
巻掛伝動装置における巻掛部材の張力設定のためのシステム
【課題】ベルト張力の実際の要求に対する適合化の際の最適化を図ること。
【解決手段】巻掛伝動装置の入力側に作用するトルクを表わすトルク量がコンバータロックアップクラッチが解離されている場合には第1の計算で求められたスリップ量に依存して求められ、係合されている場合には、第2の計算で求められたエンジントルク量に依存して求められ、第1の計算の際にトルクコンバータのトルク信号がコンバータロックアップクラッチの解離のもとで形成され、第2の計算の際に前記エンジントルク量を表す値が形成され、コンバータロックアップクラッチの係合中に前記トルク量の計算のために平滑的に前記第1の計算で形成されたトルク信号と第2の計算で形成された値からの最大値が用いられ、張力の設定が前記トルク量に依存して行われる。
【解決手段】巻掛伝動装置の入力側に作用するトルクを表わすトルク量がコンバータロックアップクラッチが解離されている場合には第1の計算で求められたスリップ量に依存して求められ、係合されている場合には、第2の計算で求められたエンジントルク量に依存して求められ、第1の計算の際にトルクコンバータのトルク信号がコンバータロックアップクラッチの解離のもとで形成され、第2の計算の際に前記エンジントルク量を表す値が形成され、コンバータロックアップクラッチの係合中に前記トルク量の計算のために平滑的に前記第1の計算で形成されたトルク信号と第2の計算で形成された値からの最大値が用いられ、張力の設定が前記トルク量に依存して行われる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、請求項1の上位概念による巻掛伝動装置(例えばベルト式無段変速機)における巻掛部材(例えばベルト)の張力設定のためのシステムに関している。
【背景技術】
【0002】
そのようなシステムは、例えばヨーロッパ特許出願 EP A1 0 451 887 明細書から公知である。この場合は、その変速比が無段階に調整可能である巻掛伝動装置の他に車両モータと、ロックアップクラッチによってロックアップ可能なトルクコンバータと、前進/後進切換用のクラッチがドライブトレーンに配置されている。またこの明細書は、巻掛部材と駆動側円錐プーリー及び被駆動側円錐プーリーからなる無段階式巻掛伝動装置の巻掛部材の張力設定にも関連している。この場合は被駆動側のオイルチャンバにおける油圧によって巻掛部材の張力が設定されている。
【0003】
巻掛部材の張力は、無段階式巻掛伝動装置の効率が最大であるように設定される。その際に一方で、巻掛部材の張力が小さ過ぎることによるスリップが避けられ、他方では無段階式巻掛伝動装置の高いロスを避けるために、巻掛部材の張力が過度に強すぎないようにされなければならない。この2つの要求を調和させるためには、駆動側から被駆動側に伝達されるトルクができるだけ正確にわかっていなければならない。駆動側プーリーにおける伝達すべきトルクは主に、車両エンジンのトルクと、場合によって組込まれているトルクコンバータのトルク増幅率によって定まる。巻掛部材の張力設定の際のクラッチの作動状態の考慮は行われていない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】ヨーロッパ特許出願 EP A1 0 451 887 明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の課題は、ベルト張力の実際の要求に対する適合化の際の最適化を図ることにある。
【課題を解決するための手段】
【0006】
この課題は、請求項1の特徴部分に記載された本発明によって解決される。
【発明の効果】
【0007】
本発明は、有利にはその変速比が無段階に調整可能である巻掛伝動装置の巻掛部材の張力設定のためのシステムから出発している。この巻掛伝動装置は、車両エンジンと共に、車両ドライブトレーン内の様々な作動状態を有する少なくとも1つのクラッチに配置されている。本発明の核心は、巻掛部材の張力設定が、少なくともクラッチの作動状態に依存して行われることである。これにより、ベルト張力の実際に必要なトルク伝達に対しての非常に正確な適応化が保障される。
【図面の簡単な説明】
【0008】
【図1】車両のドライブトレーンに関する配置構成を示した図
【図2】本発明によるシステムの実施例のブロック回路図
【図3】図2の個々のブロックの詳細なブロック回路図
【図4】図2の個々のブロックの詳細なブロック回路図
【発明を実施するための形態】
【0009】
本発明の有利な構成例によれば、張力の設定が油圧の設定によって行われる。つまりこの油圧の設定は、クラッチの作動状態に依存して行われる。この場合特に、巻掛伝動装置が実質的に円錐プーリーの形態の駆動側と被駆動側を有している。巻掛部材として駆動側と被駆動側を表すプーリー対の間で少なくとも1つのベルト、有利には巻掛ベルト、伝動ベルトあるいはチェーンなどが巻掛られる。油圧の設定によっては少なくとも1つの円錐プーリーと巻掛部材の押圧力が設定される。
【0010】
本発明の別の実施形態によれば、前進ギヤ段と後進ギヤ段の投入に対する制御がなされる。この場合は特に、前進用クラッチと後進用クラッチが考えられている。さらに車両エンジンと巻掛伝動装置の間のドライブトレーンに、ドライブトレーンにおいて後進ギヤ段投入の際に切換られるトルク増幅用遊星歯車装置が配設されてもよい。
【0011】
さらに車両のドライブトレーンにはトルクコンバータが配設されてもよく、またクラッチとしてロックアップクラッチが設けられてもよい。この場合は、コンバータロックアップクラッチの係合によってトルクコンバータがロックアップされる。
【0012】
クラッチは、その作動状態として少なくとも解離状態と係合状態をとり得る。この場合有利には、クラッチの係合中にさらなる作動状態が存在する。
【0013】
本発明の特に有利な構成例では、巻掛部材の張力ないしは所望の押圧力が前進用クラッチと後進用クラッチの作動状態に依存してそのつど別々に算出される。その際有利には、巻掛部材の張力が後進用クラッチの係合に対する応答の中で高められるかまたは低減される。このことは、後進ギヤ段の投入の際のトルク増減を行うドライブトレーン内での遊星歯車装置の切換に基づいている。それについては許容範囲を超えるスリップの回避のために押圧力ないし張力が増減されなければならない。
【0014】
本発明のさらに別の有利な実施形態によれば、この張力の設定が、巻掛伝動装置の入力側に作用するトルクを表す求められたトルク量に依存して行われる。このトルク量の算出は、クラッチの作動状態に依存して行われる。
【0015】
本発明のさらに別の実施例によれば、トルクコンバータのスリップを表すスリップ量と、エンジン出力側トルクを表わすエンジントルク量が求められる。コンバータロックアップクラッチの解離した状態では、変速機入力側トルクを表すトルク量が最初の計算によって少なくとも求められたスリップ量に依存して求められる。コンバータロックアップクラッチが係合された状態のもとではトルク量が第2の計算によって少なくとも求められたエンジントルク量に依存して求められる。このことは、巻掛部材の所望の押圧力とそれに伴う張力が、コンバータロックアップクラッチの作動状態に依存して算出されることを意味する。
【0016】
コンバータクラッチの解離したもとでは、一次側トルクが、つまり変速機入力側トルクが、トルクコンバータの物理的な方程式に相応してエンジン回転数とタービン回転数から算出される。この計算手法は正確である。なぜなら車両エンジンから得られる負荷信号が頻繁に、例えば周辺装置の検出エラーや車両エンジン内の摩耗に起因する大きな不精度を含むからである。この不精度は、エンジントルクが張力制御に直接用いられるシステムでは、特に車両の停止状態、つまりトルクコンバータの増幅率が高い場合に、押圧力ないし張力計算の不精度の増加に結び付く。したがってこの押圧力ないし張力は、そのような理由からこのようなシステムのもとでは車両の静止状態から発進の際に過度に高くなる。それによって不要に多くの出力が伝動装置の中で変換される。
【0017】
コンバータロックアップクラッチが係合されている場合には、一次側トルクないし変速機入力側トルクがエンジン特性マップから計算され、エンジンの慣性モーメントとポンプのトルク受容分だけ修正される。
【0018】
特に有利には、コンバータロックアップクラッチの係合期間中にトルク量として最大値が前述した第1及び第2の計算から選択される。このことは、コンバータロックアップクラッチが係合している間、一次側トルクのための2つの計算手法の間でスムーズに切換が行われることを意味している。この場合は算出された一次側トルクの大きい方が用いられる。
【0019】
本発明のさらに別の実施例によれば、クラッチの係合されている間に巻掛部材の張力とそれに伴う押圧力が、先行の作動状態での張力ないし押圧力よりも高められる。クラッチの投入接続の間に押圧力ないし張力が高められる、本発明のこの構成のもとでは、生じ得るトルクショックが巻掛部材から遠ざけられる。このことは、前進ないし後進用クラッチの投入接続の際に、あるいはコンバータロックアップクラッチの係合の際に行われる。
【0020】
本発明のさらに別の実施例によれば、巻掛部材の張力の設定が油圧によって行われ、車両エンジンによって駆動される油圧ポンプが設けられている。エンジン出力トルクを表わすエンジントルク量はこの実施例では、ポンプの作動状態を表す圧力量に依存して求められる。すなわちこのことは、一次側トルクの計算の際に、特にコンバータクラッチの係合のもとで、油圧ポンプによって受け入れられたトルクが考慮されることを意味する。
【0021】
さらに巻掛部材の張力の設定は、さらに次のようなことに依存して行われてもよい。すなわち巻掛伝動装置の変速比の調節が、過大な変速比又は過小な変速比を生じさせたか否かに依存して行われる。この場合は特に、張力ないし押圧力が、調節の間、実質的に一定した変速比の設定よりも大きな変速比に高められる。これにより有利には、より大きな変速比への迅速な変速比調整が達成され、低すぎる一次圧力によるベルトの滑りが回避され得る。
【0022】
さらに別の有利な実施例によれば、車両がアンチロック制御システム及び/又は駆動スリップ制御システム及び/又は走行安定性制御システムを有している。これらの制御システムを用いることによって、これらの制御システムの活動状態において車輪に作用する制動圧が修正される。さらに巻掛部材の張力ないしは押圧力の設定が、本発明の実施例においてそれらの制御システムの活動化に依存して行われる。特にそのような制御システムの活動化の際に、押圧力と張力が高められ、巻掛部材が大きなトルクショックから保護される。
【0023】
本発明の別の有利な実施例は従属請求項に記載されている。
【実施例】
【0024】
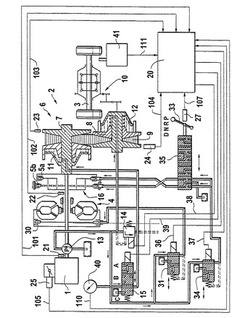
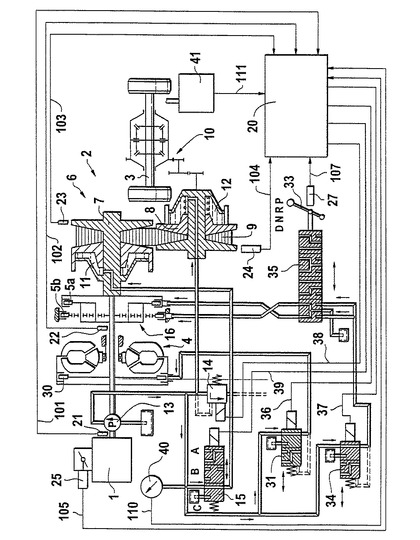
次に本発明を図面に基づき以下の明細書で詳細に説明する。図1には、自動車において、車両エンジン1から車輪のドライブシャフト3への応力伝達のための無段階式巻掛伝動装置2が示されている。この車両のドライブトレーンは、さらにコンバータロックアップクラッチを備えたトルクコンバータ4と、遊星歯車装置16を備えた前進と後進の間の切換のためのクラッチ5a及び5bを有している。この遊星歯車装置16はこの場合エンジン1と変速機6の間に配置されている。この変速機6は、駆動側円錐プーリー7(プライマリ側)と被駆動側円錐プーリー8(セカンダリ側)からなっており、この場合はチェーンまたは巻掛ベルト9(巻掛部材)を用いて応力が駆動側プーリー7から被駆動側プーリー8へ伝達される。
【0025】
円錐プーリーの各々は、軸方向に固定的にかつ軸方向で可動なディスクからなっている。駆動側プーリー7と被駆動側プーリー8に対する軸方向に可動なディスクの所期の変化によって、変速機6の変速比が高い発進変速比"ロー"から低い変速比"オーバードライブ"まで変化する。
【0026】
被駆動側プーリー8は、ディファレンシャルギヤ10を介して車輪のドライブシャフト3に接続されている。
【0027】
軸方向に可動な円錐プーリー7,8は、油圧によって調整可能であり、それに対して油圧チャンバ11及び12を有している。油圧の供給のために変速機2はオイルポンプ13を有しており、このオイルポンプ13は例えば内燃機関1の回転数に伴って動作する。
【0028】
さらに車両は、アンチロック制御システム及び/又は駆動スリップ制御システム及び/又は走行安定性制御システム41を有しており、これらのシステムは、車輪への制動圧を次のように変更させる。すなわちホイールロックないし空転が回避されるように、若しくは車両の走行安定性が高まるように変更させる。
【0029】
図1に基づいて示されている実施形態では、被駆動側のオイルチャンバ12内の押圧力が直接制御される圧力制御弁14を用いて設定される。それに対しては制御装置20が調整信号38を制御弁14に供給している。変速機6の変速比は、直接制御されたプロポーショナルバルブ15を用いて変更される。その場合制御装置20が調整信号39を設定する。
【0030】
クラッチ5aと5bの操作に対しては、セレクトレバー33を用いてセレクタバルブ35の位置が変更される。このセレクタバルブ35は、Pポジション(パーキングポジション)、Rポジション(リバースポジション)、Nポジション(ニュートラルポジション)、Dポジション(通常の前進ポジション)を有している。クラッチ5a,5bの押圧力は、直接制御される圧力制御弁34を用いて設定調整可能である。この目的のために制御装置20は調整信号37を供給する。直接制御される圧力制御弁31は、コンバータロックアップクラッチ30の係合に用いられる。このコンバータロックアップクラッチ30の係合に対しては、制御装置20によって調整信号36が設定される。
【0031】
電気的に操作可能な制御弁の正確な構成については、図1では象徴的にしか示されていないが、図1に示されているような弁とは別の、例えば予制御弁や主要制御段を伴ったものであってもよい。
【0032】
センサ21,22,23,24,25,27,40は、制御装置20に接続されている。エンジン回転数信号101の検出に対してはセンサ21が用いられる。センサ22は、トルクコンバータの出力側回転数ないし被駆動側回転数ないしタービン回転数を表す信号102を供給する。センサ23は、プライマリ回転数信号103を供給し、センサ24はセカンダリ回転数信号104を供給する。さらにセンサ25は、エンジン1の負荷信号105の検出のために用いられている。センサ27は、セレクトレバーポジション信号107を供給する。圧力センサ40は、被駆動側オイルチャンバ12内の圧力を測定し、圧力信号110を供給する。
【0033】
さらにアンチロックないし駆動スリップ制御システム(ABSないしABS/ASRシステム)41は、ABSないしABS/ASRシステムないし走行安定性制御システム(ESP)の活動の有無を表す信号111を供給する。これらのシステムは、例えば車輪のホイールロックを防ぐために、あるいは車輪の空転を防ぐために、あるいは個々の車輪の様々な制動圧の過大ないし過小制御による走行安定性の崩れを防ぐために活動化される。
【0034】
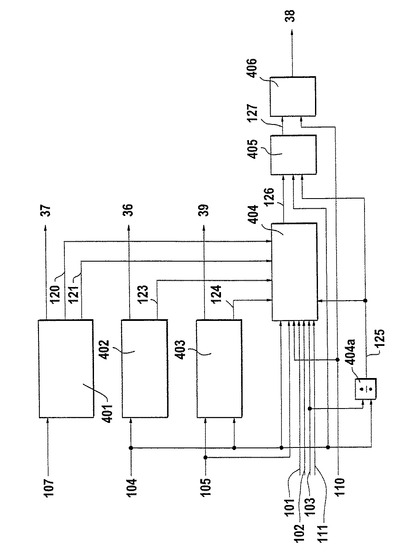
図2には、セカンダリオイルチャンバ12内の押圧力の設定に作用する全ての制御アルゴリズムのブロックがブロック回路図で示されており、これらは制御装置20内で実現される。
【0035】
計算ユニット401は、前進用クラッチ5aと後進用クラッチ5bの制御に用いられる。この計算ブロック401は、バルブ34の制御のための調整信号37を算出する。この目的のために、少なくともセレクトレバー27のポジション信号107がこのブロック401で処理される。ブロック401は、2つの状態信号120,121を形成する。これらは前進用クラッチ5aないし後進用クラッチ5bの状態を反映する。例えば前進用クラッチ5aの状態信号120が値1を有しているならば、これは前進用クラッチ5aが解離されている状態を表わす。状態信号120が値2を有しているならば、これは前進用クラッチ5aが係合される状態を意味する。状態信号120が値3を有しているならば、これは前進用クラッチ5aが係合されている状態を表している。同じようなことは後進用クラッチ5bにも当て嵌まる。
【0036】
計算ユニット402は、コンバータロックアップクラッチ30の調整信号36を供給する。それについては少なくともセカンダリ回転数信号104が評価される。このブロック402は、コンバータロックアップクラッチ30の状態を特徴付ける状態信号123を算出する。前述した前進用クラッチ5aの状態信号120に対する状態の説明は、このコンバータロックアップクラッチ30の状態信号123に対しても同じように当て嵌まる。
【0037】
計算ユニット403は、変速機6の変速比の設定のための調整信号39を供給する。それについては少なくともエンジン1の負荷信号105とセカンダリ回転数信号104が処理される。中間特性量としてブロック403は目標プライマリ回転数信号124を算出する。択一的にこの信号124は、目標エンジン回転数信号であってもよい。
【0038】
計算ユニット404aは、変速比信号125を、プライマリ回転数信号103とセカンダリ回転数信号104の商として計算する。
【0039】
計算ユニット404は、プライマリトルク信号126を形成し、この信号を基準にセカンダリオイルチャンバ12内の押圧力が設定される。計算ユニット405は、プライマリトルク信号126からセカンダリオイルチャンバ12内の押圧力に対する目標圧力信号127を求める。
【0040】
計算ユニット406は、PID制御アルゴリズムを含んでいる。このアルゴリズムを用いて、目標圧力信号127と実際値圧力信号110から調整信号38が形成される。この調整信号38は、バルブ14を用いたセカンダリオイルチャンバ12内の所望の押圧力の設定のために用いられる。
【0041】
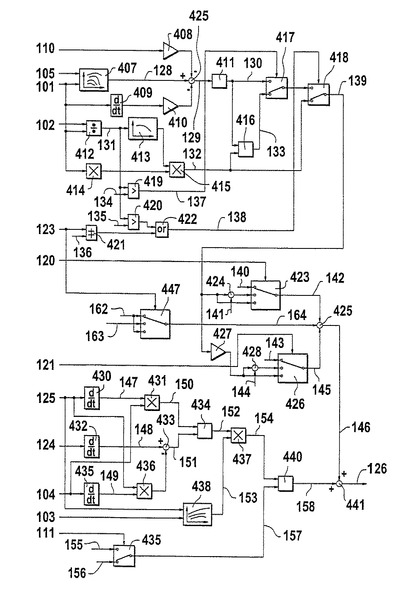
図3には計算ユニット404のブロック回路図が示されている。特性マップブロック407を用いてエンジン1の負荷信号105とエンジン回転数信号101から定常的なエンジントルク信号128が算出される。動的なエンジントルク信号129は、この定常的エンジントルク信号128から、測定された実際値圧力信号110と定数との乗算によって形成されたポンプトルク信号を減じ、さらにエンジン回転数信号101とエンジン1の慣性モーメントを表す定数との積410を減じることによって得られる。
【0042】
ブロック411は、信号130を供給する。この信号は、動的なエンジントルク信号129の絶対値である。
【0043】
計算ブロック412は、タービン回転数信号102とエンジン回転数信号101の回転数比信号131を算出する。特性マップブロック413は、この回転数比信号131から係数(ないしコード)を算出し、これはエンジン回転数信号の平方で乗算される。その結果は、コンバータロックアップクラッチ30が解離されている場合のトルクコンバータ4のトルク信号132である。
【0044】
ブロック419は、回転数比信号131と定数134を比較する。その結果としての二進信号137は、回転数比信号131が定数134よりも大きい場合、真の論理結果となる。他の場合はこの信号137は偽の論理結果となる。
【0045】
ブロック420も前記ブロック419と同じように回転数比信号131と定数135を比較する。ブロック421も論理出力信号を供給する。その出力は、コンバータクラッチの状態信号123が値136をとらない場合に真の論理結果となる。値136は1にセットされている。このことは、コンバータロックアップクラッチ30の状態信号123が"クラッチ解離"状態を有していない時にブロック421の出力が真の論理結果となり、その他の場合は偽の論理結果となることを意味する。これらのブロック420と421には、ORゲートブロック422が後置接続されている。このブロックは、論理信号138を供給する。この論理信号138は、コンバータにおける回転数比信号131が値135よりも大きいか、又はコンバータロックアップクラッチ30の状態信号123が"クラッチ解離"状態でないことを表している場合に真の論理結果となる。
【0046】
スイッチングブロック417及び418を用いることにより、どの値がコンバータ出力側トルク信号139としてセットされるかが選択される。信号138が偽の論理値を有するならば、コンバータ出力側トルク信号139は信号132の値にセットされる。信号138が真の論理値を有しかつ信号137も真の論理値を有するならば、コンバータ出力側トルク信号139は、信号130の値にセットされる。その他の場合ではコンバータ出力側トルク信号139は、2つの信号130と132の大きい方の値にセットされる。この大きい方の信号の選択に対してはブロック416が用いられる。スイッチングブロック423は、前進用クラッチ5aが操作されているもとでのプライマリトルク信号142を供給する。この場合この信号142のレベルは、前進用クラッチ5aの状態信号120の状態によって定められる。この状態信号120が値1を有するならば、信号142は定数140の値(=0)にセットされる。状態信号120が値2を有するならば、これはクラッチ5aが係合されることを表わし、信号142は、信号139と定数141の和の値にセットされる。それによって、前進用クラッチ5aの係合の際にセカンダリオイルチャンバ12内の押圧力が短時間だけ高められ、クラッチ接続の際のトルクショックによる巻掛ベルト9の滑りに反作用する効果が得られる。状態信号120が値3を有するならば、信号142は、信号139の値にセットされる。
【0047】
スイッチングブロック426は、後進用クラッチ5bが操作された場合のプライマリトルク信号145を供給する。この場合後進用クラッチ5bの状態信号121の状態は、信号145のレベルを定める。状態信号121が値1を有するならば、信号145は定数143(=0)の値にセットされる。後進用クラッチ5bの係合中若しくは係合完了のもとでは、前進用クラッチ5aとは異なって、後進走行時の遊星歯車装置15のトルク増幅が考慮されなければならない。それに対しては、ブロック427で増幅係数が用いられる。
【0048】
状態信号121が値2を有しているならば、これはクラッチが係合されることを意味し、その場合は信号145がブロック427の結果と定数144の和の値にセットされる。それにより、後進用クラッチ5bの係合の際にセカンダリオイルチャンバ12内の押圧力が短時間だけ高められ、クラッチ接続の際のトルクショックによる巻掛ベルト9の滑りに反作用する効果が得られる。状態信号121が値3を有するならば、信号145はブロック427の結果の値にセットされる。
【0049】
信号164は、コンバータロックアップクラッチ30の接続の際のセカンダリオイルチャンバ12内の押圧力の短時間の引き上げに作用する。それにより、巻掛ベルト9がコンバータロックアップクラッチ30の接続の際のベルト9の滑りにつながるトルクショックから保護される。コンバータロックアップクラッチ30の状態信号123が値2を有するならば、信号164は定数163の値にセットされる。その他の場合は信号164が定数162(=0)の値にセットされる。
【0050】
加算箇所425では、信号142と145と164が加算され、準定常的プライマリトルク信号146が形成される。
【0051】
ブロック430は、変速比信号125のグラジエント147を形成する。ブロック431では、このグラジエント147とセカンダリ回転数信号104が乗算される。この結果は、セカンダリオイルチャンバ12内の動的な圧力引き上げのための第1の信号150となる。ブロック432は目標プライマリ回転数124のグラジエント148を供給する。ブロック435は、セカンダリ回転数信号104のグラジエント149を形成する。ブロック436は、グラジエント149と変速比信号125を乗算する。この積は、信号148から減算される。その結果は、セカンダリオイルチャンバ12内の動的な圧力引上げのための第2の信号151となる。この信号151は、計算ユニット403による所望の変速比調整に基づく変速機6の予測的変速比調整に関する情報を供給する。それに対して信号150は、変速機6において測定された回転数経過に基づく変速機6の実際の変速比調整に関する情報を供給する。これらの信号150と151からはブロック434において大きい方の値が選択され、ブロック437において係数153と乗算される。その結果が信号154となる。前記係数153は、特性マップブロック438において変速比信号125とプライマリ回転数信号103に依存して算出される。
【0052】
スイッチングブロック439は、ABSないしABS/ASRシステムないし走行安定性システムESPの活動化の際に、セカンダリオイルチャンバ12内の押圧力を高める。すなわちこの押圧力は、車輪のホイールロック傾向が識別された場合、ないしは車輪の空転ないし車両の不安定性が識別された場合に高められる。ABSないしABS/ASRシステムないしESPシステムからの信号111が真の論理値であるならば、信号157は定数155の値にセットされる。その他の場合には、信号157が定数156(=0)にセットされる。
【0053】
ブロック440では、信号154と157の大きい方が選択され、動的なプライマリトルク信号158が送出される。加算箇所441では、準定常的プライマリトルク信号146と動的なプライマリトルク信号158が加算されプライマリトルク信号126が送出される。
【0054】
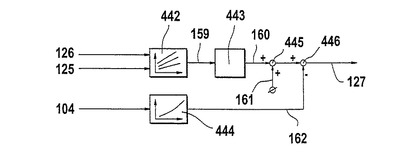
図4には、目標圧力信号127の計算が示されている。特性マップブロック442のいてはプライマリトルク信号126と変速比信号125から信号159が得られる。この信号は、緩衝ブロック443でフィルタリングされる。この場合フィルタリングのレベルは、信号エッジの上昇縁ないし下降縁のもとで様々に設定可能である。加算箇所445では定数161が加算される。この定数は、セカンダリオイルチャンバ12内の押圧力に対するリザーブを表わしている。その結果からは加算箇所446において、特性マップブロック444からのセカンダリ回転数信号104に依存した値が減じられる。結果としてセカンダリオイルチャンバ12内の押圧力に対する目標圧力信号127が得られる。
【0055】
総合的に云えることは、従来技法による押圧力計算との比較において、以下に述べるような違いが特に明らかである。
1. 所望の押圧力は、前進用クラッチと後進用クラッチの操作状態に依存して別々に計算される。それに対して従来技法ではこれらのクラッチの操作状態は区別されない。特に後進ギヤ段においては本発明のもとでは遊星歯車装置の変速比が考慮されている。
2. 所望の押圧力は、コンバータロックアップクラッチ30の操作状態に依存して計算される。コンバータロックアップクラッチ30が解離されている場合には、プライマリトルクがトルクコンバータの物理的方程式に相応してエンジン回転数とタービン回転数から算出される。この計算方法は、より正確である。なぜならエンジンから得られる負荷信号には、エンジン内の付属ユニットや摩耗が検出されないことによってしばしば精度に欠ける面があるからである。このような不正確さは、従来技法による計算方法のもとでは特に車両の停止状態において、つまりトルクコンバータの増幅度が大きい場合に、押圧力の計算精度をさらに悪化させる。それゆえにこの精度の悪化は停止状態からの発進時に益々高まり、それによって不要に多くの出力が変速機で変換される。
コンバータクラッチが係合されている場合には、プライマリトルクがエンジン特性マップから算出され、エンジンの慣性モーメントと油圧ポンプのトルク受容が補正される。
コンバータロックアップクラッチの係合の際には、2つの計算方法の間でプライマリトルクのスムーズな切換が行われる。その場合算出されたプライマリトルクの大きい方が用いられる。
3. クラッチの投入接続の間は、押圧力が高められ、生じ得るトルクショックがベルトから遠ざけられる。
4. コンバータロックアップクラッチの係合の間は、押圧力が高められ、生じ得るトルクショックがベルトから遠ざけられる。
5. コンバータクラッチが係合された状態でのプライマリトルクの計算の際には、ポンプによって受入れられたトルクが考慮される。
6. 過大な変速比傾向での変速比調整の際に、押圧力が引き上げられ、迅速な変速比調整が達成されかつ過小なプライマリ圧力によるベルト滑りが回避される。
7. ABSやASR、あるいはESPシステムの活動化の際に、押圧力が高められ、ベルトが大きなトルクショックから保護される。
【符号の説明】
【0056】
1 車両エンジン
2 無段階式巻掛伝動装置
3 ドライブシャフト
4 トルクコンバータ
5a,5b クラッチ
6 変速機
7 駆動側プーリー(プライマリ側)
8 被駆動側プーリー(セカンダリ側)
9 巻掛ベルト
10 ディファレンシャルギヤ
11 オイルチャンバ
13 オイルポンプ
14 圧力制御弁
15 プロポーショナルバルブ
16 遊星歯車装置
20 制御装置
33 セレクトレバー
35 セレクタバルブム
41 走行安定性制御システ
【技術分野】
【0001】
本発明は、請求項1の上位概念による巻掛伝動装置(例えばベルト式無段変速機)における巻掛部材(例えばベルト)の張力設定のためのシステムに関している。
【背景技術】
【0002】
そのようなシステムは、例えばヨーロッパ特許出願 EP A1 0 451 887 明細書から公知である。この場合は、その変速比が無段階に調整可能である巻掛伝動装置の他に車両モータと、ロックアップクラッチによってロックアップ可能なトルクコンバータと、前進/後進切換用のクラッチがドライブトレーンに配置されている。またこの明細書は、巻掛部材と駆動側円錐プーリー及び被駆動側円錐プーリーからなる無段階式巻掛伝動装置の巻掛部材の張力設定にも関連している。この場合は被駆動側のオイルチャンバにおける油圧によって巻掛部材の張力が設定されている。
【0003】
巻掛部材の張力は、無段階式巻掛伝動装置の効率が最大であるように設定される。その際に一方で、巻掛部材の張力が小さ過ぎることによるスリップが避けられ、他方では無段階式巻掛伝動装置の高いロスを避けるために、巻掛部材の張力が過度に強すぎないようにされなければならない。この2つの要求を調和させるためには、駆動側から被駆動側に伝達されるトルクができるだけ正確にわかっていなければならない。駆動側プーリーにおける伝達すべきトルクは主に、車両エンジンのトルクと、場合によって組込まれているトルクコンバータのトルク増幅率によって定まる。巻掛部材の張力設定の際のクラッチの作動状態の考慮は行われていない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】ヨーロッパ特許出願 EP A1 0 451 887 明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の課題は、ベルト張力の実際の要求に対する適合化の際の最適化を図ることにある。
【課題を解決するための手段】
【0006】
この課題は、請求項1の特徴部分に記載された本発明によって解決される。
【発明の効果】
【0007】
本発明は、有利にはその変速比が無段階に調整可能である巻掛伝動装置の巻掛部材の張力設定のためのシステムから出発している。この巻掛伝動装置は、車両エンジンと共に、車両ドライブトレーン内の様々な作動状態を有する少なくとも1つのクラッチに配置されている。本発明の核心は、巻掛部材の張力設定が、少なくともクラッチの作動状態に依存して行われることである。これにより、ベルト張力の実際に必要なトルク伝達に対しての非常に正確な適応化が保障される。
【図面の簡単な説明】
【0008】
【図1】車両のドライブトレーンに関する配置構成を示した図
【図2】本発明によるシステムの実施例のブロック回路図
【図3】図2の個々のブロックの詳細なブロック回路図
【図4】図2の個々のブロックの詳細なブロック回路図
【発明を実施するための形態】
【0009】
本発明の有利な構成例によれば、張力の設定が油圧の設定によって行われる。つまりこの油圧の設定は、クラッチの作動状態に依存して行われる。この場合特に、巻掛伝動装置が実質的に円錐プーリーの形態の駆動側と被駆動側を有している。巻掛部材として駆動側と被駆動側を表すプーリー対の間で少なくとも1つのベルト、有利には巻掛ベルト、伝動ベルトあるいはチェーンなどが巻掛られる。油圧の設定によっては少なくとも1つの円錐プーリーと巻掛部材の押圧力が設定される。
【0010】
本発明の別の実施形態によれば、前進ギヤ段と後進ギヤ段の投入に対する制御がなされる。この場合は特に、前進用クラッチと後進用クラッチが考えられている。さらに車両エンジンと巻掛伝動装置の間のドライブトレーンに、ドライブトレーンにおいて後進ギヤ段投入の際に切換られるトルク増幅用遊星歯車装置が配設されてもよい。
【0011】
さらに車両のドライブトレーンにはトルクコンバータが配設されてもよく、またクラッチとしてロックアップクラッチが設けられてもよい。この場合は、コンバータロックアップクラッチの係合によってトルクコンバータがロックアップされる。
【0012】
クラッチは、その作動状態として少なくとも解離状態と係合状態をとり得る。この場合有利には、クラッチの係合中にさらなる作動状態が存在する。
【0013】
本発明の特に有利な構成例では、巻掛部材の張力ないしは所望の押圧力が前進用クラッチと後進用クラッチの作動状態に依存してそのつど別々に算出される。その際有利には、巻掛部材の張力が後進用クラッチの係合に対する応答の中で高められるかまたは低減される。このことは、後進ギヤ段の投入の際のトルク増減を行うドライブトレーン内での遊星歯車装置の切換に基づいている。それについては許容範囲を超えるスリップの回避のために押圧力ないし張力が増減されなければならない。
【0014】
本発明のさらに別の有利な実施形態によれば、この張力の設定が、巻掛伝動装置の入力側に作用するトルクを表す求められたトルク量に依存して行われる。このトルク量の算出は、クラッチの作動状態に依存して行われる。
【0015】
本発明のさらに別の実施例によれば、トルクコンバータのスリップを表すスリップ量と、エンジン出力側トルクを表わすエンジントルク量が求められる。コンバータロックアップクラッチの解離した状態では、変速機入力側トルクを表すトルク量が最初の計算によって少なくとも求められたスリップ量に依存して求められる。コンバータロックアップクラッチが係合された状態のもとではトルク量が第2の計算によって少なくとも求められたエンジントルク量に依存して求められる。このことは、巻掛部材の所望の押圧力とそれに伴う張力が、コンバータロックアップクラッチの作動状態に依存して算出されることを意味する。
【0016】
コンバータクラッチの解離したもとでは、一次側トルクが、つまり変速機入力側トルクが、トルクコンバータの物理的な方程式に相応してエンジン回転数とタービン回転数から算出される。この計算手法は正確である。なぜなら車両エンジンから得られる負荷信号が頻繁に、例えば周辺装置の検出エラーや車両エンジン内の摩耗に起因する大きな不精度を含むからである。この不精度は、エンジントルクが張力制御に直接用いられるシステムでは、特に車両の停止状態、つまりトルクコンバータの増幅率が高い場合に、押圧力ないし張力計算の不精度の増加に結び付く。したがってこの押圧力ないし張力は、そのような理由からこのようなシステムのもとでは車両の静止状態から発進の際に過度に高くなる。それによって不要に多くの出力が伝動装置の中で変換される。
【0017】
コンバータロックアップクラッチが係合されている場合には、一次側トルクないし変速機入力側トルクがエンジン特性マップから計算され、エンジンの慣性モーメントとポンプのトルク受容分だけ修正される。
【0018】
特に有利には、コンバータロックアップクラッチの係合期間中にトルク量として最大値が前述した第1及び第2の計算から選択される。このことは、コンバータロックアップクラッチが係合している間、一次側トルクのための2つの計算手法の間でスムーズに切換が行われることを意味している。この場合は算出された一次側トルクの大きい方が用いられる。
【0019】
本発明のさらに別の実施例によれば、クラッチの係合されている間に巻掛部材の張力とそれに伴う押圧力が、先行の作動状態での張力ないし押圧力よりも高められる。クラッチの投入接続の間に押圧力ないし張力が高められる、本発明のこの構成のもとでは、生じ得るトルクショックが巻掛部材から遠ざけられる。このことは、前進ないし後進用クラッチの投入接続の際に、あるいはコンバータロックアップクラッチの係合の際に行われる。
【0020】
本発明のさらに別の実施例によれば、巻掛部材の張力の設定が油圧によって行われ、車両エンジンによって駆動される油圧ポンプが設けられている。エンジン出力トルクを表わすエンジントルク量はこの実施例では、ポンプの作動状態を表す圧力量に依存して求められる。すなわちこのことは、一次側トルクの計算の際に、特にコンバータクラッチの係合のもとで、油圧ポンプによって受け入れられたトルクが考慮されることを意味する。
【0021】
さらに巻掛部材の張力の設定は、さらに次のようなことに依存して行われてもよい。すなわち巻掛伝動装置の変速比の調節が、過大な変速比又は過小な変速比を生じさせたか否かに依存して行われる。この場合は特に、張力ないし押圧力が、調節の間、実質的に一定した変速比の設定よりも大きな変速比に高められる。これにより有利には、より大きな変速比への迅速な変速比調整が達成され、低すぎる一次圧力によるベルトの滑りが回避され得る。
【0022】
さらに別の有利な実施例によれば、車両がアンチロック制御システム及び/又は駆動スリップ制御システム及び/又は走行安定性制御システムを有している。これらの制御システムを用いることによって、これらの制御システムの活動状態において車輪に作用する制動圧が修正される。さらに巻掛部材の張力ないしは押圧力の設定が、本発明の実施例においてそれらの制御システムの活動化に依存して行われる。特にそのような制御システムの活動化の際に、押圧力と張力が高められ、巻掛部材が大きなトルクショックから保護される。
【0023】
本発明の別の有利な実施例は従属請求項に記載されている。
【実施例】
【0024】
次に本発明を図面に基づき以下の明細書で詳細に説明する。図1には、自動車において、車両エンジン1から車輪のドライブシャフト3への応力伝達のための無段階式巻掛伝動装置2が示されている。この車両のドライブトレーンは、さらにコンバータロックアップクラッチを備えたトルクコンバータ4と、遊星歯車装置16を備えた前進と後進の間の切換のためのクラッチ5a及び5bを有している。この遊星歯車装置16はこの場合エンジン1と変速機6の間に配置されている。この変速機6は、駆動側円錐プーリー7(プライマリ側)と被駆動側円錐プーリー8(セカンダリ側)からなっており、この場合はチェーンまたは巻掛ベルト9(巻掛部材)を用いて応力が駆動側プーリー7から被駆動側プーリー8へ伝達される。
【0025】
円錐プーリーの各々は、軸方向に固定的にかつ軸方向で可動なディスクからなっている。駆動側プーリー7と被駆動側プーリー8に対する軸方向に可動なディスクの所期の変化によって、変速機6の変速比が高い発進変速比"ロー"から低い変速比"オーバードライブ"まで変化する。
【0026】
被駆動側プーリー8は、ディファレンシャルギヤ10を介して車輪のドライブシャフト3に接続されている。
【0027】
軸方向に可動な円錐プーリー7,8は、油圧によって調整可能であり、それに対して油圧チャンバ11及び12を有している。油圧の供給のために変速機2はオイルポンプ13を有しており、このオイルポンプ13は例えば内燃機関1の回転数に伴って動作する。
【0028】
さらに車両は、アンチロック制御システム及び/又は駆動スリップ制御システム及び/又は走行安定性制御システム41を有しており、これらのシステムは、車輪への制動圧を次のように変更させる。すなわちホイールロックないし空転が回避されるように、若しくは車両の走行安定性が高まるように変更させる。
【0029】
図1に基づいて示されている実施形態では、被駆動側のオイルチャンバ12内の押圧力が直接制御される圧力制御弁14を用いて設定される。それに対しては制御装置20が調整信号38を制御弁14に供給している。変速機6の変速比は、直接制御されたプロポーショナルバルブ15を用いて変更される。その場合制御装置20が調整信号39を設定する。
【0030】
クラッチ5aと5bの操作に対しては、セレクトレバー33を用いてセレクタバルブ35の位置が変更される。このセレクタバルブ35は、Pポジション(パーキングポジション)、Rポジション(リバースポジション)、Nポジション(ニュートラルポジション)、Dポジション(通常の前進ポジション)を有している。クラッチ5a,5bの押圧力は、直接制御される圧力制御弁34を用いて設定調整可能である。この目的のために制御装置20は調整信号37を供給する。直接制御される圧力制御弁31は、コンバータロックアップクラッチ30の係合に用いられる。このコンバータロックアップクラッチ30の係合に対しては、制御装置20によって調整信号36が設定される。
【0031】
電気的に操作可能な制御弁の正確な構成については、図1では象徴的にしか示されていないが、図1に示されているような弁とは別の、例えば予制御弁や主要制御段を伴ったものであってもよい。
【0032】
センサ21,22,23,24,25,27,40は、制御装置20に接続されている。エンジン回転数信号101の検出に対してはセンサ21が用いられる。センサ22は、トルクコンバータの出力側回転数ないし被駆動側回転数ないしタービン回転数を表す信号102を供給する。センサ23は、プライマリ回転数信号103を供給し、センサ24はセカンダリ回転数信号104を供給する。さらにセンサ25は、エンジン1の負荷信号105の検出のために用いられている。センサ27は、セレクトレバーポジション信号107を供給する。圧力センサ40は、被駆動側オイルチャンバ12内の圧力を測定し、圧力信号110を供給する。
【0033】
さらにアンチロックないし駆動スリップ制御システム(ABSないしABS/ASRシステム)41は、ABSないしABS/ASRシステムないし走行安定性制御システム(ESP)の活動の有無を表す信号111を供給する。これらのシステムは、例えば車輪のホイールロックを防ぐために、あるいは車輪の空転を防ぐために、あるいは個々の車輪の様々な制動圧の過大ないし過小制御による走行安定性の崩れを防ぐために活動化される。
【0034】
図2には、セカンダリオイルチャンバ12内の押圧力の設定に作用する全ての制御アルゴリズムのブロックがブロック回路図で示されており、これらは制御装置20内で実現される。
【0035】
計算ユニット401は、前進用クラッチ5aと後進用クラッチ5bの制御に用いられる。この計算ブロック401は、バルブ34の制御のための調整信号37を算出する。この目的のために、少なくともセレクトレバー27のポジション信号107がこのブロック401で処理される。ブロック401は、2つの状態信号120,121を形成する。これらは前進用クラッチ5aないし後進用クラッチ5bの状態を反映する。例えば前進用クラッチ5aの状態信号120が値1を有しているならば、これは前進用クラッチ5aが解離されている状態を表わす。状態信号120が値2を有しているならば、これは前進用クラッチ5aが係合される状態を意味する。状態信号120が値3を有しているならば、これは前進用クラッチ5aが係合されている状態を表している。同じようなことは後進用クラッチ5bにも当て嵌まる。
【0036】
計算ユニット402は、コンバータロックアップクラッチ30の調整信号36を供給する。それについては少なくともセカンダリ回転数信号104が評価される。このブロック402は、コンバータロックアップクラッチ30の状態を特徴付ける状態信号123を算出する。前述した前進用クラッチ5aの状態信号120に対する状態の説明は、このコンバータロックアップクラッチ30の状態信号123に対しても同じように当て嵌まる。
【0037】
計算ユニット403は、変速機6の変速比の設定のための調整信号39を供給する。それについては少なくともエンジン1の負荷信号105とセカンダリ回転数信号104が処理される。中間特性量としてブロック403は目標プライマリ回転数信号124を算出する。択一的にこの信号124は、目標エンジン回転数信号であってもよい。
【0038】
計算ユニット404aは、変速比信号125を、プライマリ回転数信号103とセカンダリ回転数信号104の商として計算する。
【0039】
計算ユニット404は、プライマリトルク信号126を形成し、この信号を基準にセカンダリオイルチャンバ12内の押圧力が設定される。計算ユニット405は、プライマリトルク信号126からセカンダリオイルチャンバ12内の押圧力に対する目標圧力信号127を求める。
【0040】
計算ユニット406は、PID制御アルゴリズムを含んでいる。このアルゴリズムを用いて、目標圧力信号127と実際値圧力信号110から調整信号38が形成される。この調整信号38は、バルブ14を用いたセカンダリオイルチャンバ12内の所望の押圧力の設定のために用いられる。
【0041】
図3には計算ユニット404のブロック回路図が示されている。特性マップブロック407を用いてエンジン1の負荷信号105とエンジン回転数信号101から定常的なエンジントルク信号128が算出される。動的なエンジントルク信号129は、この定常的エンジントルク信号128から、測定された実際値圧力信号110と定数との乗算によって形成されたポンプトルク信号を減じ、さらにエンジン回転数信号101とエンジン1の慣性モーメントを表す定数との積410を減じることによって得られる。
【0042】
ブロック411は、信号130を供給する。この信号は、動的なエンジントルク信号129の絶対値である。
【0043】
計算ブロック412は、タービン回転数信号102とエンジン回転数信号101の回転数比信号131を算出する。特性マップブロック413は、この回転数比信号131から係数(ないしコード)を算出し、これはエンジン回転数信号の平方で乗算される。その結果は、コンバータロックアップクラッチ30が解離されている場合のトルクコンバータ4のトルク信号132である。
【0044】
ブロック419は、回転数比信号131と定数134を比較する。その結果としての二進信号137は、回転数比信号131が定数134よりも大きい場合、真の論理結果となる。他の場合はこの信号137は偽の論理結果となる。
【0045】
ブロック420も前記ブロック419と同じように回転数比信号131と定数135を比較する。ブロック421も論理出力信号を供給する。その出力は、コンバータクラッチの状態信号123が値136をとらない場合に真の論理結果となる。値136は1にセットされている。このことは、コンバータロックアップクラッチ30の状態信号123が"クラッチ解離"状態を有していない時にブロック421の出力が真の論理結果となり、その他の場合は偽の論理結果となることを意味する。これらのブロック420と421には、ORゲートブロック422が後置接続されている。このブロックは、論理信号138を供給する。この論理信号138は、コンバータにおける回転数比信号131が値135よりも大きいか、又はコンバータロックアップクラッチ30の状態信号123が"クラッチ解離"状態でないことを表している場合に真の論理結果となる。
【0046】
スイッチングブロック417及び418を用いることにより、どの値がコンバータ出力側トルク信号139としてセットされるかが選択される。信号138が偽の論理値を有するならば、コンバータ出力側トルク信号139は信号132の値にセットされる。信号138が真の論理値を有しかつ信号137も真の論理値を有するならば、コンバータ出力側トルク信号139は、信号130の値にセットされる。その他の場合ではコンバータ出力側トルク信号139は、2つの信号130と132の大きい方の値にセットされる。この大きい方の信号の選択に対してはブロック416が用いられる。スイッチングブロック423は、前進用クラッチ5aが操作されているもとでのプライマリトルク信号142を供給する。この場合この信号142のレベルは、前進用クラッチ5aの状態信号120の状態によって定められる。この状態信号120が値1を有するならば、信号142は定数140の値(=0)にセットされる。状態信号120が値2を有するならば、これはクラッチ5aが係合されることを表わし、信号142は、信号139と定数141の和の値にセットされる。それによって、前進用クラッチ5aの係合の際にセカンダリオイルチャンバ12内の押圧力が短時間だけ高められ、クラッチ接続の際のトルクショックによる巻掛ベルト9の滑りに反作用する効果が得られる。状態信号120が値3を有するならば、信号142は、信号139の値にセットされる。
【0047】
スイッチングブロック426は、後進用クラッチ5bが操作された場合のプライマリトルク信号145を供給する。この場合後進用クラッチ5bの状態信号121の状態は、信号145のレベルを定める。状態信号121が値1を有するならば、信号145は定数143(=0)の値にセットされる。後進用クラッチ5bの係合中若しくは係合完了のもとでは、前進用クラッチ5aとは異なって、後進走行時の遊星歯車装置15のトルク増幅が考慮されなければならない。それに対しては、ブロック427で増幅係数が用いられる。
【0048】
状態信号121が値2を有しているならば、これはクラッチが係合されることを意味し、その場合は信号145がブロック427の結果と定数144の和の値にセットされる。それにより、後進用クラッチ5bの係合の際にセカンダリオイルチャンバ12内の押圧力が短時間だけ高められ、クラッチ接続の際のトルクショックによる巻掛ベルト9の滑りに反作用する効果が得られる。状態信号121が値3を有するならば、信号145はブロック427の結果の値にセットされる。
【0049】
信号164は、コンバータロックアップクラッチ30の接続の際のセカンダリオイルチャンバ12内の押圧力の短時間の引き上げに作用する。それにより、巻掛ベルト9がコンバータロックアップクラッチ30の接続の際のベルト9の滑りにつながるトルクショックから保護される。コンバータロックアップクラッチ30の状態信号123が値2を有するならば、信号164は定数163の値にセットされる。その他の場合は信号164が定数162(=0)の値にセットされる。
【0050】
加算箇所425では、信号142と145と164が加算され、準定常的プライマリトルク信号146が形成される。
【0051】
ブロック430は、変速比信号125のグラジエント147を形成する。ブロック431では、このグラジエント147とセカンダリ回転数信号104が乗算される。この結果は、セカンダリオイルチャンバ12内の動的な圧力引き上げのための第1の信号150となる。ブロック432は目標プライマリ回転数124のグラジエント148を供給する。ブロック435は、セカンダリ回転数信号104のグラジエント149を形成する。ブロック436は、グラジエント149と変速比信号125を乗算する。この積は、信号148から減算される。その結果は、セカンダリオイルチャンバ12内の動的な圧力引上げのための第2の信号151となる。この信号151は、計算ユニット403による所望の変速比調整に基づく変速機6の予測的変速比調整に関する情報を供給する。それに対して信号150は、変速機6において測定された回転数経過に基づく変速機6の実際の変速比調整に関する情報を供給する。これらの信号150と151からはブロック434において大きい方の値が選択され、ブロック437において係数153と乗算される。その結果が信号154となる。前記係数153は、特性マップブロック438において変速比信号125とプライマリ回転数信号103に依存して算出される。
【0052】
スイッチングブロック439は、ABSないしABS/ASRシステムないし走行安定性システムESPの活動化の際に、セカンダリオイルチャンバ12内の押圧力を高める。すなわちこの押圧力は、車輪のホイールロック傾向が識別された場合、ないしは車輪の空転ないし車両の不安定性が識別された場合に高められる。ABSないしABS/ASRシステムないしESPシステムからの信号111が真の論理値であるならば、信号157は定数155の値にセットされる。その他の場合には、信号157が定数156(=0)にセットされる。
【0053】
ブロック440では、信号154と157の大きい方が選択され、動的なプライマリトルク信号158が送出される。加算箇所441では、準定常的プライマリトルク信号146と動的なプライマリトルク信号158が加算されプライマリトルク信号126が送出される。
【0054】
図4には、目標圧力信号127の計算が示されている。特性マップブロック442のいてはプライマリトルク信号126と変速比信号125から信号159が得られる。この信号は、緩衝ブロック443でフィルタリングされる。この場合フィルタリングのレベルは、信号エッジの上昇縁ないし下降縁のもとで様々に設定可能である。加算箇所445では定数161が加算される。この定数は、セカンダリオイルチャンバ12内の押圧力に対するリザーブを表わしている。その結果からは加算箇所446において、特性マップブロック444からのセカンダリ回転数信号104に依存した値が減じられる。結果としてセカンダリオイルチャンバ12内の押圧力に対する目標圧力信号127が得られる。
【0055】
総合的に云えることは、従来技法による押圧力計算との比較において、以下に述べるような違いが特に明らかである。
1. 所望の押圧力は、前進用クラッチと後進用クラッチの操作状態に依存して別々に計算される。それに対して従来技法ではこれらのクラッチの操作状態は区別されない。特に後進ギヤ段においては本発明のもとでは遊星歯車装置の変速比が考慮されている。
2. 所望の押圧力は、コンバータロックアップクラッチ30の操作状態に依存して計算される。コンバータロックアップクラッチ30が解離されている場合には、プライマリトルクがトルクコンバータの物理的方程式に相応してエンジン回転数とタービン回転数から算出される。この計算方法は、より正確である。なぜならエンジンから得られる負荷信号には、エンジン内の付属ユニットや摩耗が検出されないことによってしばしば精度に欠ける面があるからである。このような不正確さは、従来技法による計算方法のもとでは特に車両の停止状態において、つまりトルクコンバータの増幅度が大きい場合に、押圧力の計算精度をさらに悪化させる。それゆえにこの精度の悪化は停止状態からの発進時に益々高まり、それによって不要に多くの出力が変速機で変換される。
コンバータクラッチが係合されている場合には、プライマリトルクがエンジン特性マップから算出され、エンジンの慣性モーメントと油圧ポンプのトルク受容が補正される。
コンバータロックアップクラッチの係合の際には、2つの計算方法の間でプライマリトルクのスムーズな切換が行われる。その場合算出されたプライマリトルクの大きい方が用いられる。
3. クラッチの投入接続の間は、押圧力が高められ、生じ得るトルクショックがベルトから遠ざけられる。
4. コンバータロックアップクラッチの係合の間は、押圧力が高められ、生じ得るトルクショックがベルトから遠ざけられる。
5. コンバータクラッチが係合された状態でのプライマリトルクの計算の際には、ポンプによって受入れられたトルクが考慮される。
6. 過大な変速比傾向での変速比調整の際に、押圧力が引き上げられ、迅速な変速比調整が達成されかつ過小なプライマリ圧力によるベルト滑りが回避される。
7. ABSやASR、あるいはESPシステムの活動化の際に、押圧力が高められ、ベルトが大きなトルクショックから保護される。
【符号の説明】
【0056】
1 車両エンジン
2 無段階式巻掛伝動装置
3 ドライブシャフト
4 トルクコンバータ
5a,5b クラッチ
6 変速機
7 駆動側プーリー(プライマリ側)
8 被駆動側プーリー(セカンダリ側)
9 巻掛ベルト
10 ディファレンシャルギヤ
11 オイルチャンバ
13 オイルポンプ
14 圧力制御弁
15 プロポーショナルバルブ
16 遊星歯車装置
20 制御装置
33 セレクトレバー
35 セレクタバルブム
41 走行安定性制御システ
【特許請求の範囲】
【請求項1】
有利にはその変速比が無段階に調整可能である巻掛伝動装置(2)における巻掛部材(9)の張力設定のためのシステムであって、
前記巻掛伝動装置(2)は、車両エンジン(1)と、コンバータロックアップクラッチ(30)の接続によってロックアップ可能であるトルクコンバータ(4)と共に車両のドライブトレーンに配設されており、
トルクコンバータのスリップを表わすスリップ量(131)が求められ、
エンジン出力側トルクを表わすエンジントルク量(128)が求められる形式のシステムにおいて、
巻掛伝動装置(2)の入力側に作用するトルクを表わすトルク量(126)が
前記コンバータロックアップクラッチ(30)が解離されている場合には、第1の計算により、少なくとも求められたスリップ量(131)に依存して求められ、
前記コンバータロックアップクラッチ(30)が係合されている場合には、第2の計算により、少なくとも求められたエンジントルク量(128)に依存して求められ、
前記第1の計算の際にトルクコンバータのトルク信号(132)がコンバータロックアップクラッチ(30)の解離のもとで形成され、さらに第2の計算の際に前記エンジントルク量(128)を表すか又はそこから導出される値(130)が形成され、
前記コンバータロックアップクラッチ(30)の係合中に、前記トルク量(126)の計算のために平滑的に、前記第1の計算において形成されたトルク信号(132)と前記第2の計算において形成された前記値(130)からの最大値(133)が用いられ、
張力の設定が、少なくとも求められたトルク量(126)に依存して行われることを特徴とする、システム。
【請求項2】
張力の設定が、油圧の設定調整によって行われ、圧力の設定が少なくともクラッチの作動状態に依存して行われ、この場合巻掛伝動装置は、円錐プーリーの形態を有する駆動側と被駆動側を有しており、巻掛部材(9)として少なくとも1つの巻掛ベルト又は伝動ベルト又はチェーンが駆動側と被駆動側を示すプーリー対の間に張られており、油圧の設定調整によって少なくとも1つの円錐プーリーと巻掛部材(9)の間の押圧力が設定調整される、請求項1記載のシステム。
【請求項3】
前記ドライブトレーンにおいて、前進用クラッチ(5a)と後進用クラッチ(5b)が構成されており、前記巻掛部材の張力は、後進用クラッチ(5b)の係合に応じて増減される、請求項1記載のシステム。
【請求項4】
前記後進用クラッチ(5b)の係合中に、巻掛部材(9)の張力が、先行する作動状態での張力よりも高められる、請求項3記載のシステム。
【請求項5】
前記巻掛部材(9)の張力の設定調整が油圧的に行われ、車両エンジン(1)によって駆動される油圧ポンプ(139)が設けられており、エンジン出力側トルクを表わすエンジントルク量(128)の算出がポンプの作動状態を表わす圧力量(110)に依存して行われる、請求項1記載のシステム。
【請求項6】
前記巻掛部材(9)の張力の設定調整がさらに巻掛伝動装置(2)の過大又は過小変速比での変速比調整の有無に依存して行われ、この場合一定した変速比での設定調整に比べて過大な変速比での調整中に張力が高められる、請求項1記載のシステム。
【請求項7】
車両が駆動スリップ制御システム又は走行安定性制御システム(41)を有しており、これらの制御システムの活動状態中に、車輪に作用する制動圧が修正可能であり、巻掛部材(9)の張力の設定調整がさらに前記制御システムの活動化に依存して行われる、請求項1記載のシステム。
【請求項8】
トルクショックから巻掛ベルトを保護するために、前記トルク量(126)が、コンバータロックアップクラッチ(30)の接続の際に予備トルク(163)の加算によって拡大される、請求項1記載のシステム。
【請求項9】
前記トルク量(126)は、タービン回転数(102)とエンジン回転数(101)の回転数比に依存して最大値(133)から算出される、請求項1記載のシステム。
【請求項1】
有利にはその変速比が無段階に調整可能である巻掛伝動装置(2)における巻掛部材(9)の張力設定のためのシステムであって、
前記巻掛伝動装置(2)は、車両エンジン(1)と、コンバータロックアップクラッチ(30)の接続によってロックアップ可能であるトルクコンバータ(4)と共に車両のドライブトレーンに配設されており、
トルクコンバータのスリップを表わすスリップ量(131)が求められ、
エンジン出力側トルクを表わすエンジントルク量(128)が求められる形式のシステムにおいて、
巻掛伝動装置(2)の入力側に作用するトルクを表わすトルク量(126)が
前記コンバータロックアップクラッチ(30)が解離されている場合には、第1の計算により、少なくとも求められたスリップ量(131)に依存して求められ、
前記コンバータロックアップクラッチ(30)が係合されている場合には、第2の計算により、少なくとも求められたエンジントルク量(128)に依存して求められ、
前記第1の計算の際にトルクコンバータのトルク信号(132)がコンバータロックアップクラッチ(30)の解離のもとで形成され、さらに第2の計算の際に前記エンジントルク量(128)を表すか又はそこから導出される値(130)が形成され、
前記コンバータロックアップクラッチ(30)の係合中に、前記トルク量(126)の計算のために平滑的に、前記第1の計算において形成されたトルク信号(132)と前記第2の計算において形成された前記値(130)からの最大値(133)が用いられ、
張力の設定が、少なくとも求められたトルク量(126)に依存して行われることを特徴とする、システム。
【請求項2】
張力の設定が、油圧の設定調整によって行われ、圧力の設定が少なくともクラッチの作動状態に依存して行われ、この場合巻掛伝動装置は、円錐プーリーの形態を有する駆動側と被駆動側を有しており、巻掛部材(9)として少なくとも1つの巻掛ベルト又は伝動ベルト又はチェーンが駆動側と被駆動側を示すプーリー対の間に張られており、油圧の設定調整によって少なくとも1つの円錐プーリーと巻掛部材(9)の間の押圧力が設定調整される、請求項1記載のシステム。
【請求項3】
前記ドライブトレーンにおいて、前進用クラッチ(5a)と後進用クラッチ(5b)が構成されており、前記巻掛部材の張力は、後進用クラッチ(5b)の係合に応じて増減される、請求項1記載のシステム。
【請求項4】
前記後進用クラッチ(5b)の係合中に、巻掛部材(9)の張力が、先行する作動状態での張力よりも高められる、請求項3記載のシステム。
【請求項5】
前記巻掛部材(9)の張力の設定調整が油圧的に行われ、車両エンジン(1)によって駆動される油圧ポンプ(139)が設けられており、エンジン出力側トルクを表わすエンジントルク量(128)の算出がポンプの作動状態を表わす圧力量(110)に依存して行われる、請求項1記載のシステム。
【請求項6】
前記巻掛部材(9)の張力の設定調整がさらに巻掛伝動装置(2)の過大又は過小変速比での変速比調整の有無に依存して行われ、この場合一定した変速比での設定調整に比べて過大な変速比での調整中に張力が高められる、請求項1記載のシステム。
【請求項7】
車両が駆動スリップ制御システム又は走行安定性制御システム(41)を有しており、これらの制御システムの活動状態中に、車輪に作用する制動圧が修正可能であり、巻掛部材(9)の張力の設定調整がさらに前記制御システムの活動化に依存して行われる、請求項1記載のシステム。
【請求項8】
トルクショックから巻掛ベルトを保護するために、前記トルク量(126)が、コンバータロックアップクラッチ(30)の接続の際に予備トルク(163)の加算によって拡大される、請求項1記載のシステム。
【請求項9】
前記トルク量(126)は、タービン回転数(102)とエンジン回転数(101)の回転数比に依存して最大値(133)から算出される、請求項1記載のシステム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−58643(P2011−58643A)
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願番号】特願2010−288266(P2010−288266)
【出願日】平成22年12月24日(2010.12.24)
【分割の表示】特願2000−589857(P2000−589857)の分割
【原出願日】平成11年12月15日(1999.12.15)
【出願人】(390023711)ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング (2,908)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【住所又は居所原語表記】Stuttgart, Germany
【Fターム(参考)】
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願日】平成22年12月24日(2010.12.24)
【分割の表示】特願2000−589857(P2000−589857)の分割
【原出願日】平成11年12月15日(1999.12.15)
【出願人】(390023711)ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング (2,908)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【住所又は居所原語表記】Stuttgart, Germany
【Fターム(参考)】
[ Back to top ]