
左右連動操作装置
【課題】左右の操作手段に各々設けた操作量検出手段から得る出力値においてその誤差を低減させることができる左右連動操作装置を提供する。
【解決手段】左右連動操作装置は、操作者が手にするグリップ4,5が左右両側に一対配置され、一方に生じた操作力を他方に連動性を持って伝達可能な連動操作伝達機構により、2つのグリップ4,5のうち一方を操作すると他方もそれに追従するように同方向に連動して動き、2つのグリップ4,5の各々の操作量を検出可能である。左右連動操作装置は、グリップ4,5の操作有無を検出するタッチセンサ30,31と、操作状態を判定する操作状態判定部37aと、操作状態判定部37aによって片手操作を検出した際、操作されていない側のグリップ4,5に設けられたロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正する補正部37bとを備えた。
【解決手段】左右連動操作装置は、操作者が手にするグリップ4,5が左右両側に一対配置され、一方に生じた操作力を他方に連動性を持って伝達可能な連動操作伝達機構により、2つのグリップ4,5のうち一方を操作すると他方もそれに追従するように同方向に連動して動き、2つのグリップ4,5の各々の操作量を検出可能である。左右連動操作装置は、グリップ4,5の操作有無を検出するタッチセンサ30,31と、操作状態を判定する操作状態判定部37aと、操作状態判定部37aによって片手操作を検出した際、操作されていない側のグリップ4,5に設けられたロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正する補正部37bとを備えた。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、各種装置や機器を動作させる際の操作系として運転者が握り操作するグリップが操作者の左右両側に存在するとともにこれら左右グリップが連動して動く左右連動操作装置に関する。
【背景技術】
【0002】
従来、運転者がハンドル等の走行操作装置を操作して運転走行する際に、この運転者にかかる疲労を低減する技術が種々開発されている。その一技術としては、走行操作装置の操作箇所であるグリップに加減速操作系と操舵操作系との両方を集約し、1つのグリップを操作することのみで車両の加減速操作及び操舵操作を可能とする技術がある(例えば、特許文献1参照)。この技術を使用すれば、手によるグリップ操作(レバー操作)のみで車両の加減速操作及び操舵操作の両方を行うことが可能となるので、車両操作時において脚の操作が不要となる。よって、運転操作において脚操作が不要となる分だけ運転操作が楽になるので、運転操作を疲労のかかり難いものとすることが可能となる。
【0003】
また、この種の走行操作装置としては、例えば運転席の左右両側にグリップを配置してこれらに連動性を持たせる左右連動操作装置というものも開発されている。この左右連動操作装置は、左右のグリップのうち一方を操作すると、他方のグリップも同様の操作方向に動く動作をとる操作装置である。このように、運転席の左右にグリップを配置するのは、車両運転中に例えば仮に一方の手が使用できない状態となっても、もう片方の手で車両の走行操作ができるようにするためである。左右のグリップは、例えば一例としてプッシュプルケーブルによって連結され、このプッシュプルケーブルの押し−引きを利用してグリップ操作を他方に伝達することによって左右が連動する。このグリップ操作の操作量は、各々のグリップにセンサを設けて、このセンサからの出力値によってグリップ操作量が検出される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−258959号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、この種の左右連動操作装置では、ギアやプッシュプルケーブル等によってグリップ操作を伝達する際に、ギアやプッシュプルケーブル等のバックラッシュやクリアランス等によって完全に誤差なく連動させることができない現状がある。そして、例えば車両運転中に片方の手で走行操作すると、走行操作されていない非操作グリップ側のセンサ出力が上記誤差のために走行操作されている操作グリップ側のセンサ出力よりも若干少なくなる場合がある。このため、操作者が片手操作を行った際、操作グリップ側のセンサ出力は100%の値をとるものの、非操作グリップ側のセンサ出力が100%に満たない値をとることがあり、左右のセンサ出力で誤差が生じる問題があった。
【0006】
この発明は、こうした実情に鑑みてなされたものであり、その目的は、左右の操作手段に各々設けた操作量検出手段から得る出力値においてその誤差を低減させることができる左右連動操作装置を提供することにある。
【課題を解決するための手段】
【0007】
以下、上記目的を達成するための手段及びその作用効果について説明する。
請求項1に記載の発明は、操作者が手にする操作箇所として操作手段が前記操作者の左右両側に一対配置され、一方に生じた操作力を他方に連動性を持って伝達可能な連動操作伝達機構により、2つの前記操作手段のうち一方を操作すると他方もそれに追従するように同方向に連動して動き、2つの前記操作手段の各々の操作量を、各々の前記操作手段に設けた操作量検出手段によって検出する左右連動操作装置において、操作者による2つの前記操作手段の操作状態を判定する操作状態判定手段と、前記操作状態判定手段によって片手操作を検出した際、操作されていない側の前記操作手段に設けられた前記操作量検出手段である非操作側操作量検出手段の出力値を補正する補正手段とを備えたことをその要旨としている。
【0008】
同構成によれば、操作手段の片手操作が操作状態判定手段によって監視され、片手操作が検出された際には、操作されていない側の操作手段に設けられた非操作側操作量検出手段の出力値が補正手段によって補正される。ところで、片手操作の際には、連動操作伝達機構に生じるバックラッシュやクリアランス等を原因として、非操作側操作量検出手段の出力値が、操作側の操作量検出手段である操作側操作量検出手段の出力値に対して誤差を持って出力されることもある。こうなると、左右の操作量検出手段の出力値に誤差が生じ、正確な操作量検出に支障を来す。しかし、本構成の場合は、片手操作の際には、非操作側操作量検出手段の出力値が操作側操作量検出手段の出力値に近づくように補正されるので、左右の出力誤差を低く抑えることが可能となる。
【0009】
請求項2に記載の発明は、請求項1に記載の左右連動操作装置において、前記操作状態判定手段は、前記操作手段に対する操作有無を検出する操作検出手段として、同操作手段への接触有無を検出するタッチセンサを使用したことをその要旨としている。
【0010】
同構成によれば、操作検出手段としてタッチセンサを使用するので、操作者によって操作手段が操作されているか否かを、操作者が操作手段に触れているか否かによって検出することが可能となる。このように、操作手段の操作有無を、単なる操作手段への手等の接触により操作有無を検出することが可能となれば、操作手段の片手操作を速やかに検出することが可能となる。
【0011】
請求項3に記載の発明は、請求項1又は2に記載の左右連動操作装置において、前記補正手段は、前記片手操作が発生した際、片手操作された側の前記操作手段の前記操作量検出手段である操作側操作量検出手段の出力値を、前記非操作側操作量検出手段の出力値として優先使用することにより、前記非操作側操作量検出手段の出力値を補正することをその要旨としている。
【0012】
同構成によれば、2つの操作量検出手段の出力値のうち、片手操作された側の出力値を優先使用するという簡単な方式によって、非操作側操作量検出手段の出力値を補正することが可能となる。
【0013】
請求項4に記載の発明は、請求項1〜3のいずれか一項に記載の左右連動操作装置において、2つの前記操作手段のうち、どちらが利き手側のものであるのかを設定する設定手段を備え、前記操作状態判定手段は、前記操作手段に対する操作有無の検出が可能な操作検出手段を、前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、前記補正手段は、前記操作状態判定手段で両手操作を検出した際、操作者の利き手側の前記操作量検出手段の出力値を優先使用することにより、利き手でない側の前記操作量検出手段の出力値を補正することをその要旨としている。
【0014】
ところで、操作者が操作手段を操作する際には、少なからず利き手側の操作手段に、これと反対側の操作手段よりも大きい操作力が加えられる傾向があり、このような操作によって左右のセンサ出力に誤差が発生する可能性がある。そこで、上記構成によれば、両方の操作手段が握られている両手操作であることが操作状態判定手段で検出された際には、操作者の利き手側の操作量検出手段の出力値を優先使用する。このため、両方の操作手段が操作される状況下で左右の操作量検出手段の出力値に誤差が発生していても、これに対応することが可能となる。
【0015】
請求項5に記載の発明は、請求項1に記載の左右連動操作装置において、前記操作状態判定手段は、前記操作手段に対する操作有無を検出する操作検出手段として、前記操作手段自身にかかる荷重を検出する荷重センサを使用したことをその要旨としている。
【0016】
同構成によれば、操作検出手段として荷重センサを使用するので、操作者が操作手段にどの程度の荷重をかけているかにより、操作手段に対する操作有無が検出される。このため、操作手段を操作する意志があるときには、操作手段に大きな荷重が加えられるはずであるから、操作手段の操作有無を操作手段にかかる荷重で検出するようにすれば、操作手段の片手操作有無を、より精度よく検出することが可能となる。
【0017】
請求項6に記載の発明は、請求項5に記載の左右連動操作装置において、前記操作状態判定手段は、前記荷重センサを前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、前記補正手段は、前記操作状態判定手段で両手操作を検出した際、一方の操作荷重のみが閾値を超えていれば、当該両手操作を片手操作として処理し、操作されていない側の前記操作手段の前記操作量検出手段である非操作側操作量検出手段の出力値を補正することをその要旨としている。
【0018】
同構成によれば、両方の操作手段が握られている両手操作であることが操作状態判定手段で検出された際に、一方の操作荷重のみが閾値を超えていれば、片手操作として処理し、操作されていない側の操作量検出手段の出力値を補正する。このため、操作者が左右の操作手段の両方に触れた操作をとっている際、例えば仮に一方の操作手段は手を添えているだけのような操作状態がとられている場合には、これを両手操作ではなく、片手操作として処理することが可能となる。
【0019】
請求項7に記載の発明は、請求項5又は6に記載の左右連動操作装置において、前記操作状態判定手段は、前記荷重センサを前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、前記補正手段は、前記操作状態判定手段で両手操作を検出した際、操作荷重が大きい側の前記操作量検出手段の出力値を荷重が小さい側の前記操作量検出手段の出力値として優先使用することにより、操作荷重が小さい側の前記操作量検出手段の出力値を補正することをその要旨としている。
【0020】
同構成によれば、両方の操作手段が握られている両手操作であることが操作状態判定手段で検出された際には、2つの操作手段のうち、大きな荷重で以て操作されている側の操作量検出手段の出力値を優先使用する。このため、両方の操作手段が操作される状況下で左右の操作量検出手段の出力値に誤差が発生していても、これに対応することが可能となる。また、操作手段の操作有無を荷重センサにより検出するので、操作有無を精度よく検出しつつ、かつ操作者の意志に沿った操作検出も可能となる。
【0021】
請求項8に記載の発明は、請求項1〜7のいずれか一項に記載の左右連動操作装置において、前記操作状態判定手段は、前記操作手段に対する操作有無を検出する操作検出手段を、前記操作手段の両方に各々備え、前記操作量検出手段の出力値と、前記操作検出手段の出力値とを比較することにより、これら部品に関する故障の有無を監視する故障監視手段を備えたことをその要旨としている。
【0022】
同構成によれば、例えば、操作量検出手段から操作量がある旨の出力がありながら、操作検出手段から操作がない旨の出力がある場合には、操作量検出手段と操作検出手段とのどちらかの検出が異常であるとして故障診断を行うことが可能となる。このため、操作検出手段を操作手段に対する操作有無のみならず、故障診断というフェールセーフにも使用することが可能となる。
【発明の効果】
【0023】
本発明によれば、左右の操作手段に各々設けた操作量検出手段から得る出力値においてその誤差を低減させることができる左右連動操作装置を提供することができる。
【図面の簡単な説明】
【0024】
【図1】左右連動操作装置がシートに取り付けられた状態を示す斜視図。
【図2】左右連動操作装置の外観を示す斜視図。
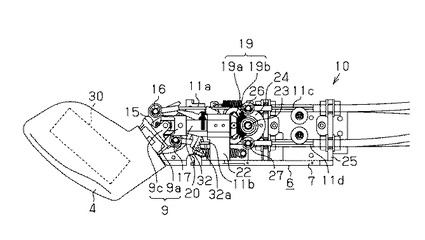
【図3】左グリップの具体的な機械構成を示す正面側からの斜視図。
【図4】左グリップの具体的な機械構成を示す側面図。
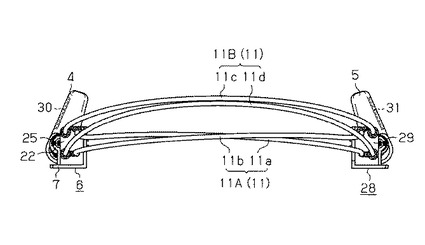
【図5】左右連動操作装置の背面側外観を示す背面図。
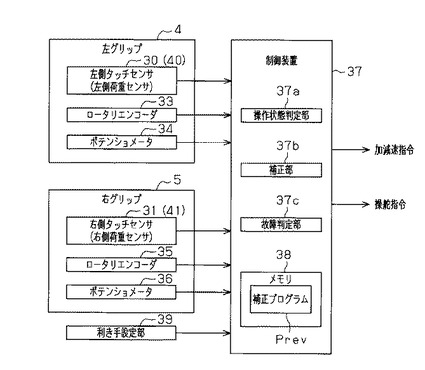
【図6】左右連動操作装置の電気的な構成を示すブロック図。
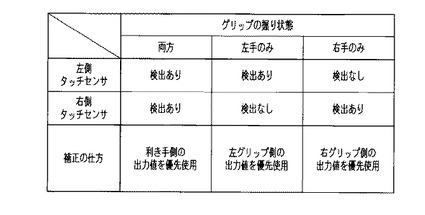
【図7】グリップの握り状態に応じた補正を示す図。
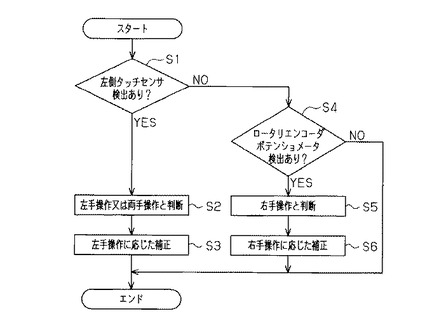
【図8】グリップの握り状態に応じた補正を示すフローチャート。
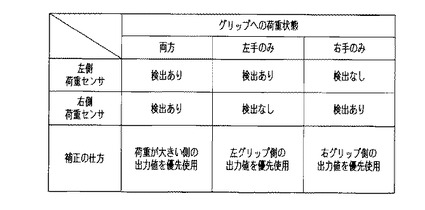
【図9】グリップへの荷重状態に応じた補正を示す図。
【発明を実施するための形態】
【0025】
(第1の実施形態)
以下、本発明を具体化した左右連動操作装置の第1の実施形態を図1〜図7に従って説明する。
【0026】
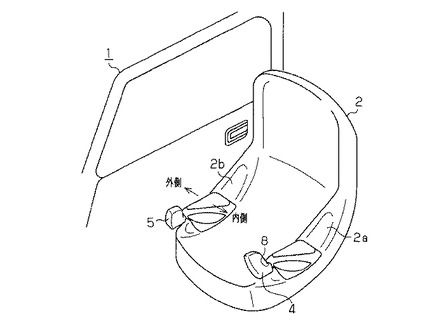
図1に示すように、車両1には、操作者としての運転者が車両1を運転する際に着座する運転席シート2が配設されている。この運転席シート2の左右両側には、運転者が車両1を運転する際に腕を乗せる一対のアームレスト2a,2bが設けられている。これらアームレスト2a,2bは、運転者が運転時において左腕を乗せる箇所として使用する左側アームレスト2aと、運転者が運転時において右腕を乗せる箇所として使用する右側アームレスト2bとからなるとともに、運転者が立ち上がった際にその腰が位置する程度の高さに配置されている。
【0027】
図2に示すように、運転席シート2には、車両1の走行速度や操舵方向等の走行系車両状態を切り換える際に操作する操作系としてグリップ操作式の左右連動操作装置3が設けられている。このグリップ操作式とは、車両運転時において運転席シート2に着座する状態で手を伸ばすことなく操作部位を手元で握り操作することが可能な操作系のことを言う。この左右連動操作装置3を以下に説明すると、左側アームレスト2aには、左手の握り操作部位として使用する左グリップ4が、上下方向(図2の矢印A方向)及び左右方向(図2の矢印B方向)の十字方向に操作可能な状態で取り付けられている。また、右側アームレスト2bには、右手の握り操作部位として使用する右グリップ5が、左グリップ4と同様に上下方向及び左右方向の十字方向に操作可能な状態で取り付けられている。なお、左グリップ4及び右グリップ5が操作手段に相当する。
【0028】
これらグリップ4,5は、上下方向の操作がグリップ4,5を傾斜させる傾斜操作式であるのに対し、左右方向の操作がグリップ4,5を回転させる回転操作式である。本例においては、例えばグリップ4,5を下方(図2の矢印A1方向:以下、下方傾倒操作方向と記す)に傾斜させると車両1が加速し、グリップ4,5を上方(図2の矢印A2方向:以下、上方傾倒操作方向と記す)に傾斜させると車両1が減速する。また、グリップ4,5を左側(図2の矢印B1方向:以下、左側回転操作方向と記す)に回転すると車両1が左旋回し、グリップ4,5を右側(図2の矢印B2方向:以下、右側回転操作方向と記す)に回転すると車両1が右旋回する。
【0029】
図3及び図4に示すように、左側アームレスト2aには、左グリップ4に関係する各種部品群の収納先として左側本体部6が取り付けられている。左側本体部6は、左側アームレスト2aの内部に収納された取り付け状態をとるとともに、ベース部分をなす左側枠体7が複数のネジ等によって左側アームレスト2aに取り付け固定されている。左グリップ4は、この左側本体部6に傾倒及び回転可能な状態で取り付けられ、左側アームレスト2aの内部に左側本体部6を取り付けた際、左側アームレスト2aの前部寄りの位置にある開口孔8(図1参照)から外部に突出する取り付け状態をとる。
【0030】
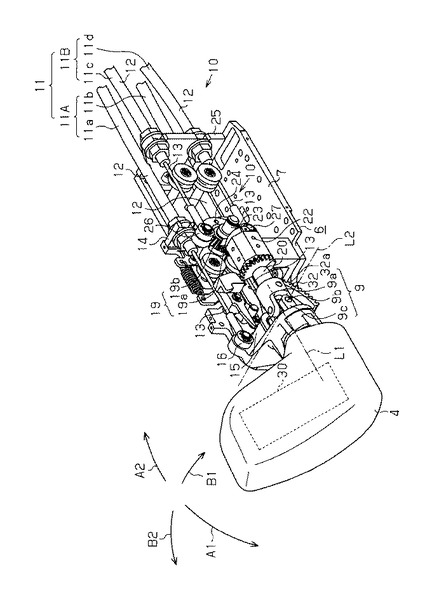
左側枠体7には、回転動作と傾倒動作との両動きを許容する継手としてユニバーサルジョイント9が回動可能に取り付けられている。ユニバーサルジョイント9は、回転運動を許容する駆動ヨーク9aと、この駆動ヨーク9aに軸9bを介して連結されつつ十字型の軸9bを起点に傾斜運動可能な被駆動ヨーク9cとを持ち、被駆動ヨーク9cが左グリップ4に連結されている。このユニバーサルジョイント9は、回転側の駆動ヨーク9aで左グリップ4の左右方向操作を許容し、傾倒側の被駆動ヨーク9cで左グリップ4の上下傾倒操作を許容する。よって、ユニバーサルジョイント9の回転軸心が左グリップ4の左右回転時の軸心(左右軸心L1)となり、ユニバーサルジョイント9の傾倒軸心が左グリップ4の上下傾倒時の軸心(上下軸心L2)となっている。
【0031】
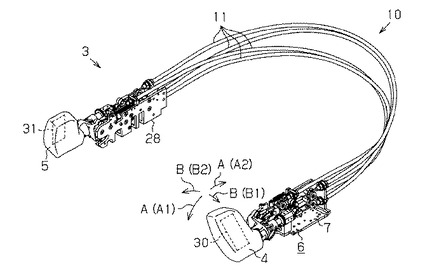
左右連動操作装置3は、これらグリップ4,5のうち一方を操作すると他方もそれに追従する動きをとる左右連動式である。よって、左右連動操作装置3には、左右のグリップ4,5に連動性を持たせるべく機能する連動操作伝達機構10が設けられている。例えば、左グリップ4を下方に傾倒操作すると、右グリップ5も同様に下方に傾倒動作し、左グリップ4を左側に回転操作すると、右グリップ5も同様に左側に回転動作する。これは、右グリップ5を上下方向や左右方向に操作したときも同様である。
【0032】
この連動操作伝達機構10を以下に説明すると、本例の連動操作伝達機構10は、左グリップ4と右グリップ5とを複数のケーブル(ワイヤ)11,11,…で繋ぎ、これらケーブル11,11,…を引き動作で使用することによって、左右のグリップ4,5に連動性を持たせる引き−引きケーブル式である。本例のケーブル11,11,…としては、一本のケーブル線で操作側の引き動作及び押し動作の両方を相手側に伝達することが可能なプッシュプルケーブルを使用している。プッシュプルケーブル11,11,…は、例えば樹脂等からなるアウターケーシング12の内部に、ワイヤ線であるインナーケーブル13が押し引き可能な状態で収納されたケーブル線である。プッシュプルケーブル11,11,…は、インナーケーブル13の一端を左グリップ4に接続し、他端を右グリップ5に接続する取り付け状態をとっている。
【0033】
左グリップ4及び右グリップ5は、プッシュプルケーブル11,11,…の2本を1組とした計2組のケーブル線対11A,11B、即ち4本のプッシュプルケーブル11a〜11dで接続されている。これは、左右のグリップ4,5に連動性を持たせるに際して、この種のプッシュプルケーブル線を引き−引きの動作で使用し、しかもグリップ4,5が上下方向及び左右方向の2方向に操作可能であることから、2組のケーブル線対11A,11B、即ち4本のプッシュプルケーブル11a〜11dで接続されることになる。本例のケーブル線対11A,11Bは、ケーブル線対11A(第1上下操作伝達用プッシュプルケーブル11a,第2上下操作伝達用プッシュプルケーブル11b)が上下方向操作伝達用であり、ケーブル線対11B(第1左右操作伝達用プッシュプルケーブル11c、第2左右操作伝達用プッシュプルケーブル11d)が左右方向操作伝達用である。
【0034】
また、左グリップ4の根元には、左グリップ4が上下方向に傾倒操作された際にこれと同期して動くことが可能で、しかも左グリップ4を左右方向に回転可能に支持するグリップ支持部15が取り付けられている。よって、左グリップ4が上下傾倒操作された際には、グリップ支持部15が左グリップ4と同期して上下方向に回動し、左グリップ4が左右方向に操作された際には、グリップ支持部15は回動せずにユニバーサルジョイント9のみが回動動作する。左グリップ4は、ユニバーサルジョイント9の軸9bを上下軸として上下方向に傾倒動作する。
【0035】
第1上下操作伝達用プッシュプルケーブル11aのインナーケーブル13は、グリップ支持部15において上下軸9bに対しその上部寄りの位置に回動可能な状態で取り付けられた回動継手16を介して、ケーブル左端が左グリップ4に連結されている。
【0036】
また、第2上下操作伝達用プッシュプルケーブル11bは、取付部14にアウターケーシング12の左端部をネジ等により締結固定することで、ケーブル左端が左側枠体7に取り付け固定されている。第2上下操作伝達用プッシュプルケーブル11bのインナーケーブル13は、グリップ支持部15において上下軸9bに対しその下部寄りの位置に回動可能な状態で取り付けられた回動継手17を介して、ケーブル左端が左グリップ4に連結されている。
【0037】
また、第1左右操作伝達用プッシュプルケーブル11c及び第2左右操作伝達用プッシュプルケーブル11dは、入力した回転運動をその回転軸を変換して出力するかさ歯車(ベベルギア)19を介して左グリップ4に連結されている。左かさ歯車19は、円錐状の面に歯を取り付けた駆動歯車19aと従動歯車19bとを90度傾く状態で噛み合わせた歯車であって、左グリップ4が上下傾倒操作された際の傾倒操作力をケーブル線対11Aに入力する時の入力軸(上下軸9b)と、左グリップ4が左右回転操作された際の回転操作力をケーブル線対11Bに入力する時の入力軸とが互いに平行向き状態をとるように働く。本例の左かさ歯車19は、左グリップ4を左右方向に回転操作した際において左グリップ4に左右軸心L1回りに発生する回転力(操作力)を、その回転軸方向を90度変換して上下軸9bに平行する軸回りの回転力に変換し、これを第1左右操作伝達用プッシュプルケーブル11c及び第2左右操作伝達用プッシュプルケーブル11dに伝達する。
【0038】
左かさ歯車19の駆動歯車19aは、ユニバーサルジョイント9の駆動ヨーク9aに同一軸心位置で回転可能な状態で取り付けられた左右軸20に、自身の回転軸である駆動歯車軸が同じく同一軸心をとる状態で取り付け固定されている。左右軸20は、左側枠体7に形成された軸支持部22に回動可能な状態で貫挿支持されている。左かさ歯車19の駆動歯車19aは、左グリップ4が左右回転操作された際、この操作に同期して左右軸心L1回りに回転する。
【0039】
左かさ歯車19の従動歯車19bは、自身の回転軸である従動歯車軸23が左右軸心L1に対して90度傾く、即ち上下軸心L2と平行する向きをとるように配置されている。左かさ歯車19の従動歯車19bには、従動歯車19bと同一軸心回りに一体回転可能な板状の可動片24が取り付けられている。よって、左グリップ4が左右方向に回転操作されて駆動歯車19a及び従動歯車19bが回転すると、可動片24も従動歯車19bに同期して従動歯車19bと同一方向に回転する。
【0040】
第1左右操作伝達用プッシュプルケーブル11cは、左側枠体7の基端位置に配置された板状の取付部25にアウターケーシング12の左端部をネジ等により締結固定することで、ケーブル左端が左側枠体7に取り付け固定されている。第1左右操作伝達用プッシュプルケーブル11cのインナーケーブル13は、可動片24において従動歯車軸23の上部寄りの位置に回動可能な状態で取り付けられた回動継手26を介して、ケーブル左端が可動片24、即ち左グリップ4に連結されている。
【0041】
第2左右操作伝達用プッシュプルケーブル11dは、第1左右操作伝達用プッシュプルケーブル11cと同様に、左側枠体7の取付部25にアウターケーシング12の左端をネジ等により締結固定することで、ケーブル左端が左側枠体7に取り付け固定されている。また、これら4本のプッシュプルケーブル11a〜11dは、左側枠体7において平行する取り付け向きをとっている。第2左右操作伝達用プッシュプルケーブル11dのインナーケーブル13は、可動片24において従動歯車軸23の下部寄りの位置に回動可能な状態で取り付けられた回動継手27を介して、ケーブル左端が可動片24、即ち左グリップ4に連結されている。
【0042】
なお、右グリップ5の連動操作伝達機構10は、部品配置が左右で逆向きとなっていることが大きく異なるのみで、それ以外の基本的な構造は左グリップ4と同様である。即ち、左グリップ4と右グリップ5とを見比べた場合、これらの間の大きな違いは部品配置が左右対称となっていることのみである。よって、右グリップ5の説明は左グリップ4の説明を持って済ますこととし、右グリップ5の説明の詳細については省略する。
【0043】
図5に示すように、4本のプッシュプルケーブル11a〜11dのケーブル左端は、左側本体部6の背面に位置する取付部25から左側本体部6の内部に導入されている。また、4本のプッシュプルケーブル11a〜11dのケーブル右端は、右側本体部28の背面に位置する取付部29から右側本体部28の内部に導入されている。上下操作伝達用プッシュプルケーブル11a,11bを左側本体部6及び右側本体部28へ導入する際の導入位置は、左右で上下が入れ替わっている。これは、左右のグリップ4,5を上下傾倒操作した際に上下軸9b回りに発生する操作力をただ単に相手側に伝達するのみの構造であることが理由である。一方、左右操作伝達用プッシュプルケーブル11c,11dを左側本体部6及び右側本体部28へ導入する際の導入位置が左右で上下が同じなのは、これら左右のケーブル11c,11dが左かさ歯車19を介して接続されているからである。
【0044】
さらに、図2及び図5に示すように、左グリップ4及び右グリップ5の外側には、運転者の手が左グリップ4及び右グリップ5を握っているか否かによって操作を検出する左側タッチセンサ30及び右側タッチセンサ31がそれぞれ設置されている。左側タッチセンサ30及び右側タッチセンサ31は、例えば手が接触することによって静電容量が変化する静電容量センサであって、運転者の手がグリップ4,5に触れているか否かによって運転者の手が各グリップ4,5を握って操作していることを検出し、その検出結果を含む検出信号を出力する。なお、左側タッチセンサ30及び右側タッチセンサ31が操作検出手段として機能する。
【0045】
図3及び図4に示すように、左グリップ支持部15には、左側本体部6側に延びる回動片32が、左グリップ4と同期回転可能な状態で取り付けられている。この回動片32の先端には、ギアとして使用する複数の歯32aが形成されている。また、左側枠体7には、回動片32の歯32aと噛み合い状態をとるギア部が回転可能な状態で取り付けられている。ギア部には、このギア部の回転量を検出するロータリエンコーダ33(図6参照)が取り付けられている。ロータリエンコーダ33は、ギア部の回転量を見ることにより左グリップ4の上下方向の傾倒操作量を検出し、その操作量に応じた検出信号を出力する。
【0046】
また、左グリップ4の左右軸20には、左右軸20の回転量を検出するポテンショメータ34(図6参照)が取り付けられている。ポテンショメータ34は、左右軸20の回転量を見ることにより左グリップ4の左右方向の回転量を検出し、その操作量に応じた検出信号を出力する。なお、左グリップ4の左右方向の回転量検出に際してその信頼性を確保するために、例えば左かさ歯車19の従動歯車軸23に、従動歯車軸23の回転を検出するロータリエンコーダを取り付けて、左グリップ4の操作量検出をロータリエンコーダ33、ポテンショメータ34、このロータリエンコーダによって3重系としてもよい。
【0047】
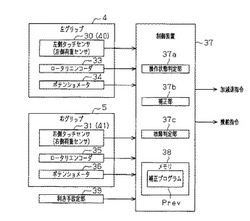
図6に示すように、左右連動操作装置3には、左右連動操作装置3を統括制御するコントロールユニットとして制御装置37が設けられている。この制御装置37は、入力側に左グリップ4の左側タッチセンサ30、ロータリエンコーダ33、及びポテンショメータ34が接続されるとともに、右グリップ5の右側タッチセンサ31、ロータリエンコーダ35、及びポテンショメータ36も接続されている。制御装置37には、メモリ38が設けられている。メモリ38には、これらセンサ群、エンコーダ群やポテンショメータ群から取得する検出信号を基に、各グリップ4,5に対する握り状態に応じてその時々のグリップ4,5の上下方向及び左右方向の操作量を算出する補正プログラムPrevが記憶されている。なお、ロータリエンコーダ33,35及びポテンショメータ34,36が操作量検出手段として機能する。
【0048】
制御装置37は、この補正プログラムPrevに基づいて算出した操作量情報を各種ECUに出力することにより、これらECUに車両1の加減速状態や操舵状態を制御させる。詳しくは、制御装置37は、グリップ4,5が操作された際、グリップ4,5の操作状態を判定する操作状態判定部37aと、操作状態判定部37aの判定結果を基に操作量情報を補正する補正部37bとを機能的に生成する。これら操作状態判定部37a及び補正部37bは、制御装置37が補正プログラムPrevを実行することで機能的に生成するものであって、図6ではこれらをブロック図で表現している。なお、操作状態判定部37aが操作状態判定手段に相当し、補正部37bが補正手段に相当する。
【0049】
また、制御装置37は、運転者の利き手を設定する設定手段としての利き手設定部39が設けられている。この利き手設定部39は、例えばマイクロスイッチ等により機械式のスイッチ操作で切り換えるものや、或いは車内のタッチパネル式ディスプレイを用いて入力設定するものなど、種々の形式のものが採用可能である。また、この利き手設定部39は、運転者が車両に乗車したときに操作することで設定するものでもよいし、或いは運転者ごとに予め設定しておき、IDコード等で判別される運転者に応じて切り替わるものでもよい。
【0050】
次に、本例の左右連動操作装置3の入力操作に対する操作量の出力を図7に従って説明する。
図7に示すように、制御装置37は、まず運転者が左グリップ4及び右グリップ5を握って操作しているか否かを左側タッチセンサ30及び右側タッチセンサ31から出力された検出信号に基づいて判断する。
【0051】
制御装置37の操作状態判定部37aは、左側タッチセンサ30のみから握っている旨の検出信号があった場合には、運転者が左グリップ4のみを握って操作している片手操作と判断する。そして、制御装置37の補正部37bは、ロータリエンコーダ35及びポテンショメータ36の出力値を補正プログラムPrevに基づいて左手のみの片手操作に応じた補正をして操作量を出力する。詳しくは、制御装置37の補正部37bは、グリップの上下方向の傾倒操作では、操作された側である左グリップ4のロータリエンコーダ33の出力値を操作されていない側である右グリップ5のロータリエンコーダ35の出力値として優先使用することにより、右グリップ5の出力値を補正して本装置の操作量として出力する。また、制御装置37の補正部37bは、グリップの左右方向の傾倒操作では、操作された側である左グリップ4のポテンショメータ34からの出力値を操作されていない側である右グリップ5のポテンショメータ36の出力値として優先使用することにより、右グリップ5の出力値を補正して本装置の操作量として出力する。
【0052】
制御装置37の操作状態判定部37aは、右側タッチセンサ31のみから握っている旨の検出信号があった場合には、運転者が右グリップ5のみを握って操作している片手操作と判断する。そして、制御装置37の補正部37bは、ロータリエンコーダ33及びポテンショメータ34の出力値を補正プログラムPrevに基づいて右手のみの片手操作に応じた補正をして操作量を出力する。詳しくは、制御装置37の補正部37bは、グリップの上下方向の傾倒操作では、操作された側である右グリップ5のロータリエンコーダ35の出力値を操作されていない側である左グリップ4のロータリエンコーダ33の出力値として優先使用することにより、右グリップ5の出力値を補正して本装置の操作量として出力する。また、制御装置37の補正部37bは、グリップの左右方向の傾倒操作では、操作された側である右グリップ5のポテンショメータ36からの出力値を操作されていない側である左グリップ4のポテンショメータ34の出力値として優先使用することにより、左グリップ4の出力値を補正して本装置の操作量として出力する。
【0053】
制御装置37の操作状態判定部37aは、左側タッチセンサ30及び右側タッチセンサ31の両方から握っている旨の検出信号があった場合には、運転者が左グリップ4及び右グリップ5の両方を握って操作している両手操作と判断する。そして、制御装置37の補正部37bは、ロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正プログラムPrevに基づいて両手操作に応じた補正をして操作量を出力する。詳しくは、制御装置37の補正部37bは、上下方向の傾倒操作では、左グリップ4のロータリエンコーダ33からの出力値と右グリップ5のロータリエンコーダ35からの出力値とのうち運転者の利き手側の出力値を優先使用することにより、利き手でない側のロータリエンコーダ33,35の出力値を補正して本装置の操作量として出力する。また、制御装置37の補正部37bは、グリップの左右方向の傾倒操作では、左グリップ4のポテンショメータ34からの出力値と右グリップ5のポテンショメータ36からの出力値とのうち運転者の利き手側の出力値を優先使用することにより、利き手でない側のロータリエンコーダ33,35の出力値を補正して本装置の操作量として出力する。
【0054】
また、制御装置37は、左側タッチセンサ30の出力と左グリップ4のロータリエンコーダ33、ポテンショメータ34の出力とを、又は右側タッチセンサ31の出力と右グリップ5のロータリエンコーダ35、ポテンショメータ36の出力とを比較して故障診断を行うことが可能である。詳しくは、制御装置37は、グリップ4,5が操作された際、これらセンサ類を故障判定補正する故障判定部37cを機能的に生成する。制御装置37の故障判定部37cは、例えば左側タッチセンサ30に握りを検出する検出信号の出力がない状態で、左グリップ4のロータリエンコーダ33、ポテンショメータ34から出力がある場合には、左側タッチセンサ30、又は左グリップ4のロータリエンコーダ33、左グリップ4のポテンショメータ34のいずれかが故障している可能性があると判断する。なお、右側においても同様に行うことによって故障診断を行うことが可能である。故障判定部37cが故障監視手段として機能する。
【0055】
さて、本例においては、左側タッチセンサ30及び右側タッチセンサ31によりグリップ4,5の操作有無を監視し、これらグリップ4,5の一方のみ操作された片手操作時の際には、操作されている側のグリップ4,5から出力されるセンサ出力値を、最終的に制御装置37から他ECUに出力されるグリップ操作量として優先使用する。このため、片手操作の際に、例えばギアやプッシュプルケーブルのバックラッシュやクリアランス等によって2つのグリップ4,5の操作量の出力値に差が発生したとしても、この出力差をグリップ操作量として他ECUに出力させずに済む。よって、操作精度の低下が抑制され、装置としての機能性を高いものとすることが可能となる。
【0056】
以上、説明した実施形態によれば、以下の作用効果を奏することができる。
(1)グリップ4,5の片手操作が制御装置37の操作状態判定部37aによって監視され、片手操作が検出された際には、操作されていない側のグリップ4,5に設けられた非操作側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値が制御装置37の補正部37bによって補正される。ところで、片手操作の際には、連動操作伝達機構10に生じるバックラッシュやクリアランス等を原因として、非操作側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値が、操作側のロータリエンコーダ33,35及びポテンショメータ34,36である操作側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値に対して誤差を持って出力されることもある。こうなると、左右のロータリエンコーダ33,35及びポテンショメータ34,36の出力値に誤差が生じ、正確な操作量検出に支障を来す。しかし、本構成の場合は、片手操作の際には、非操作側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値が操作側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値に近づくように補正されるので、左右の出力誤差を低く抑えることが可能となる。
【0057】
(2)操作検出手段として左側タッチセンサ30及び右側タッチセンサ31を使用するので、操作者によってグリップ4,5が操作されているか否かを、操作者がグリップ4,5に触れているか否かによって検出することが可能となる。このように、グリップ4,5の操作有無を、単なるグリップ4,5への手等の接触により操作有無を検出することが可能となれば、グリップ4,5の片手操作を速やかに検出することが可能となる。
【0058】
(3)2つのロータリエンコーダ33,35及びポテンショメータ34,36の出力値のうち、片手操作された側の出力値を優先使用するという簡単な方式によって、非操作側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正することが可能となる。
【0059】
(4)操作者がグリップ4,5を操作する際には、少なからず利き手側のグリップ4,5に、これと反対側のグリップ4,5よりも大きい操作力が加えられる傾向があり、このような操作によって左右のセンサ出力に誤差が発生する可能性がある。そこで、両方のグリップ4,5が握られている両手操作であることが制御装置37の操作状態判定部37aで検出された際には、操作者の利き手側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値を優先使用する。このため、両方のグリップ4,5が操作される状況下で左右のロータリエンコーダ33,35及びポテンショメータ34,36の出力値に誤差が発生していても、これに対応することが可能となる。
【0060】
(5)ロータリエンコーダ33,35及びポテンショメータ34,36から操作量がある旨の出力がありながら、タッチセンサ30,31から操作がない旨の出力がある場合には、ロータリエンコーダ33,35及びポテンショメータ34,36とタッチセンサ30,31とのどちらかの検出が異常であるとして故障診断を行うことが可能となる。このため、タッチセンサ30,31をグリップ4,5に対する操作有無のみならず、故障診断というフェールセーフにも使用することが可能となる。
【0061】
(第2の実施形態)
以下、本発明を具体化した左右連動操作装置の第2の実施形態を図8に従って説明する。この実施形態の左右連動操作装置は、右側タッチセンサ31を省略し、左側タッチセンサ30のみを設ける点、及びそれに伴う制御装置37の操作量の補正が上記第1の実施形態と異なっている。以下、第1の実施形態との相違点を中心に説明する。なお、この実施形態の左右連動操作装置は、第1の実施形態の左右連動操作装置とほぼ同様の構成を備えている。
【0062】
本実施形態では、片側にのみタッチセンサを設けるため、左側タッチセンサ30に加えて、ロータリエンコーダ33,35及びポテンショメータ34,36が操作検出手段として機能する。制御装置37の操作状態判定部37aは、運転者が左グリップ4及び右グリップ5を握って操作しているか否かを左側タッチセンサ30に加えて、ロータリエンコーダ33,35及びポテンショメータ34,36から出力された出力信号に基づいて判断する。
【0063】
図8に示すように、制御装置37の操作状態判定部37aは、左側タッチセンサ30から握っている旨の検出信号があった場合(ステップS1:YES)には、このときの操作が左手のみの片手操作又は両手操作のどちらかであると判断する(ステップS2)。ここで、グリップ操作有無を見るタッチセンサは左グリップ4のみにしか設けられていないため、制御装置37はこのときの握り操作を左手のみの片手操作又は両手操作のどちらかであることまでの判断しかできないが、左グリップ4が握り操作されていることは事実である。よって、このときは、左グリップ4から得るセンサ出力を優先使用する。即ち、制御装置37の補正部37bは、ロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正プログラムPrevに基づいて左手のみの片手操作に応じた補正をして操作量を出力する(ステップS3)。詳しくは、制御装置37の補正部37bは、グリップ4,5の上下方向の傾倒操作では、操作された側である左グリップ4のロータリエンコーダ33の出力値を操作されていない側である右グリップ5のロータリエンコーダ35の出力値として優先使用することにより、右グリップ5の出力値を補正して本装置の操作量として出力する。また、制御装置37の補正部37bは、グリップ4,5の左右方向の傾倒操作では、操作された側である左グリップ4のポテンショメータ34からの出力値を操作されていない側である右グリップ5のポテンショメータ36の出力値として優先使用することにより、右グリップ5の出力値を補正して本装置の操作量として出力する。
【0064】
制御装置37の操作状態判定部37aは、左側タッチセンサ30から握っている旨の検出信号がない(ステップS1:NO)にもかかわらず、ロータリエンコーダ33,35及びポテンショメータ34,36から出力がある場合(ステップS4:YES)には、右手のみの片手操作と判断する(ステップS5)。そして、制御装置37の補正部37bは、ロータリエンコーダ33,35及びポテンショメータ34,36の出力値を右手のみの片手操作に応じた補正をして操作量を出力する(ステップS6)。詳しくは、制御装置37の補正部37bは、グリップ4,5の上下方向の傾倒操作では、操作された側である右グリップ5のロータリエンコーダ35の出力値を操作されていない側である左グリップ4のロータリエンコーダ33の出力値として優先使用することにより、右グリップ5の出力値を補正して本装置の操作量として算出して出力する。また、グリップ4,5の左右方向の傾倒操作では、操作された側である右グリップ5のポテンショメータ36からの出力値を操作されていない側である左グリップ4のポテンショメータ34の出力値として優先使用することにより、左グリップ4の出力値を補正して本装置の操作量として算出して出力する。
【0065】
以上、説明した実施形態によれば、第1の実施形態の(1)の作用効果に加え、以下の作用効果を奏することができる。
(6)操作検出手段として左側タッチセンサ30が設けられるため、操作者がグリップ4,5に触れているか否かを検出することで片手操作時にどちらのグリップ4,5を操作しているか速やかに検出することができる。また、グリップ操作有無を見るタッチセンサをグリップの片側にのみ設ければ済むので、センサに要する部品数及び部品コストを低く抑えることができる。
【0066】
(7)片方のグリップ4,5のみが握られている片手操作であることが左側タッチセンサ30、ロータリエンコーダ33,35、及びポテンショメータ34,36の出力によって検出された際には、制御装置37は運転者に操作されたグリップ4,5側のロータリエンコーダ33,35及びポテンショメータ34,36の出力結果を操作量として出力する。このため、正確な出力が得られる操作されているグリップ4,5の出力結果を操作量とすることで正確な操作量を出力することができる。
【0067】
(第3の実施形態)
以下、本発明を具体化した左右連動操作装置の第3の実施形態を図6及び図9に従って説明する。この実施形態の左右連動操作装置は、左側タッチセンサ30及び右側タッチセンサ31に代えて荷重センサを各グリップ支持部15に設ける点、及びそれに伴う制御装置37の操作量の補正が上記第1の実施形態と異なっている。以下、第1の実施形態との相違点を中心に説明する。なお、この実施形態の左右連動操作装置は、第1の実施形態の左右連動操作装置とほぼ同様の構成を備えている。
【0068】
図6に示すように、左右連動操作装置3の各グリップ4,5を支持するグリップ支持部15には、運転者がグリップ4,5を操作する際に掛かる荷重を検出する荷重センサ40,41が設けられている。荷重センサ40,41は、例えばロードセルを用い、荷重の有無だけでなくその量も検出し、検出信号を出力する。なお、荷重センサ40,41が操作検出手段として機能する。
【0069】
制御装置37の操作状態判定部37aは、まず運転者が左グリップ4及び右グリップ5を操作しているか否かを左側荷重センサ及び右側荷重センサから出力された検出信号に基づいて判断する。
【0070】
図9に示すように、制御装置37の操作状態判定部37aは、左側荷重センサ40のみから操作している旨の検出信号があった場合には、運転者が左グリップ4のみを操作している片手操作と判断する。そして、制御装置37の補正部37bは、ロータリエンコーダ33,35及びポテンショメータ34,36の出力値を左手のみの片手操作に応じた補正をして操作量を出力する。詳しくは、制御装置37の補正部37bは、グリップの上下方向の傾倒操作では、左グリップ4のロータリエンコーダ33の出力を本装置の操作量として算出して出力する。また、制御装置37の補正部37bは、グリップの左右方向の傾倒操作では、左グリップ4のポテンショメータ34からの出力を本装置の操作量として算出して出力する。
【0071】
制御装置37の操作状態判定部37aは、右側荷重センサ41のみから操作している旨の検出信号があった場合には、運転者が右グリップ5のみを操作している片手操作と判断する。そして、制御装置37の補正部37bは、ロータリエンコーダ33,35及びポテンショメータ34,36の出力値を右手のみの片手操作に応じた補正をして操作量を出力する。詳しくは、制御装置37の補正部37bは、グリップの上下方向の傾倒操作では、右グリップ5のロータリエンコーダ35の出力を本装置の操作量として算出して出力する。また、制御装置37の補正部37bは、グリップの左右方向の傾倒操作では、右グリップ5のポテンショメータ36からの出力を本装置の操作量として算出して出力する。
【0072】
制御装置37の操作状態判定部37aは、左側荷重センサ40及び右側荷重センサ41の両方から操作している旨の検出信号があった場合には、このときの操作が片手操作及び両手操作のどちらであるかを判定する。即ち、操作状態判定部37aは、両荷重センサ40,41のセンサ出力のうち一方のセンサ出力のみが閾値を超える場合には、もう一方側のグリップはただ手が添えられているだけの片手操作として処理する。そして、操作状態判定部37aは、前述した片手操作時に行うセンサ出力の補正を実行する。
【0073】
また、操作状態判定部37aは、両荷重センサ40,41のセンサ出力がともに閾値を超える場合、このときの操作を両手操作として処理する。そして、制御装置37の補正部37bは、ロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正プログラムPrevに基づいて両手操作に応じた補正をして操作量を出力する。詳しくは、制御装置37の補正部37bは、上下方向の傾倒操作では、操作荷重が大きい側のロータリエンコーダ33,35の出力値を操作荷重が小さい側のロータリエンコーダ33,35の出力値として優先使用することにより、操作荷重が小さい側のロータリエンコーダ33,35の出力値を補正して本装置の操作量として出力する。また、制御装置37の補正部37bは、グリップの左右方向の傾倒操作では、操作荷重が大きい側のポテンショメータ34,36の出力値を操作荷重が小さい側のポテンショメータ34,36の出力値として優先使用することにより、操作荷重が小さい側のポテンショメータ34,36の出力値を補正して本装置の操作量として出力する。
【0074】
さて、左側荷重センサ40及び右側荷重センサ41が設けられるため、操作者が左グリップ4及び右グリップ5にどれくらいの荷重を掛けて操作しているか否かを検出し、片手操作時にどちらのグリップ4,5を操作しているか、又は両手操作時にどちらかに偏った操作力が加えられているかを速やかに検出することができる。また、両手操作時に両側に同じ操作力が加えられない場合に、他方より大きい荷重が検出されたグリップ4,5に他方より大きい操作力が加えられているグリップ4,5を検出することができ、荷重量に応じて加重平均を算出する等の補正をして操作量を出力する。このため、片手操作時のグリップ4,5に対する荷重からどちらのグリップ4,5を操作しているかだけでなく、両手操作時のどちらのグリップ4,5にどれだけの操作力が加えられているかを検出することができ、この検出結果に基づいて出力値を補正するため、片手操作時及び両手操作時の出力誤差を抑制して出力することができる。
【0075】
以上、説明した実施形態によれば、第1の実施形態の(1)の作用効果に加え、以下の作用効果を奏することができる。
(8)操作検出手段として荷重センサを使用するので、操作者がグリップ4,5にどの程度の荷重をかけているかにより、グリップ4,5に対する操作有無が検出される。このため、グリップ4,5を操作する意志があるときには、グリップ4,5に大きな荷重が加えられるはずであるから、グリップ4,5の操作有無をグリップ4,5にかかる荷重で検出するようにすれば、グリップ4,5の片手操作有無を、より精度よく検出することが可能となる。
【0076】
(9)両方のグリップ4,5が握られている両手操作であることが操作状態判定部37aで検出された際に、一方の操作荷重のみが閾値を超えていれば、片手操作として処理し、操作されていない側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正する。このため、操作者が左右のグリップ4,5の両方に触れた操作をとっている際、例えば仮に一方のグリップ4,5は手を添えているだけのような操作状態がとられている場合には、これを両手操作ではなく、片手操作として処理することが可能となる。
【0077】
(10)両方のグリップ4,5が握られている両手操作であることが制御装置37の操作状態判定部37aで検出された際には、2つのグリップ4,5のうち、大きな荷重で以て操作されている側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値を優先使用する。このため、両方のグリップ4,5が操作される状況下で左右のロータリエンコーダ33,35及びポテンショメータ34,36の出力値に誤差が発生していても、これに対応することが可能となる。また、グリップ4,5の操作有無を荷重センサにより検出するので、両手操作であっても片手が手を添えているだけのような片手操作と変わらない場合にも、操作有無を精度よく検出しつつ、かつ操作者の意志に沿った操作検出も可能となる。
【0078】
なお、上記実施形態は、これを適宜変更した以下の形態にて実施することができる。
・上記実施形態において、グリップ4,5の上下方向の傾倒操作をロータリエンコーダ33,35、及び左右方向の傾倒操作をポテンショメータ34,36を用いて検出したが、両方をロータリエンコーダにしたり、ポテンショメータにしたり、他のセンサを用いてもよい。また、センサの数量を任意に変更してもよい。
【0079】
・上記実施形態において、制御装置37は、グリップ側に設けても、車両側に搭載してもどちらでもよい。
・第1の実施形態では、両手操作に応じた補正として利き手側の出力値を優先使用することにより、利き手でない側の出力値を補正するようにしたが、右側の出力値と左側の出力値との平均値を算出する補正を両手操作に応じた補正としてもよい。また、センサ出力の補正方式は、出力の一方の優先や、平均値の算出に限らず、左右のセンサ出力の誤差を小さく抑えられるものであれば、特に限定されない。
【0080】
・第1の実施形態及び第2の実施形態では、左側タッチセンサ30及び右側タッチセンサ31は、例えば手が接触することによって静電容量が変化する静電容量センサとしたが、圧力センサ等のその他のセンサとしてもよい。
【0081】
・第2の実施形態において、右側タッチセンサ31を省略し、左側タッチセンサ30のみを設けるようにしたが、左側タッチセンサ30を省略し、右側タッチセンサ31のみを設けるようにしてもよい。
【0082】
・第1の実施形態において、故障診断を行うようにしたが、第3の実施形態でも行ってもよい。また、上記実施形態において、故障診断を行わないようにしてもよい。
・第1の実施形態において、例えばタッチセンサ30,31のタッチ検出範囲(手の接触範囲)を見ることにより、グリップ4、5を両手で触れているものの片側は手を添えただけの操作状態の片手操作を検出してもよい。
【0083】
・第3の実施形態において、片手操作及び両手操作の両方とも、荷重の大きい側を優先使用することに限定されない。例えば、片手操作の際には、荷重の大きい側のセンサ出力値を優先使用するものの、両手操作の際には、第1の実施形態のように、利き手側のセンサ出力を優先使用する形式をとってもよい。
【0084】
・第1〜第3の実施形態において、グリップ4,5の握りを検出するセンサは、必ずしもタッチセンサや荷重センサに限らず、他の種々のセンサが使用可能である。また、片手操作や両手操作の検出方式も、使用するセンサに合わせて種々の方式を採用することが可能である。
【0085】
次に、前記実施形態から把握できる技術的思想をその効果と共に記載する。
(a)請求項1〜4のいずれか一項に記載の左右連動操作装置において、前記操作状態判定手段は、前記操作手段に対する操作有無の検出が可能な操作検出手段を、前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、前記補正手段は、前記操作状態判定手段で両手操作を検出した際、両方の同操作手段の前記操作量検出手段の出力結果の平均値を操作量として出力することを特徴とする左右連動操作装置。
【0086】
同構成によれば、両方の操作手段が握られている両手操作であることが操作状態判定手段で検出された際には、両方の操作手段の操作量検出手段の出力結果の平均値を操作量として出力する。このため、例えば、左右の操作量検出手段で誤差があった際に、平均値を採用することで誤差のある側の出力結果を採用したときと比べて誤差を半分にすることができ、より正確な操作量を出力することができる。
【符号の説明】
【0087】
L1…左右軸心、L2…上下軸心、Prev…補正プログラム、1…車両、2…運転席シート、3…左右連動操作装置、4…左グリップ、5…右グリップ、6…左側本体部、7…左側枠体、8…開口孔、9…ユニバーサルジョイント、10…連動操作伝達機構、11…プッシュプルケーブル、12…アウターケーシング、13…インナーケーシング、14…取付部、15…グリップ支持部、16,17…回動継手、19…かさ歯車、20…左右軸、22…軸支持部、23…従動歯車軸、24…可動片、25…左側取付部、26,27…回動継手、28…左側本体部、29…右側取付部、30…左側タッチセンサ、31…右側タッチセンサ、32…回動片、33,35…ロータリエンコーダ、34,36…ポテンショメータ、37…制御装置、37a…操作状態判定部、37b…補正部、37c…故障判定部、38…メモリ、39…利き手設定部、40…左側荷重センサ、41…右側荷重センサ。
【技術分野】
【0001】
この発明は、各種装置や機器を動作させる際の操作系として運転者が握り操作するグリップが操作者の左右両側に存在するとともにこれら左右グリップが連動して動く左右連動操作装置に関する。
【背景技術】
【0002】
従来、運転者がハンドル等の走行操作装置を操作して運転走行する際に、この運転者にかかる疲労を低減する技術が種々開発されている。その一技術としては、走行操作装置の操作箇所であるグリップに加減速操作系と操舵操作系との両方を集約し、1つのグリップを操作することのみで車両の加減速操作及び操舵操作を可能とする技術がある(例えば、特許文献1参照)。この技術を使用すれば、手によるグリップ操作(レバー操作)のみで車両の加減速操作及び操舵操作の両方を行うことが可能となるので、車両操作時において脚の操作が不要となる。よって、運転操作において脚操作が不要となる分だけ運転操作が楽になるので、運転操作を疲労のかかり難いものとすることが可能となる。
【0003】
また、この種の走行操作装置としては、例えば運転席の左右両側にグリップを配置してこれらに連動性を持たせる左右連動操作装置というものも開発されている。この左右連動操作装置は、左右のグリップのうち一方を操作すると、他方のグリップも同様の操作方向に動く動作をとる操作装置である。このように、運転席の左右にグリップを配置するのは、車両運転中に例えば仮に一方の手が使用できない状態となっても、もう片方の手で車両の走行操作ができるようにするためである。左右のグリップは、例えば一例としてプッシュプルケーブルによって連結され、このプッシュプルケーブルの押し−引きを利用してグリップ操作を他方に伝達することによって左右が連動する。このグリップ操作の操作量は、各々のグリップにセンサを設けて、このセンサからの出力値によってグリップ操作量が検出される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−258959号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、この種の左右連動操作装置では、ギアやプッシュプルケーブル等によってグリップ操作を伝達する際に、ギアやプッシュプルケーブル等のバックラッシュやクリアランス等によって完全に誤差なく連動させることができない現状がある。そして、例えば車両運転中に片方の手で走行操作すると、走行操作されていない非操作グリップ側のセンサ出力が上記誤差のために走行操作されている操作グリップ側のセンサ出力よりも若干少なくなる場合がある。このため、操作者が片手操作を行った際、操作グリップ側のセンサ出力は100%の値をとるものの、非操作グリップ側のセンサ出力が100%に満たない値をとることがあり、左右のセンサ出力で誤差が生じる問題があった。
【0006】
この発明は、こうした実情に鑑みてなされたものであり、その目的は、左右の操作手段に各々設けた操作量検出手段から得る出力値においてその誤差を低減させることができる左右連動操作装置を提供することにある。
【課題を解決するための手段】
【0007】
以下、上記目的を達成するための手段及びその作用効果について説明する。
請求項1に記載の発明は、操作者が手にする操作箇所として操作手段が前記操作者の左右両側に一対配置され、一方に生じた操作力を他方に連動性を持って伝達可能な連動操作伝達機構により、2つの前記操作手段のうち一方を操作すると他方もそれに追従するように同方向に連動して動き、2つの前記操作手段の各々の操作量を、各々の前記操作手段に設けた操作量検出手段によって検出する左右連動操作装置において、操作者による2つの前記操作手段の操作状態を判定する操作状態判定手段と、前記操作状態判定手段によって片手操作を検出した際、操作されていない側の前記操作手段に設けられた前記操作量検出手段である非操作側操作量検出手段の出力値を補正する補正手段とを備えたことをその要旨としている。
【0008】
同構成によれば、操作手段の片手操作が操作状態判定手段によって監視され、片手操作が検出された際には、操作されていない側の操作手段に設けられた非操作側操作量検出手段の出力値が補正手段によって補正される。ところで、片手操作の際には、連動操作伝達機構に生じるバックラッシュやクリアランス等を原因として、非操作側操作量検出手段の出力値が、操作側の操作量検出手段である操作側操作量検出手段の出力値に対して誤差を持って出力されることもある。こうなると、左右の操作量検出手段の出力値に誤差が生じ、正確な操作量検出に支障を来す。しかし、本構成の場合は、片手操作の際には、非操作側操作量検出手段の出力値が操作側操作量検出手段の出力値に近づくように補正されるので、左右の出力誤差を低く抑えることが可能となる。
【0009】
請求項2に記載の発明は、請求項1に記載の左右連動操作装置において、前記操作状態判定手段は、前記操作手段に対する操作有無を検出する操作検出手段として、同操作手段への接触有無を検出するタッチセンサを使用したことをその要旨としている。
【0010】
同構成によれば、操作検出手段としてタッチセンサを使用するので、操作者によって操作手段が操作されているか否かを、操作者が操作手段に触れているか否かによって検出することが可能となる。このように、操作手段の操作有無を、単なる操作手段への手等の接触により操作有無を検出することが可能となれば、操作手段の片手操作を速やかに検出することが可能となる。
【0011】
請求項3に記載の発明は、請求項1又は2に記載の左右連動操作装置において、前記補正手段は、前記片手操作が発生した際、片手操作された側の前記操作手段の前記操作量検出手段である操作側操作量検出手段の出力値を、前記非操作側操作量検出手段の出力値として優先使用することにより、前記非操作側操作量検出手段の出力値を補正することをその要旨としている。
【0012】
同構成によれば、2つの操作量検出手段の出力値のうち、片手操作された側の出力値を優先使用するという簡単な方式によって、非操作側操作量検出手段の出力値を補正することが可能となる。
【0013】
請求項4に記載の発明は、請求項1〜3のいずれか一項に記載の左右連動操作装置において、2つの前記操作手段のうち、どちらが利き手側のものであるのかを設定する設定手段を備え、前記操作状態判定手段は、前記操作手段に対する操作有無の検出が可能な操作検出手段を、前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、前記補正手段は、前記操作状態判定手段で両手操作を検出した際、操作者の利き手側の前記操作量検出手段の出力値を優先使用することにより、利き手でない側の前記操作量検出手段の出力値を補正することをその要旨としている。
【0014】
ところで、操作者が操作手段を操作する際には、少なからず利き手側の操作手段に、これと反対側の操作手段よりも大きい操作力が加えられる傾向があり、このような操作によって左右のセンサ出力に誤差が発生する可能性がある。そこで、上記構成によれば、両方の操作手段が握られている両手操作であることが操作状態判定手段で検出された際には、操作者の利き手側の操作量検出手段の出力値を優先使用する。このため、両方の操作手段が操作される状況下で左右の操作量検出手段の出力値に誤差が発生していても、これに対応することが可能となる。
【0015】
請求項5に記載の発明は、請求項1に記載の左右連動操作装置において、前記操作状態判定手段は、前記操作手段に対する操作有無を検出する操作検出手段として、前記操作手段自身にかかる荷重を検出する荷重センサを使用したことをその要旨としている。
【0016】
同構成によれば、操作検出手段として荷重センサを使用するので、操作者が操作手段にどの程度の荷重をかけているかにより、操作手段に対する操作有無が検出される。このため、操作手段を操作する意志があるときには、操作手段に大きな荷重が加えられるはずであるから、操作手段の操作有無を操作手段にかかる荷重で検出するようにすれば、操作手段の片手操作有無を、より精度よく検出することが可能となる。
【0017】
請求項6に記載の発明は、請求項5に記載の左右連動操作装置において、前記操作状態判定手段は、前記荷重センサを前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、前記補正手段は、前記操作状態判定手段で両手操作を検出した際、一方の操作荷重のみが閾値を超えていれば、当該両手操作を片手操作として処理し、操作されていない側の前記操作手段の前記操作量検出手段である非操作側操作量検出手段の出力値を補正することをその要旨としている。
【0018】
同構成によれば、両方の操作手段が握られている両手操作であることが操作状態判定手段で検出された際に、一方の操作荷重のみが閾値を超えていれば、片手操作として処理し、操作されていない側の操作量検出手段の出力値を補正する。このため、操作者が左右の操作手段の両方に触れた操作をとっている際、例えば仮に一方の操作手段は手を添えているだけのような操作状態がとられている場合には、これを両手操作ではなく、片手操作として処理することが可能となる。
【0019】
請求項7に記載の発明は、請求項5又は6に記載の左右連動操作装置において、前記操作状態判定手段は、前記荷重センサを前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、前記補正手段は、前記操作状態判定手段で両手操作を検出した際、操作荷重が大きい側の前記操作量検出手段の出力値を荷重が小さい側の前記操作量検出手段の出力値として優先使用することにより、操作荷重が小さい側の前記操作量検出手段の出力値を補正することをその要旨としている。
【0020】
同構成によれば、両方の操作手段が握られている両手操作であることが操作状態判定手段で検出された際には、2つの操作手段のうち、大きな荷重で以て操作されている側の操作量検出手段の出力値を優先使用する。このため、両方の操作手段が操作される状況下で左右の操作量検出手段の出力値に誤差が発生していても、これに対応することが可能となる。また、操作手段の操作有無を荷重センサにより検出するので、操作有無を精度よく検出しつつ、かつ操作者の意志に沿った操作検出も可能となる。
【0021】
請求項8に記載の発明は、請求項1〜7のいずれか一項に記載の左右連動操作装置において、前記操作状態判定手段は、前記操作手段に対する操作有無を検出する操作検出手段を、前記操作手段の両方に各々備え、前記操作量検出手段の出力値と、前記操作検出手段の出力値とを比較することにより、これら部品に関する故障の有無を監視する故障監視手段を備えたことをその要旨としている。
【0022】
同構成によれば、例えば、操作量検出手段から操作量がある旨の出力がありながら、操作検出手段から操作がない旨の出力がある場合には、操作量検出手段と操作検出手段とのどちらかの検出が異常であるとして故障診断を行うことが可能となる。このため、操作検出手段を操作手段に対する操作有無のみならず、故障診断というフェールセーフにも使用することが可能となる。
【発明の効果】
【0023】
本発明によれば、左右の操作手段に各々設けた操作量検出手段から得る出力値においてその誤差を低減させることができる左右連動操作装置を提供することができる。
【図面の簡単な説明】
【0024】
【図1】左右連動操作装置がシートに取り付けられた状態を示す斜視図。
【図2】左右連動操作装置の外観を示す斜視図。
【図3】左グリップの具体的な機械構成を示す正面側からの斜視図。
【図4】左グリップの具体的な機械構成を示す側面図。
【図5】左右連動操作装置の背面側外観を示す背面図。
【図6】左右連動操作装置の電気的な構成を示すブロック図。
【図7】グリップの握り状態に応じた補正を示す図。
【図8】グリップの握り状態に応じた補正を示すフローチャート。
【図9】グリップへの荷重状態に応じた補正を示す図。
【発明を実施するための形態】
【0025】
(第1の実施形態)
以下、本発明を具体化した左右連動操作装置の第1の実施形態を図1〜図7に従って説明する。
【0026】
図1に示すように、車両1には、操作者としての運転者が車両1を運転する際に着座する運転席シート2が配設されている。この運転席シート2の左右両側には、運転者が車両1を運転する際に腕を乗せる一対のアームレスト2a,2bが設けられている。これらアームレスト2a,2bは、運転者が運転時において左腕を乗せる箇所として使用する左側アームレスト2aと、運転者が運転時において右腕を乗せる箇所として使用する右側アームレスト2bとからなるとともに、運転者が立ち上がった際にその腰が位置する程度の高さに配置されている。
【0027】
図2に示すように、運転席シート2には、車両1の走行速度や操舵方向等の走行系車両状態を切り換える際に操作する操作系としてグリップ操作式の左右連動操作装置3が設けられている。このグリップ操作式とは、車両運転時において運転席シート2に着座する状態で手を伸ばすことなく操作部位を手元で握り操作することが可能な操作系のことを言う。この左右連動操作装置3を以下に説明すると、左側アームレスト2aには、左手の握り操作部位として使用する左グリップ4が、上下方向(図2の矢印A方向)及び左右方向(図2の矢印B方向)の十字方向に操作可能な状態で取り付けられている。また、右側アームレスト2bには、右手の握り操作部位として使用する右グリップ5が、左グリップ4と同様に上下方向及び左右方向の十字方向に操作可能な状態で取り付けられている。なお、左グリップ4及び右グリップ5が操作手段に相当する。
【0028】
これらグリップ4,5は、上下方向の操作がグリップ4,5を傾斜させる傾斜操作式であるのに対し、左右方向の操作がグリップ4,5を回転させる回転操作式である。本例においては、例えばグリップ4,5を下方(図2の矢印A1方向:以下、下方傾倒操作方向と記す)に傾斜させると車両1が加速し、グリップ4,5を上方(図2の矢印A2方向:以下、上方傾倒操作方向と記す)に傾斜させると車両1が減速する。また、グリップ4,5を左側(図2の矢印B1方向:以下、左側回転操作方向と記す)に回転すると車両1が左旋回し、グリップ4,5を右側(図2の矢印B2方向:以下、右側回転操作方向と記す)に回転すると車両1が右旋回する。
【0029】
図3及び図4に示すように、左側アームレスト2aには、左グリップ4に関係する各種部品群の収納先として左側本体部6が取り付けられている。左側本体部6は、左側アームレスト2aの内部に収納された取り付け状態をとるとともに、ベース部分をなす左側枠体7が複数のネジ等によって左側アームレスト2aに取り付け固定されている。左グリップ4は、この左側本体部6に傾倒及び回転可能な状態で取り付けられ、左側アームレスト2aの内部に左側本体部6を取り付けた際、左側アームレスト2aの前部寄りの位置にある開口孔8(図1参照)から外部に突出する取り付け状態をとる。
【0030】
左側枠体7には、回転動作と傾倒動作との両動きを許容する継手としてユニバーサルジョイント9が回動可能に取り付けられている。ユニバーサルジョイント9は、回転運動を許容する駆動ヨーク9aと、この駆動ヨーク9aに軸9bを介して連結されつつ十字型の軸9bを起点に傾斜運動可能な被駆動ヨーク9cとを持ち、被駆動ヨーク9cが左グリップ4に連結されている。このユニバーサルジョイント9は、回転側の駆動ヨーク9aで左グリップ4の左右方向操作を許容し、傾倒側の被駆動ヨーク9cで左グリップ4の上下傾倒操作を許容する。よって、ユニバーサルジョイント9の回転軸心が左グリップ4の左右回転時の軸心(左右軸心L1)となり、ユニバーサルジョイント9の傾倒軸心が左グリップ4の上下傾倒時の軸心(上下軸心L2)となっている。
【0031】
左右連動操作装置3は、これらグリップ4,5のうち一方を操作すると他方もそれに追従する動きをとる左右連動式である。よって、左右連動操作装置3には、左右のグリップ4,5に連動性を持たせるべく機能する連動操作伝達機構10が設けられている。例えば、左グリップ4を下方に傾倒操作すると、右グリップ5も同様に下方に傾倒動作し、左グリップ4を左側に回転操作すると、右グリップ5も同様に左側に回転動作する。これは、右グリップ5を上下方向や左右方向に操作したときも同様である。
【0032】
この連動操作伝達機構10を以下に説明すると、本例の連動操作伝達機構10は、左グリップ4と右グリップ5とを複数のケーブル(ワイヤ)11,11,…で繋ぎ、これらケーブル11,11,…を引き動作で使用することによって、左右のグリップ4,5に連動性を持たせる引き−引きケーブル式である。本例のケーブル11,11,…としては、一本のケーブル線で操作側の引き動作及び押し動作の両方を相手側に伝達することが可能なプッシュプルケーブルを使用している。プッシュプルケーブル11,11,…は、例えば樹脂等からなるアウターケーシング12の内部に、ワイヤ線であるインナーケーブル13が押し引き可能な状態で収納されたケーブル線である。プッシュプルケーブル11,11,…は、インナーケーブル13の一端を左グリップ4に接続し、他端を右グリップ5に接続する取り付け状態をとっている。
【0033】
左グリップ4及び右グリップ5は、プッシュプルケーブル11,11,…の2本を1組とした計2組のケーブル線対11A,11B、即ち4本のプッシュプルケーブル11a〜11dで接続されている。これは、左右のグリップ4,5に連動性を持たせるに際して、この種のプッシュプルケーブル線を引き−引きの動作で使用し、しかもグリップ4,5が上下方向及び左右方向の2方向に操作可能であることから、2組のケーブル線対11A,11B、即ち4本のプッシュプルケーブル11a〜11dで接続されることになる。本例のケーブル線対11A,11Bは、ケーブル線対11A(第1上下操作伝達用プッシュプルケーブル11a,第2上下操作伝達用プッシュプルケーブル11b)が上下方向操作伝達用であり、ケーブル線対11B(第1左右操作伝達用プッシュプルケーブル11c、第2左右操作伝達用プッシュプルケーブル11d)が左右方向操作伝達用である。
【0034】
また、左グリップ4の根元には、左グリップ4が上下方向に傾倒操作された際にこれと同期して動くことが可能で、しかも左グリップ4を左右方向に回転可能に支持するグリップ支持部15が取り付けられている。よって、左グリップ4が上下傾倒操作された際には、グリップ支持部15が左グリップ4と同期して上下方向に回動し、左グリップ4が左右方向に操作された際には、グリップ支持部15は回動せずにユニバーサルジョイント9のみが回動動作する。左グリップ4は、ユニバーサルジョイント9の軸9bを上下軸として上下方向に傾倒動作する。
【0035】
第1上下操作伝達用プッシュプルケーブル11aのインナーケーブル13は、グリップ支持部15において上下軸9bに対しその上部寄りの位置に回動可能な状態で取り付けられた回動継手16を介して、ケーブル左端が左グリップ4に連結されている。
【0036】
また、第2上下操作伝達用プッシュプルケーブル11bは、取付部14にアウターケーシング12の左端部をネジ等により締結固定することで、ケーブル左端が左側枠体7に取り付け固定されている。第2上下操作伝達用プッシュプルケーブル11bのインナーケーブル13は、グリップ支持部15において上下軸9bに対しその下部寄りの位置に回動可能な状態で取り付けられた回動継手17を介して、ケーブル左端が左グリップ4に連結されている。
【0037】
また、第1左右操作伝達用プッシュプルケーブル11c及び第2左右操作伝達用プッシュプルケーブル11dは、入力した回転運動をその回転軸を変換して出力するかさ歯車(ベベルギア)19を介して左グリップ4に連結されている。左かさ歯車19は、円錐状の面に歯を取り付けた駆動歯車19aと従動歯車19bとを90度傾く状態で噛み合わせた歯車であって、左グリップ4が上下傾倒操作された際の傾倒操作力をケーブル線対11Aに入力する時の入力軸(上下軸9b)と、左グリップ4が左右回転操作された際の回転操作力をケーブル線対11Bに入力する時の入力軸とが互いに平行向き状態をとるように働く。本例の左かさ歯車19は、左グリップ4を左右方向に回転操作した際において左グリップ4に左右軸心L1回りに発生する回転力(操作力)を、その回転軸方向を90度変換して上下軸9bに平行する軸回りの回転力に変換し、これを第1左右操作伝達用プッシュプルケーブル11c及び第2左右操作伝達用プッシュプルケーブル11dに伝達する。
【0038】
左かさ歯車19の駆動歯車19aは、ユニバーサルジョイント9の駆動ヨーク9aに同一軸心位置で回転可能な状態で取り付けられた左右軸20に、自身の回転軸である駆動歯車軸が同じく同一軸心をとる状態で取り付け固定されている。左右軸20は、左側枠体7に形成された軸支持部22に回動可能な状態で貫挿支持されている。左かさ歯車19の駆動歯車19aは、左グリップ4が左右回転操作された際、この操作に同期して左右軸心L1回りに回転する。
【0039】
左かさ歯車19の従動歯車19bは、自身の回転軸である従動歯車軸23が左右軸心L1に対して90度傾く、即ち上下軸心L2と平行する向きをとるように配置されている。左かさ歯車19の従動歯車19bには、従動歯車19bと同一軸心回りに一体回転可能な板状の可動片24が取り付けられている。よって、左グリップ4が左右方向に回転操作されて駆動歯車19a及び従動歯車19bが回転すると、可動片24も従動歯車19bに同期して従動歯車19bと同一方向に回転する。
【0040】
第1左右操作伝達用プッシュプルケーブル11cは、左側枠体7の基端位置に配置された板状の取付部25にアウターケーシング12の左端部をネジ等により締結固定することで、ケーブル左端が左側枠体7に取り付け固定されている。第1左右操作伝達用プッシュプルケーブル11cのインナーケーブル13は、可動片24において従動歯車軸23の上部寄りの位置に回動可能な状態で取り付けられた回動継手26を介して、ケーブル左端が可動片24、即ち左グリップ4に連結されている。
【0041】
第2左右操作伝達用プッシュプルケーブル11dは、第1左右操作伝達用プッシュプルケーブル11cと同様に、左側枠体7の取付部25にアウターケーシング12の左端をネジ等により締結固定することで、ケーブル左端が左側枠体7に取り付け固定されている。また、これら4本のプッシュプルケーブル11a〜11dは、左側枠体7において平行する取り付け向きをとっている。第2左右操作伝達用プッシュプルケーブル11dのインナーケーブル13は、可動片24において従動歯車軸23の下部寄りの位置に回動可能な状態で取り付けられた回動継手27を介して、ケーブル左端が可動片24、即ち左グリップ4に連結されている。
【0042】
なお、右グリップ5の連動操作伝達機構10は、部品配置が左右で逆向きとなっていることが大きく異なるのみで、それ以外の基本的な構造は左グリップ4と同様である。即ち、左グリップ4と右グリップ5とを見比べた場合、これらの間の大きな違いは部品配置が左右対称となっていることのみである。よって、右グリップ5の説明は左グリップ4の説明を持って済ますこととし、右グリップ5の説明の詳細については省略する。
【0043】
図5に示すように、4本のプッシュプルケーブル11a〜11dのケーブル左端は、左側本体部6の背面に位置する取付部25から左側本体部6の内部に導入されている。また、4本のプッシュプルケーブル11a〜11dのケーブル右端は、右側本体部28の背面に位置する取付部29から右側本体部28の内部に導入されている。上下操作伝達用プッシュプルケーブル11a,11bを左側本体部6及び右側本体部28へ導入する際の導入位置は、左右で上下が入れ替わっている。これは、左右のグリップ4,5を上下傾倒操作した際に上下軸9b回りに発生する操作力をただ単に相手側に伝達するのみの構造であることが理由である。一方、左右操作伝達用プッシュプルケーブル11c,11dを左側本体部6及び右側本体部28へ導入する際の導入位置が左右で上下が同じなのは、これら左右のケーブル11c,11dが左かさ歯車19を介して接続されているからである。
【0044】
さらに、図2及び図5に示すように、左グリップ4及び右グリップ5の外側には、運転者の手が左グリップ4及び右グリップ5を握っているか否かによって操作を検出する左側タッチセンサ30及び右側タッチセンサ31がそれぞれ設置されている。左側タッチセンサ30及び右側タッチセンサ31は、例えば手が接触することによって静電容量が変化する静電容量センサであって、運転者の手がグリップ4,5に触れているか否かによって運転者の手が各グリップ4,5を握って操作していることを検出し、その検出結果を含む検出信号を出力する。なお、左側タッチセンサ30及び右側タッチセンサ31が操作検出手段として機能する。
【0045】
図3及び図4に示すように、左グリップ支持部15には、左側本体部6側に延びる回動片32が、左グリップ4と同期回転可能な状態で取り付けられている。この回動片32の先端には、ギアとして使用する複数の歯32aが形成されている。また、左側枠体7には、回動片32の歯32aと噛み合い状態をとるギア部が回転可能な状態で取り付けられている。ギア部には、このギア部の回転量を検出するロータリエンコーダ33(図6参照)が取り付けられている。ロータリエンコーダ33は、ギア部の回転量を見ることにより左グリップ4の上下方向の傾倒操作量を検出し、その操作量に応じた検出信号を出力する。
【0046】
また、左グリップ4の左右軸20には、左右軸20の回転量を検出するポテンショメータ34(図6参照)が取り付けられている。ポテンショメータ34は、左右軸20の回転量を見ることにより左グリップ4の左右方向の回転量を検出し、その操作量に応じた検出信号を出力する。なお、左グリップ4の左右方向の回転量検出に際してその信頼性を確保するために、例えば左かさ歯車19の従動歯車軸23に、従動歯車軸23の回転を検出するロータリエンコーダを取り付けて、左グリップ4の操作量検出をロータリエンコーダ33、ポテンショメータ34、このロータリエンコーダによって3重系としてもよい。
【0047】
図6に示すように、左右連動操作装置3には、左右連動操作装置3を統括制御するコントロールユニットとして制御装置37が設けられている。この制御装置37は、入力側に左グリップ4の左側タッチセンサ30、ロータリエンコーダ33、及びポテンショメータ34が接続されるとともに、右グリップ5の右側タッチセンサ31、ロータリエンコーダ35、及びポテンショメータ36も接続されている。制御装置37には、メモリ38が設けられている。メモリ38には、これらセンサ群、エンコーダ群やポテンショメータ群から取得する検出信号を基に、各グリップ4,5に対する握り状態に応じてその時々のグリップ4,5の上下方向及び左右方向の操作量を算出する補正プログラムPrevが記憶されている。なお、ロータリエンコーダ33,35及びポテンショメータ34,36が操作量検出手段として機能する。
【0048】
制御装置37は、この補正プログラムPrevに基づいて算出した操作量情報を各種ECUに出力することにより、これらECUに車両1の加減速状態や操舵状態を制御させる。詳しくは、制御装置37は、グリップ4,5が操作された際、グリップ4,5の操作状態を判定する操作状態判定部37aと、操作状態判定部37aの判定結果を基に操作量情報を補正する補正部37bとを機能的に生成する。これら操作状態判定部37a及び補正部37bは、制御装置37が補正プログラムPrevを実行することで機能的に生成するものであって、図6ではこれらをブロック図で表現している。なお、操作状態判定部37aが操作状態判定手段に相当し、補正部37bが補正手段に相当する。
【0049】
また、制御装置37は、運転者の利き手を設定する設定手段としての利き手設定部39が設けられている。この利き手設定部39は、例えばマイクロスイッチ等により機械式のスイッチ操作で切り換えるものや、或いは車内のタッチパネル式ディスプレイを用いて入力設定するものなど、種々の形式のものが採用可能である。また、この利き手設定部39は、運転者が車両に乗車したときに操作することで設定するものでもよいし、或いは運転者ごとに予め設定しておき、IDコード等で判別される運転者に応じて切り替わるものでもよい。
【0050】
次に、本例の左右連動操作装置3の入力操作に対する操作量の出力を図7に従って説明する。
図7に示すように、制御装置37は、まず運転者が左グリップ4及び右グリップ5を握って操作しているか否かを左側タッチセンサ30及び右側タッチセンサ31から出力された検出信号に基づいて判断する。
【0051】
制御装置37の操作状態判定部37aは、左側タッチセンサ30のみから握っている旨の検出信号があった場合には、運転者が左グリップ4のみを握って操作している片手操作と判断する。そして、制御装置37の補正部37bは、ロータリエンコーダ35及びポテンショメータ36の出力値を補正プログラムPrevに基づいて左手のみの片手操作に応じた補正をして操作量を出力する。詳しくは、制御装置37の補正部37bは、グリップの上下方向の傾倒操作では、操作された側である左グリップ4のロータリエンコーダ33の出力値を操作されていない側である右グリップ5のロータリエンコーダ35の出力値として優先使用することにより、右グリップ5の出力値を補正して本装置の操作量として出力する。また、制御装置37の補正部37bは、グリップの左右方向の傾倒操作では、操作された側である左グリップ4のポテンショメータ34からの出力値を操作されていない側である右グリップ5のポテンショメータ36の出力値として優先使用することにより、右グリップ5の出力値を補正して本装置の操作量として出力する。
【0052】
制御装置37の操作状態判定部37aは、右側タッチセンサ31のみから握っている旨の検出信号があった場合には、運転者が右グリップ5のみを握って操作している片手操作と判断する。そして、制御装置37の補正部37bは、ロータリエンコーダ33及びポテンショメータ34の出力値を補正プログラムPrevに基づいて右手のみの片手操作に応じた補正をして操作量を出力する。詳しくは、制御装置37の補正部37bは、グリップの上下方向の傾倒操作では、操作された側である右グリップ5のロータリエンコーダ35の出力値を操作されていない側である左グリップ4のロータリエンコーダ33の出力値として優先使用することにより、右グリップ5の出力値を補正して本装置の操作量として出力する。また、制御装置37の補正部37bは、グリップの左右方向の傾倒操作では、操作された側である右グリップ5のポテンショメータ36からの出力値を操作されていない側である左グリップ4のポテンショメータ34の出力値として優先使用することにより、左グリップ4の出力値を補正して本装置の操作量として出力する。
【0053】
制御装置37の操作状態判定部37aは、左側タッチセンサ30及び右側タッチセンサ31の両方から握っている旨の検出信号があった場合には、運転者が左グリップ4及び右グリップ5の両方を握って操作している両手操作と判断する。そして、制御装置37の補正部37bは、ロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正プログラムPrevに基づいて両手操作に応じた補正をして操作量を出力する。詳しくは、制御装置37の補正部37bは、上下方向の傾倒操作では、左グリップ4のロータリエンコーダ33からの出力値と右グリップ5のロータリエンコーダ35からの出力値とのうち運転者の利き手側の出力値を優先使用することにより、利き手でない側のロータリエンコーダ33,35の出力値を補正して本装置の操作量として出力する。また、制御装置37の補正部37bは、グリップの左右方向の傾倒操作では、左グリップ4のポテンショメータ34からの出力値と右グリップ5のポテンショメータ36からの出力値とのうち運転者の利き手側の出力値を優先使用することにより、利き手でない側のロータリエンコーダ33,35の出力値を補正して本装置の操作量として出力する。
【0054】
また、制御装置37は、左側タッチセンサ30の出力と左グリップ4のロータリエンコーダ33、ポテンショメータ34の出力とを、又は右側タッチセンサ31の出力と右グリップ5のロータリエンコーダ35、ポテンショメータ36の出力とを比較して故障診断を行うことが可能である。詳しくは、制御装置37は、グリップ4,5が操作された際、これらセンサ類を故障判定補正する故障判定部37cを機能的に生成する。制御装置37の故障判定部37cは、例えば左側タッチセンサ30に握りを検出する検出信号の出力がない状態で、左グリップ4のロータリエンコーダ33、ポテンショメータ34から出力がある場合には、左側タッチセンサ30、又は左グリップ4のロータリエンコーダ33、左グリップ4のポテンショメータ34のいずれかが故障している可能性があると判断する。なお、右側においても同様に行うことによって故障診断を行うことが可能である。故障判定部37cが故障監視手段として機能する。
【0055】
さて、本例においては、左側タッチセンサ30及び右側タッチセンサ31によりグリップ4,5の操作有無を監視し、これらグリップ4,5の一方のみ操作された片手操作時の際には、操作されている側のグリップ4,5から出力されるセンサ出力値を、最終的に制御装置37から他ECUに出力されるグリップ操作量として優先使用する。このため、片手操作の際に、例えばギアやプッシュプルケーブルのバックラッシュやクリアランス等によって2つのグリップ4,5の操作量の出力値に差が発生したとしても、この出力差をグリップ操作量として他ECUに出力させずに済む。よって、操作精度の低下が抑制され、装置としての機能性を高いものとすることが可能となる。
【0056】
以上、説明した実施形態によれば、以下の作用効果を奏することができる。
(1)グリップ4,5の片手操作が制御装置37の操作状態判定部37aによって監視され、片手操作が検出された際には、操作されていない側のグリップ4,5に設けられた非操作側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値が制御装置37の補正部37bによって補正される。ところで、片手操作の際には、連動操作伝達機構10に生じるバックラッシュやクリアランス等を原因として、非操作側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値が、操作側のロータリエンコーダ33,35及びポテンショメータ34,36である操作側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値に対して誤差を持って出力されることもある。こうなると、左右のロータリエンコーダ33,35及びポテンショメータ34,36の出力値に誤差が生じ、正確な操作量検出に支障を来す。しかし、本構成の場合は、片手操作の際には、非操作側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値が操作側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値に近づくように補正されるので、左右の出力誤差を低く抑えることが可能となる。
【0057】
(2)操作検出手段として左側タッチセンサ30及び右側タッチセンサ31を使用するので、操作者によってグリップ4,5が操作されているか否かを、操作者がグリップ4,5に触れているか否かによって検出することが可能となる。このように、グリップ4,5の操作有無を、単なるグリップ4,5への手等の接触により操作有無を検出することが可能となれば、グリップ4,5の片手操作を速やかに検出することが可能となる。
【0058】
(3)2つのロータリエンコーダ33,35及びポテンショメータ34,36の出力値のうち、片手操作された側の出力値を優先使用するという簡単な方式によって、非操作側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正することが可能となる。
【0059】
(4)操作者がグリップ4,5を操作する際には、少なからず利き手側のグリップ4,5に、これと反対側のグリップ4,5よりも大きい操作力が加えられる傾向があり、このような操作によって左右のセンサ出力に誤差が発生する可能性がある。そこで、両方のグリップ4,5が握られている両手操作であることが制御装置37の操作状態判定部37aで検出された際には、操作者の利き手側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値を優先使用する。このため、両方のグリップ4,5が操作される状況下で左右のロータリエンコーダ33,35及びポテンショメータ34,36の出力値に誤差が発生していても、これに対応することが可能となる。
【0060】
(5)ロータリエンコーダ33,35及びポテンショメータ34,36から操作量がある旨の出力がありながら、タッチセンサ30,31から操作がない旨の出力がある場合には、ロータリエンコーダ33,35及びポテンショメータ34,36とタッチセンサ30,31とのどちらかの検出が異常であるとして故障診断を行うことが可能となる。このため、タッチセンサ30,31をグリップ4,5に対する操作有無のみならず、故障診断というフェールセーフにも使用することが可能となる。
【0061】
(第2の実施形態)
以下、本発明を具体化した左右連動操作装置の第2の実施形態を図8に従って説明する。この実施形態の左右連動操作装置は、右側タッチセンサ31を省略し、左側タッチセンサ30のみを設ける点、及びそれに伴う制御装置37の操作量の補正が上記第1の実施形態と異なっている。以下、第1の実施形態との相違点を中心に説明する。なお、この実施形態の左右連動操作装置は、第1の実施形態の左右連動操作装置とほぼ同様の構成を備えている。
【0062】
本実施形態では、片側にのみタッチセンサを設けるため、左側タッチセンサ30に加えて、ロータリエンコーダ33,35及びポテンショメータ34,36が操作検出手段として機能する。制御装置37の操作状態判定部37aは、運転者が左グリップ4及び右グリップ5を握って操作しているか否かを左側タッチセンサ30に加えて、ロータリエンコーダ33,35及びポテンショメータ34,36から出力された出力信号に基づいて判断する。
【0063】
図8に示すように、制御装置37の操作状態判定部37aは、左側タッチセンサ30から握っている旨の検出信号があった場合(ステップS1:YES)には、このときの操作が左手のみの片手操作又は両手操作のどちらかであると判断する(ステップS2)。ここで、グリップ操作有無を見るタッチセンサは左グリップ4のみにしか設けられていないため、制御装置37はこのときの握り操作を左手のみの片手操作又は両手操作のどちらかであることまでの判断しかできないが、左グリップ4が握り操作されていることは事実である。よって、このときは、左グリップ4から得るセンサ出力を優先使用する。即ち、制御装置37の補正部37bは、ロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正プログラムPrevに基づいて左手のみの片手操作に応じた補正をして操作量を出力する(ステップS3)。詳しくは、制御装置37の補正部37bは、グリップ4,5の上下方向の傾倒操作では、操作された側である左グリップ4のロータリエンコーダ33の出力値を操作されていない側である右グリップ5のロータリエンコーダ35の出力値として優先使用することにより、右グリップ5の出力値を補正して本装置の操作量として出力する。また、制御装置37の補正部37bは、グリップ4,5の左右方向の傾倒操作では、操作された側である左グリップ4のポテンショメータ34からの出力値を操作されていない側である右グリップ5のポテンショメータ36の出力値として優先使用することにより、右グリップ5の出力値を補正して本装置の操作量として出力する。
【0064】
制御装置37の操作状態判定部37aは、左側タッチセンサ30から握っている旨の検出信号がない(ステップS1:NO)にもかかわらず、ロータリエンコーダ33,35及びポテンショメータ34,36から出力がある場合(ステップS4:YES)には、右手のみの片手操作と判断する(ステップS5)。そして、制御装置37の補正部37bは、ロータリエンコーダ33,35及びポテンショメータ34,36の出力値を右手のみの片手操作に応じた補正をして操作量を出力する(ステップS6)。詳しくは、制御装置37の補正部37bは、グリップ4,5の上下方向の傾倒操作では、操作された側である右グリップ5のロータリエンコーダ35の出力値を操作されていない側である左グリップ4のロータリエンコーダ33の出力値として優先使用することにより、右グリップ5の出力値を補正して本装置の操作量として算出して出力する。また、グリップ4,5の左右方向の傾倒操作では、操作された側である右グリップ5のポテンショメータ36からの出力値を操作されていない側である左グリップ4のポテンショメータ34の出力値として優先使用することにより、左グリップ4の出力値を補正して本装置の操作量として算出して出力する。
【0065】
以上、説明した実施形態によれば、第1の実施形態の(1)の作用効果に加え、以下の作用効果を奏することができる。
(6)操作検出手段として左側タッチセンサ30が設けられるため、操作者がグリップ4,5に触れているか否かを検出することで片手操作時にどちらのグリップ4,5を操作しているか速やかに検出することができる。また、グリップ操作有無を見るタッチセンサをグリップの片側にのみ設ければ済むので、センサに要する部品数及び部品コストを低く抑えることができる。
【0066】
(7)片方のグリップ4,5のみが握られている片手操作であることが左側タッチセンサ30、ロータリエンコーダ33,35、及びポテンショメータ34,36の出力によって検出された際には、制御装置37は運転者に操作されたグリップ4,5側のロータリエンコーダ33,35及びポテンショメータ34,36の出力結果を操作量として出力する。このため、正確な出力が得られる操作されているグリップ4,5の出力結果を操作量とすることで正確な操作量を出力することができる。
【0067】
(第3の実施形態)
以下、本発明を具体化した左右連動操作装置の第3の実施形態を図6及び図9に従って説明する。この実施形態の左右連動操作装置は、左側タッチセンサ30及び右側タッチセンサ31に代えて荷重センサを各グリップ支持部15に設ける点、及びそれに伴う制御装置37の操作量の補正が上記第1の実施形態と異なっている。以下、第1の実施形態との相違点を中心に説明する。なお、この実施形態の左右連動操作装置は、第1の実施形態の左右連動操作装置とほぼ同様の構成を備えている。
【0068】
図6に示すように、左右連動操作装置3の各グリップ4,5を支持するグリップ支持部15には、運転者がグリップ4,5を操作する際に掛かる荷重を検出する荷重センサ40,41が設けられている。荷重センサ40,41は、例えばロードセルを用い、荷重の有無だけでなくその量も検出し、検出信号を出力する。なお、荷重センサ40,41が操作検出手段として機能する。
【0069】
制御装置37の操作状態判定部37aは、まず運転者が左グリップ4及び右グリップ5を操作しているか否かを左側荷重センサ及び右側荷重センサから出力された検出信号に基づいて判断する。
【0070】
図9に示すように、制御装置37の操作状態判定部37aは、左側荷重センサ40のみから操作している旨の検出信号があった場合には、運転者が左グリップ4のみを操作している片手操作と判断する。そして、制御装置37の補正部37bは、ロータリエンコーダ33,35及びポテンショメータ34,36の出力値を左手のみの片手操作に応じた補正をして操作量を出力する。詳しくは、制御装置37の補正部37bは、グリップの上下方向の傾倒操作では、左グリップ4のロータリエンコーダ33の出力を本装置の操作量として算出して出力する。また、制御装置37の補正部37bは、グリップの左右方向の傾倒操作では、左グリップ4のポテンショメータ34からの出力を本装置の操作量として算出して出力する。
【0071】
制御装置37の操作状態判定部37aは、右側荷重センサ41のみから操作している旨の検出信号があった場合には、運転者が右グリップ5のみを操作している片手操作と判断する。そして、制御装置37の補正部37bは、ロータリエンコーダ33,35及びポテンショメータ34,36の出力値を右手のみの片手操作に応じた補正をして操作量を出力する。詳しくは、制御装置37の補正部37bは、グリップの上下方向の傾倒操作では、右グリップ5のロータリエンコーダ35の出力を本装置の操作量として算出して出力する。また、制御装置37の補正部37bは、グリップの左右方向の傾倒操作では、右グリップ5のポテンショメータ36からの出力を本装置の操作量として算出して出力する。
【0072】
制御装置37の操作状態判定部37aは、左側荷重センサ40及び右側荷重センサ41の両方から操作している旨の検出信号があった場合には、このときの操作が片手操作及び両手操作のどちらであるかを判定する。即ち、操作状態判定部37aは、両荷重センサ40,41のセンサ出力のうち一方のセンサ出力のみが閾値を超える場合には、もう一方側のグリップはただ手が添えられているだけの片手操作として処理する。そして、操作状態判定部37aは、前述した片手操作時に行うセンサ出力の補正を実行する。
【0073】
また、操作状態判定部37aは、両荷重センサ40,41のセンサ出力がともに閾値を超える場合、このときの操作を両手操作として処理する。そして、制御装置37の補正部37bは、ロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正プログラムPrevに基づいて両手操作に応じた補正をして操作量を出力する。詳しくは、制御装置37の補正部37bは、上下方向の傾倒操作では、操作荷重が大きい側のロータリエンコーダ33,35の出力値を操作荷重が小さい側のロータリエンコーダ33,35の出力値として優先使用することにより、操作荷重が小さい側のロータリエンコーダ33,35の出力値を補正して本装置の操作量として出力する。また、制御装置37の補正部37bは、グリップの左右方向の傾倒操作では、操作荷重が大きい側のポテンショメータ34,36の出力値を操作荷重が小さい側のポテンショメータ34,36の出力値として優先使用することにより、操作荷重が小さい側のポテンショメータ34,36の出力値を補正して本装置の操作量として出力する。
【0074】
さて、左側荷重センサ40及び右側荷重センサ41が設けられるため、操作者が左グリップ4及び右グリップ5にどれくらいの荷重を掛けて操作しているか否かを検出し、片手操作時にどちらのグリップ4,5を操作しているか、又は両手操作時にどちらかに偏った操作力が加えられているかを速やかに検出することができる。また、両手操作時に両側に同じ操作力が加えられない場合に、他方より大きい荷重が検出されたグリップ4,5に他方より大きい操作力が加えられているグリップ4,5を検出することができ、荷重量に応じて加重平均を算出する等の補正をして操作量を出力する。このため、片手操作時のグリップ4,5に対する荷重からどちらのグリップ4,5を操作しているかだけでなく、両手操作時のどちらのグリップ4,5にどれだけの操作力が加えられているかを検出することができ、この検出結果に基づいて出力値を補正するため、片手操作時及び両手操作時の出力誤差を抑制して出力することができる。
【0075】
以上、説明した実施形態によれば、第1の実施形態の(1)の作用効果に加え、以下の作用効果を奏することができる。
(8)操作検出手段として荷重センサを使用するので、操作者がグリップ4,5にどの程度の荷重をかけているかにより、グリップ4,5に対する操作有無が検出される。このため、グリップ4,5を操作する意志があるときには、グリップ4,5に大きな荷重が加えられるはずであるから、グリップ4,5の操作有無をグリップ4,5にかかる荷重で検出するようにすれば、グリップ4,5の片手操作有無を、より精度よく検出することが可能となる。
【0076】
(9)両方のグリップ4,5が握られている両手操作であることが操作状態判定部37aで検出された際に、一方の操作荷重のみが閾値を超えていれば、片手操作として処理し、操作されていない側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正する。このため、操作者が左右のグリップ4,5の両方に触れた操作をとっている際、例えば仮に一方のグリップ4,5は手を添えているだけのような操作状態がとられている場合には、これを両手操作ではなく、片手操作として処理することが可能となる。
【0077】
(10)両方のグリップ4,5が握られている両手操作であることが制御装置37の操作状態判定部37aで検出された際には、2つのグリップ4,5のうち、大きな荷重で以て操作されている側のロータリエンコーダ33,35及びポテンショメータ34,36の出力値を優先使用する。このため、両方のグリップ4,5が操作される状況下で左右のロータリエンコーダ33,35及びポテンショメータ34,36の出力値に誤差が発生していても、これに対応することが可能となる。また、グリップ4,5の操作有無を荷重センサにより検出するので、両手操作であっても片手が手を添えているだけのような片手操作と変わらない場合にも、操作有無を精度よく検出しつつ、かつ操作者の意志に沿った操作検出も可能となる。
【0078】
なお、上記実施形態は、これを適宜変更した以下の形態にて実施することができる。
・上記実施形態において、グリップ4,5の上下方向の傾倒操作をロータリエンコーダ33,35、及び左右方向の傾倒操作をポテンショメータ34,36を用いて検出したが、両方をロータリエンコーダにしたり、ポテンショメータにしたり、他のセンサを用いてもよい。また、センサの数量を任意に変更してもよい。
【0079】
・上記実施形態において、制御装置37は、グリップ側に設けても、車両側に搭載してもどちらでもよい。
・第1の実施形態では、両手操作に応じた補正として利き手側の出力値を優先使用することにより、利き手でない側の出力値を補正するようにしたが、右側の出力値と左側の出力値との平均値を算出する補正を両手操作に応じた補正としてもよい。また、センサ出力の補正方式は、出力の一方の優先や、平均値の算出に限らず、左右のセンサ出力の誤差を小さく抑えられるものであれば、特に限定されない。
【0080】
・第1の実施形態及び第2の実施形態では、左側タッチセンサ30及び右側タッチセンサ31は、例えば手が接触することによって静電容量が変化する静電容量センサとしたが、圧力センサ等のその他のセンサとしてもよい。
【0081】
・第2の実施形態において、右側タッチセンサ31を省略し、左側タッチセンサ30のみを設けるようにしたが、左側タッチセンサ30を省略し、右側タッチセンサ31のみを設けるようにしてもよい。
【0082】
・第1の実施形態において、故障診断を行うようにしたが、第3の実施形態でも行ってもよい。また、上記実施形態において、故障診断を行わないようにしてもよい。
・第1の実施形態において、例えばタッチセンサ30,31のタッチ検出範囲(手の接触範囲)を見ることにより、グリップ4、5を両手で触れているものの片側は手を添えただけの操作状態の片手操作を検出してもよい。
【0083】
・第3の実施形態において、片手操作及び両手操作の両方とも、荷重の大きい側を優先使用することに限定されない。例えば、片手操作の際には、荷重の大きい側のセンサ出力値を優先使用するものの、両手操作の際には、第1の実施形態のように、利き手側のセンサ出力を優先使用する形式をとってもよい。
【0084】
・第1〜第3の実施形態において、グリップ4,5の握りを検出するセンサは、必ずしもタッチセンサや荷重センサに限らず、他の種々のセンサが使用可能である。また、片手操作や両手操作の検出方式も、使用するセンサに合わせて種々の方式を採用することが可能である。
【0085】
次に、前記実施形態から把握できる技術的思想をその効果と共に記載する。
(a)請求項1〜4のいずれか一項に記載の左右連動操作装置において、前記操作状態判定手段は、前記操作手段に対する操作有無の検出が可能な操作検出手段を、前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、前記補正手段は、前記操作状態判定手段で両手操作を検出した際、両方の同操作手段の前記操作量検出手段の出力結果の平均値を操作量として出力することを特徴とする左右連動操作装置。
【0086】
同構成によれば、両方の操作手段が握られている両手操作であることが操作状態判定手段で検出された際には、両方の操作手段の操作量検出手段の出力結果の平均値を操作量として出力する。このため、例えば、左右の操作量検出手段で誤差があった際に、平均値を採用することで誤差のある側の出力結果を採用したときと比べて誤差を半分にすることができ、より正確な操作量を出力することができる。
【符号の説明】
【0087】
L1…左右軸心、L2…上下軸心、Prev…補正プログラム、1…車両、2…運転席シート、3…左右連動操作装置、4…左グリップ、5…右グリップ、6…左側本体部、7…左側枠体、8…開口孔、9…ユニバーサルジョイント、10…連動操作伝達機構、11…プッシュプルケーブル、12…アウターケーシング、13…インナーケーシング、14…取付部、15…グリップ支持部、16,17…回動継手、19…かさ歯車、20…左右軸、22…軸支持部、23…従動歯車軸、24…可動片、25…左側取付部、26,27…回動継手、28…左側本体部、29…右側取付部、30…左側タッチセンサ、31…右側タッチセンサ、32…回動片、33,35…ロータリエンコーダ、34,36…ポテンショメータ、37…制御装置、37a…操作状態判定部、37b…補正部、37c…故障判定部、38…メモリ、39…利き手設定部、40…左側荷重センサ、41…右側荷重センサ。
【特許請求の範囲】
【請求項1】
操作者が手にする操作箇所として操作手段が前記操作者の左右両側に一対配置され、一方に生じた操作力を他方に連動性を持って伝達可能な連動操作伝達機構により、2つの前記操作手段のうち一方を操作すると他方もそれに追従するように同方向に連動して動き、2つの前記操作手段の各々の操作量を、各々の前記操作手段に設けた操作量検出手段によって検出する左右連動操作装置において、
操作者による2つの前記操作手段の操作状態を判定する操作状態判定手段と、
前記操作状態判定手段によって片手操作を検出した際、操作されていない側の前記操作手段に設けられた前記操作量検出手段である非操作側操作量検出手段の出力値を補正する補正手段とを備えた
ことを特徴とする左右連動操作装置。
【請求項2】
請求項1に記載の左右連動操作装置において、
前記操作状態判定手段は、前記操作手段に対する操作有無を検出する操作検出手段として、同操作手段への接触有無を検出するタッチセンサを使用した
ことを特徴とする左右連動操作装置。
【請求項3】
請求項1又は2に記載の左右連動操作装置において、
前記補正手段は、前記片手操作が発生した際、片手操作された側の前記操作手段の前記操作量検出手段である操作側操作量検出手段の出力値を、前記非操作側操作量検出手段の出力値として優先使用することにより、前記非操作側操作量検出手段の出力値を補正する
ことを特徴とする左右連動操作装置。
【請求項4】
請求項1〜3のいずれか一項に記載の左右連動操作装置において、
2つの前記操作手段のうち、どちらが利き手側のものであるのかを設定する設定手段を備え、
前記操作状態判定手段は、前記操作手段に対する操作有無の検出が可能な操作検出手段を、前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、
前記補正手段は、前記操作状態判定手段で両手操作を検出した際、操作者の利き手側の前記操作量検出手段の出力値を優先使用することにより、利き手でない側の前記操作量検出手段の出力値を補正する
ことを特徴とする左右連動操作装置。
【請求項5】
請求項1に記載の左右連動操作装置において、
前記操作状態判定手段は、前記操作手段に対する操作有無を検出する操作検出手段として、前記操作手段自身にかかる荷重を検出する荷重センサを使用した
ことを特徴とする左右連動操作装置。
【請求項6】
請求項5に記載の左右連動操作装置において、
前記操作状態判定手段は、前記荷重センサを前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、
前記補正手段は、前記操作状態判定手段で両手操作を検出した際、一方の操作荷重のみが閾値を超えていれば、当該両手操作を片手操作として処理し、操作されていない側の前記操作手段の前記操作量検出手段である非操作側操作量検出手段の出力値を補正する
ことを特徴とする左右連動操作装置。
【請求項7】
請求項5又は6に記載の左右連動操作装置において、
前記操作状態判定手段は、前記荷重センサを前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、
前記補正手段は、前記操作状態判定手段で両手操作を検出した際、操作荷重が大きい側の前記操作量検出手段の出力値を荷重が小さい側の前記操作量検出手段の出力値として優先使用することにより、操作荷重が小さい側の前記操作量検出手段の出力値を補正する
ことを特徴とする左右連動操作装置。
【請求項8】
請求項1〜7のいずれか一項に記載の左右連動操作装置において、
前記操作状態判定手段は、前記操作手段に対する操作有無を検出する操作検出手段を、前記操作手段の両方に各々備え、
前記操作量検出手段の出力値と、前記操作検出手段の出力値とを比較することにより、これら部品に関する故障の有無を監視する故障監視手段を備えた
ことを特徴とする左右連動操作装置。
【請求項1】
操作者が手にする操作箇所として操作手段が前記操作者の左右両側に一対配置され、一方に生じた操作力を他方に連動性を持って伝達可能な連動操作伝達機構により、2つの前記操作手段のうち一方を操作すると他方もそれに追従するように同方向に連動して動き、2つの前記操作手段の各々の操作量を、各々の前記操作手段に設けた操作量検出手段によって検出する左右連動操作装置において、
操作者による2つの前記操作手段の操作状態を判定する操作状態判定手段と、
前記操作状態判定手段によって片手操作を検出した際、操作されていない側の前記操作手段に設けられた前記操作量検出手段である非操作側操作量検出手段の出力値を補正する補正手段とを備えた
ことを特徴とする左右連動操作装置。
【請求項2】
請求項1に記載の左右連動操作装置において、
前記操作状態判定手段は、前記操作手段に対する操作有無を検出する操作検出手段として、同操作手段への接触有無を検出するタッチセンサを使用した
ことを特徴とする左右連動操作装置。
【請求項3】
請求項1又は2に記載の左右連動操作装置において、
前記補正手段は、前記片手操作が発生した際、片手操作された側の前記操作手段の前記操作量検出手段である操作側操作量検出手段の出力値を、前記非操作側操作量検出手段の出力値として優先使用することにより、前記非操作側操作量検出手段の出力値を補正する
ことを特徴とする左右連動操作装置。
【請求項4】
請求項1〜3のいずれか一項に記載の左右連動操作装置において、
2つの前記操作手段のうち、どちらが利き手側のものであるのかを設定する設定手段を備え、
前記操作状態判定手段は、前記操作手段に対する操作有無の検出が可能な操作検出手段を、前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、
前記補正手段は、前記操作状態判定手段で両手操作を検出した際、操作者の利き手側の前記操作量検出手段の出力値を優先使用することにより、利き手でない側の前記操作量検出手段の出力値を補正する
ことを特徴とする左右連動操作装置。
【請求項5】
請求項1に記載の左右連動操作装置において、
前記操作状態判定手段は、前記操作手段に対する操作有無を検出する操作検出手段として、前記操作手段自身にかかる荷重を検出する荷重センサを使用した
ことを特徴とする左右連動操作装置。
【請求項6】
請求項5に記載の左右連動操作装置において、
前記操作状態判定手段は、前記荷重センサを前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、
前記補正手段は、前記操作状態判定手段で両手操作を検出した際、一方の操作荷重のみが閾値を超えていれば、当該両手操作を片手操作として処理し、操作されていない側の前記操作手段の前記操作量検出手段である非操作側操作量検出手段の出力値を補正する
ことを特徴とする左右連動操作装置。
【請求項7】
請求項5又は6に記載の左右連動操作装置において、
前記操作状態判定手段は、前記荷重センサを前記操作手段の左右両方に設けることにより、前記操作手段の両方が操作された両手操作の有無が検出可能であり、
前記補正手段は、前記操作状態判定手段で両手操作を検出した際、操作荷重が大きい側の前記操作量検出手段の出力値を荷重が小さい側の前記操作量検出手段の出力値として優先使用することにより、操作荷重が小さい側の前記操作量検出手段の出力値を補正する
ことを特徴とする左右連動操作装置。
【請求項8】
請求項1〜7のいずれか一項に記載の左右連動操作装置において、
前記操作状態判定手段は、前記操作手段に対する操作有無を検出する操作検出手段を、前記操作手段の両方に各々備え、
前記操作量検出手段の出力値と、前記操作検出手段の出力値とを比較することにより、これら部品に関する故障の有無を監視する故障監視手段を備えた
ことを特徴とする左右連動操作装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−39966(P2011−39966A)
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願番号】特願2009−189114(P2009−189114)
【出願日】平成21年8月18日(2009.8.18)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願日】平成21年8月18日(2009.8.18)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
[ Back to top ]