
工作物の機械加工のシミュレーション
【課題】切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための、コンピュータ実施方法を提供する。
【解決手段】工作物および切削ツールの軌道を表すモデル化されたボリュームを提供するステップ(S10)と、切削ツールの衝突掃引を決定するステップ(S20)であって、衝突掃引は、切削ツールが軌道をたどる場合に、切削ツールの非切削前部によって掃引されるボリュームを表す、ステップ(S20)と、決定するステップ(S20)に従って工作物との衝突をテストするステップ(S30)と、を含む方法により、切削ツールによる工作物の機械加工のシミュレーションを向上させる。
【解決手段】工作物および切削ツールの軌道を表すモデル化されたボリュームを提供するステップ(S10)と、切削ツールの衝突掃引を決定するステップ(S20)であって、衝突掃引は、切削ツールが軌道をたどる場合に、切削ツールの非切削前部によって掃引されるボリュームを表す、ステップ(S20)と、決定するステップ(S20)に従って工作物との衝突をテストするステップ(S30)と、を含む方法により、切削ツールによる工作物の機械加工のシミュレーションを向上させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、コンピュータプログラムおよびシステムの分野に関し、より詳細には、切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための方法、システム、およびプログラムに関する。
【背景技術】
【0002】
物体の設計、エンジニアリング、および製造に関する市場には、いくつかのシステムおよびプログラムが提供されている。CADはコンピュータ支援設計の頭字語であり、例えば物体を設計するためのソフトウェアソリューションに関する。CAEはコンピュータ支援エンジニアリングの頭字語であり、例えば将来の製品の物理的挙動をシミュレートするためのソフトウェアソリューションに関する。CAMはコンピュータ支援製造の頭字語であり、例えば製造のプロセスおよび動作を定義するためのソフトウェアソリューションに関する。こうしたシステムにおいて、技法の効率に関しては、グラフィカルユーザインターフェース(GUI)が重要な役割を果たす。これらの技法は、製品ライフサイクル管理(PLM)システム内に埋め込むことが可能である。PLMは、拡張された企業の概念全体にわたって、企業が製品データを共有し、共通のプロセスを適用し、製品の出現から寿命の終了まで製品の開発に関する企業知識を活用するための一助となる、ビジネス戦略を指す。
【0003】
Dassault Systemsによって(商標CATIA、ENOVIA、およびDELMIAで)提供されるPLMソリューションは、製品エンジニアリング知識を組織化するエンジニアリングハブ、製造エンジニアリング知識を管理する製造ハブ、ならびに、エンジニアリングハブおよび製造ハブの両方への企業の統合および接続を可能にする企業ハブを提供する。すべてが一緒になって、システムは、動的な知識ベースの製品創出および意思決定支援を可能にするように製品、プロセス、リソースをリンクし、最適化された製品の定義、製造準備、生産、およびサービスを推進するオープンオブジェクトモデルをもたらす。
【0004】
これらのシステムのいくつかは、切削ツールによる工作物の機械加工のシミュレーションを可能にする。しかしながら、これらのシステムはしばしば不十分なシミュレーションの原因となる。
【0005】
こうしたシステムの例が、論文(例えば、非特許文献1および非特許文献2を参照)に記載されている。
【0006】
いくつかのシステムは、デクセルのセットを用いたモデル化されたボリュームの表現を可能にする。いくつかの文書では、機械加工シミュレーションまたは対話型彫刻に関してデクセル表現を使用することを特に提案している。
【0007】
こうした文書の例(例えば、非特許文献3、非特許文献4、非特許文献5、非特許文献6、非特許文献7、非特許文献8、非特許文献9、特許文献1、および特許文献2を参照)がある。
【0008】
GPGPU(General−Purpose computing on Graphics Processing Units)は、従来は中央処理ユニット(CPU)によって処理されるアプリケーション内の計算を実行するために、通常はコンピュータグラフィック専用の計算を処理するグラフィック処理ユニット(GPU)を使用する技法である。いくつかの論文では、デクセル表現に関して現在のグラフィック処理ユニット(GPU)の計算能力を使用することについて考察している。これらの論文は、特定のメモリモデルに関連付けられたLDNI(Layered Depth−Normal Images)アルゴリズムを使用している。
【0009】
こうした論文の例(例えば、非特許文献10および非特許文献11を参照)がある。
【0010】
これに関連して、切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための改良されたソリューションが、依然として求められている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】米国特許第5710709号明細書
【特許文献2】米国特許第7747418号明細書
【非特許文献】
【0012】
【非特許文献1】"Precise global collision detection in multi-axis NC-machining", Oleg Ilushina, Gershon Elberb, Dan Halperin, Ron Wein, Myung-Soo Kim, Computer-Aided Design 37 (2005) 909 - 920
【非特許文献2】"The sweep plane algorithm for global collision detection with workpiece geometry update for five-axis NC machining", T.D. Tang, Erik I., J. Bohez, Pisut Koomsap, Computer-Aided Design 39 (2007) 1012 - 1024
【非特許文献3】"A Virtual Sculpting System Based on Triple Dexel Models with Haptics", Xiaobo Peng and Weihan Zhang, Computer-Aided Design and Applications, 2009
【非特許文献4】"NC Milling Error Assessment and Tool Path Correction", Yunching Huang and James H. Oliver, Proceedings of the 21st annual conference on Computer graphics and interactive techniques, 1994
【非特許文献5】"NC milling simulation and dimensional verification via dexel representation", Oliver, J.H, and Huang, Y., US Patent 5,710,709 - 1998
【非特許文献6】"Online Sculpting and Visualization of Multi-Dexel Volumes", Heinrich Muller, Tobias Surmann, Marc Stautner, Frank Albersmann, Klaus Weinert, SM '03 Proceedings of the eighth ACM symposium on Solid modeling and applications
【非特許文献7】"Virtual prototyping and manufacturing planning by using tri-dexel models and haptic force feedback", Yongfu Ren, Susana K. Lai-Yuen and Yuan-Shin Lee, Virtual and Physical Prototyping, 2006
【非特許文献8】"Simulation of NC machining based on the dexel model: A critical analysis", Sabine Stiffer, The International Journal of Advanced Manufacturing Technology, 1995
【非特許文献9】"Real time simulation and visualization of NC milling processes for inhomogeneous materials on low-end graphics hardware", Konig, A.N. and Groller, E., Computer Graphics International, 1998. Proceedings
【非特許文献10】"GPGPU-based Material Removal Simulation and Cutting Force Estimation", B. Tukora and T. Szalay, CCP: 94: Proceedings Of The Seventh International Conference On Engineering Computational Technology
【非特許文献11】"Layered Depth-Normal Images: a Sparse Implicit Representation of Solid Models", Charlie C. L. Wang and Yong Chen, Proceedings of ASME international design engineering technical conferences. Brooklyn (NY)
【発明の概要】
【発明が解決しようとする課題】
【0013】
したがって、一態様によれば、切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための、コンピュータ実施方法が提供される。この方法は、工作物および切削ツールの軌道を表すモデル化されたボリュームを提供することを含む。この方法は、切削ツールの衝突掃引を決定することも含む。衝突掃引とは、切削ツールが軌道をたどる場合に、切削ツールの非切削前部によって掃引されるボリュームを表す。この方法は、決定ステップに従って工作物との衝突をテストすることも含む。
【課題を解決するための手段】
【0014】
この方法は、以下のうちの1つまたは複数を含むことができる。
【0015】
− この方法は、切削ツールの保護前部(protective front)を決定することを含み、衝突掃引を決定することは、非切削部によって掃引されるボリュームおよび保護前部によって掃引されるボリュームを決定することを含む。
【0016】
− 工作物はデクセルのセットによって表され、各デクセルは線と工作物との間の交差を表す少なくとも1つのセグメントのセットを含み、衝突をテストすることは、それぞれのデクセルについて、保護前部によって掃引されるボリュームと交差するそれぞれのデクセルのセグメントを決定すること、それに応じてそれぞれのデクセルを更新すること、および、更新されたそれぞれのデクセルのセグメントが非切削部によって掃引されるボリュームと交差するかどうかを評価することを含む。
【0017】
− 切削部は凸状であり、それぞれのデクセルのセグメントは順序付けられ、それぞれのデクセルを更新することは、保護前部によって掃引されるボリュームと交差する最小順番のセグメントを短縮すること、保護前部によって掃引されるボリュームと交差する最大順番のセグメントを短縮すること、および、最小順番のセグメントと最大順番のセグメントとの間のすべてのセグメントを除去することを含む。
【0018】
− 衝突掃引を決定することは、切削ツールが軌道をたどる場合、切削ツールの非切削前部によって掃引されるボリュームを決定することを含む。
【0019】
CAMシステムは、上記方法を実行するための命令が記録されているメモリと、メモリに結合されたプロセッサと、プロセッサに結合され、命令を実行するように好適な、少なくとも1つのグラフィカルユーザインターフェースとを備えることが、さらに提案される。
【0020】
プロセッサは、GPU(グラフィック処理ユニット)であってよい。
【0021】
上記方法を実行するための命令を含むコンピュータプログラムが、さらに提案される。
【0022】
上記コンピュータプログラムが記録されているコンピュータ読み取り可能記憶媒体が、さらに提案される。
【図面の簡単な説明】
【0023】
次に、本発明の実施形態について、非限定的な例を用いて添付の図面を参照しながら説明する。
【0024】
【図1】本発明の方法の例を示す流れ図である。
【図2】本発明のグラフィカルユーザインターフェースの例を示す図である。
【図3】本発明のクライアントコンピュータシステムの例を示す図である。
【図4】本発明の方法の例を示す図である。
【図5】本発明の方法の例を示す図である。
【図6】本発明の方法の例を示す図である。
【図7】本発明の方法の例を示す図である。
【図8】本発明の方法の例を示す図である。
【図9】本発明の方法の例を示す図である。
【図10】本発明の方法の例を示す図である。
【図11】本発明の方法の例を示す図である。
【図12】本発明の方法の例を示す図である。
【図13】本発明の方法の例を示す図である。
【図14】本発明の方法の例を示す図である。
【図15】本発明の方法の例を示す図である。
【図16】本発明の方法の例を示す図である。
【図17】本発明の方法の例を示す図である。
【図18】本発明の方法の例を示す図である。
【図19】本発明の方法の例を示す図である。
【図20】本発明の方法の例を示す図である。
【図21】本発明の方法の例を示す図である。
【発明を実施するための形態】
【0025】
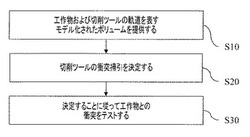
図1は、切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための、コンピュータ実施方法の例の流れ図を示す。この方法は、工作物および切削ツールの軌道を表すモデル化されたボリュームを提供すること(S10)を含む。この方法は、切削ツールの衝突掃引を決定すること(S20)も含む。衝突掃引とは、切削ツールが軌道をたどる場合に、切削ツールの非切削前部によって掃引されるボリュームを表す。この方法は、決定することに従って工作物との衝突をテストすること(S30)をさらに含む。こうした方法によって、切削ツールによる工作物の機械加工のシミュレーションが向上する。
【0026】
この方法は、製造物体を表すCADモデル化物体を設計するプロセスを含むことができる。製造物体は、任意の物理的製品とすることが可能であり、工作物上で実行される機械加工プロセスに従って製造することが可能である。例えば製造物体は、切削ツールによりストックを機械加工することによって取得可能である。工作物は、機械加工中静止しているようなストックからなる。この方法は、こうした機械加工をシミュレートする。
【0027】
「CADモデル化物体を設計すること」は、モデル化された物体を精密に作り上げるプロセスの少なくとも一部である、任意のアクションまたは一連のアクションを指定する。例えばこの方法は、工作物を表すモデル化されたボリュームをストックとして提供すること、および、モデル化されたボリュームの切削をシミュレートすること(したがってストックの切削をシミュレートすること)によって工作物の機械加工をシミュレートすることを、含むことができる。モデル化されたボリュームは、工作物によって占有される3D空間を定義する。したがって、モデル化されたボリュームはモデル化された立体である。この方法は、切削部および非切削部を有する切削ツールによる工作物の機械加工のシミュレーションを向上させるものであるため、この方法は、製造物体を表すCADモデル化物体の設計も向上させる。
【0028】
モデル化された物体とは、コンピュータシステムのメモリ内に格納されたデータによって定義される任意の物体である。拡大解釈すれば、「モデル化された物体」という表現は、データ自体を指定する。CADモデル化物体とは、CADシステムのメモリ内に格納されたデータによって定義される任意の物体である。システムのタイプにより、モデル化された物体は異なる種類のデータによって定義することができる。CADシステムとは、CATIAなどの、モデル化された物体のグラフィック表現に基づいてモデル化された物体を設計するために少なくとも好適な、任意のシステムである。したがって、CADモデル化物体を定義するデータは、モデル化された物体の表現を可能にするデータ(例えば、例えば空間内の相対的位置を含む、幾何学データ)を含む。
【0029】
この方法は、方法の実行後、方法によってシミュレートされた機械加工プロセスに従って製造物体を生産することを含むことが可能な、製造プロセスに含まれることが可能である。言い換えれば、テスト(S30)の後、例えば、テスト(S30)によって衝突がない旨の結果が引き出された場合、方法は、軌道に従い切削ツールによって(モデル化された物体によって表される)工作物を実際に切削することを含むことができる。製造物体は、部品または部品のアセンブリなどの製品とすることができる。この方法はモデル化された物体の設計を向上させるものであるため、この方法は、製品の製造を向上させ、製造プロセスの生産性を向上させるものでもある。この方法は、DELMIAなどのCAMシステムを使用して実施することが可能である。CAMシステムとは、製造のプロセスおよび動作を定義、シミュレート、および制御するために少なくとも好適な、任意のシステムである。
【0030】
この方法はコンピュータ実施される。すなわち、この方法は、少なくとも1台のコンピュータ、または任意の同様のシステム上で実行される。特に言及されていない限り、方法のすべてのステップは、コンピュータによって、すなわちユーザの介入なしに実行される。例えば、決定ステップ(S20)およびテストステップ(S30)は単独のコンピュータによって実施することができ、提供ステップ(S10)は単独のコンピュータによって、またはユーザ対話を通じて実施することができる。これによって方法は、機械加工の自動テストが可能となる。
【0031】
この方法のコンピュータ実施の典型的な例は、この目的に好適なシステムによって方法を実行することである。システムは、方法を実行するための命令が記録されたメモリを備えることができる。言い換えれば、ソフトウェアは即時使用のためにメモリ上に既に準備されている。したがってシステムは、任意の他のソフトウェアをインストールせずに、方法を実行するために好適である。こうしたシステムは、命令を実行するためにメモリに結合された少なくとも1つのプロセッサを備えることも可能である。言い換えればシステムは、プロセッサに結合されたメモリ上に符号化された命令を備え、この命令が、方法を実行するための手段を提供する。こうしたシステムは、モデル化されたボリュームを設計するための効率的なツールである。
【0032】
こうしたシステムは、CADまたはCAMシステムとすることができる。システムは、CAEシステムとすることも可能であり、モデル化された物体はCAEモデル化物体および/またはCAMモデル化物体とすることも可能である。実際には、モデル化された物体がこれらのシステムの任意の組み合わせに対応するデータによって定義可能であるため、CAD、CAE、およびCAMシステムは互いに排他的ではない。
【0033】
システムは、例えばユーザによって命令の実行を開始するための少なくとも1つのグラフィカルユーザインターフェース(GUI)を備えることができる。特に、GUIは、モデル化されたボリュームを設計すること、および/もしくはスクラッチからの切削ツールの軌道を定義することによって、ならびに/または、モデル化されたボリュームおよび/もしくは切削ツールの軌道を、システムのメモリから、または例えばネットワークサービスによってシステムに結合されているがシステムの外部にあるメモリから取り出すことによって、ユーザが提供ステップ(S10)を開始できるようにすることができる。GUIはGPUを含むことができる。このような場合、プロセッサはGPUとすることができる。言い換えれば、少なくともこの方法のステップ、特に決定ステップ(S20)および/またはテストステップ(S30)を実行するプロセッサは、GPUとすることができる。こうしたシステムは、ユーザによってモデル化されたボリュームを設計するための効率的なツールである。これは、モデル化されたボリュームがデクセルのセットとして提供される場合に、特に有利である。デクセルベースのアルゴリズムは、超並列ハードウェアに好適であるため、最新のグラフィック処理ユニット(GPU)の計算機能の使用を考慮するのは当然である。
【0034】
モデル化されたボリュームは3D(すなわち3次元)とすることができる。これは、モデル化されたボリュームが、その3D表現を可能にするデータによって定義されることを意味する。3D表現は、すべての角度から表されたボリュームを見ることができるようにする。例えばモデル化されたボリュームは、3Dで表された場合、その任意の軸を中心に、または表現が表示される画面内の任意の軸を中心に、処理および回転することができる。これは特に、3Dモデル化されていない2Dアイコンを排除する。3D表現の表示は、設計を容易にする(すなわち、設計者が統計的に自分のタスクを実施する速度を上げる)。製品の設計は製造プロセスの一部であるため、これによって業界における製造プロセスの速度が上昇する。
【0035】
図2は、典型的なCADシステムのGUIの例を示す。
【0036】
GUI2100は、標準メニューバー2110、2120、ならびに下部およびサイドのツールバー2140、2150を有する、典型的なCAD様インターフェースとすることができる。こうしたメニューバーおよびツールバーは、ユーザ選択可能アイコンのセットを含み、各アイコンは、当分野で知られるような1つまたは複数の操作または機能に関連付けられている。これらのアイコンのうちのいくつかは、GUI2100内に表示された3Dモデル化された物体2000上での編集および/または作業に適合した、ソフトウェアツールに関連付けられる。ソフトウェアツールはワークベンチにグループ分けすることができる。各ワークベンチはソフトウェアツールのサブセットを含む。特に、ワークベンチのうちの1つは、モデル化された製品2000の幾何学的特徴を編集するのに好適な編集ワークベンチである。操作時に、設計者は例えば物体2000の一部を事前に選択し、その後、操作(例えば彫刻操作、または寸法、色などを変更するような任意の他の操作)を開始するか、または適切なアイコンを選択することによって幾何学的制約を編集することができる。例えば、典型的なCAD操作は、画面上に表示された3Dモデル化物体のパンチングまたはフォールディングのモデル化である。
【0037】
GUIは、例えば、表示された製品2000に関するデータ2500を表示することができる。図2の例では、「特徴ツリー」として表示されたデータ2500およびそれらの3Dモデル化された物体2000は、ブレーキのキャリパおよびディスクを含むブレーキアセンブリに関連する。GUIは、例えば、物体の3D配向を容易にするため、編集された製品の動作のシミュレーションをトリガするため、または表示された製品2000の様々な属性をレンダリングするために、様々なタイプのグラフィックツール2130、2070、2080をさらに示すことができる。カーソル2060は、ユーザがグラフィックツールと対話できるようにするために、触覚デバイスによって制御可能である。
【0038】
図3は、例えばユーザのワークステーションなどのクライアントコンピュータシステムとして、システムのアーキテクチャの例を示す。
【0039】
クライアントコンピュータは、内部通信BUS1000に接続された中央処理ユニット(CPU)1010と、同じくBUSに接続されたランダムアクセスメモリ(RAM)1070とを備える。クライアントコンピュータには、BUSに接続されたビデオランダムアクセスメモリ1100に関連付けられたグラフィクス処理ユニット(GPU)1110がさらに提供される。ビデオRAM1100は、当分野ではフレームバッファとも呼ばれる。大容量記憶デバイスコントローラ1020は、ハードドライブ1030などの大容量メモリデバイスへのアクセスを管理する。コンピュータプログラムの命令およびデータを有形に具体化するために好適な大容量メモリデバイスは、例えば、EPROM、EEPROM、およびフラッシュメモリデバイスなどの半導体メモリデバイスと、内部ハードディスクおよび取り外し可能ディスクなどの磁気ディスクと、光磁気ディスクと、CD−ROMディスク1040とを含む、すべての形の不揮発性メモリを含む。前述のいずれかは、特別に設計されたASIC(特定用途向け集積回路)によって補助されるか、またはこれに組み込まれることが可能である。ネットワークアダプタ1050は、ネットワーク1060へのアクセスを管理する。クライアントコンピュータは、カーソル制御デバイス、キーボードなどの、触覚デバイス1090を含むこともできる。カーソル制御デバイスは、図2を参照しながら述べたように、ユーザがカーソルをディスプレイ1080上の任意の所望な位置に選択的に配置できるようにするために、クライアントコンピュータ内で使用される。画面により、コンピュータモニタなど、表示を実施することができる任意のサポートを意味している。加えてカーソル制御デバイスは、ユーザが様々なコマンドを入力し、制御信号を入力できるようにするものである。カーソル制御デバイスは、システムに制御信号を入力するためのいくつかの信号生成デバイスを含む。典型的には、カーソル制御デバイスはマウスとすることが可能であり、マウスのボタンは信号を生成するために使用される。
【0040】
システムに方法を実行させるために、コンピュータによる実行のための命令を含むコンピュータプログラムが提供され、命令はこの目的のための手段を含む。プログラムは、例えば、デジタル電子回路内、もしくはコンピュータハードウェア、ファームウェア、ソフトウェア内、またはそれらの組み合わせ内に実装可能である。本発明の装置は、プログラム可能プロセッサによる実行のためにマシン読み取り可能記憶デバイス内に有形に具体化された、コンピュータプログラム製品内に実装可能であり、本発明の方法ステップは、入力データに対する演算および出力の生成によって本発明の機能を実行するために命令のプログラムを実行する、プログラム可能プロセッサによって実施することができる。命令は、データ記憶システム、少なくとも1つの入力デバイス、および少なくとも1つの出力デバイスから、データおよび命令を受信するため、ならびにそれらへデータおよび命令を送信するために結合された、少なくとも1つのプログラム可能プロセッサを含むプログラム可能システム上で実行可能な、1つまたは複数のコンピュータプログラム内に有利に実装可能である。アプリケーションプログラムは、高水準手続き型プログラミング言語もしくはオブジェクト指向プログラミング言語で、または、所望であればアセンブリ言語もしくは機械言語で実装可能であり、いずれの場合も、言語はコンパイル済み言語または解釈済み言語とすることができる。プログラムは、完全インストールプログラムまたは更新プログラムとすることができる。後者の場合、プログラムは既存のCADシステムを、システムが方法の実行に好適な状態に更新する。
【0041】
方法は、工作物および切削ツールの軌道を表すモデル化されたボリュームを提供すること(S10)を含む。モデル化されたボリュームは、任意のボリュームモデリングを使用して提供可能である。例えば、モデル化されたボリュームは、代数的定式化として提供可能である。あるいは、モデル化されたボリュームは、B−Rep(境界表現、すなわちモデル化されたボリュームの境界面に関する定式化)として、または多面体として提供可能である。モデル化されたボリュームは、以下で論じるように、デクセルのセットとしても提供可能である。モデル化されたボリューム、例えば3Dの表現は、方法の間、常時ユーザに表示することも可能である。切削ツールの軌道は、工作物の機械加工時に切削ツールによって取られることになる位置の任意の順序付けされたセットである。切削ツールの表現、例えば3Dを、ユーザに表示することも可能である。軌道の提供は、ユーザによって、例えば工作物の切削をシミュレートするために表示されたモデル化されたボリューム方向に切削ツールを移動させるなど、例えば画面上の切削ツールの表現を処理するユーザによって実施することができる。この方法は、切削ツールの軌道に従ってモデル化されたボリュームを更新することができる。例えばこの方法は、モデル化されたボリューム上で切削を実行すること、ならびに、その一方でまたは事前に、例えばリアルタイムで、例えば衝突が検出された場合に切削を停止するように、決定(S20)およびテスト(S30)を実行することを、含むことができる。このような場合、方法は、衝突が検出された旨の情報をユーザに表示することを含むことができる。
【0042】
方法は、切削ツールの衝突掃引を決定すること(S20)も含むことができる。衝突掃引は、切削ツールが軌道をたどる場合に、切削ツールの非切削前部によって掃引されるボリュームを表すデータである。一般に、切削ツールは切削部および非切削部を有し、これらはそれぞれ「切削ボリューム」および「非切削ボリューム」と呼ばれることもある。切削部と非切削部との間の境界は可変である可能性があり、すなわち異なる境界が存在可能であるため、それにより、場合によっては切削ツールの切削部および非切削部からなる異なるペアを定義する。切削ツールは、フライス盤、ボール盤、さらにはナイフとすることができる。いずれの場合でも、切削ツールは、例えば作業者またはロボットによって切削ツールを例えば処理および移動させるための、非切削部(例えばハンドル)を有する。実際に、切削ツールは、切削部および非切削部の剛性アセンブリである。ツールの軌道は、例えばユーザによって定義される一連の位置である。非切削部は、材料を切削しない切削ツールの一部であるため、遭遇する任意の固体と衝突する。切削ツールが軌道をたどる場合、切削ツールの非切削前部は、軌道上の切削ツールの所与の位置での、切削ツールが軌道をたどる場合にそうした位置で固体に衝突することになる(切削ツールが軌道をたどり始める前に固体がそうした位置に配置されている場合)ような、切削ツールのポイントのサブセットである。非切削前部の正式な定式化は、後で提供される。非切削前部によって掃引されるボリュームは、(例えば、工作物の少なくとも一部がこうした掃引されるボリューム内にある場合)潜在的な衝突が存在するボリュームである。衝突掃引は、こうしたボリューム(場合によっては掃引されるボリュームそれ自体またはその近似)を表す任意のボリュームデータである。これによって方法は、軌道の機能において切削ツールのポイントの衝突位置を表す3D空間のボリュームを決定することができる。
【0043】
この方法は、決定(S20)ステップに従って(すなわち、決定された衝突掃引の機能において)、工作物との衝突をテストすること(S30)をさらに含む。テストすること(S30)は、衝突を検出した場合(潜在的な衝突の場合)に肯定的な結果を引き出すこと、またはその逆の場合に否定的な結果を引き出すことができる。例えば、テストすること(S30)は、衝突掃引と工作物との間に交差が存在するかどうかを決定することを含むことができる。したがってこの方法は、衝突掃引(によって表されるボリューム)が工作物と交差するか否かを決定することができる。交差する場合、方法によって衝突が検出される。
【0044】
この方法のコンテキストは、コンピュータ支援システムまたはコンピュータ支援製造システムを使用するリアルタイムの機械加工シミュレーションである。この方法は、切削部および非切削部を有する切削ツールによって工作物を機械加工する、信頼できるシミュレーションを提供する。実際に、この方法は、わずかな偽の否定的結果を伴い(すなわち、わずかな可能な衝突がテスト(S30)によって見逃されて)、高速に衝突を検出する。これは衝突掃引を決定する(S20)際に、切削ツールの軌道が考慮されるためである。
【0045】
決定すること(S20)は、軌道を基本ステップに区分することを含むことができる。このような場合、決定すること(S20)およびテストすること(S30)は、各基本ステップに対して実施することができる。これにより、衝突掃引が容易に決定されるように、高速テスト(S30)が可能となる。また、これによって、テスト(S30)の偽の肯定的な結果を有する機会も減少する。ツール軌道の基本ステップは、2つの連続する位置の間でのツールの動きとすることができる。ツール軌道の各基本ステップで、切削部によって保護された非切削可動部の表面によって掃引されるボリュームを、非切削部によって掃引されるボリュームから差し引くことができる。その結果が現行の工作物と交差していない場合、この基本的な動きではクラッシュ(すなわち衝突)が発生しない旨を決定することができる。このチェックの後、(基本的な動きに従ってモデル化されたボリュームの一部を切削することにより)現行の工作物を更新することができる。これにより、速度の向上および信頼性の向上の両方が得られる。実際に、この方法は、それぞれの基本軌道ステップを改善する(したがって良好な性能を可能にする)必要はなく、信頼性はいずれの数値精度値にも依存しない。性能および信頼性は、変位ベクトルの方向に依存しない。
【0046】
この区分は、所定の時間ステップに依存することができる。例えばこの方法は、それぞれが所定の時間ステップ中のユーザによる切削ツールの表現の処理に対応する、基本ステップに、軌道を区分することが可能である。あるいはこの方法は、所定の長さの基本ステップに軌道を区分することが可能である。あるいはこの方法は、等しい長さの所定数の基本ステップに軌道を区分することが可能である。
【0047】
あるいはこの方法は、それぞれが規則正しい軌道を定義する基本ステップに軌道を区分することが可能である。規則正しい軌道により、切削ツールの各所与のポイントについて、所与のポイントの一連の位置によって定義される曲線は(切削ツールが軌道をたどる場合)、尖点を有さない(すなわち特異点を有さない)。例えば基本ステップは、彫刻ツールのキネマティックの記述のための、線形、円形、らせん形の弧(すなわちコイル部分)または曲線とすることができる。こうした区分が、テストステップ(S3)での偽の肯定の回数を効率的に低減させる。
【0048】
切削ツールは、切削と何らかの他の非切削との何らかの境界を伴う凸状の面とすることができる。これにより、テスト(S30)のより信頼できる結果が保証される。
【0049】
この方法は、工作物を更新する間の、ツールの切削部の動きとツールの非切削部の動きとを分離する。これは、方法の適用例を示す図4〜6を参照しながら例示される。
【0050】
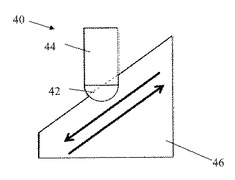
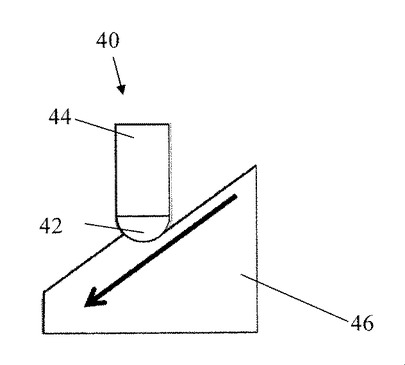
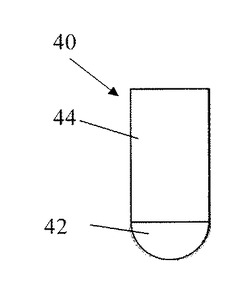
この例では、方法は、切削部42および非切削部44を備える切削ツール40、ならびに工作物を表すモデル化されたボリューム46を、ユーザに表示することを含む。図4では、モデル化されたボリューム46は更新前の工作物を表す。図5〜6では、モデル化されたボリューム46は更新後の工作物を表す。
【0051】
切削部42はツール40の半球部分であり、非切削部44はツール40の円柱部分(例えばツール胴部)である。切削ステップ前の工作物は、図4の台形形状のボリューム46である。
【0052】
ツール40が右上から左下へと降下している場合、図5に示されるように切削前部はツール胴部に先行するため、(実際の機械加工プロセスにおいて)衝突は発生しないことが観察できる。これに対して、左下から右上へと上昇すると、図6に示されるようにツール胴部が切削前部に先行するため、(実際の機械加工において)ツール胴部44と工作物との間に衝突48が生じる。
【0053】
したがって方法は、この非対称的な挙動を予測するために設計され、図6の場合では衝突を効率的に検出するが、図5の場合では衝突を効率的に検出しない。さらにこのような場合、軌道は単一の基本ステップを含むことができる。したがって方法は、軌道全体に対してテスト(S30)を高速に実行することができる。
【0054】
次に、図7〜21を参照しながら、この方法の例について論じる。これらの例は、図4〜6を参照しながら論じた例と組み合わせ可能である。
【0055】
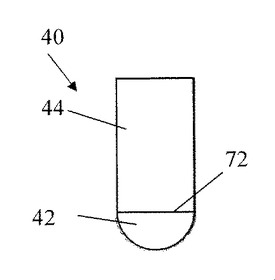
可動の切削ツール40は、切削ボリューム42および非切削ボリューム44に分解される。切削ボリューム42および非切削ボリューム44によって共有される内部境界72は、実際的な意義を有さず、材料の除去または衝突挙動に影響を与えないことに留意されたい。したがって、この境界72表面は計算の便宜上選択され、任意に設定可能である。この例では、境界72は便宜的にディスクとして選択される。
【0056】
第1の例では、衝突掃引を決定することは、切削ツール40が軌道をたどる場合、切削ツール40の非切削前部によって掃引されるボリュームを決定することを含む。言い換えれば、この方法は、切削ツール40が軌道をたどる場合、切削ツール40の非切削前部によって掃引されるボリュームを実際に決定し、衝突掃引はこうして決定されたボリュームに等しいことが可能である。
【0057】
この例では、ツール40は、切削ボリューム42および非切削ボリューム44を含む剛性可動アセンブリである。Vを非切削ボリューム44の値としてみる。本来の手法では、工作物と掃引されるボリュームVとの交差を考慮することができる。軌道を、関数t∈[0,1]→Traj(t)によって定義し、この式で、各t∈[0,1]について、Traj(t)は等長変換であるとすると、掃引されるボリュームVは、
【0058】
【数1】

【0059】
である。
【0060】
各t∈[0,1]で、等長変換Traj(t)は回転Rot(t)および変換Trans(t)によって定義され、これは、3次元空間のポイントxが位置Traj(t)(x)=Rot(t)x+Trans(t)で移動されることを意味する。
【0061】
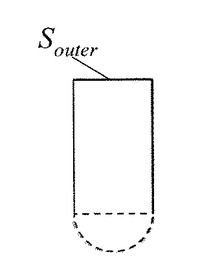
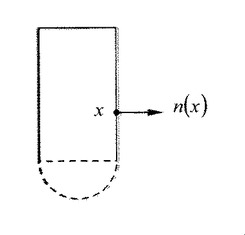
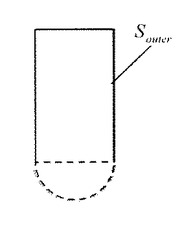
この方法は、本来の掃引されるボリュームの概念の代わりに、いわゆる前進する外側前部の合併を使用することによって、より高度な定義を考慮する。Souterを、ツール参照で定義された、ツール40の外側境界でもある切削ボリューム42の境界とする。図7の例では、ツールは切削ボリューム42および非切削ボリューム44に分解される。図8は、対応するSouterを実線(非破線)として示している。任意のポイントx∈Souterで、図9に示されるように、外側法線ベクトルn(x)が示される。
【0062】
所与のt∈[0,1]について、Front(t)で示されるツール40の非切削前部を、以下のように定義されるSouterのサブセットとする。
【0063】
【数2】
【0064】
上式で、<u,v>はベクトルuとvとの間のスカラ積を示し、Rot(t)は軌道Traj(t)の回転構成要素である。言い換えれば、Front(t)はSouterのポイントのセットであり、時間tでのその瞬間速度ベクトルは可動のツール40の外部方向に配向される。
【0065】
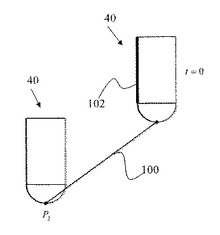
例えば、図10に示されるように、ツール40は、ポイントP1からポイントP2へと線セグメント100に沿って移動可能である。したがって、すべてのtについてRot(t)=Idであるため、Traj(t)x=x+t(P2−P1)である。そこで、すべてのtについて、
【0066】
【数3】
【0067】
である。したがってt=0では、Front(t)は図10で太線によって示される垂直セグメント102である。
【0068】
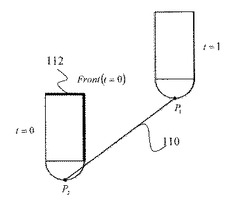
P2からP1への逆軌道110は、図11で逆L字形太線112によって示されるような、異なるFront(t=0)を誘導する。
【0069】
この方法は、「衝突掃引」をFront(t)によって掃引されるボリュームとして、以下のように決定すること(S20)ができる。
【0070】
【数4】
【0071】
この方法は、現行の工作物に照らして非切削ボリューム掃引をチェックすることとは対照的に、現行の工作物に照らして衝突掃引をチェックする。
【0072】
図12は、下降する軌道に従って計算された衝突掃引120を示す。明らかに、衝突掃引120およびモデル化されたボリューム46は分離され、これは、ツール40の非切削ボリュームが、軌道のこの部分の間に、モデル化されたボリューム46にクラッシュしないことを意味する。
【0073】
次に、図13は、上昇する軌道に従った衝突掃引120を示す。Front(t=0)の形状により、衝突掃引120は異なり、ボリューム46と重複する。これは、ツール40の非切削ボリューム44が、軌道のこの部分の間に、モデル化されたボリューム46に実際にクラッシュすることを意味する。
【0074】
第2の例では、この方法は、切削ツールの保護前部を決定することを含む。切削ツールの保護前部は、切削ツールが軌道をたどる場合、軌道上の切削ツールの所与の位置での切削ツールのポイントのサブセットであり、切削ツールが軌道をたどる場合、切削ツールの他のポイントがそうした位置にある固体と衝突するのを防ぐ(切削ツールが軌道をたどり始める前に固体がそうした位置に配置されている場合)。保護前部の正式な定式化は、後で提供される。
【0075】
衝突掃引を決定すること(S20)は、このような場合、非切削部によって掃引されるボリュームおよび保護前部によって掃引されるボリュームを決定することを含むことができる。その後、この方法は、当該2つのボリューム間の相違を決定することができる。テストすること(S30)は、当該ボリュームの相違がモデル化されたボリュームと交差するかどうかを評価することを含むことが可能であり、交差する場合は肯定結果を引き出し、交差しない場合は否定結果を引き出す。これにより、高速でロバストな決定(S20)が可能である。
【0076】
便宜上、例は2Dで示されている。しかしながら実際は、前述のように3次元である。図14〜15は、例の3D図を提供する。図14は、非切削ボリューム44を(長方形ではなく)円柱形として示している。図15は、衝突掃引120が、傾斜軌道に沿って半円柱形フランクによって掃引されるボリュームであり、凸面体でないことを示している。
【0077】
この第2の例ならびに第1の例では、方法の実装はマルチデクセルモデルとすることができる。言い換えれば、工作物は(それによってモデル化されたボリュームを表す)デクセルのセットによって表すことができる。言い換えれば、この例では、モデル化されたボリュームはデクセルのセットとして提供される。(デクセルのセットの)各デクセルは、少なくとも1つのセグメントのセットを備える。こうしたセグメントは、線と工作物との間の交差を表す。
【0078】
工作物を表すためにデクセルのセットを使用することで、(少ないメモリスペースを使用する)軽量表現が可能となる。これにより、容易に処理可能な工作物の表現も可能となる。特に、デクセルのセットのデータ構造により、工作物がデクセルのセットによって表される場合、切削は特に効率的に実行することができる。実際に、設計動作は高反応性および高ロバストネスで実施することができる。特に、デクセルのセットに対する演算は、効率が増大するように、並列処理を介して線ごとに実施することができる。したがって、システムのプロセッサはGPUとすることができることが効率的である。
【0079】
「デクセル」という用語は、「深さ要素」のショートカットであるものと知られている(「ピクセル」という用語が「画像要素」のショートカットであるのと同様)。デクセルの概念は、数多くの研究論文で言及されている。この方法との関連において、デクセルは少なくとも1つのセグメントのセット、すなわち3Dポイントのペアを含む。ある例では、モデル化されたボリュームは、少なくとも2つのセグメントのセットを含む少なくとも1つのデクセルを含む(例えば、デクセルの初期セットおよび/またはデクセルの新規セットは少なくとも2つのセグメントを含む)。デクセルのセグメントは、いくつかある場合、順序付けする(このような場合、デクセルはリストである)か、または順序付けしないことが可能である。デクセルのセグメントは、線と工作物との間の交差を表す。言い換えれば、仮想線が工作物と交差するものと考えると、デクセルは所与の線から始まるセグメントのセットであり、交差の計算の結果から生じる。
【0080】
デクセルのセットは、コンピュータ実施データとして提供されることに留意されたい。したがって、モデル化されたボリュームの任意の表現に関して上記および下記で提供される定義は、図のデータ構造ポイントからの影響を受ける。例えば、セグメントは3D位置のペア(例えば互いにリンクされた2つの3D位置)として提供可能である。3D位置は、それ自体、参照3Dフレームに関連付けられた3つの座標(例えば浮動小数点)のリストとして提供可能である。デクセルは、セグメントがセット構造において互いにリンクされていることを示唆する、セグメントのセットである。デクセルのセットのデクセルも、同様に互いにリンクされることが可能である。モデル化されたボリュームを、それら自体が少なくとも1つのセグメントのセットを有するデクセルのセットによって表すことにより、モデル化されたボリュームの高速テスト(S30)ならびに高速の隠された更新が可能となる。
【0081】
衝突をテストすること(S30)は、それぞれのデクセルについて、保護前部によって掃引されるボリュームと交差するそれぞれのデクセルのセグメントを決定すること、それに応じて(すなわち、決定されたセグメントの機能において、すなわち決定されたデクセルを短縮および/または廃棄することによって)それぞれのデクセルを更新すること、ならびに、更新されたそれぞれのデクセルのセグメントが非切削部によって掃引されるボリュームと交差するかどうかを評価することを、含むことができる。その後、方法は、評価が肯定である場合はテストの肯定結果を、または評価が否定である場合は否定結果を、引き出すことができる。
【0082】
この方法は、保護前部および非切削部を定義する(例えば、前述のように、保護前部は任意で定義可能であり、切削ツールを切削部と非切削部に分割することができる)ことを含むことができるため、結果として、保護前部によって掃引されるボリュームおよび非切削部によって掃引されるボリュームは凸状の面となる。当業者であれば、こうした分割を実行してどのように凸面部を取得するかについて理解されよう。このような場合、保護前部によって掃引されるボリュームと交差するそれぞれのデクセルのセグメントを決定すること、および、更新されたそれぞれのデクセルのセグメントが非切削部によって掃引されるボリュームと交差するかどうかを評価することが、特に高速に実行される。
【0083】
実際に、それぞれのデクセルのセグメントは、典型的に順序付けすることができる(実際の順序は、デクセルを定義するデータ内に存在可能であるか、またはこうした順序を本来存在するままに取り出すことができる)。非切削部は、例えば、非切削部が凸状の面であり、基本ステップが単純変換である場合、凸面ボリュームを掃引することができる。加えて、保護前部も同様に凸面ボリュームを掃引することができる。例えば、切削部も同様に凸状の面とすることができる。軌道は、単純変換からなる基本ステップに分割することができる。それぞれのデクセルを更新することは、保護前部によって掃引されるボリュームと交差する最小順番のセグメント(例えば、それぞれのデクセルのセグメントの順序で進められる場合、保護前部によって掃引されるボリュームと交差する第1のセグメント)を短縮すること、保護前部によって掃引されるボリュームと交差する最大順番のセグメント(例えば、それぞれのデクセルのセグメントの順序で進められる場合、保護前部によって掃引されるボリュームと交差する最後のセグメント)を短縮すること、および、最小順番のセグメントと最大順番のセグメントとの間のすべてのセグメントを除去することを含む。
【0084】
次に、この方法の第2の例について、図16〜21を参照しながら論じる。
【0085】
デクセルの使用との関連において、処理ポイントの観点から、凸面衝突掃引を管理すること、または不可能な場合、2つの凸面セットの減算によって定義された固体を管理することが、より効率的である可能性がある。実際に、2つの凸面セットの相違のセットS、S=C1−C2とセグメントとの交差は、以下のように実施することができる。
【0086】
この方法は、C1およびC2を備えるセグメントをサポートする線Lと交差することが可能であり、これによって、2つの可能な空のセグメントI1=L∩C1およびI2=L∩C2が与えられる。L∩S=L∩(C1−C2)=(L∩C1)−(L∩C2)=I1−I2であることが観察できる。もちろん、線Lによってサポートされるセグメントは、Lのパラメータ表示内の間隔として表すことができる。Sと共にLによってサポートされるセグメントの交差は、2つの間隔の相違を伴う間隔の交差にまとめられ、後者は、最悪の場合、2つの間隔の合併である。
【0087】
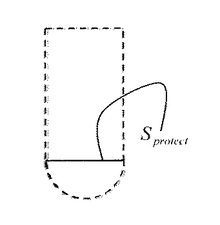
このため、以前に提示された第1の例は、特にデクセルモデルとの関連において、この方法をより実際的にするために再公式化することができる。凸面の非切削ボリュームVについて考えてみる。発明者等は、Souter内にないVの境界をSprotectと呼ぶ。言い換えれば、Sprotectは、ツールの他の切削ボリュームまたは非切削ボリュームと接触しているVの面を含む。
【0088】
NC機械加工シミュレーションなどの実際的な状況において、最も一般的なツールの形状は、Sprotectが1つまたは複数の平面を含むことを可能にする。しかしながら、切削ボリュームと非切削ボリュームとの間の内部分離に物理的な意義はなく、したがって、結果として生じる挙動にいかなる影響も無しに、平面としてしばしば選択される可能性があることに留意されたい。
【0089】
図4〜15の例の場合、Sprotectはディスクとすることができる。図16〜18に示されるように、Sprotectは切削ボリュームと非切削ボリュームとを分離する実線である。
【0090】
この方法は、衝突掃引を、全凸面非切削ボリュームの掃引とSprotectのサブセットの掃引との間の設定された理論上の相違として定義することができる。このサブセットは、外側法線ポイントが掃引方向にある、Sprotectのすべてのポイントを含む。一般的な非変換軌道の場合、Sprotectのある部分は、即時掃引速度方向に向かう外側法線ポイントを有し、ある部分は有さないことが可能である。この場合、Sprotectのサブセットのみを掃引することができる。変換掃引の場合、これは2つの凸面セットの減算であり、マルチデクセルモデルにおいて容易に管理可能である。
【0091】
正式には、この方法は以下のように定義可能である。
【0092】
【数5】
【0093】
したがって、衝突掃引の以前の定義に従い、以下の式が得られる。
【0094】
【数6】
【0095】
したがって、マルチデクセルグリッド表現を使用する機械加工シミュレーションとの関連において、この方法は、以下の動作によって基本軌道中の衝突を容易にチェックすることができる。
【0096】
各デクセルについて、この方法は、図19に示されたように、非切削ボリューム190の掃引との交差によって与えられる、間隔Ai(すなわち、この例のデクセルのサポート線上の間隔として格納されたデクセルのセグメント)を計算することができる。これらの間隔Aiのすべてが現行の工作物との空の交差を有する場合、衝突が生じないことを保証することが可能であり、すなわち、テストすること(S30)は否定結果を引き出すことができる。
【0097】
さもなければ、この方法は、t=0からt=1までprotectFrontによって掃引されるボリュームを計算することができる(軌道、または基本ステップが、0から1へ進むパラメータ化で定義される場合)。この場合、方法は、その外側法線が変位ベクトルを用いる正のドット積を有する、Sprotectの面200を集めることができる。その後、この方法は、図20に示されるように、これらの面200によって掃引されるボリュームを計算することができる。この方法は、最終的に、図20に示されるように、デクセルとこの掃引されるボリューム202との間の交差に等しい間隔Biを計算することができる。この方法は、ブール1次元減算C1=Ai−Biを計算することが可能であり、この結果として生じる間隔は、図21に示されるように、デクセルと衝突掃引ボリューム190との間の交差を表す。これらのC1間隔が工作物層を格納するデクセル間隔との空でない交差を有する場合、そのデクセル上で衝突が生じることになるものと結論付けることができる。衝突深さも推測可能である。さもなければ、図21に示されるように、そのデクセル上に衝突は発生しない。
【符号の説明】
【0098】
40 切削ツール
42 切削ボリューム
44、190 非切削ボリューム
46、202 ボリューム
48 衝突
72 内部境界
100 線セグメント
102 垂直セグメント
110 逆軌道
112 逆L字形太線
120 衝突掃引
200 面
1000 内部通信BUS
1010 CPU
1020 大容量記憶デバイスコントローラ
1030 ハードドライブ
1040 CDROM
1050 ネットワークアダプタ
1060 ネットワーク
1070 RAM
1080 ディスプレイ
1090 触覚デバイス
1100 ビデオRAM
1110 GPU
2000 物体
2060 カーソル
2070、2080、2130 グラフィックツール
2100 GUI
2110、2120 標準メニューバー
2140、2150 ツールバー
【技術分野】
【0001】
本発明は、コンピュータプログラムおよびシステムの分野に関し、より詳細には、切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための方法、システム、およびプログラムに関する。
【背景技術】
【0002】
物体の設計、エンジニアリング、および製造に関する市場には、いくつかのシステムおよびプログラムが提供されている。CADはコンピュータ支援設計の頭字語であり、例えば物体を設計するためのソフトウェアソリューションに関する。CAEはコンピュータ支援エンジニアリングの頭字語であり、例えば将来の製品の物理的挙動をシミュレートするためのソフトウェアソリューションに関する。CAMはコンピュータ支援製造の頭字語であり、例えば製造のプロセスおよび動作を定義するためのソフトウェアソリューションに関する。こうしたシステムにおいて、技法の効率に関しては、グラフィカルユーザインターフェース(GUI)が重要な役割を果たす。これらの技法は、製品ライフサイクル管理(PLM)システム内に埋め込むことが可能である。PLMは、拡張された企業の概念全体にわたって、企業が製品データを共有し、共通のプロセスを適用し、製品の出現から寿命の終了まで製品の開発に関する企業知識を活用するための一助となる、ビジネス戦略を指す。
【0003】
Dassault Systemsによって(商標CATIA、ENOVIA、およびDELMIAで)提供されるPLMソリューションは、製品エンジニアリング知識を組織化するエンジニアリングハブ、製造エンジニアリング知識を管理する製造ハブ、ならびに、エンジニアリングハブおよび製造ハブの両方への企業の統合および接続を可能にする企業ハブを提供する。すべてが一緒になって、システムは、動的な知識ベースの製品創出および意思決定支援を可能にするように製品、プロセス、リソースをリンクし、最適化された製品の定義、製造準備、生産、およびサービスを推進するオープンオブジェクトモデルをもたらす。
【0004】
これらのシステムのいくつかは、切削ツールによる工作物の機械加工のシミュレーションを可能にする。しかしながら、これらのシステムはしばしば不十分なシミュレーションの原因となる。
【0005】
こうしたシステムの例が、論文(例えば、非特許文献1および非特許文献2を参照)に記載されている。
【0006】
いくつかのシステムは、デクセルのセットを用いたモデル化されたボリュームの表現を可能にする。いくつかの文書では、機械加工シミュレーションまたは対話型彫刻に関してデクセル表現を使用することを特に提案している。
【0007】
こうした文書の例(例えば、非特許文献3、非特許文献4、非特許文献5、非特許文献6、非特許文献7、非特許文献8、非特許文献9、特許文献1、および特許文献2を参照)がある。
【0008】
GPGPU(General−Purpose computing on Graphics Processing Units)は、従来は中央処理ユニット(CPU)によって処理されるアプリケーション内の計算を実行するために、通常はコンピュータグラフィック専用の計算を処理するグラフィック処理ユニット(GPU)を使用する技法である。いくつかの論文では、デクセル表現に関して現在のグラフィック処理ユニット(GPU)の計算能力を使用することについて考察している。これらの論文は、特定のメモリモデルに関連付けられたLDNI(Layered Depth−Normal Images)アルゴリズムを使用している。
【0009】
こうした論文の例(例えば、非特許文献10および非特許文献11を参照)がある。
【0010】
これに関連して、切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための改良されたソリューションが、依然として求められている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】米国特許第5710709号明細書
【特許文献2】米国特許第7747418号明細書
【非特許文献】
【0012】
【非特許文献1】"Precise global collision detection in multi-axis NC-machining", Oleg Ilushina, Gershon Elberb, Dan Halperin, Ron Wein, Myung-Soo Kim, Computer-Aided Design 37 (2005) 909 - 920
【非特許文献2】"The sweep plane algorithm for global collision detection with workpiece geometry update for five-axis NC machining", T.D. Tang, Erik I., J. Bohez, Pisut Koomsap, Computer-Aided Design 39 (2007) 1012 - 1024
【非特許文献3】"A Virtual Sculpting System Based on Triple Dexel Models with Haptics", Xiaobo Peng and Weihan Zhang, Computer-Aided Design and Applications, 2009
【非特許文献4】"NC Milling Error Assessment and Tool Path Correction", Yunching Huang and James H. Oliver, Proceedings of the 21st annual conference on Computer graphics and interactive techniques, 1994
【非特許文献5】"NC milling simulation and dimensional verification via dexel representation", Oliver, J.H, and Huang, Y., US Patent 5,710,709 - 1998
【非特許文献6】"Online Sculpting and Visualization of Multi-Dexel Volumes", Heinrich Muller, Tobias Surmann, Marc Stautner, Frank Albersmann, Klaus Weinert, SM '03 Proceedings of the eighth ACM symposium on Solid modeling and applications
【非特許文献7】"Virtual prototyping and manufacturing planning by using tri-dexel models and haptic force feedback", Yongfu Ren, Susana K. Lai-Yuen and Yuan-Shin Lee, Virtual and Physical Prototyping, 2006
【非特許文献8】"Simulation of NC machining based on the dexel model: A critical analysis", Sabine Stiffer, The International Journal of Advanced Manufacturing Technology, 1995
【非特許文献9】"Real time simulation and visualization of NC milling processes for inhomogeneous materials on low-end graphics hardware", Konig, A.N. and Groller, E., Computer Graphics International, 1998. Proceedings
【非特許文献10】"GPGPU-based Material Removal Simulation and Cutting Force Estimation", B. Tukora and T. Szalay, CCP: 94: Proceedings Of The Seventh International Conference On Engineering Computational Technology
【非特許文献11】"Layered Depth-Normal Images: a Sparse Implicit Representation of Solid Models", Charlie C. L. Wang and Yong Chen, Proceedings of ASME international design engineering technical conferences. Brooklyn (NY)
【発明の概要】
【発明が解決しようとする課題】
【0013】
したがって、一態様によれば、切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための、コンピュータ実施方法が提供される。この方法は、工作物および切削ツールの軌道を表すモデル化されたボリュームを提供することを含む。この方法は、切削ツールの衝突掃引を決定することも含む。衝突掃引とは、切削ツールが軌道をたどる場合に、切削ツールの非切削前部によって掃引されるボリュームを表す。この方法は、決定ステップに従って工作物との衝突をテストすることも含む。
【課題を解決するための手段】
【0014】
この方法は、以下のうちの1つまたは複数を含むことができる。
【0015】
− この方法は、切削ツールの保護前部(protective front)を決定することを含み、衝突掃引を決定することは、非切削部によって掃引されるボリュームおよび保護前部によって掃引されるボリュームを決定することを含む。
【0016】
− 工作物はデクセルのセットによって表され、各デクセルは線と工作物との間の交差を表す少なくとも1つのセグメントのセットを含み、衝突をテストすることは、それぞれのデクセルについて、保護前部によって掃引されるボリュームと交差するそれぞれのデクセルのセグメントを決定すること、それに応じてそれぞれのデクセルを更新すること、および、更新されたそれぞれのデクセルのセグメントが非切削部によって掃引されるボリュームと交差するかどうかを評価することを含む。
【0017】
− 切削部は凸状であり、それぞれのデクセルのセグメントは順序付けられ、それぞれのデクセルを更新することは、保護前部によって掃引されるボリュームと交差する最小順番のセグメントを短縮すること、保護前部によって掃引されるボリュームと交差する最大順番のセグメントを短縮すること、および、最小順番のセグメントと最大順番のセグメントとの間のすべてのセグメントを除去することを含む。
【0018】
− 衝突掃引を決定することは、切削ツールが軌道をたどる場合、切削ツールの非切削前部によって掃引されるボリュームを決定することを含む。
【0019】
CAMシステムは、上記方法を実行するための命令が記録されているメモリと、メモリに結合されたプロセッサと、プロセッサに結合され、命令を実行するように好適な、少なくとも1つのグラフィカルユーザインターフェースとを備えることが、さらに提案される。
【0020】
プロセッサは、GPU(グラフィック処理ユニット)であってよい。
【0021】
上記方法を実行するための命令を含むコンピュータプログラムが、さらに提案される。
【0022】
上記コンピュータプログラムが記録されているコンピュータ読み取り可能記憶媒体が、さらに提案される。
【図面の簡単な説明】
【0023】
次に、本発明の実施形態について、非限定的な例を用いて添付の図面を参照しながら説明する。
【0024】
【図1】本発明の方法の例を示す流れ図である。
【図2】本発明のグラフィカルユーザインターフェースの例を示す図である。
【図3】本発明のクライアントコンピュータシステムの例を示す図である。
【図4】本発明の方法の例を示す図である。
【図5】本発明の方法の例を示す図である。
【図6】本発明の方法の例を示す図である。
【図7】本発明の方法の例を示す図である。
【図8】本発明の方法の例を示す図である。
【図9】本発明の方法の例を示す図である。
【図10】本発明の方法の例を示す図である。
【図11】本発明の方法の例を示す図である。
【図12】本発明の方法の例を示す図である。
【図13】本発明の方法の例を示す図である。
【図14】本発明の方法の例を示す図である。
【図15】本発明の方法の例を示す図である。
【図16】本発明の方法の例を示す図である。
【図17】本発明の方法の例を示す図である。
【図18】本発明の方法の例を示す図である。
【図19】本発明の方法の例を示す図である。
【図20】本発明の方法の例を示す図である。
【図21】本発明の方法の例を示す図である。
【発明を実施するための形態】
【0025】
図1は、切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための、コンピュータ実施方法の例の流れ図を示す。この方法は、工作物および切削ツールの軌道を表すモデル化されたボリュームを提供すること(S10)を含む。この方法は、切削ツールの衝突掃引を決定すること(S20)も含む。衝突掃引とは、切削ツールが軌道をたどる場合に、切削ツールの非切削前部によって掃引されるボリュームを表す。この方法は、決定することに従って工作物との衝突をテストすること(S30)をさらに含む。こうした方法によって、切削ツールによる工作物の機械加工のシミュレーションが向上する。
【0026】
この方法は、製造物体を表すCADモデル化物体を設計するプロセスを含むことができる。製造物体は、任意の物理的製品とすることが可能であり、工作物上で実行される機械加工プロセスに従って製造することが可能である。例えば製造物体は、切削ツールによりストックを機械加工することによって取得可能である。工作物は、機械加工中静止しているようなストックからなる。この方法は、こうした機械加工をシミュレートする。
【0027】
「CADモデル化物体を設計すること」は、モデル化された物体を精密に作り上げるプロセスの少なくとも一部である、任意のアクションまたは一連のアクションを指定する。例えばこの方法は、工作物を表すモデル化されたボリュームをストックとして提供すること、および、モデル化されたボリュームの切削をシミュレートすること(したがってストックの切削をシミュレートすること)によって工作物の機械加工をシミュレートすることを、含むことができる。モデル化されたボリュームは、工作物によって占有される3D空間を定義する。したがって、モデル化されたボリュームはモデル化された立体である。この方法は、切削部および非切削部を有する切削ツールによる工作物の機械加工のシミュレーションを向上させるものであるため、この方法は、製造物体を表すCADモデル化物体の設計も向上させる。
【0028】
モデル化された物体とは、コンピュータシステムのメモリ内に格納されたデータによって定義される任意の物体である。拡大解釈すれば、「モデル化された物体」という表現は、データ自体を指定する。CADモデル化物体とは、CADシステムのメモリ内に格納されたデータによって定義される任意の物体である。システムのタイプにより、モデル化された物体は異なる種類のデータによって定義することができる。CADシステムとは、CATIAなどの、モデル化された物体のグラフィック表現に基づいてモデル化された物体を設計するために少なくとも好適な、任意のシステムである。したがって、CADモデル化物体を定義するデータは、モデル化された物体の表現を可能にするデータ(例えば、例えば空間内の相対的位置を含む、幾何学データ)を含む。
【0029】
この方法は、方法の実行後、方法によってシミュレートされた機械加工プロセスに従って製造物体を生産することを含むことが可能な、製造プロセスに含まれることが可能である。言い換えれば、テスト(S30)の後、例えば、テスト(S30)によって衝突がない旨の結果が引き出された場合、方法は、軌道に従い切削ツールによって(モデル化された物体によって表される)工作物を実際に切削することを含むことができる。製造物体は、部品または部品のアセンブリなどの製品とすることができる。この方法はモデル化された物体の設計を向上させるものであるため、この方法は、製品の製造を向上させ、製造プロセスの生産性を向上させるものでもある。この方法は、DELMIAなどのCAMシステムを使用して実施することが可能である。CAMシステムとは、製造のプロセスおよび動作を定義、シミュレート、および制御するために少なくとも好適な、任意のシステムである。
【0030】
この方法はコンピュータ実施される。すなわち、この方法は、少なくとも1台のコンピュータ、または任意の同様のシステム上で実行される。特に言及されていない限り、方法のすべてのステップは、コンピュータによって、すなわちユーザの介入なしに実行される。例えば、決定ステップ(S20)およびテストステップ(S30)は単独のコンピュータによって実施することができ、提供ステップ(S10)は単独のコンピュータによって、またはユーザ対話を通じて実施することができる。これによって方法は、機械加工の自動テストが可能となる。
【0031】
この方法のコンピュータ実施の典型的な例は、この目的に好適なシステムによって方法を実行することである。システムは、方法を実行するための命令が記録されたメモリを備えることができる。言い換えれば、ソフトウェアは即時使用のためにメモリ上に既に準備されている。したがってシステムは、任意の他のソフトウェアをインストールせずに、方法を実行するために好適である。こうしたシステムは、命令を実行するためにメモリに結合された少なくとも1つのプロセッサを備えることも可能である。言い換えればシステムは、プロセッサに結合されたメモリ上に符号化された命令を備え、この命令が、方法を実行するための手段を提供する。こうしたシステムは、モデル化されたボリュームを設計するための効率的なツールである。
【0032】
こうしたシステムは、CADまたはCAMシステムとすることができる。システムは、CAEシステムとすることも可能であり、モデル化された物体はCAEモデル化物体および/またはCAMモデル化物体とすることも可能である。実際には、モデル化された物体がこれらのシステムの任意の組み合わせに対応するデータによって定義可能であるため、CAD、CAE、およびCAMシステムは互いに排他的ではない。
【0033】
システムは、例えばユーザによって命令の実行を開始するための少なくとも1つのグラフィカルユーザインターフェース(GUI)を備えることができる。特に、GUIは、モデル化されたボリュームを設計すること、および/もしくはスクラッチからの切削ツールの軌道を定義することによって、ならびに/または、モデル化されたボリュームおよび/もしくは切削ツールの軌道を、システムのメモリから、または例えばネットワークサービスによってシステムに結合されているがシステムの外部にあるメモリから取り出すことによって、ユーザが提供ステップ(S10)を開始できるようにすることができる。GUIはGPUを含むことができる。このような場合、プロセッサはGPUとすることができる。言い換えれば、少なくともこの方法のステップ、特に決定ステップ(S20)および/またはテストステップ(S30)を実行するプロセッサは、GPUとすることができる。こうしたシステムは、ユーザによってモデル化されたボリュームを設計するための効率的なツールである。これは、モデル化されたボリュームがデクセルのセットとして提供される場合に、特に有利である。デクセルベースのアルゴリズムは、超並列ハードウェアに好適であるため、最新のグラフィック処理ユニット(GPU)の計算機能の使用を考慮するのは当然である。
【0034】
モデル化されたボリュームは3D(すなわち3次元)とすることができる。これは、モデル化されたボリュームが、その3D表現を可能にするデータによって定義されることを意味する。3D表現は、すべての角度から表されたボリュームを見ることができるようにする。例えばモデル化されたボリュームは、3Dで表された場合、その任意の軸を中心に、または表現が表示される画面内の任意の軸を中心に、処理および回転することができる。これは特に、3Dモデル化されていない2Dアイコンを排除する。3D表現の表示は、設計を容易にする(すなわち、設計者が統計的に自分のタスクを実施する速度を上げる)。製品の設計は製造プロセスの一部であるため、これによって業界における製造プロセスの速度が上昇する。
【0035】
図2は、典型的なCADシステムのGUIの例を示す。
【0036】
GUI2100は、標準メニューバー2110、2120、ならびに下部およびサイドのツールバー2140、2150を有する、典型的なCAD様インターフェースとすることができる。こうしたメニューバーおよびツールバーは、ユーザ選択可能アイコンのセットを含み、各アイコンは、当分野で知られるような1つまたは複数の操作または機能に関連付けられている。これらのアイコンのうちのいくつかは、GUI2100内に表示された3Dモデル化された物体2000上での編集および/または作業に適合した、ソフトウェアツールに関連付けられる。ソフトウェアツールはワークベンチにグループ分けすることができる。各ワークベンチはソフトウェアツールのサブセットを含む。特に、ワークベンチのうちの1つは、モデル化された製品2000の幾何学的特徴を編集するのに好適な編集ワークベンチである。操作時に、設計者は例えば物体2000の一部を事前に選択し、その後、操作(例えば彫刻操作、または寸法、色などを変更するような任意の他の操作)を開始するか、または適切なアイコンを選択することによって幾何学的制約を編集することができる。例えば、典型的なCAD操作は、画面上に表示された3Dモデル化物体のパンチングまたはフォールディングのモデル化である。
【0037】
GUIは、例えば、表示された製品2000に関するデータ2500を表示することができる。図2の例では、「特徴ツリー」として表示されたデータ2500およびそれらの3Dモデル化された物体2000は、ブレーキのキャリパおよびディスクを含むブレーキアセンブリに関連する。GUIは、例えば、物体の3D配向を容易にするため、編集された製品の動作のシミュレーションをトリガするため、または表示された製品2000の様々な属性をレンダリングするために、様々なタイプのグラフィックツール2130、2070、2080をさらに示すことができる。カーソル2060は、ユーザがグラフィックツールと対話できるようにするために、触覚デバイスによって制御可能である。
【0038】
図3は、例えばユーザのワークステーションなどのクライアントコンピュータシステムとして、システムのアーキテクチャの例を示す。
【0039】
クライアントコンピュータは、内部通信BUS1000に接続された中央処理ユニット(CPU)1010と、同じくBUSに接続されたランダムアクセスメモリ(RAM)1070とを備える。クライアントコンピュータには、BUSに接続されたビデオランダムアクセスメモリ1100に関連付けられたグラフィクス処理ユニット(GPU)1110がさらに提供される。ビデオRAM1100は、当分野ではフレームバッファとも呼ばれる。大容量記憶デバイスコントローラ1020は、ハードドライブ1030などの大容量メモリデバイスへのアクセスを管理する。コンピュータプログラムの命令およびデータを有形に具体化するために好適な大容量メモリデバイスは、例えば、EPROM、EEPROM、およびフラッシュメモリデバイスなどの半導体メモリデバイスと、内部ハードディスクおよび取り外し可能ディスクなどの磁気ディスクと、光磁気ディスクと、CD−ROMディスク1040とを含む、すべての形の不揮発性メモリを含む。前述のいずれかは、特別に設計されたASIC(特定用途向け集積回路)によって補助されるか、またはこれに組み込まれることが可能である。ネットワークアダプタ1050は、ネットワーク1060へのアクセスを管理する。クライアントコンピュータは、カーソル制御デバイス、キーボードなどの、触覚デバイス1090を含むこともできる。カーソル制御デバイスは、図2を参照しながら述べたように、ユーザがカーソルをディスプレイ1080上の任意の所望な位置に選択的に配置できるようにするために、クライアントコンピュータ内で使用される。画面により、コンピュータモニタなど、表示を実施することができる任意のサポートを意味している。加えてカーソル制御デバイスは、ユーザが様々なコマンドを入力し、制御信号を入力できるようにするものである。カーソル制御デバイスは、システムに制御信号を入力するためのいくつかの信号生成デバイスを含む。典型的には、カーソル制御デバイスはマウスとすることが可能であり、マウスのボタンは信号を生成するために使用される。
【0040】
システムに方法を実行させるために、コンピュータによる実行のための命令を含むコンピュータプログラムが提供され、命令はこの目的のための手段を含む。プログラムは、例えば、デジタル電子回路内、もしくはコンピュータハードウェア、ファームウェア、ソフトウェア内、またはそれらの組み合わせ内に実装可能である。本発明の装置は、プログラム可能プロセッサによる実行のためにマシン読み取り可能記憶デバイス内に有形に具体化された、コンピュータプログラム製品内に実装可能であり、本発明の方法ステップは、入力データに対する演算および出力の生成によって本発明の機能を実行するために命令のプログラムを実行する、プログラム可能プロセッサによって実施することができる。命令は、データ記憶システム、少なくとも1つの入力デバイス、および少なくとも1つの出力デバイスから、データおよび命令を受信するため、ならびにそれらへデータおよび命令を送信するために結合された、少なくとも1つのプログラム可能プロセッサを含むプログラム可能システム上で実行可能な、1つまたは複数のコンピュータプログラム内に有利に実装可能である。アプリケーションプログラムは、高水準手続き型プログラミング言語もしくはオブジェクト指向プログラミング言語で、または、所望であればアセンブリ言語もしくは機械言語で実装可能であり、いずれの場合も、言語はコンパイル済み言語または解釈済み言語とすることができる。プログラムは、完全インストールプログラムまたは更新プログラムとすることができる。後者の場合、プログラムは既存のCADシステムを、システムが方法の実行に好適な状態に更新する。
【0041】
方法は、工作物および切削ツールの軌道を表すモデル化されたボリュームを提供すること(S10)を含む。モデル化されたボリュームは、任意のボリュームモデリングを使用して提供可能である。例えば、モデル化されたボリュームは、代数的定式化として提供可能である。あるいは、モデル化されたボリュームは、B−Rep(境界表現、すなわちモデル化されたボリュームの境界面に関する定式化)として、または多面体として提供可能である。モデル化されたボリュームは、以下で論じるように、デクセルのセットとしても提供可能である。モデル化されたボリューム、例えば3Dの表現は、方法の間、常時ユーザに表示することも可能である。切削ツールの軌道は、工作物の機械加工時に切削ツールによって取られることになる位置の任意の順序付けされたセットである。切削ツールの表現、例えば3Dを、ユーザに表示することも可能である。軌道の提供は、ユーザによって、例えば工作物の切削をシミュレートするために表示されたモデル化されたボリューム方向に切削ツールを移動させるなど、例えば画面上の切削ツールの表現を処理するユーザによって実施することができる。この方法は、切削ツールの軌道に従ってモデル化されたボリュームを更新することができる。例えばこの方法は、モデル化されたボリューム上で切削を実行すること、ならびに、その一方でまたは事前に、例えばリアルタイムで、例えば衝突が検出された場合に切削を停止するように、決定(S20)およびテスト(S30)を実行することを、含むことができる。このような場合、方法は、衝突が検出された旨の情報をユーザに表示することを含むことができる。
【0042】
方法は、切削ツールの衝突掃引を決定すること(S20)も含むことができる。衝突掃引は、切削ツールが軌道をたどる場合に、切削ツールの非切削前部によって掃引されるボリュームを表すデータである。一般に、切削ツールは切削部および非切削部を有し、これらはそれぞれ「切削ボリューム」および「非切削ボリューム」と呼ばれることもある。切削部と非切削部との間の境界は可変である可能性があり、すなわち異なる境界が存在可能であるため、それにより、場合によっては切削ツールの切削部および非切削部からなる異なるペアを定義する。切削ツールは、フライス盤、ボール盤、さらにはナイフとすることができる。いずれの場合でも、切削ツールは、例えば作業者またはロボットによって切削ツールを例えば処理および移動させるための、非切削部(例えばハンドル)を有する。実際に、切削ツールは、切削部および非切削部の剛性アセンブリである。ツールの軌道は、例えばユーザによって定義される一連の位置である。非切削部は、材料を切削しない切削ツールの一部であるため、遭遇する任意の固体と衝突する。切削ツールが軌道をたどる場合、切削ツールの非切削前部は、軌道上の切削ツールの所与の位置での、切削ツールが軌道をたどる場合にそうした位置で固体に衝突することになる(切削ツールが軌道をたどり始める前に固体がそうした位置に配置されている場合)ような、切削ツールのポイントのサブセットである。非切削前部の正式な定式化は、後で提供される。非切削前部によって掃引されるボリュームは、(例えば、工作物の少なくとも一部がこうした掃引されるボリューム内にある場合)潜在的な衝突が存在するボリュームである。衝突掃引は、こうしたボリューム(場合によっては掃引されるボリュームそれ自体またはその近似)を表す任意のボリュームデータである。これによって方法は、軌道の機能において切削ツールのポイントの衝突位置を表す3D空間のボリュームを決定することができる。
【0043】
この方法は、決定(S20)ステップに従って(すなわち、決定された衝突掃引の機能において)、工作物との衝突をテストすること(S30)をさらに含む。テストすること(S30)は、衝突を検出した場合(潜在的な衝突の場合)に肯定的な結果を引き出すこと、またはその逆の場合に否定的な結果を引き出すことができる。例えば、テストすること(S30)は、衝突掃引と工作物との間に交差が存在するかどうかを決定することを含むことができる。したがってこの方法は、衝突掃引(によって表されるボリューム)が工作物と交差するか否かを決定することができる。交差する場合、方法によって衝突が検出される。
【0044】
この方法のコンテキストは、コンピュータ支援システムまたはコンピュータ支援製造システムを使用するリアルタイムの機械加工シミュレーションである。この方法は、切削部および非切削部を有する切削ツールによって工作物を機械加工する、信頼できるシミュレーションを提供する。実際に、この方法は、わずかな偽の否定的結果を伴い(すなわち、わずかな可能な衝突がテスト(S30)によって見逃されて)、高速に衝突を検出する。これは衝突掃引を決定する(S20)際に、切削ツールの軌道が考慮されるためである。
【0045】
決定すること(S20)は、軌道を基本ステップに区分することを含むことができる。このような場合、決定すること(S20)およびテストすること(S30)は、各基本ステップに対して実施することができる。これにより、衝突掃引が容易に決定されるように、高速テスト(S30)が可能となる。また、これによって、テスト(S30)の偽の肯定的な結果を有する機会も減少する。ツール軌道の基本ステップは、2つの連続する位置の間でのツールの動きとすることができる。ツール軌道の各基本ステップで、切削部によって保護された非切削可動部の表面によって掃引されるボリュームを、非切削部によって掃引されるボリュームから差し引くことができる。その結果が現行の工作物と交差していない場合、この基本的な動きではクラッシュ(すなわち衝突)が発生しない旨を決定することができる。このチェックの後、(基本的な動きに従ってモデル化されたボリュームの一部を切削することにより)現行の工作物を更新することができる。これにより、速度の向上および信頼性の向上の両方が得られる。実際に、この方法は、それぞれの基本軌道ステップを改善する(したがって良好な性能を可能にする)必要はなく、信頼性はいずれの数値精度値にも依存しない。性能および信頼性は、変位ベクトルの方向に依存しない。
【0046】
この区分は、所定の時間ステップに依存することができる。例えばこの方法は、それぞれが所定の時間ステップ中のユーザによる切削ツールの表現の処理に対応する、基本ステップに、軌道を区分することが可能である。あるいはこの方法は、所定の長さの基本ステップに軌道を区分することが可能である。あるいはこの方法は、等しい長さの所定数の基本ステップに軌道を区分することが可能である。
【0047】
あるいはこの方法は、それぞれが規則正しい軌道を定義する基本ステップに軌道を区分することが可能である。規則正しい軌道により、切削ツールの各所与のポイントについて、所与のポイントの一連の位置によって定義される曲線は(切削ツールが軌道をたどる場合)、尖点を有さない(すなわち特異点を有さない)。例えば基本ステップは、彫刻ツールのキネマティックの記述のための、線形、円形、らせん形の弧(すなわちコイル部分)または曲線とすることができる。こうした区分が、テストステップ(S3)での偽の肯定の回数を効率的に低減させる。
【0048】
切削ツールは、切削と何らかの他の非切削との何らかの境界を伴う凸状の面とすることができる。これにより、テスト(S30)のより信頼できる結果が保証される。
【0049】
この方法は、工作物を更新する間の、ツールの切削部の動きとツールの非切削部の動きとを分離する。これは、方法の適用例を示す図4〜6を参照しながら例示される。
【0050】
この例では、方法は、切削部42および非切削部44を備える切削ツール40、ならびに工作物を表すモデル化されたボリューム46を、ユーザに表示することを含む。図4では、モデル化されたボリューム46は更新前の工作物を表す。図5〜6では、モデル化されたボリューム46は更新後の工作物を表す。
【0051】
切削部42はツール40の半球部分であり、非切削部44はツール40の円柱部分(例えばツール胴部)である。切削ステップ前の工作物は、図4の台形形状のボリューム46である。
【0052】
ツール40が右上から左下へと降下している場合、図5に示されるように切削前部はツール胴部に先行するため、(実際の機械加工プロセスにおいて)衝突は発生しないことが観察できる。これに対して、左下から右上へと上昇すると、図6に示されるようにツール胴部が切削前部に先行するため、(実際の機械加工において)ツール胴部44と工作物との間に衝突48が生じる。
【0053】
したがって方法は、この非対称的な挙動を予測するために設計され、図6の場合では衝突を効率的に検出するが、図5の場合では衝突を効率的に検出しない。さらにこのような場合、軌道は単一の基本ステップを含むことができる。したがって方法は、軌道全体に対してテスト(S30)を高速に実行することができる。
【0054】
次に、図7〜21を参照しながら、この方法の例について論じる。これらの例は、図4〜6を参照しながら論じた例と組み合わせ可能である。
【0055】
可動の切削ツール40は、切削ボリューム42および非切削ボリューム44に分解される。切削ボリューム42および非切削ボリューム44によって共有される内部境界72は、実際的な意義を有さず、材料の除去または衝突挙動に影響を与えないことに留意されたい。したがって、この境界72表面は計算の便宜上選択され、任意に設定可能である。この例では、境界72は便宜的にディスクとして選択される。
【0056】
第1の例では、衝突掃引を決定することは、切削ツール40が軌道をたどる場合、切削ツール40の非切削前部によって掃引されるボリュームを決定することを含む。言い換えれば、この方法は、切削ツール40が軌道をたどる場合、切削ツール40の非切削前部によって掃引されるボリュームを実際に決定し、衝突掃引はこうして決定されたボリュームに等しいことが可能である。
【0057】
この例では、ツール40は、切削ボリューム42および非切削ボリューム44を含む剛性可動アセンブリである。Vを非切削ボリューム44の値としてみる。本来の手法では、工作物と掃引されるボリュームVとの交差を考慮することができる。軌道を、関数t∈[0,1]→Traj(t)によって定義し、この式で、各t∈[0,1]について、Traj(t)は等長変換であるとすると、掃引されるボリュームVは、
【0058】
【数1】
【0059】
である。
【0060】
各t∈[0,1]で、等長変換Traj(t)は回転Rot(t)および変換Trans(t)によって定義され、これは、3次元空間のポイントxが位置Traj(t)(x)=Rot(t)x+Trans(t)で移動されることを意味する。
【0061】
この方法は、本来の掃引されるボリュームの概念の代わりに、いわゆる前進する外側前部の合併を使用することによって、より高度な定義を考慮する。Souterを、ツール参照で定義された、ツール40の外側境界でもある切削ボリューム42の境界とする。図7の例では、ツールは切削ボリューム42および非切削ボリューム44に分解される。図8は、対応するSouterを実線(非破線)として示している。任意のポイントx∈Souterで、図9に示されるように、外側法線ベクトルn(x)が示される。
【0062】
所与のt∈[0,1]について、Front(t)で示されるツール40の非切削前部を、以下のように定義されるSouterのサブセットとする。
【0063】
【数2】
【0064】
上式で、<u,v>はベクトルuとvとの間のスカラ積を示し、Rot(t)は軌道Traj(t)の回転構成要素である。言い換えれば、Front(t)はSouterのポイントのセットであり、時間tでのその瞬間速度ベクトルは可動のツール40の外部方向に配向される。
【0065】
例えば、図10に示されるように、ツール40は、ポイントP1からポイントP2へと線セグメント100に沿って移動可能である。したがって、すべてのtについてRot(t)=Idであるため、Traj(t)x=x+t(P2−P1)である。そこで、すべてのtについて、
【0066】
【数3】
【0067】
である。したがってt=0では、Front(t)は図10で太線によって示される垂直セグメント102である。
【0068】
P2からP1への逆軌道110は、図11で逆L字形太線112によって示されるような、異なるFront(t=0)を誘導する。
【0069】
この方法は、「衝突掃引」をFront(t)によって掃引されるボリュームとして、以下のように決定すること(S20)ができる。
【0070】
【数4】
【0071】
この方法は、現行の工作物に照らして非切削ボリューム掃引をチェックすることとは対照的に、現行の工作物に照らして衝突掃引をチェックする。
【0072】
図12は、下降する軌道に従って計算された衝突掃引120を示す。明らかに、衝突掃引120およびモデル化されたボリューム46は分離され、これは、ツール40の非切削ボリュームが、軌道のこの部分の間に、モデル化されたボリューム46にクラッシュしないことを意味する。
【0073】
次に、図13は、上昇する軌道に従った衝突掃引120を示す。Front(t=0)の形状により、衝突掃引120は異なり、ボリューム46と重複する。これは、ツール40の非切削ボリューム44が、軌道のこの部分の間に、モデル化されたボリューム46に実際にクラッシュすることを意味する。
【0074】
第2の例では、この方法は、切削ツールの保護前部を決定することを含む。切削ツールの保護前部は、切削ツールが軌道をたどる場合、軌道上の切削ツールの所与の位置での切削ツールのポイントのサブセットであり、切削ツールが軌道をたどる場合、切削ツールの他のポイントがそうした位置にある固体と衝突するのを防ぐ(切削ツールが軌道をたどり始める前に固体がそうした位置に配置されている場合)。保護前部の正式な定式化は、後で提供される。
【0075】
衝突掃引を決定すること(S20)は、このような場合、非切削部によって掃引されるボリュームおよび保護前部によって掃引されるボリュームを決定することを含むことができる。その後、この方法は、当該2つのボリューム間の相違を決定することができる。テストすること(S30)は、当該ボリュームの相違がモデル化されたボリュームと交差するかどうかを評価することを含むことが可能であり、交差する場合は肯定結果を引き出し、交差しない場合は否定結果を引き出す。これにより、高速でロバストな決定(S20)が可能である。
【0076】
便宜上、例は2Dで示されている。しかしながら実際は、前述のように3次元である。図14〜15は、例の3D図を提供する。図14は、非切削ボリューム44を(長方形ではなく)円柱形として示している。図15は、衝突掃引120が、傾斜軌道に沿って半円柱形フランクによって掃引されるボリュームであり、凸面体でないことを示している。
【0077】
この第2の例ならびに第1の例では、方法の実装はマルチデクセルモデルとすることができる。言い換えれば、工作物は(それによってモデル化されたボリュームを表す)デクセルのセットによって表すことができる。言い換えれば、この例では、モデル化されたボリュームはデクセルのセットとして提供される。(デクセルのセットの)各デクセルは、少なくとも1つのセグメントのセットを備える。こうしたセグメントは、線と工作物との間の交差を表す。
【0078】
工作物を表すためにデクセルのセットを使用することで、(少ないメモリスペースを使用する)軽量表現が可能となる。これにより、容易に処理可能な工作物の表現も可能となる。特に、デクセルのセットのデータ構造により、工作物がデクセルのセットによって表される場合、切削は特に効率的に実行することができる。実際に、設計動作は高反応性および高ロバストネスで実施することができる。特に、デクセルのセットに対する演算は、効率が増大するように、並列処理を介して線ごとに実施することができる。したがって、システムのプロセッサはGPUとすることができることが効率的である。
【0079】
「デクセル」という用語は、「深さ要素」のショートカットであるものと知られている(「ピクセル」という用語が「画像要素」のショートカットであるのと同様)。デクセルの概念は、数多くの研究論文で言及されている。この方法との関連において、デクセルは少なくとも1つのセグメントのセット、すなわち3Dポイントのペアを含む。ある例では、モデル化されたボリュームは、少なくとも2つのセグメントのセットを含む少なくとも1つのデクセルを含む(例えば、デクセルの初期セットおよび/またはデクセルの新規セットは少なくとも2つのセグメントを含む)。デクセルのセグメントは、いくつかある場合、順序付けする(このような場合、デクセルはリストである)か、または順序付けしないことが可能である。デクセルのセグメントは、線と工作物との間の交差を表す。言い換えれば、仮想線が工作物と交差するものと考えると、デクセルは所与の線から始まるセグメントのセットであり、交差の計算の結果から生じる。
【0080】
デクセルのセットは、コンピュータ実施データとして提供されることに留意されたい。したがって、モデル化されたボリュームの任意の表現に関して上記および下記で提供される定義は、図のデータ構造ポイントからの影響を受ける。例えば、セグメントは3D位置のペア(例えば互いにリンクされた2つの3D位置)として提供可能である。3D位置は、それ自体、参照3Dフレームに関連付けられた3つの座標(例えば浮動小数点)のリストとして提供可能である。デクセルは、セグメントがセット構造において互いにリンクされていることを示唆する、セグメントのセットである。デクセルのセットのデクセルも、同様に互いにリンクされることが可能である。モデル化されたボリュームを、それら自体が少なくとも1つのセグメントのセットを有するデクセルのセットによって表すことにより、モデル化されたボリュームの高速テスト(S30)ならびに高速の隠された更新が可能となる。
【0081】
衝突をテストすること(S30)は、それぞれのデクセルについて、保護前部によって掃引されるボリュームと交差するそれぞれのデクセルのセグメントを決定すること、それに応じて(すなわち、決定されたセグメントの機能において、すなわち決定されたデクセルを短縮および/または廃棄することによって)それぞれのデクセルを更新すること、ならびに、更新されたそれぞれのデクセルのセグメントが非切削部によって掃引されるボリュームと交差するかどうかを評価することを、含むことができる。その後、方法は、評価が肯定である場合はテストの肯定結果を、または評価が否定である場合は否定結果を、引き出すことができる。
【0082】
この方法は、保護前部および非切削部を定義する(例えば、前述のように、保護前部は任意で定義可能であり、切削ツールを切削部と非切削部に分割することができる)ことを含むことができるため、結果として、保護前部によって掃引されるボリュームおよび非切削部によって掃引されるボリュームは凸状の面となる。当業者であれば、こうした分割を実行してどのように凸面部を取得するかについて理解されよう。このような場合、保護前部によって掃引されるボリュームと交差するそれぞれのデクセルのセグメントを決定すること、および、更新されたそれぞれのデクセルのセグメントが非切削部によって掃引されるボリュームと交差するかどうかを評価することが、特に高速に実行される。
【0083】
実際に、それぞれのデクセルのセグメントは、典型的に順序付けすることができる(実際の順序は、デクセルを定義するデータ内に存在可能であるか、またはこうした順序を本来存在するままに取り出すことができる)。非切削部は、例えば、非切削部が凸状の面であり、基本ステップが単純変換である場合、凸面ボリュームを掃引することができる。加えて、保護前部も同様に凸面ボリュームを掃引することができる。例えば、切削部も同様に凸状の面とすることができる。軌道は、単純変換からなる基本ステップに分割することができる。それぞれのデクセルを更新することは、保護前部によって掃引されるボリュームと交差する最小順番のセグメント(例えば、それぞれのデクセルのセグメントの順序で進められる場合、保護前部によって掃引されるボリュームと交差する第1のセグメント)を短縮すること、保護前部によって掃引されるボリュームと交差する最大順番のセグメント(例えば、それぞれのデクセルのセグメントの順序で進められる場合、保護前部によって掃引されるボリュームと交差する最後のセグメント)を短縮すること、および、最小順番のセグメントと最大順番のセグメントとの間のすべてのセグメントを除去することを含む。
【0084】
次に、この方法の第2の例について、図16〜21を参照しながら論じる。
【0085】
デクセルの使用との関連において、処理ポイントの観点から、凸面衝突掃引を管理すること、または不可能な場合、2つの凸面セットの減算によって定義された固体を管理することが、より効率的である可能性がある。実際に、2つの凸面セットの相違のセットS、S=C1−C2とセグメントとの交差は、以下のように実施することができる。
【0086】
この方法は、C1およびC2を備えるセグメントをサポートする線Lと交差することが可能であり、これによって、2つの可能な空のセグメントI1=L∩C1およびI2=L∩C2が与えられる。L∩S=L∩(C1−C2)=(L∩C1)−(L∩C2)=I1−I2であることが観察できる。もちろん、線Lによってサポートされるセグメントは、Lのパラメータ表示内の間隔として表すことができる。Sと共にLによってサポートされるセグメントの交差は、2つの間隔の相違を伴う間隔の交差にまとめられ、後者は、最悪の場合、2つの間隔の合併である。
【0087】
このため、以前に提示された第1の例は、特にデクセルモデルとの関連において、この方法をより実際的にするために再公式化することができる。凸面の非切削ボリュームVについて考えてみる。発明者等は、Souter内にないVの境界をSprotectと呼ぶ。言い換えれば、Sprotectは、ツールの他の切削ボリュームまたは非切削ボリュームと接触しているVの面を含む。
【0088】
NC機械加工シミュレーションなどの実際的な状況において、最も一般的なツールの形状は、Sprotectが1つまたは複数の平面を含むことを可能にする。しかしながら、切削ボリュームと非切削ボリュームとの間の内部分離に物理的な意義はなく、したがって、結果として生じる挙動にいかなる影響も無しに、平面としてしばしば選択される可能性があることに留意されたい。
【0089】
図4〜15の例の場合、Sprotectはディスクとすることができる。図16〜18に示されるように、Sprotectは切削ボリュームと非切削ボリュームとを分離する実線である。
【0090】
この方法は、衝突掃引を、全凸面非切削ボリュームの掃引とSprotectのサブセットの掃引との間の設定された理論上の相違として定義することができる。このサブセットは、外側法線ポイントが掃引方向にある、Sprotectのすべてのポイントを含む。一般的な非変換軌道の場合、Sprotectのある部分は、即時掃引速度方向に向かう外側法線ポイントを有し、ある部分は有さないことが可能である。この場合、Sprotectのサブセットのみを掃引することができる。変換掃引の場合、これは2つの凸面セットの減算であり、マルチデクセルモデルにおいて容易に管理可能である。
【0091】
正式には、この方法は以下のように定義可能である。
【0092】
【数5】
【0093】
したがって、衝突掃引の以前の定義に従い、以下の式が得られる。
【0094】
【数6】
【0095】
したがって、マルチデクセルグリッド表現を使用する機械加工シミュレーションとの関連において、この方法は、以下の動作によって基本軌道中の衝突を容易にチェックすることができる。
【0096】
各デクセルについて、この方法は、図19に示されたように、非切削ボリューム190の掃引との交差によって与えられる、間隔Ai(すなわち、この例のデクセルのサポート線上の間隔として格納されたデクセルのセグメント)を計算することができる。これらの間隔Aiのすべてが現行の工作物との空の交差を有する場合、衝突が生じないことを保証することが可能であり、すなわち、テストすること(S30)は否定結果を引き出すことができる。
【0097】
さもなければ、この方法は、t=0からt=1までprotectFrontによって掃引されるボリュームを計算することができる(軌道、または基本ステップが、0から1へ進むパラメータ化で定義される場合)。この場合、方法は、その外側法線が変位ベクトルを用いる正のドット積を有する、Sprotectの面200を集めることができる。その後、この方法は、図20に示されるように、これらの面200によって掃引されるボリュームを計算することができる。この方法は、最終的に、図20に示されるように、デクセルとこの掃引されるボリューム202との間の交差に等しい間隔Biを計算することができる。この方法は、ブール1次元減算C1=Ai−Biを計算することが可能であり、この結果として生じる間隔は、図21に示されるように、デクセルと衝突掃引ボリューム190との間の交差を表す。これらのC1間隔が工作物層を格納するデクセル間隔との空でない交差を有する場合、そのデクセル上で衝突が生じることになるものと結論付けることができる。衝突深さも推測可能である。さもなければ、図21に示されるように、そのデクセル上に衝突は発生しない。
【符号の説明】
【0098】
40 切削ツール
42 切削ボリューム
44、190 非切削ボリューム
46、202 ボリューム
48 衝突
72 内部境界
100 線セグメント
102 垂直セグメント
110 逆軌道
112 逆L字形太線
120 衝突掃引
200 面
1000 内部通信BUS
1010 CPU
1020 大容量記憶デバイスコントローラ
1030 ハードドライブ
1040 CDROM
1050 ネットワークアダプタ
1060 ネットワーク
1070 RAM
1080 ディスプレイ
1090 触覚デバイス
1100 ビデオRAM
1110 GPU
2000 物体
2060 カーソル
2070、2080、2130 グラフィックツール
2100 GUI
2110、2120 標準メニューバー
2140、2150 ツールバー
【特許請求の範囲】
【請求項1】
切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための、コンピュータ実施方法であって、
前記工作物および前記切削ツールの軌道を表すモデル化されたボリュームを提供するステップ(S10)と、
前記切削ツールの衝突掃引を決定するステップ(S20)であって、前記衝突掃引は、前記切削ツールが前記軌道をたどる場合に、前記切削ツールの前記非切削前部によって掃引される前記ボリュームを表す、ステップ(S20)と、
前記決定ステップ(S20)に従って前記工作物との衝突をテストするステップ(S30)と
を含むことを特徴とする方法。
【請求項2】
前記切削ツールの保護前部を決定するステップを含み、前記衝突掃引を決定するステップは、前記非切削部によって掃引される前記ボリュームおよび前記保護前部によって掃引される前記ボリュームを決定するステップを含むことを特徴とする請求項1に記載の方法。
【請求項3】
前記工作物はデクセルのセットによって表され、各デクセルは線と前記工作物との間の交差を表す少なくとも1つのセグメントのセットを含み、前記衝突をテストするステップは、それぞれのデクセルについて、
前記保護前部によって掃引される前記ボリュームと交差する前記それぞれのデクセルの前記セグメントを決定するステップと、
それに応じて前記それぞれのデクセルを更新するステップと、
更新された前記それぞれのデクセルの前記セグメントが前記非切削部によって掃引される前記ボリュームと交差するかどうかを評価するステップと
を含むことを特徴とする請求項2に記載の方法。
【請求項4】
前記切削部は凸状であり、前記それぞれのデクセルの前記セグメントは順序付けられ、前記それぞれのデクセルを更新するステップは、
前記保護前部によって掃引される前記ボリュームと交差する最小順番の前記セグメントを短縮するステップと、
前記保護前部によって掃引される前記ボリュームと交差する最大順番の前記セグメントを短縮するステップと、
前記最小順番のセグメントと前記最大順番のセグメントとの間のすべてのセグメントを除去するステップと
を含むことを特徴とする請求項3に記載の方法。
【請求項5】
前記衝突掃引を決定するステップは、前記切削ツールが前記軌道をたどる場合、前記切削ツールの前記非切削前部によって掃引される前記ボリュームを決定するステップを含むことを特徴とする請求項1に記載の方法。
【請求項6】
請求項1から5のいずれか一項に記載の方法を実行するための命令が記録されているメモリと、
前記メモリに結合されたプロセッサと、
前記プロセッサに結合され、前記命令を実行するように好適な、少なくとも1つのグラフィカルユーザインターフェースと
を備えることを特徴とするCAMシステム。
【請求項7】
前記プロセッサはGPU(グラフィック処理ユニット)であることを特徴とする請求項6に記載のシステム。
【請求項8】
請求項1から7のいずれか一項に記載の方法を実行するための命令を含むことを特徴とするコンピュータプログラム。
【請求項9】
請求項8に記載のコンピュータプログラムが記録されていることを特徴とするコンピュータ読み取り可能記憶媒体。
【請求項1】
切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための、コンピュータ実施方法であって、
前記工作物および前記切削ツールの軌道を表すモデル化されたボリュームを提供するステップ(S10)と、
前記切削ツールの衝突掃引を決定するステップ(S20)であって、前記衝突掃引は、前記切削ツールが前記軌道をたどる場合に、前記切削ツールの前記非切削前部によって掃引される前記ボリュームを表す、ステップ(S20)と、
前記決定ステップ(S20)に従って前記工作物との衝突をテストするステップ(S30)と
を含むことを特徴とする方法。
【請求項2】
前記切削ツールの保護前部を決定するステップを含み、前記衝突掃引を決定するステップは、前記非切削部によって掃引される前記ボリュームおよび前記保護前部によって掃引される前記ボリュームを決定するステップを含むことを特徴とする請求項1に記載の方法。
【請求項3】
前記工作物はデクセルのセットによって表され、各デクセルは線と前記工作物との間の交差を表す少なくとも1つのセグメントのセットを含み、前記衝突をテストするステップは、それぞれのデクセルについて、
前記保護前部によって掃引される前記ボリュームと交差する前記それぞれのデクセルの前記セグメントを決定するステップと、
それに応じて前記それぞれのデクセルを更新するステップと、
更新された前記それぞれのデクセルの前記セグメントが前記非切削部によって掃引される前記ボリュームと交差するかどうかを評価するステップと
を含むことを特徴とする請求項2に記載の方法。
【請求項4】
前記切削部は凸状であり、前記それぞれのデクセルの前記セグメントは順序付けられ、前記それぞれのデクセルを更新するステップは、
前記保護前部によって掃引される前記ボリュームと交差する最小順番の前記セグメントを短縮するステップと、
前記保護前部によって掃引される前記ボリュームと交差する最大順番の前記セグメントを短縮するステップと、
前記最小順番のセグメントと前記最大順番のセグメントとの間のすべてのセグメントを除去するステップと
を含むことを特徴とする請求項3に記載の方法。
【請求項5】
前記衝突掃引を決定するステップは、前記切削ツールが前記軌道をたどる場合、前記切削ツールの前記非切削前部によって掃引される前記ボリュームを決定するステップを含むことを特徴とする請求項1に記載の方法。
【請求項6】
請求項1から5のいずれか一項に記載の方法を実行するための命令が記録されているメモリと、
前記メモリに結合されたプロセッサと、
前記プロセッサに結合され、前記命令を実行するように好適な、少なくとも1つのグラフィカルユーザインターフェースと
を備えることを特徴とするCAMシステム。
【請求項7】
前記プロセッサはGPU(グラフィック処理ユニット)であることを特徴とする請求項6に記載のシステム。
【請求項8】
請求項1から7のいずれか一項に記載の方法を実行するための命令を含むことを特徴とするコンピュータプログラム。
【請求項9】
請求項8に記載のコンピュータプログラムが記録されていることを特徴とするコンピュータ読み取り可能記憶媒体。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】

【図14】
【図15】

【図16】
【図17】
【図18】
【図19】

【図20】

【図21】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2013−97813(P2013−97813A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−242873(P2012−242873)
【出願日】平成24年11月2日(2012.11.2)
【出願人】(500102435)ダッソー システムズ (52)
【氏名又は名称原語表記】DASSAULT SYSTEMES
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2012−242873(P2012−242873)
【出願日】平成24年11月2日(2012.11.2)
【出願人】(500102435)ダッソー システムズ (52)
【氏名又は名称原語表記】DASSAULT SYSTEMES
【Fターム(参考)】
[ Back to top ]