
差動軸受の損傷シグネチャのための合成同期サンプリングおよび加速度包絡線処理
差動軸受の損傷を検出するためのシステムは、軸受損傷の速度差依存性をなくすことができ、かつ損傷特徴を強調することができるように、軸受アセンブリの軌道輪速度差に対応する回転計信号を生成する合成された回転計を含む。システムはまた、損傷のシグネチャをさらに強調するために、サイクルドメインにおける加速度包絡線処理を含む。システムは、前記合成されたサイクルドメインデータに対して、高速フーリエ変換(FFT)を適用して、差動軸受速度の次数の増分に対応する次数ドメインで、差動軸受の損傷シグネチャを生成することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に、エンジン軸受の振動波(vibration signature)に関し、より詳細には、エンジンの差動軸受に関連する差動軸受の損傷シグネチャを強調するためのサンプリングおよび加速度包絡線処理技法に関する。
【背景技術】
【0002】
差動軸受は、最も脆弱なエンジン部品の一部であり、さらに、動作状態を監視するのが最も困難なエンジン部品の一部である。
【0003】
振動波は、通常の転動体軸受システムに関連する最も信頼性のある早期の警告データを提供する。この点に関して、加速度包絡線処理ベースの技法が、何年にもわたり存在してきた。同期サンプリング技法もまた、軸受のシグネチャの強調において、特に可変速の用途で広く使用される。
【0004】
同期サンプリングは、均等な時間によるサンプリングを、均等な軸円周角のサンプリングへと変換する技法であり、したがって、ロータ速度依存性が除かれる。これは通常、静的な検出器を通過する回転部分の物理的なイベントをカウントすることにより軸の動作を監視するために使用されるエンコーダを軸受に取り付けることにより達成される。
【0005】
しかし、差動軸受動作における軸受の軌道輪は共に動作しており、軌道輪の速度は、通常、軸受動作中に正確には制御されない。さらに、差動軸受アセンブリは、他の機械的構成要素下に埋め込まれており、また軸受のシグネチャは軌道輪間の速度差に比例する。したがって、同期サンプリングは、元々小さくかつ速度差に依存するシグネチャを抽出する必要がある。軌道輪が移動するため、差動速度に対するエンコーダは、物理的に差動軸受には適していない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】欧州特許第1304463号
【発明の概要】
【発明が解決しようとする課題】
【0007】
軸受の動作中に、差動軸受の損傷シグネチャを確認するための従来のサンプリング技法に関連する上記で述べた欠点を克服するサンプリング技法を提供することは有利なはずである。
【課題を解決するための手段】
【0008】
簡単に言うと、本発明の一実施形態によれば、差動軸受の損傷を検出する方法は、
内側および外側で回転する軸受軌道輪に対する複数の速度信号を生成するステップと、
内側および外側軌道輪の速度差に対応する回転計信号を合成するステップと、
合成された速度差回転計信号に応じて、軸受の振動データを同期させてサンプリングし、少なくとも1つの軸受損傷シグネチャに対応する合成されたサイクルドメインデータを生成するステップとを含む。
【0009】
本発明の他の実施形態によれば、差動軸受損傷のシグネチャを強調する方法は、
差動軸受の軌道輪のそれぞれに対する複数の速度信号を生成するステップと、
少なくとも1つの差動軸受の軌道輪に対する少なくとも1つの回転計信号を合成するステップと、
複数の速度信号、および少なくとも1つの合成された回転計信号に応じて、軌道輪速度差に対して、差動軸受に関連する振動データを同期させてサンプリングし、少なくとも1つの軸受損傷シグネチャに対応する合成されたサイクルドメインデータを生成するステップとを含む。
【0010】
本発明のさらに他の実施形態によれば、軸受損傷を検出するためのシステムは、
軸受アセンブリの軌道輪速度に基づいて、速度信号が、欠けている回転計信号の近似的な位置に対応するように、軸受アセンブリに対する速度信号を生成するように構成された合成回転計と、
速度信号に基づいて、軸受アセンブリに関連する振動データを同期させてサンプリングして、少なくとも1つの軸受アセンブリの損傷シグネチャに対応する合成されたサイクルドメインデータを生成するように構成されたサンプリング機構と
を備える。
【0011】
本発明のこれらの、および他の特徴、態様、ならびに利点は、添付の図面を参照して以下の詳細な説明を読めばさらによく理解されよう。図中、同様の文字は諸図面を通して同様の部品を表す。
【図面の簡単な説明】
【0012】
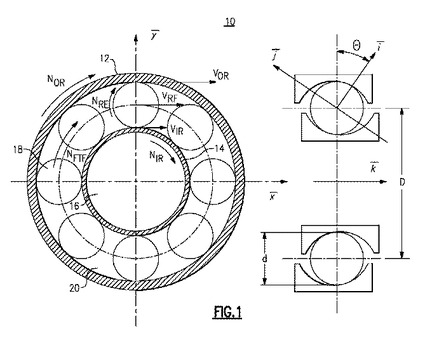
【図1】当技術分野で知られている差動玉軸受アセンブリの図である。
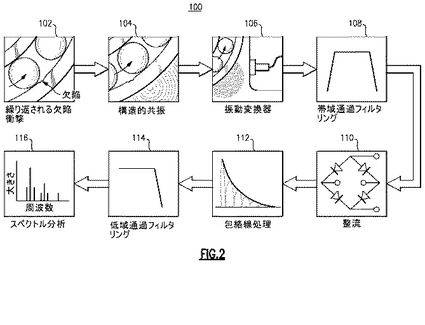
【図2】回転する軸受の損傷シグネチャを強調させるために当技術分野で知られた加速度包絡線信号処理技法を示す流れ図である。
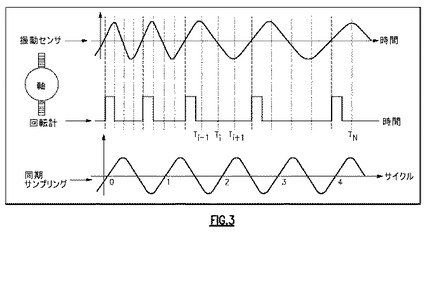
【図3】本発明の一実施形態による回転計により生成された均等な時間でサンプリングされたデータを、均等な空間データへと変換することを示す波形図である。
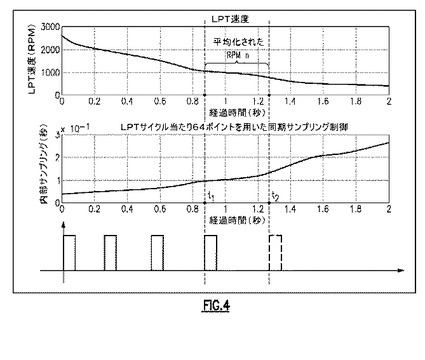
【図4】本発明の一実施形態による速度データから生成された合成された回転計データを示す波形図である。
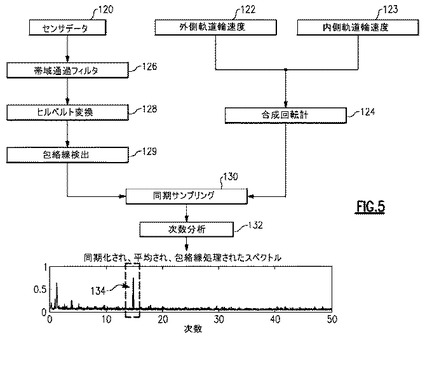
【図5】本発明の一実施形態による合成同期サンプリング技法を示す流れ図である。
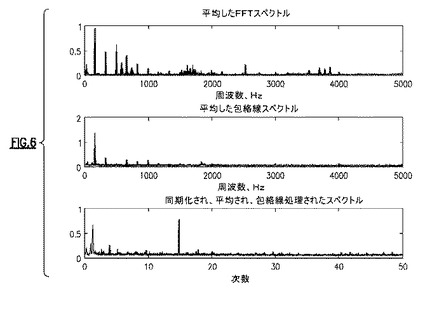
【図6】本発明の一実施形態による同期化された平均の包絡線処理されたスペクトルを、平均したFFTスペクトルと比較し、かつ平均した包絡線スペクトルと比較した図である。
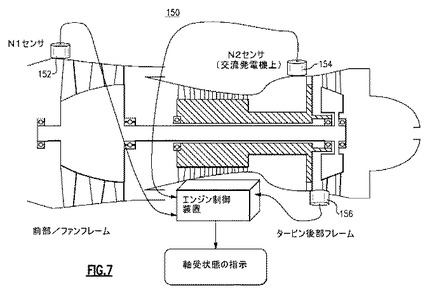
【図7】本発明の一実施形態による航空機エンジンケーシング上の様々な点に速度センサおよび加速度計を配置することを示す図である。
【発明を実施するための形態】
【0013】
上記で特定した諸図面は、代替の諸実施形態を記載しているが、論議の中で気付かれるように、本発明の他の実施形態も企図される。すべての場合において、本開示は、限定するためではなく、代表させるために本発明の例示された諸実施形態を提示している。本発明の原理の範囲および趣旨に含まれる数多くの他の変形形態および実施形態を、当業者であれば考案することができる。
【0014】
図3〜6を参照して以下で述べられる本発明の実施形態を理解し易くするために、加速度包絡線処理および同期サンプリングの原理における背景が、当技術分野で知られた差動玉軸受アセンブリ10を示す図1と、回転する軸受の損傷シグネチャを強調するために、当技術分野で知られた加速度包絡線信号処理技法を示す流れ図を示す図2とを参照して次に以下で述べられる。減摩性軸受、すなわち、ローラまたはボールなどの転動体を含む軸受は、軸受の幾何形状および回転速度に依存する特定の周波数で振動を励起する力を生ずる。これらの振動周波数は、軸受トーン(tone)と呼ばれる。すべてのこのような軸受は、その状態に関係なく、軸受が悪化するにつれてレベルが増加する、何らかのレベルの軸受トーンを生ずるようになる。
【0015】
一般に、転動体軸受に関連する周波数は4つ存在する。それらは、
1)保持器周波数、または基本列周波数(FTF:Fundamental Train Frequency)
2)転動体周波数
3)ボールが内側の軌道を通過する周波数
4)ボールが外側の軌道を通過する周波数
を含む。
【0016】
多くの工業用途では、外側の軌道12は、通常、固定されており、内側の軌道14が軸16と共に回転している。しかし、最も一般的な場合では、内側の軌道14と外側の軌道12は共に、異なる速度で回転することができる。図1で示すように、外側の軌道12は、速度NORで回転しているが、内側の軌道14は、速度NIRで回転している。転動体18と、軌道12、14との間の接触点において、速度は、
【0017】
【数1】

および
【0018】
【数2】
であり、式中、Dおよびdは、図1で示す寸法を表す。転動体18と、軌道12、14との間は完全な回転であると仮定すると、転動体18または保持器20の中心の速度は、
【0019】
【数3】
である。したがって、保持器の周波数は、
【0020】
【数4】
である。
【0021】
転動体18に対するスピン周波数は、転動体(ボール)18と外側軌道輪の接触点の境界面で滑りがないと仮定すると、同様に決定することができる。すべての接触点で、ボールの速度は、
【0022】
【数5】
であり、式中、
【0023】
【数6】
は接触点における外側軌道輪12の速度であり、
【0024】
【数7】
はボール中心の速度、
【0025】
【数8】
はボール中心から接触点へのベクトル、また
【0026】
【数9】
はボールの絶対角速度である。ボールの角速度は2つの部分から構成される。すなわち、保持器の角速度
【0027】
【数10】
および転動体の角速度
【0028】
【数11】
である。2つの成分は、同方向ではないことに留意されたい。
【0029】
【数12】
および
【0030】
【数13】
である。式(7)および(8)を代入し、両辺を接線方向に投影すると、
【0031】
【数14】
または
【0032】
【数15】
が得られる。
式(5)を(10)に代入すると、
【0033】
【数16】
が得られる。転動体18上の損傷箇所に対しては、基本周波数は2fREとなるはずであり、それは、保持器20に対して転動体18が完全な回転を行うごとに、その箇所は、内側軌道輪14および外側軌道輪12に、それぞれ1回接触することになるからである。他方で、外側軌道輪12上の損傷箇所については、各転動体18が、外側軌道輪12に対して保持器20の各回転中に1回その箇所の上を回転することになり、したがって、
【0034】
【数17】
となる。同様に内側軌道輪の損傷箇所について、
【0035】
【数18】
を得る。
【0036】
加速度の包絡線処理または復調は、回転する装置の状態を判定するために、分析者の能力を非常に高める信号処理技法である。簡単に言うと、包絡線処理技法は、損傷のシグネチャを強調するために、低周波数で高振幅の信号を除去し、低振幅で高周波数の成分を検出する。分離された高周波数である欠陥のシグネチャは、次いで、整流および包絡線検出を用いて、周波数ドメインへと変換される。
【0037】
図2は、回転する軸受の損傷シグネチャを向上させるために当技術分野で知られた加速度包絡線信号処理技法100を示す流れ図を示している。欠陥が軸受で生じた場合、回転中に繰返し衝撃が生ずる。この種の衝撃は、ブロック102、104、106で示されるものなど、システム中に広帯域の応答を励起する。しかし、欠陥衝撃からの応答レベルは、通常、非常に低い。ダイナミックレンジが低い場合、高調波信号は雑音レベルに下がる。高いダイナミックレンジを有する場合であっても、高調波はやはり短いスパン内で消滅し、見ることはできない。軸受の欠陥を検出するための鍵は、高振幅の回転振動信号およびシステムの基本共振周波数応答を含めることなく、低振幅の軸受欠陥高調波を捕捉することである。これを達成するために、ブロック108で示されるものなど、「帯域通過」フィルタが、シグネチャ(複数可)を分離するために使用される。高周波数の損傷応答が捕捉された後、信号は、ブロック110で示されるものなどの整流装置を通り、ブロック112で示されるものなど信号の包絡線が整流された信号から検出される。包絡線信号に対して、ブロック114で示されるものなどの低域通過フィルタを、かつブロック116で示されるものなどのFFT技法を適用することにより、損傷を受けた軸受構成要素と一意に関連する1つまたは複数の周波数、および振幅(複数可)が明らかになる。
【0038】
振動は、回転する機械の軸速度の倍数および約数で生ずる。例えば、軸が、60Hzである3600rpmで回転している場合、この周波数の倍数の応答を、時には、この周波数の何分の1かのこともあるが、観察することができる。これらの倍数は、次数(または音楽用語で高調波)である。次数ODRと、軸速度RPMと、Hzの周波数fとの間の一般的な関係は、
【0039】
【数19】
である。
【0040】
周波数Hzの代わりに次数を使用する目的は、次数は、軸速度と一定に保たれることである。1次は常に軸速度であり、2次は常に軸速度の2倍であり、以下同様である。
【0041】
回転を均等に増分させてサンプリングするものなど、時間を均等に増分させるサンプリング以外のサンプリング技法を回転機械用途に対して使用しなくてはならない。回転を均等に増分させてサンプリングすることは同期サンプリングと呼ばれる。同期サンプリング技法は、回転機械に関連するデータ処理に対して非常に有用であり、特に、軸速度が変化する用途に対して有用である。
【0042】
フーリエ変換が、同期させてサンプリングされたデータに対して行われた場合、その結果は、周波数タイプのスケールの関数における1組のデータであるが、今回は、それはHzではなく、次数の増分である。次数分析は、通常のFFTを行い、次いで、一定の軸速度の場合には軸速度信号を用いて、周波数ドメインを次数ドメインへと変換することにより達成することができる。速度がFFTの長さにわたって変化する場合、次数ドメインの振幅は、ある範囲の次数で不明瞭となる。
【0043】
回転機械からの信号を処理する上で、同期サンプリングは好ましいが、実行するのが困難である。特に、規則的な時間ステップでサンプリングする必要のあるσ−δタイプのアナログ−デジタル変換器(ADC)を備えるものなど、何らかのデータ取得装置を使用し、同期させてサンプリングすることは不可能である。
【0044】
本発明者らの認識した1つの解決策は、信号処理を使用して、データをデジタル的に再サンプリングすることである。訂正信号処理アルゴリズムを用いると、データは、軸からの1回転に1回の回転計信号を利用して、最初の均等な速度時間増分データから、等間隔の角度増分データへと再サンプリングすることができる。
【0045】
1回転に1回の信号は、損傷周波数が軌道輪の速度差の関数なので、両方の軌道輪が動いているときには、物理的に得ることができない。上記の原理に留意して、このような用途に対して望ましい有効な同期サンプリングを達成するための合成同期サンプリング技法が、次に、本発明の一実施形態による図3〜6を参照して以下で述べられる。
【0046】
均等な時間でサンプリングされたデータは、図3で示すように、回転計を用いて容易に均等な空間のデータへと変換することができる。欠けている回転計信号の場合、また既知の速度(または速度差)関数を用いる場合、合成された回転計信号を、速度(または速度差)関数から生成することができ、さらに、均等な空間サンプリングを、本発明の一実施形態による図4を参照して以下で論ずるステップ1〜5を用いて実行することができる。
【0047】
1)最初に、時間ゼロにおいて、回転計パルスが存在するものと仮定する、
2)i番目の回転計パルスが時間t1に位置する場合、(i+1)番目の回転計パルスは時間t2に位置するものと仮定する、
3)t1からt2までの平均の軸速度nを計算し、
Δt1=t2−t1、およびΔt2=60/n
と定式化する。
【0048】
4)|Δt1−Δt2|が最小化されるように、かつt2がその場合、(i+1)番目の回転計パルスの近似的な位置にあるようなt2を探す、また
5)各軌道輪に対する回転計信号を取得した後、速度差に関して同期サンプリングを実施する。
【0049】
図5は、本発明の一実施形態による合成同期サンプリング技法を示す流れ図である。合成同期サンプリングは、振動センサデータ120,および回転計(速度)データ122、123を用いて実施される。合成回転計124は、上記で述べたものと同様の方法で、速度データ122、123を用いて実施される。
【0050】
振動センサデータ120は、事前に調整され、望ましい高いA/Dサンプリングレートでデジタル化される。帯域通過フィルタ126が、次いで、通常10KHz以上である、対象とする周波数範囲を分離するために適用される。ヒルベルト変換128が、分離された信号の包絡線検出129に適用される。
【0051】
次いで、合成回転計124データ、および分離された信号の包絡線データを用いて、同期サンプリング130が行われて、時間ドメインの包絡線を合成されたサイクルドメインデータへと変換する。
【0052】
高速フーリエ変換(FFT)が、サイクルドメインデータに適用されて、所望の次数分析132を生成する。得られた次数ドメインデータは、平均されて、必要に応じて差動軸受の損傷シグネチャ(複数可)をさらに強調する。得られた損傷シグネチャ134は、次数ドメインに固定される。
【0053】
一用途において、差動軸受の外側軌道輪がEDMの傷と共に組み込まれた。式(12)に基づき、速度構成における周波数は、1850Hz、または速度差の次数が15.835であると判定された。
【0054】
上記で述べた合成同期サンプリングおよび加速度包絡線化技法を使用しない場合、図6の上の部分で分かるように、加速度計信号の通常のFFTスペクトルから、何らかのシグネチャを特定することは、ほとんど不可能であった。
【0055】
通常の加速度包絡線処理の場合、図6の中央部分で分かるように、1850Hz付近のわずかな隆起部を、通常の加速度包絡線処理技法を用いてもほとんど視認することができなかった。これは、両方の軌道輪速度が正確に制御されていないためである。軌道輪におけるわずかなドリフトが、軸受のシグネチャ周波数において増幅された変動を増加させている。その結果、軸受のシグネチャは、1850Hz近傍で不明瞭になっている。
【0056】
損傷のシグネチャは、本明細書で述べられた原理による合成同期サンプリング技法が適用された場合に限って図6の底部で示すように、限定することなく、CRTのフラットパネル表示装置など、グラフィック表示装置上で非常に強調されており、その場合、損傷のシグネチャは、正確に次数14.835に位置する。
【0057】
上記で述べた原理は、限定することなく、航空機エンジンの差動軸受用途などの用途に適しており、その場合、エンジンは、内側軌道輪と外側軌道輪が共に回転しているHP軸およびLP軸を含む。上記で述べた原理はまた、かなりの伝動装置構成を使用し、かつ対象とする基本周波数の高調波である倍数を生成しうる風力タービン用途に対しても適している。
【0058】
本明細書で述べた諸実施形態は、有利には、極めて低い信号対雑音比環境を提供するように、対象とする軸受から離れた位置にある、航空機エンジンのケーシング上に配置された1つまたは複数の広帯域センサを用いて使用することができる。図7は、本発明の一実施形態による実行可能な解決策を提供するのに適した、航空機エンジンのケーシング150上の様々な点に、速度センサ152、154、および加速度計156を配置することを示している。
【0059】
上記で述べた原理は、有利にはさらに、時間ドメインで同期サンプリングを実行し、また周波数(次数)ドメインで平均化を実行するための技法を提供して、高精度の回転計(速度)信号に対する必要性をなくす。これらの原理は、軸の回転速度(複数可)が可変であり、かつ物理的な回転計が実現可能ではない用途の軸受監視に適している。
【0060】
本発明のいくつかの機能だけが本明細書で例示され、かつ述べられてきたが、当業者であれば、多くの修正および変更が想到されよう。したがって、添付の特許請求の範囲は、このような修正および変更のすべてを、本発明の真の趣旨に含まれるものとして包含することが意図されることを理解されたい。
【符号の説明】
【0061】
10 差動玉軸受アセンブリ
12 外側の軌道、外側軌道輪
14 内側の軌道、内側軌道輪
16 軸
18 転動体
20 保持器
150 航空機エンジンのケーシング
152 速度センサ
154 速度センサ
156 加速度計
【技術分野】
【0001】
本発明は、一般に、エンジン軸受の振動波(vibration signature)に関し、より詳細には、エンジンの差動軸受に関連する差動軸受の損傷シグネチャを強調するためのサンプリングおよび加速度包絡線処理技法に関する。
【背景技術】
【0002】
差動軸受は、最も脆弱なエンジン部品の一部であり、さらに、動作状態を監視するのが最も困難なエンジン部品の一部である。
【0003】
振動波は、通常の転動体軸受システムに関連する最も信頼性のある早期の警告データを提供する。この点に関して、加速度包絡線処理ベースの技法が、何年にもわたり存在してきた。同期サンプリング技法もまた、軸受のシグネチャの強調において、特に可変速の用途で広く使用される。
【0004】
同期サンプリングは、均等な時間によるサンプリングを、均等な軸円周角のサンプリングへと変換する技法であり、したがって、ロータ速度依存性が除かれる。これは通常、静的な検出器を通過する回転部分の物理的なイベントをカウントすることにより軸の動作を監視するために使用されるエンコーダを軸受に取り付けることにより達成される。
【0005】
しかし、差動軸受動作における軸受の軌道輪は共に動作しており、軌道輪の速度は、通常、軸受動作中に正確には制御されない。さらに、差動軸受アセンブリは、他の機械的構成要素下に埋め込まれており、また軸受のシグネチャは軌道輪間の速度差に比例する。したがって、同期サンプリングは、元々小さくかつ速度差に依存するシグネチャを抽出する必要がある。軌道輪が移動するため、差動速度に対するエンコーダは、物理的に差動軸受には適していない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】欧州特許第1304463号
【発明の概要】
【発明が解決しようとする課題】
【0007】
軸受の動作中に、差動軸受の損傷シグネチャを確認するための従来のサンプリング技法に関連する上記で述べた欠点を克服するサンプリング技法を提供することは有利なはずである。
【課題を解決するための手段】
【0008】
簡単に言うと、本発明の一実施形態によれば、差動軸受の損傷を検出する方法は、
内側および外側で回転する軸受軌道輪に対する複数の速度信号を生成するステップと、
内側および外側軌道輪の速度差に対応する回転計信号を合成するステップと、
合成された速度差回転計信号に応じて、軸受の振動データを同期させてサンプリングし、少なくとも1つの軸受損傷シグネチャに対応する合成されたサイクルドメインデータを生成するステップとを含む。
【0009】
本発明の他の実施形態によれば、差動軸受損傷のシグネチャを強調する方法は、
差動軸受の軌道輪のそれぞれに対する複数の速度信号を生成するステップと、
少なくとも1つの差動軸受の軌道輪に対する少なくとも1つの回転計信号を合成するステップと、
複数の速度信号、および少なくとも1つの合成された回転計信号に応じて、軌道輪速度差に対して、差動軸受に関連する振動データを同期させてサンプリングし、少なくとも1つの軸受損傷シグネチャに対応する合成されたサイクルドメインデータを生成するステップとを含む。
【0010】
本発明のさらに他の実施形態によれば、軸受損傷を検出するためのシステムは、
軸受アセンブリの軌道輪速度に基づいて、速度信号が、欠けている回転計信号の近似的な位置に対応するように、軸受アセンブリに対する速度信号を生成するように構成された合成回転計と、
速度信号に基づいて、軸受アセンブリに関連する振動データを同期させてサンプリングして、少なくとも1つの軸受アセンブリの損傷シグネチャに対応する合成されたサイクルドメインデータを生成するように構成されたサンプリング機構と
を備える。
【0011】
本発明のこれらの、および他の特徴、態様、ならびに利点は、添付の図面を参照して以下の詳細な説明を読めばさらによく理解されよう。図中、同様の文字は諸図面を通して同様の部品を表す。
【図面の簡単な説明】
【0012】
【図1】当技術分野で知られている差動玉軸受アセンブリの図である。
【図2】回転する軸受の損傷シグネチャを強調させるために当技術分野で知られた加速度包絡線信号処理技法を示す流れ図である。
【図3】本発明の一実施形態による回転計により生成された均等な時間でサンプリングされたデータを、均等な空間データへと変換することを示す波形図である。
【図4】本発明の一実施形態による速度データから生成された合成された回転計データを示す波形図である。
【図5】本発明の一実施形態による合成同期サンプリング技法を示す流れ図である。
【図6】本発明の一実施形態による同期化された平均の包絡線処理されたスペクトルを、平均したFFTスペクトルと比較し、かつ平均した包絡線スペクトルと比較した図である。
【図7】本発明の一実施形態による航空機エンジンケーシング上の様々な点に速度センサおよび加速度計を配置することを示す図である。
【発明を実施するための形態】
【0013】
上記で特定した諸図面は、代替の諸実施形態を記載しているが、論議の中で気付かれるように、本発明の他の実施形態も企図される。すべての場合において、本開示は、限定するためではなく、代表させるために本発明の例示された諸実施形態を提示している。本発明の原理の範囲および趣旨に含まれる数多くの他の変形形態および実施形態を、当業者であれば考案することができる。
【0014】
図3〜6を参照して以下で述べられる本発明の実施形態を理解し易くするために、加速度包絡線処理および同期サンプリングの原理における背景が、当技術分野で知られた差動玉軸受アセンブリ10を示す図1と、回転する軸受の損傷シグネチャを強調するために、当技術分野で知られた加速度包絡線信号処理技法を示す流れ図を示す図2とを参照して次に以下で述べられる。減摩性軸受、すなわち、ローラまたはボールなどの転動体を含む軸受は、軸受の幾何形状および回転速度に依存する特定の周波数で振動を励起する力を生ずる。これらの振動周波数は、軸受トーン(tone)と呼ばれる。すべてのこのような軸受は、その状態に関係なく、軸受が悪化するにつれてレベルが増加する、何らかのレベルの軸受トーンを生ずるようになる。
【0015】
一般に、転動体軸受に関連する周波数は4つ存在する。それらは、
1)保持器周波数、または基本列周波数(FTF:Fundamental Train Frequency)
2)転動体周波数
3)ボールが内側の軌道を通過する周波数
4)ボールが外側の軌道を通過する周波数
を含む。
【0016】
多くの工業用途では、外側の軌道12は、通常、固定されており、内側の軌道14が軸16と共に回転している。しかし、最も一般的な場合では、内側の軌道14と外側の軌道12は共に、異なる速度で回転することができる。図1で示すように、外側の軌道12は、速度NORで回転しているが、内側の軌道14は、速度NIRで回転している。転動体18と、軌道12、14との間の接触点において、速度は、
【0017】
【数1】
および
【0018】
【数2】
であり、式中、Dおよびdは、図1で示す寸法を表す。転動体18と、軌道12、14との間は完全な回転であると仮定すると、転動体18または保持器20の中心の速度は、
【0019】
【数3】
である。したがって、保持器の周波数は、
【0020】
【数4】
である。
【0021】
転動体18に対するスピン周波数は、転動体(ボール)18と外側軌道輪の接触点の境界面で滑りがないと仮定すると、同様に決定することができる。すべての接触点で、ボールの速度は、
【0022】
【数5】
であり、式中、
【0023】
【数6】
は接触点における外側軌道輪12の速度であり、
【0024】
【数7】
はボール中心の速度、
【0025】
【数8】
はボール中心から接触点へのベクトル、また
【0026】
【数9】
はボールの絶対角速度である。ボールの角速度は2つの部分から構成される。すなわち、保持器の角速度
【0027】
【数10】
および転動体の角速度
【0028】
【数11】
である。2つの成分は、同方向ではないことに留意されたい。
【0029】
【数12】
および
【0030】
【数13】
である。式(7)および(8)を代入し、両辺を接線方向に投影すると、
【0031】
【数14】
または
【0032】
【数15】
が得られる。
式(5)を(10)に代入すると、
【0033】
【数16】
が得られる。転動体18上の損傷箇所に対しては、基本周波数は2fREとなるはずであり、それは、保持器20に対して転動体18が完全な回転を行うごとに、その箇所は、内側軌道輪14および外側軌道輪12に、それぞれ1回接触することになるからである。他方で、外側軌道輪12上の損傷箇所については、各転動体18が、外側軌道輪12に対して保持器20の各回転中に1回その箇所の上を回転することになり、したがって、
【0034】
【数17】
となる。同様に内側軌道輪の損傷箇所について、
【0035】
【数18】
を得る。
【0036】
加速度の包絡線処理または復調は、回転する装置の状態を判定するために、分析者の能力を非常に高める信号処理技法である。簡単に言うと、包絡線処理技法は、損傷のシグネチャを強調するために、低周波数で高振幅の信号を除去し、低振幅で高周波数の成分を検出する。分離された高周波数である欠陥のシグネチャは、次いで、整流および包絡線検出を用いて、周波数ドメインへと変換される。
【0037】
図2は、回転する軸受の損傷シグネチャを向上させるために当技術分野で知られた加速度包絡線信号処理技法100を示す流れ図を示している。欠陥が軸受で生じた場合、回転中に繰返し衝撃が生ずる。この種の衝撃は、ブロック102、104、106で示されるものなど、システム中に広帯域の応答を励起する。しかし、欠陥衝撃からの応答レベルは、通常、非常に低い。ダイナミックレンジが低い場合、高調波信号は雑音レベルに下がる。高いダイナミックレンジを有する場合であっても、高調波はやはり短いスパン内で消滅し、見ることはできない。軸受の欠陥を検出するための鍵は、高振幅の回転振動信号およびシステムの基本共振周波数応答を含めることなく、低振幅の軸受欠陥高調波を捕捉することである。これを達成するために、ブロック108で示されるものなど、「帯域通過」フィルタが、シグネチャ(複数可)を分離するために使用される。高周波数の損傷応答が捕捉された後、信号は、ブロック110で示されるものなどの整流装置を通り、ブロック112で示されるものなど信号の包絡線が整流された信号から検出される。包絡線信号に対して、ブロック114で示されるものなどの低域通過フィルタを、かつブロック116で示されるものなどのFFT技法を適用することにより、損傷を受けた軸受構成要素と一意に関連する1つまたは複数の周波数、および振幅(複数可)が明らかになる。
【0038】
振動は、回転する機械の軸速度の倍数および約数で生ずる。例えば、軸が、60Hzである3600rpmで回転している場合、この周波数の倍数の応答を、時には、この周波数の何分の1かのこともあるが、観察することができる。これらの倍数は、次数(または音楽用語で高調波)である。次数ODRと、軸速度RPMと、Hzの周波数fとの間の一般的な関係は、
【0039】
【数19】
である。
【0040】
周波数Hzの代わりに次数を使用する目的は、次数は、軸速度と一定に保たれることである。1次は常に軸速度であり、2次は常に軸速度の2倍であり、以下同様である。
【0041】
回転を均等に増分させてサンプリングするものなど、時間を均等に増分させるサンプリング以外のサンプリング技法を回転機械用途に対して使用しなくてはならない。回転を均等に増分させてサンプリングすることは同期サンプリングと呼ばれる。同期サンプリング技法は、回転機械に関連するデータ処理に対して非常に有用であり、特に、軸速度が変化する用途に対して有用である。
【0042】
フーリエ変換が、同期させてサンプリングされたデータに対して行われた場合、その結果は、周波数タイプのスケールの関数における1組のデータであるが、今回は、それはHzではなく、次数の増分である。次数分析は、通常のFFTを行い、次いで、一定の軸速度の場合には軸速度信号を用いて、周波数ドメインを次数ドメインへと変換することにより達成することができる。速度がFFTの長さにわたって変化する場合、次数ドメインの振幅は、ある範囲の次数で不明瞭となる。
【0043】
回転機械からの信号を処理する上で、同期サンプリングは好ましいが、実行するのが困難である。特に、規則的な時間ステップでサンプリングする必要のあるσ−δタイプのアナログ−デジタル変換器(ADC)を備えるものなど、何らかのデータ取得装置を使用し、同期させてサンプリングすることは不可能である。
【0044】
本発明者らの認識した1つの解決策は、信号処理を使用して、データをデジタル的に再サンプリングすることである。訂正信号処理アルゴリズムを用いると、データは、軸からの1回転に1回の回転計信号を利用して、最初の均等な速度時間増分データから、等間隔の角度増分データへと再サンプリングすることができる。
【0045】
1回転に1回の信号は、損傷周波数が軌道輪の速度差の関数なので、両方の軌道輪が動いているときには、物理的に得ることができない。上記の原理に留意して、このような用途に対して望ましい有効な同期サンプリングを達成するための合成同期サンプリング技法が、次に、本発明の一実施形態による図3〜6を参照して以下で述べられる。
【0046】
均等な時間でサンプリングされたデータは、図3で示すように、回転計を用いて容易に均等な空間のデータへと変換することができる。欠けている回転計信号の場合、また既知の速度(または速度差)関数を用いる場合、合成された回転計信号を、速度(または速度差)関数から生成することができ、さらに、均等な空間サンプリングを、本発明の一実施形態による図4を参照して以下で論ずるステップ1〜5を用いて実行することができる。
【0047】
1)最初に、時間ゼロにおいて、回転計パルスが存在するものと仮定する、
2)i番目の回転計パルスが時間t1に位置する場合、(i+1)番目の回転計パルスは時間t2に位置するものと仮定する、
3)t1からt2までの平均の軸速度nを計算し、
Δt1=t2−t1、およびΔt2=60/n
と定式化する。
【0048】
4)|Δt1−Δt2|が最小化されるように、かつt2がその場合、(i+1)番目の回転計パルスの近似的な位置にあるようなt2を探す、また
5)各軌道輪に対する回転計信号を取得した後、速度差に関して同期サンプリングを実施する。
【0049】
図5は、本発明の一実施形態による合成同期サンプリング技法を示す流れ図である。合成同期サンプリングは、振動センサデータ120,および回転計(速度)データ122、123を用いて実施される。合成回転計124は、上記で述べたものと同様の方法で、速度データ122、123を用いて実施される。
【0050】
振動センサデータ120は、事前に調整され、望ましい高いA/Dサンプリングレートでデジタル化される。帯域通過フィルタ126が、次いで、通常10KHz以上である、対象とする周波数範囲を分離するために適用される。ヒルベルト変換128が、分離された信号の包絡線検出129に適用される。
【0051】
次いで、合成回転計124データ、および分離された信号の包絡線データを用いて、同期サンプリング130が行われて、時間ドメインの包絡線を合成されたサイクルドメインデータへと変換する。
【0052】
高速フーリエ変換(FFT)が、サイクルドメインデータに適用されて、所望の次数分析132を生成する。得られた次数ドメインデータは、平均されて、必要に応じて差動軸受の損傷シグネチャ(複数可)をさらに強調する。得られた損傷シグネチャ134は、次数ドメインに固定される。
【0053】
一用途において、差動軸受の外側軌道輪がEDMの傷と共に組み込まれた。式(12)に基づき、速度構成における周波数は、1850Hz、または速度差の次数が15.835であると判定された。
【0054】
上記で述べた合成同期サンプリングおよび加速度包絡線化技法を使用しない場合、図6の上の部分で分かるように、加速度計信号の通常のFFTスペクトルから、何らかのシグネチャを特定することは、ほとんど不可能であった。
【0055】
通常の加速度包絡線処理の場合、図6の中央部分で分かるように、1850Hz付近のわずかな隆起部を、通常の加速度包絡線処理技法を用いてもほとんど視認することができなかった。これは、両方の軌道輪速度が正確に制御されていないためである。軌道輪におけるわずかなドリフトが、軸受のシグネチャ周波数において増幅された変動を増加させている。その結果、軸受のシグネチャは、1850Hz近傍で不明瞭になっている。
【0056】
損傷のシグネチャは、本明細書で述べられた原理による合成同期サンプリング技法が適用された場合に限って図6の底部で示すように、限定することなく、CRTのフラットパネル表示装置など、グラフィック表示装置上で非常に強調されており、その場合、損傷のシグネチャは、正確に次数14.835に位置する。
【0057】
上記で述べた原理は、限定することなく、航空機エンジンの差動軸受用途などの用途に適しており、その場合、エンジンは、内側軌道輪と外側軌道輪が共に回転しているHP軸およびLP軸を含む。上記で述べた原理はまた、かなりの伝動装置構成を使用し、かつ対象とする基本周波数の高調波である倍数を生成しうる風力タービン用途に対しても適している。
【0058】
本明細書で述べた諸実施形態は、有利には、極めて低い信号対雑音比環境を提供するように、対象とする軸受から離れた位置にある、航空機エンジンのケーシング上に配置された1つまたは複数の広帯域センサを用いて使用することができる。図7は、本発明の一実施形態による実行可能な解決策を提供するのに適した、航空機エンジンのケーシング150上の様々な点に、速度センサ152、154、および加速度計156を配置することを示している。
【0059】
上記で述べた原理は、有利にはさらに、時間ドメインで同期サンプリングを実行し、また周波数(次数)ドメインで平均化を実行するための技法を提供して、高精度の回転計(速度)信号に対する必要性をなくす。これらの原理は、軸の回転速度(複数可)が可変であり、かつ物理的な回転計が実現可能ではない用途の軸受監視に適している。
【0060】
本発明のいくつかの機能だけが本明細書で例示され、かつ述べられてきたが、当業者であれば、多くの修正および変更が想到されよう。したがって、添付の特許請求の範囲は、このような修正および変更のすべてを、本発明の真の趣旨に含まれるものとして包含することが意図されることを理解されたい。
【符号の説明】
【0061】
10 差動玉軸受アセンブリ
12 外側の軌道、外側軌道輪
14 内側の軌道、内側軌道輪
16 軸
18 転動体
20 保持器
150 航空機エンジンのケーシング
152 速度センサ
154 速度センサ
156 加速度計
【特許請求の範囲】
【請求項1】
差動軸受の損傷を検出する方法であって、
内側および外側で回転する軸受軌道輪に対する複数の速度信号を生成するステップと、
前記内側および外側軌道輪の速度差に対応する回転計信号を合成するステップと、
前記合成された速度差回転計信号に応じて、軸受の振動データを同期させてサンプリングし、少なくとも1つの軸受損傷シグネチャに対応する合成されたサイクルドメインデータを生成するステップと
を含む方法。
【請求項2】
速度差回転計を合成する前記ステップが、
開始時に回転計パルスが存在すると仮定するステップと、
前記開始時間の後で、かつ欠けている回転計パルスの直前の第1の時間における回転計パルスの位置を特定するステップと、
前記欠けている回転計パルスに対応する第2の時間に、回転計パルスが存在すると仮定するステップと、
前記第1の時間と前記第2の時間の間における平均の軸受アセンブリ軸速度を決定するステップと、
前記第1の時間における偏差と、前記第2の時間における偏差との間の差の絶対値を最小化して、前記少なくとも1つの合成された回転計信号の近似的な位置を決定するステップと
を含む、請求項1記載の方法。
【請求項3】
前記合成されたサイクルドメインデータに対して、高速フーリエ変換(FFT)を適用して、差動軸受速度の次数の増分に対応する次数ドメインで、差動軸受の損傷シグネチャを生成するステップをさらに含む、請求項1記載の方法。
【請求項4】
前記次数ドメインデータに対してスペクトル平均化を適用して、前記差動軸受の損傷シグネチャを強調するステップをさらに含む、請求項3記載の方法。
【請求項5】
前記合成された速度差回転計信号に応じて、軸受の振動データを同期させてサンプリングし、少なくとも1つの軸受損傷シグネチャに対応する合成されたサイクルドメインデータを生成する前記ステップが、
前記振動データを事前に調整し、かつ望ましい高いA/Dサンプリングレートでデジタル化するステップと、
対象とする所望の周波数範囲で信号を分離するために、前記事前に調整され、かつデジタル化された振動データを帯域通過フィルタリングするステップと、
前記分離された信号にヒルベルト変換を適用して、前記分離された信号の包絡線を生成するステップと
を含む、請求項1記載の方法。
【請求項6】
軸受軌道輪の振動データを同期させてサンプリングする前記ステップが、前記分離された信号の前記包絡線を生成する前記ステップの後に実行される、請求項5記載の方法。
【請求項7】
前記内側軌道輪および外側軌道輪が、航空機エンジンの差動軸受アセンブリに対応する、請求項1記載の方法。
【請求項8】
前記複数の速度信号が、前記差動軸受アセンブリから離れた位置にある航空機エンジンケーシング上の望ましい位置に配置された広帯域センサにより生成される、請求項1記載の方法。
【請求項9】
差動軸受の損傷シグネチャを強調する方法であって、
差動軸受の軌道輪のそれぞれに対する複数の速度信号を生成するステップと、
少なくとも1つの差動軸受の軌道輪に対する少なくとも1つの回転計信号を合成するステップと、
前記複数の速度信号、および前記少なくとも1つの合成された回転計信号に応じて、軌道輪速度差に対して、差動軸受に関連する振動データを同期させてサンプリングし、少なくとも1つの軸受損傷シグネチャに対応する合成されたサイクルドメインデータを生成するステップと
を含む方法。
【請求項10】
少なくとも1つの回転計信号を合成する前記ステップが、
開始時間の後で、かつ欠けている回転計パルスの直前の第1の時間における回転計パルスの位置を特定するステップと、
前記欠けている回転計パルスに対応する第2の時間に、回転計パルスが存在すると仮定するステップと、
前記第1の時間と前記第2の時間の間における平均の軸受アセンブリ軸速度を決定するステップと、
前記少なくとも1つの合成された回転計信号の近似的な位置を決定するために、前記第1の時間の偏差と前記第2の時間の偏差との間の差の絶対値を最小化するステップと
を含む、請求項11記載の方法。
【請求項11】
前記合成されたサイクルドメインデータに対してFFTを適用して、差動軸受の損傷シグネチャの次数の増分に対応する次数ドメインで、差動軸受の損傷シグネチャを生成するステップをさらに含む、請求項9記載の方法。
【請求項12】
前記次数ドメインデータに対してスペクトル平均化を適用して、前記差動軸受の損傷シグネチャを強調するステップをさらに含む、請求項11記載の方法。
【請求項13】
前記複数の速度信号、および前記少なくとも1つの合成された回転計信号に応じて、軌道輪速度差に対して、前記差動軸受に関連する振動データを同期させてサンプリングし、少なくとも1つの軸受損傷シグネチャに対応する合成されたサイクルドメインデータを生成する前記ステップが、
前記振動データを事前に調整し、かつ望ましい高いA/Dサンプリングレートでデジタル化するステップと、
対象とする所望の周波数範囲で信号を分離するために、前記事前に調整され、かつデジタル化された振動データを帯域通過フィルタリングするステップと、
前記分離された信号にヒルベルト変換を適用して、前記分離された信号の包絡線を生成するステップと
を含む、請求項9記載の方法。
【請求項14】
軸受軌道輪の振動データを同期させてサンプリングする前記ステップが、前記分離された信号の前記包絡線を生成する前記ステップの後に実行される、請求項13記載の方法。
【請求項15】
前記差動軸受が、航空機エンジンの差動軸受アセンブリの一部を含む、請求項9記載の方法。
【請求項16】
前記少なくとも1つの合成された回転計信号が、内側軌道輪速度および外側軌道輪速度の両方に基づく、請求項15記載の方法。
【請求項17】
前記複数の速度信号が、前記差動軸受アセンブリから離れた位置にある航空機エンジンケーシング上の望ましい位置に配置された広帯域センサにより生成される、請求項9記載の方法。
【請求項18】
軸受の損傷を検出するためのシステムであって、
軸受アセンブリの軌道輪速度に基づいて、速度信号が、欠けている回転計信号の近似的な位置に対応するように、前記軸受アセンブリに対する前記速度信号を生成するように構成された合成回転計と、
前記速度信号に基づいて、前記軸受アセンブリに関連する振動データを同期させてサンプリングして、少なくとも1つの軸受アセンブリの損傷シグネチャに対応する合成されたサイクルドメインデータを生成するように構成されたサンプリング機構と
を備えるシステム。
【請求項19】
前記軸受アセンブリが、航空機エンジンの差動軸受を含む、請求項18記載の軸受の損傷を検出するためのシステム。
【請求項20】
前記軌道輪速度が、内側軌道輪速度および外側軌道輪速度を含む、請求項19記載の軸受の損傷を検出するためのシステム。
【請求項21】
各軸受軌道輪を監視し、かつそれから振動信号を生成するように構成された振動センサと、
前記振動信号を事前に調整し、かつデジタル化して、前記振動データをそれから生成するように構成された信号処理手段と
をさらに備える、請求項18記載の軸受の損傷を検出するためのシステム。
【請求項22】
信号を、対象とする所望の周波数範囲で分離するために、前記事前に調整され、かつデジタル化された信号データをフィルタするように構成された帯域通過フィルタと、
ヒルベルト変換を、前記分離された信号に対して適用して、前記振動データに対応する前記分離された信号の包絡線を生成するように構成された信号処理手段と
をさらに備える、請求項21記載の軸受の損傷を検出するためのシステム。
【請求項23】
前記合成されたサイクルドメインデータに対してFFTを適用して、差動軸受の損傷シグネチャの次数の増分に対応する次数ドメインで、差動軸受の損傷シグネチャを生成するように構成された信号処理手段をさらに備える、請求項18記載の軸受の損傷を検出するためのシステム。
【請求項24】
前記次数ドメインデータに対してスペクトル平均化を適用して、前記差動軸受の損傷シグネチャを強調するための信号処理手段をさらに備える、請求項23記載の方法。
【請求項1】
差動軸受の損傷を検出する方法であって、
内側および外側で回転する軸受軌道輪に対する複数の速度信号を生成するステップと、
前記内側および外側軌道輪の速度差に対応する回転計信号を合成するステップと、
前記合成された速度差回転計信号に応じて、軸受の振動データを同期させてサンプリングし、少なくとも1つの軸受損傷シグネチャに対応する合成されたサイクルドメインデータを生成するステップと
を含む方法。
【請求項2】
速度差回転計を合成する前記ステップが、
開始時に回転計パルスが存在すると仮定するステップと、
前記開始時間の後で、かつ欠けている回転計パルスの直前の第1の時間における回転計パルスの位置を特定するステップと、
前記欠けている回転計パルスに対応する第2の時間に、回転計パルスが存在すると仮定するステップと、
前記第1の時間と前記第2の時間の間における平均の軸受アセンブリ軸速度を決定するステップと、
前記第1の時間における偏差と、前記第2の時間における偏差との間の差の絶対値を最小化して、前記少なくとも1つの合成された回転計信号の近似的な位置を決定するステップと
を含む、請求項1記載の方法。
【請求項3】
前記合成されたサイクルドメインデータに対して、高速フーリエ変換(FFT)を適用して、差動軸受速度の次数の増分に対応する次数ドメインで、差動軸受の損傷シグネチャを生成するステップをさらに含む、請求項1記載の方法。
【請求項4】
前記次数ドメインデータに対してスペクトル平均化を適用して、前記差動軸受の損傷シグネチャを強調するステップをさらに含む、請求項3記載の方法。
【請求項5】
前記合成された速度差回転計信号に応じて、軸受の振動データを同期させてサンプリングし、少なくとも1つの軸受損傷シグネチャに対応する合成されたサイクルドメインデータを生成する前記ステップが、
前記振動データを事前に調整し、かつ望ましい高いA/Dサンプリングレートでデジタル化するステップと、
対象とする所望の周波数範囲で信号を分離するために、前記事前に調整され、かつデジタル化された振動データを帯域通過フィルタリングするステップと、
前記分離された信号にヒルベルト変換を適用して、前記分離された信号の包絡線を生成するステップと
を含む、請求項1記載の方法。
【請求項6】
軸受軌道輪の振動データを同期させてサンプリングする前記ステップが、前記分離された信号の前記包絡線を生成する前記ステップの後に実行される、請求項5記載の方法。
【請求項7】
前記内側軌道輪および外側軌道輪が、航空機エンジンの差動軸受アセンブリに対応する、請求項1記載の方法。
【請求項8】
前記複数の速度信号が、前記差動軸受アセンブリから離れた位置にある航空機エンジンケーシング上の望ましい位置に配置された広帯域センサにより生成される、請求項1記載の方法。
【請求項9】
差動軸受の損傷シグネチャを強調する方法であって、
差動軸受の軌道輪のそれぞれに対する複数の速度信号を生成するステップと、
少なくとも1つの差動軸受の軌道輪に対する少なくとも1つの回転計信号を合成するステップと、
前記複数の速度信号、および前記少なくとも1つの合成された回転計信号に応じて、軌道輪速度差に対して、差動軸受に関連する振動データを同期させてサンプリングし、少なくとも1つの軸受損傷シグネチャに対応する合成されたサイクルドメインデータを生成するステップと
を含む方法。
【請求項10】
少なくとも1つの回転計信号を合成する前記ステップが、
開始時間の後で、かつ欠けている回転計パルスの直前の第1の時間における回転計パルスの位置を特定するステップと、
前記欠けている回転計パルスに対応する第2の時間に、回転計パルスが存在すると仮定するステップと、
前記第1の時間と前記第2の時間の間における平均の軸受アセンブリ軸速度を決定するステップと、
前記少なくとも1つの合成された回転計信号の近似的な位置を決定するために、前記第1の時間の偏差と前記第2の時間の偏差との間の差の絶対値を最小化するステップと
を含む、請求項11記載の方法。
【請求項11】
前記合成されたサイクルドメインデータに対してFFTを適用して、差動軸受の損傷シグネチャの次数の増分に対応する次数ドメインで、差動軸受の損傷シグネチャを生成するステップをさらに含む、請求項9記載の方法。
【請求項12】
前記次数ドメインデータに対してスペクトル平均化を適用して、前記差動軸受の損傷シグネチャを強調するステップをさらに含む、請求項11記載の方法。
【請求項13】
前記複数の速度信号、および前記少なくとも1つの合成された回転計信号に応じて、軌道輪速度差に対して、前記差動軸受に関連する振動データを同期させてサンプリングし、少なくとも1つの軸受損傷シグネチャに対応する合成されたサイクルドメインデータを生成する前記ステップが、
前記振動データを事前に調整し、かつ望ましい高いA/Dサンプリングレートでデジタル化するステップと、
対象とする所望の周波数範囲で信号を分離するために、前記事前に調整され、かつデジタル化された振動データを帯域通過フィルタリングするステップと、
前記分離された信号にヒルベルト変換を適用して、前記分離された信号の包絡線を生成するステップと
を含む、請求項9記載の方法。
【請求項14】
軸受軌道輪の振動データを同期させてサンプリングする前記ステップが、前記分離された信号の前記包絡線を生成する前記ステップの後に実行される、請求項13記載の方法。
【請求項15】
前記差動軸受が、航空機エンジンの差動軸受アセンブリの一部を含む、請求項9記載の方法。
【請求項16】
前記少なくとも1つの合成された回転計信号が、内側軌道輪速度および外側軌道輪速度の両方に基づく、請求項15記載の方法。
【請求項17】
前記複数の速度信号が、前記差動軸受アセンブリから離れた位置にある航空機エンジンケーシング上の望ましい位置に配置された広帯域センサにより生成される、請求項9記載の方法。
【請求項18】
軸受の損傷を検出するためのシステムであって、
軸受アセンブリの軌道輪速度に基づいて、速度信号が、欠けている回転計信号の近似的な位置に対応するように、前記軸受アセンブリに対する前記速度信号を生成するように構成された合成回転計と、
前記速度信号に基づいて、前記軸受アセンブリに関連する振動データを同期させてサンプリングして、少なくとも1つの軸受アセンブリの損傷シグネチャに対応する合成されたサイクルドメインデータを生成するように構成されたサンプリング機構と
を備えるシステム。
【請求項19】
前記軸受アセンブリが、航空機エンジンの差動軸受を含む、請求項18記載の軸受の損傷を検出するためのシステム。
【請求項20】
前記軌道輪速度が、内側軌道輪速度および外側軌道輪速度を含む、請求項19記載の軸受の損傷を検出するためのシステム。
【請求項21】
各軸受軌道輪を監視し、かつそれから振動信号を生成するように構成された振動センサと、
前記振動信号を事前に調整し、かつデジタル化して、前記振動データをそれから生成するように構成された信号処理手段と
をさらに備える、請求項18記載の軸受の損傷を検出するためのシステム。
【請求項22】
信号を、対象とする所望の周波数範囲で分離するために、前記事前に調整され、かつデジタル化された信号データをフィルタするように構成された帯域通過フィルタと、
ヒルベルト変換を、前記分離された信号に対して適用して、前記振動データに対応する前記分離された信号の包絡線を生成するように構成された信号処理手段と
をさらに備える、請求項21記載の軸受の損傷を検出するためのシステム。
【請求項23】
前記合成されたサイクルドメインデータに対してFFTを適用して、差動軸受の損傷シグネチャの次数の増分に対応する次数ドメインで、差動軸受の損傷シグネチャを生成するように構成された信号処理手段をさらに備える、請求項18記載の軸受の損傷を検出するためのシステム。
【請求項24】
前記次数ドメインデータに対してスペクトル平均化を適用して、前記差動軸受の損傷シグネチャを強調するための信号処理手段をさらに備える、請求項23記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2012−503208(P2012−503208A)
【公表日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2011−530084(P2011−530084)
【出願日】平成21年8月25日(2009.8.25)
【国際出願番号】PCT/US2009/054826
【国際公開番号】WO2010/033352
【国際公開日】平成22年3月25日(2010.3.25)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
【公表日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成21年8月25日(2009.8.25)
【国際出願番号】PCT/US2009/054826
【国際公開番号】WO2010/033352
【国際公開日】平成22年3月25日(2010.3.25)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
[ Back to top ]