAB/8.3)としている。
【0034】
次に、上記のような条件における工事情報報知システム100による工事情報報知処理について説明する。図5は、工事情報報知システムにおける工事情報報知処理を示すフローチャートである。図6は、工事情報報知システムにおける信号最適化処理を示すフローチャートである。
【0035】
図5に示すように、まず、制御装置10の演算部12は、車両検出センサ20,30からNサイクルでの検出情報を取得し(ステップS100)、Nサイクル目のA方向の需要交通量q1Nを算出する(ステップS102)と共に、Nサイクル目のA方向の捌け交通量q2Nを算出する(ステップS104)。
【0036】
次に、算出した需要交通量q1Nから捌け交通量q2Nを減算して、Nサイクル目のA方向の超過交通量(台数)を算出し(ステップS106)、前回のサイクル(N−1サイクル目)のA方向の捌け残り台数が0より多いか否かを判断する(ステップS108)。捌け残り台数が0より多いと判断された場合(ステップS108のYes)は、N−1サイクル目の捌け残り台数に上記ステップS106にて算出された超過交通量の台数を加算して、Nサイクル目のA方向の捌け残り台数を算出する(ステップS110)。
【0037】
そして、算出した捌け残り台数が0より多いか否かを判断し(ステップS112)、捌け残り台数が0より多いと判断された場合(ステップS112のYes)は、上記ステップS110で算出された捌け残り台数に1台当たり例えば10mの距離を乗算し、Nサイクル目のA方向の滞留長を算出する(ステップS114)。捌け残り台数が0より多くないと判断された場合(ステップS112のNo)は、Nサイクル目のA方向の滞留長を0(m)とする(ステップS116)。
【0038】
一方、上記ステップS108にて、捌け残り台数が0より多くないと判断された場合(ステップS108のNo)は、上記ステップS106にて算出された超過交通量が0より多いか否かを判断する(ステップS118)。超過交通量が0より多いと判断された場合(ステップS118のYes)は、超過交通量の台数をNサイクル目のA方向の捌け残り台数として(ステップS120)、上記ステップS114に移行する。
【0039】
この場合、ステップS114においては、上記ステップS106で算出された超過交通量の台数に1台当たり例えば10mの距離を乗算し、Nサイクル目のA方向の滞留長が算出される。
【0040】
超過交通量が0より多くないと判断された場合(ステップS118のNo)は、Nサイクル目のA方向の捌け残り台数を0として(ステップS122)、上記ステップS116に移行し、Nサイクル目のA方向の滞留長を0とする。そして、演算部12は、次のようにNサイクル目の信号切替待ち時間を算出する(ステップS124)。
【0041】
すなわち、ステップS124においては、上記ステップS116にて滞留長が0とされた場合は、Nサイクル目の信号切替待ち時間をサイクル長C−30(秒)と算出する。また、上記ステップS114にて滞留長が算出された場合は、Nサイクル目の信号切替待ち時間を上記ステップS110又はS120で得られた捌け残り台数を捌け交通量q2Nで除算したものに、サイクル長Cを乗算したもの(秒)とする。
【0042】
こうして信号切替待ち時間を算出したら、電子看板40(40a〜40c)の表示部42に表示すべき工事情報を生成し(ステップS126)、通信部11を介して工事情報を送信して、電子看板40に工事情報を表示させ(ステップS128)、工事情報報知処理を終了する。
【0043】
なお、上記ステップS114又はS116にて滞留長を算出したら、その滞留長を示す情報を工事情報として即座に送信し、電子看板40にて随時表示するようにしてもよい。工事情報報知システム100は、このような工事情報報知処理をA方向側設備及びB方向側設備について、それぞれ信号制御サイクル毎に繰り返して行うことにより、安全で円滑な交互通行の交通を実現する。
【0044】
また、信号制御における信号最適化処理は、次のように行われる。ここで、信号制御パラメータとして、信号スプリットを算出する。図6に示すように、演算部12は、1サイクル前(N−1サイクル目)のA方向の捌け残り台数を取得する(ステップS200)と共に、1サイクル前(N−1サイクル目)のB方向の捌け残り台数を取得する(ステップS206)。
【0045】
次に、A方向の需要交通量q1N(台数)を算出する(ステップS202)と共に、B方向の需要交通量q1N(台数)を算出する(ステップS208)。そして、上記ステップS200及びステップS202にて得られた台数を加算して、A方向の信号スプリット計算用交通量αを算出する(ステップS204)と共に、上記ステップS206及びステップS208にて得られた台数を加算して、B方向の信号スプリット計算用交通量βを算出する(ステップS210)。
【0046】
こうして信号スプリット計算用交通量α,βが算出されたら、各方向の信号スプリットを計算して、通信部11を介して信号機50,90に信号制御情報を送信し、信号スプリットを変更して(ステップS212)、信号最適化処理を終了する。信号スプリットの計算は、例えばA方向の信号機50の青信号灯53の点灯時間GA(秒)については、(α/(α+β))×60で求めることができる。また、B方向の信号機90の青信号灯93の点灯時間GB(秒)については、(β/(α+β))×60で求めることができる。なお、上記ステップS200又はS206において、捌け残り台数が1台のときは、信号制御サイクルは、点灯時間GA,GBがそれぞれ30秒の定サイクルとすればよい。
【符号の説明】
【0047】
1,2 車両
10 制御装置
11 通信部
12 演算部
20,30 車両検出センサ
21,31 通信部
22,32 検出部
40 電子看板
41 表示部
50 信号機
51 通信部
52 点灯制御部
53 青信号灯
54 赤信号灯
100 工事情報報知システム
【特許請求の範囲】
【請求項1】
道路上の工事規制区間が開始される第1箇所、及びこの第1箇所から車両の進行方向と逆方向に所定間隔をおいた第2箇所において、前記道路上の車両を検知可能な位置にそれぞれ設置される複数の車両検出手段と、
前記工事規制区間に関連して前記道路上を走行する車両に影響のある工事情報を報知可能な報知部を備えた少なくとも一つの電子看板と、
前記複数の車両検出手段からの検出情報に基づいて、前記工事規制区間に繋がる前記道路上の車両の渋滞の有無を判定し、判定結果に基づき前記工事情報を報知する前記電子看板の前記報知部の動作を制御する制御手段と
を備えたことを特徴とする工事情報報知システム。
【請求項2】
前記制御手段は、
前記第2箇所にて車両を検知した前記車両検出手段からの検出情報に基づき需要交通量を算出すると共に、前記第1箇所にて車両を検知した前記車両検出手段からの検出情報に基づき捌け交通量を算出し、算出されたこれらの交通量に関する情報を用いて前記渋滞の有無を判定する処理を、前記信号制御のサイクル毎に繰り返して行う
ことを特徴とする請求項1記載の工事情報報知システム。
【請求項3】
前記制御手段は、
前記判定結果が前記渋滞が有ることを示す場合に、渋滞末尾位置を算出し、この渋滞末尾位置と前記電子看板の設置位置とに基づき前記報知部に前記渋滞末尾位置を表す情報を前記工事情報として報知させ、
前記判定結果が前記渋滞が無いことを示す場合に、前記工事規制区間の開始位置と前記電子看板の設置位置とに基づき前記報知部に前記開始位置を表す情報を前記工事情報として報知させる
ことを特徴とする請求項1又は2記載の工事情報報知システム。
【請求項4】
前記制御手段は、
前記判定結果が前記渋滞が有ることを示す場合に、前記工事規制区間の前記車両の通過所要時間を算出すると共に、前記渋滞の滞留長を算出し、これらを示す情報を前記工事情報として前記報知部に報知させる
ことを特徴とする請求項1〜3のいずれか1項記載の工事情報報知システム。
【請求項5】
前記電子看板は、工事規制看板である
ことを特徴とする請求項1〜4のいずれか1項記載の工事情報報知システム。
【請求項6】
前記第1箇所の近傍箇所に設置された信号手段を更に備え、
前記制御手段は、前記検出情報及び予め設定された信号制御パラメータに基づいて、前記信号手段の信号制御を行う
ことを特徴とする請求項1〜5のいずれか1項記載の工事情報報知システム。
【請求項1】
道路上の工事規制区間が開始される第1箇所、及びこの第1箇所から車両の進行方向と逆方向に所定間隔をおいた第2箇所において、前記道路上の車両を検知可能な位置にそれぞれ設置される複数の車両検出手段と、
前記工事規制区間に関連して前記道路上を走行する車両に影響のある工事情報を報知可能な報知部を備えた少なくとも一つの電子看板と、
前記複数の車両検出手段からの検出情報に基づいて、前記工事規制区間に繋がる前記道路上の車両の渋滞の有無を判定し、判定結果に基づき前記工事情報を報知する前記電子看板の前記報知部の動作を制御する制御手段と
を備えたことを特徴とする工事情報報知システム。
【請求項2】
前記制御手段は、
前記第2箇所にて車両を検知した前記車両検出手段からの検出情報に基づき需要交通量を算出すると共に、前記第1箇所にて車両を検知した前記車両検出手段からの検出情報に基づき捌け交通量を算出し、算出されたこれらの交通量に関する情報を用いて前記渋滞の有無を判定する処理を、前記信号制御のサイクル毎に繰り返して行う
ことを特徴とする請求項1記載の工事情報報知システム。
【請求項3】
前記制御手段は、
前記判定結果が前記渋滞が有ることを示す場合に、渋滞末尾位置を算出し、この渋滞末尾位置と前記電子看板の設置位置とに基づき前記報知部に前記渋滞末尾位置を表す情報を前記工事情報として報知させ、
前記判定結果が前記渋滞が無いことを示す場合に、前記工事規制区間の開始位置と前記電子看板の設置位置とに基づき前記報知部に前記開始位置を表す情報を前記工事情報として報知させる
ことを特徴とする請求項1又は2記載の工事情報報知システム。
【請求項4】
前記制御手段は、
前記判定結果が前記渋滞が有ることを示す場合に、前記工事規制区間の前記車両の通過所要時間を算出すると共に、前記渋滞の滞留長を算出し、これらを示す情報を前記工事情報として前記報知部に報知させる
ことを特徴とする請求項1〜3のいずれか1項記載の工事情報報知システム。
【請求項5】
前記電子看板は、工事規制看板である
ことを特徴とする請求項1〜4のいずれか1項記載の工事情報報知システム。
【請求項6】
前記第1箇所の近傍箇所に設置された信号手段を更に備え、
前記制御手段は、前記検出情報及び予め設定された信号制御パラメータに基づいて、前記信号手段の信号制御を行う
ことを特徴とする請求項1〜5のいずれか1項記載の工事情報報知システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−50840(P2013−50840A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−188248(P2011−188248)
【出願日】平成23年8月31日(2011.8.31)
【出願人】(300041192)宇部興産機械株式会社 (268)
【出願人】(502341122)株式会社福山コンサルタント (3)
【出願人】(511212181)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月31日(2011.8.31)
【出願人】(300041192)宇部興産機械株式会社 (268)
【出願人】(502341122)株式会社福山コンサルタント (3)
【出願人】(511212181)
【Fターム(参考)】
[ Back to top ]